Cím: Léptetőmotor
Írta: gaben Dátum 2025 február 03, 18:30
Írta: gaben Dátum 2025 február 03, 18:30
Korábbi topik folytatása...
Cím: Re:Léptetőmotor
Írta: Tibi Dátum 2005 április 14, 20:58
Írta: Tibi Dátum 2005 április 14, 20:58
Üdvözlök mindenkit ezen a fórumon.
Segítségeteket szeretném kérni abban, hogy a Magi István által kifejlesztett hobby cnc gép működtetéséhez megfelelő-e a SHINANO KENSHI STP-42D201-32 léptetőmotor.
Adatai:
Shinano. Modell Nr.: STP-42D201-32
Step Angle: 1,8
Voltage: 3,7VDC
Current/Phase: 1,2A
Ressistance/Phase: 3,1Ohm
Inductance/Phase: 4,2mH
Holding Torque: 2,8Kg-cm
Valamint, hogy az István által gyártott elektronikával tudom-e ezeket a motorokat működtetni.
Köszönettel!
Segítségeteket szeretném kérni abban, hogy a Magi István által kifejlesztett hobby cnc gép működtetéséhez megfelelő-e a SHINANO KENSHI STP-42D201-32 léptetőmotor.
Adatai:
Shinano. Modell Nr.: STP-42D201-32
Step Angle: 1,8
Voltage: 3,7VDC
Current/Phase: 1,2A
Ressistance/Phase: 3,1Ohm
Inductance/Phase: 4,2mH
Holding Torque: 2,8Kg-cm
Valamint, hogy az István által gyártott elektronikával tudom-e ezeket a motorokat működtetni.
Köszönettel!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 15, 06:41
Írta: 000000000 Dátum 2005 április 15, 06:41
Csak a legfontosabbat nem írod le! Tekercs rendszere?
Cím: Re:Léptetőmotor
Írta: Tibi Dátum 2005 április 15, 18:55
Írta: Tibi Dátum 2005 április 15, 18:55
Erről a motorról én csak ezeket az adatokat tudom és a neten találtam róla még gyári leírásokat. Sajnos én nem tudom megadni, hogy ebből mi a meghatározó adat. A címet megadom és amennyiben megnézed, úgy hátha többet tudnál meg róla. A motoron látható adatokat leírtam és még annyi, hogy 6 kivezetése van. (SST42D Series)
http://www.pikpower.com/New%20Site/New_pdfs/SKC/SKCnew.pdf
Amennyiben ez így kevés, akkor megköszönöm, hogy megpróbáltál segíteni.
Üdv.
http://www.pikpower.com/New%20Site/New_pdfs/SKC/SKCnew.pdf
Amennyiben ez így kevés, akkor megköszönöm, hogy megpróbáltál segíteni.
Üdv.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 15, 19:20
Írta: 000000000 Dátum 2005 április 15, 19:20
Az említett STP-t nem találom benne. Ha 6 kivezetéses akkor nagy valószínüleg 2 fázisú, unipoláris motor ami használható a Vezérlőmmel. De ezt a dolgot egy Ohm mérővel Te is eldöntheted egyszerű méréssel!
A többi adat jó!
A többi adat jó!
Cím: Re:Léptetőmotor
Írta: Tibi Dátum 2005 április 15, 19:58
Írta: Tibi Dátum 2005 április 15, 19:58
Köszönöm a segítséged és nemsokára elkészülök a mechanikával, melyeket a Te CD-d alapján készítek. Eddig OK!
Ha elkészülök utána szeretnék venni tőled egy komplett elektronikát. Ezt majd pontosítjuk.
Üdvözlettel: Kapócs Tibor
Ha elkészülök utána szeretnék venni tőled egy komplett elektronikát. Ezt majd pontosítjuk.
Üdvözlettel: Kapócs Tibor
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 16, 08:09
Írta: 000000000 Dátum 2005 április 16, 08:09
Sok sikert!
Cím: Re:Léptetőmotor
Írta: j3rx6bsjd Dátum 2005 április 19, 08:43
Írta: j3rx6bsjd Dátum 2005 április 19, 08:43
Sziasztok!
Kellene egy kis segítség.
Van egy
"Sigma Instruments model:20-4247td200-f044"
tipusú léptetőmotorom ami 4 tekerccsel rendelkezik 6 kivezetése van és 0.4ohm/tekercs ellenállása van.Az átmérője:105mm,hossza:120mm.
A kérdésem az lenne:Mekkora feszültséget lehet ráengedni egy ekkora motorra és vajon hány amperig lehet elmenni a beállításoknál?
Üdv:Lakatos
Kellene egy kis segítség.
Van egy
"Sigma Instruments model:20-4247td200-f044"
tipusú léptetőmotorom ami 4 tekerccsel rendelkezik 6 kivezetése van és 0.4ohm/tekercs ellenállása van.Az átmérője:105mm,hossza:120mm.
A kérdésem az lenne:Mekkora feszültséget lehet ráengedni egy ekkora motorra és vajon hány amperig lehet elmenni a beállításoknál?
Üdv:Lakatos
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 19, 11:09
Írta: 000000000 Dátum 2005 április 19, 11:09
Sajnos ha nem találsz adatot a Netten, akkor csak a kisérlet marad (feltételezem nem szívesen szednéd szét). Ha van rá lehetőséged kapcsolj rá változtatható DC feszültséget, úgy, hogy legalább 2 db féltekercs legyen gerjesztve. Külömböző áramokat beállítva tesztelni kellene a melegedést 1-1h-án keresztül. Ha elérted a kb. 60°-ot, akkor ez a max áram amivel javasolt hajtatni.
Az alapfesze U=I×R és ez alapján a javasolt táp Ut=4×U. A többi finomhangolás dolga.
Az alapfesze U=I×R és ez alapján a javasolt táp Ut=4×U. A többi finomhangolás dolga.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 19, 12:11
Írta: 000000000 Dátum 2005 április 19, 12:11
A ellenállásából kiindulva elmondható, hogy ez egy alacsony feszültségű, nagy áramú motor. Az ohm törvénybe beírva, már 10V-nál is 25A folyik az egyes tekercseken (az áram a feszültséggel egyenesen arányos).
A feszültség megállapításához elöször az áramot kell kitalálni. Ehhez viszont ki kell nyitnod a motort, és meg kell mérned a tekercselésre használt huzalok keresztmetszetét. Itt van néhány érték, amely a szigetelt vörösréz vezetékek megengedhető terhelésére vonatkozik:
0,5mm² max 7,5A
0,75mm² max 9A
1mm² max 11A
1,5mm² max 14A
2,5mm² max 20A
4mm² max 25A
6mm² max 31A
ha meg van a keresztmetszet meg van az ahoz tartozó maximális áram is, ebből pedig könnyen kiszámítható a maximális feszültség. Ha köztes keresztmetszet méreted van, akkor figyelj arra is, hogy a keresztmetszet/áram nem lineárisan növekszik.
A feszültség megállapításához elöször az áramot kell kitalálni. Ehhez viszont ki kell nyitnod a motort, és meg kell mérned a tekercselésre használt huzalok keresztmetszetét. Itt van néhány érték, amely a szigetelt vörösréz vezetékek megengedhető terhelésére vonatkozik:
0,5mm² max 7,5A
0,75mm² max 9A
1mm² max 11A
1,5mm² max 14A
2,5mm² max 20A
4mm² max 25A
6mm² max 31A
ha meg van a keresztmetszet meg van az ahoz tartozó maximális áram is, ebből pedig könnyen kiszámítható a maximális feszültség. Ha köztes keresztmetszet méreted van, akkor figyelj arra is, hogy a keresztmetszet/áram nem lineárisan növekszik.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 20, 16:01
Írta: 000000000 Dátum 2005 április 20, 16:01
Lenne itt pár eladó lépetőmotor :
1. IBM unipoláris motor, 35 Ohm/fázis, felfogatás 47mm, tengely 6.35mm, 6 kivezetés 5000FT
2. Astrosyn unipoláris motor, 10 Ohm/fázis, felfogatás 31 mm, 6 kivezetés 4000Ft
3. Epson EM-93 unipoláris motor, 10 Ohm/fázis, felfogatás 31 mm, 6 kivezetés 3000Ft
Minegyik motor 1.8 fok/lépés felbontású.


 http://members.chello.hu/zoltan.makra/hiv/2-2.jpg
http://members.chello.hu/zoltan.makra/hiv/2-2.jpg

1. IBM unipoláris motor, 35 Ohm/fázis, felfogatás 47mm, tengely 6.35mm, 6 kivezetés 5000FT
2. Astrosyn unipoláris motor, 10 Ohm/fázis, felfogatás 31 mm, 6 kivezetés 4000Ft
3. Epson EM-93 unipoláris motor, 10 Ohm/fázis, felfogatás 31 mm, 6 kivezetés 3000Ft
Minegyik motor 1.8 fok/lépés felbontású.
http://members.chello.hu/zoltan.makra/hiv/2-2.jpg
Cím: Re:Léptetőmotor
Írta: yuagaci9g Dátum 2005 április 21, 17:17
Írta: yuagaci9g Dátum 2005 április 21, 17:17
Nem ajanlom senkinek, hogy csupan kivancsisagbol szetszedjen egy leptetomotort!
Sajat tapasztalatomat mondom el;
A keptarban az A3 gravirozo motorjairol van szo.
Bontasbol jutottam hozzajuk, de sajna az egyknek tobol levagtak a kivezeteseit.
Sebaj, gondoltam, egy ekkora cegnel semmi gond,majd kap ujakat.
A motor oldalan figyelmeztetes volt olvashato, miszerint ne szedd szet,mert romlanak a parameterei.
Javitas utan a motor mar uresen, kezzel forgatva is erezhetoen gyengebb volt mint az ikertesvere, amit nem szedtem szet. Most ez hajtja az Y tengelyt, es hamarabb lefullad, mint az azonos beallitassal mukodo X motor, pedig azon joval nagyobb a terheles.
Vajon mi ennek a magyarazata? Otlet?
Sajat tapasztalatomat mondom el;
A keptarban az A3 gravirozo motorjairol van szo.
Bontasbol jutottam hozzajuk, de sajna az egyknek tobol levagtak a kivezeteseit.
Sebaj, gondoltam, egy ekkora cegnel semmi gond,majd kap ujakat.
A motor oldalan figyelmeztetes volt olvashato, miszerint ne szedd szet,mert romlanak a parameterei.
Javitas utan a motor mar uresen, kezzel forgatva is erezhetoen gyengebb volt mint az ikertesvere, amit nem szedtem szet. Most ez hajtja az Y tengelyt, es hamarabb lefullad, mint az azonos beallitassal mukodo X motor, pedig azon joval nagyobb a terheles.
Vajon mi ennek a magyarazata? Otlet?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 21, 17:24
Írta: 000000000 Dátum 2005 április 21, 17:24
A régi munkehelyemen az "öreg" szakik mikor szédszedtek egy állandó mágneses motort egyből kersztbe rátettek a mágnesére két villáskulcsot. Én kérdeztem miért? Azt válszolták, hogy az állandó mágnes veszít az erejéből ha nyitvahaggyák az erővonalakat. Ekkor még csak "okosan" bólogattam de nem igazán hittem nekik. Pedik ezek szerint igazuk lehetet...
Cím: Re:Léptetőmotor
Írta: j3rx6bsjd Dátum 2005 április 21, 19:16
Írta: j3rx6bsjd Dátum 2005 április 21, 19:16
Köszi az infot mindenkinek,megpróbálom valahogy leszedni a hátsó pajzsot,talán ha nem húzom ki a forgórészt a helyéről nem lesz baj.
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2005 április 21, 20:09
Írta: Kristály Árpád Dátum 2005 április 21, 20:09
Hallihó mindenkinek!
Uraim aki már szétszedett léptető motort az tudja, hogy igen nehéz jól összerakni, sőt én úgy gondolom célszerszám nélkül igen nehéz a központba visszaállítani, azért fel a fejjel!
Én egy selejt vagy nemkárérte darabbal kezdeném a szétszedést!
Sok sikert!
Légyszíves számolj be a tapasztalataidból, az infóból biztos tanulunk, mert:
"a jó pap is holtig tanul"
Hallihó mindenkinek
Uraim aki már szétszedett léptető motort az tudja, hogy igen nehéz jól összerakni, sőt én úgy gondolom célszerszám nélkül igen nehéz a központba visszaállítani, azért fel a fejjel!
Én egy selejt vagy nemkárérte darabbal kezdeném a szétszedést!
Sok sikert!
Légyszíves számolj be a tapasztalataidból, az infóból biztos tanulunk, mert:
"a jó pap is holtig tanul"
Hallihó mindenkinek
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 22, 00:44
Írta: 000000000 Dátum 2005 április 22, 00:44
Részben igaz István munkahelyén lévő öreg szakik állítása is, ezt még 10-en éves koromban ismertem fel, amikor szétszedtem egy mosógépmotort. :) Szétszerelés után nem indult el többet, csak búgott.
Bizonyára mindenki elött ismert a felmágnesezés folyamata, illetve az ehhez kapcsolódó demagnetizálás. Nos amikor kiszeditek a léptetőmotor forgórészét, az abban lévő állandó mágnes párhuzamos irányban elhalad a motor állórészének vasmagja elött. Ennek eredményeként, maga az állórész is rendelkezni fog egy mágneses mezővel. A motort újra összerakva taszítás fog fellépni a motorban, az azonos pólusok miatt. A taszítás pedig azt eredményezi, hogy alaphelyzetben könnyebb forgatni a motort. Továbbá a gerjesztett vasmagban lévő mágnesesség rontja a gerjesztés hatásfokát. Megoldást jelenthet a váltóáramról történő gerjesztés, amivel többé-kevésbé helyreállítható az alapállapot... ez a folyamat a demagnetizálás (magnófejeknél is alkalmazzák).
Lakatos: elég leszedned a borítólemezt, és már látod is a tekercset. Ha nem húzod ki a forgórészt, nem lesz gond. Az újabb motorok pedig maguktól beállnak a helyükre, csak szép sorba húzd be a csavarokat... egyszerre mindég csak kicsit húzva az egyes csavarokon.
Bizonyára mindenki elött ismert a felmágnesezés folyamata, illetve az ehhez kapcsolódó demagnetizálás. Nos amikor kiszeditek a léptetőmotor forgórészét, az abban lévő állandó mágnes párhuzamos irányban elhalad a motor állórészének vasmagja elött. Ennek eredményeként, maga az állórész is rendelkezni fog egy mágneses mezővel. A motort újra összerakva taszítás fog fellépni a motorban, az azonos pólusok miatt. A taszítás pedig azt eredményezi, hogy alaphelyzetben könnyebb forgatni a motort. Továbbá a gerjesztett vasmagban lévő mágnesesség rontja a gerjesztés hatásfokát. Megoldást jelenthet a váltóáramról történő gerjesztés, amivel többé-kevésbé helyreállítható az alapállapot... ez a folyamat a demagnetizálás (magnófejeknél is alkalmazzák).
Lakatos: elég leszedned a borítólemezt, és már látod is a tekercset. Ha nem húzod ki a forgórészt, nem lesz gond. Az újabb motorok pedig maguktól beállnak a helyükre, csak szép sorba húzd be a csavarokat... egyszerre mindég csak kicsit húzva az egyes csavarokon.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 22, 07:43
Írta: 000000000 Dátum 2005 április 22, 07:43
Valóban kockázatos a léptetőmotort szétszedni, de leejteni sem érdemes, vajon miért?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 22, 11:21
Írta: 000000000 Dátum 2005 április 22, 11:21
Hali!
A téma nagyon érdekes, ami engem is érdekel.
Szerintem a motorok mind szétszethetö és nem 1-et
már szétszedtem és raktam össze. Persze vannak trükkök az (szétszerelésnél)összerakásnál!! Régi gépiparis tanulmányaim során 3 féle vas van.
1. Tengely nem mágnéses
2. Az állórész magnesezhető
3. Forgórész állandómágnes
Ez szétszerelési tapasztalatom is. Ami ÁRÁT illeti a motoroknak az pontosan a vas speciális értéke. Szerintem. És szerintetek egy menetzárlatos motort ki kell (kb.30.e Ft) dobni? (
A téma nagyon érdekes, ami engem is érdekel.
Szerintem a motorok mind szétszethetö és nem 1-et
már szétszedtem és raktam össze. Persze vannak trükkök az (szétszerelésnél)összerakásnál!! Régi gépiparis tanulmányaim során 3 féle vas van.
1. Tengely nem mágnéses
2. Az állórész magnesezhető
3. Forgórész állandómágnes
Ez szétszerelési tapasztalatom is. Ami ÁRÁT illeti a motoroknak az pontosan a vas speciális értéke. Szerintem. És szerintetek egy menetzárlatos motort ki kell (kb.30.e Ft) dobni? (
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 22, 11:23
Írta: 000000000 Dátum 2005 április 22, 11:23
én már jártam úgy,hogy leejtettem léptetőmotort és utána kuka....a forgó részen található porkohászati úton előállított mágneses anyag elég lágy...ha lepattan belőle egy kis darab az még csak hagyján, de ha elreped kettőbe, esetleg több darabba, akkor értelem szerűen az egy mágnesből már 2-3 lesz
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 22, 11:28
Írta: 000000000 Dátum 2005 április 22, 11:28
Ez igaz, hogy eltört! De nem azért mert lágy, hanem rideg és az nem ugyan az.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 22, 11:44
Írta: 000000000 Dátum 2005 április 22, 11:44
igaz!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 22, 12:02
Írta: 000000000 Dátum 2005 április 22, 12:02
Gege!
Jó- jó, ha eltörik a mágnes az baj, de én nem erre gongoltam.
A helyes megfejtő kap egy leejtett léptetőmotort
[#nyes]
Jó- jó, ha eltörik a mágnes az baj, de én nem erre gongoltam.
A helyes megfejtő kap egy leejtett léptetőmotort
[#nyes]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 22, 12:11
Írta: 000000000 Dátum 2005 április 22, 12:11
Én már láttam olyat, hogy egy komolyabb motor adatlapján rajta van a maximális gyorsulás (és lassítás) amit ki kell bírnia. Valahogy szállítani is kell az árut (pakolás, dobálás, rázkódásnak ki van téve ilyenkor is). Felette persze károsodhat, dehogy a vastest, csapágyazás vagy a forgórész, azt nem tudom.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 22, 12:22
Írta: 000000000 Dátum 2005 április 22, 12:22
motyoros!
Lehet, hogy velem van a baj!!, de nem értem a kérdésedet.
Lehet, hogy velem van a baj!!, de nem értem a kérdésedet.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 22, 13:40
Írta: 000000000 Dátum 2005 április 22, 13:40
Szia!
A motor tengelye visszintesen mozog könnyen?
A motor tengelye visszintesen mozog könnyen?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 22, 18:12
Írta: 000000000 Dátum 2005 április 22, 18:12
balkari!
Pedig egyszerű. Én csak azt állítom hogy ha a léptető motort leejted vagy inkább földhöz vágod akkor baja lesz, és nem azért mert elferdűl a tengelye, vagy valamilyen mechanikai sérülést szenved. Egyébként ha nem hiszed vágj egyet vagy inkább többet (mert az egy az nem statisztika) jó erősen földhöz. Ja és lehetőleg új legyen mert azon jobban észleled a változást.
Üdv:motyoros
Pedig egyszerű. Én csak azt állítom hogy ha a léptető motort leejted vagy inkább földhöz vágod akkor baja lesz, és nem azért mert elferdűl a tengelye, vagy valamilyen mechanikai sérülést szenved. Egyébként ha nem hiszed vágj egyet vagy inkább többet (mert az egy az nem statisztika) jó erősen földhöz. Ja és lehetőleg új legyen mert azon jobban észleled a változást.
Üdv:motyoros
Cím: Re:Léptetőmotor
Írta: yuagaci9g Dátum 2005 április 22, 19:06
Írta: yuagaci9g Dátum 2005 április 22, 19:06
Neem, kezzel forgatva erzed a polusokat, hat itt gyengebben erzed, konnyebb forgatni.
Kulonben van olyan magyar gyartmanyu leptetomotorom
(Mehanikai Muvek), amiben nincs allando magnes, ez siman forog meglenditve, de ha megtaplalom, bivalyeros.
Kulonben van olyan magyar gyartmanyu leptetomotorom
(Mehanikai Muvek), amiben nincs allando magnes, ez siman forog meglenditve, de ha megtaplalom, bivalyeros.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 23, 11:37
Írta: 000000000 Dátum 2005 április 23, 11:37
Szia!
Van egy sejtésem, mivel fizikailag nem látom a motort. Ez pedig a következő:
ELKÉPZELHETŐ? HOGY aki levágta szét is szedte!
Hiányozhat egy hullámos acél alátét az alsó capágy és a csapágyház között. A leírt jelenséget
tapasztaltam a börzében szereplő EM-93 as motoron. Alátét nélkülérezni érezni akülömbséget.
A jelenség hasonló a nagyob motornál (23LM-C200-03H). Kipróbáltam!! Elektronikán nem...
Még egy érdekes van olyan motor ahol 2 db alátét van. A forgórész tengelyét vizszintes rugalmasan belehet nyomni a motort alja irányába. Én ezt tapasztaltam.
Üdv
Van egy sejtésem, mivel fizikailag nem látom a motort. Ez pedig a következő:
ELKÉPZELHETŐ? HOGY aki levágta szét is szedte!
Hiányozhat egy hullámos acél alátét az alsó capágy és a csapágyház között. A leírt jelenséget
tapasztaltam a börzében szereplő EM-93 as motoron. Alátét nélkülérezni érezni akülömbséget.
A jelenség hasonló a nagyob motornál (23LM-C200-03H). Kipróbáltam!! Elektronikán nem...
Még egy érdekes van olyan motor ahol 2 db alátét van. A forgórész tengelyét vizszintes rugalmasan belehet nyomni a motort alja irányába. Én ezt tapasztaltam.
Üdv
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 23, 22:33
Írta: 000000000 Dátum 2005 április 23, 22:33
Egyszerűen arról van szó, hogy szétszedéskor megváltoznak a motor mágneses paraméterei. Ez pedig a tengely irányú elmozdulás (szétszedéskor) eredménye, ugyanis az állórész fémrésze felmágneseződik.
Csak egy példa: van egy olyan ötletes kis eszköz, amivel csavarhúzókat lehet felmágnesezni, hogy könnyen lehesen betenni a csavarokat szűk helyekre. Ezzel az eszközel viszont a mágnesességet újra meg lehet szüntetni, ha arra már nincs szükség. A titok pedig abban van, hogy felmágnesezéskor egyenárammal történik a kütyüben lévő tekercs gerjesztése, viszont a mágnesesség megszűntetésekor váltóáramról történik a tekercsgerjesztés. Szóval miért ne lehetne használni ezt az ötletet itt a léptetőmotorok világában?! Magyarul fogalmazva, ha a motor gerjesztés nélkül könnyen fordul (gyengültek a pólusok) váltóárammal kell gerjeszteni a tekercseket, ami úgymond lenullázza a vasmag mágnesességét.
Csak egy példa: van egy olyan ötletes kis eszköz, amivel csavarhúzókat lehet felmágnesezni, hogy könnyen lehesen betenni a csavarokat szűk helyekre. Ezzel az eszközel viszont a mágnesességet újra meg lehet szüntetni, ha arra már nincs szükség. A titok pedig abban van, hogy felmágnesezéskor egyenárammal történik a kütyüben lévő tekercs gerjesztése, viszont a mágnesesség megszűntetésekor váltóáramról történik a tekercsgerjesztés. Szóval miért ne lehetne használni ezt az ötletet itt a léptetőmotorok világában?! Magyarul fogalmazva, ha a motor gerjesztés nélkül könnyen fordul (gyengültek a pólusok) váltóárammal kell gerjeszteni a tekercseket, ami úgymond lenullázza a vasmag mágnesességét.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 24, 00:54
Írta: 000000000 Dátum 2005 április 24, 00:54
Sima valtoaram nem lesz jo szerintem. Csokkeno amplitudoju aram kell. Pl magnoszalagnal a torles allando amplitudoju valtoarammal torteni, de mozgo szalag egyes pontja ahogy tavolodik a fejtol, annal kissebbb a tererosseg. Gondolom motoroknal is hasonloan kell eljarni, tehat a lemagnesezo aram amplitudojat csokkenteni fokozatosan csokkenteni kell.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 24, 06:40
Írta: 000000000 Dátum 2005 április 24, 06:40
Hát nem tudom, lehet hogy szétszedésnél felmágneseződik az állórész valami minimális mértékben, (összerakásnál ugyanannyit lemágneseződik) hol van ez az üzem közbeni állapottól, hisz akkor nagyságrendekkel nagyobb gerjesztést kap amihez képest nem oszt nem szoroz az a kis visszamaradó mágnesesség.. Szerintem nem itt kell keresni a motorok legyengülésének okait szét és összeszerelés után.Az állandó mágnes két dolgot nem szeret- olyan mint az ember- ha melegítik vagy ha ütögetik.Ha melegítik lsd Curie hőmérséklet átmenetileg vagy véglegesen elveszti mágnesességét. Weller is úgy fedezte fel a pákáját hogy beleejtette a patkómágnesét a kályhába.Ha a mágnest ütögeted vagy leejted bármilyen hihetetlen akár felére is lecsökken az ereje. Az oka valami olyasmi hogy a mikronnyi mágneses domainek a rendezett állapotból kimozdúlnak sőt kellő lassulásnál úgy is maradnak azaz egy rendezetlenebb állapot jön létre.Ha egy fizikus erre jár biztos jobban megmagyarázza. Szétszedésnél gyakran kézbekerűl a kalapács elég egy határozott ütés a tengelyre és ez végzetes lehet.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 24, 06:51
Írta: 000000000 Dátum 2005 április 24, 06:51
István közel járt a jó válaszhoz az értékesebb motorokra mint irja, fel van tüntetve a kritikus lassulás de valószinű nem a mechanikus károsodásra gondolnak a gyártók.
Igy a helyes válaszért járó leejtett léptetőmotort megtartom[#nyes]
Igy a helyes válaszért járó leejtett léptetőmotort megtartom[#nyes]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 24, 09:53
Írta: 000000000 Dátum 2005 április 24, 09:53
Ha a példa a melegedésröl igaz akkor a gépekben használt motorok cseréjét panaszolná nagyon sok társunk. Ráadásul ezek a motorok nem gyári paraméterekkel üzemelnek. Picit morbid dolognak tartom magát a kalapácsot. (Még vicnek). Komolyra fordítva a szót ,ha már "hobbi"-ról beszélünk, de mégis szakmunkát végzünk! Ami itt több szakmát testesít.
Gépipar,Elektotechnika,Számítástechnika.
Azért mertem venni a bátorságot hogy nem csak szemlélő ha nem partner is szeretnék lenni és partnert szeretnék találni!
Elvégeztem egy gépipari-szakközépiskolát,tanultam és dolgoztam 13 évet mint RTV-müszerész, ebböl technikusi végzetséget is szereztem. Most 15 éve számítástecnikában dolgozom és a hardwerrel foglalkozom. Felsőfokú képesítést szereztem, tehát nem barkácsoló vagyok. Hogy ezt miért írom mind ezt le? Mert úgy érzem ,hogy szakmai leírások (könyvek,jegyzetek,puklikációk) nélkül csak ügyefogyot okoskodás azegész. Hamár Mach2 szotver szükséges magyarul miért nem kéne erről a szakterületről is.
Pl. sikerült megvennem egy régebbi könyvet nem is olyan drágán (350 Ft) melynek cime:
Barabás M-Karsai T. Villamos Forgógépek tekercselése. Azt is tapasztaltam, hogy vannak műegyetemi jegyzetek amik igen csak érdekesek ebbe a témába. Sajnos az én időm is véges , úgy éreztem mindesz témával kapcsolatban meg kellett említenem. De most már vár a házkörüli munka.
Üdv mindenkinek.
Gépipar,Elektotechnika,Számítástechnika.
Azért mertem venni a bátorságot hogy nem csak szemlélő ha nem partner is szeretnék lenni és partnert szeretnék találni!
Elvégeztem egy gépipari-szakközépiskolát,tanultam és dolgoztam 13 évet mint RTV-müszerész, ebböl technikusi végzetséget is szereztem. Most 15 éve számítástecnikában dolgozom és a hardwerrel foglalkozom. Felsőfokú képesítést szereztem, tehát nem barkácsoló vagyok. Hogy ezt miért írom mind ezt le? Mert úgy érzem ,hogy szakmai leírások (könyvek,jegyzetek,puklikációk) nélkül csak ügyefogyot okoskodás azegész. Hamár Mach2 szotver szükséges magyarul miért nem kéne erről a szakterületről is.
Pl. sikerült megvennem egy régebbi könyvet nem is olyan drágán (350 Ft) melynek cime:
Barabás M-Karsai T. Villamos Forgógépek tekercselése. Azt is tapasztaltam, hogy vannak műegyetemi jegyzetek amik igen csak érdekesek ebbe a témába. Sajnos az én időm is véges , úgy éreztem mindesz témával kapcsolatban meg kellett említenem. De most már vár a házkörüli munka.
Üdv mindenkinek.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 24, 11:32
Írta: 000000000 Dátum 2005 április 24, 11:32
Balkari!
Tényleg hidd el nagyon sajnálom ha megsértettelek, ha valami akkor ez nagyon távol állt tőlem. Csak erre a két érdekes jelenségre próbáltam felhívni a figyelmet. A melegedés mint veszélyforrás nem jöhet számításba hisz ez csak több száz fokon jelentkezik pl a forrasztópáka mágnese 350-430 C fokon veszti el a mágnesességét és nem is megmaradóan. De én már például melegítettem egy motor tengelyét amiről a fogaskereket így célszerű leszedni de kellő óvatossággal eljárva ez nem okoz gondot.A gyárban is melegen teszik rá így szorul össze a kettő igazán. A fogaskerék 0.05mm rel minuszos a tengelyhez képest
Ami a véletlen leejtést illeti az is előfordulhat. Én nem akarok túl okosnak látszani elsőre én sem hittem el, és végeztem egy kisérletet amihez csak egy rugós erőmérő kell.
A kiszerelt mágneses forgórészt kb 20 cm ről egy vaslaphoz vágva nem tulzott erővel a mágnesessége felére csökkent.
Üdv : motyoros
Tényleg hidd el nagyon sajnálom ha megsértettelek, ha valami akkor ez nagyon távol állt tőlem. Csak erre a két érdekes jelenségre próbáltam felhívni a figyelmet. A melegedés mint veszélyforrás nem jöhet számításba hisz ez csak több száz fokon jelentkezik pl a forrasztópáka mágnese 350-430 C fokon veszti el a mágnesességét és nem is megmaradóan. De én már például melegítettem egy motor tengelyét amiről a fogaskereket így célszerű leszedni de kellő óvatossággal eljárva ez nem okoz gondot.A gyárban is melegen teszik rá így szorul össze a kettő igazán. A fogaskerék 0.05mm rel minuszos a tengelyhez képest
Ami a véletlen leejtést illeti az is előfordulhat. Én nem akarok túl okosnak látszani elsőre én sem hittem el, és végeztem egy kisérletet amihez csak egy rugós erőmérő kell.
A kiszerelt mágneses forgórészt kb 20 cm ről egy vaslaphoz vágva nem tulzott erővel a mágnesessége felére csökkent.
Üdv : motyoros
Cím: Re:Léptetőmotor
Írta: 6dvb4peg3 Dátum 2005 április 24, 16:40
Írta: 6dvb4peg3 Dátum 2005 április 24, 16:40
Üdv mindenkinek!
Többnyire csendes szemlélő vagyok gépítés előtt-közben, és lenne a tapasztalt urakhoz kérdésem:
Milyen szempontok szerint választotok léptetőmotort? itt elsősorban a motor nyomatékára gondolok, hogyan számítjátok ki milyen teljesítményigénye van a mechanikának + a működés közben fellépő erők..? A fogsz egy kézreesőt felszereled, kipróbálod, nem jó veszel újat stb. kicsit költségesnek tűnik.
Előre is köszi Machszi
Többnyire csendes szemlélő vagyok gépítés előtt-közben, és lenne a tapasztalt urakhoz kérdésem:
Milyen szempontok szerint választotok léptetőmotort? itt elsősorban a motor nyomatékára gondolok, hogyan számítjátok ki milyen teljesítményigénye van a mechanikának + a működés közben fellépő erők..? A fogsz egy kézreesőt felszereled, kipróbálod, nem jó veszel újat stb. kicsit költségesnek tűnik.
Előre is köszi Machszi
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 24, 17:41
Írta: 000000000 Dátum 2005 április 24, 17:41
Hali!
En a fogok egy kezreesos modszert valasztottam. Joval olcsobb mint boltban venni egy zsir uj motort. Egyik kiallitason beszeltem a bibus.hu egyik kepviselojevel leptetomotor ugyben. Kerdeztem, hogy szerinte milyen motor kellene, csak ugy sacc per kb. Raerzesre azt mondta, hogy szerinte 1Nm -es motor kellene. Egy ilyen motor kb 20eFt korul van(pofatlanul sokba kerul). Megjegyzem en 4eFt ert vettem ket darab hasznalt leptetomotort, egyenkent 12,5W-osak.
Ha megint motort kellene vennem akkor az alabbiakat vennem figyelembe. (ez most kicsit altalanos lesz)
-3db azonos tipusu motor legyen, mert egyszerubb szerelni es a vezerlot sem bonyolitja tul
-legalabb 12,5W-osak.
-minel kisebb legyen a tekercs ohmos ellenallasa
-szivem szerint bipolarisat vennek, de sajnos most csak unipolaris motorhoz van vezerlom. (draga az az L297+L298 pedig van benne eleve chopper uzemmod!!!)
Picit visszaterve a bibus.hu altal adott arakra. Nagyjabol 20eFt/db egy 1Nm-es motor, pontos arra nem emlekszem. Kinyitottam az elfa katalogust. 1Nm-es bipolaris leptetomotor 47EUR. Uj motor vasarlasa nem igazan celszeru szerintem (az ara miatt), de elonyos mert biztosan van utanpotlas.
Hasznalt/bontott motor vasarlasa celszerubb mert olcsobb, de nem biztos hogy talalunk kesobb is hasonlokat.
En a fogok egy kezreesos modszert valasztottam. Joval olcsobb mint boltban venni egy zsir uj motort. Egyik kiallitason beszeltem a bibus.hu egyik kepviselojevel leptetomotor ugyben. Kerdeztem, hogy szerinte milyen motor kellene, csak ugy sacc per kb. Raerzesre azt mondta, hogy szerinte 1Nm -es motor kellene. Egy ilyen motor kb 20eFt korul van(pofatlanul sokba kerul). Megjegyzem en 4eFt ert vettem ket darab hasznalt leptetomotort, egyenkent 12,5W-osak.
Ha megint motort kellene vennem akkor az alabbiakat vennem figyelembe. (ez most kicsit altalanos lesz)
-3db azonos tipusu motor legyen, mert egyszerubb szerelni es a vezerlot sem bonyolitja tul
-legalabb 12,5W-osak.
-minel kisebb legyen a tekercs ohmos ellenallasa
-szivem szerint bipolarisat vennek, de sajnos most csak unipolaris motorhoz van vezerlom. (draga az az L297+L298 pedig van benne eleve chopper uzemmod!!!)
Picit visszaterve a bibus.hu altal adott arakra. Nagyjabol 20eFt/db egy 1Nm-es motor, pontos arra nem emlekszem. Kinyitottam az elfa katalogust. 1Nm-es bipolaris leptetomotor 47EUR. Uj motor vasarlasa nem igazan celszeru szerintem (az ara miatt), de elonyos mert biztosan van utanpotlas.
Hasznalt/bontott motor vasarlasa celszerubb mert olcsobb, de nem biztos hogy talalunk kesobb is hasonlokat.
Cím: Re:Léptetőmotor
Írta: Bicska Dátum 2005 április 24, 21:03
Írta: Bicska Dátum 2005 április 24, 21:03
Én elöször saccra megvettem a motorokat, majd hosszú és nehéz munka után "beszereltem". Ez után kiderült, hogy nem elég erős. Ez után 5:1-es áttételt készítettem mind a 3 tengelyhez, ami nem kevés pénzbe került,-->így sem volt jó. Na ez volt a tanulópénz[#violent]. Ezek után nekiálltam értelmesen: megmértem rugós erőmérővel (alias halsúly-mérő), hogy mennyi az ellenállása a szerkezetnek ill. marás közben az anyagnak, majd ennek megfelelően választottam motort. ( a valóságban ez nem így van, mert direktbe mértem 2.8Nm-t, most medig egy 8Nm-es motor fogja hajtani 1:4-es áttétellel, kicsit túlméreteztem)[#wink])
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 24, 21:39
Írta: 000000000 Dátum 2005 április 24, 21:39
Hali!
Epp most talaltam egy oldalt ahol a srac 1,63Nm-es motorral hajtja meg a tengelyet. Az a motor (MAE HS200 2231 0300 BX 08) amit o hasznal kaphato a www.bibus.hu -n. Gondolom 23eFt/db nal kezdodik (ennyi remlik) +fa persze :)
Tud meg valaki pontos nyomatekerteket mondani? Kivancsi vagyok, hogy sacc per kb mekkora nyomateku motor szukseges.
Epp most talaltam egy oldalt ahol a srac 1,63Nm-es motorral hajtja meg a tengelyet. Az a motor (MAE HS200 2231 0300 BX 08) amit o hasznal kaphato a www.bibus.hu -n. Gondolom 23eFt/db nal kezdodik (ennyi remlik) +fa persze :)
Tud meg valaki pontos nyomatekerteket mondani? Kivancsi vagyok, hogy sacc per kb mekkora nyomateku motor szukseges.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 24, 23:50
Írta: 000000000 Dátum 2005 április 24, 23:50
Csak anyit fűznék hozzá az általad leírtakhoz, hogy azok mind szélsőségek, amiknek egy épeszű ember nem tesz ki egy motort (hacsak nem történik valami kis baleset). Példaként: van két azonos motor, az egyiket szétszedtem, a másikat nem. Amelyiket szétszedtem, nem tettem se kemencébe, és kalapácsot sem használtam a szétszerelés során. Vagyis egyik olyan dolog sem történt meg, amit leírtál. A szétszedett motor azonban mégis gyengébb a másiknál.
Magyarázatokat lehet keresni, de szerintem a tanúlság a legnagyobb erénye ennek a témának. Vagyis, ha egy mód van rá senki se kisérletezzen a motorok szétszerelésével, illetve kábelcsere esetén csak a hátsó fedlapot szabad leszedni!
Magyarázatokat lehet keresni, de szerintem a tanúlság a legnagyobb erénye ennek a témának. Vagyis, ha egy mód van rá senki se kisérletezzen a motorok szétszerelésével, illetve kábelcsere esetén csak a hátsó fedlapot szabad leszedni!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 25, 07:08
Írta: 000000000 Dátum 2005 április 25, 07:08
Denkiki!
Teljesen igazad van.
Az én általam felvetettek inkább elvi jelentőségűek, mint érdekességeket mondtam el. Lehet,hogy ezeket nem mindenki ismeri és jó vigyázni.
Például azt hogy az ütődés káros én is csak mostanába tudtam meg- el sem nagyon hittem de a kisérlet meggyőzött. A fizikai magyarázata is érdekes.
Viszont akkor továbbra sem tudjuk mi az oka a legyengülésnek.
Teljesen igazad van.
Az én általam felvetettek inkább elvi jelentőségűek, mint érdekességeket mondtam el. Lehet,hogy ezeket nem mindenki ismeri és jó vigyázni.
Például azt hogy az ütődés káros én is csak mostanába tudtam meg- el sem nagyon hittem de a kisérlet meggyőzött. A fizikai magyarázata is érdekes.
Viszont akkor továbbra sem tudjuk mi az oka a legyengülésnek.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 25, 11:29
Írta: 000000000 Dátum 2005 április 25, 11:29
Sziasztok!
Nézzétek meg.
http://dbudai.fpn.hu/_dwad_/frameset.php?path=http://dbudai.fpn.hu/
Nézzétek meg.
http://dbudai.fpn.hu/_dwad_/frameset.php?path=http://dbudai.fpn.hu/
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 25, 11:54
Írta: 000000000 Dátum 2005 április 25, 11:54
Én megnéztem és csak egy szép farkaskutyát láttam, a többi nem működik.Kbfél éve ígérte a tulaj hogy nagy teljesítményű motorokat fog csinálni, de azóta semmi.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 25, 12:01
Írta: 000000000 Dátum 2005 április 25, 12:01
Lampas: Az nem igazán léptetőmotor, hanem asszinkron motor. Az ilyen motor forgórészében nincs mágnes, hanem egy rövidrezárt tekercselés található. Ezek a motorok nem használhatóak pontos pozicionálásra, mivel nincsenek pozicionáló hornyok. Mindemellett indulási nyomatékuk is meglehetősen kicsi, és nagy a mágneses csúszása is.
Cím: Re:Léptetőmotor
Írta: yuagaci9g Dátum 2005 április 25, 18:28
Írta: yuagaci9g Dátum 2005 április 25, 18:28
A motoron azt irja magyaul, hogy `` Vonoorsos leptetomotor`` Rajz is van mellekelve a gyengebbek kedveert harom fazisu, csillagban.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 25, 20:38
Írta: 000000000 Dátum 2005 április 25, 20:38
Milyen felbontású?
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2005 április 25, 21:21
Írta: Kristály Árpád Dátum 2005 április 25, 21:21
Hallihó mindenkinek!
Miből gondoljátok, hogy az emlitett "dbudai" honlapon lévő motor nem mágne forgórészű. Az Engely könyvében található egy cég cime minden féle formányú mágneseket öntenek, valmilyen speciális módon. Az igaz, hogy amikor dbudai úrat kérdeztem a forgórészről nagy csönd támadt!
Hallihó mindenkinek4
Miből gondoljátok, hogy az emlitett "dbudai" honlapon lévő motor nem mágne forgórészű. Az Engely könyvében található egy cég cime minden féle formányú mágneseket öntenek, valmilyen speciális módon. Az igaz, hogy amikor dbudai úrat kérdeztem a forgórészről nagy csönd támadt!
Hallihó mindenkinek4
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 25, 23:10
Írta: 000000000 Dátum 2005 április 25, 23:10
Nem arról a motorról beszélünk, hanem Lampas egyik elfekvőben lévő asszinkron motorjáról :)
Cím: Re:Léptetőmotor
Írta: 9v9rb6gau Dátum 2005 április 26, 06:26
Írta: 9v9rb6gau Dátum 2005 április 26, 06:26
Denkiki: Egyes mágnesanyagokat, hogy megtartsuk eredeti állapotukban, állandóan kell mágnesesen söntölni, mert, ha a söntölés mértéke lecsökken, tehát, pl:a forgórészt kiszereljük, a mágnes átgrik egy annak megfelelő kisebb energiaszintre. Utána hiába rakjuk vissza az eredeti helyére, a mágnes erőssége már nem lesz az eredeti. Ezért tapasztaltad, hogy a szétszedett motor ereje lecsökkent. Ha valami miatt mégis muszály a motort szétszedni, akkor ferromágneses anyagból (pl:acél) egy vastagfalú csövet kell esztergálni
aminek a belső átmérője kb olyan mint az állórészé. Ezt a csövet az állórész vasához, amennyire csak lehet, közel tartva, ha lehet hozzá érintve át kell tolni bele a forgórészt.
Üdv mindenkinek!
aminek a belső átmérője kb olyan mint az állórészé. Ezt a csövet az állórész vasához, amennyire csak lehet, közel tartva, ha lehet hozzá érintve át kell tolni bele a forgórészt.
Üdv mindenkinek!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 26, 07:09
Írta: 000000000 Dátum 2005 április 26, 07:09
Ez roppant érdekes! Köszönjük az infót!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 26, 12:17
Írta: 000000000 Dátum 2005 április 26, 12:17
Ez a "csőbehúzás" egy nagyon jó ötlet, köszi gépész! Én is elkezdtem gondolkodni valami többlet mágneses energiában, mert a vasmag tényleg nem mágneseződöt fel szétszedéskor. Nade akkor biztos ez az energiaszint esés a probléma. Olysminek tudom elképzelni, hogy szétszedéskor a mágnes erővonalainak tengelytől való távolsága megnő, majd összeszereléskor egy része kinn reked. Nade biztos van rá egy jobban összeszedett fizikai magyarázat. Tied a PONT gépész :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 29, 12:56
Írta: 000000000 Dátum 2005 április 29, 12:56
Sziasztok!
Erről a motorról tud valaki valamilyen infót?
Mekkor a max fesz, meg ilyenek.
http://russian.uw.hu/motor.jpg
Erről a motorról tud valaki valamilyen infót?
Mekkor a max fesz, meg ilyenek.
http://russian.uw.hu/motor.jpg
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 április 29, 21:43
Írta: 000000000 Dátum 2005 április 29, 21:43
Cím: Re:Léptetőmotor
Írta: bicme92us Dátum 2005 május 17, 17:48
Írta: bicme92us Dátum 2005 május 17, 17:48
Üdv!
Infót keresnék a következő motorról:
57SH-52A9R 22.5 ohm 0.9fok/step
9 kivezetéses, 8 különálló tekercs, egyikvég közösítve (bontásból)
előre is köszönöm
Infót keresnék a következő motorról:
57SH-52A9R 22.5 ohm 0.9fok/step
9 kivezetéses, 8 különálló tekercs, egyikvég közösítve (bontásból)
előre is köszönöm
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2005 május 20, 22:38
Írta: Kristály Árpád Dátum 2005 május 20, 22:38
Hallihó mindenkinek!
Aki tud segítsen, egyéb infoval.
Bontásból jutottam az alábbi motorokhoz:
Gamma, 6-volt, 1-A, nyolc kivezetés és ami érdekes négy szál vastagabb vezeték. Typ: Ml5772-200/6U, 1,8-fok/step.
Köszönöm!
Aki tud segítsen, egyéb infoval.
Bontásból jutottam az alábbi motorokhoz:
Gamma, 6-volt, 1-A, nyolc kivezetés és ami érdekes négy szál vastagabb vezeték. Typ: Ml5772-200/6U, 1,8-fok/step.
Köszönöm!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 május 21, 08:21
Írta: 000000000 Dátum 2005 május 21, 08:21
Egy Ohm mérővel a szálak közti összefüggést (Ohm-os értékeket) fel kellene derítened! Hátha rájövünk mi lehet az a két szál.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 május 21, 11:12
Írta: 000000000 Dátum 2005 május 21, 11:12
Hali!
Lehet hogy egyenkent vannak kivezetve a tekrecsek. A vastagabb lehet hogy 2 osszetartozo tekercset jelent. Persze ez csak tipp!
Lehet hogy egyenkent vannak kivezetve a tekrecsek. A vastagabb lehet hogy 2 osszetartozo tekercset jelent. Persze ez csak tipp!
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2005 május 21, 11:16
Írta: Kristály Árpád Dátum 2005 május 21, 11:16
Halihó!
Kösz megprobálom.
Üdv.
Kösz megprobálom.
Üdv.
Cím: Re:Léptetőmotor
Írta: j3rx6bsjd Dátum 2005 május 21, 12:54
Írta: j3rx6bsjd Dátum 2005 május 21, 12:54
Nekem is van egy Gamma léptetőmotorom Typ:ML330/200K
12V/1A
1.8fok/step
8 kivezetése van,az összetartozó tekercsek egy 15ohm-os ellenálláson keresztül sorba vannak kötve,így marad 4 kivezetés.
A szinek párban vannak?
12V/1A
1.8fok/step
8 kivezetése van,az összetartozó tekercsek egy 15ohm-os ellenálláson keresztül sorba vannak kötve,így marad 4 kivezetés.
A szinek párban vannak?
Cím: Re:Léptetőmotor
Írta: j3rx6bsjd Dátum 2005 május 25, 08:26
Írta: j3rx6bsjd Dátum 2005 május 25, 08:26
Sziasztok!
Szerintetek melyik motor erősebb?
Robotron SPA 52/60 12V,2A vagy a Sanyo Denki 5.1V,1A?
Szerintetek melyik motor erősebb?
Robotron SPA 52/60 12V,2A vagy a Sanyo Denki 5.1V,1A?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 május 25, 08:51
Írta: 000000000 Dátum 2005 május 25, 08:51
Nem fox csőbehúzni, a Sanyóra tippelek[#nyes]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 május 25, 11:20
Írta: 000000000 Dátum 2005 május 25, 11:20
Én nem vagyok ebben olyan biztos... Az biztos, hogy a Sanyo nagyobb lépésszámra képes (tehát a felső sebességtartományban nagyobb nyomatékot ad le).
Cím: Re:Léptetőmotor
Írta: j3rx6bsjd Dátum 2005 május 25, 12:50
Írta: j3rx6bsjd Dátum 2005 május 25, 12:50
Ha főleg alumíniumot szeretnék megmunkálni,melyiket érdemes választani?
Nekem a robotron szimpatikus,mert 3-as emelkedésű orsókat fogok használni.És így mm-es osztásnál is egész lépésszámokat kapok.
Mi a véleményetek?
Nekem a robotron szimpatikus,mert 3-as emelkedésű orsókat fogok használni.És így mm-es osztásnál is egész lépésszámokat kapok.
Mi a véleményetek?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 május 25, 18:31
Írta: 000000000 Dátum 2005 május 25, 18:31
Hali Lakatos!
Azt hittem ezt csak egy találóskérdésnek szántad, hogy feldobd ezt a topikot, de ha már ez egy valós kérdés, és nyerni sem lehet semmit akkor szerintem nehéz eldönteni melyik az erősebb csak a feszültég és áram adatokból.Pl egy 2,2 N.m es tartónyomatékkal bíró Oriental Motor által gyártott VEXTRA márkajelű motorra 3.4V 2,8A van ÍRVA, de a mellékelt karakterisztika szerint 24V 3.18A nél 2.5N.m a nyomatéka de csak alacsony fordulaton (100 ford/min -ig) Ugyanez a cég a márkavédelem miatt kijelenti, hogy a 2 évnél öregebb raktáron lévő motorokat bezúzza. Gondolom nem jószántukból és nem is azért mert a csapágyban megöregedett a zsír. A Robotron motorok 16 évnél nem lehetnek fiatalabbak.Persze ettől még kis fogásokra gravírozásra jó lehet a Robotron is. Az SPA 42/100 as Robotron 14N.cm nyomatékú, az 56/60 as sem lehet több kb:0.4 N.m -nél. Egy vadi új 0.7 N.m -es motor 15ezer ft. Jól meg kell gondolni.
Azt hittem ezt csak egy találóskérdésnek szántad, hogy feldobd ezt a topikot, de ha már ez egy valós kérdés, és nyerni sem lehet semmit akkor szerintem nehéz eldönteni melyik az erősebb csak a feszültég és áram adatokból.Pl egy 2,2 N.m es tartónyomatékkal bíró Oriental Motor által gyártott VEXTRA márkajelű motorra 3.4V 2,8A van ÍRVA, de a mellékelt karakterisztika szerint 24V 3.18A nél 2.5N.m a nyomatéka de csak alacsony fordulaton (100 ford/min -ig) Ugyanez a cég a márkavédelem miatt kijelenti, hogy a 2 évnél öregebb raktáron lévő motorokat bezúzza. Gondolom nem jószántukból és nem is azért mert a csapágyban megöregedett a zsír. A Robotron motorok 16 évnél nem lehetnek fiatalabbak.Persze ettől még kis fogásokra gravírozásra jó lehet a Robotron is. Az SPA 42/100 as Robotron 14N.cm nyomatékú, az 56/60 as sem lehet több kb:0.4 N.m -nél. Egy vadi új 0.7 N.m -es motor 15ezer ft. Jól meg kell gondolni.
Cím: Re:Léptetőmotor
Írta: j3rx6bsjd Dátum 2005 május 25, 18:38
Írta: j3rx6bsjd Dátum 2005 május 25, 18:38
István?Neked mi a meglátásod a dologról?Milyen tapasztalataid vannak?
Egy biztos,újjat egyenlőre nem veszek,mert egy másik project nagyon szívja a zsebemet.
Egy biztos,újjat egyenlőre nem veszek,mert egy másik project nagyon szívja a zsebemet.
Cím: Re:Léptetőmotor
Írta: f6kuxbs9f Dátum 2005 május 25, 18:39
Írta: f6kuxbs9f Dátum 2005 május 25, 18:39
Sziasztok!
Én most vettem a német ebay-n új, de két évnél régebben elfeküdt Vexta motort, olyan 1,3 Nm-est. 23 euróba került, bankköltséggel és szállítással együtt sem érte el a 40-et, ami ugye 10 eFt.
Lehet érdekes dolgokat vadászni.
Én most vettem a német ebay-n új, de két évnél régebben elfeküdt Vexta motort, olyan 1,3 Nm-est. 23 euróba került, bankköltséggel és szállítással együtt sem érte el a 40-et, ami ugye 10 eFt.
Lehet érdekes dolgokat vadászni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 május 25, 18:52
Írta: 000000000 Dátum 2005 május 25, 18:52
Köszi az infót, pont valami hasonló kéne nekem is 2drb, megyek körülnézek az ebay-on.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 május 25, 19:15
Írta: 000000000 Dátum 2005 május 25, 19:15
Halál biztos dolgokat nem tudok mondani sajnos, de a tapasztalatom szerint egy SPA52/60-as motor alacsony lépésszám melllett (pl. 100 Step/sec) kb felér egy 1.3V-os 1.1A-es motorral (de ez csak erősen saccolt dolog). Viszont nagyobb lépésszám mellett már a Japán motorok messze verik, és ne felejtsük el a Japán 1.8°-os (vagy 0.9°)!
Nem lehet közvetlen összefüggést meg állapítani a feszültség×áram és a leadott nyomatékok között! Nagyon, de nagyon típusfüggő!
Nem lehet közvetlen összefüggést meg állapítani a feszültség×áram és a leadott nyomatékok között! Nagyon, de nagyon típusfüggő!
Cím: Re:Léptetőmotor
Írta: j3rx6bsjd Dátum 2005 május 25, 19:17
Írta: j3rx6bsjd Dátum 2005 május 25, 19:17
Azt tényleg sikerült kifognod!
Én az encodereket vettem onnan,4db-ot 9000Ft-ért
Zsír új 360 imp/ford.Majd szétnézek lehet,hogy szánok rá egy kis pénzt és veszek újjat.
Én az encodereket vettem onnan,4db-ot 9000Ft-ért
Zsír új 360 imp/ford.Majd szétnézek lehet,hogy szánok rá egy kis pénzt és veszek újjat.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 május 25, 19:29
Írta: 000000000 Dátum 2005 május 25, 19:29
Mindíg vitatéma az, hogy egy adott motor milyen erős mekkora a nyomatéka, ezt a felirata alapján nehéz megítélni, főleg ha már adatlap sincs róla. Mostanába több gyártó prospektusait böngészgettem és észrevettem egy összefüggést. Mintha a súly és a N.m között egyenlőség állna fent. Az 1 kgr tömegű motorok javarészt 1 N.m- körül vannak. Persze ehez nem kell sok ész-- a nagyobb nehezebb motorok erősebbek. De saccoláshoz ez jó talán elég is. Ezek szerint az 5.1 VA -es sanyó denki hasonló nyomatékú mint a robotron, mindkettő 1/2 kg. Na most lehet röhögni!
Cím: Re:Léptetőmotor
Írta: j3rx6bsjd Dátum 2005 május 25, 19:41
Írta: j3rx6bsjd Dátum 2005 május 25, 19:41
Saccoláshoz ennyi tényleg elég,de amikor választani kell,akkor nem olyan egyszerű a kérdés.Én igazából tapasztalatok után érdeklődöm,nem kimondottan számszerű adatra.
Ha esetleg volna valaki aki már mind a kétfajtát letesztelte,megírhatná az észrevételeit.
Sok görcsölést és méricskélést megspórolnék.
Ha esetleg volna valaki aki már mind a kétfajtát letesztelte,megírhatná az észrevételeit.
Sok görcsölést és méricskélést megspórolnék.
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2005 május 25, 21:56
Írta: Kristály Árpád Dátum 2005 május 25, 21:56
Hallihó mindenkinek!
Igen, szerintem nyilvánvaló, hogy a tömegnek is van összefügése. Én azt tapasztaltam, hogy kb. két egyforma elektromos paraméretü motorok között nagy szerepe van a motor hasznos vasmag szélességnek, mert ennek nagyobb a nyomatéka pl.: Vexta motoroknál tapasztaltam.
Hallihó!
Igen, szerintem nyilvánvaló, hogy a tömegnek is van összefügése. Én azt tapasztaltam, hogy kb. két egyforma elektromos paraméretü motorok között nagy szerepe van a motor hasznos vasmag szélességnek, mert ennek nagyobb a nyomatéka pl.: Vexta motoroknál tapasztaltam.
Hallihó!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 május 26, 06:47
Írta: 000000000 Dátum 2005 május 26, 06:47
Ezt csak én is megerősíteni tudom! Nálam eléggé sok féle motor megfordult és én is megállapítottam, hogy a vasmag "hasznos" hossza (az-az a pólushosz) alapjában minősíti a motort! Minnél hosszab annál erősebb. De ez igaz az armatúra átmérőjére is. Teljesen azonos villamos paraméterű (áram, feszültség) motorok között is vannak kicsi és viszonylag óriási méretüek, és egyértelmü volt, hogy a nagyobb erősebb is!
Cím: Re:Léptetőmotor
Írta: j3rx6bsjd Dátum 2005 május 26, 08:02
Írta: j3rx6bsjd Dátum 2005 május 26, 08:02
Akkor tehát érdemesebb a japán motort választani?
A japán motornak nagyobb a lépésszáma,de az egy lépésre jutó elmozdulása így kisebb,ha ugyanazt a mechanikát alkalmazom a japán motor erősebb az egyformán megemelt,magasabb fordulaton?
Bocs,ha kreténnek tünök,de már nem tudom jobban körülírni,hogy mit akarok kérdezni.
A japán motornak nagyobb a lépésszáma,de az egy lépésre jutó elmozdulása így kisebb,ha ugyanazt a mechanikát alkalmazom a japán motor erősebb az egyformán megemelt,magasabb fordulaton?
Bocs,ha kreténnek tünök,de már nem tudom jobban körülírni,hogy mit akarok kérdezni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 május 26, 08:40
Írta: 000000000 Dátum 2005 május 26, 08:40
Azt hiszem értem mit akarsz kérdezni [#rolleyes] és a válasz igen.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 május 26, 09:36
Írta: 000000000 Dátum 2005 május 26, 09:36
Csak egy tapasztalat az alu maráshoz: Gyári gép, x-y tengelyen kb 2.5x akkora geometriai méretű motorokkal mint a robotron ill. a sanyó, 4mm-es kétélű szármaróval 0.1..0.2mm fogásmélységgel gyönyörűen dolgozik, 0.3 feletti mélységnél elkezd rezonálni, a motorok még lépést nem veszítenek de a felület már nem megfelelő. Kis motoroknál ez a rezonancia valószinű hamarabb bekövetkezik.
Cím: Re:Léptetőmotor
Írta: j3rx6bsjd Dátum 2005 május 26, 12:55
Írta: j3rx6bsjd Dátum 2005 május 26, 12:55
Nem akarok kötekedni,de szerintem ez inkább megmunkálási próblémából ered.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 május 26, 12:59
Írta: 000000000 Dátum 2005 május 26, 12:59
Mire gondolsz ?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 május 29, 11:13
Írta: 000000000 Dátum 2005 május 29, 11:13
Na ezt mondja meg valaki!A motor az egyik forgásirányba simán fut, a másik irányba zörög nem fut rendesen,terhelés nélkül,de terhelve is.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 május 29, 11:15
Írta: 000000000 Dátum 2005 május 29, 11:15
Inkább a marótengely merevségével van probléma, egy külön precizen csapágyazott marótengelyre lenne szükség.
Cím: Re:Léptetőmotor
Írta: knifemaster Dátum 2005 május 29, 13:23
Írta: knifemaster Dátum 2005 május 29, 13:23
Lehet a gond a
túl hosszan kilógatott marószár is,a maró átmérőjéhez képest
kopott,kipattant élszalag
nagy előtolás,mert nyomja keni az anyagot..(vagy karcolja?)
túl hosszan kilógatott marószár is,a maró átmérőjéhez képest
kopott,kipattant élszalag
nagy előtolás,mert nyomja keni az anyagot..(vagy karcolja?)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 május 29, 19:27
Írta: 000000000 Dátum 2005 május 29, 19:27
Ellenőrizd a fázisbekötéseket és ha van lehetőséged cseréj motort! Csak egy motor viselkedik így?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 május 31, 11:45
Írta: 000000000 Dátum 2005 május 31, 11:45
Sziasztok!
Meg nagyon kezdo vagyok a temaban, egy kis segitseget szeretnek kerni!
A lepteto motorok szukseges teljesitmenyet hogyan tudom megsaccolni, ha ismerek a mozgatni kivant sulyok nagysagat? (Kocsik sulya, munkadarab sulya)
Nem tudom, hogy mekkora motorra lenne szuksegem.
Meg nagyon kezdo vagyok a temaban, egy kis segitseget szeretnek kerni!
A lepteto motorok szukseges teljesitmenyet hogyan tudom megsaccolni, ha ismerek a mozgatni kivant sulyok nagysagat? (Kocsik sulya, munkadarab sulya)
Nem tudom, hogy mekkora motorra lenne szuksegem.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 május 31, 20:13
Írta: 000000000 Dátum 2005 május 31, 20:13
Hali!
A minap epp a kesleltetett utolso lepes modszeren gondolkoztam. Aki nem ismerne ezt a technikat annak rovden osszefoglalom, hogy mit jelent. Arrol szol a dolog, hogy a leptetomotor utolso lepesenel a rendszer csillapitott lengessel all meg. Ennek oka az hogy a mozgatott targy (tengely, orso, akarmi) rendelkezik bizonyos mozgasi engergiaval amit valahogy meg kell szuntetni. Amint a motor megtette a lepest a tengely fordulna tovabb. Ez ellen hat a motor. Bizonyos eseteknel elofordulhat , hogy lepestevesztes lep fel. Pl tullendul.
Mit lehet ez ellen tenni? Ket dolgot olvastam. Egyik ez a kesleltetett lepes modszere. Lenyege, hogy az utolso elotti lepesnel kis ideig nem lepunk. Elmeletileg a tengely ekkor ebben a pozicioban allna meg, csillapitot lengessel. Nyilvanvalo, hogy az utlso elotti lepes utan a tengely kiterese hamarosan eler egy pozitiv maximumot. Ez az a pillanatt amikor a lepesvesztes tortent. Ilyenkor ha kiadjuk az utolso lepesimpulzust akkor a tegely megmarad ebben a pozicioban es lenges nelkul all meg.
Masik dolog amit olvastam pedig az uzzemmod valtoztatas. Tegyuk fel, hogy bipolaris vezerlest hasznalunk. Ha a fekezes idejere atkapcsolnank unipolaris vezerlesre akkor lehetoseg nyilna kihasznalni ennek a vezerlesnek azt az elonyet, hogy bizonyos tekercsek rovidrezarasaval fekezest hozzunk letre. Ez a fekezes elonyosen valtoztatja meg a fekezes es leallas idobeni lefutasat.
Azt hiszem az elso megoldas nem sokmindenkit erinthet. Ennek foleg akkor lehet haszna ha a mozgatott tengely parameterei fix-ek. Ez pedig a mi esetunkben akkor all fent ha a megmunkalo szerszamot mozgatjuk mind a 3 tengely menten, es a munkadarab fix helyet foglal el.
De nezzuk meg a masodik lehetoseget. Vajon hogyan lehet megvalositani egy olyan vezerlest amivel unipolarisrol bipolarisra lehet atkapcsolni? Az alabbi 5letem tamadt. Bipolaris vezerles eseten 1-1 tekercs van H hidba kapcsolva. Lenyegeben arrol van szo, hogy a unipolarissal ellentetben nem fel tekercsek vannak aram allatt hanem teljes tekercsek. A tekercsek magnesesen sorba vannak kapcsolva. Ezt ugy is elerhetem ha minden egyes feltekercset H hidba kotok. (1motor=4*4 azaz 16 FET). Ezzel a megoldassal lehetoseg van ra, hogy unipolaris uzemben uzemeljen a motor. Tulajdonkeppen csak vezerleskerdese. Sot, lehetoseg van a tekercsek rovidrezarasara is!
Remelem nem zavartam senkit az eszmefutatassal. Gondoltam megirom hatha valakit erdekel.
A minap epp a kesleltetett utolso lepes modszeren gondolkoztam. Aki nem ismerne ezt a technikat annak rovden osszefoglalom, hogy mit jelent. Arrol szol a dolog, hogy a leptetomotor utolso lepesenel a rendszer csillapitott lengessel all meg. Ennek oka az hogy a mozgatott targy (tengely, orso, akarmi) rendelkezik bizonyos mozgasi engergiaval amit valahogy meg kell szuntetni. Amint a motor megtette a lepest a tengely fordulna tovabb. Ez ellen hat a motor. Bizonyos eseteknel elofordulhat , hogy lepestevesztes lep fel. Pl tullendul.
Mit lehet ez ellen tenni? Ket dolgot olvastam. Egyik ez a kesleltetett lepes modszere. Lenyege, hogy az utolso elotti lepesnel kis ideig nem lepunk. Elmeletileg a tengely ekkor ebben a pozicioban allna meg, csillapitot lengessel. Nyilvanvalo, hogy az utlso elotti lepes utan a tengely kiterese hamarosan eler egy pozitiv maximumot. Ez az a pillanatt amikor a lepesvesztes tortent. Ilyenkor ha kiadjuk az utolso lepesimpulzust akkor a tegely megmarad ebben a pozicioban es lenges nelkul all meg.
Masik dolog amit olvastam pedig az uzzemmod valtoztatas. Tegyuk fel, hogy bipolaris vezerlest hasznalunk. Ha a fekezes idejere atkapcsolnank unipolaris vezerlesre akkor lehetoseg nyilna kihasznalni ennek a vezerlesnek azt az elonyet, hogy bizonyos tekercsek rovidrezarasaval fekezest hozzunk letre. Ez a fekezes elonyosen valtoztatja meg a fekezes es leallas idobeni lefutasat.
Azt hiszem az elso megoldas nem sokmindenkit erinthet. Ennek foleg akkor lehet haszna ha a mozgatott tengely parameterei fix-ek. Ez pedig a mi esetunkben akkor all fent ha a megmunkalo szerszamot mozgatjuk mind a 3 tengely menten, es a munkadarab fix helyet foglal el.
De nezzuk meg a masodik lehetoseget. Vajon hogyan lehet megvalositani egy olyan vezerlest amivel unipolarisrol bipolarisra lehet atkapcsolni? Az alabbi 5letem tamadt. Bipolaris vezerles eseten 1-1 tekercs van H hidba kapcsolva. Lenyegeben arrol van szo, hogy a unipolarissal ellentetben nem fel tekercsek vannak aram allatt hanem teljes tekercsek. A tekercsek magnesesen sorba vannak kapcsolva. Ezt ugy is elerhetem ha minden egyes feltekercset H hidba kotok. (1motor=4*4 azaz 16 FET). Ezzel a megoldassal lehetoseg van ra, hogy unipolaris uzemben uzemeljen a motor. Tulajdonkeppen csak vezerleskerdese. Sot, lehetoseg van a tekercsek rovidrezarasara is!
Remelem nem zavartam senkit az eszmefutatassal. Gondoltam megirom hatha valakit erdekel.
Cím: Re:Léptetőmotor
Írta: f6kuxbs9f Dátum 2005 június 01, 09:31
Írta: f6kuxbs9f Dátum 2005 június 01, 09:31
Sziasztok!
Az Altalad vazolt megoldas mukodhet is, csak minek :-)
Ha mar van egy bipolaris vezerlesed, miert vezerelned a motort unipolarisan? Megnezegetve nehany leptetomotor adatlapot, azt fogod latni, hogy ugyanaz a motor, altalaban nagyobb nyomateku bipolarisan vezerelve, mint unipolarisan. Az unipolaris vezerles elsosorban egyszerubb es olcsobb kivitelezese miatt nepszeru hobbycnc-s vezerleskent. Bipolaris vezerlesnel mar nem celszeru eltekinteni a speci hidmeghajto ic-ktol, amiket eleg dragan adnak.
Udv
Az Altalad vazolt megoldas mukodhet is, csak minek :-)
Ha mar van egy bipolaris vezerlesed, miert vezerelned a motort unipolarisan? Megnezegetve nehany leptetomotor adatlapot, azt fogod latni, hogy ugyanaz a motor, altalaban nagyobb nyomateku bipolarisan vezerelve, mint unipolarisan. Az unipolaris vezerles elsosorban egyszerubb es olcsobb kivitelezese miatt nepszeru hobbycnc-s vezerleskent. Bipolaris vezerlesnel mar nem celszeru eltekinteni a speci hidmeghajto ic-ktol, amiket eleg dragan adnak.
Udv
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 június 01, 11:33
Írta: 000000000 Dátum 2005 június 01, 11:33
Az en kerdesemre senki? :)
Cím: Re:Léptetőmotor
Írta: t334wehtf Dátum 2005 június 01, 14:03
Írta: t334wehtf Dátum 2005 június 01, 14:03
Amekkora az ideális lenne, akkorát úgy sem tudsz bontani, max venni. Ha gyengébb a motorod a kelleténél, akkor kissebb menetelemkedésű orsót, és kissebb dinamikát kell beállítani.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 június 01, 14:21
Írta: 000000000 Dátum 2005 június 01, 14:21
Pepper!
Egy hozzávetőleges és egyszerű számítást találsz, ha visszaolvasol (fogalmam sincs, hogy melyik topicban, de emlékszem rá) Egy viszonítási példa az én esetemben : M10 menetesszárral, (2Nm legnagyobb nyomaték) kb. 900N (90kg) nagyságú az az ellenerő, melynél egyensúlyba kerül a rendszer. Természetesen függőleges irányú emelésről van szó. (súrlódás is beleszámítva)
Egy hozzávetőleges és egyszerű számítást találsz, ha visszaolvasol (fogalmam sincs, hogy melyik topicban, de emlékszem rá) Egy viszonítási példa az én esetemben : M10 menetesszárral, (2Nm legnagyobb nyomaték) kb. 900N (90kg) nagyságú az az ellenerő, melynél egyensúlyba kerül a rendszer. Természetesen függőleges irányú emelésről van szó. (súrlódás is beleszámítva)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 június 01, 17:19
Írta: 000000000 Dátum 2005 június 01, 17:19
Koszi sracok a valaszokat! Ezzekkel azert mar lehet egyrol a kettore jutni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 június 08, 22:07
Írta: 000000000 Dátum 2005 június 08, 22:07
http://pepper.dox.hu/motor2/page_01.htm
Nezzetek ra legyszives a linken talalhato motorokra? Ezek lepteto motorok? robotron 202-es, elektromos irogepbol valok. Koszi!
Nezzetek ra legyszives a linken talalhato motorokra? Ezek lepteto motorok? robotron 202-es, elektromos irogepbol valok. Koszi!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 június 08, 23:16
Írta: 000000000 Dátum 2005 június 08, 23:16
PeppeR: ránézésre szerintem ezek aszinkron motorok. Pusztán meghajtásra teremtették öket, nem pedig pontos pozicionálásra. Jól tetted hogy lefotóztad az adattáblát mivel innen kiderül minden: 220V egy léptetömotor ritkán üzemel hálózati feszültségröl, aztán 50/60Hz ez meg végképp kizárja... és ha jól látom (bár nem biztos), de még az indító kondenzátor paraméterei is meg vannak határozva. Mondjuk bipoláris üzemmódban meghajthatod ezeket, de iszonyat pontatlan lesz és az átlag 1.8°-os szögelfordulás helyett ~90°lesz az elfordulás (felezve ~45°). Egyszóval alkalmatlan a célra! Bocs ha a vége hülyeség, mert ez csak pusztán feltételezés... még nem próbáltam soha (nem is fogom :))
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 június 09, 07:18
Írta: 000000000 Dátum 2005 június 09, 07:18
A lenyeget leirtad, hogy alkalmatlanok. Koszi! Akkor keresek tovabb...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 június 09, 17:47
Írta: 000000000 Dátum 2005 június 09, 17:47
Hali!
Megint olyanom van, hogy irok egy rovidebb konyvet ide a forumba! :) Ezuttal a mai tapasztalataimat irom le.
Valamikor reges regen tamadt egy 5letem, hogy milyen jo lenne ha a CNC vezerlot soros porton keresztul lehetne vezerelni. Elso nekifutasra az volt az 5letem, hogy soros porton a tengelynek megfelelo betut kuldom es o azt a tengelyt lepteti. 'X' vagy 'x' pedig azt mondana meg, hogy merre. Ez nagyon egyszerunek is tudnt, egeszen addig amig neki nem lattam a megvalositasanak. Elso problema amit meg kellet oldani, az az hogy ferde vonalat tudjak hozni. Masik topickban leirtam, es van is link hozza. Az oldalamra hamarosan kikerul a vegso program. Masodik problema a sebesseg lett. Az operacios rendszer hatranya, hogy nem lehet rendesen idoziteni. Sehogy sem lehet megoldani (windows), hogy a lepesek kozti idot finoman lehessen szabalyozni. Ebbol fakad, hogy a motort nem lehet teljes fordulatszamon jaratni. DOS-ra meg nincs kedvem visszaterni emiatt. Sajnos ez a problema legyozhetetlennek tunik. Illetve nyilvan megoldhato, de a raforditott munkat inkabb egy masik rendszer kiprobalasara forditom.
Tamadt egy 5letem, hogy sokkal jobb lenne ha a PIC-vegezni a lepesek feldolgozasat. Kapna egy csomagot. Pl: SX0123Y0123Y0123 Ennek alapjan a PIC elvegezni a leptetest. Elonye, hogy PIC-el nagyszeruen lehet idoziteni. Kikuszobolte az elozo megoldas problemajat. Kandon a CNC gep, igy elofogadhato sebesseggel mukodik.
Ahol most tart a projekt: A megoldas mukodik, a PC-n futo szoftvert hozza kell igazitani es kesz is lenne.
Ha lesz forraskod akkor azonnal felteszem az oldalamra.
Megint olyanom van, hogy irok egy rovidebb konyvet ide a forumba! :) Ezuttal a mai tapasztalataimat irom le.
Valamikor reges regen tamadt egy 5letem, hogy milyen jo lenne ha a CNC vezerlot soros porton keresztul lehetne vezerelni. Elso nekifutasra az volt az 5letem, hogy soros porton a tengelynek megfelelo betut kuldom es o azt a tengelyt lepteti. 'X' vagy 'x' pedig azt mondana meg, hogy merre. Ez nagyon egyszerunek is tudnt, egeszen addig amig neki nem lattam a megvalositasanak. Elso problema amit meg kellet oldani, az az hogy ferde vonalat tudjak hozni. Masik topickban leirtam, es van is link hozza. Az oldalamra hamarosan kikerul a vegso program. Masodik problema a sebesseg lett. Az operacios rendszer hatranya, hogy nem lehet rendesen idoziteni. Sehogy sem lehet megoldani (windows), hogy a lepesek kozti idot finoman lehessen szabalyozni. Ebbol fakad, hogy a motort nem lehet teljes fordulatszamon jaratni. DOS-ra meg nincs kedvem visszaterni emiatt. Sajnos ez a problema legyozhetetlennek tunik. Illetve nyilvan megoldhato, de a raforditott munkat inkabb egy masik rendszer kiprobalasara forditom.
Tamadt egy 5letem, hogy sokkal jobb lenne ha a PIC-vegezni a lepesek feldolgozasat. Kapna egy csomagot. Pl: SX0123Y0123Y0123 Ennek alapjan a PIC elvegezni a leptetest. Elonye, hogy PIC-el nagyszeruen lehet idoziteni. Kikuszobolte az elozo megoldas problemajat. Kandon a CNC gep, igy elofogadhato sebesseggel mukodik.
Ahol most tart a projekt: A megoldas mukodik, a PC-n futo szoftvert hozza kell igazitani es kesz is lenne.
Ha lesz forraskod akkor azonnal felteszem az oldalamra.
Cím: Re:Léptetőmotor
Írta: f6kuxbs9f Dátum 2005 június 09, 17:58
Írta: f6kuxbs9f Dátum 2005 június 09, 17:58
Szia Kyrk!
"Tamadt egy 5letem, hogy sokkal jobb lenne ha a PIC-vegezni a lepesek feldolgozasat. Kapna egy csomagot. Pl: SX0123Y0123Y0123 Ennek alapjan a PIC elvegezni a leptetest. Elonye, hogy PIC-el nagyszeruen lehet idoziteni."
Fejlesztesi otletek (remelem van meg libad :-)
- lekuldeni az egesz kodot memoriaba, es off-line feldolgoztatni a geppel. (Kell ra egy vesz-leallito gomb, aminek megnyomasakor azonnal leall, es utana visszaolvashato belole, hol is tartott. Igy ha a munkadarab meg ep, lehet folytatni.)
- az egesz kap egy ethernet portot, igy a gep, amin az adatok elokesziteset vegezted, lehet mashol is, vagy akar tobb geprol is lehet ra adatot kuldeni.
Eldugulok, mielott legyilkolsz :-))
"Tamadt egy 5letem, hogy sokkal jobb lenne ha a PIC-vegezni a lepesek feldolgozasat. Kapna egy csomagot. Pl: SX0123Y0123Y0123 Ennek alapjan a PIC elvegezni a leptetest. Elonye, hogy PIC-el nagyszeruen lehet idoziteni."
Fejlesztesi otletek (remelem van meg libad :-)
- lekuldeni az egesz kodot memoriaba, es off-line feldolgoztatni a geppel. (Kell ra egy vesz-leallito gomb, aminek megnyomasakor azonnal leall, es utana visszaolvashato belole, hol is tartott. Igy ha a munkadarab meg ep, lehet folytatni.)
- az egesz kap egy ethernet portot, igy a gep, amin az adatok elokesziteset vegezted, lehet mashol is, vagy akar tobb geprol is lehet ra adatot kuldeni.
Eldugulok, mielott legyilkolsz :-))
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 június 09, 18:43
Írta: 000000000 Dátum 2005 június 09, 18:43
Hali!
Az ethernet 5let tetszik. Lehet hogy beletervezem a keszulo CNC vezerlombe.
Az offline feldolgozas is tetszik! Sajnos a kandoban elvo vezerlon nincs eeprom. Igy ez is varatni fog magara.
Mindenesetre tovabbgondolasnak tokeltes! Ha a mostani rendszer tokeletes lesz akkor ez lesz majd a kovetkezo lepes. Gyanitom, hogy a vegen mar nem lesz eleg egy PIC. Esetleg FPGA-val megturbozva a dolog :)
Az ethernet 5let tetszik. Lehet hogy beletervezem a keszulo CNC vezerlombe.
Az offline feldolgozas is tetszik! Sajnos a kandoban elvo vezerlon nincs eeprom. Igy ez is varatni fog magara.
Mindenesetre tovabbgondolasnak tokeltes! Ha a mostani rendszer tokeletes lesz akkor ez lesz majd a kovetkezo lepes. Gyanitom, hogy a vegen mar nem lesz eleg egy PIC. Esetleg FPGA-val megturbozva a dolog :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 június 09, 18:44
Írta: 000000000 Dátum 2005 június 09, 18:44
Es amit elfelejtettem. Koszi az 5letet! :)
Cím: Re:Léptetőmotor
Írta: f6kuxbs9f Dátum 2005 június 09, 18:48
Írta: f6kuxbs9f Dátum 2005 június 09, 18:48
Szivesen, otletekkel mindig igen jol allok :-)
Cím: Re:Léptetőmotor
Írta: j3rx6bsjd Dátum 2005 június 09, 19:17
Írta: j3rx6bsjd Dátum 2005 június 09, 19:17
Szia Kyrk!
Jártas vagy a soros porton müködő szoftverek lelki világában,zegzugos bugyraiban?
Akadt némi probléma,amit idő és egyéb problémák miatt nem tudunk megoldani.
Tudnál segíteni?
Egy progit kéne egy vezérlőhöz igazítani.Az eredeti forráskód megvan.A soros porti protokollon kéne módosítani.
Jártas vagy a soros porton müködő szoftverek lelki világában,zegzugos bugyraiban?
Akadt némi probléma,amit idő és egyéb problémák miatt nem tudunk megoldani.
Tudnál segíteni?
Egy progit kéne egy vezérlőhöz igazítani.Az eredeti forráskód megvan.A soros porti protokollon kéne módosítani.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 június 09, 19:33
Írta: 000000000 Dátum 2005 június 09, 19:33
Hali!
Kuld el es megnezem mit tehetek. Ha belefer az idombe akkor jelzek, hogy meg tudom csinalni, ha meg nem fer bele akkor meg ertelemszeruen jelzek, hogy nem tudom megcsinalni. Reszleteket ide: kyrk@villamvadasz.hu
Kuld el es megnezem mit tehetek. Ha belefer az idombe akkor jelzek, hogy meg tudom csinalni, ha meg nem fer bele akkor meg ertelemszeruen jelzek, hogy nem tudom megcsinalni. Reszleteket ide: kyrk@villamvadasz.hu
Cím: Re:Léptetőmotor
Írta: t334wehtf Dátum 2005 június 29, 22:48
Írta: t334wehtf Dátum 2005 június 29, 22:48
Sziasztok!
Na erre varjatok gombot!!!!
Házi készítésű léptetőmotorok!!!!!!!!!!!!
Méretei alapján bődületes nyomatéka lehet.


Na erre varjatok gombot!!!!
Házi készítésű léptetőmotorok!!!!!!!!!!!!
Méretei alapján bődületes nyomatéka lehet.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 június 30, 06:52
Írta: 000000000 Dátum 2005 június 30, 06:52
Próbálj egyet szerezni belőlük (lépésszög?)!
Cím: Re:Léptetőmotor
Írta: t334wehtf Dátum 2005 június 30, 08:40
Írta: t334wehtf Dátum 2005 június 30, 08:40
Már jeleztem neki, hogy árajánlattól függően érdekelne 3 db 120×120 felfogatású (a legkissebb) 120lépés/fordulatos moci. (A vezérlődet hány amperig lehet terhelni???) Egyébként 36-200 lépés/fordulatig tud tekercselni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 június 30, 09:29
Írta: 000000000 Dátum 2005 június 30, 09:29
6A/fázisig nagy biztonsággal hűtés mellett (ügyelj, hogy unipoláris legyen a tekercselése)!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 június 30, 12:46
Írta: 000000000 Dátum 2005 június 30, 12:46
Sziasztok!
Probáltam szerezni ezekböl a házi motorokbol, de semmi esély. Kb fél éve irtam az emberkének. Az első levelemre még volt válasz aztán többszöri probálkozásom is kudarcba fulladt. Azt irta hogy eladásrol szó sem lehet csak bedolgozás vagy hasonló dolgokért lehet nyélbeütni az üzletet. Ezen felbuzdulva irtam neki ismét hogy a forgorészek lemezeinek legyártását vállalom és a tekrecselést is megoldhatjuk. Erre a levelemre csak a visszaigazolás jött meg és mai napig várom a válaszát. Röviden ennyi.
Probáltam szerezni ezekböl a házi motorokbol, de semmi esély. Kb fél éve irtam az emberkének. Az első levelemre még volt válasz aztán többszöri probálkozásom is kudarcba fulladt. Azt irta hogy eladásrol szó sem lehet csak bedolgozás vagy hasonló dolgokért lehet nyélbeütni az üzletet. Ezen felbuzdulva irtam neki ismét hogy a forgorészek lemezeinek legyártását vállalom és a tekrecselést is megoldhatjuk. Erre a levelemre csak a visszaigazolás jött meg és mai napig várom a válaszát. Röviden ennyi.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 június 30, 12:52
Írta: 000000000 Dátum 2005 június 30, 12:52
Kb. nekem is hasonlóak a tapasztalataim (én is próbálkoztam vele, sikertelenül).
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 június 30, 13:03
Írta: 000000000 Dátum 2005 június 30, 13:03
Már én is gondolkoztam hogy gyártok motorokat de kellene DXF formátumban a forgó és az állorész lemezeinek méretei. Cnc stancon percenkénti 800 ütés mellet pikk pakk legyártok párat :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 június 30, 13:09
Írta: 000000000 Dátum 2005 június 30, 13:09
És a nagy erőségű állandómágnest porkohászati úton sajtolod? :-)
Cím: Re:Léptetőmotor
Írta: t334wehtf Dátum 2005 június 30, 13:57
Írta: t334wehtf Dátum 2005 június 30, 13:57
Nekem válaszolt a levelemre, még kérdezte, hogy akkor melyik érdekelne, milyen paraméterekkel, és akkor ír árajánlatot...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 június 30, 14:35
Írta: 000000000 Dátum 2005 június 30, 14:35
Ha majd nem lesz titok, esetleg megosztanád velünk is? Kíváncsi lennék rá (és arra is, hogy tényleg kapható e ha kellene?)!
Cím: Re:Léptetőmotor
Írta: t334wehtf Dátum 2005 június 30, 16:50
Írta: t334wehtf Dátum 2005 június 30, 16:50
Persze!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 június 30, 17:13
Írta: 000000000 Dátum 2005 június 30, 17:13
Én valahogy nem igazán hiszek a "házi készítésű" léptetőmotorban, bár valóban sokmindent lehet házilag készíteni pl.:ismert a házikenyér,házipálinka, házilag még házat is lehet csinálni , sőt még gyereket is, de a léptetőmotor szerintem nem az a műfaj, hogy van öt percem és gyorsan összedobok eggyet. Hacsak a forgórész nézzük már ezer a gond. Megfelelő Si tartalmú trafólemez kiválasztása,beszerzése, sorjamentes kivágása(kivágószerszám legyártása)-- a CNC kivágás felejthető---az összeszerelése sem semmi a tengellyel, csapággyal és akkor még az állandó mágnesről nem beszéltünk ami a mai motoroknál asziszem neodimium-vas bór mágnesből van aminek a porkohászati legyártása a megfelelő geometriára szintén egy tudomány. Ha valaki mégis jól működő léptetőmotort gyárt otthon a konyhaasztal sarkán akkor én mélyen megemelem előtte a kalapom.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 június 30, 18:34
Írta: 000000000 Dátum 2005 június 30, 18:34
Sziasztok!
Én is leveleztem a [barátunkal] lépteőmotor ügyben, választ kaptam, de csak anyi hogy még nemtud, vagy nem akar, árat mondani semilyen
motorra....!!!
Egyébként a motorjai ....nyomatéka.........kérdés!!!
Én is leveleztem a [barátunkal] lépteőmotor ügyben, választ kaptam, de csak anyi hogy még nemtud, vagy nem akar, árat mondani semilyen
motorra....!!!
Egyébként a motorjai ....nyomatéka.........kérdés!!!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 02, 23:54
Írta: 000000000 Dátum 2005 július 02, 23:54
Sziasztok.
Először is kezdenék egy rövid ismerkedéssel. 17 éves Miskolci fiu vagyok. Imádok gravírozni de eddig sajnos csak kézzel volt rá alkalmam. Rengeteget időmet töltöttem el vele. Már lassan 1 éve a fejembe vettem ,hogy építek egy CNC gépet. És nemrégen szereztem 5 db Léptetőmotort. Szeretném kideríteni róluk ,hogy nem-e fingott be valamelyik közüllük. Namármost 6 kivezetése van a motoroknak és a következő paramtérekkel bírnak:
Step-Syn (Sanyo Denkin)
DC 3.9V
1.35A
1.8Deg/Step (200 lépés)
Type 103-771-1242
Szépen szabályosan 6 vezeték jön ki belőle (gondolom ezek szerint Unipoláris kivezetésű)
Narancssárga,Piros,Fehér,Fekete,Kék,Sárga
Szeretném megkérdezni ,hogy melyikre milyen feszültséget adjak ,hogy a motor legalább megmoccanjon? Vagy hogyan derítsem ki azt ,hogy még egyálltalán működnek-e?
A másik ,hogy mennyire jók ezek a motorok? Sajnos ezen a téren nem vagyok otthonos azért kérem a ti tanácsotokat. A másik meg ,hogy a szerkezeten kívül mire lenne szükségem még az elkészítésre? Gondolok itt a Profi1 Vezérlőre stb stb..
Köszi a helpet!
Először is kezdenék egy rövid ismerkedéssel. 17 éves Miskolci fiu vagyok. Imádok gravírozni de eddig sajnos csak kézzel volt rá alkalmam. Rengeteget időmet töltöttem el vele. Már lassan 1 éve a fejembe vettem ,hogy építek egy CNC gépet. És nemrégen szereztem 5 db Léptetőmotort. Szeretném kideríteni róluk ,hogy nem-e fingott be valamelyik közüllük. Namármost 6 kivezetése van a motoroknak és a következő paramtérekkel bírnak:
Step-Syn (Sanyo Denkin)
DC 3.9V
1.35A
1.8Deg/Step (200 lépés)
Type 103-771-1242
Szépen szabályosan 6 vezeték jön ki belőle (gondolom ezek szerint Unipoláris kivezetésű)
Narancssárga,Piros,Fehér,Fekete,Kék,Sárga
Szeretném megkérdezni ,hogy melyikre milyen feszültséget adjak ,hogy a motor legalább megmoccanjon? Vagy hogyan derítsem ki azt ,hogy még egyálltalán működnek-e?
A másik ,hogy mennyire jók ezek a motorok? Sajnos ezen a téren nem vagyok otthonos azért kérem a ti tanácsotokat. A másik meg ,hogy a szerkezeten kívül mire lenne szükségem még az elkészítésre? Gondolok itt a Profi1 Vezérlőre stb stb..
Köszi a helpet!
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2005 július 03, 12:48
Írta: Kristály Árpád Dátum 2005 július 03, 12:48
Hallihó Mindenkinek!
Lehet, hogy én jutottam legmesszebb léptetőmotoros barátunkal?
Én már személyes találkozó lehetőségét is kértem, a vége, hogy valahol Óbudán lehetségesnek találta. Ezek útán felajánlottam, hogy szívesen látom nálam Leányfalun, sőt nem titkoltam, hogy elektrolakatos az eredeti szakmám és szívesen segítenék akár bedolgozás formájában is!
Na ettől a perctől lefagyot az egész!
Miútán a forgórész megoldás felől érdeklőttem, s ajáltam, hogy tudok cégeket akik, valamilyen technikával képesek ilyet csinálni, na erre már végkép nem kaptam választ. Hát ennyi!
Lehet, hogy én jutottam legmesszebb léptetőmotoros barátunkal?
Én már személyes találkozó lehetőségét is kértem, a vége, hogy valahol Óbudán lehetségesnek találta. Ezek útán felajánlottam, hogy szívesen látom nálam Leányfalun, sőt nem titkoltam, hogy elektrolakatos az eredeti szakmám és szívesen segítenék akár bedolgozás formájában is!
Na ettől a perctől lefagyot az egész!
Miútán a forgórész megoldás felől érdeklőttem, s ajáltam, hogy tudok cégeket akik, valamilyen technikával képesek ilyet csinálni, na erre már végkép nem kaptam választ. Hát ennyi!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 03, 13:35
Írta: 000000000 Dátum 2005 július 03, 13:35
Nekem nem tud valaki véletlenül segíteni? Mail címemre is szivesen várok segítséget.. Nem sikerült sajnos rájönnöm még mindig ,hogy most mit hova kellene kötnöm.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 03, 13:36
Írta: 000000000 Dátum 2005 július 03, 13:36
Jaj tényleg megint egy kezdő kérdés. Ugye a motorra 3.9V van ráírva. Namármost pontosan annyi áram kell neki ,vagy lehet többet is meg kevesebbet is neki adni? És ha a motor áramot kap akkor lép egy lépést és utána a következő áramig abban a pozícióban marad? Sajnos nem értem ezeknek a motoroknak az elvi dolgait.. Köszike a segítséget!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 03, 15:34
Írta: 000000000 Dátum 2005 július 03, 15:34
Szia Atesz!
Tudjuk, hogy kezdő vagy, de azért olvasni tudsz ugye? A villamos kapcsolási rajzokat ismered alapszinten? A motor bekötésedre a választ a Léptetőmotorok menü végén megtalálod rajz formályában (van néhány tekecsrajz és alapgerjesztési rajzok). Nézegess szét ott is egy kicsit!
Természetesen a léptetőmotor egészlépéses pozícióban marad gerjesztés nélkül is, de nem ellenőrzött erővel (akár milyen is lehet), ezért pozícióban tartani is gerjesztéssel kell (célszerü csökkentett árammal)!
A motorok névleges áram mellett melegszenek elviselhető szintig, ezért az árammal max eddig érdemes menni. A rákapcsolt feszültség a motor álló helyzetében sima DC fesz. mellett pontosan akkora legyen mint a tekercs ellenállása×tekercs névleges árama (ezek rá vannak írva legtöbbször), de léptetés esetén az induktivitásuk miatt emelni érdemes a tekercsfeszültséget, hogy a névleges áramot minnél jobban tartani tudjuk (ha nem így teszel, esik a nyomatéka rohamosan).
Tudjuk, hogy kezdő vagy, de azért olvasni tudsz ugye? A villamos kapcsolási rajzokat ismered alapszinten? A motor bekötésedre a választ a Léptetőmotorok menü végén megtalálod rajz formályában (van néhány tekecsrajz és alapgerjesztési rajzok). Nézegess szét ott is egy kicsit!
Természetesen a léptetőmotor egészlépéses pozícióban marad gerjesztés nélkül is, de nem ellenőrzött erővel (akár milyen is lehet), ezért pozícióban tartani is gerjesztéssel kell (célszerü csökkentett árammal)!
A motorok névleges áram mellett melegszenek elviselhető szintig, ezért az árammal max eddig érdemes menni. A rákapcsolt feszültség a motor álló helyzetében sima DC fesz. mellett pontosan akkora legyen mint a tekercs ellenállása×tekercs névleges árama (ezek rá vannak írva legtöbbször), de léptetés esetén az induktivitásuk miatt emelni érdemes a tekercsfeszültséget, hogy a névleges áramot minnél jobban tartani tudjuk (ha nem így teszel, esik a nyomatéka rohamosan).
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 03, 19:17
Írta: 000000000 Dátum 2005 július 03, 19:17
Hali!
Az alabbi motorokat kaptam. Volt valakinek mar hasonlo motorokkal dolga?
http://kyrk.no-ip.org/kepek/snap-unknown-20050703-191301-1.jpeg
http://kyrk.no-ip.org/kepek/snap-unknown-20050703-191203-1.jpeg
http://kyrk.no-ip.org/kepek/snap-unknown-20050703-191155-1.jpeg
http://kyrk.no-ip.org/kepek/snap-unknown-20050703-191033-1.jpeg
http://kyrk.no-ip.org/kepek/snap-unknown-20050703-191004-1.jpeg
http://kyrk.no-ip.org/kepek/snap-unknown-20050703-190922-1.jpeg
A meretebol itelve erosnek gondolom. De a latszat neha csalhat is :) Probalt mar valaki hasonlo motorokat? Bevaltak? Mik a tapasztalatok?
Az alabbi motorokat kaptam. Volt valakinek mar hasonlo motorokkal dolga?
http://kyrk.no-ip.org/kepek/snap-unknown-20050703-191301-1.jpeg
http://kyrk.no-ip.org/kepek/snap-unknown-20050703-191203-1.jpeg
http://kyrk.no-ip.org/kepek/snap-unknown-20050703-191155-1.jpeg
http://kyrk.no-ip.org/kepek/snap-unknown-20050703-191033-1.jpeg
http://kyrk.no-ip.org/kepek/snap-unknown-20050703-191004-1.jpeg
http://kyrk.no-ip.org/kepek/snap-unknown-20050703-190922-1.jpeg
A meretebol itelve erosnek gondolom. De a latszat neha csalhat is :) Probalt mar valaki hasonlo motorokat? Bevaltak? Mik a tapasztalatok?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 03, 19:30
Írta: 000000000 Dátum 2005 július 03, 19:30
Huhh... Basszus :D Köszönöm a segítséget. Amúgy már néztem a leírásokat a Léptetőmotoroknál de eddig nem bírtam megérteni a dolgokat.. :S Azért kérdeztem hogy mit tegyek. Bocsánat ha valami rosszat kérdeztem.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 03, 20:04
Írta: 000000000 Dátum 2005 július 03, 20:04
Szia hány darab motorodvan?
Véletlemül három darabot nemadnál el?
Véletlemül három darabot nemadnál el?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 03, 20:07
Írta: 000000000 Dátum 2005 július 03, 20:07
Tramp : Sajnos nem eladoak. CNC gephez kellenek es tulajdonkeppen nem az enyem (hasznalhatom oket de mivel nem en bontottam ezert nem is adhatom el oket) Pont 3 db motorom van.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 03, 20:13
Írta: 000000000 Dátum 2005 július 03, 20:13
Köszi!!!
Megértettem.
Megértettem.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 03, 20:31
Írta: 000000000 Dátum 2005 július 03, 20:31
Ha valakit érdekel akkor én tudok szerezni motorokat.. Az árban megegyezünk!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 03, 20:32
Írta: 000000000 Dátum 2005 július 03, 20:32
Most jelenleg van két darab 200 lépéses Sanyo motorom eladó. Ott lentebb találtok bővebb leírást!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 03, 21:26
Írta: 000000000 Dátum 2005 július 03, 21:26
Atesz: Ha van öt használt motorod, és kell három egy géphez akkor szerintem a maradék kettőt ne add el mert megbánhatod. Persze ez csak egy jó tanács. üdv .: motyoros
Cím: Re:Léptetőmotor
Írta: f6kuxbs9f Dátum 2005 július 03, 21:40
Írta: f6kuxbs9f Dátum 2005 július 03, 21:40
Szia Kyrk!
Szep nagyok, de gyanus, hogy otfazisu motrokrol van szo. Nem 5 vagy 10 kivezetese van veletlenul?
A Vexta (Oriental Motors) mai kinalataban egy ekkora motor 2 Nm koruli nyomateku, a regebbi lehet valamivel kevesebb. Ha a vezerleset meg tudod oldani, sokmindenre jo lehet.
Szep nagyok, de gyanus, hogy otfazisu motrokrol van szo. Nem 5 vagy 10 kivezetese van veletlenul?
A Vexta (Oriental Motors) mai kinalataban egy ekkora motor 2 Nm koruli nyomateku, a regebbi lehet valamivel kevesebb. Ha a vezerleset meg tudod oldani, sokmindenre jo lehet.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 03, 22:08
Írta: 000000000 Dátum 2005 július 03, 22:08
Hali!
6 kivezetese van. Ra van irva hogy leptetomtor, innetol kezdve a vezerlest megoldom legyen akarhany fazisu. Koszi, hogy szobahoztad, kulonben eszemben sem lett volna megnezni kozelebbrol!
Jol hangzik a 2Nm koruli ertek. Regebben valami hasonlot szerettem volna CNC gepre.
6 kivezetese van. Ra van irva hogy leptetomtor, innetol kezdve a vezerlest megoldom legyen akarhany fazisu. Koszi, hogy szobahoztad, kulonben eszemben sem lett volna megnezni kozelebbrol!
Jol hangzik a 2Nm koruli ertek. Regebben valami hasonlot szerettem volna CNC gepre.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 04, 06:14
Írta: 000000000 Dátum 2005 július 04, 06:14
motyoros tudom tudom ,hogy megbánhatom ha eladom pont ezért nem is adom el. :) De rengeteg motort tudok szerezni csak a munkahelyemre kell értük bemennem. Pontosabban körülbelül 2-3 ládányi motorral rendelkezek :). Ezeket a motorokat találtam jónak. Úgyhogy még az ajánlatom mindig áll. Ha valakinek szüksége van motorra akkor megbeszélés után tudok neki szerezni.
Esetleg csere is érdekelne Profi1-es Vezérlőre.. Esetleg építő kittre.
Esetleg csere is érdekelne Profi1-es Vezérlőre.. Esetleg építő kittre.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 04, 06:47
Írta: 000000000 Dátum 2005 július 04, 06:47
Engem érdekelne a dolog! Privát mail ment![#felkialtas]
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2005 július 04, 09:03
Írta: 35kpazcgr Dátum 2005 július 04, 09:03
Atesz!
Engem is érdekelne 3 db motor, olyan 1-1,5 Nm-es nyomatékú! Ez az adat általában nem szerepel az adattáblán, de kb. 1 kg súlyúak ezek a motorok!
Van-e ilyen?
Előre is kössz!
Tomahawk
Engem is érdekelne 3 db motor, olyan 1-1,5 Nm-es nyomatékú! Ez az adat általában nem szerepel az adattáblán, de kb. 1 kg súlyúak ezek a motorok!
Van-e ilyen?
Előre is kössz!
Tomahawk
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 04, 18:20
Írta: 000000000 Dátum 2005 július 04, 18:20
Szia Atesz!
Engemis érdekelne három darab motor!!!
Menyiért adnád?
Engemis érdekelne három darab motor!!!
Menyiért adnád?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 05, 06:51
Írta: 000000000 Dátum 2005 július 05, 06:51
Szia Atesz! Várom a jelentkezésedet![#lookaround]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 05, 07:12
Írta: 000000000 Dátum 2005 július 05, 07:12
Nagy tobbletfeladat lenne, ha osszeallitanal egy egyszeru weblapot a kinalatrol?
Esetleg kepek is felkerulhetnek, meg a motorok fobb adatai.
Esetleg kepek is felkerulhetnek, meg a motorok fobb adatai.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 05, 07:39
Írta: 000000000 Dátum 2005 július 05, 07:39
Ha valakit érdekel van egy pár motorom ITT
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 10, 15:55
Írta: 000000000 Dátum 2005 július 10, 15:55
Pepper nem nagy dolog lenne csak az a baj ,hogy jelenleg készleten azok a Sanyo motorok vannak amiket már írtam nektek. És hogy milyen motor van azt nem fogom előkeresgetni neked már megbocsáss mert 200 km-re messze tőlem van a beszerzése. Szal ha valakit érdekel akkor ilyen Sanyo motor tuti van. De ha valakinek valamilyen más tipus kellene akkor írja meg nekem levélben és utánanézek. Ha minden jól alakul akkor nemsokára lesz egy kisebb listám a motorokról de kép sajnos elképzelhetetlen!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 10, 16:36
Írta: 000000000 Dátum 2005 július 10, 16:36
Akkor mondj egy árat 3-db motorra!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 10, 22:25
Írta: 000000000 Dátum 2005 július 10, 22:25
toma szerintem a Sanyo motorok megvannak 1kg súlyúak. Nemtudom pontosan de ha kell neked lemérem a mérlegen :). Ha valakit érdekel motor akkor keressen meg emailben.
Email: atipda@vipmail.hu
Email: atipda@vipmail.hu
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 10, 23:19
Írta: 000000000 Dátum 2005 július 10, 23:19
Nah csináltam egy egyszerűbb börzét. Még egyenlőre ez az egy szegény motor van még fent az oldalon mert erről találtam legalább leírást valahol :). Majd idővel megpróbálom egy picikét tovább fejlesztgetni..
PPCGate - Börze
Sajnos Toma el kell szomorítsalak de nincsennek 1Nm-esek. Ha tudok szerezni akkor azonnal szólok neked!
Bocsi mindenkitől!
PPCGate - Börze
Sajnos Toma el kell szomorítsalak de nincsennek 1Nm-esek. Ha tudok szerezni akkor azonnal szólok neked!
Bocsi mindenkitől!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 11, 07:14
Írta: 000000000 Dátum 2005 július 11, 07:14
Engem érdekelne nagyobb mennyiségben is! Amint vissza jöttem, jelentkezek nálad és megbeszélhetjük a bartert is!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 11, 16:12
Írta: 000000000 Dátum 2005 július 11, 16:12
Nah mindenkinek akit érdekel léptető motor van egy jó hírem. Megkaptam a listát a léptetőmotorokról a beszállítómtól. Ha valakit komolyabban érdekel akkor érdeklődjön nálam. Valami paramtért ha megad akkor tudok konkrétabb tipust mondani. Megpróbálom felrakni az oldalamra a motorokat. De sajnos ahoz idő kell.
Köszi a megértéseteket..
Köszi a megértéseteket..
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 11, 21:53
Írta: 000000000 Dátum 2005 július 11, 21:53
Megint én vagyok. Lassan már ki fognak tiltani a fórumból annyit dumálok. :) Felraktam egy igen nagy Excel táblázatot a motorokról. Ha valakit érdekel nézze meg. 18-ig sajnos nem vagyok itthon addig is szives elnézéseteket kérem! Mindenkinek válaszolok utána. Érdeklődjetek nyugodtan..
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 12, 14:39
Írta: 000000000 Dátum 2005 július 12, 14:39
Nemtudja valaki hogy egy 3.9A-es motor kb hány Nm-es?
Vagy hogy lehet eszt kiszámolni hozávetölegesen?
Vagy hogy lehet eszt kiszámolni hozávetölegesen?
Cím: Re:Léptetőmotor
Írta: f6kuxbs9f Dátum 2005 július 12, 17:10
Írta: f6kuxbs9f Dátum 2005 július 12, 17:10
Ez sajnos nem ilyen egyszeru, nincs kozvetlen osszefugges az aram es a nyomatek kozott. Sok fugg gyartotol, tipustol, stb.
Erdekes modon a suly / meret es a nyomatek kozott jobb osszefuggest lehet talalni. A hobbys alkalmazasokban legtobbszor hasznalt NEMA 23-as (2,3 zoll elhosszusagu) motorok haromfele mechanikai meretben keszulnek. Amelyik rovidebb, mint az elhossza / atmeroje, az a leggyengebb, stb. Amelyik hosszabb (kb. 80 mm) azok olyan 0,8 - 1,5 Nm kozott szornak. Erdemes nehany gyarto honlapjan megnezni a katalogusokat.
Udv
Erdekes modon a suly / meret es a nyomatek kozott jobb osszefuggest lehet talalni. A hobbys alkalmazasokban legtobbszor hasznalt NEMA 23-as (2,3 zoll elhosszusagu) motorok haromfele mechanikai meretben keszulnek. Amelyik rovidebb, mint az elhossza / atmeroje, az a leggyengebb, stb. Amelyik hosszabb (kb. 80 mm) azok olyan 0,8 - 1,5 Nm kozott szornak. Erdemes nehany gyarto honlapjan megnezni a katalogusokat.
Udv
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 12, 19:24
Írta: 000000000 Dátum 2005 július 12, 19:24
Köszi.
Step-Syn DC 3.9V
1.35A ilyet tudnék most kettöt venni 5.000Ft-ért anyit megér nem?
Step-Syn DC 3.9V
1.35A ilyet tudnék most kettöt venni 5.000Ft-ért anyit megér nem?
Cím: Re:Léptetőmotor
Írta: f6kuxbs9f Dátum 2005 július 12, 21:40
Írta: f6kuxbs9f Dátum 2005 július 12, 21:40
Szia Tramp!
Ha jol sejtem, az Atesz kollega altal kinalt motorokrol van szo :-)
Kerded, hogy megeri-e? Ha jok az altalad epitett gep mozgatasara, akkor megeri. Ha nem jo, akkor egy fillert se er.
Probald meg lemerni a mozgatando tengely terheles nelkuli nyomatekat. Pl. 10 cm-es erokar + rugos eromero vagy sulyok raakasztgatasa. Ebbol kiszamolhatsz egy nyomatekot, aminek a tobbszorose kell, ha megmunkalast is vegzel.
Ha ezekkel a 0,6 Nm-es motorokkal akarsz dolgozni, akkor nem lenne jo, ha a mechanikan mert terheletlen nyomatek tobb lenne 0,1 - 0,2 Nm-nel.
A motorok szabvany meretuek, nyugodtan hagyhatod a beszerzesuket akkorra, amikor mar osszeallt a mechanika.
Erdemes korulnezni az ebay.de oldalon. Rengeteg cnc epiteshez hasznalhato cucc van, jo dolgokat is lehet talalni. En nemreg vettem kb. 9 eFt-nek megfelelo penzert 1,3 Nm-es leptetomotorokat, vadi uj Vexta darabok. Az eredeti motorok akkorak voltak, mint amiket vennel es gyengusnak bizonyultak.
Udv
Ha jol sejtem, az Atesz kollega altal kinalt motorokrol van szo :-)
Kerded, hogy megeri-e? Ha jok az altalad epitett gep mozgatasara, akkor megeri. Ha nem jo, akkor egy fillert se er.
Probald meg lemerni a mozgatando tengely terheles nelkuli nyomatekat. Pl. 10 cm-es erokar + rugos eromero vagy sulyok raakasztgatasa. Ebbol kiszamolhatsz egy nyomatekot, aminek a tobbszorose kell, ha megmunkalast is vegzel.
Ha ezekkel a 0,6 Nm-es motorokkal akarsz dolgozni, akkor nem lenne jo, ha a mechanikan mert terheletlen nyomatek tobb lenne 0,1 - 0,2 Nm-nel.
A motorok szabvany meretuek, nyugodtan hagyhatod a beszerzesuket akkorra, amikor mar osszeallt a mechanika.
Erdemes korulnezni az ebay.de oldalon. Rengeteg cnc epiteshez hasznalhato cucc van, jo dolgokat is lehet talalni. En nemreg vettem kb. 9 eFt-nek megfelelo penzert 1,3 Nm-es leptetomotorokat, vadi uj Vexta darabok. Az eredeti motorok akkorak voltak, mint amiket vennel es gyengusnak bizonyultak.
Udv
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 13, 08:22
Írta: 000000000 Dátum 2005 július 13, 08:22
Szia Victohu.
A motorok nem az Atesz által kináltak eszt máshonan tudnám szerezni.A mechanika kész majd megprobálom lemérni.
A motorok nem az Atesz által kináltak eszt máshonan tudnám szerezni.A mechanika kész majd megprobálom lemérni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 13, 08:59
Írta: 000000000 Dátum 2005 július 13, 08:59
Lemértem 10-cm hoszu erökarral igy 20-30dkg suly kellet az elmozduláshoz.Hogy kell eszt kiszámolni Nm-be?
Cím: Re:Léptetőmotor
Írta: f6kuxbs9f Dátum 2005 július 13, 11:02
Írta: f6kuxbs9f Dátum 2005 július 13, 11:02
Ha 0,1 m-en 2 - 3 N ero kellett, akkor 10x-es erokarral a tizede erovel szamolhatsz, vagyis 0,2 - 0,3 Nm nyomatekkal.
Ez csak a statikus nyomatek igeny, ehhez jon meg a gyorsitando tomeg megmozgatasahoz szukseges energia, valamit a megmunkalo szerszam ellenallasanak lekuzdesere forditando.
Szerintem meg fogja mozgatni a mechanikat, de eleg lassu lesz uresjaratban is, es szenvedni fog, ha megmunkalast is vegez.
Sok fugg persze a megmunkalastol is - fogas melyseg, anyag, stb. Azt sem szabad elfelejteni, hogy az elotolasi sebesseg nem csokkentheto tetszes szerint, mert bizonyos megmunkalasokat nem lehet tul lassan csinalni. Nyak gravirozasahoz, folia kivagasahoz biztos eleg lesz. Alu marasahoz, fa, hore lagyulo muanyagok marasahoz kerdeses.
Udv
Ez csak a statikus nyomatek igeny, ehhez jon meg a gyorsitando tomeg megmozgatasahoz szukseges energia, valamit a megmunkalo szerszam ellenallasanak lekuzdesere forditando.
Szerintem meg fogja mozgatni a mechanikat, de eleg lassu lesz uresjaratban is, es szenvedni fog, ha megmunkalast is vegez.
Sok fugg persze a megmunkalastol is - fogas melyseg, anyag, stb. Azt sem szabad elfelejteni, hogy az elotolasi sebesseg nem csokkentheto tetszes szerint, mert bizonyos megmunkalasokat nem lehet tul lassan csinalni. Nyak gravirozasahoz, folia kivagasahoz biztos eleg lesz. Alu marasahoz, fa, hore lagyulo muanyagok marasahoz kerdeses.
Udv
Cím: Re:Léptetőmotor
Írta: 3vv2btrhv Dátum 2005 július 13, 13:45
Írta: 3vv2btrhv Dátum 2005 július 13, 13:45
Tisztelt Mindenki
Halgatva a motor nyomatékárol folyo eszmecserét ,felrémlet bennem egy ötlet .
Milenne , ha a motor a menetes szárhoz egy sebességválton keresztül csatlakozna.Természetesen csak két sebesség lenne egy a gyorsmenethez egy a megmunkáláshoz .
Várom mindenki hozzászolását
Hunka Tibor
Halgatva a motor nyomatékárol folyo eszmecserét ,felrémlet bennem egy ötlet .
Milenne , ha a motor a menetes szárhoz egy sebességválton keresztül csatlakozna.Természetesen csak két sebesség lenne egy a gyorsmenethez egy a megmunkáláshoz .
Várom mindenki hozzászolását
Hunka Tibor
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 13, 21:24
Írta: 000000000 Dátum 2005 július 13, 21:24
Én erre azt találtam ki, hogy van egy sima szinkron motor ami tekeri a tengelyt ez lenne a gyorsjárat, csak kérdés, hogy mit szól ehhez a stepper, hogy nagyobb sebességgel forog a forgórésze mint amivel saját maga képes léptetni...
(az így nyert energiát visszatáplálom a hálózatba és csináltam egy perpetum mobilét :)))
na ez csak a vicc helye volt...
zsolt
(az így nyert energiát visszatáplálom a hálózatba és csináltam egy perpetum mobilét :)))
na ez csak a vicc helye volt...
zsolt
Cím: Re:Léptetőmotor
Írta: f6kuxbs9f Dátum 2005 július 13, 22:13
Írta: f6kuxbs9f Dátum 2005 július 13, 22:13
Sziasztok!
A léptetőt pörgetheted, a fordulatszámának csak a csapágyazása szab határt.
A gond a vezérlővel lehet, mivel az nincs arra felkészítve, hogy a generátorként működő motor csúnya tüsiket nyomjon vissza neki.
Megfelelő védelem kiépítésével megoldható, bár szerintem ilyen esetben inkább a szervohajtást kell megcélozni. Azzal nagyobb sebességeket, gyorsulásokat lehet elérni.
A léptetőt pörgetheted, a fordulatszámának csak a csapágyazása szab határt.
A gond a vezérlővel lehet, mivel az nincs arra felkészítve, hogy a generátorként működő motor csúnya tüsiket nyomjon vissza neki.
Megfelelő védelem kiépítésével megoldható, bár szerintem ilyen esetben inkább a szervohajtást kell megcélozni. Azzal nagyobb sebességeket, gyorsulásokat lehet elérni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 14, 11:24
Írta: 000000000 Dátum 2005 július 14, 11:24
"Mi lenne , ha a motor a menetes szárhoz egy sebességválton keresztül csatlakozna." -- hát szerintem meredek ötlet, egy holtjátékmentes áttételház, ráadásul legalább egy két fokozatú sebváltó amit még elektronikusan kapcsolgatni is kellene ez rendkívül megdrágítaná, megbonyolítaná az egészet.
"egy sima szinkron motor ami tekeri a tengelyt ez lenne a gyorsjárat" ez meg azér problémás mert ha a szinkron motor üzembelép elvész minden pozicio újból lehet az egészet nullázni, mivel a rendszer nyílt húrku
"egy sima szinkron motor ami tekeri a tengelyt ez lenne a gyorsjárat" ez meg azér problémás mert ha a szinkron motor üzembelép elvész minden pozicio újból lehet az egészet nullázni, mivel a rendszer nyílt húrku
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 14, 12:41
Írta: 000000000 Dátum 2005 július 14, 12:41
Erre egy a tengelyvégére szerelt jeladót gondoltam:
http://telectronic.hu/elektro/optojel.htm
zsolt
http://telectronic.hu/elektro/optojel.htm
zsolt
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 14, 16:14
Írta: 000000000 Dátum 2005 július 14, 16:14
A jeladó jelét viszont a Mach 2, Kcam4, turbocnc stb hobby cnc szoftverek nem tudják kezelni
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 14, 19:36
Írta: 000000000 Dátum 2005 július 14, 19:36
Nem lehet minden tökéletes.... :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 14, 20:40
Írta: 000000000 Dátum 2005 július 14, 20:40
Talaltam egy jo PDF filet leptetomotorokrol! Szerintem kezdoknek nagy segitseg lehet!
http://www.st.com/stonline/books/ascii/docs/1679.htm
Tudja valaki, hogy miert hasznalnak inkabb PWM-et mint aramgeneratoros meghajtast? Mi lehet az elonye a PWM-nek? Olcsobb, egyszerubb vagy tobb plusz nyomatekot hoz mint az aramgeneratoros megoldas?
http://www.st.com/stonline/books/ascii/docs/1679.htm
Tudja valaki, hogy miert hasznalnak inkabb PWM-et mint aramgeneratoros meghajtast? Mi lehet az elonye a PWM-nek? Olcsobb, egyszerubb vagy tobb plusz nyomatekot hoz mint az aramgeneratoros megoldas?
Cím: Re:Léptetőmotor
Írta: f6kuxbs9f Dátum 2005 július 14, 21:03
Írta: f6kuxbs9f Dátum 2005 július 14, 21:03
Sziasztok!
Ezt a leptetomtort erdemes megnezni, bar nem hobbi kategoria:
http://cgi.ebay.de/ws/eBayISAPI.dll?ViewItem&item=7531055566&ssPageName=ADME:B:SS:DE:1
Udv
Ezt a leptetomtort erdemes megnezni, bar nem hobbi kategoria:
http://cgi.ebay.de/ws/eBayISAPI.dll?ViewItem&item=7531055566&ssPageName=ADME:B:SS:DE:1
Udv
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 15, 13:27
Írta: 000000000 Dátum 2005 július 15, 13:27
Hali!
Szerintem érdemes tovább is böngészni. Mivel nem találtam meg az index html-t, módosítgattam az url-t, ez is volt már téma a fórumon:
http://www.st.com/stonline/books/pdf/docs/1673.pdf
Jó kutakodást!
Szerintem érdemes tovább is böngészni. Mivel nem találtam meg az index html-t, módosítgattam az url-t, ez is volt már téma a fórumon:
http://www.st.com/stonline/books/pdf/docs/1673.pdf
Jó kutakodást!
Cím: Re:Léptetőmotor
Írta: ebalint Dátum 2005 július 18, 13:38
Írta: ebalint Dátum 2005 július 18, 13:38
Üdv mindenkinek!
Van 2db ilyen
http://lum_pen.tar.hu/egyeb/berger.pdf
és 1 db ilyen
http://lum_pen.tar.hu/egyeb/hp.pdf
motorom.
Gondolom, hogy az utóbbit gond nélkül tudnám használni vmelyik PCB vezérlővel, de mit lehet kezdeni a két Bergerrel?
Előre is köszi.
Van 2db ilyen
http://lum_pen.tar.hu/egyeb/berger.pdf
és 1 db ilyen
http://lum_pen.tar.hu/egyeb/hp.pdf
motorom.
Gondolom, hogy az utóbbit gond nélkül tudnám használni vmelyik PCB vezérlővel, de mit lehet kezdeni a két Bergerrel?
Előre is köszi.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 18, 15:22
Írta: 000000000 Dátum 2005 július 18, 15:22
Pontosan mekkora az a berger ? mert a képen 3 méretben van.
Eladod vagy cseréled vagy pontosan mit szeretnél ?
Ha tudunk cserélni akkor tudok adni 3 egyformát.
zsolt
Eladod vagy cseréled vagy pontosan mit szeretnél ?
Ha tudunk cserélni akkor tudok adni 3 egyformát.
zsolt
Cím: Re:Léptetőmotor
Írta: ebalint Dátum 2005 július 18, 18:07
Írta: ebalint Dátum 2005 július 18, 18:07
Hát úgy látszik, meleg van felénk...
Az két Bergerem az RDM 564/50 típusú:
5,2 V / 1,4 A fázisonként.
Részben azon múlik, hogy mit szeretnék vele, ha kiderül, hogy milyen módon lehet használni.
Üdv.
Az két Bergerem az RDM 564/50 típusú:
5,2 V / 1,4 A fázisonként.
Részben azon múlik, hogy mit szeretnék vele, ha kiderül, hogy milyen módon lehet használni.
Üdv.
Cím: Re:Léptetőmotor
Írta: f6kuxbs9f Dátum 2005 július 18, 19:49
Írta: f6kuxbs9f Dátum 2005 július 18, 19:49
Sziasztok!
Otfazisu motort mivel fogtok vezerelni?
Udv
Otfazisu motort mivel fogtok vezerelni?
Udv
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 18, 21:35
Írta: 000000000 Dátum 2005 július 18, 21:35
bocs, de nekem még mindig nem 1értelmû, hogy a képen látható motork közül melyik az...
1ébként az 5 fázis egy rázós fázis lesz :))
zsolt
1ébként az 5 fázis egy rázós fázis lesz :))
zsolt
Cím: Re:Léptetőmotor
Írta: ebalint Dátum 2005 július 19, 12:44
Írta: ebalint Dátum 2005 július 19, 12:44
Erre szeretnék vmilyen választ ...
Sajnos a vezérlőt nem volt szerencsém látni!
Üdv.
Sajnos a vezérlőt nem volt szerencsém látni!
Üdv.
Cím: Re:Léptetőmotor
Írta: ebalint Dátum 2005 július 19, 12:46
Írta: ebalint Dátum 2005 július 19, 12:46
Hát attól tartok, hogy az adatlapon látható motorok közül egyik sem igazán ...
Azt hiszem az lesz a legjobb, ha teszek föl képeket is!
De a fő kérdés : milyen vezérlő alkalmas?
Üdv.
Azt hiszem az lesz a legjobb, ha teszek föl képeket is!
De a fő kérdés : milyen vezérlő alkalmas?
Üdv.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 19, 13:10
Írta: 000000000 Dátum 2005 július 19, 13:10
a képeket várom.
attól tartok, hogy ez nem az elterjedt vezérlô kategória...., így talán ha saját magad készítessz hozzá vezérlôt akkor tudod használni.
zsolt
attól tartok, hogy ez nem az elterjedt vezérlô kategória...., így talán ha saját magad készítessz hozzá vezérlôt akkor tudod használni.
zsolt
Cím: Re:Léptetőmotor
Írta: ebalint Dátum 2005 július 19, 16:47
Írta: ebalint Dátum 2005 július 19, 16:47
Hát így néz ki a Berger :


Üdv.
Üdv.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 19, 18:01
Írta: 000000000 Dátum 2005 július 19, 18:01
khmmm, hát azt hittem, hogy ezek azok a nagy darabok amik a pdf-ben voltak.
Én sem találtam semmi infót ezekrôl.
Ha érdekel akkor tudok adni 3 db egyforma unipoláris vagy bipoláris motort ami bármelyik cnc vezérlôhöz kapcsolható.
zsolt
Én sem találtam semmi infót ezekrôl.
Ha érdekel akkor tudok adni 3 db egyforma unipoláris vagy bipoláris motort ami bármelyik cnc vezérlôhöz kapcsolható.
zsolt
Cím: Re:Léptetőmotor
Írta: ebalint Dátum 2005 július 20, 12:10
Írta: ebalint Dátum 2005 július 20, 12:10
Szia!
Köszönöm az ajánlatot, de még nem döntöttem a motorok ügyében.
Közben István motor készletét böngészve látom, hogy van az ajánlatában 5 fázisú motor. / 46 -so kóddal /.
Remélem, tud vmi bíztatót!
A 0,72 / 0,36 lépésszög miatt is...
Köszönöm az ajánlatot, de még nem döntöttem a motorok ügyében.
Közben István motor készletét böngészve látom, hogy van az ajánlatában 5 fázisú motor. / 46 -so kóddal /.
Remélem, tud vmi bíztatót!
A 0,72 / 0,36 lépésszög miatt is...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 20, 12:52
Írta: 000000000 Dátum 2005 július 20, 12:52
ok, nekem mind1, végsô soron meglévô motorjaimmal könnyebben meg tudom oldani a meghajtást, ez az 5 fázis inkább különlegessége miatt érdekelt volna.
zsolt
zsolt
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 23, 22:03
Írta: 000000000 Dátum 2005 július 23, 22:03
Erről a motorról szeretnék információt, de nem találtam a sanyo honlapján. Adatok:
STEP-SYN
Type: 103G770-0163
5.1V
1A
1.8deg/step
STEP-SYN
Type: 103G770-0163
5.1V
1A
1.8deg/step
Cím: Re:Léptetőmotor
Írta: f6kuxbs9f Dátum 2005 július 25, 20:02
Írta: f6kuxbs9f Dátum 2005 július 25, 20:02
Sziasztok!
A pwm managerrel probalgattam kb. 100 impulzus/sec sebesseggel a leptetomotorjaimat, ellenoriztem a bekotesuket.
A rakapcsolt motor perceken belul kozelitette a kezzel mar nem megfoghato homersekletet. Ez termeszetes jelenseg? A pwm manager esetleg telibe adja ra a tapot, nem chopperel? Ha Mach2-vel hajtom, varhato, hogy csokken a melegedes?
A motor Vexta 5,4 V, 1,5 A, a pufferelkon uresjaratban 21 V van, ami egy motor terhelesevel sem csokkenhet erdemleges mertekben, a tap legalabb5 A-t tud.
Koszi a valaszokat.
A pwm managerrel probalgattam kb. 100 impulzus/sec sebesseggel a leptetomotorjaimat, ellenoriztem a bekotesuket.
A rakapcsolt motor perceken belul kozelitette a kezzel mar nem megfoghato homersekletet. Ez termeszetes jelenseg? A pwm manager esetleg telibe adja ra a tapot, nem chopperel? Ha Mach2-vel hajtom, varhato, hogy csokken a melegedes?
A motor Vexta 5,4 V, 1,5 A, a pufferelkon uresjaratban 21 V van, ami egy motor terhelesevel sem csokkenhet erdemleges mertekben, a tap legalabb5 A-t tud.
Koszi a valaszokat.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 26, 06:41
Írta: 000000000 Dátum 2005 július 26, 06:41
Nem. a Vezérlő nincs ráhangolva a motorodhoz! T1-et beállítottad? Mérjél áramot majd a motorral sorbakötve! Ilyen táp/motor fesz arány mellett kb. T1=5..10 !!!
Olvad el a Motor tuningot!
Olvad el a Motor tuningot!
Cím: Re:Léptetőmotor
Írta: f6kuxbs9f Dátum 2005 július 26, 11:18
Írta: f6kuxbs9f Dátum 2005 július 26, 11:18
Köszi a választ, még csak első próba volt, most fogok jobban elmélyedni benne.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 31, 18:37
Írta: 000000000 Dátum 2005 július 31, 18:37
Sziasztok!
A véleményeteket szeretném kérni erről a motorról!
http://www.nanotec.com/page_zweiphasen_st5709_en.html
ezen belűl ST5709S1208 1.06 Nm .Viszonylag elfogadható az ára.Kb.: 14 ezer a farnell-nél (A ST5709L1108-B kb.: 21 ezer 1.91 Nm).500X500-as munkaterületű gépet építenék vele.Csapágyazott görgökkel.
A véleményeteket szeretném kérni erről a motorról!
http://www.nanotec.com/page_zweiphasen_st5709_en.html
ezen belűl ST5709S1208 1.06 Nm .Viszonylag elfogadható az ára.Kb.: 14 ezer a farnell-nél (A ST5709L1108-B kb.: 21 ezer 1.91 Nm).500X500-as munkaterületű gépet építenék vele.Csapágyazott görgökkel.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 31, 18:43
Írta: 000000000 Dátum 2005 július 31, 18:43
Szerintem megfelelő, de ilyen motorok nekem is vannak fele ennyiért, sőt...
Persze használtak és "csak" 1.8°-osak.
Persze használtak és "csak" 1.8°-osak.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 július 31, 18:44
Írta: 000000000 Dátum 2005 július 31, 18:44
Sokszor figyelem, hogy milyen bivaly motorokkal építkeztek.
Kísérletképpen készítettem egy 3:1 áttételû meghajtást, és erre egy kb. 0.3Nm-es motor tettem.
Namost az orsón lévô anyát próbáltam visszafogni, hogy ne tudjon elmozdulni, de kb. akkora erôt kellett kifejtenem, mint egy vasipari marógépen amikor 1mm-es fogással neki esek egy vastömbnek...
Szóval télleg nem értem miért kell egy rakat pénzt költeni arra amire szinte semmi szükség sincs.
zsolt
Kísérletképpen készítettem egy 3:1 áttételû meghajtást, és erre egy kb. 0.3Nm-es motor tettem.
Namost az orsón lévô anyát próbáltam visszafogni, hogy ne tudjon elmozdulni, de kb. akkora erôt kellett kifejtenem, mint egy vasipari marógépen amikor 1mm-es fogással neki esek egy vastömbnek...
Szóval télleg nem értem miért kell egy rakat pénzt költeni arra amire szinte semmi szükség sincs.
zsolt
Cím: Re:Léptetőmotor
Írta: SquirrelTech Dátum 2005 augusztus 01, 20:08
Írta: SquirrelTech Dátum 2005 augusztus 01, 20:08
Üdv!
A helyzet az, hogy én is 3:1 (~2.8:1) körüli áttételaránnyal építettem ki a dolgot, pici motorokkal. Mindamellett hogy a pontosságot is növeli nem csak a nyomatékot, van azért hátránya is: A motor egy megadott fordulat fölé nem nagyon pörgethető, és többségében így 3x-os megmunkális időt jelenthet az áttételezés (ha csak gyorspoziccionálásnál pörögnek maximumon, akkor is rengeteg időmegtakarítás lehet). Bár hobby gépekről van szó , adott esetben lehet mégsem mindegy, hogy 1 vagy 3 óra alatt produkálja ugyanaz a gépezet...
A "termelékenység" szó a válasz arra, amit nem értessz :).
Az erős motorból könnyebb többet kihozni.
Tamás
A helyzet az, hogy én is 3:1 (~2.8:1) körüli áttételaránnyal építettem ki a dolgot, pici motorokkal. Mindamellett hogy a pontosságot is növeli nem csak a nyomatékot, van azért hátránya is: A motor egy megadott fordulat fölé nem nagyon pörgethető, és többségében így 3x-os megmunkális időt jelenthet az áttételezés (ha csak gyorspoziccionálásnál pörögnek maximumon, akkor is rengeteg időmegtakarítás lehet). Bár hobby gépekről van szó , adott esetben lehet mégsem mindegy, hogy 1 vagy 3 óra alatt produkálja ugyanaz a gépezet...
A "termelékenység" szó a válasz arra, amit nem értessz :).
Az erős motorból könnyebb többet kihozni.
Tamás
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 augusztus 01, 20:33
Írta: 000000000 Dátum 2005 augusztus 01, 20:33
tudom, mindenki a sebességgel tör elô, ezt én értem is, ne de ezért képes kifizetni 20-30e ft-ot... ?
inkább párhuzamosan teszek 3 motort ha kell...., mint hogy megvegyem darabját 15-20e ft körül...
bár igaz könnyen beszélek én akinek van 30egynéhány db egyforma motorja :)
zsolt
inkább párhuzamosan teszek 3 motort ha kell...., mint hogy megvegyem darabját 15-20e ft körül...
bár igaz könnyen beszélek én akinek van 30egynéhány db egyforma motorja :)
zsolt
Cím: Re:Léptetőmotor
Írta: SquirrelTech Dátum 2005 augusztus 01, 21:28
Írta: SquirrelTech Dátum 2005 augusztus 01, 21:28
Hát az az igazság, hogy nem mindenki. Nekem is van egy reklámszatyornyi bontott motor, a legkülönfélébbekig. A szebb StepSyn példányokat viszont szebb napokra tartogatom és nem építettem be jelenlegi konstrukcióba. Érezni azért, hogy csak "tipeg". Valahol mindegy is, mivel a gép eleve dolgozik helyettem, ha gyorsan, ha lassan, de teszi a dolgát :)
De pl. KCam esetében fontos kiemelni (lásd a leírást a lapon), hogy 90-100% körüli prociidőt igényel, és addig a computert se nagyon tudom másra használni.
Lepörgött egy másik szálon a DC szervó esete is - mint alternatíva, a párhuzamba szerelés mellé. Egy kicsit más jellegű többletmunkával sem feltétlen kell tízezreket a léptetőmotorra költeni. (~önindító motor... :) De a szervóhoz meg a vezérlés van relatíve sokba.
Node ez már télleg a másik topik :).
Tamás
De pl. KCam esetében fontos kiemelni (lásd a leírást a lapon), hogy 90-100% körüli prociidőt igényel, és addig a computert se nagyon tudom másra használni.
Lepörgött egy másik szálon a DC szervó esete is - mint alternatíva, a párhuzamba szerelés mellé. Egy kicsit más jellegű többletmunkával sem feltétlen kell tízezreket a léptetőmotorra költeni. (~önindító motor... :) De a szervóhoz meg a vezérlés van relatíve sokba.
Node ez már télleg a másik topik :).
Tamás
Cím: Re:Léptetőmotor
Írta: SquirrelTech Dátum 2005 augusztus 01, 21:34
Írta: SquirrelTech Dátum 2005 augusztus 01, 21:34
Picit máshogy is meg lehet közelíteni ezt a költség dolgot. Gondolj arra, hogy van aki tizmilliókat képes komplett megmunkálórendszer(ek)re költeni. De tény az is, hogy azt készen kapja, és vajmi kicsi rizikófaktort vállal fel úgy. Mig ha maga építgeti össze a dolgokat...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 augusztus 01, 22:13
Írta: 000000000 Dátum 2005 augusztus 01, 22:13
jah, igen de akinek 10 milliója van az nem fog itt reszelni, hanem megveszi kompletten.
Na mind1 ebbôl nem csinálok problémát.
Akinek van költse csak, minél többet :)
zsolt
Na mind1 ebbôl nem csinálok problémát.
Akinek van költse csak, minél többet :)
zsolt
Cím: Re:Léptetőmotor
Írta: Bicska Dátum 2005 augusztus 02, 13:42
Írta: Bicska Dátum 2005 augusztus 02, 13:42
Ne felejtsd el, hogy nem mindegy, hogy milyen a mechanikád. Én az Isván-féle motorokat 1:30 áttétellel sem tudtam volna használni. (persze ez nem a motorok, hanem a mechanikám "hibája") Muszáj volt 50k/db-ért vennem motorokat. Viszont ezek a motorok 8Nm-esek, és az 1:4 áttétellel már elég lazán fognak marni(majd egyszer)[#eljen]. Úgy voltam vele, hogy 1x kell megvenni őket. Lehet, hogy 10 év múlva fogok csinálni egy másik cnc gépet..és bármi legyen is az..ezek a motorok elég erősek lesznek hozzá..
Az áttételből eredő lassúság nem nagy probléma számomra, hiszen egyrészt ezek a motorok tudnak "gyorsan" is forogni, másrészt ez egy marógép (nem elsősorban gravírozó, mint nektek), ezért úgyis nagyon lassú előtolás fog kelleni.
Egyébként ezek után már csak az maradt bökkenő, hogy a hobby cnc-t össze kell hoznom ezekkel a "nem hobby" motorokkal és ez nem egyszerű.
Bicska
Az áttételből eredő lassúság nem nagy probléma számomra, hiszen egyrészt ezek a motorok tudnak "gyorsan" is forogni, másrészt ez egy marógép (nem elsősorban gravírozó, mint nektek), ezért úgyis nagyon lassú előtolás fog kelleni.
Egyébként ezek után már csak az maradt bökkenő, hogy a hobby cnc-t össze kell hoznom ezekkel a "nem hobby" motorokkal és ez nem egyszerű.
Bicska
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 augusztus 11, 19:47
Írta: 000000000 Dátum 2005 augusztus 11, 19:47
Hali!
Ugy dontottem,hogy eladom a leptetomotorjaimat.
http://kyrk.villamvadasz.hu/elado/index.cgi
Felhivom a figyelmet, hogy a 3 db azonos tipusu motor 5 fazisu (oriental motor)!!!
Tovabbi info e-mailben!
Ugy dontottem,hogy eladom a leptetomotorjaimat.
http://kyrk.villamvadasz.hu/elado/index.cgi
Felhivom a figyelmet, hogy a 3 db azonos tipusu motor 5 fazisu (oriental motor)!!!
Tovabbi info e-mailben!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 augusztus 12, 20:35
Írta: 000000000 Dátum 2005 augusztus 12, 20:35
hiába küldök nelked levelet, mindig visszakapom:
The original message was received at Fri, 12 Aug 2005 11:19:57 +0200
from adsl-7-168.pool.tvnet.hu [195.38.113.168]
----- Transcript of session follows -----
<kyrk@villamvadasz.hu>... Deferred: Connection timed out with mail.villamvadasz.hu.
Warning: message still undelivered after 4 hours
Will keep trying until message is 5 days old
légyszives csinálj már valami elérhetô e-mail címet.
Érdekel a 3 5fázisú..., meg esetleg más is
The original message was received at Fri, 12 Aug 2005 11:19:57 +0200
from adsl-7-168.pool.tvnet.hu [195.38.113.168]
----- Transcript of session follows -----
<kyrk@villamvadasz.hu>... Deferred: Connection timed out with mail.villamvadasz.hu.
Warning: message still undelivered after 4 hours
Will keep trying until message is 5 days old
légyszives csinálj már valami elérhetô e-mail címet.
Érdekel a 3 5fázisú..., meg esetleg más is
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 augusztus 12, 20:41
Írta: 000000000 Dátum 2005 augusztus 12, 20:41
Hali!
Kaptam toled egy ures levelet. Megnezem mi lehet a postafiokommal. Addig is itt egy masik cim : kyrk.5@dpg.hu
Kaptam toled egy ures levelet. Megnezem mi lehet a postafiokommal. Addig is itt egy masik cim : kyrk.5@dpg.hu
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 augusztus 16, 23:39
Írta: 000000000 Dátum 2005 augusztus 16, 23:39
Azt szeretném megtudni, hogy ennek a motorfajtát van -e értelme ilyen cnc megoldásokra beszerezni:
ROBOTRON SPA 42/100-558 unipolar léptető / stepper motor
Motortest mérete: 42 x 42 x 37 mm
Rögzíto csavarok távolsága: 31 x 31 mm
Rögzíto csavarok: M3 x 6.5 mm
Tengelyátmérő: 4 mm
Hossz elől: 15 mm
Hossz hátul: 7.5 mm
Kivezetések: 6 kivezetés, 3 fázisonként, unipoláris bekötés
Tekercs ellenállás: 26.4 Ohm / tekercs unipoláris meghajtásnál
Tekercs feszültség: 8 V unipoláris meghajtásnál, 12 V soros bipoláris meghajtásnál,
Tekercs áram: 0.30 A unipoláris üzemmódban, 0.227 A soros bipoláris üzemmódban,
Felbontás: Step resolution: 100 lépés/fordulat, 3.6 fok/lépés
Tartó nyomaték: 13.4 Ncm soros bipoláris üzemmódban,
ROBOTRON SPA 42/100-558 unipolar léptető / stepper motor
Motortest mérete: 42 x 42 x 37 mm
Rögzíto csavarok távolsága: 31 x 31 mm
Rögzíto csavarok: M3 x 6.5 mm
Tengelyátmérő: 4 mm
Hossz elől: 15 mm
Hossz hátul: 7.5 mm
Kivezetések: 6 kivezetés, 3 fázisonként, unipoláris bekötés
Tekercs ellenállás: 26.4 Ohm / tekercs unipoláris meghajtásnál
Tekercs feszültség: 8 V unipoláris meghajtásnál, 12 V soros bipoláris meghajtásnál,
Tekercs áram: 0.30 A unipoláris üzemmódban, 0.227 A soros bipoláris üzemmódban,
Felbontás: Step resolution: 100 lépés/fordulat, 3.6 fok/lépés
Tartó nyomaték: 13.4 Ncm soros bipoláris üzemmódban,
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 augusztus 17, 07:06
Írta: 000000000 Dátum 2005 augusztus 17, 07:06
Szerintem gyengék, persze attol is függ milyen (mekkora) mechanikát kellene mozgatnia! Én nem javaslom (kár a munkáért).
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 augusztus 17, 10:53
Írta: 000000000 Dátum 2005 augusztus 17, 10:53
Köszönöm szépen a választ.
Egyébként egy olyan jellegű géphez gondoltam őket mint a Mechanika 2. Jobbára csak gravírozás, fa marásra kellene.
Egyébként egy olyan jellegű géphez gondoltam őket mint a Mechanika 2. Jobbára csak gravírozás, fa marásra kellene.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 augusztus 17, 11:12
Írta: 000000000 Dátum 2005 augusztus 17, 11:12
Ahoz is gyengék ezek!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 augusztus 17, 11:23
Írta: 000000000 Dátum 2005 augusztus 17, 11:23
OK!
mégértettem :-)
mégértettem :-)
Cím: Re:Léptetőmotor
Írta: ebalint Dátum 2005 augusztus 17, 16:26
Írta: ebalint Dátum 2005 augusztus 17, 16:26
Szia!
Az 5 fázisú motorok vezérlőjéből nem maradt semmi?
Érdekel, mert nekem is van 2 db Berger gyártmány, de vezérlő eddig nincs... :-(
Üdv.
Az 5 fázisú motorok vezérlőjéből nem maradt semmi?
Érdekel, mert nekem is van 2 db Berger gyártmány, de vezérlő eddig nincs... :-(
Üdv.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 augusztus 17, 20:11
Írta: 000000000 Dátum 2005 augusztus 17, 20:11
5 fázisú motorokért, unipoláris motorokat adnék cserébe.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 augusztus 18, 06:44
Írta: 000000000 Dátum 2005 augusztus 18, 06:44
Nekem van 1, lásd a léptetőmotorokat. Szívesen elcserélném valami normális unipolárisra (>1A-esre)!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 augusztus 19, 11:27
Írta: 000000000 Dátum 2005 augusztus 19, 11:27
Nem hiszem , hogy egy használati értékben nagyobb motort adnék érte.
ami nekem van azt már láttad és nem reagáltál rá semmit.
zsolt
ami nekem van azt már láttad és nem reagáltál rá semmit.
zsolt
Cím: Re:Léptetőmotor
Írta: knifemaster Dátum 2005 augusztus 28, 16:34
Írta: knifemaster Dátum 2005 augusztus 28, 16:34
Jónapot,kellene nekem egy kis segítség:)
Szert tettem pár db motorra,viszont csak egy tipusszámot tudok róla.
23PM-C315-04
Hasonlít a 20.sz motorra,a léptetőmotorok menüpont alatt,csak az C303. Tudhatja az enyém azokat az értékeket mint a C303 -as?
Szert tettem pár db motorra,viszont csak egy tipusszámot tudok róla.
23PM-C315-04
Hasonlít a 20.sz motorra,a léptetőmotorok menüpont alatt,csak az C303. Tudhatja az enyém azokat az értékeket mint a C303 -as?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 augusztus 28, 17:03
Írta: 000000000 Dátum 2005 augusztus 28, 17:03
Hát ha legalább a tekercs ellenállását kiméred, akkor össze lehetne hasonlítani vele (de ez persze nem sok minden)!
Cím: Re:Léptetőmotor
Írta: knifemaster Dátum 2005 augusztus 28, 18:37
Írta: knifemaster Dátum 2005 augusztus 28, 18:37
Azt majd más,nem értek a lovakhoz.:)
Bár azt megtudtam,hogy forgótárcsás nyerőgépekhez használják,erős a gyanúm,hogy minebea gyártmány,bár azt nem tudom(nem merem biztosra venni)hogy bi vagy unipoláris motor. 5 vezeték jön ki belőle,2 piros 2 zőld 1 fehér.(Ha bipoláris az nem is fog menni a porfi1-el igaz?)
Bár azt megtudtam,hogy forgótárcsás nyerőgépekhez használják,erős a gyanúm,hogy minebea gyártmány,bár azt nem tudom(nem merem biztosra venni)hogy bi vagy unipoláris motor. 5 vezeték jön ki belőle,2 piros 2 zőld 1 fehér.(Ha bipoláris az nem is fog menni a porfi1-el igaz?)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 augusztus 28, 18:55
Írta: 000000000 Dátum 2005 augusztus 28, 18:55
Hát igen!
Legaláb a tekercsrendszert kéne tisztázni...
Legaláb a tekercsrendszert kéne tisztázni...
Cím: Re:Léptetőmotor
Írta: j3rx6bsjd Dátum 2005 augusztus 28, 19:08
Írta: j3rx6bsjd Dátum 2005 augusztus 28, 19:08
Hali mindenkinek!
Érdekelne,hogy vesztek-e valamit a biporális feltéttel és ha igen akkor mit?
Ha jól tudom a feltét használatával az unipolár motor bipolárisan használva valamennyivel nagyobb nyomatékot ad le.
Érdekelne,hogy vesztek-e valamit a biporális feltéttel és ha igen akkor mit?
Ha jól tudom a feltét használatával az unipolár motor bipolárisan használva valamennyivel nagyobb nyomatékot ad le.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 augusztus 28, 19:17
Írta: 000000000 Dátum 2005 augusztus 28, 19:17
Igen vesztesz, bipoláris üzemben nincs lehetőséged féllépésre.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 augusztus 28, 19:29
Írta: 000000000 Dátum 2005 augusztus 28, 19:29
Ezt ki mondta?!
Ez nem igaz! Miért ne lehetne?
A félléptetés a két tekercs egyidejü gerjesztése ami bipolárisan sem gond. Független hidakról van szó, amit egyszerre is lehet vezérelni meg külön-külön is!
egyetlen dolgot veszítesz a bipoláris feltéttel:
a motorok nagysebességű futásánál jelentkező induktív visszahatást a híd a diódák miatt jobban fékezi, ezért a max sebessége a bipoláris motornak kissebb mint egy unipoláris motornak, viszont a nyomatéka nagyobb. Unipoláris motornál a supressor diódák küszöbszintje határozza meg a max sebességnél fellépő elnyeletésből adódó motorfék erősségét ami pl. a Profi1-es emeltfeszültségű Vezérlőnél 100V felett jelentkezik, míg a bipoláris feltétnél a sima diódák nyitó irányú vezérlése miatt már a motortápfesz felett egyből jelentkezik!
Szóval elméletileg az unipoláris vezérlésnél nagyobb max. sebességet lehet elérni, de relatíve kisebb nyomaték mellett.
Ez nem igaz! Miért ne lehetne?
A félléptetés a két tekercs egyidejü gerjesztése ami bipolárisan sem gond. Független hidakról van szó, amit egyszerre is lehet vezérelni meg külön-külön is!
egyetlen dolgot veszítesz a bipoláris feltéttel:
a motorok nagysebességű futásánál jelentkező induktív visszahatást a híd a diódák miatt jobban fékezi, ezért a max sebessége a bipoláris motornak kissebb mint egy unipoláris motornak, viszont a nyomatéka nagyobb. Unipoláris motornál a supressor diódák küszöbszintje határozza meg a max sebességnél fellépő elnyeletésből adódó motorfék erősségét ami pl. a Profi1-es emeltfeszültségű Vezérlőnél 100V felett jelentkezik, míg a bipoláris feltétnél a sima diódák nyitó irányú vezérlése miatt már a motortápfesz felett egyből jelentkezik!
Szóval elméletileg az unipoláris vezérlésnél nagyobb max. sebességet lehet elérni, de relatíve kisebb nyomaték mellett.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 augusztus 29, 12:46
Írta: 000000000 Dátum 2005 augusztus 29, 12:46
Hello!
Szeretnék építeni egy gépet( kb olyat mint a 14-es mechanika), de még kezdő vagyok tud valaki valamit erről a motorról ( sanyo denki 103-771-1242). Érdemes vele építeni mekkora lehet a nyomatéka?
köszi.
Szeretnék építeni egy gépet( kb olyat mint a 14-es mechanika), de még kezdő vagyok tud valaki valamit erről a motorról ( sanyo denki 103-771-1242). Érdemes vele építeni mekkora lehet a nyomatéka?
köszi.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 augusztus 29, 13:02
Írta: 000000000 Dátum 2005 augusztus 29, 13:02
Igen! Nézd meg itt:
Rejtett adatbázis.
15. motor
A készlet és árr nem érvényes!
Jó motor, kb. 0.4 - 0.6 Nm-es lehet.
Rejtett adatbázis.
15. motor
A készlet és árr nem érvényes!
Jó motor, kb. 0.4 - 0.6 Nm-es lehet.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 augusztus 29, 13:16
Írta: 000000000 Dátum 2005 augusztus 29, 13:16
Köszönöm az információt. Szerinted mennyiért érdemes megvennem max? A Robotron SPA 52/60-5682 sokkal gyengébb? Mert ilyenem van de attól tartok az gyenge lenne.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 augusztus 29, 13:31
Írta: 000000000 Dátum 2005 augusztus 29, 13:31
Az SPA 52/60 picit gyengébb, lassabb, és durvább a felbontása (6°-os).
Kisérletnek és sokszor elég az SPA is, de a Japán komolyabb.
Kisérletnek és sokszor elég az SPA is, de a Japán komolyabb.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 augusztus 29, 13:37
Írta: 000000000 Dátum 2005 augusztus 29, 13:37
Köszi, szerinted először csináljam meg az NDK motorral és majd ha jól működik vegyek komolyabb motort.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 augusztus 29, 15:20
Írta: 000000000 Dátum 2005 augusztus 29, 15:20
Lehet így is, ez a biztonságos de több munka (lehet, hogy elég oda az NDK is).
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 október 12, 12:55
Írta: 000000000 Dátum 2005 október 12, 12:55
Kérdés :
Adott két különböző típusjelzésű léptetőmotor egy gyártótól. Mindkettő motor paraméterei kis különbségekkel megegyeznek. 2.1 Nm tartónyomatékú mindkettő. A különbség a rotor inercia paraméterben van , egyiknek 0.84, másiknak 1.45, Az ár 50% nagyobb az utóbbi motor javára. A kérdésem az, hogy mit befolyásolhat nagy mértékben ez a praméter ennyi pénzért ?
Adott két különböző típusjelzésű léptetőmotor egy gyártótól. Mindkettő motor paraméterei kis különbségekkel megegyeznek. 2.1 Nm tartónyomatékú mindkettő. A különbség a rotor inercia paraméterben van , egyiknek 0.84, másiknak 1.45, Az ár 50% nagyobb az utóbbi motor javára. A kérdésem az, hogy mit befolyásolhat nagy mértékben ez a praméter ennyi pénzért ?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 október 12, 13:29
Írta: 000000000 Dátum 2005 október 12, 13:29
na lehet hogy hülyeség...
szvsz ez a forgórész elektromágnes ellenállása, hogy ez pontosan mit takar, illetve miben és mennyiben befolyásolja a motor működését arról fogalmam sincs [#confused]
az árból itélve minél nagyobb a szám annál drágább és annál jobb? az már más tészta, hogy az átlag felhasználót egy átlag cnc gép építésekor mennyire érinti ez a problema. ha engem kérdezel és az olcsóbbra szavazok.
Na ha valaki tudja, hogy mi ez pontosan az jó lenne, ha megírná, mert engem is elkezdett izgatni ez a kérdés (utálom ha egy kérdés izgat) [#vigyor2]
szvsz ez a forgórész elektromágnes ellenállása, hogy ez pontosan mit takar, illetve miben és mennyiben befolyásolja a motor működését arról fogalmam sincs [#confused]
az árból itélve minél nagyobb a szám annál drágább és annál jobb? az már más tészta, hogy az átlag felhasználót egy átlag cnc gép építésekor mennyire érinti ez a problema. ha engem kérdezel és az olcsóbbra szavazok.
Na ha valaki tudja, hogy mi ez pontosan az jó lenne, ha megírná, mert engem is elkezdett izgatni ez a kérdés (utálom ha egy kérdés izgat) [#vigyor2]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 október 12, 13:54
Írta: 000000000 Dátum 2005 október 12, 13:54
Beszéltem egy szakmérnökkel. Szerinte a nagyobb rotorinercia érték lehetővé teszi, hogy magasabb fordulatszámon kezdjen csökkeni a forgatónyomatékunk. Számszerűen : az olcsóbbik motor nyomatéka 300f/min után meredeken hanyatlik, a drágábbiknál pedig 800 f/min forulat után. Tehát : az átlag felhasználót pl. előtolási sebesség max. értékének meghatározásában érintheti a dolog. (pl. ha valaki faiparban dolgozik, feltehetően nagyobb előtolással magy előre az anyagban)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 október 12, 14:05
Írta: 000000000 Dátum 2005 október 12, 14:05
na mostmár ezt is tudom... akkor mégis fontos lehet az "átlag"-nak
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 október 12, 15:38
Írta: 000000000 Dátum 2005 október 12, 15:38
Árban mit jelentenek???
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 október 12, 16:00
Írta: 000000000 Dátum 2005 október 12, 16:00
A rotor inercia a forgórész tehetetlenségi nyomatéka. Általában arányos a forgórész tömegével, de az átmérő/hossz arány is befolyásolja. (gondolj a lendkerékre) Szerepe a gyorsításkor és fékezéskor van, mert nem csak a hajtott berendezést kell gyorsítani és lassítani, hanem önmagát is. Nagy általánosságban elmondható, hogy a nyomaték arányos a forgórész tömegével. Tehát a nagyobb rotor inerciájú motor "erősebb" de lassabban gyorsítható és fékezhető. (pontosabban nagyobb gyorsító és fékező áramot kell alkalmazni
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 október 12, 21:18
Írta: 000000000 Dátum 2005 október 12, 21:18
köszi a választ Imi, ezt fedi MakraZ (ill. a szakmérnök) állítása is.
Inercia alatt elég sok dolgot értenek, alapvetően a valamihez történő viszonyítást (a többi meg gondolom ebből ered, vagy visszavezethető). Nekem az elektromágneses ellenállás volt szimpatikusabb, de akkor mégsem... ...vagy mégis? minden mozgó test mágneses mezőt hoz létre maga körül, amit nehéz felépíteni és nehéz lebontani... ez is egyfajta tehetetlenség [#vigyor2]
Inercia alatt elég sok dolgot értenek, alapvetően a valamihez történő viszonyítást (a többi meg gondolom ebből ered, vagy visszavezethető). Nekem az elektromágneses ellenállás volt szimpatikusabb, de akkor mégsem... ...vagy mégis? minden mozgó test mágneses mezőt hoz létre maga körül, amit nehéz felépíteni és nehéz lebontani... ez is egyfajta tehetetlenség [#vigyor2]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 október 13, 14:10
Írta: 000000000 Dátum 2005 október 13, 14:10
Sziasztok.
Sikerült szereznem pár motort, de sajnos nincs semmi adat róluk. 4 kivezetéses, 2 darab különálló 5 ohm-os tekercsel. 3.6fokos.
4 kivezetésest egyáltalán lehet rákötni a vezérlőre?
Sikerült szereznem pár motort, de sajnos nincs semmi adat róluk. 4 kivezetéses, 2 darab különálló 5 ohm-os tekercsel. 3.6fokos.
4 kivezetésest egyáltalán lehet rákötni a vezérlőre?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 október 13, 15:33
Írta: 000000000 Dátum 2005 október 13, 15:33
rá lehet, ha építesz a vezérlőhöz egy bipoláris meghajtót... rajz a bővitések menüpont alatt
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2005 október 24, 20:16
Írta: s5f8tmfv3 Dátum 2005 október 24, 20:16
Hello!
Sikerült beszereznem 3db kétfázisú unipoláris Vexta steppert: 2V, 4A, 1,8 fok/step. Átmérő 56mm, hossz 76mm. A Vexta support nem árulja el a nyomatékát mondván hogy ők ezt a típust egy másik cégnek gyártják.
Szerintetek mekkora lehet a nyomatékuk?
Üdv!
Sikerült beszereznem 3db kétfázisú unipoláris Vexta steppert: 2V, 4A, 1,8 fok/step. Átmérő 56mm, hossz 76mm. A Vexta support nem árulja el a nyomatékát mondván hogy ők ezt a típust egy másik cégnek gyártják.
Szerintetek mekkora lehet a nyomatékuk?
Üdv!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 október 24, 21:29
Írta: 000000000 Dátum 2005 október 24, 21:29
Itt előttem az oriental vexta katalógusa, de nincs olyan 56.4mm-es motor, amelyik 4A/fázistáramot vesz fel. Legközelebb áll hozzá a 85mm-es PK-296-03 típus, ez 2V 4.5A, 2.2Nm Unipolar. 56.4 motorok közül a legnyomatékosabb 1.75Nm-ad le, mindezt teszi 3V és 3A.
Én 1.2 és 2.2 közé tippelném.
Én 1.2 és 2.2 közé tippelném.
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2005 október 25, 19:10
Írta: s5f8tmfv3 Dátum 2005 október 25, 19:10
Köszönöm!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 november 01, 14:20
Írta: 000000000 Dátum 2005 november 01, 14:20
Van otfazisu mocivezerlom kapcsrajz, tap, minden doksival. A mukodo masina egy foiskola tulajdonat kepezi :) Eleg regimodi amugy, viszont elonye, hogy minden kis zugban rejtozkodo elektronikai boltban kapni hozza alkatreszt. Viszont ha mar tobbfaziskodunk, akkor erdemes 3fazisu AC szervoval foglalkozni, ahhoz manapsag eleg konnyu vezerlest csinalni, csak maga a motor sokkal tobbe kerul, mint egy leptetomci.
Apropo, Nanotec motorokat cask ajanlani tudom, par evvel ezelott nagyon korrekt arakon dolgoztak, akkoriban megvettem a masinamhoz a naluk kaphato legbrutalabb 1,8 fokos lepesszogu 2fazisu motort, (Jo nagy nyomatek mar egy gerjesztett tekercs eseten is) meg egy ismeros masinajahoz a 0,9 fokos motorokat. Szerintem az a csucs kis gepekre :) (olcso)
Apropo, Nanotec motorokat cask ajanlani tudom, par evvel ezelott nagyon korrekt arakon dolgoztak, akkoriban megvettem a masinamhoz a naluk kaphato legbrutalabb 1,8 fokos lepesszogu 2fazisu motort, (Jo nagy nyomatek mar egy gerjesztett tekercs eseten is) meg egy ismeros masinajahoz a 0,9 fokos motorokat. Szerintem az a csucs kis gepekre :) (olcso)
Cím: Re:Léptetőmotor
Írta: tumnmsi57 Dátum 2005 november 09, 19:27
Írta: tumnmsi57 Dátum 2005 november 09, 19:27
Üdv Mindenkinek!
Van 2 db SANY DENKI 103G742-0141 motorom. Szerintetek milyen??? Ha valakinek van dokuja róla , azt szívesen venném!
Van 2 db SANY DENKI 103G742-0141 motorom. Szerintetek milyen??? Ha valakinek van dokuja róla , azt szívesen venném!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 november 12, 11:41
Írta: 000000000 Dátum 2005 november 12, 11:41
- Típus: SANYO DENKI CO. 103G742-0141 (Japan)
- Tekercsrendszer: két fázisú, Unipoláris (6 kivezetéses).
- Lépés: 1.8°/Step
- Feszültség: 3.8V=
- Áram: 1.75A
- Tekercs ellenállása: 2x2.17 Ohm/fázis
- Súlya: ~0.7kg
- Motortengely átmérője: 6.4 mm
- Felfogó csavartávolságok: 3x47mm (M4)
- Tekercsrendszer: két fázisú, Unipoláris (6 kivezetéses).
- Lépés: 1.8°/Step
- Feszültség: 3.8V=
- Áram: 1.75A
- Tekercs ellenállása: 2x2.17 Ohm/fázis
- Súlya: ~0.7kg
- Motortengely átmérője: 6.4 mm
- Felfogó csavartávolságok: 3x47mm (M4)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 november 12, 11:44
Írta: 000000000 Dátum 2005 november 12, 11:44
[#felkialtas]A sokak által kereset "GÓLIÁT" motorokból van most néhány darab! Amig a készlet tart (és ez nem sokáig tart...)!

Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 november 12, 12:19
Írta: 000000000 Dátum 2005 november 12, 12:19
Mit tud ez a góliát?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 november 12, 12:51
Írta: 000000000 Dátum 2005 november 12, 12:51
Forogni :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 november 12, 13:15
Írta: 000000000 Dátum 2005 november 12, 13:15
Sajnos csak villamos adatok vannak róla, de a tengely átmérője sokat sejtet (több mint 9mm)!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 november 12, 14:25
Írta: 000000000 Dátum 2005 november 12, 14:25
Ha jól számoltam át akkor 0,64Nm futási és 0,92Nm tartónyomatékú a "kicsike". Brutális!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 november 12, 14:34
Írta: 000000000 Dátum 2005 november 12, 14:34
Ezt miből számoltad?[#confused]
Cím: Re:Léptetőmotor
Írta: f6kuxbs9f Dátum 2005 november 12, 15:08
Írta: f6kuxbs9f Dátum 2005 november 12, 15:08
Kevésnek tűnik egy ekkora motorhoz.
Üdv
Üdv
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 november 12, 15:27
Írta: 000000000 Dátum 2005 november 12, 15:27
Nem katalógusadat, csak egy kereskedelmi ismertető a 26-ik bekezdésben.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 november 12, 16:53
Írta: 000000000 Dátum 2005 november 12, 16:53
Nem vagyok meggyőződve, hogy valós adatok vannak ott! A tengely átmérője és a motor tetemes vastömege jóval nagyobb nyomatékot sejtet!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 november 15, 14:15
Írta: 000000000 Dátum 2005 november 15, 14:15
Brutalis??? ez inkabb HARMATOS :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 november 15, 14:17
Írta: 000000000 Dátum 2005 november 15, 14:17
Amugy ha nem uj a moci erdemes megmerni a tartonyomatekat. (raraksz ismert sugaru tarcsat, aztan sulyozod, 1kg kerkeitve veheto 10N-nak)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 november 15, 17:40
Írta: 000000000 Dátum 2005 november 15, 17:40
Szomorú vagyok.:(
Hirtelen felindulásból szétkaptam 3db leselejtezett mátrixnyomtatót 2db A3, 1db A4, találtam benne léptetőmotorokat, de a light kategóriából. Sajnos ezek nekem mát így ránézésre is kicsinek tűnnek. Van valakinek ötelete, hogy mit bontsak szét? Miben lehetne közepes méretű ~6-os tengelyátmérőjű motorokat találni? Szembe jött egy régi Robotron (16xx) írógép is, kapjam szét?
Hirtelen felindulásból szétkaptam 3db leselejtezett mátrixnyomtatót 2db A3, 1db A4, találtam benne léptetőmotorokat, de a light kategóriából. Sajnos ezek nekem mát így ránézésre is kicsinek tűnnek. Van valakinek ötelete, hogy mit bontsak szét? Miben lehetne közepes méretű ~6-os tengelyátmérőjű motorokat találni? Szembe jött egy régi Robotron (16xx) írógép is, kapjam szét?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 november 15, 18:03
Írta: 000000000 Dátum 2005 november 15, 18:03
Póblkozz lézennyomtatókkal, nekem is abból van SanyoDenki 103-as sorozatú motorom.
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2005 november 16, 08:58
Írta: Kristály Árpád Dátum 2005 november 16, 08:58
Hallihó Mindenkinek!
T. coco!
Ismerem az érzést, de folyatasd tovább. Én már minkét méretű nyomtatóban találtam, főleg SanyoDenki motorokat, a HP nyomtatoknál álltalában a motor nem szedhető szét, és a tengelyvég egy ferdefogazású ráadásúl spirális végű, ha meg túdod oldani a kuplungot, márpedig a tömlös megoldással megleht ez is jó. a HP motor töbnyire erősebb. Mármint közel azonos paraméretű nyomtatókmál.
Hallihó
T. coco!
Ismerem az érzést, de folyatasd tovább. Én már minkét méretű nyomtatóban találtam, főleg SanyoDenki motorokat, a HP nyomtatoknál álltalában a motor nem szedhető szét, és a tengelyvég egy ferdefogazású ráadásúl spirális végű, ha meg túdod oldani a kuplungot, márpedig a tömlös megoldással megleht ez is jó. a HP motor töbnyire erősebb. Mármint közel azonos paraméretű nyomtatókmál.
Hallihó
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 november 17, 08:53
Írta: 000000000 Dátum 2005 november 17, 08:53
[#heureka]Felhívom a figyelmet mindenkinek, hogy a "Góliát" motorok beállítására nem érvényes a PWM Manager lapján szereplő mintabeállítások! A motor lényegesen nagyobb vasmagja miatt az induktivitása is nagyobb egy kis méretű motoréhoz képest, ezért magasabb T1 értékekel használható (sőt magasabb motorfeszültséggel is)!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 november 29, 18:05
Írta: 000000000 Dátum 2005 november 29, 18:05
Hello mindenki!
sikerült szereznem 3db még nem használt SANYO DENKI 103G770-1843 tip. motort (3,5V 1,5A 1,8deg/step 2,7ohm/fázis)Tudja valaki,hogy kb. mekkora lehet a nyomatéka?
sikerült szereznem 3db még nem használt SANYO DENKI 103G770-1843 tip. motort (3,5V 1,5A 1,8deg/step 2,7ohm/fázis)Tudja valaki,hogy kb. mekkora lehet a nyomatéka?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 november 29, 20:25
Írta: 000000000 Dátum 2005 november 29, 20:25
számszerű adatot nem tudok, de egész jók[#vigyor2]
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2005 november 29, 20:48
Írta: s5f8tmfv3 Dátum 2005 november 29, 20:48
Ezt néztétek? Nem pont ugyanaz, de hasonló [#pardon1]. Cirka 0,6 Nm lehet ( bipoláris meghajtás mellett ).
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 november 29, 21:53
Írta: 000000000 Dátum 2005 november 29, 21:53
Köszi az infót.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 november 30, 12:09
Írta: 000000000 Dátum 2005 november 30, 12:09
Sziasztok! Halatt valaki olyanról hogy tekernyelnek léptetö motorokat? Már sikerült egy 2-3at öszehoznom!:)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 november 30, 22:55
Írta: 000000000 Dátum 2005 november 30, 22:55
Lenne egy kis kérdésem..
Nekem van 3db Gamma MLV 350/24 típ. léptetőmotorom!
Nah ott kezdődik a problem hogy 3fázisú és 4 kivezetéses! (csillagba van kötve közös neg-al)
Lehet ezt használni a Profi 1 vezérlővel?
És ha lehet akkor hogy kell?!
Előre is köszi a segítséget!
Nekem van 3db Gamma MLV 350/24 típ. léptetőmotorom!
Nah ott kezdődik a problem hogy 3fázisú és 4 kivezetéses! (csillagba van kötve közös neg-al)
Lehet ezt használni a Profi 1 vezérlővel?
És ha lehet akkor hogy kell?!
Előre is köszi a segítséget!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 01, 07:14
Írta: 000000000 Dátum 2005 december 01, 07:14
Sajnos nem használható!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 01, 08:46
Írta: 000000000 Dátum 2005 december 01, 08:46
De sajnálom mert ez 1 picivel erősebb léptetőmotor.:(
Csak 2 fázisú 6 kivezetésest tud működtetni?
mert van nekem több léptetőmotorom is de sajna 1-ik sem!
így jártam...
köszönöm a gyors választ!
Csak 2 fázisú 6 kivezetésest tud működtetni?
mert van nekem több léptetőmotorom is de sajna 1-ik sem!
így jártam...
köszönöm a gyors választ!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 01, 10:20
Írta: 000000000 Dátum 2005 december 01, 10:20
Igen, 6 vagy 8 (univerzális) kivezetésest.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 01, 12:36
Írta: 000000000 Dátum 2005 december 01, 12:36
szóval a 2 fázisú 8 kivezetésest is tudja kezelni?
az jó...:D
köszönöm.
Most kezdtem bele a "mechanika 16"-os hasonlító csak erősebb váz és erősebb léptetőmotorokkal.
Kissebb fémmegmunkáláshoz..
szóval lehet lesz még 1 pár kérdésem..:D
köszönöm..
az jó...:D
köszönöm.
Most kezdtem bele a "mechanika 16"-os hasonlító csak erősebb váz és erősebb léptetőmotorokkal.
Kissebb fémmegmunkáláshoz..
szóval lehet lesz még 1 pár kérdésem..:D
köszönöm..
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 01, 13:18
Írta: 000000000 Dátum 2005 december 01, 13:18
A 8 kivezetésest kösd majd el 6 kivezetésesnek (lásd a Léptetőmotorok végén)!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 01, 14:46
Írta: 000000000 Dátum 2005 december 01, 14:46
Az Istvánnál található "Góliát" motorokhoz Sanyo Denki 103-820-0241 nem tud valaki véletlenül adatlapot?
Cím: Re:Léptetőmotor
Írta: dg8n4i8x Dátum 2005 december 04, 17:41
Írta: dg8n4i8x Dátum 2005 december 04, 17:41
Sziasztok!
Hajt valaki NDK motort 24V-ról? Vagy próblkozott vele valaki? Nem igazán találom az ideális beállítást.
Hajt valaki NDK motort 24V-ról? Vagy próblkozott vele valaki? Nem igazán találom az ideális beállítást.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 04, 17:52
Írta: 000000000 Dátum 2005 december 04, 17:52
Az M1 24V-ról megy, de a motor is 24V (nincs igazán tuningólva)![#vigyor4]
Cím: Re:Léptetőmotor
Írta: dg8n4i8x Dátum 2005 december 04, 18:21
Írta: dg8n4i8x Dátum 2005 december 04, 18:21
Azt elfelejtettem, hogy SPA 52/60-5682-es motorról van szó ami elvileg 12V-os és a 2A helyett több mint 3-at vesz fel!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 04, 18:56
Írta: 000000000 Dátum 2005 december 04, 18:56
T1-et csökkenteni!!!
Cím: Re:Léptetőmotor
Írta: vthgizrff Dátum 2005 december 10, 21:29
Írta: vthgizrff Dátum 2005 december 10, 21:29
Sziasztok! "Góliát" motort milyen beállításokkal járatjátok?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 11, 08:14
Írta: 000000000 Dátum 2005 december 11, 08:14
12V-ról T1=255 és inkább 24V-ról érdemes járatni (T1~100)!
Cím: Re:Léptetőmotor
Írta: dw576aerx Dátum 2005 december 11, 10:52
Írta: dw576aerx Dátum 2005 december 11, 10:52
Sziasztok! Kérdés: mekkora az áramfelvétel az előző két esetben!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 11, 12:41
Írta: 000000000 Dátum 2005 december 11, 12:41
Az bonyolult! Függ a léptetési frekvenciától! A lényeg, hogy effektív DC-re visszavonatkoztatva a névlegesét ne lépje túl (használd inkább a megfigyelés elvét, lásdd a Motor tuning leírásban)!
Cím: Re:Léptetőmotor
Írta: vthgizrff Dátum 2005 december 11, 13:08
Írta: vthgizrff Dátum 2005 december 11, 13:08
Köszi az infót! a másik motorom fele akkora (Minebea 23LM-C701-01 5.2V 1.4A) gondolom ennek sem lessz baja 24Volton, ha aT1-et lejjebb veszem.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 11, 14:11
Írta: 000000000 Dátum 2005 december 11, 14:11
"használd inkább a megfigyelés elvét" füstjelek, sötétben izzás, stb. [#vigyor2]
Bocs...
Bocs...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 18, 16:27
Írta: 000000000 Dátum 2005 december 18, 16:27
Ismeri valaki ezt a motort? SANYO DENKI CO. 103-771-1242-es tipusú. A bekötése érdekelne.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 18, 17:53
Írta: 000000000 Dátum 2005 december 18, 17:53
Ismerem, jó kis motor! Bekötése unipoláris és csak mérd ki egy Ohmmérővel a tekercsét! Tekecs elmélet a Léptetőmotorok menü alján!
Cím: Re:Léptetőmotor
Írta: Rinaldo Dátum 2005 december 19, 17:46
Írta: Rinaldo Dátum 2005 december 19, 17:46
Sziasztok,
A napokban kezemügyébe került néhány Sanyo Denki katalógus (adatlap),talán hasznát tudjátok venni!A File Tárházba megtaláljátok.
Jó munkát, és Boldog Karácsdonyt Mindenkinek!
A napokban kezemügyébe került néhány Sanyo Denki katalógus (adatlap),talán hasznát tudjátok venni!A File Tárházba megtaláljátok.
Jó munkát, és Boldog Karácsdonyt Mindenkinek!
Cím: Re:Léptetőmotor
Írta: Bicska Dátum 2005 december 21, 18:10
Írta: Bicska Dátum 2005 december 21, 18:10
Sziasztok!
Sikerült hozzájutnom pár Sanyo-Denki motorhoz. Esetleg van vkinek tapasztalata a 103G770-1843-sal kapcsolatban? Egyébként ugyan úgy néz ki mint ez.
Előre is Boldog Karácsonyt és "barkácsolós" sikerekben gazdag Újévet!
Sikerült hozzájutnom pár Sanyo-Denki motorhoz. Esetleg van vkinek tapasztalata a 103G770-1843-sal kapcsolatban? Egyébként ugyan úgy néz ki mint ez.
Előre is Boldog Karácsonyt és "barkácsolós" sikerekben gazdag Újévet!
Cím: Re:Léptetőmotor
Írta: Bicska Dátum 2005 december 21, 18:11
Írta: Bicska Dátum 2005 december 21, 18:11
vagyis ez.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 21, 18:16
Írta: 000000000 Dátum 2005 december 21, 18:16
A File Tárházban nézted az adatlapokat?
Cím: Re:Léptetőmotor
Írta: Bicska Dátum 2005 december 21, 19:14
Írta: Bicska Dátum 2005 december 21, 19:14
Milyen formátum az adatlap? Egyébként nem igazán tudom beazonosítani, mert nincs benne 00x-es tag.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 21, 19:28
Írta: 000000000 Dátum 2005 december 21, 19:28
Hát nem tudom, nem én raktam ki! Nem darabolt Commanderrel?
Cím: Re:Léptetőmotor
Írta: Rinaldo Dátum 2005 december 21, 21:08
Írta: Rinaldo Dátum 2005 december 21, 21:08
Szia Bicska,
Az azonos nevű sorszámozott fájlokat és a crc kiterjesztésűt is egyenkénént (cél mentése)letöltöd ugyanazon helyre.Total cmd-vel-fileegyesítés majd kicsomagolás,és lessz 3 db pdf fájlod tele rengeteg sanyo denki adattal 2-3 és 5 fázisú motorokról + vezérlőkről.
Az azonos nevű sorszámozott fájlokat és a crc kiterjesztésűt is egyenkénént (cél mentése)letöltöd ugyanazon helyre.Total cmd-vel-fileegyesítés majd kicsomagolás,és lessz 3 db pdf fájlod tele rengeteg sanyo denki adattal 2-3 és 5 fázisú motorokról + vezérlőkről.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 23, 07:47
Írta: 000000000 Dátum 2005 december 23, 07:47
Sziasztok.
Szerintetek egy 1.5Nm-es sanyo denki motorért reális 10.000ft?
Üdv.:zoli
Szerintetek egy 1.5Nm-es sanyo denki motorért reális 10.000ft?
Üdv.:zoli
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2005 december 23, 08:49
Írta: D.Laci Dátum 2005 december 23, 08:49
Egy kicsit olcsó!! vagy nem?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 23, 09:58
Írta: 000000000 Dátum 2005 december 23, 09:58
Nemtudom szerinted igen?
Cím: Re:Léptetőmotor
Írta: f6kuxbs9f Dátum 2005 december 23, 10:20
Írta: f6kuxbs9f Dátum 2005 december 23, 10:20
Nem tűnik drágának, azért állapot kérdése is.
Csak a viszonyítás kedvéért, én tegnap kaptam meg a csomagot, amiben egy 1,3 Nm-es, 400 lépéses Vexta motor jött. Szállítással és bankköltséggel együtt 30 Euroért. Az ebay.de-n vettem.
Üdv
Csak a viszonyítás kedvéért, én tegnap kaptam meg a csomagot, amiben egy 1,3 Nm-es, 400 lépéses Vexta motor jött. Szállítással és bankköltséggel együtt 30 Euroért. Az ebay.de-n vettem.
Üdv
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 23, 10:40
Írta: 000000000 Dátum 2005 december 23, 10:40
Az a baj hogy nemtudok németül és ezáltal nemnagyon vágom az e-bay-t te tudsz németül?
Cím: Re:Léptetőmotor
Írta: f6kuxbs9f Dátum 2005 december 23, 11:20
Írta: f6kuxbs9f Dátum 2005 december 23, 11:20
Igazad van, a nyelvtudas nem befolyasolja hatranyosan a beszerzest :-))
Ha gondolod nezd meg az ebay.co.uk oldalt, az angolul van, de meg mindig eu, tehat vammentes. Az usa-bol ilyen teteleket ideszallitattni altalaban nem erdemes.
Udv
Ha gondolod nezd meg az ebay.co.uk oldalt, az angolul van, de meg mindig eu, tehat vammentes. Az usa-bol ilyen teteleket ideszallitattni altalaban nem erdemes.
Udv
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 23, 11:59
Írta: 000000000 Dátum 2005 december 23, 11:59
kb. 2x annyiert mar 0,9 fok felbontasut, 2Nm tartonyomatekkal kapsz. Noviujan, es az 2000-es fordulaton meg hoz 1Nm-t megfelelo hajtassal
Cím: Re:Léptetőmotor
Írta: Bicska Dátum 2005 december 26, 13:09
Írta: Bicska Dátum 2005 december 26, 13:09
Hello
Nem tudná valaki elküldeni a sanyo-denki katalógust mailben, mert a tárházből már nem tudom letölteni? Előre is kösszi!
Nem tudná valaki elküldeni a sanyo-denki katalógust mailben, mert a tárházből már nem tudom letölteni? Előre is kösszi!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 26, 23:17
Írta: 000000000 Dátum 2005 december 26, 23:17
Szia.
Mail cimed?
Mail cimed?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 27, 00:14
Írta: 000000000 Dátum 2005 december 27, 00:14
Ma felrakom az uw-ra a sanyo denki motorok.pdf
és egy pár értelmes dolgot.
A cim tramp.uw.hu
Lehet hogy beletelik egy kis időbe mre aktiv lessz:)))
és egy pár értelmes dolgot.
A cim tramp.uw.hu
Lehet hogy beletelik egy kis időbe mre aktiv lessz:)))
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 27, 01:24
Írta: 000000000 Dátum 2005 december 27, 01:24
Akkor mondanám hogy kb 5-perc után megált a feltöltés ez a uw. egy nagy car kinlodok kb vagy két órája de kakuto. Tiszta szégyen.
UW legyen veled!
UW legyen veled!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 27, 08:26
Írta: 000000000 Dátum 2005 december 27, 08:26
Egybe, betömörítve küld el mailben (25MB-tól kisseb?) és én feltöltöm a Tárház I.-be a Doksik közé!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 27, 09:26
Írta: 000000000 Dátum 2005 december 27, 09:26
44Mb becsomagolva.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 27, 09:29
Írta: 000000000 Dátum 2005 december 27, 09:29
Az sok. Sajnálom! Majd valamit kitalálunk...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 27, 09:31
Írta: 000000000 Dátum 2005 december 27, 09:31
Nem lehet különválasztani az érdekesebb infókat (pl. csak a léptőmotorokról szóló részt)?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 27, 11:31
Írta: 000000000 Dátum 2005 december 27, 11:31
Akkor aszt elküldöm azmég belefér 25Mb-ba.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 27, 11:54
Írta: 000000000 Dátum 2005 december 27, 11:54
Ok!
Cím: Re:Léptetőmotor
Írta: fs9s63xkf Dátum 2005 december 27, 13:22
Írta: fs9s63xkf Dátum 2005 december 27, 13:22
A www.q-tech.hu -n fent van az egész katalógus kölön motorokra és vezérlőkre bontva.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2005 december 27, 13:45
Írta: 000000000 Dátum 2005 december 27, 13:45
Végül is így van! Onnét letölthető!
Cím: Re:Léptetőmotor
Írta: Bicska Dátum 2005 december 28, 19:54
Írta: Bicska Dátum 2005 december 28, 19:54
Köszönök mindenkinek mindent[#vigyor2]!!
Bicska
Bicska
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 01, 12:07
Írta: 000000000 Dátum 2006 január 01, 12:07
Szereztem egy Sanyo Denki motort de az adtlapja levan kopva teljesen és igy sajna nemtudom hogy a motor kb hány voltos lehet és hány lépéses.
Valahogy eszt kilehetne számolni?
A súlya 1.5Kg 4-kivezetéses és a tekercsek vastagsága ahogy lebirtam mérni kb 0.5mm,ezekböl kilehetne számolni?
Üdv.: zoli
BÚÉK.
Valahogy eszt kilehetne számolni?
A súlya 1.5Kg 4-kivezetéses és a tekercsek vastagsága ahogy lebirtam mérni kb 0.5mm,ezekböl kilehetne számolni?
Üdv.: zoli
BÚÉK.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 01, 15:51
Írta: 000000000 Dátum 2006 január 01, 15:51
Keríteni kell egy rézhuzalok terhelhetősége az átmérő (esetleg keresztmetszet) fügvényében táblázatot (tankönyvekben, szabványokban, tekercselési táblázatokban találhatóak), amiből kiolvashatod a 0.5mm-es huzal terhelhetőségét (tekercsben)! Ekkor meg lesz az áramérték (kb.), majd meg méred a tekercs ellenállását és U=I×R -ből kijön a motor alapfeszültsége. A felbontása nagyvalószínüséggel 1.8°-os, de esetleg le is számolhatod, ha van kedved hozzá!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 01, 15:51
Írta: 000000000 Dátum 2006 január 01, 15:51
Természetesen bipoláris a motorod (4 kivezetéssel).
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 01, 16:06
Írta: 000000000 Dátum 2006 január 01, 16:06
Hozzávetölegesen nemtudod megmondani hogy hány Voltos és Amper lehet.kb:))
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 01, 17:30
Írta: 000000000 Dátum 2006 január 01, 17:30
Az említett adatok nélkül nem!
Cím: Re:Léptetőmotor
Írta: SquirrelTech Dátum 2006 január 01, 18:13
Írta: SquirrelTech Dátum 2006 január 01, 18:13

Forrást nem írok.
Az emlíett 2.5 A/mm2 áramsűrűség trafóknál használt érték. Ha jobb a tekercs hűtése, akkor ez az érték egy nagyon kicsit lehet magasabb is.
Arra vigyázz, hogy a zománc is növeli az átmérőt, a valós réz átmérő valamivel kisebb a mértnél.
A "zománzozott" oszlopban 1.2 mm-től felfelé durva elírás van ... A többi érték viszont jónak tűnik. Ha találok esetleg jobb táblázatot, akkor cserélem.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 01, 18:42
Írta: 000000000 Dátum 2006 január 01, 18:42
Azért azt hozzáteszem még, hogy a huzal átmérőjét ne tolómérővel mérd meg (mikrométerrel illik)!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 01, 18:47
Írta: 000000000 Dátum 2006 január 01, 18:47
Kiszámolná valaki mert eszt nemegészen értem:(
A tekercsek ellenálását lemérlyem?
A tekercsek ellenálását lemérlyem?
Cím: Re:Léptetőmotor
Írta: SquirrelTech Dátum 2006 január 01, 19:31
Írta: SquirrelTech Dátum 2006 január 01, 19:31
Ohm törvénye röviden: R=U/I.
Ha ezt átrendezed: U=I*R.
I -> kiolvasod abból a táblázatból (5. oszlop);
R -> megméred ohmmérővel;
U -> az a fesz, amit a tekercsre kapcsolhatsz úgy, hogy a huzalra megengedett legnagyobb áramerősség follyon.
Ha ezt átrendezed: U=I*R.
I -> kiolvasod abból a táblázatból (5. oszlop);
R -> megméred ohmmérővel;
U -> az a fesz, amit a tekercsre kapcsolhatsz úgy, hogy a huzalra megengedett legnagyobb áramerősség follyon.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 01, 19:48
Írta: 000000000 Dátum 2006 január 01, 19:48
A tekercs ellenálása 1-ohm most eszt kell megszoroznom 0,528-al?
Bocsi de hülyevagyok ehez.
Bocsi de hülyevagyok ehez.
Cím: Re:Léptetőmotor
Írta: SquirrelTech Dátum 2006 január 01, 20:36
Írta: SquirrelTech Dátum 2006 január 01, 20:36
6. oszlopot nézted, a terhelhetőség az 5.-ben van (0.490 A).
Viszont így valami tényleg nem jó, mert 0.5 V lenne a motorod névleges feszültsége (ezt pedig kizártnak tartom).
Teljesen biztos az az 1 Ohm?? És az a ~0.5 mm? :)
Megvizsgáltam egy Sanyo motoron én is most ezt az egészet. A ráírt / mért paraméterek szerint számolva gyakorlatban is eléggé közelítenek egymáshoz az eredmények. (3.8 Ohm - 3.5 V - 0.95 A)
Viszont így valami tényleg nem jó, mert 0.5 V lenne a motorod névleges feszültsége (ezt pedig kizártnak tartom).
Teljesen biztos az az 1 Ohm?? És az a ~0.5 mm? :)
Megvizsgáltam egy Sanyo motoron én is most ezt az egészet. A ráírt / mért paraméterek szerint számolva gyakorlatban is eléggé közelítenek egymáshoz az eredmények. (3.8 Ohm - 3.5 V - 0.95 A)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 01, 20:57
Írta: 000000000 Dátum 2006 január 01, 20:57
0.55mm a tekercs pontosan lemértem mikroval
tehát 0.600*1=0,6Volt
Valami nem oké.
Pedig 1-ohm az ellenálása.
tehát 0.600*1=0,6Volt
Valami nem oké.
Pedig 1-ohm az ellenálása.
Cím: Re:Léptetőmotor
Írta: SquirrelTech Dátum 2006 január 01, 21:24
Írta: SquirrelTech Dátum 2006 január 01, 21:24
Hát innentől kezdve nem nagyon van ötletem...[#nemtudom]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 02, 08:57
Írta: 000000000 Dátum 2006 január 02, 08:57
Szerintem az Ohm mérésed pontatlan lehet. Ezek az egyszerübb multiméterek nem pontosak és elég jó felbontásuak 1~2 Ohm-os tartományban. Ide inkább Whestone (lehet, hogy nem pontosan írom) híd kellene!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 02, 08:59
Írta: 000000000 Dátum 2006 január 02, 08:59
Az meg mi?
Most akkor eszt a motort pár voltal kellene hajtani?
Most akkor eszt a motort pár voltal kellene hajtani?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 02, 15:44
Írta: 000000000 Dátum 2006 január 02, 15:44
Magyarúl az az Ohm érték amit Te mérsz, nem hihető (túl kevés)! Ha tudsz, agy neki DC tápból egy pontosan mért feszültséget (pl. 12V-ot) és egy Amper mérővel mérd meg az így átfolyó áramot (közbe nem árt, ha a feszültséget is ellenőrzöd), így már számolható a tényleges ellenállás R=U/I (mindig a mért értékből dolgozz)!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 02, 17:39
Írta: 000000000 Dátum 2006 január 02, 17:39
Szerintem meg jólmértem mert a másik motorra 3.8ohm van irna aszt lemértem és a müszeris anyit mutatott.
Nemértem[#falbav]
Nemértem[#falbav]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 02, 17:49
Írta: 000000000 Dátum 2006 január 02, 17:49
Nézted mind a 2 tekercset? Szimetrikus?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 02, 18:10
Írta: 000000000 Dátum 2006 január 02, 18:10
igen midkettő 1ohm
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 02, 18:10
Írta: 000000000 Dátum 2006 január 02, 18:10
igen midkettő 1ohm
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 02, 18:46
Írta: 000000000 Dátum 2006 január 02, 18:46
[#fejvakaras]Egyenlőre akkor nem tudom...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 04, 11:52
Írta: 000000000 Dátum 2006 január 04, 11:52
Ugyanazzal a muszerrel merted? Digi cuccok 1kHz koruli frekivel mintaveteleznek, ez nagyobb induktivitasu tekercsnel zavaro! Valamint feszultsegmeresre sem a legjobbak, ha DC-t mersz es nem jol szurt, akkor fals erteket kapsz. (es akkor is bibi van, ha gyenge a muszered tapja/eleme)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 04, 13:31
Írta: 000000000 Dátum 2006 január 04, 13:31
Egy müszerrel mértem igaz az ellem szerintem már gyenge benne lehet hogy ez a baj?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 04, 19:24
Írta: 000000000 Dátum 2006 január 04, 19:24
Az átlagos multiméterek 10ohm-os tartomány alatt pontatlanok. 10ohm alatt azonban a Wheatstone-híd is használata is hibás, a hozzávezetések ellenállása miatt. Tehát a Thomson-híd használata célszerű, viszont ez is (akárcsak) a Wheatstone-híd precíziós ellenállásokat igényel... gondolom az meg nincs.
Marad a feszültségösszehasonlításos módszer. Ennek lényege, hogy egy áramgenerátorral fix áramot hajtunk át előbb egy ismert ellenálláson és mérjük a rajta eső feszültséget, majd ugyanolyan körülmények között (azonos kábelhosz, stb) megnézzük az ismeretlen ellenálláson eső feszt is. Az ismeretlen ellenállást az Rx=Rn×(Ux/Un) összefüggésből számolhatjuk, ahol Rx az ismeretlen ellenállás, Rn a normálellenállás, Ux az ismeretlen ellenálláson eső fesz, Un az ismert ellenálláson eső fesz.
Illetve ugyanezen az elven ott van még az áram összehasonlításos módszer.
Marad a feszültségösszehasonlításos módszer. Ennek lényege, hogy egy áramgenerátorral fix áramot hajtunk át előbb egy ismert ellenálláson és mérjük a rajta eső feszültséget, majd ugyanolyan körülmények között (azonos kábelhosz, stb) megnézzük az ismeretlen ellenálláson eső feszt is. Az ismeretlen ellenállást az Rx=Rn×(Ux/Un) összefüggésből számolhatjuk, ahol Rx az ismeretlen ellenállás, Rn a normálellenállás, Ux az ismeretlen ellenálláson eső fesz, Un az ismert ellenálláson eső fesz.
Illetve ugyanezen az elven ott van még az áram összehasonlításos módszer.
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2006 január 06, 09:17
Írta: e3h0cv4ph Dátum 2006 január 06, 09:17
Sziasztok! Új vagyok a listán de lenne egy kérdésem. Egy CNC faesztergát építek és a keresztirányú mozgatás mechanizmusát nehezen viszi a léptetőmotor (gyakran ugrik. Hogyan lehetne hozzájutni egy nagyobb teljesítményű léptetőmotorhoz. A jelenlegi motor 5V mellett kb 1A-t vesz fel (álló helyzetben).A weblapon lévőket néztem de azok is kicsinek bizonyulnak. Előre is köszi a segítséget. Tatai Tamás
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2006 január 06, 09:52
Írta: D.Laci Dátum 2006 január 06, 09:52
Ne azt nézd hogy milyen feszültségü meg mekora az áram felvétele! Tartó nyomatékot , ill ha van publikálva forgató nyómatékot kel nézni!!
Cím: Re:Léptetőmotor
Írta: f6kuxbs9f Dátum 2006 január 06, 12:21
Írta: f6kuxbs9f Dátum 2006 január 06, 12:21
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 14, 20:42
Írta: 000000000 Dátum 2006 január 14, 20:42
Sziasztok,
Lenne egy olyan kérdésem, hogy milyen sebességeket tudtok elérni. Beszereztem 3 db 9Nm-es motort, mert a mechanikám elég nagy. 4.5A/phase 24V-al 4mm menetemelkedésű orsóval a mach2-t 40 unit/sec-ig tudom felcsavarni. Ez elvileg 2,4 m/perc. Az oldalon a 9-es, Kémeri József álltal készített gép 18 m/perc-et tud ? Valamit elrontottam ?
Üdv:
Rusi
Lenne egy olyan kérdésem, hogy milyen sebességeket tudtok elérni. Beszereztem 3 db 9Nm-es motort, mert a mechanikám elég nagy. 4.5A/phase 24V-al 4mm menetemelkedésű orsóval a mach2-t 40 unit/sec-ig tudom felcsavarni. Ez elvileg 2,4 m/perc. Az oldalon a 9-es, Kémeri József álltal készített gép 18 m/perc-et tud ? Valamit elrontottam ?
Üdv:
Rusi
Cím: Re:Léptetőmotor
Írta: f6kuxbs9f Dátum 2006 január 15, 07:18
Írta: f6kuxbs9f Dátum 2006 január 15, 07:18
Sziasztok!
Azon 6 mm-es emelkedésű orsók vannak, de ez önmagában nem indokolja ezt a különbséget.
Üdv
Azon 6 mm-es emelkedésű orsók vannak, de ez önmagában nem indokolja ezt a különbséget.
Üdv
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 15, 08:55
Írta: 000000000 Dátum 2006 január 15, 08:55
Hány Voltos a motor és mennyiről hajtod?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 15, 16:18
Írta: 000000000 Dátum 2006 január 15, 16:18
Sziasztok
A motor 4,5V -os 1 ohm 4,5 A/fázis 9 Nm. Próbáltam 12, 24, most 55-ről megy. Így a leggyorsabb......
Üdv:
Rusi
A motor 4,5V -os 1 ohm 4,5 A/fázis 9 Nm. Próbáltam 12, 24, most 55-ről megy. Így a leggyorsabb......
Üdv:
Rusi
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 15, 18:25
Írta: 000000000 Dátum 2006 január 15, 18:25
Jó, hogy be lehet állítani a PWM-et. elvileg 3-4×-es túlhajtásra lett méretezve (vezérelt PWM).
A motorokból kiszethető max. fordulatszám nagyon típusfüggő! Igen szélsőséges esetekkel találkoztam már!
A motorokból kiszethető max. fordulatszám nagyon típusfüggő! Igen szélsőséges esetekkel találkoztam már!
Cím: Re:Léptetőmotor
Írta: Bicska Dátum 2006 január 15, 20:07
Írta: Bicska Dátum 2006 január 15, 20:07
Hello Rusi!
Ez mire vonatkozik?: "Próbáltam 12, 24, most 55-ről megy. Így a leggyorsabb...... "
55V-ról hajtod?
Ez mire vonatkozik?: "Próbáltam 12, 24, most 55-ről megy. Így a leggyorsabb...... "
55V-ról hajtod?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 15, 23:16
Írta: 000000000 Dátum 2006 január 15, 23:16
Gondolom feszültségben érti...
A probléma oka a beállításokban van, mégpedig a PWM kitöltési tényezőjének beállításával. A használt feszültség túl nagy a motorodhoz. 12V és 18V közötti feszültségű tápot használj!
Ahhoz, hogy megértsd a vezérlő működését, tudnod kell mi az a PWM (Pulse Width Modulation, azaz impulzusszélesség moduláció).
A PWM lényegében a legegyszerűbb digital-analog átalakító. Tulajdonságait a pwm frekvenciája, és kitöltési tényezője határozza meg. A kitöltési tényezővel a jel középértékét szabályozhatjuk, ami aztán arányos lesz a fogyasztón átfolyó árammal.
Egy egyszerű képlet a PWM kimenetén megjelenő feszültség számításához: Uki=Ube×(W/T) Uki a PWM kimenetén megjelenő jel középértéke, Ube a modulálandó feszültség szint, W az az időtartam, ami alatt a Ube Uki-re van kapcsolva, T a periódusidő (T=1/freq). Tehát egy adott periódusidejű jellel osztjuk a bekapcsolás idejét (kitöltési tényező), majd szorozzuk a bemenő feszültséggel, és megkapjuk a kimeneten megjelenő jel középértékét.
Az ohm tv. -ből kiindulva 55V esetén az 1ohm-os tekercsen 55A!!!-nek kell folynia. Mivel a vezérlő PWM-et használ ez az 55V csak nagyon kis pillanatig esik a tekercsen, mivel T1 kitöltési tényező kicsi. Viszont ott van, ami magasabb fordulatszámon a tekercs induktív volta miatt ellenkező irányú mágneses mezőt hoz létre, ami fékezi a motort. A feszültséget csökkentve csökken a fékezőerő, de ekkor növelni kell a kitöltési tényezőt, konkrétan azt az időt amíg a tápfesz a motorra van kapcsolva. Ekkor a jel középértéke nől, ezzel arányosan a motor áram is, de mivel alacsonyabb feszről jár a motor, kisebb mágneses erő fogja fékezni a motort. Ezáltal nagyobb fordulatszám érhető el.
Nagyjából ennyi...
A probléma oka a beállításokban van, mégpedig a PWM kitöltési tényezőjének beállításával. A használt feszültség túl nagy a motorodhoz. 12V és 18V közötti feszültségű tápot használj!
Ahhoz, hogy megértsd a vezérlő működését, tudnod kell mi az a PWM (Pulse Width Modulation, azaz impulzusszélesség moduláció).
A PWM lényegében a legegyszerűbb digital-analog átalakító. Tulajdonságait a pwm frekvenciája, és kitöltési tényezője határozza meg. A kitöltési tényezővel a jel középértékét szabályozhatjuk, ami aztán arányos lesz a fogyasztón átfolyó árammal.
Egy egyszerű képlet a PWM kimenetén megjelenő feszültség számításához: Uki=Ube×(W/T) Uki a PWM kimenetén megjelenő jel középértéke, Ube a modulálandó feszültség szint, W az az időtartam, ami alatt a Ube Uki-re van kapcsolva, T a periódusidő (T=1/freq). Tehát egy adott periódusidejű jellel osztjuk a bekapcsolás idejét (kitöltési tényező), majd szorozzuk a bemenő feszültséggel, és megkapjuk a kimeneten megjelenő jel középértékét.
Az ohm tv. -ből kiindulva 55V esetén az 1ohm-os tekercsen 55A!!!-nek kell folynia. Mivel a vezérlő PWM-et használ ez az 55V csak nagyon kis pillanatig esik a tekercsen, mivel T1 kitöltési tényező kicsi. Viszont ott van, ami magasabb fordulatszámon a tekercs induktív volta miatt ellenkező irányú mágneses mezőt hoz létre, ami fékezi a motort. A feszültséget csökkentve csökken a fékezőerő, de ekkor növelni kell a kitöltési tényezőt, konkrétan azt az időt amíg a tápfesz a motorra van kapcsolva. Ekkor a jel középértéke nől, ezzel arányosan a motor áram is, de mivel alacsonyabb feszről jár a motor, kisebb mágneses erő fogja fékezni a motort. Ezáltal nagyobb fordulatszám érhető el.
Nagyjából ennyi...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 16, 18:42
Írta: 000000000 Dátum 2006 január 16, 18:42
sziasztok, tudnátok felvilágositást adni hogy mik az elönyei illetve hátrányai a léptetömotornak a DC-s szervoval szemben ?
Cím: Re:Léptetőmotor
Írta: Bicska Dátum 2006 január 16, 19:08
Írta: Bicska Dátum 2006 január 16, 19:08
Hazudnék, ha azt mondanám, hogy most már világos[#guluszem1][#nyes], de azért már látom a fényt az alagút végén..Csak azért kérdeztem rá, mert elsőre furcsának tűnt, hogy 4x-es feszen hajtja a motorokat és azok bírják..
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 16, 19:11
Írta: 000000000 Dátum 2006 január 16, 19:11
Ha visszaolvasol, megtalálod. Volt már szó erről.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 16, 19:12
Írta: 000000000 Dátum 2006 január 16, 19:12
Ennél jobban már nem tudom leírni, de azért örülök a fénynek! :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 16, 19:44
Írta: 000000000 Dátum 2006 január 16, 19:44
Sziasztok,
Ok köszi a választ.Ez világos.A PWM
Ok köszi a választ.Ez világos.A PWM
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 16, 20:03
Írta: 000000000 Dátum 2006 január 16, 20:03
Bocs a gyerek elküldte....
Akkor vissza 12 V-ra ?
Így szerinted milyen fordulatra lehet számítani ?
Tudom, hogy ez sok mindentől függ. Csak úgy KB.. 2-3 ezer /perc ? Vagy csak 500 - 600 ?
Miket sikerült elérnetek ?
Előre is köszi...
Üdv:
Rusi
Akkor vissza 12 V-ra ?
Így szerinted milyen fordulatra lehet számítani ?
Tudom, hogy ez sok mindentől függ. Csak úgy KB.. 2-3 ezer /perc ? Vagy csak 500 - 600 ?
Miket sikerült elérnetek ?
Előre is köszi...
Üdv:
Rusi
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 16, 22:26
Írta: 000000000 Dátum 2006 január 16, 22:26
Sziasztok,
Még egy kérdésem lenne. A profi firmware-nél 30 kHz alapú a pwm (0,000033 1/s). Ez azt jeleni, hogy a T1-el beállított érték mondjuk 50 akkor 50*0.000033s lesz a bekapcsolás ideje, vagy 0.000033 a teljes idő amiből 50/255 rész alatt, tehát 0.0000064 s van csak bekapcsolva ?
Ez csak azért érdekel, mert ha az első variáció az igaz, akkor a tekercsenkénti bekapcsolás ideje 0,00165 tehát egy másodperc alatt max 606-ot tud a vezérlő léptetni. Tehát minél nagyobb a T1 annál kevesebb a másodpercenkénti lépésszám. Ebben az esetben nem csak a motor, hanem eleve a vezérlő is bekorlátozza a max sebességet. A második esetben ez indiferens, mivet a periódusidő nem változik, tehát a max lépésszám amit a vezérlő le tud generálni, függetlenül a motortól 1/0.000033 tehát 30000.
Üdv:
Rusi
Még egy kérdésem lenne. A profi firmware-nél 30 kHz alapú a pwm (0,000033 1/s). Ez azt jeleni, hogy a T1-el beállított érték mondjuk 50 akkor 50*0.000033s lesz a bekapcsolás ideje, vagy 0.000033 a teljes idő amiből 50/255 rész alatt, tehát 0.0000064 s van csak bekapcsolva ?
Ez csak azért érdekel, mert ha az első variáció az igaz, akkor a tekercsenkénti bekapcsolás ideje 0,00165 tehát egy másodperc alatt max 606-ot tud a vezérlő léptetni. Tehát minél nagyobb a T1 annál kevesebb a másodpercenkénti lépésszám. Ebben az esetben nem csak a motor, hanem eleve a vezérlő is bekorlátozza a max sebességet. A második esetben ez indiferens, mivet a periódusidő nem változik, tehát a max lépésszám amit a vezérlő le tud generálni, függetlenül a motortól 1/0.000033 tehát 30000.
Üdv:
Rusi
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 16, 23:46
Írta: 000000000 Dátum 2006 január 16, 23:46
30kHZ esetén a periódusidő 0,000033sec. A kitöltési tényező értékét százalékban kell érteni. Ha ez 50, akkor a periódusidő 50%-ában van bekapcsolva, vagyis a bekapcsolás időtartama 0,000016666sec. (ugyanennyi ideig van kikapcsolva) Bekapcsolás + kikapcsolás időtartam = periódusidő.
A vezérlő konfigurációs programja (PWM manager), nem százalékban dolgozik. (lehet jobb lett volna beépíteni a programba ilyesfajta értékadást, de ez nem az én reszortom).
A PWM manager-ben beállítható érték 255-ig van. Ez a 0-t is beleszámolva 256. Ezt az érték abból adódik, hogy a PIC-ben a kitöltési tényező beállítására egy 8bites változót használunk (2^8=256). Namármost, amikor a setupban 255-t állítasz be, akkor számláló minden alkalommal tulcsordul (a kimeneti átlag 255/256 lesz), ha 0-t akkor sosem csordul túl. Amikor 50-re állítod, akkor 50-szer fog túlcsordulni, tehát a kimeneti átlag 50/256 lesz. Ez az átlag felel meg a kitoltési tényezőnek. Vagyis a 256 ciklusnyi periódusidőből 50 ciklus lesz magas értéken. Ez pedig kb. 19,5%-os kitöltési tényezőt ad. Így 12V esetén 2,3V-os középértékű jelet kapsz.
Második kérdésedre a válasz: a léptetések maximális száma nem függ a T1 értéktől, csak a periódusiőtől. Ami azthiszem jócskán elég... 30kHz = 30000Hz, vagyis 30000lépés/másodperc, persze csak elméletben... egyéb nem részletezendő okok miatt a vezérlő valójában 13000imp/s-re képes. Ez percenként 780000 impulzus, ami egy 1,8°-os lépésű motort egész lépéssel hajtva 3900RPM-et eredményez (fél lépéssel 1950RPM). Azthiszem ez bőven kielégítő, hiszen a léptetőmotorok többsége el sem tudja érni ezt a fordulatszámot kellő nyomatékkal.
Remélem sikerült mindenben választ adni... Túl nagy sebességre ne számíts, a léptetőmotorok nyomatéka a fordulatszám növekedésével drasztikusan csökken, ezáltal a lépésvesztésből adódó hiba is megnől. Cserébe alacsony fordulaton is nagy nyomatékot ad. Gyors, nagy nyomatékú mozgásokhoz szervo motor dukál.
Valódi maximális fordulatszám (ill. mozgatási sebességet) azért nem tudok írni, mert ez nagyban függ a motorodtól is. Ajánlom a kisérletezgetést, és nézz utána a rotor-inerciának... utóbbiról is volt itt szó.
A vezérlő konfigurációs programja (PWM manager), nem százalékban dolgozik. (lehet jobb lett volna beépíteni a programba ilyesfajta értékadást, de ez nem az én reszortom).
A PWM manager-ben beállítható érték 255-ig van. Ez a 0-t is beleszámolva 256. Ezt az érték abból adódik, hogy a PIC-ben a kitöltési tényező beállítására egy 8bites változót használunk (2^8=256). Namármost, amikor a setupban 255-t állítasz be, akkor számláló minden alkalommal tulcsordul (a kimeneti átlag 255/256 lesz), ha 0-t akkor sosem csordul túl. Amikor 50-re állítod, akkor 50-szer fog túlcsordulni, tehát a kimeneti átlag 50/256 lesz. Ez az átlag felel meg a kitoltési tényezőnek. Vagyis a 256 ciklusnyi periódusidőből 50 ciklus lesz magas értéken. Ez pedig kb. 19,5%-os kitöltési tényezőt ad. Így 12V esetén 2,3V-os középértékű jelet kapsz.
Második kérdésedre a válasz: a léptetések maximális száma nem függ a T1 értéktől, csak a periódusiőtől. Ami azthiszem jócskán elég... 30kHz = 30000Hz, vagyis 30000lépés/másodperc, persze csak elméletben... egyéb nem részletezendő okok miatt a vezérlő valójában 13000imp/s-re képes. Ez percenként 780000 impulzus, ami egy 1,8°-os lépésű motort egész lépéssel hajtva 3900RPM-et eredményez (fél lépéssel 1950RPM). Azthiszem ez bőven kielégítő, hiszen a léptetőmotorok többsége el sem tudja érni ezt a fordulatszámot kellő nyomatékkal.
Remélem sikerült mindenben választ adni... Túl nagy sebességre ne számíts, a léptetőmotorok nyomatéka a fordulatszám növekedésével drasztikusan csökken, ezáltal a lépésvesztésből adódó hiba is megnől. Cserébe alacsony fordulaton is nagy nyomatékot ad. Gyors, nagy nyomatékú mozgásokhoz szervo motor dukál.
Valódi maximális fordulatszám (ill. mozgatási sebességet) azért nem tudok írni, mert ez nagyban függ a motorodtól is. Ajánlom a kisérletezgetést, és nézz utána a rotor-inerciának... utóbbiról is volt itt szó.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 17, 00:03
Írta: 000000000 Dátum 2006 január 17, 00:03
na visszaolvastam a szervo motorokrol nem sok szo esik, végülis arra lennék valojában kiváncsi hogy a léptetömotor jobb e valamiben a szervonál
Cím: Re:Léptetőmotor
Írta: pn76ruzzi Dátum 2006 január 17, 00:11
Írta: pn76ruzzi Dátum 2006 január 17, 00:11
Szia!
Igen!
Olcsóbb, könnyebben beszerezhető. Amúgy nem. :-)
dzsolt
Igen!
Olcsóbb, könnyebben beszerezhető. Amúgy nem. :-)
dzsolt
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 17, 00:11
Írta: 000000000 Dátum 2006 január 17, 00:11
Hát részben Te is kaptál választ az előző hozzászólásom végén.
Egyébként igazad van. Sajnos a téma ami ezzel foglalkozott (nem részletezendő okok miatt) törölve lett.
Léptetőmotor előnyei: könnyű pozicióban tartás, nagy nyomaték alacsony fordulaton, könnyű vezérlés.
Léptetőmotor hátrányai: magas fordulaton csökkenő nyomaték, kvantált elmozdulás (többnyire 1,8°/step), vezérlés nélkül egyáltalán nem megy.
Servo motor előnyei: magasabb fordulatra képes, gyorsan eléri a max fordulatszámát, a vezérlésből (ami már inkább szabályozás) adódóan a mozgása akár folyamatos is lehet (függ az enkódertől). Vezérlés nélkül is működik.
Servo motor hátrányai: alacsony fordulaton kis nyomaték, nehezebb pozícióban tartás és pozicionálás (enkóder nélkül nem lehetséges), komolyabb szabályozást igényel.
Most ennyi jutott eszembe, remélem megfelel.
ÜDV
Egyébként igazad van. Sajnos a téma ami ezzel foglalkozott (nem részletezendő okok miatt) törölve lett.
Léptetőmotor előnyei: könnyű pozicióban tartás, nagy nyomaték alacsony fordulaton, könnyű vezérlés.
Léptetőmotor hátrányai: magas fordulaton csökkenő nyomaték, kvantált elmozdulás (többnyire 1,8°/step), vezérlés nélkül egyáltalán nem megy.
Servo motor előnyei: magasabb fordulatra képes, gyorsan eléri a max fordulatszámát, a vezérlésből (ami már inkább szabályozás) adódóan a mozgása akár folyamatos is lehet (függ az enkódertől). Vezérlés nélkül is működik.
Servo motor hátrányai: alacsony fordulaton kis nyomaték, nehezebb pozícióban tartás és pozicionálás (enkóder nélkül nem lehetséges), komolyabb szabályozást igényel.
Most ennyi jutott eszembe, remélem megfelel.
ÜDV
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 17, 00:23
Írta: 000000000 Dátum 2006 január 17, 00:23
köszi az infót
fa marására használom a gépemet, ami lassu mozgással megy általában tehát a nyomaték miatt nekem jobb a léptetömotor?
fa marására használom a gépemet, ami lassu mozgással megy általában tehát a nyomaték miatt nekem jobb a léptetömotor?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 17, 00:39
Írta: 000000000 Dátum 2006 január 17, 00:39
Így van!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 22, 19:40
Írta: 000000000 Dátum 2006 január 22, 19:40
bocsi, nem a myomatek miatt jobb a leptetomoci... kizarolag a penztarcad miatt!!!
Egyetlen elonye a szervoval szemben az olcsosaga, meg a gagyi meghajtasa. Viszont ez igencsak nagy elony :) Mindenki csak azert szereti (magamat is beleertve), mert sokkal erthetobb a vezerlese, hajtasa, logikaja, mint a szervonak.
Egyetlen elonye a szervoval szemben az olcsosaga, meg a gagyi meghajtasa. Viszont ez igencsak nagy elony :) Mindenki csak azert szereti (magamat is beleertve), mert sokkal erthetobb a vezerlese, hajtasa, logikaja, mint a szervonak.
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2006 január 25, 17:32
Írta: D.Laci Dátum 2006 január 25, 17:32
István dobtam egy e-mailt az 5 "mikroma FA 34-4-2" motor ügyében.
Cím: Re:Léptetőmotor
Írta: 3vv2btrhv Dátum 2006 január 26, 16:21
Írta: 3vv2btrhv Dátum 2006 január 26, 16:21
Szia vers.
Ha szabadna megkérdeznem mijen fával dolgozol és mit készitessz,,?
Tibor
Ha szabadna megkérdeznem mijen fával dolgozol és mit készitessz,,?
Tibor
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 26, 16:59
Írta: 000000000 Dátum 2006 január 26, 16:59
öszintén megmondva még semmivel )
mert pár hete vettem a gépet de még nincs rajt maromotor
a tervem az hogy réz fogantyukat marok, meg faragáshoz hasonlo dolgokat tömörfába (töltgyfa)
mert pár hete vettem a gépet de még nincs rajt maromotor
a tervem az hogy réz fogantyukat marok, meg faragáshoz hasonlo dolgokat tömörfába (töltgyfa)
Cím: Re:Léptetőmotor
Írta: pn76ruzzi Dátum 2006 január 26, 17:46
Írta: pn76ruzzi Dátum 2006 január 26, 17:46
Sziasztok!
Vettem léptecseket, de szinte semmi infót nem tudok róla.
STH-55D326
150452 Rev A
Shinano Kenshi Co. Ltd. JAPAN
Ennyi az össz infó. Sima multiméterrel 1,6 ohmosak a tekrencek, és 8 vezetékes. Kb fél kiló darabja (picit több, mert a posta szerint 1650 gramm a 3db) Vezérlőm még nincsen, egyenlőre azt szeretném, ha a mechanika állna össze, de közben mikor felhúzom magam, akkor kézbe veszem a motorokat is :-)
Kérdések:
Mennyire megbízhatóak az olcsó kategóriás multiméterek ilyen kis ellenállás mérésére?
Perpill a Pisti féle vezérlőből valami nagyon régi van a PIC-be égetve, nem is forszírozom még a megépítését, de mit javasoltok egyszerű próba áramkörnek, hogy kikeressem a tekercs párokat?
dzsolt
Vettem léptecseket, de szinte semmi infót nem tudok róla.
STH-55D326
150452 Rev A
Shinano Kenshi Co. Ltd. JAPAN
Ennyi az össz infó. Sima multiméterrel 1,6 ohmosak a tekrencek, és 8 vezetékes. Kb fél kiló darabja (picit több, mert a posta szerint 1650 gramm a 3db) Vezérlőm még nincsen, egyenlőre azt szeretném, ha a mechanika állna össze, de közben mikor felhúzom magam, akkor kézbe veszem a motorokat is :-)
Kérdések:
Mennyire megbízhatóak az olcsó kategóriás multiméterek ilyen kis ellenállás mérésére?
Perpill a Pisti féle vezérlőből valami nagyon régi van a PIC-be égetve, nem is forszírozom még a megépítését, de mit javasoltok egyszerű próba áramkörnek, hogy kikeressem a tekercs párokat?
dzsolt
Cím: Re:Léptetőmotor
Írta: 3vv2btrhv Dátum 2006 január 26, 17:47
Írta: 3vv2btrhv Dátum 2006 január 26, 17:47
a fafaragásban tudnánk együtmüködni én full eben a témában vagyok
Tibor
Tibor
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 26, 17:51
Írta: 000000000 Dátum 2006 január 26, 17:51
mennyire melegedhet egy motor alaphelyzetben?mert most allig lehet megfogni!sőt!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 26, 18:17
Írta: 000000000 Dátum 2006 január 26, 18:17
A tartóági PWM hány %-os? 50% felé ne vidd, inkább kb. 30%-nál legyél!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 26, 18:21
Írta: 000000000 Dátum 2006 január 26, 18:21
Egy sima 4bites léptetőregisztert használva. Mondjuk 7499 egy ilyen IC.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 26, 18:21
Írta: 000000000 Dátum 2006 január 26, 18:21
tartóági:631.313Hz(50%)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 26, 18:54
Írta: 000000000 Dátum 2006 január 26, 18:54
Ha léptetéskor melegszik, csökknsd a T1-et (a hozzátartozót persze és mindig az előző, lementett értékekből indulj ki)! Olvasd el a Motortuning leírás, megfigyelési részét is!
A tartóágit esetleg leveheted 30~40%-ra.
A tartóágit esetleg leveheted 30~40%-ra.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 26, 19:12
Írta: 000000000 Dátum 2006 január 26, 19:12
köszönöm!igyekszem!:)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 január 26, 19:52
Írta: 000000000 Dátum 2006 január 26, 19:52
Ja és az ellenállás mérést már kiveséztük...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 04, 03:36
Írta: 000000000 Dátum 2006 február 04, 03:36
ezt az adatot hogy kell értelmezni (pontosan mit jelent? pl Nm-ben):
Holding Torque: 2,8Kg-cm
Holding Torque: 2,8Kg-cm
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 04, 03:43
Írta: 000000000 Dátum 2006 február 04, 03:43
és mit jelent a: Detend Torque
a torque az talán nyomatékot jelent, de milyen nyomatékot?
a torque az talán nyomatékot jelent, de milyen nyomatékot?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 04, 08:21
Írta: 000000000 Dátum 2006 február 04, 08:21
Használd átszámításra EZT . Az eredmény 2.8 kilogram centimeter = 0.274 586 2 newton meter. Holding torque = állvatartási nyomaték a névleges tartóárammal, Detend Torque = állvamaradási nyomaték árammentes állapotban.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 04, 10:30
Írta: 000000000 Dátum 2006 február 04, 10:30
köszönöm, sokkal okosabb lettem :-)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 13, 17:42
Írta: 000000000 Dátum 2006 február 13, 17:42
Valaki találkozott már 10-kivezetéses motorral?
Milyen vezérlővel lehet meghajtani?
Milyen vezérlővel lehet meghajtani?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 13, 17:48
Írta: 000000000 Dátum 2006 február 13, 17:48
Profi1 vezérlővel mükxik az ilyen 10-kivezetéses motor?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 13, 18:00
Írta: 000000000 Dátum 2006 február 13, 18:00
Hali!
Tramp: Probaltad kimerni, hogy hogy lehetnek benne a tekercsek osszekotve? Vagy 9 tekercs lehet benne egy kozos pontal. Vagy 5 tekercs es mind az 5 kulon kivezetve.
Biztos, hogy sima leptetomotor? Esetleg van benne valamilyen jelado is?
Tramp: Probaltad kimerni, hogy hogy lehetnek benne a tekercsek osszekotve? Vagy 9 tekercs lehet benne egy kozos pontal. Vagy 5 tekercs es mind az 5 kulon kivezetve.
Biztos, hogy sima leptetomotor? Esetleg van benne valamilyen jelado is?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 13, 18:25
Írta: 000000000 Dátum 2006 február 13, 18:25
Én még nem találkoztam 10 kivezetéses motorral. Szerintem is 5 tekercs minden vége ki lehet vezetve (5 fázisú motor lehet).
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 13, 18:26
Írta: 000000000 Dátum 2006 február 13, 18:26
Még nincs nálam hétvégére kerül hozám,akkor tudom kimérni.De elkébzelhető valahogy a bekötése?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 13, 18:29
Írta: 000000000 Dátum 2006 február 13, 18:29
Hát ha 5 fázisú, akkor sajnos a Profi1-el nem használható!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 13, 18:34
Írta: 000000000 Dátum 2006 február 13, 18:34
Ha ilyen? "Vagy 9 tekercs lehet benne egy kozos pontal." Ebben az esteben lehet?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 13, 18:37
Írta: 000000000 Dátum 2006 február 13, 18:37
Sajnos akkor sem! Cak 2 fázisú és unipoláris tekercsrendszerű motor használható!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 13, 18:40
Írta: 000000000 Dátum 2006 február 13, 18:40
Akkor aban reménykedek hogy van benne valmiféle jeladó és talán annak a vezetékei,legalábbis négy, majd kiderül.Köszi a segitséget[#wave]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 13, 19:07
Írta: 000000000 Dátum 2006 február 13, 19:07
Ha mégsincs benne jeladó vagy más kütyü, akkor a tekercsközösítés még mindég egy járható út. Persze sok sok türelem kell hozzá, ha próbálgatással akarod csinálni, de nem vészes.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 13, 19:17
Írta: 000000000 Dátum 2006 február 13, 19:17
Erről nics valami leirás vagy hogy érted a tekercsközösitést ha 5-fázisu.Két Két tekercset közösre kötöm vagy hogy?[#conf]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 13, 19:18
Írta: 000000000 Dátum 2006 február 13, 19:18
Pontosan hány kábel jön ki belőlle?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 13, 19:20
Írta: 000000000 Dátum 2006 február 13, 19:20
10. de kimérni csak a hétvégén tudom.Most csak tájékozodok:)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 13, 19:29
Írta: 000000000 Dátum 2006 február 13, 19:29
Hát... nem hinném, hogy minden egyes tekercs mindkét vége ki lenne vezetve. Talán 2közös van 4-4 tekercspárhoz (ez lenne a jó). Vagy 3közös a 3×2 tekercspárhoz (ez kevésbé jó). Viszont a motorba nyúlva még ez is megoldható. A lényeg, hogy a tekercsek száma páros legyen. Persze mindez a felbontás rovására megy.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 13, 19:29
Írta: 000000000 Dátum 2006 február 13, 19:29
van nekem egy sanyo denki típusú léptetőmotorom kellene rolla egy pár info ha tud valaki...
gy: Sanyo Denki
Típ: 103G775-2142
5.6V DC
0.6A
1,8 deg
Előre is köszi a segítséget!
gy: Sanyo Denki
Típ: 103G775-2142
5.6V DC
0.6A
1,8 deg
Előre is köszi a segítséget!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 13, 19:33
Írta: 000000000 Dátum 2006 február 13, 19:33
Ha megjön a motor majd kiméregetem adigis köszi.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 13, 19:38
Írta: 000000000 Dátum 2006 február 13, 19:38
nincsmit
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 16, 11:40
Írta: 000000000 Dátum 2006 február 16, 11:40
Kimértem a motor .Tehát 10 vezeték jönki belöle és 5 tekercs van benne 3.4Omh.Ezzel lehet valamit keznedi?Ja és igy van ráirva a felbontás 0.74/0.36° most ez akkor hány fokos?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 16, 11:59
Írta: 000000000 Dátum 2006 február 16, 11:59
Szerintem 0.74 fokos lehet egeszlepeses uzemmodban, es 0.36 fokos lehet fellepeses uzemmodban.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 16, 17:54
Írta: 000000000 Dátum 2006 február 16, 17:54
Ami a meghajtást illeti:
A gond, hogy a tekercsek száma páratlan (5 fázisú), így pl. a profi1-el hajtva 1 tekercs mindég kimarad. Persze ez nem azt jelenti, hogy el kéne dobnod. Viszonylag könnyen építhető hozzá meghajtó (8 bites szálálóval), akár pic-et használva.
A felbontása... egésszen véletlenül nem 0,72/0,36°? Ugyanis így jönne ki az 5 tekercs (360/72=5) vagyis teljes lépésben 500 imp./ford. (minden tekercs 100× gerjesztve). 0.36 fél lépés (1000imp./ford.)
A gond, hogy a tekercsek száma páratlan (5 fázisú), így pl. a profi1-el hajtva 1 tekercs mindég kimarad. Persze ez nem azt jelenti, hogy el kéne dobnod. Viszonylag könnyen építhető hozzá meghajtó (8 bites szálálóval), akár pic-et használva.
A felbontása... egésszen véletlenül nem 0,72/0,36°? Ugyanis így jönne ki az 5 tekercs (360/72=5) vagyis teljes lépésben 500 imp./ford. (minden tekercs 100× gerjesztve). 0.36 fél lépés (1000imp./ford.)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 16, 18:25
Írta: 000000000 Dátum 2006 február 16, 18:25
Valoba 0.72/0.36°.Valamilyen kapcsolást tudsz ajánlani?Ha jól értelmezen ez egy külön vezérlő lenne?Másik kérdés vanmég 3db motrom abbol meg 8vezeték jönki,megnéztem a tekercseket és 3db van benne és mindnek az egyik vége közöz összevan forrasztva de az nincs kivezetve csak a tekercsek egyik vége.A többi 5 vezeték pedig valami érzékelöre van rákötve de nem encoder.Ja és ahogy számoltam 36°-os.Csak azaz érdekes benne hogy a forgorészen van a tekercs ésaz álorészben pedig mágnevan.Léptetőmotor lehetez?Bocsi kicsit sok a kérdés.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 16, 18:56
Írta: 000000000 Dátum 2006 február 16, 18:56
Majd skiccelek valamit (kész áramköröm és rajzom nincs). Ha kész átküldöm mail-ben, sajnos még csak időt sem tudok mondani, hogy mikor lesz meg.
A másik 3 motorod nem léptetőmotor,hanem szvsz DC motor, de nem igazán értem az írásból, hogy ki-kivel van :)
Képet tudsz mellékelni rólla (belső képet, esetleg adatlapot)?
A másik 3 motorod nem léptetőmotor,hanem szvsz DC motor, de nem igazán értem az írásból, hogy ki-kivel van :)
Képet tudsz mellékelni rólla (belső képet, esetleg adatlapot)?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 16, 19:12
Írta: 000000000 Dátum 2006 február 16, 19:12
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 17, 10:33
Írta: 000000000 Dátum 2006 február 17, 10:33
Az ilyesfajta kialakítást használják pl. a PC ventilátorokban is. A motor álló része dettó ugyanaz, mint egy DC motor forgórésze, a forgórésze, pedig a normál DC motor állórésze.
Viszont míg egy DC motor tekercseinek kapcsolgatását a komutátorok segítségével maga a forgás végzi, itt ez nem lehetséges (vagy mégis?), hiszen maga a tekercs áll. Ha szétszedsz egy PC hűtő ventilátort, akkor ugyanezt a konstrukciót látod, azzal a különbséggel, hogy ott a meghajtó magában a motorban van (így csak 2 táp, és 1 fordulatszám kivezetése van).
Egy ventilátor motorban is megtalálod azokat a kis fekete kockákat, amik nem mások, mint Hall szenzorok. Ezek érzékelik a forgás sebességét és irányát, amiből aztán az elektronika kapcsolgatja a tekercseket.
Ennél a motornál mindent kivezettek, ugyanakkor önálló vezérlést nem tartalmaz. Ennek köszönhetően akár a forgás irányát is megválaszthatod, ellenben a PC ventivel, ahol a meghajtó IC miatt csak egy polaritás (ezáltal egy forgásirány) lehetséges.
Megpróbálom szemléltetni a működést, először mindég egy komutátoros DC motort alapul véve, és azt a motorodhoz hasonlítva.
1. fázis:
Tegyük fel hogy a motor még áll... Ekkor egy DC motorban a kommutátorok (az egyszerűség kedvéért) csak egy tekercshez kapcsolódnak. A motorodhoz hasonlítva, most egy hall szenzor vezet a többi zár, vagyis az egyik hall szenzor a hozzá tartozó tekercsre kapcsolja a tápfeszt.
2. fázis
Miután feszültség kapcsolsz rá (gerjeszted) a motor forgórésze elfordul, megint csak az egyszerűség kedvéért 120°-ot, így már a következő tekercs kivezetéseihez kapcsolódnak a komutátorok. A motorodnál a következő hall szenzor vezet és a következő tekercset kapcsolja a tápfeszre.
3. fázis
A második tekercs is gerjesztve van így az tovább fordítja a motort 120°-kal, így a komutátor a 3 tekercset kapcsolja. A motorodnál a 3. fázishoz tartozó hall szenzor vezet, és kapcsolja a 3. fázishoz tartozó tekercset.
Hogyan kapcsol a hall szenzor?
Nos a hall szenzor a mágnesesség elvén működik, általában 4 kivezetése van. Ha egy négyzettel jelképezzük és a négyzet minden oldalára egy kivezetést teszünk, akkor elmondhatjuk, hogy a hall szenzor mindég a szemközti oldalak felé vezet. Vagyis, ha nincs mágneses tér, akkor vízszintesen, ha van akkor arra merőlegesen folyik áram. Ezek a hall szenzorok pedig a forgó rész alatt találhatók, igy annak mágneses tere vezérli azokat.
Vagyis látható, hogy bonyolultabb a helyzet pusztán a tekercsek kapcsolgatásánál, és az egy fázishoz tartozó 120°-os elfordulásnál. Ezt csupán az egyszerűbb szemléltetés miatt használtam.
Bonyolítva a helyzetet egy komutátoros 3 tekercses DC motornál, 120°-ként van egy komutátor, viszont a szénkefe 180°-ként van lévén csak két kivezetése van (360°/2). Vagyis, ha az egyik szénkefe pontosan az egyik komutátorhoz kapcsolódik, akkor a másik szénkefe a túloldalon a másik két komutátorhoz egyidőben kapcsol, vagyis lesz két párhuzamosan és velük egy sorosan kapcsolt tekercs, ezek együttesen terhelik a tápot.
Hogy az előbbieknek mi köze a motorodhoz, amikor abban nincs is szénkefe? Nos az, hogy egy mágnesnek csak északi és déli pólusa lehet, vagyis két darab, tehát a működését tekintve itt a forgó rész mágneses mezője a szénkefék szerepét tölti be. Míg a 120°-két elhelyezett hall szenzorok a komutátorhoz hasonlíthatók. Az ne tévesszen meg hogy a motorodnál 60°-ként van hall szenzor (a középsőt a túloldalra vetítve máris 120°-ként van), mert itt ez nem fontos lévén a kapcsolás nem kontakt alapú (akár 30°-ként is lehetne, illetve 120° bármely páros osztója).
Előnye ezeknek a motoroknak, hogy egyaránt rendelkeznek a DC és a léptetőmotorok minden jó tulajdonságaival, leszámítva a léptetőmotorok pozicionálhatóságát (itt nincs is értelme fokokat számolni).
Bocs, ha bonyolult voltam.
Viszont míg egy DC motor tekercseinek kapcsolgatását a komutátorok segítségével maga a forgás végzi, itt ez nem lehetséges (vagy mégis?), hiszen maga a tekercs áll. Ha szétszedsz egy PC hűtő ventilátort, akkor ugyanezt a konstrukciót látod, azzal a különbséggel, hogy ott a meghajtó magában a motorban van (így csak 2 táp, és 1 fordulatszám kivezetése van).
Egy ventilátor motorban is megtalálod azokat a kis fekete kockákat, amik nem mások, mint Hall szenzorok. Ezek érzékelik a forgás sebességét és irányát, amiből aztán az elektronika kapcsolgatja a tekercseket.
Ennél a motornál mindent kivezettek, ugyanakkor önálló vezérlést nem tartalmaz. Ennek köszönhetően akár a forgás irányát is megválaszthatod, ellenben a PC ventivel, ahol a meghajtó IC miatt csak egy polaritás (ezáltal egy forgásirány) lehetséges.
Megpróbálom szemléltetni a működést, először mindég egy komutátoros DC motort alapul véve, és azt a motorodhoz hasonlítva.
1. fázis:
Tegyük fel hogy a motor még áll... Ekkor egy DC motorban a kommutátorok (az egyszerűség kedvéért) csak egy tekercshez kapcsolódnak. A motorodhoz hasonlítva, most egy hall szenzor vezet a többi zár, vagyis az egyik hall szenzor a hozzá tartozó tekercsre kapcsolja a tápfeszt.
2. fázis
Miután feszültség kapcsolsz rá (gerjeszted) a motor forgórésze elfordul, megint csak az egyszerűség kedvéért 120°-ot, így már a következő tekercs kivezetéseihez kapcsolódnak a komutátorok. A motorodnál a következő hall szenzor vezet és a következő tekercset kapcsolja a tápfeszre.
3. fázis
A második tekercs is gerjesztve van így az tovább fordítja a motort 120°-kal, így a komutátor a 3 tekercset kapcsolja. A motorodnál a 3. fázishoz tartozó hall szenzor vezet, és kapcsolja a 3. fázishoz tartozó tekercset.
Hogyan kapcsol a hall szenzor?
Nos a hall szenzor a mágnesesség elvén működik, általában 4 kivezetése van. Ha egy négyzettel jelképezzük és a négyzet minden oldalára egy kivezetést teszünk, akkor elmondhatjuk, hogy a hall szenzor mindég a szemközti oldalak felé vezet. Vagyis, ha nincs mágneses tér, akkor vízszintesen, ha van akkor arra merőlegesen folyik áram. Ezek a hall szenzorok pedig a forgó rész alatt találhatók, igy annak mágneses tere vezérli azokat.
Vagyis látható, hogy bonyolultabb a helyzet pusztán a tekercsek kapcsolgatásánál, és az egy fázishoz tartozó 120°-os elfordulásnál. Ezt csupán az egyszerűbb szemléltetés miatt használtam.
Bonyolítva a helyzetet egy komutátoros 3 tekercses DC motornál, 120°-ként van egy komutátor, viszont a szénkefe 180°-ként van lévén csak két kivezetése van (360°/2). Vagyis, ha az egyik szénkefe pontosan az egyik komutátorhoz kapcsolódik, akkor a másik szénkefe a túloldalon a másik két komutátorhoz egyidőben kapcsol, vagyis lesz két párhuzamosan és velük egy sorosan kapcsolt tekercs, ezek együttesen terhelik a tápot.
Hogy az előbbieknek mi köze a motorodhoz, amikor abban nincs is szénkefe? Nos az, hogy egy mágnesnek csak északi és déli pólusa lehet, vagyis két darab, tehát a működését tekintve itt a forgó rész mágneses mezője a szénkefék szerepét tölti be. Míg a 120°-két elhelyezett hall szenzorok a komutátorhoz hasonlíthatók. Az ne tévesszen meg hogy a motorodnál 60°-ként van hall szenzor (a középsőt a túloldalra vetítve máris 120°-ként van), mert itt ez nem fontos lévén a kapcsolás nem kontakt alapú (akár 30°-ként is lehetne, illetve 120° bármely páros osztója).
Előnye ezeknek a motoroknak, hogy egyaránt rendelkeznek a DC és a léptetőmotorok minden jó tulajdonságaival, leszámítva a léptetőmotorok pozicionálhatóságát (itt nincs is értelme fokokat számolni).
Bocs, ha bonyolult voltam.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 17, 10:58
Írta: 000000000 Dátum 2006 február 17, 10:58
Nagyom köszönöm a kimeritő választ!
Léptetőmotort akartam venni de ezlett belőle:(
Szerintem az eladó se volt tisztába hogy milyen motoris ez.
Léptetőmotort akartam venni de ezlett belőle:(
Szerintem az eladó se volt tisztába hogy milyen motoris ez.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 19, 10:08
Írta: 000000000 Dátum 2006 február 19, 10:08
Sziasztok!
Megtudná nekem mondani valaki hogy a Sanyo Denki 3.9V 1.35A 1.8° az ilyen motoroknak mennyi a legnagyobb fordulatuk?
Nálam a Kcam4-el kb 60-80-at fordul ezek enyit tudnak?
Megtudná nekem mondani valaki hogy a Sanyo Denki 3.9V 1.35A 1.8° az ilyen motoroknak mennyi a legnagyobb fordulatuk?
Nálam a Kcam4-el kb 60-80-at fordul ezek enyit tudnak?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 19, 10:15
Írta: 000000000 Dátum 2006 február 19, 10:15
Nem! Én nekem már mentek ilyenek 10000 Step/sec-el is (persze üresen), ami 10000/400*60=1500 ford/perc)! Mind ez 3×-os tulhajtási tényezővel (3×3.9=12V).
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 19, 10:25
Írta: 000000000 Dátum 2006 február 19, 10:25
Akkor a motortuningal kell áligatnom?
Egyébként énis 12V-os tápal nyomatom.
Egyébként énis 12V-os tápal nyomatom.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 19, 11:22
Írta: 000000000 Dátum 2006 február 19, 11:22
Igen azzal kell állítani, de 800-as rpm-nél erőssen veszti a nyomatékot (gyakori lépésvesztés).
Én is 12V-ról használom, és lehet lenne még mit állítani rajta... csak időm nincs foglalkozni vele.
Én is 12V-ról használom, és lehet lenne még mit állítani rajta... csak időm nincs foglalkozni vele.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 19, 12:00
Írta: 000000000 Dátum 2006 február 19, 12:00
Nekedis ilyen leptetőid vannak?
Cím: Re:Léptetőmotor
Írta: Bicska Dátum 2006 február 19, 12:06
Írta: Bicska Dátum 2006 február 19, 12:06
Sziasztok!
A következő step-syn motorokról tud valaki valamit? 103G770-1843 típusú, ami gondolom megegyezik a 103-770-1843 elnevezéssel. Képek itt és itt
Üdv: Bicska
A következő step-syn motorokról tud valaki valamit? 103G770-1843 típusú, ami gondolom megegyezik a 103-770-1843 elnevezéssel. Képek itt és itt
Üdv: Bicska
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 19, 20:27
Írta: 000000000 Dátum 2006 február 19, 20:27
Igen
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 19, 20:38
Írta: 000000000 Dátum 2006 február 19, 20:38
Eltudnád küldeni a setup beálitást?
Megköszöném[#law]
Megköszöném[#law]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 20, 14:26
Írta: 000000000 Dátum 2006 február 20, 14:26
Hát azt sajnos nem... nincs mentve, a gépem is darabokban...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 23, 00:14
Írta: 000000000 Dátum 2006 február 23, 00:14
valaki tud valamit az alábi motorokról?
Minebea 23LM-S334-G1 4,2V 1,2A 1,8 Deg/step
Sanyo Denki 103H7126-0341 1,8A 1,8 Deg/step
Sanyo Denki 103H7123-1541 1,3A 1,8 Deg/step
ez az össz adat amit tudok, vagyis hiánytik a Sanyok névleges feszültsége ill nemtudom egyiknek sem a nyomatékát :-( ami pdf-ek vannak nekem azokban nem találtam meg :-( elvileg a keresés sem jött össze....
Minebea 23LM-S334-G1 4,2V 1,2A 1,8 Deg/step
Sanyo Denki 103H7126-0341 1,8A 1,8 Deg/step
Sanyo Denki 103H7123-1541 1,3A 1,8 Deg/step
ez az össz adat amit tudok, vagyis hiánytik a Sanyok névleges feszültsége ill nemtudom egyiknek sem a nyomatékát :-( ami pdf-ek vannak nekem azokban nem találtam meg :-( elvileg a keresés sem jött össze....
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 23, 20:27
Írta: 000000000 Dátum 2006 február 23, 20:27
Sziasztok!
Találtam egy katalógus amejben vannak adatok Sanyo Denki 103H7126
Sanyo Denki 103H7123
tipusú motorokról de sajnos az utolsó négy számjegy nem azonos a te általd leirtakkal.
A fájl nagysága kb 640k, ha érdekel el tudom küldeni.
Üdv
Találtam egy katalógus amejben vannak adatok Sanyo Denki 103H7126
Sanyo Denki 103H7123
tipusú motorokról de sajnos az utolsó négy számjegy nem azonos a te általd leirtakkal.
A fájl nagysága kb 640k, ha érdekel el tudom küldeni.
Üdv
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 23, 21:10
Írta: 000000000 Dátum 2006 február 23, 21:10
persze hogy érdekel, sőőt minden más katalógus is érdekel, mivel mostanában akarok összeütni egy weblapot amin megpróbálnék minnél több léptetőmotorrol infót összeszedni, bosszant hogyha keresek egy motorrol adatot akkor elég nehéz beszerezni :-(
e-mailt vagy a nevemre klikkelve tudsz küldeni, vagy a virgil@freemail.hu címre
e-mailt vagy a nevemre klikkelve tudsz küldeni, vagy a virgil@freemail.hu címre
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 24, 19:23
Írta: 000000000 Dátum 2006 február 24, 19:23
A katalogusokat elküldtem az e-mail cimedre
Cím: Re:Léptetőmotor
Írta: sasi Dátum 2006 február 26, 12:59
Írta: sasi Dátum 2006 február 26, 12:59
Segítség!
Egy Commodore margaréta tárcsás nyomtatóból termeltem ki a képen látható léptetőmotort, mely huzalos mechanikát mozgatott. A motoron semmiféle azonosító jelzés sincs.
A forgórész nem mágneses, az állórész négy tekercs-párból áll, a szemben lévők sorba vannak kapcsolva, (ellenállásuk 1,5 ohm) így nyolc kivezetése van. A motor súlya 1,7 kg.
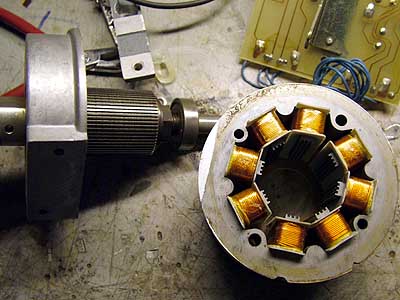
sasi
Egy Commodore margaréta tárcsás nyomtatóból termeltem ki a képen látható léptetőmotort, mely huzalos mechanikát mozgatott. A motoron semmiféle azonosító jelzés sincs.
A forgórész nem mágneses, az állórész négy tekercs-párból áll, a szemben lévők sorba vannak kapcsolva, (ellenállásuk 1,5 ohm) így nyolc kivezetése van. A motor súlya 1,7 kg.
sasi
Cím: Re:Léptetőmotor
Írta: sasi Dátum 2006 február 26, 13:03
Írta: sasi Dátum 2006 február 26, 13:03
Nagyon ügyes és figyelmes vagyok…
Persze, hogy kérdésem is van, hogyan működik ez a motor?
Persze, hogy kérdésem is van, hogyan működik ez a motor?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 február 26, 13:51
Írta: 000000000 Dátum 2006 február 26, 13:51
Hali!
Sasi: Szerintem ugy, hogy amikor a megfelelo tekercsek gerjesztest kapnak az alloreszt megprobaljak ugy elmozditani, hogy a leheto legkissebb magneses ellanallassal rendelkezzen. Ha nem igy van javitsatok ki.
Sasi: Szerintem ugy, hogy amikor a megfelelo tekercsek gerjesztest kapnak az alloreszt megprobaljak ugy elmozditani, hogy a leheto legkissebb magneses ellanallassal rendelkezzen. Ha nem igy van javitsatok ki.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 március 18, 12:44
Írta: 000000000 Dátum 2006 március 18, 12:44
VR (Variable reluctance) mocc. Nagyobb sebessegekhez valo konstrukcio, mivel nincs magnes nem gerjeszt aramot fekezesnel/gyorsintasnal a tekercsben.
Hatranya a relative kis nyomatek.
Hatranya a relative kis nyomatek.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 március 19, 08:15
Írta: 000000000 Dátum 2006 március 19, 08:15
Hali!
A Robotron SPA 52/60 két fázisú, Unipoláris (6 kivezetéses) léptetőmotor adatlapját keresem.
Elsősorban a nyomatéka érdekelne.
Tud valaki segíteni?
Köszi.
A Robotron SPA 52/60 két fázisú, Unipoláris (6 kivezetéses) léptetőmotor adatlapját keresem.
Elsősorban a nyomatéka érdekelne.
Tud valaki segíteni?
Köszi.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 március 21, 07:05
Írta: 000000000 Dátum 2006 március 21, 07:05
Hali!
Hány kivezetéses és hány fázisú motorok használhatók István vezérlőjével?
Hány kivezetéses és hány fázisú motorok használhatók István vezérlőjével?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 március 21, 07:08
Írta: 000000000 Dátum 2006 március 21, 07:08
2, 6 (vagy 5). [#nezze]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 március 24, 21:22
Írta: 000000000 Dátum 2006 március 24, 21:22
Üdv mindenkinek!
Aki léptetőmotort akar venni, annak melegen ajánlom az Optimum-hungária Kft. által forgalmazott motorokat. Egy kis marógépük CNC-sítéséhez árulják, de nagyon jók. 95euro+fa/db.
Összehasonlítás: Isel MS 200 HT 95euro+fa és 2Nm nyomaték bipolárisan, OPtimum motor 95 euro és fa, valamint 2,75 Nm nyomaték bipolárba. asszem nindkettő hybrid motor.
Aki léptetőmotort akar venni, annak melegen ajánlom az Optimum-hungária Kft. által forgalmazott motorokat. Egy kis marógépük CNC-sítéséhez árulják, de nagyon jók. 95euro+fa/db.
Összehasonlítás: Isel MS 200 HT 95euro+fa és 2Nm nyomaték bipolárisan, OPtimum motor 95 euro és fa, valamint 2,75 Nm nyomaték bipolárba. asszem nindkettő hybrid motor.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 március 24, 21:24
Írta: 000000000 Dátum 2006 március 24, 21:24
Jahh!
Majd elfelejtettem, magyar elérhetőség
www.optimum-hungaria.hu
ill. maga a termék:
http://www.optimum-maschinen.de/produkte/1/cnc-anbausatz-fraesen/index.html
Majd elfelejtettem, magyar elérhetőség
www.optimum-hungaria.hu
ill. maga a termék:
http://www.optimum-maschinen.de/produkte/1/cnc-anbausatz-fraesen/index.html
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 március 25, 14:16
Írta: 000000000 Dátum 2006 március 25, 14:16
Szerintem meg kukkants ra egy Nanotec arlistara... meg mindig ok a legolcsobbak a forgalmazok kozul!!!!
Es dajcslandbol a szallitasi koltseg 10 Ojro...
Es dajcslandbol a szallitasi koltseg 10 Ojro...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 március 25, 18:10
Írta: 000000000 Dátum 2006 március 25, 18:10
Elmondanám, hogy a nanotec forgalmazója Mo.-n az ISEL!és a #397 hozzászólásomban leírt MS szériájú motor is nanotec.Tudom, hiszen pont egy hete rendeltem ilyen motorokat az Iseltől...ezért is írtam meg a tapasztalatomat...mert a vétel után bukkantam rá az Optimum motorokra.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 március 26, 11:36
Írta: 000000000 Dátum 2006 március 26, 11:36
Elmondanam, hogy ha KOZVETLENUL a Nanotectol rendeled meg a motorkaidat, akkor SOKKAL OLCSOBBAN meguszod!!! Legalabbis eros a gyanum!!! az ISEL mivel nem jotekonysagi egylet hanem kereskedo, ertelemszeruen rateszi a maga kis hasznat!!!
Persze ez csak az en hulye kis megerzesem, lehet, hogy toluk meg olcsobban is kapod, mert valami kozhasznu alapitvanykent tevekenykednek :)
De azert rendelj toluk batran :)
Persze ez csak az en hulye kis megerzesem, lehet, hogy toluk meg olcsobban is kapod, mert valami kozhasznu alapitvanykent tevekenykednek :)
De azert rendelj toluk batran :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 március 26, 11:37
Írta: 000000000 Dátum 2006 március 26, 11:37
Egy par evvel ezelotti tapasztalatom meg nem irom be megyegszer, mert valami oknal fogva kimoderaltak :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 március 26, 11:41
Írta: 000000000 Dátum 2006 március 26, 11:41
De ahelyett, hogy rosszral dobaloznank:
www.nanotec.de
Itt szepen meglesed az adott motorok arait...
Szallitasi koltseg 10-20 Euro magyarorszagra 3 bazinagy motor es 3 nagy hajtas eseten.
Aztan szamolni, osszeadni, kivonni mar remelem te is tudsz.
Ha netan tudod az ISEL-es arakat kozzeteheted, lehet, hogy 4 ev ota valtoztattak valamicsket az arkepzesi strategiajukon (meghat akkor meg magyaro nem volt EU tag, muszaj volt ratenniuk a VAM-ot is, en meg maganban viszegettem be a mocikat ugyhogy ez is elmaradt...
www.nanotec.de
Itt szepen meglesed az adott motorok arait...
Szallitasi koltseg 10-20 Euro magyarorszagra 3 bazinagy motor es 3 nagy hajtas eseten.
Aztan szamolni, osszeadni, kivonni mar remelem te is tudsz.
Ha netan tudod az ISEL-es arakat kozzeteheted, lehet, hogy 4 ev ota valtoztattak valamicsket az arkepzesi strategiajukon (meghat akkor meg magyaro nem volt EU tag, muszaj volt ratenniuk a VAM-ot is, en meg maganban viszegettem be a mocikat ugyhogy ez is elmaradt...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 március 26, 16:05
Írta: 000000000 Dátum 2006 március 26, 16:05
Kedves hunserv!
Tisztában vagyok a nanotec árakkal, hiszen még én tettem fel őket ebben a fórumban, ugy jó egy éve /azóta minimálisan változtak/.Továbbá nekem nincsenek már szükségeim motorokra, csak egy tapasztalatomat írtam meg, hátha segít valakinek.És ha figyelmesen olvastad volna a hozzászólásomat észre vetted volna, hogy leírtam az Isel árát /csak euróban, hiszen devizakövető a termékeik ára/.
szép napot
Tisztában vagyok a nanotec árakkal, hiszen még én tettem fel őket ebben a fórumban, ugy jó egy éve /azóta minimálisan változtak/.Továbbá nekem nincsenek már szükségeim motorokra, csak egy tapasztalatomat írtam meg, hátha segít valakinek.És ha figyelmesen olvastad volna a hozzászólásomat észre vetted volna, hogy leírtam az Isel árát /csak euróban, hiszen devizakövető a termékeik ára/.
szép napot
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 március 26, 16:18
Írta: 000000000 Dátum 2006 március 26, 16:18
Bocs, az osszes hozzaszolast nem olvastam el...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 március 30, 13:51
Írta: 000000000 Dátum 2006 március 30, 13:51
Sziasztok!
Van sejtése valakinek, hogy egy Robotron S6130 elektromos írógépben milyen léptetőmotor lehet, és fel lehet-e használni CNC célokra?
Van sejtése valakinek, hogy egy Robotron S6130 elektromos írógépben milyen léptetőmotor lehet, és fel lehet-e használni CNC célokra?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 március 30, 18:09
Írta: 000000000 Dátum 2006 március 30, 18:09
Hali!
valszeg olyan motorok, mint amiket István árul /az első kettő robotron SPA/.ezeket kisebb mechanika /fa, műanyag ill. műanyag/fa/alu kompozit/ mozgatására tudod használni, még nyákot is tudsz vele marni.
valszeg olyan motorok, mint amiket István árul /az első kettő robotron SPA/.ezeket kisebb mechanika /fa, műanyag ill. műanyag/fa/alu kompozit/ mozgatására tudod használni, még nyákot is tudsz vele marni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 április 03, 12:20
Írta: 000000000 Dátum 2006 április 03, 12:20
Sziasztok
Anno vásároltam néhány motort Istvántól, a Típusa Sanyo 103-820-2. Ha jól emlékszem, akkor István "Góliát" motorként hírdette. Az lenne a kérdésem, hogy tudtok-e ezekhez a motorokhoz adatlapot? Milyen tapasztalatok vannak vele? Elég nehézkes a mechanikánk, így el kellene dönteni, hogy elegendő-e ez a motor, vagy szerezzünk be másikat.
Anno vásároltam néhány motort Istvántól, a Típusa Sanyo 103-820-2. Ha jól emlékszem, akkor István "Góliát" motorként hírdette. Az lenne a kérdésem, hogy tudtok-e ezekhez a motorokhoz adatlapot? Milyen tapasztalatok vannak vele? Elég nehézkes a mechanikánk, így el kellene dönteni, hogy elegendő-e ez a motor, vagy szerezzünk be másikat.
Cím: Re:Léptetőmotor
Írta: Robika37 Dátum 2006 április 11, 21:05
Írta: Robika37 Dátum 2006 április 11, 21:05
Üdv !
Építek egy cnc esztergát és ehhez kötődően az lenne a kérdésem,hogy a léptetőmotoroknál mitől függ az elérhető max lépésszám/perc?
bocs ha nagyon zöld a kérdés
a gyorsjárati funkció miatt lenne fontos, ollan
750mm-re sikeredett a csúcstávolság
Építek egy cnc esztergát és ehhez kötődően az lenne a kérdésem,hogy a léptetőmotoroknál mitől függ az elérhető max lépésszám/perc?
bocs ha nagyon zöld a kérdés
a gyorsjárati funkció miatt lenne fontos, ollan
750mm-re sikeredett a csúcstávolság
Cím: Re:Léptetőmotor
Írta: sasi Dátum 2006 április 12, 15:57
Írta: sasi Dátum 2006 április 12, 15:57
Üdv' mindenkinek!
Hátha valakit érdekel: Sanyo Denki léptetőmotorok teljes választékát kínálja a Q-TECH,melynek árlistája innenletölthető.
sasi
Hátha valakit érdekel: Sanyo Denki léptetőmotorok teljes választékát kínálja a Q-TECH,melynek árlistája innenletölthető.
sasi
Cím: Re:Léptetőmotor
Írta: 5bzs27u7 Dátum 2006 április 12, 22:12
Írta: 5bzs27u7 Dátum 2006 április 12, 22:12
Üdv.
Érdekelne a lista de rosszul töltődik le,
elküldenéd?
Érdekelne a lista de rosszul töltődik le,
elküldenéd?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 április 13, 06:32
Írta: 000000000 Dátum 2006 április 13, 06:32
Én sem tudom megnyitni!
Cím: Re:Léptetőmotor
Írta: ifarkas Dátum 2006 április 13, 07:40
Írta: ifarkas Dátum 2006 április 13, 07:40
A .zip-et át kell írni xls-re és táblázatkezelővel meglehet nyitni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 április 13, 08:36
Írta: 000000000 Dátum 2006 április 13, 08:36
Nade hogy a retekbe lett ebből ZIP?!
Cím: Re:Léptetőmotor
Írta: sasi Dátum 2006 április 13, 09:53
Írta: sasi Dátum 2006 április 13, 09:53
Bocsánat, feltöltéskor összekevertem valamit, kijavítottam, már ZIP-be van az árlista.
sasi
sasi
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 április 16, 11:44
Írta: 000000000 Dátum 2006 április 16, 11:44
Sziasztok!
A léptető motorok kiválasztásánál milyen tulajdonságokat kell figyelembe venni?
És honnan lehet beszerezni őket újan esetleg használtan?
köszi
A léptető motorok kiválasztásánál milyen tulajdonságokat kell figyelembe venni?
És honnan lehet beszerezni őket újan esetleg használtan?
köszi
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 április 16, 21:56
Írta: 000000000 Dátum 2006 április 16, 21:56
Szia Csuszka!
Mechanikai sezempontból a max. tartónyomatékot, a megengedhető frekvenciát (a fordulatszám fő paramétere) és a fordulatonkénti lépések számát. A max tartónyomaték. Hobby célokra a kb. 0.4-2 Kg/m nyomatékú léptecsek kíválóan megfelelnek. A gyengébbel inkább csak rajz ill. gravírozó gépet, míg az erősebb motorokkal akár fémmegmunkálására is alkalmas CNC marógépet vagy esztergát készíthetsz. Árak kb 2000 Ft-tól akár 40000 Ft-ig is terjedhetnek elsősorban annak függvényében, hogy új-e vagy régi a motor. Nézd meg SASI kollégánk árlistáját. Elektromos szempontból célszerű olyan motort venned amelyet a fórumunk tagjainak többsége által használt PROFI1 vezérlő optimálisan tud kezelni, azaz: a 4-12 Voltos, 0,5-2A-es, un.5, 6 vagy 8 vezetékes unipoláris motorok. Sajnos olcsóbb (használt) léptecseket csak a netről szerezhetsz be.
Mechanikai sezempontból a max. tartónyomatékot, a megengedhető frekvenciát (a fordulatszám fő paramétere) és a fordulatonkénti lépések számát. A max tartónyomaték. Hobby célokra a kb. 0.4-2 Kg/m nyomatékú léptecsek kíválóan megfelelnek. A gyengébbel inkább csak rajz ill. gravírozó gépet, míg az erősebb motorokkal akár fémmegmunkálására is alkalmas CNC marógépet vagy esztergát készíthetsz. Árak kb 2000 Ft-tól akár 40000 Ft-ig is terjedhetnek elsősorban annak függvényében, hogy új-e vagy régi a motor. Nézd meg SASI kollégánk árlistáját. Elektromos szempontból célszerű olyan motort venned amelyet a fórumunk tagjainak többsége által használt PROFI1 vezérlő optimálisan tud kezelni, azaz: a 4-12 Voltos, 0,5-2A-es, un.5, 6 vagy 8 vezetékes unipoláris motorok. Sajnos olcsóbb (használt) léptecseket csak a netről szerezhetsz be.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 április 17, 19:11
Írta: 000000000 Dátum 2006 április 17, 19:11
Bocs' de a nyomaték mértékegysége Nm és nem kg/m! De ha netán a régi jelölésű mkp-ként gondoltad, akkor 2 mkp az meg hobby gépnek igencsak rendes, merthogy 20 Nm.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 április 17, 20:44
Írta: 000000000 Dátum 2006 április 17, 20:44
Szia Imi!
Ne vitatkozzunk most a fizikáról. Mióta én az egyetemet elvégeztem összesen háromszor volt már mértékegységváltás. Csak az egyszerűség kedvéért mondtam Kg-ot. Lényeg az, hogy nem árt ha igenis erős a motorod pl. akár 20Nm. Hatékonyan, komolyabb előtolással fémet csak erős motorú és súlyos vázú géppel lehet megmunkálni. Többek között emmiatt a neves gyártók (pl. ISEL) már nem is léptetőmotorokat hanem sokwattos un. szervómotorokat használnak. Azokkal a nagyobb teljesítmény, gyorsabb üresjárat és az encoder miatt nagyobb pontosság érhető el.
Ne vitatkozzunk most a fizikáról. Mióta én az egyetemet elvégeztem összesen háromszor volt már mértékegységváltás. Csak az egyszerűség kedvéért mondtam Kg-ot. Lényeg az, hogy nem árt ha igenis erős a motorod pl. akár 20Nm. Hatékonyan, komolyabb előtolással fémet csak erős motorú és súlyos vázú géppel lehet megmunkálni. Többek között emmiatt a neves gyártók (pl. ISEL) már nem is léptetőmotorokat hanem sokwattos un. szervómotorokat használnak. Azokkal a nagyobb teljesítmény, gyorsabb üresjárat és az encoder miatt nagyobb pontosság érhető el.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 április 18, 07:52
Írta: 000000000 Dátum 2006 április 18, 07:52
Sziasztok.
Valakinek nincs véletlen az alábbi tipusu motorhoz adatlapja?A Minebea oldalán sajna nemtalálom eszt a tipust. MINEBEA CO. 23LM-C202-P5V T8712
Valakinek nincs véletlen az alábbi tipusu motorhoz adatlapja?A Minebea oldalán sajna nemtalálom eszt a tipust. MINEBEA CO. 23LM-C202-P5V T8712
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 április 18, 20:09
Írta: 000000000 Dátum 2006 április 18, 20:09
Hello!
Köszi az info-t!
Nézegettem Magi István léptető motor választékát, de ettől igazán nem lettem okosabb, mert nem tudom, hogy az annyi az mennyi.
Nem tudnál konkrét típusokat ajánlani ha kisebb alu darabokat akarok megmunkálni?
Köszi
Köszi az info-t!
Nézegettem Magi István léptető motor választékát, de ettől igazán nem lettem okosabb, mert nem tudom, hogy az annyi az mennyi.
Nem tudnál konkrét típusokat ajánlani ha kisebb alu darabokat akarok megmunkálni?
Köszi
Cím: Re:Léptetőmotor
Írta: sasi Dátum 2006 április 20, 14:25
Írta: sasi Dátum 2006 április 20, 14:25
Tisztelt Kollegák!
Annak aki mélyebben érdeklődik a léptető motorok lelki világa iránt ajánlom az alábbi PDF fájlok letöltését (2.8 és 4.5 MB).
kulonleges_szervohajtasok.pdf
leptetomotoros_hajtasok.pdf
Annak aki mélyebben érdeklődik a léptető motorok lelki világa iránt ajánlom az alábbi PDF fájlok letöltését (2.8 és 4.5 MB).
kulonleges_szervohajtasok.pdf
leptetomotoros_hajtasok.pdf
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2006 április 29, 00:06
Írta: 4mjnxdwuu Dátum 2006 április 29, 00:06
Sziasztok.
Szerintetek kb hány Nm-t tudhat egy 6cm hosszú 8,5cm átmérőjű moci 9,5 mm-es tengellyel, 3 Ohm-os tekercsekkel??? Nekem gőzöm sincs még csak 6 cm-es mocikat használtam.
Szerintetek kb hány Nm-t tudhat egy 6cm hosszú 8,5cm átmérőjű moci 9,5 mm-es tengellyel, 3 Ohm-os tekercsekkel??? Nekem gőzöm sincs még csak 6 cm-es mocikat használtam.
Cím: Re:Léptetőmotor
Írta: Rinaldo Dátum 2006 április 29, 10:58
Írta: Rinaldo Dátum 2006 április 29, 10:58
Kb 1-1.7Nm, de sok mindentől függ.Mivel és milyen üzemmódban hajtod?
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2006 április 29, 22:21
Írta: 4mjnxdwuu Dátum 2006 április 29, 22:21
Szia Rinaldo.
Még nem tudom, a 2. gépembe lesz bépítve /vagy nem/, István valamelyik vezérlőjével. Elméletileg unipoláris, de hogy melyik módban fog működni.!? Kicsit többnek jobban örültem volna, csak fogasszíjjas mozgatást akarok az új gépre,nem ártana ha erősebb lenne.
Még nem tudom, a 2. gépembe lesz bépítve /vagy nem/, István valamelyik vezérlőjével. Elméletileg unipoláris, de hogy melyik módban fog működni.!? Kicsit többnek jobban örültem volna, csak fogasszíjjas mozgatást akarok az új gépre,nem ártana ha erősebb lenne.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 02, 12:14
Írta: 000000000 Dátum 2006 május 02, 12:14
Hali!
Egy kérdés.Tervezem egy cnc gép megépítését és van 3 különböző lépés szögű motorom.Használhatom e őket vagy azonos lépésszögűek kellenek?
Egy kérdés.Tervezem egy cnc gép megépítését és van 3 különböző lépés szögű motorom.Használhatom e őket vagy azonos lépésszögűek kellenek?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 02, 12:35
Írta: 000000000 Dátum 2006 május 02, 12:35
Hello!
Általában nem érdekes (a programoknál minden tengelynek saját adatai vannak), de a KCam4 nem szereti!
Általában nem érdekes (a programoknál minden tengelynek saját adatai vannak), de a KCam4 nem szereti!
Cím: Re:Léptetőmotor
Írta: w43pwt626 Dátum 2006 május 05, 10:39
Írta: w43pwt626 Dátum 2006 május 05, 10:39
Légyszi segítsetek!
Abszolút kezdő mazsola vagyok :)
Összeraktam az elektronikát, bekötöttem a motorokat (egyelőre 1-1-t tengelyenként), de sajnos a motor úgy néz ki, nem bírja.
A terv szerint a gép a következőkből áll: x: 2,5m Isel sin+görgőskocsi; y: 1,5m Isel sin+görgőskocsi+motor+ventilátor+cekasz befogó (kb. 15kg) + a négy db Ronotron 12V motor, fogasszíjjas direkt hajtás (a motor tengelyén a fogaskerék áttétel nélkül, a sin másik végén szabadonfutó csapágyazott tengely, a szíj a görgőskocsira rögzítve.)
Tapasztalat: a motor nem bírja beindítani a mechanikát, erőldködik, de nem indul el. Leszedve a szíjat (üresen) is csak egy ideig pörög, azután hangot ad, de nem forog a tengely! Gondolkodtam az áttételen, de ha üresen se pörög a tengely, akkor nincs mire áttételt tenni nem?
Mit szúrhattam el? Melyik beállítás helytelensége okozhatja a hibát?
Előre is köszönöm a segítséget!
[#email]bat@batgraco.hu
Abszolút kezdő mazsola vagyok :)
Összeraktam az elektronikát, bekötöttem a motorokat (egyelőre 1-1-t tengelyenként), de sajnos a motor úgy néz ki, nem bírja.
A terv szerint a gép a következőkből áll: x: 2,5m Isel sin+görgőskocsi; y: 1,5m Isel sin+görgőskocsi+motor+ventilátor+cekasz befogó (kb. 15kg) + a négy db Ronotron 12V motor, fogasszíjjas direkt hajtás (a motor tengelyén a fogaskerék áttétel nélkül, a sin másik végén szabadonfutó csapágyazott tengely, a szíj a görgőskocsira rögzítve.)
Tapasztalat: a motor nem bírja beindítani a mechanikát, erőldködik, de nem indul el. Leszedve a szíjat (üresen) is csak egy ideig pörög, azután hangot ad, de nem forog a tengely! Gondolkodtam az áttételen, de ha üresen se pörög a tengely, akkor nincs mire áttételt tenni nem?
Mit szúrhattam el? Melyik beállítás helytelensége okozhatja a hibát?
Előre is köszönöm a segítséget!
[#email]bat@batgraco.hu
Cím: Re:Léptetőmotor
Írta: yhwx2ew89 Dátum 2006 május 05, 16:00
Írta: yhwx2ew89 Dátum 2006 május 05, 16:00
Üdv!
Mi is az a "GOLIÁT"?Tud valaki adatokat róla?
Mi is az a "GOLIÁT"?Tud valaki adatokat róla?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 05, 22:31
Írta: 000000000 Dátum 2006 május 05, 22:31
Hétfön utánna nézek és elküldöm ha jó?
Cím: Re:Léptetőmotor
Írta: yhwx2ew89 Dátum 2006 május 08, 10:43
Írta: yhwx2ew89 Dátum 2006 május 08, 10:43
Köszönöm az infot!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 08, 13:24
Írta: 000000000 Dátum 2006 május 08, 13:24
Hali!
Van egy jó nagy mechanikám[#alien], viszonylag nagy tömeggel. Az Y tengelynek legakább 70kg-ot kéne mozgatnia (minél gyorsabban).
A mechanika 'precíziós' golyós orsó, görgős szán blabla.. , szóval ciszonylag könnyen mozog, csak az indítás pillanatában kell nagy erő...
Van valakinek tapasztalata, tudtok léptetőmotort ajánlani, mekkora Nm kéne kb?
Köszi!
[#vigyor2]
ui: vennék nagy teljesítményű léptetőmotort( lehetőleg bipoláris 1.8°-os) 3 darabot.
Van egy jó nagy mechanikám[#alien], viszonylag nagy tömeggel. Az Y tengelynek legakább 70kg-ot kéne mozgatnia (minél gyorsabban).
A mechanika 'precíziós' golyós orsó, görgős szán blabla.. , szóval ciszonylag könnyen mozog, csak az indítás pillanatában kell nagy erő...
Van valakinek tapasztalata, tudtok léptetőmotort ajánlani, mekkora Nm kéne kb?
Köszi!
[#vigyor2]
ui: vennék nagy teljesítményű léptetőmotort( lehetőleg bipoláris 1.8°-os) 3 darabot.
Cím: Re:Léptetőmotor
Írta: yuagaci9g Dátum 2006 május 08, 17:44
Írta: yuagaci9g Dátum 2006 május 08, 17:44
sanyike!
Rogzits a tengelyre egy 2cm atmeroju hengert, erre tekerjel valami vekony madzagot es huzzad egy rugos merleggel, vagy akasszal ra valami nehezseget, amig a kello nyomatekkal elindul.
Kb. 10szer ennyi Ncm a minimalis nyomatek a megmozditashoz. Ennek legalabb a ketszereset illik hasznalni.
Rogzits a tengelyre egy 2cm atmeroju hengert, erre tekerjel valami vekony madzagot es huzzad egy rugos merleggel, vagy akasszal ra valami nehezseget, amig a kello nyomatekkal elindul.
Kb. 10szer ennyi Ncm a minimalis nyomatek a megmozditashoz. Ennek legalabb a ketszereset illik hasznalni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 09, 08:48
Írta: 000000000 Dátum 2006 május 09, 08:48
Nagyon jó ötlet!
Asszem beszerzek egy rugós erőmérőt.
Köszönöm![#alien]
Asszem beszerzek egy rugós erőmérőt.
Köszönöm![#alien]
Cím: Re:Léptetőmotor
Írta: f6kuxbs9f Dátum 2006 május 09, 11:45
Írta: f6kuxbs9f Dátum 2006 május 09, 11:45
Sziasztok!
Esetleg digitális konyhai mérleg, adott hosszúságú karral nyomva?
Üdv
Esetleg digitális konyhai mérleg, adott hosszúságú karral nyomva?
Üdv
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 09, 13:56
Írta: 000000000 Dátum 2006 május 09, 13:56
Pecás ismerőstől kérjél halmérleget.
-gondolom jó-
-------------------------------------
Nekem egy 16mm-es orsóm van. Rátekerem a drótot, a drót végére a mérleget.
Mérleg meghúz, orsó elindul,leolvas.
Mondjuk:16 kg.
Az mennyi Nm? brrrrr.....
[#zavart1]
-gondolom jó-
-------------------------------------
Nekem egy 16mm-es orsóm van. Rátekerem a drótot, a drót végére a mérleget.
Mérleg meghúz, orsó elindul,leolvas.
Mondjuk:16 kg.
Az mennyi Nm? brrrrr.....
[#zavart1]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 09, 14:19
Írta: 000000000 Dátum 2006 május 09, 14:19
Szia bélabá
Nyomaték=erő*erőkar!!
A tengelyed 16mm, akkor az erőkar 16mm/2=8mm=0.008m
a 16kg --> 160N (mert g=9.81, kerekítve 10)
Tehát 160N*0.008m = 1.28 Nm
Nyomaték=erő*erőkar!!
A tengelyed 16mm, akkor az erőkar 16mm/2=8mm=0.008m
a 16kg --> 160N (mert g=9.81, kerekítve 10)
Tehát 160N*0.008m = 1.28 Nm
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 09, 14:57
Írta: 000000000 Dátum 2006 május 09, 14:57
Tyű!
Köszönöm szépen![#worship]
Köszönöm szépen![#worship]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 09, 15:34
Írta: 000000000 Dátum 2006 május 09, 15:34
Tehér bélabá esetében, Lampas javaslatával élve és tyutyi számítását felhasználva, 1.28Nm * 2 nyomatéku motor megfelelő? [#vigyor3]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 09, 22:58
Írta: 000000000 Dátum 2006 május 09, 22:58
Sziasztok!
Szerintem jóval pontosabb lenne a mérés, ha az erőkar nagyobb lenne. Mondjok valami nagyobb ármérőjű kereket erősítenél a tengelyre, erre a damilt és meghuzod a halmérővel :))
Modjuk rátennél egy kb 50-100mm es kerket a tengelyre.
Olyan ez, mint a mérőműszereknél.Ott is a méréshatás felső 2/3 -ában szoktak mérni, és itt az erőkar nagyon eltörpül az erőhöz képest, ezért nem hiszem, hogy túl pontos lenne így a mérés.
Szerintem jóval pontosabb lenne a mérés, ha az erőkar nagyobb lenne. Mondjok valami nagyobb ármérőjű kereket erősítenél a tengelyre, erre a damilt és meghuzod a halmérővel :))
Modjuk rátennél egy kb 50-100mm es kerket a tengelyre.
Olyan ez, mint a mérőműszereknél.Ott is a méréshatás felső 2/3 -ában szoktak mérni, és itt az erőkar nagyon eltörpül az erőhöz képest, ezért nem hiszem, hogy túl pontos lenne így a mérés.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2006 május 11, 18:36
Írta: svejk Dátum 2006 május 11, 18:36
Szasztok!
Van 3db egyforma umnipoláris léptetőmotorom eladó.
2.5V 4.6A 2.5Nm 1.8fok A három együtt 33000Ft.
Illetve 3db 5.2V 1.4A 0.7Nm 1.8fok A három együtt 15000Ft.
Üdv. Németh István
svejk01@fibermail.hu
Van 3db egyforma umnipoláris léptetőmotorom eladó.
2.5V 4.6A 2.5Nm 1.8fok A három együtt 33000Ft.
Illetve 3db 5.2V 1.4A 0.7Nm 1.8fok A három együtt 15000Ft.
Üdv. Németh István
svejk01@fibermail.hu
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2006 május 11, 19:15
Írta: svejk Dátum 2006 május 11, 19:15
Bocsi.javítás:Sziasztok és unipoláris
valamint csak 2.1Nm (300 oz.in.)roszzul váltottam
valamint csak 2.1Nm (300 oz.in.)roszzul váltottam
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2006 május 11, 20:02
Írta: svejk Dátum 2006 május 11, 20:02
Sziasztok!
A nagyobbik motorok gazdára leltek.
A nagyobbik motorok gazdára leltek.
Cím: Re:Léptetőmotor
Írta: 3vv2btrhv Dátum 2006 május 12, 16:30
Írta: 3vv2btrhv Dátum 2006 május 12, 16:30
Sziasztok
Megosztom veletek én hogyan ( Mértem ) ki a motorom és a mechanikám ( surlodását).
A motor tengejére rögzitettem egy behajto vasat arra 100 MM- re rögzitettem egy poharat és bekepcsolt vezérlönél elkeztem belerakni anyákat és amikor lebillent megmértem gramm pontosan ( több mérés átlaga ) kijött 209 gramm . Ezután ugyanezt a behajtokart a mechanikámra rakva 420 gramm adodott . Adig röviditettem a Derlin anya hosszát amig nem keptam kisseb értéket ez 10 MM-re jöt ki .
Inentöl elindult a mechanikám .
A modszert Lámpás barátom irta meg nekem de én is megtaláltam régen a neten ezt a modszert csak átsiklottam felete .
Ha valaki ezeket az értékeket kiszámolná nekem azt nagyon megköszöném !!
Tibor
Megosztom veletek én hogyan ( Mértem ) ki a motorom és a mechanikám ( surlodását).
A motor tengejére rögzitettem egy behajto vasat arra 100 MM- re rögzitettem egy poharat és bekepcsolt vezérlönél elkeztem belerakni anyákat és amikor lebillent megmértem gramm pontosan ( több mérés átlaga ) kijött 209 gramm . Ezután ugyanezt a behajtokart a mechanikámra rakva 420 gramm adodott . Adig röviditettem a Derlin anya hosszát amig nem keptam kisseb értéket ez 10 MM-re jöt ki .
Inentöl elindult a mechanikám .
A modszert Lámpás barátom irta meg nekem de én is megtaláltam régen a neten ezt a modszert csak átsiklottam felete .
Ha valaki ezeket az értékeket kiszámolná nekem azt nagyon megköszöném !!
Tibor
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2006 május 12, 20:44
Írta: svejk Dátum 2006 május 12, 20:44
Sziasztok!
Előre is boccs a reklámért.
Lenne még három egyforma mocim kissebb cnc-re.
SLO-SYN MA61FS-80020
5V, 1A, 200lépés 60oz.in.(0.42Nm),8 kivezetéses
bipolárisnak is beköthető,igy illeszkedik a PROFI2-höz is. A három együtt 10000Ft.
Üdv: Németh István svejk01@fibermail.hu
Előre is boccs a reklámért.
Lenne még három egyforma mocim kissebb cnc-re.
SLO-SYN MA61FS-80020
5V, 1A, 200lépés 60oz.in.(0.42Nm),8 kivezetéses
bipolárisnak is beköthető,igy illeszkedik a PROFI2-höz is. A három együtt 10000Ft.
Üdv: Németh István svejk01@fibermail.hu
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2006 május 14, 22:44
Írta: 4mjnxdwuu Dátum 2006 május 14, 22:44
Sziasztok
Az lenne a kérdésem ismeri-e valaki a BEAGER LAHR motorokat, abból is az RDM 599/50 adatlapja érdekelne. /9,5mm tengely 8,5cm átmérő, 14,5cm hossz a kapocsléccel, 9 cm valós motorhossz, 0,72/0,36 fok, 0,7ohm, 2,4A 10 kivezetés, 5 tekercs?
Az lenne a kérdésem ismeri-e valaki a BEAGER LAHR motorokat, abból is az RDM 599/50 adatlapja érdekelne. /9,5mm tengely 8,5cm átmérő, 14,5cm hossz a kapocsléccel, 9 cm valós motorhossz, 0,72/0,36 fok, 0,7ohm, 2,4A 10 kivezetés, 5 tekercs?
Cím: Re:Léptetőmotor
Írta: f6kuxbs9f Dátum 2006 május 15, 03:29
Írta: f6kuxbs9f Dátum 2006 május 15, 03:29
Szia!
Ötfázisúnak tűnik, csak akkor vedd meg, ha van hozzá vezérlés is.
Üdv
Ötfázisúnak tűnik, csak akkor vedd meg, ha van hozzá vezérlés is.
Üdv
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2006 május 15, 05:40
Írta: 4mjnxdwuu Dátum 2006 május 15, 05:40
Sziasztok.
A vezérlés nem feltétlenül probléma, inkább az érdekelne hány Nm-es lehet. Nagyon örülnék neki ha valaki megmondaná, mert ha nem sok, akkor tényleg nem éri meg vele foglalkozni.
A vezérlés nem feltétlenül probléma, inkább az érdekelne hány Nm-es lehet. Nagyon örülnék neki ha valaki megmondaná, mert ha nem sok, akkor tényleg nem éri meg vele foglalkozni.
Cím: Re:Léptetőmotor
Írta: ebalint Dátum 2006 május 15, 18:59
Írta: ebalint Dátum 2006 május 15, 18:59
Szia!
Ebben a témakörben a 165. hozzászólás /és még néhány a környékén/ az enyém.
/fénykép a Berger Lahr -ról/
Engem ezekhez való vezérlő érdekelne.
Nyomatékotne tudom...
Ebben a témakörben a 165. hozzászólás /és még néhány a környékén/ az enyém.
/fénykép a Berger Lahr -ról/
Engem ezekhez való vezérlő érdekelne.
Nyomatékotne tudom...
Cím: Re:Léptetőmotor
Írta: ebalint Dátum 2006 május 15, 19:11
Írta: ebalint Dátum 2006 május 15, 19:11
Adatlap Bergerekről:
http://lum_pen.tar.hu/egyeb/berger.pdf
üdv.
http://lum_pen.tar.hu/egyeb/berger.pdf
üdv.
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2006 május 16, 07:41
Írta: 4mjnxdwuu Dátum 2006 május 16, 07:41
Köszike
de a Nm hiányában úgy néz ki vissza adom a mocikat, de ha később tudok időt szakítani a dologra, lehet róla szó.
Üdv.
de a Nm hiányában úgy néz ki vissza adom a mocikat, de ha később tudok időt szakítani a dologra, lehet róla szó.
Üdv.
Cím: Re:Léptetőmotor
Írta: nv5firipz Dátum 2006 május 16, 09:50
Írta: nv5firipz Dátum 2006 május 16, 09:50
Sziasztok!
Azt szeretném kérdezni, hogy nagy méretű motorokat miből lehet kitermelni? Nézegettem mátrixnyomtatókat, de azokban is elég kisméretű motor van.
Köszi
Azt szeretném kérdezni, hogy nagy méretű motorokat miből lehet kitermelni? Nézegettem mátrixnyomtatókat, de azokban is elég kisméretű motor van.
Köszi
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2006 május 16, 17:50
Írta: 4mjnxdwuu Dátum 2006 május 16, 17:50
Helló
ebalint!
Nm-ről adatokat még mindíg nem tudtam szerezni, de volt egy kis időm játszani a mocikkal, elég erős!!
ebalint!
Nm-ről adatokat még mindíg nem tudtam szerezni, de volt egy kis időm játszani a mocikkal, elég erős!!
Cím: Re:Léptetőmotor
Írta: ebalint Dátum 2006 május 16, 18:33
Írta: ebalint Dátum 2006 május 16, 18:33
Szia Trapista!
Vezérlőd is van megfelelő, vagy "csak úgy" próbálgatod?
Gyári 5 fázisú vezérlőt találni a Neten, de elég drága lehet.
Üdv.
Vezérlőd is van megfelelő, vagy "csak úgy" próbálgatod?
Gyári 5 fázisú vezérlőt találni a Neten, de elég drága lehet.
Üdv.
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2006 május 17, 06:31
Írta: 4mjnxdwuu Dátum 2006 május 17, 06:31
Szia ebalint.
/egyenlőre csak 1 fázis kapott vezérlést fgenerátorról + fet 3x tápot. Jövőhéten tudom meg lesz-e gyári vezérlésem. Ha nem, nincs más hátra, programozni kell./ -Csak azt nem most.--
Üdv.
/egyenlőre csak 1 fázis kapott vezérlést fgenerátorról + fet 3x tápot. Jövőhéten tudom meg lesz-e gyári vezérlésem. Ha nem, nincs más hátra, programozni kell./ -Csak azt nem most.--
Üdv.
Cím: Re:Léptetőmotor
Írta: ebalint Dátum 2006 május 17, 06:40
Írta: ebalint Dátum 2006 május 17, 06:40
Szia!
Úgy látom, hogy Te is elég korán kelő vagy.
Ha vezérlésügyileg előbbre léptél, jelezd az eredményt.
Üdv, ebalint
Úgy látom, hogy Te is elég korán kelő vagy.
Ha vezérlésügyileg előbbre léptél, jelezd az eredményt.
Üdv, ebalint
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 27, 23:50
Írta: 000000000 Dátum 2006 május 27, 23:50
Halihóó!
cserélek egy léptetőmotort (nem vodkára!) és a réginek a tengelyére ragasztva van a fogazott tárcsa. A csigabigára nem jön le hiába énekelgetem. Gondoltam megmelengetem kicsinyég, de félek, hogy a mágnesessége megszökik. Mit tegyek, hogy a kecskés káposztás figura megvalósuljon?
Izgatottan várom a tengersok választ.
Üdv: Karsa István
cserélek egy léptetőmotort (nem vodkára!) és a réginek a tengelyére ragasztva van a fogazott tárcsa. A csigabigára nem jön le hiába énekelgetem. Gondoltam megmelengetem kicsinyég, de félek, hogy a mágnesessége megszökik. Mit tegyek, hogy a kecskés káposztás figura megvalósuljon?
Izgatottan várom a tengersok választ.
Üdv: Karsa István
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 28, 08:29
Írta: 000000000 Dátum 2006 május 28, 08:29
Egy másik, hogy ne legyen unalom!
Létezik olyan, hogy a léptetőmotor rotorjának a tengelye megforog a rotorban?
A következőt tapasztalom:
Az axis gyorsjáratánál (többféle sebesség próbálva) a hajtás megáll, de a motor hangja változatlan, én ugy tapasztalom, hogy bent a rotor test tovább pörög. Megállítom majd ujra indítom, kezdetben hajt asztán megint ugyanez mindkét irányba.
Létezik az, hogy én minden létező és létezhetetlen problémával találkozok?
Már a kalapos melletünk akar boltot nyitni, annyi kalapot szétrugdostam mérgemben.
Üdv néktek, kiknek müködik a masinájuk, ellentétben velem. Már gondoltam a Szent Antalnak viendő adomány jelentős mértékű felemelésén is.
Létezik olyan, hogy a léptetőmotor rotorjának a tengelye megforog a rotorban?
A következőt tapasztalom:
Az axis gyorsjáratánál (többféle sebesség próbálva) a hajtás megáll, de a motor hangja változatlan, én ugy tapasztalom, hogy bent a rotor test tovább pörög. Megállítom majd ujra indítom, kezdetben hajt asztán megint ugyanez mindkét irányba.
Létezik az, hogy én minden létező és létezhetetlen problémával találkozok?
Már a kalapos melletünk akar boltot nyitni, annyi kalapot szétrugdostam mérgemben.
Üdv néktek, kiknek müködik a masinájuk, ellentétben velem. Már gondoltam a Szent Antalnak viendő adomány jelentős mértékű felemelésén is.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 28, 08:35
Írta: 000000000 Dátum 2006 május 28, 08:35
Ja, és a motor látszólag nem gagyi. A tipusa : Nanotec-Munich 4T5628S2404-A , 3.6A 1.25V. Esetleg létezne benne egy nyomaték kuplung?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 28, 08:51
Írta: 000000000 Dátum 2006 május 28, 08:51
Én egyszer találkoztam ilyennel, de az egy Robotron motor volt (a gyűrümágnes csúszott meg a két vaskoszorú között). Nem csak a hangja olyan mint ha menne (fütyülhet álló motorral is)?!
A másik két motor rendben megy azon a sebességen (persze ez csak akkor érdekes, ha a fékező nyomaték is egyforma)?
A másik két motor rendben megy azon a sebességen (persze ez csak akkor érdekes, ha a fékező nyomaték is egyforma)?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 28, 09:20
Írta: 000000000 Dátum 2006 május 28, 09:20
lócsöcs terhelés sincs rajta. A Z-t kéne forgatnia üresen. Bár az ékszij talán kicsit feszes. A másik kettő megy mint az ördög.
Ha szétszedem (mert kivűlről nem tudom megállapítani hogy megforog-e, nem mén el a delej?
Ha szétszedem (mert kivűlről nem tudom megállapítani hogy megforog-e, nem mén el a delej?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 28, 09:24
Írta: 000000000 Dátum 2006 május 28, 09:24
ne3m füttyög, hanem ugyanolyan hangja van mintha hajtana. Csak amikor lelassul és ujra hajtani kezd akkor van bizonyos hangváltozás.
A sebeséggel meg nem lehet baj, mert állítgattam a fordulaton le is föl is és kis sebességnél is jelentkezik a csoda.
A sebeséggel meg nem lehet baj, mert állítgattam a fordulaton le is föl is és kis sebességnél is jelentkezik a csoda.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 28, 09:27
Írta: 000000000 Dátum 2006 május 28, 09:27
Ja és még nem melengettem meg a tengelyt, mert várom az irástudók válaszát, tehát az nem okozhatja a problemát, hogy olvadásig melengettem. Ez szüzen most lett berakva, bár kéz alól vettem, de novolás újnak tünik.
Leht, hogy indulásból utál, és nem akar nekem dolgozni.
Leht, hogy indulásból utál, és nem akar nekem dolgozni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 28, 09:56
Írta: 000000000 Dátum 2006 május 28, 09:56
Szerintem sedd szét, sokat nem veszthetsz vele, ha eleve gyanus!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 28, 09:58
Írta: 000000000 Dátum 2006 május 28, 09:58
Egy biztos, az állandó mágnes nem szereti ha megmelegítik, de az üzemi hőfokig (kb. 100°C-ig) bírnia kell, hisz ez üzemszerűen is előfordulhat!
A tengelyt nyakban nem tudod meghűteni valamibel?
A tengelyt nyakban nem tudod meghűteni valamibel?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 28, 10:00
Írta: 000000000 Dátum 2006 május 28, 10:00
Esetleg mikro flex-el (azt amiket a gravírozóba be lehet fogni) vágd be hosszába és így már lehúzható!
Cím: Re:Léptetőmotor
Írta: sasi Dátum 2006 május 28, 10:06
Írta: sasi Dátum 2006 május 28, 10:06
Szia István!
Miközben ismerkedtem a motor tuninggal, nálam is fellépett az általad leírt jelenség, teljesen terheletlen motoroknál. A mágneses tét körbejárt – a hozzá tartozó hanggal, miközben megáll a forgórész. Arra már nem emlékszem, melyik paramétert szúrtam el.
Hő hatására a mágnes elvesztheti az erejét, de az nagyon magas hőmérséklet (Curie pont). A Loctite csapágyrögzítő oldási hőmérsékletét ugyan nem ismerem, de én csapágylehúzóval úgy szoktam ilyesmit levenni, hogy közben szúró lánggal melegítem a tárcsát.
A motor szétszedéssel kapcsolatban saját tapasztalatom van, - és ezt korábban mások írói munkásságának tekintettem -, mármint a motor jelentős teljesítmény csökkenését tapasztaltam (amit motor tuninggal majdnem korrigálni lehet!
sasi
Miközben ismerkedtem a motor tuninggal, nálam is fellépett az általad leírt jelenség, teljesen terheletlen motoroknál. A mágneses tét körbejárt – a hozzá tartozó hanggal, miközben megáll a forgórész. Arra már nem emlékszem, melyik paramétert szúrtam el.
Hő hatására a mágnes elvesztheti az erejét, de az nagyon magas hőmérséklet (Curie pont). A Loctite csapágyrögzítő oldási hőmérsékletét ugyan nem ismerem, de én csapágylehúzóval úgy szoktam ilyesmit levenni, hogy közben szúró lánggal melegítem a tárcsát.
A motor szétszedéssel kapcsolatban saját tapasztalatom van, - és ezt korábban mások írói munkásságának tekintettem -, mármint a motor jelentős teljesítmény csökkenését tapasztaltam (amit motor tuninggal majdnem korrigálni lehet!
sasi
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 28, 10:46
Írta: 000000000 Dátum 2006 május 28, 10:46
Ha motor kiesik a szinkronból, akkor a mégneses mező még tovább forog (hangja közel olyan mint ha menne a motor), de a motor nyomatéka szinte 0-ra leesik. Ez gyakorlatilag túlterhelés. A léptető motorok DC üzemmódban teljesen szinkronmotorként mennek (az indítási nyomatékuk helye és a letörési forgató nyomatékuk messze vannak egymástól).
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 28, 10:47
Írta: 000000000 Dátum 2006 május 28, 10:47
Sziasztok!
Tudom volt róla szó, de nincs most időm olvasgatni. Nektek hány fokra melegszik a motor marás közben?
Üdv nakva
Tudom volt róla szó, de nincs most időm olvasgatni. Nektek hány fokra melegszik a motor marás közben?
Üdv nakva
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 28, 10:48
Írta: 000000000 Dátum 2006 május 28, 10:48
60°C-ig ne aggódj! 100°C-felé semmiképp ne engedd!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 28, 11:23
Írta: 000000000 Dátum 2006 május 28, 11:23
Hol kezdjek aggódni?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 28, 11:26
Írta: 000000000 Dátum 2006 május 28, 11:26
60°C < aggódás < 100°C < pánik < poroltó
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 28, 13:19
Írta: 000000000 Dátum 2006 május 28, 13:19
Köszönöm a segítséget!
Valószinű az Istvánnsk van igaza, a mágneses forgómező döngicsélésével. Szétszedtem, megqqcskáltam, de machanikai hiba nem van benne. Viszont amikor összeraktam érezhetően kissebb erővel lehetett körbeforgatni mint a testvérét, mintha a mágneses erő egy része megszökött volna belölle. De mikor újra üzembehelyeztem nem tapasztalom gyengébbnek mint volt. A motor állítgatásával egyszercsak megszünt a megakadás. Ugyhogy most úgy tűnik jó. A másik motorról a tárcsát újra felakarom használni, tehát nem akarom töntretenni. Melegíteni még nem mertem. Ha elszánom magam akkor leírom a tapasztalatokat.
Még 1xköszönöm az urak közreműködését.
Üdv. Karsa István
Valószinű az Istvánnsk van igaza, a mágneses forgómező döngicsélésével. Szétszedtem, megqqcskáltam, de machanikai hiba nem van benne. Viszont amikor összeraktam érezhetően kissebb erővel lehetett körbeforgatni mint a testvérét, mintha a mágneses erő egy része megszökött volna belölle. De mikor újra üzembehelyeztem nem tapasztalom gyengébbnek mint volt. A motor állítgatásával egyszercsak megszünt a megakadás. Ugyhogy most úgy tűnik jó. A másik motorról a tárcsát újra felakarom használni, tehát nem akarom töntretenni. Melegíteni még nem mertem. Ha elszánom magam akkor leírom a tapasztalatokat.
Még 1xköszönöm az urak közreműködését.
Üdv. Karsa István
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 28, 18:51
Írta: 000000000 Dátum 2006 május 28, 18:51
Csaba!
Küldtem választ az érdeklődésedre, de nem kaptam semmilyen visszajelzést. Nem szeretném, ha komolytalannak lennék a beállítva a késöbbiekben.
Bocsánatot kérek a többiektől, hogy ide írok de erre mindenki figyeljen a külön -háttérben- történő levelezésekben.
Üdv mindenkinek
balkari
Küldtem választ az érdeklődésedre, de nem kaptam semmilyen visszajelzést. Nem szeretném, ha komolytalannak lennék a beállítva a késöbbiekben.
Bocsánatot kérek a többiektől, hogy ide írok de erre mindenki figyeljen a külön -háttérben- történő levelezésekben.
Üdv mindenkinek
balkari
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 30, 12:03
Írta: 000000000 Dátum 2006 május 30, 12:03
Sziasztok
Melyik gyártótól ajánlotok 2-3 nm-es új léptetőmotorokat. Hol nézzek körül.
Köszi: Zoli
Melyik gyártótól ajánlotok 2-3 nm-es új léptetőmotorokat. Hol nézzek körül.
Köszi: Zoli
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 május 30, 15:22
Írta: 000000000 Dátum 2006 május 30, 15:22
Szia Mick, mármint Jagger!
A stappenmotor.nl holland cégnél jó áron kaphatsz léptecseket. Nekem most fut náluk egy rendelésem.
A stappenmotor.nl holland cégnél jó áron kaphatsz léptecseket. Nekem most fut náluk egy rendelésem.
Cím: Re:Léptetőmotor
Írta: cv4yrkgc Dátum 2006 június 09, 11:55
Írta: cv4yrkgc Dátum 2006 június 09, 11:55
Hello azt lenne a kérdésem hogy tudtok-e valami boltot vagy honlapot ahol ujonnan lehet léptetőmotororat beszerezni. Remélem tudtok nekem segíteni.Köszi
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 09, 13:04
Írta: 000000000 Dátum 2006 június 09, 13:04
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 09, 13:32
Írta: 000000000 Dátum 2006 június 09, 13:32
Sziasztok!
Ma megkaptam a hollandusoktól rendelt léptecsei- met. Méltóztatnak működni annak ellenére, hogy felébe kerültek annak, mintha máshol pl. a labancoknál vagy itthon vettem volna őket.
Blizzard: ajánlom a stappenmotor.nl site-ot.
Ma megkaptam a hollandusoktól rendelt léptecsei- met. Méltóztatnak működni annak ellenére, hogy felébe kerültek annak, mintha máshol pl. a labancoknál vagy itthon vettem volna őket.
Blizzard: ajánlom a stappenmotor.nl site-ot.
Cím: Re:Léptetőmotor
Írta: nv5firipz Dátum 2006 június 09, 14:10
Írta: nv5firipz Dátum 2006 június 09, 14:10
Szia Géza!
Tudnál adni infókat a rendelésről? Konkrétan milyen típus, postaköltség, jött-e valami +költség a cumóra.
Köszi
Tudnál adni infókat a rendelésről? Konkrétan milyen típus, postaköltség, jött-e valami +költség a cumóra.
Köszi
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 09, 14:32
Írta: 000000000 Dátum 2006 június 09, 14:32
Szisztok!
Nekem kellenének nagyok a hollandusoktól.
RENDELJÜK EGYÜTT [#felkialtas]!!!
Így megoszlik a postaköltség!
(Úgy tudom, 19% ott az áfa)
Csatlakozzatok! Én lebonyolítom [#nevetes1].
Nekem kellenének nagyok a hollandusoktól.
RENDELJÜK EGYÜTT [#felkialtas]!!!
Így megoszlik a postaköltség!
(Úgy tudom, 19% ott az áfa)
Csatlakozzatok! Én lebonyolítom [#nevetes1].
Cím: Re:Léptetőmotor
Írta: nv5firipz Dátum 2006 június 09, 15:26
Írta: nv5firipz Dátum 2006 június 09, 15:26
Nekem van egy félig kész mechanikám, és van hozzá 3 robotron motor. Előbb azt kellene összerakni, és eladni. Utána mindenképp szeretnék venni nagyon bika motorokat. Jónak néz ki ez a hely. valszeg tőlük lesz csak a kélrdés, hogy mikor.
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2006 június 09, 15:33
Írta: D.Laci Dátum 2006 június 09, 15:33
A postaköltségről va egy táblázat!
postaköltség
postaköltség
Cím: Re:Léptetőmotor
Írta: nv5firipz Dátum 2006 június 09, 16:27
Írta: nv5firipz Dátum 2006 június 09, 16:27
Köszi.
Remélem, hogy ennyi az össz költség.
Remélem, hogy ennyi az össz költség.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 09, 19:51
Írta: 000000000 Dátum 2006 június 09, 19:51
Sziasztok!
A cég: Deitech Computers B.V.
Veenhuitzerveldweg 21
3881 RE Putten, Holland
Én egy Harrie nevű fickóval levelezgettem
Postaköltségek magyarországra: 0-2 kg 17 pénz,
2-5 kg 22 pénz (az én esetem), 5-10 kg 28 pénz
(pénz alatt Eurót értek) Álljatok össze, úgy gazdaságosabb. Ha kell rám hivatkozhattok. Ha nem tudtok angolul vagy németül, segítek.
A cég: Deitech Computers B.V.
Veenhuitzerveldweg 21
3881 RE Putten, Holland
Én egy Harrie nevű fickóval levelezgettem
Postaköltségek magyarországra: 0-2 kg 17 pénz,
2-5 kg 22 pénz (az én esetem), 5-10 kg 28 pénz
(pénz alatt Eurót értek) Álljatok össze, úgy gazdaságosabb. Ha kell rám hivatkozhattok. Ha nem tudtok angolul vagy németül, segítek.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 09, 19:59
Írta: 000000000 Dátum 2006 június 09, 19:59
Sziasztok mégegyszer!
Elfelejtettem mondani, hogy motorok gyártója "no name" (valószínűleg kínai vagy paki). De hiszen mi az amit nem ők gyártanak?
Elfelejtettem mondani, hogy motorok gyártója "no name" (valószínűleg kínai vagy paki). De hiszen mi az amit nem ők gyártanak?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 09, 20:55
Írta: 000000000 Dátum 2006 június 09, 20:55
Géza! A feltüntetett árak áfásak?
Üdv:Laci
Üdv:Laci
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 09, 23:42
Írta: 000000000 Dátum 2006 június 09, 23:42
A Nm adatokat 1 vagy 2 fázisra érti?
üdv jános
üdv jános
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 10, 08:13
Írta: 000000000 Dátum 2006 június 10, 08:13
Szia Szaki!
Biztos, hogy bipolárisan. Ezek hibrid motorok.
Az ár meg szerintem nettó, bár itt nem jelölik, de a kiegészítőknél (kerekek, szíjak) igen.
Biztos, hogy bipolárisan. Ezek hibrid motorok.
Az ár meg szerintem nettó, bár itt nem jelölik, de a kiegészítőknél (kerekek, szíjak) igen.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 10, 09:11
Írta: 000000000 Dátum 2006 június 10, 09:11
Hogyan fizettél (banki átutalással, vagy egyéb módon)?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 10, 10:42
Írta: 000000000 Dátum 2006 június 10, 10:42
Yes, az árak már tartalmazzák a holland 19 %-os áfát. Ehhez kell plusszolnod azt a szállítási költséget amelyet a 485-ös üzimben írtam.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 10, 10:46
Írta: 000000000 Dátum 2006 június 10, 10:46
Szaki + Szobrász!
A léptecseket leíró PDF pontosan elmagyarázza, hogy mi történik az áram és nyomaték vonatkozásában, ha az egyes kanócokat különböző variban összekötitek.
A léptecseket leíró PDF pontosan elmagyarázza, hogy mi történik az áram és nyomaték vonatkozásában, ha az egyes kanócokat különböző variban összekötitek.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 10, 13:13
Írta: 000000000 Dátum 2006 június 10, 13:13
Remek! tehát a feltüntetett ár bruttó.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 10, 13:37
Írta: 000000000 Dátum 2006 június 10, 13:37
Uraim!
Léptetőmotorokat (de van más is) rendelünk!
ITT MEGTALÁLTOK MINDENT!!! (bruttó vég árak!)
Ha a szállítási költségen megosztozunk, nagyon megéri!!
A nagy csomag a legjobb, úgyhogy érdemes ÖSSZEFOGNI! (3 Kg pl.: 22 Euro volt, a 31.5 Kg-os viszont 48,25 Euro!!!)
SZÁMOLNI URAK!!!
A postán osztozunk. Minden azon múlik, hogy hányan leszünk összesen.
Továbbra is vállalom a szervezést (hisz én úgyis rendelek).
Mindenki döntse el, mit is szeretne, és jelezze
Jövő hét végéig!!!
Akkor zárom és megy a rendelés [#email]!
Üdvözletem mindenkinek! Döntsetek minél hamarabb![#nevetes1]
Léptetőmotorokat (de van más is) rendelünk!
ITT MEGTALÁLTOK MINDENT!!! (bruttó vég árak!)
Ha a szállítási költségen megosztozunk, nagyon megéri!!
A nagy csomag a legjobb, úgyhogy érdemes ÖSSZEFOGNI! (3 Kg pl.: 22 Euro volt, a 31.5 Kg-os viszont 48,25 Euro!!!)
SZÁMOLNI URAK!!!
A postán osztozunk. Minden azon múlik, hogy hányan leszünk összesen.
Továbbra is vállalom a szervezést (hisz én úgyis rendelek).
Mindenki döntse el, mit is szeretne, és jelezze
Jövő hét végéig!!!
Akkor zárom és megy a rendelés [#email]!
Üdvözletem mindenkinek! Döntsetek minél hamarabb![#nevetes1]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 10, 19:31
Írta: 000000000 Dátum 2006 június 10, 19:31
Szia Szobrász!
Küldtem levelet.
Üdv:
molyoló
Küldtem levelet.
Üdv:
molyoló
Cím: Re:Léptetőmotor
Írta: cv4yrkgc Dátum 2006 június 11, 00:17
Írta: cv4yrkgc Dátum 2006 június 11, 00:17
Köszi a tippeket
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 11, 09:12
Írta: 000000000 Dátum 2006 június 11, 09:12
Szia.
Ahogy nézegetem ezek mind 2-fázisú 8.kivezetéses motorok ha az egyik tekercsvégeket öszekötöm akkor tudom használni a Profi 1 vezérlőhőz ugye?
Ahogy nézegetem ezek mind 2-fázisú 8.kivezetéses motorok ha az egyik tekercsvégeket öszekötöm akkor tudom használni a Profi 1 vezérlőhőz ugye?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 11, 10:01
Írta: 000000000 Dátum 2006 június 11, 10:01
Igen, nézd meg a Léptetőmotorok menü végén a módszert!
Cím: Re:Léptetőmotor
Írta: cv4yrkgc Dátum 2006 június 11, 13:30
Írta: cv4yrkgc Dátum 2006 június 11, 13:30
Annyi lenne még a kérdésem hogy egy hobby géphez ami fából készül körülbelül milyen erős motorok kellemek?? Jah és egy kicsit testesebb maróval szeretném majd használni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 12, 09:21
Írta: 000000000 Dátum 2006 június 12, 09:21
Szia Hófergeteg (azaz Blizzard)!
Szerintem fa kütyűnél a "testesebb" maró használatáról mondj le! Se a fa, főképp pedig a normál fióksín nem bírja a gyötrést. Pláne akkor, ha már olyan területen marsz ahol az asztal alátámasztása alól már kifutott a golyósszán. Persze lehet igen erős fa konstruk- ciót is csinálni 30 mm-es MDF, vagy rétegelt keményfa vázzal és 50-60 mm széles, csapágyakkal megtámasztott, kb. 50 kilós fióksínekkel is. De gondolom neked nem ilyen van. Ha a menetorsó emelkedése nem nagy és az előtolást sem veszed túl brutálisra, akkor már kb. 1 Nm-es motorral és max 4 mm-es maróval akár alut is marhatsz, de csak egy ilyen "megpatkolt" gépen. További gond a menetes szár, mert igazán az sem bírja a gyűrődést. Abból is jobb, ha 14, uszkve 16 mm-est használsz.
Szerintem fa kütyűnél a "testesebb" maró használatáról mondj le! Se a fa, főképp pedig a normál fióksín nem bírja a gyötrést. Pláne akkor, ha már olyan területen marsz ahol az asztal alátámasztása alól már kifutott a golyósszán. Persze lehet igen erős fa konstruk- ciót is csinálni 30 mm-es MDF, vagy rétegelt keményfa vázzal és 50-60 mm széles, csapágyakkal megtámasztott, kb. 50 kilós fióksínekkel is. De gondolom neked nem ilyen van. Ha a menetorsó emelkedése nem nagy és az előtolást sem veszed túl brutálisra, akkor már kb. 1 Nm-es motorral és max 4 mm-es maróval akár alut is marhatsz, de csak egy ilyen "megpatkolt" gépen. További gond a menetes szár, mert igazán az sem bírja a gyűrődést. Abból is jobb, ha 14, uszkve 16 mm-est használsz.
Cím: Re:Léptetőmotor
Írta: cv4yrkgc Dátum 2006 június 12, 11:11
Írta: cv4yrkgc Dátum 2006 június 12, 11:11
Köszi a tippeket. Azért remélem a fióksinek bírni fogják mivel tengelyenként 4et építettem be.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 12, 15:47
Írta: 000000000 Dátum 2006 június 12, 15:47
Blizzard!
Az eredeti problémán még a 4 fióksín sem segít! Egy amcsi site-on olvastam mindenféle trükköket a fióksínekkel kapcsolatban. Ott is 4-4 db sínt építettek be, ráadásul egymástól 90 fokosan elfordított beállításban. Ők is arra a következtetésre jutottak, hogy a fióksín csak addig OK, amig a megmunkálás a golyóskocsik alatti területen történik. Például ha kb. 100 X 100-as területen belül marsz. Utána jön a gáz a beremegés és vibráció következtében. Sajnos ez a megoldás merevség szempontjából közelébe sem jön a acélsínes vagy tengelyes megoldásnak.
Az eredeti problémán még a 4 fióksín sem segít! Egy amcsi site-on olvastam mindenféle trükköket a fióksínekkel kapcsolatban. Ott is 4-4 db sínt építettek be, ráadásul egymástól 90 fokosan elfordított beállításban. Ők is arra a következtetésre jutottak, hogy a fióksín csak addig OK, amig a megmunkálás a golyóskocsik alatti területen történik. Például ha kb. 100 X 100-as területen belül marsz. Utána jön a gáz a beremegés és vibráció következtében. Sajnos ez a megoldás merevség szempontjából közelébe sem jön a acélsínes vagy tengelyes megoldásnak.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 12, 23:45
Írta: 000000000 Dátum 2006 június 12, 23:45
Üdv!
[#felkialtas]még be lehet szállni a léptetőmotor rendelésbe [#felkialtas]
[#heureka] #494 hozzászólás
Áron
[#felkialtas]még be lehet szállni a léptetőmotor rendelésbe [#felkialtas]
[#heureka] #494 hozzászólás
Áron
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 14, 17:05
Írta: 000000000 Dátum 2006 június 14, 17:05
Sziasztok, elhozatom a motorokat, nem lesz posta!
Üdv:
Áron
Üdv:
Áron
Cím: Re:Léptetőmotor
Írta: cv4yrkgc Dátum 2006 június 15, 12:15
Írta: cv4yrkgc Dátum 2006 június 15, 12:15
Hello nem tudja valaki hogy ennek a motornak mennyi lehet a forgatónyomatéka???

Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 15, 12:17
Írta: 000000000 Dátum 2006 június 15, 12:17
Kb. 0.5-0.6 Nm-es lehet.
Cím: Re:Léptetőmotor
Írta: cv4yrkgc Dátum 2006 június 15, 17:14
Írta: cv4yrkgc Dátum 2006 június 15, 17:14
köszönöm. gondolom akkor egy kisseb géphez elég egy ilyen motor!?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 15, 17:23
Írta: 000000000 Dátum 2006 június 15, 17:23
Szia!
Szerintem mindenképpen, de akár nagobbhoz is Z-nek átételezve.
Szerintem mindenképpen, de akár nagobbhoz is Z-nek átételezve.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 15, 17:23
Írta: 000000000 Dátum 2006 június 15, 17:23
Bocs: áttételezve..
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2006 június 23, 08:01
Írta: Motoros Dátum 2006 június 23, 08:01
Sziasztok!
Van egy pár léptetőmotorom, régi öreg bontott, kb legalább 10- 15 évesek. Azt tapasztalom hogy kis fordulaton is rendkivűl gyengék. Persze lehet hogy ezek csak ezt tudják, de szerintem inkább az idő múlásával lemágneseződtek.
Hogy lehetne ezeket felmágnesezni, vagy valami próbapadon bemérni hogy jók e valamire még?
Az volna az igazi ha a saját tekercsükkel fel lehetne gerjeszteni , de gondolom ez nem fog menni ehhez ez kevés--mármint a térerő ami létrejöhet így.
Van egy pár léptetőmotorom, régi öreg bontott, kb legalább 10- 15 évesek. Azt tapasztalom hogy kis fordulaton is rendkivűl gyengék. Persze lehet hogy ezek csak ezt tudják, de szerintem inkább az idő múlásával lemágneseződtek.
Hogy lehetne ezeket felmágnesezni, vagy valami próbapadon bemérni hogy jók e valamire még?
Az volna az igazi ha a saját tekercsükkel fel lehetne gerjeszteni , de gondolom ez nem fog menni ehhez ez kevés--mármint a térerő ami létrejöhet így.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 28, 19:05
Írta: 000000000 Dátum 2006 június 28, 19:05
Szia Géza!
Én ezt nem tudom, szerintem nincs még pontos díjszabásuk. Magyar, tehát logikus, hogy forint lesz. Nekem azt mondták (illetve egy fórumtársunk írta), hogy olcsók akarnak maradni!
Szóval minden rendben a holland motorjaiddal?
Az JÓ! Én is várom már nagyon, kiváncsi vagyok arra a 6,4 Nm-re. Bitang erő! [#finom] Majd beszámolok a tapasztalatokról.
Én ezt nem tudom, szerintem nincs még pontos díjszabásuk. Magyar, tehát logikus, hogy forint lesz. Nekem azt mondták (illetve egy fórumtársunk írta), hogy olcsók akarnak maradni!
Szóval minden rendben a holland motorjaiddal?
Az JÓ! Én is várom már nagyon, kiváncsi vagyok arra a 6,4 Nm-re. Bitang erő! [#finom] Majd beszámolok a tapasztalatokról.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 29, 18:03
Írta: 000000000 Dátum 2006 június 29, 18:03
Semmi baj a holland mocikkal. Ne felejtsd a bitang erő (6,4 Nm) csak bipoláris módban állna a rendel- kezésedre. Unipoláris (pl. PROFI1) vezérlővel ennek a "kajaknak" csupán a 70%-át kapod majd!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 29, 19:14
Írta: 000000000 Dátum 2006 június 29, 19:14
Még az is megtart egy dinnyét 10 cm-s erőkaron [#finom]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 június 30, 07:50
Írta: 000000000 Dátum 2006 június 30, 07:50
A dinnyék emelgetéséhez még motor sem kell. Csinálsz deszkából egy libikókát. Rálépsz és a dinnye már a magasban is van.
Cím: Re:Léptetőmotor
Írta: mfrfj8vv3 Dátum 2006 július 16, 10:13
Írta: mfrfj8vv3 Dátum 2006 július 16, 10:13
Sziasztok !
Éppen szerelgetem össze a KIT gépemet, és közben felmerült bennem egy kérdés.
A menetes orsók a motorral átellenes végeiken teflon perselyekben vannak megvezetve. Ennek kialakítása miatt az axiális nyomó erőket is felveszi. Az ellenkező irányú (motor felé irányuló) axiális erőket viszont nincs ami felvegye, ilyen szerkezeti elem nincsen a cuccban. Vagyis a megmunkálás során a menetes hajtáson keletkező, a motor irányába ható axiális erőket a léptetőmotor csapágyazásának kell felvennie . Jó ez így ? Szabad ilyennek lennie ? Vagy jobban járok ha, alakítok bele valamit ?...Segítsetek kitalálni! Köszi .
Éppen szerelgetem össze a KIT gépemet, és közben felmerült bennem egy kérdés.
A menetes orsók a motorral átellenes végeiken teflon perselyekben vannak megvezetve. Ennek kialakítása miatt az axiális nyomó erőket is felveszi. Az ellenkező irányú (motor felé irányuló) axiális erőket viszont nincs ami felvegye, ilyen szerkezeti elem nincsen a cuccban. Vagyis a megmunkálás során a menetes hajtáson keletkező, a motor irányába ható axiális erőket a léptetőmotor csapágyazásának kell felvennie . Jó ez így ? Szabad ilyennek lennie ? Vagy jobban járok ha, alakítok bele valamit ?...Segítsetek kitalálni! Köszi .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 július 16, 11:03
Írta: 000000000 Dátum 2006 július 16, 11:03
Szia Zoltán!
Egyáltalán nem jó a megoldás és csak igen kis axiális terhelések esetén elfogadható! A teflon összenyomható, de a két végén valószínüleg golyóscsapágyakkal ellátott léptecseket sem ajánlatos nagyobb axiális erőkkel terhelni. A legjobb megoldás az, ha a léptecs oldalán un. "supported" csapágyazást alakítsz ki minimum két golyóscsapágyból, melyeknek mind a külső mind pedig a belső gyűrűjét összehúzatod. Természetesen még sokkal jobb ha ezen az oldalon axiálisan terhelhető golyós vagy, ami mégjobb, görgős csapágyakat használsz. Nekem van egy THK katalógusom ahol számos "orsóbekötési" tachnika látható. Természetesen minden szempontból a legjobb az un "feszített" orsó amelynél mindkét oldal keményen meg van fogva. Ez azonban nem minden esetben szükséges. Hobby célokra elég csak a léptecs oldalát megfogni és a másik oldalt un. "úszó" csapágyazással elkészíteni. A teflonos megoldás is csak akkor jó, ha az az oldal csak "úszó" megvezetésre és nem az axiális erők felvételére szolgál.
Egyáltalán nem jó a megoldás és csak igen kis axiális terhelések esetén elfogadható! A teflon összenyomható, de a két végén valószínüleg golyóscsapágyakkal ellátott léptecseket sem ajánlatos nagyobb axiális erőkkel terhelni. A legjobb megoldás az, ha a léptecs oldalán un. "supported" csapágyazást alakítsz ki minimum két golyóscsapágyból, melyeknek mind a külső mind pedig a belső gyűrűjét összehúzatod. Természetesen még sokkal jobb ha ezen az oldalon axiálisan terhelhető golyós vagy, ami mégjobb, görgős csapágyakat használsz. Nekem van egy THK katalógusom ahol számos "orsóbekötési" tachnika látható. Természetesen minden szempontból a legjobb az un "feszített" orsó amelynél mindkét oldal keményen meg van fogva. Ez azonban nem minden esetben szükséges. Hobby célokra elég csak a léptecs oldalát megfogni és a másik oldalt un. "úszó" csapágyazással elkészíteni. A teflonos megoldás is csak akkor jó, ha az az oldal csak "úszó" megvezetésre és nem az axiális erők felvételére szolgál.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 július 16, 11:13
Írta: 000000000 Dátum 2006 július 16, 11:13
Helló!
Nem értem miért bajlódtok a hajtásal mikor ha az orsó lötyög az baj ,ha megfeszited az orsót akkor meg a motor nembirja mozgatni!No meg persze a kúpgörgős csapágy is drága.Az én meglátásom szerint egyszerűbb és könyebb megoldás ha az anyát hajtod meg, az én gépemen így van mert hasonló volt a problémám,így a robotron mocik is meghajtották 1600mm/percel a 2x1m és gépet!!
[#vigyor2][#vigyor3][#gonosz2]
Nem értem miért bajlódtok a hajtásal mikor ha az orsó lötyög az baj ,ha megfeszited az orsót akkor meg a motor nembirja mozgatni!No meg persze a kúpgörgős csapágy is drága.Az én meglátásom szerint egyszerűbb és könyebb megoldás ha az anyát hajtod meg, az én gépemen így van mert hasonló volt a problémám,így a robotron mocik is meghajtották 1600mm/percel a 2x1m és gépet!!
[#vigyor2][#vigyor3][#gonosz2]
Cím: Re:Léptetőmotor
Írta: mfrfj8vv3 Dátum 2006 július 16, 11:14
Írta: mfrfj8vv3 Dátum 2006 július 16, 11:14
Köszi, értem.
Akkor alakítok kicsit a cuccon. hiába az ígért gari, ha már elvben sem jó így a megoldás...
Akkor alakítok kicsit a cuccon. hiába az ígért gari, ha már elvben sem jó így a megoldás...
Cím: Re:Léptetőmotor
Írta: mfrfj8vv3 Dátum 2006 július 16, 12:37
Írta: mfrfj8vv3 Dátum 2006 július 16, 12:37
Szia . Ez sem egy rossz ötlet , sőt. Azonban túl nagy átalakítást igényelne a meglévő cuccon. De sebaj, ha a következő gépemet magam építem, akkor majd eleve így gondolkozom :-)
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2006 július 16, 18:45
Írta: s5f8tmfv3 Dátum 2006 július 16, 18:45
Hello Maffia! Ez érdekelne. Van néhány képed róla?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 július 16, 19:05
Írta: 000000000 Dátum 2006 július 16, 19:05
Ez tényleg érdekes megoldás! Még ilyenről nem láttam infókat, szívesen vennénk néhány fotót![#taps]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 július 16, 22:14
Írta: 000000000 Dátum 2006 július 16, 22:14
Kicsit sötétvan odakint de remélem a lényeg látható!
Gondolkodtam küldjem e mert sajna a kérdéseimre nehezen kapok tőletek választ, de remélem a későbiekben ez nem így lessz!!?? ha nem értitek majd lerajzolom !akinek kel jelentkezzen!!



[#zavart1]
Gondolkodtam küldjem e mert sajna a kérdéseimre nehezen kapok tőletek választ, de remélem a későbiekben ez nem így lessz!!?? ha nem értitek majd lerajzolom !akinek kel jelentkezzen!!
[#zavart1]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 július 16, 22:20
Írta: 000000000 Dátum 2006 július 16, 22:20
Kicsit nagy lett a kép pedig 40x40pixeles! Bocsi[#wow3]
Ez úton köszöném meg a segitséget a gép elkészitéséhez:-D.Laci és Szakály Jani mesternek![#worship][#worship]
Merkel Géza barátomnak és persze Szobrásznak a mocikért![#eplus2]Meg a sok okos kérdésért a fórumnak!!
Köszönet Mindenkinek
Ez úton köszöném meg a segitséget a gép elkészitéséhez:-D.Laci és Szakály Jani mesternek![#worship][#worship]
Merkel Géza barátomnak és persze Szobrásznak a mocikért![#eplus2]Meg a sok okos kérdésért a fórumnak!!
Köszönet Mindenkinek
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 július 17, 12:47
Írta: 000000000 Dátum 2006 július 17, 12:47
Hali!
A fotón 'a mérete ellenére' nem, sok minden látszódik.[#circling]
Az anya meghajtása nagyon jól hangzik.
Ha a hajtás részről tudnál 1 képet felrakni csúcs lenne!
Köszi!
(ui:40x40pix???!!!)[#vigyor2]
A fotón 'a mérete ellenére' nem, sok minden látszódik.[#circling]
Az anya meghajtása nagyon jól hangzik.
Ha a hajtás részről tudnál 1 képet felrakni csúcs lenne!
Köszi!
(ui:40x40pix???!!!)[#vigyor2]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 július 17, 13:04
Írta: 000000000 Dátum 2006 július 17, 13:04
Emberek!
Maffi megoldása pofon egyszerű, csak egy kis fantázia kell hozzá! A a menetorsó mindkét oldalon meg van fogva, mig a mondjuk Y tengely mocija is a csúszószánra van szerelve és az onnan hajtja meg bordássszijas vagy láncáttétles módon a csapágyazott csavaranyát. Előnye ennek a megoldásnak, hogy nem kell forgatni az orsót ezért a kétoldali csapágyazás elmarad. A megoldás hátránya az, hogy most az Y tengely csúszórészének még egy plussz motor súlyát is cipelnie kell, ezenkívűl az egység szerelése is nehézkesebb. A forgó anya csapágyazását gondosan kell elkészíteni úgy, hogy az mint a radiális mint pedig az axiális terhelést jól bírja, ne kotyogjon, stb. Nem véletlenül használják csak ritkán ezt a megoldást.
Maffi megoldása pofon egyszerű, csak egy kis fantázia kell hozzá! A a menetorsó mindkét oldalon meg van fogva, mig a mondjuk Y tengely mocija is a csúszószánra van szerelve és az onnan hajtja meg bordássszijas vagy láncáttétles módon a csapágyazott csavaranyát. Előnye ennek a megoldásnak, hogy nem kell forgatni az orsót ezért a kétoldali csapágyazás elmarad. A megoldás hátránya az, hogy most az Y tengely csúszórészének még egy plussz motor súlyát is cipelnie kell, ezenkívűl az egység szerelése is nehézkesebb. A forgó anya csapágyazását gondosan kell elkészíteni úgy, hogy az mint a radiális mint pedig az axiális terhelést jól bírja, ne kotyogjon, stb. Nem véletlenül használják csak ritkán ezt a megoldást.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 július 17, 13:51
Írta: 000000000 Dátum 2006 július 17, 13:51
Nagyméretű gépeknél talán könyebb 'cipelni' a léptetőmotort mint megpörgetni egy testes orsót.
Hm?
Egy próbát megérne...
Hm?
Egy próbát megérne...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 július 17, 14:54
Írta: 000000000 Dátum 2006 július 17, 14:54
Köszi a képeket!
Kicsit belenyultam, hogy jobban áttekinthető legyen. Érdekes és tényleg ritka megoldás![#eljen]
Kicsit belenyultam, hogy jobban áttekinthető legyen. Érdekes és tényleg ritka megoldás![#eljen]
Cím: Re:Léptetőmotor
Írta: 5bzs27u7 Dátum 2006 július 17, 20:27
Írta: 5bzs27u7 Dátum 2006 július 17, 20:27
Üdv.
A megoldást már léptecsek tegelyén is alkalmazzák, mint forgó golyós anya.
Az ötlet kiválló.Mínt látom házilag is megoldható.Gratula.
A megoldást már léptecsek tegelyén is alkalmazzák, mint forgó golyós anya.
Az ötlet kiválló.Mínt látom házilag is megoldható.Gratula.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 július 17, 20:32
Írta: 000000000 Dátum 2006 július 17, 20:32
Igen! Erről beszéltem, már hónapokkal ezelőtt! Ezek szerint eredménnyel![#wink]
A megoldás nehézségét nem is a csapágyazás és a plusz motorsúly adja, hanem - amennyiben nagy gépek x tengelyét akarjátok mozgatni - a hajtás szinkronizálása, mivel itt két orsóval kell dolgozni, hogy ne tekeredjen el a mechanika!
A megoldás csak mechanikus lehet, mert a lépésvesztés itt katasztrofális is lehet, ha nincs szinkron.
Megoldás:
Az egész mozgó felépítmény közepén elhelyezett léptetőmotor -a tengelye az Y-nal párhuzamosan - aminek két tengelyvége van. A tengelyvégekre 1-1 alu cső, ami a mechanika egyig és másik végéig kilóg. Itt csapágyazni, fogas szíjkerék rá.
Az anya - nálam ez golyós - spéci esztergált házban van, csapágyazva, bordás szíjkerék ráhúzva.
Mármost: a spéci X anya (mindkét oldali orsón) merőleges az alu tengellyel hosszított X léptecs tengellyel!!!
Nem kel megijedni! Ha elég távol vannak egymástól, és nem túl kicsik a kerekek, a bordás szíj bírni fogja a tekeredést!
Így tökéletes a szinkron.
Persze kihagyható ez a kacifánt, ha a szinkronhoz csupán hosszú fogas szíjat használtok, csak az nyúlik... Ha mégis ez a szimpatikusabb, kettő "rövidebbet" használjatok! (a léptecs tengelye ekkor persze párhuzamos az X-el, és két kerék van rajta)
Okok:
Ha két szíj van, azonos a nyúlás mértéke mindkét forgási irányba. Ha pontosak akartok maradni, ez itt fontos, mert ha egy szíjjal hajtanátok a két X anyát, az egyiket éppen húzza, a másikat pedig "tolja" - értsd: a másik irányból húzza; ám ekkor a két húzási hossz nem azonos, így a nyúlás mértéke sem, tehát a mechanika tekeredik!
Üdv.: Áron
Ui.: "Ötletet másolni csak pontosan, szépen, ahogy a csillag megy az égen, úgy érdemes!" :-)
A megoldás nehézségét nem is a csapágyazás és a plusz motorsúly adja, hanem - amennyiben nagy gépek x tengelyét akarjátok mozgatni - a hajtás szinkronizálása, mivel itt két orsóval kell dolgozni, hogy ne tekeredjen el a mechanika!
A megoldás csak mechanikus lehet, mert a lépésvesztés itt katasztrofális is lehet, ha nincs szinkron.
Megoldás:
Az egész mozgó felépítmény közepén elhelyezett léptetőmotor -a tengelye az Y-nal párhuzamosan - aminek két tengelyvége van. A tengelyvégekre 1-1 alu cső, ami a mechanika egyig és másik végéig kilóg. Itt csapágyazni, fogas szíjkerék rá.
Az anya - nálam ez golyós - spéci esztergált házban van, csapágyazva, bordás szíjkerék ráhúzva.
Mármost: a spéci X anya (mindkét oldali orsón) merőleges az alu tengellyel hosszított X léptecs tengellyel!!!
Nem kel megijedni! Ha elég távol vannak egymástól, és nem túl kicsik a kerekek, a bordás szíj bírni fogja a tekeredést!
Így tökéletes a szinkron.
Persze kihagyható ez a kacifánt, ha a szinkronhoz csupán hosszú fogas szíjat használtok, csak az nyúlik... Ha mégis ez a szimpatikusabb, kettő "rövidebbet" használjatok! (a léptecs tengelye ekkor persze párhuzamos az X-el, és két kerék van rajta)
Okok:
Ha két szíj van, azonos a nyúlás mértéke mindkét forgási irányba. Ha pontosak akartok maradni, ez itt fontos, mert ha egy szíjjal hajtanátok a két X anyát, az egyiket éppen húzza, a másikat pedig "tolja" - értsd: a másik irányból húzza; ám ekkor a két húzási hossz nem azonos, így a nyúlás mértéke sem, tehát a mechanika tekeredik!
Üdv.: Áron
Ui.: "Ötletet másolni csak pontosan, szépen, ahogy a csillag megy az égen, úgy érdemes!" :-)
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2006 július 17, 22:02
Írta: s5f8tmfv3 Dátum 2006 július 17, 22:02
Ez valóban ritka megoldás, mik a tapasztalataid vele? Van még valami különlegesség a gépen amit titkolsz? [#wink]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 július 17, 22:20
Írta: 000000000 Dátum 2006 július 17, 22:20
Yes!![#alien][#ticking]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 július 17, 22:27
Írta: 000000000 Dátum 2006 július 17, 22:27
Egy titok ennél a hajtásnál ne halgassatok "Szobrász"-ra mert az önbeáló mozgás miatt a fogas szíj rögtön megugrik!Szerintem ez csak ezzel a pici láncal megoldható!!/egyébként 1 csapágy 3900ft volt hozzá/Ezt 1 ujhegyel lehet forgatni kb az y híd össz 70kg.[#felkialtas][#eplus2][#nyes]Szerintetek ez sok vasból ??
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 július 18, 19:07
Írta: 000000000 Dátum 2006 július 18, 19:07
Megpróbáltam javítani maffia képein, hogy jobban látható legyen és elférjen a képernyőn. Ennyire sikerült:



Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 július 18, 20:55
Írta: 000000000 Dátum 2006 július 18, 20:55
Köszi!!HobbyCNC
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2006 július 18, 22:49
Írta: svejk Dátum 2006 július 18, 22:49
Sziasztok!
A képeken a lánc láthatóan laza.
1-2 fél lépés nem vész el a holtjáték miatt?
Fogazott szíj csak jobb lenne, még ha rosszabb is a hatásfoka. Nem?
A képeken a lánc láthatóan laza.
1-2 fél lépés nem vész el a holtjáték miatt?
Fogazott szíj csak jobb lenne, még ha rosszabb is a hatásfoka. Nem?
Cím: Re:Léptetőmotor
Írta: yhwx2ew89 Dátum 2006 július 27, 14:46
Írta: yhwx2ew89 Dátum 2006 július 27, 14:46
"A 8 kivezetéses (univerzális), 2 fázisú motorokat előbb a 6 kivezetésesnek megfelelően (unipolárisnak) el kell kötni!"Ez milyen hatással van egy bipoláris motor teljesitményére?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 július 27, 17:43
Írta: 000000000 Dátum 2006 július 27, 17:43
Egy unipolárisnak elkötött motor és egy bipolárisnak elkötött (párhuzamos gerjesztésű) között kb. 20~40% nyomaték külömbség van (az uni a kisebb).
Cím: Re:Léptetőmotor
Írta: yhwx2ew89 Dátum 2006 július 27, 18:54
Írta: yhwx2ew89 Dátum 2006 július 27, 18:54
Akkor bipoláris módban nem tudom használni a H1 vezérlőt?!
Köszönöm a segitséget!
Köszönöm a segitséget!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 július 27, 19:01
Írta: 000000000 Dátum 2006 július 27, 19:01
Nem.
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2006 augusztus 01, 14:44
Írta: Motoros Dátum 2006 augusztus 01, 14:44
Sziasztok
Biztos mindenki ismeri, de hátha mégse ezért leírom
Hogyan lehet megállapítani a léptető motor összetartozó tekercspárjait ellenállásmérő nélkűl?
Találomra összezárunk két kivezetést és megtekerjük a tengelyt, ha könnyen megy akkor nem talált-tehát nem összetartozó.
Ha nehezen akadozva akkor összetartozik, és megjegyezzük. Így folytatjuk tovább. Ha unipoláris a motor akkor a középkivezetést zárjuk az egyik széléhez akkor könnyebben forgatható mint ha a két szélsőt zárjuk rövidre, tehát a középkivezetést is beazonosíthatjuk ezzel a módszerrel. Sokkal gyorsabb módszer mint ohmmérővel pepecselni, amiben természetesen az elem is ki van merűlve.
Sajnos a módszer arra nem ad választ hogy hány éves a kapitány[#mf1]
Biztos mindenki ismeri, de hátha mégse ezért leírom
Hogyan lehet megállapítani a léptető motor összetartozó tekercspárjait ellenállásmérő nélkűl?
Találomra összezárunk két kivezetést és megtekerjük a tengelyt, ha könnyen megy akkor nem talált-tehát nem összetartozó.
Ha nehezen akadozva akkor összetartozik, és megjegyezzük. Így folytatjuk tovább. Ha unipoláris a motor akkor a középkivezetést zárjuk az egyik széléhez akkor könnyebben forgatható mint ha a két szélsőt zárjuk rövidre, tehát a középkivezetést is beazonosíthatjuk ezzel a módszerrel. Sokkal gyorsabb módszer mint ohmmérővel pepecselni, amiben természetesen az elem is ki van merűlve.
Sajnos a módszer arra nem ad választ hogy hány éves a kapitány[#mf1]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 augusztus 01, 15:25
Írta: 000000000 Dátum 2006 augusztus 01, 15:25
Az ötlet nem rossz, viszont nem tökéletes!
8 kivezetésesnél, hogyan állapítod meg az egyfázishoz tartozó 2 tekecset (ugye ebből 4 db van egy ilyen motornál)?
A legnagyobb probléma a fázison belüli ellengerjesztés meghatározása (elkerülése)!
8 kivezetésesnél, hogyan állapítod meg az egyfázishoz tartozó 2 tekecset (ugye ebből 4 db van egy ilyen motornál)?
A legnagyobb probléma a fázison belüli ellengerjesztés meghatározása (elkerülése)!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 augusztus 25, 18:52
Írta: 000000000 Dátum 2006 augusztus 25, 18:52
Sziasztok
Van egy 10 kivezetéses VEXTA léptetőmotorom.
Hogyan tudnám beazonosítani a vezetékeket(használható-e)?
Üdv: Jagger
Van egy 10 kivezetéses VEXTA léptetőmotorom.
Hogyan tudnám beazonosítani a vezetékeket(használható-e)?
Üdv: Jagger
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 augusztus 26, 01:32
Írta: 000000000 Dátum 2006 augusztus 26, 01:32
Az nem valószínű, hogy léptetőmotor :(
Cím: Re:Léptetőmotor
Írta: dg8n4i8x Dátum 2006 augusztus 26, 08:13
Írta: dg8n4i8x Dátum 2006 augusztus 26, 08:13
Lehet az 5 fázisú létető is! Sajnos azt sehogy nem tudod bekötni István vezérlőjéhez. :(
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 augusztus 26, 15:27
Írta: 000000000 Dátum 2006 augusztus 26, 15:27
Sziasztok
Az 5 fázisú motort lehet-e a H1-es vezérlővel használni?
Üdv Jagger
Az 5 fázisú motort lehet-e a H1-es vezérlővel használni?
Üdv Jagger
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 augusztus 26, 15:50
Írta: 000000000 Dátum 2006 augusztus 26, 15:50
Nem, csak 2 fázisút!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 augusztus 26, 22:15
Írta: 000000000 Dátum 2006 augusztus 26, 22:15
Sziasztok!
Valahol a fórumon láttam, hogy 5 már vezetékkel is be lehet kötni a PROFI1-be az eredetileg 6 ill. 8 kivezetéses mocikat. Csak 5 eres kábelt kaptam a megfelelő keresztmetszetben ezért kérem, hogy adjátok meg a bekötés módját.
Valahol a fórumon láttam, hogy 5 már vezetékkel is be lehet kötni a PROFI1-be az eredetileg 6 ill. 8 kivezetéses mocikat. Csak 5 eres kábelt kaptam a megfelelő keresztmetszetben ezért kérem, hogy adjátok meg a bekötés módját.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 augusztus 27, 01:51
Írta: 000000000 Dátum 2006 augusztus 27, 01:51
A két M+ -t vezetheted elvileg 1 kábelen, ha jól tudom.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 augusztus 27, 08:53
Írta: 000000000 Dátum 2006 augusztus 27, 08:53
Pontosan! A motor középkivezetéseit egyesítheted egy érben (úgy is mindkettő az M+ -ra megy)!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 augusztus 28, 09:07
Írta: 000000000 Dátum 2006 augusztus 28, 09:07
Sziasztok!
Én is így gondoltam, de jobb ha megkérdezem.
Más.. Ha ez már így van akkor nem lehetne-e egy egyszerű vezérlőt csinálni SAA1027-es IC-kel?
Van egy ilyen kapcsolásom, amely azonban direktben csak fél ampert tud fázisonként. Azonban az open collector kimenet miatt az IC után tranyók köthetők, így a megengedhető fázisáramot fel lehetne tupírozni. Mit szóltok hozzá?
Én is így gondoltam, de jobb ha megkérdezem.
Más.. Ha ez már így van akkor nem lehetne-e egy egyszerű vezérlőt csinálni SAA1027-es IC-kel?
Van egy ilyen kapcsolásom, amely azonban direktben csak fél ampert tud fázisonként. Azonban az open collector kimenet miatt az IC után tranyók köthetők, így a megengedhető fázisáramot fel lehetne tupírozni. Mit szóltok hozzá?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 augusztus 31, 13:25
Írta: 000000000 Dátum 2006 augusztus 31, 13:25
Hali!
Megtudná mondani valaki azt, hogy a léptetőmotorgyártók miért titkolóznak amikor a motorjaik adatait közlik.
Nem értem, hogy ha egy motor névleges feszültségének 1.9 V adnak meg akkor azt miért egészséges 30 voltról hajkurászni. Ha viszont ez kell neki, akkor miért nem ezt adják meg az adattáblán. Nekem ez magaslabda.
Üdv rátok
Megtudná mondani valaki azt, hogy a léptetőmotorgyártók miért titkolóznak amikor a motorjaik adatait közlik.
Nem értem, hogy ha egy motor névleges feszültségének 1.9 V adnak meg akkor azt miért egészséges 30 voltról hajkurászni. Ha viszont ez kell neki, akkor miért nem ezt adják meg az adattáblán. Nekem ez magaslabda.
Üdv rátok
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 augusztus 31, 14:07
Írta: 000000000 Dátum 2006 augusztus 31, 14:07
Sziasztok!
Ebben semmi titok nincs.
Amit közölnek adatokat a gyártók , (pl. 1.9 V)
az azt jelenti, hogy egyenáram esetén,
állandó gerjesztéskor a motor maximum
ekkora teljesítményt (disszipációt)
tud elviselni. Ha azonban léptető
impulzusokat kap, az ugye váltóáram, tehát
a motor induktivitása kapcsán nagyobb frekvenciáknál ugyanakkora áramhoz nagyobb feszültség tartozik.
tr általában
Ebben semmi titok nincs.
Amit közölnek adatokat a gyártók , (pl. 1.9 V)
az azt jelenti, hogy egyenáram esetén,
állandó gerjesztéskor a motor maximum
ekkora teljesítményt (disszipációt)
tud elviselni. Ha azonban léptető
impulzusokat kap, az ugye váltóáram, tehát
a motor induktivitása kapcsán nagyobb frekvenciáknál ugyanakkora áramhoz nagyobb feszültség tartozik.
tr általában
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 augusztus 31, 14:55
Írta: 000000000 Dátum 2006 augusztus 31, 14:55
Ezt eddig is értettem. De a léptetőket 15-40 KHz frekivel kergetjük többnyire, akkor miért nem az ehhez ajánlott feszültségértékeket adják meg. Nekem ez nem fér a fejembe.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 augusztus 31, 15:45
Írta: 000000000 Dátum 2006 augusztus 31, 15:45
Adataid kicsit túlzóak, ezeket ugyanis
csak még szuper konstrukciójú step motorok
(pl. Portescap) sem igen tudják. De számoljunk egy kicsit.
1.8 fokos motort még féllépésben is
10 1/s-os (600 ford/min) sebességgel
hajtva a frekvencia csak 4 KHz. Ez a frekvencia
nagyon messze van a 15-40 KHz-től.
Ettől nagyobb fordulatszámokra pedig lépéstévesztés miatt nem érdemes
felmenni, szeritem 5 (rosszabb esetben 2-3)
1/s fölött örülj minden fordulatnak, az
ajándék, ha még a névleges motornyomatékod
legalább 50 %-a megvan. Az általad
megadott frekvencia step-dir rendszerű szervó
hajtásoknál van, illetve ott sokkal magasabb is lehet. Más a helyzet, ha microstep
hajtásod van, mert ott valóban lehetnek
nagyobb frekvenciák, de még azok sem nagyon
érik el a a 40 KHz-et.
Az egyenáramú alapadatoknak pedig az
az oka, hogy ebből lehet méretezni
minden más verziót, hiszen a gyártó
nem tudhatja a Te alkalmazott hajtástechnikád
megoldásait (áttételezés, bipolár-
unipolár mód, lépésfelosztások száma,ú
terhelő nyomaték nagysága, maximális
senesség, stb....). A nagyobb frekvenciák
méretezéshez pedig váltakozó áramú villamos áramkörök impedancia számításait javaslom.
Talán sikerült válaszolnom a kérdésedere.
Üdv. Mindenkinek!
Tibor
csak még szuper konstrukciójú step motorok
(pl. Portescap) sem igen tudják. De számoljunk egy kicsit.
1.8 fokos motort még féllépésben is
10 1/s-os (600 ford/min) sebességgel
hajtva a frekvencia csak 4 KHz. Ez a frekvencia
nagyon messze van a 15-40 KHz-től.
Ettől nagyobb fordulatszámokra pedig lépéstévesztés miatt nem érdemes
felmenni, szeritem 5 (rosszabb esetben 2-3)
1/s fölött örülj minden fordulatnak, az
ajándék, ha még a névleges motornyomatékod
legalább 50 %-a megvan. Az általad
megadott frekvencia step-dir rendszerű szervó
hajtásoknál van, illetve ott sokkal magasabb is lehet. Más a helyzet, ha microstep
hajtásod van, mert ott valóban lehetnek
nagyobb frekvenciák, de még azok sem nagyon
érik el a a 40 KHz-et.
Az egyenáramú alapadatoknak pedig az
az oka, hogy ebből lehet méretezni
minden más verziót, hiszen a gyártó
nem tudhatja a Te alkalmazott hajtástechnikád
megoldásait (áttételezés, bipolár-
unipolár mód, lépésfelosztások száma,ú
terhelő nyomaték nagysága, maximális
senesség, stb....). A nagyobb frekvenciák
méretezéshez pedig váltakozó áramú villamos áramkörök impedancia számításait javaslom.
Talán sikerült válaszolnom a kérdésedere.
Üdv. Mindenkinek!
Tibor
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 augusztus 31, 18:35
Írta: 000000000 Dátum 2006 augusztus 31, 18:35
Köszönöm, ez kimerítő válasz. Annyit azért hozzátennék, hogy a frekit csak találomra adtam meg. A pontos frekvencia értelemszerűen a vezérlő függvénye. Én csak azt szerettem volna jelezni, hogy nem mindenki villamosmérnök aki léptecseket használ, és állandóan esz a fene, hogy akár a 5.6 akár 1.6 V-os motorokat 30 voltal hajtom. Szerettem volna egy általános kapaszkodót, hogy tudjam is, hogy mit teszek, ne csak merjem.
De lehet, hogy el kell fogadjam azt, hogy nem kell nekem mindent tudni.
De ha kéznél van egy aránylag egyszerű, számítási metódus amit le tudsz írni itt, azt megköszönném. Amivel például a adattáblákon fellelhető, vagy egyszerű műszerekkel (pl. uni müszer, induktivitás mérő stb.) mérhető mennyiségekkel tudok számolni. Megnéztem a vezérlőm adatlapját, és 100 KHz-es értéket ad meg. Feltehetően ez a max amin még müxik. Én nem használom ki a max mikrolépés tartományt mert még a kisérletezgetésnél tartok. 800 mikrolépés / fordulatnál tartok,(a Te mintpéldádból következtetve kb. 5-5.2 Khz) és valószinűleg visszamegyek 400-ra. Én csak naggyából tudni szeretném, hogy mit csinálok, de a kandóra már nem akarok beíratkozni. Tehátmost kéne az a képlet ami alapján az induktivitás és a müködési frekvencia alapján ki tudnám okúmlálni a megfelelő müködtető feszültséget. Mert jelenleg hittel müködtetem: "Kösd rá nyugodtan a 30V-ot, másnak se égett le még." És én ezt teszem. De így egy kicsit lazának tűnik a történet.
Hát kicsit hosszi lett, de köszönöm a problémámmal való törődést.
Üdv a csapatnak
De lehet, hogy el kell fogadjam azt, hogy nem kell nekem mindent tudni.
De ha kéznél van egy aránylag egyszerű, számítási metódus amit le tudsz írni itt, azt megköszönném. Amivel például a adattáblákon fellelhető, vagy egyszerű műszerekkel (pl. uni müszer, induktivitás mérő stb.) mérhető mennyiségekkel tudok számolni. Megnéztem a vezérlőm adatlapját, és 100 KHz-es értéket ad meg. Feltehetően ez a max amin még müxik. Én nem használom ki a max mikrolépés tartományt mert még a kisérletezgetésnél tartok. 800 mikrolépés / fordulatnál tartok,(a Te mintpéldádból következtetve kb. 5-5.2 Khz) és valószinűleg visszamegyek 400-ra. Én csak naggyából tudni szeretném, hogy mit csinálok, de a kandóra már nem akarok beíratkozni. Tehátmost kéne az a képlet ami alapján az induktivitás és a müködési frekvencia alapján ki tudnám okúmlálni a megfelelő müködtető feszültséget. Mert jelenleg hittel müködtetem: "Kösd rá nyugodtan a 30V-ot, másnak se égett le még." És én ezt teszem. De így egy kicsit lazának tűnik a történet.
Hát kicsit hosszi lett, de köszönöm a problémámmal való törődést.
Üdv a csapatnak
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 augusztus 31, 20:52
Írta: 000000000 Dátum 2006 augusztus 31, 20:52
Nos próbálok Neked és talán másoknak is
motor hajtás teszt ötletet adni.
Bonyolult képletek helyett egyszerű gyakorlati
módszert javaslok.
Először is tudnod kell a vezérlőd rendelkezik-e
áramgenerátoros kimenettel (minden körülmény közepette
állandó a kimenő áram).
Ha igen, akkor ezt állítsd be az adott vezérlődön a
motorod adatára (I=U/R alap adatok alapján).
A tápegységed feszültsége ilyenkor
akár az alapadat 4-8 szorosa is lehet (persze a vezérlő
max. adatánál nem lehet nagyobb).
Egy árammérőt is azért érdemes a tápegységgel sorba kötni,
Terheld meg a motorod tengelyét a névleges nyomaték
(motor gyári adata pl. 0.3 Nm) 40-50%-ával.
Az állandó ellennyomatékot legegyszerűbben
egy adott tárcsára erős damilra akasztott súllyal
állíthatod elő.
Ezek után 0-ról növelve a lépetési frekvenciát egyszer
csak a motorod már nem adja le az adott nyomatékot,
a terhelő nyomaték nagyobb lesz, ez a frekvencia (FLmax)
fogja jelenteni az adott konfigurációd (motor+táp+ vezérlő+
hajtásmód+vezérlőprogram ) maximális, nagy megbízhatóságú
sebességét.
A tápfeszültséget addig csökkentheted, ameddig nem
FLmax esetén nem tapasztalsz nyomatékvesztést.
Ez lesz az optimális tápegység feszültség.
Ha nem áramgenerátoros a hajtásod, akkor tápláld meg
egy külső áramlimittel (ezt állítsd be a motoradatra)
rendelkező tápegységről a rendszeredet.
Induló feszültség a motoradat 1.5 - 2-szerese legyen.
Minden 100-200Hz freki növeléskor növeld a tápot a motorod
alapadatával.
Amikor az előbbiek alapján a nyomatékpontod megvan,
az ehhez tartozó feszültség lehet a tápod maximuma.
A mérés második menete kapcsán egy így beállított
tápegységről pásztázd végig a frekit növelve az áramfelvételt,
és az lehetőleg ne legyen nagyobb állandósult állapotban,
a névleges alapadat 1.2-szeresénél. Közben ha erős
eltéréseket tapasztalsz a tápegység áramban (i>2*alapadat),
akkor sajnos csak az a feszültség lehet a maximumod,
amíg ez a jelenség be nem következik.
Remélem sikerült érthetően elmondani a dolgot.
Sok sikert az optimális beállításhoz.
Üdv. Mindenkinek!
Tibor
motor hajtás teszt ötletet adni.
Bonyolult képletek helyett egyszerű gyakorlati
módszert javaslok.
Először is tudnod kell a vezérlőd rendelkezik-e
áramgenerátoros kimenettel (minden körülmény közepette
állandó a kimenő áram).
Ha igen, akkor ezt állítsd be az adott vezérlődön a
motorod adatára (I=U/R alap adatok alapján).
A tápegységed feszültsége ilyenkor
akár az alapadat 4-8 szorosa is lehet (persze a vezérlő
max. adatánál nem lehet nagyobb).
Egy árammérőt is azért érdemes a tápegységgel sorba kötni,
Terheld meg a motorod tengelyét a névleges nyomaték
(motor gyári adata pl. 0.3 Nm) 40-50%-ával.
Az állandó ellennyomatékot legegyszerűbben
egy adott tárcsára erős damilra akasztott súllyal
állíthatod elő.
Ezek után 0-ról növelve a lépetési frekvenciát egyszer
csak a motorod már nem adja le az adott nyomatékot,
a terhelő nyomaték nagyobb lesz, ez a frekvencia (FLmax)
fogja jelenteni az adott konfigurációd (motor+táp+ vezérlő+
hajtásmód+vezérlőprogram ) maximális, nagy megbízhatóságú
sebességét.
A tápfeszültséget addig csökkentheted, ameddig nem
FLmax esetén nem tapasztalsz nyomatékvesztést.
Ez lesz az optimális tápegység feszültség.
Ha nem áramgenerátoros a hajtásod, akkor tápláld meg
egy külső áramlimittel (ezt állítsd be a motoradatra)
rendelkező tápegységről a rendszeredet.
Induló feszültség a motoradat 1.5 - 2-szerese legyen.
Minden 100-200Hz freki növeléskor növeld a tápot a motorod
alapadatával.
Amikor az előbbiek alapján a nyomatékpontod megvan,
az ehhez tartozó feszültség lehet a tápod maximuma.
A mérés második menete kapcsán egy így beállított
tápegységről pásztázd végig a frekit növelve az áramfelvételt,
és az lehetőleg ne legyen nagyobb állandósult állapotban,
a névleges alapadat 1.2-szeresénél. Közben ha erős
eltéréseket tapasztalsz a tápegység áramban (i>2*alapadat),
akkor sajnos csak az a feszültség lehet a maximumod,
amíg ez a jelenség be nem következik.
Remélem sikerült érthetően elmondani a dolgot.
Sok sikert az optimális beállításhoz.
Üdv. Mindenkinek!
Tibor
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 01, 08:17
Írta: 000000000 Dátum 2006 szeptember 01, 08:17
Köszönöm!
Megpróbálom.
Üdv mindenkinek
Megpróbálom.
Üdv mindenkinek
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 04, 16:23
Írta: 000000000 Dátum 2006 szeptember 04, 16:23
Üdv mindenkinek!
Kedves Urak! Kezdő gépépítőként abban kérném segítségeteket, hogy van egy Sanyo Denki 103-550-0149 tipusú 6 vezetékes motorom, ami 1,875 fokot lép és 10,7 ohmos, de nem találok róla égen földön leírást sehol! Még a japán oldalt is megnéztem, de semmi! Help!
Köszönöm előre is!
Kedves Urak! Kezdő gépépítőként abban kérném segítségeteket, hogy van egy Sanyo Denki 103-550-0149 tipusú 6 vezetékes motorom, ami 1,875 fokot lép és 10,7 ohmos, de nem találok róla égen földön leírást sehol! Még a japán oldalt is megnéztem, de semmi! Help!
Köszönöm előre is!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 04, 16:40
Írta: 000000000 Dátum 2006 szeptember 04, 16:40
Szia!
Ez a 1.875° rá van írva? Elég fúrcsa lépésszög, hacsak nem 5 fázisú (192 lépés / fordulat)!
Nem szerepel az én adatbázisomban sem.
Ez a 1.875° rá van írva? Elég fúrcsa lépésszög, hacsak nem 5 fázisú (192 lépés / fordulat)!
Nem szerepel az én adatbázisomban sem.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 04, 23:34
Írta: 000000000 Dátum 2006 szeptember 04, 23:34
Sziasztok.
Szerztem pár léptetőmotort és nemtudom hány Nm-es.Az adatlapján ez áll 2,5kg/cm ez hány Nm?Hogy kell kiszámitani?Sajna ilyen téren béna vagyok:)
Szerztem pár léptetőmotort és nemtudom hány Nm-es.Az adatlapján ez áll 2,5kg/cm ez hány Nm?Hogy kell kiszámitani?Sajna ilyen téren béna vagyok:)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 04, 23:44
Írta: 000000000 Dátum 2006 szeptember 04, 23:44
Szia Tramp!
1kg --> 10 N , mivel g=10...
A 2.5kg/cm= 25N/cm= 0.25N/m!!
1kg --> 10 N , mivel g=10...
A 2.5kg/cm= 25N/cm= 0.25N/m!!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 04, 23:50
Írta: 000000000 Dátum 2006 szeptember 04, 23:50
Köszönöm!!!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 05, 12:01
Írta: 000000000 Dátum 2006 szeptember 05, 12:01
Szia!
Igen 1,875 fok! Most voltam a Q-tech-nél, nekik van kb. 6 tonna katatlógusuk, de nem talált ilyet az ember. Kérésemre megpróbál a gyártótól adattáblát lekérdezni és értesít! (azt vélelmezte, lehet hogy egyedi gyártású és megrendelésre szállította a Sanyo Denki, egyébként egy Star nyomtatóban volt!)
Köszi az érdeklődést!
Igen 1,875 fok! Most voltam a Q-tech-nél, nekik van kb. 6 tonna katatlógusuk, de nem talált ilyet az ember. Kérésemre megpróbál a gyártótól adattáblát lekérdezni és értesít! (azt vélelmezte, lehet hogy egyedi gyártású és megrendelésre szállította a Sanyo Denki, egyébként egy Star nyomtatóban volt!)
Köszi az érdeklődést!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 05, 12:56
Írta: 000000000 Dátum 2006 szeptember 05, 12:56
Egy Ohm mérővel eldöntheted, hogy 2 fázisú, vagy 5! 5 fázisú esetén még érthető is lenne a lépésszöge.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 05, 14:26
Írta: 000000000 Dátum 2006 szeptember 05, 14:26
Helló "tramp" és "tyutyi" !
Csak a pontosság kedvéért: A nyomaték nem kg/cm vagy N/cm, hanem kgcm vagy Ncm. Az előző két mértékegység az nyomásé (lenne ha kg/cm2 v. N/cm2) és nem a nyomatéké. Nem mindegy, hogy osztogatnak, vagy fosztogatnak! Egyébként ITT vagy ITT szinte bármit bármivé átszámolhatsz.
Csak a pontosság kedvéért: A nyomaték nem kg/cm vagy N/cm, hanem kgcm vagy Ncm. Az előző két mértékegység az nyomásé (lenne ha kg/cm2 v. N/cm2) és nem a nyomatéké. Nem mindegy, hogy osztogatnak, vagy fosztogatnak! Egyébként ITT vagy ITT szinte bármit bármivé átszámolhatsz.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 05, 14:56
Írta: 000000000 Dátum 2006 szeptember 05, 14:56
Így van! Valamint a File tárházban van egy konverter progi (mindne mértékegységet mindenre oda-vissza vált/számol)!
Converter.exe
Converter.exe
Cím: Re:Léptetőmotor
Írta: j3rx6bsjd Dátum 2006 szeptember 05, 20:26
Írta: j3rx6bsjd Dátum 2006 szeptember 05, 20:26
Sziasztok!
Sikerült szert tennem egy "léptetőmotorra"
5 vezetékes unipolárisnak nézem,de az a gondom,hogy a forgórész csak egy fém serleg,nem mágnes.Hogyan működik vajon?Használható ez is vagy teljesen más meghajtást igényel?Teljesítményben rosszabb vagy esetleg jobb?
Remélem találkozott már valaki ilyennel.
Előre is köszi a segítséget.
Sikerült szert tennem egy "léptetőmotorra"
5 vezetékes unipolárisnak nézem,de az a gondom,hogy a forgórész csak egy fém serleg,nem mágnes.Hogyan működik vajon?Használható ez is vagy teljesen más meghajtást igényel?Teljesítményben rosszabb vagy esetleg jobb?
Remélem találkozott már valaki ilyennel.
Előre is köszi a segítséget.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 06, 07:17
Írta: 000000000 Dátum 2006 szeptember 06, 07:17
Nekem is van ilyen motorom! Ezt serleg motornak hívják és nem léptetőmotor (semmi köze nincs hozzá)! Teljesen más elven működik és més meghajtást is kíván mint egy léptecs. Az elve a klasszikus asszinkron motoré (örvényáramú), de sokfázisú (valszeg 4, csillagban elkötve).
Viszont létezik ilyen mágnesesben is (ha a tengelyén nem érzel olyan fix poziciókat mint egy léptecsnél, akkor asszinkron motor). Ha van benne mágnes (van fix pizíciói), akkor léptetőmotor, de akkor is minimum 4 fázisú (olyan vezérlő is kell hozzá).
Viszont létezik ilyen mágnesesben is (ha a tengelyén nem érzel olyan fix poziciókat mint egy léptecsnél, akkor asszinkron motor). Ha van benne mágnes (van fix pizíciói), akkor léptetőmotor, de akkor is minimum 4 fázisú (olyan vezérlő is kell hozzá).
Cím: Re:Léptetőmotor
Írta: j3rx6bsjd Dátum 2006 szeptember 06, 07:45
Írta: j3rx6bsjd Dátum 2006 szeptember 06, 07:45
Oké.De akkor minek van ráírva a lépésszám?
Ha DC feszt.kapcsolok rá,akkor tart mint egy léptetőmotor,viszont forgatás közben nincs semmi ellenállása.
Ha DC feszt.kapcsolok rá,akkor tart mint egy léptetőmotor,viszont forgatás közben nincs semmi ellenállása.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 06, 08:04
Írta: 000000000 Dátum 2006 szeptember 06, 08:04
Van saját elektronikája (ráépítve valahol)?
Cím: Re:Léptetőmotor
Írta: j3rx6bsjd Dátum 2006 szeptember 06, 09:35
Írta: j3rx6bsjd Dátum 2006 szeptember 06, 09:35
Nincs
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 06, 09:46
Írta: 000000000 Dátum 2006 szeptember 06, 09:46
Akkor nem értem (nem ismerem). Hogyan tartja pozícióban állandó mágnes vagy egyébb elektronika hijján?![#nemtudom]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 06, 09:48
Írta: 000000000 Dátum 2006 szeptember 06, 09:48
A serleg alu, vagy vas?
Cím: Re:Léptetőmotor
Írta: j3rx6bsjd Dátum 2006 szeptember 06, 12:39
Írta: j3rx6bsjd Dátum 2006 szeptember 06, 12:39
Vas és teljesen úgy néz ki,mint a léptetőmotor forgórésze,de nem mágnesből van hanem vaslemezből.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 06, 13:15
Írta: 000000000 Dátum 2006 szeptember 06, 13:15
Akkor ezt nem ismerem!
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2006 szeptember 06, 16:50
Írta: D.Laci Dátum 2006 szeptember 06, 16:50
Van olyan léptető motor amiben nincs mágnes! Sőt régen gyártotak olyat hogy elektromágnes volt a forgórész...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 06, 17:37
Írta: 000000000 Dátum 2006 szeptember 06, 17:37
Szia!
Amiben nincs állandómágne és nem elektromágna, az hogyan műxik (mi az ellenpólus)?
Amiben nincs állandómágne és nem elektromágna, az hogyan műxik (mi az ellenpólus)?
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2006 szeptember 06, 18:10
Írta: D.Laci Dátum 2006 szeptember 06, 18:10
Simán csak a fogaskerék szerü forgórész van bene, 1 darabbol van nem 2-böl mint a mágnesesben. igy igaz gyengébb a moci de müködik. a gamma gyár gyártot ilyet.a mágnes kapcsolóban sincs mágnes mégis behuzza...
ha van kéznél egy széd szedet moci, a mágnest kiszeded a kétt felét pontossan össze forgatod ,majd összerakod müködni fog..
ha van kéznél egy széd szedet moci, a mágnest kiszeded a kétt felét pontossan össze forgatod ,majd összerakod müködni fog..
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 06, 19:03
Írta: 000000000 Dátum 2006 szeptember 06, 19:03
Világos, de ez miért jó? Gyengébb (sokkal) mint amibe mágnes van...
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2006 szeptember 06, 19:48
Írta: D.Laci Dátum 2006 szeptember 06, 19:48
Nem jó csak olcsóbb volt hajdan. A célnak megfelelt. Ugytudom már nem gyártanak ilyet seholsem.
Cím: Re:Léptetőmotor
Írta: j3rx6bsjd Dátum 2006 szeptember 06, 20:17
Írta: j3rx6bsjd Dátum 2006 szeptember 06, 20:17
Köszi az infót,akkor a lényeg az,hogy elvileg használható,de gyakorlatilag nem az igazi,mert lényegesen gyengébb a hagyományos léptetőmotoroktól.
Cím: Re:Léptetőmotor
Írta: sasi Dátum 2006 szeptember 06, 21:26
Írta: sasi Dátum 2006 szeptember 06, 21:26
Sziasztok!
A nem mágneses forgórészű léptető kinézetű motorokat, KR (kapcsolt reluktancia, Switched Reluctance Motor ) hívják. Azonos motortömeg mellett nagyobb a fogyasztás, és a nyomaték, valamint lényegesen nagyobb a dinamikája, továbbá a maximális fordulatszáma mint a mágneses forgórészű motoroknak, de komplikáltabb a vezérlése. A DC szervók kiszorították az automatizálásból. A # 390 fotója egy ilyen motort mutat.
A nem mágneses forgórészű léptető kinézetű motorokat, KR (kapcsolt reluktancia, Switched Reluctance Motor ) hívják. Azonos motortömeg mellett nagyobb a fogyasztás, és a nyomaték, valamint lényegesen nagyobb a dinamikája, továbbá a maximális fordulatszáma mint a mágneses forgórészű motoroknak, de komplikáltabb a vezérlése. A DC szervók kiszorították az automatizálásból. A # 390 fotója egy ilyen motort mutat.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 07, 07:13
Írta: 000000000 Dátum 2006 szeptember 07, 07:13
Köszi az infót! Nekem is van egy ilyen, ha kell valakinek, neki adom (csak jöjjön érte)!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 07, 10:37
Írta: 000000000 Dátum 2006 szeptember 07, 10:37
Köszi az ötletet, de azóta fellépett egy másik motor alternatíva, aminek a vezérlőfeszültség meghatározásában kérném a segítségedet, ha lehet! A motor: 1,25A; 1,1V; 0,9Ω; 1,5mH. H1 vezérlővel tervezek és a leírásban a teljesítménytényező táblázat szerint, ehhez az alapfesz.-hez tartozó szorzó 9-25! A kérdés az, hogy ha van egy olyan trafóm ami 15,5V-ot ad váltóba és 160VA-es akkor ez megfelelő lehet-e? A táblázat szerint úgy számoltam, hogy ez pont jó, kérlek erősíts meg vagy cáfolj!
Előre is köszönöm!
Üdv
Előre is köszönöm!
Üdv
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 07, 12:55
Írta: 000000000 Dátum 2006 szeptember 07, 12:55
Nekem 26.5V jön ki! Lehet használni 15.5V-ról is, de így nem használod ki teljesen a tuningot (én inkább 24V-os trafót néznék)!
A teljesítménye megfelelő lenne (trafóé).
A teljesítménye megfelelő lenne (trafóé).
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 08, 08:57
Írta: 000000000 Dátum 2006 szeptember 08, 08:57
Sziasztok!
Segítséget szeretnék kérni léptető motor választás ügyében.
A holland motorok közül kinéztünk magunknak egy 6,4Nm-es típust, és mint kiderült több lehetőség is van.
Az egyik 2,5A-es, a másik 3,2A-es, azonos geometriai méret mellett, a 3,2A-es 2,6V feszültségű, a 2,5A-es feszültségéről nincs adat (ennek vajon nagyobb, vagy kisebb a feszültsége)?
Továbbá létezik egy típus ami nagyobb geometriai méretekkel rendelkezik, 3,2A, és 1V adatokkal.
Jelenleg egy emelt feszültségű Profi1 vezérlővel rendelkezünk. Hűtés még nincs rajta, de tervezzük, hogy rárakunk a nagyobb áramok miatt. Ti a fenti adatok alapján melyik motort választanátok, és miért (hogy tanuljak belőle)?
Segítséget szeretnék kérni léptető motor választás ügyében.
A holland motorok közül kinéztünk magunknak egy 6,4Nm-es típust, és mint kiderült több lehetőség is van.
Az egyik 2,5A-es, a másik 3,2A-es, azonos geometriai méret mellett, a 3,2A-es 2,6V feszültségű, a 2,5A-es feszültségéről nincs adat (ennek vajon nagyobb, vagy kisebb a feszültsége)?
Továbbá létezik egy típus ami nagyobb geometriai méretekkel rendelkezik, 3,2A, és 1V adatokkal.
Jelenleg egy emelt feszültségű Profi1 vezérlővel rendelkezünk. Hűtés még nincs rajta, de tervezzük, hogy rárakunk a nagyobb áramok miatt. Ti a fenti adatok alapján melyik motort választanátok, és miért (hogy tanuljak belőle)?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 08, 10:40
Írta: 000000000 Dátum 2006 szeptember 08, 10:40
Szia!
Én a Prifi1 esetén a nagyobb feszültségű/kisebb áramút választanám. Két okból:
1. a tuningtényezője miatt könyebb tápot választani egy 3-5V-os motorhoz (pl. 12V).
2. a melegedései kisebb lesz a kisebb áramok miatt.
H1-nél már nem így választanék.
Én a Prifi1 esetén a nagyobb feszültségű/kisebb áramút választanám. Két okból:
1. a tuningtényezője miatt könyebb tápot választani egy 3-5V-os motorhoz (pl. 12V).
2. a melegedései kisebb lesz a kisebb áramok miatt.
H1-nél már nem így választanék.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 08, 13:07
Írta: 000000000 Dátum 2006 szeptember 08, 13:07
Köszi, de 25-ös szorzóval nem 27,5V (alapfesz 1,1V)? Akkor keresek egy 24-es tápot!
Köszönöm!
Köszönöm!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 08, 13:42
Írta: 000000000 Dátum 2006 szeptember 08, 13:42
A 25-ös szorzó 1V-os motorra igaz, az 1.1V-os kicsit kisebb (de egyébként tök mindeg, hogy 26.5 vagy 27.5V)! Nem érzékeny ennyire a vezérlő (még el menne 40V-ról is csak a motor már kimutathatóan jobban melegedne.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 10, 18:35
Írta: 000000000 Dátum 2006 szeptember 10, 18:35
Sziasztok! Elkövettem egy zöldfüles bakit: Szereztem 2db SPA 52/60-5687 és 2db SPA 52/60-5689 motort. Összevariáltam az alkatrészeiket, összeraktam, de mikor kész voltam vettem csak észre, hogy a légrés lemaradt.
Ezekből már nem lesz motor?
Ezekből már nem lesz motor?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 10, 19:00
Írta: 000000000 Dátum 2006 szeptember 10, 19:00
Ne add fel olyan könnyen![#circling]
Ha az összehuzató csavarokat kicsit fellazítod és egy (gumi) kalapács segítségével a motor pajzsát oldal irányba megütögeted, megkereshető olyan pont amikor a forgórész el tud fordúlni! Az NDK motorok (ellnetétben a Japánokéval) nem pozícionáltak és így ferdén is összerakhatóak!
Ha az összehuzató csavarokat kicsit fellazítod és egy (gumi) kalapács segítségével a motor pajzsát oldal irányba megütögeted, megkereshető olyan pont amikor a forgórész el tud fordúlni! Az NDK motorok (ellnetétben a Japánokéval) nem pozícionáltak és így ferdén is összerakhatóak!
Cím: Re:Léptetőmotor
Írta: 5bzs27u7 Dátum 2006 szeptember 11, 20:40
Írta: 5bzs27u7 Dátum 2006 szeptember 11, 20:40
Ebben már profi vagyok, úgy tudod elsőre ütögetés nélkül összerakni, hogy a forgórészre tekersz egysorosan egy papírcsíkot távtartóként.
Így összerakod, meghúzod a csavarokat, mivel a forgórész külön is kivehető, utólag kihúzod, kicsit nehezen fog kijönni.Utánna vissarakod a forgót rögzít és kész is.
Így összerakod, meghúzod a csavarokat, mivel a forgórész külön is kivehető, utólag kihúzod, kicsit nehezen fog kijönni.Utánna vissarakod a forgót rögzít és kész is.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 12, 09:28
Írta: 000000000 Dátum 2006 szeptember 12, 09:28
Viktor barátunk által ajánlott módszer több mint "GROMEK"! Én is ezzel a módszerrel centizem be a kommutátornélküli elektromos modellmotorjaimat. Papírként az asszony sütőpapírját használom. Az megfelelő vastagságú, zsíros tapintású, ezért azt könnyebb "kirabolni". A sütőpapír nálam egyébként a trafókészítésnél is nagyon bevált.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 17, 17:22
Írta: 000000000 Dátum 2006 szeptember 17, 17:22
Köszönöm az infot, tényleg bevált a papiros modszer. Arra kellett csak ügyelni behelyezéskor el ne szakadjon.
Cím: Re:Léptetőmotor
Írta: 5bzs27u7 Dátum 2006 szeptember 17, 19:26
Írta: 5bzs27u7 Dátum 2006 szeptember 17, 19:26
[#vigyor3]Király, örülök, hogy segíthettem.
Cím: Re:Léptetőmotor
Írta: cv4yrkgc Dátum 2006 szeptember 19, 21:31
Írta: cv4yrkgc Dátum 2006 szeptember 19, 21:31
Mitől lehet az hogy a 3 vadi új motorjaim közül az egyik kikapcsolva sokkal nehezebben mozog mint a többi??? Érezhetően ugrik az egyik állásból a másikba és nem szépen átfordul mint a többi...
A motorokat most vettem és ez nem tudom miért lehet de nem nagyon tetszik. Remélem valaki tud nekme segíteni. köszönöm
A motorokat most vettem és ez nem tudom miért lehet de nem nagyon tetszik. Remélem valaki tud nekme segíteni. köszönöm
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 20, 06:45
Írta: 000000000 Dátum 2006 szeptember 20, 06:45
Menetzárlatos (esetleg a kivezetésénél zárlatos) motornál találkoztam ilyennel! Mérjél pontos tekercsellenállásokat és hasonlítsd össze (durva menetzárlat sokszor kimutatható így)! A kivezetései nem érnek össze véletlenül?[#vigyor4]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 20, 11:56
Írta: 000000000 Dátum 2006 szeptember 20, 11:56
Az is lehet, hogy túl durván pakolták, már tatálkoztam ilyennel :((
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2006 szeptember 20, 22:06
Írta: 4mjnxdwuu Dátum 2006 szeptember 20, 22:06
Hali. Próbáld ki, hogy a két könnyen forgóra névleges árammal egyen feszt kapcsolsz, hagyd rajta pár percig. 75% hogy utánna azok is nehezebben forognak majd. Néha találkozzom ilyennel / használt mociknál / Amik biztos, hogy nem egyszerre,hagyták abba az üzemet.
Cím: Re:Léptetőmotor
Írta: lari Dátum 2006 szeptember 26, 19:21
Írta: lari Dátum 2006 szeptember 26, 19:21
Üdv az Uraknak!
MA találkoztam egy érdekes dologgal, és gondoltam megosztom Veletek, hátha valakinek hasznos lehet.
Az történt, hogy kezembe akadt egy renault megan fűtés ventilátor motor. Ahogy kibontottam a burkolatból kiderült, hogy egy léptetőmotor, amelynek 8 tekercse van. vajon miért használnak ventilátormotornak léptetőmotort??? A hátulján van egy panel, amibe be van forrasztva 4 db FET.
A motor külső átmérője kb 100 mm, a tengely átmérő pedig kb 8mm. (ezen adatok alapján akár egy erősebb cnc építéséhez is ideális lehet) a forgórész átmérőjét sajnos megsaccolni sem tudom mert azt nem látom.
Tettem volna fel képet is de nem tudom hogy hogyan kell beilleszteni.... :-)
A file tárba ugyan próbáltam renault ventil néven, de csak a név jelenik meg, rákattintva hibajelzés....
Üdv: lari
MA találkoztam egy érdekes dologgal, és gondoltam megosztom Veletek, hátha valakinek hasznos lehet.
Az történt, hogy kezembe akadt egy renault megan fűtés ventilátor motor. Ahogy kibontottam a burkolatból kiderült, hogy egy léptetőmotor, amelynek 8 tekercse van. vajon miért használnak ventilátormotornak léptetőmotort??? A hátulján van egy panel, amibe be van forrasztva 4 db FET.
A motor külső átmérője kb 100 mm, a tengely átmérő pedig kb 8mm. (ezen adatok alapján akár egy erősebb cnc építéséhez is ideális lehet) a forgórész átmérőjét sajnos megsaccolni sem tudom mert azt nem látom.
Tettem volna fel képet is de nem tudom hogy hogyan kell beilleszteni.... :-)
A file tárba ugyan próbáltam renault ventil néven, de csak a név jelenik meg, rákattintva hibajelzés....
Üdv: lari
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 26, 21:04
Írta: 000000000 Dátum 2006 szeptember 26, 21:04
Heló Lari!
Én is láttam már ijet sőtt az opel motoroknál is van léptetőmotor használva a vezérlésnél 3.5Nm és 12 v.
de az indezit mosógépben is léptető motor pörgeti a dobot 300-1800 ig/az enyémben/ áttátel nélkül!
Érdekes dolog az igaz.
Én is láttam már ijet sőtt az opel motoroknál is van léptetőmotor használva a vezérlésnél 3.5Nm és 12 v.
de az indezit mosógépben is léptető motor pörgeti a dobot 300-1800 ig/az enyémben/ áttátel nélkül!
Érdekes dolog az igaz.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 26, 21:05
Írta: 000000000 Dátum 2006 szeptember 26, 21:05
Heló Lari!
Én is láttam már ijet sőtt az opel motoroknál is van léptetőmotor használva a vezérlésnél 3.5Nm és 12 v.
de az indezit mosógépben is léptető motor pörgeti a dobot 300-1800 ig/az enyémben/ áttátel nélkül!
Érdekes dolog az igaz.
Én is láttam már ijet sőtt az opel motoroknál is van léptetőmotor használva a vezérlésnél 3.5Nm és 12 v.
de az indezit mosógépben is léptető motor pörgeti a dobot 300-1800 ig/az enyémben/ áttátel nélkül!
Érdekes dolog az igaz.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 26, 21:07
Írta: 000000000 Dátum 2006 szeptember 26, 21:07
Heló Lari!
Én is láttam már ijet sőtt az opel motoroknál is van léptetőmotor használva a vezérlésnél 3.5Nm és 12 v.
de az indezit mosógépben is léptető motor pörgeti a dobot 300-1800 ig/az enyémben/ áttátel nélkül!
Érdekes dolog az igaz.
Én is láttam már ijet sőtt az opel motoroknál is van léptetőmotor használva a vezérlésnél 3.5Nm és 12 v.
de az indezit mosógépben is léptető motor pörgeti a dobot 300-1800 ig/az enyémben/ áttátel nélkül!
Érdekes dolog az igaz.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 27, 06:52
Írta: 000000000 Dátum 2006 szeptember 27, 06:52
A külső és belső légkeringtetés özött váltja a spalettákat át. Mekkora a kép (>2MB?)? Lehet, hogy az a baj vagy ékezetes nevet akartál feltölteni!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 27, 07:02
Írta: 000000000 Dátum 2006 szeptember 27, 07:02
Megnéztem "léptető 2 renault ventil.jpg" [#nezze]!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 27, 08:31
Írta: 000000000 Dátum 2006 szeptember 27, 08:31
Nem valószínű, hogy léptetőmotorról van szó. Szerintem inkább kefe nélküli (brushless) motorról. A panel aljába pedig valószínűleg a Hall-érzékelők és/vagy a vezérlő FET-ek vannak beforrasztva, így nem kell neki külön vezérlő elektronika. Ha léptetőmotornak használnád egy "kicsit" kicsi lenne a felbontása. Például a CD-ROM okban ugyanilyen elven működő motorokat szoktak használni. Előnyei: jó hatásfok, kis zaj, nincs szikrázás, nincs extra kopás.
Cím: Re:Léptetőmotor
Írta: lari Dátum 2006 szeptember 27, 09:25
Írta: lari Dátum 2006 szeptember 27, 09:25
Igazad van István!
Feltettem újra a képeket, renault lepteto, és renault lepteto 2 néven a file tárba.
Így már meg lehet nézni.
Feltettem újra a képeket, renault lepteto, és renault lepteto 2 néven a file tárba.
Így már meg lehet nézni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 27, 11:56
Írta: 000000000 Dátum 2006 szeptember 27, 11:56
Belinkeltem ide, hogy mindenki lássa miről is beszélünk:


Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 27, 11:57
Írta: 000000000 Dátum 2006 szeptember 27, 11:57
Ez nem véletlenül egy kefe nélküli DC motor?
Cím: Re:Léptetőmotor
Írta: lari Dátum 2006 szeptember 27, 12:25
Írta: lari Dátum 2006 szeptember 27, 12:25
Én eddig még kefe nélküli DC motorral nem találkoztam, de erről a ventil. motorról annyit még tudok mondani, hogy nyolcad fordulatonként lehet érezni, hogy megáll. Ezen felül megpróbáltam egy tekercsre 12V-ot kapcsolni, aminek hatására beállt egy pozícióba.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 szeptember 27, 12:58
Írta: 000000000 Dátum 2006 szeptember 27, 12:58
Ezek a jelek tényleg léptetőmotorra utalnak...
Cím: Re:Léptetőmotor
Írta: 6fgemi55d Dátum 2006 szeptember 28, 08:39
Írta: 6fgemi55d Dátum 2006 szeptember 28, 08:39
Tutira találkoztál már kefe nélküli DC motorral, és szerintem ez is az! A kis ventillátorok (amik a számítógépekben is vannak) kivétel nélkül kefenélküliek. Azok is általában negyed v. nyolcad fordulatonként "beállnak" kikapcsolt állapotban. Kell lennie benne egy kis elektronikának, ami a tekercsek polaritását kapcsolgatja, valamint a forgórészhez közel egy Hall-IC-nek, ami "figyeli" hogy éppen milyen pozícióban van a forgórész (az alapján váltogatja az elektronika a tekercsek polaritását)
Cím: Re:Léptetőmotor
Írta: tumnmsi57 Dátum 2006 október 05, 20:17
Írta: tumnmsi57 Dátum 2006 október 05, 20:17
Üdv mindenkinek!
SEGÍTSÉG kellene a motorjaim párosításához, illetve hogy H1-el mennek-e?
Melyiket melyik tengelyre?
Van 2db ilyen:
- Típus: SANYO DENKI CO. 103G742-0141 (Japan)
- Tekercsrendszer: két fázisú, Unipoláris (6 kivezetéses).
- Lépés: 1.8°/Step
- Feszültség: 3.8V=
- Áram: 1.75A
- Tekercs ellenállása: 2x2.17 Ohm/fázis
- Súlya: ~0.7kg
- Motortengely átmérője: 6.4 mm
- Felfogó csavartávolságok: 3x47mm (M4)
Van 1db ilyen:
- Típus: VEXTA PH265-E2,6B
- Tekercsrendszer: két fázisú, 8 kivezetéssel (UNI/BI)
- Lépés: 1.8°/Step
- Feszültség: 1,87V=
- Áram: 2,6
- Tekercs ellenállása: 0,72Ohm/fázis
- Súlya: 0,54kg
- Induktivítás: 0,9 mH/fázis
- Nyomaték: 0,41 Nm
Van 1db ilyen:
- Típus: PACIFIC POWERMAX P22NRXA-LDS-M1-02
- Tekercsrendszer: két fázisú, 8 kivezetéssel (UNI/BI)
- Lépés: 1.8°/Step
- Feszültség: 2,71V=
- Áram: 4,6A
- Nyomaték: 0,98 Nm
- Induktivítás: 0,8 mH/fázis
- Tekercs ellenállása: 0,42Ohm/fázis
- Súlya: 1,13kg
SEGÍTSÉG kellene a motorjaim párosításához, illetve hogy H1-el mennek-e?
Melyiket melyik tengelyre?
Van 2db ilyen:
- Típus: SANYO DENKI CO. 103G742-0141 (Japan)
- Tekercsrendszer: két fázisú, Unipoláris (6 kivezetéses).
- Lépés: 1.8°/Step
- Feszültség: 3.8V=
- Áram: 1.75A
- Tekercs ellenállása: 2x2.17 Ohm/fázis
- Súlya: ~0.7kg
- Motortengely átmérője: 6.4 mm
- Felfogó csavartávolságok: 3x47mm (M4)
Van 1db ilyen:
- Típus: VEXTA PH265-E2,6B
- Tekercsrendszer: két fázisú, 8 kivezetéssel (UNI/BI)
- Lépés: 1.8°/Step
- Feszültség: 1,87V=
- Áram: 2,6
- Tekercs ellenállása: 0,72Ohm/fázis
- Súlya: 0,54kg
- Induktivítás: 0,9 mH/fázis
- Nyomaték: 0,41 Nm
Van 1db ilyen:
- Típus: PACIFIC POWERMAX P22NRXA-LDS-M1-02
- Tekercsrendszer: két fázisú, 8 kivezetéssel (UNI/BI)
- Lépés: 1.8°/Step
- Feszültség: 2,71V=
- Áram: 4,6A
- Nyomaték: 0,98 Nm
- Induktivítás: 0,8 mH/fázis
- Tekercs ellenállása: 0,42Ohm/fázis
- Súlya: 1,13kg
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 október 06, 06:40
Írta: 000000000 Dátum 2006 október 06, 06:40
Szia!
Mindegyik megy (unipoláris kötésben természetesen)!
Egy, közös motortápról is mehetnek (a kisebb feszültségre adódó motortápot kell választani, ha kikalkulálod az egyes motorokhoz tartozó ideális feszültséget a tuningtényező függvényében).
Én úgy csinálnám, hogy megsaccolnám az egyes tengelyek nyomaték igényeit és a nagyobbhoz, nagyobb motort, a kisebbhez, kisebbet választanám (a legtöbbet cipelő tengely kapja a legerősebbet)!
Mindegyik megy (unipoláris kötésben természetesen)!
Egy, közös motortápról is mehetnek (a kisebb feszültségre adódó motortápot kell választani, ha kikalkulálod az egyes motorokhoz tartozó ideális feszültséget a tuningtényező függvényében).
Én úgy csinálnám, hogy megsaccolnám az egyes tengelyek nyomaték igényeit és a nagyobbhoz, nagyobb motort, a kisebbhez, kisebbet választanám (a legtöbbet cipelő tengely kapja a legerősebbet)!
Cím: Re:Léptetőmotor
Írta: Tibi Dátum 2006 október 10, 08:14
Írta: Tibi Dátum 2006 október 10, 08:14
Sziasztok!
Van 3 db eladó új
STP-42D201-32 léptetőmotor.
Adatai:
Shinano. Modell Nr.: STP-42D201-32
Step Angle: 1,8
Voltage: 3,7VDC
Current/Phase: 1,2A
Ressistance/Phase: 3,1Ohm
Inductance/Phase: 4,2mH
Holding Torque: 2,8Kg-cm
6000 Ft + postaköltség
Ha kell küldök fotót.
oreg59@t-online.hu
Van 3 db eladó új
STP-42D201-32 léptetőmotor.
Adatai:
Shinano. Modell Nr.: STP-42D201-32
Step Angle: 1,8
Voltage: 3,7VDC
Current/Phase: 1,2A
Ressistance/Phase: 3,1Ohm
Inductance/Phase: 4,2mH
Holding Torque: 2,8Kg-cm
6000 Ft + postaköltség
Ha kell küldök fotót.
oreg59@t-online.hu
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 október 12, 07:55
Írta: 000000000 Dátum 2006 október 12, 07:55
Sziasztok
Két kérdésben kérném a segítségeteket:
1. Tapasztalataitok szerint milyen fordulatszám tartomány az, ahol a léptetőmotorokat nyomatékosnak mondanátok (1/min)?
2. Lehet, hogy totál hülye a kérdés, de hogy lehetne kiszámítani egy léptetőmotor teljesítményét? Bordásszíj választáshoz kellene ez az adat, de bevallom nem tudom hogy lehetne kiszámolni - ha értelmezhető egyáltalán.
Két kérdésben kérném a segítségeteket:
1. Tapasztalataitok szerint milyen fordulatszám tartomány az, ahol a léptetőmotorokat nyomatékosnak mondanátok (1/min)?
2. Lehet, hogy totál hülye a kérdés, de hogy lehetne kiszámítani egy léptetőmotor teljesítményét? Bordásszíj választáshoz kellene ez az adat, de bevallom nem tudom hogy lehetne kiszámolni - ha értelmezhető egyáltalán.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 október 12, 08:16
Írta: 000000000 Dátum 2006 október 12, 08:16
Teljesítmény (W) = Nyomaték (Nm) * Fordulatszám (1/s) (Vigyázz, a fordulat nem ford/perc, hanem annak a 60-ad része ford/sec) Egyébként azt hiszem inkább a maximális nyomatékot kellene figyelembe venned, mert abból számolhatő az áttételek után a bordásszíjra ható max húzóerő.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 október 12, 08:42
Írta: 000000000 Dátum 2006 október 12, 08:42
Hello Coco!
Bocs Imi, de a képleted nem egészen helyes.
A motor hasznos teljesítményét (W)legegyszerűbben
úgy kapod meg, hogy a motor tengelyén mért
nyomatékot (Nm) megszorzod a szögsebességgel
(rad/s). A szögsebesség pedig 2*pi*n, ahol pi=~3.141, n fordulatszám (1/s).
Tibor45
Bocs Imi, de a képleted nem egészen helyes.
A motor hasznos teljesítményét (W)legegyszerűbben
úgy kapod meg, hogy a motor tengelyén mért
nyomatékot (Nm) megszorzod a szögsebességgel
(rad/s). A szögsebesség pedig 2*pi*n, ahol pi=~3.141, n fordulatszám (1/s).
Tibor45
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 október 12, 09:05
Írta: 000000000 Dátum 2006 október 12, 09:05
A második kérdésedre a válasz sokkal
összetettebb. Mielőtt megvásárolsz egy motort,
szerezd be róla a gyári fordulatszám-nyomaték
jelleggörbét. Ez általában így néz ki:
http://keptar.cjb.hu/pictures/nagy/stepM1.jpg-y9ctaknt.jpg
Ezen világosan látszik, hogy hol vannak a határpontok.
Azonban egy ilyen jelleggörbe nagyon sok
mindentől függ, hajtásod típusa (bipolásris-
unipoláris), léptetési mód (egész, fél, microstep) tekercsek bekötési módja, maximális
áramlimitek, tápegységed adatai, stb.
Ezért komoly gyártó a fenti adatokkal együtt
adja meg a jelleggörbét.
Sajnos azonban ezeket a csodás görbéket aztán
amikor kiméred a gyakorlatban a motorodat, soha nem fogod elérni, sőt van úgy, hogy a tizedét sem tudod kihozni.
Az én tapasztalatom az, hogy a legjobb minőségű
és drága motoroknál is 3-5 1/s fölött a nyomatékod lecsökken a névleges 20-50 %-ára.
Ezért javasolnám, hogy legegyszerűbben
egy súlyterhelésű tárcsával mérd ki a motorod
nyomatékát egész fordulatoknál, és erre alapozd
utána a géped lépésvesztés mentes működését.
Így nagyon sok bosszúságtól megkíméled magad,
és hasznos tapasztalatokat kapsz.
Üdv. Tibor45
összetettebb. Mielőtt megvásárolsz egy motort,
szerezd be róla a gyári fordulatszám-nyomaték
jelleggörbét. Ez általában így néz ki:
http://keptar.cjb.hu/pictures/nagy/stepM1.jpg-y9ctaknt.jpg
Ezen világosan látszik, hogy hol vannak a határpontok.
Azonban egy ilyen jelleggörbe nagyon sok
mindentől függ, hajtásod típusa (bipolásris-
unipoláris), léptetési mód (egész, fél, microstep) tekercsek bekötési módja, maximális
áramlimitek, tápegységed adatai, stb.
Ezért komoly gyártó a fenti adatokkal együtt
adja meg a jelleggörbét.
Sajnos azonban ezeket a csodás görbéket aztán
amikor kiméred a gyakorlatban a motorodat, soha nem fogod elérni, sőt van úgy, hogy a tizedét sem tudod kihozni.
Az én tapasztalatom az, hogy a legjobb minőségű
és drága motoroknál is 3-5 1/s fölött a nyomatékod lecsökken a névleges 20-50 %-ára.
Ezért javasolnám, hogy legegyszerűbben
egy súlyterhelésű tárcsával mérd ki a motorod
nyomatékát egész fordulatoknál, és erre alapozd
utána a géped lépésvesztés mentes működését.
Így nagyon sok bosszúságtól megkíméled magad,
és hasznos tapasztalatokat kapsz.
Üdv. Tibor45
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 október 12, 10:45
Írta: 000000000 Dátum 2006 október 12, 10:45
Kössz a kiigazítást!
Cím: Re:Léptetőmotor
Írta: Bicska Dátum 2006 október 15, 20:20
Írta: Bicska Dátum 2006 október 15, 20:20
A sanyo-denki góliát motornak mi a szériaszáma? Előre is köszi, Üdv!
Cím: Re:Léptetőmotor
Írta: 5bzs27u7 Dátum 2006 október 16, 04:49
Írta: 5bzs27u7 Dátum 2006 október 16, 04:49
103H8221-103H82XX
Cím: Re:Léptetőmotor
Írta: Bicska Dátum 2006 október 16, 20:23
Írta: Bicska Dátum 2006 október 16, 20:23
[#worship]
Cím: Re:Léptetőmotor
Írta: Bicska Dátum 2006 október 16, 20:25
Írta: Bicska Dátum 2006 október 16, 20:25
[#worship]
Cím: Re:Léptetőmotor
Írta: Bicska Dátum 2006 október 16, 20:26
Írta: Bicska Dátum 2006 október 16, 20:26
[#worship]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 október 23, 12:52
Írta: 000000000 Dátum 2006 október 23, 12:52
Erről tudtok valami infót, mert pár fényképen kívül nem sok mindent találtam róla:
epson léptető motor
EM-34 széria
EM-93 széria
40 x 40 x 31mm mindegyik
epson léptető motor
EM-34 széria
EM-93 széria
40 x 40 x 31mm mindegyik
Cím: Re:Léptetőmotor
Írta: dg8n4i8x Dátum 2006 november 05, 19:10
Írta: dg8n4i8x Dátum 2006 november 05, 19:10
Sziasztok!
Használ valaki nema23 23SM100-30-8W-F10.F10-2.0 motort vagy hasonló paraméterekkel rendelkezőt?
Következők a paraméterei:
1.5A
1.4Ohm
2.1V
3mH
2Nm
Ha valakinek van ilyen vagy hasonló motorhoz működő PWM setup-ja Profi1-hez kérem segítsen!
Előre is köszönöm!
Balu
Használ valaki nema23 23SM100-30-8W-F10.F10-2.0 motort vagy hasonló paraméterekkel rendelkezőt?
Következők a paraméterei:
1.5A
1.4Ohm
2.1V
3mH
2Nm
Ha valakinek van ilyen vagy hasonló motorhoz működő PWM setup-ja Profi1-hez kérem segítsen!
Előre is köszönöm!
Balu
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 november 06, 06:58
Írta: 000000000 Dátum 2006 november 06, 06:58
Használd a Motortuning megfigyelés rész leírásban olvashatókat (felfuttatás és rángásmentes futás keresése)!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2006 november 10, 10:12
Írta: bmejdz9nu Dátum 2006 november 10, 10:12
S.O.S....
Létezik olyan bipoláris motor amilyeknek 8 kivezetése van?
Ki lehet mérni mind d 4 tekercset külön-külön.
A H1-el meg meg csak izeg - zörög?
Na most jó helyre irtam...
Létezik olyan bipoláris motor amilyeknek 8 kivezetése van?
Ki lehet mérni mind d 4 tekercset külön-külön.
A H1-el meg meg csak izeg - zörög?
Na most jó helyre irtam...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 november 10, 10:15
Írta: 000000000 Dátum 2006 november 10, 10:15
Nem. A bipolárisnak 4 kivezetése van. A 8 kivezetéses motor univerzális motor (mindkét típusnak elköthető)!
A 8 kivezetéses motort el kell kötni unipolárisnak (6 kivezetésesnek), lásd a Léptetőmotorok/Bontott motorok végénél a leírásomat!
A 8 kivezetéses motort el kell kötni unipolárisnak (6 kivezetésesnek), lásd a Léptetőmotorok/Bontott motorok végénél a leírásomat!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2006 november 10, 10:32
Írta: bmejdz9nu Dátum 2006 november 10, 10:32
Köszi a gyors választ, de ez alapján jártam el és van adatlap is, de szo..
Jó az a leírás! Most már kapiszka hogy működik a dolog...
Erről a motorrol van szó:

PowerMax II. bekötési rajz. pdf
Csak attól ijedtem ami rá van írva motorra: "unipolar series"... meg, hogy nem megy...
Jó az a leírás! Most már kapiszka hogy működik a dolog...
Erről a motorrol van szó:
PowerMax II. bekötési rajz. pdf
Csak attól ijedtem ami rá van írva motorra: "unipolar series"... meg, hogy nem megy...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 november 10, 10:45
Írta: 000000000 Dátum 2006 november 10, 10:45
A leírás világos!
Neked ez kell:
6-Lead connection
(Unipolar)
Neked ez kell:
6-Lead connection
(Unipolar)
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2006 november 10, 11:07
Írta: bmejdz9nu Dátum 2006 november 10, 11:07
Akkor a remény él !
Ez a h..e felírat megíjesztett...
Köszi a tanácsot...
Ez a h..e felírat megíjesztett...
Köszi a tanácsot...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2006 november 10, 18:43
Írta: bmejdz9nu Dátum 2006 november 10, 18:43
Müködik. Happy.
Hogy én miket tudok...
Nagyon jók ezek a motorok.
Biztos amikor meglátta az őrült nagy tengelyeimet megijedt, hogy egész életébe ezt kell hajtania...
... az anya a meneten is nagyobb nála...
Hogy én miket tudok...
Nagyon jók ezek a motorok.
Biztos amikor meglátta az őrült nagy tengelyeimet megijedt, hogy egész életébe ezt kell hajtania...
... az anya a meneten is nagyobb nála...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 november 10, 18:45
Írta: 000000000 Dátum 2006 november 10, 18:45
[#taps]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 november 10, 20:50
Írta: 000000000 Dátum 2006 november 10, 20:50
A 2,8 A bipolar series azt jelentheti, hogy 2-2 db tekercset sorosan kötve bipoláris módban a kütyüt 2,8 A-el lehet terhelni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 november 13, 08:21
Írta: 000000000 Dátum 2006 november 13, 08:21
Hello
kis infot szeretnél. most készűlök egy gépet építeni és nem tudom mekkora ?Nm es motort vállaszak. A halytás menetes szárral lenne.
kis infot szeretnél. most készűlök egy gépet építeni és nem tudom mekkora ?Nm es motort vállaszak. A halytás menetes szárral lenne.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 november 13, 11:04
Írta: 000000000 Dátum 2006 november 13, 11:04
Az a geptol fugg...
de ha valami kis hobby celu maro
vagy habvago gep lesz
akkor 1,5-2 Nm-es mar kb jo kezdesnek...
de ha valami kis hobby celu maro
vagy habvago gep lesz
akkor 1,5-2 Nm-es mar kb jo kezdesnek...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 november 16, 10:37
Írta: 000000000 Dátum 2006 november 16, 10:37
Segítsetek!
Van kétfajta motorom az egyik:
EM-242
STH-39H112
a másik:
EM-284
STP-42D221-01
Kérdésem, hogy valaki megtudná-e mondani, hogy a műszaki paramétereit hol lehet megtalálni a két motornak, vagy esetleg valami infót valaki tud-e róluk?
Mind a két motor EPSON nyomtatóba volt.
Üdv.: KaCsa [#papakacsint]
Van kétfajta motorom az egyik:
EM-242
STH-39H112
a másik:
EM-284
STP-42D221-01
Kérdésem, hogy valaki megtudná-e mondani, hogy a műszaki paramétereit hol lehet megtalálni a két motornak, vagy esetleg valami infót valaki tud-e róluk?
Mind a két motor EPSON nyomtatóba volt.
Üdv.: KaCsa [#papakacsint]
Cím: Re:Léptetőmotor
Írta: eivmhrm04 Dátum 2006 december 02, 00:48
Írta: eivmhrm04 Dátum 2006 december 02, 00:48
Üdv mindenkinek.Nem tudja valaki milyen adatai vannak a H31NRFC-TNN-NS-00 tipusú motornak?SIGMA pacific scientific a gyártó.
Cím: Re:Léptetőmotor
Írta: eivmhrm04 Dátum 2006 december 02, 01:10
Írta: eivmhrm04 Dátum 2006 december 02, 01:10
Segitsen valaki
Van 1 sanyo denki 1,8v 3A 1,8step
typ103g770-2311
van 1 sanyo denki 2,6V 3,1A 1,8 step
typ103g715-1240 van 1sigma pacific scientific Ennek viszont nem tudom az adatait/nagy/
Kérdésem az lenne: elég erősek leszneke ,és lehete őket egy tápról vezérelni s ha lehet mekkora feszültségüvel?/van egy bazi nagy 24V trfóm.Előre is köszönom.
Van 1 sanyo denki 1,8v 3A 1,8step
typ103g770-2311
van 1 sanyo denki 2,6V 3,1A 1,8 step
typ103g715-1240 van 1sigma pacific scientific Ennek viszont nem tudom az adatait/nagy/
Kérdésem az lenne: elég erősek leszneke ,és lehete őket egy tápról vezérelni s ha lehet mekkora feszültségüvel?/van egy bazi nagy 24V trfóm.Előre is köszönom.
Cím: Re:Léptetőmotor
Írta: eivmhrm04 Dátum 2006 december 02, 10:49
Írta: eivmhrm04 Dátum 2006 december 02, 10:49
Ja és még nemtudom egyiknek sem a nyomatékát.Ha valaki tudná megköszönném.
Cím: Re:Léptetőmotor
Írta: yuagaci9g Dátum 2006 december 02, 13:59
Írta: yuagaci9g Dátum 2006 december 02, 13:59
Sanyo Denki pdf a Peter honlapjan, miert nem hasznalod?
Leptetomotorok a Sayo Denkitol
Leptetomotorok a Sayo Denkitol
Cím: Re:Léptetőmotor
Írta: eivmhrm04 Dátum 2006 december 02, 14:58
Írta: eivmhrm04 Dátum 2006 december 02, 14:58
Köszi de ottan sem találom,egyiket sem
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2006 december 02, 16:04
Írta: bmejdz9nu Dátum 2006 december 02, 16:04
Látod nem veszik észre mennyi infó van ott...
CNC képek, videók, pdf-ek garmadával...
CNC képek, videók, pdf-ek garmadával...
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2006 december 02, 21:17
Írta: Kristály Árpád Dátum 2006 december 02, 21:17
Köszönjük Péter!
Nem is mondtad, hogy Sopronban újra tavasz van!
Rajzanak a "cserebogarak"......
Aprópó..........
Két bogár szexel, a harmadik meg nézi, jön a negyedik,... maga a cserebogár....
Nem, én csak nézem!
Hi....Hi....
Nem is mondtad, hogy Sopronban újra tavasz van!
Rajzanak a "cserebogarak"......
Aprópó..........
Két bogár szexel, a harmadik meg nézi, jön a negyedik,... maga a cserebogár....
Nem, én csak nézem!
Hi....Hi....
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2006 december 02, 22:54
Írta: bmejdz9nu Dátum 2006 december 02, 22:54
Nyugaton a helyzet változatlan...
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2006 december 03, 16:20
Írta: Kristály Árpád Dátum 2006 december 03, 16:20
Jó nektek.....
Mármint nyugatiaknak, ha szaladni kell.... közel a grenze.........
Mármint nyugatiaknak, ha szaladni kell.... közel a grenze.........
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2006 december 03, 23:11
Írta: bmejdz9nu Dátum 2006 december 03, 23:11
Miért? Jó a grenze ..
Már nem viszünk cigit a Mariahilfére..??? Meg videót sem hozunk?
Na persze van minden ide-odaát szép pénzért..
Árpinak mondtam, hogy kellene egy osztrák -magyar CNC talit csinálni... nem lenne semmi..
Leesne az áluk, hogy lesz egy rossz nyomtatóból és porszívóból CNC...
Persze itt sopronban ... nem kellene utaznom...
Ők elmesélnék mit hol lehet kapni. mi meg hogy hol vannak a MÉH telepek...
A fődíj persze magyaros lenne: Aki a legolcsóbban hozta össze a gépét az kapja a kupát... amit az osztrákok marnak az 5 tengelyesen...
Tényleg... kimegyek kukázni ausztriába... nem is rossz... mik lehetnek ott?
Már nem viszünk cigit a Mariahilfére..??? Meg videót sem hozunk?
Na persze van minden ide-odaát szép pénzért..
Árpinak mondtam, hogy kellene egy osztrák -magyar CNC talit csinálni... nem lenne semmi..
Leesne az áluk, hogy lesz egy rossz nyomtatóból és porszívóból CNC...
Persze itt sopronban ... nem kellene utaznom...
Ők elmesélnék mit hol lehet kapni. mi meg hogy hol vannak a MÉH telepek...
A fődíj persze magyaros lenne: Aki a legolcsóbban hozta össze a gépét az kapja a kupát... amit az osztrákok marnak az 5 tengelyesen...
Tényleg... kimegyek kukázni ausztriába... nem is rossz... mik lehetnek ott?
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2006 december 03, 23:21
Írta: Kristály Árpád Dátum 2006 december 03, 23:21
Megyek veled... Mertha viszel?
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2006 december 03, 23:27
Írta: bmejdz9nu Dátum 2006 december 03, 23:27
Most voltál? Jössz megint... A neten meg kellene keresni a legnagyobb MÉH telepeket...
Biztos olyan már náluk a szelekció, hogy erősen válogatottak az anyagok...
Mindíg arról álmodok: hogy kint kukázom a 300 dolláros tengelyeket...
Te leszel a Technical Guide master...
A Hungarian Robotics Education redszerbe...
Biztos olyan már náluk a szelekció, hogy erősen válogatottak az anyagok...
Mindíg arról álmodok: hogy kint kukázom a 300 dolláros tengelyeket...
Te leszel a Technical Guide master...
A Hungarian Robotics Education redszerbe...
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2006 december 04, 11:00
Írta: Kristály Árpád Dátum 2006 december 04, 11:00
Oké!
Ráadásul van egy előnye, nem kell álruhába öltőzni!
Ráadásul van egy előnye, nem kell álruhába öltőzni!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 04, 14:16
Írta: 000000000 Dátum 2006 december 04, 14:16
Egyszer egy haverom kiment lomtalanítani Ausztriába, hazahozott egy 750-es sportmotort, a típusára már nem emlékszem, de valami filléres motorbaja volt. Az okosok meg kidobták. Megcsinálta és továbbadta néhány százezerért.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 04, 14:21
Írta: 000000000 Dátum 2006 december 04, 14:21
Akikek én szoktam dolgozni, az egy igen nagy cég, egyszer próbáltam elkunyerálni egy leselejtezett 8 éves CNC gépet, de üzleti titokra hivatkozva nem adták, inkább bezúzták[#szomoru1].
Pedig fizettem is volna érte valamennyit. Persze a cég nem Magyar, a magyarok nem csinálnak ilyet :)
Pedig fizettem is volna érte valamennyit. Persze a cég nem Magyar, a magyarok nem csinálnak ilyet :)
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2006 december 04, 15:34
Írta: bmejdz9nu Dátum 2006 december 04, 15:34
CNC témában - géptemetőbe - az mások (mert sokan vannak) nem tudják mire jó...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 04, 16:27
Írta: 000000000 Dátum 2006 december 04, 16:27
Pont az, hogy tudják mire jó és mivel ezek spéci gépek, spéci a technológia, nem merték eladni, nehogy a technológia kiszivárogjon, mert akkor jönnek a kínaiak :)))
Cím: Re:Léptetőmotor
Írta: Bicska Dátum 2006 december 04, 20:04
Írta: Bicska Dátum 2006 december 04, 20:04
Ez a kukázósdi megelevenedik a discoveryin a junkyard c. műsorban. Bár én lehetetlennek tartom, hogy külföldön ilyen egy valódi vastelep..(ha 50%-ban igaz, az is dúrva..)
Cím: Re:Léptetőmotor
Írta: tumnmsi57 Dátum 2006 december 05, 19:33
Írta: tumnmsi57 Dátum 2006 december 05, 19:33
Nem kell meglepődniaz ausztriai lomtalanításon!
Én dunántúli vagyok (Veszprém megye) és ott a barna bőrű kisebbség ebből él. Kimegy, felpakol behozza és eladja. Nem hiszitek el hogy élnek belőle. (A6-os Audi, 2 dobozos furgon stb)
Én dunántúli vagyok (Veszprém megye) és ott a barna bőrű kisebbség ebből él. Kimegy, felpakol behozza és eladja. Nem hiszitek el hogy élnek belőle. (A6-os Audi, 2 dobozos furgon stb)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 05, 20:18
Írta: 000000000 Dátum 2006 december 05, 20:18
Off,
hol laksz pontosan?
hol laksz pontosan?
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2006 december 05, 20:34
Írta: bmejdz9nu Dátum 2006 december 05, 20:34
Na mesélhetnék a kukázásról...
Egy amcsitól rendeltem egy DC motort szép lassan kb. egy hónap múlva itt lesz... Olcsó postával... nehéz.. 1/8 Hp... 20 USD... szállítás meg egy picit több... szinte vadi új...
Mesélte az amcsi hogy egy MÉH telep mellett lakik. Anyukája mindíg mondta neki milyen rossz helyen laknak... Most a srác ebből él - megírtak alapján nem is rosszul - az ablakból látja mikor jön anyag... Aztán felnyomja az Ebay-ra... A vicc - azt írta - a posta is csak 100 méterre van... Ezer eladása van két év alat!!! Persze ért a mechanikához és az elektronikához is... annyíra biztos amennyíre kell...
Egy amcsitól rendeltem egy DC motort szép lassan kb. egy hónap múlva itt lesz... Olcsó postával... nehéz.. 1/8 Hp... 20 USD... szállítás meg egy picit több... szinte vadi új...
Mesélte az amcsi hogy egy MÉH telep mellett lakik. Anyukája mindíg mondta neki milyen rossz helyen laknak... Most a srác ebből él - megírtak alapján nem is rosszul - az ablakból látja mikor jön anyag... Aztán felnyomja az Ebay-ra... A vicc - azt írta - a posta is csak 100 méterre van... Ezer eladása van két év alat!!! Persze ért a mechanikához és az elektronikához is... annyíra biztos amennyíre kell...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2006 december 05, 20:38
Írta: bmejdz9nu Dátum 2006 december 05, 20:38
Na mesélek a kukázásról...
Egy amcsitól rendeltem egy DC motort szép lassan kb. egy hónap múlva itt lesz... Olcsó postával... nehéz.. 1/8 Hp... 20 USD... szállítás meg egy picit több... szinte vadi új...
Mesélte az amcsi hogy egy MÉH telep mellett lakik. Anyukája mindíg mondta neki milyen rossz helyen laknak... Most a srác ebből él - megírtak alapján nem is rosszul - az ablakból látja mikor jön anyag... Aztán felnyomja az Ebay-ra... A vicc - azt írta - a posta is csak 100 méterre van... Ezer eladása van két év alat!!! Persze ért a mechanikához és az elektronikához is... annyíra biztos amennyíre kell...
Egy amcsitól rendeltem egy DC motort szép lassan kb. egy hónap múlva itt lesz... Olcsó postával... nehéz.. 1/8 Hp... 20 USD... szállítás meg egy picit több... szinte vadi új...
Mesélte az amcsi hogy egy MÉH telep mellett lakik. Anyukája mindíg mondta neki milyen rossz helyen laknak... Most a srác ebből él - megírtak alapján nem is rosszul - az ablakból látja mikor jön anyag... Aztán felnyomja az Ebay-ra... A vicc - azt írta - a posta is csak 100 méterre van... Ezer eladása van két év alat!!! Persze ért a mechanikához és az elektronikához is... annyíra biztos amennyíre kell...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2006 december 05, 20:39
Írta: bmejdz9nu Dátum 2006 december 05, 20:39
Na mesélek a kukázásról...
Egy amcsitól rendeltem egy DC motort szép lassan kb. egy hónap múlva itt lesz... Olcsó postával... nehéz.. 1/8 Hp... 20 USD... szállítás meg egy picit több... szinte vadi új...
Mesélte az amcsi hogy egy MÉH telep mellett lakik. Anyukája mindíg mondta neki milyen rossz helyen laknak... Most a srác ebből él - megírtak alapján nem is rosszul - az ablakból látja mikor jön anyag... Aztán felnyomja az Ebay-ra... A vicc - azt írta - a posta is csak 100 méterre van... Ezer eladása van két év alat!!! Persze ért a mechanikához és az elektronikához is... annyíra biztos amennyíre kell...
Egy amcsitól rendeltem egy DC motort szép lassan kb. egy hónap múlva itt lesz... Olcsó postával... nehéz.. 1/8 Hp... 20 USD... szállítás meg egy picit több... szinte vadi új...
Mesélte az amcsi hogy egy MÉH telep mellett lakik. Anyukája mindíg mondta neki milyen rossz helyen laknak... Most a srác ebből él - megírtak alapján nem is rosszul - az ablakból látja mikor jön anyag... Aztán felnyomja az Ebay-ra... A vicc - azt írta - a posta is csak 100 méterre van... Ezer eladása van két év alat!!! Persze ért a mechanikához és az elektronikához is... annyíra biztos amennyíre kell...
Cím: Re:Léptetőmotor
Írta: tumnmsi57 Dátum 2006 december 05, 20:48
Írta: tumnmsi57 Dátum 2006 december 05, 20:48
Sümegtől nem messze egy kis faluban. Ez az otthonom a mai napig. A munka miatt hétközben viszont Pesten vagyok
Cím: Re:Léptetőmotor
Írta: tumnmsi57 Dátum 2006 december 05, 20:56
Írta: tumnmsi57 Dátum 2006 december 05, 20:56
Ha valakit érdekelnek használt cuccok (nem CNC-s, pl bicikli, síléc, tv, bontott, de jó minőségű ablak, ajtó, fűnyiró, bútorok, egyszóval minden nem is tudom sorolni)ajánlom Devecser nevű "várost". Ott a lakosság kb 70%-a kisebbségi és ennek kb 80 % ebből él. Nem vicc. Hihetelen mennyiségű cucc. Mész egyik háztól a másikig és vásárolsz. Csak nem menj egyedül. Ha több mindent veszel egy helyen jól lehet alkudni.
Soknak van "felvásárlója". Jönnek a keleti országrészből IFÁ-val és viszik a cuccot.
Pl: Elvittek az orrom elől egy bőr ülőgarniturát. 2 fotel, egy 2-es és egy 3-as ülő 60 ezer.
Soknak van "felvásárlója". Jönnek a keleti országrészből IFÁ-val és viszik a cuccot.
Pl: Elvittek az orrom elől egy bőr ülőgarniturát. 2 fotel, egy 2-es és egy 3-as ülő 60 ezer.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2006 december 05, 21:03
Írta: bmejdz9nu Dátum 2006 december 05, 21:03
És a kisebbség tudja hogy melyik golyósorsó melyik... vagy a lineáris vezetőkből nem konyhai fiók görgő lesz?
===== kellene csinálni kukázós topikot...
vagy átmenni a csevegőbe mert ezt a léptetőmotor topikot is elrontjuk...
===== kellene csinálni kukázós topikot...
vagy átmenni a csevegőbe mert ezt a léptetőmotor topikot is elrontjuk...
Cím: Re:Léptetőmotor
Írta: tumnmsi57 Dátum 2006 december 05, 21:15
Írta: tumnmsi57 Dátum 2006 december 05, 21:15
OK, akkor léptetőmotor téma:
Mennek a motorjaim, de eszméletlenűl vísítanak álló helyzetben. Hogy lehet csökkenteni?
Mennek a motorjaim, de eszméletlenűl vísítanak álló helyzetben. Hogy lehet csökkenteni?
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2006 december 05, 22:20
Írta: bmejdz9nu Dátum 2006 december 05, 22:20
Ha a megoldást metaláltad nekem szólj elsőként... Akkor neked adom a három hungarocell dobozt amiket a motorjaimhoz terveztem...
Én sem vagyok Hi-Fista...
Ha megunom szervóra váltok...
Apropó a szervónál mi tartja meg állóhelyzetben a motort?
Én sem vagyok Hi-Fista...
Ha megunom szervóra váltok...
Apropó a szervónál mi tartja meg állóhelyzetben a motort?
Cím: Re:Léptetőmotor
Írta: tumnmsi57 Dátum 2006 december 05, 22:48
Írta: tumnmsi57 Dátum 2006 december 05, 22:48
Én is dobozolni akarom a mocikat, de azért mert mindegyikhez terveztem ventillátoros hűtést
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 05, 23:05
Írta: 000000000 Dátum 2006 december 05, 23:05
Szia Péter!
Egy szervónál állandóan ott a visszacsatolt
mért encoder jel. Ha ez azonos az aktuális
kívánt pozícióval, akkor minek tartani?
Ha meg nem, a szervo PID algoritmusokkal úgyis
rákényszeríti mindig a motorra a kiadott
pozíciót. Persze vannak setup lehetőségek akkor
is, ha 0 a hibajel, de alapesetben ezzel nem
kell foglalkozni. Így szinte teljesen hidegek
maradhatnak a motorok álló helyzetben.
Üdv.:Tibor45
Egy szervónál állandóan ott a visszacsatolt
mért encoder jel. Ha ez azonos az aktuális
kívánt pozícióval, akkor minek tartani?
Ha meg nem, a szervo PID algoritmusokkal úgyis
rákényszeríti mindig a motorra a kiadott
pozíciót. Persze vannak setup lehetőségek akkor
is, ha 0 a hibajel, de alapesetben ezzel nem
kell foglalkozni. Így szinte teljesen hidegek
maradhatnak a motorok álló helyzetben.
Üdv.:Tibor45
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2006 december 05, 23:24
Írta: bmejdz9nu Dátum 2006 december 05, 23:24
A ventlátor mellett kimegy a zaj... vízhűtés? Zárt...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2006 december 05, 23:29
Írta: bmejdz9nu Dátum 2006 december 05, 23:29
Ja értem, de aggodalmaim vannak a szervóval kapcsolatban... Ezek a szervó vezérlők step-dir komatibilisek? Kompatibilisek minden ilyen jellegű programmal? Pl. Amit én használok WinPc-nc-vel? hogyan teszik ezt? Ezek a programok ugyebár léptető motorokhoz lettek kifejlesztve?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 05, 23:46
Írta: 000000000 Dátum 2006 december 05, 23:46
Minimálisra lehet csökkenteni a zajt, egy hajtogatott csővel, amit a ventilátor elé teszel. Van valami szakszerű megnevezése, csak nem jut az eszembe. Úgy működik, hogy a belső fal hangelnyelő anyaggal van burkolva. A járatban ide-oda verődik a hang, csökken jóval a hangereje. (Ez valami hihetetlenül szakszerűre sikeredet...)
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2006 december 06, 00:09
Írta: bmejdz9nu Dátum 2006 december 06, 00:09
Beépítek a CNC-be egy erős végfokot mp3 lejátszással és bömböltetem... ez a tuti..
Olyan lesz mint a k....i zseblámpa - rádió is van benne...
Olyan lesz mint a k....i zseblámpa - rádió is van benne...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 06, 06:39
Írta: 000000000 Dátum 2006 december 06, 06:39
Ha H1-et használsz, van "néma" üzemmódaja (olvasd át a leírást, minr mindig), csak akkor jobban melegszik minden!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 06, 08:09
Írta: 000000000 Dátum 2006 december 06, 08:09
Mire jó a léptecsek sipítását csokkenteni? Ha bekapcsolod a marómotort az úgyis túlordít mindent![#crazya]
Cím: Re:Léptetőmotor
Írta: e7c897sd8 Dátum 2006 december 06, 08:45
Írta: e7c897sd8 Dátum 2006 december 06, 08:45
Kivétel ha lézert használsz! [#wink]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 06, 08:56
Írta: 000000000 Dátum 2006 december 06, 08:56
El olvastam a leírást, csak nem tudom jól e értettem meg. A néma mód-nál osze kell kotni a 4-5 lábat kábellel vagy csak érinteni?
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2006 december 06, 09:23
Írta: bmejdz9nu Dátum 2006 december 06, 09:23
H1
Én próbáltam ezt a "néma üzemmódot" de nem némult el !!! csak kevésbé de fütyült.
A melegedés nem lenne gond... jó nagyok a motorok... meg majd hűtöm ha kell...
Valamit rosszul csináltam? Másnak teljesen elhalkul? Ilyenkor milyen vezérlést kap, hogy néma legyen? A frekvencia megy fel hallótartomány fölé vagy "egyenáramra" vált?
Én próbáltam ezt a "néma üzemmódot" de nem némult el !!! csak kevésbé de fütyült.
A melegedés nem lenne gond... jó nagyok a motorok... meg majd hűtöm ha kell...
Valamit rosszul csináltam? Másnak teljesen elhalkul? Ilyenkor milyen vezérlést kap, hogy néma legyen? A frekvencia megy fel hallótartomány fölé vagy "egyenáramra" vált?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 06, 09:53
Írta: 000000000 Dátum 2006 december 06, 09:53
Biztos rosszul csináltál valamit (olvasd át a leírás még egyszer), szinte teljesen el kell némulnia (pontosabban olyan magas lesz a freki, hogy az már szinte nem is generál hangot a vasban)!
Jumperrel (pici rádubom-összekötődik sapka, mint a PC-knél szokásos használni) kell összekötni (a DSP csak indításkor ellenőrzi a jumper állapotát, így bekapcsoláskor legyen rajta minimum (configurálás)!
Ezen állapotban nincsen plusz PWM szünet adva az áramkorláthoz, így full gerjesztéssel megy (mintha folyamatosan Steppelne). Ezen állapotban a PWM frekije a motor alapfeszültség és motortáp hányadosa alapján szabályozódik (teljesítmény stabilizálás).
Kitöltési tényezőjét a DSP teljes gerjesztésnek megfelelően szabályozza (frekija akár 100kHz-is lehet)!
Jumperrel (pici rádubom-összekötődik sapka, mint a PC-knél szokásos használni) kell összekötni (a DSP csak indításkor ellenőrzi a jumper állapotát, így bekapcsoláskor legyen rajta minimum (configurálás)!
Ezen állapotban nincsen plusz PWM szünet adva az áramkorláthoz, így full gerjesztéssel megy (mintha folyamatosan Steppelne). Ezen állapotban a PWM frekije a motor alapfeszültség és motortáp hányadosa alapján szabályozódik (teljesítmény stabilizálás).
Kitöltési tényezőjét a DSP teljes gerjesztésnek megfelelően szabályozza (frekija akár 100kHz-is lehet)!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2006 december 06, 10:45
Írta: bmejdz9nu Dátum 2006 december 06, 10:45
H1
Mint talán emlékszel a talin mondtam a jumper hiányát a szállításban... De találtam...
Természetesen újraindítottam...
Határozott változás történt, halkabb lett, a motorok elkezdtek melegedni...
tehát talán jó volt a jumper-elés.
De ciripeltek továbbra is elég jól...
Azért írom múlt időben mert a tali előtt probáltam... azóta nem... mert élesben csak akkor lesz rá szükség ha kész a mechanika... ez hamarosan bekövetkezik... (reményeim szerint)
Amí eddígi tapasztalatom: ha nem néma az üzemmód nagyon sipol... ha "néma" kevésbé de zavaró... Lehet hogy csak az én vezérlőmben pl. a freki nem megy fel eléggé? Ez lehetséges?
Persze ha bekapcsolom a Kress marógépet akkor "minden gond elmúlik" mert az olyan hangos...
A német gépem is "sipol" vagyis inkább ez zörög.... de ha párat léptetek vele van úgy hogy teljesen elhalkul...
Még nem analizáltam ezt a vezérlőt, de mind a 8 motorvezeték belemegy a dobozba....
Azt gondolom unipoláris lehet...
Talán Hi-Fi mániás vagyok egyedülálló hallásommal? Akkoriban - valmikor gitározni bírtam megtanulni...
Mint talán emlékszel a talin mondtam a jumper hiányát a szállításban... De találtam...
Természetesen újraindítottam...
Határozott változás történt, halkabb lett, a motorok elkezdtek melegedni...
tehát talán jó volt a jumper-elés.
De ciripeltek továbbra is elég jól...
Azért írom múlt időben mert a tali előtt probáltam... azóta nem... mert élesben csak akkor lesz rá szükség ha kész a mechanika... ez hamarosan bekövetkezik... (reményeim szerint)
Amí eddígi tapasztalatom: ha nem néma az üzemmód nagyon sipol... ha "néma" kevésbé de zavaró... Lehet hogy csak az én vezérlőmben pl. a freki nem megy fel eléggé? Ez lehetséges?
Persze ha bekapcsolom a Kress marógépet akkor "minden gond elmúlik" mert az olyan hangos...
A német gépem is "sipol" vagyis inkább ez zörög.... de ha párat léptetek vele van úgy hogy teljesen elhalkul...
Még nem analizáltam ezt a vezérlőt, de mind a 8 motorvezeték belemegy a dobozba....
Azt gondolom unipoláris lehet...
Talán Hi-Fi mániás vagyok egyedülálló hallásommal? Akkoriban - valmikor gitározni bírtam megtanulni...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2006 december 06, 10:48
Írta: bmejdz9nu Dátum 2006 december 06, 10:48
A gitározásból a nagyon fontos - NEM - szó kimardt... tehát botfülű vagyok...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 06, 11:01
Írta: 000000000 Dátum 2006 december 06, 11:01
A sípolás mértéke a motorodtól is függ (fesz arányok).
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2006 december 06, 11:16
Írta: bmejdz9nu Dátum 2006 december 06, 11:16
Eddig 2 motorral probáltam, a kisebb kb. 1Nm-es PowerMax-II vel és a Sanyo-Denki 4.6 A-es-el...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 06, 12:41
Írta: 000000000 Dátum 2006 december 06, 12:41
Szia István!
Nem akarok beleokoskodni, csak egy tanács, hogy a PWM alapfrekivel nem célszerű 20..25 kHz felé menni, mert a tranzisztorok izzani fognak :(
Nem véletlenül használnak szinte minden vezérlőben 20kHz-es frekvenciát.
Nem akarok beleokoskodni, csak egy tanács, hogy a PWM alapfrekivel nem célszerű 20..25 kHz felé menni, mert a tranzisztorok izzani fognak :(
Nem véletlenül használnak szinte minden vezérlőben 20kHz-es frekvenciát.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 06, 13:12
Írta: 000000000 Dátum 2006 december 06, 13:12
Tudom, ismerem a jelenséget!
[#circling]
[#circling]
Cím: Re:Léptetőmotor
Írta: tumnmsi57 Dátum 2006 december 06, 19:05
Írta: tumnmsi57 Dátum 2006 december 06, 19:05
A tekercsek csatolása nem szólhat bele ebbe a sípolásba??
Amúgy a jumperrel nekem is csökkent, de nem hallgat el
Amúgy a jumperrel nekem is csökkent, de nem hallgat el
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 06, 19:17
Írta: 000000000 Dátum 2006 december 06, 19:17
Full gerjesztés (néma üzemmód)* - 4-5 (jumper pozíció). Persze nem lesz tök néma 8ahhoz tiszta DC kéne), de nagyon nagy mértékben csökken a hangja (és cserébe melegszik a motor+vezérlő).
A csatolás alatt nem értem pontosan mire gondolsz!
A csatolás alatt nem értem pontosan mire gondolsz!
Cím: Re:Léptetőmotor
Írta: tumnmsi57 Dátum 2006 december 06, 19:31
Írta: tumnmsi57 Dátum 2006 december 06, 19:31
Arra kis pontra atekercs végei mellett.
A conn.jpg-t nézd!
A conn.jpg-t nézd!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 06, 19:41
Írta: 000000000 Dátum 2006 december 06, 19:41
Hát de ezt nem lehet akárhogy összekötni (egyébként nem léptet a motor)!
Magyarul ez nem választható (csak egy helyes sorrend létezik)!
Magyarul ez nem választható (csak egy helyes sorrend létezik)!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2006 december 06, 19:53
Írta: bmejdz9nu Dátum 2006 december 06, 19:53
Megnéztem a német vezérlőmet... bipoláris, pedig azt hittem unipoláris...
Miért van "zenei" különbség a bipolár és unipolár között?
Egyik a magasatt játsza csipolva a másik meg a tenort berregve...
Nem értem. Motor motor... áram -áram. A hajtási elv majdnem uagyanaz...
Miért van "zenei" különbség a bipolár és unipolár között?
Egyik a magasatt játsza csipolva a másik meg a tenort berregve...
Nem értem. Motor motor... áram -áram. A hajtási elv majdnem uagyanaz...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 06, 22:46
Írta: 000000000 Dátum 2006 december 06, 22:46
Üdvözletem mindenkinek!
Lehet hogy hülyeséget kérdezek de mekkora fordulatszámra számíthatok H1-es vezérlővel és H1-es táppal a következő motoroknál?
NEMA léptetőmotor
23-as sorozat
1.4 A
1.96 V
1.8°
Köszönöm!!!
Lehet hogy hülyeséget kérdezek de mekkora fordulatszámra számíthatok H1-es vezérlővel és H1-es táppal a következő motoroknál?
NEMA léptetőmotor
23-as sorozat
1.4 A
1.96 V
1.8°
Köszönöm!!!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 07, 06:42
Írta: 000000000 Dátum 2006 december 07, 06:42
Hát, nagyon nem "majdnem" ugyan az!
Az unipolárisnál a tekercsek kikapcsolásakor (ha nincs fékező dióda), akkor MINDIG gyors legyengésű az áramkikapcsolása, ezért a hang MINDIG erősebb és magasabb frekvenciájú, mint a bipoláris (mixelt módú és így legtöbször lassú lecsengésű) hajtásnál (ott mélyebb a hang és sokkal halkabb).
A Profi2A esetén tök némák (alig hallani) a full gerjesztési áarmszabályzást, de ha ennél is jobban pihentetni akarom, akkor itt is visszább vetetem a frekit (ami így kicsit jobban halható)!
Egyébként az hogy hogyan szqabályzod (elv, értékek, extrák, stb.), az a konstruktőr hatásköre, így a "hangja" is!
Az unipolárisnál a tekercsek kikapcsolásakor (ha nincs fékező dióda), akkor MINDIG gyors legyengésű az áramkikapcsolása, ezért a hang MINDIG erősebb és magasabb frekvenciájú, mint a bipoláris (mixelt módú és így legtöbször lassú lecsengésű) hajtásnál (ott mélyebb a hang és sokkal halkabb).
A Profi2A esetén tök némák (alig hallani) a full gerjesztési áarmszabályzást, de ha ennél is jobban pihentetni akarom, akkor itt is visszább vetetem a frekit (ami így kicsit jobban halható)!
Egyébként az hogy hogyan szqabályzod (elv, értékek, extrák, stb.), az a konstruktőr hatásköre, így a "hangja" is!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 07, 06:44
Írta: 000000000 Dátum 2006 december 07, 06:44
Hello!
Hát ez erősen függ a trhelő nyomatékodtól és a motor alapnyomatékátol (üresen akár 5000 f/min is lehet, vagy még több, de terhelve olyan 1000-2000 1/min közé esik a használható nyomaték)!
Hát ez erősen függ a trhelő nyomatékodtól és a motor alapnyomatékátol (üresen akár 5000 f/min is lehet, vagy még több, de terhelve olyan 1000-2000 1/min közé esik a használható nyomaték)!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 07, 12:47
Írta: 000000000 Dátum 2006 december 07, 12:47
Köszönöm a választ!
Akkor valamit még állítgatnom kell mert a motorom 40-50 fordulat/percig szépen léptet de fölötte nem csinál semmit csak visít.
Mi lehet a gond? Azt a motortuningos részt nem teljesen értem. Átolvasom még egyszer és ha kérdésem van akkor még írok.
Akkor valamit még állítgatnom kell mert a motorom 40-50 fordulat/percig szépen léptet de fölötte nem csinál semmit csak visít.
Mi lehet a gond? Azt a motortuningos részt nem teljesen értem. Átolvasom még egyszer és ha kérdésem van akkor még írok.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 07, 12:54
Írta: 000000000 Dátum 2006 december 07, 12:54
Milyen vezérlőről van szó?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 07, 13:31
Írta: 000000000 Dátum 2006 december 07, 13:31
H1-es vezérlő H1-es táp
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 07, 13:47
Írta: 000000000 Dátum 2006 december 07, 13:47
Bocsánat már semmi gond csak én nem látok a szememtől!!!
Megvan nem volt kipipálva a Sherline 1/2 Pulse mode.
Megvan nem volt kipipálva a Sherline 1/2 Pulse mode.
Cím: Re:Léptetőmotor
Írta: Farkas Ádám Dátum 2006 december 07, 14:26
Írta: Farkas Ádám Dátum 2006 december 07, 14:26
összeköthetünk-e két-két motort párhuzamosan, vagy külön vezérlőt használjunk?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 07, 14:43
Írta: 000000000 Dátum 2006 december 07, 14:43
P1 esetén igen, H1 esetén nem javasolt!
H1 esetén felléphetnek motorrezonanciák amikor is a motorok egymást megzavarva össze-vissza ugrálhatnak egy bizonyos fordulatszámon (párhuzamos kötésnél)!
Itt a fórumon femerült az egyik kollegában az, hogy esetleg meg kellene próbálni a 2 motort nem párhuzamosan kötni, hanem sorosan (8 kivezetéses motoroknál ez megoldható). ezt még nem teszteltük és lehet, hogy ilyenkor nem lép fel rezonancia, viszont vélhetően romlik a tuningolhatósága (mivel 2× annyi lesz az eredő induktivitás ás motor alapfeszültség).
Ez kölcség hatékony megoldás lehet!
A legtisztább külön-külön vezérlővel hajtatni minden motort és szoftveresen összefogatni őket.
H1 esetén felléphetnek motorrezonanciák amikor is a motorok egymást megzavarva össze-vissza ugrálhatnak egy bizonyos fordulatszámon (párhuzamos kötésnél)!
Itt a fórumon femerült az egyik kollegában az, hogy esetleg meg kellene próbálni a 2 motort nem párhuzamosan kötni, hanem sorosan (8 kivezetéses motoroknál ez megoldható). ezt még nem teszteltük és lehet, hogy ilyenkor nem lép fel rezonancia, viszont vélhetően romlik a tuningolhatósága (mivel 2× annyi lesz az eredő induktivitás ás motor alapfeszültség).
Ez kölcség hatékony megoldás lehet!
A legtisztább külön-külön vezérlővel hajtatni minden motort és szoftveresen összefogatni őket.
Cím: Re:Léptetőmotor
Írta: tumnmsi57 Dátum 2006 december 07, 19:46
Írta: tumnmsi57 Dátum 2006 december 07, 19:46
Bekötöttem különféle képpen, cserélgettem a tekercsvégeket, de léptetet mindig. és álló helyzetben mindig mintha a moci 2 léptetési szöge között rezgett volna. Már FET-hibára gyanakszom. Menyire ESD érzékeny a FET???? Vagy Mach beállítás??
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 07, 20:00
Írta: 000000000 Dátum 2006 december 07, 20:00
Mi az , hogy "léptet"? Rosszol forog (ugrál), vagy magátol léptet folyamatosan?
Cím: Re:Léptetőmotor
Írta: tumnmsi57 Dátum 2006 december 07, 20:00
Írta: tumnmsi57 Dátum 2006 december 07, 20:00
Tudna valaki infót adni arról, hogy kb. a szervómotorok nyomatékát a léptetőmotorokéval miként lehet összevetni
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 07, 20:35
Írta: 000000000 Dátum 2006 december 07, 20:35
Szia Fraser!
Egy szervomotornál a nyomaték az áramerőséggel
egyenesen arányos, és a tartós vagy névleges
nyomatékának a 10-20 szorosát is rövid ideig
leadhatja. Ezt a teljes fordulatszám
tartományára igaz, azaz pl. 6000 1/min maximum
esetén is.
Üdv.:Tibor45
Egy szervomotornál a nyomaték az áramerőséggel
egyenesen arányos, és a tartós vagy névleges
nyomatékának a 10-20 szorosát is rövid ideig
leadhatja. Ezt a teljes fordulatszám
tartományára igaz, azaz pl. 6000 1/min maximum
esetén is.
Üdv.:Tibor45
Cím: Re:Léptetőmotor
Írta: tumnmsi57 Dátum 2006 december 07, 20:54
Írta: tumnmsi57 Dátum 2006 december 07, 20:54
Összekötöttem a rajzon (lentebbi link) megjejölt 2szímű vezetékeket párosával. A 8 huzalból csináltam 6-ot. Bekötöttem a H1 egyi 6polúsú kimenetére (2x3). középre a közösített kétszínűeket, szélre az egyszínűeket. Próbálom a mach-el és léptet, növelem a sebességet és forog, de álló helyzetben rángat.
Felcserélem az egyszínű vezetékeket mind a 4 variációba, de ugyanez. Van léptetés de rángat. A rángatás nem folyamatos, véletlenszerű. Néha megállás után még ugrik egy-kettőt, vagy billeg a két klépés között.
Ezért kérdeztem, hogy van-e köze a csatolásnak a léptetéshez.
Kösz a válasz előre is
Felcserélem az egyszínű vezetékeket mind a 4 variációba, de ugyanez. Van léptetés de rángat. A rángatás nem folyamatos, véletlenszerű. Néha megállás után még ugrik egy-kettőt, vagy billeg a két klépés között.
Ezért kérdeztem, hogy van-e köze a csatolásnak a léptetéshez.
Kösz a válasz előre is
Cím: Re:Léptetőmotor
Írta: tumnmsi57 Dátum 2006 december 07, 21:55
Írta: tumnmsi57 Dátum 2006 december 07, 21:55
levettem a néma üzemmódot és a rángatózás megszünt, viszont az egy-két lépéses továbblépés rlőfordul néha. Valamit még finomítani kell.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 08, 06:45
Írta: 000000000 Dátum 2006 december 08, 06:45
Nem szabad neki rángatni soha! Húzd le az LPT-t, akkor is rángat?
Kitt v. készre szerelt vezéelő?
Kitt v. készre szerelt vezéelő?
Cím: Re:Léptetőmotor
Írta: tumnmsi57 Dátum 2006 december 08, 16:42
Írta: tumnmsi57 Dátum 2006 december 08, 16:42
Igen, de akkor is, de csak a néma üzemmódban. A többi ok.
A túlléptetést valószínüleg a "made in china" billentyűzet okozza. Szédszettem, full mechanikus, lehet hogy van pergés a gomb elegedésekor?
A túlléptetést valószínüleg a "made in china" billentyűzet okozza. Szédszettem, full mechanikus, lehet hogy van pergés a gomb elegedésekor?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 08, 19:23
Írta: 000000000 Dátum 2006 december 08, 19:23
Az sem jó!!! kitt, vagy komplett?!
Cím: Re:Léptetőmotor
Írta: eivmhrm04 Dátum 2006 december 08, 21:42
Írta: eivmhrm04 Dátum 2006 december 08, 21:42
Na most legyen valaki okos.Gépépitésre szántam én is el magam.Az alaprámám már meg is van 80/130cm a külső méret.De eredetileg léptető motrokkal akartam megcsinálni van is 1 drb m343-11 5.5 A 2.8V /5.5kg
1drb sanyo 3.1A 2.6V 1.2kg
1drb sigma 3,5A 1,5kg USA
Viszont ma szereztem
AC servomotor SGM-02A312 200V 200W 2A 2drb
SGM-02A312 200V 400W2.6A 1drb
Ezek japán motrok.Most nemtudom mit válasszak szervo vagy léptető?Nem tudom a szervokhoz hogyan lehetne megoldani a vezérléstEzek a szervók golyósorsókkal komplett vannak,igaz nekem rövidek lesznek mert csak 46/56/42/64/43cm hosszúak.Csak 1 drb ot tudok majd felhasználni az 5 ből,persze ezek kmplett tokkal vonóval vannak.Segitsen már valaki hogy hogyan döntsek????????????
1drb sanyo 3.1A 2.6V 1.2kg
1drb sigma 3,5A 1,5kg USA
Viszont ma szereztem
AC servomotor SGM-02A312 200V 200W 2A 2drb
SGM-02A312 200V 400W2.6A 1drb
Ezek japán motrok.Most nemtudom mit válasszak szervo vagy léptető?Nem tudom a szervokhoz hogyan lehetne megoldani a vezérléstEzek a szervók golyósorsókkal komplett vannak,igaz nekem rövidek lesznek mert csak 46/56/42/64/43cm hosszúak.Csak 1 drb ot tudok majd felhasználni az 5 ből,persze ezek kmplett tokkal vonóval vannak.Segitsen már valaki hogy hogyan döntsek????????????
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2006 december 08, 21:54
Írta: e3h0cv4ph Dátum 2006 december 08, 21:54
Karcsi finomítani kellene a részleteket, például, hogy milyen sebességet akarsz elérni, mit akarsz megmunkálni (fémet vagy csak hungarocellt), aztán mennyi pénzt szánsz a hajtás elektronikájára, milyen lehetőségeid vannak (pl.: van a polcon még 3db H1-es vezérlő) stb... ?
Cím: Re:Léptetőmotor
Írta: eivmhrm04 Dátum 2006 december 08, 22:25
Írta: eivmhrm04 Dátum 2006 december 08, 22:25
Vezérlőm még nincsen semilyen sem.Gránitba fába gondolkodom.Mibe kerülhet ma a szervómotorokhoz a vezérlés?
Nem tudom hohy ezeket már nem kell redukálni?Mert igy nagyon kicsi lenne a felbontás szerintem.
Nem tudom hohy ezeket már nem kell redukálni?Mert igy nagyon kicsi lenne a felbontás szerintem.
Cím: Re:Léptetőmotor
Írta: eivmhrm04 Dátum 2006 december 08, 22:26
Írta: eivmhrm04 Dátum 2006 december 08, 22:26
Azért szeretnék vlaki okosabbtól tanácsot kérni
Cím: Re:Léptetőmotor
Írta: 9v9rb6gau Dátum 2006 december 08, 22:29
Írta: 9v9rb6gau Dátum 2006 december 08, 22:29
Újonnan 1000$/db nagyságrendben van. Áttételezni biztosan kell!
Cím: Re:Léptetőmotor
Írta: eivmhrm04 Dátum 2006 december 08, 22:39
Írta: eivmhrm04 Dátum 2006 december 08, 22:39
van három darab,de volt több is csak már bezúzták[#alien][#alien]
Cím: Re:Léptetőmotor
Írta: eivmhrm04 Dátum 2006 december 08, 22:42
Írta: eivmhrm04 Dátum 2006 december 08, 22:42
majd holnap teszek fel képeket róla,ha tudok.De ezek komplett vannak felfogatással és nincsennek áttételezve
Cím: Re:Léptetőmotor
Írta: ki005gz70 Dátum 2006 december 09, 18:33
Írta: ki005gz70 Dátum 2006 december 09, 18:33
Sziasztok !
Olyan problémám van hogy szeretném a tengely sebességét megnövelni. Úgy gondoltam hogy egy jó erős dc-motorral rásegítek a léptetőmotorra. Az a lényeg hogy a dc ne legyen erősebb a léptetőmotornél, tehát max 99% legyen a dc a léptető motor nyomatékának, így 1.99-szeres gyorsaságot érnék el.
Ezt egy 12v-os akkus-fúrógépból szerzett motorral oldonám meg de az a baj hogy nemhogy 12v, de még 5v-al is marha nagy nyomatéka ,és fordulatszáma van. Ezt szeretném szabályozni fet-el, de az a baj hogy vagy 5 fet-et elfüstöltem akkora áramot vesz fel az 5v-on.
A kérdésem : Milyen fet-et használjak ???????????????????
A gépem amúgy itt van: http://mastergy.fw.hu/cnc
és a munkáim : http://disztukorkep.fw.hu
Segítsetek kérlek !
Üdv:
Gyula
Olyan problémám van hogy szeretném a tengely sebességét megnövelni. Úgy gondoltam hogy egy jó erős dc-motorral rásegítek a léptetőmotorra. Az a lényeg hogy a dc ne legyen erősebb a léptetőmotornél, tehát max 99% legyen a dc a léptető motor nyomatékának, így 1.99-szeres gyorsaságot érnék el.
Ezt egy 12v-os akkus-fúrógépból szerzett motorral oldonám meg de az a baj hogy nemhogy 12v, de még 5v-al is marha nagy nyomatéka ,és fordulatszáma van. Ezt szeretném szabályozni fet-el, de az a baj hogy vagy 5 fet-et elfüstöltem akkora áramot vesz fel az 5v-on.
A kérdésem : Milyen fet-et használjak ???????????????????
A gépem amúgy itt van: http://mastergy.fw.hu/cnc
és a munkáim : http://disztukorkep.fw.hu
Segítsetek kérlek !
Üdv:
Gyula
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2006 december 10, 10:18
Írta: e3h0cv4ph Dátum 2006 december 10, 10:18
Hello MasterGy! Ezen én is gondolkodtam korábban, de sok problémát felvet a dolog, bár ha találnánk rá egy jó megoldást az engem is érdekelne mert az én léptetőmotorom is gyenge a mechanikámhoz.
1. Azt nem értem, hogy miért kell gyengébbnek lennie a DC motornak, ha PWM-be vezérled és nincs maxon a motor akkor úgy is "gyengébb". Ráadásul elég nehéz összehasonlítani egy DC motor és egy léptetőmotor "erősségét", mer ugye a kérdés az, hogy milyen sebességen tennénk ezt meg?
2. A nagy kérdés az, hogy mi alapján vezérelnéd a DC motort? És milyen szabályozást használnánk, mert ugye az "igazi" gépekben PID szabályzást használnak, és ha meg már itt tartunk akkor túlbonyolítottuk a dolgot.
3. Szerintem a probléma a lassításnál van a léptetőmotor nem lesz képes megfogni a rendszert, mert van a mechanika lendülete és a DC is teker, akkor szegény léptecs hibázni fog (szerintem).
Nagyon össze kéne hangolni a rendszert, és emiatt túl bonyolúlt lenne. Nem csoda ha az iparban ezt a megoldást nem használják (az én tudomásom szerint).
Szerintem a megoldás sima szervó szabályozás egy jó erős motorral.
Ha mégis vannak ötleteid írjad meg mert engem is érdekel (megvitatjuk).
A FET-re visszatérve nekem van egy jó FET-em. IRLBA 380P (Ids=179A Uds=30V Rds(on)=0,005ohm), ezt házi körülmények között "nem tudod" tönkre tenni, előbb leég a trafód. (mielőtt valaki belekötne - tudom, hogy mindent tönkre lehet tenni). Van ebből több is, esetleg tudok adni.
Üdv.
1. Azt nem értem, hogy miért kell gyengébbnek lennie a DC motornak, ha PWM-be vezérled és nincs maxon a motor akkor úgy is "gyengébb". Ráadásul elég nehéz összehasonlítani egy DC motor és egy léptetőmotor "erősségét", mer ugye a kérdés az, hogy milyen sebességen tennénk ezt meg?
2. A nagy kérdés az, hogy mi alapján vezérelnéd a DC motort? És milyen szabályozást használnánk, mert ugye az "igazi" gépekben PID szabályzást használnak, és ha meg már itt tartunk akkor túlbonyolítottuk a dolgot.
3. Szerintem a probléma a lassításnál van a léptetőmotor nem lesz képes megfogni a rendszert, mert van a mechanika lendülete és a DC is teker, akkor szegény léptecs hibázni fog (szerintem).
Nagyon össze kéne hangolni a rendszert, és emiatt túl bonyolúlt lenne. Nem csoda ha az iparban ezt a megoldást nem használják (az én tudomásom szerint).
Szerintem a megoldás sima szervó szabályozás egy jó erős motorral.
Ha mégis vannak ötleteid írjad meg mert engem is érdekel (megvitatjuk).
A FET-re visszatérve nekem van egy jó FET-em. IRLBA 380P (Ids=179A Uds=30V Rds(on)=0,005ohm), ezt házi körülmények között "nem tudod" tönkre tenni, előbb leég a trafód. (mielőtt valaki belekötne - tudom, hogy mindent tönkre lehet tenni). Van ebből több is, esetleg tudok adni.
Üdv.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 10, 11:23
Írta: 000000000 Dátum 2006 december 10, 11:23
Üdvözlöm a Tudós társaságot!
Az lenne a kérdésem hozzátok mint gyakorlott léptetőmotor nyűvőkhöz, hogy szerintetek állórészt újratekerni érdemes-e, lehet-e és ha igen akkor hol tudtok ilyen helyet.
Üdv: Gábor
Az lenne a kérdésem hozzátok mint gyakorlott léptetőmotor nyűvőkhöz, hogy szerintetek állórészt újratekerni érdemes-e, lehet-e és ha igen akkor hol tudtok ilyen helyet.
Üdv: Gábor
Cím: Re:Léptetőmotor
Írta: Kicsa Dátum 2006 december 10, 12:01
Írta: Kicsa Dátum 2006 december 10, 12:01
Szevasztok!
Japan Servo miniatűr léptetőmotor. ilyen létezik? :-) most akkor ez ervo v léptetőmotor? Amúgy annyit tudok még róla hogy 0.9 fok/lépés...szerintetek ilyet lehetne használni x-y vezérléshez?
Japan Servo miniatűr léptetőmotor. ilyen létezik? :-) most akkor ez ervo v léptetőmotor? Amúgy annyit tudok még róla hogy 0.9 fok/lépés...szerintetek ilyet lehetne használni x-y vezérléshez?
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2006 december 10, 12:27
Írta: s5f8tmfv3 Dátum 2006 december 10, 12:27
Szerintem léptetőmotor lesz az, a gyártója pedig a Japan Servo. Hogy tudod-e használni az leginkább a motor nyomatékától és az igényeidtől függ.
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2006 december 10, 14:35
Írta: e3h0cv4ph Dátum 2006 december 10, 14:35
Hány drót jön ki belőle, és milyen színüek?
Egy hejről jön ki vagy két külön részből?
Egy hejről jön ki vagy két külön részből?
Cím: Re:Léptetőmotor
Írta: 9v9rb6gau Dátum 2006 december 10, 14:47
Írta: 9v9rb6gau Dátum 2006 december 10, 14:47
Simán! Csak a szétszedéskor vigyázz, nehogy a forgórész lemágneseződjön!
Cím: Re:Léptetőmotor
Írta: ki005gz70 Dátum 2006 december 10, 14:52
Írta: ki005gz70 Dátum 2006 december 10, 14:52
Szia Tatai !
Nem tudom megnézted-e a cnc-gépemet http://mastergy.fw.hu/cnc. Azért kérdem mert nekem nem lenne nagy nehézség összehangolni a dc-motort a léptetővel, mert semmilyen pwm szabályzó, meg semmilyen step/dir vezérlő nincs ! A léptetőmotorok fet-jei ugy ahogy van rá van kötve a számítógép nyomtatóportjának a kimeneteire. Innen szabályzom. Tehát magát a programot is én írtam hozzá, igazából bármibe bele tudok nyulni könnyedén. Nembeszélve hogy a léptetőmotornak egyszerre 2 tekercsét hajtom, kis trükkel. Ez is le van írva az oldalon. Szal egy szó mint száz így könnyedén összhangba lehet hozni a rendszert.
Ha sikerül, majd fogok írni minden paramétert hátha hasznát tudod venni az ötletnek, bár nekem fogalmam sincs hogy a dc motort hogyan lehetne összehangolni a p1 vezérlővel....,vagy bármilyen cnc-vezérlő elektronikával.
És milyen árban tudnád elküldeni a fetet ? Igazából 4 egyforma izom-fet kellene egy polaritásváltós kapcsolási rajzom szerint.Hány darabot tudnál küldeni, és mennyiért ?
Postai utánvétellel megoldható ?
Üdvöztettel:
MasterGy
Nem tudom megnézted-e a cnc-gépemet http://mastergy.fw.hu/cnc. Azért kérdem mert nekem nem lenne nagy nehézség összehangolni a dc-motort a léptetővel, mert semmilyen pwm szabályzó, meg semmilyen step/dir vezérlő nincs ! A léptetőmotorok fet-jei ugy ahogy van rá van kötve a számítógép nyomtatóportjának a kimeneteire. Innen szabályzom. Tehát magát a programot is én írtam hozzá, igazából bármibe bele tudok nyulni könnyedén. Nembeszélve hogy a léptetőmotornak egyszerre 2 tekercsét hajtom, kis trükkel. Ez is le van írva az oldalon. Szal egy szó mint száz így könnyedén összhangba lehet hozni a rendszert.
Ha sikerül, majd fogok írni minden paramétert hátha hasznát tudod venni az ötletnek, bár nekem fogalmam sincs hogy a dc motort hogyan lehetne összehangolni a p1 vezérlővel....,vagy bármilyen cnc-vezérlő elektronikával.
És milyen árban tudnád elküldeni a fetet ? Igazából 4 egyforma izom-fet kellene egy polaritásváltós kapcsolási rajzom szerint.Hány darabot tudnál küldeni, és mennyiért ?
Postai utánvétellel megoldható ?
Üdvöztettel:
MasterGy
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 10, 15:27
Írta: 000000000 Dátum 2006 december 10, 15:27
Szerinted egy mezei "aszinkron motortekercselő" meg tudja tekerni a menetsűrüség miatt? (Sanyo-Denki 57-es)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 10, 15:29
Írta: 000000000 Dátum 2006 december 10, 15:29
Szia Mastergy!
Amit te szeretnél megvalósítani, az nem olyan egyszerű, mint ahogyan elképzelted.
A DC motor meghajtásához 4 darab mosfetre lesz szükséged, ha mindkét irányba szeretnéd mozgatni a motort. H-hídba kell kapcsolni a fet-eket. A felső oldaliak P, az alsó oldaliak N csatornásak kell hogy legyenek, ha 4 darab N csatornást szeretnél használni, ahhoz spéci mosfet meghajtó kellene, szerintem a 2xN és 2xP csatornás használata egyszerűbb.
N:IRL540
P:IRL9540
Azért mielőtt belevágsz, picit el kellene gondolkodni azon, hogy hogyan fogod összehangolni a léptetőmotor és a DC motor sebességét???
Ez nem egy egyszerű feladat, erre PID szabályzást, vagy fuzzy logikát szoktak alkalmazni, egyik sem túl egyszerű :(
Amit te szeretnél megvalósítani, az nem olyan egyszerű, mint ahogyan elképzelted.
A DC motor meghajtásához 4 darab mosfetre lesz szükséged, ha mindkét irányba szeretnéd mozgatni a motort. H-hídba kell kapcsolni a fet-eket. A felső oldaliak P, az alsó oldaliak N csatornásak kell hogy legyenek, ha 4 darab N csatornást szeretnél használni, ahhoz spéci mosfet meghajtó kellene, szerintem a 2xN és 2xP csatornás használata egyszerűbb.
N:IRL540
P:IRL9540
Azért mielőtt belevágsz, picit el kellene gondolkodni azon, hogy hogyan fogod összehangolni a léptetőmotor és a DC motor sebességét???
Ez nem egy egyszerű feladat, erre PID szabályzást, vagy fuzzy logikát szoktak alkalmazni, egyik sem túl egyszerű :(
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 10, 16:10
Írta: 000000000 Dátum 2006 december 10, 16:10
Szia MasterGy!
Hogy egészen egyszerűen fogalmazzak,
ilyen vegyes dolgok nem igazán fognak
együttműködni.
Egy DC motor egészen más fizikai paraméterekkel
rendelkezik, mint a léptető. És mint mindenben az életben itt is igaz, elindulni és megállni
a probléma, csak úgy állandó sebességgel menni a legkisebb feladat. Ezt a szinkront nem tudod
összehozni, hiszen ha csak egy dolgot nézünk:
szinte kizárt, hogy azonos időállandója legyen
a két motornak. Ahhoz pedig a jelenlegi
számítástechnikai megoldásod kapacitása
egyébként sem elég, hogy szoftverben PID
algoritmusokkal is foglalkozzál.
Inkább tegyél fel egy jobb M-n görbéjű step
motort, és akkor nagyobb lesz a sebességed.
Ha pedig ez sem elég, alkalmazz szervót.
Üdv.: Tibor45
Hogy egészen egyszerűen fogalmazzak,
ilyen vegyes dolgok nem igazán fognak
együttműködni.
Egy DC motor egészen más fizikai paraméterekkel
rendelkezik, mint a léptető. És mint mindenben az életben itt is igaz, elindulni és megállni
a probléma, csak úgy állandó sebességgel menni a legkisebb feladat. Ezt a szinkront nem tudod
összehozni, hiszen ha csak egy dolgot nézünk:
szinte kizárt, hogy azonos időállandója legyen
a két motornak. Ahhoz pedig a jelenlegi
számítástechnikai megoldásod kapacitása
egyébként sem elég, hogy szoftverben PID
algoritmusokkal is foglalkozzál.
Inkább tegyél fel egy jobb M-n görbéjű step
motort, és akkor nagyobb lesz a sebességed.
Ha pedig ez sem elég, alkalmazz szervót.
Üdv.: Tibor45
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2006 december 10, 17:55
Írta: e3h0cv4ph Dátum 2006 december 10, 17:55
Szia MaszterGy!
Hova valósi vagy? Egy személyes találka belefér?
Négy fetet tudok adni ingyen is, de ha postán küldeném azt neked kéne fizetni.
Van jó H-hidas rajzom (csak N-esekkel)mert ez a fet is az. Ha kell el tudom küldeni.
Üdv: Tatai
Hova valósi vagy? Egy személyes találka belefér?
Négy fetet tudok adni ingyen is, de ha postán küldeném azt neked kéne fizetni.
Van jó H-hidas rajzom (csak N-esekkel)mert ez a fet is az. Ha kell el tudom küldeni.
Üdv: Tatai
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2006 december 10, 17:56
Írta: e3h0cv4ph Dátum 2006 december 10, 17:56
Ja bocs, én Szombathelyi vagyok.
Cím: Re:Léptetőmotor
Írta: ki005gz70 Dátum 2006 december 10, 19:18
Írta: ki005gz70 Dátum 2006 december 10, 19:18
Sziasztok !
Mint mondtam, én vezérlem a léptetőmotorokat programból.Tehát én írom meg a programban hogy most kapcsolja be az egyik tekercset, aztán a másikat, vagy akár mindet egyszerre ha akarom. Tehát mondhatni "tüzközelben" vagyok a problémák megoldásához. Egész egyszerűen képzeljétek el hogy bekapcsolom a léptetőmotor egyik tekercsét ! Addig állítom egy tilisztorral a dc motor nyomatékát, hogy ne tudja kimozdítani a léptetőmotort, miközben az féken tartja a tengelyt !!!!! Na ! Esetleg egy kicsit ettől a ponttol is lentebb tekerem még a tilisztort.
Ha ez megvan, akkor a programban a tengelyeket vezérlő algoritmusba ágyazom bele az új értékeket. Igazából így van most megoldva ez a része:
-A érték a két lépés közötti időt jelenti pl 100
-B érték a felgyorsulás/lassulás mértéke ,mely arányos a fenti értékkel. pl 70
Eddig ok ? Tehát lépésenként eltelt 100 időegységről gyorsít 70-re.
-C érték az, hogy a B értéket mennyi lépés alatt érje el. pl ha 50, akkor 50 lépés alatt fog két lépés közötti időegység 100-ról 70-re csökkeni lineárisan
Csak szemléltetni akartam hogy figyelek a részletekre, és ezzel a dc-rásegítős dologgal tudom mit csinálok.
És ha a dc motor nyomatékot sikerül bekalibrálnom a legfent leirtak alapján, akkor
mind az A,B,C értékét csökkenthetem. Az is lehet hogy ezzel a módszerrel nem érek el többet csak mittom 20%-os sebességnövekedést, de már kkor is megérte. De az én elgondolásom szerint, ha a Jó Isten is úgy akarja, akkor max 95%, de legalább egy kb 80% -ak gyorsabb lesz.
Amúgy Szolnokról írok, személyes taliba is benne lennék, de nagy a táv :(
A fet-eket nem kérném ingyen !
Nagyon jó ha tudsz segíteni nekem ! :)
Rajzom nekem is van, de azért a tiédre is kiváncsi vagyok !
Üdvözlettel:
MasterGy
Mint mondtam, én vezérlem a léptetőmotorokat programból.Tehát én írom meg a programban hogy most kapcsolja be az egyik tekercset, aztán a másikat, vagy akár mindet egyszerre ha akarom. Tehát mondhatni "tüzközelben" vagyok a problémák megoldásához. Egész egyszerűen képzeljétek el hogy bekapcsolom a léptetőmotor egyik tekercsét ! Addig állítom egy tilisztorral a dc motor nyomatékát, hogy ne tudja kimozdítani a léptetőmotort, miközben az féken tartja a tengelyt !!!!! Na ! Esetleg egy kicsit ettől a ponttol is lentebb tekerem még a tilisztort.
Ha ez megvan, akkor a programban a tengelyeket vezérlő algoritmusba ágyazom bele az új értékeket. Igazából így van most megoldva ez a része:
-A érték a két lépés közötti időt jelenti pl 100
-B érték a felgyorsulás/lassulás mértéke ,mely arányos a fenti értékkel. pl 70
Eddig ok ? Tehát lépésenként eltelt 100 időegységről gyorsít 70-re.
-C érték az, hogy a B értéket mennyi lépés alatt érje el. pl ha 50, akkor 50 lépés alatt fog két lépés közötti időegység 100-ról 70-re csökkeni lineárisan
Csak szemléltetni akartam hogy figyelek a részletekre, és ezzel a dc-rásegítős dologgal tudom mit csinálok.
És ha a dc motor nyomatékot sikerül bekalibrálnom a legfent leirtak alapján, akkor
mind az A,B,C értékét csökkenthetem. Az is lehet hogy ezzel a módszerrel nem érek el többet csak mittom 20%-os sebességnövekedést, de már kkor is megérte. De az én elgondolásom szerint, ha a Jó Isten is úgy akarja, akkor max 95%, de legalább egy kb 80% -ak gyorsabb lesz.
Amúgy Szolnokról írok, személyes taliba is benne lennék, de nagy a táv :(
A fet-eket nem kérném ingyen !
Nagyon jó ha tudsz segíteni nekem ! :)
Rajzom nekem is van, de azért a tiédre is kiváncsi vagyok !
Üdvözlettel:
MasterGy
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 10, 20:47
Írta: 000000000 Dátum 2006 december 10, 20:47
Szia MasterGy!
Értem én, hogy mit akarsz, szerintem a többiek is. Csak nem hiszek benne, hogy ez így megvalósítható. Persze lehet kisérletezni, hátha bejön.
A FET diszkrét áramköri elem, vagyis vagy be van kapcsolva, vagy nincs. Analog módon nem lehet vele vezérelni a motort, csak PWM-el.
Értem én, hogy mit akarsz, szerintem a többiek is. Csak nem hiszek benne, hogy ez így megvalósítható. Persze lehet kisérletezni, hátha bejön.
A FET diszkrét áramköri elem, vagyis vagy be van kapcsolva, vagy nincs. Analog módon nem lehet vele vezérelni a motort, csak PWM-el.
Cím: Re:Léptetőmotor
Írta: ki005gz70 Dátum 2006 december 11, 08:34
Írta: ki005gz70 Dátum 2006 december 11, 08:34
Szia Tyutyi !
Hú ez az amit nem tudtam ! Hiába kisérleteztem a fet-jeimmel ellenállásokkal, csak vagy ki, vagy bekapcsolt amikor elért a tilisztor egy pontot. Akkor ez a baj. Akkor nekem valószínűleg nekem nem fet kell hanem olyan tranzisztor ami a kis vezérlőjellel arányosan hajtja a motort. És ugye ebből pnp, meg npn változat a polaritás váltásához.
Vagy nemtom. :)
Van ötletetek ? Tudtok segíteni ?
Hú ez az amit nem tudtam ! Hiába kisérleteztem a fet-jeimmel ellenállásokkal, csak vagy ki, vagy bekapcsolt amikor elért a tilisztor egy pontot. Akkor ez a baj. Akkor nekem valószínűleg nekem nem fet kell hanem olyan tranzisztor ami a kis vezérlőjellel arányosan hajtja a motort. És ugye ebből pnp, meg npn változat a polaritás váltásához.
Vagy nemtom. :)
Van ötletetek ? Tudtok segíteni ?
Cím: Re:Léptetőmotor
Írta: ki005gz70 Dátum 2006 december 11, 08:35
Írta: ki005gz70 Dátum 2006 december 11, 08:35
Plusz még hogy birjon olyan 10A-t....
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2006 december 11, 13:28
Írta: e3h0cv4ph Dátum 2006 december 11, 13:28
Hello MasterGy.
1. Van ilyen tranzisztor amit te keresel, de jobb a PWM vezérlés, és az mehet FET-el is. Kisebb a disszipáció és a félvezető melegedése is.
2. Én is értem, hogy hogyan akarod a motorokat összehozde, de nehezen akarom elhinni, hogy ez így jó lesz (nem kizárt).
Amit léírtál a nyomaték beállítással az jónak tűnik, de vegyük figyelembe, hogy ezt a léptetőmotor álló helyzeténél teszed meg (álló helyzetben ezzel nincs is gond), de tudjuk, hogy a léptetőmotor a sebessége növelésével erősen veszít a nyomatékából (főleg ebben a vezérlési módban). Tehát gyorsan forgó motornál a DC motornak nagyobb lesz a nyomatéka mint a léptetőé. Amennyiben nem precizen egy sebességgel mennek (ezt nagyon pontosan kellene tartaniuk) a két motor egymás ellen dolgozhat, ami lépésvesztéshez vezet.
3. Azt írtan, hogy a fet-eket nem kéred ingyen, én nem akarom ezeket pénzért árulni, gondolkozzunk cserekereskedelembe. Mi az amiből neked sok van? Mit tudnál felajánlani cserébe?
Üdv: TT
1. Van ilyen tranzisztor amit te keresel, de jobb a PWM vezérlés, és az mehet FET-el is. Kisebb a disszipáció és a félvezető melegedése is.
2. Én is értem, hogy hogyan akarod a motorokat összehozde, de nehezen akarom elhinni, hogy ez így jó lesz (nem kizárt).
Amit léírtál a nyomaték beállítással az jónak tűnik, de vegyük figyelembe, hogy ezt a léptetőmotor álló helyzeténél teszed meg (álló helyzetben ezzel nincs is gond), de tudjuk, hogy a léptetőmotor a sebessége növelésével erősen veszít a nyomatékából (főleg ebben a vezérlési módban). Tehát gyorsan forgó motornál a DC motornak nagyobb lesz a nyomatéka mint a léptetőé. Amennyiben nem precizen egy sebességgel mennek (ezt nagyon pontosan kellene tartaniuk) a két motor egymás ellen dolgozhat, ami lépésvesztéshez vezet.
3. Azt írtan, hogy a fet-eket nem kéred ingyen, én nem akarom ezeket pénzért árulni, gondolkozzunk cserekereskedelembe. Mi az amiből neked sok van? Mit tudnál felajánlani cserébe?
Üdv: TT
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 11, 14:21
Írta: 000000000 Dátum 2006 december 11, 14:21
Szia Mastergy!
Analog módon bipoláris tranzisztorokkal tudsz vezérelni. Az N csatornás megfelelője az NPN, a P csatornás megfelelője a PNP. Ezeknél a bázisra kapcsolt feszültséggel tudod szabályozni, hogy mennyire nyisson ki...
De ha bip. tranzisztorokat használsz, akkor ne felejtsd ki a kapcsolásból fordított diódákat, amik megvédik a tranzisztort a visszáramtól, ami a tekercsben keletkezik a tranzisztor kikapcsolásakor. A FET-ekbe általában bele van integrálva ez a dióda, míg a tranzisztorokból hiányzik. Induktív fogyasztók meghajtásánál mindenképp szükséges, ha nem akarod, hogy füstöljön a tranzisztor...
Analog módon bipoláris tranzisztorokkal tudsz vezérelni. Az N csatornás megfelelője az NPN, a P csatornás megfelelője a PNP. Ezeknél a bázisra kapcsolt feszültséggel tudod szabályozni, hogy mennyire nyisson ki...
De ha bip. tranzisztorokat használsz, akkor ne felejtsd ki a kapcsolásból fordított diódákat, amik megvédik a tranzisztort a visszáramtól, ami a tekercsben keletkezik a tranzisztor kikapcsolásakor. A FET-ekbe általában bele van integrálva ez a dióda, míg a tranzisztorokból hiányzik. Induktív fogyasztók meghajtásánál mindenképp szükséges, ha nem akarod, hogy füstöljön a tranzisztor...
Cím: Re:Léptetőmotor
Írta: ki005gz70 Dátum 2006 december 11, 14:47
Írta: ki005gz70 Dátum 2006 december 11, 14:47
Sziasztok !
irlz24n fet ből van sok nekem,mivel a magi-féle vezérlő alapján építettem a motorhajtást , és legalább 5000 Ft értékben kellett rendelnem egy oldalról, így abból rendeltem egy csomót.
Olyat tudok esetleg árúba bocsájtani.. :)
Bár gondolkodok erősen hogy párhuzamba kötök van 3-4 ilyet, és akkor impulzus szerűen hajtom vele a dc motort a programból. Kipróbálom ezt a verziót ma este, megnézem mennyire melegszik, össze lehet-e így hangolni a dolgokat. Egyenlőre csak egy irányba működne, de ha műxik ,akkor így csinálom meg a hidas-polaritás cserélő megoldást. Ha nem, akkor beszélhetünk azokról a tranzisztorokról ! :) Ha nem kell irlz24n akkor képletes összegért utánvétellen is el lehetne küldeni, de először utánajárok hogy milyen elektronika kellhet egy ilyenhez, meg hogy diódákat is bekötni visszáram ellen, ahogy tatai mondta.
irlz24n fet ből van sok nekem,mivel a magi-féle vezérlő alapján építettem a motorhajtást , és legalább 5000 Ft értékben kellett rendelnem egy oldalról, így abból rendeltem egy csomót.
Olyat tudok esetleg árúba bocsájtani.. :)
Bár gondolkodok erősen hogy párhuzamba kötök van 3-4 ilyet, és akkor impulzus szerűen hajtom vele a dc motort a programból. Kipróbálom ezt a verziót ma este, megnézem mennyire melegszik, össze lehet-e így hangolni a dolgokat. Egyenlőre csak egy irányba működne, de ha műxik ,akkor így csinálom meg a hidas-polaritás cserélő megoldást. Ha nem, akkor beszélhetünk azokról a tranzisztorokról ! :) Ha nem kell irlz24n akkor képletes összegért utánvétellen is el lehetne küldeni, de először utánajárok hogy milyen elektronika kellhet egy ilyenhez, meg hogy diódákat is bekötni visszáram ellen, ahogy tatai mondta.
Cím: Re:Léptetőmotor
Írta: ki005gz70 Dátum 2006 december 11, 14:49
Írta: ki005gz70 Dátum 2006 december 11, 14:49
Ja, bocsánat ! Utolsó monmdat helyesbítve !
"....ahogy Tyutyi mondta" :)
"....ahogy Tyutyi mondta" :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 11, 16:09
Írta: 000000000 Dátum 2006 december 11, 16:09
Hello MasterGy!
Mintha az eddig írott válaszok semmilyen
hatással nem lennének Rád, látom elszánt vagy!
Egyirányú DC motor hajtás végfokot jobb ha
azonnal elfelejted, ugyanis a motorodat fékezni is tudni kell, egyébként én is azt mondom,
mint a többiek, kevés az esélyed, és elvileg
is hibásnak tűnik a kindulási pontod.
De azért "küszködj még", hátha vannak még
csodák...
Üdv.:Tibor45
Mintha az eddig írott válaszok semmilyen
hatással nem lennének Rád, látom elszánt vagy!
Egyirányú DC motor hajtás végfokot jobb ha
azonnal elfelejted, ugyanis a motorodat fékezni is tudni kell, egyébként én is azt mondom,
mint a többiek, kevés az esélyed, és elvileg
is hibásnak tűnik a kindulási pontod.
De azért "küszködj még", hátha vannak még
csodák...
Üdv.:Tibor45
Cím: Re:Léptetőmotor
Írta: ki005gz70 Dátum 2006 december 11, 21:29
Írta: ki005gz70 Dátum 2006 december 11, 21:29
Sziasztok !
Nah összehoztam ma egy kis "demót"
egy tengelyen dc, és stepper, és ha megnézitek a videót, ti is "érezni fogjátok" ! :)
Sajna csak egy irányba megy, csak próbaképp, de a lényeg jól érzékelhető !
Nézzétek meg a videót ! katt ide:
http://www.speedyshare.com/714390686.html
Várom a véleményeket ! :)
Nah összehoztam ma egy kis "demót"
egy tengelyen dc, és stepper, és ha megnézitek a videót, ti is "érezni fogjátok" ! :)
Sajna csak egy irányba megy, csak próbaképp, de a lényeg jól érzékelhető !
Nézzétek meg a videót ! katt ide:
http://www.speedyshare.com/714390686.html
Várom a véleményeket ! :)
Cím: Re:Léptetőmotor
Írta: ki005gz70 Dátum 2006 december 11, 21:32
Írta: ki005gz70 Dátum 2006 december 11, 21:32
ha a linkre kattintotok, akkor a "dc es step.zip" nevű filét kell letölteni, abba lesz a video
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2006 december 11, 21:46
Írta: s5f8tmfv3 Dátum 2006 december 11, 21:46
[#merges2] Ebből még lehet is valami! Kitartásod rc kollégára emlékeztet, sok sikert!
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2006 december 11, 22:19
Írta: e3h0cv4ph Dátum 2006 december 11, 22:19
Alakul a dolog, drukkolok neked, annak ellenére, hogy sok negatívumot írtam én is azt szeretném ha működne(bár szerintem összetett mozgásoknál lesz lépésvesztés)-bár ne lenne:)
Az általad írd FET érdekel, mit szólnál az egy az egyben cseréhez. Csináld meg az én fetjeimmel a H-hidat, ha hűtöd a fetet ezt nem tudod tönkretenni, a kollégámmal gyilkoljuk ezeket, még kukába nem ment egy se.
Küldöm a H-hidas rajzot meg a doksit is ha oké a dolog.
Üdv:TT
Az általad írd FET érdekel, mit szólnál az egy az egyben cseréhez. Csináld meg az én fetjeimmel a H-hidat, ha hűtöd a fetet ezt nem tudod tönkretenni, a kollégámmal gyilkoljuk ezeket, még kukába nem ment egy se.
Küldöm a H-hidas rajzot meg a doksit is ha oké a dolog.
Üdv:TT
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 12, 14:37
Írta: 000000000 Dátum 2006 december 12, 14:37
Szia Mastergy!
Az, hogy minden lépés után kap egy rövid impulzust a DC motor, ezt nevezik PWM-nek :)
Szerintem az irányváltásoknál adódhat probléma, talán ha elég jó a DC motor reakcióideje akkor még működhet is. Sok sikert.
Az, hogy minden lépés után kap egy rövid impulzust a DC motor, ezt nevezik PWM-nek :)
Szerintem az irányváltásoknál adódhat probléma, talán ha elég jó a DC motor reakcióideje akkor még működhet is. Sok sikert.
Cím: Re:Léptetőmotor
Írta: ra8nsmk6w Dátum 2006 december 12, 15:46
Írta: ra8nsmk6w Dátum 2006 december 12, 15:46
Ugy gondolom, hogy az igazi kihivás egy komplex
feladat elvégzése. Nem látom megoldhatatlan kérdésnek, a valószinüsithető végeredmény egy a
léptető és szervómotor kooprodukciója. Ha müködni fog 3d elsőként fogok öszintén gratulálni és ez a minimum. Megoldásként én magam 1 vagy 2 fokkal erösebb steppert használnék, esetleg szervót.
feladat elvégzése. Nem látom megoldhatatlan kérdésnek, a valószinüsithető végeredmény egy a
léptető és szervómotor kooprodukciója. Ha müködni fog 3d elsőként fogok öszintén gratulálni és ez a minimum. Megoldásként én magam 1 vagy 2 fokkal erösebb steppert használnék, esetleg szervót.
Cím: Re:Léptetőmotor
Írta: ybm4ifb Dátum 2006 december 13, 18:38
Írta: ybm4ifb Dátum 2006 december 13, 18:38
Szevasztok
Segítségeteket kérem szereztem VEXTA A3530-9215 tipusu léptető motort.
Van valakinek rola infoja?
Nyomaték stb..
Előre is köszi
Üdv:stojka
Segítségeteket kérem szereztem VEXTA A3530-9215 tipusu léptető motort.
Van valakinek rola infoja?
Nyomaték stb..
Előre is köszi
Üdv:stojka
Cím: Re:Léptetőmotor
Írta: ki005gz70 Dátum 2006 december 14, 13:03
Írta: ki005gz70 Dátum 2006 december 14, 13:03
Köszönöm az áldásotokat ! :))
Gyula ,mit értesz komplex feladaton ?
Nem marás közben használnám, hanem csak pozicionáláskor. Sőt ha csak pl 8 lépéstávot kell mozgatni (annyi lépéstávot használok pixelenként a gravírozáshoz), lehet nem is alkalmazom, gyorsabb úgysem lesz.
Gyula ,mit értesz komplex feladaton ?
Nem marás közben használnám, hanem csak pozicionáláskor. Sőt ha csak pl 8 lépéstávot kell mozgatni (annyi lépéstávot használok pixelenként a gravírozáshoz), lehet nem is alkalmazom, gyorsabb úgysem lesz.
Cím: Re:Léptetőmotor
Írta: ra8nsmk6w Dátum 2006 december 14, 13:39
Írta: ra8nsmk6w Dátum 2006 december 14, 13:39
"köszönöm az áldásotokat "Gondolom a sok negativ ösztökélésnek szól.komlex feladatnak én azt értettem, hogy mindhárom léptető és rajta a 3 Dc motor végrehajt egy teszt feladatot. A sikerben biznod neked kell! ha eléred, rajtunk a sor, hogy megkövessünk. Szurkolok neked mint mindenki másnak aki a még járatlan utat választja.Teszem azért is mert néha még én is járom(pedig sokszor...)
üdv. Gyula
üdv. Gyula
Cím: Re:Léptetőmotor
Írta: ki005gz70 Dátum 2006 december 14, 16:41
Írta: ki005gz70 Dátum 2006 december 14, 16:41
Csak egy tengelyre akarok dc-motort. :) Az x tengelyre, tehát ami jobbra-balra mozog. Az dolgozik legtöbbet. De ha beválik, és gyorsabb lesz, úgyis megosztom veletek a "paramétereket" :)
Üdv:
Gyula :)
Üdv:
Gyula :)
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2006 december 14, 17:15
Írta: Motoros Dátum 2006 december 14, 17:15
Hajrá Gyula! szurkolunk Neked. Apám szokta mondani hogy nincs lehetetlen csak tehetetlen ember :o)
Viszont azt megkérdezném: (úgy hogy közben nem látom át egészen a dolgot, csak sejtem hogy miről van szó) mi van ha sikerűl?? akkor nem lehet elhagyni a léptetőmotort?
Bocs ha hülye a kérdésem--mondom nem igazán vagyok képben.
Viszont azt megkérdezném: (úgy hogy közben nem látom át egészen a dolgot, csak sejtem hogy miről van szó) mi van ha sikerűl?? akkor nem lehet elhagyni a léptetőmotort?
Bocs ha hülye a kérdésem--mondom nem igazán vagyok képben.
Cím: Re:Léptetőmotor
Írta: ki005gz70 Dátum 2006 december 14, 17:28
Írta: ki005gz70 Dátum 2006 december 14, 17:28
köszi motoros ! Nem lehet elhagyni, mert a dc csak segít, de a léptető az úr ! :) Azért nem szabad hogy meghaladja a dc a léptető nyomatékát. Azért akarom leszabályozni a dc motort, frankón "belőni" a nyomatékát.
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2006 december 14, 17:55
Írta: Motoros Dátum 2006 december 14, 17:55
Értem..kösz a választ, várjuk az eredményt!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 14, 19:36
Írta: 000000000 Dátum 2006 december 14, 19:36
Sziasztok!
Vaprószom a következő: függ-e a léptecs forgathatósága (eltűrt frekvencia) a motorfesztől?
Azaz ha egy léptecset azonos áramkorlát mellett
nagyobb fesszel hajtok, pörgethetem-e kíméletlenebbül?
Vaprószom a következő: függ-e a léptecs forgathatósága (eltűrt frekvencia) a motorfesztől?
Azaz ha egy léptecset azonos áramkorlát mellett
nagyobb fesszel hajtok, pörgethetem-e kíméletlenebbül?
Cím: Re:Léptetőmotor
Írta: 9v9rb6gau Dátum 2006 december 14, 20:16
Írta: 9v9rb6gau Dátum 2006 december 14, 20:16
Egyértelműen igen! Pl ha 20V helyett 50V-tal hajtod a motort, a határfreki akár egynéhány kHZ-cel is megnőhet.
A léptetőmotor nyomatéka minden pillanatban egyenesen arányos a tekercse(ke)n átfolyó árammal. Az induktivitáson (motortekercs)az áram felfutásához kell bizonyos idő. Ha a feszt megnöveled, a felfutási idő lecsökken, tehát a tekercsen jóval nagyobb frekin is névlegesre fel tud futni az áram, így a nyomaték megmarad.
A léptetőmotor nyomatéka minden pillanatban egyenesen arányos a tekercse(ke)n átfolyó árammal. Az induktivitáson (motortekercs)az áram felfutásához kell bizonyos idő. Ha a feszt megnöveled, a felfutási idő lecsökken, tehát a tekercsen jóval nagyobb frekin is névlegesre fel tud futni az áram, így a nyomaték megmarad.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 14, 23:47
Írta: 000000000 Dátum 2006 december 14, 23:47
Köszi, erre gondoltam ill. ezt tapasztaltam a gyakorlatban.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 15, 09:00
Írta: 000000000 Dátum 2006 december 15, 09:00
Szia Géza!
A Vezérlők motortuningját nem olvastad végig?! Pont ez a lényeg (emeld a motortápot amig csak lehet)!
A Vezérlők motortuningját nem olvastad végig?! Pont ez a lényeg (emeld a motortápot amig csak lehet)!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 15, 23:39
Írta: 000000000 Dátum 2006 december 15, 23:39
De igen, csak ez most nem a Te vezérlőd hanem egy diszkrét elemekből összerakott bipoláris 4 tengelyes labanc franc. Egyébként a Te vezérlődbe megint nem tudok új értékeket betölteni. A vásári beállítások pedig bár hajtják, nem túl OKék a búr
mocijaimhoz.
mocijaimhoz.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 16, 08:48
Írta: 000000000 Dátum 2006 december 16, 08:48
Ott tökéletesen ment! Nincs márt megint valami funkcióban hagyva? Próbáld bekapcsolás alatt nyomvatartani a törlőgombot!
Ha ennek ellenére sem megy, akkor a PC-d környékén lesz gond, mert a kiállításon simán (többször is) ment (laptopról)!
Ha ennek ellenére sem megy, akkor a PC-d környékén lesz gond, mert a kiállításon simán (többször is) ment (laptopról)!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 16, 08:48
Írta: 000000000 Dátum 2006 december 16, 08:48
A tuning elve minden vezérlőnél ugyan az!
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2006 december 18, 12:39
Írta: Motoros Dátum 2006 december 18, 12:39
Sziasztok
Lehet hogy csak nekem újdonság, de kezdenek elterjedni a bruhsles motorok a mindenféle hajtások között. Alacsony az áruk, nagyon hosszú az életük, nagy teljesítmány kis helyen: nema 34 méretben majdnem 1 lóerő. Ja és nagy fordulatszám ha kell. Most itt nem a modellezők motorjaira gondolok. Van un BLDC motor is ez a nevéből gondolom hogy DC meghajtású--vagy nem??
Ezeket léptetőmotorok házaiba teszik bele javarészt.
Lehet hogy csak nekem újdonság, de kezdenek elterjedni a bruhsles motorok a mindenféle hajtások között. Alacsony az áruk, nagyon hosszú az életük, nagy teljesítmány kis helyen: nema 34 méretben majdnem 1 lóerő. Ja és nagy fordulatszám ha kell. Most itt nem a modellezők motorjaira gondolok. Van un BLDC motor is ez a nevéből gondolom hogy DC meghajtású--vagy nem??
Ezeket léptetőmotorok házaiba teszik bele javarészt.
Cím: Re:Léptetőmotor
Írta: ybm4ifb Dátum 2006 december 18, 17:44
Írta: ybm4ifb Dátum 2006 december 18, 17:44
Sziasztok
A 748-ra ha lenne valaki szives válaszolni,megköszönném!!
ELŐRE is köszi.
Üdv:stojka
A 748-ra ha lenne valaki szives válaszolni,megköszönném!!
ELŐRE is köszi.
Üdv:stojka
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 18, 17:55
Írta: 000000000 Dátum 2006 december 18, 17:55
Csak ezzel találkoztam: VEXTA A3380-9215 (ez 5 fázisú).
Cím: Re:Léptetőmotor
Írta: tumnmsi57 Dátum 2006 december 18, 19:35
Írta: tumnmsi57 Dátum 2006 december 18, 19:35
Ha szervó hajtásban gondolkozol ajánlom a Xilinx FPGA-kat és hozzá a regisztráció fejében ingyen letölthető WEBpack fejlesztőkörnyezetet. Kicsit bonyolultnak tünhet az elején, de ha átlátod a programot hihetetlen egyszerűen lehet vele vezérlést összerakni.
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2006 december 18, 19:39
Írta: Kristály Árpád Dátum 2006 december 18, 19:39
Hallihó Motoros!
Igen, érdekes témának találom, mert a felhasználás végtelen lehetőséget tartalmaz a maró motortól a villamos hajtásig, de akár elektromos jármű is szóba jöhet.
A frekvencia magassága miatt végtelen lehetőségnek tartom, a Japánok szerintem ilyen motor tettek a szuper járművükbe mely a híradóban is látható volt, sőt láttam erről egy filmet, hihetetlen volt, gyórsúlásban leverte a legjobb Porsche.....
Mióta ez a téma felmerült, hihetetlen mennyiségű infot találtam a neten!!!!
Hallihó!
Igen, érdekes témának találom, mert a felhasználás végtelen lehetőséget tartalmaz a maró motortól a villamos hajtásig, de akár elektromos jármű is szóba jöhet.
A frekvencia magassága miatt végtelen lehetőségnek tartom, a Japánok szerintem ilyen motor tettek a szuper járművükbe mely a híradóban is látható volt, sőt láttam erről egy filmet, hihetetlen volt, gyórsúlásban leverte a legjobb Porsche.....
Mióta ez a téma felmerült, hihetetlen mennyiségű infot találtam a neten!!!!
Hallihó!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 18, 20:47
Írta: 000000000 Dátum 2006 december 18, 20:47
Hello Stojka!
Ennyit találtam róla:
A3530-9215 2,6 A/fázis 0,67om
+ 5 fázisu
Laci
Ennyit találtam róla:
A3530-9215 2,6 A/fázis 0,67om
+ 5 fázisu
Laci
Cím: Re:Léptetőmotor
Írta: 9v9rb6gau Dátum 2006 december 18, 21:36
Írta: 9v9rb6gau Dátum 2006 december 18, 21:36
Szervusz Motoros!
Na igen, azért van kis méretben nagy teljesítmény, mert nagy a fordulatszám! Amúgy az állórésze teljesen olyan, mint egy mezei 3 fázisú aszinkron motoré, persze az nem biztos, hogy 400V-os. A forgórésze pedig általában 4-6-8, vagy mégtöbb állandómágnes pólusból áll. A modellmotorok szerkezete is ilyen. Eddig ez egy közönséges szinkronmotor. Ha ezt egy (illetve 3) frekiszabályzott szinuszos fesszel tápláljuk, akkor szinuszmezős szinkon szervómotor lesz belőle. A fordulatszámát, tehát a freki megfelelő szabályzásával lehet állítani. A másik eset, ami végül is a BLDC, vagy magyarul a négyszömezős szinkron szervómotor. Ehhez általában kell még egy kis kiegészítés: a motor tengelyén pontosan tájolva el kell hegyezni a kommutációt vezérlő jeladót. Ez állhat hall elemekből, de lehet optikai is, ami akár az inkrement enkóderrel egybeépítve is lehet. Ennél a fordulatszámot a tekercsekre jutó fesz nagysága határozza meg, úgy mint a kefés DC szervómotoroknál, a 3 tekercs be-kikapcsolgatását, a hall elemekkel vezérelt kommutáló elektronika végzi, a szabályzókör többi részétől függetlenül.
Na igen, azért van kis méretben nagy teljesítmény, mert nagy a fordulatszám! Amúgy az állórésze teljesen olyan, mint egy mezei 3 fázisú aszinkron motoré, persze az nem biztos, hogy 400V-os. A forgórésze pedig általában 4-6-8, vagy mégtöbb állandómágnes pólusból áll. A modellmotorok szerkezete is ilyen. Eddig ez egy közönséges szinkronmotor. Ha ezt egy (illetve 3) frekiszabályzott szinuszos fesszel tápláljuk, akkor szinuszmezős szinkon szervómotor lesz belőle. A fordulatszámát, tehát a freki megfelelő szabályzásával lehet állítani. A másik eset, ami végül is a BLDC, vagy magyarul a négyszömezős szinkron szervómotor. Ehhez általában kell még egy kis kiegészítés: a motor tengelyén pontosan tájolva el kell hegyezni a kommutációt vezérlő jeladót. Ez állhat hall elemekből, de lehet optikai is, ami akár az inkrement enkóderrel egybeépítve is lehet. Ennél a fordulatszámot a tekercsekre jutó fesz nagysága határozza meg, úgy mint a kefés DC szervómotoroknál, a 3 tekercs be-kikapcsolgatását, a hall elemekkel vezérelt kommutáló elektronika végzi, a szabályzókör többi részétől függetlenül.
Cím: Re:Léptetőmotor
Írta: 9v9rb6gau Dátum 2006 december 18, 21:39
Írta: 9v9rb6gau Dátum 2006 december 18, 21:39
Szervusz Motoros!
Na igen, azért van kis méretben nagy teljesítmény, mert nagy a fordulatszám! Amúgy az állórésze teljesen olyan, mint egy mezei 3 fázisú aszinkron motoré, persze az nem biztos, hogy 400V-os. A forgórésze pedig általában 4-6-8, vagy mégtöbb állandómágnes pólusból áll. A modellmotorok szerkezete is ilyen. Eddig ez egy közönséges szinkronmotor. Ha ezt egy (illetve 3) frekiszabályzott szinuszos fesszel tápláljuk, akkor szinuszmezős szinkon szervómotor lesz belőle. A fordulatszámát, tehát a freki megfelelő szabályzásával lehet állítani. A másik eset, ami végül is a BLDC, vagy magyarul a négyszömezős szinkron szervómotor. Ehhez általában kell még egy kis kiegészítés: a motor tengelyén pontosan tájolva el kell hegyezni a kommutációt vezérlő jeladót. Ez állhat hall elemekből, de lehet optikai is, ami akár az inkrement enkóderrel egybeépítve is lehet. Ennél a fordulatszámot a tekercsekre jutó fesz nagysága határozza meg, úgy mint a kefés DC szervómotoroknál, a 3 tekercs be-kikapcsolgatását, a hall elemekkel vezérelt kommutáló elektronika végzi, a szabályzókör többi részétől függetlenül.
Na igen, azért van kis méretben nagy teljesítmény, mert nagy a fordulatszám! Amúgy az állórésze teljesen olyan, mint egy mezei 3 fázisú aszinkron motoré, persze az nem biztos, hogy 400V-os. A forgórésze pedig általában 4-6-8, vagy mégtöbb állandómágnes pólusból áll. A modellmotorok szerkezete is ilyen. Eddig ez egy közönséges szinkronmotor. Ha ezt egy (illetve 3) frekiszabályzott szinuszos fesszel tápláljuk, akkor szinuszmezős szinkon szervómotor lesz belőle. A fordulatszámát, tehát a freki megfelelő szabályzásával lehet állítani. A másik eset, ami végül is a BLDC, vagy magyarul a négyszömezős szinkron szervómotor. Ehhez általában kell még egy kis kiegészítés: a motor tengelyén pontosan tájolva el kell hegyezni a kommutációt vezérlő jeladót. Ez állhat hall elemekből, de lehet optikai is, ami akár az inkrement enkóderrel egybeépítve is lehet. Ennél a fordulatszámot a tekercsekre jutó fesz nagysága határozza meg, úgy mint a kefés DC szervómotoroknál, a 3 tekercs be-kikapcsolgatását, a hall elemekkel vezérelt kommutáló elektronika végzi, a szabályzókör többi részétől függetlenül.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 18, 22:12
Írta: 000000000 Dátum 2006 december 18, 22:12
Porsche, kérlek (ami ha emlékezetem nem csal, dodge viper volt)!
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2006 december 18, 22:19
Írta: Kristály Árpád Dátum 2006 december 18, 22:19
Lehet, de pestiesen szólva, leverte mint vak a poharat.....
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 18, 22:39
Írta: 000000000 Dátum 2006 december 18, 22:39
Az már igaz! Viszont nem lehetett olcsó az akkumulátor lerakat hátul. Volt vagy 25-30db spéci cella.
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2006 december 19, 07:21
Írta: Motoros Dátum 2006 december 19, 07:21
Szia Gépész
AmikITT láthatók azok BLDC motorok, van aminek van jeladója és van ami úgy mint a modellmotor vezérlés a motorról visszajutó lökésekből számolja az aktuális fordulatszámot.
Most szereztem egy modellmotort ami alig öklömnyi és 600W-os, tízezret forog, és 1:3 -ide oda cserélhető áttétel szíjtárcsával szinte pár száztól 30 000-ig forgó fortunát lehetne csinálni kis méretben. Alacsony fordulaton persze biztos csökken a nyomaték, a csökkentő áttétel ellenére is.
AmikITT láthatók azok BLDC motorok, van aminek van jeladója és van ami úgy mint a modellmotor vezérlés a motorról visszajutó lökésekből számolja az aktuális fordulatszámot.
Most szereztem egy modellmotort ami alig öklömnyi és 600W-os, tízezret forog, és 1:3 -ide oda cserélhető áttétel szíjtárcsával szinte pár száztól 30 000-ig forgó fortunát lehetne csinálni kis méretben. Alacsony fordulaton persze biztos csökken a nyomaték, a csökkentő áttétel ellenére is.
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2006 december 19, 07:26
Írta: Motoros Dátum 2006 december 19, 07:26
Hali Árpi
A Japán mérnök átment Kínába hogy az elektromos autója gyártásáról tárgyaljon, és ott bemutatták neki azt a hatalmas gyártelepet ahol Ők már az elektromos taxikat meg az akksikat sorozatgyártják. 1 feltöltés 300 km.
Az ürgének elment a kedve az egésztől amikor ezt meglátta és hazament. Gondolom tudta hogy miért.
A Japán mérnök átment Kínába hogy az elektromos autója gyártásáról tárgyaljon, és ott bemutatták neki azt a hatalmas gyártelepet ahol Ők már az elektromos taxikat meg az akksikat sorozatgyártják. 1 feltöltés 300 km.
Az ürgének elment a kedve az egésztől amikor ezt meglátta és hazament. Gondolom tudta hogy miért.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 19, 14:58
Írta: 000000000 Dátum 2006 december 19, 14:58
NaUgye hogy jók a kinaiak [#duma]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 19, 15:57
Írta: 000000000 Dátum 2006 december 19, 15:57
Jók, csak miattuk fogunk előbb-utóbb éhenhalni
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 19, 16:01
Írta: 000000000 Dátum 2006 december 19, 16:01
[#nemtudom]Ha nem lesz mit enni, majd iszunk[#pias] (abban mi vagyunk jobbak!)
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2006 december 19, 16:02
Írta: Kristály Árpád Dátum 2006 december 19, 16:02
Egyszerű a képlet, nem kell kinai piacon vásárólni, nade, ki tudja megállni, fél világ ezt veszi.......
Hallihó!
Hallihó!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 19, 17:27
Írta: 000000000 Dátum 2006 december 19, 17:27
Szerintem ebben mi, szlovákok vagyunk a legjobbak, ez már elég jól megy nekunk...ha más nem is![#pias][#pias][#buck]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 19, 17:31
Írta: 000000000 Dátum 2006 december 19, 17:31
Sokan vannak, megesszük őket...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 19, 17:40
Írta: 000000000 Dátum 2006 december 19, 17:40
Körítésnek meg rizst veszünk tőlük![#vigyor3]
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2006 december 19, 20:05
Írta: Motoros Dátum 2006 december 19, 20:05
Valaki mondta (lehet nem igaz) hogy felvásárolták szinte a világ összes rézbányáját és most diktálhatnak.
Az tény hogy idén januárban a sárgaréz kilója 800- 1000 ft volt, most 2000-2300ft+áfa. De a többi szinesfém is megduplázódott egy év alatt.
Egy fémtömegcikkes ismerősömnek negyven embere volt most van hat és a gépeit árúlja de az sem kell senkinek.
Az tény hogy idén januárban a sárgaréz kilója 800- 1000 ft volt, most 2000-2300ft+áfa. De a többi szinesfém is megduplázódott egy év alatt.
Egy fémtömegcikkes ismerősömnek negyven embere volt most van hat és a gépeit árúlja de az sem kell senkinek.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 19, 20:07
Írta: 000000000 Dátum 2006 december 19, 20:07
Utálom a rizst bármilyen formában!!! A krumpli/burgonya/pityóka (kinek hogy tetszik) a kedvencem.
Remélem értettétek... ;/
Remélem értettétek... ;/
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 19, 22:31
Írta: 000000000 Dátum 2006 december 19, 22:31
Csak nehogy "sárgaságot" kapjunk toluk! Az én májam már a sort is "ferde szemmel" nézi![#circling]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 19, 22:48
Írta: 000000000 Dátum 2006 december 19, 22:48
a sörre gondoltam, nem sorra, nekem ezen a billentyűzeten könnyebb így írni.
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2006 december 19, 23:32
Írta: Kristály Árpád Dátum 2006 december 19, 23:32
Hallihó Motoros!
Tudod ez annak az oka, hogy dalolva nézzük amikor a sok nyugati cég a MÉH telepen össszegyűjtőtt "lopot " holmit kiviszi az orszából......
Természetes, hogy jobban járnak mint ha ércet bányásznának......
De lassan elfogy a Singer varógép és a többiek....
Valamikor a MÉH telep egy kincsebánya volt, mára lassan szemét telep...., hol vannak azok az idő amikor vákumszivattyúkat stb. lehetet találni....
"Na ezt csak viccnek gondoltam....."
Hallihó!
Tudod ez annak az oka, hogy dalolva nézzük amikor a sok nyugati cég a MÉH telepen össszegyűjtőtt "lopot " holmit kiviszi az orszából......
Természetes, hogy jobban járnak mint ha ércet bányásznának......
De lassan elfogy a Singer varógép és a többiek....
Valamikor a MÉH telep egy kincsebánya volt, mára lassan szemét telep...., hol vannak azok az idő amikor vákumszivattyúkat stb. lehetet találni....
"Na ezt csak viccnek gondoltam....."
Hallihó!
Cím: Re:Léptetőmotor
Írta: ybm4ifb Dátum 2006 december 20, 08:47
Írta: ybm4ifb Dátum 2006 december 20, 08:47
Szevasztok
Köszönöm szépen.
Üdv mindenkinek..jo lenne az a kishölgy..a fa alatt..legalább arra az egy estére..
Köszönöm szépen.
Üdv mindenkinek..jo lenne az a kishölgy..a fa alatt..legalább arra az egy estére..
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2006 december 20, 09:54
Írta: 000000000 Dátum 2006 december 20, 09:54
...vagy inkább alattam...[#awink]
Cím: Re:Léptetőmotor
Írta: Bicska Dátum 2006 december 30, 18:52
Írta: Bicska Dátum 2006 december 30, 18:52
Sziasztok. A következő lenne a kérdésem: Sajnos mostanség egyáltalán nincs időm lemenni a műhelybe, a gépem pedig vezérlő nélkül ácsingózik egy jó ideje, viszont nem tudom, hogy a léptetőmotorjaimra rossz hatással van-e, ha télen a -10 -15 fokban vannak? (azt tudom, hogy pozitív hőmérséklet tartományban van egy oylan pont, ahol le tud mágneseződni..) BUÉK MINDENKINEK![#integet2]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 02, 21:22
Írta: 000000000 Dátum 2007 január 02, 21:22
Sziasztok!!!
Elöször is BUÉK mindenkinek!!
Egy kérdésem lenne a 32-es mechanikával kapcsolatban.
A h1-es vezérlővel hogy lehet meghajtani 3 db 2.5A-es léptetőmotort? H1-es 4.7A-et tud de ez jóval több nem?
Ha mégis lehet akkor mekkora a legnagyobb A-ü motor amit még meg lehet hajtani, mert akkor olyat rendelek.
Az elektronikához sajnos nem értek.
A választ előre is köszi.
Elöször is BUÉK mindenkinek!!
Egy kérdésem lenne a 32-es mechanikával kapcsolatban.
A h1-es vezérlővel hogy lehet meghajtani 3 db 2.5A-es léptetőmotort? H1-es 4.7A-et tud de ez jóval több nem?
Ha mégis lehet akkor mekkora a legnagyobb A-ü motor amit még meg lehet hajtani, mert akkor olyat rendelek.
Az elektronikához sajnos nem értek.
A választ előre is köszi.
Cím: Re:Léptetőmotor
Írta: e7c897sd8 Dátum 2007 január 02, 21:39
Írta: e7c897sd8 Dátum 2007 január 02, 21:39
Szia kezdő versenyző! Maximum 4.7A-es motor szerintem, de lehet kisebb is. [#papakacsint]
A többit olvasd a h1 motortunung résznél!
A többit olvasd a h1 motortunung résznél!
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2007 január 02, 21:46
Írta: s5f8tmfv3 Dátum 2007 január 02, 21:46
Nem vagyok ugyan a téma szakértője, de nem hiszem hogy az erősen fagypont alatti hőmérséklet gyengítené a motorjaid mágneseit. Gondolj csak bele mennyi állandó mágnesű motor kénytelen tűrni a hideget, pl. a gépkocsik önindítói, antenna forgató motorok stb. Még nem hallottam hogy valaki panaszkodott volna a hideg miatti motorgyengülésről. Persze lehet hogy tévedek, de ha nem vízben tárolod a motorokat, akkor szerintem nem lehet baj.
Cím: Re:Léptetőmotor
Írta: Rinaldo Dátum 2007 január 03, 00:13
Írta: Rinaldo Dátum 2007 január 03, 00:13
Találtam adatot a kérdéseddel kapcsolatban:
- a tárolási hőmérséklet -20...+70 °C
- max tárolási idő 1 év !!
Ez utóbbi 3 a-es motornál még nincs megadva, viszont a 4,7 A-es nél már igen!!
- a tárolási hőmérséklet -20...+70 °C
- max tárolási idő 1 év !!
Ez utóbbi 3 a-es motornál még nincs megadva, viszont a 4,7 A-es nél már igen!!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 03, 07:16
Írta: 000000000 Dátum 2007 január 03, 07:16
Szia!
Rosszul értelmezed az adatokat! H1 Vezérlő motoronként tud max. 4.7A-t! Teheát max. 3db (vagy 6 db, kiviteltől függően, lásd Multi Axis-t) 4.7A-es motort tud egyszerre meghajtani.
Rosszul értelmezed az adatokat! H1 Vezérlő motoronként tud max. 4.7A-t! Teheát max. 3db (vagy 6 db, kiviteltől függően, lásd Multi Axis-t) 4.7A-es motort tud egyszerre meghajtani.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 04, 17:06
Írta: 000000000 Dátum 2007 január 04, 17:06
Szia!
Köszi a választ.
Köszi a választ.
Cím: Re:Léptetőmotor
Írta: Bicska Dátum 2007 január 04, 17:49
Írta: Bicska Dátum 2007 január 04, 17:49
Kössz...csak biztonság kedvéért...
Cím: Re:Léptetőmotor
Írta: 3dfhfckk Dátum 2007 január 09, 23:26
Írta: 3dfhfckk Dátum 2007 január 09, 23:26
Üdv mindenkinek
Szert tettem 2 db Minebea léptetőmotorra.

A motor 6 kivezetéses.

A piros-pirosfehér és a zöld-zöldfehér szál között 10,6 Ohm az ellenállás. A fekete-piros valamint a fekete-pirosfehér és a fehér-zöld valamint a fehér-zöldfehér között pedig 5,6 Ohm az ellenállás. A kérdésem az lenne mivel kezdő vagyok, hogy a fekete és a fehér vezeték a középkivezetés?
Szert tettem 2 db Minebea léptetőmotorra.
A motor 6 kivezetéses.
A piros-pirosfehér és a zöld-zöldfehér szál között 10,6 Ohm az ellenállás. A fekete-piros valamint a fekete-pirosfehér és a fehér-zöld valamint a fehér-zöldfehér között pedig 5,6 Ohm az ellenállás. A kérdésem az lenne mivel kezdő vagyok, hogy a fekete és a fehér vezeték a középkivezetés?
Cím: Re:Léptetőmotor
Írta: 3dfhfckk Dátum 2007 január 09, 23:31
Írta: 3dfhfckk Dátum 2007 január 09, 23:31
Bocsánat az előbb elrontottam a linket.


Cím: Re:Léptetőmotor
Írta: 3dfhfckk Dátum 2007 január 09, 23:35
Írta: 3dfhfckk Dátum 2007 január 09, 23:35
Ez az utolsó.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 10, 06:36
Írta: 000000000 Dátum 2007 január 10, 06:36
Igen. Mindig a szimetrikus és kisebb Ohmú a közös vég. A tekercselés két széle között méred a nagyobb ellenállást.
Cím: Re:Léptetőmotor
Írta: 3dfhfckk Dátum 2007 január 10, 07:36
Írta: 3dfhfckk Dátum 2007 január 10, 07:36
Hello.
Köszönöm a választ.
Köszönöm a választ.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 12, 17:25
Írta: 000000000 Dátum 2007 január 12, 17:25
Sziasztok!
Úgy tűnik mindegy, hogy egy bipoláris vagy egy "bipolárosított" uni moci második tekercsét milyen polaritással kötöm be. Mindenhogy mükszik. Vagy tévedek?
Úgy tűnik mindegy, hogy egy bipoláris vagy egy "bipolárosított" uni moci második tekercsét milyen polaritással kötöm be. Mindenhogy mükszik. Vagy tévedek?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 12, 22:46
Írta: 000000000 Dátum 2007 január 12, 22:46
Elvileg mindegy, de a forgásirány megfordul...
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2007 január 13, 19:20
Írta: Egyújabbgépépítő Dátum 2007 január 13, 19:20
Sziasztok.
Újj vagyok a fórumon, mint sokan mások én is építeni szeretnék egy gépet. Persze mindég az anyagbeszerzéssel vannak a gondok. Találtam a neten egy lehetséges motorforrást de a szállítási költség nagyon magas, viszont ha még társul hozzám valaki már egészen ehető. A következőről lenne szó Léptető motor.
Ha valakit érdekel jelentkezzen.
Újj vagyok a fórumon, mint sokan mások én is építeni szeretnék egy gépet. Persze mindég az anyagbeszerzéssel vannak a gondok. Találtam a neten egy lehetséges motorforrást de a szállítási költség nagyon magas, viszont ha még társul hozzám valaki már egészen ehető. A következőről lenne szó Léptető motor.
Ha valakit érdekel jelentkezzen.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 13, 19:27
Írta: 000000000 Dátum 2007 január 13, 19:27
A baloldali menüket nézegetted már?
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2007 január 13, 19:52
Írta: Egyújabbgépépítő Dátum 2007 január 13, 19:52
Igen, de igy feleannyiba kerülne.
Cím: Re:Léptetőmotor
Írta: Messer Dátum 2007 január 13, 20:18
Írta: Messer Dátum 2007 január 13, 20:18
Felejtősek!!!
Több mint százszor rendeltem már külföldről árút, de ők viszik el a pálmát. 7 mocit és négy hajtáselektronikát rendeltem náluk. Kb. 1 hónapig leveleztem velük. A teljes bonyodalomsorozatot nem írom le csak 1-2 érdekességet. 3 személlyel kerültem kapcsolatba, (köztük a főnökkel is). Mindegyiknek többször is elküldtem mindíg ugyanazt a tartalmú emilt. Mit kérek , milyen szállítási és milyen postázási címre. Szükséges összeget betettem arra a számlára aminek a számát megadtam nekik. Először többet akartak levonni.
Tisztázták a hiba okát, de megint többet akartak levonni. Ja, és a szállítási költség több mint 50000 forint volt. A számlát nem a megadott címre állították ki...
Több mint százszor rendeltem már külföldről árút, de ők viszik el a pálmát. 7 mocit és négy hajtáselektronikát rendeltem náluk. Kb. 1 hónapig leveleztem velük. A teljes bonyodalomsorozatot nem írom le csak 1-2 érdekességet. 3 személlyel kerültem kapcsolatba, (köztük a főnökkel is). Mindegyiknek többször is elküldtem mindíg ugyanazt a tartalmú emilt. Mit kérek , milyen szállítási és milyen postázási címre. Szükséges összeget betettem arra a számlára aminek a számát megadtam nekik. Először többet akartak levonni.
Tisztázták a hiba okát, de megint többet akartak levonni. Ja, és a szállítási költség több mint 50000 forint volt. A számlát nem a megadott címre állították ki...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 13, 20:53
Írta: 000000000 Dátum 2007 január 13, 20:53
Hasonló a véleményem, mint Messer-nek. Csak akkor vágj bele, ha sok időd van várni a csomagot + perfektül tudsz angolul... de valószínű, hogy kistételben így sem fogja megérni. Postaköltséget számolhatsz nyugodtan mégegyszer annyi összeget, mint az áru értéke. Amikor megérkezik a cucc a reptérre elvámolják (22 Euro érték felett minden vámköteles!!) +20%ÁFA +kb.3-4000 Ft illeték +3-4% VÁM(árufüggő).
És akkor ugyanott vagy, mintha itthon megvennéd, bár nem biztos, mert lehet, hogy a csomag elveszik, a vámosok lenyúlnak belőle...
Ja és néhányszáz egyeztetés faxolás után kapod csak meg az árut. A vámosok előszeretettel szivatják azokat, akiken látják, hogy még tapasztalatlanok a témában, úgyhogy mire megkapod a cuccot, lehet, hogy rászámolnak raktározási díjat is.
Most jöhet a kérdés, hogy akkor hogyan éri meg a nagy cégeknek?
Nagytételben más a szitu. Rendelnek egy konténernyi motort, szállítás hajón fillérekért... + van tapasztalatuk a vámoltatásban.
És akkor ugyanott vagy, mintha itthon megvennéd, bár nem biztos, mert lehet, hogy a csomag elveszik, a vámosok lenyúlnak belőle...
Ja és néhányszáz egyeztetés faxolás után kapod csak meg az árut. A vámosok előszeretettel szivatják azokat, akiken látják, hogy még tapasztalatlanok a témában, úgyhogy mire megkapod a cuccot, lehet, hogy rászámolnak raktározási díjat is.
Most jöhet a kérdés, hogy akkor hogyan éri meg a nagy cégeknek?
Nagytételben más a szitu. Rendelnek egy konténernyi motort, szállítás hajón fillérekért... + van tapasztalatuk a vámoltatásban.
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2007 január 13, 22:06
Írta: Egyújabbgépépítő Dátum 2007 január 13, 22:06
Mivel EU ból származik az áru nincs vám. A szállítási költség adott, tudok vele számolni. Valamint már van tapsztalatom külföldi árubeszrzésről és korántsem olyan reménytelen.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 13, 22:14
Írta: 000000000 Dátum 2007 január 13, 22:14
És a jótállás, nálunk (szlovákia) 2 éves, azt hiszem nálatok 1, de ez is jó valamire. Nem tudom, hogy tudod veluk elintézni, ha valami nem úgy megyen ahogy kell. Tudom, hogy az új , az új, de már nálam is megtortént, hogy hibás volt a motyó. A végén megveszed onnan felárért és othon mégegyszer egész árért.
EGYUJABBGÉPÉPÍTO helyében én azért is otthon vásárolnék, mert a fináléban kezdodenek a problémák és aki eladta neked az áruját, segít neked meg is oldani (otthoniak). Hidd el ezt semmilyen pénzzel nem lehet kifizetni.
...már megint okoskodok, de ez is egy vélemény...[#nemtudom]
EGYUJABBGÉPÉPÍTO helyében én azért is otthon vásárolnék, mert a fináléban kezdodenek a problémák és aki eladta neked az áruját, segít neked meg is oldani (otthoniak). Hidd el ezt semmilyen pénzzel nem lehet kifizetni.
...már megint okoskodok, de ez is egy vélemény...[#nemtudom]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 13, 22:16
Írta: 000000000 Dátum 2007 január 13, 22:16
... most jutott eszembe helyesen: Jótállás=garancia ... már csak ilyen vagyok
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 14, 00:22
Írta: 000000000 Dátum 2007 január 14, 00:22
Sziasztok!
Tévedésben vagy 22 Ero feletti értéknél elvámoltatnak :( hiába EUs országból szállíttatsz. Persze meg lehet próbálni külföldről rendelni, csak nem biztos, hogy megéri... főleg ha nagyteljesítményű->nagy súlyú mocikat akarsz behozni. A DHL és a UPS oldalakon vannak szállítási díj kalkulátorok, elég rémisztő árakat hoz ki[#violent]
Pár hónapja rendeltem pár cuccot külföldről, ha jól emlékszem 45kg volt, a szállítási költség meg 100 rugó... úgyhogy kb. ott voltam, mintha itthon megvettem volna, leszámítva a vámosok baromságait meg a sok idegeskedést...
Tévedésben vagy 22 Ero feletti értéknél elvámoltatnak :( hiába EUs országból szállíttatsz. Persze meg lehet próbálni külföldről rendelni, csak nem biztos, hogy megéri... főleg ha nagyteljesítményű->nagy súlyú mocikat akarsz behozni. A DHL és a UPS oldalakon vannak szállítási díj kalkulátorok, elég rémisztő árakat hoz ki[#violent]
Pár hónapja rendeltem pár cuccot külföldről, ha jól emlékszem 45kg volt, a szállítási költség meg 100 rugó... úgyhogy kb. ott voltam, mintha itthon megvettem volna, leszámítva a vámosok baromságait meg a sok idegeskedést...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 14, 08:12
Írta: 000000000 Dátum 2007 január 14, 08:12
Az EU egy nagy 0! Ugyanúgy kell mindenre vámárúnyilatkozatot kitölteni, mint a régi rendszerbe (tök mindegy hova üldöm az EU-n belülre, vagy kívülre)! A szállítási költségek meg horribilisek.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 14, 19:12
Írta: 000000000 Dátum 2007 január 14, 19:12
Sziasztok!
Én kezdtem el szük egy éve a hollandusoktól (Deitech BV) a mocivásárlását. Nekem 3 db. 1.7 Nm-e motor szállítással (megjegyzem semmiféle vámot nem kellett fizetnem) 160 pénzembe került. A pénzt is német módra, ajánlott levélben küldtem ki. A szállítást a DPD végezte, amelynek telephelye mellesleg kb. 2 km-re van tőlem. A Hollandussal (egy Harrie nevű csávó) és mellesleg a DPD-vel eddig több mint meg vagyok elégedve!
Én kezdtem el szük egy éve a hollandusoktól (Deitech BV) a mocivásárlását. Nekem 3 db. 1.7 Nm-e motor szállítással (megjegyzem semmiféle vámot nem kellett fizetnem) 160 pénzembe került. A pénzt is német módra, ajánlott levélben küldtem ki. A szállítást a DPD végezte, amelynek telephelye mellesleg kb. 2 km-re van tőlem. A Hollandussal (egy Harrie nevű csávó) és mellesleg a DPD-vel eddig több mint meg vagyok elégedve!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 január 14, 21:08
Írta: bmejdz9nu Dátum 2007 január 14, 21:08
Nekem eddig semmihez... Eu-n belül talán.... próbálj egy másik postahivatalt...nem tudják... de nem csak itthon külföldön sem mindíg...
Szerintem jó ez az EU. Könnyebb venni és eladni(!) is! Csak még idő kell...míg rájövünk mi is meg kint is, hogy kell a lehetőséget kihasználni...
Költségek...
2 kg-ig lehet levélként addíg ok... felette húzós.... ha olyan a szitú: akkor 2x de levél...
2 kg felett talán jobb lenne a postán kívüli szolgáltatókat megtalálni... Pl. DPD, Hermes...
Jó tudni: a DHL és pl. TNT szerződéssel kb. fele árért dolgoznak... A cégemnek van accountja a TNT-nél... teljesen mások az árak... de ehhez először falhoz kell állítani őket... egy két import után automatikusan ők is felfigyelnek...
A képlet egyszerű pl. dhl.com-on meg kell keresni az adott ország árait... ez pl. kínából harmada... aztán...
Szerintem jó ez az EU. Könnyebb venni és eladni(!) is! Csak még idő kell...míg rájövünk mi is meg kint is, hogy kell a lehetőséget kihasználni...
Költségek...
2 kg-ig lehet levélként addíg ok... felette húzós.... ha olyan a szitú: akkor 2x de levél...
2 kg felett talán jobb lenne a postán kívüli szolgáltatókat megtalálni... Pl. DPD, Hermes...
Jó tudni: a DHL és pl. TNT szerződéssel kb. fele árért dolgoznak... A cégemnek van accountja a TNT-nél... teljesen mások az árak... de ehhez először falhoz kell állítani őket... egy két import után automatikusan ők is felfigyelnek...
A képlet egyszerű pl. dhl.com-on meg kell keresni az adott ország árait... ez pl. kínából harmada... aztán...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 január 14, 21:20
Írta: bmejdz9nu Dátum 2007 január 14, 21:20
Szerintem minden megy szépen... ahogy szoktam momdani "a világ működik"...
Persze Angol és német nyelvtudáson kívül szükséges a az Ő fejükkel gondolkodni.... ez mindenhol más és más... és néha nagyon más...
Én 3 részre osztom a világot:
1. Német gondolkodás - Ezt bárhol Európában alk. lehet... Ez talán a legegyszerűb...
2.Amerikai - Ez elég speciális... talán ez a legbonyolultab... Egy amerikai azt akarja, hogy úgy érezd mindketten jó boltot csináltatok..
3 Kínai - Bárhol távolkeleten... pl. Singapore, Malaysia, Hong-Kong.... Ez kicsit ingoványos... de kiszámíthatóak... kellenek biztosítékok...
De ne kérjétek, hogy meséljem el... mert nagyon bonyolult a dolog... persze én már jártam ezekben a régiókban... ez is nagyon fontos momentum....
Persze Angol és német nyelvtudáson kívül szükséges a az Ő fejükkel gondolkodni.... ez mindenhol más és más... és néha nagyon más...
Én 3 részre osztom a világot:
1. Német gondolkodás - Ezt bárhol Európában alk. lehet... Ez talán a legegyszerűb...
2.Amerikai - Ez elég speciális... talán ez a legbonyolultab... Egy amerikai azt akarja, hogy úgy érezd mindketten jó boltot csináltatok..
3 Kínai - Bárhol távolkeleten... pl. Singapore, Malaysia, Hong-Kong.... Ez kicsit ingoványos... de kiszámíthatóak... kellenek biztosítékok...
De ne kérjétek, hogy meséljem el... mert nagyon bonyolult a dolog... persze én már jártam ezekben a régiókban... ez is nagyon fontos momentum....
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 14, 21:53
Írta: 000000000 Dátum 2007 január 14, 21:53
Sziasztok!
Péter: miért kéne a méregdrága DHL, vagy TNT?
Ha a távolkeletről rendelsz, szerintem még az is megéri, ha egy forwarder céget bízol meg az átvétellel, meg kiszállítással... persze a legjobb, ha magad kimész a reptérre a cuccért, úgy sokkal olcsóbb, legalábbis nekem ez derült ki.
Géza, szerintem ez a 22Euro feletti érték VÁM dolog egy éve még nem volt, ez "kedves" kormányunk egyik legújabb vívmánya lehet...
Péter: miért kéne a méregdrága DHL, vagy TNT?
Ha a távolkeletről rendelsz, szerintem még az is megéri, ha egy forwarder céget bízol meg az átvétellel, meg kiszállítással... persze a legjobb, ha magad kimész a reptérre a cuccért, úgy sokkal olcsóbb, legalábbis nekem ez derült ki.
Géza, szerintem ez a 22Euro feletti érték VÁM dolog egy éve még nem volt, ez "kedves" kormányunk egyik legújabb vívmánya lehet...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 14, 22:21
Írta: 000000000 Dátum 2007 január 14, 22:21
Tyutyi!
Megint nem értem, mert a 120 pénzes, új (egyébként rossz) vezérlőmet német barátom a múlt év végén küldte utánam a DHL-el. Vámot arra sem kellett perkálnom. De a legújabb "vívmányoktól" én is "púzok"!
Megint nem értem, mert a 120 pénzes, új (egyébként rossz) vezérlőmet német barátom a múlt év végén küldte utánam a DHL-el. Vámot arra sem kellett perkálnom. De a legújabb "vívmányoktól" én is "púzok"!
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 január 14, 22:29
Írta: 4mjnxdwuu Dátum 2007 január 14, 22:29
Üdv Géza.
Miért sz.r a vezérlőd??? Lehet érdekelne.
Miért sz.r a vezérlőd??? Lehet érdekelne.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 január 14, 23:21
Írta: bmejdz9nu Dátum 2007 január 14, 23:21
A Budapesti reptérre menni sopronból... költséges...
A Bécsi reptérre szoktam menni, mert oda rendelni az más díjzóna besorolás... (DHL, TNT és a többi is igy gondolja... szőrnyű...)
Nyugat Európa... Hát igen... 1/3-al szokott olcsóbb lenni a szállítás... de ez is csak akkor éri meg, ha 10 kg feletti az árú...
Meg azárt tudni kell a bécsi vámosok elég szigorú emberek... finoman szólva...ez már majdnem betonfal volt utoljára... de aztán kivágtam magamat...
Pedíg nem is az volt a kérdés, hogy akarok e fizetni...
Az Úrat már Brüsszel-el kellett finoman ilyesztegetnem... mert nem tudta vagy nem akarta tudni, hogy már EU van... de ez egy hossszú történet...
A Bécsi reptérre szoktam menni, mert oda rendelni az más díjzóna besorolás... (DHL, TNT és a többi is igy gondolja... szőrnyű...)
Nyugat Európa... Hát igen... 1/3-al szokott olcsóbb lenni a szállítás... de ez is csak akkor éri meg, ha 10 kg feletti az árú...
Meg azárt tudni kell a bécsi vámosok elég szigorú emberek... finoman szólva...ez már majdnem betonfal volt utoljára... de aztán kivágtam magamat...
Pedíg nem is az volt a kérdés, hogy akarok e fizetni...
Az Úrat már Brüsszel-el kellett finoman ilyesztegetnem... mert nem tudta vagy nem akarta tudni, hogy már EU van... de ez egy hossszú történet...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 január 14, 23:34
Írta: bmejdz9nu Dátum 2007 január 14, 23:34
A mostani Eu. törvény szerint, ha személyesen léped át az áruval a hátárt akkor most 150 Euro a limit... (Ha jól tudom most szavazzák 300-400 Euróra.. ennyi - kb. 500 USD - az USA-ban is...)
De ! Ha csomag jön ez teljesen más eset... 20 Euró de csak ha köny vagy hasonló... vagy ZERO(!)... ezt jó tudni... Az "ajándék - Gift" is vám és Áfa köteles... A vám összege általában nem jelentős, inkább az Áfa a meghatározó és az eljárási illeték...
De ! Ha csomag jön ez teljesen más eset... 20 Euró de csak ha köny vagy hasonló... vagy ZERO(!)... ezt jó tudni... Az "ajándék - Gift" is vám és Áfa köteles... A vám összege általában nem jelentős, inkább az Áfa a meghatározó és az eljárási illeték...
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2007 január 15, 12:58
Írta: Egyújabbgépépítő Dátum 2007 január 15, 12:58
Nem gondoltam, hogy ekkora vihart kavarok a kérdésemmel. Különben van tapasztalat akár távolkeleti export importal is. Én csak szerettem volna olcsóbban megúszni néhány alkatrész beszerzését.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 15, 16:38
Írta: 000000000 Dátum 2007 január 15, 16:38
Sziasztok!
Ez nem vihar, csak egy fórum :) aminek a lényege, hogy lehet vitatkozni, vagy egyetérteni és érvelni :)) Ha rendelsz cuccot, akkor majd írd le a tapasztelatodat....
Ez nem vihar, csak egy fórum :) aminek a lényege, hogy lehet vitatkozni, vagy egyetérteni és érvelni :)) Ha rendelsz cuccot, akkor majd írd le a tapasztelatodat....
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 15, 17:15
Írta: 000000000 Dátum 2007 január 15, 17:15
Németországból vettem a 4 tengelyes bipol vezérlőt, de: 1. csak max 2 A-t bír ki motoronként, 2. az Y tengelye kapásból csak az egyik irányba ment, 3. egyáltalán nem hajlandó kajálni a komolyabb szoftvereket mint pl. Mach3. Így csak a TCNC-vel tudom meghajtani amelynek azonban problémái vannak. Eredetileg egy 4 tengelyes habvágóhoz szántam. Azonban az egyetlen futtatható progi, a TCNC nem tartja a sebességet az irányváltások környezetében. Így aztán a vezérlő nem felel meg elvárásaimnak. Nem beszélve arról, hogy maga a vezérlő nyákja is nem profi, hanem csak egy manufaktúrális munka......
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 január 15, 17:56
Írta: bmejdz9nu Dátum 2007 január 15, 17:56
Hát ez is benne van a pakliban... Nagyon kell tudni mit akarsz és mi az amit kapsz...
Az import "játékban" ha 10% alatt tudod tartani ezeket a dolgokat az már nagyon jó....
A németek a vezérlőt lehet hogy WinPC-NC-hez csinálták... (dobhatnál egy mailt melyik ez...)
Szerintem vezérlőt rendelni... support és pénzfisszafizetési garancia nélkül ... talán a legrázósabb...
Nem H1 vez. reklám, de egy vezérlő értékét a műszaki támogatás erősen emeli és szükséges talán elkerülhetetlen...
Nekem küldtek Malaysiából 2 olyan lineáris vezetőt, hogy csak konyhafiókhoz lesz jó...[#rinya]
De azért nem nagy a baj mert a fűrészgép mozgató állványhoz jó lessz... Na meg persze a pénzt visszafizették... csak a végén nem akarták az áru visszaküldést mert sok lett volna nekik...
Az import "játékban" ha 10% alatt tudod tartani ezeket a dolgokat az már nagyon jó....
A németek a vezérlőt lehet hogy WinPC-NC-hez csinálták... (dobhatnál egy mailt melyik ez...)
Szerintem vezérlőt rendelni... support és pénzfisszafizetési garancia nélkül ... talán a legrázósabb...
Nem H1 vez. reklám, de egy vezérlő értékét a műszaki támogatás erősen emeli és szükséges talán elkerülhetetlen...
Nekem küldtek Malaysiából 2 olyan lineáris vezetőt, hogy csak konyhafiókhoz lesz jó...[#rinya]
De azért nem nagy a baj mert a fűrészgép mozgató állványhoz jó lessz... Na meg persze a pénzt visszafizették... csak a végén nem akarták az áru visszaküldést mert sok lett volna nekik...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 15, 18:50
Írta: 000000000 Dátum 2007 január 15, 18:50
Határon... az EU külső határát kell érteni.
Az EU25(27 immar 2 hete) országban NINCS VÁM és néhány külön listázott pl.(dhány, alkohol, benzin)cikk kivételével TOTÁL SZABAD az áruforgalom!!!!
Párizsban éppúgy vásárolhatsz, mint Szolnokon...
A belső (magyar)határokon ÁRUELLENŐRZÉS most sincs és hamarosan személy ellenőrzés sem lesz.
Csokolom 2004. május 1. óta az EU számunkra TELJESEN belföld....néhány átmeneti korlátozással.
Az EU25(27 immar 2 hete) országban NINCS VÁM és néhány külön listázott pl.(dhány, alkohol, benzin)cikk kivételével TOTÁL SZABAD az áruforgalom!!!!
Párizsban éppúgy vásárolhatsz, mint Szolnokon...
A belső (magyar)határokon ÁRUELLENŐRZÉS most sincs és hamarosan személy ellenőrzés sem lesz.
Csokolom 2004. május 1. óta az EU számunkra TELJESEN belföld....néhány átmeneti korlátozással.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 január 15, 18:55
Írta: bmejdz9nu Dátum 2007 január 15, 18:55
Igen, természetesen.
A "határ" kifejezéssel az Eu. határát értettem...
A "határ" kifejezéssel az Eu. határát értettem...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 20, 17:37
Írta: 000000000 Dátum 2007 január 20, 17:37
Sziasztok!
Nem találtom hozzá a neten leírást, szerintetek kb milyen adottságokkal rendelekzik?
Nem találtom hozzá a neten leírást, szerintetek kb milyen adottságokkal rendelekzik?
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 január 20, 17:49
Írta: bmejdz9nu Dátum 2007 január 20, 17:49
Mekkora betükkel írnak egyesek... hogy kell ilyet csinálni? Hátha verseny lessz belőle... jobb idejében megtanulnom...
Írott betükkel is lehet ilyet csinálni?
Egyébként mihez nem találsz adottságokat?
Írott betükkel is lehet ilyet csinálni?
Egyébként mihez nem találsz adottságokat?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 20, 18:02
Írta: 000000000 Dátum 2007 január 20, 18:02
Lásd Fórum szabályzat/makrók... ,de azért nem kell tulzásba vinni![#wow1][#circling]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 20, 18:44
Írta: 000000000 Dátum 2007 január 20, 18:44
hát ez őszintén szólva képet akartam csatolni de csak a makróig jutottam:D sajnos nemtudok képet felrakni(valszeg az én hibám) űgíhogy tárgytalan, de amúgy egy epson nyomtattóból kisuedett SANYO DENKI motor lenne
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 20, 19:46
Írta: 000000000 Dátum 2007 január 20, 19:46
na remélem sikerült
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2007 január 20, 19:51
Írta: s5f8tmfv3 Dátum 2007 január 20, 19:51
Az extra tárhelyeden sem látszanak a képek, így itt sem.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 20, 19:51
Írta: 000000000 Dátum 2007 január 20, 19:51
ez biztos?
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2007 január 20, 19:55
Írta: s5f8tmfv3 Dátum 2007 január 20, 19:55
Igen, ha a http://www.angelero.extra.hu/ címről akarsz linkelni, legalábbis nálam nem jönnek be a képek, csak a szöveg.
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2007 január 20, 20:04
Írta: s5f8tmfv3 Dátum 2007 január 20, 20:04
Már műxik!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 20, 20:16
Írta: 000000000 Dátum 2007 január 20, 20:16
Ha a linket megnézed (helyén egy jobb gomb és tulajdonságok) nem képre mutat (csak a szerverre)!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 január 30, 15:05
Írta: 000000000 Dátum 2007 január 30, 15:05
Sziasztok!
Én még kezdő vagyok és van egy Profi 1-es CNC vezérlőm.Sikerült hozzá léptetőmotorokat is szereznem mégpedig 3db TAMAGAWA TS3103N59 es típust.Ennek 5 db kivezetése van de nem tudom hogyan kössem be a vezérlőmhöz.Valamint a motor 24V-os milyen feszültségű táppal célszerű üzemeltetni?
Gyakorlatilag nyák készítésre akarom használni.
Segítségeket várok!Előre is köszönöm!
Én még kezdő vagyok és van egy Profi 1-es CNC vezérlőm.Sikerült hozzá léptetőmotorokat is szereznem mégpedig 3db TAMAGAWA TS3103N59 es típust.Ennek 5 db kivezetése van de nem tudom hogyan kössem be a vezérlőmhöz.Valamint a motor 24V-os milyen feszültségű táppal célszerű üzemeltetni?
Gyakorlatilag nyák készítésre akarom használni.
Segítségeket várok!Előre is köszönöm!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 02, 17:14
Írta: 000000000 Dátum 2007 február 02, 17:14
No erről talán még nem volt szó:
Mégpedig a fogyasztásról!
Adott (tengelyenként) egy nagy teljesítményű vezérlő:
24-90 voltig szereti a kakaót
1.8-8.2 Amperig etethető (RMS 1.29 - 5.86 A)
adott (szintén tengelyenként) nagy teljesítményű léptetőmotor, ami ezeket ki is tudja használni. (papíron 2.9 Amper 4.35 Volt, illetve 3.2 Amper 2.6 Volt)
Tuningerek megadják neki (párhuzamos módban) a vezérlő max amperét meg vagy 70-80 Voltot.
De!!!
Ez rengeteget zabál! Megéri ez???
Annak, aki szeret számolni:
* Min 3 tengely (igaz, álló helyzetben 60%-ra esik az áram, de 3d marásról van szó, úgyhogy ez max. 1 tengelyen érvényesül)
* Lesz még további 3 tengely is! 4. 5. 6.
A fogyasztás itt már Kw/h fölötti és akkor még hol van még a maró motor...
Mert ugyebár a léptecs állandóan zabál, szemben a szervókkal.
Nem okosabb pl. egy kisebb feszültség választása? És talán még életben is maradunk, ha elkap. Ha jól sejtem, a nyomaték csökkenés azért messze nem arányos a fesz csökkentésével (egyik sebességtartományban sem) , az életben maradással meg pláne!!! A fogyasztás viszont egyértelműen arányos.
Mit szóltok?
Üdv.:
Áron
Mégpedig a fogyasztásról!
Adott (tengelyenként) egy nagy teljesítményű vezérlő:
24-90 voltig szereti a kakaót
1.8-8.2 Amperig etethető (RMS 1.29 - 5.86 A)
adott (szintén tengelyenként) nagy teljesítményű léptetőmotor, ami ezeket ki is tudja használni. (papíron 2.9 Amper 4.35 Volt, illetve 3.2 Amper 2.6 Volt)
Tuningerek megadják neki (párhuzamos módban) a vezérlő max amperét meg vagy 70-80 Voltot.
De!!!
Ez rengeteget zabál! Megéri ez???
Annak, aki szeret számolni:
* Min 3 tengely (igaz, álló helyzetben 60%-ra esik az áram, de 3d marásról van szó, úgyhogy ez max. 1 tengelyen érvényesül)
* Lesz még további 3 tengely is! 4. 5. 6.
A fogyasztás itt már Kw/h fölötti és akkor még hol van még a maró motor...
Mert ugyebár a léptecs állandóan zabál, szemben a szervókkal.
Nem okosabb pl. egy kisebb feszültség választása? És talán még életben is maradunk, ha elkap. Ha jól sejtem, a nyomaték csökkenés azért messze nem arányos a fesz csökkentésével (egyik sebességtartományban sem) , az életben maradással meg pláne!!! A fogyasztás viszont egyértelműen arányos.
Mit szóltok?
Üdv.:
Áron
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 02, 18:39
Írta: 000000000 Dátum 2007 február 02, 18:39
Szerinted a vezérlő 100%-os kitöltési tényezővel hajtatja a motort? NEM, ezért ne aggódj!
A motorod teljesítménye nem nőhet a névleges felé (alapfesz×tekercsáram) mert akkor leégne (ezért van a PWM)!
A motorod teljesítménye nem nőhet a névleges felé (alapfesz×tekercsáram) mert akkor leégne (ezért van a PWM)!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 02, 19:04
Írta: 000000000 Dátum 2007 február 02, 19:04
Köszönöm!
De akkor mennyi lehet a fogyasztás?
Ha növelem a feszt, nem egyenesen arányosan nől a fogyasztás is?
Mert ha a névleges áramokat nézem (ha jól értem ez a motor gyári adata???) akkor nevetségesen alacsony, az erejéhez képest perpetuum mobile.
Tudom, ez alap dolog, de ha tápot méretezek ide , (x VA) mégiscsak kérnem kell egy kivezetett feszültséget, ami minél több Volt, annál kevesebb Amper, és fordítva. Mármost: ha Pl. 1000 VA-es a toroid, az nem azt jelenti, hogy ezt meg is eszi vagy legalább is a felét mindig megeszi, még akkor is, ha minden áll, pontosabban tart?
De akkor mennyi lehet a fogyasztás?
Ha növelem a feszt, nem egyenesen arányosan nől a fogyasztás is?
Mert ha a névleges áramokat nézem (ha jól értem ez a motor gyári adata???) akkor nevetségesen alacsony, az erejéhez képest perpetuum mobile.
Tudom, ez alap dolog, de ha tápot méretezek ide , (x VA) mégiscsak kérnem kell egy kivezetett feszültséget, ami minél több Volt, annál kevesebb Amper, és fordítva. Mármost: ha Pl. 1000 VA-es a toroid, az nem azt jelenti, hogy ezt meg is eszi vagy legalább is a felét mindig megeszi, még akkor is, ha minden áll, pontosabban tart?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 02, 19:10
Írta: 000000000 Dátum 2007 február 02, 19:10
A PWM a magasabb fesen sem enged meg nagyobb teljesítményt (effektíve) kiszedni, ezért az effektív értéke I=P/U, de ez effektív, ami miatt a csúcs az lehet több is! Ezt egy jó kondi kisimítja a trafó felé!
szerintem effektív értékkel simány számolhatsz.
szerintem effektív értékkel simány számolhatsz.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 02, 21:40
Írta: 000000000 Dátum 2007 február 02, 21:40
Summa:
A fogyasztást nem befolyásolja jelentősen a tuning?
A fogyasztást nem befolyásolja jelentősen a tuning?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 02, 21:56
Írta: 000000000 Dátum 2007 február 02, 21:56
1000 VA-es a toroid kb. 720-750W.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 03, 09:14
Írta: 000000000 Dátum 2007 február 03, 09:14
A fogyasztás a teljesítmény szor idő, tehát nem (inkább a munkaóra befolyásolja mert a motor teljesítmény felvétele egy jó vezérlőnél közel állandó, viszont a tuninggal az idő rövidíthető)!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 03, 10:13
Írta: 000000000 Dátum 2007 február 03, 10:13
No lám!
Tehát a tuning tényleg ingyé' van!
S ha 1000 VA a toroid - mert Pl. enyit kér - ami "720-750 W", az nem jelenti azt hogy ez a villanyszámlán is így jelentkezne, a számla nagyságrendel kevesebb.
Megsaccolható, mennyi(W/h)?
Üdv.:
Áron [#lama]
Tehát a tuning tényleg ingyé' van!
S ha 1000 VA a toroid - mert Pl. enyit kér - ami "720-750 W", az nem jelenti azt hogy ez a villanyszámlán is így jelentkezne, a számla nagyságrendel kevesebb.
Megsaccolható, mennyi(W/h)?
Üdv.:
Áron [#lama]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 03, 10:27
Írta: 000000000 Dátum 2007 február 03, 10:27
Hát ha az össz teljesítményed ami kell pl. 1000W, akkor 1h-át használva 1kWh-át fogyasztasz (durván, mert azért itt van még teljesítmény tényező , cosFI, mivel nem tisztán Ohmos as fogyasztásod, sőt!)! Pontosan csak méréssel lehet megmondani mennyi lenne a fogyasztásod, kb. ezzel számolhatsz!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 03, 11:43
Írta: 000000000 Dátum 2007 február 03, 11:43
Tehát mégiscsak jól álltam hozzá a kérdéshez már az elején is!
Ha nem hajszolom a tuningot a végletekig, akkor elég a fele feszültség is. (azért még így is maradna vagy 40 V)
Ha ez elég, akkor a táp fele akkora is lehet (Amper ügye marad) = a példánál maradva 500VA-es a 1000VA helyett
Ez "durván" 0.5 Kwh fogyasztás 1kwh helyett.
A nyomaték ugyanakkor közel sem esett a felére. (ha jól gondolom).
Ergo:
Itt már nem éri meg a tuning, ez havi lebontásban esetleg jelentős különbség a villanyszámlán.
Tudom, sokszor volt téma a tuning határ, de az össz. fogyasztás szempontjából még soha nem tárgyaltuk, pedig belátható, hogy ez nem is lényegtelen: Éves lebontásban egy klassz nyaralás ára is lehet a különbözet!
Ha nem hajszolom a tuningot a végletekig, akkor elég a fele feszültség is. (azért még így is maradna vagy 40 V)
Ha ez elég, akkor a táp fele akkora is lehet (Amper ügye marad) = a példánál maradva 500VA-es a 1000VA helyett
Ez "durván" 0.5 Kwh fogyasztás 1kwh helyett.
A nyomaték ugyanakkor közel sem esett a felére. (ha jól gondolom).
Ergo:
Itt már nem éri meg a tuning, ez havi lebontásban esetleg jelentős különbség a villanyszámlán.
Tudom, sokszor volt téma a tuning határ, de az össz. fogyasztás szempontjából még soha nem tárgyaltuk, pedig belátható, hogy ez nem is lényegtelen: Éves lebontásban egy klassz nyaralás ára is lehet a különbözet!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 03, 12:37
Írta: 000000000 Dátum 2007 február 03, 12:37
Az Amper miért marad? Pont ezt próbálom magyarázni! I=P/U (ha a motor alapból pl. 3.2V és 3A, akor P(inkább S a szakértők kedvéért)=3.2×3=9.6VA, tehát 40V-on is 9.6VA, így az árama (40V-on ) I=P/U, az-az 9.6/40=0.24A)!!!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 04, 06:32
Írta: 000000000 Dátum 2007 február 04, 06:32
Üdvözlök mindenkit érdekelne a léptetö motorok
árai. töb is kellene. email cimem ha8-094@freemail.hu
árai. töb is kellene. email cimem ha8-094@freemail.hu
Cím: Re:Léptetőmotor
Írta: 2nbj3n5m Dátum 2007 február 04, 14:41
Írta: 2nbj3n5m Dátum 2007 február 04, 14:41
Üdvözöllek a forumba! Valamint az irni és olvasni tudok táborába.Ugyan is van baloldalon
egy aranyos kis sorocska melybe zöld szinnel egy
kellemes felirat."CNC Alkatrészek" És képzeld
el hogy alatta, na mivan (helyes válasz esetén)
megdicsérem látásod!!
Öreg nehogy már és olvassam el helyedted azt a
kibaszott sort...!
Üdv.Jankó
egy aranyos kis sorocska melybe zöld szinnel egy
kellemes felirat."CNC Alkatrészek" És képzeld
el hogy alatta, na mivan (helyes válasz esetén)
megdicsérem látásod!!
Öreg nehogy már és olvassam el helyedted azt a
kibaszott sort...!
Üdv.Jankó
Cím: Re:Léptetőmotor
Írta: uzahitefr Dátum 2007 február 04, 14:48
Írta: uzahitefr Dátum 2007 február 04, 14:48
sziasztok teljesen uj vagyok itt. de nagyon érdekel a cnc téma
Cím: Re:Léptetőmotor
Írta: uzahitefr Dátum 2007 február 04, 14:51
Írta: uzahitefr Dátum 2007 február 04, 14:51
valaki tudna segiteni az árakban elöre is kösz
Cím: Re:Léptetőmotor
Írta: uzahitefr Dátum 2007 február 04, 14:59
Írta: uzahitefr Dátum 2007 február 04, 14:59
szeretnék összeépiteni egy cnc marogépet fémre vagy a meglévő mu 250 est átalakitani
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 05, 00:06
Írta: 000000000 Dátum 2007 február 05, 00:06
... hát ez nagyon kemény volt! Szerintem nem mindenki jártas annyira ezen az oldalon és megtorténhet, hogy hamarább ír, mint gondolkozik!
Esetleg ITT az árlista.[#eljen]
Esetleg ITT az árlista.[#eljen]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 05, 11:48
Írta: 000000000 Dátum 2007 február 05, 11:48
Rendben! Köszönöm.
Látszik, hogy nagyon láma vagyok az elektronikához, de végül is én csak végfelhasználó lennék... (Nem tudom hogy csinálják a sört, de inni tudok! [#pias])
Tudod én abból indultam ki (művészetfilozófusként), hogy a toroid még akkor is fogyaszt - a puszta tekercs ellenállásból fakadóan - ha az ég egy adta világon semmi sincs rákötve a másik oldalon...
Láma szemem láma szemem sötétkék... ;-)
Áron
Látszik, hogy nagyon láma vagyok az elektronikához, de végül is én csak végfelhasználó lennék... (Nem tudom hogy csinálják a sört, de inni tudok! [#pias])
Tudod én abból indultam ki (művészetfilozófusként), hogy a toroid még akkor is fogyaszt - a puszta tekercs ellenállásból fakadóan - ha az ég egy adta világon semmi sincs rákötve a másik oldalon...
Láma szemem láma szemem sötétkék... ;-)
Áron
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 05, 12:53
Írta: 000000000 Dátum 2007 február 05, 12:53
Egyébként jól tudod, a toroid akkor is fogyaszt amikor nincs rákötve semmi (üresjárási veszteségeket kell fedeznie a hálózatból)! Csak persze kicsit..
Cím: Re:Léptetőmotor
Írta: uzahitefr Dátum 2007 február 05, 19:26
Írta: uzahitefr Dátum 2007 február 05, 19:26
ki tudna segiteni? h1 vezérlö mkekkora motort bir el max? 3 tengelyre köszi
Cím: Re:Léptetőmotor
Írta: uzahitefr Dátum 2007 február 05, 19:26
Írta: uzahitefr Dátum 2007 február 05, 19:26
ki tudna segiteni? h1 vezérlö mkekkora motort bir el max? 3 tengelyre köszi
Cím: Re:Léptetőmotor
Írta: uzahitefr Dátum 2007 február 05, 19:29
Írta: uzahitefr Dátum 2007 február 05, 19:29
ki tudna segiteni? h1 vezérlö mkekkora motort bir el max? 3 tengelyre köszi
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 05, 19:42
Írta: 000000000 Dátum 2007 február 05, 19:42
Itt találod a leirást a H1 vezérőkről ha elolvasod minden kiderül.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 05, 19:45
Írta: 000000000 Dátum 2007 február 05, 19:45
Vagyis itt![#eplus2]
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2007 február 05, 19:46
Írta: e3h0cv4ph Dátum 2007 február 05, 19:46
Csatlakoznák a témához. Szerintem a tunningot ne úgy állítsd be, hogy a legkedvezőbb fogyasztást érd el, hanem úgy, hogy frankón menjen a géped. A felvett teljesítménybe ez nem vagy csak egy nagyon picit számít bele. Üdv.
Cím: Re:Léptetőmotor
Írta: uzahitefr Dátum 2007 február 05, 20:14
Írta: uzahitefr Dátum 2007 február 05, 20:14
köszi. egyenlöre csak tanulmányozom a dolgokat mielött bármit is vásárolnék.
Cím: Re:Léptetőmotor
Írta: uzahitefr Dátum 2007 február 05, 20:22
Írta: uzahitefr Dátum 2007 február 05, 20:22
a gép öszeálitásával nem lesz gondom minden feltétel meg van hozzá . inkább a vezérlési dolgok ami gondot okozhat, köszi mindenki segitségét!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 08, 17:45
Írta: 000000000 Dátum 2007 február 08, 17:45
Ritkán látni így egyben a "kicsiket" és a nagyokat:

A legnagyobb léptetőmotor 12Nm-es! Nehéz mint a dög!
A legnagyobb léptetőmotor 12Nm-es! Nehéz mint a dög!
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2007 február 08, 20:29
Írta: Kristály Árpád Dátum 2007 február 08, 20:29
Hallihó!
Dicsekszel, vagy panaszkodsz?
Mekkora a "Góliátok" felvétele s egyébb paraméterek?
Dicsekszel, vagy panaszkodsz?
Mekkora a "Góliátok" felvétele s egyébb paraméterek?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 09, 07:16
Írta: 000000000 Dátum 2007 február 09, 07:16
Érdekességnek szántam! Ekkora motorokat én sem mindennap látok élőben!
Nyomaték: 12 Nm
Névleges áram: 2.9 A
Tekercs ellenállás: 1.5 Ohm
Alap feszültség: 4.35 V
Induktivitás: 9.4 mH
Kivezetések száma: 8
Hossz: 155 mm
Tengelyvégek: 14mm
Súly: 3.4 kg
Nyomaték: 12 Nm
Névleges áram: 2.9 A
Tekercs ellenállás: 1.5 Ohm
Alap feszültség: 4.35 V
Induktivitás: 9.4 mH
Kivezetések száma: 8
Hossz: 155 mm
Tengelyvégek: 14mm
Súly: 3.4 kg
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2007 február 09, 11:21
Írta: Kristály Árpád Dátum 2007 február 09, 11:21
Hallihó!
Egy infó lenaradt!
ÁRA?
Egy infó lenaradt!
ÁRA?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 09, 11:25
Írta: 000000000 Dátum 2007 február 09, 11:25
ára a listában valami 4x ezer
kicsit huzos :)
kicsit huzos :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 09, 12:04
Írta: 000000000 Dátum 2007 február 09, 12:04
Hát igen!
Cím: Re:Léptetőmotor
Írta: vthgizrff Dátum 2007 február 09, 12:10
Írta: vthgizrff Dátum 2007 február 09, 12:10
Szerintem meg baromi olcsó. Egy éve 6x ezer volt a 6Nm-es
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 09, 18:26
Írta: 000000000 Dátum 2007 február 09, 18:26
Ahoi,
irtátok hogy egy léptetö motor max fordulatszama 1000 körül van.
Igy egy 20x4 es trapézmenettel max 2000mm7min es meg gyorsjárat érhetö el ha jol gonolom(feles átétellel).
Kérdésem az lenne hogy egy hobby cnc gépnek milyen gyorsjárata szokott lenni?
Nem lassu ez egy kicsit?
irtátok hogy egy léptetö motor max fordulatszama 1000 körül van.
Igy egy 20x4 es trapézmenettel max 2000mm7min es meg gyorsjárat érhetö el ha jol gonolom(feles átétellel).
Kérdésem az lenne hogy egy hobby cnc gépnek milyen gyorsjárata szokott lenni?
Nem lassu ez egy kicsit?
Cím: Re:Léptetőmotor
Írta: ybm4ifb Dátum 2007 február 09, 22:13
Írta: ybm4ifb Dátum 2007 február 09, 22:13
Sziasztok
Kérdésem lenne ,5 fázisu léptető motorom van 3db mivel tudnám öket vezérelni??? és ha van rá vezérlő,az mibe kerülne?
Segítsetek!!
Üdv:stojka
Kérdésem lenne ,5 fázisu léptető motorom van 3db mivel tudnám öket vezérelni??? és ha van rá vezérlő,az mibe kerülne?
Segítsetek!!
Üdv:stojka
Cím: Re:Léptetőmotor
Írta: ybm4ifb Dátum 2007 február 09, 22:19
Írta: ybm4ifb Dátum 2007 február 09, 22:19
A tipusa VEXTA A3530-9215 5 kivezetése van.
Érdekel valakít vákum szivattyu??
Érdekel valakít vákum szivattyu??
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 10, 07:37
Írta: 000000000 Dátum 2007 február 10, 07:37
Az 5 kivezetéses szerintem nem 5 fázisú (ahhoz minimum 6 kivezetés kellene)! Az 5 kivezetéses szerintem sima 2 fázisú, unipoláris motor, ezért pl. a H1 is jó hozzá! Olvasd át a Léptetőmotorokat v. a H1 leírását (benne van az 5 kivezetéses motorok is)!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 10, 08:25
Írta: 000000000 Dátum 2007 február 10, 08:25
látom az elözö kérdésem nem nyerte el a teccéseteket :(
nem baj van másik:
Hogy tudnám azt kiszámolni hogy az én gépemhez milyen minimális nyomatéku motor kellene ahhoz hogy viszoylag jo gyorsulása is legyen a masinának?
nem baj van másik:
Hogy tudnám azt kiszámolni hogy az én gépemhez milyen minimális nyomatéku motor kellene ahhoz hogy viszoylag jo gyorsulása is legyen a masinának?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 10, 10:16
Írta: 000000000 Dátum 2007 február 10, 10:16
Kedves Gergő!
Légyszives olvasd végig ezt fejezetet és a mechanikai ötletekek az elejétől kezdve!
Le van írva, ötletekkel fűszerezve.
Üdv balkari
Légyszives olvasd végig ezt fejezetet és a mechanikai ötletekek az elejétől kezdve!
Le van írva, ötletekkel fűszerezve.
Üdv balkari
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 10, 10:39
Írta: 000000000 Dátum 2007 február 10, 10:39
Még valami, kicsit konkrétabb dolog jutott eszembe.
Adott a mechanikád - ennek van tömege, súrlódási tényezője, tehetsz rá áttételt és ebből számolgathatsz, egy kis fizika és mechanikai képletek alkalmazásával. Szerintem keress egy olyan segítőt pl.(Tibor45) akinek szakmája, és hajlandó is segíteni. De konkrét dolgokra és számokra, lesz szüksége. A feltett kérdésed nagyon általános és ezáltal igen bonyolult! Szerintem.
Üdv balkari
Adott a mechanikád - ennek van tömege, súrlódási tényezője, tehetsz rá áttételt és ebből számolgathatsz, egy kis fizika és mechanikai képletek alkalmazásával. Szerintem keress egy olyan segítőt pl.(Tibor45) akinek szakmája, és hajlandó is segíteni. De konkrét dolgokra és számokra, lesz szüksége. A feltett kérdésed nagyon általános és ezáltal igen bonyolult! Szerintem.
Üdv balkari
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2007 február 10, 12:57
Írta: Szalai György Dátum 2007 február 10, 12:57
Stojkának
Az ötfázisú motor ezt a fórumot eddig nem hozta lázba, én próbálkoztam vele, semmi reakció. Agyhalált színleltek. Azért ezt nézd meg, ha már ideraktam, hátha így nem volt hiába.
Filetár/képek/berger1-6jpg
Az ötfázisú motor ezt a fórumot eddig nem hozta lázba, én próbálkoztam vele, semmi reakció. Agyhalált színleltek. Azért ezt nézd meg, ha már ideraktam, hátha így nem volt hiába.
Filetár/képek/berger1-6jpg
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 10, 13:29
Írta: 000000000 Dátum 2007 február 10, 13:29
Sziasztok!
A 2-től eltérő, akárhány fázisú
motorokkal kapcsolatosan fórumon kívül
szívesen segítek bárkinek, sajnos elméleti
probléma, amire persze van gyakorlati megoldás,
de egyesek óhaja miatt az elméletet minél
inkább mellőzni kell, így inkább nem írnék
semmit.
A 2-től eltérő, akárhány fázisú
motorokkal kapcsolatosan fórumon kívül
szívesen segítek bárkinek, sajnos elméleti
probléma, amire persze van gyakorlati megoldás,
de egyesek óhaja miatt az elméletet minél
inkább mellőzni kell, így inkább nem írnék
semmit.
Cím: Re:Léptetőmotor
Írta: ybm4ifb Dátum 2007 február 10, 15:45
Írta: ybm4ifb Dátum 2007 február 10, 15:45
Szevasztok
a File Tárba felraktam képeket,ha lennétek szivessek ránézni...
Az encodert elcserélném valamíre..2db van belőle.
A motorra meg mondjátok meg hány fázisu!
Köszi a segítséget.
stojka
Ui:A 001-est kérném törölni,véletlen került fel..vákum szivattyu adattábla.
a File Tárba felraktam képeket,ha lennétek szivessek ránézni...
Az encodert elcserélném valamíre..2db van belőle.
A motorra meg mondjátok meg hány fázisu!
Köszi a segítséget.
stojka
Ui:A 001-est kérném törölni,véletlen került fel..vákum szivattyu adattábla.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 10, 18:01
Írta: 000000000 Dátum 2007 február 10, 18:01
Rá vam írva 5!!!!!
Cím: Re:Léptetőmotor
Írta: ybm4ifb Dátum 2007 február 10, 18:11
Írta: ybm4ifb Dátum 2007 február 10, 18:11
Szevasz
Oké-oké...csakhogy 5 kivezetése van...
Oké-oké...csakhogy 5 kivezetése van...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 10, 18:18
Írta: 000000000 Dátum 2007 február 10, 18:18
az nem baj.
majd szétnézek és megprobálok valami bekötési rajzot küldeni.
majd szétnézek és megprobálok valami bekötési rajzot küldeni.
Cím: Re:Léptetőmotor
Írta: ybm4ifb Dátum 2007 február 10, 18:32
Írta: ybm4ifb Dátum 2007 február 10, 18:32
Köszi!!!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 10, 18:36
Írta: 000000000 Dátum 2007 február 10, 18:36
Ötfázisú motornak pont elég öt kivezetés. Max tíz lehet, de akkor Neked kellene összekötözgetni. ITT egy pár mondat elmélet.
Más: légyszi' írj magánban néhány mondatot a vákuumszivattyúról. Ennek az adattáblája látható a File tárban? Műszaki állapot, motorral vagy nélküle, ár stb. Kössz!
Más: légyszi' írj magánban néhány mondatot a vákuumszivattyúról. Ennek az adattáblája látható a File tárban? Műszaki állapot, motorral vagy nélküle, ár stb. Kössz!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 10, 19:48
Írta: 000000000 Dátum 2007 február 10, 19:48
Oké végigolvasom!
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2007 február 10, 21:04
Írta: e3h0cv4ph Dátum 2007 február 10, 21:04
Mit ne mondjak szép egy meghajtása van egy ilyen ötfázisú léptecsnek. Motoronként 20 félvezető, az egy 3D gépnél már 60 db félvezető. Megér ennyit ez?
Más. Komoly az a 8 bites abszolut enkóder. Honnan lehet ilyeneket szerezni?
Más. Komoly az a 8 bites abszolut enkóder. Honnan lehet ilyeneket szerezni?
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2007 február 11, 07:55
Írta: Szalai György Dátum 2007 február 11, 07:55
Miből látod a 20 félvezetőt? Tán van egy konkrét kapcsolásod? Sajnos nekem nincs, de persze hogy érdekelne. Szerintem 10 kapcsolóelem (félvezetős) vagyis 5 félhíd kéne hozzá. Neked hova kell a többi? Csak nem rövidre zárnád a kapcsait fékezéskor?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 11, 09:14
Írta: 000000000 Dátum 2007 február 11, 09:14
A #889-ben ajánlottam egy kis elméletet. A 3.34 és 3.35 ábrán ha csak sematikusan is, de jól látható a motoronkénti 20 azaz húsz kapcsolóelem. Kétállású kapcsoló ill. öt teljes híd.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2007 február 11, 12:12
Írta: Szalai György Dátum 2007 február 11, 12:12
Iminek
A #889-ben ajánlott egy kis elmélet 3.34 ábrája 10 kapcsolóelemet rajzol. A 3.35 ábra 10 kivezetésű motort feltételez, nemigen alkalmazható 5 kivezetéses esetében. Vagy rosszul értelmezek valamit.
A #889-ben ajánlott egy kis elmélet 3.34 ábrája 10 kapcsolóelemet rajzol. A 3.35 ábra 10 kivezetésű motort feltételez, nemigen alkalmazható 5 kivezetéses esetében. Vagy rosszul értelmezek valamit.
Cím: Re:Léptetőmotor
Írta: ybm4ifb Dátum 2007 február 11, 17:38
Írta: ybm4ifb Dátum 2007 február 11, 17:38
tatai..
Az encodereket én a vaterán vettem..hát nem érdekes..egy voltt Tataitol...
Az encodereket én a vaterán vettem..hát nem érdekes..egy voltt Tataitol...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 11, 22:40
Írta: 000000000 Dátum 2007 február 11, 22:40
http://www.cncszerviz.hu/tudas_lepteto.php
Itt mindent megtalálsz.
Itt mindent megtalálsz.
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2007 február 11, 23:54
Írta: e3h0cv4ph Dátum 2007 február 11, 23:54
Azt hiszem igaza van Szalai Györgynek a 3.34-ben az ötkivezetéses 5 fázisú motort tényleg fele ennyi félvezetővel lehet üzemeltetni.
Így "csak" 30 db kapcsolóelem szükséges, de a kérdés továbbra is kérdés: Megér ez ennyit? És ha igen mit ad cserébe?
Így "csak" 30 db kapcsolóelem szükséges, de a kérdés továbbra is kérdés: Megér ez ennyit? És ha igen mit ad cserébe?
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2007 február 11, 23:55
Írta: e3h0cv4ph Dátum 2007 február 11, 23:55
balkari -jó a link kössz!
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 február 12, 06:09
Írta: 4mjnxdwuu Dátum 2007 február 12, 06:09
Hali, 0,36°-ot. Egy kicsit precizíósabb hajtásokban láttam, egyenletesebb járás, stb... A legtöbbet berger lahr.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 12, 09:34
Írta: 000000000 Dátum 2007 február 12, 09:34
Kössz "balkari"! Ezzel egy kicsit enyhítetted a tévedésem súlyát, amire Szalai Gy. helyesen rávilágított. Öt kivezetéses motorhoz (és "stojkáé" valóban ilyen) elég a fél hídas vezérlés, de akkor csak egész lépéses üzemmód lehetséges. Tévedni emberi dolog, mondta a sündisznó...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 12, 10:21
Írta: 000000000 Dátum 2007 február 12, 10:21
Köszönöm fiúk a köszönetet, de a linkekben kutatva "bélabá-t" illeti, mert onnan merítettem.
Tanulság, az időben néha vissza kell menni.
Köszi BÉLABÁ
Üdv balkari
Tanulság, az időben néha vissza kell menni.
Köszi BÉLABÁ
Üdv balkari
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 február 12, 11:53
Írta: 4mjnxdwuu Dátum 2007 február 12, 11:53
De ha egész lépésed van akkor van fél is? nem? k..va gyorsan kapcsolgatod két lépés között.
Cím: Re:Léptetőmotor
Írta: ybm4ifb Dátum 2007 február 12, 12:29
Írta: ybm4ifb Dátum 2007 február 12, 12:29
Szevasztok
Én meg köszönöm mindenkinek!!!!
Menyibe kerülne egy vezérlő a 3 motorhoz??,
Ezt most nem tudom kitő kérdezem..
Teszek fel a képtárba egy motorrol képet..hátha valakít érdekel,habár elég nagy dőg...
Én meg köszönöm mindenkinek!!!!
Menyibe kerülne egy vezérlő a 3 motorhoz??,
Ezt most nem tudom kitő kérdezem..
Teszek fel a képtárba egy motorrol képet..hátha valakít érdekel,habár elég nagy dőg...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 12, 12:33
Írta: 000000000 Dátum 2007 február 12, 12:33
Az rezgés! Inkább egyszerre kellene 2 fázist bekapcsolni, az féllépés!
Nekem is van 1 5 fázisú motorom, nem kell valakinek?

De ez 6 kivezetéses!
Nekem is van 1 5 fázisú motorom, nem kell valakinek?
De ez 6 kivezetéses!
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 február 12, 16:11
Írta: 4mjnxdwuu Dátum 2007 február 12, 16:11
Nem feltétlenül, ha elég gyors vagy!!!! A forgórész tehetetlenségénél fogva nem tudja lekövetni. ( nem 2 Khz-re gondoltam )
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 12, 17:40
Írta: 000000000 Dátum 2007 február 12, 17:40
Nekem is van vagy 6db....
Ugyan ez.....
Ugyan ez.....
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 12, 18:44
Írta: 000000000 Dátum 2007 február 12, 18:44
Szerinted nnak mi értelme lenne? Nem egyszerübb simán bekapcsolni (persze szimetrikus PWM-el)!
Ha rángatod akkor remeg!
Ha rángatod akkor remeg!
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 február 12, 20:31
Írta: 4mjnxdwuu Dátum 2007 február 12, 20:31
"Ha rángatod akkor remeg!"
Szerintem alapvetően külömböznek az elméleteink. /Műhelytitok de pl használtam olyan saját vezérlőt ami az egyik lépésből a másikba úgy állt át, hogy 10 ütemből az egyiket egyre többször a másikat egyre kevesebbszer kapcsolta be, ( + még az időkkel is játszott ) Ja rezonancia csökkentésre használtam.
Gönyörűen átkúszott az egyik lépésről a másikra, És a H1 szerű vezérlőm is így tudott negyed lépést, a 8-ad már nem volt ok, lassú a pic, illetve nagyok a mociaim induktivitásai.
Szerintem alapvetően külömböznek az elméleteink. /Műhelytitok de pl használtam olyan saját vezérlőt ami az egyik lépésből a másikba úgy állt át, hogy 10 ütemből az egyiket egyre többször a másikat egyre kevesebbszer kapcsolta be, ( + még az időkkel is játszott ) Ja rezonancia csökkentésre használtam.
Gönyörűen átkúszott az egyik lépésről a másikra, És a H1 szerű vezérlőm is így tudott negyed lépést, a 8-ad már nem volt ok, lassú a pic, illetve nagyok a mociaim induktivitásai.
Cím: Re:Léptetőmotor
Írta: ybm4ifb Dátum 2007 február 12, 21:30
Írta: ybm4ifb Dátum 2007 február 12, 21:30
Szoval..ha már megvan ez a 3db 5fázisu motorom (amikrül csupa jót olvastam)szeretném is használni öket..kerül-amibe kerül..
Tudna hozzá valaki vezérlőt készíteni??
Tudna hozzá valaki vezérlőt készíteni??
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 13, 07:34
Írta: 000000000 Dátum 2007 február 13, 07:34
Ezen már régen én is agyaltam, de féltem, hogy a PWM moduláció bekavar és a PIC túl lassú lesz a nagyobb sebességek eléréséhez.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2007 február 13, 09:29
Írta: Szalai György Dátum 2007 február 13, 09:29
Egy ilyen hobby ötfázisú vezérlőre én is vevő volnék, ha tudna vagy 10A fázisáramot. Ennyi kell a motoromnak. (Vagy eladnám a mocit.) A 0,72 fok lépésszögnél szerintetek, kell még a féllépéses üzemmód?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 13, 10:06
Írta: 000000000 Dátum 2007 február 13, 10:06
Kell!
3D- marásnál
3D- marásnál
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2007 február 13, 12:17
Írta: svejk Dátum 2007 február 13, 12:17
Sziasztok!
Szalai, Stojka egyforma a motorjaitok?
Mennyi van? Mit kértek értük?
Írjatok már magánba légyszi.
Szalai, Stojka egyforma a motorjaitok?
Mennyi van? Mit kértek értük?
Írjatok már magánba légyszi.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2007 február 14, 09:20
Írta: Szalai György Dátum 2007 február 14, 09:20
Nekem csak egy darab ötfázisú szörnyetegem van, az is véletlen. Nem tudtam akkor még, hogy milyen motor ez, de az encodere miatt semmiképp sem hagyhattam ott. Képeket találsz róla a filetár képek bergerlahr alatt. A cserebere rovatban is van róla infó valahol a multban.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 14, 18:37
Írta: 000000000 Dátum 2007 február 14, 18:37
Ha már így készleten vannak, had szabadjon kérnem a 6.4Nm-esekehez egy PWM töltetet (profi1-hez)! Megoldható, ugye? (:
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 14, 18:55
Írta: 000000000 Dátum 2007 február 14, 18:55
Most nincs készleten, csak megrendelésre jönnek (ami volt már elvitték)![#nemtudom]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 19, 18:08
Írta: 000000000 Dátum 2007 február 19, 18:08
[#felkialtas]Végkiárúsítás miatt, a bontott léptetőmotorokat min. 3db vásárlása esetén 1000 Ft/db áron lehet most megrendelni! Amíg a készlettart!
Nem lesz folytatása!
Nem lesz folytatása!
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2007 február 19, 19:58
Írta: Egyújabbgépépítő Dátum 2007 február 19, 19:58
A képek alatt található darabszámok aktuálisak? Milyen nyomatékkal rendelkeznek (csak közelítőleg)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 19, 20:36
Írta: 000000000 Dátum 2007 február 19, 20:36
Üdv. Egy hozzáértőtől szeretném kérdezni, ha a léptetőmotor adatai:U 40 volt I 1.6A R 3.5(BERGER LAHR 268/50 L8A) , 3DB. Akkor ehhez mekkora tápegységet érdemes építeni?
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2007 február 19, 21:00
Írta: s5f8tmfv3 Dátum 2007 február 19, 21:00
A P1 paneleket és PIC-eket nem akarod kipucolni a fiókból? [#papakacsint]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 19, 21:04
Írta: 000000000 Dátum 2007 február 19, 21:04
Szia Árpád!
A 40 Voltos fesz őrült soknak tűnik! 64 WATT egyenáramú teljesítmény igen "derék" lenne egy léptecstől. Nem írtál véletlenül egy nullát a 4-es után. Mérd meg egy tekercs (fázis) ellenállatát. Azt megszorozva az árammal (1.6A) kijön a körülbelüli feszültség. Olvass utána, hogy a Te vezérlőd csúcsban mit visel el. Használd a megengedett legnagyobb feszt. Azonban bizonyos vezérlőtipusok (pl. PROFI1) korlátot szabnak a feszültségtöbbszörözésnek is. Tapasztalatom szerint pl. a PROFI1 már nem működik jól 5.5 szörösnél magasabb feszültséggel Én annál a 3.2 Voltos motorjaimat kb. 17.5 Voltal hajtom. Utána halál...
A trafónál szerinem a motorok összteljesítményének kb. 5 szörösével számolhatsz. Nálam ez bevált.
A 40 Voltos fesz őrült soknak tűnik! 64 WATT egyenáramú teljesítmény igen "derék" lenne egy léptecstől. Nem írtál véletlenül egy nullát a 4-es után. Mérd meg egy tekercs (fázis) ellenállatát. Azt megszorozva az árammal (1.6A) kijön a körülbelüli feszültség. Olvass utána, hogy a Te vezérlőd csúcsban mit visel el. Használd a megengedett legnagyobb feszt. Azonban bizonyos vezérlőtipusok (pl. PROFI1) korlátot szabnak a feszültségtöbbszörözésnek is. Tapasztalatom szerint pl. a PROFI1 már nem működik jól 5.5 szörösnél magasabb feszültséggel Én annál a 3.2 Voltos motorjaimat kb. 17.5 Voltal hajtom. Utána halál...
A trafónál szerinem a motorok összteljesítményének kb. 5 szörösével számolhatsz. Nálam ez bevált.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 19, 21:10
Írta: 000000000 Dátum 2007 február 19, 21:10
Igazából én sem értem, hogy miért van ráírva a 40 volt. az áramerősség 1,6A az ellenállás 3,5 Ohm a teljesítménye 1,3 Nm. Az adatokból az következne, hogy 5,6 voltos.????
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 19, 21:31
Írta: 000000000 Dátum 2007 február 19, 21:31
Ez már mindjárt más! Szerintem motorod csak 4 Voltos. 3 db ilyen motorhoz 200 wattos toroid 20-24 Volttal kb. OKés.
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2007 február 19, 21:32
Írta: e3h0cv4ph Dátum 2007 február 19, 21:32
Hi. Köss rá két tekercsére 5,6V-ot, ekkor 1,6A-t fog felvenni (esetleg meg is mérheted), és tartsd rajt kb. 1 órán keresztül (folyamatos kontroll alatt).
Ha egy óra múlva langyos kézmeleg a motor (30..40C) akkor ez a fesz jó. Ha tök hideg akkor mehetsz feljebb.
Ha egy óra múlva langyos kézmeleg a motor (30..40C) akkor ez a fesz jó. Ha tök hideg akkor mehetsz feljebb.
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2007 február 19, 21:34
Írta: e3h0cv4ph Dátum 2007 február 19, 21:34
Merkel Géza: Az az ötszörös túlméretezés nem sok egy kicsit? Persze ha sok pénzed van mindent lehet. De szerintem úgy kb.: 1,5 szörös elég.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 19, 21:39
Írta: 000000000 Dátum 2007 február 19, 21:39
Ez rendben. Kértem a Berger Lahr képviselettől leírást. Rendesek voltak és küldtek. A nyomaték ábrán a feszültséget 40 volt és ott jelzi a max nyomatékot.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 19, 21:40
Írta: 000000000 Dátum 2007 február 19, 21:40
Elküldhetem a leírást?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 19, 22:21
Írta: 000000000 Dátum 2007 február 19, 22:21
Az én mailcímem arpad_t@freemail.hu Küldjön egy mail hogy átküldhessem.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 19, 22:31
Írta: 000000000 Dátum 2007 február 19, 22:31
A chopper-es vezerleshez tartozhat az a 40 Volt...szerintem.
Nalam az 1,6 Voltos motorok kapnak 35 Volt korul
amit aztan a chopper aram kontrolja alapjan kapcsolgat a vezerlo.
A vezerlo radobja a 35 Voltot a lepes kezdeten
Ezzel jokora aram indul meg ami, ugye jokora lepteto nyomatekot jelent....
Mivel a nagy tulfesz miatt joval meredekebb lesz a fluxus felepules, mert meredekebben kezd.
Ekozben az aramfigyeles lesi, hogy mikor eri el a nevleges aramot es akkor leveszi a feszultseget, ezzel nyilvan elkezd csokkeni az aram....
Amint a nevleges ala csokkent egy picivel a vezerlo ismet visszaadja a feszultseget.
Igy tartja a nevleges aramot egy egesz pici hullamzassal, ezzel egyben megtartva a nevleges nyomatekot is...
Az eredmeny eroteljes es gyors lepes indulas es utana max. tarto nyomatek.
Raadasul en mindig bipolarisban hajtom a motorokat, az igy elerheto jobb teljesitmeny miatt.
Nalam az 1,6 Voltos motorok kapnak 35 Volt korul
amit aztan a chopper aram kontrolja alapjan kapcsolgat a vezerlo.
A vezerlo radobja a 35 Voltot a lepes kezdeten
Ezzel jokora aram indul meg ami, ugye jokora lepteto nyomatekot jelent....
Mivel a nagy tulfesz miatt joval meredekebb lesz a fluxus felepules, mert meredekebben kezd.
Ekozben az aramfigyeles lesi, hogy mikor eri el a nevleges aramot es akkor leveszi a feszultseget, ezzel nyilvan elkezd csokkeni az aram....
Amint a nevleges ala csokkent egy picivel a vezerlo ismet visszaadja a feszultseget.
Igy tartja a nevleges aramot egy egesz pici hullamzassal, ezzel egyben megtartva a nevleges nyomatekot is...
Az eredmeny eroteljes es gyors lepes indulas es utana max. tarto nyomatek.
Raadasul en mindig bipolarisban hajtom a motorokat, az igy elerheto jobb teljesitmeny miatt.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 20, 06:58
Írta: 000000000 Dátum 2007 február 20, 06:58
Ahogy bírom, frissítem, így kb. reális adb szám! Most percről, percre csökken az akció miatt (már némelyik hiányzik)!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 20, 07:00
Írta: 000000000 Dátum 2007 február 20, 07:00
Azok már rég kipucolódtak![#nevetes1]
Sőt egyet vissza kellet szereznem, hogy szervíz célokra és emlékbe legyen nekem is!
Sőt egyet vissza kellet szereznem, hogy szervíz célokra és emlékbe legyen nekem is!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 20, 07:01
Írta: 000000000 Dátum 2007 február 20, 07:01
A 40V szerintem a max. rákapcsolható Chopperes feszültség (szigetelési fesz). Az alapfeszültsége az amit a kollegák is írtak.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 20, 09:14
Írta: 000000000 Dátum 2007 február 20, 09:14
Ezek szerint akkor a tápegységet méretezhetem 40 volta? Ha az üresjárási fesz felmegy 50 volt fölé az okoz -e problémát egy H1 -es vezérlőnél?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 20, 09:32
Írta: 000000000 Dátum 2007 február 20, 09:32
Lehetőleg ne menj felé (5-10V még nem gond)!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 21, 09:26
Írta: 000000000 Dátum 2007 február 21, 09:26
Jelzem, hogy a 82. 90. 93. számú motorok elkeltek (lap majd frissítve lesz)!
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 február 23, 07:07
Írta: 4mjnxdwuu Dátum 2007 február 23, 07:07
Hali. Valaki tudna segíteni???
Van két unipoláris mocim csak az van ráírva 2,5V.
ez a megcsapolás és az egyik vég közé értendő, vagy az egyik tekercselés két végére???
Köszike.
Van két unipoláris mocim csak az van ráírva 2,5V.
ez a megcsapolás és az egyik vég közé értendő, vagy az egyik tekercselés két végére???
Köszike.
Cím: Re:Léptetőmotor
Írta: hlehel Dátum 2007 február 23, 22:13
Írta: hlehel Dátum 2007 február 23, 22:13
Udv mindenkinek,
En a 6,4 es 12 Nm-es motorokrol erdeklodnek, milyen gyartmanyok, milyen tapasztalataitok es eszreveteleitek vannak veluk kapcsolatban, erdemes-e belejuk fektetni?
En a 6,4 es 12 Nm-es motorokrol erdeklodnek, milyen gyartmanyok, milyen tapasztalataitok es eszreveteleitek vannak veluk kapcsolatban, erdemes-e belejuk fektetni?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 24, 07:40
Írta: 000000000 Dátum 2007 február 24, 07:40
Én eddig úgy tapasztaltam, hogy mindig a legkisebb feszültséget írják rá (tehát unipoláris esetén a közép ás egyik vég között kapcsolhatót).
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 24, 08:01
Írta: 000000000 Dátum 2007 február 24, 08:01
Szerintem Kínai gyártmány. Teljesen korrekt (pláne ha az árrához mérjük)! A nagy vastömeg miatt erősen igényli a feszültség töbletett (viszonylag nagy az induktivitása). A nyomatékához képest nagyon kicsi áramokat igényel, ez jóminőségű belső mágnesre és vasmagra utal. Jó nehéz motorok.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 24, 22:02
Írta: 000000000 Dátum 2007 február 24, 22:02
Nekem 2,8-asok vannak, fél év alatt nem mondhatok rájuk semmi rosszat. Egy hónapja reggeltol estig mennek.
Cím: Re:Léptetőmotor
Írta: hlehel Dátum 2007 február 25, 08:20
Írta: hlehel Dátum 2007 február 25, 08:20
Kosz az infokat. Istvan neked keszleten vannak ezekbol ? Ha nincs akkor mikor lehetne ezekbol egyet egyet beszerezni ?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 február 25, 08:37
Írta: 000000000 Dátum 2007 február 25, 08:37
Csak megrendelésre hozatok és az árlistában jelzett módon/készletből! Kb. 1 hét kell az átfutáshoz.
Cím: Re:Léptetőmotor
Írta: 2f428kduf Dátum 2007 március 03, 15:00
Írta: 2f428kduf Dátum 2007 március 03, 15:00
Hoppá
Cím: Re:Léptetőmotor
Írta: 2f428kduf Dátum 2007 március 03, 15:11
Írta: 2f428kduf Dátum 2007 március 03, 15:11
Elnézést a bénázásért, amint az Enterhez érek elmegy a szöveg, pedig csak uj sort szerettem volna. Tehát a bánatom: a szerkentyü L297-6203 végfokkal megy,40 V fesszel, de LASSAN. Ha 2000 Hz fölé megyek, a motorok csak berregnek, és megállnak.Ez csak 10 fordulat/sec=10 mm/sec. A fórumon láttam gyorsabb gépeket, pedig áttéttel hajtották az orsókat. A gépecskét (ugy A4-et fed le)próbára szántam, hát zátonyra futottam. Segitsetek: HOLAHIBA
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 március 03, 16:20
Írta: 000000000 Dátum 2007 március 03, 16:20
Szia!
Ez nagyjából a léptető motorod végső
képessége, sokkal jobb nem nagyon tud lenni
lépéstévesztés nélkül. Ha gyorsabb akarsz
lenni, sajna szervóra kell áttérned.
Persze még pár dologgal próbálkozhatsz,
pl. kösd be őket bipol, és párhuzamos tekercsekkel. Ilyenkor a legdinamikusabbak.
Ez nagyjából a léptető motorod végső
képessége, sokkal jobb nem nagyon tud lenni
lépéstévesztés nélkül. Ha gyorsabb akarsz
lenni, sajna szervóra kell áttérned.
Persze még pár dologgal próbálkozhatsz,
pl. kösd be őket bipol, és párhuzamos tekercsekkel. Ilyenkor a legdinamikusabbak.
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 március 03, 20:44
Írta: 4mjnxdwuu Dátum 2007 március 03, 20:44
Üdv, szerintem ha a motor 5V alatti akkor ott még "épp hogy elkezd" legörbülni a nyomatéka. ( 600 ford nem nagy . akkor találkoztam ilyennel / sőt kevesebbel ha a moci tekercseit közvetlen visszáram diódáztam.)
/kb 1 hete játszottam gyári JAPAN SERVO bipol vezérlővel, bármilyen mocit tettem rá 4V alattit csak 40V tápról min 3000ford/p -ig elment egész lépésben, a legjobbak 1,53V 3A -ek voltak kb 4000 ford-ig birta, de sajnos ott kellet volna dekádot váltani a freki generátoron. De majd a melóhelyen letesztelem 80V-ről normális generátorral( ja nyomaték, gondoltam semmi ereje nincs már itt /régebbi tapasztalat, hozzáér az ember és megáll/ De ez nem,! úgy beleégett a kezembe a műanyag fogaskerék...
/kb 1 hete játszottam gyári JAPAN SERVO bipol vezérlővel, bármilyen mocit tettem rá 4V alattit csak 40V tápról min 3000ford/p -ig elment egész lépésben, a legjobbak 1,53V 3A -ek voltak kb 4000 ford-ig birta, de sajnos ott kellet volna dekádot váltani a freki generátoron. De majd a melóhelyen letesztelem 80V-ről normális generátorral( ja nyomaték, gondoltam semmi ereje nincs már itt /régebbi tapasztalat, hozzáér az ember és megáll/ De ez nem,! úgy beleégett a kezembe a műanyag fogaskerék...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 március 03, 21:02
Írta: 000000000 Dátum 2007 március 03, 21:02
Szia! Persze...., minden lehetséges, én egy
átlag értéket mondtam, ahol még nyomaték is van
nagy megbízhatósággal átlag step motor esetében.
átlag értéket mondtam, ahol még nyomaték is van
nagy megbízhatósággal átlag step motor esetében.
Cím: Re:Léptetőmotor
Írta: 2f428kduf Dátum 2007 március 04, 16:54
Írta: 2f428kduf Dátum 2007 március 04, 16:54
A 6203-as Ic tranzisztorai eleve át vannak kötve egy- egy diódával. Vajon ezek, mivel tovább tartják az áramot a fesz lekapcsolása után, lassitják az egész kütyüt?? Amelyik vég-IC-ben nincs dióda, azt kivülről ajánlja a gyári aplikáció hozzátenni. A werket, micsoda önteltség, már készre szereltem, most kiemeltem egyet, hogy könyebben zaklassam. A figyelő-ellenállást kicseréltam kisebbre, igy egy Sanyo-denki gyártmányt járattam, ugy 2 Amperrel. A kicsi (135 mA) és a nagy 2A, ugyanott kezd rosszalkodni. Vajon a vágfokot kezdjem turkálni, bár az ugy van ahogy agyártó ajánlotta. Még megnézem az opto leválasztó nem butul-e a magasabb frekin. Gyanus, hogy két, enyire különböző motor ugyanott torpan meg.A motorokat, sajna nem találtam a cég honlapján, elképzelhető, speciális gyártmány: nagy másoló-gépekből szereltem ki. Ránézvést nagyon hasonlít több gép motorjaira.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2007 március 04, 17:29
Írta: Szalai György Dátum 2007 március 04, 17:29
Szia Trapista!
-akkor találkoztam ilyennel / sőt kevesebbel ha a moci tekercseit közvetlen visszáram diódáztam-
Hoppá. Hogy is van ez? Nem minden vezérlő közvetlen visszáram diódázott? Ha nem akkor hogyan? Talán a diódákkal sorba kötsz valamit?
Nekem érdekes lenne, ha írnál erről egy kicsit többet. Esetleg tennél ide valami skiccfélét, hogy megérthessem mire gondoltál.
Köszönöm.
-akkor találkoztam ilyennel / sőt kevesebbel ha a moci tekercseit közvetlen visszáram diódáztam-
Hoppá. Hogy is van ez? Nem minden vezérlő közvetlen visszáram diódázott? Ha nem akkor hogyan? Talán a diódákkal sorba kötsz valamit?
Nekem érdekes lenne, ha írnál erről egy kicsit többet. Esetleg tennél ide valami skiccfélét, hogy megérthessem mire gondoltál.
Köszönöm.
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 március 04, 22:08
Írta: 4mjnxdwuu Dátum 2007 március 04, 22:08
Szupresszorral teret hagyhatsz az induktív lökéseknek, de a végfok max fesz és a vezérlő fesz átlagértékére ajánlom a választást. ( ha belefér akkor inkább a tápfesz kétszeresére / csak azt fogja meg ami már tényleg káros a meghajtó fokozatra, vagy a motor átütési szilárdságára) A közvetlen dióda akadályozza a mező gyors összeomlását, nagyobb frekin, lehet hogy a vezérlő fesz már 2 tekerccsel arrébb jár, de a mező még mindíg ott van. /1-2 whisky után vagyok - kérdezd a témában Tibor45-öt/ha ajánlhatom/ Ő jobban vágja a témát. többfélét készített már. [#vigyor2][#wave][#vigyor2]
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 március 04, 22:09
Írta: 4mjnxdwuu Dátum 2007 március 04, 22:09
Ja a vezérlő fesz-t az a vezérlő motor fesze akart lenni.[#integet2]
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2007 március 05, 06:28
Írta: Szalai György Dátum 2007 március 05, 06:28
Köszönöm. Egészségedre.
Azt hiszem kezdek már érteni valamit.
Tibor!
Tudnál irni hozzászólást?
Esetleg egy kapcsolás részletet.
Köszönöm.
Azt hiszem kezdek már érteni valamit.
Tibor!
Tudnál irni hozzászólást?
Esetleg egy kapcsolás részletet.
Köszönöm.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 március 05, 08:23
Írta: 000000000 Dátum 2007 március 05, 08:23
Sziasztok! Ez a viszáram diódázás összetett
dolog. Sok minden függ: a hajtásmódtól,
bipoláris vagy unipoláris-e a vezérlő.
A másik fő kérdés: képes-e a végfok pozitív
és negatív áramok kezelésére, vagy csak
egyirányú. Ezeket kellene elsőként megnézni.
Valamint egy szkóppal megnézni a jelalakot,
amikor a jelenség bekövetkezik, és ezt valóban
az optónál is érdmes tesztelni, lehet, hogy már
ott nem megy át a step jel normálisan.
dolog. Sok minden függ: a hajtásmódtól,
bipoláris vagy unipoláris-e a vezérlő.
A másik fő kérdés: képes-e a végfok pozitív
és negatív áramok kezelésére, vagy csak
egyirányú. Ezeket kellene elsőként megnézni.
Valamint egy szkóppal megnézni a jelalakot,
amikor a jelenség bekövetkezik, és ezt valóban
az optónál is érdmes tesztelni, lehet, hogy már
ott nem megy át a step jel normálisan.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2007 március 05, 17:16
Írta: Szalai György Dátum 2007 március 05, 17:16
Na utána néztem ennek a szupresszor dióda dolognak a NETen. A kígyó meg a farkába harapott. Majdnem én is. Mit hozott a gugli?
Hobby CNC - Fórum Elektronika Léptetőmotorok vezérlőbeálltások 2005.jún.20.19:18 #302
Köszönöm minden világos. Kezdhettem volna ezzel.
Hobby CNC - Fórum Elektronika Léptetőmotorok vezérlőbeálltások 2005.jún.20.19:18 #302
Köszönöm minden világos. Kezdhettem volna ezzel.
Cím: Re:Léptetőmotor
Írta: 3vv2btrhv Dátum 2007 március 05, 18:22
Írta: 3vv2btrhv Dátum 2007 március 05, 18:22
Mégis jo a GOOgle ??
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 március 10, 19:33
Írta: 000000000 Dátum 2007 március 10, 19:33
http://www.cncszerviz.hu/tudas_lepteto.php
Cím: Re:Léptetőmotor
Írta: 5bzs27u7 Dátum 2007 március 11, 09:58
Írta: 5bzs27u7 Dátum 2007 március 11, 09:58
Üdv a csapatnak.
Láttam egy érdekes dolgot 'lehet, hogy csak számomra az'. Van egy gép amin léptetők vannak 0,9 fokos lépéssel, és plussz encóder valami 1000 valahanyas felbontással. Mi a fene lenne ez, én eddig úgy tudtam, hogy szervóknál használnak encódert. Így eggyütt egész furcsa, valaki tud ilyen megoldásról?
Láttam egy érdekes dolgot 'lehet, hogy csak számomra az'. Van egy gép amin léptetők vannak 0,9 fokos lépéssel, és plussz encóder valami 1000 valahanyas felbontással. Mi a fene lenne ez, én eddig úgy tudtam, hogy szervóknál használnak encódert. Így eggyütt egész furcsa, valaki tud ilyen megoldásról?
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2007 március 11, 18:21
Írta: Szalai György Dátum 2007 március 11, 18:21
Megtaláltam a válasz gombot. Már nem hiába keltem fel ma reggel.
Magam is bontottam több olyan berendezést és így szert tettem több olyan léptető motorra, ami gyárilag encoderrel szerelt. Kerestem a választ a kérdésedre, de biztos, hogy rossz helyen, mert eddig nemigen találtam meg. Amire rájöttem az annyi, hogy az encoder fizikai felbontása megegyezik a léptetőmotor felbontásával, vagy egészszámú többszöröse annak.
Létezhet olyan vezérlő, ami a parancsot nem dir/step impulzusok, hanem bináris pozíció értékek formájában kapja. Úgy emlékszem ezen a fórumon szóba került egyszer, hogy van ehhez való szoftver. Akkor pedig vagy a cnc kontroller program kezelheti le az encoder jeleit és számlálhatja előre hátra, meg komparálhatja a kapott pozíció értékkel, vagy maga a motorvezérlő hardver teheti ugyanezt. És itt megállt a tudományom. Kapcsolást még nem láttam effélét, gondolom, ha látnék, sem mennék vele sokra, mert már hardver sem igen létezik szoftver nélkül. (Mindem mikróvezérlős.) Mivel a programozáshoz semmilyen szinten sem konyítok, a 40XXX családból próbáltam összeállítani egy próba áramkört, de lejárt a Multisim9 szimulátorom trial ideje, meg véget ért a betegállományom, igy abbamaradt a tervezgetés is. De azért továbbra is érdekel a téma. Most figyelek mint a. Lukinyúl?
Magam is bontottam több olyan berendezést és így szert tettem több olyan léptető motorra, ami gyárilag encoderrel szerelt. Kerestem a választ a kérdésedre, de biztos, hogy rossz helyen, mert eddig nemigen találtam meg. Amire rájöttem az annyi, hogy az encoder fizikai felbontása megegyezik a léptetőmotor felbontásával, vagy egészszámú többszöröse annak.
Létezhet olyan vezérlő, ami a parancsot nem dir/step impulzusok, hanem bináris pozíció értékek formájában kapja. Úgy emlékszem ezen a fórumon szóba került egyszer, hogy van ehhez való szoftver. Akkor pedig vagy a cnc kontroller program kezelheti le az encoder jeleit és számlálhatja előre hátra, meg komparálhatja a kapott pozíció értékkel, vagy maga a motorvezérlő hardver teheti ugyanezt. És itt megállt a tudományom. Kapcsolást még nem láttam effélét, gondolom, ha látnék, sem mennék vele sokra, mert már hardver sem igen létezik szoftver nélkül. (Mindem mikróvezérlős.) Mivel a programozáshoz semmilyen szinten sem konyítok, a 40XXX családból próbáltam összeállítani egy próba áramkört, de lejárt a Multisim9 szimulátorom trial ideje, meg véget ért a betegállományom, igy abbamaradt a tervezgetés is. De azért továbbra is érdekel a téma. Most figyelek mint a. Lukinyúl?
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2007 március 11, 18:24
Írta: Szalai György Dátum 2007 március 11, 18:24
A válaszgombról még mindég nem tudok valamit, mert nem jön össze úgy mint a többieknek.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 március 11, 18:53
Írta: 000000000 Dátum 2007 március 11, 18:53
A beírás előt klikk (a válasz gombra) és írni![#smile]
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2007 március 11, 19:37
Írta: Szalai György Dátum 2007 március 11, 19:37
Most talán jó lessz.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2007 március 11, 19:38
Írta: Szalai György Dátum 2007 március 11, 19:38
Kiváló! Köszönöm.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 március 11, 20:21
Írta: 000000000 Dátum 2007 március 11, 20:21
ecceru...az encoder alapjan
megallapithato a lepesvesztes tenye
es mindig tudhato a VALOBAN lelepett pozicio
Mas kerdes, hogy az altalanos hobby sw-eknek van-e encoder bemenetuk....
megallapithato a lepesvesztes tenye
es mindig tudhato a VALOBAN lelepett pozicio
Mas kerdes, hogy az altalanos hobby sw-eknek van-e encoder bemenetuk....
Cím: Re:Léptetőmotor
Írta: 3vv2btrhv Dátum 2007 március 12, 18:24
Írta: 3vv2btrhv Dátum 2007 március 12, 18:24
Sziasztok
beirom másodszor hogy látam magyar léptetömotoros gépet ugy megcsinálva mint a szervo !! de akor sem reagált rá senki szerintem most sem fog !! miért van az hogy bizonyos dolgokrol méj a csönd !!
Tibor
beirom másodszor hogy látam magyar léptetömotoros gépet ugy megcsinálva mint a szervo !! de akor sem reagált rá senki szerintem most sem fog !! miért van az hogy bizonyos dolgokrol méj a csönd !!
Tibor
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 március 12, 18:47
Írta: 000000000 Dátum 2007 március 12, 18:47
Ezeknek semmi köze a szervóhoz.
A létetőmotor ugyanis soha nem lesz szervomotor
karakterisztikájú. A szervohajtás pedig szervo
(vagy ilyen jellegű) motor nélkül nem létezik,
mert nincs ami végrehajtsa korrekten, megfelelő
dinamikával a PID szabályzási folyamatokat.
Inkább érdemes úgy hajtani, méretezni a
rendszert, hogy ne legyen lépésvesztés. Ha már
encodert használ valaki a léptetőmotorhoz,
akkor attól olcsóbb, ha szervót használ.
A létetőmotor ugyanis soha nem lesz szervomotor
karakterisztikájú. A szervohajtás pedig szervo
(vagy ilyen jellegű) motor nélkül nem létezik,
mert nincs ami végrehajtsa korrekten, megfelelő
dinamikával a PID szabályzási folyamatokat.
Inkább érdemes úgy hajtani, méretezni a
rendszert, hogy ne legyen lépésvesztés. Ha már
encodert használ valaki a léptetőmotorhoz,
akkor attól olcsóbb, ha szervót használ.
Cím: Re:Léptetőmotor
Írta: 3vv2btrhv Dátum 2007 március 12, 18:58
Írta: 3vv2btrhv Dátum 2007 március 12, 18:58
Szia
Igazad van !
kelene egy korekt összehasonlitás ár oldálárol nézve !!
Tibor
Igazad van !
kelene egy korekt összehasonlitás ár oldálárol nézve !!
Tibor
Cím: Re:Léptetőmotor
Írta: 2f428kduf Dátum 2007 március 12, 19:08
Írta: 2f428kduf Dátum 2007 március 12, 19:08
Tisztelt Uraim A 4-töl eltelt idő a studirozással telt, Ennek eredménye: egy impulzus adó (40106 alapon) és egy kis freki-mérő. Ezzel a kütyüvel zaklathattam az L297-2x L6203 végfokot. A zaklatás vége az lett, hogy bebizonyosodott, az Ic-k füstel mennek, mert miután kijött belőle (mármint a füst) nem ment tovább. Már előtte is sántított: nem volt a két 6203-as szimetrikus, sántított. Most már nem. Másik végfok ki: zaklatás, minden megy. De !! Több motorral próbálkoztam, kisebbel nagyobbal, mindegyik 200 lépésford, mindegyiknél jelentkezett egy dolog: alacsony frekin, 200 Hz alatt, egy bizonyos tartományban a motorok nem forogtak, hanem morgolódva, akadozva ide oda mocorgott, Pl Sanyo-Denki tip:103H7126-1941 motor ezt mutatta: 132 Hz forog, 136-152 Hz- akadozik, 156 Hz-től 4200-ig simán fut. Más motorok, hasonlóan alacsony frekin, de máshol akadoznak. Ha a motor-áramot állítottam, kicsit odébb (néhány Hz) ujfent ugyanez. A használni kivánt progi-PCNC tud olyat, hogy 0-tól futtatja fel a frekit, de ha átmegy ezen a sávon, biztos a lépéshiba. MI lehet a megoldás. A véfok rémes elektromos zajokat kelt, még a közvetlenűl rajta lévő 10000mikros kondi ellenére is, a bejövő áram is olyan "szőrös" mint a mérges macska ferka
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2007 március 12, 19:34
Írta: svejk Dátum 2007 március 12, 19:34
A motoroknak ott van a rezonancia frekijük.
Féllépésesben nem annyira jelentkezik.
Megfelelő nyák-topológia.
referencia fesz .szűrés.
illetve az L297 áramérzékelő lábaihoz RC-tag ,de csak módjával!!
Féllépésesben nem annyira jelentkezik.
Megfelelő nyák-topológia.
referencia fesz .szűrés.
illetve az L297 áramérzékelő lábaihoz RC-tag ,de csak módjával!!
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 március 13, 00:27
Írta: 4mjnxdwuu Dátum 2007 március 13, 00:27
Hali. próbáld ki, hogy kézzel kicsit rányomsz a tengelyre és nem fog rágatózni!!!!!!!!!
Ha nem spéci golyós orsót hajtasz vele, kis mozgatott tömeggel nem lesz probléma.
Ha nem spéci golyós orsót hajtasz vele, kis mozgatott tömeggel nem lesz probléma.
Cím: Re:Léptetőmotor
Írta: 2f428kduf Dátum 2007 március 13, 21:10
Írta: 2f428kduf Dátum 2007 március 13, 21:10
Barátaim az Urban (Svejk és Trappista)
Valóban, ha egy kicsit fékeztem ujjal, a motor simán forgott. Az L297 V-ref lábain már láttam egy kis szűrő tagot: 4-5 Kohm és 200pF. Sajnos ezt csak az ujabb végfokban tudom használni, emezek már készek.
Valóban, ha egy kicsit fékeztem ujjal, a motor simán forgott. Az L297 V-ref lábain már láttam egy kis szűrő tagot: 4-5 Kohm és 200pF. Sajnos ezt csak az ujabb végfokban tudom használni, emezek már készek.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2007 március 22, 16:09
Írta: Szalai György Dátum 2007 március 22, 16:09
Szerbusztok!
Látott már valaki olyat, hogy léptetőmotoron lendkerék legyen?
Ez meg mire lehet jó?
Felesleges terhet cipelni gyárilag.
Alacsony fordulaton úgyis kicsi a lendület, magasat meg nem tud a motor.
A fordulatszám stabilan tartására sem ez a jó módszer egy elektrónikusan vezérelt motor esetében. Vagy igen?
Mi a véleményetek?
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2007 március 22, 16:12
Írta: Szalai György Dátum 2007 március 22, 16:12
Hát a cimet beillesztenem most sem sikerült.
http://www.vatera.hu/item/view/index.php?cod=21602593
http://www.vatera.hu/item/view/index.php?cod=21602593
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 március 22, 17:10
Írta: bmejdz9nu Dátum 2007 március 22, 17:10
Szerintem valami kiüregelt tekerő lehet...
http://img.vatera.hu/photos/221928/big/small_1e8b217a0.jpg

http://img.vatera.hu/photos/221928/big/small_1e8b217a0.jpg
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 március 22, 17:15
Írta: bmejdz9nu Dátum 2007 március 22, 17:15
Én mindíg így linkelek képet:
Jobb egérgomb - tulajdoságok - cím - Ctr+C (vágólap) - új ablak nyitása - Ctr+V - megnyítom a böngészőben kontroll céljából...
Aztán a fórumba bele... ez már csak 5 mp nekem...
(Hátha "hotlink tiltás van a szerveren...)
... és ha a dumát megírtam a "mehet" gomb előtt szintén vágólapra teszem mert néha elugrik... és így nem volt hiábavaló az irogatás...
Jobb egérgomb - tulajdoságok - cím - Ctr+C (vágólap) - új ablak nyitása - Ctr+V - megnyítom a böngészőben kontroll céljából...
Aztán a fórumba bele... ez már csak 5 mp nekem...
(Hátha "hotlink tiltás van a szerveren...)
... és ha a dumát megírtam a "mehet" gomb előtt szintén vágólapra teszem mert néha elugrik... és így nem volt hiábavaló az irogatás...
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2007 március 22, 17:37
Írta: Szalai György Dátum 2007 március 22, 17:37
Köszi, legközelebb újra próbálom.
Pedig én is vágólapon keresztül másoltam ide.
De ez mentegetőzés.
Pedig én is vágólapon keresztül másoltam ide.
De ez mentegetőzés.
Cím: Re:Léptetőmotor
Írta: 2f428kduf Dátum 2007 március 22, 18:17
Írta: 2f428kduf Dátum 2007 március 22, 18:17
Hajszoltam a gyorsabb fordulatot, két végfokom bánja, kijött belőlük a büvös füst. Az a kérdésem mindenkihez!! Mekkora fordulatot várhatok a motoroktól, A motorok:a kicsik:KP4M2.203(5v,150 mA), a nagyobbak:Sanyo Denki103H6701,*7126 1941, *7124. 1.2-2.6 és2.7 Amper. ugy 300f/perc-ig tudtam kergetni őket. Keveslem. Várhatok többet, vagy ennyi.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 március 22, 19:56
Írta: 000000000 Dátum 2007 március 22, 19:56
Csak összehasonlítás képp, a H1 25×-ös tuninggal, terheletlen motorral már ment 10E 1/min felett is !!!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 március 23, 00:06
Írta: 000000000 Dátum 2007 március 23, 00:06
Itt nezelodj...
http://www.sanyo-denki.com/Products/Stepping%20Motors/pdf/2step_e1.pdf
http://www.sanyo-denki.com/Products/Stepping%20Motors/pdf/2step_e1.pdf
Cím: Re:Léptetőmotor
Írta: 2f428kduf Dátum 2007 március 23, 21:24
Írta: 2f428kduf Dátum 2007 március 23, 21:24
Meguntam a bűvös füst termelését, és figyelembevéve az uj végfokok anyagárát, a ráfordított időt, ugy vélem olcsóbb, ha veszek egy H1Pcb vezérlőt (121 számut), de nem sikerült a dolog, hiába kattintgattam a megrendelés ablakre. Hogy kell???
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 március 23, 22:16
Írta: 000000000 Dátum 2007 március 23, 22:16
István írta a 25X tuninkot terheletlenül, csak motort tipust sajnos nem írt!!!!!....és még sok mindent nem.....
Te milyen tápfesszel dolgoztál? A motorok ármfelvételével mizújs???? Ha valami füstöl ott enyhén tulterhelés lehetséges, nem??? Vagy???
Üdv balkari
Te milyen tápfesszel dolgoztál? A motorok ármfelvételével mizújs???? Ha valami füstöl ott enyhén tulterhelés lehetséges, nem??? Vagy???
Üdv balkari
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 március 23, 22:18
Írta: 000000000 Dátum 2007 március 23, 22:18
Elnézést gépelés az nállam gyatra.
tuninkot= tuningot
tuninkot= tuningot
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 március 24, 07:31
Írta: 000000000 Dátum 2007 március 24, 07:31
Az egy flash (megrendelésre kattintva kellene egy e-mailt feldobnia és abba kellene írni a kért dolgokat). Ha nem menne (?) akkor elég egy sima e-mail (kézzel)!
Egébként a 10E-es rekordom egy Sanyo Denki 1.1V, 3.4A-es motor 30V-ról hajtva, szignál-generátorral.
Egébként a 10E-es rekordom egy Sanyo Denki 1.1V, 3.4A-es motor 30V-ról hajtva, szignál-generátorral.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2007 március 24, 08:43
Írta: Szalai György Dátum 2007 március 24, 08:43
Jó reggelt!
Volt szupresszor dióda?
Ha igen kb. mekkora feszültségű?
Volt szupresszor dióda?
Ha igen kb. mekkora feszültségű?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 március 24, 09:13
Írta: 000000000 Dátum 2007 március 24, 09:13
Szia István! Gratulálok, de nyilván ez a motor
üresen forgott, és 0 körüli nyomatékot tudna leadni. Számomra csak az a fordulatszám mérvadó,
ahol a motor a tartónyomatékának még az 50-60%-át
leadja. Ez mennyi ezen esetben, ezt is kimérted?
-ét z
kalb
a levegm
üresen forgott, és 0 körüli nyomatékot tudna leadni. Számomra csak az a fordulatszám mérvadó,
ahol a motor a tartónyomatékának még az 50-60%-át
leadja. Ez mennyi ezen esetben, ezt is kimérted?
-ét z
kalb
a levegm
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 március 24, 09:15
Írta: 000000000 Dátum 2007 március 24, 09:15
Bocs, az utolsó 3 sor szöveg hulladékként bent ragadt.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 március 24, 09:56
Írta: 000000000 Dátum 2007 március 24, 09:56
A H1-ben 100V-os a FET supresszora.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 március 24, 10:01
Írta: 000000000 Dátum 2007 március 24, 10:01
Természetesen 0-volt a nyomatéka (terheletlen motor)! Nem mértem a nyomatékot (nem is tudnám mivel), de kézzel megterhelve még 1000-2000 f/min-nél még tisztességes nyomatéka volt. A lényeg a tuning szorzó (minnél nagyobb, annál jobb, csak füstmentes környezetben)!
Ezt a sebességet (10E-est) már csak labor generátorral lehet elérni, olyan stabil jel kell (és persze a Mach eleve lassú hozzá).
Ezt a sebességet (10E-est) már csak labor generátorral lehet elérni, olyan stabil jel kell (és persze a Mach eleve lassú hozzá).
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2007 március 24, 18:10
Írta: Egyújabbgépépítő Dátum 2007 március 24, 18:10
Csak egy kérdés. A 10E fordulathoz ha jól számolom
2 Mhz léptető freki kelett?
2 Mhz léptető freki kelett?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 március 24, 18:13
Írta: 000000000 Dátum 2007 március 24, 18:13
Nem jól számolod.
A H1 Vezérlő féllépéses, a motor amit hajtottam 200-as (1.8°-os), így belőle 400 lépéses jött ki.
10000 f/min = 166.666 f/s.
166.66×400=66.6666 kHz.
A H1 Vezérlő féllépéses, a motor amit hajtottam 200-as (1.8°-os), így belőle 400 lépéses jött ki.
10000 f/min = 166.666 f/s.
166.66×400=66.6666 kHz.
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2007 március 24, 18:19
Írta: Egyújabbgépépítő Dátum 2007 március 24, 18:19
Igaz, elfelejtettem a váltást. Nekem akkor is soknak tűnik ezektől a motoroktól a 10E fordulat. Mérted is?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 március 24, 18:27
Írta: 000000000 Dátum 2007 március 24, 18:27
Nem mértem, csak utána számoltam! Viszonylag lassú ferki emeléssel értem el, nehogy kiessen a szinkronból.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 április 02, 20:08
Írta: 000000000 Dátum 2007 április 02, 20:08
Tisztelt Gépépítők!
Lineáris vezetékek, léptető motorok olcsón eladóak.
Info: url=http://cerampart.uw.hu]CeramPart
Lineáris vezetékek, léptető motorok olcsón eladóak.
Info: url=http://cerampart.uw.hu]CeramPart
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 április 13, 12:47
Írta: 000000000 Dátum 2007 április 13, 12:47
Üdvözlet mindenkinek!
Eladó 2 db NEMA léptetőmotor.
10 mm -es tengely 1,3 Nm-es nyomaték.
Nem voltak használva mert gyengének bizonyultak.
Eladó 2 db NEMA léptetőmotor.
10 mm -es tengely 1,3 Nm-es nyomaték.
Nem voltak használva mert gyengének bizonyultak.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 április 14, 12:10
Írta: 000000000 Dátum 2007 április 14, 12:10
Mennyiert adod a kettot?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 április 15, 22:30
Írta: 000000000 Dátum 2007 április 15, 22:30
Mondjuk 14.000Ft a kettőért és adok egy kuplungot még plusszban.
Cím: Re:Léptetőmotor
Írta: nffab2gnr Dátum 2007 április 15, 23:08
Írta: nffab2gnr Dátum 2007 április 15, 23:08
Szia kezdő v...!
Van a motoroknak pontos tipusa,hogy megnézhessem az adatlapját? Esetleg érdekelne.
Üdv: Tibor
Van a motoroknak pontos tipusa,hogy megnézhessem az adatlapját? Esetleg érdekelne.
Üdv: Tibor
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 április 16, 11:26
Írta: 000000000 Dátum 2007 április 16, 11:26
Max. 10k es nem kell kuplung.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 április 16, 16:46
Írta: 000000000 Dátum 2007 április 16, 16:46
Szia!
A motor típusa NEMA 23SM056-028-8W-xx.xx-1.3
Üdv.:Kezdő versenyző
A motor típusa NEMA 23SM056-028-8W-xx.xx-1.3
Üdv.:Kezdő versenyző
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 április 16, 16:49
Írta: 000000000 Dátum 2007 április 16, 16:49
Helló!
Minimum ár 12.000 Ft. Kuplung nélkül.
Már így is féláron megkapod.
Minimum ár 12.000 Ft. Kuplung nélkül.
Már így is féláron megkapod.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 április 16, 17:21
Írta: 000000000 Dátum 2007 április 16, 17:21
7.100,- Ft (netto) egy 1.3Nm-es a klavio-nal (vadonat uj - ettol fuggetlenul elhiszem, hogy keves uzemorasak). Szoval 10k meg mindig az ajanlatom.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 április 16, 18:20
Írta: bmejdz9nu Dátum 2007 április 16, 18:20
Lehet licitálni is?
Ha lenne kép a motorról - szerintem - lehet, hogy jobban "eladná" magát...
Pl. mekkora a súlya... mert ez sokat elárul...
Ha lenne kép a motorról - szerintem - lehet, hogy jobban "eladná" magát...
Pl. mekkora a súlya... mert ez sokat elárul...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 április 16, 21:41
Írta: 000000000 Dátum 2007 április 16, 21:41
Lehet licitálni?
Természetesen igen!
Típus: 23SM056-028-8W-xx.xx-1.3
Nyomaték: 1.3 Nm
Névleges áram: 1.4 A
Tekercs ellenállás: 1.4 Ohm
Alap feszültség: 1.96 V
Induktivitás: 2.5 mH
Kivezetések száma: 8
Hossz: 56 mm
Tengelyvégek: F10 vagy F10+F10
Súly: 0.71 kg vagy 0.72 kg.
A képet itt is meg lehet találni az oldalon.
A motorok nem mentek 10 percet sem. De nekem gyengék.
Természetesen igen!
Típus: 23SM056-028-8W-xx.xx-1.3
Nyomaték: 1.3 Nm
Névleges áram: 1.4 A
Tekercs ellenállás: 1.4 Ohm
Alap feszültség: 1.96 V
Induktivitás: 2.5 mH
Kivezetések száma: 8
Hossz: 56 mm
Tengelyvégek: F10 vagy F10+F10
Súly: 0.71 kg vagy 0.72 kg.
A képet itt is meg lehet találni az oldalon.
A motorok nem mentek 10 percet sem. De nekem gyengék.
Cím: Re:Léptetőmotor
Írta: 3vv2btrhv Dátum 2007 április 26, 16:16
Írta: 3vv2btrhv Dátum 2007 április 26, 16:16
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 02, 17:19
Írta: bmejdz9nu Dátum 2007 május 02, 17:19
Keresek olyan felhasználót aki bármilyen(!) vezérlővel max. 50V-ról egy Nema34-es motorral el tudott érni 300-as percenkénti fordulatszámot. (Nem nema23 méret! azzal nem gond... akár a duplája sem...)
Ma sok gyakorlott CNC építőt felhívtam, de a problámára ők is csak most jöttek rá... vagy még nem használtak Nema34-es motorokat.
Ma sok gyakorlott CNC építőt felhívtam, de a problámára ők is csak most jöttek rá... vagy még nem használtak Nema34-es motorokat.
Cím: Re:Léptetőmotor
Írta: Robika37 Dátum 2007 május 02, 18:50
Írta: Robika37 Dátum 2007 május 02, 18:50
Hali Péter!
Nékem a 6,4Nm moci megy 1200mmm/min 4-es emelkedésű orsóval.....
Miért?
De én kezdő vagyok ebben a műfajban, ugy hogy okosítsatok ki.
Üdv ! Robika
Nékem a 6,4Nm moci megy 1200mmm/min 4-es emelkedésű orsóval.....
Miért?
De én kezdő vagyok ebben a műfajban, ugy hogy okosítsatok ki.
Üdv ! Robika
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 02, 19:59
Írta: bmejdz9nu Dátum 2007 május 02, 19:59
Tehát 300 fordulat/perc... és megy...
Mekkora tápfesz?
Mekkora tápfesz?
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2007 május 02, 20:13
Írta: Kristály Árpád Dátum 2007 május 02, 20:13
Robika37!
Ha nem titok milyen a vezérlő?
Hallihó!
Ha nem titok milyen a vezérlő?
Hallihó!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 02, 20:22
Írta: bmejdz9nu Dátum 2007 május 02, 20:22
Szerintem ez másodlagos... csodák nincsenek... vagy vannak? Mondjuk arra kiváncsi lennék, hogy bipolárisan vagy unipolárisan megy...?
Nekem 200f/p-nél vége... ez a gondom... egyenlőre...
Nekem 200f/p-nél vége... ez a gondom... egyenlőre...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 02, 20:34
Írta: 000000000 Dátum 2007 május 02, 20:34
Péter!
Ha nem jó paraméterekkel rendelkezik a STEP
motorod, tök mindegy mivel hajtod.
Ez is olyan téma, mint a DC kefés motor
(mennyire szervo jellegű?).
Egyébként a step motoroktól a legjobbaktól se
várjál csodát, egy ilyen nagy nyomatékúnál meg
pláne (nagy a forgórész tehetetlensége, ez eleve halálra ítéli kicsit nagyobb fordulatokon).
Ha nem jó paraméterekkel rendelkezik a STEP
motorod, tök mindegy mivel hajtod.
Ez is olyan téma, mint a DC kefés motor
(mennyire szervo jellegű?).
Egyébként a step motoroktól a legjobbaktól se
várjál csodát, egy ilyen nagy nyomatékúnál meg
pláne (nagy a forgórész tehetetlensége, ez eleve halálra ítéli kicsit nagyobb fordulatokon).
Cím: Re:Léptetőmotor
Írta: Robika37 Dátum 2007 május 02, 20:52
Írta: Robika37 Dátum 2007 május 02, 20:52
24V, unipol. féllépés, vezérlő OFF-os (dubble) persze erő mint a nagymálnában. Gyorsjárati sebesség , faeszterga Z tengely ha 0,2 belül szór a méret az itt nem téma. Csiszolópapír többet lehoz.
Hát megy....
Okosítást kérek ! Mint már régebben említtem, inkább balos kétbekezdésű anyát esztergálok mint az elektronika.....
További szép estét! Robika
Hát megy....
Okosítást kérek ! Mint már régebben említtem, inkább balos kétbekezdésű anyát esztergálok mint az elektronika.....
További szép estét! Robika
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 02, 20:54
Írta: bmejdz9nu Dátum 2007 május 02, 20:54
Tibi teljesen igazad van... csak eddíg ezt miért nem írta senki?
Léptető motorválszték = Mind kinai és adatlap "mentes" termék... nics is választék... vagy van de nem a látókörömben...
Léptető motorválszték = Mind kinai és adatlap "mentes" termék... nics is választék... vagy van de nem a látókörömben...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 02, 20:57
Írta: bmejdz9nu Dátum 2007 május 02, 20:57
Tibi?
Elméletileg lehetséges, hogy az unipoláris motor nagyobb fordulatot tud mint egy bipoláris?
Elméletileg lehetséges, hogy az unipoláris motor nagyobb fordulatot tud mint egy bipoláris?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 02, 21:19
Írta: 000000000 Dátum 2007 május 02, 21:19
van adatlapos is...pl.
www.nanaotec.de
(avagy www.isel.hu, joval dragabban ugyanaz)
www.bibus.hu (Bautz vagy milyen motorok)
www.q-tech.hu (Sanyo-Denki motorok)
A gorbek magukert beszelnek
szamottevo teljesitmeny cirka max. 6kHz-ig
Jomagam tipikusan max. 4Khz-el hajtok fellepesben mindent...ami 600 ford/perc
Szerintem 300 fordulatot minden valamire valo, nem tul hirtelen eso gorbeju motornak vinnie kell kb. 50-60% nyomatekal. Ha nem viszi ott mas baj van pl. tekercs elkotes...
www.nanaotec.de
(avagy www.isel.hu, joval dragabban ugyanaz)
www.bibus.hu (Bautz vagy milyen motorok)
www.q-tech.hu (Sanyo-Denki motorok)
A gorbek magukert beszelnek
szamottevo teljesitmeny cirka max. 6kHz-ig
Jomagam tipikusan max. 4Khz-el hajtok fellepesben mindent...ami 600 ford/perc
Szerintem 300 fordulatot minden valamire valo, nem tul hirtelen eso gorbeju motornak vinnie kell kb. 50-60% nyomatekal. Ha nem viszi ott mas baj van pl. tekercs elkotes...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 02, 21:28
Írta: bmejdz9nu Dátum 2007 május 02, 21:28
Tekercset elkötni 4 kivezetése motornál nehéz...
A Nanotec árai publikusak a honlapjukon... sajnos nem éppen olcsók... nekem nem tőlük valók...
Valós eredményekre, tapasztatokra lennék kiváncsi... mert sok nagymotoros "cammogó" gépet láttam már...
A Nanotec árai publikusak a honlapjukon... sajnos nem éppen olcsók... nekem nem tőlük valók...
Valós eredményekre, tapasztatokra lennék kiváncsi... mert sok nagymotoros "cammogó" gépet láttam már...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 02, 21:49
Írta: 000000000 Dátum 2007 május 02, 21:49
Péter jókat kérdezel....:)
Ha az unipoláris motor egy jó minőségű és
a bipol meg nem annyira, miért ne lenne leteséges?
Egy biztos: ha egy motort be lehet kötni
mindkét módon, akkor bipolban kedvezőbb, és csak
ebben lehet kihozni a motorból a maximumot, amit
egyáltalán a step motor elméletileg adhat.
Ha az unipoláris motor egy jó minőségű és
a bipol meg nem annyira, miért ne lenne leteséges?
Egy biztos: ha egy motort be lehet kötni
mindkét módon, akkor bipolban kedvezőbb, és csak
ebben lehet kihozni a motorból a maximumot, amit
egyáltalán a step motor elméletileg adhat.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 02, 22:17
Írta: bmejdz9nu Dátum 2007 május 02, 22:17
Ezek a "rakoncátlan" motorok 4 kivezetésűek...
De a problémám nem egyedi...
Persze van 6 kivezetéses Nema34-es motorjaim... csak ma elmardt a teszt...
Tehát sajnos 8 kivezetéses (trióm) nincs.
Van egy igen nagy az a 4Kg-os.... 8 kivezetésű... Nanotech motor... de nincs hozzá olyan vezérlő amit a namotec szerint kellene... 130V... :)
(lassan kapiska mi jó a szervóban... ha nagy erőkről van szó...de tudod az evolució is fontos... és én kezdő vagyok...)
De a problémám nem egyedi...
Persze van 6 kivezetéses Nema34-es motorjaim... csak ma elmardt a teszt...
Tehát sajnos 8 kivezetéses (trióm) nincs.
Van egy igen nagy az a 4Kg-os.... 8 kivezetésű... Nanotech motor... de nincs hozzá olyan vezérlő amit a namotec szerint kellene... 130V... :)
(lassan kapiska mi jó a szervóban... ha nagy erőkről van szó...de tudod az evolució is fontos... és én kezdő vagyok...)
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 május 02, 23:12
Írta: 4mjnxdwuu Dátum 2007 május 02, 23:12
Hali.
Pont a múltkor teszteltem egy JAPAN SERVO vezérlőt./Bipoláris, alapból egész lépéses, de átkötést elvágva fél lépéses, kivülről vezérelhető pihentetés(kikapcsolva).
TÁP 50 V...
TERHELÉS NÉLKÜL A MOTOR
Nema 23 -al 1,53V 3A Bipol
3300 ford/p (meglepően nagy nyomaték) (freki generátor dekádváltása miatt nem tudom mdíg ment volna...
Nema 34 -al 2,6V 4A Unipol (hosszabb kivitel)
1 - 1 tekercsel (közép kivezetés + 1 vég)
420 ford/p egész lépésben
422 ford/p fél lépésben
2 - 2 tekercsel
kb ugyanez csak előbb elkezdett leesni az áram (logikus)
ÉS AMIRE AKKOR JÖTTEM RÁ, ALACSONY FORDULATON HAJLAMOS BEREZEGNI, HA NINCS RAJTA TERHELÉS (FÉL LÉPÉSBEN JÓVAL CSÖKKEN A HAJLAM) -ezt már régóta tudom, DE AMI ÉRDEKES HA KÉZZEL MEGTERHELTEM A FORDULAT FELSŐ HATÁRA IS FELJEBB MENT.
Ezt a motort még nem teszteltem saját vezérlővel illetve P1-el de egy fele ekkora nema 34-t igen.
A bipol vezérlővel üresen pont ott állt meg ahol a nagy, DE SAJÁT UNIPOL VEZÉRLŐVEL, 20M/P FELETT ÉS P1-IS 13M/P FELETT ÉRTEM EL, BEÉPÍTVE A HELYÉRE 16*10-ES ORSÓVAL, 10M-IG ELFOGADHATÓ ERŐVEL.
AMI 2000-ES FORDULAT
nemtudom, hogy a bipol vezérlő mit mutat, ha a moci be van építve ????!!! (szétkaptam a gépem...)
Kicsit hosszú lett úgy érzem, de hátha hasznos...[#integet2][#nevetes2][#nemtudom]
Pont a múltkor teszteltem egy JAPAN SERVO vezérlőt./Bipoláris, alapból egész lépéses, de átkötést elvágva fél lépéses, kivülről vezérelhető pihentetés(kikapcsolva).
TÁP 50 V...
TERHELÉS NÉLKÜL A MOTOR
Nema 23 -al 1,53V 3A Bipol
3300 ford/p (meglepően nagy nyomaték) (freki generátor dekádváltása miatt nem tudom mdíg ment volna...
Nema 34 -al 2,6V 4A Unipol (hosszabb kivitel)
1 - 1 tekercsel (közép kivezetés + 1 vég)
420 ford/p egész lépésben
422 ford/p fél lépésben
2 - 2 tekercsel
kb ugyanez csak előbb elkezdett leesni az áram (logikus)
ÉS AMIRE AKKOR JÖTTEM RÁ, ALACSONY FORDULATON HAJLAMOS BEREZEGNI, HA NINCS RAJTA TERHELÉS (FÉL LÉPÉSBEN JÓVAL CSÖKKEN A HAJLAM) -ezt már régóta tudom, DE AMI ÉRDEKES HA KÉZZEL MEGTERHELTEM A FORDULAT FELSŐ HATÁRA IS FELJEBB MENT.
Ezt a motort még nem teszteltem saját vezérlővel illetve P1-el de egy fele ekkora nema 34-t igen.
A bipol vezérlővel üresen pont ott állt meg ahol a nagy, DE SAJÁT UNIPOL VEZÉRLŐVEL, 20M/P FELETT ÉS P1-IS 13M/P FELETT ÉRTEM EL, BEÉPÍTVE A HELYÉRE 16*10-ES ORSÓVAL, 10M-IG ELFOGADHATÓ ERŐVEL.
AMI 2000-ES FORDULAT
nemtudom, hogy a bipol vezérlő mit mutat, ha a moci be van építve ????!!! (szétkaptam a gépem...)
Kicsit hosszú lett úgy érzem, de hátha hasznos...[#integet2][#nevetes2][#nemtudom]
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 02, 23:26
Írta: bmejdz9nu Dátum 2007 május 02, 23:26
Lehet, hogy késő van... de nem értem igazán...
Csak a Nema34-es (viszonylag enyhe) terheléses esetei érdekelnek... Uni ill. bipol változatban... sokkal jobb adatokat írsz amit én tudtam elérni... tehát nagyon érdekel...
Csak a Nema34-es (viszonylag enyhe) terheléses esetei érdekelnek... Uni ill. bipol változatban... sokkal jobb adatokat írsz amit én tudtam elérni... tehát nagyon érdekel...
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 május 02, 23:28
Írta: 4mjnxdwuu Dátum 2007 május 02, 23:28
Szerintem a mocit beépítve kell tesztelni!!!!.
Úgy próbáltad??
Úgy próbáltad??
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 02, 23:32
Írta: bmejdz9nu Dátum 2007 május 02, 23:32
A mozgó asztal van kész... nehéz (kb. 20-30kg) de igen könnyen megy a golyós vezetőkön és a golyós anyával... kézzel is teszetelve...tehát nem szorul... ez most a teszt alap...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 03, 06:59
Írta: 000000000 Dátum 2007 május 03, 06:59
Na én jópár motort teszteltem a vezérlőimmel és a következőket tapasztaltam (zanzásítva):
A bipol, vagy unipol vezérlés semmiben sem külömbözik ha minden más motoroldali feltétele eggyezik (gerjesztett Ampermenetszám, induktivitás, vaskeresztmetszet,stb.)! Ami lényeg az a tuning feszültség (hangsúlyozom azonos motoroldali feltételeknél)!
Ami viszont rendkívűl fontos a feszültség töbleten túl, az a végfok (FET) letörési feszültsége (Supressor szintje, vagy a fapados diódás megoldás)! Nem elég gyorsan felépíteni egy áramgörbét, ha kell nagyon gyorsan el is kell tudni veszíteni!!!
Egy 8 kivezetéses motornál viszont egyértelműen a bipoláris-párhuzamos kötés a legjobb (2×-es áram, kisebb induktivitás). Természetesen a tuning feszültség is így nagyobb!
Én is tapasztaltam a Péter által írt Nema 34 lomhaságot, de ezt én a nagyobb induktivitásnak és tehetetlenségnek tudtam be. A kisebb motorokkal lényegesen nagyobb sebességeket értem el én is (persze ez nagyon fügött a motor típusátol is, sokszór látszatra 2 azonos kaliberű motor között óriási külömbségeket lehet mérni)!
A bipol, vagy unipol vezérlés semmiben sem külömbözik ha minden más motoroldali feltétele eggyezik (gerjesztett Ampermenetszám, induktivitás, vaskeresztmetszet,stb.)! Ami lényeg az a tuning feszültség (hangsúlyozom azonos motoroldali feltételeknél)!
Ami viszont rendkívűl fontos a feszültség töbleten túl, az a végfok (FET) letörési feszültsége (Supressor szintje, vagy a fapados diódás megoldás)! Nem elég gyorsan felépíteni egy áramgörbét, ha kell nagyon gyorsan el is kell tudni veszíteni!!!
Egy 8 kivezetéses motornál viszont egyértelműen a bipoláris-párhuzamos kötés a legjobb (2×-es áram, kisebb induktivitás). Természetesen a tuning feszültség is így nagyobb!
Én is tapasztaltam a Péter által írt Nema 34 lomhaságot, de ezt én a nagyobb induktivitásnak és tehetetlenségnek tudtam be. A kisebb motorokkal lényegesen nagyobb sebességeket értem el én is (persze ez nagyon fügött a motor típusátol is, sokszór látszatra 2 azonos kaliberű motor között óriási külömbségeket lehet mérni)!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 03, 08:10
Írta: bmejdz9nu Dátum 2007 május 03, 08:10
Pontosan ez van. Lomhák ezek a Nema34-es motorok...
Egy Nema23 csak úgy repül.... de most összeadódnak a problémák:
1. A Nema34 mivel mechanikailag is nagyobb - ez minden gyártó oldalán láthatóan lassabb motorok, nem fürgeségre vannak hanem nyomatékra tervezve ill. csinálva...
2. "No-Name" De mi nem az? "jónevű motorok" valószínűleg jobbak...
De szerintem nem is a motor rossz mert ezek ilyenek... csak nem gondoltam erre előre...
Több CNC-s kollégával "értekezve" ezt ők is alátámasztották...
Egy cserebere folytán kerültek hozzám... az Ebay-ról valók... ahol megfigyeléseim szerint igen sokat eladtak belőlük... sőt drágábban mentek el mint a hazai árak! Pedíg ez csak 4 kivezetéses... ez pedíg nem előny - gondolom...
Ezek a motorok 4 kivezetésesek és 0.7 Ohm a tekercs ellenállásuk... 5,5A-es...2,3V-os, 4,6Nm-es... 12,7mm tengely, 2,5Kg... ennyit tudni... vérbeli No Name... egyébként igényes és szép kivitel...
Az ereje iszonyatos! DE 200-250f/perc (40-50V)felett összeesik mint... magában zörög...tragédia... már azért targédia mert már a mechanika és golyósorsó is adott...
Ha másként lenne... pl. 10-15-ös emelkedésű golyósorsó... :)
Ma folytatom a teszteket ugyanekkora unipolár motorkkal...
Igy néz ki a motor:

Egy Nema23 csak úgy repül.... de most összeadódnak a problémák:
1. A Nema34 mivel mechanikailag is nagyobb - ez minden gyártó oldalán láthatóan lassabb motorok, nem fürgeségre vannak hanem nyomatékra tervezve ill. csinálva...
2. "No-Name" De mi nem az? "jónevű motorok" valószínűleg jobbak...
De szerintem nem is a motor rossz mert ezek ilyenek... csak nem gondoltam erre előre...
Több CNC-s kollégával "értekezve" ezt ők is alátámasztották...
Egy cserebere folytán kerültek hozzám... az Ebay-ról valók... ahol megfigyeléseim szerint igen sokat eladtak belőlük... sőt drágábban mentek el mint a hazai árak! Pedíg ez csak 4 kivezetéses... ez pedíg nem előny - gondolom...
Ezek a motorok 4 kivezetésesek és 0.7 Ohm a tekercs ellenállásuk... 5,5A-es...2,3V-os, 4,6Nm-es... 12,7mm tengely, 2,5Kg... ennyit tudni... vérbeli No Name... egyébként igényes és szép kivitel...
Az ereje iszonyatos! DE 200-250f/perc (40-50V)felett összeesik mint... magában zörög...tragédia... már azért targédia mert már a mechanika és golyósorsó is adott...
Ha másként lenne... pl. 10-15-ös emelkedésű golyósorsó... :)
Ma folytatom a teszteket ugyanekkora unipolár motorkkal...
Igy néz ki a motor:
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 03, 08:17
Írta: 000000000 Dátum 2007 május 03, 08:17
Az, hogy 4 kivezetéses az önmagában nem hátrány (fix bipol), csak nem lehet uninak elkötni és nem variálható a kötésmódja (soros/párhuzamos)!
A 8 kivezetéses univerzális motor, variálható tekercskötésekkel.
Szerintem egy 8 kivezetéses bipol+párhuzamos kötsben ugyan azt tudja, mint egy gyárilag 4 kivezetéses (illene neki)! Mivel mindegyiket max gerjesztésre illik méretezni.
A 8 kivezetéses univerzális motor, variálható tekercskötésekkel.
Szerintem egy 8 kivezetéses bipol+párhuzamos kötsben ugyan azt tudja, mint egy gyárilag 4 kivezetéses (illene neki)! Mivel mindegyiket max gerjesztésre illik méretezni.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 03, 08:54
Írta: bmejdz9nu Dátum 2007 május 03, 08:54
Ma folytatom a teszteket ugyanekkora unipolár motorkkal... (ez előbb elírtam... de már korr.)
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 03, 16:43
Írta: bmejdz9nu Dátum 2007 május 03, 16:43
A nagy 4kg-os 8 kivezetéses Nanotec motor is totál pontosan ott és akkor veszíti a fordulatát... tehát nem a motorban van "baj" ezek mind ilyenek...
40V-on 200-as fordulaton... kézzel lefogható a tengely... ez lesz a referencia alap...
(persze 150-nél semmivel ... :)
Jön most az Unipolar Nema34-es teszt...
40V-on 200-as fordulaton... kézzel lefogható a tengely... ez lesz a referencia alap...
(persze 150-nél semmivel ... :)
Jön most az Unipolar Nema34-es teszt...
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2007 május 03, 17:51
Írta: Motoros Dátum 2007 május 03, 17:51
Vexta motornak a karakterisztikája szeint pl a 8 Nm-es motor a névl nyomatékot 100 ford/perc-ig tudja, efelett meredeken esik. 300-as fordulatnál már csak 4Nm
Úgyhogy ez renben van így. Ez ilyen
Úgyhogy ez renben van így. Ez ilyen
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2007 május 03, 19:35
Írta: Motoros Dátum 2007 május 03, 19:35
Ezért is lehet duplán csodálkozni az itt időnként előadott nagyméretű "száguldozó" gépeken. A 6-8 Nm-es motorok csak cammognak /100-200ford/perc/ tehát ha nagy utazó sebességet akarok akkor valamiféle többszörös gyorsító áttételre van szükség. Akkor viszont a felbontás veszett oda a fél meg egészlépéses vezérlőkkel.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 03, 19:46
Írta: 000000000 Dátum 2007 május 03, 19:46
Igen itt van jelentősége a mirostepnek.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 03, 20:09
Írta: bmejdz9nu Dátum 2007 május 03, 20:09
Hát igen...ekkor ez "kötelező"...
De akkor meg 10-15-20-as emelkedésű golyósorsó kellene...
vagy fogaszíjas áttétel... ráadásul felfelé konvertálással... ami szerintem hiba lehetőséget hordoz magában...
A képtáramban ahogy elnéztem a képeket... nem sok ilyen megoldás van...
Lefelé konvertálni a forgást sokkal egyszerűbb és biztosabb és erre sok jó megoldás is van...
Pl. PlanetDrive... abból 1/3-as... ezt használják a szervórendszereknél... Nema34-Nema34 mindkét fele... fix & fertig házban is van)
...ez majdnem olyan pontos mint a HarmonicDrive... de a HD-t csak 50-200-as áttétellel létezik... Persze a fordulatszám lefelé konvertálásnál... a bordásszíj is jobban működhet...
De akkor meg 10-15-20-as emelkedésű golyósorsó kellene...
vagy fogaszíjas áttétel... ráadásul felfelé konvertálással... ami szerintem hiba lehetőséget hordoz magában...
A képtáramban ahogy elnéztem a képeket... nem sok ilyen megoldás van...
Lefelé konvertálni a forgást sokkal egyszerűbb és biztosabb és erre sok jó megoldás is van...
Pl. PlanetDrive... abból 1/3-as... ezt használják a szervórendszereknél... Nema34-Nema34 mindkét fele... fix & fertig házban is van)
...ez majdnem olyan pontos mint a HarmonicDrive... de a HD-t csak 50-200-as áttétellel létezik... Persze a fordulatszám lefelé konvertálásnál... a bordásszíj is jobban működhet...
Cím: Re:Léptetőmotor
Írta: fs9s63xkf Dátum 2007 május 03, 20:23
Írta: fs9s63xkf Dátum 2007 május 03, 20:23
Én is tesztelgettem egy kicsit... Egy "*** kínai" Nema34 6.4Nm-es motorral próbálkoztam.
Bipoláris, párhuzamos, 60 V :
Megfelelő gyorsítással 5500 ford/perccel gond nélkül forog és kézzel 2000 körüli fordulatig nem lehet lefogni, ha ráraktam egy kisebb tokmányt olyan 800 fölött lehetett csak.
Bipoláris, párhuzamos, 60 V :
Megfelelő gyorsítással 5500 ford/perccel gond nélkül forog és kézzel 2000 körüli fordulatig nem lehet lefogni, ha ráraktam egy kisebb tokmányt olyan 800 fölött lehetett csak.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 03, 20:35
Írta: bmejdz9nu Dátum 2007 május 03, 20:35
jól írtad 5500 ford/perc...2000ford/perc ez 10-20x mint amit mi tudtunk... és nem az a baj, hogy erejét veszti... hanem megáll...
Cím: Re:Léptetőmotor
Írta: fs9s63xkf Dátum 2007 május 03, 20:56
Írta: fs9s63xkf Dátum 2007 május 03, 20:56
jól :) a Mach3 is azt mondta, a digitális ford. mérő is és ránézésre sem lehet összetéveszteni az 500 az 5000-el ...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 03, 20:59
Írta: bmejdz9nu Dátum 2007 május 03, 20:59
Na ez az egész probléma nincs unipolárba...
Vagyis Unipolár vezérlővel 6 kivezetéses motorral... tökéletesnek néz ki... 40V-on...
Most aztán már semmit sem értek...
(Motor: Nema34, 4,8A-es 2,5V, 2,5Kg, 6 kivezetéses...)
Vagyis Unipolár vezérlővel 6 kivezetéses motorral... tökéletesnek néz ki... 40V-on...
Most aztán már semmit sem értek...
(Motor: Nema34, 4,8A-es 2,5V, 2,5Kg, 6 kivezetéses...)
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 május 03, 22:01
Írta: 4mjnxdwuu Dátum 2007 május 03, 22:01
Na meddíg ment????
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 03, 22:16
Írta: bmejdz9nu Dátum 2007 május 03, 22:16
Ó jaj... totál káosz...
Valami hunyó van a WinPC-ben...
A Mach tud olyan vezérlőjelet kiadni, hogy motorpihentetés... tehát szoftverből??? SOS !!!
Valami hunyó van a WinPC-ben...
A Mach tud olyan vezérlőjelet kiadni, hogy motorpihentetés... tehát szoftverből??? SOS !!!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 03, 22:17
Írta: bmejdz9nu Dátum 2007 május 03, 22:17
Nagyon... mindjárt visszakötöm... szép linárisan veszti el a nyomatékát...
Hogy mérjem?
Hogy mérjem?
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 03, 22:21
Írta: bmejdz9nu Dátum 2007 május 03, 22:21
és ugyebár ha mégis van akkor a H1-nél ez nincs használva...?
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2007 május 03, 23:31
Írta: Kristály Árpád Dátum 2007 május 03, 23:31
Na végre!
A bűvős szó előkerült: Mikrostepping....
Ebben látom a megoldást Én is.
Hallihó!
A bűvős szó előkerült: Mikrostepping....
Ebben látom a megoldást Én is.
Hallihó!
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 május 04, 06:40
Írta: 4mjnxdwuu Dátum 2007 május 04, 06:40
Üdv.
A file tárban, a képek között van egy 3gp, real play-al megnézheted, (még átépítés előtt, kisebb nema 34-el, igaz könyebb asztallal, első tesztek közül való - még lassú -)viszonyítási alap: asztal 42 cm elmozdulás 40 cm, már nem emlékszem a sebességre, de 10m felett van, Mérd az időt, 2mp alatt van. tehát 1m-t 5mp alatt tesz meg, azaz min 12m/p. Ja ezt tudta úgy is ha ráálltam (Több mint 80 kg)(és ebben még benne van a gyorsítási idő is, -tehát nagyobb a sebesség) Az persze belátható, hogy ez csak gyorsjáratra jó vagy gravírra, jópár 10000-es fordulattal.
Nagyobb sebességre viszont, hogy ne legyen sok a felgyorsítási idő kifeszített fogazottszíj mozgatás jó, vagy fogasléces (persze mikrosteppel, hogy a felbontás is jó legyen) szerintem...
Arra kiváncsi lennék, hogy a kolléga nyákmarója mekkora sebességet tud, mert a talin már láttam a gépet, de a gyorsjáratra nem emlékszem. nem tudom, hogy 3 vagy 4 mm az orsó emelkedése, igy csak tippelek, ha golyós lenne min 4m/p, trapézzal,lötyögős anyával min 2.5m/p, feszessel 1,5m/p.
Csak tippeltem, légyszíves írd már meg...
Köszike.
A file tárban, a képek között van egy 3gp, real play-al megnézheted, (még átépítés előtt, kisebb nema 34-el, igaz könyebb asztallal, első tesztek közül való - még lassú -)viszonyítási alap: asztal 42 cm elmozdulás 40 cm, már nem emlékszem a sebességre, de 10m felett van, Mérd az időt, 2mp alatt van. tehát 1m-t 5mp alatt tesz meg, azaz min 12m/p. Ja ezt tudta úgy is ha ráálltam (Több mint 80 kg)(és ebben még benne van a gyorsítási idő is, -tehát nagyobb a sebesség) Az persze belátható, hogy ez csak gyorsjáratra jó vagy gravírra, jópár 10000-es fordulattal.
Nagyobb sebességre viszont, hogy ne legyen sok a felgyorsítási idő kifeszített fogazottszíj mozgatás jó, vagy fogasléces (persze mikrosteppel, hogy a felbontás is jó legyen) szerintem...
Arra kiváncsi lennék, hogy a kolléga nyákmarója mekkora sebességet tud, mert a talin már láttam a gépet, de a gyorsjáratra nem emlékszem. nem tudom, hogy 3 vagy 4 mm az orsó emelkedése, igy csak tippelek, ha golyós lenne min 4m/p, trapézzal,lötyögős anyával min 2.5m/p, feszessel 1,5m/p.
Csak tippeltem, légyszíves írd már meg...
Köszike.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 04, 06:55
Írta: 000000000 Dátum 2007 május 04, 06:55
A H1 belsőleg intézi el a "pihentetést", nem kell neki semmilyen szoftver jele!
Van nekem egy régi 6A-es unipoláris motorom, amit bipolárisan használok tesztelésre és P2A-val simán 6000-felé megyek 40V-ról üresen! Terhelve 2000-ren még sebet ejt a kezemen! Erősen motorfüggő a dolog...
Van nekem egy régi 6A-es unipoláris motorom, amit bipolárisan használok tesztelésre és P2A-val simán 6000-felé megyek 40V-ról üresen! Terhelve 2000-ren még sebet ejt a kezemen! Erősen motorfüggő a dolog...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 04, 06:57
Írta: 000000000 Dátum 2007 május 04, 06:57
Erről van fent videóm is valahol, meg kell keresni...
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2007 május 04, 07:15
Írta: Motoros Dátum 2007 május 04, 07:15
6000 fordulat/perc?? jól értem? A köszörűgépem fortunája is csak 5000-t tud.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 04, 07:19
Írta: bmejdz9nu Dátum 2007 május 04, 07:19
Minden megy.... Persze a Nema34 lomha... de nem annyira...
A probléma ami volt: (én hüll..) persze, ha nem így lett volna... bu..a maradok...
Ez a motor vezérlő ill. az elosztó (segédtáp, relék stb...) egysége...kimondottan WinPC-NC-hez készült...
Gyári összekötő kábel is volt hozzá... De én kezdésnek azonnal kettévágtam, mindkét végét az összekötőnek próbapanelra tettem....
Mert több vezérlőt és több motort is eleve tesztelni akartam...
Megkerestem a GND-STEP-DIR hármast... az X-re...
Csakhogy az LPT17-esen kijön egy olyan jel: job works... és ez be volt kötve... ezzel van szabályozva a motor pihentetés... tehát a motor áram le volt korlátozva...
De ilyen megoldásról még nem is halottam... Na WinPC-NC... ezért sincs még topikja... most megismerem...azaz kiismerem...
Persze a vezérlőn, ezt át lehet kapcsolni automataára is... ha nincs ez a jel...
Ez jobb megoldás pihentetésre?
[#falbav]
A probléma ami volt: (én hüll..) persze, ha nem így lett volna... bu..a maradok...
Ez a motor vezérlő ill. az elosztó (segédtáp, relék stb...) egysége...kimondottan WinPC-NC-hez készült...
Gyári összekötő kábel is volt hozzá... De én kezdésnek azonnal kettévágtam, mindkét végét az összekötőnek próbapanelra tettem....
Mert több vezérlőt és több motort is eleve tesztelni akartam...
Megkerestem a GND-STEP-DIR hármast... az X-re...
Csakhogy az LPT17-esen kijön egy olyan jel: job works... és ez be volt kötve... ezzel van szabályozva a motor pihentetés... tehát a motor áram le volt korlátozva...
De ilyen megoldásról még nem is halottam... Na WinPC-NC... ezért sincs még topikja... most megismerem...azaz kiismerem...
Persze a vezérlőn, ezt át lehet kapcsolni automataára is... ha nincs ez a jel...
Ez jobb megoldás pihentetésre?
[#falbav]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 04, 07:19
Írta: 000000000 Dátum 2007 május 04, 07:19
Teljesen jól!
Közben a videót a File tárban meg is találtam, de valamiért csonkoilódott a file!!!
Ép videó a P2A leírásánál van, de azon sajnos csak egy NEMA23 (?), 2.5Nm-es motor látható 4320 f/min-el:
bipoláris motor 4320 f/min-el, üresen, 40V-ról
Közben a videót a File tárban meg is találtam, de valamiért csonkoilódott a file!!!
Ép videó a P2A leírásánál van, de azon sajnos csak egy NEMA23 (?), 2.5Nm-es motor látható 4320 f/min-el:
bipoláris motor 4320 f/min-el, üresen, 40V-ról
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 04, 07:21
Írta: 000000000 Dátum 2007 május 04, 07:21
Pedig ezt MINDEN vezérlő szoft is ismeri (Machx, KCam4, TCNC, stb.)! Nem épp újdonság!
Az automata szerintem jobb (a Vezérlő tudja, hogy mikor milyen gerjesztés kell és nem kell plusz biteket ilyesmira pazarolni)!
Az automata szerintem jobb (a Vezérlő tudja, hogy mikor milyen gerjesztés kell és nem kell plusz biteket ilyesmira pazarolni)!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 04, 07:22
Írta: bmejdz9nu Dátum 2007 május 04, 07:22
most 40V-on... a 30kg-os asztalt elég biztosan mozgatja 3300mm/perc... ha rajt ülök akkor is...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 04, 07:30
Írta: bmejdz9nu Dátum 2007 május 04, 07:30
Nade engem ez jól leszív...ott... "Ha én is Mach-os lennék"...
Nade "sosejövökrá" ha nem kötöm be a H1-et...
H1 elsőre:
Sajnos különböző motorokkal nehéz összehasonlítani... a vezérlőket... ma folytatom... A H1 Nema34 unipoláris motorokkal határozattabban gyorsabbnak néz ki...
Vagy a vezérlő jó :), vagy a motorok... vagy az Unipoláris vezérlési elv... nade még nem mondok véleményt... mindent kétszer megnézek... és figyelembe veszek... teljesen "másként" működnek ill. viselkednek... nehéz hasonlítani... erőt még nem is teszteltem...
Nade "sosejövökrá" ha nem kötöm be a H1-et...
H1 elsőre:
Sajnos különböző motorokkal nehéz összehasonlítani... a vezérlőket... ma folytatom... A H1 Nema34 unipoláris motorokkal határozattabban gyorsabbnak néz ki...
Vagy a vezérlő jó :), vagy a motorok... vagy az Unipoláris vezérlési elv... nade még nem mondok véleményt... mindent kétszer megnézek... és figyelembe veszek... teljesen "másként" működnek ill. viselkednek... nehéz hasonlítani... erőt még nem is teszteltem...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 04, 07:34
Írta: bmejdz9nu Dátum 2007 május 04, 07:34
Ugyanilyen videó H1 és Nema34-es motoros változatban nincs? Esetleg Nema23-al...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 04, 07:36
Írta: 000000000 Dátum 2007 május 04, 07:36
Biztos van, csak nem biztos, hogy megtalálom...[#confused]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 04, 07:40
Írta: 000000000 Dátum 2007 május 04, 07:40
Sajnos nem találok feltöltve sehol. Talán otthon az arhívumban...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 04, 07:42
Írta: 000000000 Dátum 2007 május 04, 07:42
Egy 6A-es b..nagy motorral készíthetek majd videót (unipoláris), de persze csak 4.7A-el hajtva (H1)!
Ez jóval nagyobb egy NEMA34-től (2×)!
Ez jóval nagyobb egy NEMA34-től (2×)!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 04, 07:44
Írta: bmejdz9nu Dátum 2007 május 04, 07:44
Pedíg jó lenne... furcsa dolgokat is tapasztalok vele... De ezt a másik topikban kellene? Az időzítés amit mondtál... fontos infó volt!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 04, 07:46
Írta: 000000000 Dátum 2007 május 04, 07:46
Miért, szerinted a műszaki infókat csak vicből írom?![#vigyor2]
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 04, 07:51
Írta: bmejdz9nu Dátum 2007 május 04, 07:51
Nem... csak nem is gondoltam volna... 0uS-ra volt állítva... ha úgy hagyom treljesen nem megy... de hogyis ment ez a német vezérlő ouS-al? Szkópon nézve tényleg tű imp. volt... alíg bírtam szinkronizálni a szkópot...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 04, 08:01
Írta: 000000000 Dátum 2007 május 04, 08:01
A P2A már menne "0uS"-el (ami ezek szerint mégsem 0...
A H1-nek min 18uS-kell!
A H1-nek min 18uS-kell!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 04, 08:18
Írta: bmejdz9nu Dátum 2007 május 04, 08:18
Igen az a nulla beállítás csak elvben lehet nulla mert ha tényleg nulla lenne akkor nem is lenne... (na ezt jól megírtam :)
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 04, 08:24
Írta: bmejdz9nu Dátum 2007 május 04, 08:24
De azért visszakanyarodva ezekhez a "hatalmas" és "gyári adatokat megszégyenítő" fordulatokra:
Amít most látok:
"Reptetni" legjobban unipolárral lehet, a bipolár már "csak" a második helyen... :)
Nade... ezek gépbe lesznek... és ha megkapják a terhelést... akkor beáll a gyári "adatlap effektus"... Tehát ha csak a tengelyt kell reptetni... az nem ugyanaz... ha egy "ventilátort" szerülnk rá márís le terheltük... :)
Amít most látok:
"Reptetni" legjobban unipolárral lehet, a bipolár már "csak" a második helyen... :)
Nade... ezek gépbe lesznek... és ha megkapják a terhelést... akkor beáll a gyári "adatlap effektus"... Tehát ha csak a tengelyt kell reptetni... az nem ugyanaz... ha egy "ventilátort" szerülnk rá márís le terheltük... :)
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2007 május 04, 12:17
Írta: Kristály Árpád Dátum 2007 május 04, 12:17
Hallihó!
Igen nekem is az jön be, hogy végtére ezek nem ventilátor motorok!
Ha megnézi az emberfia a nagyobb motorok jelleggörbéjét akkor már max 500-fordulaton, mikro motorokká válnak!........
Úgyhogy Péter Úr!
Mondja Maga Is..... füftauzen....
Hallihó!
Igen nekem is az jön be, hogy végtére ezek nem ventilátor motorok!
Ha megnézi az emberfia a nagyobb motorok jelleggörbéjét akkor már max 500-fordulaton, mikro motorokká válnak!........
Úgyhogy Péter Úr!
Mondja Maga Is..... füftauzen....
Hallihó!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 04, 12:50
Írta: 000000000 Dátum 2007 május 04, 12:50
Természetesen más üresen és terhelve! Sőt még az sem mindegy, hogy milyen a motor felfogatása, mert ha túl merev (gemény), máshogy alakul a rezonaciája és így a görbélye is (ez igaz a kuplungra is)! A túl lágy sem jó (azmeg ront a dinamikán)! Nekem van olyan motorom ami gyárilag gumiágyba van szerelve! Meg olyan is ami gumibakos közcsavarral van felfogatva 8mint az autók blokja). Ez is érdekes...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 04, 12:52
Írta: 000000000 Dátum 2007 május 04, 12:52
Csak próbáljátok ki a következőt:
1. fogd meg a markodba és csinálj egy max sebességi határkeresési tesztet (gyorsítással), terheletlenül,
2. ugyan ezt az asztalhoz szorítva erősen!
1. fogd meg a markodba és csinálj egy max sebességi határkeresési tesztet (gyorsítással), terheletlenül,
2. ugyan ezt az asztalhoz szorítva erősen!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 04, 15:16
Írta: bmejdz9nu Dátum 2007 május 04, 15:16
Én is láttam már motort "gumiágyba" szerelve...
Ez hasznos dolog? Sajnos már kibontva láttam... tehát nem tudom, hogy kupplung helyett alkalmazták vagy pluszba volt...?
Ez hasznos dolog? Sajnos már kibontva láttam... tehát nem tudom, hogy kupplung helyett alkalmazták vagy pluszba volt...?
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 04, 15:51
Írta: bmejdz9nu Dátum 2007 május 04, 15:51
... és mégegy gondolat... a gumágyhoz...
Sok gépen azt láttam, hogy a motor úgy van felszerelve, hogy passzentosan és nagy aluminiumra... ezt talán a hűelvezés érdekében tetteék?
Mert ha van gumiágy.... vagy "pálcikákon- csavarokon" a motor akkor ez a hőelvezetési lehetőség ugrik... vagy???
Sok gépen azt láttam, hogy a motor úgy van felszerelve, hogy passzentosan és nagy aluminiumra... ezt talán a hűelvezés érdekében tetteék?
Mert ha van gumiágy.... vagy "pálcikákon- csavarokon" a motor akkor ez a hőelvezetési lehetőség ugrik... vagy???
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 04, 16:15
Írta: 000000000 Dátum 2007 május 04, 16:15
Azon már én is gondolkoztam, hogy miért nem öntik a motort körül hűtőbordával, vagy készítik olyanra a motor testét, mint a hagyományos asszinkron motor háza (bordás)?!
Amit te mondasz (passzos illesztés), olyat még nem láttam élőbe (hozzám már kiszedett motorok kerültek)!
Amit te mondasz (passzos illesztés), olyat még nem láttam élőbe (hozzám már kiszedett motorok kerültek)!
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2007 május 04, 17:14
Írta: Motoros Dátum 2007 május 04, 17:14
Akkor itt egy példa a direkt felrakásra:

Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 04, 18:36
Írta: 000000000 Dátum 2007 május 04, 18:36
De hol a "hűtőborda"?!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 04, 19:54
Írta: bmejdz9nu Dátum 2007 május 04, 19:54
A T-tengely maga... Nem kell ezért klasszikus hűtőborda... elég ha elviszi a hőt... és itt van hová...!!!
Én úgy tervezem és olyan passzolással csináltam* , hogy hővezető pasztával megkenem a végén... de nagyon sajnálom, hogy nem tudok "lágy felfogatást" használni... mert az meg a rezonanciáknak tenne jót.... gondolom...
Persze nem is biztos, hogy el kell vezetnem mert nincs hő... (nem mindíg - nem minden megoldásban)
* A nema34-es motor felfogatás nem a szabványok királya... a belső kör mélysége sajnos változó...
Én úgy tervezem és olyan passzolással csináltam* , hogy hővezető pasztával megkenem a végén... de nagyon sajnálom, hogy nem tudok "lágy felfogatást" használni... mert az meg a rezonanciáknak tenne jót.... gondolom...
Persze nem is biztos, hogy el kell vezetnem mert nincs hő... (nem mindíg - nem minden megoldásban)
* A nema34-es motor felfogatás nem a szabványok királya... a belső kör mélysége sajnos változó...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 04, 19:58
Írta: bmejdz9nu Dátum 2007 május 04, 19:58
Van: a csatlakozási felülete...
Ott kell levenni róla a hőt... nem is kevés felület ez... (csak nem "pálcikákra" kell tenni)
Ez jobb megoldás mint a "seggére" ventilátort szerelni... érdemes ezzel foglalkozni mert többet ki lehet hozni egy motorból, ha erre előre odafigyelünk a tervezésnél... mert a motor teljesítményének a hőmérséklet szabja a határát! Pénz megtakarítás is... :)
Jól gondolom?
Ott kell levenni róla a hőt... nem is kevés felület ez... (csak nem "pálcikákra" kell tenni)
Ez jobb megoldás mint a "seggére" ventilátort szerelni... érdemes ezzel foglalkozni mert többet ki lehet hozni egy motorból, ha erre előre odafigyelünk a tervezésnél... mert a motor teljesítményének a hőmérséklet szabja a határát! Pénz megtakarítás is... :)
Jól gondolom?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 05, 07:41
Írta: 000000000 Dátum 2007 május 05, 07:41
Akár lehet a motorra egy "kosarat" is esztergálni, körkörös bordázattal hűtőnek! Így egy "pálcikás" rögzítésnél is nőne a felülete!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 05, 07:41
Írta: 000000000 Dátum 2007 május 05, 07:41
Persze csak kör keresztmetszetű motoroknál megoldható...
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2007 május 05, 07:51
Írta: Szalai György Dátum 2007 május 05, 07:51
És ez?
Most találtam. Tuti hatékony.
Hány 100%-ra lehet igy terhelni?

Most nyomtam entert is.
Most találtam. Tuti hatékony.
Hány 100%-ra lehet igy terhelni?
Most nyomtam entert is.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 05, 07:57
Írta: 000000000 Dátum 2007 május 05, 07:57
Ilyesmire gondoltam (talán egy kicsit nagyobb bordázattal)!
A túlterhelést szerintem csakis kisérletezéssel lehetne megállapítani! Pláne jó lenne még egy ventillel megtámogatva!
A túlterhelést szerintem csakis kisérletezéssel lehetne megállapítani! Pláne jó lenne még egy ventillel megtámogatva!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 05, 07:58
Írta: 000000000 Dátum 2007 május 05, 07:58
Mot látom ez cső!!!
Hőcserélő???
Hőcserélő???
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 05, 08:07
Írta: bmejdz9nu Dátum 2007 május 05, 08:07
Persze lehetne vízhűtéses is mind a legújabb PC proci hűtőknél... de a "felfogatási hő átadás" adja magát... nincs külön meló vele... és maga a mechanika viszi el a hőt...
A ventilátor is jó... csak megint zaj forrás... kopik... port keverhet...
Ez a fajta "tuning" biztos jó lehet... mert a vezérlők leírásánál mindíg azt írják: az áramot kisérleti úton állítsd be a motorhőmérséklet függvényében...
A ventilátor is jó... csak megint zaj forrás... kopik... port keverhet...
Ez a fajta "tuning" biztos jó lehet... mert a vezérlők leírásánál mindíg azt írják: az áramot kisérleti úton állítsd be a motorhőmérséklet függvényében...
Cím: Re:Léptetőmotor
Írta: vthgizrff Dátum 2007 május 05, 11:21
Írta: vthgizrff Dátum 2007 május 05, 11:21
Szerintem meg sokkal könnyebb megoldani egy szögletes motornál a hűtést. Gyári alu hűtőborda, néhány pici csavaral összeszorítva és kész is van. Lehet, hogy nem túl szép, de egyszerű.
Cím: Re:Léptetőmotor
Írta: sasi Dátum 2007 május 05, 12:15
Írta: sasi Dátum 2007 május 05, 12:15
A motorra szerelhető hűtőborda - EMCO megoldás.
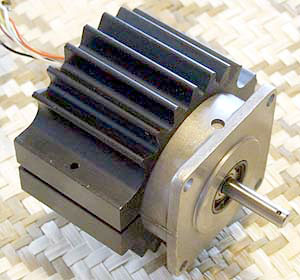
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 05, 12:57
Írta: 000000000 Dátum 2007 május 05, 12:57
Üdvözlök mndenkit. Frissen regisztráltam magam, de azért elötte az elejétől fogva végigolvastam a topikot, hogy lehetőleg ne kérdezzek túl nagy butaságokat.:)
Van egy fénycső hibás scennerem amiben van egy 5 vezetékes moci, mototech emtr020300. Sajna a google nem volt a barátom, mert nem találtam adatlapot erről a motorról, hogy mit tudhat. Elég nagy fordulatú lehet, mert 3 db fogaskeréken keresztül van lelassítva a kocsi mozgatása. Az is lehetséges, hogy ez nem is léptetőmotor? Esetleg tud valaki adatlapot róla?
Van egy fénycső hibás scennerem amiben van egy 5 vezetékes moci, mototech emtr020300. Sajna a google nem volt a barátom, mert nem találtam adatlapot erről a motorról, hogy mit tudhat. Elég nagy fordulatú lehet, mert 3 db fogaskeréken keresztül van lelassítva a kocsi mozgatása. Az is lehetséges, hogy ez nem is léptetőmotor? Esetleg tud valaki adatlapot róla?
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2007 május 05, 13:19
Írta: Szalai György Dátum 2007 május 05, 13:19
Hajómodellhez való motor. Ott kézenfekvő a vizhűtés.
Régi RT ujságban emlékszem volt egy cikk, ott még a kapcsolófetek felerősitő furataiba is rézcsövet forasztottak, és vizzel hűtötték őket.
Szintén hajómodell számára. Ráadásul áramkörönként vagy négy fetet használtak párhuzamosan kötve, igy alacsonyabb értéken tartva a nyitott csatornaellenállást, és a veszteséget. Ezek egy egy közös rézcsőre szorosan egymás háta mögé voltak szerelve.
Régi RT ujságban emlékszem volt egy cikk, ott még a kapcsolófetek felerősitő furataiba is rézcsövet forasztottak, és vizzel hűtötték őket.
Szintén hajómodell számára. Ráadásul áramkörönként vagy négy fetet használtak párhuzamosan kötve, igy alacsonyabb értéken tartva a nyitott csatornaellenállást, és a veszteséget. Ezek egy egy közös rézcsőre szorosan egymás háta mögé voltak szerelve.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 05, 13:26
Írta: bmejdz9nu Dátum 2007 május 05, 13:26
Üdv.
mérd ki a tekercsek kapcsolatát, ellenállását... szerintem... abból ár lehet jönni dolgokra...
mérd ki a tekercsek kapcsolatát, ellenállását... szerintem... abból ár lehet jönni dolgokra...
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2007 május 05, 16:07
Írta: Szalai György Dátum 2007 május 05, 16:07
ITT szó van a motorodról, de nem értem.
Ezen a fórumon többnyelvű emberek is megfordulnak néha, hátha megfejti valaki.
Ezen a fórumon többnyelvű emberek is megfordulnak néha, hátha megfejti valaki.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 05, 17:20
Írta: 000000000 Dátum 2007 május 05, 17:20
Tökéletes! ilyenre gondoltam!
Cím: Re:Léptetőmotor
Írta: 3vv2btrhv Dátum 2007 május 05, 20:38
Írta: 3vv2btrhv Dátum 2007 május 05, 20:38
A mai magyar nemzetben van egy cikk fordito programrol amit magyarok fejlesztettek hamarosan publikálják ami sok ehez hasonlo problémát meg oldhat .
nekem a magyar-angol fordito nagyon hiányzik .
Tibor
nekem a magyar-angol fordito nagyon hiányzik .
Tibor
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 06, 12:37
Írta: 000000000 Dátum 2007 május 06, 12:37
Köszi, de ezt a fórumot én is megtaláltam a google-vel, de nekem nagyon marsi nyelven van :(
Megpróbáltam kimérni a mocit, egyenlőre eredmény nélkül, mert egy miniatür csatlakozóban végződnek a vezetékek. A gombostű sem fért bele a csatiba. A csatit meg egyenlőre nem akartam levágni, mert megvan az ellendarabja is a nyákon még. A nyák pedig müxik. Ha a scenner fejét elhúzom középre és utána bekapcsolom akkor szépen kihúzza a végére a fejet. Vékonyabb vezetéket azért nem akartam használni a mérésnél mert meghamisíthatja a mérést a bizonytalan érintkezés.
Megpróbáltam kimérni a mocit, egyenlőre eredmény nélkül, mert egy miniatür csatlakozóban végződnek a vezetékek. A gombostű sem fért bele a csatiba. A csatit meg egyenlőre nem akartam levágni, mert megvan az ellendarabja is a nyákon még. A nyák pedig müxik. Ha a scenner fejét elhúzom középre és utána bekapcsolom akkor szépen kihúzza a végére a fejet. Vékonyabb vezetéket azért nem akartam használni a mérésnél mert meghamisíthatja a mérést a bizonytalan érintkezés.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 06, 12:39
Írta: bmejdz9nu Dátum 2007 május 06, 12:39
Ez a jövő? Léptetőmotor beépített vezérlővel:

Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 12, 12:04
Írta: bmejdz9nu Dátum 2007 május 12, 12:04
Bibolár vezérlőre rákötve az Unipoláros motor (nema34 - 6kiv.) úgy hogy csak 1-1 tekercs dolgozik... hát nem az igazi... a sebesség 20%-al rosszabb... az erőt pontosan nem tudom mérni... de az mégcsak kielégítőnek tünik... de hangja olyan mintha "ki lenne egy kereke"... érezni, hogy ez így nem jó... daraboskás, zörgős, stb...
Ha "sorbakötöm" a tekercseket (tehát a végeket kötöm a vezérlőre) akkor igen jelentős erővesztés... gondolom ilyenkor a "csillagos égbe" kellene a feszt emelni... (100V-ra?) tehát ez sem járható...
Marad a bipoláris 4 kiv. motor a bip. vezérlőhoz...
A 6 kivez. pedíg a H1-hez....
vagy szétszedem a motort és megpróbálom a tekercseket megkeresni és párhuzanmosan kötni....?
Csinált már ilyet valaki? (SanyoDenki, Nema34, 6kiv., 2,5V, 4,8A...)
Ha "sorbakötöm" a tekercseket (tehát a végeket kötöm a vezérlőre) akkor igen jelentős erővesztés... gondolom ilyenkor a "csillagos égbe" kellene a feszt emelni... (100V-ra?) tehát ez sem járható...
Marad a bipoláris 4 kiv. motor a bip. vezérlőhoz...
A 6 kivez. pedíg a H1-hez....
vagy szétszedem a motort és megpróbálom a tekercseket megkeresni és párhuzanmosan kötni....?
Csinált már ilyet valaki? (SanyoDenki, Nema34, 6kiv., 2,5V, 4,8A...)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 12, 13:21
Írta: 000000000 Dátum 2007 május 12, 13:21
Ilyet (darabosság) én nem tapasztaltam idáig! A P2A-val láttad a sebvesség tesztet unipoláris motorral! Ott szépen fut és ereje is van (bár biztos erősebb lenne még ettől is ha eleve bipoláris lenne a tekercselése)!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 12, 14:33
Írta: bmejdz9nu Dátum 2007 május 12, 14:33
István igazad van... Megint... :) (azt nem írom... :)
ismét összeszereltem:
a kupplung csinálta a ronda hangot... Na de ilyet? Hallatlan v. hallható :)
Be kellett zsilikonnal zzírozni... erre sem gondoltam... kiszáradt? Műanyag betétes eredeti Rotex kupplungok... Ki hitte volna...
A sebesség rekordot továbbra is a H1 tartja... :) "Unipolár módban"...
Köszönöm a válaszodat mert egy életre a sötétségben maradtam volna....
Majd egyszer írok egy könyvet: "Egy kezdő CNC-s gyötrelmei" címmel... :)
ismét összeszereltem:
a kupplung csinálta a ronda hangot... Na de ilyet? Hallatlan v. hallható :)
Be kellett zsilikonnal zzírozni... erre sem gondoltam... kiszáradt? Műanyag betétes eredeti Rotex kupplungok... Ki hitte volna...
A sebesség rekordot továbbra is a H1 tartja... :) "Unipolár módban"...
Köszönöm a válaszodat mert egy életre a sötétségben maradtam volna....
Majd egyszer írok egy könyvet: "Egy kezdő CNC-s gyötrelmei" címmel... :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 12, 16:07
Írta: 000000000 Dátum 2007 május 12, 16:07
A tapasztalat a legnagyobb tanító mester..![#lookaround]
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 12, 16:25
Írta: bmejdz9nu Dátum 2007 május 12, 16:25
Jaj de ez a sok "tapasztalat" már a sírba visz...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 12, 17:49
Írta: 000000000 Dátum 2007 május 12, 17:49
A jó pap holtig tanul...[#ravasz1]
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 12, 18:59
Írta: bmejdz9nu Dátum 2007 május 12, 18:59
Ma egésznap szívás... most meg "lépésvesztés" mindjárt az elektronikában kerestem a bajt... de nem! Megint a kupplungok szívattak...forogtak el picit a tengelyen... persze a 60ms-os gyosítás keménydolog ekkora teherrel (30Kg az asztal)... mint a kalapácsütés úgy indítja a motort... és a kapcs. ü. táp sem "enged" ... persze ez jó kis párosítás lesz... megkenem majd Loctite-val... :)
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 12, 21:45
Írta: bmejdz9nu Dátum 2007 május 12, 21:45
Utánna néztem kicsit a motoroknak...
Hát igen... kis feszültség... kis ohmikus ellenállás... kis induktivitás a nagy fordulatszámon való nyomaték kulcsa... Persze a nagy áram ilyenkor automatikusan jön mellé...
Ilyenek is vannak, Nema34-es(!) méretben:
1,6V - 6A - 0.27R - 1,65mH... (és "csak" 3Nm-es..)
Ezért is van az, hogy a Nema23-asok olyan jól teljesítenek... vagy rosszul látom...?
Hát igen... kis feszültség... kis ohmikus ellenállás... kis induktivitás a nagy fordulatszámon való nyomaték kulcsa... Persze a nagy áram ilyenkor automatikusan jön mellé...
Ilyenek is vannak, Nema34-es(!) méretben:
1,6V - 6A - 0.27R - 1,65mH... (és "csak" 3Nm-es..)
Ezért is van az, hogy a Nema23-asok olyan jól teljesítenek... vagy rosszul látom...?
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 13, 08:39
Írta: bmejdz9nu Dátum 2007 május 13, 08:39
Ez a "tesztelgetés" idő és .... igényes, tehát nem kedvelem... már...
De a lényeg, hogy ha a motort túl nagyra választjuk az vissza üt a sebességben... ha jól látom... Ha meg brutális erők kellenek akkor ott a microstep... csak kérdés, hogy a motor tudja e? mert az elv egyszerű de igen pontos gyártás technologiát követel meg...
Azt is olvastam, hogy hobby szinten a microstep... de ez egy másik topikba való...
Érdekes dolgokat találtam pl.:
Egy cégnél van két motor a katalógusban:
mindekettő motor azonos nyomatékú...
egyik Nema23-as a másik Nema34-es...
De tekercsek teljesen mások... a Nema34-est jóval "vastagabb drótból" tekerték... a többi elképzelhető...
De szerintem ezt István tudja a legjobban...
De a lényeg, hogy ha a motort túl nagyra választjuk az vissza üt a sebességben... ha jól látom... Ha meg brutális erők kellenek akkor ott a microstep... csak kérdés, hogy a motor tudja e? mert az elv egyszerű de igen pontos gyártás technologiát követel meg...
Azt is olvastam, hogy hobby szinten a microstep... de ez egy másik topikba való...
Érdekes dolgokat találtam pl.:
Egy cégnél van két motor a katalógusban:
mindekettő motor azonos nyomatékú...
egyik Nema23-as a másik Nema34-es...
De tekercsek teljesen mások... a Nema34-est jóval "vastagabb drótból" tekerték... a többi elképzelhető...
De szerintem ezt István tudja a legjobban...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 13, 09:18
Írta: 000000000 Dátum 2007 május 13, 09:18
Péter! Szerintem egészen egyszerűen közelítsed
ezt a témát a motor saját forgórész tömege, és
átmérője (tehetetlenségi nyomaték) felől.
Minden mozgó rendszerben a tömeg dinamikailag
meghatórozó. Ezen vezérlő oldalról semmilyen
elektronikai "bűvészkedéssel" nem lehet
segíteni. Egy példa, és ez szerintem közel áll
Hozzád: láttál Te már egy 300 mm átmérőjű gumi
membrános hangszórót 20kHz-en szólni?:)
Pedig itt a mozgatott tömeg "csak papír" és nem
acél. Egyszerűen a léptető motor elve, és a
rotor tömeg behatárol. Persze motor és
motor között ezen korlátokon belül is óriási különbségek vannak. Mint mindenhol, itt is
igaz a valamit-valamiért elv.
ezt a témát a motor saját forgórész tömege, és
átmérője (tehetetlenségi nyomaték) felől.
Minden mozgó rendszerben a tömeg dinamikailag
meghatórozó. Ezen vezérlő oldalról semmilyen
elektronikai "bűvészkedéssel" nem lehet
segíteni. Egy példa, és ez szerintem közel áll
Hozzád: láttál Te már egy 300 mm átmérőjű gumi
membrános hangszórót 20kHz-en szólni?:)
Pedig itt a mozgatott tömeg "csak papír" és nem
acél. Egyszerűen a léptető motor elve, és a
rotor tömeg behatárol. Persze motor és
motor között ezen korlátokon belül is óriási különbségek vannak. Mint mindenhol, itt is
igaz a valamit-valamiért elv.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 13, 09:24
Írta: 000000000 Dátum 2007 május 13, 09:24
Így már én is jártam! Egyszer egy vevőnk kihívot, hogy szétcsúszások vannak a habvágógépénél a vágásások záródásánál! Én is az elektronika+szoftver párossal keztem és szinte az atomjaira szedtem mikor is nem találtam a jelenség okát. Kétségbeesésemben a gép elé leültem és csak néztem a motor tengelyét, amikor észrevettem, hogy irányváltásokkor a motor 1-2-őt lép mire a mechanika megindúl! Akkor jöttünk rá, hogy a felstiftelt fogaskerék "kottyan" meg a tengelyvégen! A stift kezdet elnyíródni!!!
A lényeg, mindig a rendszerlátásában (globális probléma keresésben) van![#whatever]
A lényeg, mindig a rendszerlátásában (globális probléma keresésben) van![#whatever]
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 13, 09:53
Írta: bmejdz9nu Dátum 2007 május 13, 09:53
Értem persze... jó a a hasonlatod is... :)
De a #1094-esben leírt 2 motor közül a Nema34 tud többet... magasabb fordulatra/nyomaték....
Az biztos törekedni kell a a kis induktivitásra... és ebből nagy áramok adódnak...
Elektronikai bűvészkedés: a tápfesz emelése megoldás lehet? és ha igen pontosan miért?
De a #1094-esben leírt 2 motor közül a Nema34 tud többet... magasabb fordulatra/nyomaték....
Az biztos törekedni kell a a kis induktivitásra... és ebből nagy áramok adódnak...
Elektronikai bűvészkedés: a tápfesz emelése megoldás lehet? és ha igen pontosan miért?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 13, 10:12
Írta: 000000000 Dátum 2007 május 13, 10:12
Péter! Hogy tisztábban lássál, és egyben
meg is lepődjél egy picit, a következő tesztmérést
javaslom: kössél a motorod egyik tekercsével sorba egy 0.05 Ohmos ellenállást, és nézd
meg rajta oszcilloszkóppal a jelalakot
különböző vezérlőknél, motoroknál, és
fordulatoknál. Sokat fogsz ebből okulni, hidd el, és egy csomó eddigi kérdésedre megkapod
a választ.
meg is lepődjél egy picit, a következő tesztmérést
javaslom: kössél a motorod egyik tekercsével sorba egy 0.05 Ohmos ellenállást, és nézd
meg rajta oszcilloszkóppal a jelalakot
különböző vezérlőknél, motoroknál, és
fordulatoknál. Sokat fogsz ebből okulni, hidd el, és egy csomó eddigi kérdésedre megkapod
a választ.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 13, 10:32
Írta: bmejdz9nu Dátum 2007 május 13, 10:32
egy kondit meg a motorra? :) Értem így is...
Beszerzek egy nagyon kis induktivitású és ellenállású motort (amilyen kicsit csak találok :)
Hogy 50V-ból megálljon az (erős) tuning... és ne legyen több mint 6A-os... és persze 8 kivezetéses kellene, hogy az én kis tesztjeimet elfogulatlanul tudjam játszani...
Most a H1 a sebesség/nyomaték rekorder... bipolár módban a 6 kivezetéses motorral...
... aztán szervózok majd... de az "evolució" is fontos... :) tudod kezdő vagyok...
Beszerzek egy nagyon kis induktivitású és ellenállású motort (amilyen kicsit csak találok :)
Hogy 50V-ból megálljon az (erős) tuning... és ne legyen több mint 6A-os... és persze 8 kivezetéses kellene, hogy az én kis tesztjeimet elfogulatlanul tudjam játszani...
Most a H1 a sebesség/nyomaték rekorder... bipolár módban a 6 kivezetéses motorral...
... aztán szervózok majd... de az "evolució" is fontos... :) tudod kezdő vagyok...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 13, 10:35
Írta: 000000000 Dátum 2007 május 13, 10:35
H1 bipoláris módban??? Húúú, ez engem is érdekel!!![#wow1][#vigyor3]
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 13, 10:40
Írta: bmejdz9nu Dátum 2007 május 13, 10:40
Jaj elírtam... Unipolár módban... nem találtam fel a spanyol viaszt :) Sajnos nem...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 13, 11:00
Írta: bmejdz9nu Dátum 2007 május 13, 11:00
Még lenne egy kérdésem... persze ez nem direkt "léptetőmotoros" dolog de majdnem...
Olyan "jósági" teszteket végeztetek e pl. a Mach-on, hogy... (kicsit nehéz lesz leírni..)
Pl. "vonalakat mar a marógép" pl. 300mm-eseket... (ezt kilehet előre számolni, hány lápés azaz hány impulzus a kimeneten azaz az LPT porton...)
Ha ezt egy órán keresztül csinálja ... akkor van e "elveszett" impulzus... (számláló az lpt-porton...) és ha van milyen ez a szám?
Mert semmi sem tökéletes.... gondolom...?
Olyan "jósági" teszteket végeztetek e pl. a Mach-on, hogy... (kicsit nehéz lesz leírni..)
Pl. "vonalakat mar a marógép" pl. 300mm-eseket... (ezt kilehet előre számolni, hány lápés azaz hány impulzus a kimeneten azaz az LPT porton...)
Ha ezt egy órán keresztül csinálja ... akkor van e "elveszett" impulzus... (számláló az lpt-porton...) és ha van milyen ez a szám?
Mert semmi sem tökéletes.... gondolom...?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2007 május 13, 11:12
Írta: svejk Dátum 2007 május 13, 11:12
Jó vicc!
Ha lenne hiba használhatatlan lenne!
Vannak itt olyan emberkék akik egy-egy domborművet 12-16 órán kersztül marnak.
(legnagyobb ellenség az áramszünet :) )
Ha lenne hiba használhatatlan lenne!
Vannak itt olyan emberkék akik egy-egy domborművet 12-16 órán kersztül marnak.
(legnagyobb ellenség az áramszünet :) )
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 13, 11:29
Írta: bmejdz9nu Dátum 2007 május 13, 11:29
Én egy óra alatt (azt hiszem) "fogtam" egyet...
(persze csak a mérőora leolvasásból gondolom... meg abból, hogy igen tuti a golyósorsó...)
... az pont egy század... most... de lehetne akár rosszabb is a helyzet... nem olyan lehetetlen ez... érdemes lenne...
Olvastam... ebben a műfajban a TCNC a legjobb...
... Mérni kellene de nincs számlálóm...
Az is lehet, hogy nem vették észre a "dombormű" faragásnál... :) ez sem lehetetlen... :)
A mérés az mérés....
(persze csak a mérőora leolvasásból gondolom... meg abból, hogy igen tuti a golyósorsó...)
... az pont egy század... most... de lehetne akár rosszabb is a helyzet... nem olyan lehetetlen ez... érdemes lenne...
Olvastam... ebben a műfajban a TCNC a legjobb...
... Mérni kellene de nincs számlálóm...
Az is lehet, hogy nem vették észre a "dombormű" faragásnál... :) ez sem lehetetlen... :)
A mérés az mérés....
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 16, 19:14
Írta: bmejdz9nu Dátum 2007 május 16, 19:14
Ez egy új fejlesztésű márkás motor:
Persze szép áron...

Technische Daten :
Typ : bipolar
Strom : 6,0 A / Phase
Haltemoment : 5,6 Nm
Widerstand : 0,35 Ohm / Phase
Induktivität : 2,7 mH / Phase
Wellendurchmesser : 12,00 mm
Wellenlänge : ca. 29 mm
Motormasse : 85 x 85 x 92,2 mm
Gewicht : 2,5 kg
Persze szép áron...
Technische Daten :
Typ : bipolar
Strom : 6,0 A / Phase
Haltemoment : 5,6 Nm
Widerstand : 0,35 Ohm / Phase
Induktivität : 2,7 mH / Phase
Wellendurchmesser : 12,00 mm
Wellenlänge : ca. 29 mm
Motormasse : 85 x 85 x 92,2 mm
Gewicht : 2,5 kg
Cím: Re:Léptetőmotor
Írta: Bicska Dátum 2007 május 16, 20:49
Írta: Bicska Dátum 2007 május 16, 20:49
Ilyenem van 3, csak a nagyobbikból.
Cím: Re:Léptetőmotor
Írta: Bicska Dátum 2007 május 16, 20:58
Írta: Bicska Dátum 2007 május 16, 20:58
Elnézést azt hiszem tévedtem, márkára nem stimmel, csak a burkolat tévesztett meg..
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 16, 21:45
Írta: bmejdz9nu Dátum 2007 május 16, 21:45
Hát igen talán a márka is számít... Ez SanyoDenki. Csak drága... nem is biztos, hogy arányosan...
De az adatok azok ám az érdekesek...
Régebben olyan motorok "futottak", hogy 5V volt ráírva... és kevés áram...
Ma 1,5V és nagy áram....
"Régebben" a léptető motornak léptetnie kellett...
"Ma" a léptetőtől az várjuk el, hogy ereje teljében forogjon mint egy "rendes" motor...
Ezt talán a kisebb induktivitásnak köszönhetjük... persze a vezérlőknek is fejlődnie kellett... és fejlődtek is...
De az adatok azok ám az érdekesek...
Régebben olyan motorok "futottak", hogy 5V volt ráírva... és kevés áram...
Ma 1,5V és nagy áram....
"Régebben" a léptető motornak léptetnie kellett...
"Ma" a léptetőtől az várjuk el, hogy ereje teljében forogjon mint egy "rendes" motor...
Ezt talán a kisebb induktivitásnak köszönhetjük... persze a vezérlőknek is fejlődnie kellett... és fejlődtek is...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 17, 06:21
Írta: 000000000 Dátum 2007 május 17, 06:21
Azért a "régiek" között is volt 1-1.1V-os példány jónéhány (sokszór volt a kezembe is ilyen)! Ezek 0.5Nm-esként 3.9A-esek voltak.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 17, 15:48
Írta: bmejdz9nu Dátum 2007 május 17, 15:48
Akkor csak a látszat, hogy egyre kisebb feszültségű motorok vannak a piacon? Tehát nem ez a "trendi" ?
(persze ezáltal induktivitás és ellenállás is csökkenik... az áram meg nő...)
(persze ezáltal induktivitás és ellenállás is csökkenik... az áram meg nő...)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 17, 18:41
Írta: 000000000 Dátum 2007 május 17, 18:41
Was kostet endlich der schöne, kraftige Stepper denn da?
(Deutsch auf Deutsch)
(Deutsch auf Deutsch)
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 17, 18:44
Írta: bmejdz9nu Dátum 2007 május 17, 18:44
mit Mwst: 120 Euro + Versandkosten.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 21, 09:56
Írta: 000000000 Dátum 2007 május 21, 09:56
Nem tudja vlk., hogyan tudnám ezeket a mocikat csatlakoztatni a H1-hez. Méregettem a tekercsek kozti ellenállást, de mindenféle kombinációban egyforma...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 21, 10:14
Írta: bmejdz9nu Dátum 2007 május 21, 10:14
Hűha.. 5 fázisú? Ez baj lesz...?
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 május 21, 10:28
Írta: 4mjnxdwuu Dátum 2007 május 21, 10:28
Sehogy
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 május 21, 10:32
Írta: bmejdz9nu Dátum 2007 május 21, 10:32
Mit lehet ezekkel csinálni? Létezik vezérlő hozzá? vagy áttekerni :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 21, 10:40
Írta: 000000000 Dátum 2007 május 21, 10:40
http://www.berger-lahr.com Ez a cég egy 5 fázisú
specialista is. (jó sok FET (minimum 10) kell
egy ilyen mocihoz, viszont sokkal jobb egy ilyen
rendszer, mint a 2 fázisú.
specialista is. (jó sok FET (minimum 10) kell
egy ilyen mocihoz, viszont sokkal jobb egy ilyen
rendszer, mint a 2 fázisú.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 21, 10:52
Írta: 000000000 Dátum 2007 május 21, 10:52
Ezt nem használhatod H1-hez (sajnos)!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 21, 11:06
Írta: 000000000 Dátum 2007 május 21, 11:06
Koszonom a hozzászólásokat, nem probléma, úgysem az enyém. Egy barátom épít gépet (nem tud magyarul), valahol osszeszedte és neki érdeklodtem meg.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2007 május 21, 18:30
Írta: Szalai György Dátum 2007 május 21, 18:30
Ha a barátodnak esetleg meg kell szabadulnia ezektől, vagy elcserelné őket, akkor értesits légyszives.
Köszönöm.
Köszönöm.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 21, 22:36
Írta: 000000000 Dátum 2007 május 21, 22:36
Ok! Megdumálom vele, de lehet, hogy nehéz lesz, elég keményfeju...[#conf]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 21, 22:37
Írta: 000000000 Dátum 2007 május 21, 22:37
Esetleg valami más léptecsre cserélni...?
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2007 május 22, 06:04
Írta: Szalai György Dátum 2007 május 22, 06:04
Szia Lóránt!
Azt hiszem a barátod feje, szépen puhul majd, ha megpróbál ezekhez összehozni egy vezérlőt.
Idő kérdése. Én hagynám, hadd puhuljon. Tudomásom szerint, itt a fórumon, eddig még senki nem vágta a fejszéjét ebbe a fába. Külföldön sem látok rá megoldást, és a szakirodalma sem bőséges, csak szűkséges.
Csak azt szerettem volna, hogy ha majd kedvére, eleget vesződött vele akkor beszéljünk róla.
Üdvözlet.
A keményfejűnek is. (Azzal lehet jól a falnak menni. Tudom, csináltam.)
Azt hiszem a barátod feje, szépen puhul majd, ha megpróbál ezekhez összehozni egy vezérlőt.
Idő kérdése. Én hagynám, hadd puhuljon. Tudomásom szerint, itt a fórumon, eddig még senki nem vágta a fejszéjét ebbe a fába. Külföldön sem látok rá megoldást, és a szakirodalma sem bőséges, csak szűkséges.
Csak azt szerettem volna, hogy ha majd kedvére, eleget vesződött vele akkor beszéljünk róla.
Üdvözlet.
A keményfejűnek is. (Azzal lehet jól a falnak menni. Tudom, csináltam.)
Cím: Re:Léptetőmotor
Írta: vthgizrff Dátum 2007 május 22, 07:27
Írta: vthgizrff Dátum 2007 május 22, 07:27
Van nekem is egy ilyen (öt kivezetéses) motorom, ha érdekel keress meg magánban
znagy@globonet.hu
znagy@globonet.hu
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 május 22, 07:30
Írta: 000000000 Dátum 2007 május 22, 07:30
Nem hiszem, hogy belekezd..., a hét végén jon haza, majd megbeszélem vele[#dumcsi]
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 05, 21:14
Írta: bmejdz9nu Dátum 2007 június 05, 21:14
Teszek fel egy pár kis vidóklippet az első V01.01-es "gépalvázról"...
A gépnek még nem is nevezhető... a T-nutos asztal sem, mert ezt maga a gép fogja "befejezni"... hogy a lehető legpontosabb legyen...:)
Motor tanulságok:
Tényleg a kisebb fesz, kisebb induktivitású, nagyobb áramú motorokból lehet többet kihozni...
Most szerintem elértem azt a határt aminél már nem tudok többet...
A múltkori "túlméretes" azaz 5,5Nm-es motorokkal "csak" 60mm/s sebességet tudtam elérni...
Most ezekkel a motorokkal amelyek "csak" 3Nm-esek... többet azaz max. 120mm/s! azaz 7200mm/perc!
A videókon 100mm/s-ra állítottam vissza "biztonsági okokból"... ez az érték stabilan "erőtől duzzadóan" tartható...
A gyorsulást is "vissza vettem" 80mS-ra...
Most a tápfesz (kapcs. ü. táp) kereken: 50V...
A mozgó asztal önsúlya is jelentős... ezt megterheltem +30Kg-al (búvár ólmok és a satu:) de ha én is ráülök akkor sincs semmi változás...:)
A videók szokásosan :) valamiért nagyon hangossak, zajossak...(fényképezőgéppel készült)... de azért majd a motort "lágy" azaz POM müa. tartókra fogom szerelni, hogy a rezonanciákat ne vigye át az asztalra! (van jobb ötletet?)
1. Videó
2. Videó
3. Videó
4. Videó
5. Videó
6. Videó
7. Videó - itt 120mm/s
8. Videó - itt 120mm/s
9. Videó
10. Videó
A golyósorsók a tökéletes együttfutás ellenére (a vezetőkkel) langyosodnak pedíg van benne zsír:)
Az alváz kap még merevítést... Minden porcikája saját gyártmány (BF20)... [#wave]
A Keming Technology léptető motor adatlapja.
A gépnek még nem is nevezhető... a T-nutos asztal sem, mert ezt maga a gép fogja "befejezni"... hogy a lehető legpontosabb legyen...:)
Motor tanulságok:
Tényleg a kisebb fesz, kisebb induktivitású, nagyobb áramú motorokból lehet többet kihozni...
Most szerintem elértem azt a határt aminél már nem tudok többet...
A múltkori "túlméretes" azaz 5,5Nm-es motorokkal "csak" 60mm/s sebességet tudtam elérni...
Most ezekkel a motorokkal amelyek "csak" 3Nm-esek... többet azaz max. 120mm/s! azaz 7200mm/perc!
A videókon 100mm/s-ra állítottam vissza "biztonsági okokból"... ez az érték stabilan "erőtől duzzadóan" tartható...
A gyorsulást is "vissza vettem" 80mS-ra...
Most a tápfesz (kapcs. ü. táp) kereken: 50V...
A mozgó asztal önsúlya is jelentős... ezt megterheltem +30Kg-al (búvár ólmok és a satu:) de ha én is ráülök akkor sincs semmi változás...:)
A videók szokásosan :) valamiért nagyon hangossak, zajossak...(fényképezőgéppel készült)... de azért majd a motort "lágy" azaz POM müa. tartókra fogom szerelni, hogy a rezonanciákat ne vigye át az asztalra! (van jobb ötletet?)
1. Videó
2. Videó
3. Videó
4. Videó
5. Videó
6. Videó
7. Videó - itt 120mm/s
8. Videó - itt 120mm/s
9. Videó
10. Videó
A golyósorsók a tökéletes együttfutás ellenére (a vezetőkkel) langyosodnak pedíg van benne zsír:)
Az alváz kap még merevítést... Minden porcikája saját gyártmány (BF20)... [#wave]
A Keming Technology léptető motor adatlapja.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 05, 21:56
Írta: 000000000 Dátum 2007 június 05, 21:56
Gratulálok Péter!
Ez igen szép munka!!!
Üdv.:
Áron
Ez igen szép munka!!!
Üdv.:
Áron
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 05, 22:51
Írta: bmejdz9nu Dátum 2007 június 05, 22:51
Köszi... de még a java hátra van...:)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 05, 23:17
Írta: 000000000 Dátum 2007 június 05, 23:17
többet azaz max. 120mm/s! azaz 7200mm/métert!
Gondolom 7200mm/perc akar lenni.
Szép munka! Nekem akkor lenne az igazi, ha nem a munka asztal mozogna (cibálodna).( mániákus fix asztal párti vagyok)
Gondolom 7200mm/perc akar lenni.
Szép munka! Nekem akkor lenne az igazi, ha nem a munka asztal mozogna (cibálodna).( mániákus fix asztal párti vagyok)
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 06, 07:50
Írta: bmejdz9nu Dátum 2007 június 06, 07:50
Igen már "átírtam" azaz 7200mm/perc... :) csak én mindíg mm/s-ben gondolkodok, mert a WinPC-NC így számol...
Ha emlékszel nagyot rágtam magamat a mozgó álló asztal kérdésén...
Ez egy kis munkaterületű gép lesz: 320x320mm + 30mm a hossz irányba... (ez a +30mm nem is írom miért...,de gondolhatod...)
Már gyűjtöm az alkatrészt a második géphez is... az álló asztalos lesz... mert nagyobb...
Ha most nem csinálom meg akkor, sosem...
A mozgó asztal előnyei - szerintem:(itt és most:) Cáfoljátok!
1. A mozgatott asztal súlya + várható munkadarab súlya = a kersztirányú hidon lévő Z-tengellyel és motor súlyával (kb.)
Ez mozgatott felépítmény esetén teljesen asszimetrikus... Egyik motor cipel mindent...
Ez azért jó mert pont feleződni fognak a terhelések...
2. Mozgó felépítménynél szerintem nem lehet ekkora (60-80mS) gyorsítást elérni... (most a jó beállítás=100mm/s-ra 80mS alatt...de többre is képes!)
3. "A kereszttartót" és a "felépítmény" akkkora súlyúra csinálom "amekkorára csak akarom": nem kell cibálni!!! (is itt jön vissza a nyeremény!)
De itt ami az érdekes és lényeges:
(amit még úgy tudom senki nem csinált itt a fórumon)
A mozgó aztal "meg van fordítva" = tehát az asztal alól "nem jön elő" az orsó és vezetők! Így teljesen védett a forgáccsal és hűtőanyaggal szemben...!
Ez nem olyan egyszerű megcsinálni és beállítani... mint gondoltam...:) nekem...:)
Ezért ez már a "2. alaplap"... sajnos...
Ha emlékszel nagyot rágtam magamat a mozgó álló asztal kérdésén...
Ez egy kis munkaterületű gép lesz: 320x320mm + 30mm a hossz irányba... (ez a +30mm nem is írom miért...,de gondolhatod...)
Már gyűjtöm az alkatrészt a második géphez is... az álló asztalos lesz... mert nagyobb...
Ha most nem csinálom meg akkor, sosem...
A mozgó asztal előnyei - szerintem:(itt és most:) Cáfoljátok!
1. A mozgatott asztal súlya + várható munkadarab súlya = a kersztirányú hidon lévő Z-tengellyel és motor súlyával (kb.)
Ez mozgatott felépítmény esetén teljesen asszimetrikus... Egyik motor cipel mindent...
Ez azért jó mert pont feleződni fognak a terhelések...
2. Mozgó felépítménynél szerintem nem lehet ekkora (60-80mS) gyorsítást elérni... (most a jó beállítás=100mm/s-ra 80mS alatt...de többre is képes!)
3. "A kereszttartót" és a "felépítmény" akkkora súlyúra csinálom "amekkorára csak akarom": nem kell cibálni!!! (is itt jön vissza a nyeremény!)
De itt ami az érdekes és lényeges:
(amit még úgy tudom senki nem csinált itt a fórumon)
A mozgó aztal "meg van fordítva" = tehát az asztal alól "nem jön elő" az orsó és vezetők! Így teljesen védett a forgáccsal és hűtőanyaggal szemben...!
Ez nem olyan egyszerű megcsinálni és beállítani... mint gondoltam...:) nekem...:)
Ezért ez már a "2. alaplap"... sajnos...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 06, 07:55
Írta: 000000000 Dátum 2007 június 06, 07:55
Gratula! milyen Vezérlőt használsz?
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 06, 08:11
Írta: bmejdz9nu Dátum 2007 június 06, 08:11
Vegyesen:)
H1 és egy "másik"... de még sok teszt van hátra...
Most 8 kivezetésesek az új motorok... így megnyílt a lehetőségem az "objektív" tesztekre és válsztásra... (mert előtte külön volt egy 4-es és egy 8-as...)
Még lenne ötletem a további sebességre és gyorsításra... de talán értelmetlen, mert nem tudok olyan mechanikát csinálni ami kibírná...
Megjegyzem, persze ezt tudtam:
A winPC-NC max. kimnete: 25 Khz... A német fejlesző szerint ezt nem lehet túllépni step/dir esetén, hogyha azt akarják, hogy tuti biztos legyen...
De ez nem baj... számoljunk... vagy? Ennél pontosabb gépet (azaz mechanikát)? Nem elméletben! Hobby szinten?
H1 és egy "másik"... de még sok teszt van hátra...
Most 8 kivezetésesek az új motorok... így megnyílt a lehetőségem az "objektív" tesztekre és válsztásra... (mert előtte külön volt egy 4-es és egy 8-as...)
Még lenne ötletem a további sebességre és gyorsításra... de talán értelmetlen, mert nem tudok olyan mechanikát csinálni ami kibírná...
Megjegyzem, persze ezt tudtam:
A winPC-NC max. kimnete: 25 Khz... A német fejlesző szerint ezt nem lehet túllépni step/dir esetén, hogyha azt akarják, hogy tuti biztos legyen...
De ez nem baj... számoljunk... vagy? Ennél pontosabb gépet (azaz mechanikát)? Nem elméletben! Hobby szinten?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 06, 08:22
Írta: 000000000 Dátum 2007 június 06, 08:22
Gratulálok! Nagyon szép, precíz és pontos munka! Mégse csak a szavak embere vagy...[#taps]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 06, 08:23
Írta: 000000000 Dátum 2007 június 06, 08:23
Szia Péter! Egészen jól viselkedik első
ránézésre ez a stephajtás, gratula.
Egy dolgot azért légyszi tegyél még meg, ekkor lehetsz igazán biztos a hajtásodban:
fordíts 90 fokot az egészen, mintha
Z tengely lenne. Nagyon kíváncsi lennék, hogy
így is tudod-e az állandó súly terhelést
okozó 20-30 kg-os tömeget 100 mm/s-el le-föl
mozgatni. Ha igen, akkor jön a gratulációm
második fele.
ránézésre ez a stephajtás, gratula.
Egy dolgot azért légyszi tegyél még meg, ekkor lehetsz igazán biztos a hajtásodban:
fordíts 90 fokot az egészen, mintha
Z tengely lenne. Nagyon kíváncsi lennék, hogy
így is tudod-e az állandó súly terhelést
okozó 20-30 kg-os tömeget 100 mm/s-el le-föl
mozgatni. Ha igen, akkor jön a gratulációm
második fele.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 06, 08:38
Írta: bmejdz9nu Dátum 2007 június 06, 08:38
Ó még hol a vég... :)
Ez csak egyenlőre egy "próbapad" valójában... :)
De megfogadtem lépésről-lépésre haladok... és ha valami nem ok. akkor korrigálom az elképzelést... Sok slejt... sok munka... sok hiba... :) De hát első gép... ez a baj...
Ez csak egyenlőre egy "próbapad" valójában... :)
De megfogadtem lépésről-lépésre haladok... és ha valami nem ok. akkor korrigálom az elképzelést... Sok slejt... sok munka... sok hiba... :) De hát első gép... ez a baj...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 06, 08:43
Írta: bmejdz9nu Dátum 2007 június 06, 08:43
Hát ezt most nem csinálom meg... (még gondolkozom)...
Rá kellene a súlyokat kötni akkor... A T-nut még keskenyebb, mert a gép fogja készre marni...:)
De van 50Kg-os digitális erőmérőm? csak mihez kössem és hogy, ne tegye tönkre? mert lefogni ketten sem bírtuk... Ez jó lenne?
De megjegyzem a Z-tengely és motor nem lesz 50 Kg... mert most ennyit mozgat vizszintesen a videón...
Rá kellene a súlyokat kötni akkor... A T-nut még keskenyebb, mert a gép fogja készre marni...:)
De van 50Kg-os digitális erőmérőm? csak mihez kössem és hogy, ne tegye tönkre? mert lefogni ketten sem bírtuk... Ez jó lenne?
De megjegyzem a Z-tengely és motor nem lesz 50 Kg... mert most ennyit mozgat vizszintesen a videón...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 06, 08:53
Írta: 000000000 Dátum 2007 június 06, 08:53
Kár, hogy nem teszed meg...
Ezt a teszt módszert semmi nem pótolja, és
egy hajlított fémkampó, vagy kötözés, amivel a
súlyokat ráakasztanád (nem kell mindet) nem
értem, miért akkora gond. De ha nem csinálod,
akkor nem, én csak javasoltam.
Ezt a teszt módszert semmi nem pótolja, és
egy hajlított fémkampó, vagy kötözés, amivel a
súlyokat ráakasztanád (nem kell mindet) nem
értem, miért akkora gond. De ha nem csinálod,
akkor nem, én csak javasoltam.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 06, 09:01
Írta: bmejdz9nu Dátum 2007 június 06, 09:01
megoldom délután... mert én is kiváncsi lettem... :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 06, 12:45
Írta: 000000000 Dátum 2007 június 06, 12:45
Nekem mindig fentartásaim voltak azzal, hogy a megmunkáló anyagot keljen cibálni.
Egy lassú (esetleg kézi megmunkálásnál még megértem), de a Te sebességednél és gorsulásodnál?
Nekem mindig az anyagok rögzítése az egyik nagy kihívás, ha meg még a cibálásra is tekintettel kellene lennem, hát....?
A hűtőfolyadékot is rázkódtatni?
Más!
Azért kíváncsi lennék egy kisebb motor mit tudna, hiszen nagyon kicsik az asztal méretei, és ilyen méreteknél könnyű párhuzamosságot, egytengelyűséget beállítani. Méteres gépeknél azért nehezebb és még nem tapasztaltam csapágy melegedést.
Ugyanis van egy érzésem, hogy a melegedést valami szorulás okozza.
Egy lassú (esetleg kézi megmunkálásnál még megértem), de a Te sebességednél és gorsulásodnál?
Nekem mindig az anyagok rögzítése az egyik nagy kihívás, ha meg még a cibálásra is tekintettel kellene lennem, hát....?
A hűtőfolyadékot is rázkódtatni?
Más!
Azért kíváncsi lennék egy kisebb motor mit tudna, hiszen nagyon kicsik az asztal méretei, és ilyen méreteknél könnyű párhuzamosságot, egytengelyűséget beállítani. Méteres gépeknél azért nehezebb és még nem tapasztaltam csapágy melegedést.
Ugyanis van egy érzésem, hogy a melegedést valami szorulás okozza.
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2007 június 06, 12:56
Írta: e3h0cv4ph Dátum 2007 június 06, 12:56
Szia Péter! Gratula a gépedhez!
Viszont osztom RC véleményét, hogy a csapágyazásnak és a golyós orsónak men kellene melegednie.
Amikor nem volt még rajt az orsón a léptetőmotor, kézzel könnyen lehetett hajtani?
Nézd meg, hogy tényleg nem szorul -e
Üdv: TT
Viszont osztom RC véleményét, hogy a csapágyazásnak és a golyós orsónak men kellene melegednie.
Amikor nem volt még rajt az orsón a léptetőmotor, kézzel könnyen lehetett hajtani?
Nézd meg, hogy tényleg nem szorul -e
Üdv: TT
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 06, 13:01
Írta: 000000000 Dátum 2007 június 06, 13:01
Azért a tesztek korrektségéhel a súlyokat (pláne a satut) fixen rögzíteni kellene az asztalhoz, mert ha meg tud csúszni (a videón jól látszik töbször is), akkor a mért gyorsítások és lassítások nem valós értékek!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 06, 13:05
Írta: 000000000 Dátum 2007 június 06, 13:05
Elég ha a T nútba rakol elé és utána csavart és közészorítod...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 06, 14:09
Írta: bmejdz9nu Dátum 2007 június 06, 14:09
Munkadarab cibálása: így megy minden "profi" CNC gép... itt a videó készletem... de legtöbb esetben mindkét irányba cibálják ! Miért?
Én is csak a BF20-nál jöttem rá...
Ez is csak egy "átmeneti helytakarékos" megoldás! Keress ellenpéldát! (nem gravír és faipari gépek között...)
Anyagrögzítés:
Fontos dolog! Használok satut, leszorító készletet és excentrikus szetet(!) Ez nem gond...
Hűtőfolyadék: A végígvezetése a viszonylag széles energialáncban lesz... Noga javaslat...
Sőt ebben az energiálncban megy még a szerszámcserélő levegője, és a motor hűtővíze is...
Motor: Kissebb motor? ez 1,7Kg!!! Egy kiló és hetven deka... (adatlap...)
Egytengelyüség:
nem is annyira melegszik... csak egy leheletet... kicsit olyan viccnek szántam:)(kicsit túloztam:) de valamennyire igen...pár fokot :)
Mikrométerrel, párhuzamos mérőhasábbokkal... ez volt a legnagyobb gond!
De egyszerű ellenőrízni a menetes orsó végét kézzel (vagy pl. nyomatékhatárolós akkus fúróval) tekerni... és itt egy nagyon kicsi hiba sem lehet... (THK HSR20 + 20mm-es THK golyósorsó) ezek nem engednek semmit! Hibának helye nincs!!!
Erre jólenne ötletek... mert egy hétigig is lehet ezzel játszadozni...
Ilyenkor nagyon jó ha gyári a csapágyház az orsón ! Egy hibával kevesebb lehetőség!
De egy biztos: egy és ugyanaz (egysikú!) Alu táblára kell szerlelni! Minden más megbukott nálam... Pl. alu profil...(majdnem jó...de mégsem az igazi) stb....
Én is csak a BF20-nál jöttem rá...
Ez is csak egy "átmeneti helytakarékos" megoldás! Keress ellenpéldát! (nem gravír és faipari gépek között...)
Anyagrögzítés:
Fontos dolog! Használok satut, leszorító készletet és excentrikus szetet(!) Ez nem gond...
Hűtőfolyadék: A végígvezetése a viszonylag széles energialáncban lesz... Noga javaslat...
Sőt ebben az energiálncban megy még a szerszámcserélő levegője, és a motor hűtővíze is...
Motor: Kissebb motor? ez 1,7Kg!!! Egy kiló és hetven deka... (adatlap...)
Egytengelyüség:
nem is annyira melegszik... csak egy leheletet... kicsit olyan viccnek szántam:)(kicsit túloztam:) de valamennyire igen...pár fokot :)
Mikrométerrel, párhuzamos mérőhasábbokkal... ez volt a legnagyobb gond!
De egyszerű ellenőrízni a menetes orsó végét kézzel (vagy pl. nyomatékhatárolós akkus fúróval) tekerni... és itt egy nagyon kicsi hiba sem lehet... (THK HSR20 + 20mm-es THK golyósorsó) ezek nem engednek semmit! Hibának helye nincs!!!
Erre jólenne ötletek... mert egy hétigig is lehet ezzel játszadozni...
Ilyenkor nagyon jó ha gyári a csapágyház az orsón ! Egy hibával kevesebb lehetőség!
De egy biztos: egy és ugyanaz (egysikú!) Alu táblára kell szerlelni! Minden más megbukott nálam... Pl. alu profil...(majdnem jó...de mégsem az igazi) stb....
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 06, 14:21
Írta: bmejdz9nu Dátum 2007 június 06, 14:21
Igen! A satu elmozdult de csak 120mm/s-nál... Ha jól emlékszem csak egyszer ekkor...
Viszont a jelentősebb súlyt az ólmok adták...
Arról nem csináltam videót amikor én is rajt ültem... :) Sokáig nem bírtam....:) Nem vagyk űrhajós...
De ha kivánjátok egy cementes zsákot ráfogatok gurtnival :)
Azt veszem észre mindenki fél a mozgó asztaltól... és amikor a marófej megy... a marószár...? azt ki és hogyan teszteli...? Ott is megvannak az erők? csak talán nem látványosan... :)
Viszont a jelentősebb súlyt az ólmok adták...
Arról nem csináltam videót amikor én is rajt ültem... :) Sokáig nem bírtam....:) Nem vagyk űrhajós...
De ha kivánjátok egy cementes zsákot ráfogatok gurtnival :)
Azt veszem észre mindenki fél a mozgó asztaltól... és amikor a marófej megy... a marószár...? azt ki és hogyan teszteli...? Ott is megvannak az erők? csak talán nem látványosan... :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 06, 14:26
Írta: 000000000 Dátum 2007 június 06, 14:26
1. hát ha nem melegszik, akkor és sem írtam semmit
2. a hűtőfolyadéknak nem a hozzávezetésére godoltam, hanem az asztalon összegyűlt rázására
3. a májusi Bpi kiállításon a gyártókkal kozultálva (profikkal): A MUNKADARAB ÁLLJON és a maró mozgási és forgási sebességének a technikai maximalizálása. Ekkor valósul meg a legoptimálisabb megmunkálási körülmény.
De igazad van abban, hogy nem kell mindig más véleményére adni. Biztos örömöd lesz ebben a konstrukcióban.
2. a hűtőfolyadéknak nem a hozzávezetésére godoltam, hanem az asztalon összegyűlt rázására
3. a májusi Bpi kiállításon a gyártókkal kozultálva (profikkal): A MUNKADARAB ÁLLJON és a maró mozgási és forgási sebességének a technikai maximalizálása. Ekkor valósul meg a legoptimálisabb megmunkálási körülmény.
De igazad van abban, hogy nem kell mindig más véleményére adni. Biztos örömöd lesz ebben a konstrukcióban.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 06, 14:38
Írta: 000000000 Dátum 2007 június 06, 14:38
Ezt egy egszeru peldaval ala tudom tamasztani:
Keramia. Asztal mozog a munkadarabbal. HSPS (nagy sebessegu mozgasok/iranyvaltasok). Iranyvaltasnal specialis esetekben megsinyli a munkadarab (szinte 0 az onntarto kepessege).
Keramia. Asztal mozog a munkadarabbal. HSPS (nagy sebessegu mozgasok/iranyvaltasok). Iranyvaltasnal specialis esetekben megsinyli a munkadarab (szinte 0 az onntarto kepessege).
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 06, 14:46
Írta: 000000000 Dátum 2007 június 06, 14:46
Úgy látom azért néha etetsz minket pl. izzók világítása frekiváltóval(svejk).
Most meg, hogy viccnek szántad a melegedést.
Most már óvatosabban fogok reagálni.
Most meg, hogy viccnek szántad a melegedést.
Most már óvatosabban fogok reagálni.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 06, 14:47
Írta: bmejdz9nu Dátum 2007 június 06, 14:47
2. Noga Spray hűtő! "1-2 dl. anyag kb. 1 órára - nincs mit össszegyűjteni... a hűtés megoldások rovatban az infók... és a Noga honlpaján.
Egy nagyon jó leírás van a Titex szerszámgyártó honlapján... hogy ők hogy... és miért...
De! gondoltam rá... ha mégsem lenne jó...
de ez legyen a legkevesebb gond... de akkor már szekrénye is lesz... a gyári profi CNC-eknél használt azonos megoldással...
3. Én is voltam a Mach Tech-en. Én meg csak mozgó asztalú gépeket láttam... lehet, hogy másik hallban jártunk :) Vagy elvakultan figyeltem :)
Majd a kereszthíd lesz egy örült bonyolult megoldás... mert kell a forgatóhoz a nagy magasság... de ritkán... de az alacsony marási stabilitás is! Na ettől már reszketek előre! (ezt igazából nem egy gépben kellene megoldani...:)
...ezért az egész kereszttartót majd fel-le lehet mozgatni! A Végállásokban prcíz ütközők (kb. 100-120mm-et)
Persze motorokkal, lineáris kicsi de erős vezetőkön...
A második gép "tisztán szokásos" felépítés lesz...
De itt azt akarom, hogy egy porcikája se legyen hasonló más konstrukcióval... ez benne a hobby...:) Ettől megyünk előre...:) Vagy?
Egy nagyon jó leírás van a Titex szerszámgyártó honlapján... hogy ők hogy... és miért...
De! gondoltam rá... ha mégsem lenne jó...
de ez legyen a legkevesebb gond... de akkor már szekrénye is lesz... a gyári profi CNC-eknél használt azonos megoldással...
3. Én is voltam a Mach Tech-en. Én meg csak mozgó asztalú gépeket láttam... lehet, hogy másik hallban jártunk :) Vagy elvakultan figyeltem :)
Majd a kereszthíd lesz egy örült bonyolult megoldás... mert kell a forgatóhoz a nagy magasság... de ritkán... de az alacsony marási stabilitás is! Na ettől már reszketek előre! (ezt igazából nem egy gépben kellene megoldani...:)
...ezért az egész kereszttartót majd fel-le lehet mozgatni! A Végállásokban prcíz ütközők (kb. 100-120mm-et)
Persze motorokkal, lineáris kicsi de erős vezetőkön...
A második gép "tisztán szokásos" felépítés lesz...
De itt azt akarom, hogy egy porcikája se legyen hasonló más konstrukcióval... ez benne a hobby...:) Ettől megyünk előre...:) Vagy?
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 06, 14:56
Írta: bmejdz9nu Dátum 2007 június 06, 14:56
Ezt írtam:
"A golyósorsók a tökéletes együttfutás ellenére (a vezetőkkel) langyosodnak pedíg van benne zsír:)"
Nehogy félre értsd... persze vicces gyerek vagyok...a langyosodás is melegség! Tehát érezhető...
(több órát cikázott a gép egyfolytában 100mm/s-al... lépesvesztés tesztnek...)
Nem írtam, hogy hűteni kell! de mondjuk már 300mm/s-nál el kellene... talán...
A Frekiváltót megérteni pedíg legjobban az izzókkal lehet pl. 1Hz-es üzemben... sokan azt sem tudják mi ez? Most ők is értik!
Ezért is jó az ilyen egyszerű megközelítés(ek)!
Nézd meg milyen kérdésnél "állt meg" a frekiváltó topik... érdekes nem? Tehát van még mit tanulni... mert nics válsz...
Svejk nincs odahaza... ha jól tudom...
Senki más nem tudja a választ?
"A golyósorsók a tökéletes együttfutás ellenére (a vezetőkkel) langyosodnak pedíg van benne zsír:)"
Nehogy félre értsd... persze vicces gyerek vagyok...a langyosodás is melegség! Tehát érezhető...
(több órát cikázott a gép egyfolytában 100mm/s-al... lépesvesztés tesztnek...)
Nem írtam, hogy hűteni kell! de mondjuk már 300mm/s-nál el kellene... talán...
A Frekiváltót megérteni pedíg legjobban az izzókkal lehet pl. 1Hz-es üzemben... sokan azt sem tudják mi ez? Most ők is értik!
Ezért is jó az ilyen egyszerű megközelítés(ek)!
Nézd meg milyen kérdésnél "állt meg" a frekiváltó topik... érdekes nem? Tehát van még mit tanulni... mert nics válsz...
Svejk nincs odahaza... ha jól tudom...
Senki más nem tudja a választ?
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 06, 16:38
Írta: bmejdz9nu Dátum 2007 június 06, 16:38
Egyébként azt hittem, hogy a T-nutos asztal szöget üt valakinek...hogy miért van darabokból összecsavarozva vagy hogy miért 2 szintes a magassága... :) vagy ez csak nekem érdekes...:)
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2007 június 06, 19:25
Írta: Motoros Dátum 2007 június 06, 19:25
Hát ez tényleg nagyon megy, én is gratulálok, de én is csak egy felet, mert nem nagyon akarom elhinni.
Megint elővettem a Vexta katalógust és tökre ugyanezt a motort gyártják.
Nema 34, tip: PK 296-E4.5 , 3.1 Nm, 6.3A/fázis, 1.4V 0.24ohm/fázis 1,7 kg, .
A karakterisztikája szerint ennek a motornak 1500f/min nél alig 0.5 Nm a nyomatéka parallel üzemben miközben írják hogy a tápfesz 60 V és az áram állandó: 6.5A.
Tehát elég e ez ekkora tömeg ráncigálásához--szerintem nem-- akkor ez a motor 1500-as fordulaton 3-4 szer annyit tud mint a szokásos motorok. Ha ez így van akkor az adatlapján ezt miért nem reklámozza piros betűkkel az ipsze.
Vagy valahol máshol van a titok?
Megint elővettem a Vexta katalógust és tökre ugyanezt a motort gyártják.
Nema 34, tip: PK 296-E4.5 , 3.1 Nm, 6.3A/fázis, 1.4V 0.24ohm/fázis 1,7 kg, .
A karakterisztikája szerint ennek a motornak 1500f/min nél alig 0.5 Nm a nyomatéka parallel üzemben miközben írják hogy a tápfesz 60 V és az áram állandó: 6.5A.
Tehát elég e ez ekkora tömeg ráncigálásához--szerintem nem-- akkor ez a motor 1500-as fordulaton 3-4 szer annyit tud mint a szokásos motorok. Ha ez így van akkor az adatlapján ezt miért nem reklámozza piros betűkkel az ipsze.
Vagy valahol máshol van a titok?
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2007 június 06, 19:27
Írta: Motoros Dátum 2007 június 06, 19:27
Hát ez tényleg nagyon megy, én is gratulálok, de én is csak egy felet, mert nem nagyon akarom elhinni.
Megint elővettem a Vexta katalógust és tökre ugyanezt a motort gyártják.
Nema 34, tip: PK 296-E4.5 , 3.1 Nm, 6.3A/fázis, 1.4V 0.24ohm/fázis 1,7 kg, .
A karakterisztikája szerint ennek a motornak 1500f/min nél alig 0.5 Nm a nyomatéka parallel üzemben miközben írják hogy a tápfesz 60 V és az áram állandó: 6.5A.
Tehát elég e ez ekkora tömeg ráncigálásához--szerintem nem-- akkor ez a motor 1500-as fordulaton 3-4 szer annyit tud mint a szokásos motorok. Ha ez így van akkor az adatlapján ezt miért nem reklámozza piros betűkkel az ipsze.
Vagy valahol máshol van a titok?
Megint elővettem a Vexta katalógust és tökre ugyanezt a motort gyártják.
Nema 34, tip: PK 296-E4.5 , 3.1 Nm, 6.3A/fázis, 1.4V 0.24ohm/fázis 1,7 kg, .
A karakterisztikája szerint ennek a motornak 1500f/min nél alig 0.5 Nm a nyomatéka parallel üzemben miközben írják hogy a tápfesz 60 V és az áram állandó: 6.5A.
Tehát elég e ez ekkora tömeg ráncigálásához--szerintem nem-- akkor ez a motor 1500-as fordulaton 3-4 szer annyit tud mint a szokásos motorok. Ha ez így van akkor az adatlapján ezt miért nem reklámozza piros betűkkel az ipsze.
Vagy valahol máshol van a titok?
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 06, 19:43
Írta: bmejdz9nu Dátum 2007 június 06, 19:43
Ez olyan mint az aluminium fűrész... :) Azt sem hitted... de már láttad a mintát...:)
Gondolod felgyorsítottam a videót? :)
Pedíg igencsak úgy néz ki mintha menne...
Én sem gondoltam előre ezt a sebességet!
A célom "csak" stabilan 75mm/s volt... 100mm/s lett :) (120mm/s-nál már csak éppen megy, igaz terhelve 50kg-al de le lehet fogni...)
A tápfeszt kellene még emelni :) és jó lesz marómotornak...is :)
Ezt a vextra katalógust, ha pdf. átküldhetnéd...
Most szerelem függöleges tesztre... Tibi ajánlotta...
A titok... szerintem a motorban van... egyre jobbakat csinálnak... csak még ezek nem "gyűrűztek be" hozzánk...
Ezeket már a nagyáramú vezérlőkhöz gyártják...
Régebben fordítva volt... a vezérlőket gyártottaák a motorokhoz... pl. A Nanotech 130V-os vezérlője... szerintem...
Gondolod felgyorsítottam a videót? :)
Pedíg igencsak úgy néz ki mintha menne...
Én sem gondoltam előre ezt a sebességet!
A célom "csak" stabilan 75mm/s volt... 100mm/s lett :) (120mm/s-nál már csak éppen megy, igaz terhelve 50kg-al de le lehet fogni...)
A tápfeszt kellene még emelni :) és jó lesz marómotornak...is :)
Ezt a vextra katalógust, ha pdf. átküldhetnéd...
Most szerelem függöleges tesztre... Tibi ajánlotta...
A titok... szerintem a motorban van... egyre jobbakat csinálnak... csak még ezek nem "gyűrűztek be" hozzánk...
Ezeket már a nagyáramú vezérlőkhöz gyártják...
Régebben fordítva volt... a vezérlőket gyártottaák a motorokhoz... pl. A Nanotech 130V-os vezérlője... szerintem...
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2007 június 06, 20:00
Írta: Motoros Dátum 2007 június 06, 20:00
Nekem csak papíralakban van meg, de a www.orientalmotor.co.jp helyen biztos fentvan.
Remélem igazad van, de azért a 7 m/perc az soknak tűnik.
Remélem igazad van, de azért a 7 m/perc az soknak tűnik.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 06, 21:00
Írta: bmejdz9nu Dátum 2007 június 06, 21:00
"Csak" 6000mm/perc azaz 100mm/s! felette lefogható! Többet nem merek mondani! De a gyorsítás az érték: 80mS (persze 60mS-ot is tud de.. 80 az tuti)
Függöleges teszt feltöltés alatt ! (lassú a netem...)
Tibinek igaza volt ez tényleg nehezebb feladat! De... :)
Függöleges teszt feltöltés alatt ! (lassú a netem...)
Tibinek igaza volt ez tényleg nehezebb feladat! De... :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 06, 21:12
Írta: 000000000 Dátum 2007 június 06, 21:12
Nagyon kiváncsi vagyok!
Tibornak mindíg igaza van.
Tibornak mindíg igaza van.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 06, 21:13
Írta: 000000000 Dátum 2007 június 06, 21:13
kíváncsi
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 06, 21:25
Írta: 000000000 Dátum 2007 június 06, 21:25
és mindig :))
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 06, 21:25
Írta: bmejdz9nu Dátum 2007 június 06, 21:25
Függöleges teszt. (#1126-os kiegészítése)
Igen Tibinek igaza volt ez nehezebb dolog...
Köszönettel neki mert ez még jól jöhet a Z-tengely tervezésekor!
Elöljáróban:
Az asztal olyan nehéz már, hogy alíg bírtam megemelni (ez nem vicc még mindíg oda vagyok... hogyan viszem el a talira?)... majd megmérem...
de kb. 50 kg lehet már... ebből a mozgó rész a java.. kb. min. 30Kg... Ezt megterheltem további 24 Kg búvárólommal...
tehát a mozgatott tömeg a videón kb. 55 kg fel és le....
Az eredmény "csak" 80mm/s azaz 4800mm/perc....
Ez azért nem rossz mert, ha súlyt csökkentem akkor többet tud... és nem lesz a Z-tengely és a marómotor nálam 55Kg, sőt... !!!!
Videó 1 - 80mm/s - 80mS gyorsítás - 1 másodperces szünetekkel
Video 2 - 80mm/s - 80mS gyorsítás - szünetek nélkül
Igen Tibinek igaza volt ez nehezebb dolog...
Köszönettel neki mert ez még jól jöhet a Z-tengely tervezésekor!
Elöljáróban:
Az asztal olyan nehéz már, hogy alíg bírtam megemelni (ez nem vicc még mindíg oda vagyok... hogyan viszem el a talira?)... majd megmérem...
de kb. 50 kg lehet már... ebből a mozgó rész a java.. kb. min. 30Kg... Ezt megterheltem további 24 Kg búvárólommal...
tehát a mozgatott tömeg a videón kb. 55 kg fel és le....
Az eredmény "csak" 80mm/s azaz 4800mm/perc....
Ez azért nem rossz mert, ha súlyt csökkentem akkor többet tud... és nem lesz a Z-tengely és a marómotor nálam 55Kg, sőt... !!!!
Videó 1 - 80mm/s - 80mS gyorsítás - 1 másodperces szünetekkel
Video 2 - 80mm/s - 80mS gyorsítás - szünetek nélkül
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 06, 21:55
Írta: 000000000 Dátum 2007 június 06, 21:55
Szia Péter!
Köszi, hogy megcsináltad ezt a tesztet,
tanulságos talán másoknak is.
Jön a gratulációm második fele, ügyes vagy!
Ez egy igen jó minőségű léptető motoros hajtás,
büszke lehetsz rá. Nagyon jó ez a motor,
sikerült egy klassz típust találnod.
Én megmondom őszintén, nem hittem volna, hogy
bírja a 80 mm/s sebességet még ilyen terhelés
mellett.
Köszi, hogy megcsináltad ezt a tesztet,
tanulságos talán másoknak is.
Jön a gratulációm második fele, ügyes vagy!
Ez egy igen jó minőségű léptető motoros hajtás,
büszke lehetsz rá. Nagyon jó ez a motor,
sikerült egy klassz típust találnod.
Én megmondom őszintén, nem hittem volna, hogy
bírja a 80 mm/s sebességet még ilyen terhelés
mellett.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 06, 22:05
Írta: bmejdz9nu Dátum 2007 június 06, 22:05
Na Tibi ezt is megértem... Most aztán akkora mellényem lesz! :)
Tényleg a motor jó... sokat kerestem... azokból az infókból kindúlva amiket írtatok... pedíg ez is csak egy kínai motor... gondolom... tehát semmi nagy márka...
... szerinded 80V tápról mit csinálna? mennyivel várható több? mennyit jelenthet 50V és 80V között? Számíthat ez?... de talán a mechanika úgysem bírná... :)
Majd ilyen erősségűre megcsinálni a kereszt tengelyt... hogy le ne essen... :)
Tényleg a motor jó... sokat kerestem... azokból az infókból kindúlva amiket írtatok... pedíg ez is csak egy kínai motor... gondolom... tehát semmi nagy márka...
... szerinded 80V tápról mit csinálna? mennyivel várható több? mennyit jelenthet 50V és 80V között? Számíthat ez?... de talán a mechanika úgysem bírná... :)
Majd ilyen erősségűre megcsinálni a kereszt tengelyt... hogy le ne essen... :)
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2007 június 06, 22:13
Írta: Kristály Árpád Dátum 2007 június 06, 22:13
Hallihó Péter!
Gratula!!!
Már attól féltem, hogy mehetek megint Sopronba, mint álltalad kikiálltott hivatásos tesztelő.
A videód igen tanulságos...... sőt meggyőző!
Köszönjük a fáradozásod, hiszen ebből mindenki tanulhat....azért arra majd kiváncsi leszek milyen megmunkáló motorod lesz a végén, amivel ez a sebesség kiaknázhatód!
Apropó..... Meggyőzted Tibor45-öt ami szerintem külön érdem! (jó értelemben!)
Hallihó!
Gratula!!!
Már attól féltem, hogy mehetek megint Sopronba, mint álltalad kikiálltott hivatásos tesztelő.
A videód igen tanulságos...... sőt meggyőző!
Köszönjük a fáradozásod, hiszen ebből mindenki tanulhat....azért arra majd kiváncsi leszek milyen megmunkáló motorod lesz a végén, amivel ez a sebesség kiaknázhatód!
Apropó..... Meggyőzted Tibor45-öt ami szerintem külön érdem! (jó értelemben!)
Hallihó!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 06, 22:29
Írta: 000000000 Dátum 2007 június 06, 22:29
Nézd, én azt javaslom, ne kínozd ezt a
"szerencsétlen" motort tovább, így is a határon
dolgozott.
Pár számadattal is alátámasztanám ezt.
Amikor felfelé mozgott, akkor 22W hasznos
teljesítményt adott le a motorod, és már
csak 0.44 Nm nyomaték mellett. Sajna a hatásfok
ekkor már katasztrófális, ha csak szerény 3
Amper tápoldali árammal számolunk,
akkor is csak ~15%. A többi gyakorlatilag hővé
alakul, nagyon forró lenne a motorod hosszabb
távon.
Összességében hidd el, ez így is egy kisebb
csoda egy ilyen léptető motortól. Ha ezeket a sebességeket
még kb. megfelezed, akkor maximális biztonsággal,
lépésvesztés minimális kockázata nélkül
használhatod majd a teljes (X, Y, Z) gépedet.
"szerencsétlen" motort tovább, így is a határon
dolgozott.
Pár számadattal is alátámasztanám ezt.
Amikor felfelé mozgott, akkor 22W hasznos
teljesítményt adott le a motorod, és már
csak 0.44 Nm nyomaték mellett. Sajna a hatásfok
ekkor már katasztrófális, ha csak szerény 3
Amper tápoldali árammal számolunk,
akkor is csak ~15%. A többi gyakorlatilag hővé
alakul, nagyon forró lenne a motorod hosszabb
távon.
Összességében hidd el, ez így is egy kisebb
csoda egy ilyen léptető motortól. Ha ezeket a sebességeket
még kb. megfelezed, akkor maximális biztonsággal,
lépésvesztés minimális kockázata nélkül
használhatod majd a teljes (X, Y, Z) gépedet.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 06, 22:40
Írta: bmejdz9nu Dátum 2007 június 06, 22:40
Hol marómotor... hol léptető...hol szervó...hol frekiváltó... bárcsak már esztergálni tudnék... :) Mindenevő vagyok... :)
Szerintem is jó! (most tudod nagy mellényem van lásd. #1160... :)
és tudod mi a röhely ez egy: egy kiló hetven dekás motor... !!! Na de az adatlapja magáért beszél...(#1126)
Most a függöleges tesztnél már a 45 fokos hőmérsékletet is elérte.... :) 1 óra után...:)
Most az asztaltól kellene rezgés mentesíteni... műanyag? Gumi? távtartó? Ezek persze kis gondnak tünnek de nem az... csak a látszatra...
Megmunkáló motor:
hát ez az! annak is menni kell mint a meszes... mert hiába a gyors gép ha az nem tud!
két motort tervezek rá: HF 20.000-60.000 rpm... és az alsó fordultokra egy kb. 2.000-20.000 rpm motort... Lasabb nem lesz ezen a gépen... az a másik gépen lesz... az már persze mozgó felépítménnyel... és nagyobb munkatérrel...
Viszont ez a gép lesz a "habostorta"...
Talán sosem verem mégegyszer ilyen bonyodalomba magamat:)
A tervek nagyok:
automata szerszámcserélő...(ez tudod nem az én érdemem lesz teljesen, mert tudja a HF motor...)
De a 4. forgató tengely.... Harmonic Drive-al és a magasság állítható híd... az már igen! :)
Szerintem is jó! (most tudod nagy mellényem van lásd. #1160... :)
és tudod mi a röhely ez egy: egy kiló hetven dekás motor... !!! Na de az adatlapja magáért beszél...(#1126)
Most a függöleges tesztnél már a 45 fokos hőmérsékletet is elérte.... :) 1 óra után...:)
Most az asztaltól kellene rezgés mentesíteni... műanyag? Gumi? távtartó? Ezek persze kis gondnak tünnek de nem az... csak a látszatra...
Megmunkáló motor:
hát ez az! annak is menni kell mint a meszes... mert hiába a gyors gép ha az nem tud!
két motort tervezek rá: HF 20.000-60.000 rpm... és az alsó fordultokra egy kb. 2.000-20.000 rpm motort... Lasabb nem lesz ezen a gépen... az a másik gépen lesz... az már persze mozgó felépítménnyel... és nagyobb munkatérrel...
Viszont ez a gép lesz a "habostorta"...
Talán sosem verem mégegyszer ilyen bonyodalomba magamat:)
A tervek nagyok:
automata szerszámcserélő...(ez tudod nem az én érdemem lesz teljesen, mert tudja a HF motor...)
De a 4. forgató tengely.... Harmonic Drive-al és a magasság állítható híd... az már igen! :)
Cím: Re:Léptetőmotor
Írta: dg8n4i8x Dátum 2007 június 06, 22:48
Írta: dg8n4i8x Dátum 2007 június 06, 22:48
Basszus, hogy le vagyok maradva... Alig van időm mostanában beleolvasni a fórumba... :(
Hát Péter ez tényleg nagyon állat!!! Az a kis asztal elég robosztus súlyok nélkül is! Bár amikor én láttam akkor még csak a BF20-on ment jobbra balra. :) Lenyűgöző ez a teljesítmény...
Szó esett újra itt a mozgó, nem mozgó asztalról, Szerintem ahogy ezt már kifejtettem kis gépre célszerűbb a mozgó asztal mert a híd tömege jóval meghaladja az asztal és a munkadarab tömegét, persze egy nagyobb asztal esetén mindenképp jobb ha a híd megy felette. Szerintem az anyagot ugyanúgy kell rögzíteni mozgó asztalnál és állónál is, mert a forgácsolási erő nem változik attól, hogy melyik mozog... Egy kis gépnél kompromisszumokat kell kötni, ha többcélú felhasználást szeretnénk. Ez csak az én véleményem, nem akarok senkit meggyőzni! Annó én is rengeteget gondolkodtam ezen és csak akkor döntöttem amikor már megvoltak az anyagok nagyjából, tudtam kb mekkora súlyok lesznek...
Szóval mégegyszer Gratula!
Hát Péter ez tényleg nagyon állat!!! Az a kis asztal elég robosztus súlyok nélkül is! Bár amikor én láttam akkor még csak a BF20-on ment jobbra balra. :) Lenyűgöző ez a teljesítmény...
Szó esett újra itt a mozgó, nem mozgó asztalról, Szerintem ahogy ezt már kifejtettem kis gépre célszerűbb a mozgó asztal mert a híd tömege jóval meghaladja az asztal és a munkadarab tömegét, persze egy nagyobb asztal esetén mindenképp jobb ha a híd megy felette. Szerintem az anyagot ugyanúgy kell rögzíteni mozgó asztalnál és állónál is, mert a forgácsolási erő nem változik attól, hogy melyik mozog... Egy kis gépnél kompromisszumokat kell kötni, ha többcélú felhasználást szeretnénk. Ez csak az én véleményem, nem akarok senkit meggyőzni! Annó én is rengeteget gondolkodtam ezen és csak akkor döntöttem amikor már megvoltak az anyagok nagyjából, tudtam kb mekkora súlyok lesznek...
Szóval mégegyszer Gratula!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 06, 22:49
Írta: bmejdz9nu Dátum 2007 június 06, 22:49
Valószinű igazad van...
A 25x névleges motoráram = tápfeszt egy gyártó sem ajánlja átlépni... valószínű meg van az oka....
A melegedés most minimális... sőt nagyon kevés!
A felvett áramot nem néztem... nem is tudom hogyan mérjem... mert impulzusban veszi fel...
De a táp meg sem langyosodik...
Lehet, hogy a jó eredményekben a kapcsolóüzemű táp is sokat számít?! Jó lenne ezt tudni!
A 25x névleges motoráram = tápfeszt egy gyártó sem ajánlja átlépni... valószínű meg van az oka....
A melegedés most minimális... sőt nagyon kevés!
A felvett áramot nem néztem... nem is tudom hogyan mérjem... mert impulzusban veszi fel...
De a táp meg sem langyosodik...
Lehet, hogy a jó eredményekben a kapcsolóüzemű táp is sokat számít?! Jó lenne ezt tudni!
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 06, 22:57
Írta: 4mjnxdwuu Dátum 2007 június 06, 22:57
Hali, írtad, hogy nem viszed talira....
Hát én se. A tiéd se lesz könnyű ha teljesen kész lesz ( ha merevet is akarsz )
Az enyémnél
kb min 30 kg vasláb
kb 160 kg beton alap
kb 70 kg öntöttvas Y tartó
kb xx kg alu X tartó
kb 29 kg asztal (megmunkálás előtt (36 kg)
kb 45 kg híd tartó
kb xx kg híd
kb 10-valamennyi Z
+ a nagy maró fej ha lesz...

Hát én se. A tiéd se lesz könnyű ha teljesen kész lesz ( ha merevet is akarsz )
Az enyémnél
kb min 30 kg vasláb
kb 160 kg beton alap
kb 70 kg öntöttvas Y tartó
kb xx kg alu X tartó
kb 29 kg asztal (megmunkálás előtt (36 kg)
kb 45 kg híd tartó
kb xx kg híd
kb 10-valamennyi Z
+ a nagy maró fej ha lesz...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 06, 23:05
Írta: bmejdz9nu Dátum 2007 június 06, 23:05
Ez a mozgó asztal "kontra" álló asztal szépen megosztotta a csapatot! Ebből volt már többször "porfelhő"...
Én is egy hónapig rágtam magamat... :)
A "profik" minden irányba mozgatják... erre van sok példa... ez szerintem egyértelmű...
Hogy miért? Azt majd a BF20 topikban kifejtem... de egyenlőre annyit: tegyél a BF20-ra egy mérőórát... és csodálkozz mert 0.00mm lesz a hiba... és gondolkozz... nem a gép jó... máshol van elásva a titok...:)
Na ez a mozgó asztal is egy félmegoldás...de már a "profik" is használgatják... mert helytakarékos... a többit már leírtam...
Ha jól tudom neked is mozgó asztalos van...:)
Itt annyi a "más" mint pl. hobby környezetben az alkoholista szervós ULI gépénél... nem jönnek elő a tengelyek mert fordítva van... mint BF20 és "profik"...
Hátránya is van... ahogy írtad... a méret... de mégis csinálják egész nagyban is... (lásd. videóim a neten)
Persze én sem akarok senkit sem meggyőzni:) Ez a dolog szépsége mindenki másként csinálja!!!
Én is egy hónapig rágtam magamat... :)
A "profik" minden irányba mozgatják... erre van sok példa... ez szerintem egyértelmű...
Hogy miért? Azt majd a BF20 topikban kifejtem... de egyenlőre annyit: tegyél a BF20-ra egy mérőórát... és csodálkozz mert 0.00mm lesz a hiba... és gondolkozz... nem a gép jó... máshol van elásva a titok...:)
Na ez a mozgó asztal is egy félmegoldás...de már a "profik" is használgatják... mert helytakarékos... a többit már leírtam...
Ha jól tudom neked is mozgó asztalos van...:)
Itt annyi a "más" mint pl. hobby környezetben az alkoholista szervós ULI gépénél... nem jönnek elő a tengelyek mert fordítva van... mint BF20 és "profik"...
Hátránya is van... ahogy írtad... a méret... de mégis csinálják egész nagyban is... (lásd. videóim a neten)
Persze én sem akarok senkit sem meggyőzni:) Ez a dolog szépsége mindenki másként csinálja!!!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 06, 23:11
Írta: bmejdz9nu Dátum 2007 június 06, 23:11
Én viszem! (azaz szeretném)
Úgy tervezem, hogy bontható (LEGO) rendszerű legyen!
Nem kispályás a géped! Beton - öntött vas? Videó van róla? Mert nem kilóra megy... :)
Én szomorú vagyok attól amilyen nehéz lett az eddigi "eredményem"...
Úgy tervezem, hogy bontható (LEGO) rendszerű legyen!
Nem kispályás a géped! Beton - öntött vas? Videó van róla? Mert nem kilóra megy... :)
Én szomorú vagyok attól amilyen nehéz lett az eddigi "eredményem"...
Cím: Re:Léptetőmotor
Írta: dg8n4i8x Dátum 2007 június 06, 23:21
Írta: dg8n4i8x Dátum 2007 június 06, 23:21
Ez az! Több megoldás több tapasztalat! Az ahogy te oldottad meg azért is jó mert a főorsó alatt az alátámasztás minden helyzetben hasonló, azaz kisebb a lehetőség az asztal belógására... A másik az, hogy így a sínek és az orsó is védettebb helyen van a forgácsoktól hűtőfolyadéktól... Ha kicserélem majd az X tengelyemen a síneket rendes lineárokra akkor én is így szeretném megoldani majd...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 06, 23:33
Írta: 000000000 Dátum 2007 június 06, 23:33
Gondolom mindenki észrevette, hogy két szintes az asztal, csak ... senki sem kérdezte meg. Hát én azért megkérdezném...[#conf] Gondolkoztam, de eddig még nem jottem rá, szabad a gazda...
Cím: Re:Léptetőmotor
Írta: 3vv2btrhv Dátum 2007 június 06, 23:44
Írta: 3vv2btrhv Dátum 2007 június 06, 23:44
szia Trapista
Nekem a te géped nagyon tetszik a harmonikás megoldás meg igazán profi !!!
Azért remélem egyszer megnézhetem !! Csak 10 km -er a távolság közötünk de fényévekkel vagy elötem .
péter
gratulálok én is és a vezérlöt miért takartad le ??
Tibor
Nekem a te géped nagyon tetszik a harmonikás megoldás meg igazán profi !!!
Azért remélem egyszer megnézhetem !! Csak 10 km -er a távolság közötünk de fényévekkel vagy elötem .
péter
gratulálok én is és a vezérlöt miért takartad le ??
Tibor
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 06, 23:48
Írta: 000000000 Dátum 2007 június 06, 23:48
Csak úgy uldogélek a WC-n.... és nem hagyott békén a dolog. Csak nem a 4. tengelynek csináltál helyet, de akkor sem volna értelme magasabbra tenni... ...esetleg alátámasztás miatt... ... hát, nemtuom...[#fejvakaras][#falbav]
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 06, 23:55
Írta: 4mjnxdwuu Dátum 2007 június 06, 23:55
Az igaz, hogy nem kilóra megy de mintha neked is mocorgott volna a videón az a valami amire rátetted. (csak gondolj bele ha nagy sebességről indítod, nagy gyorsulással a jópár kilós asztalt +munkadarabot...) nekem előtte 80-as U vasból volt a keret,120-al összekötve + a híd is 80-as volt és bebólintott indításkor jópár századot. Nem hittem volna (gravírozáskor, felületkövető nélkül ha nem ment elég mélyre kézrátétellel + pici nyomással korigálni tudtam.... (igaz a lábai is közel voltak, bár azmiatt csak inbolygott a gumibakokon.)
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 07, 00:09
Írta: bmejdz9nu Dátum 2007 június 07, 00:09
Asztal...Igen... azt hitem már nem szúr szemet.... pedíg ez volt a "legcikibb" kifilózni... mármint nekem... :)
a teljes "felső" magaságban 320x320mm... ez pár centivel feljebb van...
Azért hogy a gép saját maga be tudja majd síkba marni... teljes méretben... hogy a lehető legpontosabb legyen... (oldalt- felül - körbe, hogy lehessen könnyen referenciát mérni...)
A második szint: (lejjebb, elöl és hátul) ez három eshetőség miatt lett így:
1. ide kerül a 4. forgató tengely mechanikája és a szemközti oldalra a csúcs...
2. Ha a munkadarab 320x320mmm (teljes munkaterületű) akkor is meg lehessen fogatni...
3. a szerszámcserélő tartója...
és miért lett darabokból összerakva? hogy lehessen fixre marni... (feszültség mentes... stb...) De még egyszer nem csinálnám és senkinek nem ajánlanám...
őrült munka... sok csavar... menet... fémragasztó....
a teljes "felső" magaságban 320x320mm... ez pár centivel feljebb van...
Azért hogy a gép saját maga be tudja majd síkba marni... teljes méretben... hogy a lehető legpontosabb legyen... (oldalt- felül - körbe, hogy lehessen könnyen referenciát mérni...)
A második szint: (lejjebb, elöl és hátul) ez három eshetőség miatt lett így:
1. ide kerül a 4. forgató tengely mechanikája és a szemközti oldalra a csúcs...
2. Ha a munkadarab 320x320mmm (teljes munkaterületű) akkor is meg lehessen fogatni...
3. a szerszámcserélő tartója...
és miért lett darabokból összerakva? hogy lehessen fixre marni... (feszültség mentes... stb...) De még egyszer nem csinálnám és senkinek nem ajánlanám...
őrült munka... sok csavar... menet... fémragasztó....
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 07, 00:14
Írta: bmejdz9nu Dátum 2007 június 07, 00:14
Ez igaz...
Még gőzöm sincs mire rakom... talán még szekrény is kell majd neki? De utáltam a "régi" német gépem után a porszívózást...
És ha nem jön be a spray hűtés... akkor aztán lesz minden... főleg szekrény neki... :)
Még gőzöm sincs mire rakom... talán még szekrény is kell majd neki? De utáltam a "régi" német gépem után a porszívózást...
És ha nem jön be a spray hűtés... akkor aztán lesz minden... főleg szekrény neki... :)
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2007 június 07, 17:44
Írta: Motoros Dátum 2007 június 07, 17:44
Páter!
Total gratula, ez tényleg nagyon megy, tied a baktertojás ( nem tudom mit jelent, de az apósom mindíg ezt mondta ha valami tetszett neki-Isten nyugosztalja)
A Tibor elismerése pedig tényleg garancia.
Sajnos ezzel a léc magasra lett téve, mostmár az én gépemmel csak akkor dicsekedhetek ha legalább így fog menni[#fejvakaras]
A mechanika is nagyon esztétikus--főleg a felületek megmunkálására gondolok. Teljesen profi..mehetsz a marós szakmunkásbizonyitványért.
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2007 június 07, 17:45
Írta: Motoros Dátum 2007 június 07, 17:45
Péter! bocs
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 07, 17:56
Írta: bmejdz9nu Dátum 2007 június 07, 17:56
Misi Mester viccelsz? Te írod ezt a HobbyTali Aranyérmes... :) (a többit most hagyjuk..smd:)
Te biztos vagy abban, hogy ez itt a max. amit ki lehet hozni léptetőkből? Akkor ne próbálkozzak tovább?:)
De majd ha más is felteszi a vidóját...
Csodálkozom más miért nem teszi... nekem ez olyan természetes, hogy megosztom amit "tudok"... azt a keveset...
Mert pl. esztegálni még nem... még ahhoz 2 és fél évet kell várnom... akkoriban te írtad 3 év múlva menni fog... most várok ...:)
Ha ez a léc magas(?) csapja le valaki! Annak örülnék a legjobban!
De ez még nem gép... csak egy "próbapad"...
A felületeknek csak a széle van kész.. Első próbálkozások, kisérletek a BF20-on...
a T-nutos asztalt (miután a csavarhelyeket feltöltöttem majd fémragasztóval) saját maga a gép fogja símítani...
Szerintem rengeteg szép dolog van csak nem publikálják... sajnos...
Te biztos vagy abban, hogy ez itt a max. amit ki lehet hozni léptetőkből? Akkor ne próbálkozzak tovább?:)
De majd ha más is felteszi a vidóját...
Csodálkozom más miért nem teszi... nekem ez olyan természetes, hogy megosztom amit "tudok"... azt a keveset...
Mert pl. esztegálni még nem... még ahhoz 2 és fél évet kell várnom... akkoriban te írtad 3 év múlva menni fog... most várok ...:)
Ha ez a léc magas(?) csapja le valaki! Annak örülnék a legjobban!
De ez még nem gép... csak egy "próbapad"...
A felületeknek csak a széle van kész.. Első próbálkozások, kisérletek a BF20-on...
a T-nutos asztalt (miután a csavarhelyeket feltöltöttem majd fémragasztóval) saját maga a gép fogja símítani...
Szerintem rengeteg szép dolog van csak nem publikálják... sajnos...
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2007 június 07, 18:04
Írta: Motoros Dátum 2007 június 07, 18:04
Na ne is bízd el magad mert ez azért csak egy mozgóasztalos gép lesz és tudod......[#gun][#boxer][#violent]
A publikáláshoz: Rengeteg idő valamit jól dokumentálni, fotózni stb --szinte külön szakma--és lehet hogy ez is az oka hogy kevesen szánják rá magukat. Meg hát az esetleges kritikát sem viseljük egyformán.
A publikáláshoz: Rengeteg idő valamit jól dokumentálni, fotózni stb --szinte külön szakma--és lehet hogy ez is az oka hogy kevesen szánják rá magukat. Meg hát az esetleges kritikát sem viseljük egyformán.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 07, 18:51
Írta: bmejdz9nu Dátum 2007 június 07, 18:51
Hát igen... Ha valami mozog az csak jobb lehet! (szerintem)
Mint írtam senkit sem akarok meggyőzni, páne téged [#hehe]
De ha pl. mindenki piros suzukival járna... elég unalmas lenne az élet!
De tessék majd az ellenkezőjét bizonyítani... videóval, adatokkal...
A kritikát én este 8 után már kimondottan kedvelem... akkor megnyitok egy üveg bort... ellenanyagnak [#nyes]
Mint írtam senkit sem akarok meggyőzni, páne téged [#hehe]
De ha pl. mindenki piros suzukival járna... elég unalmas lenne az élet!
De tessék majd az ellenkezőjét bizonyítani... videóval, adatokkal...
A kritikát én este 8 után már kimondottan kedvelem... akkor megnyitok egy üveg bort... ellenanyagnak [#nyes]
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 08, 05:57
Írta: 4mjnxdwuu Dátum 2007 június 08, 05:57
Hali. ha nem rakod dobozba, az asztalon kívüli munkatartományt én azért lefedném valamilyen módszerrel. Nálam már előfordult plexi vágása közben hogy a leesett darab beékelődött hosszában, (a gép élben próbálta összenyomni) ami anyagtól és motortól függően vagy megfogja a gépet, vagy jönnek a darabok... Nem túl szerencsés ilyet arcba kapni.
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 08, 06:03
Írta: 4mjnxdwuu Dátum 2007 június 08, 06:03
Üdv. megbeszélhetjük. (de még nincs teljesen kész)
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 08, 10:14
Írta: bmejdz9nu Dátum 2007 június 08, 10:14
Igazad van! Gondoltam rá...
Lesz asztal és fix egység között egy gumivédő-csúszó vagy "labirint" megoldás!
Lesz asztal és fix egység között egy gumivédő-csúszó vagy "labirint" megoldás!
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2007 június 08, 11:12
Írta: Kristály Árpád Dátum 2007 június 08, 11:12
Hallihó Péter!
Mint említettem a tesztedhez gratula, de azért látom, hogy neked is van takargatni valód.....
Hi....Hi....Hi......
Hallihó!
Mint említettem a tesztedhez gratula, de azért látom, hogy neked is van takargatni valód.....
Hi....Hi....Hi......
Hallihó!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 08, 15:15
Írta: bmejdz9nu Dátum 2007 június 08, 15:15
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 08, 15:16
Írta: bmejdz9nu Dátum 2007 június 08, 15:16
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 08, 15:57
Írta: 000000000 Dátum 2007 június 08, 15:57
Ezért nincsenek munkahelyek...[#violent][#violent][#violent][#violent]
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 08, 16:34
Írta: bmejdz9nu Dátum 2007 június 08, 16:34
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2007 június 08, 20:56
Írta: Kristály Árpád Dátum 2007 június 08, 20:56
Hallihó Péter!
Már azt hittem nem tudsz "meglepni"
Hallihó!
Már azt hittem nem tudsz "meglepni"
Hallihó!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 08, 22:12
Írta: bmejdz9nu Dátum 2007 június 08, 22:12
A meglepetésben vagyok a legjobb! Tudod...
Én magam is nagyon meg tudok lepődni! De annyira, hogy mindenki körülöttem ilyenkor meglepődik [#nyes]
Én magam is nagyon meg tudok lepődni! De annyira, hogy mindenki körülöttem ilyenkor meglepődik [#nyes]
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 10, 18:59
Írta: 4mjnxdwuu Dátum 2007 június 10, 18:59
Hali. beszáltam kicsit a tesztelgetásbe én is.
Ismét kiderült miért a K-cam-ot használom még mindíg.. (ha tudja valaki a megoldást írja már
meg !!! / mert a mach gyorsabb lenne)
A gép 10*ment 150mm-t (20 irányváltás)40 kg csempe szorosan lehúzatva (29 kg asztal, + valamennyi X tartó)
MACH2
19,8 m/perc 0,5mm hiba 1000 unit/sec2
12 m/perc 0,3mm hiba
6 m/perc 0,4mm hiba
2 m/perc 0,3mm hiba
2 m/perc 0,4mm hiba 700 unit/ sec2
0,2 m/perc 0,4mm hiba 700 unit/ sec2
0,2 m/perc 0,4mm hiba 10000unit/ sec2 (max)
/ezek a hibák kijönnek ha kb irányváltáskor 0,025-t azaz fél lépésben fél lépést hibázik, a mikrosteppem még nincs kész ezért egy Profi1-el próbáltam, a mérések nem egyszeri mérések/ MI LEHET A GOND A MACHNÁL????
K-cam
2 m/perc 0mm hiba 1m/p-ről indítva 1000 gyorsítás
2 m/perc 0mm hiba gyorsítás nélkül
4 m/perc 0mm hiba 1m/p-ről indítva 1000 gyorsítás
8 m/perc 0mm hiba
12 m/perc 0mm hiba
az indítást visszavettem 0,7m/p-re mert itt nem úgy indul mintha egy 10 kg-s kalapáccsal ütnék rá.
Fejre állítani nem tudom, mint Péter de esetleg ha lesz kis időm egy csigán ráakasztok súlyt. (de csak akkor ha a mikrosteppem kész lesz, mert a P1 hamar elveszti az erejét.
Annak azért örülök hogy Péter megosztotta velünk a méréseit, videókkal mert volt pár olyan ember itt a fórumon aki hülyének nézett, vagy válaszra sem méltatott, amikor annó elöször irtam az enyémről. ( Tibor45 nem rád gondolok)
Üdv.
Ismét kiderült miért a K-cam-ot használom még mindíg.. (ha tudja valaki a megoldást írja már
meg !!! / mert a mach gyorsabb lenne)
A gép 10*ment 150mm-t (20 irányváltás)40 kg csempe szorosan lehúzatva (29 kg asztal, + valamennyi X tartó)
MACH2
19,8 m/perc 0,5mm hiba 1000 unit/sec2
12 m/perc 0,3mm hiba
6 m/perc 0,4mm hiba
2 m/perc 0,3mm hiba
2 m/perc 0,4mm hiba 700 unit/ sec2
0,2 m/perc 0,4mm hiba 700 unit/ sec2
0,2 m/perc 0,4mm hiba 10000unit/ sec2 (max)
/ezek a hibák kijönnek ha kb irányváltáskor 0,025-t azaz fél lépésben fél lépést hibázik, a mikrosteppem még nincs kész ezért egy Profi1-el próbáltam, a mérések nem egyszeri mérések/ MI LEHET A GOND A MACHNÁL????
K-cam
2 m/perc 0mm hiba 1m/p-ről indítva 1000 gyorsítás
2 m/perc 0mm hiba gyorsítás nélkül
4 m/perc 0mm hiba 1m/p-ről indítva 1000 gyorsítás
8 m/perc 0mm hiba
12 m/perc 0mm hiba
az indítást visszavettem 0,7m/p-re mert itt nem úgy indul mintha egy 10 kg-s kalapáccsal ütnék rá.
Fejre állítani nem tudom, mint Péter de esetleg ha lesz kis időm egy csigán ráakasztok súlyt. (de csak akkor ha a mikrosteppem kész lesz, mert a P1 hamar elveszti az erejét.
Annak azért örülök hogy Péter megosztotta velünk a méréseit, videókkal mert volt pár olyan ember itt a fórumon aki hülyének nézett, vagy válaszra sem méltatott, amikor annó elöször irtam az enyémről. ( Tibor45 nem rád gondolok)
Üdv.
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 10, 19:01
Írta: 4mjnxdwuu Dátum 2007 június 10, 19:01
A MACH fontos lenne mert pl egy képnél teljesen eltolja a sorokat, (tudom tegyem ferdén alá a munkadarabot [#taps][#csodalk]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 10, 19:10
Írta: 000000000 Dátum 2007 június 10, 19:10
A P1-ed frissítve lett (a legutolsó Firmware-ra és PCB átalakításra)?
A PreChange az előírt értéken áll? Mach3 legújabb változatát használod?
A PreChange az előírt értéken áll? Mach3 legújabb változatát használod?
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 10, 19:11
Írta: bmejdz9nu Dátum 2007 június 10, 19:11
Videó beszél - kutya ugat... :) Hisszük ha látjuk :):):)
Nincs valami rögzitő-komunikációs eszközöd?
Lehet, hogy az én felfogásom gyenge vagy Mach-ul van írva... de nem értem az adatokat...?
Mi aza hiba?
700msec a gyorsítás? jól írtdad? A winPC-NC-nél ez a max. megadható adat...
12méter/perc a sebbesség? Ez megdöbbentő jó érték... látni kellene!
Nincs valami rögzitő-komunikációs eszközöd?
Lehet, hogy az én felfogásom gyenge vagy Mach-ul van írva... de nem értem az adatokat...?
Mi aza hiba?
700msec a gyorsítás? jól írtdad? A winPC-NC-nél ez a max. megadható adat...
12méter/perc a sebbesség? Ez megdöbbentő jó érték... látni kellene!
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 10, 19:38
Írta: 4mjnxdwuu Dátum 2007 június 10, 19:38
A P1- vettem egy fórumtárstól, kittből építette
nem a legutolsó, a pic talán 503 vagy ilyesmi.. a nyák 4 valamennyi A k-cam-nál semmi probléma... Mach 2-t probáltam, mert a 3-nak sem a felülete sem a jog modja nem tetszik, de a 3 is ugyanezt produkálta.
nem a legutolsó, a pic talán 503 vagy ilyesmi.. a nyák 4 valamennyi A k-cam-nál semmi probléma... Mach 2-t probáltam, mert a 3-nak sem a felülete sem a jog modja nem tetszik, de a 3 is ugyanezt produkálta.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 10, 19:43
Írta: 000000000 Dátum 2007 június 10, 19:43
Azt update-elni kell! Utána jó lesz!
A Mach3 (és 2 is) igen szűk Dir előbeállási időt használ...
Csináld meg a weblapon található PCB átalakítást és küld el a PIC-et (frissítem ingyen, csak a postát kell álnod, használj megcímzett válaszborítékot)!
A Mach3 (és 2 is) igen szűk Dir előbeállási időt használ...
Csináld meg a weblapon található PCB átalakítást és küld el a PIC-et (frissítem ingyen, csak a postát kell álnod, használj megcímzett válaszborítékot)!
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 10, 19:45
Írta: 4mjnxdwuu Dátum 2007 június 10, 19:45
A hiba a visszatérés mikrométerrel mért értéke a 10 oda-vissza út után. "700msec a gyorsítás?" nem 700 unit/ sec2, gondolom 700mm/sec*sec Itt a max érték 10000 unit/sec*sec
Csak telefonom van, az azért nem éppen kamera.
Csak telefonom van, az azért nem éppen kamera.
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 10, 19:50
Írta: 4mjnxdwuu Dátum 2007 június 10, 19:50
5.0.3 van ráírva, most néztem a kondik benne vannak, mindjárt kiszedem...
Köszike.
Köszike.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 10, 19:51
Írta: 000000000 Dátum 2007 június 10, 19:51
Sajnos önmagában még nem elégséges (kell az update is)!
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 10, 20:00
Írta: 4mjnxdwuu Dátum 2007 június 10, 20:00
"A Firmwaret frissíteni kell V5.0.2*-esre (vagy magasabbra)" ez van bal oldalt írva, erre alkesz filcel van ráírva 5.0.3 akkor ez mégsem jó???
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 10, 20:22
Írta: bmejdz9nu Dátum 2007 június 10, 20:22
Most P1 vagy H1 ről van szó?
Milyenek a motorok? Áram és a többi... milyen a golyósorsó? milyen a vezető?
Milyenek a motorok? Áram és a többi... milyen a golyósorsó? milyen a vezető?
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 10, 21:03
Írta: 4mjnxdwuu Dátum 2007 június 10, 21:03
Hali. kivettem a kondikat és jó lett.
Péternek: "régi" P1 alias Profi1.
István! akartam feltenni videót a file tárba, majdnem 6 Mega, elment de nem találom, esetleg van valami méret limit????
Péternek: "régi" P1 alias Profi1.
István! akartam feltenni videót a file tárba, majdnem 6 Mega, elment de nem találom, esetleg van valami méret limit????
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 10, 21:15
Írta: bmejdz9nu Dátum 2007 június 10, 21:15
"CncTar.HunBay.com 10G tárhely" topikban a leírás.. itt a fórumon... főkönyvtár...no limit...!
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 10, 21:16
Írta: 4mjnxdwuu Dátum 2007 június 10, 21:16
közben új rekord 27m/perc igaz semmi erő...
Hogy tudom feltenni???
Hogy tudom feltenni???
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 10, 21:17
Írta: bmejdz9nu Dátum 2007 június 10, 21:17
Disk space available 4730.73 Megabytes !!!
Most néztem... ne sajnáld...
Most néztem... ne sajnáld...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 10, 21:19
Írta: bmejdz9nu Dátum 2007 június 10, 21:19
P1 motorvezérlő eladó a legnagyobbat kínálónak!
igaz hogy csak 2 csatornás de 3 szervóvezérlőért már odaadom! [#hawaii]
Eredeti MI forrasztásokkal semmi buhera!
igaz hogy csak 2 csatornás de 3 szervóvezérlőért már odaadom! [#hawaii]
Eredeti MI forrasztásokkal semmi buhera!
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 10, 21:57
Írta: 4mjnxdwuu Dátum 2007 június 10, 21:57
A videó nem profi egy telefonnal lett készítve.
250mm-t mozog oda-vissza 10 szer 40 kg csempével a legnehezebb irányban (ebbe az irányba cipeli a legtöbbe súlyt)
Mach beállítások
sebesség:300 mm/sec
gyorsítás:800 mm/sec2
Jó lenne ha valaki átalakítaná az alap 1024-es .set-et hogy 1-el több számot tudjon megjeleníteni a sebességnél.
18m/perc
250mm-t mozog oda-vissza 10 szer 40 kg csempével a legnehezebb irányban (ebbe az irányba cipeli a legtöbbe súlyt)
Mach beállítások
sebesség:300 mm/sec
gyorsítás:800 mm/sec2
Jó lenne ha valaki átalakítaná az alap 1024-es .set-et hogy 1-el több számot tudjon megjeleníteni a sebességnél.
18m/perc
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 11, 00:46
Írta: 000000000 Dátum 2007 június 11, 00:46
Mi ez az iszonyatos visítás a videón??
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 11, 05:46
Írta: 4mjnxdwuu Dátum 2007 június 11, 05:46
Profi1 hangja[#buck]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 11, 07:25
Írta: 000000000 Dátum 2007 június 11, 07:25
Akkor ez így van (már régen olvastam el a gyártó support lapját...[#vigyor4])!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 11, 07:35
Írta: bmejdz9nu Dátum 2007 június 11, 07:35
Na azért lett videó! Még - még!!!
Egy gyakorlatias azaz egy rövidebb uatas pl. 5mm-10mm-20mm-es tesztet?
De még mindíg nem értem az adatokat. (Bekapcsoltam a Mach-ot... hátha... persze nem értek hozzá még azt sem találtam benne, hol kell beállítani a tengely adatokat ... na de ez egy másik téma...)
Én mindíg mm/s-ben számolok mert a WinPC-NC nek ez az alapegysége....
1.Tehát 300mm/s a sebesség...?
2.A videón (igaz homályosan) látni, hogy a gyorsítás 300 unit/sec-ra van állítva... mennyi egy "unit"? 1unit=1sec?
Csak azért kérdezem, mert a gyorsulás befolyásolhatja az egész tesztet...
Jól megy...
Többet nem akarsz elárulni a gépről?
Orsók emelkedése, motor adatai, tápfesz...
Csak az tudjuk, hogy Profi 1-el megy...
Egy gyakorlatias azaz egy rövidebb uatas pl. 5mm-10mm-20mm-es tesztet?
De még mindíg nem értem az adatokat. (Bekapcsoltam a Mach-ot... hátha... persze nem értek hozzá még azt sem találtam benne, hol kell beállítani a tengely adatokat ... na de ez egy másik téma...)
Én mindíg mm/s-ben számolok mert a WinPC-NC nek ez az alapegysége....
1.Tehát 300mm/s a sebesség...?
2.A videón (igaz homályosan) látni, hogy a gyorsítás 300 unit/sec-ra van állítva... mennyi egy "unit"? 1unit=1sec?
Csak azért kérdezem, mert a gyorsulás befolyásolhatja az egész tesztet...
Jól megy...
Többet nem akarsz elárulni a gépről?
Orsók emelkedése, motor adatai, tápfesz...
Csak az tudjuk, hogy Profi 1-el megy...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 11, 07:54
Írta: bmejdz9nu Dátum 2007 június 11, 07:54
Ha mm az unit akkor a 300mm/sec sebességet 300mm alatt éri el?
A lassítást is lehet állítani a Mach-on? Külön-külön? vagy mit jelennt az a csúcsos görbe? Hogy kell értelmezni?
"Motors setup velocity/acceleration" a kifejezést értem gyorsítás/lassítás... de a görbe meghatározását nem... Ilyen szép grafikon nincs a WinPc-NC-ben... csak egy számot lehet bele adni 0-tól 700mSec-ig....
A lassítást is lehet állítani a Mach-on? Külön-külön? vagy mit jelennt az a csúcsos görbe? Hogy kell értelmezni?
"Motors setup velocity/acceleration" a kifejezést értem gyorsítás/lassítás... de a görbe meghatározását nem... Ilyen szép grafikon nincs a WinPc-NC-ben... csak egy számot lehet bele adni 0-tól 700mSec-ig....
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 11, 08:20
Írta: 4mjnxdwuu Dátum 2007 június 11, 08:20
sebesség:300 mm/sec
gyorsítás:800 mm/sec2
gyorsítás:800 mm/sec2
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 11, 08:21
Írta: 4mjnxdwuu Dátum 2007 június 11, 08:21
Ha 1000mm/sec2-re teszem a gyorsitást akkor a fél lépés miatt úgy indul mintha "kalapáccsal indítanám" magamat idézve...
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 11, 08:30
Írta: 4mjnxdwuu Dátum 2007 június 11, 08:30
Hozzád tettem fel képeket is...
x-y
orsó THK 16*10 két bekezdés
Vezeték THK Srist 15, 4 golyósorral
z IKO 20-as lin tengely lin csapágyakkal 16*2-es trapézzal.
x-y Motorok NEMA34 (hosszabb kivitel) 2,6V 3,5-4,5A. talán valami KPxxxx vagy hasonló, majd otthon megnézem.
z motor NEMA34 (rövidebb) valami 6V környéke kis áram... Gyenge, és a fordulatot sem bírja max 500mm/sec de biztonsági okokból 350mm/sec-en használom. 27m/percnél a 250mm-t végig gyorsította, és lassította....
x-y
orsó THK 16*10 két bekezdés
Vezeték THK Srist 15, 4 golyósorral
z IKO 20-as lin tengely lin csapágyakkal 16*2-es trapézzal.
x-y Motorok NEMA34 (hosszabb kivitel) 2,6V 3,5-4,5A. talán valami KPxxxx vagy hasonló, majd otthon megnézem.
z motor NEMA34 (rövidebb) valami 6V környéke kis áram... Gyenge, és a fordulatot sem bírja max 500mm/sec de biztonsági okokból 350mm/sec-en használom. 27m/percnél a 250mm-t végig gyorsította, és lassította....
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 11, 08:36
Írta: bmejdz9nu Dátum 2007 június 11, 08:36
Na akkor már csak egy fizikus kelene... csak akad... :)
(nem akarok beírni a béna vagyok c. topikba... valamikor tanultam persze... de rég volt... :)
Valaki megírhatná, hogyan kell értelmezni a 800mm/sec2-et? Mi a képlet? Mennyi idő alatt gyorsul akkor 300mm/sec-re ekkor ???
(nem akarok beírni a béna vagyok c. topikba... valamikor tanultam persze... de rég volt... :)
Valaki megírhatná, hogyan kell értelmezni a 800mm/sec2-et? Mi a képlet? Mennyi idő alatt gyorsul akkor 300mm/sec-re ekkor ???
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 11, 08:56
Írta: 000000000 Dátum 2007 június 11, 08:56
Érdeklődve olvasom a mozgó asztal vs. mozgó maró tanakodásokat...
Én a mikroszkópos kisérlet alapján a mozgó asztal ellen vagyok, kicsi nagyon a hasznos munkaterület...
Viszont nagyon nagy a maró merevsége (a "gagyi" dremel a mikroszkópon mint az állat ül és mar). Meglepően sokat számít, hiába a forgácsoló élnek kéne dolgozni...
Amin gondolkozom, de mivel mindjárt nyaralok,és arra készülődök, majd ti kitaláljátok, mi a jó...
Szal a felső dauk járnak a fejemben... tudniillik akkor egy felső kereten futhat a marómotor, amit szerintem lényegesen merevebbre meg lehet építeni, mint a mostani alsó szános konstrukciókat és tele asztalod van...
Én a mikroszkópos kisérlet alapján a mozgó asztal ellen vagyok, kicsi nagyon a hasznos munkaterület...
Viszont nagyon nagy a maró merevsége (a "gagyi" dremel a mikroszkópon mint az állat ül és mar). Meglepően sokat számít, hiába a forgácsoló élnek kéne dolgozni...
Amin gondolkozom, de mivel mindjárt nyaralok,és arra készülődök, majd ti kitaláljátok, mi a jó...
Szal a felső dauk járnak a fejemben... tudniillik akkor egy felső kereten futhat a marómotor, amit szerintem lényegesen merevebbre meg lehet építeni, mint a mostani alsó szános konstrukciókat és tele asztalod van...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 11, 08:57
Írta: 000000000 Dátum 2007 június 11, 08:57
dauk = daruk
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 11, 09:21
Írta: 000000000 Dátum 2007 június 11, 09:21
Gyorsan feltöltöttem egy kis rajzot a cnctárba, stgellert mappába:
felső daru
Nem rajzoltam alá a marómotort, de szvsz érthető.
felső daru
Nem rajzoltam alá a marómotort, de szvsz érthető.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 11, 09:30
Írta: bmejdz9nu Dátum 2007 június 11, 09:30
Válasz a mechanikai ötletekben... mert ez már az... :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 11, 10:14
Írta: 000000000 Dátum 2007 június 11, 10:14
Szia Péter! Légyszi konvertáld át Trapista
videóját vmf-re, úgy mint MasterGy-nál tetted,
mert valami miatt nekem nem nyitja meg ebben a
formátumban. Előre is köszi!
videóját vmf-re, úgy mint MasterGy-nál tetted,
mert valami miatt nekem nem nyitja meg ebben a
formátumban. Előre is köszi!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 11, 10:27
Írta: 000000000 Dátum 2007 június 11, 10:27
Szia Tibor!
Nem néznél be egy szóra a topicomba?
Áron [#lama]
Nem néznél be egy szóra a topicomba?
Áron [#lama]
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 11, 10:50
Írta: bmejdz9nu Dátum 2007 június 11, 10:50
Ok. de csak egykor lesz fent... nem vagyok otthon...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 11, 10:53
Írta: bmejdz9nu Dátum 2007 június 11, 10:53
Ja.. egyébként QuickTime mp4 formátum... Quicktime (Apple) lejátszó kell hozzá...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 11, 12:24
Írta: bmejdz9nu Dátum 2007 június 11, 12:24
TraPista__SV_A011.wmv
De most már valaki számolja ki az értékeket számomra is ehető módra...
Ma már 10embert kérdeztem a mm/s2 gyorsulásról és senki sem tudott semmit?
De azért örülök, hogy ezzel nem vagyok egyedül...
Ez a Mach azért elég fejtörős progi lehet!
Mindenben?
Ha ilyen gyorsulási adatokkal "tömi" az amatörök fejét...??? Minek?
Míg a winPC-nék rém egyszerű pl. xyms alatt xxymm/s-ra... Egy autónál is így adják meg, hogy pl. 6s alatt van 100Km-en... (Ferrari)
De most már valaki számolja ki az értékeket számomra is ehető módra...
Ma már 10embert kérdeztem a mm/s2 gyorsulásról és senki sem tudott semmit?
De azért örülök, hogy ezzel nem vagyok egyedül...
Ez a Mach azért elég fejtörős progi lehet!
Mindenben?
Ha ilyen gyorsulási adatokkal "tömi" az amatörök fejét...??? Minek?
Míg a winPC-nék rém egyszerű pl. xyms alatt xxymm/s-ra... Egy autónál is így adják meg, hogy pl. 6s alatt van 100Km-en... (Ferrari)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 11, 12:34
Írta: 000000000 Dátum 2007 június 11, 12:34
Nem igazán értem mit nem értesz ebből?! A gyorsulás időegység alatti sebesség változás, tehát m/s (sebesség) /s = m/s2. Tehát másodpercenként ekkora sebességgel változik a sebessége az-az gyorsul v. lassul (nem tudom érthető e)?!
Más szavakkal ha a kezdeti sebességed 1m/s-volt és ez 1s alatt 2m/s-ra emelkedett, akkor a gyorsulásod 1m/s2 volt.
A Mach mind a gyorsuláshoz, mind a lassuláshoz azonos sebesség változást használ.
Más szavakkal ha a kezdeti sebességed 1m/s-volt és ez 1s alatt 2m/s-ra emelkedett, akkor a gyorsulásod 1m/s2 volt.
A Mach mind a gyorsuláshoz, mind a lassuláshoz azonos sebesség változást használ.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 11, 12:36
Írta: 000000000 Dátum 2007 június 11, 12:36
Péter! Köszönöm a konvertálást!
a=dv/dt
ahol a: gyorsulás
dv/dt : időegységre eső sebességváltozás
s=0.5*a*t*t
ahol s: megtett út
t: idő
Ezekkel a képletekkel tudsz számolni Trapista
adataival.
a=dv/dt
ahol a: gyorsulás
dv/dt : időegységre eső sebességváltozás
s=0.5*a*t*t
ahol s: megtett út
t: idő
Ezekkel a képletekkel tudsz számolni Trapista
adataival.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 11, 12:48
Írta: 000000000 Dátum 2007 június 11, 12:48
Szia Trapista!
Néhány észrevételem lenne a videód kapcsán.
- Túl hosszúak a lassítási gyorsítási szakaszok,
így a "nagy sebesség" nem sokat ér.
Állítsd sokkal meredekebbre a Mach motor
gyorsulás diagramját.
- Légyszi állandó erő terheléssel
nézd meg a gépedet (Úgy mint Péter tette
függőleges súlyterheléssel javaslatomra),
az lesz az igazi teszt.
Néhány észrevételem lenne a videód kapcsán.
- Túl hosszúak a lassítási gyorsítási szakaszok,
így a "nagy sebesség" nem sokat ér.
Állítsd sokkal meredekebbre a Mach motor
gyorsulás diagramját.
- Légyszi állandó erő terheléssel
nézd meg a gépedet (Úgy mint Péter tette
függőleges súlyterheléssel javaslatomra),
az lesz az igazi teszt.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 11, 13:04
Írta: bmejdz9nu Dátum 2007 június 11, 13:04
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 11, 13:10
Írta: bmejdz9nu Dátum 2007 június 11, 13:10
#1214:
sebesség:300 mm/sec
gyorsítás:800 mm/sec2
Lehet hü..nek nézni... de nem értem...
Akkor itt sosem gyorsul fel a maxra? [#fejvakaras] [#falbav]
sebesség:300 mm/sec
gyorsítás:800 mm/sec2
Lehet hü..nek nézni... de nem értem...
Akkor itt sosem gyorsul fel a maxra? [#fejvakaras] [#falbav]
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 11, 13:12
Írta: bmejdz9nu Dátum 2007 június 11, 13:12
számoljátok ki 0-ról nekem... Mert arról indúl... az egyértelnű...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 11, 13:13
Írta: 000000000 Dátum 2007 június 11, 13:13
Szerintem tervezőgrafikus vagy[#vigyor2]
Mármint a matek miatt:-) Én inkább úgy értem, hogy 300 mm/sec a stabil sebesség, de ezt a 300 mm/sec-t egy 800 mm/sec-es stabilra felgyorsító "lökés" előzi meg... kérdés persze, hogy ez a lökés egy mekkora útszakaszra vonatkozik, illetve a stabil mekkorára...
(ha nincs igazam, nem kell aggódni, én tervezőgrafikus vagyok szintén:-)))) )
Mármint a matek miatt:-) Én inkább úgy értem, hogy 300 mm/sec a stabil sebesség, de ezt a 300 mm/sec-t egy 800 mm/sec-es stabilra felgyorsító "lökés" előzi meg... kérdés persze, hogy ez a lökés egy mekkora útszakaszra vonatkozik, illetve a stabil mekkorára...
(ha nincs igazam, nem kell aggódni, én tervezőgrafikus vagyok szintén:-)))) )
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 11, 13:22
Írta: bmejdz9nu Dátum 2007 június 11, 13:22
Hát igen... akkor már ketten vagyunk "égőben"...
Szerintem nem pluszba jön a távhoz... hanem lejön belőle...
Az írta 250mm volt a mozgatott terület...
Szerintem nem pluszba jön a távhoz... hanem lejön belőle...
Az írta 250mm volt a mozgatott terület...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 11, 13:25
Írta: 000000000 Dátum 2007 június 11, 13:25
A megadott adatokkal 375ms alatt gyorsul fel
300 mm/s-re. Közben 56.2 mm utat tesz meg.
Ha a teljes elmozdulás 250 mm, akkor
marad 250-2*56.2=137.6 mm állandó sebssségű
(300 mm/s) szakasz.
300 mm/s-re. Közben 56.2 mm utat tesz meg.
Ha a teljes elmozdulás 250 mm, akkor
marad 250-2*56.2=137.6 mm állandó sebssségű
(300 mm/s) szakasz.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 11, 13:26
Írta: 000000000 Dátum 2007 június 11, 13:26
Ha a végsebességed 300 mm/s és gyorsításod 800mm/s2, akkor a végsebességet 0.375s alatt éred el. Ha az úthosszad nincs 2× hosszabb, mint ameddig a gép 0.375s-on keresztül menni képes, akkor valóban nem gyorsul fel a max-ig.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 11, 13:28
Írta: 000000000 Dátum 2007 június 11, 13:28
Ez így van![#eljen]
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 11, 13:30
Írta: bmejdz9nu Dátum 2007 június 11, 13:30
Ó ... Köszönöm mindenkinek a számításokat!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 11, 13:37
Írta: bmejdz9nu Dátum 2007 június 11, 13:37
De kis szakaszokon (ami a legtöbbször van egy valós maráskor) sosem fogja elérni az "üzemi" sebességet... tehát kb. 50mm-en belül csak gyorsít... ill lassít... mert ez a gép sem egy 2x1 méteres...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 11, 13:58
Írta: bmejdz9nu Dátum 2007 június 11, 13:58
Megmértem a videót... :) :) :)
16mp alatt 10 löket... végtől végig... mire jó egy videószerkesztő progi....
Tehát 1,6 mp = 250mm
Remélem Trapista szívesen veszi a "vesézést"?
Előkerül és megesz...
16mp alatt 10 löket... végtől végig... mire jó egy videószerkesztő progi....
Tehát 1,6 mp = 250mm
Remélem Trapista szívesen veszi a "vesézést"?
Előkerül és megesz...
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 11, 14:12
Írta: 4mjnxdwuu Dátum 2007 június 11, 14:12
Nyugodtan, hátha el.sztam valamit azt már az elején is mondtam hogy sokáig gyorsít pl 30m/percet nem érte el, mert folyamatosan gyorsított-lassított, a max 27 volt. ha lesz kis időm kötök rá nehezéket csigán ha az megfelel. (400 kg, nem szivesen borítom fejre) a gyorsítást visszább vettem mert mint mondtam ettől nagyobb gyorsítási értéken nagyot durran szó szerint (tuti a fél lépés miatt) (engem ez csak annyiban érdekelt, ha 40 kg-t tud igy reptetni, nekem megfelel ha állandóra beállítok 8-10 métert, és azzal nem lesz gond...
Erőt nem várnék tőle, a hosszú gyorsítás miatt megy egyátalán, pláne Profi 1-el.
Erőt nem várnék tőle, a hosszú gyorsítás miatt megy egyátalán, pláne Profi 1-el.
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 11, 14:17
Írta: 4mjnxdwuu Dátum 2007 június 11, 14:17
Látom van időd...[#taps][#nevetes1][#integet2]
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 11, 14:41
Írta: bmejdz9nu Dátum 2007 június 11, 14:41
És gyorsítást lehet neki adni még?... akár persze a végsebesség rovására.
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 11, 16:07
Írta: 4mjnxdwuu Dátum 2007 június 11, 16:07
2 m/percel indítottam már gyorsítás nélkül, de marha nagyot szólt.... Szerintem nem esészséges a mechanikának.
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 11, 16:12
Írta: 4mjnxdwuu Dátum 2007 június 11, 16:12
De ezzeknek a nagy sebességeknek 10m/p felett, számomra semmi értelme. csak arra szerettem volna rávilágítani, hogy pl: egy faipari gépnél ahol minden könnyűszerkezetes, és pár kiló a cipelt teher, mondjuk egy felsőmaró, nyugottan lehet használni x*10-es vagy x*15-s orsókat. (mintha úgy vettem volna észre, hogy félnek az emberek tőle...
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 11, 16:25
Írta: 4mjnxdwuu Dátum 2007 június 11, 16:25
Üdv.
Valami más alternatíva, ami hasonló eredményt adna, nem szívesen szedném szét...???
a #1244-ben is csak gyorsjáratra értem.
Valami más alternatíva, ami hasonló eredményt adna, nem szívesen szedném szét...???
a #1244-ben is csak gyorsjáratra értem.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 11, 16:43
Írta: bmejdz9nu Dátum 2007 június 11, 16:43
Szerintem sem kell félni a pl. 10mm-es golyósorsótol... (főleg ha pontos és ha van lehetőség microsteppre...)
De a gyorsítást nagyon fontosnak tartom, főleg egy kis munkaterületű gépnél... mert ide oda fog kapkodni, cikázni pl. 3D marás, nyákmarás, fúrás! :)
Mit jelent az hogy gyorsítás nélkül?
0msec az ugyebár fizikai lehetlenség ... csak kicsi érték pl. 80mS... de az is már olyan mint a kalapács...
De a tied is mozgóasztalos... ezek jobban bírják a gyorsítást... mert kevesebb mechanikai függőség van... ha jól gondolom...
Mechanikának mi tesz jót... :)
Vagyis ahogy én teszteltem az enyémet:
100mm/s-s sebességgel nekimenni a végének!!!
Golyósorsó anya neki a csapágyháznak! Brutál!
Én úgy terveztem, hogy ezt ki kell bírnia! Mert ez az esemény bármikor bekövetkezhet spontán is!
Teszetelve... bírja.... ez ám a kemény buli...
Na jó persze... egy kicsit csaltam... minden végre a csapágytatóra tettem egy vastag (5mm) gumilap darabkát... de mechainkai elállítódást nem tudtam mérni - tehát jó az ütközés teszt!
De a gyorsítást nagyon fontosnak tartom, főleg egy kis munkaterületű gépnél... mert ide oda fog kapkodni, cikázni pl. 3D marás, nyákmarás, fúrás! :)
Mit jelent az hogy gyorsítás nélkül?
0msec az ugyebár fizikai lehetlenség ... csak kicsi érték pl. 80mS... de az is már olyan mint a kalapács...
De a tied is mozgóasztalos... ezek jobban bírják a gyorsítást... mert kevesebb mechanikai függőség van... ha jól gondolom...
Mechanikának mi tesz jót... :)
Vagyis ahogy én teszteltem az enyémet:
100mm/s-s sebességgel nekimenni a végének!!!
Golyósorsó anya neki a csapágyháznak! Brutál!
Én úgy terveztem, hogy ezt ki kell bírnia! Mert ez az esemény bármikor bekövetkezhet spontán is!
Teszetelve... bírja.... ez ám a kemény buli...
Na jó persze... egy kicsit csaltam... minden végre a csapágytatóra tettem egy vastag (5mm) gumilap darabkát... de mechainkai elállítódást nem tudtam mérni - tehát jó az ütközés teszt!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 11, 16:50
Írta: bmejdz9nu Dátum 2007 június 11, 16:50
Arra lennék kiváncsi a szervókkal mekkora gyorsítást tudtak elérni az Urak...
Ott ugyanis ha jól gondolom be lehet állítani a Mach-ot 0.0-ra...de a valóságos gyorsítást csak a motor és az "általa hajtott" encoder jelei adják...
Hogy is lehet mérni ezt ekkor?
Ha lennne válasz erre .... a szervó topikba...
Ott ugyanis ha jól gondolom be lehet állítani a Mach-ot 0.0-ra...de a valóságos gyorsítást csak a motor és az "általa hajtott" encoder jelei adják...
Hogy is lehet mérni ezt ekkor?
Ha lennne válasz erre .... a szervó topikba...
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 11, 17:15
Írta: 4mjnxdwuu Dátum 2007 június 11, 17:15
A "0" gyorsitást próbáld a K-cam-ban ott vagy kikapcsolod a gyorsírást, szó szerint a megadott értékkel pofánvágja a mocit, vagy bekapcsolod, és megadhatod a kezdő sebességet amivel megrúgja, majd a beállított gyorsítással felgyorsítja a beállított sebességre.
A mach-nál nincs ilyen, ott most próbáltam
5000 mm/sec2 55mm/sec
7000 mm/sec2 33mm/sec
11000mm/sec2 28mm/sec
amit tud. de a további kisérleteket elhalasztanám a mikrosteppig, szerintem nem mindegy, mivel hajtom...
A mociról ha valaki tudna valamit: KP8AM2-009 JAPAN SERVO CO. LTD / egyébként üresen próbáltam annó egy fele ekkora Nema34-el az valami francia volt./úgy az is ezt hozta kb...
Többször túlszaladt már nekem is 15-18m/p-vel a csapágyház fogta meg (a mach miatt, elfelejtettem, hogy addig lassít ameddig gyorsított. /a K-cam jog módban gyorsít, de vészstoppal ál meg, (ez sem mindíg előnyös)
A mach-nál nincs ilyen, ott most próbáltam
5000 mm/sec2 55mm/sec
7000 mm/sec2 33mm/sec
11000mm/sec2 28mm/sec
amit tud. de a további kisérleteket elhalasztanám a mikrosteppig, szerintem nem mindegy, mivel hajtom...
A mociról ha valaki tudna valamit: KP8AM2-009 JAPAN SERVO CO. LTD / egyébként üresen próbáltam annó egy fele ekkora Nema34-el az valami francia volt./úgy az is ezt hozta kb...
Többször túlszaladt már nekem is 15-18m/p-vel a csapágyház fogta meg (a mach miatt, elfelejtettem, hogy addig lassít ameddig gyorsított. /a K-cam jog módban gyorsít, de vészstoppal ál meg, (ez sem mindíg előnyös)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 11, 19:17
Írta: 000000000 Dátum 2007 június 11, 19:17
A 0 gyorsítás az nem gyorsítás...[#nevetes1]
A Mach-t csutkára fel tolva nem 0 lesz a gyorsítása!
A Mach-t csutkára fel tolva nem 0 lesz a gyorsítása!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 11, 19:24
Írta: bmejdz9nu Dátum 2007 június 11, 19:24
Minimális azaz 0.00000000000000000000000001ms2-ra gondolok...
... persze olyan nincs...Mennyi a min. (a max) a Machban?
A puskagolyó is gyorsul... nem bumm és ott van..
Talán a fény is?
... persze olyan nincs...Mennyi a min. (a max) a Machban?
A puskagolyó is gyorsul... nem bumm és ott van..
Talán a fény is?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 11, 19:28
Írta: 000000000 Dátum 2007 június 11, 19:28
A gyorsítási idő az igen, de a gyorsulás az nem! A gyorsulás mértékegysége a m/s2 és a Mach ezt használja (nem a gyorsítási időt)! Tehát mach-ban nem 0 a max gyorsítás!
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 11, 20:24
Írta: 4mjnxdwuu Dátum 2007 június 11, 20:24
Mach2-ben 11xxx.mm/sec2
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 12, 05:48
Írta: 4mjnxdwuu Dátum 2007 június 12, 05:48
Bocsi a "0" gyorsítást úgy értettem hogy szoftveresen nincs beállítva gyorsítás, fullon indul.(k-camnál lehetséges)
Péternek: ha áll a géped, és egyszer csak jön 1 db step impulzus akkor azt hogy gyorsítod???(szoftveresen)
Péternek: ha áll a géped, és egyszer csak jön 1 db step impulzus akkor azt hogy gyorsítod???(szoftveresen)
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 12, 07:19
Írta: bmejdz9nu Dátum 2007 június 12, 07:19
Na jó megfogtál!
Ez első lépés a legnehezzebb :)
De a fullon indítás pl. ráengedsz 25KHz-et a motorra... gondolom az a biztos lépésvesztés...
Ez első lépés a legnehezzebb :)
De a fullon indítás pl. ráengedsz 25KHz-et a motorra... gondolom az a biztos lépésvesztés...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 12, 19:47
Írta: 000000000 Dátum 2007 június 12, 19:47
Sziasztok!
Engem meglep, hogy a gyorsulást egyetlen adattal jellemzitek!!!
(m/s2 vagy mm/s2, ez most mindegy.) Hiszen minden sebességhez más és más gyorsulás kellene, hogy tartozzon, szép púpos grafikonnal, aminek kísértetiesen hasonlítania kellene a motorotok nyomatékgörbéjének a formájára!!! Ez volna a kívánatos, hogy a motor kellő hatásfokkal dolgozzon. Csak egyszerűsítettetek, vagy netán a Mach nem tud ilyet???
Várom a válaszokat!
Áron
Engem meglep, hogy a gyorsulást egyetlen adattal jellemzitek!!!
(m/s2 vagy mm/s2, ez most mindegy.) Hiszen minden sebességhez más és más gyorsulás kellene, hogy tartozzon, szép púpos grafikonnal, aminek kísértetiesen hasonlítania kellene a motorotok nyomatékgörbéjének a formájára!!! Ez volna a kívánatos, hogy a motor kellő hatásfokkal dolgozzon. Csak egyszerűsítettetek, vagy netán a Mach nem tud ilyet???
Várom a válaszokat!
Áron
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 12, 19:48
Írta: 000000000 Dátum 2007 június 12, 19:48
Sziasztok!
Engem meglep, hogy a gyorsulást egyetlen adattal jellemzitek!!!
(m/s2 vagy mm/s2, ez most mindegy.) Hiszen minden sebességhez más és más gyorsulás kellene, hogy tartozzon, szép púpos grafikonnal, aminek kísértetiesen hasonlítania kellene a motorotok nyomatékgörbéjének a formájára!!! Ez volna a kívánatos, hogy a motor kellő hatásfokkal dolgozzon. Csak egyszerűsítettetek, vagy netán a Mach nem tud ilyet???
Várom a válaszokat!
Áron
Engem meglep, hogy a gyorsulást egyetlen adattal jellemzitek!!!
(m/s2 vagy mm/s2, ez most mindegy.) Hiszen minden sebességhez más és más gyorsulás kellene, hogy tartozzon, szép púpos grafikonnal, aminek kísértetiesen hasonlítania kellene a motorotok nyomatékgörbéjének a formájára!!! Ez volna a kívánatos, hogy a motor kellő hatásfokkal dolgozzon. Csak egyszerűsítettetek, vagy netán a Mach nem tud ilyet???
Várom a válaszokat!
Áron
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 12, 20:41
Írta: bmejdz9nu Dátum 2007 június 12, 20:41
A gyorsítást én fontosnak tartom... persze ilyenkor a max. sebességre...
Mert - gondolt végig - a CNC gép nem felület csiszológép... :)
A gyakorlatban sok-sok kis mozdulatből áll össze a folyamat...
Ez - a gyursulás - határozza meg leginkább egy munkafolyamat idejét...
Nem kell mindjárt egy 3D marásra gondolni... elég egy nyák furására...
Hogy látjátok ezt? Rosszul látom? Kétszeres sebességű gépet is megesz egy kétszeres gyorsítással bíró... szerintem... :)
Mert - gondolt végig - a CNC gép nem felület csiszológép... :)
A gyakorlatban sok-sok kis mozdulatből áll össze a folyamat...
Ez - a gyursulás - határozza meg leginkább egy munkafolyamat idejét...
Nem kell mindjárt egy 3D marásra gondolni... elég egy nyák furására...
Hogy látjátok ezt? Rosszul látom? Kétszeres sebességű gépet is megesz egy kétszeres gyorsítással bíró... szerintem... :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 12, 20:59
Írta: 000000000 Dátum 2007 június 12, 20:59
Ez nem válasz a kérdésre.
Éppen azt probáltam elmagyarázni, hogy a kisebb sebességekhez negyobb, míg a nagyobb sebességekhez kisebb gyorsulás kellene, és ezt a "hardware" tudja is, a Mach talán nem? (nem átállítgatni, hanem egy gyorsulásgörbét rajzolni)
Éppen azt probáltam elmagyarázni, hogy a kisebb sebességekhez negyobb, míg a nagyobb sebességekhez kisebb gyorsulás kellene, és ezt a "hardware" tudja is, a Mach talán nem? (nem átállítgatni, hanem egy gyorsulásgörbét rajzolni)
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 12, 21:20
Írta: bmejdz9nu Dátum 2007 június 12, 21:20
De hát... szerintem a progik csak egyfajta gyorsítási beállítást tudnak... vagy?
Tehát ha 100mm/s-ra tud a "rendszer" 1 sec alatt felgyorsítani... akkor ha te 50 mm/s akarsz.... akkor ~0,5mp alatt meg lesz...
Ha lináris a gyorsítási művelet?... de ezt nem tudom... talán István... de gondolom az...
Tehát ha 100mm/s-ra tud a "rendszer" 1 sec alatt felgyorsítani... akkor ha te 50 mm/s akarsz.... akkor ~0,5mp alatt meg lesz...
Ha lináris a gyorsítási művelet?... de ezt nem tudom... talán István... de gondolom az...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 12, 21:22
Írta: bmejdz9nu Dátum 2007 június 12, 21:22
De hát... szerintem a progik csak egyfajta gyorsítási beállítást tudnak... vagy?
Tehát ha 100mm/s-ra tud a "rendszer" 1 sec alatt felgyorsítani... akkor ha te 50 mm/s akarsz.... akkor ~0,5mp alatt meg lesz...
Ha lináris a gyorsítási művelet?... de ezt nem tudom... talán István... de gondolom az...
Tehát ha 100mm/s-ra tud a "rendszer" 1 sec alatt felgyorsítani... akkor ha te 50 mm/s akarsz.... akkor ~0,5mp alatt meg lesz...
Ha lináris a gyorsítási művelet?... de ezt nem tudom... talán István... de gondolom az...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 12, 22:44
Írta: 000000000 Dátum 2007 június 12, 22:44
Ez egy kicsit bonyolultabb téma.
Ha folytonos, folyamatos függvényként kezeljük
a folymatot, akkor a gyorsulás az út
időszerinti másodfokú differenciál hányadosa,
a sebesség pedig elsőfokú. Nem hiszem,
hogy hobby szinten ilyen számításokat tudó,
és paraméterezhető vezérlő program megfizethető
lenne.
Ha folytonos, folyamatos függvényként kezeljük
a folymatot, akkor a gyorsulás az út
időszerinti másodfokú differenciál hányadosa,
a sebesség pedig elsőfokú. Nem hiszem,
hogy hobby szinten ilyen számításokat tudó,
és paraméterezhető vezérlő program megfizethető
lenne.
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2007 június 12, 22:50
Írta: e3h0cv4ph Dátum 2007 június 12, 22:50
Elgondolkodtató a kérdésed.
De szerintem egy tömeget gyorsítani 0-ról 100 -ra ugyanakkora erővel lehet mint 100-ról 200-ra. Ezért szerintem nem kell különböző gyorsításérték a különböző sebességeknél.
Egyébként a nagy gépeken is csak egy gyorsulásérték van.
Az persze más kérdés, hogy egy léptetőmotoros hajtás szempontjából a nagyobb sebességek felé (mert itt csökken a nyomatékuk) kisebb dinamikát kellene rendelni. Egy szervó hajtásnál ilyen gond nincs hiszen a szervó motor karakterisztikája lineáris.
A Mach (és a többiek is) nem tudják, hogy a Step/Dir jeleire te milyen hajtást kapcsolsz.
Harmadrészt pedig programtechnikailag sem könnyű lenne megírni, hogy a Mach egy tetszőleges (általad rajzolt) grafikon alapján gyorsítsa a Step jeleket. És nem hiszem, hogy ezzel a módszerrel sokkal nagyobb sebességeket érnél el.
Üdv:TT
De szerintem egy tömeget gyorsítani 0-ról 100 -ra ugyanakkora erővel lehet mint 100-ról 200-ra. Ezért szerintem nem kell különböző gyorsításérték a különböző sebességeknél.
Egyébként a nagy gépeken is csak egy gyorsulásérték van.
Az persze más kérdés, hogy egy léptetőmotoros hajtás szempontjából a nagyobb sebességek felé (mert itt csökken a nyomatékuk) kisebb dinamikát kellene rendelni. Egy szervó hajtásnál ilyen gond nincs hiszen a szervó motor karakterisztikája lineáris.
A Mach (és a többiek is) nem tudják, hogy a Step/Dir jeleire te milyen hajtást kapcsolsz.
Harmadrészt pedig programtechnikailag sem könnyű lenne megírni, hogy a Mach egy tetszőleges (általad rajzolt) grafikon alapján gyorsítsa a Step jeleket. És nem hiszem, hogy ezzel a módszerrel sokkal nagyobb sebességeket érnél el.
Üdv:TT
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 12, 23:39
Írta: 000000000 Dátum 2007 június 12, 23:39
Szervusz Tibor!
És nem hobby szinten, tudsz ilyen programot mondani?
(Egyébként van egy gyanúm, hogy a Gecko plugin EZ éppen ezt csinálja a Mach3-mal, ez benne a spanyol viasz, és az encoder is ennek a mindenkori kritikus határnak a "felmérését" látja el)
És nem hobby szinten, tudsz ilyen programot mondani?
(Egyébként van egy gyanúm, hogy a Gecko plugin EZ éppen ezt csinálja a Mach3-mal, ez benne a spanyol viasz, és az encoder is ennek a mindenkori kritikus határnak a "felmérését" látja el)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 12, 23:57
Írta: 000000000 Dátum 2007 június 12, 23:57
Ráéreztél a dologra :) Találtál egy újabb előnyt a szervó javára : lineáris nyomaték - sebesség jelleggörbe [#vigyor5]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 00:03
Írta: 000000000 Dátum 2007 június 13, 00:03
Amit Szobrász mond, nem is a deriválástól bonyolult, mivel diszkrét rendszerekben megoldható egyszerűen a többszörös deriválás is, hanem attól, hogy ha tudná a vezérlő ezt a funkciót, akkor ismernie kéne a motorod nyomaték/sebesség jelleggörbéjét, ilyen beviteli lehetőséggel még nem találkoztam.. ráadásul elég számításigényes lenne a dolog "fgv. linearizálás" Szóval szerintem a vezérlőprogramok csak lineáris gyorsítást tudnak, legalábbis amiket eddig ismerek.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 00:18
Írta: 000000000 Dátum 2007 június 13, 00:18
"Egyébként a nagy gépeken is csak egy gyorsulásérték van"
Igen, mert az általában AC szervo, aminek minden fordulaton azonos a nyomatéka (csak a legeslegvégén esik valamicskét) A DC-nél meg - noha nem állandó a nyomaték, hanem a sebességgel együtt növekszik, ki akarna éppen a nagyobb sebességnél (jog módban) ráhajtatni, mint a mérgezett egér, aztán meg lassíthatja, aki tudja...
De! A léptető esetében egy kicsit alábecsülöd ezt a kérdést (szerintem). Mert ha alacsony Pl.: kezdő sebességnél nagy gyorsulásunk van (3d marásnál jár a Z mint a varrógép, de "síkban" is akad gyorsulás bőven), amit bír is a léptető, Jog módban pedig sebességünk, akkor ennek a végeredménye akár olyan mértékű időmegtakarítás is lehet, aminek már komoly létjogosultsága van!
Nézd meg Trapista videóját és képzeld hozzá, hogy az elején komolyan gyorsul, aztán bár fogyott belőle a szufla, a közepére érve mégis nagy sebességet ér el - illetve, mert még marad rá útja ennél is nagyobbat – majd ahogyan lassít, egyre és egyre agresszívabban veszti el a sebességét. Nem kérdés, hogy így sokkal hatékonyabb lenne a gépe, hiszen nem kellett annyit tökölni, mire végre felgyorsulna, majd lelassulna és így kevesebb idő alatt tenné meg az adott utat… Tehát a cél nem is a sokkal nagyobb sebesség elérése, hanem az adott út megtételéhez szükséges idő (szerintem nagy mértékű) csökkentése.
A kérdés az, hogy hogyan lenne képes egy program ezt a komoly számítást elvégezni, nem pedig az, hogy minek. Ha csak kézzel, kísérletezés és ráhagyás módszerével is, de felrajzolhatnánk ezt a bizonyos gyorsulási görbét, igen nagy haszna lehetne.
Áron
Igen, mert az általában AC szervo, aminek minden fordulaton azonos a nyomatéka (csak a legeslegvégén esik valamicskét) A DC-nél meg - noha nem állandó a nyomaték, hanem a sebességgel együtt növekszik, ki akarna éppen a nagyobb sebességnél (jog módban) ráhajtatni, mint a mérgezett egér, aztán meg lassíthatja, aki tudja...
De! A léptető esetében egy kicsit alábecsülöd ezt a kérdést (szerintem). Mert ha alacsony Pl.: kezdő sebességnél nagy gyorsulásunk van (3d marásnál jár a Z mint a varrógép, de "síkban" is akad gyorsulás bőven), amit bír is a léptető, Jog módban pedig sebességünk, akkor ennek a végeredménye akár olyan mértékű időmegtakarítás is lehet, aminek már komoly létjogosultsága van!
Nézd meg Trapista videóját és képzeld hozzá, hogy az elején komolyan gyorsul, aztán bár fogyott belőle a szufla, a közepére érve mégis nagy sebességet ér el - illetve, mert még marad rá útja ennél is nagyobbat – majd ahogyan lassít, egyre és egyre agresszívabban veszti el a sebességét. Nem kérdés, hogy így sokkal hatékonyabb lenne a gépe, hiszen nem kellett annyit tökölni, mire végre felgyorsulna, majd lelassulna és így kevesebb idő alatt tenné meg az adott utat… Tehát a cél nem is a sokkal nagyobb sebesség elérése, hanem az adott út megtételéhez szükséges idő (szerintem nagy mértékű) csökkentése.
A kérdés az, hogy hogyan lenne képes egy program ezt a komoly számítást elvégezni, nem pedig az, hogy minek. Ha csak kézzel, kísérletezés és ráhagyás módszerével is, de felrajzolhatnánk ezt a bizonyos gyorsulási görbét, igen nagy haszna lehetne.
Áron
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 00:26
Írta: 000000000 Dátum 2007 június 13, 00:26
Szia Tyutyi!
Én idáig abban a hitben voltam, hogy ezt a programok tudják, és ezért nem éreztem olyan kínosnak a léptetőt...
De tuti hogy tudhatnák!
A nyomaték/sebesség jelgörbét meg lehet mérni, kicsit lehet belőle faragni (biztonsági százalék) és kész.
Én idáig abban a hitben voltam, hogy ezt a programok tudják, és ezért nem éreztem olyan kínosnak a léptetőt...
De tuti hogy tudhatnák!
A nyomaték/sebesség jelgörbét meg lehet mérni, kicsit lehet belőle faragni (biztonsági százalék) és kész.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 00:29
Írta: 000000000 Dátum 2007 június 13, 00:29
http://www.artsoftcontrols.com/Videos/QuantumPlanner/QuantumPlanner.html
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 00:30
Írta: 000000000 Dátum 2007 június 13, 00:30
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 00:35
Írta: 000000000 Dátum 2007 június 13, 00:35
Én még nem láttam élőben a Mach-ot, de mintha ez nem is az lenne... Nem értem. Pontosan mit is demonstrál ez?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 00:42
Írta: 000000000 Dátum 2007 június 13, 00:42
Még annyit, az egész témakörhöz, hogy ha megoldható lenne ez a gyorsulási görbe ügy, a mechanikára ez azért nagyobb feladatot ró, tehát jóval erősebbnek is kell lennie (én e szerint terveztem).
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 06:27
Írta: 000000000 Dátum 2007 június 13, 06:27
A Mach lineáris gyorsítást és lassítást tud "csak". Ezt még fejelni lehetne (de minek) azzal is, hogy megmunkálási (terhelt) vagy jog módi (terheletlen) gyorsítást is figyelhetné...
De ez már itt szerintem csak nyuansznyi teljesítményeket emelne a rendszeren, cserébe a szoftver jóval több és bonyolultabb számításokkal terhelné a CPU-t és a bekonfigolása is pilóta vizsgát igényelne...
De ez már itt szerintem csak nyuansznyi teljesítményeket emelne a rendszeren, cserébe a szoftver jóval több és bonyolultabb számításokkal terhelné a CPU-t és a bekonfigolása is pilóta vizsgát igényelne...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 13, 07:44
Írta: bmejdz9nu Dátum 2007 június 13, 07:44
Jókat írtatok... tanulságos...
Akkor egyetértetek velem abban, hogy a gyorsulási képesség fontosabb mint a végsebesség... összességében?
(Ha csak nem valami tábla szeletelő gépről van szó... pl. asztalos ipari lapszabász gépről...)
Csak ezért, mert itt a fórumon általában mindenk a sebességel foglalkozik...
Pedíg olyan autó sem venne ami 300Km-el tud menni de 30mp alatt van 100-on... :)
mert összeségében általános használatra ....
Akkor egyetértetek velem abban, hogy a gyorsulási képesség fontosabb mint a végsebesség... összességében?
(Ha csak nem valami tábla szeletelő gépről van szó... pl. asztalos ipari lapszabász gépről...)
Csak ezért, mert itt a fórumon általában mindenk a sebességel foglalkozik...
Pedíg olyan autó sem venne ami 300Km-el tud menni de 30mp alatt van 100-on... :)
mert összeségében általános használatra ....
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2007 június 13, 08:14
Írta: e3h0cv4ph Dátum 2007 június 13, 08:14
Hát igen.
Hiába van olyan ferrárid ami 300 Km/ó val megy, ha városba ugyis csak 50-el mehetsz. És ha városba (megmunkálás módban) A pontból B-be akarsz jutni akkor nem a végsebesség számít hanem a gyorsítás.
De ha kimész a német autópályára akkor ....
Az, hogy kinek melyik a fontosabb az felhasználás és gépkialakítás függő, szerintem. Ha például egy bonyolúlt felületet marsz (ami órákig tart) akkor a végsebesség fokozásával nem sokban gyorsítod meg a munkát.
Viszont például az én faesztergámon (1500 mm hossz) egy korlátoszlopo gyártáskor végez egy fogással (a sok közül) akoor gyorsjáratban (max sebesség) jön vissza az elejére, ezt a másfél métert nem mindegy, hogy mennyi idő alatt teszi meg. Nem sokára én is készítek videókat tesztekről. (csak indulna már el)
Üdv: TT
Hiába van olyan ferrárid ami 300 Km/ó val megy, ha városba ugyis csak 50-el mehetsz. És ha városba (megmunkálás módban) A pontból B-be akarsz jutni akkor nem a végsebesség számít hanem a gyorsítás.
De ha kimész a német autópályára akkor ....
Az, hogy kinek melyik a fontosabb az felhasználás és gépkialakítás függő, szerintem. Ha például egy bonyolúlt felületet marsz (ami órákig tart) akkor a végsebesség fokozásával nem sokban gyorsítod meg a munkát.
Viszont például az én faesztergámon (1500 mm hossz) egy korlátoszlopo gyártáskor végez egy fogással (a sok közül) akoor gyorsjáratban (max sebesség) jön vissza az elejére, ezt a másfél métert nem mindegy, hogy mennyi idő alatt teszi meg. Nem sokára én is készítek videókat tesztekről. (csak indulna már el)
Üdv: TT
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2007 június 13, 08:21
Írta: e3h0cv4ph Dátum 2007 június 13, 08:21
Szia áron.
Azt írtad, hogy a mechanikádat úgy tervezted, hogy a gyorsítást nem lineárisan hanem görbe alapján történik. Ez milyen tervezési szempontokat jelent, mert én ilyenekre nem gondoltam?
Azt írtad, hogy a mechanikádat úgy tervezted, hogy a gyorsítást nem lineárisan hanem görbe alapján történik. Ez milyen tervezési szempontokat jelent, mert én ilyenekre nem gondoltam?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 08:22
Írta: 000000000 Dátum 2007 június 13, 08:22
Többen írtátok: lineáris gyorsulás...
Szerintem a következő a helyes:
A gyorsulás állandó (konstans), ennek idő
szerinti integráltja a sebesség, ez lesz
lineáris, a sebesség integráltja pedig az út,
ez másodfokú (parabola) függvény.
Aztán ezt is írtad:
"A DC-nél meg - noha nem állandó a nyomaték,
hanem a sebességgel együtt növekszik". Ez nem
így van DC szervónál. A vezérlőn általában
van egy funkció, ahol a nyomaték maximumát a
fordulattól függetlenül beállíthatod.
A léptetőmotor pedig mindig léptető motor marad,
nem érdemes rá szabályzást építeni. Inkább
akkor szervómotoros hajtásra kell áttérni, ott
jobb esteben van olyan motor (szervomotor), ami
végre is hajtja adott minimális időállandó
mellett a kiadott gyorsítási parancsokat.
Szerintem a következő a helyes:
A gyorsulás állandó (konstans), ennek idő
szerinti integráltja a sebesség, ez lesz
lineáris, a sebesség integráltja pedig az út,
ez másodfokú (parabola) függvény.
Aztán ezt is írtad:
"A DC-nél meg - noha nem állandó a nyomaték,
hanem a sebességgel együtt növekszik". Ez nem
így van DC szervónál. A vezérlőn általában
van egy funkció, ahol a nyomaték maximumát a
fordulattól függetlenül beállíthatod.
A léptetőmotor pedig mindig léptető motor marad,
nem érdemes rá szabályzást építeni. Inkább
akkor szervómotoros hajtásra kell áttérni, ott
jobb esteben van olyan motor (szervomotor), ami
végre is hajtja adott minimális időállandó
mellett a kiadott gyorsítási parancsokat.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 13, 08:41
Írta: bmejdz9nu Dátum 2007 június 13, 08:41
De az "átlag" nem jár ki a német autópályára ...[#nyes]
A Ferrari nemcsak gyors... hanem gyorsulni is túd... Ez ám a jó "egyveleg"... tehát a zöldlámpától - zöld lámpáig is tud... sőt előzni is...:)
Videót várjuk! "Részeredmények" is nagyon fontosak! Mint láthatod...
A Ferrari nemcsak gyors... hanem gyorsulni is túd... Ez ám a jó "egyveleg"... tehát a zöldlámpától - zöld lámpáig is tud... sőt előzni is...:)
Videót várjuk! "Részeredmények" is nagyon fontosak! Mint láthatod...
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2007 június 13, 08:49
Írta: e3h0cv4ph Dátum 2007 június 13, 08:49
Igen hibásan írtuk.
A sebességre gondoltunk a gyorsítási szakaszban, ami lineáris.
A sebességre gondoltunk a gyorsítási szakaszban, ami lineáris.
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 13, 08:56
Írta: 4mjnxdwuu Dátum 2007 június 13, 08:56
Hali.
kép
Itt pl a Z elmozdulás minimális, 2 lépés/mm-re van állitva (nem motort hajt) full seb, full gyorsítás, 0,5mm mélység beállítva.-thát 1 db step jel-
X-Y-t 5000mm/sec2-re állítva nem igazán vettem észre rövidebb megmunkálási időt, mint "nagy sebesség és kis gyorsítás esetén" (lépés 0,5mm-ként)
kép
Itt pl a Z elmozdulás minimális, 2 lépés/mm-re van állitva (nem motort hajt) full seb, full gyorsítás, 0,5mm mélység beállítva.-thát 1 db step jel-
X-Y-t 5000mm/sec2-re állítva nem igazán vettem észre rövidebb megmunkálási időt, mint "nagy sebesség és kis gyorsítás esetén" (lépés 0,5mm-ként)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 09:31
Írta: 000000000 Dátum 2007 június 13, 09:31
Nézd meg a videót a #1270-ben, pont az ellenkezőjét mutatja :) bár ez egy Beta verzió "quantum" vagy mi..
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 09:40
Írta: 000000000 Dátum 2007 június 13, 09:40
Hát ja, a gyorsulás függvény konstans és egyben értelemszerűen lineáris, a konstans és a lineáris közötti különbség lényeges, a konstans jelző annyival több, hogy a fgv. érték állandó, vagyis a fgv. időben ábrázolva párhuzamos az idő tengellyel.
Gondolom az állandó nyomaték alatt a sebességhez tartozó maximális nyomatékot értették :) Legalábbis úgy lenne helyes, közelítőleg.
Igen, így az inegrálja, mivel a diff és az integrálás inverz műveletek. Szóval csak attól függ, hogy honan nézzük.[#pias]
Egyetértek, felesleges léptetőmotorra azabályzást építeni, nem arra lett kitalálva...
Gondolom az állandó nyomaték alatt a sebességhez tartozó maximális nyomatékot értették :) Legalábbis úgy lenne helyes, közelítőleg.
Igen, így az inegrálja, mivel a diff és az integrálás inverz műveletek. Szóval csak attól függ, hogy honan nézzük.[#pias]
Egyetértek, felesleges léptetőmotorra azabályzást építeni, nem arra lett kitalálva...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 10:25
Írta: 000000000 Dátum 2007 június 13, 10:25
Sziasztok!
Jó kis felbolydulás :-) !
-Igen Tyutyi, az "állandó nyomaték" alatt a sebességhez tartozó maximális nyomatékot értsétek.
-Tatai, a mechanika tervezésénél azért szempont ez, mert ha beállítható lenne ez a bizonyos görbe, kis fordulatoknál (pl.: 0-x) irtózatosan nagy gyorsulást adna, ami ütésszerűen rántja meg a mechanikát... és ezt moccanás nélkül ki kell bírnia.
-Tibor, szerintem még senki nem épített (valódi) szabályzást léptetőre - noha pontosan úgy néz ki - inkább arról lehet szó, mint amit 1259-ben és az 1264-ben írtam (persze ez csak tipp).
- Péter, én is a gyorsítást tartom a lényegesebbnek, most is ezért agyalunk :-) !
Jó kis felbolydulás :-) !
-Igen Tyutyi, az "állandó nyomaték" alatt a sebességhez tartozó maximális nyomatékot értsétek.
-Tatai, a mechanika tervezésénél azért szempont ez, mert ha beállítható lenne ez a bizonyos görbe, kis fordulatoknál (pl.: 0-x) irtózatosan nagy gyorsulást adna, ami ütésszerűen rántja meg a mechanikát... és ezt moccanás nélkül ki kell bírnia.
-Tibor, szerintem még senki nem épített (valódi) szabályzást léptetőre - noha pontosan úgy néz ki - inkább arról lehet szó, mint amit 1259-ben és az 1264-ben írtam (persze ez csak tipp).
- Péter, én is a gyorsítást tartom a lényegesebbnek, most is ezért agyalunk :-) !
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 10:49
Írta: 000000000 Dátum 2007 június 13, 10:49
"Ezt még fejelni lehetne (de minek) azzal is, hogy megmunkálási (terhelt) vagy jog módi (terheletlen) gyorsítást is figyelhetné... "
Ez engem érdekelne! Ezt most is tudja?
Ez engem érdekelne! Ezt most is tudja?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 10:49
Írta: 000000000 Dátum 2007 június 13, 10:49
#1270-ben felrakott videó egyébként nagyjából erről szól, hogy a sebesség jelleggörbét a gyorsítási és lassítási szakaszon lehet változtatni. Szerintem ez a megoldás a felvetett problémára. Szerintem töltsd le ezt a MACH "quantum"-ot és próbáld ki, hátha jutsz vele valamire :)
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 13, 10:49
Írta: bmejdz9nu Dátum 2007 június 13, 10:49
Most számolgatom a dolgaimat... jól számolok?
Ha 100mm/s-ra 80ms-alatt gyorsul ez ekkor 8mm úthosz?
Hát ezen akkor még jó lenne javítani...
Akkor itt fel sem gyorsult a max.ra... mert ha jó emlékszem 5mm volt a mozgatás...
Ha 100mm/s-ra 80ms-alatt gyorsul ez ekkor 8mm úthosz?
Hát ezen akkor még jó lenne javítani...
Akkor itt fel sem gyorsult a max.ra... mert ha jó emlékszem 5mm volt a mozgatás...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 13, 10:53
Írta: bmejdz9nu Dátum 2007 június 13, 10:53
A videókon olyan meg-meg akadós a mozgás...
Ezt én már régen tudom... csak leírom... csodálom, hogy meg senki nem tette szóvá :)
Ez a WinPC-NC motortesztelő menűpontjának a hülyesége... nem pontos az irányváltási stoppokkal ... nem tudom miért... ez csak egy plugin benne... maga progi sosem csinálna ilyet...
Ezt én már régen tudom... csak leírom... csodálom, hogy meg senki nem tette szóvá :)
Ez a WinPC-NC motortesztelő menűpontjának a hülyesége... nem pontos az irányváltási stoppokkal ... nem tudom miért... ez csak egy plugin benne... maga progi sosem csinálna ilyet...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 10:58
Írta: 000000000 Dátum 2007 június 13, 10:58
Azért ezek sem igazán "görbék". Hegyesebb ez, mint az Ekg, mindíg azonos szög alatt emelkedik és zuhan.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 11:00
Írta: 000000000 Dátum 2007 június 13, 11:00
mindig :-)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 11:04
Írta: 000000000 Dátum 2007 június 13, 11:04
a MACH "quantum"-ra ugyanaz a regisztráció érvényes lesz?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 11:33
Írta: 000000000 Dátum 2007 június 13, 11:33
Meg kéne nézni, hogy mennyire flexibilisen állítható?!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 13:22
Írta: 000000000 Dátum 2007 június 13, 13:22
Péter! Az adataid alapján csak 4 mm a
gyorsítási szakaszod, nem 8. Így 2*4=8 mm kell
minimum, hogy gyorsulva elérje csúcsot, majd
lassítva megálljon. De ez már nagyon jó érték,
elégedett lehetsz, ezzel a verzióval STEP
Király vagy!:) Félek tőle, a komplett kész
géped mechanikája már ezt sem fogja bírni
berezonálás nélkül.
gyorsítási szakaszod, nem 8. Így 2*4=8 mm kell
minimum, hogy gyorsulva elérje csúcsot, majd
lassítva megálljon. De ez már nagyon jó érték,
elégedett lehetsz, ezzel a verzióval STEP
Király vagy!:) Félek tőle, a komplett kész
géped mechanikája már ezt sem fogja bírni
berezonálás nélkül.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 16:16
Írta: 000000000 Dátum 2007 június 13, 16:16
Nem, én sem akarok szabályzást a léptetőre, csak ezt a görbét kellene fölrajzolni a programba. Így komoly mértékben növelhetné minden léptetőmotoros kolléga a gépének a hatásfokát, méghozzá úgy, hogy nem kellett hozzányúlnia sem a mechanikához, sem az elektronikához. Ez azért csak érdekes lehet?!
(((Ha adsz nekem szervót, én elfogadom! [#nevetes1][#nevetes1][#nevetes1])))
(((Ha adsz nekem szervót, én elfogadom! [#nevetes1][#nevetes1][#nevetes1])))
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 13, 17:02
Írta: 4mjnxdwuu Dátum 2007 június 13, 17:02
Üdv Tibor
1249-et átszámolnád csak hogy nem -e én ba.tam el valamit.
Péter 100mm/s-re gyorsit 80ms alatt /azaz 6m/p akkor Ő 1250 mm/s2 -vel gyorsít?
Ha nekem 55mm/s-re gyorsul 5000mm/s2 alatt /azaz 3,3m/p-re 11ms alatt???
Illetve 28mm/s-re, 11000mm/s2-re /azaz 1,68m/p 2,5ms alatt (csk abból gondolom, hogy kb jó mert ezt K-cam alatt kikapcsolt gyorsítással is tudja.)
Mindez csak azért, hogy Péterrel közös nevezőre jussunk....
1249-et átszámolnád csak hogy nem -e én ba.tam el valamit.
Péter 100mm/s-re gyorsit 80ms alatt /azaz 6m/p akkor Ő 1250 mm/s2 -vel gyorsít?
Ha nekem 55mm/s-re gyorsul 5000mm/s2 alatt /azaz 3,3m/p-re 11ms alatt???
Illetve 28mm/s-re, 11000mm/s2-re /azaz 1,68m/p 2,5ms alatt (csk abból gondolom, hogy kb jó mert ezt K-cam alatt kikapcsolt gyorsítással is tudja.)
Mindez csak azért, hogy Péterrel közös nevezőre jussunk....
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 13, 17:20
Írta: bmejdz9nu Dátum 2007 június 13, 17:20
Step király.... de jó... Korona is van? :)
Ez olyan mint a Varsányi féle lapkás esztergakés... [#nyes]
Na de... A mechnika... tudom... Lassan haladok... kisérletezés.... tömöm bele az anyagot...nincs más választásom...most már kezdem kapiska, hogy egy "gyári" ekkora munakterületű gép miért több tonna... :)
Szerintem is... nagyobb gyorsítást csak-csak tudnék... de ehhez mechanikát már nem... de azért majd tépem még magamat...
Ez olyan mint a Varsányi féle lapkás esztergakés... [#nyes]
Na de... A mechnika... tudom... Lassan haladok... kisérletezés.... tömöm bele az anyagot...nincs más választásom...most már kezdem kapiska, hogy egy "gyári" ekkora munakterületű gép miért több tonna... :)
Szerintem is... nagyobb gyorsítást csak-csak tudnék... de ehhez mechanikát már nem... de azért majd tépem még magamat...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 13, 17:24
Írta: bmejdz9nu Dátum 2007 június 13, 17:24
Hűha ez a matek és fizika... nem az erősségem...
Főleg a félreértések a Mach és WinPC-NC gyorsítási beállításaiból adódnak...
De talán más tudja... a kompatibilitást.
(szerintem a WinPC érthetőbb :)
Főleg a félreértések a Mach és WinPC-NC gyorsítási beállításaiból adódnak...
De talán más tudja... a kompatibilitást.
(szerintem a WinPC érthetőbb :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 18:21
Írta: 000000000 Dátum 2007 június 13, 18:21
Szia Trapista!
Lassan már kavarog a fejem a sok adattól...
Szóval:
A. - ha a géped 55ms alatt nullóról felgyorsul
55 mm/s sebességre, akkor a gyorsulásod az
55/0.055=1000mm/s2.
B. - ha 11 ms alatt gyorsul fel, akkor
55/.011=5000 mm/s2 a gyorsulás.
C. - ha 2.5 ms alatt 28 mm/s-re gyorsul, akkor
28/0.0025=11200 mm/s2 a gyorsulás.
Mellesleg megjegyzem, hogy B és C eset nem
nagyon fordulhat elő Nálad, de gyakorlatilag
semmilyen stepmotoros hajtásnál sem, túl szép
lenne.
Lassan már kavarog a fejem a sok adattól...
Szóval:
A. - ha a géped 55ms alatt nullóról felgyorsul
55 mm/s sebességre, akkor a gyorsulásod az
55/0.055=1000mm/s2.
B. - ha 11 ms alatt gyorsul fel, akkor
55/.011=5000 mm/s2 a gyorsulás.
C. - ha 2.5 ms alatt 28 mm/s-re gyorsul, akkor
28/0.0025=11200 mm/s2 a gyorsulás.
Mellesleg megjegyzem, hogy B és C eset nem
nagyon fordulhat elő Nálad, de gyakorlatilag
semmilyen stepmotoros hajtásnál sem, túl szép
lenne.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 18:25
Írta: 000000000 Dátum 2007 június 13, 18:25
Ha van szervomotorod, már adom is kipróbálásra
Neked a szabályzót.:)
Neked a szabályzót.:)
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 13, 19:28
Írta: bmejdz9nu Dátum 2007 június 13, 19:28
Most már encoderje lesz hozzá...[#wink] (lásd adok veszek topik..)
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 13, 22:31
Írta: 4mjnxdwuu Dátum 2007 június 13, 22:31
Üdv.
Ha visszacipelem a csempéket csinálok videót. 16*10-es orsót használok, a C-nél az csak 160-as fordulat.
Ha visszacipelem a csempéket csinálok videót. 16*10-es orsót használok, a C-nél az csak 160-as fordulat.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 23:37
Írta: 000000000 Dátum 2007 június 13, 23:37
Húúúú, én már nem értem a dolgaidat.
Először is 160 1/min fordulathoz Nálad
26.66 mm/s sebesség tartozik és nem 28.
Másrészt pedig ilyen kis fordulatnál nem kell
gyorsítani, ez start-stop step frekvencia is
lehet direktbe egy jó motornál.
Először is 160 1/min fordulathoz Nálad
26.66 mm/s sebesség tartozik és nem 28.
Másrészt pedig ilyen kis fordulatnál nem kell
gyorsítani, ez start-stop step frekvencia is
lehet direktbe egy jó motornál.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 23:38
Írta: 000000000 Dátum 2007 június 13, 23:38
Ja, kabáthoz a gomb...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 13, 23:50
Írta: 000000000 Dátum 2007 június 13, 23:50
Köszönöm Tibor! Attól tartok, csak a szívemet fájdítanám vele. Esélyem sincs mostanában a léptető vezérlés cseréjére... 5 tengely az jó sok, és csak sóvároghatnék a szabályzóidra, miután élőben megtapasztaltam. Pedig biztos vagyok benne, hogy a Tiéd itt a csúcs!
Ami a motorokat illeti, nem, nincsenek, és ez talán a legnehezebb, nem igen tudok semmit elérhető áron (Áron:-) ) ezért föl is adtam. Talán nem örökre! Encoder már van [#circling]
Mindenesetre nagyon rendes vagy, hogy adnál kipróbálásra!
Áron
Ami a motorokat illeti, nem, nincsenek, és ez talán a legnehezebb, nem igen tudok semmit elérhető áron (Áron:-) ) ezért föl is adtam. Talán nem örökre! Encoder már van [#circling]
Mindenesetre nagyon rendes vagy, hogy adnál kipróbálásra!
Áron
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 13, 23:50
Írta: 4mjnxdwuu Dátum 2007 június 13, 23:50
Bocsi a 160-at kerekítettem (lefelé)
Te mondtad,
" Mellesleg megjegyzem, hogy B és C eset nem
nagyon fordulhat elő Nálad, de gyakorlatilag
semmilyen stepmotoros hajtásnál sem, túl szép
lenne. " Erre válaszoltam.
Ez volt ugye a "C".
Akkor kicsit kevesebb a videón szereplő, mint a B de valami "hasonló" 50mm/sec - 5000mm/sec2 40 kg csempe, 29kg asztal, 1x szán szekezet. Tudom nincs fejreállítva. Akkor nem is tudna ennyit de valamivel csak megmérem egyszer.... Ez majdnem "B"-nek elfogadható, - csak úgy gyorsba....
Te mondtad,
" Mellesleg megjegyzem, hogy B és C eset nem
nagyon fordulhat elő Nálad, de gyakorlatilag
semmilyen stepmotoros hajtásnál sem, túl szép
lenne. " Erre válaszoltam.
Ez volt ugye a "C".
Akkor kicsit kevesebb a videón szereplő, mint a B de valami "hasonló" 50mm/sec - 5000mm/sec2 40 kg csempe, 29kg asztal, 1x szán szekezet. Tudom nincs fejreállítva. Akkor nem is tudna ennyit de valamivel csak megmérem egyszer.... Ez majdnem "B"-nek elfogadható, - csak úgy gyorsba....
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 13, 23:52
Írta: 4mjnxdwuu Dátum 2007 június 13, 23:52
Ja , elfelejtettem ?????
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 14, 08:17
Írta: bmejdz9nu Dátum 2007 június 14, 08:17
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 14, 08:24
Írta: 000000000 Dátum 2007 június 14, 08:24
Kedves Áron! Köszi, de azért ne essél túlzásba!
Trapista! Sajna a videódat(mp4) továbbra sem
tudom megnyitni.
Trapista! Sajna a videódat(mp4) továbbra sem
tudom megnyitni.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 14, 08:26
Írta: bmejdz9nu Dátum 2007 június 14, 08:26
már tudod... #1306
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 14, 08:36
Írta: 000000000 Dátum 2007 június 14, 08:36
Köszi Péter, közben átkonvertáltad, így meg is
néztem.
Trapista! Csodálkoznék nagyon, ha ezen a videón
10ms alatt megtörténne a felgyorsulás, és 20ms
alatt pedig egy teljes irányváltás. Nekem
lassabbnak tűnik, bár elég dinamukus azért.
néztem.
Trapista! Csodálkoznék nagyon, ha ezen a videón
10ms alatt megtörténne a felgyorsulás, és 20ms
alatt pedig egy teljes irányváltás. Nekem
lassabbnak tűnik, bár elég dinamukus azért.
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 14, 10:39
Írta: 4mjnxdwuu Dátum 2007 június 14, 10:39
Üdv.
Akkor hazudik a Mach, a beállítások talán kivehetők... Csak azt mondtam amit a Mach.
Akkor hazudik a Mach, a beállítások talán kivehetők... Csak azt mondtam amit a Mach.
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 14, 10:42
Írta: 4mjnxdwuu Dátum 2007 június 14, 10:42
Melyiket nézted, a 0016-t vagy a 0022??? A 0022-nél látszik a beállítás.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 14, 10:53
Írta: bmejdz9nu Dátum 2007 június 14, 10:53
kár, hogy Mach nyelven megy a diskura...
Én meg csak magyar, német, angol és WinPc-nc nyelveket ismerem... se nyelvész, se fizikus, se semmi...
Szerintem ahogy én megfogalmaztam a "gépalvázon" mért erdményeket és dukumentáltam az érthetőbb volt... de ezt is csak gondolom...
Én meg csak magyar, német, angol és WinPc-nc nyelveket ismerem... se nyelvész, se fizikus, se semmi...
Szerintem ahogy én megfogalmaztam a "gépalvázon" mért erdményeket és dukumentáltam az érthetőbb volt... de ezt is csak gondolom...
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 14, 11:17
Írta: 4mjnxdwuu Dátum 2007 június 14, 11:17
Hali
ez 3 m/p volt 10ms gyorsítás alatt. Ha jól számoltam, Bár Tibor Lehet mást mond.
ez 3 m/p volt 10ms gyorsítás alatt. Ha jól számoltam, Bár Tibor Lehet mást mond.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 14, 12:05
Írta: bmejdz9nu Dátum 2007 június 14, 12:05
Én beszéni and érteni "nur" winpc "language"...
setup sebesség: xxxmm/s (milliméter / másodperc)
gyursulás a max sebességre: xxxms (pl. 300ms alatt pl. 60 mm/s-ra..)
Sajnos... de vidók jók! és ez a lényeg!
setup sebesség: xxxmm/s (milliméter / másodperc)
gyursulás a max sebességre: xxxms (pl. 300ms alatt pl. 60 mm/s-ra..)
Sajnos... de vidók jók! és ez a lényeg!
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 14, 12:12
Írta: 4mjnxdwuu Dátum 2007 június 14, 12:12
10ms alatt 50mm/s-re
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 14, 13:02
Írta: 000000000 Dátum 2007 június 14, 13:02
Szia Trapista! Megnéztem mind a kettőt.
A "kopogtatós" látványos, bár ott nem is
40 kg-nyi tömeget emelget Z-nél.
Mondok én Neked két dolgot.
- ha akarod, egyszer küldök Neked egy
tesztprogramot, ami tényleg 10 ms alatt
gyorsítaná fel a gépedet, megnézhetnénk, erre
mit szól.
- de van egy másik lehetőség is: ha tényleg
ilyen jó a géped dinamikája akkora számításaim
szerint a következőr is tudnia kellene:
elmozdulsz vele 0.5 mm majd vissza 0.5 mm-t
Ezt 1 másodperc alatt 25-ször tegye meg.
Erre írjál neki programot, és ezt nézd meg.
Ha ezt meg is teszi hiba nélkül, akkor igaz az állításod, miszerint 10 ms alatt gyorsul fel 50
mm/s-re.
A "kopogtatós" látványos, bár ott nem is
40 kg-nyi tömeget emelget Z-nél.
Mondok én Neked két dolgot.
- ha akarod, egyszer küldök Neked egy
tesztprogramot, ami tényleg 10 ms alatt
gyorsítaná fel a gépedet, megnézhetnénk, erre
mit szól.
- de van egy másik lehetőség is: ha tényleg
ilyen jó a géped dinamikája akkora számításaim
szerint a következőr is tudnia kellene:
elmozdulsz vele 0.5 mm majd vissza 0.5 mm-t
Ezt 1 másodperc alatt 25-ször tegye meg.
Erre írjál neki programot, és ezt nézd meg.
Ha ezt meg is teszi hiba nélkül, akkor igaz az állításod, miszerint 10 ms alatt gyorsul fel 50
mm/s-re.
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 14, 13:09
Írta: 4mjnxdwuu Dátum 2007 június 14, 13:09
Ok, az utóbbit kipróbálom, az előbbit, ha küldöd akkor szívesen.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 14, 14:19
Írta: bmejdz9nu Dátum 2007 június 14, 14:19
10ms alatt 50mm/s-re ? Az olyan mint 20ms alatt 100mm/s-ra...
Akkor le vagyok döntve...[#rinya] De akkor is örülök!...[#circling]
De ez hihetetlen... érték... [#confused] vagy?
Akkor le vagyok döntve...[#rinya] De akkor is örülök!...[#circling]
De ez hihetetlen... érték... [#confused] vagy?
Cím: Re:Léptetőmotor
Írta: vthgizrff Dátum 2007 június 14, 14:23
Írta: vthgizrff Dátum 2007 június 14, 14:23
Ez miért is fontos, hogy hány század másodperc alatt gyorsul fel? Lassan olyanok lesztek mint a volt főnököm, csak ott tömegcikket gyártottunk. Ha egy másodpercet faragott egy alkatrész előállítási idelyéből, az 1% termelésnövekedést jelentett. Hobby szinten nem értem miért fontos ez?
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 14, 14:34
Írta: bmejdz9nu Dátum 2007 június 14, 14:34
tök egyszerű... (szerintem)
Ha pl. 50mm úthosszal tud felgyorsulni a géped akkor ha kicsiket mozog azt csak kevesebb sebességgel teszi majd...de ha 100mm-et megy ekkor akkor is csak 50mm-nél egy pillantra éri el a beállított értéket... mert utánna lassítani fog... ez nem 1%-os kérdés...:)
....olvasd vissza a történeteket...
Ha pl. 50mm úthosszal tud felgyorsulni a géped akkor ha kicsiket mozog azt csak kevesebb sebességgel teszi majd...de ha 100mm-et megy ekkor akkor is csak 50mm-nél egy pillantra éri el a beállított értéket... mert utánna lassítani fog... ez nem 1%-os kérdés...:)
....olvasd vissza a történeteket...
Cím: Re:Léptetőmotor
Írta: vthgizrff Dátum 2007 június 14, 14:44
Írta: vthgizrff Dátum 2007 június 14, 14:44
Aha! Így már értem. De szerintem ha 50mm előgyorsítás kell ahoz, hogy lépéstévesztés nélkül elérjem a maximális sebességet, akkor már régen túlléptem a léptető motor azom fordulatán ahol még nyomaték is van. Szárazon (megmunkálás nélkül) ez még tarható is. De mi lesz ha egy hatos négyélű ujmaró is benne van az anyagban?
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 14, 16:37
Írta: 4mjnxdwuu Dátum 2007 június 14, 16:37
Üdv az 50mm alatt gyorsul fel (#1235) 800mm/sec2 gyorsítással,18 méter/percre. Ezt úgysem használnám ki ekkora területen. Inkább feljebb veszem a gyorsítást, rövidebb út alatt gyorsuljon fel, kisebb sebességre, de ott még legyen ereje. ( mint már halottuk valakinek igen is számítana, hogy a 1,5 méteres korlát megmunkálás után ne vánszorogjon vissza a szán, hanam "üresen" de száguldjon...)
Ha Péter függőleges teszt videóját megnézed látszik, hogy azért valamicske erő még van benne, és nem éppen lassú...
Tibor ötletét megcsinálom mert érdekel, és nagyon jó ötlet, de kezd kicsit sok lenni a bizonygatás. Ha valakit érdekel szívesen megmutatom, bár szerintem csak a 10-es orsó miatt van, talán még nem használt senki ilyet????
Egyébként ezek kihegyezett számok, stabilra nem ide állítanám, hanam legalább 1,5-s ráhagyással, vagy 2-vel.
Ha Péter függőleges teszt videóját megnézed látszik, hogy azért valamicske erő még van benne, és nem éppen lassú...
Tibor ötletét megcsinálom mert érdekel, és nagyon jó ötlet, de kezd kicsit sok lenni a bizonygatás. Ha valakit érdekel szívesen megmutatom, bár szerintem csak a 10-es orsó miatt van, talán még nem használt senki ilyet????
Egyébként ezek kihegyezett számok, stabilra nem ide állítanám, hanam legalább 1,5-s ráhagyással, vagy 2-vel.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 14, 17:07
Írta: 000000000 Dátum 2007 június 14, 17:07
Szerintem felesleges bizonygatni, ha a te igényeidnek megfelel az elért gyorsulás és sebesség, akkor minden rendben.[#awink]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 14, 17:19
Írta: 000000000 Dátum 2007 június 14, 17:19
Szia Trapista!
Csak miattam meg ne csináld a tesztet, épp
eleget nyúztam már a hajtásaimat ezzel, de
szerintem tanulságos Mindenkinek, aki kiváncsi
a gépének határ adataira. Egyébként már a szervó
topicban is írtam ilyesmiről, ez már
tulajdonképpen átviteli függvény tesztnek
számít. Ezt a "kőkemény" tesztet én már többször
javasoltam, de valahogy senki nem veszi
komolyan. Talán most Te megteszed, előre is köszi.
Csak miattam meg ne csináld a tesztet, épp
eleget nyúztam már a hajtásaimat ezzel, de
szerintem tanulságos Mindenkinek, aki kiváncsi
a gépének határ adataira. Egyébként már a szervó
topicban is írtam ilyesmiről, ez már
tulajdonképpen átviteli függvény tesztnek
számít. Ezt a "kőkemény" tesztet én már többször
javasoltam, de valahogy senki nem veszi
komolyan. Talán most Te megteszed, előre is köszi.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 14, 17:21
Írta: 000000000 Dátum 2007 június 14, 17:21
Ja és videóval ne fáradj, elhisszük, amit
tapasztalsz majd.
tapasztalsz majd.
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 14, 18:31
Írta: 4mjnxdwuu Dátum 2007 június 14, 18:31
Üdv.
2 db videót csináltam, most tenném fel de az a mocsok DUNAWEB sz.kodik. (ÉS már kezdek pipa lenni, 1 óra alatt nem tudok feltölteni 2*7 megát.)
Ja a teszt sikerült... ha egyszer felmegy szólok...
2 db videót csináltam, most tenném fel de az a mocsok DUNAWEB sz.kodik. (ÉS már kezdek pipa lenni, 1 óra alatt nem tudok feltölteni 2*7 megát.)
Ja a teszt sikerült... ha egyszer felmegy szólok...
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 14, 18:53
Írta: 4mjnxdwuu Dátum 2007 június 14, 18:53
Az első kicsit sötét, elfelejtettem felkapcsolni a lámpát,( én jól láttam a másodiknál meg kicsit sokára tudtam elindítani a gépet, elfelejtettem, hogy vész stoppot nyom a Mach ha belépek a motortuningba, de talán látható a lényeg.
Ja kisértetiesen hasonlított a teszt arra amikor még K-cammal csináltam a képeket, 0,4-0,5 mm re rugdosta a marót, de ott visszavattem 600mm/p-re a kezdősebességet. nem akartam elhinni mikor a barátnőm kijött a szobából este 11 után, hogy mozog alatta az ágy, és én mi a fenéért fúrom a falat ütvefúróval....[#nevetes1][#awink]
Ja kisértetiesen hasonlított a teszt arra amikor még K-cammal csináltam a képeket, 0,4-0,5 mm re rugdosta a marót, de ott visszavattem 600mm/p-re a kezdősebességet. nem akartam elhinni mikor a barátnőm kijött a szobából este 11 után, hogy mozog alatta az ágy, és én mi a fenéért fúrom a falat ütvefúróval....[#nevetes1][#awink]
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2007 június 14, 19:04
Írta: D.Laci Dátum 2007 június 14, 19:04
"nem akartam elhinni mikor a barátnőm kijött a szobából este 11 után" valami egészen mást akat csak nem vetted a célzást...[#crazya]
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 14, 19:24
Írta: 4mjnxdwuu Dátum 2007 június 14, 19:24
[#falbav][#fejvakaras]
Ez a sötét,talán látszik.
Ez a másik. 5000mm/sec2 50mm/s 0,5mm oda-vissza 25-ször
Ha felteszem 6000mm/sec2-re 6,5mm-t tévedett, ha 5500mm/sec2-re akkor 1,45mm tévedett.
Jó a teszt mindjárt látványosan adja ha nem jó a beállítás...
VPéter, ha tudod légyszíves nyomd át valami emészhető formátumra ( ha időd engedi)köszike.
Ez a sötét,talán látszik.
Ez a másik. 5000mm/sec2 50mm/s 0,5mm oda-vissza 25-ször
Ha felteszem 6000mm/sec2-re 6,5mm-t tévedett, ha 5500mm/sec2-re akkor 1,45mm tévedett.
Jó a teszt mindjárt látványosan adja ha nem jó a beállítás...
VPéter, ha tudod légyszíves nyomd át valami emészhető formátumra ( ha időd engedi)köszike.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 14, 19:29
Írta: 000000000 Dátum 2007 június 14, 19:29
Nálam nincs hang. A G-kódot miért nem ciklussal írod (lásd ékteszt), akkor akár 10000× is mehet a dolog?!
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 14, 19:38
Írta: 4mjnxdwuu Dátum 2007 június 14, 19:38
Nálam még volt, egyiken sincs a mappámból???
Mert még kezdő vagyok, nem nagyon kellet még iyen egyszerű dolgot csinálnom, (csak Corel, rajz, aztán had szóljon)
Mert még kezdő vagyok, nem nagyon kellet még iyen egyszerű dolgot csinálnom, (csak Corel, rajz, aztán had szóljon)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 14, 19:39
Írta: 000000000 Dátum 2007 június 14, 19:39
A többi ok, csak ez a kettő amit utoljára linkeltél, csak ezeknél nincs hang (a Quicktime játsze le nálam).
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 14, 19:40
Írta: bmejdz9nu Dátum 2007 június 14, 19:40
Na most értem haza...
Látom alakul a Stepper Forma 1 csapat [#nyes]
(konvertálás folyamatban... egyébkén nagyon érdekes a videó formátumod... 17,2kocka/mp... stb... de nem gond a videó témában otthon vagyok...)
Kocsikázás közben sok hülyeség az eszembe jutott...
pl. a tesztjem alatt...amikor fel-le huzogatta az a sok ólmot 2 órán keresztül...alíg melegedett a motor és a vezérlő... és a táp...???
Akkor valami még nem jó... többet is tudhat a vezérlési rendszer!? De gőzöm sincs....
Másnak mennyire melegszik? azt olvastam, hogy a léptetőknél és a vezérlőknél ne lépjük át a 70 C-ot... de itt nálam minden csak langyosodott...????
Látom alakul a Stepper Forma 1 csapat [#nyes]
(konvertálás folyamatban... egyébkén nagyon érdekes a videó formátumod... 17,2kocka/mp... stb... de nem gond a videó témában otthon vagyok...)
Kocsikázás közben sok hülyeség az eszembe jutott...
pl. a tesztjem alatt...amikor fel-le huzogatta az a sok ólmot 2 órán keresztül...alíg melegedett a motor és a vezérlő... és a táp...???
Akkor valami még nem jó... többet is tudhat a vezérlési rendszer!? De gőzöm sincs....
Másnak mennyire melegszik? azt olvastam, hogy a léptetőknél és a vezérlőknél ne lépjük át a 70 C-ot... de itt nálam minden csak langyosodott...????
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 14, 19:41
Írta: 4mjnxdwuu Dátum 2007 június 14, 19:41
Pedig ugyanazzal a telefonnal csináltam és nálam van hang is.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 14, 19:43
Írta: 000000000 Dátum 2007 június 14, 19:43
Ezt használhatod tesztként:
(File Szogteszt.tap )
(Wednesday, April 14, 2004)
G90G80G49
F2000
G1 X0.0000 Y0.0000 Z0.0000 A0.0000
M98 P1234 L1000
G1 X0.0000 Y0.0000 Z0.0000 A0.0000
M5M30
O1234
G1 X0.0000 Y0.0000 Z0.0000 A0.0000
G1 X00.1000 Y00.0000 Z0.0000 A0.0000
M99
F-sor a sebesség (itt 2000 mm/perc)
L-az ismétlések száma (itt 1000)
G1 alsó az elmozdulás (itt 0.1mm)
Kopizd egy txt-be és nevezd át .tap-ra!
(File Szogteszt.tap )
(Wednesday, April 14, 2004)
G90G80G49
F2000
G1 X0.0000 Y0.0000 Z0.0000 A0.0000
M98 P1234 L1000
G1 X0.0000 Y0.0000 Z0.0000 A0.0000
M5M30
O1234
G1 X0.0000 Y0.0000 Z0.0000 A0.0000
G1 X00.1000 Y00.0000 Z0.0000 A0.0000
M99
F-sor a sebesség (itt 2000 mm/perc)
L-az ismétlések száma (itt 1000)
G1 alsó az elmozdulás (itt 0.1mm)
Kopizd egy txt-be és nevezd át .tap-ra!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 14, 19:44
Írta: bmejdz9nu Dátum 2007 június 14, 19:44
Pedíg hang nélkül ... :)
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 14, 19:44
Írta: 4mjnxdwuu Dátum 2007 június 14, 19:44
Nekem ami érdekes, A profi 1-el langyos a moci, és kevesebbet tud mint a saját csopperessel, amivel erőssebb, és akár hiszed akár nem 1óra után sem volt 30 fok felett. mintha nem is ment volna...
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 14, 19:45
Írta: 4mjnxdwuu Dátum 2007 június 14, 19:45
Neked van??? Hang??
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 14, 19:46
Írta: 4mjnxdwuu Dátum 2007 június 14, 19:46
Köszike
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 14, 19:46
Írta: 000000000 Dátum 2007 június 14, 19:46
A csopperes jobb, az szabályzás. A P1 Vezérel PWM-je durvább azért melegszik és kicsi a tuningtényezője.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 14, 19:54
Írta: bmejdz9nu Dátum 2007 június 14, 19:54
Van... upload...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 14, 20:19
Írta: bmejdz9nu Dátum 2007 június 14, 20:19
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 14, 20:26
Írta: 000000000 Dátum 2007 június 14, 20:26
Itt már van hang is![#circling]
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 14, 20:35
Írta: bmejdz9nu Dátum 2007 június 14, 20:35
Hát Trapista nem egy operatőr típus...:) Pedíg azért nagyon jó telefonja van....:) ... Remélem nem veszi szíven... :)
Én ma vettem új telefont... de szakítottam ez eddigi "hagyománnyal" ez már semit sem tud csak szinte telefon... Motorola V3-at vettem...
Eddíg egy Sony-Ericcson 2MP-s, mp3-as meg... a zseblámpa funkció volt benne a legjobb ... aztán nálam mindegyik csak egy évet bír... megjött az eszem.., szerintem... :)
Ha lenne benne pl. dugóhúzó... vagy sörnyitó... vagy öngyújtó... :) több hasznát vettem volna....:)
Én ma vettem új telefont... de szakítottam ez eddigi "hagyománnyal" ez már semit sem tud csak szinte telefon... Motorola V3-at vettem...
Eddíg egy Sony-Ericcson 2MP-s, mp3-as meg... a zseblámpa funkció volt benne a legjobb ... aztán nálam mindegyik csak egy évet bír... megjött az eszem.., szerintem... :)
Ha lenne benne pl. dugóhúzó... vagy sörnyitó... vagy öngyújtó... :) több hasznát vettem volna....:)
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 14, 20:52
Írta: 4mjnxdwuu Dátum 2007 június 14, 20:52
Köszike
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 14, 21:23
Írta: 000000000 Dátum 2007 június 14, 21:23
Jó nagy előjáték volt a sötétben!:)
A lényeg: a világosabb videó vége, gratulálok
hozzá. Az azért érződik, hogy nagyon a határon
van már. De ez nem is csoda, ez már szervo
motoros hajtástól is szép teljesítmény.
Persze ott akárhogy gyorsítod, a végén mindig
visszaáll, csak menetközben nem tudja követni.
Szerintem elég jól érzékelteti ez a teszt,
hol is van a lépéstévesztés határa, így
mondhatjuk szegény step motorokra: lassan
járj, tovább élsz és főleg biztonságban.:)
Köszi Trapista, Péter a tesztet, mostmár két
Step Király van a fórumon![#taps]
A lényeg: a világosabb videó vége, gratulálok
hozzá. Az azért érződik, hogy nagyon a határon
van már. De ez nem is csoda, ez már szervo
motoros hajtástól is szép teljesítmény.
Persze ott akárhogy gyorsítod, a végén mindig
visszaáll, csak menetközben nem tudja követni.
Szerintem elég jól érzékelteti ez a teszt,
hol is van a lépéstévesztés határa, így
mondhatjuk szegény step motorokra: lassan
járj, tovább élsz és főleg biztonságban.:)
Köszi Trapista, Péter a tesztet, mostmár két
Step Király van a fórumon![#taps]
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 14, 21:39
Írta: bmejdz9nu Dátum 2007 június 14, 21:39
Királyság :)... Fejlesztek tovább....
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 14, 22:05
Írta: 4mjnxdwuu Dátum 2007 június 14, 22:05
A #1329-végén lévő tapasztalat az tényleg sokatmondó...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 14, 22:20
Írta: 000000000 Dátum 2007 június 14, 22:20
Órülök neki, hogy hasznosnak érzed a tesztet.
Azt gondolom, Te és Péter is igencsak
kihoztátok nagyjából a maximumot a hajtás
rendszeretekből, és nagyon is szépek ezek a
teljesítmények, egyfajta refernciát jelentenek
más gépépítőknek is.
Azt meg mindenkinek a fantáziájára bíznám,
mekkora lenne a pozíciótévesztés függőleges
síkban állandó súlyterhelés alatt.
Azt gondolom, Te és Péter is igencsak
kihoztátok nagyjából a maximumot a hajtás
rendszeretekből, és nagyon is szépek ezek a
teljesítmények, egyfajta refernciát jelentenek
más gépépítőknek is.
Azt meg mindenkinek a fantáziájára bíznám,
mekkora lenne a pozíciótévesztés függőleges
síkban állandó súlyterhelés alatt.
Cím: Re:Léptetőmotor
Írta: uzahitefr Dátum 2007 június 14, 22:37
Írta: uzahitefr Dátum 2007 június 14, 22:37
Magi István úrhoz kérdés. elöreláthatolag mikor készül el a h1 vezérlő? tudom nem illik megzavarni a mestert a mukában!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 15, 06:42
Írta: 000000000 Dátum 2007 június 15, 06:42
Az ilyeneket inkább magánban (ezek nem ide valók)!
A jövőhét elején postázom, kis türelmet még!
A jövőhét elején postázom, kis türelmet még!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 16, 09:40
Írta: bmejdz9nu Dátum 2007 június 16, 09:40
A léptető motorok encoderrel való "biztonsági" figyelése megoldott? (az ördög nem alszik...:)
Erről már irogattunk, hogy vannak bontásból olyan léptetők amelyeken encoder van...?
Erről már irogattunk, hogy vannak bontásból olyan léptetők amelyeken encoder van...?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 16, 15:24
Írta: 000000000 Dátum 2007 június 16, 15:24
Minden megoldható, csak szerintem nem éri meg hobbi szinten...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 16, 15:29
Írta: bmejdz9nu Dátum 2007 június 16, 15:29
Elképzelek egy olyan megoldást ahol a mechanikát olyan "rosszra" csinálja amilyenre csak "akarja" az ember... :)
Sőt egy olyan mérési módszert is el bírnák képzelni (lineáris méréshez hasonlóan) amikor nem a terhelt(!) hajtótengelyt "mérjük"...
Ez lenne a csoda...
Sőt egy olyan mérési módszert is el bírnák képzelni (lineáris méréshez hasonlóan) amikor nem a terhelt(!) hajtótengelyt "mérjük"...
Ez lenne a csoda...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 16, 16:02
Írta: 000000000 Dátum 2007 június 16, 16:02
Megoldott, de nem sok cég csinál ilyet, ipari hajtástechnikában a léptetőmotort nem igazán alkalmazzák, elavultnak tekinthető. Ráadásul normálisan nem lehet megoldani. A normális alatt azt értem, hogy úgy működjön, mint egy szervó, csak úgy, hogy a vezérlőszoftver figyeli az encodert és ha nem megfelelő a pozició, akkor addig lassítja a mozgást, amíg a motor behozza a lemaradást. Ez egy komoly berendezésben nem megengedhető, mert modjuk a szerszám a lassítás miatt beleég az anyagba, vagy mondjuk festékszórásnál egyenetlen lesz a felület, stb.
Pl. a Galilmc csinál ilyen hajtásokat, de rohadt drágák, nem hobbi célra gyártanak :( Vagy mondjuk a G100-as a Gecko-tól is tudja ezt, az már barátságosabb áron.
Pl. a Galilmc csinál ilyen hajtásokat, de rohadt drágák, nem hobbi célra gyártanak :( Vagy mondjuk a G100-as a Gecko-tól is tudja ezt, az már barátságosabb áron.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 16, 16:20
Írta: bmejdz9nu Dátum 2007 június 16, 16:20
G-Rex G100 Erre gondolsz?
Ezt ma vettem észre... jobban mondva halottam meg...:)
Még nem néztem át alapossan de úgy tünik ez az első megfizethető visszacsatolt "LPT port" amit eddíg láttam :) :) Persze USB-n...
Hogy aztán van e szükség rá az egy másik kérdés... Az sem biztos... de egy lehetőség...
Sőt nem is akármilyen lehetőség...
De ilyet csak a Gecko csinál senki más?

Mondjuk ez megoldott...
A másik az a függeltenített útmérés...
Talán egy kicsi pontos segéd orsóval? vagy egy bóvdenes dologgal... ebben csak az lehet az érdekes, hogyha függetlenítve lenne a terheléstől... persze ezek csak elméleti futtatások...
Talán össze kellene gyúrni a léptetőt a szervóval...? Vagy a léptetőt hajtani mint szervót? [#conf]
Ezt ma vettem észre... jobban mondva halottam meg...:)
Még nem néztem át alapossan de úgy tünik ez az első megfizethető visszacsatolt "LPT port" amit eddíg láttam :) :) Persze USB-n...
Hogy aztán van e szükség rá az egy másik kérdés... Az sem biztos... de egy lehetőség...
Sőt nem is akármilyen lehetőség...
De ilyet csak a Gecko csinál senki más?
Mondjuk ez megoldott...
A másik az a függeltenített útmérés...
Talán egy kicsi pontos segéd orsóval? vagy egy bóvdenes dologgal... ebben csak az lehet az érdekes, hogyha függetlenítve lenne a terheléstől... persze ezek csak elméleti futtatások...
Talán össze kellene gyúrni a léptetőt a szervóval...? Vagy a léptetőt hajtani mint szervót? [#conf]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 16, 16:27
Írta: 000000000 Dátum 2007 június 16, 16:27
Igen, erre Gondoltam.
"De ilyet csak a Gecko csinál senki más?"
Olvasd el mégegyszer a #1355-ös hozzászólásomat, két példát is írtam.
"Talán össze kellene gyúrni a léptetőt a szervóval...? Vagy a léptetőt hajtani mint szervót?"
Akkor idézném ismét magamat(#1355):
Ráadásul normálisan nem lehet megoldani. A normális alatt azt értem, hogy úgy működjön, mint egy szervó, csak úgy, hogy a vezérlőszoftver figyeli az encodert és ha nem megfelelő a pozició, akkor addig lassítja a mozgást, amíg a motor behozza a lemaradást. Ez egy komoly berendezésben nem megengedhető, mert modjuk a szerszám a lassítás miatt beleég az anyagba, vagy mondjuk festékszórásnál egyenetlen lesz a felület, stb.
"De ilyet csak a Gecko csinál senki más?"
Olvasd el mégegyszer a #1355-ös hozzászólásomat, két példát is írtam.
"Talán össze kellene gyúrni a léptetőt a szervóval...? Vagy a léptetőt hajtani mint szervót?"
Akkor idézném ismét magamat(#1355):
Ráadásul normálisan nem lehet megoldani. A normális alatt azt értem, hogy úgy működjön, mint egy szervó, csak úgy, hogy a vezérlőszoftver figyeli az encodert és ha nem megfelelő a pozició, akkor addig lassítja a mozgást, amíg a motor behozza a lemaradást. Ez egy komoly berendezésben nem megengedhető, mert modjuk a szerszám a lassítás miatt beleég az anyagba, vagy mondjuk festékszórásnál egyenetlen lesz a felület, stb.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 16, 17:41
Írta: bmejdz9nu Dátum 2007 június 16, 17:41
"Galilmc csinál ilyen hajtásokat, de rohadt drágák, nem hobbi célra gyártanak"
Ezt írtad...
Biztos a Yakasawa, Siemens, Omron és sokan mások is gyártanak... de nem hobby célra... sőt az árát sem lehet tudni...
Csak (ismereteim szerint) a Geckonak van publikus ára 250-400 USD 6 csatornára... ez még talán a hobby-n belül van "árban"...
Ezt írtad...
Biztos a Yakasawa, Siemens, Omron és sokan mások is gyártanak... de nem hobby célra... sőt az árát sem lehet tudni...
Csak (ismereteim szerint) a Geckonak van publikus ára 250-400 USD 6 csatornára... ez még talán a hobby-n belül van "árban"...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 17, 13:16
Írta: 000000000 Dátum 2007 június 17, 13:16
Csak mert két példát hoztam fel, igaz többről nem is tudok, pedig ismerek pár vezérlést :)
Igen, írtam, hogy a Gecko barátibb áron dolgozik, a Galilmc-nek $1000-$10000-es nagyságrendűek az árai, de komoly cuccokról van szó!
Siemens, Omron vezérlésekkel szoktam dolgozni, de még nem találkoztam ilyennel...
Igen, írtam, hogy a Gecko barátibb áron dolgozik, a Galilmc-nek $1000-$10000-es nagyságrendűek az árai, de komoly cuccokról van szó!
Siemens, Omron vezérlésekkel szoktam dolgozni, de még nem találkoztam ilyennel...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 17, 13:50
Írta: bmejdz9nu Dátum 2007 június 17, 13:50
Na kicsit még faragtam a léptetőmotor vezérlésen... [#hawaii]
Érdekes dolgokat tapasztaltam... amire nem is gondoltam volna... :)
Videó feltöltés alatt...
Érdekes dolgokat tapasztaltam... amire nem is gondoltam volna... :)
Videó feltöltés alatt...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 17, 14:43
Írta: bmejdz9nu Dátum 2007 június 17, 14:43
Feljavítottam az eredményeket... :)
Most már stabilan tudja a 120mm/s-ot (előző tesztben: 100mm/s volt)
De a gyorsítás nővelése szerintem a legnagyobb eredmény....
Most 60ms alatt van 120mm/s-on! (előző tesztben 80ms alatt gyorsult csak 100mm/s-re)
De ami az érdekes... 20%-al rosszabb eredményt lehetet csak elérni, ha félépésben (400lépés/f) ment vagy ha 8-ados (1600lépés/f) volt a beállítás!
A legjobb eredményt a negyedes (800lépés/ford) hozta!!! Ez azért érdekes...
Most jóval több beállítást végigpróbáltam... itt a vég szerintem az 50V táppal és ezekkel a "csak" 2,8Nm-es motorokkal... :)
Terhelési súly azonos #1126-ban...
(függőleges teszt most nem volt... de gyaníthatóan az is arányosan jobb lett ... #1159-ben)
Most már mindent le kellett kötözni az asztalhoz... kényszer volt!
Több órát ment... lépésvesztés nem volt...
Video ---- 120mm/s (7,2 méter/perc) ... gyorsítás 120mm/s-ra 60ms-alatt !!!
Most már stabilan tudja a 120mm/s-ot (előző tesztben: 100mm/s volt)
De a gyorsítás nővelése szerintem a legnagyobb eredmény....
Most 60ms alatt van 120mm/s-on! (előző tesztben 80ms alatt gyorsult csak 100mm/s-re)
De ami az érdekes... 20%-al rosszabb eredményt lehetet csak elérni, ha félépésben (400lépés/f) ment vagy ha 8-ados (1600lépés/f) volt a beállítás!
A legjobb eredményt a negyedes (800lépés/ford) hozta!!! Ez azért érdekes...
Most jóval több beállítást végigpróbáltam... itt a vég szerintem az 50V táppal és ezekkel a "csak" 2,8Nm-es motorokkal... :)
Terhelési súly azonos #1126-ban...
(függőleges teszt most nem volt... de gyaníthatóan az is arányosan jobb lett ... #1159-ben)
Most már mindent le kellett kötözni az asztalhoz... kényszer volt!
Több órát ment... lépésvesztés nem volt...
Video ---- 120mm/s (7,2 méter/perc) ... gyorsítás 120mm/s-ra 60ms-alatt !!!
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 17, 15:33
Írta: 4mjnxdwuu Dátum 2007 június 17, 15:33
Mekkora az orsó emelkedése???? A videót holnap nézem meg, de a szövegből kiderül, szépen alakul...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 17, 15:35
Írta: bmejdz9nu Dátum 2007 június 17, 15:35
5mm... (20-as átmérő)
Ez ugye egyrészt rossz a sebsségnek, másrészt jó... az erőnek...
Ez ugye egyrészt rossz a sebsségnek, másrészt jó... az erőnek...
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 17, 15:55
Írta: 4mjnxdwuu Dátum 2007 június 17, 15:55
Csak problémázok a két gép összehasonlításán,
Mert ugye a tiéd nagyobb terhet tud megmozdítani, jobban gyorsítani, adott fordulatig, viszont az enyémnél meg nagyobb sebesség tartozik ahhoz a fodulathoz, és alacsonyabb fordulaton(hogy egyforma legyen a sebsség) meg erősebb, a motor.
Na ezt tippelje meg valaki motor karakterisztika nélkül... A barátnőm szerint olyanok vagyunk mint két ovis, az én apukámnak..., de az enyémnek...[#ijedt][#duhos2] Vagy egyszerübb lenne ha megmérnénk és akié nagyobb az győz....[#action][#nevetes1][#integet2]
Mert ugye a tiéd nagyobb terhet tud megmozdítani, jobban gyorsítani, adott fordulatig, viszont az enyémnél meg nagyobb sebesség tartozik ahhoz a fodulathoz, és alacsonyabb fordulaton(hogy egyforma legyen a sebsség) meg erősebb, a motor.
Na ezt tippelje meg valaki motor karakterisztika nélkül... A barátnőm szerint olyanok vagyunk mint két ovis, az én apukámnak..., de az enyémnek...[#ijedt][#duhos2] Vagy egyszerübb lenne ha megmérnénk és akié nagyobb az győz....[#action][#nevetes1][#integet2]
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 17, 15:57
Írta: 4mjnxdwuu Dátum 2007 június 17, 15:57
Ja, a másik irányba is mozgatod majd az asztalt, vagy a hídon megy a maró jobbra-balra?
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 17, 17:13
Írta: bmejdz9nu Dátum 2007 június 17, 17:13
A hidon fog menni kersztbe...
Cím: Re:Léptetőmotor
Írta: dg8n4i8x Dátum 2007 június 17, 21:05
Írta: dg8n4i8x Dátum 2007 június 17, 21:05
Majd a talin rendezhettek kötélhúzást meg gyorsulási versenyt a gépekkel... [#eplus2]
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 17, 21:18
Írta: bmejdz9nu Dátum 2007 június 17, 21:18
Hát igen... nincs két egyforma gép... az biztos...:) De ez benne a szép!
A sebesség fogalmát (magamban) azért "átdefiniáltam"...
Mert ha versenyt rendeznénénk (ahogy Balu írja...:) Akkor csak a végeredmény számítana...
Egy kis munkaterületű gépnél - szerintem - a gyorsítás fontosabb mint a sebesség... vagy?
A sebesség fogalmát (magamban) azért "átdefiniáltam"...
Mert ha versenyt rendeznénénk (ahogy Balu írja...:) Akkor csak a végeredmény számítana...
Egy kis munkaterületű gépnél - szerintem - a gyorsítás fontosabb mint a sebesség... vagy?
Cím: Re:Léptetőmotor
Írta: dg8n4i8x Dátum 2007 június 17, 22:11
Írta: dg8n4i8x Dátum 2007 június 17, 22:11
Hát igen! Egy 3D megmunkálásnál kicsit idegtép őha a gép mindíg csak gyorsít... Oda kell a jó gyorsulás!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 17, 22:19
Írta: bmejdz9nu Dátum 2007 június 17, 22:19
Nem csak 3D... te tudod igazán :)... pl. egy nyák marás és fúrás is hasonló problémákat vet fel...
pl. A német gépem órákig tudta csinálni... :) (15-20mms/700ms volt!)
Bárcsak mindenki (le)videózná a gépét... sokat mennénk előre... mert minden gépben van valami érdekes és jó... de nem teszik... nem értem...
pl. A német gépem órákig tudta csinálni... :) (15-20mms/700ms volt!)
Bárcsak mindenki (le)videózná a gépét... sokat mennénk előre... mert minden gépben van valami érdekes és jó... de nem teszik... nem értem...
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 június 17, 22:23
Írta: 4mjnxdwuu Dátum 2007 június 17, 22:23
3m/p-re 10ms?????[#awink]
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 17, 22:47
Írta: bmejdz9nu Dátum 2007 június 17, 22:47
mire Gondolsz?
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 17, 22:53
Írta: bmejdz9nu Dátum 2007 június 17, 22:53
Lehet hogy az új videóval egy kis baj van... #1361
A fényképezőgép 30 kocka/mp-el vesz fel... és ezt most átalakítottam 25kocka/mp-re... lehet, hogy lassult... arányaiban...de az eredetit már letöröltem... nem tudom ellenőrízni... hogy a teljes idő nem e lett hoszabb...
De az adatok oké...
A fényképezőgép 30 kocka/mp-el vesz fel... és ezt most átalakítottam 25kocka/mp-re... lehet, hogy lassult... arányaiban...de az eredetit már letöröltem... nem tudom ellenőrízni... hogy a teljes idő nem e lett hoszabb...
De az adatok oké...
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2007 június 18, 23:03
Írta: e3h0cv4ph Dátum 2007 június 18, 23:03
Sziasztok. Na végre elindult a gépem és tudtam felvételeket készíteni.
Röviden. Eszterga gép (főleg fa megmunkálásra), hosszirányban kb. 1500 mm tud elmozdulni 0,2 mm es felbontással léptetőmotorral és acélsodronyos meghajtással. A keresztirány kb. 400 mm -es elmozdulással mozgatóorsóval és léptetőmotorral 0,05mm -es felbontással. A főorsó 1,5 KW -os motorral és a Majki féle frekiváltóval, index visszajelzéssel és PWM vezérléssel (ami valami rejtélyes ok miatt nem műkszik). A léptetőket a saját tervezésű H1-2AXIS vezérlő hajtja, 35V -os tápról (amit még lehetne növelni).
A gépem nagyjából így néz ki:
(itt még nincs teljesen összerakva)

A motor és a bovdenes hajtás:

Ezen a szán is látszik és a hajtás is:

A gépet egyébként teljes egészében én építettem, heggesztettem, stb.. (hosszú évek során :) ) Mint már említettem nincs sok pénzem golyós orsókra és golyós szánokra (szerintem egy faipari gépnél szükségtelen is).
Röviden. Eszterga gép (főleg fa megmunkálásra), hosszirányban kb. 1500 mm tud elmozdulni 0,2 mm es felbontással léptetőmotorral és acélsodronyos meghajtással. A keresztirány kb. 400 mm -es elmozdulással mozgatóorsóval és léptetőmotorral 0,05mm -es felbontással. A főorsó 1,5 KW -os motorral és a Majki féle frekiváltóval, index visszajelzéssel és PWM vezérléssel (ami valami rejtélyes ok miatt nem műkszik). A léptetőket a saját tervezésű H1-2AXIS vezérlő hajtja, 35V -os tápról (amit még lehetne növelni).
A gépem nagyjából így néz ki:
(itt még nincs teljesen összerakva)
A motor és a bovdenes hajtás:
Ezen a szán is látszik és a hajtás is:
A gépet egyébként teljes egészében én építettem, heggesztettem, stb.. (hosszú évek során :) ) Mint már említettem nincs sok pénzem golyós orsókra és golyós szánokra (szerintem egy faipari gépnél szükségtelen is).
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 18, 23:12
Írta: bmejdz9nu Dátum 2007 június 18, 23:12
Ez a bovdenes hajtás érdekelne! Egy ismerősöm faipari marót akar építeni és kérdezte melyik a legporvédettebb megoldás... nekem a bovdenes jutott az eszembe!
Milyen izgi lett az a léptető motor topik...:)
Nagyon jó, hogy te is teszel fel képeket! (majd talán videót is... jó lenne... :)
Milyen izgi lett az a léptető motor topik...:)
Nagyon jó, hogy te is teszel fel képeket! (majd talán videót is... jó lenne... :)
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2007 június 18, 23:13
Írta: e3h0cv4ph Dátum 2007 június 18, 23:13
A sebesség amit sikerült vele elérni, hosszirányba érdekes, mivel megmunkálás során (pl: korlátoszlop) sokszor megy oda-vissza az 1500 mm -es távon.
A végsebesség (ami lépésvesztés nélkül még megy) 16 m/perc és a gyorsulás 1000 mm/sec2
A következő videófelvétel ezt bizonyítja:
1 méter oda-vissza.
A felvételen 1000 mm -es utat tesz meg oda-vissza. Mérésem alapján 1m -t kb 4 másodperc alatt tesz meg, gyorsulással, lassulassal.
A végsebesség (ami lépésvesztés nélkül még megy) 16 m/perc és a gyorsulás 1000 mm/sec2
A következő videófelvétel ezt bizonyítja:
1 méter oda-vissza.
A felvételen 1000 mm -es utat tesz meg oda-vissza. Mérésem alapján 1m -t kb 4 másodperc alatt tesz meg, gyorsulással, lassulassal.
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2007 június 18, 23:24
Írta: e3h0cv4ph Dátum 2007 június 18, 23:24
Aztán megcsináltam a Tibor féle "ütvefúró tesztet"
Itt 0,6 mm-t mozdul el oda-vissza (ütvefúró)
a sebesség 16 m/perc a gyorsulás 1600 mm/sec2-ig tudtam felvinni lépésvesztés nélkül. (1800-ig elmentem vele de itt már 1-1 hiba volt)
Aztán itt pedig ugyanezekkel a paraméterekkel csak 10 mm-es úton megy (jól látszik, hogy lépésvesztés nélkül) , később leterheltem 720N erővel (ráültem) akkor már egy kicsit néha hibázott.
És itt pedig munka közben látható (épp egy nagyolást csinált).
Üdv:Tatai Tamás
Itt 0,6 mm-t mozdul el oda-vissza (ütvefúró)
a sebesség 16 m/perc a gyorsulás 1600 mm/sec2-ig tudtam felvinni lépésvesztés nélkül. (1800-ig elmentem vele de itt már 1-1 hiba volt)
Aztán itt pedig ugyanezekkel a paraméterekkel csak 10 mm-es úton megy (jól látszik, hogy lépésvesztés nélkül) , később leterheltem 720N erővel (ráültem) akkor már egy kicsit néha hibázott.
És itt pedig munka közben látható (épp egy nagyolást csinált).
Üdv:Tatai Tamás
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2007 június 18, 23:38
Írta: e3h0cv4ph Dátum 2007 június 18, 23:38
Ezt a bovdenes megoldást én is úgy lestem le egy nagy faipari marógépről. Egy magyar úriember csinálja elég nagyban (ha megtalálom a képet, linkelem).
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 24, 13:11
Írta: bmejdz9nu Dátum 2007 június 24, 13:11
Megcsináltam a motorfelfogatást POM műanyaglemezből, hogy a rezonanciákat kevésbé vigye át az asztalra...
A rezonancia átvitel csökkent, de a motor most melegszik... ha 150mm-es távot 120mm/s seb. 80ms gyorsulás... 6A áram... 1 óra után 65 fokra melegszik a motor... ez eddíg szinte hideg volt... ennyit számít... nem is gondolná az ember... de szerintem üzemszerű használatban talán nem fog ennyire... vagy segédhűtőbordát kap... de a műanyag tartó marad... mert szebb a járása így...
Mitől szeret egy motor melegedni mozgásban? A hirtelen nagysebességű irányváltástól? terheléstől? sebességtől? Állandó 6A áram mellett?
A kapcsoló üzemű táp alíg melegszik... pedíg lekötöttem a hűtőventilátorját is...
A rezonancia átvitel csökkent, de a motor most melegszik... ha 150mm-es távot 120mm/s seb. 80ms gyorsulás... 6A áram... 1 óra után 65 fokra melegszik a motor... ez eddíg szinte hideg volt... ennyit számít... nem is gondolná az ember... de szerintem üzemszerű használatban talán nem fog ennyire... vagy segédhűtőbordát kap... de a műanyag tartó marad... mert szebb a járása így...
Mitől szeret egy motor melegedni mozgásban? A hirtelen nagysebességű irányváltástól? terheléstől? sebességtől? Állandó 6A áram mellett?
A kapcsoló üzemű táp alíg melegszik... pedíg lekötöttem a hűtőventilátorját is...
Cím: Re:Léptetőmotor
Írta: 3vv2btrhv Dátum 2007 június 24, 13:30
Írta: 3vv2btrhv Dátum 2007 június 24, 13:30
szia TT
nem tudom megnézni a videokat nem tölti be !!
tibor
nem tudom megnézni a videokat nem tölti be !!
tibor
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 24, 14:38
Írta: bmejdz9nu Dátum 2007 június 24, 14:38
Ha biztosra akartok menni a videókkal... és túl nagy méretűek se legyenek... akkor a legjobb választás a *.wmf azaz a Windows Media Format.
Ezt alapból támogatja minden Windows... Media player...
Ezt alapból támogatja minden Windows... Media player...
Cím: Re:Léptetőmotor
Írta: uzahitefr Dátum 2007 június 24, 21:28
Írta: uzahitefr Dátum 2007 június 24, 21:28
sziasztotok tesztelem a h1 et persze még gép nélkül érdekes hogy terhelés nélkül 3000 mm / min akadozik de ha kicsit fékezem ujal akkor felbirom húzni akár 8.4 m / min ig a moci kb 1 nm
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 25, 06:27
Írta: 000000000 Dátum 2007 június 25, 06:27
Nem túl erős gerjesztést állítottál be?
Mivel hajtod (Mach3)?
Mivel hajtod (Mach3)?
Cím: Re:Léptetőmotor
Írta: uzahitefr Dátum 2007 június 25, 21:23
Írta: uzahitefr Dátum 2007 június 25, 21:23
igen mach 3. a motor fesz 34 v terheletlenül
Cím: Re:Léptetőmotor
Írta: uzahitefr Dátum 2007 június 25, 21:30
Írta: uzahitefr Dátum 2007 június 25, 21:30
egy aprocska de fontos kérdés?! épitgetem a h1 vezérlőmet a nyák hátsó oldalán van egy jópár apró kondi, számit beforasztásnál a hejzete? mármint + - oldal jelölést nem találtam a kondin amit vásároltam
Cím: Re:Léptetőmotor
Írta: uzahitefr Dátum 2007 június 25, 21:53
Írta: uzahitefr Dátum 2007 június 25, 21:53
bár nem is férne rá jelölés!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 25, 22:50
Írta: 000000000 Dátum 2007 június 25, 22:50
Ha kerámia, akkor bipoláris, mindegy a polaritás, ha tantál, vagy elektrolit, akkor csíkkal szokták megjelölni az elektrolitnál a negatív, néhány tantálnál a pozitív sarkot...[#szomoru1][#wave]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 26, 06:32
Írta: 000000000 Dátum 2007 június 26, 06:32
Ezek a kondik (az IC-k tápszűrői) eredetileg 470nF-os, bipoláris, SMD kondik.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 26, 06:33
Írta: 000000000 Dátum 2007 június 26, 06:33
Ha a Mach3-ban az Enchanged Pulsening nem volt bekapcsolva, kapcsold be!
Cím: Re:Léptetőmotor
Írta: uzahitefr Dátum 2007 június 26, 16:31
Írta: uzahitefr Dátum 2007 június 26, 16:31
köszönöm a segitséget mindenkinek!
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2007 június 26, 18:43
Írta: e3h0cv4ph Dátum 2007 június 26, 18:43
Szia Tibor.
A videókat SONY fényképezőgéppel csináltam az vesz fel MPG -formátumban, szerintem a lejátszód nem támogatja ezt a formátumot, telepítsel valami frissítést (szerintem).
A videókat SONY fényképezőgéppel csináltam az vesz fel MPG -formátumban, szerintem a lejátszód nem támogatja ezt a formátumot, telepítsel valami frissítést (szerintem).
Cím: Re:Léptetőmotor
Írta: 3vv2btrhv Dátum 2007 június 26, 18:53
Írta: 3vv2btrhv Dátum 2007 június 26, 18:53
szia TT
ezzel jöt meg nekem a windoz ellenörzö progi , bocsi de nem telepitem .
tibor
ezzel jöt meg nekem a windoz ellenörzö progi , bocsi de nem telepitem .
tibor
Cím: Re:Léptetőmotor
Írta: Robika37 Dátum 2007 június 26, 18:58
Írta: Robika37 Dátum 2007 június 26, 18:58
Üdv !
Az Origo szoftverbázison keress rá a "mpc2kxp" programra. Az a neve: Media Player Classic, köze nincs a Microsoft-hoz mindent lejátszik, és free
Robika
Az Origo szoftverbázison keress rá a "mpc2kxp" programra. Az a neve: Media Player Classic, köze nincs a Microsoft-hoz mindent lejátszik, és free
Robika
Cím: Re:Léptetőmotor
Írta: uzahitefr Dátum 2007 június 26, 21:55
Írta: uzahitefr Dátum 2007 június 26, 21:55
hát ezek az smd alkatrészek beforrasztása elég macera! minden elismerésem magi urnak ! az ő forrasztásai sokkal szebbek!!!!
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2007 június 26, 22:49
Írta: e3h0cv4ph Dátum 2007 június 26, 22:49
Szerintem azokat nem István forrasza be, nem lenne rá ideje azt a heti 400-500 db H1-est beforrasztani. :)
Egyébként én is megküzdöttem ezzel, de ez a dolog szépsége, így jobban értékeled majd amikor majd működik, ráadásul ha javítani kell akkor könnyebben kiigazodsz rajta.
Egyébként én is megküzdöttem ezzel, de ez a dolog szépsége, így jobban értékeled majd amikor majd működik, ráadásul ha javítani kell akkor könnyebben kiigazodsz rajta.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 27, 19:11
Írta: 000000000 Dátum 2007 június 27, 19:11
Saqjnos erősen túlbecsülöd a db számot (és én is szoktam beforrasztgatni, de valóban van segítségem)!
Cím: Re:Léptetőmotor
Írta: uzahitefr Dátum 2007 június 27, 20:43
Írta: uzahitefr Dátum 2007 június 27, 20:43
sziasztok ! vettem 3 db 1.5 nm s motort 8 kivezetéseset, mely szineket kell közösitenem unpoláris kötéshez?
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 27, 21:08
Írta: bmejdz9nu Dátum 2007 június 27, 21:08
Hány kilós?
Cím: Re:Léptetőmotor
Írta: uzahitefr Dátum 2007 június 27, 22:03
Írta: uzahitefr Dátum 2007 június 27, 22:03
köszi 1.5 nm és kb1.5 -2 kg
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 június 28, 06:53
Írta: 000000000 Dátum 2007 június 28, 06:53
A supportot akkor a megfelelő helyen kérjétek (nem itt)![#ejnye1]
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 június 29, 09:47
Írta: bmejdz9nu Dátum 2007 június 29, 09:47
Kerek számú encoder vagy microstep...
Tegnapi tesztek szerint arra jutottam néha jó lehet ha az osztási érték kerek...
(pl. 1000-es microstep... 500cpr-es encoder... stb.)
Mert képtelenség másként úgy beállítani, a rendsztert, hogy 0.01mm-es léptetésre 0.01mm-t léptessen...
Jó tudom, hogy más szitúban más...kitárgyaltuk...
Tudom azt is ennek csak akkor van jelentősége, ha a golyósorsó abszolút tökéletes (hát ez sem mindíg...) és a az egész gép és a marómotor(!) is tudja ezt... ez ritkán van mind egybe... de hátha összejön... és a leendő munkadarab is "metrikus"...
Persze tudom ez már "sznobizás" ... :)
Tegnapi tesztek szerint arra jutottam néha jó lehet ha az osztási érték kerek...
(pl. 1000-es microstep... 500cpr-es encoder... stb.)
Mert képtelenség másként úgy beállítani, a rendsztert, hogy 0.01mm-es léptetésre 0.01mm-t léptessen...
Jó tudom, hogy más szitúban más...kitárgyaltuk...
Tudom azt is ennek csak akkor van jelentősége, ha a golyósorsó abszolút tökéletes (hát ez sem mindíg...) és a az egész gép és a marómotor(!) is tudja ezt... ez ritkán van mind egybe... de hátha összejön... és a leendő munkadarab is "metrikus"...
Persze tudom ez már "sznobizás" ... :)
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 október 09, 08:51
Írta: bmejdz9nu Dátum 2007 október 09, 08:51
Hogyan lehetséges az, hogy a léptetőmotort egy bizonyos (kisebb) sebességre azonnal (zero idő alatt?) fel lehet gyorsítani...
Tudom..erről már volt szó... de az elméletet nem értem...
Tudom..erről már volt szó... de az elméletet nem értem...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 október 09, 10:13
Írta: 000000000 Dátum 2007 október 09, 10:13
Nem lehet semmilyen motort lemaradás nélkül
gyorsítani (ugyanis tömege és átmérője van,
így tehetetlenségi nyomatéka is), azaz a
léptető motor is állandó késésben van. Akkor
van baj, amikor a sinus-cosinus függvényű
váltakozó mágneses tér és a rotor
mégneses mezői között 180 foknál nagyobb a
lemaradás. Ilyenkor kieseik a szinkronból,
nulla közeli nyomatékot ad le, és teljesen
bizonytalan a beállása. Ez a határ start-stop
frekvencia, amit a gyártó közöl a motorjáról.
Ha nincs ilyen adat, ki lehet mérni egységugrás
tesztekkel a motorra külön, és beépítve az
egész gépre is.
gyorsítani (ugyanis tömege és átmérője van,
így tehetetlenségi nyomatéka is), azaz a
léptető motor is állandó késésben van. Akkor
van baj, amikor a sinus-cosinus függvényű
váltakozó mágneses tér és a rotor
mégneses mezői között 180 foknál nagyobb a
lemaradás. Ilyenkor kieseik a szinkronból,
nulla közeli nyomatékot ad le, és teljesen
bizonytalan a beállása. Ez a határ start-stop
frekvencia, amit a gyártó közöl a motorjáról.
Ha nincs ilyen adat, ki lehet mérni egységugrás
tesztekkel a motorra külön, és beépítve az
egész gépre is.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 október 09, 11:15
Írta: bmejdz9nu Dátum 2007 október 09, 11:15
OK. értem, de meg nem tudom érteni... [#vigyor2]
Tehát kis fordulatig a léptetőmotor egy "eszményi" szerkezet?
Ezekre a mérésekre nagyon jó az egységugrás teszt...
Tehát kis fordulatig a léptetőmotor egy "eszményi" szerkezet?
Ezekre a mérésekre nagyon jó az egységugrás teszt...
Cím: Re:Léptetőmotor
Írta: 7vpav5d32 Dátum 2007 október 09, 11:23
Írta: 7vpav5d32 Dátum 2007 október 09, 11:23
hali
a zéró gyorsulásra csak a barátom lovai képesek a földön. 0-rol 50-re köztes állapot nincs. [#eplus2]
a zéró gyorsulásra csak a barátom lovai képesek a földön. 0-rol 50-re köztes állapot nincs. [#eplus2]
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 október 09, 11:44
Írta: bmejdz9nu Dátum 2007 október 09, 11:44
Hát biztos nem zero teljesen... de egy kisebb frekit ráküldve... ha jól gondolom... azonnal(?) lépegetni kezd...
Sleep-je lehet az első lépésben... gondolom... de megy ez a dolog...
Ez egy nagyon érdekes téma... mert ha így van... márpedig ez valóság... a kis mozgásoknál ez nagy idő megtakarítás! (pl. 3D marásnál...)
Sleep-je lehet az első lépésben... gondolom... de megy ez a dolog...
Ez egy nagyon érdekes téma... mert ha így van... márpedig ez valóság... a kis mozgásoknál ez nagy idő megtakarítás! (pl. 3D marásnál...)
Cím: Re:Léptetőmotor
Írta: 7vpav5d32 Dátum 2007 október 09, 11:50
Írta: 7vpav5d32 Dátum 2007 október 09, 11:50
mondjuk inkább, hogy számunkra nem mérhető időn belül kezd lépegetni, de az idő azért ott van ha netán nincs akkor gyorsan védesd le a teknikádat mert az nagyobb dolog mint a rubik kocka. [#nevetes1]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 október 09, 13:42
Írta: 000000000 Dátum 2007 október 09, 13:42
Péter! Van itt egy nagy bökkenő!
Ahogyan a DC motor is, a léptető motor is
rendelkezik tekerccsel, így van induktivitása.
Tehát ha utána számolsz (T=L/R) a legjobb
stepperek is néhány ms villamos időállandóval
jellemzhetők. Azaz ha egységugrás jelet kap,
az áram is jelentősen késik, ehhez még hozzáadódik a mechanikai időállandó, és épp elég lesz neki még azt a pici 1.8 fokot is megugrania, nem hogy pl. mondjuk 90 fokot.
No ez a halála a léptetőmotornak, csak nagyon
óvatosan azokkal az egységugrásokkal. Így aztán
az sem igaz, hogy 3D-nél nagyon tudnál vele
fickándozni, hacsak nem 1.8-fokon belül, azaz
1 inkrementumon belül történik minden.:)
Ahogyan a DC motor is, a léptető motor is
rendelkezik tekerccsel, így van induktivitása.
Tehát ha utána számolsz (T=L/R) a legjobb
stepperek is néhány ms villamos időállandóval
jellemzhetők. Azaz ha egységugrás jelet kap,
az áram is jelentősen késik, ehhez még hozzáadódik a mechanikai időállandó, és épp elég lesz neki még azt a pici 1.8 fokot is megugrania, nem hogy pl. mondjuk 90 fokot.
No ez a halála a léptetőmotornak, csak nagyon
óvatosan azokkal az egységugrásokkal. Így aztán
az sem igaz, hogy 3D-nél nagyon tudnál vele
fickándozni, hacsak nem 1.8-fokon belül, azaz
1 inkrementumon belül történik minden.:)
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 október 09, 15:34
Írta: bmejdz9nu Dátum 2007 október 09, 15:34
Tudod miért érdekel...
A WinPC-NC-ben lehet állítani azt a sebességhatárt (start-stop) amíg a gyorsítási beállítást nem veszi figyelembe... (without ramp)
Csak egyszerűen elképzelhetetlennek tartom a dolgot... (de tudjuk, hogy van...)
Próbáltam, de csak szervóval, de ott tiszta hüléség mert addíg ok. míg a hibajel tároló meg nem telik... de a léptetőnek nincs tárolőja...
A WinPC-NC-ben a motorteszt ablakban van az egységugratási tesztmodul(!). írják, hogy teszteld ki a végét és csökkentsd utánna 30%-ot...
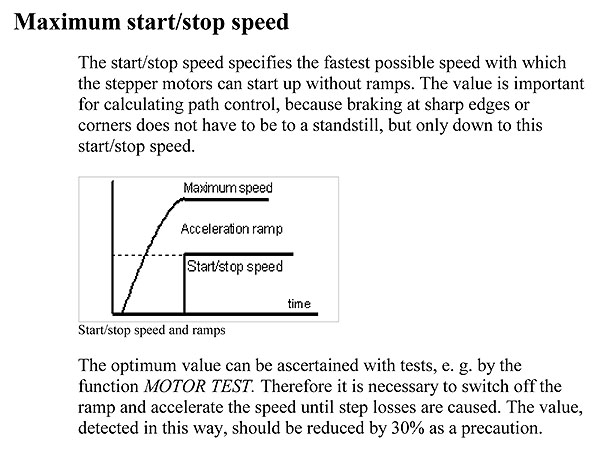
A WinPC-NC-ben lehet állítani azt a sebességhatárt (start-stop) amíg a gyorsítási beállítást nem veszi figyelembe... (without ramp)
Csak egyszerűen elképzelhetetlennek tartom a dolgot... (de tudjuk, hogy van...)
Próbáltam, de csak szervóval, de ott tiszta hüléség mert addíg ok. míg a hibajel tároló meg nem telik... de a léptetőnek nincs tárolőja...
A WinPC-NC-ben a motorteszt ablakban van az egységugratási tesztmodul(!). írják, hogy teszteld ki a végét és csökkentsd utánna 30%-ot...
Cím: Re:Léptetőmotor
Írta: 2vkx6unz Dátum 2007 október 17, 10:24
Írta: 2vkx6unz Dátum 2007 október 17, 10:24
Sziasztok!
Lehet, hogy abszrd dolgot kérdezek, de létezik- e külső forgórészes léptető vagy szervo motor? Olyanra gondolok mint a külső forgórészes BL motor. Esetleg kialakítható-e a BL motorból AC servo?
Lehet, hogy abszrd dolgot kérdezek, de létezik- e külső forgórészes léptető vagy szervo motor? Olyanra gondolok mint a külső forgórészes BL motor. Esetleg kialakítható-e a BL motorból AC servo?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 október 17, 12:01
Írta: 000000000 Dátum 2007 október 17, 12:01
Szia!
A szervo az egy minőségi jelző a motorokra
vonatkozóan. Nagyjából annyit takar, olyan
műszaki paraméterekkel tervezték a motort,
hogy minőségi szabályzásra alkalmas legyen.
Így alapvetően manapság 3 fő szervomotor kategória
létezik: DC kefés, BLDC, AC indukciós (az utóbbi
kettő egynek is vehető). A külső forgórészes
motoroknak nagyobb a tehetetlenségi nyomatékuk,
ezért nem igazán szervo kategóriák, és nem zárt
a konstrukció, baleset veszélyesebbek,
szennyeződésre igen érzékenyek.
A szervo az egy minőségi jelző a motorokra
vonatkozóan. Nagyjából annyit takar, olyan
műszaki paraméterekkel tervezték a motort,
hogy minőségi szabályzásra alkalmas legyen.
Így alapvetően manapság 3 fő szervomotor kategória
létezik: DC kefés, BLDC, AC indukciós (az utóbbi
kettő egynek is vehető). A külső forgórészes
motoroknak nagyobb a tehetetlenségi nyomatékuk,
ezért nem igazán szervo kategóriák, és nem zárt
a konstrukció, baleset veszélyesebbek,
szennyeződésre igen érzékenyek.
Cím: Re:Léptetőmotor
Írta: 2vkx6unz Dátum 2007 október 17, 13:27
Írta: 2vkx6unz Dátum 2007 október 17, 13:27
Köszönöm a választ.
Egy másik kérdés. A talin mutattál lapos motorokat. Ki gyárt ilyet, illetve miből lehetne ilyen motort kitermelni?
Egy másik kérdés. A talin mutattál lapos motorokat. Ki gyárt ilyet, illetve miből lehetne ilyen motort kitermelni?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 október 17, 15:00
Írta: 000000000 Dátum 2007 október 17, 15:00
Azokat a tárcsamotorokat motorokat pl.
a Hitachi gyártotta, valamilyen fénymásolóban
voltak.
a Hitachi gyártotta, valamilyen fénymásolóban
voltak.
Cím: Re:Léptetőmotor
Írta: Szedlay Pál Dátum 2007 október 29, 14:52
Írta: Szedlay Pál Dátum 2007 október 29, 14:52
Ide tettem egy tesztet a léptető motoros rendszer pontosságáról ha valakit érdekel
Videó
linearis encoderrel mért pontatlanság
Videó
linearis encoderrel mért pontatlanság
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 október 29, 15:04
Írta: bmejdz9nu Dátum 2007 október 29, 15:04
Ha géphez érsz a kamerával mindíg megszakad a videó... :)
De ez már profi volt...
Hol a mérő encoder a hajtásban?
De ez már profi volt...
Hol a mérő encoder a hajtásban?
Cím: Re:Léptetőmotor
Írta: Szedlay Pál Dátum 2007 október 29, 15:07
Írta: Szedlay Pál Dátum 2007 október 29, 15:07
Péter!
A hajtásban a motoron nincs.
Az x,y,z tengely oldalára van felszerelve az az aluminium színű.
A hajtásban a motoron nincs.
Az x,y,z tengely oldalára van felszerelve az az aluminium színű.
Cím: Re:Léptetőmotor
Írta: Szedlay Pál Dátum 2007 október 29, 15:10
Írta: Szedlay Pál Dátum 2007 október 29, 15:10
PéterI
És a léptecsem pontosságához egy pozitív szavad sincs[#taps]
És a léptecsem pontosságához egy pozitív szavad sincs[#taps]
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 október 29, 15:35
Írta: bmejdz9nu Dátum 2007 október 29, 15:35
Nekem sohe semmi bajom és lépesvesztésem nem volt a léptetős gépemmel... így nem csodálkozok...
Hogyis hibázhatna egy léptetőmotor?
De encoderrel mérve a pontoság csak egy dolog... mit várnál? ellépi magát? Nem szokta... Csak ha a határértékeket túlléped...
A mechanikával együtt kellene mérni, orsó anyával és a mechanika "minden" bajával*... terhelve...
*Tökéletes mechanika nincs.
A gépedről tehetnél fel képeket és videót... mert igen jól néz ki!
Hogyis hibázhatna egy léptetőmotor?
De encoderrel mérve a pontoság csak egy dolog... mit várnál? ellépi magát? Nem szokta... Csak ha a határértékeket túlléped...
A mechanikával együtt kellene mérni, orsó anyával és a mechanika "minden" bajával*... terhelve...
*Tökéletes mechanika nincs.
A gépedről tehetnél fel képeket és videót... mert igen jól néz ki!
Cím: Re:Léptetőmotor
Írta: Szedlay Pál Dátum 2007 október 29, 15:42
Írta: Szedlay Pál Dátum 2007 október 29, 15:42
Péter!
Bocsi de nem értem.
Amit a videón látsz az az össz hiba, mert a mehanika oldalára van felszerelve az útjelző.
Tehát ebbe benne van az összes hiba együttesen kezdve a csapágytól a golyóorsó hibáig minden.
Összesen 15Kg-ot rángat. Mindenhol a lineáris egységet ideszerelik, ezért méri a valós megtett út hosszát a hibákkal együtt.
Bocsi de nem értem.
Amit a videón látsz az az össz hiba, mert a mehanika oldalára van felszerelve az útjelző.
Tehát ebbe benne van az összes hiba együttesen kezdve a csapágytól a golyóorsó hibáig minden.
Összesen 15Kg-ot rángat. Mindenhol a lineáris egységet ideszerelik, ezért méri a valós megtett út hosszát a hibákkal együtt.
Cím: Re:Léptetőmotor
Írta: Szedlay Pál Dátum 2007 október 29, 15:46
Írta: Szedlay Pál Dátum 2007 október 29, 15:46
A gépem majd csak a jövő hónapban lesz kész mert ez is lassan készül mint a Tied. Ez 700Kg lesz, mert én félek a deformitásoktól. Ha készen van közzéteszem, remélem büszke leszek rá
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 október 29, 16:06
Írta: bmejdz9nu Dátum 2007 október 29, 16:06
Na akkor már nem értem... videót, képeket materiális típus vagyok... :)
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 október 29, 16:11
Írta: bmejdz9nu Dátum 2007 október 29, 16:11
Mi az, hogy kész gép? Van olyan? addíg titkolod...?
700Kg... ez sem egy kategória az enyémmel... az már nem TaliCompatible(R)...
Láttam rajt a HF motort... stb... szerintem jobb ha elkezdenéd... had lássuk? Tudom a festés... ezt szokták mondani...
Mekkora? Mihez szánod? stb.... :)
700Kg... ez sem egy kategória az enyémmel... az már nem TaliCompatible(R)...
Láttam rajt a HF motort... stb... szerintem jobb ha elkezdenéd... had lássuk? Tudom a festés... ezt szokták mondani...
Mekkora? Mihez szánod? stb.... :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 október 31, 23:31
Írta: 000000000 Dátum 2007 október 31, 23:31
Sziasztok!
Mi lenne ha egy 6 kivezetéses, eredetilek kizárólagosan unipoláris motort szétszednék és a közös vezetékeket szétbontanám azért, hogy 8 vezetéket kapjak. Végsősoron az a célom, hogy 2-2 tekercs lepárhuzamosításával bipoláris módban a lehető legnagyobb áramot ill- azon keresztül a legnagyobb nyomatékot realizáljam. Csinált-e valaki közületek ilyen beavatkozást ill. mire számitsak ha a motoromat szétberhelem?
Mi lenne ha egy 6 kivezetéses, eredetilek kizárólagosan unipoláris motort szétszednék és a közös vezetékeket szétbontanám azért, hogy 8 vezetéket kapjak. Végsősoron az a célom, hogy 2-2 tekercs lepárhuzamosításával bipoláris módban a lehető legnagyobb áramot ill- azon keresztül a legnagyobb nyomatékot realizáljam. Csinált-e valaki közületek ilyen beavatkozást ill. mire számitsak ha a motoromat szétberhelem?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 november 01, 08:09
Írta: 000000000 Dátum 2007 november 01, 08:09
Az elv jó, csak a mágnesre is vigyázz (tudod, lemágneseződés veszély)!
NDK-st már szedtem szét (régen kint volt a belseje a weblapon):
nem egy közös helyen van eggyesítve, hanem csoportonként és egy kis nyákra volt kiforrasztva. Ott az viszonylag könnyebben visszafejthető lenne, de a Jappán mocikon ez a tekercsben van bebandázsolva (az már gázos)!
NDK-st már szedtem szét (régen kint volt a belseje a weblapon):
nem egy közös helyen van eggyesítve, hanem csoportonként és egy kis nyákra volt kiforrasztva. Ott az viszonylag könnyebben visszafejthető lenne, de a Jappán mocikon ez a tekercsben van bebandázsolva (az már gázos)!
Cím: Re:Léptetőmotor
Írta: Karácsony Sándor Dátum 2007 november 01, 10:07
Írta: Karácsony Sándor Dátum 2007 november 01, 10:07
Nem értem miért veszít a mágnes az erejéből?Persze biztos így van ,de a mágnes mindig "küzd " egy másikkal ,elektro- vagy permanenssel.Üzemi állapot nem árt neki?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 november 03, 20:01
Írta: 000000000 Dátum 2007 november 03, 20:01
Az az igazság az, hogy nem tudom terhelhetek-e áramilag pluszban egy eredetileg unipoláris mocit. Lehet, hogy a motor mágneses kialakítása nem teszi lehetővé az áramduplázást ill. hiába fűtöm a motort tovább nem jön ki több kakaó belőle. Trafóknál ui. már többször jártam így.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 november 04, 08:33
Írta: 000000000 Dátum 2007 november 04, 08:33
A meglátásod teljesen jó! Ha azt veszem alapúl, hogy egy eredeti 8 kivezetéses mocinál milyen párhuzamos áramokat adnak meg a tekercsáramhoz viszonyítva, akkor nem megfelelő a sima 2×-ezés! Valószínűleg ha simán duplázzuk akkor a vas már telitésbe megy és csak fűtünk a nyomaték már nem emelhető tovább.
Ez szerintem motor függő (pl. amik nálam vannak ott kb. 50%-al emelik az áramot).
Ez szerintem motor függő (pl. amik nálam vannak ott kb. 50%-al emelik az áramot).
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 november 04, 08:42
Írta: 000000000 Dátum 2007 november 04, 08:42
Még egy fontos dolog! A túlgerjesztett léptetőmotor hajlamos pozíció tévesztésre is (a túlgerjesztés miatt a vasból oldalirányba is kilépő erővonalak miatt)!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 november 04, 09:00
Írta: 000000000 Dátum 2007 november 04, 09:00
Megkerestem az NDK-s mocik belső képeit! Ime:

.jpg)
.jpg)
Cím: Re:Léptetőmotor
Írta: ebalint Dátum 2007 november 04, 10:36
Írta: ebalint Dátum 2007 november 04, 10:36
T. fórumtársak!
Milyen motor lehet ez :

Köszönettel, ebalint
Milyen motor lehet ez :
Köszönettel, ebalint
Cím: Re:Léptetőmotor
Írta: 7vpav5d32 Dátum 2007 november 04, 10:50
Írta: 7vpav5d32 Dátum 2007 november 04, 10:50
az tuti, hogy sok pixeles [#nevetes1]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 november 04, 10:56
Írta: 000000000 Dátum 2007 november 04, 10:56
BLDC motor.
Cím: Re:Léptetőmotor
Írta: ebalint Dátum 2007 november 04, 15:55
Írta: ebalint Dátum 2007 november 04, 15:55
Köszi Tibor!
3 fázisú léptetőként ajánlották, de nem igazán akartam elhinni.
Sajnos eddig én is csak fényképen láttam.
Üdv, ebalint
3 fázisú léptetőként ajánlották, de nem igazán akartam elhinni.
Sajnos eddig én is csak fényképen láttam.
Üdv, ebalint
Cím: Re:Léptetőmotor
Írta: Karácsony Sándor Dátum 2007 november 04, 18:56
Írta: Karácsony Sándor Dátum 2007 november 04, 18:56
A winchester motor is így néz ki. nincs viszonyítási méret a fotón.
Cím: Re:Léptetőmotor
Írta: robroy007 Dátum 2007 november 20, 21:28
Írta: robroy007 Dátum 2007 november 20, 21:28
Mi a véleményetek ezekről?
léptető2
léptető1
Érdekelnek, vagy ha tudtok nagyobbat jobb áron akor szóljatok
Üdv Robi
léptető2
léptető1
Érdekelnek, vagy ha tudtok nagyobbat jobb áron akor szóljatok
Üdv Robi
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 november 20, 22:25
Írta: bmejdz9nu Dátum 2007 november 20, 22:25
1. Icipici kínai motorok... 5 kivezetéssel...se adatok semmi...
2. 3,9V... kicsit magas a feszültsége... régi darab lehet... 1,35A.... ereős meg nem... de ez már legalább árában van... :) szerintem. (1600 Ft a három)
Mihez akarod?
2. 3,9V... kicsit magas a feszültsége... régi darab lehet... 1,35A.... ereős meg nem... de ez már legalább árában van... :) szerintem. (1600 Ft a három)
Mihez akarod?
Cím: Re:Léptetőmotor
Írta: robroy007 Dátum 2007 november 20, 23:20
Írta: robroy007 Dátum 2007 november 20, 23:20
a 2.-at 14eFt-ért tették ki igazából
A4 méretű dekoros gravírozót szeretnék első körben (tapasztalat gyűjtés iagzából)
most barkácsolom a scenneres mechanikámat az lessz a -1.0 verzió, meglepődve tapasztaltam, hogy csak 1db tengelyen mozgatja a fejet
mondjuk csak a gördülési ellenállást kell leküzdenie a szerkezetnek
tudsz valamilyen motort esetleg?
A4 méretű dekoros gravírozót szeretnék első körben (tapasztalat gyűjtés iagzából)
most barkácsolom a scenneres mechanikámat az lessz a -1.0 verzió, meglepődve tapasztaltam, hogy csak 1db tengelyen mozgatja a fejet
mondjuk csak a gördülési ellenállást kell leküzdenie a szerkezetnek
tudsz valamilyen motort esetleg?
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 november 21, 05:56
Írta: 4mjnxdwuu Dátum 2007 november 21, 05:56
Hali, az 1-ből nekem volt gépem, elég jó moci...
most is van ha jól emlékszem ( a többi 20 között.., ) / vagy a párja, kicsit más adatok, de kb ugyan az.. / talan az 1,14A / bár már átszoktam a Nema 34-re, azok kicsit nagyobbak... ezek 23-ok)
most is van ha jól emlékszem ( a többi 20 között.., ) / vagy a párja, kicsit más adatok, de kb ugyan az.. / talan az 1,14A / bár már átszoktam a Nema 34-re, azok kicsit nagyobbak... ezek 23-ok)
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2007 november 21, 05:59
Írta: 4mjnxdwuu Dátum 2007 november 21, 05:59
a léptető 2-t nem ajánlom magas a fesze ahhoz hogy gyorsan pörögjön...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 december 04, 21:51
Írta: 000000000 Dátum 2007 december 04, 21:51
Hello!
Tudna valaki segíteni, most vettem új motorokat a Klaviónál 23SH065-028-8W-F8-2.1 profi 1-es vezérlőm van. Beállítási értékek érdekelnének mert valahogy nem akar ősszejönni a dolog. A régi 0,7Nm-es motorjaim szépen működtek de ezek valahogy nem jól muzsikálnak. előre is köszonöm:
Tudna valaki segíteni, most vettem új motorokat a Klaviónál 23SH065-028-8W-F8-2.1 profi 1-es vezérlőm van. Beállítási értékek érdekelnének mert valahogy nem akar ősszejönni a dolog. A régi 0,7Nm-es motorjaim szépen működtek de ezek valahogy nem jól muzsikálnak. előre is köszonöm:
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 december 04, 22:19
Írta: bmejdz9nu Dátum 2007 december 04, 22:19
Ebből 5x6db van liciten... azaz 30 db egyszerre..... 17 Euroért elküldi Mo-ra... PayPalt is elfogad...szerinem jól fog végződni... a vevőknek...
(többeszám... mert 5x van a tétel ! Multi auction)
Vettem már tőle ... Normális az eladó...
Ezt hibás listázási mód... :) 1. Sok "csomag van" 2. Hat darab/csomag... (3 db-ot majd passzolsz :)

(többeszám... mert 5x van a tétel ! Multi auction)
Vettem már tőle ... Normális az eladó...
Ezt hibás listázási mód... :) 1. Sok "csomag van" 2. Hat darab/csomag... (3 db-ot majd passzolsz :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 december 04, 22:47
Írta: 000000000 Dátum 2007 december 04, 22:47
Nem tudok e-bay -ozni! 4 drb jól jonne. Természetesen a szállítási koltséggel... Elmegyek érte Mo-ra és a megrendelés elott átutalom a gubát...[#wave]
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 december 04, 23:42
Írta: bmejdz9nu Dátum 2007 december 04, 23:42
Nincs intreneted? :) Ha jól tudom PayPal-od már van...
Itt a kényszer! ... regisztráció... :) Én (már) "Bérlicitálást" nem vállalok ... [#hehe]
::::: Eljössz hozzám? ... Na azért meggondolandó...
Itt a kényszer! ... regisztráció... :) Én (már) "Bérlicitálást" nem vállalok ... [#hehe]
::::: Eljössz hozzám? ... Na azért meggondolandó...
Cím: Re:Léptetőmotor
Írta: robroy007 Dátum 2007 december 05, 00:10
Írta: robroy007 Dátum 2007 december 05, 00:10
Szia Péter!
kár, hogy bérbe nem licitálsz engem is jobban érdekelne belőle 3db
de én sem vagyok ebay tag, ráadásul még a nyelvet sem töröm annyira, hogy mindent értsek
de ha licitálsz meghálálom neked
kár, hogy bérbe nem licitálsz engem is jobban érdekelne belőle 3db
de én sem vagyok ebay tag, ráadásul még a nyelvet sem töröm annyira, hogy mindent értsek
de ha licitálsz meghálálom neked
Cím: Re:Léptetőmotor
Írta: robroy007 Dátum 2007 december 05, 00:12
Írta: robroy007 Dátum 2007 december 05, 00:12
az ár db-ra vagy csomagra vonatkozik?
mondjuk db is jó egyenlőre
mondjuk db is jó egyenlőre
Cím: Re:Léptetőmotor
Írta: robroy007 Dátum 2007 december 05, 00:21
Írta: robroy007 Dátum 2007 december 05, 00:21
remélem jól értelmezted a kiírást
mert 3 garnitúrára licitáltam lehet mai 18 mocit jelent
mert 3 garnitúrára licitáltam lehet mai 18 mocit jelent
Cím: Re:Léptetőmotor
Írta: j3rx6bsjd Dátum 2007 december 05, 07:18
Írta: j3rx6bsjd Dátum 2007 december 05, 07:18
Péter!
Miért nem veszed meg?Aztán eladod a fórumtársaknak!?Nem először csinálnád,csak ne rakj rá túl sokat:)Jól járna mindenki.
Miért nem veszed meg?Aztán eladod a fórumtársaknak!?Nem először csinálnád,csak ne rakj rá túl sokat:)Jól járna mindenki.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 december 05, 08:45
Írta: 000000000 Dátum 2007 december 05, 08:45
PayPal-om már van, regisztrálva is vagyok... Kb. egy hónapja kuldték el a regisztrációt, akkor simán beléptem. Most meg az istenkének sem akar beengedni...[#falbav]
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 december 05, 08:56
Írta: bmejdz9nu Dátum 2007 december 05, 08:56
Csomag = 6 db. XXEuro +17 Euro szállítás.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 december 05, 09:05
Írta: bmejdz9nu Dátum 2007 december 05, 09:05
Ez nem így megy nálam... valamit csak azért is megveszek, hogy lássam... :)
Vagy többet veszek mint a kellete... :) De, hogy legyen nektek... az igazából nem szokott működni...
Most pl. vettem pl. 12 db frekiváltót... (kicsit)
... kiváncsi leszek... persze ha nem kell majd a kutyának sem .... az sem baj... tehát így "tervezek" (azaz nem tervezek) vásárlásokat....
Csak egy csomo macera... megjön.. és megint csomagolás... stb... ez nem "buli" nekem... mert sosem lesz gépem... :)
Vagy többet veszek mint a kellete... :) De, hogy legyen nektek... az igazából nem szokott működni...
Most pl. vettem pl. 12 db frekiváltót... (kicsit)
... kiváncsi leszek... persze ha nem kell majd a kutyának sem .... az sem baj... tehát így "tervezek" (azaz nem tervezek) vásárlásokat....
Csak egy csomo macera... megjön.. és megint csomagolás... stb... ez nem "buli" nekem... mert sosem lesz gépem... :)
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 december 05, 09:08
Írta: bmejdz9nu Dátum 2007 december 05, 09:08
Küld át megint a jelszavadat és gatyába rázom ... [#vigyor2] Ritkán használod... :)
Cím: Re:Léptetőmotor
Írta: j3rx6bsjd Dátum 2007 december 05, 09:31
Írta: j3rx6bsjd Dátum 2007 december 05, 09:31
De másnak tudnál segíteni,az nem vígasztal?
Kezdőknek ingoványos az ebay.Én is megcsúsztam rajta.Te meg már vérbeli profi vagy:)
Régebben azért nem sajnáltad ennyire az időt.Öregszel?
Kezdőknek ingoványos az ebay.Én is megcsúsztam rajta.Te meg már vérbeli profi vagy:)
Régebben azért nem sajnáltad ennyire az időt.Öregszel?
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 december 05, 09:47
Írta: bmejdz9nu Dátum 2007 december 05, 09:47
Egyszer megtanítok mindenkit :)
De ha egész nap "keverek" akkor gépem nem lesz...
Bizony el lehet csúszni... gyakorlat kell akkor ok. most már kb. 250 pontom van vételben és a másik nevemen 215 eladásban... :)
Tehát mindkét felét ismerem... :) Ezt fel lehet használni... hogyha veszek.. tudom mint eladó milyen a másik felén... :) ... és fordítva... így aztán nehezzen húznak csőbe :) Sok poz. ponttal "erőből" is lehet tárgyalni ha kell... mert egy negatív piros nem dönt le... ezt tudják...
De ha egész nap "keverek" akkor gépem nem lesz...
Bizony el lehet csúszni... gyakorlat kell akkor ok. most már kb. 250 pontom van vételben és a másik nevemen 215 eladásban... :)
Tehát mindkét felét ismerem... :) Ezt fel lehet használni... hogyha veszek.. tudom mint eladó milyen a másik felén... :) ... és fordítva... így aztán nehezzen húznak csőbe :) Sok poz. ponttal "erőből" is lehet tárgyalni ha kell... mert egy negatív piros nem dönt le... ezt tudják...
Cím: Re:Léptetőmotor
Írta: x4rhew5r3 Dátum 2007 december 05, 11:13
Írta: x4rhew5r3 Dátum 2007 december 05, 11:13
Péter, egy frekiváltót szívesen átvennék...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 december 05, 12:00
Írta: bmejdz9nu Dátum 2007 december 05, 12:00
még azt sem tudod milyen ... mennyi ... [#vigyor]
Cím: Re:Léptetőmotor
Írta: x4rhew5r3 Dátum 2007 december 05, 12:14
Írta: x4rhew5r3 Dátum 2007 december 05, 12:14
mindegy milyen, ha jól emlékszem, valami kicsike? ...privat mail...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 december 05, 13:10
Írta: bmejdz9nu Dátum 2007 december 05, 13:10
Ha megjön lessz elég (talán)... végár 10 vagy 12 ezer lesz... tudjátok mitől függ :) de egyenlőre itt és most mindegy. :)
Cím: Re:Léptetőmotor
Írta: vthgizrff Dátum 2007 december 05, 15:30
Írta: vthgizrff Dátum 2007 december 05, 15:30
Akkor már meg is van a következő tali előadója, és az előadás témája.. [#beka2]
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2007 december 05, 16:26
Írta: Kristály Árpád Dátum 2007 december 05, 16:26
Hallihó Péter!
És mindenki......
A következő talinak már van egy biztos pontja!!!
Ezt vissza sem utasíthatod.....úgyhogy készülj!!!!
ELŐRE is KÖSZÖNJÜK!!!
És mindenki......
A következő talinak már van egy biztos pontja!!!
Ezt vissza sem utasíthatod.....úgyhogy készülj!!!!
ELŐRE is KÖSZÖNJÜK!!!
Cím: Re:Léptetőmotor
Írta: HJózsi Dátum 2007 december 05, 16:56
Írta: HJózsi Dátum 2007 december 05, 16:56
Dr eBay ...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 december 05, 17:53
Írta: bmejdz9nu Dátum 2007 december 05, 17:53
Zártkörű lesz az előadás... [#smile] Fizetős? :) Nem...Nem... aki segítetett csak annak lesz... [#wink]
Mert megírták itt többen a "tudás érték"... Én persze a csapatjátékban jobban bíznék... ugyebár minek mindenkinek mindent feltalálnia... :)
De ezt már oly sokszor leírtam...
Mert megírták itt többen a "tudás érték"... Én persze a csapatjátékban jobban bíznék... ugyebár minek mindenkinek mindent feltalálnia... :)
De ezt már oly sokszor leírtam...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 december 05, 17:55
Írta: bmejdz9nu Dátum 2007 december 05, 17:55
Szerintem... neked már mutattam újat... :) ami meghozta neked már az árát :) :) :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 december 05, 18:01
Írta: 000000000 Dátum 2007 december 05, 18:01
Üdv az uraknak!Érdeklődnék,h nincs-e valakinek feles MInebea 23 LMC- ....... típusból,amitől megszabadulna.Főleg 1,8' szögelfordulású érdekel és ha esetleg van valakinek 3,6V,1,4A /tekercs,akkor az lenne ám a kánaáán...
CSAK ez a típus érdekel!Köszönöm előre is!
CSAK ez a típus érdekel!Köszönöm előre is!
Cím: Re:Léptetőmotor
Írta: HJózsi Dátum 2007 december 05, 18:03
Írta: HJózsi Dátum 2007 december 05, 18:03
Ja, én szívesen veszem mások tapasztalatát, nem akarok mindenáron a saját káromon tanulni ... [#vigyor2]
Cím: Re:Léptetőmotor
Írta: HJózsi Dátum 2007 december 05, 18:04
Írta: HJózsi Dátum 2007 december 05, 18:04
Még így is néha azon kell ...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 december 05, 18:40
Írta: bmejdz9nu Dátum 2007 december 05, 18:40
Na én is így vagyok CNC ügyben...
Cím: Re:Léptetőmotor
Írta: robroy007 Dátum 2007 december 05, 21:50
Írta: robroy007 Dátum 2007 december 05, 21:50
rákaptak a mocikra az ebay-on
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2007 december 05, 22:08
Írta: juh0557j0 Dátum 2007 december 05, 22:08
Na tessék, ennyi motor egy embernél. Amikor nekem kellett ( és vettem 6db-ot 51GBP-ért), 35 GBP volt a szállítás. Igaz azok újak voltak és még úgy is megérte. Kíváncsi leszek, hogy mennyire verik fel az árat.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 december 05, 22:57
Írta: bmejdz9nu Dátum 2007 december 05, 22:57
Van kezdő (nullás :) honfitárunk is a mezőnyben...Nem viccel 3x6db-ot akar!
... azt hiszi 2 nappal előbb nyom neki... az neki jó... Dehogy... csak felveri... vagyis jó! ... Az eladónak! :)
A mezőny állása. a motorokra.... :) ::: Kezd izgi lenni :)
5x6 motorocska... [#finom] Akinek persze kell... én nem pályázok rá... nem fogtok meglátni az utolsó 0,5mp-ben :) ::: Mint vevő...)

... azt hiszi 2 nappal előbb nyom neki... az neki jó... Dehogy... csak felveri... vagyis jó! ... Az eladónak! :)
A mezőny állása. a motorokra.... :) ::: Kezd izgi lenni :)
5x6 motorocska... [#finom] Akinek persze kell... én nem pályázok rá... nem fogtok meglátni az utolsó 0,5mp-ben :) ::: Mint vevő...)
Cím: Re:Léptetőmotor
Írta: robroy007 Dátum 2007 december 06, 14:29
Írta: robroy007 Dátum 2007 december 06, 14:29
egyszer mindent el kell kezdeni!
ha esetleg megnyerem akkor a szabad ész biztos eladom
ha esetleg megnyerem akkor a szabad ész biztos eladom
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 december 06, 14:43
Írta: bmejdz9nu Dátum 2007 december 06, 14:43
Gond lehet még a netes kapcsolati képesség...
Sőt ha nem nyered meg a kíván 3 csomagot... elállhatsz a nyerés után a dologtól... (ebay szabályzat - sokan nem tudják) de valószinű a Német eladónak még van pár csomagja... tartalékba erre az esetre :) (így szokták)
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 december 06, 21:58
Írta: bmejdz9nu Dátum 2007 december 06, 21:58
Ebay tippek :) :) :)
Egyébként azt vettem észre... hogy decemberben sokkal könnyebb megvenni bármi CNC-s dolgot az Ebay-on... (tavalyi tapasztalat is)
Az emberek minden "felesleget" el akarnak adni... és semmit sem venni ebben a témában... vagy is inkább "mindennapos" felhasználási dolgokra költik a pénzüket... ez érthető is...
A posta az teljesen full-on van ilyenkor...kétszer annyi idő minden... amit most rendelek már valószinűleg csak jövőre.... :) (USA)
Aztán jan-feb-márc... teljes katasztrófa... minden CNC-s dolognak akkora ára lesz, hogy csak "meg döbbenten" néztem...pl. tavaly... [#nyes]
Egyébként azt vettem észre... hogy decemberben sokkal könnyebb megvenni bármi CNC-s dolgot az Ebay-on... (tavalyi tapasztalat is)
Az emberek minden "felesleget" el akarnak adni... és semmit sem venni ebben a témában... vagy is inkább "mindennapos" felhasználási dolgokra költik a pénzüket... ez érthető is...
A posta az teljesen full-on van ilyenkor...kétszer annyi idő minden... amit most rendelek már valószinűleg csak jövőre.... :) (USA)
Aztán jan-feb-márc... teljes katasztrófa... minden CNC-s dolognak akkora ára lesz, hogy csak "meg döbbenten" néztem...pl. tavaly... [#nyes]
Cím: Re:Léptetőmotor
Írta: Farkas Ádám Dátum 2007 december 08, 09:58
Írta: Farkas Ádám Dátum 2007 december 08, 09:58
Lejártak a motorok!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 december 08, 10:07
Írta: bmejdz9nu Dátum 2007 december 08, 10:07
Szörnyű drágán végezeték... szerintem... erre nem számítottam...
Cím: Re:Léptetőmotor
Írta: robroy007 Dátum 2007 december 08, 11:18
Írta: robroy007 Dátum 2007 december 08, 11:18
ez a vonat elmen de ugye busz vonat nő után nem futunk!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 december 08, 11:52
Írta: bmejdz9nu Dátum 2007 december 08, 11:52
Hogy legyen ma min csámcsogni ... én is tettem ezekre... De nem akarom azért! Csak hálám jeléül, mert a német megírta a szállítási költséget (15 Euro)... így illik! Adtam neki tehát 5 Eurót! Értitek ugye?
.... Ha már nincs Ebay topikunk ... :)
Ezek már komolyabb darabok... adatlappal...

.... Ha már nincs Ebay topikunk ... :)
Ezek már komolyabb darabok... adatlappal...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 december 08, 21:31
Írta: 000000000 Dátum 2007 december 08, 21:31
Szia Péter!
Csak rajtad múlik, hogy lessz-e Ebay topikunk.Én szívesen olvasnám a vásárlási és eladási trükkjeidet és gondolom nem vagyok egyedül.
Csak rajtad múlik, hogy lessz-e Ebay topikunk.Én szívesen olvasnám a vásárlási és eladási trükkjeidet és gondolom nem vagyok egyedül.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2007 december 08, 21:33
Írta: bmejdz9nu Dátum 2007 december 08, 21:33
Ez egy nagyon bonyulult "játék"... jól csinálni... pl. tisztába kell lenni a szállítási díjakkal is... (interneten publikus minden stb..)
Ezt azért is találták ki az amerikaiak... mert náluk tilos a szerencsejáték... (kivétel egy két hely pl. Las Vegas)
Na így kell elképzelni... meg az amcsi inkább odadja 1 USD-ért mint kidobja... más a szemlélet stb... egyszer... majd... :)
De főleg az lenne a fontos, hogy kell eladni! szerintem. Nagy a szabad világ!
Itt pl. az Eu... csak élni kell tudni a lehetőségekkel! Nem csak azt kell észrevenni, hogy a határon behozhatsz bármit! Ki is vihetsz!
Csak fel tudjuk venni a versenyt (pl. órabérben) nyugati polgártársainkkal... :)
Ezt azért is találták ki az amerikaiak... mert náluk tilos a szerencsejáték... (kivétel egy két hely pl. Las Vegas)
Na így kell elképzelni... meg az amcsi inkább odadja 1 USD-ért mint kidobja... más a szemlélet stb... egyszer... majd... :)
De főleg az lenne a fontos, hogy kell eladni! szerintem. Nagy a szabad világ!
Itt pl. az Eu... csak élni kell tudni a lehetőségekkel! Nem csak azt kell észrevenni, hogy a határon behozhatsz bármit! Ki is vihetsz!
Csak fel tudjuk venni a versenyt (pl. órabérben) nyugati polgártársainkkal... :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2007 december 08, 21:42
Írta: 000000000 Dátum 2007 december 08, 21:42
Las Vegas fantasztikus hely, csak tátottam a számat.
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2008 január 02, 18:46
Írta: juh0557j0 Dátum 2008 január 02, 18:46
Tekercselt már valaki léptetőmotort?
Csak annyi érdekelne, hogy egy kb 4Nm-es motornak milyen vastak huzallal és hány menettel vannak tekerve a tekercsei?
Csak annyi érdekelne, hogy egy kb 4Nm-es motornak milyen vastak huzallal és hány menettel vannak tekerve a tekercsei?
Cím: Re:Léptetőmotor
Írta: crgs7u9wg Dátum 2008 január 02, 18:56
Írta: crgs7u9wg Dátum 2008 január 02, 18:56
szerintem is nagyon jo volna egy ebay topic, amiket az ember lat, meg hall, hogy mik vannak/lehetnek, elkepeszto, csak hat ugye ha valaki nem tudja, hogyan kell jol csinalni nem szivesen maszik bele a buktatokba, szoval hajra ebay topic :)
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2008 január 03, 11:23
Írta: juh0557j0 Dátum 2008 január 03, 11:23
Látom senki.( rajtam kívül [#wink] )
Mivel gyengének bizonyult és üresen is csak 800-at forgott, szétbontottam. Volt egy ugyanolyan méretekkel rendelkező mocim, ami forgott 3000-et. Összahasonlítottam és áttekertem ugyanolyanra. Most már 3200-at forog ez is!
Mivel gyengének bizonyult és üresen is csak 800-at forgott, szétbontottam. Volt egy ugyanolyan méretekkel rendelkező mocim, ami forgott 3000-et. Összahasonlítottam és áttekertem ugyanolyanra. Most már 3200-at forog ez is!
Cím: Re:Léptetőmotor
Írta: dg8n4i8x Dátum 2008 január 03, 11:24
Írta: dg8n4i8x Dátum 2008 január 03, 11:24
Hogy tekerted át? Mi változott? Nagyobb keresztmetszet, kissebb menetszám?
Cím: Re:Léptetőmotor
Írta: HJózsi Dátum 2008 január 03, 11:28
Írta: HJózsi Dátum 2008 január 03, 11:28
És fotót nem csináltál? ... [#confused] Huzalvastagság, menetszám, ráfordított idő? ...[#wave]
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2008 január 03, 21:18
Írta: juh0557j0 Dátum 2008 január 03, 21:18
Az ötlen onnét jött, hogy volt egy ugyanolyanmotorom mint az a 3 ami a gépen van. Szétszedtem mindkettő fajtát és összehasonlítottam. Lebontottam az eredeti tekercset, megszámoltam hány menet van rajta és lerajzoltam, hogy mikor merre megy a vezeték. Lebontottam egy tekercsrészt a jó motorról is amit utána visszatekertem ugyanúgy.
A jó ( erősebb) motoron 35 menet volt 2 szál 0,4-es huzallal párhuzamosan tekerve. A gyengébben 77 menet volt 0,35-ös huzallal szintén párhuzamosan tekerve.
Mivel bipolárisra tekertem elég volt egy szálat vinnem, így 0,7-es huzallal apám visszatekerte úgy ahogy volt, csak 35 menetet a 77 helyett.
Eredmény : eredeti üresjárási fordulat 800, ami a gépen direktben hajtva a trapézorsót 2m/percre volt képes, de azt sem stabilan. Áttekerés után 3000 lett a fordulat és 3,5m/ percet is tud a gépen.
Lebontás kb.: 2 óra, visszatekerni egy óra.
A jó ( erősebb) motoron 35 menet volt 2 szál 0,4-es huzallal párhuzamosan tekerve. A gyengébben 77 menet volt 0,35-ös huzallal szintén párhuzamosan tekerve.
Mivel bipolárisra tekertem elég volt egy szálat vinnem, így 0,7-es huzallal apám visszatekerte úgy ahogy volt, csak 35 menetet a 77 helyett.
Eredmény : eredeti üresjárási fordulat 800, ami a gépen direktben hajtva a trapézorsót 2m/percre volt képes, de azt sem stabilan. Áttekerés után 3000 lett a fordulat és 3,5m/ percet is tud a gépen.
Lebontás kb.: 2 óra, visszatekerni egy óra.
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2008 január 03, 21:26
Írta: juh0557j0 Dátum 2008 január 03, 21:26
Sajnos az első kép csak telefonos és kellőképpen homályos :

A lebontott állórész így néz ki :


Sajnos a végén a nagy sietségben elmaradt a fényképezés, de úgyis leveszem a motort még kuplungcsere miatt, akkor majd lefényképezem.
A lebontott állórész így néz ki :
Sajnos a végén a nagy sietségben elmaradt a fényképezés, de úgyis leveszem a motort még kuplungcsere miatt, akkor majd lefényképezem.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 január 04, 11:01
Írta: 000000000 Dátum 2008 január 04, 11:01
Nálad nem merült fel az a többször megemlített probléma, hogy a forgórész lemágneseződik a szétszereléskor?
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2008 január 04, 12:17
Írta: juh0557j0 Dátum 2008 január 04, 12:17
Én még nem is hallottam ilyenről egész addig amíg Karcsi nem mondta. Egy éjszakát szét volt szedve, de semmi gond nem volt vele.
Valójában nem is értem, hogy miért mágneseződne le egy ilyen erős mágnes. Hiszen menet közben, főleg amikor lefullad és a vezérlést meg kapja nagyon erős ellentétes polarítású mágnesezéseket is kap és az nem árt neki, akkor magától a levegőben mitől gyengülne? [#confused]
Valójában nem is értem, hogy miért mágneseződne le egy ilyen erős mágnes. Hiszen menet közben, főleg amikor lefullad és a vezérlést meg kapja nagyon erős ellentétes polarítású mágnesezéseket is kap és az nem árt neki, akkor magától a levegőben mitől gyengülne? [#confused]
Cím: Re:Léptetőmotor
Írta: HJózsi Dátum 2008 január 04, 12:20
Írta: HJózsi Dátum 2008 január 04, 12:20
Köszi a dokumentálásért és GRATULA! :) Lehet, hogy beindítod a léptető tuningot ? ... Bár a kisebbeket biztosan nehezebb...
Cím: Re:Léptetőmotor
Írta: ebalint Dátum 2008 január 04, 12:36
Írta: ebalint Dátum 2008 január 04, 12:36
Szép és eredményes munka!
[#wink]
A legjobbakat, ebalint
[#wink]
A legjobbakat, ebalint
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 január 04, 16:48
Írta: 000000000 Dátum 2008 január 04, 16:48
Gratula az alsó képhez (is)!
Nagyon jól sikerült!
Nagyon jól sikerült!
Cím: Re:Léptetőmotor
Írta: 6x509vxe Dátum 2008 január 06, 21:40
Írta: 6x509vxe Dátum 2008 január 06, 21:40
Hali,valoban lemagnesezodik szetszedeskor,ezt sajna csak akkor tudtam meg amikor osszeraktam,es lenyegesen gyengebb lett mint amihez nem nyultam.viszont hangszorokat javitok,beraktam az impulzusmagnesezobe,es mar fel is delejeztem.
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2008 január 06, 22:32
Írta: juh0557j0 Dátum 2008 január 06, 22:32
Akkor az én esetem ezt cáfolja.
Még jó, hogy előtte nem szólt senki, mert akkor nem mertem volna szétszedni.
Neked mennyi ideig volt szétszedve?
Még jó, hogy előtte nem szólt senki, mert akkor nem mertem volna szétszedni.
Neked mennyi ideig volt szétszedve?
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2008 január 07, 06:23
Írta: Szalai György Dátum 2008 január 07, 06:23
"beraktam az impulzusmagnesezobe"
Hoppá, eddig erről még nem esett szó!
Pedig, nagyon része lehetne a Hobbyzásnak.
Hát mi is ez? Hogy is működik? Mik a törvényei?
Menyire lesz erős a mágnes?
Persze azzal tisztában vagyok, hogy a csavarhúzót hogyan lehet mágnesezni, de az a kiscserkész módszer.
Hogy csinálják a szakemberek?
Hoppá, eddig erről még nem esett szó!
Pedig, nagyon része lehetne a Hobbyzásnak.
Hát mi is ez? Hogy is működik? Mik a törvényei?
Menyire lesz erős a mágnes?
Persze azzal tisztában vagyok, hogy a csavarhúzót hogyan lehet mágnesezni, de az a kiscserkész módszer.
Hogy csinálják a szakemberek?
Cím: Re:Léptetőmotor
Írta: vthgizrff Dátum 2008 január 07, 06:45
Írta: vthgizrff Dátum 2008 január 07, 06:45
Szia Attila!
Van nekem is egy nagyobb léptető motorom ami leégett. Annak a tekercselését elválallnád?
Ha igen keress meg légyszíves: znagy@globonet.hu
Van nekem is egy nagyobb léptető motorom ami leégett. Annak a tekercselését elválallnád?
Ha igen keress meg légyszíves: znagy@globonet.hu
Cím: Re:Léptetőmotor
Írta: 6x509vxe Dátum 2008 január 09, 22:56
Írta: 6x509vxe Dátum 2008 január 09, 22:56
az impulzusmagnesezo nem nagy dolog.kell hozza egy tekercs(nalam 48menet,vastag szogletes rezdrot),amire rasutok egy nagy tirisztoron keresztul egyeniranyitott 310v-ra feltoltott sokezer mikros kondikat.a magnesezes sikere persze fugg a kondik erteketol.a 220mm-es magneseket telitesig tolti
Cím: Re:Léptetőmotor
Írta: crgs7u9wg Dátum 2008 január 09, 23:15
Írta: crgs7u9wg Dátum 2008 január 09, 23:15
"sokezer mikros" feltetelezem elkokrol van szo, a lenyeg az, hogy impulzus uzemre ezek nem nagyon alkalmasak, egyreszt hamar tonkremennek, masreszrol nem adnak le eleg nagy aramot, ha mar nincs rendes, erre a celra keszitett impulzus-kondi, akkor lehet hasznalni ilyen motorindito/fazisjavito kondikat, a 220v es a tirisztor stimmel, mondjuk azt meg erdemes hozzatenni, hogy erdemes egy izzon keresztul tolteni oket es akkor nem kell minden suteskor a biztositekhoz rohangalni :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 január 15, 20:58
Írta: 000000000 Dátum 2008 január 15, 20:58
Sziasztok! Slo-syn M062-LE09 8 kivezetéses léptetőmotorjaimhoz sajnos sehol nem találok a infót a kivezetéseiről, nem tudom melyik vezeték melyik.
http://www.g2plane.com/stepm.jpg
Tudnátok segíteni nekem ez ügyben?
Köszi
http://www.g2plane.com/stepm.jpg
Tudnátok segíteni nekem ez ügyben?
Köszi
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 január 17, 12:04
Írta: 000000000 Dátum 2008 január 17, 12:04
Hello! Egy 20mm/ford menetemelkedésű golyósorsóhoz ?Nm nyomatékú léptetőmotort javasolnátok? Az X és Z irány mozgatására használnám ezeket az orsókat.
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2008 január 17, 22:32
Írta: juh0557j0 Dátum 2008 január 17, 22:32
Az összetartozó végeket megkeresed műszerrel, a többit pedig próbálgatással.
Cím: Re:Léptetőmotor
Írta: Szedlay Pál Dátum 2008 január 17, 23:55
Írta: Szedlay Pál Dátum 2008 január 17, 23:55
kell hozzá egy ceruzaelem.
A tekercsek végeit kell nyomkodni a ceruzaelemhez és vizsgálni, hogy megmozdul-e.
Ezzel tudom nem segítettem, mert én sem tudom pontosan,mikor mit hová, mindig telefonon irányít egy elektromérnök haverom mit hová nyomjak, de egy
hozzáértő könnyen tudna neked segíteni.
A tekercsek végeit kell nyomkodni a ceruzaelemhez és vizsgálni, hogy megmozdul-e.
Ezzel tudom nem segítettem, mert én sem tudom pontosan,mikor mit hová, mindig telefonon irányít egy elektromérnök haverom mit hová nyomjak, de egy
hozzáértő könnyen tudna neked segíteni.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2008 január 18, 07:16
Írta: Szalai György Dátum 2008 január 18, 07:16
Cím: Re:Léptetőmotor
Írta: Szedlay Pál Dátum 2008 január 18, 13:05
Írta: Szedlay Pál Dátum 2008 január 18, 13:05
Köszönjük T.Robert nevében is.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 január 19, 00:16
Írta: 000000000 Dátum 2008 január 19, 00:16
Köszönöm a segítségeket! Miután méricskéltem, és próbáltam meghatározni a kivezetéseket, mégegyszer nekifutottam az interneten hátha találok valamit, és hál' istennek találtam egy vezérlőt aminek az adatlapján megvolt ennek a motornak a bekötése is.
Cím: Re:Léptetőmotor
Írta: rbbhbyvfs Dátum 2008 január 28, 17:14
Írta: rbbhbyvfs Dátum 2008 január 28, 17:14
Mi a véleményetek ezekről a motorokról:
Adatlap
Mennyire problémás a tengelyen a fogazás, gondolok itt arra, hogy hogyan lehet rá biztonságosan rögzíteni valamit....
Köszi
Adatlap
Mennyire problémás a tengelyen a fogazás, gondolok itt arra, hogy hogyan lehet rá biztonságosan rögzíteni valamit....
Köszi
Cím: Re:Léptetőmotor
Írta: e7c897sd8 Dátum 2008 január 28, 17:32
Írta: e7c897sd8 Dátum 2008 január 28, 17:32
Szia Zoli!
Üdv a fórumon! Remélem a H.elekronikás dolgok megoldódtak!
A rögzítés szerintem nem gond. A teng, kapcsolók szorítással is dolgozhatnak. A tengelyre passzentosan hozzámunkálod a kuplungot és kész!
Üdv a fórumon! Remélem a H.elekronikás dolgok megoldódtak!
A rögzítés szerintem nem gond. A teng, kapcsolók szorítással is dolgozhatnak. A tengelyre passzentosan hozzámunkálod a kuplungot és kész!
Cím: Re:Léptetőmotor
Írta: dg8n4i8x Dátum 2008 január 28, 17:44
Írta: dg8n4i8x Dátum 2008 január 28, 17:44
Szia!
Ez igen jó kis motor! Nekem ilyen viszi az Y és a Z tengelyt, a Z-n kb 6kg van 3mm emelkedésű 8-as kétbekezdésű orsóval (ez már nem önzáró!) simán bírja a 2000mm/perces sebességet!
Ez igen jó kis motor! Nekem ilyen viszi az Y és a Z tengelyt, a Z-n kb 6kg van 3mm emelkedésű 8-as kétbekezdésű orsóval (ez már nem önzáró!) simán bírja a 2000mm/perces sebességet!
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 január 28, 18:19
Írta: svejk Dátum 2008 január 28, 18:19
Ez tényleg jó, annak idején slágertermék volt a házigazdánál is.
Cím: Re:Léptetőmotor
Írta: vthgizrff Dátum 2008 január 28, 18:36
Írta: vthgizrff Dátum 2008 január 28, 18:36
Nekem is van belőle pár darab, ha valakit érdekel eladó.
znagy@globonet.hu
znagy@globonet.hu
Cím: Re:Léptetőmotor
Írta: nb8v4eyzr Dátum 2008 január 28, 21:01
Írta: nb8v4eyzr Dátum 2008 január 28, 21:01
Helló Zoltán, e-mailed érkezett.
Cím: Re:Léptetőmotor
Írta: rbbhbyvfs Dátum 2008 január 28, 21:26
Írta: rbbhbyvfs Dátum 2008 január 28, 21:26
Köszönöm, akkor én is megpróbálom elôször felhasználni ôket, aztán ha mégsem elég erôsek, lesz 4 db ilyenem elcserélni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 január 30, 10:54
Írta: 000000000 Dátum 2008 január 30, 10:54
Üdv.
Egy jó ideje követem a HobbyCNC.hu-t és nagyon tetszik amit csináltok. Némi barkácsolási tapasztalatom van (főleg elektronika), fizika és informatika tanárként az elvek, elméletek nem jelentenek gondot viszont a szakma és gyakorlat az egészen más...ott van tanulnivalóm.
Rögtön kérdeznék: Egy E1N eszterga szán X illetve Y mozgatásához kb. mekkora (?Nm) léptető elegendő fogasáttét nélkül (persze sejtem a sebbeség gondot)?
Egy jó ideje követem a HobbyCNC.hu-t és nagyon tetszik amit csináltok. Némi barkácsolási tapasztalatom van (főleg elektronika), fizika és informatika tanárként az elvek, elméletek nem jelentenek gondot viszont a szakma és gyakorlat az egészen más...ott van tanulnivalóm.
Rögtön kérdeznék: Egy E1N eszterga szán X illetve Y mozgatásához kb. mekkora (?Nm) léptető elegendő fogasáttét nélkül (persze sejtem a sebbeség gondot)?
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2008 január 30, 18:22
Írta: 4mjnxdwuu Dátum 2008 január 30, 18:22
Hali,
Nézz szét itt, "Képletek, számítások"
Nézz szét itt, "Képletek, számítások"
Cím: Re:Léptetőmotor
Írta: hje3wyntn Dátum 2008 január 31, 21:04
Írta: hje3wyntn Dátum 2008 január 31, 21:04
Helló,üdv. mindenkinek! Motor beszerzés elött állok, segítségeteket kérem. Van-e valakinek tapasztalata 0,9 fokos motorokkal? Az érdekelne, hogy a több lépésszám miatt kisseb fordulatszámot tudnak ezek elérni? A féllépéses módban jól működnek? Vagy érdemes-e egyáltalán ilyen motorral foglalkozni? A felbontása miatt kedvezőbbnek tűnik. Lehet hogy volt már szó rólla, de még nem tudtam az egész fórunot átolvasni. Van egy kiszemelt tipus is: Nanotec ST5709l4008 (1,35Nm 0,5ohm 4A 2V 1mH 0,9 fok Unipolárisan kötve) A "kezdő vagyok" topicban már írtam, mihez szeretném használni. A véleményeket előre is köszönöm!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 január 31, 21:47
Írta: 000000000 Dátum 2008 január 31, 21:47
Szia!
A 0.9 fokos stepmotorok egyre inkább előtérbe
kerülnek, sokkal jobb dinamikai, rezgési
tulajdonságaik vannak, mint 1.8 társainak.
Persze drágábbak is picit.
Ettől persze ezek is "csak" step motorok, nagy csodát
nem kell tőlük elvárni. Én pl. most forgatónak
használok 0.9 fokost, 4-es microstep üzemmódban
nagyon szépen működik, fizikailag is kimérve
meglépi a negyedlépést.
A 0.9 fokos stepmotorok egyre inkább előtérbe
kerülnek, sokkal jobb dinamikai, rezgési
tulajdonságaik vannak, mint 1.8 társainak.
Persze drágábbak is picit.
Ettől persze ezek is "csak" step motorok, nagy csodát
nem kell tőlük elvárni. Én pl. most forgatónak
használok 0.9 fokost, 4-es microstep üzemmódban
nagyon szépen működik, fizikailag is kimérve
meglépi a negyedlépést.
Cím: Re:Léptetőmotor
Írta: hje3wyntn Dátum 2008 február 03, 16:41
Írta: hje3wyntn Dátum 2008 február 03, 16:41
Szia Tibor45!
Fordulatszámban is nyújtják azt mint az 1.8-as motorok? Gondolom azért próbálgattad.Mivel átételezted a forgatód? Vagy direktbe megy?
Fordulatszámban is nyújtják azt mint az 1.8-as motorok? Gondolom azért próbálgattad.Mivel átételezted a forgatód? Vagy direktbe megy?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 február 03, 17:19
Írta: 000000000 Dátum 2008 február 03, 17:19
Direktbe hajtom, a felső fordulatszámát
nem néztem, csak 600 rpm-ig. Addig tökéletes.
Ez egyébként egy kicsi, 42 mm-es motor.
(Megjegyezem: e fölött sokkal a világ legjobb
stepmotorját sem érdemes pozícióhajtásként,
nagyobb tömegeket mozgatva használni, ha
soha nem szeretnél pozíció tévesztéssel
bajlódni.:) Ez az én véleményem, de ne félj lesz
olyan, aki 3.000-es fordulatot is bevállal
papíron Neked.)
nem néztem, csak 600 rpm-ig. Addig tökéletes.
Ez egyébként egy kicsi, 42 mm-es motor.
(Megjegyezem: e fölött sokkal a világ legjobb
stepmotorját sem érdemes pozícióhajtásként,
nagyobb tömegeket mozgatva használni, ha
soha nem szeretnél pozíció tévesztéssel
bajlódni.:) Ez az én véleményem, de ne félj lesz
olyan, aki 3.000-es fordulatot is bevállal
papíron Neked.)
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2008 február 06, 23:18
Írta: juh0557j0 Dátum 2008 február 06, 23:18
A múltkori tekercselés eredményéről még mindig nem tudtam képet csinálni ( amit ígértem), de itt egy újabb munkám ereménye :
Előtte :

Utána :

Előtte :
Utána :
Cím: Re:Léptetőmotor
Írta: Karácsony Sándor Dátum 2008 február 07, 08:39
Írta: Karácsony Sándor Dátum 2008 február 07, 08:39
Az előző motorral összehasonlítva amit tekertél Az állórészeket :Az előző 5*8 fog ez 6*8 fog. Mind a kettő 200lépésű?
Jól néz ki.
Jól néz ki.
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2008 február 07, 21:51
Írta: juh0557j0 Dátum 2008 február 07, 21:51
Igen, ugyanannyi lépésű mindkettő.
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2008 február 20, 22:26
Írta: 4mjnxdwuu Dátum 2008 február 20, 22:26
Erről nem találtam semmit, nem ismeri valaki az áramát, és fesz értékét, esetleg ?Nm ?
SIGMA INSTRUMENTS INC 21-3450D200-B06L bipolár moci ( bazi nagy ... )
SIGMA INSTRUMENTS INC 21-3450D200-B06L bipolár moci ( bazi nagy ... )
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2008 február 21, 06:21
Írta: Szalai György Dátum 2008 február 21, 06:21
Na erre irigy vagyok.
A SIGMA INSTRUMENTS INC oldalán alul van egy link a PACIFIC SCIENTIFIC oldalára. Talán az a gyártó.
Nézz körül.
A SIGMA INSTRUMENTS INC oldalán alul van egy link a PACIFIC SCIENTIFIC oldalára. Talán az a gyártó.
Nézz körül.
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2008 február 21, 06:32
Írta: 4mjnxdwuu Dátum 2008 február 21, 06:32
Köszike, ez egy régebbi darab, de ott nem találom, pedig érdekelne mit tudhat. Kompletten volt 19*5,08 -as orsóval csapágyazva, porvédő csővel... és jó lenne használni.[#fejvakaras]
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 február 21, 10:46
Írta: bmejdz9nu Dátum 2008 február 21, 10:46

Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 február 24, 21:19
Írta: 000000000 Dátum 2008 február 24, 21:19
Egy léptető forgatása jelgenerátorral, köszörült vezérlővel.video
Cím: Re:Léptetőmotor
Írta: i0ief5xw5 Dátum 2008 március 21, 12:37
Írta: i0ief5xw5 Dátum 2008 március 21, 12:37
Üdv mindenkinek volna egy kérdésem tude valaki ezekröl a mocikrol valamit a neten semmit nem találtam roluk és fellehet e használni őket egy kisseb géphez. Előre is köszönöm a segitséget
AZ ELSŐ
EM-34
STH-39D150-01
Második
STH-39D236-02
1.8DEG/STEP 30ohm
Harmadik
STH-39D213
1.8DEG/STEP 5.2OHM
AZ ELSŐ
EM-34
STH-39D150-01
Második
STH-39D236-02
1.8DEG/STEP 30ohm
Harmadik
STH-39D213
1.8DEG/STEP 5.2OHM
Cím: Re:Léptetőmotor
Írta: ra8nsmk6w Dátum 2008 március 21, 12:56
Írta: ra8nsmk6w Dátum 2008 március 21, 12:56
Ezek régebbi mátrixnyomtató motorok. Alkalmazni lehet apró nyomtató méretü tanulógépen. Különösebb forgácsolási teljesitményt ne várj, a mozgatandó tömeg se legyen több 2kg- nál, de akkor már a megvezetésre és orsókra is nagyon oda kell figyelni. (OLVASGASS VISSZA!!!)
Cím: Re:Léptetőmotor
Írta: i0ief5xw5 Dátum 2008 március 21, 15:31
Írta: i0ief5xw5 Dátum 2008 március 21, 15:31
Köszi de hány voltrol mennek? és mennyi a max amper? mert nem tudom?!
Cím: Re:Léptetőmotor
Írta: t6t6sjg67 Dátum 2008 március 23, 15:45
Írta: t6t6sjg67 Dátum 2008 március 23, 15:45
sziasztok!
keresgéltem, és ráakadtam ezekre a motorokra:
http://cgi.ebay.de/SCHRITTMOTOR-Typ-KH56LM2B006A-1-8-DEG-STEP_W0QQitemZ350037794273QQihZ022QQcategoryZ9723QQssPageNameZWDVWQQrdZ1QQcmdZViewItem
szerintetek mekkora nyomatéka lehet ennek a motornak? nemtalálok sehol rola doksit..:(
KÖszi.: ZOli
keresgéltem, és ráakadtam ezekre a motorokra:
http://cgi.ebay.de/SCHRITTMOTOR-Typ-KH56LM2B006A-1-8-DEG-STEP_W0QQitemZ350037794273QQihZ022QQcategoryZ9723QQssPageNameZWDVWQQrdZ1QQcmdZViewItem
szerintetek mekkora nyomatéka lehet ennek a motornak? nemtalálok sehol rola doksit..:(
KÖszi.: ZOli
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 március 23, 19:54
Írta: 000000000 Dátum 2008 március 23, 19:54
1 Nm korul +-0,5
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 április 18, 13:29
Írta: 000000000 Dátum 2008 április 18, 13:29
helló Frórum!
Már 1-2 hete egy érdekes problémával küzdök..[#fejvakaras] ami a következő : ha be van kötve a moci a vezérlőre akkor egybél kifüstöl 1 fett, de mindig ugyan ott ha lekötöm a mocit akkor semmi gond, ..már mértem a moci kábeleit és egyforma 1,2 ohm ellen álást mértem mindnél.és már kicseréltem egyszerre mind a 4 db fettet is, vagyis ezekszerint a motorral nincs gond, De akkor mi lehet az oka amiért a fett mindig elszál..??? a hiba előtt sem és utána sem volt változtatás semmin, ezért nem értem a probléma okát eggyik percről a másikra, mi romolhatott el benne ......kiváncsi vagyok a ti véleményetekre...halli...
Már 1-2 hete egy érdekes problémával küzdök..[#fejvakaras] ami a következő : ha be van kötve a moci a vezérlőre akkor egybél kifüstöl 1 fett, de mindig ugyan ott ha lekötöm a mocit akkor semmi gond, ..már mértem a moci kábeleit és egyforma 1,2 ohm ellen álást mértem mindnél.és már kicseréltem egyszerre mind a 4 db fettet is, vagyis ezekszerint a motorral nincs gond, De akkor mi lehet az oka amiért a fett mindig elszál..??? a hiba előtt sem és utána sem volt változtatás semmin, ezért nem értem a probléma okát eggyik percről a másikra, mi romolhatott el benne ......kiváncsi vagyok a ti véleményetekre...halli...
Cím: Re:Léptetőmotor
Írta: 3vv2btrhv Dátum 2008 április 18, 14:21
Írta: 3vv2btrhv Dátum 2008 április 18, 14:21
motort cseréld ki egy másikra !!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 április 18, 14:34
Írta: 000000000 Dátum 2008 április 18, 14:34
Sajnos valahogy nem mukodik az url beszúrás....
Itt megtalálod: http://cnctar.hobbycnc.hu/Kov%e1cs%20L%f3r%e1nt/Hasznos%20pdf/Sanyo-Denki%2520katalog.pdf
Itt megtalálod: http://cnctar.hobbycnc.hu/Kov%e1cs%20L%f3r%e1nt/Hasznos%20pdf/Sanyo-Denki%2520katalog.pdf
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2008 április 19, 10:51
Írta: e3h0cv4ph Dátum 2008 április 19, 10:51
Szia pityu!
Elsőre zárlatgyanús a dolog!
Ha motor nélkül nincs gond akkor valószínű, hogy a terheléssel (rákötött motor) lesz a gond. Nézd meg, hogy a motornak a vezetékei nem érnek -e össze valahol vagy nem testelnek le valahol.
Ha még nincs meg a hiba javaslok bekötni a hibásnak vélt kivezetésre (esetleg az összesre) egy soros teljesítményellenállást (néhány ohm, 5...10W) mert így megvéded a FET-et (nem kell olyan sűrűn cserélni).
Így látatlanba többet nem tudok, de ha néhány fotót csinálnál róla lehet, hogy többet tudnánk segíteni.
Üdv: TT (ja és mégegy, hova valósi vagy? Hátha segíteni is tudunk)
Elsőre zárlatgyanús a dolog!
Ha motor nélkül nincs gond akkor valószínű, hogy a terheléssel (rákötött motor) lesz a gond. Nézd meg, hogy a motornak a vezetékei nem érnek -e össze valahol vagy nem testelnek le valahol.
Ha még nincs meg a hiba javaslok bekötni a hibásnak vélt kivezetésre (esetleg az összesre) egy soros teljesítményellenállást (néhány ohm, 5...10W) mert így megvéded a FET-et (nem kell olyan sűrűn cserélni).
Így látatlanba többet nem tudok, de ha néhány fotót csinálnál róla lehet, hogy többet tudnánk segíteni.
Üdv: TT (ja és mégegy, hova valósi vagy? Hátha segíteni is tudunk)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 április 19, 15:23
Írta: 000000000 Dátum 2008 április 19, 15:23
helló Tatai!
Már végig lejátszottam ezeket a lehetőségeket...motorcsere..fett csere...zárlatvizsgálat..stb...de semmi változás egy másik mocival próbálva is elkezd melegedni a fet.a motort mértem ohmikusan is és minden tekercs egyforma 1,1 ohm...mértem az áram felvételeket is az is mind egyforma volt...szóval nem tudom mi a gond a mocival vagy a vezérlővel van e a gond. de azóta az x-tengely része is megált....z-x már kilőve....Szabolcsi gyerek vagyok...skypon van egy magán cnc-chatümk is ha gondolod lépjbe hozzánk a maffia15 néven megtalálsz és dumálunk...vagyunk már egy páran akik ott jelen vagyunk a nap sok órájában ....
Köszi a tippet megpróbázom.....
Már végig lejátszottam ezeket a lehetőségeket...motorcsere..fett csere...zárlatvizsgálat..stb...de semmi változás egy másik mocival próbálva is elkezd melegedni a fet.a motort mértem ohmikusan is és minden tekercs egyforma 1,1 ohm...mértem az áram felvételeket is az is mind egyforma volt...szóval nem tudom mi a gond a mocival vagy a vezérlővel van e a gond. de azóta az x-tengely része is megált....z-x már kilőve....Szabolcsi gyerek vagyok...skypon van egy magán cnc-chatümk is ha gondolod lépjbe hozzánk a maffia15 néven megtalálsz és dumálunk...vagyunk már egy páran akik ott jelen vagyunk a nap sok órájában ....
Köszi a tippet megpróbázom.....
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2008 április 19, 15:40
Írta: 4mjnxdwuu Dátum 2008 április 19, 15:40
Hali, nem tudom milyen vezérlőt használsz,? azt próbáld ki hogy ráteszel egy nagyobb feszű motort, és csak akkora tápot a vezérlőre mint a motor feszültsége. Ha a motor jól megy akkor az áramszabályozása halt meg. ( ha csak nem fix kitöltésű PWM-et használ...)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 április 19, 16:32
Írta: svejk Dátum 2008 április 19, 16:32
Szerintem annak a FET_nek a gate köre szakadt és a "levegőben lóg" azért melegszik. Ha a kontroller rész teljesen kivezérelné mert az lenne a rossz akkor a moci égne le.
Köss a gate-source közé egy 10k Ohmos ellenállatot.
Köss a gate-source közé egy 10k Ohmos ellenállatot.
Cím: Re:Léptetőmotor
Írta: t6t6sjg67 Dátum 2008 április 22, 19:33
Írta: t6t6sjg67 Dátum 2008 április 22, 19:33
üdv Mindenkinek!:)
szükségem lenne 3darab 1,5-2 Nm-es léptetőmotorra, illetve vezérlőre. ha tud valaki segiteni benne, nagyon megköszönném.
szükségem lenne 3darab 1,5-2 Nm-es léptetőmotorra, illetve vezérlőre. ha tud valaki segiteni benne, nagyon megköszönném.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 április 24, 20:18
Írta: 000000000 Dátum 2008 április 24, 20:18
Sziasztok!
Tanács kőne!
Mire elég ez a léptetőmotor:
VEB ROBOTRON SÖMMERDA
SP-A52/60-5100
KROS 0321
Tanács kőne!
Mire elég ez a léptetőmotor:
VEB ROBOTRON SÖMMERDA
SP-A52/60-5100
KROS 0321
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 május 12, 11:09
Írta: 000000000 Dátum 2008 május 12, 11:09
Kérdés:
Egy vezérlőn mindhárom léptetőmotornak egyformának kell lennie?
Egy vezérlőn mindhárom léptetőmotornak egyformának kell lennie?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 május 12, 11:10
Írta: 000000000 Dátum 2008 május 12, 11:10
Egy vezérlőn mindhárom léptetőmotornak egyformának kell lennie?
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2008 május 12, 12:23
Írta: D.Laci Dátum 2008 május 12, 12:23
Egy lovas kocsiba hány lovat lehet befogni? És ha többet be lehet, akkor csak egy formát lehet? :)
Viccet félretéve tedd be még vagy 5 topikba mindegyikbe 20-szor a kérdést és biztos kapsz választ! :)
A lényeget nem írod! Milyen vezérlő? Egyáltalán több motort lehet rákötni? Vagy párhuzamosan akarod bekötni a motorokat?
Viccet félretéve tedd be még vagy 5 topikba mindegyikbe 20-szor a kérdést és biztos kapsz választ! :)
A lényeget nem írod! Milyen vezérlő? Egyáltalán több motort lehet rákötni? Vagy párhuzamosan akarod bekötni a motorokat?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 május 12, 15:33
Írta: 000000000 Dátum 2008 május 12, 15:33
Azért tettem be többször a kérdést mert hiába küldtem el egyszer se jelent meg.
Egyenlőre az érdekelt hogy lehet-e őket együtt használni egy gépen.
Következő kérdés milyen vezérlővel?
Kezdő vagyok nézzétek el nekem ha bénázom!
Egyenlőre az érdekelt hogy lehet-e őket együtt használni egy gépen.
Következő kérdés milyen vezérlővel?
Kezdő vagyok nézzétek el nekem ha bénázom!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 május 12, 16:24
Írta: bmejdz9nu Dátum 2008 május 12, 16:24
Nem. Csak szokták...de milyért azt én sem tudom :)
Egy video... Egy vezérlővel... Különböző motorokkal... (ponz azt akarják szemléltetni, hogy mindegy...)
Egy video... Egy vezérlővel... Különböző motorokkal... (ponz azt akarják szemléltetni, hogy mindegy...)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 május 12, 17:02
Írta: 000000000 Dátum 2008 május 12, 17:02
Ha jól látom (bár az angol tudásom 0) a videón szerplő motorok feszültsége is különböző.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 május 13, 20:58
Írta: bmejdz9nu Dátum 2008 május 13, 20:58
Misinek :)
Ezek azok a léptető motorok:
Pacific Scientic PowerMax II. (Sigmax) M21NRXA-LSN-M1-02
Adatok a cimkéről: 2.8A, Po:58W, 1500rpm, Vs:35V... és csak 625gramm... és kerek 1Nm... (nagyfordulatú szabadalmaztatott valami...:)
Adatlap..... 48. oldalon a legelső....
A csapágyak sem semmik benne...:) Felméretes... :) ... és K. drágák... :) Na majd meglátjuk mit is tudnak... :)

Ezek azok a léptető motorok:
Pacific Scientic PowerMax II. (Sigmax) M21NRXA-LSN-M1-02
Adatok a cimkéről: 2.8A, Po:58W, 1500rpm, Vs:35V... és csak 625gramm... és kerek 1Nm... (nagyfordulatú szabadalmaztatott valami...:)
Adatlap..... 48. oldalon a legelső....
A csapágyak sem semmik benne...:) Felméretes... :) ... és K. drágák... :) Na majd meglátjuk mit is tudnak... :)
Cím: Re:Léptetőmotor
Írta: 0gbwyh99 Dátum 2008 június 04, 23:03
Írta: 0gbwyh99 Dátum 2008 június 04, 23:03
Üdv. mindenkinek .
Volna egy kérdésem, lehet hogy másoknak triviálisnak tűnik, de engem piszkál !
Melyik motor a jobb (erő, dinamika, tuning szempotjábol) ?
1.) 23SM112-030-8W-F10-2.5
2.) 23SH086-028-8W-F8-3.1
3.) 34LC066-050-8W-SB12-2.8
A kérdés azért vetődik fell, mert nyomaték szempontjábol nem nagy a különbség, árban viszont elég nagy !
Volna egy kérdésem, lehet hogy másoknak triviálisnak tűnik, de engem piszkál !
Melyik motor a jobb (erő, dinamika, tuning szempotjábol) ?
1.) 23SM112-030-8W-F10-2.5
2.) 23SH086-028-8W-F8-3.1
3.) 34LC066-050-8W-SB12-2.8
A kérdés azért vetődik fell, mert nyomaték szempontjábol nem nagy a különbség, árban viszont elég nagy !
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 június 05, 00:33
Írta: 3k74cecek Dátum 2008 június 05, 00:33
Erre csak a motorok nyomatékgörbéinek és az igényeknek az ismeretében lehet pontos választ adni.
A max. nyomaték adat ehhez kevés, tudni kellene a fordulatszám függvényében a nyomatékot.
A max. nyomaték adat ehhez kevés, tudni kellene a fordulatszám függvényében a nyomatékot.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 június 11, 20:48
Írta: 000000000 Dátum 2008 június 11, 20:48
Sziasztok! Nem tudtok véletlenül címet vagy telefonszámot Győrben, ill. Tatabányán ahol léptetőmotort, és frekiváltót lehet kapni? Köszi!
Cím: Re:Léptetőmotor
Írta: pa0n9mw Dátum 2008 augusztus 14, 09:10
Írta: pa0n9mw Dátum 2008 augusztus 14, 09:10
Üdv
Meg tudná mondani valaki ennek a Sanyo Denki léptetőmoci nyomatékát,sajna nincs feltüntetve.
TYP 103 - 718 - 0340
4.2 V 1.5 A
Köszi
végyé
Meg tudná mondani valaki ennek a Sanyo Denki léptetőmoci nyomatékát,sajna nincs feltüntetve.
TYP 103 - 718 - 0340
4.2 V 1.5 A
Köszi
végyé
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 szeptember 02, 20:59
Írta: 000000000 Dátum 2008 szeptember 02, 20:59
üdv tudja valaki hogy a három fázisu mociknál honnan lehet tudni hogy 60 vagy 120 fokos?(hub motorrol van szo amiben 3 db hall szenzor van.)help.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 szeptember 11, 15:48
Írta: svejk Dátum 2008 szeptember 11, 15:48
5 fázisú, Berger-Lahr-osok!
Megdobogtatja-e valakinek a szivét? :)
Berger-Lahr 5 fázisú vezérlő
3 csatorna, a trafó 70V/1,3kVA-es
Megdobogtatja-e valakinek a szivét? :)
Berger-Lahr 5 fázisú vezérlő
3 csatorna, a trafó 70V/1,3kVA-es
Cím: Re:Léptetőmotor
Írta: dg8n4i8x Dátum 2008 szeptember 11, 16:17
Írta: dg8n4i8x Dátum 2008 szeptember 11, 16:17
Mivel lehet hajtani? Ez is soros portos? Egyszer megnéztem egy plazmát ami háromfázisú léptetős és szintén berger lahr vezérlővel... Ki kellene hozni belőle valamit...
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 szeptember 11, 16:49
Írta: svejk Dátum 2008 szeptember 11, 16:49
Ez a feladat rám várna...:(
Mindenemű doksit szívesen fogadnék, legyen az bárminemű Berger-Lahr...
Mindenemű doksit szívesen fogadnék, legyen az bárminemű Berger-Lahr...
Cím: Re:Léptetőmotor
Írta: dg8n4i8x Dátum 2008 szeptember 11, 17:47
Írta: dg8n4i8x Dátum 2008 szeptember 11, 17:47
Sajnos doksim nincs, nem is tudtam vele sok mindent kezdeni... :(
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 szeptember 11, 20:07
Írta: svejk Dátum 2008 szeptember 11, 20:07
Még nem tom..
Odáig jutottam hogy négy opton keresztül csatlakozik és csak befelé megy jel..
Odáig jutottam hogy négy opton keresztül csatlakozik és csak befelé megy jel..
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2008 szeptember 11, 21:26
Írta: Szalai György Dátum 2008 szeptember 11, 21:26
Majd ki ugrok a székből! Pedig már aludni készültem. Csak még ide benézek utoljára.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2008 szeptember 11, 21:28
Írta: Szalai György Dátum 2008 szeptember 11, 21:28
Hány éren csatalkozik a motorhoz? 5 vagy 10?
Biztos nincs motoronkénti encoder bemenete? Mert az én Berger mocimon bizony van ám encoder.
Biztos nincs motoronkénti encoder bemenete? Mert az én Berger mocimon bizony van ám encoder.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2008 szeptember 11, 21:39
Írta: Szalai György Dátum 2008 szeptember 11, 21:39
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2008 szeptember 11, 23:18
Írta: Szalai György Dátum 2008 szeptember 11, 23:18
„négy opton keresztül csatlakozik és csak befelé megy jel..”
A http://cnctar.hobbycnc.hu/Svejk/Berger-Lahr/berger-lahr%20001.jpg-en a ventillátortól jobbra látom a motorkimeneteket, de ballra az a háromszor húsz erű szalag az mi?
A http://cnctar.hobbycnc.hu/Svejk/Berger-Lahr/berger-lahr%20001.jpg-en a ventillátortól jobbra látom a motorkimeneteket, de ballra az a háromszor húsz erű szalag az mi?
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 szeptember 11, 23:37
Írta: 3k74cecek Dátum 2008 szeptember 11, 23:37
" csak befelé megy jel.. "
Ez kizárt dolog. Akkor a motort hogy vezérli?
Valami elnézel, vagy nem jól értelmezel.
Ez kizárt dolog. Akkor a motort hogy vezérli?
Valami elnézel, vagy nem jól értelmezel.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 szeptember 12, 07:28
Írta: svejk Dátum 2008 szeptember 12, 07:28
A vezérlést illetően csak befelé megy tehát, egyirányú a kommunikáció a számítógéppel.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 szeptember 12, 07:30
Írta: svejk Dátum 2008 szeptember 12, 07:30
Természetesen 10 az 5 fázis =5x2 érpár
encoder nincs csak fék, de azt máshonnan vezérelték
encoder nincs csak fék, de azt máshonnan vezérelték
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 szeptember 13, 21:32
Írta: svejk Dátum 2008 szeptember 13, 21:32
Mivel doksit nem leltem, segítséget nem kaptam ezért maradt a magad uram ha... verzió.
Szóval működik:
step/dir
egészlépés/féllépés- ez ugye ebben az esetben 500 vagy 1000 lépés/fordulat
16 lépésben lehet állítani az áramerősséget
Élmény volt a sok szervo után egy komoly léptetős rendszer :)
Szóval működik:
step/dir
egészlépés/féllépés- ez ugye ebben az esetben 500 vagy 1000 lépés/fordulat
16 lépésben lehet állítani az áramerősséget
Élmény volt a sok szervo után egy komoly léptetős rendszer :)
Cím: Re:Léptetőmotor
Írta: wrfwxv4t9 Dátum 2008 szeptember 22, 16:37
Írta: wrfwxv4t9 Dátum 2008 szeptember 22, 16:37
Üdv minden Topiklakónak!
"Újfiú" vagyok a fórumon, így kérem, hogy kérdéseimet eként kezeljétek.
Olvasgattam is pár oldalt visszafelé, de sajna nem kaptam a kérdésemre egyértelmű választ a sok hsz. olvasása után.
Rádió-amatőr vagyok, és a hobbynk egyik fő darabja az antenna, annak is általában a kőrbeforgatható változata. Vannak ugyan gyári készítésű berendezések direkt erra a célra, amik általában egy önzáró csiga-áttételes mechanizmus, amit távvezérelten általában egy törpefeszültségű villanymotorral forgatja kőrbe, 0-360-fokos szögben az antennát. Eléggé bonyolult mechanika, meglehetősen könnyen meghibásodó kivitelben, mivel az időjárás viszontagságának nagyon ki van téve.
Felvetődött egyik amatőrtársam gondolata, hogy a forgatást meg lehetséges-e valósítani un. léptető-motorral?
Olvasgatom itt a hsz.-k között, hogy ma már egész finom, 0,9 fokos lépésekben is lehet léptető motorokat beszerezni.
Jómagam még csak ezt megelőzően a 3,6 fokos lépésüekről hallottam, ami nem is volna rossz, mert egy alkalmas féket is be kellene iktatni, ami megakadályozza a szél kőrbeforgató hatását. (A csigaáttételnél nem szükséges, mert ott a csigakerék-csigatengely az általában önzáró.)
Ott ahol a fék kialakítva volna, meg adódna egy 1:4 fogaskerék áttétel, és máris egy nagyon finom 1 foknál finomabb lépéssel forgatható antenna hajtásom lenne.
Persze az egészhez megfelelő teljesítményű motor kellene, amivel az antenna szerkezet tömegét (cca 25 kg) megbízhatóan meg is lehet fogni. (persze jól kiegyensúlyozva.)
Nos, ha nem offolok, kérem ötleteiteket.
Amennyiben zavaró kérem írjátok magánban a
farkasgy247@freemail.hu mélcímre a hsz.-t.
Köszönetem: Gyuri
(Vagy persze ide várnám leginkább.)
"Újfiú" vagyok a fórumon, így kérem, hogy kérdéseimet eként kezeljétek.
Olvasgattam is pár oldalt visszafelé, de sajna nem kaptam a kérdésemre egyértelmű választ a sok hsz. olvasása után.
Rádió-amatőr vagyok, és a hobbynk egyik fő darabja az antenna, annak is általában a kőrbeforgatható változata. Vannak ugyan gyári készítésű berendezések direkt erra a célra, amik általában egy önzáró csiga-áttételes mechanizmus, amit távvezérelten általában egy törpefeszültségű villanymotorral forgatja kőrbe, 0-360-fokos szögben az antennát. Eléggé bonyolult mechanika, meglehetősen könnyen meghibásodó kivitelben, mivel az időjárás viszontagságának nagyon ki van téve.
Felvetődött egyik amatőrtársam gondolata, hogy a forgatást meg lehetséges-e valósítani un. léptető-motorral?
Olvasgatom itt a hsz.-k között, hogy ma már egész finom, 0,9 fokos lépésekben is lehet léptető motorokat beszerezni.
Jómagam még csak ezt megelőzően a 3,6 fokos lépésüekről hallottam, ami nem is volna rossz, mert egy alkalmas féket is be kellene iktatni, ami megakadályozza a szél kőrbeforgató hatását. (A csigaáttételnél nem szükséges, mert ott a csigakerék-csigatengely az általában önzáró.)
Ott ahol a fék kialakítva volna, meg adódna egy 1:4 fogaskerék áttétel, és máris egy nagyon finom 1 foknál finomabb lépéssel forgatható antenna hajtásom lenne.
Persze az egészhez megfelelő teljesítményű motor kellene, amivel az antenna szerkezet tömegét (cca 25 kg) megbízhatóan meg is lehet fogni. (persze jól kiegyensúlyozva.)
Nos, ha nem offolok, kérem ötleteiteket.
Amennyiben zavaró kérem írjátok magánban a
farkasgy247@freemail.hu mélcímre a hsz.-t.
Köszönetem: Gyuri
(Vagy persze ide várnám leginkább.)
Cím: Re:Léptetőmotor
Írta: ebalint Dátum 2008 szeptember 22, 16:54
Írta: ebalint Dátum 2008 szeptember 22, 16:54
Mivel az 5 fäzisú motorok "vezérlő nélkül" árválkodtak mindenkinél /tudtommal/, így továbbra is csak a virtuális képzelődés maradt.
A 2 db motor továbbra is maradt a birtokomban, nem túl nagy teljesítményűek, de szívesen csinálnék egyszer hozzájuk egy egyszerű vezérlőt.
A magam részéről természetesen örülök annak, hogy tényleg van egy "rendes" léptetőd.
Remélhető, hogy élőben is látjuk?
Üdv, ebalint
A 2 db motor továbbra is maradt a birtokomban, nem túl nagy teljesítményűek, de szívesen csinálnék egyszer hozzájuk egy egyszerű vezérlőt.
A magam részéről természetesen örülök annak, hogy tényleg van egy "rendes" léptetőd.
Remélhető, hogy élőben is látjuk?
Üdv, ebalint
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2008 szeptember 22, 18:49
Írta: Szalai György Dátum 2008 szeptember 22, 18:49
Üdvözöllek Farkas György! Jó lenne, ha előbb Te segítenél nekem!
„offolok” Több fórumon is találkoztam már ezzel a kifejezéssel. Van ahol gyakran élnek vele, szerencsémre itt alig. Mit kell ez alatt érteni. Mert én nem értem. Miért írjátok ezt?
Elektronikához értő rádióamatőr létedre, gondolom nem a léptetőmotor vezérlésének elkészítése jelent számodra problémát. Pláne, hogy egy antennaforgató esetében, a gyorsulási lassulási érték sem kritikus, talán egyedül a beállási pontosság.
Ha az antennaforgatóban csigakerék áttételt alkalmazol, akkor kottyanós lesz, ami a beállási pontosságot is nagyon korlátozza. A kottyanáson belül rángatja a szél, ettől gyorsan tönkremegy a csigakerék. Vagy beépíthetsz kissé bonyolultabb és jóval drágább kottyanásmentes csigaáttételt. Hogy mennyire számit neked például egy fok szöghiba az antenna beállításában, arról nekem nincs fogalmam.
Azt a problémádat, hogy az időjárási körülményeknek kitett szerkezetet, viszonylag hamar tönkreteszi az időjárás, nem oldja meg a léptetőmotor sem. A szerkezetet meg kell védeni, kellően burkolni, tömíteni. Akár teljesen feltölthető olajjal, akkor szinte örökéletű lesz. Azt nem is merem ajánlani, hogy korrózióálló anyagokból, ipari műanyagokból készítsd, mert lehet, hogy többe fog kerülni az antennaforgató, mint az antennára kapcsolt rádiók.
Írásodban nem alkalmaztál egyetlen kérdőjelet sem, ezért nem tudom mire vagy kíváncsi, miben kérsz ötleteket. Kérlek, tegyél fel kérdéseket, mert így fogalmam nincs, mire kéne válaszoljak, és tudok-e egyáltalán. De már kíváncsi vagyok, hogy mire is vagy kíváncsi.
„offolok” Több fórumon is találkoztam már ezzel a kifejezéssel. Van ahol gyakran élnek vele, szerencsémre itt alig. Mit kell ez alatt érteni. Mert én nem értem. Miért írjátok ezt?
Elektronikához értő rádióamatőr létedre, gondolom nem a léptetőmotor vezérlésének elkészítése jelent számodra problémát. Pláne, hogy egy antennaforgató esetében, a gyorsulási lassulási érték sem kritikus, talán egyedül a beállási pontosság.
Ha az antennaforgatóban csigakerék áttételt alkalmazol, akkor kottyanós lesz, ami a beállási pontosságot is nagyon korlátozza. A kottyanáson belül rángatja a szél, ettől gyorsan tönkremegy a csigakerék. Vagy beépíthetsz kissé bonyolultabb és jóval drágább kottyanásmentes csigaáttételt. Hogy mennyire számit neked például egy fok szöghiba az antenna beállításában, arról nekem nincs fogalmam.
Azt a problémádat, hogy az időjárási körülményeknek kitett szerkezetet, viszonylag hamar tönkreteszi az időjárás, nem oldja meg a léptetőmotor sem. A szerkezetet meg kell védeni, kellően burkolni, tömíteni. Akár teljesen feltölthető olajjal, akkor szinte örökéletű lesz. Azt nem is merem ajánlani, hogy korrózióálló anyagokból, ipari műanyagokból készítsd, mert lehet, hogy többe fog kerülni az antennaforgató, mint az antennára kapcsolt rádiók.
Írásodban nem alkalmaztál egyetlen kérdőjelet sem, ezért nem tudom mire vagy kíváncsi, miben kérsz ötleteket. Kérlek, tegyél fel kérdéseket, mert így fogalmam nincs, mire kéne válaszoljak, és tudok-e egyáltalán. De már kíváncsi vagyok, hogy mire is vagy kíváncsi.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 szeptember 22, 19:18
Írta: 3k74cecek Dátum 2008 szeptember 22, 19:18
"offolok"= nem a fórum témájába vágó dologról ír/kérdez.
Ha válaszként írja valaki, hogy ez "off", akkor ezt a tény veti a kérdező szemére.
Más (és nem csak neked, hanem Farkas Gy.nekis):
Nem nagy dolog kottyanásmentes csigahajtást csinálni. Nem sokkal bonyolultabb és drágább.
Szerintem célszerűbb is csigahajtást használni mert akkor nem kell féket csinálni.
Nem hiszem, hogy 5 sec alatt kellene az antennát 180 fokkal elforgatni, így egy pimfli 1A-es 200 lépéses léptető tökéletesen megfelelne. Ilyet meg fillérekért lehet kapni.
Azt antennát megfelelően kell megcsapágyazni, azt nem a motorra kell bízni.
Részletesebbet csak akkor lehet mondani ha valamit már tudunk az antenna méreteiről, elhelyezéséről, stb.
Ha válaszként írja valaki, hogy ez "off", akkor ezt a tény veti a kérdező szemére.
Más (és nem csak neked, hanem Farkas Gy.nekis):
Nem nagy dolog kottyanásmentes csigahajtást csinálni. Nem sokkal bonyolultabb és drágább.
Szerintem célszerűbb is csigahajtást használni mert akkor nem kell féket csinálni.
Nem hiszem, hogy 5 sec alatt kellene az antennát 180 fokkal elforgatni, így egy pimfli 1A-es 200 lépéses léptető tökéletesen megfelelne. Ilyet meg fillérekért lehet kapni.
Azt antennát megfelelően kell megcsapágyazni, azt nem a motorra kell bízni.
Részletesebbet csak akkor lehet mondani ha valamit már tudunk az antenna méreteiről, elhelyezéséről, stb.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 szeptember 22, 19:35
Írta: 000000000 Dátum 2008 szeptember 22, 19:35
Üdvözöllek a fórumon! Szép hobbi a rádió-amatőrködés, és a léptetőmotor vezérlés is. De nem feltétlen kell a kettőt összekapcsolni. Az antennád gondolon RH vagy URH Yagi. Ha a sugárzási karakterisztikáját megnézed, láthatod, hogy néhány fok irányeltérés vastagon elhanyagolható. Tehát a 0,9 fokos beállás verébre ágyúval. A forgatáshoz pedig jelentős nyomaték kell pl lejegesedett hajtás, vagy oldalszél esetén. Szóval használd nyugodtan a jól bevált (hivatalból) önzáró csigahajtást. Praktikusan kettőt egymás után, mert a teljes körülfordulás ideje nagy méretek esetén a perc nagyságrendbe kell hogy legyen. A visszajelzést egy helipottal és néhány alkatrésszel egyszerűen megoldhatod. Olvasd el az RT 2007/9 és 2008/1 cikkeit a TA-19 katonai antennaforgató átalakításáról. Magánban pedig küldök néhány képet a cikkben szereplő 16 méter magasan lévő négyelemes antenna forgatójáról.
Üdv: Rabb Ferenc
Üdv: Rabb Ferenc
Cím: Re:Léptetőmotor
Írta: wrfwxv4t9 Dátum 2008 szeptember 22, 19:46
Írta: wrfwxv4t9 Dátum 2008 szeptember 22, 19:46
Üdv Kedves "Drusza"!
Nos, az én érdeklődésem azért "off" kissé itt, mert nem egészen abba a témakőrbe tartozik, amiket itt megbeszéltek. Ezért szokás, hogy az eberfia "kikapcsolás"-sal jelzi, hogy mondanivalja az ő tudta szerint sem oda való, de szeretné ha a jobb értés okán mégiscsak válaszolnának rá. Nos, esetemben én is a léptetőmotor után érdeklődök, de nekem nem szerszámgép nagyon precíz 3D-s vezérlése a célom, hanem egy egyszerű forgatás. :-)
A vezérlés, és az elektronika elkészítése nem okoz gondot. Alapképzettségem okán (gépésztechnikus) a mechanikai megoldások sem, vagyis egy csigahajtást is kellő precizitással szinte kotyogásmentessé lehet tenni, legalább is annyira, hogy az elhanyagolható az iránybaálláshoz. (Az antenna sugárzási iránykarakterisztikája nagyságrenddel nagyobb.)
A kotyogás esetlegesen a szél okozta lengetés miatt fontos, mert hamar törést szenved, valami! :-( Ezt nagyon jól látod előre.
Azt is olvasgattam itt a CNC téma körűl, hogy vannak nagyon jó "kotyogásmentes" hajtóművek a léptetőmotorok után, és nagyon kíváncsi lennék, miként lehetne adoptálni az antennaforgatásnál. Stb....
Elsősorban szeretnék Tőletek nyomravezető leírások helyeit megkapni ahol hajtásmegoldások vannak ismertetve, stb...Nagyon megköszönném!
És azért várnák jótanácsot arra is, hogy milyen elektronikát építsek meg hozzá.
Talán első nekifutásra ez a két kérésem lenne. Az elkészítéséhez meg remélem van még bőven időm. Az egész tél előttem áll! :-))
Köszönöm.
Nos, az én érdeklődésem azért "off" kissé itt, mert nem egészen abba a témakőrbe tartozik, amiket itt megbeszéltek. Ezért szokás, hogy az eberfia "kikapcsolás"-sal jelzi, hogy mondanivalja az ő tudta szerint sem oda való, de szeretné ha a jobb értés okán mégiscsak válaszolnának rá. Nos, esetemben én is a léptetőmotor után érdeklődök, de nekem nem szerszámgép nagyon precíz 3D-s vezérlése a célom, hanem egy egyszerű forgatás. :-)
A vezérlés, és az elektronika elkészítése nem okoz gondot. Alapképzettségem okán (gépésztechnikus) a mechanikai megoldások sem, vagyis egy csigahajtást is kellő precizitással szinte kotyogásmentessé lehet tenni, legalább is annyira, hogy az elhanyagolható az iránybaálláshoz. (Az antenna sugárzási iránykarakterisztikája nagyságrenddel nagyobb.)
A kotyogás esetlegesen a szél okozta lengetés miatt fontos, mert hamar törést szenved, valami! :-( Ezt nagyon jól látod előre.
Azt is olvasgattam itt a CNC téma körűl, hogy vannak nagyon jó "kotyogásmentes" hajtóművek a léptetőmotorok után, és nagyon kíváncsi lennék, miként lehetne adoptálni az antennaforgatásnál. Stb....
Elsősorban szeretnék Tőletek nyomravezető leírások helyeit megkapni ahol hajtásmegoldások vannak ismertetve, stb...Nagyon megköszönném!
És azért várnák jótanácsot arra is, hogy milyen elektronikát építsek meg hozzá.
Talán első nekifutásra ez a két kérésem lenne. Az elkészítéséhez meg remélem van még bőven időm. Az egész tél előttem áll! :-))
Köszönöm.
Cím: Re:Léptetőmotor
Írta: wrfwxv4t9 Dátum 2008 szeptember 22, 20:06
Írta: wrfwxv4t9 Dátum 2008 szeptember 22, 20:06
Üdv Imi!
Válaszodból lejön, hogy ismered a hobbym lényegi részét, sőt: Ha a Rádiótechnika újságunkat idézed, akkor egészen jó az ismerettséged! :-)
Valóban, ahogy írod az antennák iránykarakterisztikája nem nagyon indokol iljen pontosságú iránybaállást FÖLDI öszzeköttetéseknél. Viszont ha az emberfia mondjuk műholdon keresztűl beszélget mikrohullámon Amerikával.... :-)
Vagy EME (Föld-Hold-Föld)összeköttetést csinál.
Arról nem beszélve, hogy iljen esetben már eleválásra is szükség van. Azaz az antennát már egy másik dimenzióban is kell mozgasd.
Namármost, ha léptetőmotoros a forgatás, és annak a lépésenkénti elfordulása "gyárilag adott" akkor visszajelzésre sincs szükség.
Az igért képeket köszönöm!
Válaszodból lejön, hogy ismered a hobbym lényegi részét, sőt: Ha a Rádiótechnika újságunkat idézed, akkor egészen jó az ismerettséged! :-)
Valóban, ahogy írod az antennák iránykarakterisztikája nem nagyon indokol iljen pontosságú iránybaállást FÖLDI öszzeköttetéseknél. Viszont ha az emberfia mondjuk műholdon keresztűl beszélget mikrohullámon Amerikával.... :-)
Vagy EME (Föld-Hold-Föld)összeköttetést csinál.
Arról nem beszélve, hogy iljen esetben már eleválásra is szükség van. Azaz az antennát már egy másik dimenzióban is kell mozgasd.
Namármost, ha léptetőmotoros a forgatás, és annak a lépésenkénti elfordulása "gyárilag adott" akkor visszajelzésre sincs szükség.
Az igért képeket köszönöm!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 szeptember 22, 21:11
Írta: 000000000 Dátum 2008 szeptember 22, 21:11
Abban kétségtelen igazad van, hogy a műholdkövetés mikrohullámon már egy más világ. Itt az előbb említett 0,9 fok eltérés már azt jelentheti, hogy megszűnt az összeköttetés. Itt valóban indokolt a precíz és robosztus mechanika (kottyanásmentes csiga, vagy HD) valamint léptető vagy szervomotor. A vezérlést pedig vagy a műhold minden időpillanatban pontosan ismert helyzetéből, vagy az antenna mechanikus vagy elektronikus "csóválásából" kell létrehoznod A és E síkban.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 szeptember 23, 11:54
Írta: 000000000 Dátum 2008 szeptember 23, 11:54
A #1567-ben lévő e-mail címedről lepattantam, mint lavórról a zománc
Cím: Re:Léptetőmotor
Írta: wrfwxv4t9 Dátum 2008 szeptember 23, 12:30
Írta: wrfwxv4t9 Dátum 2008 szeptember 23, 12:30
Elnézést, én a BÉNA....!
farkas247@freemail.hu
(Az első nekifutásban van egy "gyö"-vel több....
[#falbav]
farkas247@freemail.hu
(Az első nekifutásban van egy "gyö"-vel több....
[#falbav]
Cím: Re:Léptetőmotor
Írta: wrfwxv4t9 Dátum 2008 szeptember 24, 13:12
Írta: wrfwxv4t9 Dátum 2008 szeptember 24, 13:12
Üdv Barátim!
Ezerrel kutakodok a témában. Sajna az információ csak csurran-cseppen, elsősorban megfelelő motor beszerzésileg. No, eljutottam oda, hogy tán közelebb kerülök a témához, ha gyakorlatban ismerkedek a dologgal. Ahogy "Szigma" tanácsolta keresnék valami félredobott őskövületet. Jobb volna inkább kicsinyt erősebb, sacperkábé 12V/1.5-2.0 A-os, és megtenné a 3.6 fokos lépésű is. Sőt! Mivel a lépés osztódik az áttétellel...
Bocs, ha ezt inkább az adok-veszek kellet volna írnom...
Leginkább azért ide írtam, mert találtam ezt a linket:
http://dbudai.fpn.hu/_dwad_/frameset.php?path=http://dbudai.fpn.hu/
Próbálkozott már valaki a Topiktársak közül hasonlóan a temával? Az Úr, aki elindította a dolgot sajna nem publikálta tovább..... (2006-ban frissült a honlapja utolján...)
Ezerrel kutakodok a témában. Sajna az információ csak csurran-cseppen, elsősorban megfelelő motor beszerzésileg. No, eljutottam oda, hogy tán közelebb kerülök a témához, ha gyakorlatban ismerkedek a dologgal. Ahogy "Szigma" tanácsolta keresnék valami félredobott őskövületet. Jobb volna inkább kicsinyt erősebb, sacperkábé 12V/1.5-2.0 A-os, és megtenné a 3.6 fokos lépésű is. Sőt! Mivel a lépés osztódik az áttétellel...
Bocs, ha ezt inkább az adok-veszek kellet volna írnom...
Leginkább azért ide írtam, mert találtam ezt a linket:
http://dbudai.fpn.hu/_dwad_/frameset.php?path=http://dbudai.fpn.hu/
Próbálkozott már valaki a Topiktársak közül hasonlóan a temával? Az Úr, aki elindította a dolgot sajna nem publikálta tovább..... (2006-ban frissült a honlapja utolján...)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 szeptember 24, 15:55
Írta: 000000000 Dátum 2008 szeptember 24, 15:55
Ha antenna forgatót akarsz, akkor néhány dolgot azért tisztázni kellene, mielőtt valami irdatlan nagy nyomatékú léptető motort szereznél be, vagy készítenél.
Fékezésre, reteszelésre szükséged lesz, hogy a szerkezet kikapcsolt állapotában a szél ne tudja szabadon forgatni az antennádat.
Mivel nem helikopterről van szó, úgy saccolom elég lehet, ha csak kb. 30 másodperc alatt tesz meg egy körülfordulást. Ha a motor maximális fordulatszámát 600 RPM -nek vesszük, ez azt jelenti, hogy 1:300 -as áttétellel még mindig jók vagyunk. Ilyen áttétel esetén (bár nem tudom mekkora az antennád tömege) úgy gondolom egy 1-2 Nm -es motor bőven elegendő. Ha már megvan az áttételed (célszerűen valami combos csigaáttétel) akkor lehet, hogy ki fog derülni, hogy nem is kell léptetőmotor, meg a hozzá kapcsolódó vezérlő áramkör, hanem elég egy egyszerű DC motor, meg egy jobbra-balra kapcsoló és inkább a pozíció visszajelzésre kellene helyezni a nagyobb figyelmet.
Fékezésre, reteszelésre szükséged lesz, hogy a szerkezet kikapcsolt állapotában a szél ne tudja szabadon forgatni az antennádat.
Mivel nem helikopterről van szó, úgy saccolom elég lehet, ha csak kb. 30 másodperc alatt tesz meg egy körülfordulást. Ha a motor maximális fordulatszámát 600 RPM -nek vesszük, ez azt jelenti, hogy 1:300 -as áttétellel még mindig jók vagyunk. Ilyen áttétel esetén (bár nem tudom mekkora az antennád tömege) úgy gondolom egy 1-2 Nm -es motor bőven elegendő. Ha már megvan az áttételed (célszerűen valami combos csigaáttétel) akkor lehet, hogy ki fog derülni, hogy nem is kell léptetőmotor, meg a hozzá kapcsolódó vezérlő áramkör, hanem elég egy egyszerű DC motor, meg egy jobbra-balra kapcsoló és inkább a pozíció visszajelzésre kellene helyezni a nagyobb figyelmet.
Cím: Re:Léptetőmotor
Írta: wrfwxv4t9 Dátum 2008 szeptember 24, 17:06
Írta: wrfwxv4t9 Dátum 2008 szeptember 24, 17:06
Üdv "Molinari"!
Köszönöm tanácsaid.
Nos, a tervben szereplő dolgok: A hajtás mechanikában van egy 72:1 -hez csigahajtás. Ez egy adott, meglévő "fájin" áttétel. (Igen finom :-) ) Ez biztosítja az egész mechanizmus fékezését is, mivel a csigahajtás önzáró. A megforgatandó tömeg, -mivel csoportantennákról van szó, ami 2x4 antennát jelent- kb 22-24 kg. Ugyan jól kiegyensújozott lészen a konstrukció, de nagyon megjegyeztem azt az intelmet, hogy pölö lefagyásra is gondoljak. Vagyis erőre szükségem vagyon.
Az idő ami alatt a szokásos forgatók körbeforgatják az antennarendszert nagyon megfelelő, ha egy perc körűl vannak.
A léptetőmotornak a forgatóként való alkalmazása azért lenne teljesen újszerű, mert ha motor pontos beállása mellé párosulna a kotyogásmentes hajtómű (ami fék is) elhagyhatóvá válna a visszajelző bonyolultsága.
Azt a megoldást ami a "combos" csigaáttételt, és a DC motor kombinációjából van, azt gyakorlom. Vagyis már néhány példánya működik az általam is készített megoldásoknak egy katonai rádió antenna toronynak a forgatójánál, aholis az eredeti lánchajtást kiváltottam egy 12 V-os gk. ablaktörlő motornak az alkalmazásával. Sajna fotót nem tudok ide feltenni, ill. feltölteni, de annak aki szeret böngészni más témájú topikon, imhol a link ahol szerepel:
http://forum.hasix.org/smf/index.php?topic=1680.msg14936;topicseen#new
Ha visszalépsz pár oldalt az eleje felé, megtalálod a megoldásom fényképét valamelik hsz.-emnél.
Köszönöm tanácsaid.
Nos, a tervben szereplő dolgok: A hajtás mechanikában van egy 72:1 -hez csigahajtás. Ez egy adott, meglévő "fájin" áttétel. (Igen finom :-) ) Ez biztosítja az egész mechanizmus fékezését is, mivel a csigahajtás önzáró. A megforgatandó tömeg, -mivel csoportantennákról van szó, ami 2x4 antennát jelent- kb 22-24 kg. Ugyan jól kiegyensújozott lészen a konstrukció, de nagyon megjegyeztem azt az intelmet, hogy pölö lefagyásra is gondoljak. Vagyis erőre szükségem vagyon.
Az idő ami alatt a szokásos forgatók körbeforgatják az antennarendszert nagyon megfelelő, ha egy perc körűl vannak.
A léptetőmotornak a forgatóként való alkalmazása azért lenne teljesen újszerű, mert ha motor pontos beállása mellé párosulna a kotyogásmentes hajtómű (ami fék is) elhagyhatóvá válna a visszajelző bonyolultsága.
Azt a megoldást ami a "combos" csigaáttételt, és a DC motor kombinációjából van, azt gyakorlom. Vagyis már néhány példánya működik az általam is készített megoldásoknak egy katonai rádió antenna toronynak a forgatójánál, aholis az eredeti lánchajtást kiváltottam egy 12 V-os gk. ablaktörlő motornak az alkalmazásával. Sajna fotót nem tudok ide feltenni, ill. feltölteni, de annak aki szeret böngészni más témájú topikon, imhol a link ahol szerepel:
http://forum.hasix.org/smf/index.php?topic=1680.msg14936;topicseen#new
Ha visszalépsz pár oldalt az eleje felé, megtalálod a megoldásom fényképét valamelik hsz.-emnél.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 szeptember 25, 08:59
Írta: 000000000 Dátum 2008 szeptember 25, 08:59
Ha léptetőmotorral akarsz pozícionálni, akkor olyan elektronikára lesz szükséged, ami a vagy megőrzi az utolsó állapotát kikapcsoláskor is, vagy minden bekapcsoláskor újra egy referenciapontra kell menned. Én mégis inkább a pontos pozíció visszajelzésből indulnék ki, mégpedig a következő módon: Egy potméter a tengelyen, ami egy négyszög jel kitöltési tényezőjét állítja. Ez a jel egy csavart érpáron gyönyörűen szállítható, és máris van egy analóg abszulót jeladód. Esetleg még a hőmérséklet kompenzációra kell odafigyelni, de az is megoldható.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 szeptember 26, 01:16
Írta: 3k74cecek Dátum 2008 szeptember 26, 01:16
Izlések és pofonok...
Én inkább olyan megoldást csinálnék ami megőrzi a kikapcsoláskori poziciót. Így még vissza sem kell madzagolni a pozició jelet. Az általad ajánlott pozició visszajelzést ugyanis sokkal macerásabb megfelelően pontosra megcsinálni.
Én inkább olyan megoldást csinálnék ami megőrzi a kikapcsoláskori poziciót. Így még vissza sem kell madzagolni a pozició jelet. Az általad ajánlott pozició visszajelzést ugyanis sokkal macerásabb megfelelően pontosra megcsinálni.
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2008 szeptember 26, 08:00
Írta: Motoros Dátum 2008 szeptember 26, 08:00
A régi Hirschman antennaforgató is valami ilyesmi potméteres egyszerű megoldást tartalmazott. Hasonló van is ITTEN eladó. Ezek a viszonylag egyszerű szerkezetek is nagyon megbízhatóak voltak (önzáró és semmi kotty).
A mindenre jó ablaktörlő motorból is készűltek parabola forgatók ahol egy forgó anya tolta ki be a metrikus menetes szálat. Itt nem volt semmi visszajelzés, pontosabban a képen látta a dolgozó hogy hol áll az antenna.
A mindenre jó ablaktörlő motorból is készűltek parabola forgatók ahol egy forgó anya tolta ki be a metrikus menetes szálat. Itt nem volt semmi visszajelzés, pontosabban a képen látta a dolgozó hogy hol áll az antenna.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 szeptember 26, 08:22
Írta: svejk Dátum 2008 szeptember 26, 08:22
Mivel az antennát max. 360 fokban kell forgatni, igen preciz visszacsatolást lehet csinálni egy 10 fordulatú huzal helipot-ból.
Az antenna és a poti közé egy kb. 1:8 as gyorsítóáttétel, és pl. a forgókondiknál alkalmazott kottyanásmentes kivitellel.
A potit hídba kapcsolva a hőmérsékletkompenzálás is elmaradhat.
Persze ma már nem nagy ügy szerezni egy 1-2 ezres abszulute encodert sem, viszont annak jelfeldogozása kicsit macerásabb főleg ha soros az adatátvitel..
Az antenna és a poti közé egy kb. 1:8 as gyorsítóáttétel, és pl. a forgókondiknál alkalmazott kottyanásmentes kivitellel.
A potit hídba kapcsolva a hőmérsékletkompenzálás is elmaradhat.
Persze ma már nem nagy ügy szerezni egy 1-2 ezres abszulute encodert sem, viszont annak jelfeldogozása kicsit macerásabb főleg ha soros az adatátvitel..
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2008 szeptember 26, 17:02
Írta: Kristály Árpád Dátum 2008 szeptember 26, 17:02
Hali Farkas György!
Most, hogy a Motoros...szóba hozta...rájöttem, hogy nekem van ilyen gyári forgatom...sőt kettő darabra emlékszem....Meg kell keresnem, s jelentkezem fotóval....
Halihó!
Most, hogy a Motoros...szóba hozta...rájöttem, hogy nekem van ilyen gyári forgatom...sőt kettő darabra emlékszem....Meg kell keresnem, s jelentkezem fotóval....
Halihó!
Cím: Re:Léptetőmotor
Írta: cipk5xtny Dátum 2008 október 01, 15:22
Írta: cipk5xtny Dátum 2008 október 01, 15:22
Sziasztok segitsen aki tud nem tudom azonositani a motorjaimat....
m68sp-1 12v elvileg48 omh demindenhol 33-mat láttam. mekkora a nyomatéka?
emp4233,sth-39d165,siemens 1bs2112-7ab semmit sem talállok rolluk találni..
m68sp-1 12v elvileg48 omh demindenhol 33-mat láttam. mekkora a nyomatéka?
emp4233,sth-39d165,siemens 1bs2112-7ab semmit sem talállok rolluk találni..
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 október 01, 20:32
Írta: svejk Dátum 2008 október 01, 20:32
ha tényleg 48 Ohm akkor felejtsd el...
lagalább olyan 50x50x50 mm köbtartalmút keress..
Villamos adatok pedig 1-2 A körül kb, 1-6 Ohm tekercsellenállás
a te adataiddal a direkthajtás felejtős..
lagalább olyan 50x50x50 mm köbtartalmút keress..
Villamos adatok pedig 1-2 A körül kb, 1-6 Ohm tekercsellenállás
a te adataiddal a direkthajtás felejtős..
Cím: Re:Léptetőmotor
Írta: cipk5xtny Dátum 2008 október 01, 21:12
Írta: cipk5xtny Dátum 2008 október 01, 21:12
ez esetben mekkora áttételt tegyek??
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 október 01, 21:20
Írta: svejk Dátum 2008 október 01, 21:20
lökj egy képet arról a motorról, mert mint írtam szerintem felejtős..
Gyere el egy hónap múlva a CNC találkozóra és egy zsák fasza léptetőmotorral mehetsz haza olcsón...
Gyere el egy hónap múlva a CNC találkozóra és egy zsák fasza léptetőmotorral mehetsz haza olcsón...
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 október 01, 21:26
Írta: svejk Dátum 2008 október 01, 21:26
Pl. egy ilyennel akár 4mm emelkedésű trapézorsót is hajthatsz direktben..
ez egy középkategóriásnak mondható
ez egy középkategóriásnak mondható
Cím: Re:Léptetőmotor
Írta: cipk5xtny Dátum 2008 október 01, 21:29
Írta: cipk5xtny Dátum 2008 október 01, 21:29
találtam olyan motort ami 11 ill.18ohm-osak .viszont lehet hogy 24 v-os.
nyomtatoban volt
nyomtatoban volt
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 október 01, 21:35
Írta: svejk Dátum 2008 október 01, 21:35
írd már körbe a méreteit legalább...
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 október 01, 21:36
Írta: svejk Dátum 2008 október 01, 21:36
De ha megnézed baloldalt a gépeket(mechanikák), látod kb. melyikre mekkora való...
Cím: Re:Léptetőmotor
Írta: cipk5xtny Dátum 2008 október 01, 21:43
Írta: cipk5xtny Dátum 2008 október 01, 21:43
38x38x30 tengely 4mm ez az 11om
Cím: Re:Léptetőmotor
Írta: cipk5xtny Dátum 2008 október 01, 21:44
Írta: cipk5xtny Dátum 2008 október 01, 21:44
csk nyákrajzolásra kell a gép[#lookaround]
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 október 01, 21:48
Írta: svejk Dátum 2008 október 01, 21:48
akkorával lego-t mozgatni jó esetleg...:(
látod a képemen mekkora van?
Dobj az adok-veszekbe egy hirdetést hogy keresel kb, 0,5 Nm körüli léptető mocit
kapsz biztos megfelelő ajánlatot..
amit a képen látsz (#1589) 3800Ft/db
látod a képemen mekkora van?
Dobj az adok-veszekbe egy hirdetést hogy keresel kb, 0,5 Nm körüli léptető mocit
kapsz biztos megfelelő ajánlatot..
amit a képen látsz (#1589) 3800Ft/db
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 október 01, 21:49
Írta: svejk Dátum 2008 október 01, 21:49
most még...:)
de evés közben jön az étvágy...:)
de evés közben jön az étvágy...:)
Cím: Re:Léptetőmotor
Írta: cipk5xtny Dátum 2008 október 01, 21:50
Írta: cipk5xtny Dátum 2008 október 01, 21:50
mi az ára az ilyennek??
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 október 01, 21:51
Írta: svejk Dátum 2008 október 01, 21:51
rakd össze a mechanikát és ráérsz a végén motort keresni hozzá...
az a legkevesebb gond...
A menetemelkedés a kívánt sebesség szerint legyen kiválasztva...
az a legkevesebb gond...
A menetemelkedés a kívánt sebesség szerint legyen kiválasztva...
Cím: Re:Léptetőmotor
Írta: cipk5xtny Dátum 2008 október 01, 21:52
Írta: cipk5xtny Dátum 2008 október 01, 21:52
köszi a tippet
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 november 18, 20:28
Írta: 000000000 Dátum 2008 november 18, 20:28
Az alábbi léptetőmotorok adatlapját keresném, ha valaki tudna segíteni:
EM-50
EM-42
EM-43
EM-93 (STH-39D172)
55SPM25D6F1 7,5 DEG 9 OHM
42SI-22DAWA 7,5 DEG 50 OHM JAPAN
42SI-22DAG 7,5 DEG 50 OHM JAPAN
Előre is köszönöm.
EM-50
EM-42
EM-43
EM-93 (STH-39D172)
55SPM25D6F1 7,5 DEG 9 OHM
42SI-22DAWA 7,5 DEG 50 OHM JAPAN
42SI-22DAG 7,5 DEG 50 OHM JAPAN
Előre is köszönöm.
Cím: Re:Léptetőmotor
Írta: ki005gz70 Dátum 2008 december 06, 10:06
Írta: ki005gz70 Dátum 2008 december 06, 10:06
Sziasztok !
A következő a problémám :
Egy olyan kivitelezésű hobbycnc-gépet készítettem, amiből régi mátrixnyomtatónak a kisteljesítményű léptetőmotorja a tengelyhajtó.
Ez az áttételek miatt 0.4mm tengelyelmozdulást eredményez 1 lépés alatt. Ugyan ez a mechakika-áttétel volt a nyomtatóban is, és arra gondoltam hogy nagy felbontású léptetőmotorvezérlő hajta a motort.
Szereztem is me-432 bipoláris léptetőmotrvezérlőt, ami a következő adatokkal bír:
fesz:18-40v
áram:1-3.2A
Felbontás : max 25600 lépés 200 léptek/fordulat motornél, tehát max 128 -ra tud felbontani 1 lépést.
Ez a vezérlő kiválóan is működik nekem 4.0Nm-es motorommal, viszont a kis léptetőmotorral nem.
Nem tud egyszerűen két lépés közé beállni a kellő helyre, akárhogy állítom. Csak egész lépésre ugrik. Tehát nagyfelbontásra állítva mozdulatlanul áll, és mikor elérte azt a lépésszánot, ami már a következő tekercse esik, akkor ugrik egyet, és kész. De nincsen semmi átmenet.
Amúgy egy bipolárisan kötött tekercs ellenállása 24ohm.
Kedves szakértő Urak !
MIÉRT VAN EZ ?????????
Üdv:
Gyula
A következő a problémám :
Egy olyan kivitelezésű hobbycnc-gépet készítettem, amiből régi mátrixnyomtatónak a kisteljesítményű léptetőmotorja a tengelyhajtó.
Ez az áttételek miatt 0.4mm tengelyelmozdulást eredményez 1 lépés alatt. Ugyan ez a mechakika-áttétel volt a nyomtatóban is, és arra gondoltam hogy nagy felbontású léptetőmotorvezérlő hajta a motort.
Szereztem is me-432 bipoláris léptetőmotrvezérlőt, ami a következő adatokkal bír:
fesz:18-40v
áram:1-3.2A
Felbontás : max 25600 lépés 200 léptek/fordulat motornél, tehát max 128 -ra tud felbontani 1 lépést.
Ez a vezérlő kiválóan is működik nekem 4.0Nm-es motorommal, viszont a kis léptetőmotorral nem.
Nem tud egyszerűen két lépés közé beállni a kellő helyre, akárhogy állítom. Csak egész lépésre ugrik. Tehát nagyfelbontásra állítva mozdulatlanul áll, és mikor elérte azt a lépésszánot, ami már a következő tekercse esik, akkor ugrik egyet, és kész. De nincsen semmi átmenet.
Amúgy egy bipolárisan kötött tekercs ellenállása 24ohm.
Kedves szakértő Urak !
MIÉRT VAN EZ ?????????
Üdv:
Gyula
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 06, 15:05
Írta: s7manbs8 Dátum 2008 december 06, 15:05
annak a nyomtatóból származó motornak nem sok a minimum 1A, ami a vezérlőből jön ? az adatokból ha jól látom 1 és 4A közt lehet állítani az áramerősséget, az ilyen kicsi motorok meg fél ampert se esznek.
Cím: Re:Léptetőmotor
Írta: ki005gz70 Dátum 2008 december 06, 18:52
Írta: ki005gz70 Dátum 2008 december 06, 18:52
Ha melegszik, akkor rakok rá sorosan valamit. Ez nem érdekes. De miért nem működik mikrolépéses átmenet ?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 06, 18:54
Írta: s7manbs8 Dátum 2008 december 06, 18:54
hát ha a nagyobb motorral meg ugyanebben a beállításban normálisan megy akkor érdekes a dolog
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 06, 18:56
Írta: s7manbs8 Dátum 2008 december 06, 18:56
nem tudom milyen az az elektronika, de lehet hogy figyeli az áramfelvételt és ha az nincs meg a minimális, azért nem csinmál valamit pl. ez csak egy hülye ötlet
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 06, 18:57
Írta: s7manbs8 Dátum 2008 december 06, 18:57
ötlet:
kösd sorba a nagyobb motor tekercsét a kisebbel és nézd meg hogy úgy megy e
kösd sorba a nagyobb motor tekercsét a kisebbel és nézd meg hogy úgy megy e
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 06, 18:58
Írta: s7manbs8 Dátum 2008 december 06, 18:58
habár ez hülyeség, most hirtelen bewlegondoltam, mert a nagy motornak kisócsi az ellenállása, az olyan mintha csak a kicsi motor lenne
Cím: Re:Léptetőmotor
Írta: pa0n9mw Dátum 2008 december 06, 19:51
Írta: pa0n9mw Dátum 2008 december 06, 19:51
Üdv
Az nem lehet, hogy az a motor a mechanikai kialakitása miatt eleve nem is tud féllépésre beállni?
végyé
Az nem lehet, hogy az a motor a mechanikai kialakitása miatt eleve nem is tud féllépésre beállni?
végyé
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 06, 20:29
Írta: s7manbs8 Dátum 2008 december 06, 20:29
nézd meg oszcilloszkóppal, milyen jelet kap a motorod 2 tekercse, két lépés közti állapotban, ha nem olyat kap, mint a naggyal, akkor az elektronika az oka valami módon
Cím: Re:Léptetőmotor
Írta: ki005gz70 Dátum 2008 december 07, 08:24
Írta: ki005gz70 Dátum 2008 december 07, 08:24
Meggyőződtem róla, hogy az elektronika jó !Ez biztos ! Talán valóban arról lehet szó, hogy a motor kialakítása nem engedi...nemtom...
Lehet hogy ezek a vezérlő csak 200 lépés/ford motorhoz jó ?
Nem lehet hogy az a baj, hogy ez a motor 48 lépés/fordulatos ? tehát 7.5 fokos egy lépés.
Köszi a válaszokat !
Lehet hogy ezek a vezérlő csak 200 lépés/ford motorhoz jó ?
Nem lehet hogy az a baj, hogy ez a motor 48 lépés/fordulatos ? tehát 7.5 fokos egy lépés.
Köszi a válaszokat !
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 08, 00:33
Írta: s7manbs8 Dátum 2008 december 08, 00:33
Az elektronikának tök mindegy, hogy mit köt rá az ember, ha rendelkezik a megfelelő induktív és ohmikus terheléssel, az csak a beállításnak megfelelőe ráadja a PWM jeleket abban a formában, ahogy az aktuális lépési állapotban kell. Pl. egy sima DC motor tekercsét is rá lehet kötni, meg az, hogy hány fokos egy lépés az nem lehet oka. És ez a kis motor biztos jól van bekötve az elektronikához ? Azt írod, hogy a vezérlő bipoláris. A kis motoron hány kivezetés van, vagy másik vezérlővel nem lehet kipróbálni ?
Cím: Re:Léptetőmotor
Írta: ki005gz70 Dátum 2008 december 08, 11:09
Írta: ki005gz70 Dátum 2008 december 08, 11:09
6 kivezetéses, unipolárisan 4 db 25ohm, bipolárisan 2db 50ohm-os kötéssel műxik.
Rosszulkötés kizárva, mindenhogy mértem, az biztosan jó, ezekkel a dolgokkal tisztában vagyok. 3db ilyen vezérlőm van, mind működik a 4Nm-es motorommal, az biztosan jó.
De problémát megoldottam : más kivitelezésű motorral :)
Viszont továbbra is kíváncsi vagyok miért csinálja ezt.
Ha gondolod, szívesen elpostázom a motort, ha van kedved kutakodni vele.Én feladtam, nem megy. Pedig sztem is mennie kellene elviekben mind1 hányléptekű a motor.
Rosszulkötés kizárva, mindenhogy mértem, az biztosan jó, ezekkel a dolgokkal tisztában vagyok. 3db ilyen vezérlőm van, mind működik a 4Nm-es motorommal, az biztosan jó.
De problémát megoldottam : más kivitelezésű motorral :)
Viszont továbbra is kíváncsi vagyok miért csinálja ezt.
Ha gondolod, szívesen elpostázom a motort, ha van kedved kutakodni vele.Én feladtam, nem megy. Pedig sztem is mennie kellene elviekben mind1 hányléptekű a motor.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 december 08, 11:38
Írta: svejk Dátum 2008 december 08, 11:38
Én hiszem hogy nem megy, és a motor miatt..
Régebben én is próbáltam A39xx-el mikrosteppet és nagyon rossz erdményeket értem el, és el is könyveltem magamban hogy a mikrostep csak a gyorsulás növelésére de főleg a rezonanciák kiszűrésére való.
én is azt láttam hogy a köztes állapotokat nem szeretik a motorok, lagalább is azok a mezeiek amikkel én is próbáltam. Az is tény hogy másgfajta mocival másként viselkedett.
Nálad már eleve a nagy ellenállás/induktivitás gondot okozhat esetleg, meg gondolom ezeknek az egyszerű mociknak a mágnesköre is nagyon egyszerű. Főleg amit írtál a 7,5 fokosé.
Régebben én is próbáltam A39xx-el mikrosteppet és nagyon rossz erdményeket értem el, és el is könyveltem magamban hogy a mikrostep csak a gyorsulás növelésére de főleg a rezonanciák kiszűrésére való.
én is azt láttam hogy a köztes állapotokat nem szeretik a motorok, lagalább is azok a mezeiek amikkel én is próbáltam. Az is tény hogy másgfajta mocival másként viselkedett.
Nálad már eleve a nagy ellenállás/induktivitás gondot okozhat esetleg, meg gondolom ezeknek az egyszerű mociknak a mágnesköre is nagyon egyszerű. Főleg amit írtál a 7,5 fokosé.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 08, 12:41
Írta: s7manbs8 Dátum 2008 december 08, 12:41
MasterGY !
Azt hiszem rájöttem, miért nem megy neked azzal a vezérlővel ez a motor.
Az az oka, hogy mikrolépéses módban, a tekercsek a vezérlő által beállított gerjesztőáramnak valahány százalékát, pl. 20% és 70% -ot kapnak.
Most olyan állapotot írok, mikor két egész lépés közt van. De mivel a vezérlő minimális árama 1A az adatok szerint, a tekercseden nem is tud folyni annyi, így az áramfigyelő nem tud úgy működni, és pl. nála lehet a 20 % is 100%-ként fog működni, mert nem tudja szabályozni az áramot, nem tudja megkülönböztetni az áramerősségszinteket. Erről lehetne egy rajzot is csinálni. Az a lényeg, hogy mind a vezérlő, mind a motor is jó, csak az a tipusú vezérlő ezzel a motorral nem fog így menni. Ha műterheléssel pótolni lehetne a tekercsekkel párhuzamosan a hiányzó áramot, az meg azért nehéz, mert a motor mozgása közben változik az induktivitása is, de pl. ha van ilyen motorod még több azok tekercseinek párhuzamos kötésével meg lehetne nézni, kisérletképpen, csak az a lényeg, hogy az egy ampert érje el legalább a gerjesztőáramaik csúcsértéke együttesen.
Illetve egy megoldás lehet működne, annyi, hogy az áramfigyelő ellenállások, amik pl. 0.22 Ohm, vagy ebben nem tudom milyenek vannak, azt ki lehet cserélni, pl. 0.47 vagy 0.68 Ohm értékűre, így a beállítható minimális áram 1A helyett arányosan lecsökkenthető, a két ellenállás arányában. Ha tudsz fényképet csinálni a vezérlődről, meg a motorról, azon meg lehet látni, melyik alkatrészek ezek.
Sőt ez másoknak is tanulságul szolgálhat.
Egyszerűen mondva, az motornak nem felel meg a vezérlő által kivánt paramétereknek.
Azt hiszem rájöttem, miért nem megy neked azzal a vezérlővel ez a motor.
Az az oka, hogy mikrolépéses módban, a tekercsek a vezérlő által beállított gerjesztőáramnak valahány százalékát, pl. 20% és 70% -ot kapnak.
Most olyan állapotot írok, mikor két egész lépés közt van. De mivel a vezérlő minimális árama 1A az adatok szerint, a tekercseden nem is tud folyni annyi, így az áramfigyelő nem tud úgy működni, és pl. nála lehet a 20 % is 100%-ként fog működni, mert nem tudja szabályozni az áramot, nem tudja megkülönböztetni az áramerősségszinteket. Erről lehetne egy rajzot is csinálni. Az a lényeg, hogy mind a vezérlő, mind a motor is jó, csak az a tipusú vezérlő ezzel a motorral nem fog így menni. Ha műterheléssel pótolni lehetne a tekercsekkel párhuzamosan a hiányzó áramot, az meg azért nehéz, mert a motor mozgása közben változik az induktivitása is, de pl. ha van ilyen motorod még több azok tekercseinek párhuzamos kötésével meg lehetne nézni, kisérletképpen, csak az a lényeg, hogy az egy ampert érje el legalább a gerjesztőáramaik csúcsértéke együttesen.
Illetve egy megoldás lehet működne, annyi, hogy az áramfigyelő ellenállások, amik pl. 0.22 Ohm, vagy ebben nem tudom milyenek vannak, azt ki lehet cserélni, pl. 0.47 vagy 0.68 Ohm értékűre, így a beállítható minimális áram 1A helyett arányosan lecsökkenthető, a két ellenállás arányában. Ha tudsz fényképet csinálni a vezérlődről, meg a motorról, azon meg lehet látni, melyik alkatrészek ezek.
Sőt ez másoknak is tanulságul szolgálhat.
Egyszerűen mondva, az motornak nem felel meg a vezérlő által kivánt paramétereknek.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 08, 12:46
Írta: s7manbs8 Dátum 2008 december 08, 12:46
Annak a kicsi léptetőmotornak kb. 0.20-0.3A az áramszükséglete így az adatok alapján. Lehet nekem is van ilyen motorom, van elég sokfélém ilyen kicsikből. Ezek 5-10V-osak, tehát kb. 10V/50Ohm=0.2A.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 08, 12:49
Írta: s7manbs8 Dátum 2008 december 08, 12:49
Egész lépésben meg azért tud működni, mert ott csak egy tekercs kap pl. áramot egyszerre, és mindegy, hogy a csúcsáramot hoigy állítod be, mert azt vagy a a soros ellenállás korlátod állítja be, vagy a maximális tápfeszed, ha kisebb tápot használsz, pl. 12V-ot. Tehát ez is érthető.
Cím: Re:Léptetőmotor
Írta: moly Dátum 2008 december 12, 09:06
Írta: moly Dátum 2008 december 12, 09:06
Üdv!
Végig olvastam rengeteg fórumot, hátha találok választ a kérdésre, de most mégis írásra adtam a fejem. A problémám hasonló az előzőhöz. Megépítettem EZT a vezérlőt.
StepSun 1.35A os 6 kivezetéses unipol. motort szeretnék róla járatni de valamiért a pwm nem akar érvényesülni benne.
Álló helyzetben nagyon felszökik az áram és a potival sem lehet lejjebb tekerni. Ha változtatom a feszültséget akkor az áram erősség is változik vele együtt. Az áramerősség állító potit is hiába tekerem nem lehet lejjebb venni az áramot.Bár a sípoló hang magassága is változik de még sem történik semmi. Egyébként rendesen forog a motor egész és mikro lépésekben is. Elképzelhető hogy kicsi hozzá ez a motor? Nem lehetne hozzá hangolni valahogy a vezérlőt? Ha a "sense" ellenállásokat
kicseréltem 30 ohmosra akkor működött a pwm mert
bármekkora fesznél és fordulatnál 0.3 A-on tartotta az áramot. Viszont ekkor a potit hiába tekergettem nem reagált rá semmit a vezérlő.
Próbáltam 1 és 15 ohmmal is de akkor is vagy egyik vagy másik jelenség jött elő . Megbuktam...[#szomoru1]
Ha valakinek lenne ötlete megköszönném.
Végig olvastam rengeteg fórumot, hátha találok választ a kérdésre, de most mégis írásra adtam a fejem. A problémám hasonló az előzőhöz. Megépítettem EZT a vezérlőt.
StepSun 1.35A os 6 kivezetéses unipol. motort szeretnék róla járatni de valamiért a pwm nem akar érvényesülni benne.
Álló helyzetben nagyon felszökik az áram és a potival sem lehet lejjebb tekerni. Ha változtatom a feszültséget akkor az áram erősség is változik vele együtt. Az áramerősség állító potit is hiába tekerem nem lehet lejjebb venni az áramot.Bár a sípoló hang magassága is változik de még sem történik semmi. Egyébként rendesen forog a motor egész és mikro lépésekben is. Elképzelhető hogy kicsi hozzá ez a motor? Nem lehetne hozzá hangolni valahogy a vezérlőt? Ha a "sense" ellenállásokat
kicseréltem 30 ohmosra akkor működött a pwm mert
bármekkora fesznél és fordulatnál 0.3 A-on tartotta az áramot. Viszont ekkor a potit hiába tekergettem nem reagált rá semmit a vezérlő.
Próbáltam 1 és 15 ohmmal is de akkor is vagy egyik vagy másik jelenség jött elő . Megbuktam...[#szomoru1]
Ha valakinek lenne ötlete megköszönném.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 12, 13:32
Írta: s7manbs8 Dátum 2008 december 12, 13:32
hány volt a tápja ? pl. 12V-tal már mennie kell szépen, ha pl. 3-400 as fordulat/perccel járatod
a motor tekercseit jól kell bekötni !
ha sípoló hangot hallassz az már túl nagy áram, olyankor leesik a frekvencia azért hallható
a sense ellenállások értéke egy ekkora motor esetén a 0.2 Ohm helyes érték, nem az az oka
a megépített panelt ellenőrizd végig, nincs e valahol rossz alkatrész, vagy forrasztás összeérve
a motor tekercseit jól kell bekötni !
ha sípoló hangot hallassz az már túl nagy áram, olyankor leesik a frekvencia azért hallható
a sense ellenállások értéke egy ekkora motor esetén a 0.2 Ohm helyes érték, nem az az oka
a megépített panelt ellenőrizd végig, nincs e valahol rossz alkatrész, vagy forrasztás összeérve
Cím: Re:Léptetőmotor
Írta: moly Dátum 2008 december 12, 14:34
Írta: moly Dátum 2008 december 12, 14:34
Próbáltam több feszről is. Midég ugyan az a jelenség.Menni megy szépen azzal nincs baj csak nem követi a fordulat ill. feszültség ingadozást.
Tehát az áramerősséget nem tarja egy szinten.
Arra gondoltam úgy is három kell belőle, megépítem a másik kettőt is és ha én hibáztam,
hátha nem fogom háromszor ugyan úgy eltolni.
Tehát az áramerősséget nem tarja egy szinten.
Arra gondoltam úgy is három kell belőle, megépítem a másik kettőt is és ha én hibáztam,
hátha nem fogom háromszor ugyan úgy eltolni.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 12, 15:04
Írta: s7manbs8 Dátum 2008 december 12, 15:04
"Menni megy szépen azzal nincs baj"
ezt nem értem, ha megy szépen akkor mi a baj ?
milyen tápot használsz, az miért ingadozik ?
milyen porgrammal hajtod ?
ezt nem értem, ha megy szépen akkor mi a baj ?
milyen tápot használsz, az miért ingadozik ?
milyen porgrammal hajtod ?
Cím: Re:Léptetőmotor
Írta: moly Dátum 2008 december 12, 15:25
Írta: moly Dátum 2008 december 12, 15:25
Végre ! Én már megkaptam a karácsonyi ajándékot.
[#worship][#vigyor0] Hála néked! Átnéztem újból a panelt, és az "1-es rc" pont egy hajszál vékonyan le testelt ez volt a gond..
De érdekes mert a motor forgott egész és mikrolépésekben is. Az volt a baj hogy ha változtattam a motor fordulatát akkor változott vele az áramerősség is. Mintha csak "sima mezei" vezérlő lenne ,és nem pwm-es.
Így most 18V ról járatva tartja a 0.5 amper 0-500-as fordulat tartományban .
[#eljen]
[#worship][#vigyor0] Hála néked! Átnéztem újból a panelt, és az "1-es rc" pont egy hajszál vékonyan le testelt ez volt a gond..
De érdekes mert a motor forgott egész és mikrolépésekben is. Az volt a baj hogy ha változtattam a motor fordulatát akkor változott vele az áramerősség is. Mintha csak "sima mezei" vezérlő lenne ,és nem pwm-es.
Így most 18V ról járatva tartja a 0.5 amper 0-500-as fordulat tartományban .
[#eljen]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 12, 15:32
Írta: 000000000 Dátum 2008 december 12, 15:32
Sziasztok, na én is kiváncsi voltam és szétszedtem motort... valóban teljesen gyenge lett.. mert a mágnesség már nem igen működik.. Mit tudok akkor most tenni az ügy érdekében, esetleg valaki fel tudja mágnesezni vagy tudtok valami kapcsolást, elektonikát? Köszönöm!
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 12, 16:15
Írta: s7manbs8 Dátum 2008 december 12, 16:15
na, akkor eggyel kevesebb a gond, kicsit így jobb nézni a motor mozgását, mikor nekem is sikerült az első léptetőmotoromat rendesen beindítani veszett jó volt nézni, ahogy elkezdett működni.
Cím: Re:Léptetőmotor
Írta: moly Dátum 2008 december 12, 17:25
Írta: moly Dátum 2008 december 12, 17:25
Így van !!
Erre molyolok is egy jót!![#pias][#pias][#taps]
Erre molyolok is egy jót!![#pias][#pias][#taps]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 12, 17:36
Írta: 000000000 Dátum 2008 december 12, 17:36
Ha, most ki akartok nevetni, itt az alkalom.
Volt egy közönséges állandó mágnesű motorom. A mágnes gyenge volt, mint a harmat.
A két kivezetést összefogtam és a motort megpörgettem úgy 1-200 körül.
A mágnese újra a régi.
Hogy, mi ennek a magyarázata, azt nem tudom. Azt sem tudom, hogy léptetőmotornál működik-e, vagy nem.
Ettől aztán nem lettél előrébb.
A profik között biztosan lesz, aki tud Neked segíteni.
Volt egy közönséges állandó mágnesű motorom. A mágnes gyenge volt, mint a harmat.
A két kivezetést összefogtam és a motort megpörgettem úgy 1-200 körül.
A mágnese újra a régi.
Hogy, mi ennek a magyarázata, azt nem tudom. Azt sem tudom, hogy léptetőmotornál működik-e, vagy nem.
Ettől aztán nem lettél előrébb.
A profik között biztosan lesz, aki tud Neked segíteni.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 12, 17:42
Írta: s7manbs8 Dátum 2008 december 12, 17:42
az impulzusmagnesezo nem nagy dolog.kell hozza egy tekercs(nalam 48menet,vastag szogletes rezdrot),amire rasutok egy nagy tirisztoron keresztul egyeniranyitott 310v-ra feltoltott sokezer mikros kondikat.a magnesezes sikere persze fugg a kondik erteketol.a 220mm-es magneseket telitesig tolti
idézet az msteve #1498 szövegéből, ez nem jó neked ? így leírva a módszer gondolom működik
idézet az msteve #1498 szövegéből, ez nem jó neked ? így leírva a módszer gondolom működik
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 12, 17:48
Írta: s7manbs8 Dátum 2008 december 12, 17:48
no meg vigyázni kell, mert nagy a feszültség, és az amper is nehogy agyonüsse az embert
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 12, 17:52
Írta: s7manbs8 Dátum 2008 december 12, 17:52
a mágneses térben mozgó elektronra erő hat, és ez gerjeszti a feszültséget, ill. ha rövidre van zárva a két vége, akkor áram is elkezd benne folyni, mégmeg, ha jó gyorsan mozog, akkor annál nagyobb, és ez a tekercsáram mágneses teret is létrehoz, ami a mágnesét átmágnesezheti, ha elég nagy mértékű, nem tudom a fizikát "ki" hozta létre de érdekes dolgok tudnak történni a következményeként
Cím: Re:Léptetőmotor
Írta: fs9s63xkf Dátum 2008 december 12, 21:43
Írta: fs9s63xkf Dátum 2008 december 12, 21:43
Ma teszteltem egy léptetőmotort, mert Varsányi mindig azt mondja, hogy a léptetőmotor jobb mint a szervó mert az mindig ott van ahol kell.
Fogtam egy kétvégű léptetőmotort, és rászereltem egy 2000 soros enkódert. Ez lett belőle:

A teszt mozgás, kb 10 fordulat oda és vissza 100-msos gyorsítással és lassítással. A sebességen és a mikrolépésen változtattam.
500-as fordulat, 400-as mikrolépés :Kép
1200-as forulat, 400-as mikrolépés :Kép
500-as forulat, 8000-es mikrolépés :Kép
1200-as fordulat, 8000-es mikrolépés :Kép
És egy kis egységugrás:
500-as fordulat, 8000-es mikrolépés, 225rpm kezdő sebesség: Kép
A képeken az eltéréseket lehet látni, a referenciától azaz a Step jeltől. Az értékek enkóder impulzusban vannak mindig, ami egy fordulatra 8000-et jelent.
Tehát például az első képen lehet látni, hogy 500-as fordulaton, állandó sebességgel a léptetőmotor kb 26 lépéssel van mindig lemaradva. Ez egy 5mm-es orsóval 0.016 mm-t jelent.
A mikrolépés értéke nem befolyásolja az eltérés mértéket, csak finomabban jár tőle a motor.
A képek azt mutatják, hogy az eltérés, egyenes arányosságban van a sebességgel, míg egy szervónál az eltérés a gyorsítás mértékével arányos, hisz ott állandó sebességnél az eltérés 0 közeli érték.
Varsányi:
A feladat egy az X tengelytő 45 fokban elforgatott négyzet kimarása: még egy 1000-es hibatárolóval is jobb eredményeket kaphatok szervomotorral. Állandó sebességen szervonál "0" az eltérés, az meg hogy megállásnál 4ms-ig 1000 az eltérés az nem érdekel senkit, észre sem veszem a munkadarabon, de legalább a négyzet oldalai akkorák lesznek amekkorát mondtál neki.
Fogtam egy kétvégű léptetőmotort, és rászereltem egy 2000 soros enkódert. Ez lett belőle:
A teszt mozgás, kb 10 fordulat oda és vissza 100-msos gyorsítással és lassítással. A sebességen és a mikrolépésen változtattam.
500-as fordulat, 400-as mikrolépés :Kép
1200-as forulat, 400-as mikrolépés :Kép
500-as forulat, 8000-es mikrolépés :Kép
1200-as fordulat, 8000-es mikrolépés :Kép
És egy kis egységugrás:
500-as fordulat, 8000-es mikrolépés, 225rpm kezdő sebesség: Kép
A képeken az eltéréseket lehet látni, a referenciától azaz a Step jeltől. Az értékek enkóder impulzusban vannak mindig, ami egy fordulatra 8000-et jelent.
Tehát például az első képen lehet látni, hogy 500-as fordulaton, állandó sebességgel a léptetőmotor kb 26 lépéssel van mindig lemaradva. Ez egy 5mm-es orsóval 0.016 mm-t jelent.
A mikrolépés értéke nem befolyásolja az eltérés mértéket, csak finomabban jár tőle a motor.
A képek azt mutatják, hogy az eltérés, egyenes arányosságban van a sebességgel, míg egy szervónál az eltérés a gyorsítás mértékével arányos, hisz ott állandó sebességnél az eltérés 0 közeli érték.
Varsányi:
A feladat egy az X tengelytő 45 fokban elforgatott négyzet kimarása: még egy 1000-es hibatárolóval is jobb eredményeket kaphatok szervomotorral. Állandó sebességen szervonál "0" az eltérés, az meg hogy megállásnál 4ms-ig 1000 az eltérés az nem érdekel senkit, észre sem veszem a munkadarabon, de legalább a négyzet oldalai akkorák lesznek amekkorát mondtál neki.
Cím: Re:Léptetőmotor
Írta: Riboga Dátum 2008 december 12, 22:40
Írta: Riboga Dátum 2008 december 12, 22:40
A mérések nagyon jók, de szerintem a léptecs csak egy fél lépéssel van lemaradva. 8000/200= 40 lenne egy lépés.
Cím: Re:Léptetőmotor
Írta: fs9s63xkf Dátum 2008 december 12, 23:01
Írta: fs9s63xkf Dátum 2008 december 12, 23:01
Igazad van, ha egész lépésekben gondolkodunk. Amikor azt a 26 lépést írtam, akkor 26 8000-es mikrolépésre gondoltam. Így jött ki a 0.016mm is.
Egész lépésre nézve: 26/40 = 0.65 egész lépéssel van lemaradva, ami szintén 0.016 mm 5-ös orsóval.
Egész lépésre nézve: 26/40 = 0.65 egész lépéssel van lemaradva, ami szintén 0.016 mm 5-ös orsóval.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 13, 06:43
Írta: 000000000 Dátum 2008 december 13, 06:43
Mégsem volt nagy marhaság, amit írtan?
Eredetileg azért próbáltam így, mert arra voltam kíváncsi, hogy mennyivel lesz nehezebb hajtani a motort rövidzárban és ez lett a „mellékhatása”.
Eredetileg azért próbáltam így, mert arra voltam kíváncsi, hogy mennyivel lesz nehezebb hajtani a motort rövidzárban és ez lett a „mellékhatása”.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 13, 06:55
Írta: 000000000 Dátum 2008 december 13, 06:55
Bocs, hogy pancserként belebeszélek.
Szerintem nem a Varsányi Pétertől indult el csomó téveszme.
Amit szintén pancserként furcsállottam, hogy sokáig nem esik szó útmérő rendszerekről.
Ezek nélkül, pedig csak egy félkarú óriás egy CNC.
Egy dolog, hogy „mondom” egy motornak, hogy mit tegyen. Kell lenni egy útmérő rendszernek, hogy tudjam, hogy tényleg ott vagyok-e, ahol lenni akarok. No meg, visszacsatolás az útmérőtől a motorhoz.
Oldalakon keresztül az volt erőltetve, hogy bivaly erős léptető motor kell, hogy ne legyen lépésvesztés.
A bivalyerős motorhoz, viszont bivaly erős váz kell. Útmérő szükségességéről sokáig nem esik szó.
Szerintem nem a Varsányi Pétertől indult el csomó téveszme.
Amit szintén pancserként furcsállottam, hogy sokáig nem esik szó útmérő rendszerekről.
Ezek nélkül, pedig csak egy félkarú óriás egy CNC.
Egy dolog, hogy „mondom” egy motornak, hogy mit tegyen. Kell lenni egy útmérő rendszernek, hogy tudjam, hogy tényleg ott vagyok-e, ahol lenni akarok. No meg, visszacsatolás az útmérőtől a motorhoz.
Oldalakon keresztül az volt erőltetve, hogy bivaly erős léptető motor kell, hogy ne legyen lépésvesztés.
A bivalyerős motorhoz, viszont bivaly erős váz kell. Útmérő szükségességéről sokáig nem esik szó.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 13, 09:15
Írta: 000000000 Dátum 2008 december 13, 09:15
Léptetőmotornál ez a "felmágnesezés " nem működik. A léptecsben nincs kommutátor, ami egyenirányítana, és mindig ugyanolyan áramiránnyal gerjesztené az állórészt.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 13, 10:26
Írta: 000000000 Dátum 2008 december 13, 10:26
Szia Imi. Oks, de akkor mi a megoldás, mert ugye az bizos van.
Köszi
Köszi
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 13, 13:42
Írta: s7manbs8 Dátum 2008 december 13, 13:42
http://www.sasovits.hu/cnc/irodalom/hibrid_leptetomotor_vektoralis_vezerlese.pdf
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 13, 13:59
Írta: s7manbs8 Dátum 2008 december 13, 13:59
http://q-tech.hu/pdf/PR/Villamos%20hajtasok%20es%20mozgasvezerlok-4.pdf
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 13, 23:32
Írta: 3k74cecek Dátum 2008 december 13, 23:32
idézet:
Egy dolog, hogy „mondom” egy motornak, hogy mit tegyen. Kell lenni egy útmérő rendszernek, hogy tudjam, hogy tényleg ott vagyok-e, ahol lenni akarok. No meg, visszacsatolás az útmérőtől a motorhoz.
Oldalakon keresztül az volt erőltetve, hogy bivaly erős léptető motor kell, hogy ne legyen lépésvesztés.
A bivalyerős motorhoz, viszont bivaly erős váz kell. Útmérő szükségességéről sokáig nem esik szó.
(vége)
Léptető motor esetén jogosan nem esik szó az útmérésről.
Ugyanis amíg a motor nyomatékán belül van a terhelés, addig nyugodt lehetsz abban, hogy a motor végrehajtja a kiadott léptető impulzust. Ezáltal megspórolhatod az útmérést, és jóval egyszerűbb lehet a motor vezérlő is.
Ha a terhelés nagyobb mint a motor nyomatéka, akkor ha lenne útmérés és visszacsatolás, akkor is max. azt tudnád konstatálni, hogy baj van, mert a motor nem ott van ahol lennie kellene, de nem tudnád a jó pozícióba vinni, mert a terhelés egyszerűen nem engedi (vagy törik valami).
Ezért szeretik az egyszerű igényű helyeken a léptető motort használni a szervó helyett.
Jóval olcsóbb és egyszerűbb ez a megoldás, a maga (leginkább sebesség) korlátaival.
Egy dolog, hogy „mondom” egy motornak, hogy mit tegyen. Kell lenni egy útmérő rendszernek, hogy tudjam, hogy tényleg ott vagyok-e, ahol lenni akarok. No meg, visszacsatolás az útmérőtől a motorhoz.
Oldalakon keresztül az volt erőltetve, hogy bivaly erős léptető motor kell, hogy ne legyen lépésvesztés.
A bivalyerős motorhoz, viszont bivaly erős váz kell. Útmérő szükségességéről sokáig nem esik szó.
(vége)
Léptető motor esetén jogosan nem esik szó az útmérésről.
Ugyanis amíg a motor nyomatékán belül van a terhelés, addig nyugodt lehetsz abban, hogy a motor végrehajtja a kiadott léptető impulzust. Ezáltal megspórolhatod az útmérést, és jóval egyszerűbb lehet a motor vezérlő is.
Ha a terhelés nagyobb mint a motor nyomatéka, akkor ha lenne útmérés és visszacsatolás, akkor is max. azt tudnád konstatálni, hogy baj van, mert a motor nem ott van ahol lennie kellene, de nem tudnád a jó pozícióba vinni, mert a terhelés egyszerűen nem engedi (vagy törik valami).
Ezért szeretik az egyszerű igényű helyeken a léptető motort használni a szervó helyett.
Jóval olcsóbb és egyszerűbb ez a megoldás, a maga (leginkább sebesség) korlátaival.
Cím: Re:Léptetőmotor
Írta: HJózsi Dátum 2008 december 14, 02:17
Írta: HJózsi Dátum 2008 december 14, 02:17
Köszönjük a szemléletes méréseket! ... A görbékből látszik, miért nem szeretik a csillagászok távcsővezérlésre a léptető motort, ha fotózni is akarnak ...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 14, 07:18
Írta: 000000000 Dátum 2008 december 14, 07:18
Na végre!
Csak nem volt hiába az értetlenkedésem.
Valaki csak kimondta a lényeget.
Köszönöm Szigma!
Hasonló iránymutatásokra számítanék ezen az oldalon.
Valaki, aki tényleg ért hozzá, alapvetéseket fogalmazna meg és eldönthetem, hogy melyik rendszer passzol jobban a pénztárcámhoz, igényeimhez. Dönteni, csak úgy tudok, ha támpontokat kapok hozzá és nem ecc-pecc alapon, vagy rábeszélésre határozom el magam.
Persze, ezek csak az én rögeszméim. Mások, biztosan mást szeretnének.
Csak nem volt hiába az értetlenkedésem.
Valaki csak kimondta a lényeget.
Köszönöm Szigma!
Hasonló iránymutatásokra számítanék ezen az oldalon.
Valaki, aki tényleg ért hozzá, alapvetéseket fogalmazna meg és eldönthetem, hogy melyik rendszer passzol jobban a pénztárcámhoz, igényeimhez. Dönteni, csak úgy tudok, ha támpontokat kapok hozzá és nem ecc-pecc alapon, vagy rábeszélésre határozom el magam.
Persze, ezek csak az én rögeszméim. Mások, biztosan mást szeretnének.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 14, 07:19
Írta: 000000000 Dátum 2008 december 14, 07:19
Köszi!
Erre, tényleg nem gondoltam.
Erre, tényleg nem gondoltam.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 14, 08:08
Írta: 000000000 Dátum 2008 december 14, 08:08
Ez tényleg nagyon érdekes és már nagyon vártam egy ilyen mérés sorozatot én is! Köszönöm!
Feltételezem, hogy a mérhető szögeltérések az adot motorra jellemző, mint egy "motor újlenyomat". Ezért nem befolyásolja a mikrolépések száma. Érdekes lehet még motorcserélgetésekkel megállapítani, mely motorok követik a leghűebben a mikrolépést!
A finom rezgések meg a chopper álltal keltett forgórész rezonancia lehet.
Feltételezem, hogy a mérhető szögeltérések az adot motorra jellemző, mint egy "motor újlenyomat". Ezért nem befolyásolja a mikrolépések száma. Érdekes lehet még motorcserélgetésekkel megállapítani, mely motorok követik a leghűebben a mikrolépést!
A finom rezgések meg a chopper álltal keltett forgórész rezonancia lehet.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 december 14, 09:52
Írta: bmejdz9nu Dátum 2008 december 14, 09:52
Sajnos csak most néztem be a topikba... Ritka érdekes teszt amit csináltál, és nagyon hasznos...
Valóban azt írtam valahol, hogy a léptető motor egy pontos szerkezet... azaz elképzelhető olyan alkalmazás ahol ez előny lehet...
Pl. pár napja láttam egy lézer digitalizálót... most vették "pár millió" forintértért! A legújabb modell ... és léptetőmotorok vannak benne!
Visszatérve a teszthez:
Tehát 2000cpr-es encoder-el mérted, 4x-es mód = 8000ppr azaz egy fordulat 8000 jel.
A kétfázisú léptetőmotor ugyebár "anyai ágon" 200 lépésből tesz meg egy fordulatot.
Azaz a rá szerelt encoder egy teljes lépésre 40 jelet ad...
Tehát elvileg +/-20 eltérésnél* ha több van akkor az már az a jelenség amit Tibor sokszor írt, hogy a léptetőmotor képes tárolni...(na persze ezt még mindig nem értem)
A két teljes lépés között persze bármi előfordulhat... microstep vezérlés hibái, a tekercsek eltérései, rezonanciák...
Sőt a két egész lépés szögét is gyártáskor meghatározzák a léptetőmotor pontossági felépítésével... azaz nem mindegy, hogy milyen minőségű a léptetőmotor!
Milyen pontos az elektro-mechanikai felépítése a léptecsnek az encoder-hez képest... (ezt is lehetne tesztelni ezzel a módszerrel.)
A fent említett lézeres szkennerben Nanotec(.de) motorok voltak...
(* 20-nál több eltérésre, elengedve:) már a másik szögpozicióba kellene megpihennie :)
Érdekes... Érdekes lehetne a motort terhelve is ez a teszt...
Valóban azt írtam valahol, hogy a léptető motor egy pontos szerkezet... azaz elképzelhető olyan alkalmazás ahol ez előny lehet...
Pl. pár napja láttam egy lézer digitalizálót... most vették "pár millió" forintértért! A legújabb modell ... és léptetőmotorok vannak benne!
Visszatérve a teszthez:
Tehát 2000cpr-es encoder-el mérted, 4x-es mód = 8000ppr azaz egy fordulat 8000 jel.
A kétfázisú léptetőmotor ugyebár "anyai ágon" 200 lépésből tesz meg egy fordulatot.
Azaz a rá szerelt encoder egy teljes lépésre 40 jelet ad...
Tehát elvileg +/-20 eltérésnél* ha több van akkor az már az a jelenség amit Tibor sokszor írt, hogy a léptetőmotor képes tárolni...(na persze ezt még mindig nem értem)
A két teljes lépés között persze bármi előfordulhat... microstep vezérlés hibái, a tekercsek eltérései, rezonanciák...
Sőt a két egész lépés szögét is gyártáskor meghatározzák a léptetőmotor pontossági felépítésével... azaz nem mindegy, hogy milyen minőségű a léptetőmotor!
Milyen pontos az elektro-mechanikai felépítése a léptecsnek az encoder-hez képest... (ezt is lehetne tesztelni ezzel a módszerrel.)
A fent említett lézeres szkennerben Nanotec(.de) motorok voltak...
(* 20-nál több eltérésre, elengedve:) már a másik szögpozicióba kellene megpihennie :)
Érdekes... Érdekes lehetne a motort terhelve is ez a teszt...
Cím: Re:Léptetőmotor
Írta: HJózsi Dátum 2008 december 14, 10:27
Írta: HJózsi Dátum 2008 december 14, 10:27
Ezt a mérést QDSP-vel is el lehetne végezni, mint írtátok ... még az lenne érdekes milyen görbék születnének egész és fél lépés esetén ...
A mechanika amúgy biztosan javít a helyzeten, ill. megfelelő áttétel, amit a pontossági igényeknek megfelelően kell kialakítani (persze ez a sebesség csökkenésével jár, kérdés ott mi az igény.)
A mechanika amúgy biztosan javít a helyzeten, ill. megfelelő áttétel, amit a pontossági igényeknek megfelelően kell kialakítani (persze ez a sebesség csökkenésével jár, kérdés ott mi az igény.)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 14, 10:33
Írta: 000000000 Dátum 2008 december 14, 10:33
Igen, természetesen! Csak össze kellene kuplungolni és közös Step jelet kell kapni mindkét vezérlőnek.
Cím: Re:Léptetőmotor
Írta: 7vpav5d32 Dátum 2008 december 14, 12:14
Írta: 7vpav5d32 Dátum 2008 december 14, 12:14
Ismét egy laikus hozzá szólás. Ha én léptecs lennék csak egész felbontású ilyen tesztet engednék mert arra készültem. A többi nem főleg vezérlő függő???
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 december 14, 12:30
Írta: bmejdz9nu Dátum 2008 december 14, 12:30
Hát igen... az alaptesztelést az egész lépések pontosságával kellene kezdeni...
Utána jöhetne a gerjesztő tekercsek összehasonlítása (ellenállás és induktivitás a freki függvényében), mert ugyebár ettől függ az egész lépések közötti mozgás pontossága... felezés, aztán microstep... (ha a vezérlőt pontos "tekercs áramelosztó"-nak tekintjük, pedig ott is van/lehet hibalehetőség :)
Utána jöhetne a gerjesztő tekercsek összehasonlítása (ellenállás és induktivitás a freki függvényében), mert ugyebár ettől függ az egész lépések közötti mozgás pontossága... felezés, aztán microstep... (ha a vezérlőt pontos "tekercs áramelosztó"-nak tekintjük, pedig ott is van/lehet hibalehetőség :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 14, 12:32
Írta: 000000000 Dátum 2008 december 14, 12:32
Hát nem teljesen! A motorokat már régen nem egészlépésre tervezik, mivel senki nem használja úgy (a durva rezonanciák miatt). A vezérlő oldalt meg azért nem, mert minden vezérlő (nézd meg bármelyik leírását) egységes gerjesztési % táblázatokból dolgozik (ezek között van szinusz és háromszög hullámalakú verziók). Tehát minden vezérlő egy adott lépéshez ugyanolyan %-os gerjesztést fog beállítani. A szögelfordulás, az már motorfüggő.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 14, 12:35
Írta: 000000000 Dátum 2008 december 14, 12:35
A vezérlők adatlapján megadják a gerjesztési szórás pontosságát is. Nézd meg a Toshibáét, ott ez is fel van tüntetve.
Cím: Re:Léptetőmotor
Írta: 7vpav5d32 Dátum 2008 december 14, 12:45
Írta: 7vpav5d32 Dátum 2008 december 14, 12:45
Persze ezt én is értem, de amikor nincs stabil pont akkor a vezélő egy optimálisnak tűnő értékkel "játszik". Itt már szerintem komoly szerepe van a motor tehetetlenségének, talán a vezetékelésnek, hőmérsékletnek, stb. Ideális az lenne, ha minden ilyen plusz felbontás optimalizálva lenne az adott motorhoz és körülményhez( és még akkor is csak megközelítő pontosságot tudok elképzelni). Bocs ha butaságot írtam csak logikázok.
Cím: Re:Léptetőmotor
Írta: 7vpav5d32 Dátum 2008 december 14, 12:52
Írta: 7vpav5d32 Dátum 2008 december 14, 12:52
Persze ez a " ha nem tudod nem fáj" efektus. Eddig senkinek nem okozott problémát tehát nagy baj nem lehet.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 14, 13:01
Írta: 000000000 Dátum 2008 december 14, 13:01
Állítólag ez komoly vezérlőkben kalibrálható, de nem irigylem annak az üzembehelyezését![#zavart2]
A legtöbb vezérlő fix gerjesztési értékekkel dolgozik és a gyakorlatban a mikrostep nem a felbontás fokozásásra használják, hanem a szebb futásért (kisebb rezonanciák). Ettől függetlenül a szoftverben a mikrosteppes felbontást kell beállítani...
Hát igen... ilyenkor derül ki a valóság, mikor valaki meg is méri!
A legtöbb vezérlő fix gerjesztési értékekkel dolgozik és a gyakorlatban a mikrostep nem a felbontás fokozásásra használják, hanem a szebb futásért (kisebb rezonanciák). Ettől függetlenül a szoftverben a mikrosteppes felbontást kell beállítani...
Hát igen... ilyenkor derül ki a valóság, mikor valaki meg is méri!
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 december 14, 14:33
Írta: bmejdz9nu Dátum 2008 december 14, 14:33
Hát igen az lenne tökéletes mikrostepp vezérlés ha minden egész lépés közötti osztást azaz a tekercsekre kerülő áramot minden kívánt szöghöz lehetne állítani...
De ugyebár ez már messze nem hobby...
Viszont... Itt jön a képbe a motor minősége...
Azonos tekercspár*, mágnesek minősége, a mechanikai elemek pontos elhelyezése a motoron belül...
*pl. alapesetben... a két tekercsen azonos áramot átengedve mennyire áll be a motor a fél lépésre...
Azért megjegyzem, mert már ezek már sznobizmus határait súrolják...:) ,hogy a mechanikai kialakítása a gépnek sokkal több hibalehetőséget hordoznak magukban.
Egy egy "rossz" csapágyazás, gyenge minőségű golyósorsó választása stb. nagyságrenddel nagyobb "bajt" okozhatnak :)
De persze maradjunk a szervó kontra léptetőmotor összehasonlításnál... mert ez egy érdekes téma...
De ugyebár ez már messze nem hobby...
Viszont... Itt jön a képbe a motor minősége...
Azonos tekercspár*, mágnesek minősége, a mechanikai elemek pontos elhelyezése a motoron belül...
*pl. alapesetben... a két tekercsen azonos áramot átengedve mennyire áll be a motor a fél lépésre...
Azért megjegyzem, mert már ezek már sznobizmus határait súrolják...:) ,hogy a mechanikai kialakítása a gépnek sokkal több hibalehetőséget hordoznak magukban.
Egy egy "rossz" csapágyazás, gyenge minőségű golyósorsó választása stb. nagyságrenddel nagyobb "bajt" okozhatnak :)
De persze maradjunk a szervó kontra léptetőmotor összehasonlításnál... mert ez egy érdekes téma...
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 14, 20:34
Írta: 3k74cecek Dátum 2008 december 14, 20:34
Nem bántani akarlak, nagyon jó dolog ilyen teszt méréseket csinálni, de igazán hasznosak akkor lennének, ha pontosan megadnád a teszt körülményeit. Enélkül ugyanis nem nagyon lehet értékelni a szép cik-cakkos görbéket. Illetve nagyon könnyű téves következtetésre jutni.
1. kellene tudni a léptető motor adatait, vagy tipusát, hogy utána lehessen nézni az adatoknak
2. kellene tudni, hogy milyen léptető vezérlővel és azon milyen beállításokkal végezted a tesztet
3.kellene tudni, (és nem csak sejteni) hogy volt-e a motornak terhelése, vagy csak szólóban beépítés nélkül volt-e? Ha ez utóbbi volt, akkor nagyon hasznos lenne egy gépbe épített állapotú mérést is végezni. Megadva természetesen a beépítés körülményeit (orsó tipus (golyós/normál trapéz menetes), méret, emelkedés, mozgatott tömeg, kocsi megvezetés fajtája (gördülő/sikló, stb). Ezek ismeretében a mérésekből nagyon hasznos következtetéseket lehetne levonni.
4. kellene tudni, hogy a szép görbéket milyen módón állítottad elő? milyen eszközzel? milyen jelek, milyen feldolgozásával?
5. A képen rajta kellene lennie a step jelnek is, mert csak így lehetne igazán értékelni az eltérés jeleket.
6. hasznos lenne egy fotó is a teszt összeállításról, hogy ha valamilyen körülmény esetleg mérési hibát okozhatna azt észrevehessük. (Tudod csak azt hiszem amit látok).
Kicsit zavaró, hogy a görbék második fele a nulla vonal felett van. Így úgy tűnik mintha a vissza irányban sietne a motor, ami nyilván nincs így. Rögtön érthetőp lenne viszont ha tudnánk, hogy milyen módszerrel készült a görbe (4. pont a listában).
Jó lenne olyan mérés is, ahol néhány step jel annyira ritkán jönne, hogy a motornak legyen ideje közben teljesen megállni.
Van egyes görbéknek olyan része ami a fentiek ismerete nélkül egyenlőre értelmezhetetlen a számomra.
Ha tudnál a fentiek szerinti tesztet végezni az nagyon hasznos lenne.
1. kellene tudni a léptető motor adatait, vagy tipusát, hogy utána lehessen nézni az adatoknak
2. kellene tudni, hogy milyen léptető vezérlővel és azon milyen beállításokkal végezted a tesztet
3.kellene tudni, (és nem csak sejteni) hogy volt-e a motornak terhelése, vagy csak szólóban beépítés nélkül volt-e? Ha ez utóbbi volt, akkor nagyon hasznos lenne egy gépbe épített állapotú mérést is végezni. Megadva természetesen a beépítés körülményeit (orsó tipus (golyós/normál trapéz menetes), méret, emelkedés, mozgatott tömeg, kocsi megvezetés fajtája (gördülő/sikló, stb). Ezek ismeretében a mérésekből nagyon hasznos következtetéseket lehetne levonni.
4. kellene tudni, hogy a szép görbéket milyen módón állítottad elő? milyen eszközzel? milyen jelek, milyen feldolgozásával?
5. A képen rajta kellene lennie a step jelnek is, mert csak így lehetne igazán értékelni az eltérés jeleket.
6. hasznos lenne egy fotó is a teszt összeállításról, hogy ha valamilyen körülmény esetleg mérési hibát okozhatna azt észrevehessük. (Tudod csak azt hiszem amit látok).
Kicsit zavaró, hogy a görbék második fele a nulla vonal felett van. Így úgy tűnik mintha a vissza irányban sietne a motor, ami nyilván nincs így. Rögtön érthetőp lenne viszont ha tudnánk, hogy milyen módszerrel készült a görbe (4. pont a listában).
Jó lenne olyan mérés is, ahol néhány step jel annyira ritkán jönne, hogy a motornak legyen ideje közben teljesen megállni.
Van egyes görbéknek olyan része ami a fentiek ismerete nélkül egyenlőre értelmezhetetlen a számomra.
Ha tudnál a fentiek szerinti tesztet végezni az nagyon hasznos lenne.
Cím: Re:Léptetőmotor
Írta: fs9s63xkf Dátum 2008 december 14, 21:20
Írta: fs9s63xkf Dátum 2008 december 14, 21:20
Nincs itthon egész lépéses vezérlőm, mindegyik 400-al indul, így az egész lépéseket nem is tudtam tesztelni :(
Csináltam olyat is, hogy egyik irányba 5 lépést léptettem, aztán megint, aztán megint, kíváncsi voltam mennyire pontos, az esetek többségében 5-öt lépett, néha előfordult hogy csak 4-et de utána "behozta magát". Ez persze abból is adódhat, hogy az enkódert nem a megfelelő szögben szereltem fel.
Terhelve nem néztem meg, az is érdekes lenne, de így hirtelen nem volt gép amire felrakhattam volna :)
Csináltam olyat is, hogy egyik irányba 5 lépést léptettem, aztán megint, aztán megint, kíváncsi voltam mennyire pontos, az esetek többségében 5-öt lépett, néha előfordult hogy csak 4-et de utána "behozta magát". Ez persze abból is adódhat, hogy az enkódert nem a megfelelő szögben szereltem fel.
Terhelve nem néztem meg, az is érdekes lenne, de így hirtelen nem volt gép amire felrakhattam volna :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 14, 21:50
Írta: 000000000 Dátum 2008 december 14, 21:50
Szóval azért az én eddigi gyakorlati tapasztalatom
hüledezik ilyen nagy mértékű lépéstévesztéstől.
Hiszen egy több tízezer soros 3D-s marás végén hova állna vissza a null pozíció.
Márpedig ezt a mikrométer nem igazolja vissza.
hüledezik ilyen nagy mértékű lépéstévesztéstől.
Hiszen egy több tízezer soros 3D-s marás végén hova állna vissza a null pozíció.
Márpedig ezt a mikrométer nem igazolja vissza.
Cím: Re:Léptetőmotor
Írta: fs9s63xkf Dátum 2008 december 14, 21:54
Írta: fs9s63xkf Dátum 2008 december 14, 21:54
Ezzel a teszttel, csak annyi volt a célom, hogy megmutassam Varsányinak, hogy egy léptetőmotornak is van időállandója, és nem mindig "ott van ahol kéne".
1-2: Itt most lényegtelen adatok, egy léptetőmotor, és egy léptetőmotor vezérlő.
3: Ezt elfelejtettem megírni, nem volt terhelve... érdekes lenne úgy is tesztelni...
4: Egy PCI-os mozgásvezérlő kártya szolgáltatta a Step jeleket, és egy PCI-os enkóderolvasóval figyeltem a Step és az enkóder jeleket.
5: Csak egy gombnyomásba kerül, de nem tartottam fontosnak, a célnak így is megfelelt. A mozgást pedig leírtam.
6: Ha egy fényképen látható lenne a mérési hiba oka akkor azt én is észrevettem volna :) Meg egyébként is csak egy nagy ronda kábelrengeteg :)
A görbének a második fele azért van ellenkező irányban mert egyszerűen kivonom az enkóder pillanatnyi értékéből a step pillanatnyi értéket, és ez lesz az eltérés. Ezt már én is néztem, hogy ez így nem szerencsés, de egyenlőre nem írtam át, egyszerűen figyelni kéne, hogy a step jel az milyen irányba tart az adott pillanatban.
Melyik része érthetetlen, szívesen elmagyarázom, jelenleg nincs időm pontosabb mérésekre és azok pontos dokumentálására.
De mondom, csak Varsányi "felvilágosítása" volt a cél.
Az igaz, hogy rengeteg variációt le kéne tesztelni, hogy messzemenő következtetéseket lehessen levonni, de azért szerintem ez így is tanulságos és alapvető dolgok megállapítására ez a teszt is alkalmas.
1-2: Itt most lényegtelen adatok, egy léptetőmotor, és egy léptetőmotor vezérlő.
3: Ezt elfelejtettem megírni, nem volt terhelve... érdekes lenne úgy is tesztelni...
4: Egy PCI-os mozgásvezérlő kártya szolgáltatta a Step jeleket, és egy PCI-os enkóderolvasóval figyeltem a Step és az enkóder jeleket.
5: Csak egy gombnyomásba kerül, de nem tartottam fontosnak, a célnak így is megfelelt. A mozgást pedig leírtam.
6: Ha egy fényképen látható lenne a mérési hiba oka akkor azt én is észrevettem volna :) Meg egyébként is csak egy nagy ronda kábelrengeteg :)
A görbének a második fele azért van ellenkező irányban mert egyszerűen kivonom az enkóder pillanatnyi értékéből a step pillanatnyi értéket, és ez lesz az eltérés. Ezt már én is néztem, hogy ez így nem szerencsés, de egyenlőre nem írtam át, egyszerűen figyelni kéne, hogy a step jel az milyen irányba tart az adott pillanatban.
Melyik része érthetetlen, szívesen elmagyarázom, jelenleg nincs időm pontosabb mérésekre és azok pontos dokumentálására.
De mondom, csak Varsányi "felvilágosítása" volt a cél.
Az igaz, hogy rengeteg variációt le kéne tesztelni, hogy messzemenő következtetéseket lehessen levonni, de azért szerintem ez így is tanulságos és alapvető dolgok megállapítására ez a teszt is alkalmas.
Cím: Re:Léptetőmotor
Írta: fs9s63xkf Dátum 2008 december 14, 22:41
Írta: fs9s63xkf Dátum 2008 december 14, 22:41
Itt lépésvesztésről szó sincs, a tesztek során mindig visszament a motor 0-ra. a képeken látható eltérés nem lépésvesztést jelent hanem a forgás közbeni lemaradást. Lépésvesztést egyszer sem tapasztaltam.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 14, 22:55
Írta: 000000000 Dátum 2008 december 14, 22:55
Oké, akkor nem jól értelmeztem az írásod.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 december 15, 07:09
Írta: bmejdz9nu Dátum 2008 december 15, 07:09
Hát igen az egész lépéses vezérlő már szinte nincs is a piacon...(de azért lehet még szerezni:) Szerezzek? Nem gond.
Terhelve, egy tesztpadon...
Jó lenne orsó és lineáris vezető? Tudok egy jó beszerzési helyet :) :) :)
Na mindegy :)... A lényeges kérdésem:
Szerinted - így üresben - hány lépést (egész egységekben?) azaz fokot tud max. lemaradni a léptetőmotor amit még bírja lépésvesztés nélkül korrigálni magát?
Persze kíváncsi lennék még, hogy ez a szám függ e a motor nagyságától, terhelésétől...
Terhelve, egy tesztpadon...
Jó lenne orsó és lineáris vezető? Tudok egy jó beszerzési helyet :) :) :)
Na mindegy :)... A lényeges kérdésem:
Szerinted - így üresben - hány lépést (egész egységekben?) azaz fokot tud max. lemaradni a léptetőmotor amit még bírja lépésvesztés nélkül korrigálni magát?
Persze kíváncsi lennék még, hogy ez a szám függ e a motor nagyságától, terhelésétől...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 15, 07:20
Írta: 000000000 Dátum 2008 december 15, 07:20
Itt félre értesz valamit! A lépés "vesztés" nem vonatkozik körökre, csak a körön belüli szögelfordulások nem egyformák (kvázi lépésvesztés, vagy sietés lép fel), de teljes körre tekintve behozza magát! Tehát a motor nem minden lépésére ugyan annyi fokot mozdul, de a kör egészére tekintve ez végülis 0-ra kijön.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 december 15, 07:40
Írta: bmejdz9nu Dátum 2008 december 15, 07:40
Én akkor valamit félre értettem...
Ezzel már Tiborral is hadakoztam, mert pont ezt nem tudom elképzelni...
azaz, hogy tud a léptetőmotor 1,8fok elfordulásnál nagyobb lemaradást produkálni úgy, hogy ezt "behozza"...
Az, hogy a teljes lépésen belül (pl. microsteppek) mi történik az egyértelmű = bármi megeshet.
Az, hogy a motor pl. vegyünk alapul egész lépést... 360fok/200= 1,8fok... hogy ezt mennyire pontosan tudja... az csak a motorgyártón múlik... mennyire precíz az elektro-mechanikai kialakítás.
Ezzel már Tiborral is hadakoztam, mert pont ezt nem tudom elképzelni...
azaz, hogy tud a léptetőmotor 1,8fok elfordulásnál nagyobb lemaradást produkálni úgy, hogy ezt "behozza"...
Az, hogy a teljes lépésen belül (pl. microsteppek) mi történik az egyértelmű = bármi megeshet.
Az, hogy a motor pl. vegyünk alapul egész lépést... 360fok/200= 1,8fok... hogy ezt mennyire pontosan tudja... az csak a motorgyártón múlik... mennyire precíz az elektro-mechanikai kialakítás.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 15, 07:50
Írta: 000000000 Dátum 2008 december 15, 07:50
A mikrostep esetén a motor "lépése" egy relatív dolog. Ha a mikrostep miatt mondjuk kijönne 0.45°, akkor minden elméleti lépésének ennyinek kellene lenni, de a valóságba lehet (sőt biztos), hogy néhány lépésre többet fordul el, néhányra meg kevesebbet, de a körbeérésnél a forgórész ugyan oda fog beálni, tehát a körre tekintve nincs lpéseltérés, csak belül. A köztes fordulatok minden köztes térnegyedben, nyolcad, tizenhatodban (a motor kialakításától függően), két tekercs PWM-es gerjesztésének arányaitól függ. Ha a tekercselés, vezetékezés, netán vezérlőbeállítás nem az "ideális", akkor az eredő gerjesztési vektor már eltér a számítottól, tehát az elfordulás is el fog térni, de a kör végén, mindig ugyan úgy fog beállni mint induláskor (hisz ugyan azok a tekercsek, ugyanúgy lesznek gerjesztve).
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 15, 07:53
Írta: 000000000 Dátum 2008 december 15, 07:53
Ha a köztrs lépés valahol több mint 0.45°(példában), akkor kvázi siet a motor abban a pillanatban.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 december 15, 08:00
Írta: bmejdz9nu Dátum 2008 december 15, 08:00
"körbeérésnél a forgórész ugyan oda fog beállni"
Azt hiszem itt értjük félre egymást... Te egy teljes motorfordulatra gondolsz? (360 fok?)
Azt hiszem itt értjük félre egymást... Te egy teljes motorfordulatra gondolsz? (360 fok?)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 15, 08:23
Írta: 000000000 Dátum 2008 december 15, 08:23
Igen, egen! Ez azért fontos "tudni" mert nem adódnak össze a szöghibák, tehát ami egszer siet, az músut késni fog. Mikro lépések közötti nonlinearitásról beszélünk, nem impulzus vesztésről (ugye ez fogalmi difi)!
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 15, 09:35
Írta: 3k74cecek Dátum 2008 december 15, 09:35
Szerintem nem csak a kör végére hozza be az eltéréseket hanem már a következő egész lépés poziciójánál jó (a mechanikai pontosságának megfelelő) helyzetben lesz, hiszen akkor már nem a mikrólépés arányában van gerjesztve a két tekercse.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 15, 10:11
Írta: 3k74cecek Dátum 2008 december 15, 10:11
hogy tud a léptetőmotor 1,8fok elfordulásnál nagyobb lemaradást produkálni úgy, hogy ezt "behozza"..
Kissé bonyolult, de megpróbálom elmagyarázni.
Ha csak egész lépésekben gondolkodunk, akkor minden 4. lépésben lesznek a tekercsek azonosan gerjesztve. Ezalatt a (200lépéses) motor 7.2 fokot fordul. No ennak a fele, tehát 3.6 fok lehet elvileg a maximális késés, mert ha ennél nagyobb lenne, akkor visszaugrana a 0 fok (kiindulási állapot) poziciójába. Vagyis rögtön 4 lépést vesztene. Ez persze csak nagyon lassú léptetésre igaz, mert folyamatos mozgás közben még ekkora késés sem lehet, mert ebben a 3.6 fokos késés állapotában nincs nyomatéka a motornak.
Egyformán szeretne előreugrani a jó pozicióba és vissza a 4 lépéssel előbbibe.
Ebből az is látszik, hogy egy hibázási alkalom, rögtön négy lépésnyi hibát jelent.
Egy lépést tehát nem tud veszteni csak 4-nek a többszörösét.
A terhelő nyomaték ingadozása (esetleg előjel váltása) behoz valamennyi szöghibát, hiszen a nyomatékot az elméleti poziciótól való szögeltérés hozza létre. Ennek nagysága a motor konstrukciótól függ. Ez azonban a lépés nagyságához képet nem jelentős.
Mikrolépéses vezérlővel, az egész lépésen belül lehet linearitás hiba a vezérlő pontatlanságából, és ehhez adódik hozzá a terhelő nyomaték ingadozásából eredő hiba. Ezért célszerű a szükséges nyomatéknál akár 2-3-szor nagyobb nyomatékú motort használni, ha a mikrolépéseket is szeretnénk lehetőleg pontosnak tudni.
Kissé bonyolult, de megpróbálom elmagyarázni.
Ha csak egész lépésekben gondolkodunk, akkor minden 4. lépésben lesznek a tekercsek azonosan gerjesztve. Ezalatt a (200lépéses) motor 7.2 fokot fordul. No ennak a fele, tehát 3.6 fok lehet elvileg a maximális késés, mert ha ennél nagyobb lenne, akkor visszaugrana a 0 fok (kiindulási állapot) poziciójába. Vagyis rögtön 4 lépést vesztene. Ez persze csak nagyon lassú léptetésre igaz, mert folyamatos mozgás közben még ekkora késés sem lehet, mert ebben a 3.6 fokos késés állapotában nincs nyomatéka a motornak.
Egyformán szeretne előreugrani a jó pozicióba és vissza a 4 lépéssel előbbibe.
Ebből az is látszik, hogy egy hibázási alkalom, rögtön négy lépésnyi hibát jelent.
Egy lépést tehát nem tud veszteni csak 4-nek a többszörösét.
A terhelő nyomaték ingadozása (esetleg előjel váltása) behoz valamennyi szöghibát, hiszen a nyomatékot az elméleti poziciótól való szögeltérés hozza létre. Ennek nagysága a motor konstrukciótól függ. Ez azonban a lépés nagyságához képet nem jelentős.
Mikrolépéses vezérlővel, az egész lépésen belül lehet linearitás hiba a vezérlő pontatlanságából, és ehhez adódik hozzá a terhelő nyomaték ingadozásából eredő hiba. Ezért célszerű a szükséges nyomatéknál akár 2-3-szor nagyobb nyomatékú motort használni, ha a mikrolépéseket is szeretnénk lehetőleg pontosnak tudni.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 15, 11:07
Írta: 3k74cecek Dátum 2008 december 15, 11:07
Nehezen tudom elképzelni, hogy a Varsányi ezt nem tudja. Ha elméletből esetleg nem is, de gyakorlatból mindeképpen tudnia kell.
Azt szerintem senki sem gondolja, hogy a step jel kiadása után bármi is nulla idő alatt reagál.
Még az áram is "csak" fénysebességgel terjed, a mechanikáról már ne is beszéljünk.
Így tehát minden rendszernek van holtideje, meg időállandója. Majd azután kerül oda ahová küldtük.
Nem tudom értelmezni a következőket:
1. 500-as fordulat, 400-as mikrolépés, és az 1200-as forulat, 400-as mikrolépés képén a középen lévő egy db nagy ugrást. Itt valami enkóder problémát gyanítok. Esetleg a jeleket figyelő kártya vagy szoftver problémát.
2. az egységugrásnak nevezett 500-as fordulat, 8000-es mikrolépés, 225rpm kezdő sebesség képet, és az elején, közepén és végén lévő lengéseket.
Egyrészt a lengésektől eltekintve a görbe pontosan olyan jellegű mint a többi kép, ahol 100ms gyorsítási és lassítási ciklus van. Nehezen tudom elhinni, hogy ezek nélkül teljesen ugyanúgy viselkedjen a motor. Vagy ennél is megvolt ez gyorsítás/lassítás, akkor viszont mitől egységugrás?
A lengéseket sem igazán tudom elképzelni egy terheletlen motorról.
Persze ha tudnánk a #1654 1. és 2. pontjában hiányolt adatokat, akkor lehet hogy meglenne a magyarázat, így azonban tanácstalan vagyok.
3. a többi kép indulási szakaszai is sántítanak szerintem.
Amikor az álló motornak kiadjuk az első step jelet, akkor amig a motor meg nem moccan, addíg kellene a legnagyobb hibának lennie, ami utána szépen csökken, de nem olyan lengés jelleggel, mint az egységugrásnak nevezett képen. Vagy a másik lehetőség, hogy teljesen azonos amplitúdójú az ábra végig (mint egy hárömszög jel) ha a step jelek pont olyan gyakorisággal követik egymást, hogy akkor jön a következő step jel mire a motor pont felvette az előzőnek megfelelő poziciót, és nullára csökkent a hiba.
Az viszont semmi esetre sem lehet, hogy induláskor kisebb a hiba, mint a gyorsulási szakasz végén, és az egyenletes sebességű részen.
Szóval elég sok dolog zavaró számomra ezeken a képeken.
De mivel a leírásod szerint (legalábbis én így értem) egy általad írt program kimenő adata ez a görbe, így még egy program hibát sem tartok kizártnak. Esetleg hozzájöhet még egy olyan probléma, hogy az enkóder jel közepe nem a motor lépéspoziciójánál van. Tudni kellene az enkóder hiszterézisét is. Lehet, hogy ez zavar be. Távolról persze a részletek ismerete nélkül csak találgatni tudok.
Azt szerintem senki sem gondolja, hogy a step jel kiadása után bármi is nulla idő alatt reagál.
Még az áram is "csak" fénysebességgel terjed, a mechanikáról már ne is beszéljünk.
Így tehát minden rendszernek van holtideje, meg időállandója. Majd azután kerül oda ahová küldtük.
Nem tudom értelmezni a következőket:
1. 500-as fordulat, 400-as mikrolépés, és az 1200-as forulat, 400-as mikrolépés képén a középen lévő egy db nagy ugrást. Itt valami enkóder problémát gyanítok. Esetleg a jeleket figyelő kártya vagy szoftver problémát.
2. az egységugrásnak nevezett 500-as fordulat, 8000-es mikrolépés, 225rpm kezdő sebesség képet, és az elején, közepén és végén lévő lengéseket.
Egyrészt a lengésektől eltekintve a görbe pontosan olyan jellegű mint a többi kép, ahol 100ms gyorsítási és lassítási ciklus van. Nehezen tudom elhinni, hogy ezek nélkül teljesen ugyanúgy viselkedjen a motor. Vagy ennél is megvolt ez gyorsítás/lassítás, akkor viszont mitől egységugrás?
A lengéseket sem igazán tudom elképzelni egy terheletlen motorról.
Persze ha tudnánk a #1654 1. és 2. pontjában hiányolt adatokat, akkor lehet hogy meglenne a magyarázat, így azonban tanácstalan vagyok.
3. a többi kép indulási szakaszai is sántítanak szerintem.
Amikor az álló motornak kiadjuk az első step jelet, akkor amig a motor meg nem moccan, addíg kellene a legnagyobb hibának lennie, ami utána szépen csökken, de nem olyan lengés jelleggel, mint az egységugrásnak nevezett képen. Vagy a másik lehetőség, hogy teljesen azonos amplitúdójú az ábra végig (mint egy hárömszög jel) ha a step jelek pont olyan gyakorisággal követik egymást, hogy akkor jön a következő step jel mire a motor pont felvette az előzőnek megfelelő poziciót, és nullára csökkent a hiba.
Az viszont semmi esetre sem lehet, hogy induláskor kisebb a hiba, mint a gyorsulási szakasz végén, és az egyenletes sebességű részen.
Szóval elég sok dolog zavaró számomra ezeken a képeken.
De mivel a leírásod szerint (legalábbis én így értem) egy általad írt program kimenő adata ez a görbe, így még egy program hibát sem tartok kizártnak. Esetleg hozzájöhet még egy olyan probléma, hogy az enkóder jel közepe nem a motor lépéspoziciójánál van. Tudni kellene az enkóder hiszterézisét is. Lehet, hogy ez zavar be. Távolról persze a részletek ismerete nélkül csak találgatni tudok.
Cím: Re:Léptetőmotor
Írta: fs9s63xkf Dátum 2008 december 15, 12:30
Írta: fs9s63xkf Dátum 2008 december 15, 12:30
1. Azt a jelenséget jelenleg én sem tudom megmagyarázni, lehet szoftver hiba is, de az enkóder rossz elhelyezése is okozhatja, ha lesz időm akkor utánajárok. De mindig ott volt, 400-as mikrolépésnél.
2. 225 rpm-el indult majd ezután következett egy 100ms-os gyorsítás 500-as fordulatra, utána kb 10 fordulat, 100ms-os lassítása 225 rpm-re majd megállás. Azok a lengések a léptetőmotor válasza az egységugrásra, ezt egyszer már Tibor45 is bemutatta:

3. A léptetőmotor eltérése a sebességével egyenesen arányos szerintem, és mivel egy gyorsítási szakasszal indul a mozgás ezért az eltérés szép fokozatosan nő, állandó sebességnél állandó...
Amire Te gondolsz, az a szervóra igaz:
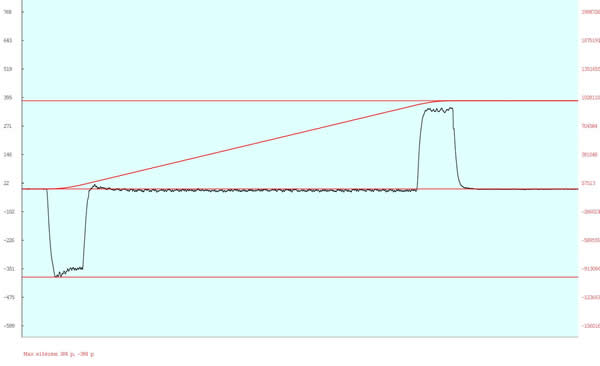
A piros görbe a step jel, csak a kedvedért :)
Itt, amikor véget ér a gyorsítás szakasz akkor az eltérés is lecsökken 0 környékére. Itt az eltérés a gyorsítással arányos. Gondolom ez a különbség a visszacsatolás hiányából adódik, de ezt inkább Tibor45-el kéne megvitatnod :)
Tibor45 nem kritizálta eddig a méréseket, így feltételezem olyan nagy marhaságot nem csinálhattam :)
Tibor45:
Mi a véleményed a tesztekkel kapcsolatban?
2. 225 rpm-el indult majd ezután következett egy 100ms-os gyorsítás 500-as fordulatra, utána kb 10 fordulat, 100ms-os lassítása 225 rpm-re majd megállás. Azok a lengések a léptetőmotor válasza az egységugrásra, ezt egyszer már Tibor45 is bemutatta:
3. A léptetőmotor eltérése a sebességével egyenesen arányos szerintem, és mivel egy gyorsítási szakasszal indul a mozgás ezért az eltérés szép fokozatosan nő, állandó sebességnél állandó...
Amire Te gondolsz, az a szervóra igaz:
A piros görbe a step jel, csak a kedvedért :)
Itt, amikor véget ér a gyorsítás szakasz akkor az eltérés is lecsökken 0 környékére. Itt az eltérés a gyorsítással arányos. Gondolom ez a különbség a visszacsatolás hiányából adódik, de ezt inkább Tibor45-el kéne megvitatnod :)
Tibor45 nem kritizálta eddig a méréseket, így feltételezem olyan nagy marhaságot nem csinálhattam :)
Tibor45:
Mi a véleményed a tesztekkel kapcsolatban?
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 15, 13:56
Írta: 3k74cecek Dátum 2008 december 15, 13:56
2.höz: Egyre homályosabb kezd lenni a dolog.
Jó lenne ha a görbe alatt szerepelne, hogy melyik szakasz minek felel meg, mert amit most leírtál eseménysornak azt nem tudom a görbéhez illeszteni. Vagy a leírás nem jó, vagy a görbe hosszabb, szóval zavaros.
Tibor45 régi dolgaira nem emlékszem( lehet, hogy akkor még nem is voltam itt a fórumon).
Ennek a szép lecsengő lengésnek nem ismerem a körülményeit így nem tudok rá semmit mondani, csak azt, hogy az Y tengely feliratát még elolvasni sem tudom, olyan rossz a kép felbontása :(
Közben gondolkodom, hogy indulásnál ugyan mitől kezd vadul lengeni a motor (a megállásnál még értem).
Van is teóriám rá, de ahhoz a vezérlőn is kellene komoly méréseket végezni szkóppal, hogy
eldönthessem igazam van-e. Vezérlőm, meg szkópom még van is, de enkoderem nincs, így ezt nem tudom lemérni.
3. a #1669 3. pontjának első mondatának eleje értelmében az indulás pillanatában kellene a legnagyobb hibának lenni.
Szerintem a hiba nem a sebességgel arányos (terheletlen motorról beszélünk, ahol a gördülési ellenállás elhanyagolható, és nem is sebesség függő ), hanem a gyorsulással. Mivel gyorsítani kell, a gyorsító nyomatékot pedig a lemaradás hozza létre.Ennek is ellentmond a te görbéd.
Vegyél fel görbét a motor határfordulatszámához közeli fordulattal, hogy ott mekkora lesz a lemaradás. Erős a gyanúm hogy a görbéd szerint már lépést kellene vesztenie, de a valóságban mégsem veszt. Ne legyen benne oda-vissza forgás, csak egy írány, mert akkor ha tényleg veszt a végeredmény mégis nulla lesz, vagy lehet.
Közben még arra is gondoltam, hogy a PCI-os kártya vajon minlyen gyakori mintavételezéssel dolgozik, illetve a program milyen gyorsan dolgozza fel az adatokat. Ez is okozhat hibát.
Gondolj csak arra, hogy a mintavevős szkóp hogy be tud csapni, ha a mintavételi freki nem jóval nagyobb mint a mért jel frekije. Esetleg itt is felléphet egy ilyen jelenség.
Erre az is utal, hogy nagyon háromszög jellegűek a görbék. Mintha a ritka mérési pontok lennének összekötve egyenesekkel, és ezáltal a valóságtól eltérő jellegű görbéket kapnánk.
A kedvemért betett step jeles görbét meg végképp nem értem.
Melyik PIROS a step jel ?
PIROS-ból csak 3 vizszintest meg egy enyhén emelkedő egyenest látok.
Ezekhez képest akkor mi a két fekete négyszög impulzus?
És hol a hiba nagysága a step jelhez képest?
Egyáltalán ez a kép most szervóra vonatkozik vagy léptető motorra?
Ez sem egyértelmű, mert a "szervóra igaz:" szöveg után van mintegy illusztrációként, de így sem értem. Idő lépték nincs így fogalmam sincs mit akar ábrázolni.
Továbbá: Az hogy Tibor45 nem kritizálta, az nem jelenti azt, hogy hibátlan amit írtál, mert:
1. lehet, hogy nem is olvasta (ebben a topikban nem írt a görbéid megjelenése óta)
2. olvasta de nem ér rá/ nincs kedve reagálni
3. most fogalmazza a hozzászólását
4. ...stb.
Jó lenne ha a görbe alatt szerepelne, hogy melyik szakasz minek felel meg, mert amit most leírtál eseménysornak azt nem tudom a görbéhez illeszteni. Vagy a leírás nem jó, vagy a görbe hosszabb, szóval zavaros.
Tibor45 régi dolgaira nem emlékszem( lehet, hogy akkor még nem is voltam itt a fórumon).
Ennek a szép lecsengő lengésnek nem ismerem a körülményeit így nem tudok rá semmit mondani, csak azt, hogy az Y tengely feliratát még elolvasni sem tudom, olyan rossz a kép felbontása :(
Közben gondolkodom, hogy indulásnál ugyan mitől kezd vadul lengeni a motor (a megállásnál még értem).
Van is teóriám rá, de ahhoz a vezérlőn is kellene komoly méréseket végezni szkóppal, hogy
eldönthessem igazam van-e. Vezérlőm, meg szkópom még van is, de enkoderem nincs, így ezt nem tudom lemérni.
3. a #1669 3. pontjának első mondatának eleje értelmében az indulás pillanatában kellene a legnagyobb hibának lenni.
Szerintem a hiba nem a sebességgel arányos (terheletlen motorról beszélünk, ahol a gördülési ellenállás elhanyagolható, és nem is sebesség függő ), hanem a gyorsulással. Mivel gyorsítani kell, a gyorsító nyomatékot pedig a lemaradás hozza létre.Ennek is ellentmond a te görbéd.
Vegyél fel görbét a motor határfordulatszámához közeli fordulattal, hogy ott mekkora lesz a lemaradás. Erős a gyanúm hogy a görbéd szerint már lépést kellene vesztenie, de a valóságban mégsem veszt. Ne legyen benne oda-vissza forgás, csak egy írány, mert akkor ha tényleg veszt a végeredmény mégis nulla lesz, vagy lehet.
Közben még arra is gondoltam, hogy a PCI-os kártya vajon minlyen gyakori mintavételezéssel dolgozik, illetve a program milyen gyorsan dolgozza fel az adatokat. Ez is okozhat hibát.
Gondolj csak arra, hogy a mintavevős szkóp hogy be tud csapni, ha a mintavételi freki nem jóval nagyobb mint a mért jel frekije. Esetleg itt is felléphet egy ilyen jelenség.
Erre az is utal, hogy nagyon háromszög jellegűek a görbék. Mintha a ritka mérési pontok lennének összekötve egyenesekkel, és ezáltal a valóságtól eltérő jellegű görbéket kapnánk.
A kedvemért betett step jeles görbét meg végképp nem értem.
Melyik PIROS a step jel ?
PIROS-ból csak 3 vizszintest meg egy enyhén emelkedő egyenest látok.
Ezekhez képest akkor mi a két fekete négyszög impulzus?
És hol a hiba nagysága a step jelhez képest?
Egyáltalán ez a kép most szervóra vonatkozik vagy léptető motorra?
Ez sem egyértelmű, mert a "szervóra igaz:" szöveg után van mintegy illusztrációként, de így sem értem. Idő lépték nincs így fogalmam sincs mit akar ábrázolni.
Továbbá: Az hogy Tibor45 nem kritizálta, az nem jelenti azt, hogy hibátlan amit írtál, mert:
1. lehet, hogy nem is olvasta (ebben a topikban nem írt a görbéid megjelenése óta)
2. olvasta de nem ér rá/ nincs kedve reagálni
3. most fogalmazza a hozzászólását
4. ...stb.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 december 15, 15:19
Írta: bmejdz9nu Dátum 2008 december 15, 15:19
Mindíg tanul az ember és figyelmetlen voltam...:) (animációs link) Akkor persze 4. lépésekre gondoltam...
Ezek szerint semmi sem biztos egy léptetőnél?...Vagy encodert kell rá szerelni?

Egy szervóval, encoderrel ez nem fordul elő...:) Na megyek vissza okoskodni a szervótopikba :)
Ezek szerint semmi sem biztos egy léptetőnél?...Vagy encodert kell rá szerelni?
Egy szervóval, encoderrel ez nem fordul elő...:) Na megyek vissza okoskodni a szervótopikba :)
Cím: Re:Léptetőmotor
Írta: fs9s63xkf Dátum 2008 december 15, 16:48
Írta: fs9s63xkf Dátum 2008 december 15, 16:48
2. Természetesen ez az eseménysor ismétlődik még egyszer csak a másik irányba, de ezt már írtam.
1ms-os mintavételezéssel dolgozik a szoftver, eddig még mindig elég volt.
Az a kép pedig egy szervómotor eltérését mutatja. A fekete görbe az eltérést mutatja, mint eddig. A három vízszintes vonal eddig is ott volt, így kizárásos alapon, az az enyhén emelkedő a step jel :) A görbe elején és végén hozzásimul a 2 vízszintes tengelyhez (ezt alig látni), a step jel aktuális értéke. És azért négyszög jel, mert a gyorsítás egy trapéz mentén történt, ha S görbe alapján gyorsítana, akkor egy háromszög formát kapnánk mint eltérés.
1ms-os mintavételezéssel dolgozik a szoftver, eddig még mindig elég volt.
Az a kép pedig egy szervómotor eltérését mutatja. A fekete görbe az eltérést mutatja, mint eddig. A három vízszintes vonal eddig is ott volt, így kizárásos alapon, az az enyhén emelkedő a step jel :) A görbe elején és végén hozzásimul a 2 vízszintes tengelyhez (ezt alig látni), a step jel aktuális értéke. És azért négyszög jel, mert a gyorsítás egy trapéz mentén történt, ha S görbe alapján gyorsítana, akkor egy háromszög formát kapnánk mint eltérés.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 15, 18:19
Írta: 3k74cecek Dátum 2008 december 15, 18:19
Jól éreztem, hogy itt valami nem stimmel.
Sajnos a méréseidet nem lehet értékelni, totál átverted magadat (és minket is, de szemfülesek vagyunk és rájöttünk [#papakacsint])
Az 1ms mintavételezési idő ide használhatatlan. Kb. 200-szor töb mintára lenne szükség.
Van egy egy motorod ami forog 500-at percenként. Ez 8.3 ford/sec. Erre feltettél egy 2000 jeles enkódert.
Ebből 8.3*2000=16666 jel jön másodpercenként. Ebből te megnézel 1000-et. A többi 15600-ról meg nem tudsz semmit.
Pontosan az a jelenség történik amit a mintavevős szkópról írtam.
Ahhoz hogy kellő pontosságú mérést tudjál végezni ilyen digitális jeleken, legalább 10-szeres sebességű mintavételezés kellene. Tehát kb. 5 mikrosec gyakorisággal kellene mintavételezned.
A step jeles képhez:
A step jelnek egy függőleges élnek kellene lennie. Akkor lehetne tudni, hogy mikor lett érvényes. Annak a ferde egyenesnek melyik részét érzékeli vajon a vezérlő step jelnek? Alját, közepét, tetejét ?
Aztán hogy van az hogy még nulla értékű a step jel, de a hibajel már elér egy jelentős negatív értéket? ( A pontos értéket nem tudom elolvasni, mert nem látszik jól a szöveg a képen)
Az biztos, hogy itt valami komoly mérési vagy kiértékelési hiba van a munkádban.
De nem is érdekes mert a fentiek miatt az egész mérés egy nagy önbecsapás sajnos.
Sajnos a méréseidet nem lehet értékelni, totál átverted magadat (és minket is, de szemfülesek vagyunk és rájöttünk [#papakacsint])
Az 1ms mintavételezési idő ide használhatatlan. Kb. 200-szor töb mintára lenne szükség.
Van egy egy motorod ami forog 500-at percenként. Ez 8.3 ford/sec. Erre feltettél egy 2000 jeles enkódert.
Ebből 8.3*2000=16666 jel jön másodpercenként. Ebből te megnézel 1000-et. A többi 15600-ról meg nem tudsz semmit.
Pontosan az a jelenség történik amit a mintavevős szkópról írtam.
Ahhoz hogy kellő pontosságú mérést tudjál végezni ilyen digitális jeleken, legalább 10-szeres sebességű mintavételezés kellene. Tehát kb. 5 mikrosec gyakorisággal kellene mintavételezned.
A step jeles képhez:
A step jelnek egy függőleges élnek kellene lennie. Akkor lehetne tudni, hogy mikor lett érvényes. Annak a ferde egyenesnek melyik részét érzékeli vajon a vezérlő step jelnek? Alját, közepét, tetejét ?
Aztán hogy van az hogy még nulla értékű a step jel, de a hibajel már elér egy jelentős negatív értéket? ( A pontos értéket nem tudom elolvasni, mert nem látszik jól a szöveg a képen)
Az biztos, hogy itt valami komoly mérési vagy kiértékelési hiba van a munkádban.
De nem is érdekes mert a fentiek miatt az egész mérés egy nagy önbecsapás sajnos.
Cím: Re:Léptetőmotor
Írta: fs9s63xkf Dátum 2008 december 15, 19:19
Írta: fs9s63xkf Dátum 2008 december 15, 19:19
Rosszul érezted :)
Komolyan ilyen amatőrnek nézel??? Hízelgő!
Namost először is 66666.66666 jelet dolgoztam fel másodpercenként a 4x-es jelfeldolgozás miatt, ezt is írtam korábban...
És azt is írtam, hogy egy PCI-os enkóderólvasóval mérem a jeleket, ami 6MHz-es jelet is képes feldolgozni. Ezt eltárolja egy 32-bites regiszterben és én ebből veszek mintát 1ms-onként. Természetesen jobb lenne sűrűbben mintavételezni, de már ez az 1ms is nehezen megvalósítható a remek multitaskos oprendszer miatt.
De mi is történik, én 1ms-onként megnézem ezt a 32-bites tárolót, és látok benne két értéket ahol biztosan járt az enkóder és a step jel. Két mintavételezés közzött persze ha nő az eltérés, aztán gyorsan visszacsökken, akkor én arról nem tudok, de akkor is az amit én látok a monitoron, annál már csak rosszabb lehet, nagyobb eltéréseket nem fogok kapni, mint ami ténylegesen előfordult.
Mellesleg, ha tényleg úgy mintavételeznék, ahogy Te mondod, akkor hogy magyaráznád, hogy a grafikonok jobb oldalán amikor már nincs eltérés, a mozgásnak vége van akkor mindig visszatértünk a 0 eltéréshez??? Elég nagy mázlinak kéne lennie, nem?
Step jeles kép:
Ez a fentiek értelmében nem a step jel maga, hanem a 32-bites regiszte értéke...
Nem nulla értéknél van az eltérés az elején, ott már elindult a step jel természetesen csak nem látszik mivel össze kellett nyomnom a grafikont hiszen a 384 eltérésre jutott 1000000 step jel, ezért nem lehet látni rendesen és ezért nem is akartam betenni...
Örülnék, ha a nem tennél olyan kijelentéseket, hogy átverek mindenkit anélkül, hogy pontosan tudnál minden részletet, és tényleg bebizonyosodott volna, hogy tévedek.
Komolyan ilyen amatőrnek nézel??? Hízelgő!
Namost először is 66666.66666 jelet dolgoztam fel másodpercenként a 4x-es jelfeldolgozás miatt, ezt is írtam korábban...
És azt is írtam, hogy egy PCI-os enkóderólvasóval mérem a jeleket, ami 6MHz-es jelet is képes feldolgozni. Ezt eltárolja egy 32-bites regiszterben és én ebből veszek mintát 1ms-onként. Természetesen jobb lenne sűrűbben mintavételezni, de már ez az 1ms is nehezen megvalósítható a remek multitaskos oprendszer miatt.
De mi is történik, én 1ms-onként megnézem ezt a 32-bites tárolót, és látok benne két értéket ahol biztosan járt az enkóder és a step jel. Két mintavételezés közzött persze ha nő az eltérés, aztán gyorsan visszacsökken, akkor én arról nem tudok, de akkor is az amit én látok a monitoron, annál már csak rosszabb lehet, nagyobb eltéréseket nem fogok kapni, mint ami ténylegesen előfordult.
Mellesleg, ha tényleg úgy mintavételeznék, ahogy Te mondod, akkor hogy magyaráznád, hogy a grafikonok jobb oldalán amikor már nincs eltérés, a mozgásnak vége van akkor mindig visszatértünk a 0 eltéréshez??? Elég nagy mázlinak kéne lennie, nem?
Step jeles kép:
Ez a fentiek értelmében nem a step jel maga, hanem a 32-bites regiszte értéke...
Nem nulla értéknél van az eltérés az elején, ott már elindult a step jel természetesen csak nem látszik mivel össze kellett nyomnom a grafikont hiszen a 384 eltérésre jutott 1000000 step jel, ezért nem lehet látni rendesen és ezért nem is akartam betenni...
Örülnék, ha a nem tennél olyan kijelentéseket, hogy átverek mindenkit anélkül, hogy pontosan tudnál minden részletet, és tényleg bebizonyosodott volna, hogy tévedek.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 15, 20:20
Írta: 3k74cecek Dátum 2008 december 15, 20:20
Mivel nem ismerlek így csak az általad írtak alapján tudok következtetni. Mivel ez egy hobby fórum, így akár amatőrnek is nézhetlek, minden sértő szándék nélkül, míg más nem derül ki.
Félreértés ne legyen nem cikizni akarlak, szeretném én is megérteni a mérésed eredményét, de eddig ez nem sikerült.
Akkor menjünk sorba. Most a #1629-től kezdődő dolgokat nézzük csak, mert a téma ott kezdődött.
Azóta nem olvastam sehol, hogy 66666 jelet dolgoztál fel másodpercenként.
Szintén nem olvastam sehol, hogy a PCI-os kártyád 6MHz-es jelet is képes feldolgozni.
Így nincs miért a szememre hánynod, hogy úgy tünik mintha amatőrnek néznélek.
Próbáltam kideríteni a mérésed körülményeit, mert továbbra is alapvető hibákat látok az eredményben, amire eddig még nincs magyarázat. Eddig nem adtál olyan adatokat amik a felvetett és elvi hibának tartott részeket megmagyaráznák.
Amit most írtál annak alapján még mindíg nem vagyok meggyőződve arról, hogy hibátlan a mérésed.
Ha veszed a fáradtságot és elmagyarázol néhány dolgot, akkor kiderülhet, hogy hol van az igazság, ha nem, akkor részemről befejezem, mert sötétszobában nincs értelme tapogatódznom.
Ha ezek után kiderül, hogy én tévedtem, készséggel megkövetlek. Az átverést azért ne úgy értsd, hogy tudatosan, rosszindulatúan becsaptál minket. Én úgy értettem, hogy egy fel nem ismert tévedés, hiba folytán az eredményed nem a valóságot tükrözi. Ezért is volt a smájli a szemfülesek vagyunk után.
A következőket nem tudom egyelőre:
A 32 bites regiszter milyen formában milyen adatot tárol?
Mennyi ideig tárolja ezt az adatot? Amíg ki nem olvasod, vagy amíg egy újabb adat nem jön?
Ha jól értem egy darab ilyen regiszter van, és ezt 1ms-ként kiolvasod.
Hogyan dolgozod fel a kiolvasott adatokat?
"..és látok benne két értéket ahol biztosan járt az enkóder és a step jel."
Ezt a mondatot nem tudom értelmezni, de lehet, hogy világos lesz ha tudom, hogy mit tartalmaz a regiszter.
"Két mintavételezés közzött persze ha nő az eltérés, aztán gyorsan visszacsökken, akkor én arról nem tudok,"
Ez viszont azt eredményezheti, hogy a grafikonod jellege eltér a valóságtól. Pont ez az ami gyanús lett nekem.
Azért remélem sikerül kiderítenünk az igazságot.
Félreértés ne legyen nem cikizni akarlak, szeretném én is megérteni a mérésed eredményét, de eddig ez nem sikerült.
Akkor menjünk sorba. Most a #1629-től kezdődő dolgokat nézzük csak, mert a téma ott kezdődött.
Azóta nem olvastam sehol, hogy 66666 jelet dolgoztál fel másodpercenként.
Szintén nem olvastam sehol, hogy a PCI-os kártyád 6MHz-es jelet is képes feldolgozni.
Így nincs miért a szememre hánynod, hogy úgy tünik mintha amatőrnek néznélek.
Próbáltam kideríteni a mérésed körülményeit, mert továbbra is alapvető hibákat látok az eredményben, amire eddig még nincs magyarázat. Eddig nem adtál olyan adatokat amik a felvetett és elvi hibának tartott részeket megmagyaráznák.
Amit most írtál annak alapján még mindíg nem vagyok meggyőződve arról, hogy hibátlan a mérésed.
Ha veszed a fáradtságot és elmagyarázol néhány dolgot, akkor kiderülhet, hogy hol van az igazság, ha nem, akkor részemről befejezem, mert sötétszobában nincs értelme tapogatódznom.
Ha ezek után kiderül, hogy én tévedtem, készséggel megkövetlek. Az átverést azért ne úgy értsd, hogy tudatosan, rosszindulatúan becsaptál minket. Én úgy értettem, hogy egy fel nem ismert tévedés, hiba folytán az eredményed nem a valóságot tükrözi. Ezért is volt a smájli a szemfülesek vagyunk után.
A következőket nem tudom egyelőre:
A 32 bites regiszter milyen formában milyen adatot tárol?
Mennyi ideig tárolja ezt az adatot? Amíg ki nem olvasod, vagy amíg egy újabb adat nem jön?
Ha jól értem egy darab ilyen regiszter van, és ezt 1ms-ként kiolvasod.
Hogyan dolgozod fel a kiolvasott adatokat?
"..és látok benne két értéket ahol biztosan járt az enkóder és a step jel."
Ezt a mondatot nem tudom értelmezni, de lehet, hogy világos lesz ha tudom, hogy mit tartalmaz a regiszter.
"Két mintavételezés közzött persze ha nő az eltérés, aztán gyorsan visszacsökken, akkor én arról nem tudok,"
Ez viszont azt eredményezheti, hogy a grafikonod jellege eltér a valóságtól. Pont ez az ami gyanús lett nekem.
Azért remélem sikerül kiderítenünk az igazságot.
Cím: Re:Léptetőmotor
Írta: fs9s63xkf Dátum 2008 december 15, 22:06
Írta: fs9s63xkf Dátum 2008 december 15, 22:06
Azt hittem egyértelmű, hogy mit csinál egy enkóderolvasó kártya, ha nem akkor bocsi.
Van 4 tengelye, és mindegyikre köthetek enkódert, vagy stepdir jelet. Mindegyik tengelynek van egy regisztere amiben tárolja az impulzusok számát. 0-ról indulunk, és ha érkezik egy jel akkor hozzáadja a regiszterhez vagy levonja a regiszterből, attól függ merre megy... Ezt a számítógép kikapcsolásáig tárolja, de felül is írhatom bármikor.
Na ebből veszek mintát 1ms-onként, ami az enkóder pillanatnyi értékét fogja mutatni, illetve, hogy a step jel hol tart. A mintavételezés csak annyiból áll, hogy eltárolom egy tömbben a későbbi feldolgozáshoz, de akár ki is vonhatom ott helyben, 1ms alatt rengeteg dolgot lehet csinálni...
Miután vége a "felvételnek" kivonom a két tömbben ugyanazon indexű értékeket. Ezt most egy kicsit átírtam, hogy ne nézzen ki úgy mintha sietne...
Ugye a két mintavételezés között a kártya tovább számolta a jeleket, itt történik egy kis veszteség, mert itt ugye a két pont közé én csak egy egyenest tudok húzni. Ez nem is veszteség, inkább pontatlanság, mert ugye megszámolta a kártya azokat a jeleket is, de nincs rajta a grafikonon. Ennyi pontatlanság nem változtat a jellegen!!
Én "elég" korrektnek tartom ezt a mérést, és szervóknál már bizonyított. Ha lehet hallani kis rezgéseket menet közben, akkor az a grafikonon egyből megjelenik, ha megállásnál nagyon sok a lengés, amit már szemmel is lehet látni, akkor az a grafikonon is látható. A különböző gyorsítások görbéje által okozott eltérések is teljesen jól láthatóak. A Gecko 128-as tárolója is látható, mivel a grafikonon látható, hogy 128-nál nagyobb eltérésnél lekapcsol.
Nekem ennyi elég volt ahhoz hogy elhiggyem így viselkedik egy léptetőmotor. A grafikonon is lehet látni a mikrolépés jótékony hatását, sokkal finomabban jár a motor. Lehet, hogy nincs is elvi hiba a grafikonon? Persze lehet hogy tévedek...
Van 4 tengelye, és mindegyikre köthetek enkódert, vagy stepdir jelet. Mindegyik tengelynek van egy regisztere amiben tárolja az impulzusok számát. 0-ról indulunk, és ha érkezik egy jel akkor hozzáadja a regiszterhez vagy levonja a regiszterből, attól függ merre megy... Ezt a számítógép kikapcsolásáig tárolja, de felül is írhatom bármikor.
Na ebből veszek mintát 1ms-onként, ami az enkóder pillanatnyi értékét fogja mutatni, illetve, hogy a step jel hol tart. A mintavételezés csak annyiból áll, hogy eltárolom egy tömbben a későbbi feldolgozáshoz, de akár ki is vonhatom ott helyben, 1ms alatt rengeteg dolgot lehet csinálni...
Miután vége a "felvételnek" kivonom a két tömbben ugyanazon indexű értékeket. Ezt most egy kicsit átírtam, hogy ne nézzen ki úgy mintha sietne...
Ugye a két mintavételezés között a kártya tovább számolta a jeleket, itt történik egy kis veszteség, mert itt ugye a két pont közé én csak egy egyenest tudok húzni. Ez nem is veszteség, inkább pontatlanság, mert ugye megszámolta a kártya azokat a jeleket is, de nincs rajta a grafikonon. Ennyi pontatlanság nem változtat a jellegen!!
Én "elég" korrektnek tartom ezt a mérést, és szervóknál már bizonyított. Ha lehet hallani kis rezgéseket menet közben, akkor az a grafikonon egyből megjelenik, ha megállásnál nagyon sok a lengés, amit már szemmel is lehet látni, akkor az a grafikonon is látható. A különböző gyorsítások görbéje által okozott eltérések is teljesen jól láthatóak. A Gecko 128-as tárolója is látható, mivel a grafikonon látható, hogy 128-nál nagyobb eltérésnél lekapcsol.
Nekem ennyi elég volt ahhoz hogy elhiggyem így viselkedik egy léptetőmotor. A grafikonon is lehet látni a mikrolépés jótékony hatását, sokkal finomabban jár a motor. Lehet, hogy nincs is elvi hiba a grafikonon? Persze lehet hogy tévedek...
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 16, 00:34
Írta: 3k74cecek Dátum 2008 december 16, 00:34
"van egy regisztere amiben tárolja az impulzusok számát."
Így már értem az általad piros step jelnek nevezett jelet.
Erre én azt mondtam volna, hogy a diagramon a kiadott step jelek száma látható, nem pedig a step jel. A kettő ugyanis egészen más. Én step jelnek négyszög jelet vártam, és nem értettem a lassan emelkedő egyenest.
Most már kb. értem a mérés működését, viszont továbbra is azt mondom, hogy az 1ms-es mintavételezés nagyon ritka.
500-as fordulat esetén, csak minden 66. enkóder jelnél fenálló állapotot látod (4*2000 esetén). Ez a motornál 3 foknyi elfordulásnak felel meg.
Ez már majdnem két egész lépést jelent. A méréseddel tehát lehetetlen a lépésen belüli késés jellegét bemutatni.
Véletlenszerüen és ritkán veszel ki értékeket és ezeket összekötve egy egyenessel, teljesen hamis lesz a kép.
Talán megérted ha végiggondolod a következő gondolatmenetet.
Érthetetlen, hogy az induláskor a hiba miért szép lassan növekszik a nulláról indulva.
Amikor megjön az első step jel, és a motor még meg se moccant, akkor a hiba rögtön egy mikrolépésnyi. Ezt azt hiszem elfogadod. Ez viszont nem látszik a képeiden. Ez szerintem valószinűleg a túl ritka mintavételezés miatt van, de lehet szoftver hiba is. De mindenképpen hibája a jelleggörbének. Nem tudom, hogy a kiértékelő programod ezt helyesen számolja-e, vagyis 1 step jel és nulla enkóder jel az egy mikrolépésnyi hibát jelent-e. Ezután elindul a forgórész és a hiba szépen csökken. Ha addig nem jön újabb step jel, amig a forgórész be nem áll a kivánt pozicióba, akkor a hiba szépen nullára csökken, esetleg előjelet is vált ha kicsit túllendül a forgórész. Még egy két lengés is lehet, de az egyszerűség kedvéért most ettől tekintsünk el. Ha a következő step jel mindíg ezután jön, akkor a hibára egy fűrészjelszerű jelsorozatot kell kapnunk. Ha te ebből az állandó aplitúdójú és állandó szintű (mert mindíg nulla és egy mikrolépésnyi között lesz) jelsorozatból, fordulattól függően kb. minden 50-100-dik periódus véletlenszerű poziciójában (mert a mintavételezés nincs szinkronban a jellel) veszel mintát és ezeket az értékeket összekötöd egy egyenessel akkor azt hiszem belátod, hogy a valóságtól teljesen eltérő jelleget fogsz kapni.
A mintavételezésed értéke mindíg nulla és egy mikrolépésnyi között lesz, viszont a jellege garantáltan nem adja vissza a valós frekvenciájű fűrész jelet, hiszen csak minden 50-100 periódust látod, így a legideálisabb esetben is 50-100-ad akkora frekvenciának fogod látni. Ezen belül aztán bármilyen jelleg is adódhat, de az már nem a valóságos.
Ha viszont hamarabb jön step jel, akkor az előző step jelből még meglévő hibához hozzáadódik egy újabb mikrolépésnyi hiba. Tehát a hiba már nagyobb lesz mint az indulás pillanatában volt. A növekedés persze nem minden határon túli, amíg a motor határfordulatszáma alatt vagyunk, mert a késéssel nő a nyomaték és beáll az egyensúly. Viszont ebben az esetben sosem fog lemenni nulláig a hiba.
A mérésed annál kisebb hibalengést fog mutatni állandó fordulatszámon, minél közelebb áll a valódi lengés periódusidejének egész számú többszöröse a mintavételi idődhöz. Vagyis minél inkább szinkronba kerül a mintavételed a jelhez. A hiba értéke viszont a valódi amplitúdón belül akármennyi is lehet.
Remélem sikerült elmagyaráznom, hogy miért nem elég az 1ms mintavételezés.
Így már értem az általad piros step jelnek nevezett jelet.
Erre én azt mondtam volna, hogy a diagramon a kiadott step jelek száma látható, nem pedig a step jel. A kettő ugyanis egészen más. Én step jelnek négyszög jelet vártam, és nem értettem a lassan emelkedő egyenest.
Most már kb. értem a mérés működését, viszont továbbra is azt mondom, hogy az 1ms-es mintavételezés nagyon ritka.
500-as fordulat esetén, csak minden 66. enkóder jelnél fenálló állapotot látod (4*2000 esetén). Ez a motornál 3 foknyi elfordulásnak felel meg.
Ez már majdnem két egész lépést jelent. A méréseddel tehát lehetetlen a lépésen belüli késés jellegét bemutatni.
Véletlenszerüen és ritkán veszel ki értékeket és ezeket összekötve egy egyenessel, teljesen hamis lesz a kép.
Talán megérted ha végiggondolod a következő gondolatmenetet.
Érthetetlen, hogy az induláskor a hiba miért szép lassan növekszik a nulláról indulva.
Amikor megjön az első step jel, és a motor még meg se moccant, akkor a hiba rögtön egy mikrolépésnyi. Ezt azt hiszem elfogadod. Ez viszont nem látszik a képeiden. Ez szerintem valószinűleg a túl ritka mintavételezés miatt van, de lehet szoftver hiba is. De mindenképpen hibája a jelleggörbének. Nem tudom, hogy a kiértékelő programod ezt helyesen számolja-e, vagyis 1 step jel és nulla enkóder jel az egy mikrolépésnyi hibát jelent-e. Ezután elindul a forgórész és a hiba szépen csökken. Ha addig nem jön újabb step jel, amig a forgórész be nem áll a kivánt pozicióba, akkor a hiba szépen nullára csökken, esetleg előjelet is vált ha kicsit túllendül a forgórész. Még egy két lengés is lehet, de az egyszerűség kedvéért most ettől tekintsünk el. Ha a következő step jel mindíg ezután jön, akkor a hibára egy fűrészjelszerű jelsorozatot kell kapnunk. Ha te ebből az állandó aplitúdójú és állandó szintű (mert mindíg nulla és egy mikrolépésnyi között lesz) jelsorozatból, fordulattól függően kb. minden 50-100-dik periódus véletlenszerű poziciójában (mert a mintavételezés nincs szinkronban a jellel) veszel mintát és ezeket az értékeket összekötöd egy egyenessel akkor azt hiszem belátod, hogy a valóságtól teljesen eltérő jelleget fogsz kapni.
A mintavételezésed értéke mindíg nulla és egy mikrolépésnyi között lesz, viszont a jellege garantáltan nem adja vissza a valós frekvenciájű fűrész jelet, hiszen csak minden 50-100 periódust látod, így a legideálisabb esetben is 50-100-ad akkora frekvenciának fogod látni. Ezen belül aztán bármilyen jelleg is adódhat, de az már nem a valóságos.
Ha viszont hamarabb jön step jel, akkor az előző step jelből még meglévő hibához hozzáadódik egy újabb mikrolépésnyi hiba. Tehát a hiba már nagyobb lesz mint az indulás pillanatában volt. A növekedés persze nem minden határon túli, amíg a motor határfordulatszáma alatt vagyunk, mert a késéssel nő a nyomaték és beáll az egyensúly. Viszont ebben az esetben sosem fog lemenni nulláig a hiba.
A mérésed annál kisebb hibalengést fog mutatni állandó fordulatszámon, minél közelebb áll a valódi lengés periódusidejének egész számú többszöröse a mintavételi idődhöz. Vagyis minél inkább szinkronba kerül a mintavételed a jelhez. A hiba értéke viszont a valódi amplitúdón belül akármennyi is lehet.
Remélem sikerült elmagyaráznom, hogy miért nem elég az 1ms mintavételezés.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 16, 00:46
Írta: s7manbs8 Dátum 2008 december 16, 00:46
itt a mintavétel olyan ritka, mintha egy cintányér hangját akarnánk jó minőségben felvenni egy telefonkagylóval, valahogy nem ad visza minden információt a jelről
Cím: Re:Léptetőmotor
Írta: fs9s63xkf Dátum 2008 december 16, 11:01
Írta: fs9s63xkf Dátum 2008 december 16, 11:01
Ezt én mind értem de...
Vegyük az első esetet, amikor van ideje beállni a motornak két step jel között:
Nézzük a 8000-es mikrolépéssel készült képeket, miért nem látszik ezen, hogy az első step jel hatására 1 eltérés keletkezik? Ahol látod a képeken az első eltérést, na ott kezdődik a mozgás, előtte 0 eltérés van hisz áll a motor,a mozgásnak meg akkor van vége amikor már 0 az eltérés illetve természetesen egy kicsit előtte. Természetesen a kép elején nem rögtön kezdődik a mozgás, valamennyi időt a mozgás előtt és után is fel kell venni, hogy rendesen lehessen látni a mozgás kezdetét, végét.
Itt ugye nem fogok minden egyes fűrészjelet látni, csak minden 50-100-adikat, de nem is érdekel mindegyik! Ha már azt látom, hogy mozog a motor, nem mindig 0-án áll akkor az nekem már bőven elég.
A másik eset, amikor hamarabb jön a step jel, akkor Te is írtad, hogy beáll az egyensúly, és egy adott sebességnél egy adott értékű eltérést tapasztalok. Ez is látszik a képen, a gyorsítás és lassítás között állandó sebesség mellett kb állandó az eltérés is. Itt is igaz, az hogy nem látok minden tüskét csak minden 50-100-adikat, de itt szintén nem érdekel annyira pontosan. Az biztos, hogy 500-as fordulaton, kb 26 eltérést produkál, míg 1200-as fordulaton kb 55 eltérést. Ez biztos, hisz azokban a milliszekundumokban amikor megnéztem, akkor ennyi eltéréseket mértem. Ezen kívül ugye nem látom a köztes pontokat, ez azt jelenti hogy két 26-os eltérés között még lehetett 30 eltérés is vagy mondjuk 15, de a 26 az biztos. Egyébként sem egy egyenes vonalat kaptam a 26-os eltérésnél hanem ingadozott 22 és 26 között.
Ha tényleg olyan kevés lenne a mintavételezési idő, akkor ha megismétlem a mérést teljesen más eredményeket kapnék hiszen az 1ms nem mindig ugyan oda esik. Viszont ha én 20szor megismétlem az 500-as fordulaton a kísérletet, akkor 20szor azt fogom kapni, hogy az eltérések csúcsértéke 25-26-27 körül lesz. Ez szerintem több mint meggyőző, ilyen mázlim nem lehet :) És ha a fordulatszámot növelem vagy csökkentem akár 50rpm-el akkor látszik, hogy az eltérés 2-3 értékkel csökkent vagy növekedett az 500rpm-hez képest.
Vegyük az első esetet, amikor van ideje beállni a motornak két step jel között:
Nézzük a 8000-es mikrolépéssel készült képeket, miért nem látszik ezen, hogy az első step jel hatására 1 eltérés keletkezik? Ahol látod a képeken az első eltérést, na ott kezdődik a mozgás, előtte 0 eltérés van hisz áll a motor,a mozgásnak meg akkor van vége amikor már 0 az eltérés illetve természetesen egy kicsit előtte. Természetesen a kép elején nem rögtön kezdődik a mozgás, valamennyi időt a mozgás előtt és után is fel kell venni, hogy rendesen lehessen látni a mozgás kezdetét, végét.
Itt ugye nem fogok minden egyes fűrészjelet látni, csak minden 50-100-adikat, de nem is érdekel mindegyik! Ha már azt látom, hogy mozog a motor, nem mindig 0-án áll akkor az nekem már bőven elég.
A másik eset, amikor hamarabb jön a step jel, akkor Te is írtad, hogy beáll az egyensúly, és egy adott sebességnél egy adott értékű eltérést tapasztalok. Ez is látszik a képen, a gyorsítás és lassítás között állandó sebesség mellett kb állandó az eltérés is. Itt is igaz, az hogy nem látok minden tüskét csak minden 50-100-adikat, de itt szintén nem érdekel annyira pontosan. Az biztos, hogy 500-as fordulaton, kb 26 eltérést produkál, míg 1200-as fordulaton kb 55 eltérést. Ez biztos, hisz azokban a milliszekundumokban amikor megnéztem, akkor ennyi eltéréseket mértem. Ezen kívül ugye nem látom a köztes pontokat, ez azt jelenti hogy két 26-os eltérés között még lehetett 30 eltérés is vagy mondjuk 15, de a 26 az biztos. Egyébként sem egy egyenes vonalat kaptam a 26-os eltérésnél hanem ingadozott 22 és 26 között.
Ha tényleg olyan kevés lenne a mintavételezési idő, akkor ha megismétlem a mérést teljesen más eredményeket kapnék hiszen az 1ms nem mindig ugyan oda esik. Viszont ha én 20szor megismétlem az 500-as fordulaton a kísérletet, akkor 20szor azt fogom kapni, hogy az eltérések csúcsértéke 25-26-27 körül lesz. Ez szerintem több mint meggyőző, ilyen mázlim nem lehet :) És ha a fordulatszámot növelem vagy csökkentem akár 50rpm-el akkor látszik, hogy az eltérés 2-3 értékkel csökkent vagy növekedett az 500rpm-hez képest.
Cím: Re:Léptetőmotor
Írta: fs9s63xkf Dátum 2008 december 16, 11:03
Írta: fs9s63xkf Dátum 2008 december 16, 11:03
Nagy különbség, hogy én nem jó minőségben akarom felvenni, hanem csak azt akarom megállapítani, hogy cintányérról van-e szó, illetve hogy egyáltalán van-e valamilyen hang. Erre a telefon is alkalmas, ha már nincs más...
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 16, 11:25
Írta: 3k74cecek Dátum 2008 december 16, 11:25
"Ezt én mind értem de... "
Amint látom nem érted.
Most már meg kell, hogy kérdezzem, hogy milyen végzettséged van, hogy legyen valami támpontom, nehogy a 2*2-vel kezdjem és az a vád érjen részedről "hogy ennyire amatőrnek nézlek". Túl magasan sem akarom magyarázni, mert akkor meg az lesz a baj. Szeretném ha megértenéd, hogy a kirajzolt jelleggörbédnek semmi köze a valósághoz.
Hangsúlyozom a jelleggörbét ! A mérési pontok mind előfordulnak a valóságban, csak az azokból kirajzolt görbéd teljesen más, mert véletlenszerűen TÚL RITKÁN vettél ki pontokat. Ezáltal viszont a motor működésére levont következtetés is hamis lesz.
Majd ha megérted a dolog lényegét (ha sikerül a megfelelő szinten elmagyaráznom), akkor rájössz, hogy mennyire becsaptad magadat.
Amint látom nem érted.
Most már meg kell, hogy kérdezzem, hogy milyen végzettséged van, hogy legyen valami támpontom, nehogy a 2*2-vel kezdjem és az a vád érjen részedről "hogy ennyire amatőrnek nézlek". Túl magasan sem akarom magyarázni, mert akkor meg az lesz a baj. Szeretném ha megértenéd, hogy a kirajzolt jelleggörbédnek semmi köze a valósághoz.
Hangsúlyozom a jelleggörbét ! A mérési pontok mind előfordulnak a valóságban, csak az azokból kirajzolt görbéd teljesen más, mert véletlenszerűen TÚL RITKÁN vettél ki pontokat. Ezáltal viszont a motor működésére levont következtetés is hamis lesz.
Majd ha megérted a dolog lényegét (ha sikerül a megfelelő szinten elmagyaráznom), akkor rájössz, hogy mennyire becsaptad magadat.
Cím: Re:Léptetőmotor
Írta: fs9s63xkf Dátum 2008 december 16, 12:20
Írta: fs9s63xkf Dátum 2008 december 16, 12:20
Jelenleg harmadéves vagyok a Budapesti Műszaki Főiskola Mérnök Informatika szakán...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 16, 13:08
Írta: 000000000 Dátum 2008 december 16, 13:08
Borítékolnám, hogy nem lehet arról meggyőzni, hogy 3+2 az nem kilenc.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 16, 13:30
Írta: 3k74cecek Dátum 2008 december 16, 13:30
Akkor valószínűleg találkoztál más a Shannon mintavételi törvénnyel, méréstechnika vagy valami más tantárgy kapcsán (legalábbis remélem, hogy egy ilyen fontos dolog nem maradt ki a tantervből, még az informatikusoknál sem). Ha mégse botlottál bele, akkor javaslom, hogy nézzél utána, vagy kérdezd meg valakitől (a neten is van rengeteg anyag róla). Biztosan fogsz olyan ábrát találni evvel kapcsolatban amin jól bemutatják, hogy egy a kelleténél ritkábban mintavételezett jel mennyire más jelleget mutat mint az eredeti.
Így például nem vonhatsz le olyan következtetést sem, hogy az eltérés egyenes arányos a sebességgel. Szerencsétlen esetben még olyan ábrát is kaphatsz a ritka mintavételezés miatt, ami ennek pont az ellenkezőjét mutatja a görbe egy szakaszán. Persze ez nem igaz, de ha vakon hiszel a görbéidnek, akkor ezt kellene mondanod.
Még abban sem lehetsz biztos, hogy a méréseddel a maximális hibát sikerült lemérned. Egyben lehetsz csak biztos, hogy volt olyan nagyságú hiba, mint amit mértél. De az lehet, hogy a legkisebb volt, de az is lehet, hogy a legnagyobb. Az időbeli lefolyásáról pedig semmit sem mondhatsz a mérésed alapján, mert túl ritkán vettél mintákat.
Ez egy elég becsapós része a mintavételezéses méréstechnikának, ha valaki nincs tisztában avval, hogy ez mit okozhat a mérésben.
Majd ha utána néztél, jól megrágtad, és megértetted, akkor térjünk vissza a dologra, mert addig hiába győzködlek. Nincs időm a dologról tankönyvszintű irományt összeállítani. Megtették ezt már mások nálam sokkal érthetőbben.
Így például nem vonhatsz le olyan következtetést sem, hogy az eltérés egyenes arányos a sebességgel. Szerencsétlen esetben még olyan ábrát is kaphatsz a ritka mintavételezés miatt, ami ennek pont az ellenkezőjét mutatja a görbe egy szakaszán. Persze ez nem igaz, de ha vakon hiszel a görbéidnek, akkor ezt kellene mondanod.
Még abban sem lehetsz biztos, hogy a méréseddel a maximális hibát sikerült lemérned. Egyben lehetsz csak biztos, hogy volt olyan nagyságú hiba, mint amit mértél. De az lehet, hogy a legkisebb volt, de az is lehet, hogy a legnagyobb. Az időbeli lefolyásáról pedig semmit sem mondhatsz a mérésed alapján, mert túl ritkán vettél mintákat.
Ez egy elég becsapós része a mintavételezéses méréstechnikának, ha valaki nincs tisztában avval, hogy ez mit okozhat a mérésben.
Majd ha utána néztél, jól megrágtad, és megértetted, akkor térjünk vissza a dologra, mert addig hiába győzködlek. Nincs időm a dologról tankönyvszintű irományt összeállítani. Megtették ezt már mások nálam sokkal érthetőbben.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 16, 14:07
Írta: 3k74cecek Dátum 2008 december 16, 14:07
Jaj de rosszindulatú, csúnya bácsi vagy. [#nevetes1]
Cím: Re:Léptetőmotor
Írta: fs9s63xkf Dátum 2008 december 16, 14:31
Írta: fs9s63xkf Dátum 2008 december 16, 14:31
Hogyne hallottam volna Shannon bácsiról, már a szakközépbe is tanultuk, meg a főiskolán is, sőt magamtól is utánajártam még mielőtt tanultam volna... Tudom, hogy kétszeres frekvenciával kéne vizsgálni... Azt is értem, hogy milyen problémákat okozhat. Az eltérés grafikon nem egy 66kHz-es szinusz hanem egy jóval lomhább "valami". A léptetőmotor az egy igen lomha állatfaj.
Végeztem pár mérés azért nagyobb frekvenciával is, csak hogy megnyugodjak. Késleltetés nélkül folyamatosan vettem a mintákat, ez kb 7us-os mintavételezési időt jelent, ami 137500 minta/sec, ami véletlenül kb a duplája a 66666 enkóder impulzus / sec-nak. A mozgás itt is 500rpm, 100ms-os gyorsítás lassítás, de itt nincs visszafele mozgás. Ez lett belőle:

Eredeti kép!
Javíts ki ha tévednék, de ez kb ugyan úgy néz ki, mint amit 1ms-al kaptam. A mozgás grafikonja 110000-pöttyből lett előállítva! Azok a lenyúló tüskék valószínüleg a kártya regiszterének kiolvasásának a hibája, ilyen sűrű metódushívás okozhat problémákat nála. Meg aztán ilyen dinamikára egy léptető nem képes :)
1200-as fordulattal is ugyan olyan eredményt kaptam.
Ennél többet nem tudok tenni, szerintem ez változatlanul egy elfogadható görbe egy léptetőmotornál.
Végeztem pár mérés azért nagyobb frekvenciával is, csak hogy megnyugodjak. Késleltetés nélkül folyamatosan vettem a mintákat, ez kb 7us-os mintavételezési időt jelent, ami 137500 minta/sec, ami véletlenül kb a duplája a 66666 enkóder impulzus / sec-nak. A mozgás itt is 500rpm, 100ms-os gyorsítás lassítás, de itt nincs visszafele mozgás. Ez lett belőle:
Eredeti kép!
Javíts ki ha tévednék, de ez kb ugyan úgy néz ki, mint amit 1ms-al kaptam. A mozgás grafikonja 110000-pöttyből lett előállítva! Azok a lenyúló tüskék valószínüleg a kártya regiszterének kiolvasásának a hibája, ilyen sűrű metódushívás okozhat problémákat nála. Meg aztán ilyen dinamikára egy léptető nem képes :)
1200-as fordulattal is ugyan olyan eredményt kaptam.
Ennél többet nem tudok tenni, szerintem ez változatlanul egy elfogadható görbe egy léptetőmotornál.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 16, 15:03
Írta: s7manbs8 Dátum 2008 december 16, 15:03
na ennek az álló helyzetében, hasonló pwm gerjesztés által előálló apró mozgások kisebb frekvenciájú összetevőjét lehet szépen hallani füllel is, ami egyeseket zavarni szokott.
Nyilván a nagyobb frekvenciájú összetevők elég kismértékűek, a mechanika nem olyan dinamikájú, még kisebb motoroknál is pár kHz fölött, már erősen kismértékű a mozgás lehetősége. Ezért kis mintavételezési frekvenciával a valóságos görbe nagyját és szélsőértékeit elég jól visszaadja így is.
Nyilván a nagyobb frekvenciájú összetevők elég kismértékűek, a mechanika nem olyan dinamikájú, még kisebb motoroknál is pár kHz fölött, már erősen kismértékű a mozgás lehetősége. Ezért kis mintavételezési frekvenciával a valóságos görbe nagyját és szélsőértékeit elég jól visszaadja így is.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 16, 15:13
Írta: 000000000 Dátum 2008 december 16, 15:13
Ugyan. Dehogy!
Szerintem nem a mért érték, vagy annak helyessége volt számára a fontos. Hanem, a görbéhez kerekített egy ideológiát. Azzal a mérési elrendezéssel lehetne generálni az eheti nyerőszámokat is.
Szerintem nem a mért érték, vagy annak helyessége volt számára a fontos. Hanem, a görbéhez kerekített egy ideológiát. Azzal a mérési elrendezéssel lehetne generálni az eheti nyerőszámokat is.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 16, 18:18
Írta: 000000000 Dátum 2008 december 16, 18:18
Nem voltam itt egy kicsit, most látom, parázs
vita alakult ki Szigma és Psychobilly között.
Amennyire így hirtelen átolvastam a vitát,
alapvetően Psychobillynek van igaza.
Ugyanis méréseivel jellegében rámutatott arra az
elméletileg is igazolható jelenségre, hogyan
működik a léptecs, mint nyilthurkú hajtás,
és hogyan egy szervo, mint visszacsatolt
rendszer, és mi a különbség a pozicionálási
hibák tekintetében.
Azt Ő is elismerte, hogy kicsit nagyvonalú
dolog egy egyenessel összekötni 1 ms
mintavétnél a pontokat, de ha tényleg korrekt a
mozgáskártya és a lekérdezések (imitt amott
voltak kiugrások..., de ahogyan mondta, ez
valószínűleg ritkán előforduló kiolvasási hiba),
összerendezése, akkor kár idekeverni a
mintavételi sebességet. Ehhez a méréshez
a tendencia kimutatására elég az 1 ms, és
figyelembe kell venni azt is, hogy másképp nem
fér el egy képernyőn a teljes felvétel.
Én megköszönöm inkább a fáradozását, és
sajnos picit abba a csapdába esett, amibe én
már sokszor itt a Fórumon, picit bonyolult
dologgal áll elő, és nem mindenki érti meg
első nekifutásra, hanem inkább vitázik vele.
De nem baj, majd megedződik.:))
vita alakult ki Szigma és Psychobilly között.
Amennyire így hirtelen átolvastam a vitát,
alapvetően Psychobillynek van igaza.
Ugyanis méréseivel jellegében rámutatott arra az
elméletileg is igazolható jelenségre, hogyan
működik a léptecs, mint nyilthurkú hajtás,
és hogyan egy szervo, mint visszacsatolt
rendszer, és mi a különbség a pozicionálási
hibák tekintetében.
Azt Ő is elismerte, hogy kicsit nagyvonalú
dolog egy egyenessel összekötni 1 ms
mintavétnél a pontokat, de ha tényleg korrekt a
mozgáskártya és a lekérdezések (imitt amott
voltak kiugrások..., de ahogyan mondta, ez
valószínűleg ritkán előforduló kiolvasási hiba),
összerendezése, akkor kár idekeverni a
mintavételi sebességet. Ehhez a méréshez
a tendencia kimutatására elég az 1 ms, és
figyelembe kell venni azt is, hogy másképp nem
fér el egy képernyőn a teljes felvétel.
Én megköszönöm inkább a fáradozását, és
sajnos picit abba a csapdába esett, amibe én
már sokszor itt a Fórumon, picit bonyolult
dologgal áll elő, és nem mindenki érti meg
első nekifutásra, hanem inkább vitázik vele.
De nem baj, majd megedződik.:))
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 16, 18:47
Írta: 3k74cecek Dátum 2008 december 16, 18:47
Csináljál légyszives néhány mérést, mert valamit nagyon nem értek.
A következő paraméterekkel végezd a méréseket:
1. 1ms mintavétel, álló helyzetből 20 ms gyorsítási szakasz 200 fordulat/min-re, rövid 200 fordulatos rész, gyorsító szakasz nélkül 500 fordulatra,
rövid 500 fordulatos rész, lassító szakasz nélkül megállás (remélem bírni fogja a motor lépésvesztés nélkül)
2. mint az előző (1), de 7us mintavételezéssel
3. 1ms mintavétel, álló helyzetből 0.5 s (nem tudom mennyi időt tudsz tárolni) gyorsítási szakasz 50 fordulat/min-re, rövid 50 fordulatos rész. Többi nem érdekes, akáhogy megállhat, vagy nem is kel a mérés további része.
4. Mint a (3), de 7us mintavételezéssel
Ha meg tudod csinálni, akkor kérnék a #1687-beli képről (vagy legalább az elejéről, akár több részletben is) egy akkora nagyítást amin beazonosíthatók a mérési pontok.
Remélem ezekből rájövök miért nem azt kapod amit várok.
Add meg még légyszives a motor adatait is.
Addig meg töröm a fejem, mert itt valami sántít.
A következő paraméterekkel végezd a méréseket:
1. 1ms mintavétel, álló helyzetből 20 ms gyorsítási szakasz 200 fordulat/min-re, rövid 200 fordulatos rész, gyorsító szakasz nélkül 500 fordulatra,
rövid 500 fordulatos rész, lassító szakasz nélkül megállás (remélem bírni fogja a motor lépésvesztés nélkül)
2. mint az előző (1), de 7us mintavételezéssel
3. 1ms mintavétel, álló helyzetből 0.5 s (nem tudom mennyi időt tudsz tárolni) gyorsítási szakasz 50 fordulat/min-re, rövid 50 fordulatos rész. Többi nem érdekes, akáhogy megállhat, vagy nem is kel a mérés további része.
4. Mint a (3), de 7us mintavételezéssel
Ha meg tudod csinálni, akkor kérnék a #1687-beli képről (vagy legalább az elejéről, akár több részletben is) egy akkora nagyítást amin beazonosíthatók a mérési pontok.
Remélem ezekből rájövök miért nem azt kapod amit várok.
Add meg még légyszives a motor adatait is.
Addig meg töröm a fejem, mert itt valami sántít.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 16, 18:58
Írta: 000000000 Dátum 2008 december 16, 18:58
Figyelj ide Szigma! Szegény "gyereknek" vizsgaidőszaka
van, ne nyúzzad már a saját értetlenséged miatt,
nem hiszem, hogy erre most sok ideje legyen.
Tulajdonképpen mi a fő bajod, kifgoásod a
lényeget tekintve?
Vitatod azt, hogy egy léptecs egyre jobban
lemarad, azaz növekszik a pozicióhibája, ha
növekszik a szögsebessége?
Mert a kisebb hibáktól-pontatlanságoktól
eltekintve ez a mérési digramok lényege.
Vagy szerinted nem ez?
van, ne nyúzzad már a saját értetlenséged miatt,
nem hiszem, hogy erre most sok ideje legyen.
Tulajdonképpen mi a fő bajod, kifgoásod a
lényeget tekintve?
Vitatod azt, hogy egy léptecs egyre jobban
lemarad, azaz növekszik a pozicióhibája, ha
növekszik a szögsebessége?
Mert a kisebb hibáktól-pontatlanságoktól
eltekintve ez a mérési digramok lényege.
Vagy szerinted nem ez?
Cím: Re:Léptetőmotor
Írta: fs9s63xkf Dátum 2008 december 16, 19:40
Írta: fs9s63xkf Dátum 2008 december 16, 19:40
Sorry, de egyenlőre nem érek rá, ha vége a vizsgaidőszaknak, akkor lehet róla szó.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 december 16, 20:28
Írta: svejk Dátum 2008 december 16, 20:28
Valaki össze tudná foglalni pár mondatban a #1629-óta lezajlott dolgokat?
Miért is kellett ez a mérés?
ennyit nem tudok hirtelenben elovasni és főleg felfogni :(
Az tény hogy a léptető is késni kezd a terhelőnyomaték növekedésével és egy idő után jön a lépésvesztés.
Az is igaz mint ahogy írta is Szigma hogy ilyenkor gyakorlatilag egyből 4 lépést veszt.
(valaki fel is vetette nemrég az ötletet hogy gerjesztet léptetőmoci jó lenne kézi tekerő arretálásának, ez így is van egy 200 lépése moci egy tekercsét gerjesztve 50 határozott állása lesz)
Az is igaz hogy oda vissza járáskor a lépésvesztés(ek) kiegyenlíthetik egymást és a nullára futás pontos lehet.
De igazából ez füllel is azonnal kihalható
Miért is kellett ez a mérés?
ennyit nem tudok hirtelenben elovasni és főleg felfogni :(
Az tény hogy a léptető is késni kezd a terhelőnyomaték növekedésével és egy idő után jön a lépésvesztés.
Az is igaz mint ahogy írta is Szigma hogy ilyenkor gyakorlatilag egyből 4 lépést veszt.
(valaki fel is vetette nemrég az ötletet hogy gerjesztet léptetőmoci jó lenne kézi tekerő arretálásának, ez így is van egy 200 lépése moci egy tekercsét gerjesztve 50 határozott állása lesz)
Az is igaz hogy oda vissza járáskor a lépésvesztés(ek) kiegyenlíthetik egymást és a nullára futás pontos lehet.
De igazából ez füllel is azonnal kihalható
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 16, 20:34
Írta: 3k74cecek Dátum 2008 december 16, 20:34
Nem kívántam veled vitatkozni, mert nem a te méréseddel nem értek egyet, de ha már így megszólítottál akkor reagálok:
Nem hiszem, hogy psychobillynek szüksége lenne arra, hogy te osszad be az idejét.
Gondolom van annyira nagy fiú, hogy eldöntse, van-e ideje a tanulmányai mellett a fórummal foglalkozni, vagy sem.
Az eddigiek azt mutatták, hogy van ideje.
Viszont ha mégsem, akkor majd megírja, hogy x nap múlva tud eleget tenni a kérésemnek, mert éppen vizsgára készül.
Isten bizony nem fogok megsértődni ezért.
---
"ne nyúzzad már a saját értetlenséged miatt,"
Irigyellek, hogy te ezek szerint úgy születtél, hogy minden tudás rögtön a fejedben volt, és sosem kerültél olyan helyzetbe
ahol valamit nagyon nem értettél, és egy kiadós érvcsata gyújtott fényt a fejedben, vagy győzted meg a partnert, hogy Ő tévedett.
Eddig azt hittem, hogy egy ilyen fórumon szabad ilyet csinálni.
De ha te eltiltasz ettől, akkor majd abbahagyom mihelyt kiderül, hogy te vagy a lista felügyelője.
---
" méréseivel jellegében rámutatott arra..... hogyan
működik a léptecs, mint nyilthurkú hajtás,
és hogyan egy szervo, mint visszacsatolt
rendszer, és mi a különbség a pozicionálási
hibák tekintetében. "
Hogy te mi mindent tudsz kiolvasni azokból a képekből. Irigyellek.
Én ezekből a képekből nem láttam hogyan működik a léptecs, meg a szervó.
Az egy dolog, hogy máshonnan vannak ismereteim, de ezekből ugyan semmit sem tudtam meg erről.
Láttam görbéket, amiken vannak számomra érthetelen dolgok, és egyenlőre senki sem adott rá magyarázatot.
Ugyanis én a "csak"-nak nem hiszek. Sőt még egy szép görbének sem, ha ez helyenként ellentmond az én ismereteimnek.
Nekem ész érvek kellenek, de eddig ilyet nem kaptam.
---
"Tulajdonképpen mi a fő bajod, kifgoásod a lényeget tekintve? "
Ezek szerint eddig nem olvastad el figyelmesen a levélváltásainkat, ha ezt most megkérdezed.
Akkor viszont nem tudom minek alapján mondtad, hogy "alapvetően Psychobillynek van igaza."
Ez amolyan isteni kinyilatkoztatás ?
Ha elolvasod figyelmesen az eddigi levélváltásainkat akkor megkapod a választ.
Ha esetleg nem derülne ki, akkor meg kár újra leírnom.
Én eddig még nem kaptam választ rá, ezért szeretném kideríteni psychobilly segítségével (amennyiben van rá ideje meg kedve).
A végén még az is kiderülhet, hogy hiányosak voltak az eddigi ismerteim e tárgyban, és akkor megköszönöm annak aki erről meg tud győzni.
A te érved viszont komolytalan az 1ms mintavétel indoklására, miszerint
"figyelembe kell venni azt is, hogy másképp nem fér el egy képernyőn a teljes felvétel. "
Most vagy nem értesz a számítógépekhez, ha neked ez elég indoknak vagy magyarázatnak, vagy csak blöfföltél, hátha a te szavad "puszta súlya"
elég a meggyőzésemre. Egyik sem szerencsés változat. Nem győzőtt meg.
-----
"de ha tényleg korrekt a mozgáskártya és a lekérdezések"
Nocsak, azért vannak fenntartásaid? Pár sorral előbb még azt írtad "alapvetően Psychobillynek van igaza"
Én még azt hozzáteszem, hogy vajon jó algoritmussal állítja-e elő az adatokat?
Netán valami más, eddig észre nem vett dolog miatt nem az általam várt a végeredmény.
----
"Én megköszönöm inkább a fáradozását, és.. "
Ez úgy hangzik, mintha én becsméreltem volna amit csinált.
Szerintem nem tettem ilyet.
Az más dolog, hogy megpróbáltam elmagyarázni neki, hogy a görbéje jellegével nem értek egyet, mert szerintem hibás módszerrel állította elő.
Eddig még nem kaptam tőle se magyarázatot, se ész érvet arra, hogy nincs igazam.
Majd elválik melyikünk álláspontja van közelebb a valósághoz.
Nem hiszem, hogy psychobillynek szüksége lenne arra, hogy te osszad be az idejét.
Gondolom van annyira nagy fiú, hogy eldöntse, van-e ideje a tanulmányai mellett a fórummal foglalkozni, vagy sem.
Az eddigiek azt mutatták, hogy van ideje.
Viszont ha mégsem, akkor majd megírja, hogy x nap múlva tud eleget tenni a kérésemnek, mert éppen vizsgára készül.
Isten bizony nem fogok megsértődni ezért.
---
"ne nyúzzad már a saját értetlenséged miatt,"
Irigyellek, hogy te ezek szerint úgy születtél, hogy minden tudás rögtön a fejedben volt, és sosem kerültél olyan helyzetbe
ahol valamit nagyon nem értettél, és egy kiadós érvcsata gyújtott fényt a fejedben, vagy győzted meg a partnert, hogy Ő tévedett.
Eddig azt hittem, hogy egy ilyen fórumon szabad ilyet csinálni.
De ha te eltiltasz ettől, akkor majd abbahagyom mihelyt kiderül, hogy te vagy a lista felügyelője.
---
" méréseivel jellegében rámutatott arra..... hogyan
működik a léptecs, mint nyilthurkú hajtás,
és hogyan egy szervo, mint visszacsatolt
rendszer, és mi a különbség a pozicionálási
hibák tekintetében. "
Hogy te mi mindent tudsz kiolvasni azokból a képekből. Irigyellek.
Én ezekből a képekből nem láttam hogyan működik a léptecs, meg a szervó.
Az egy dolog, hogy máshonnan vannak ismereteim, de ezekből ugyan semmit sem tudtam meg erről.
Láttam görbéket, amiken vannak számomra érthetelen dolgok, és egyenlőre senki sem adott rá magyarázatot.
Ugyanis én a "csak"-nak nem hiszek. Sőt még egy szép görbének sem, ha ez helyenként ellentmond az én ismereteimnek.
Nekem ész érvek kellenek, de eddig ilyet nem kaptam.
---
"Tulajdonképpen mi a fő bajod, kifgoásod a lényeget tekintve? "
Ezek szerint eddig nem olvastad el figyelmesen a levélváltásainkat, ha ezt most megkérdezed.
Akkor viszont nem tudom minek alapján mondtad, hogy "alapvetően Psychobillynek van igaza."
Ez amolyan isteni kinyilatkoztatás ?
Ha elolvasod figyelmesen az eddigi levélváltásainkat akkor megkapod a választ.
Ha esetleg nem derülne ki, akkor meg kár újra leírnom.
Én eddig még nem kaptam választ rá, ezért szeretném kideríteni psychobilly segítségével (amennyiben van rá ideje meg kedve).
A végén még az is kiderülhet, hogy hiányosak voltak az eddigi ismerteim e tárgyban, és akkor megköszönöm annak aki erről meg tud győzni.
A te érved viszont komolytalan az 1ms mintavétel indoklására, miszerint
"figyelembe kell venni azt is, hogy másképp nem fér el egy képernyőn a teljes felvétel. "
Most vagy nem értesz a számítógépekhez, ha neked ez elég indoknak vagy magyarázatnak, vagy csak blöfföltél, hátha a te szavad "puszta súlya"
elég a meggyőzésemre. Egyik sem szerencsés változat. Nem győzőtt meg.
-----
"de ha tényleg korrekt a mozgáskártya és a lekérdezések"
Nocsak, azért vannak fenntartásaid? Pár sorral előbb még azt írtad "alapvetően Psychobillynek van igaza"
Én még azt hozzáteszem, hogy vajon jó algoritmussal állítja-e elő az adatokat?
Netán valami más, eddig észre nem vett dolog miatt nem az általam várt a végeredmény.
----
"Én megköszönöm inkább a fáradozását, és.. "
Ez úgy hangzik, mintha én becsméreltem volna amit csinált.
Szerintem nem tettem ilyet.
Az más dolog, hogy megpróbáltam elmagyarázni neki, hogy a görbéje jellegével nem értek egyet, mert szerintem hibás módszerrel állította elő.
Eddig még nem kaptam tőle se magyarázatot, se ész érvet arra, hogy nincs igazam.
Majd elválik melyikünk álláspontja van közelebb a valósághoz.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 16, 20:39
Írta: 3k74cecek Dátum 2008 december 16, 20:39
"ennyit nem tudok hirtelenben elolvasni és főleg felfogni :( "
Pedig ingyen meglenne a ma esti programod [#vigyor2]
szerintem megérné [#wave]
Pedig ingyen meglenne a ma esti programod [#vigyor2]
szerintem megérné [#wave]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 16, 20:53
Írta: 000000000 Dátum 2008 december 16, 20:53
Lassan lefölözöd Pétert, annyit tudsz a
majdnem semmiről írni:) És közben ráadásul
a vitaparnered is megírta, vizsgára kell
készülnie.
A lényeg a lényeg: szerinted egy léptecs
pozíció lemaradása független a fordulatszámától?
És nem úgy van, amit Psichobilly megállapított
a méréseiből: minél nagyobb a fordulat, annál nagyobb a lemaradása. Ha pedig pl. egy 1.8 fokos
2 fázisú léptető motornál ez eléri a 3.6 fokot,
akkor onnantól kezdve a motor "meghalt"
(ezt a részt pont Te magyaráztad Péternek).
De ha Te másképpen tudod mégis, szíved joga.
majdnem semmiről írni:) És közben ráadásul
a vitaparnered is megírta, vizsgára kell
készülnie.
A lényeg a lényeg: szerinted egy léptecs
pozíció lemaradása független a fordulatszámától?
És nem úgy van, amit Psichobilly megállapított
a méréseiből: minél nagyobb a fordulat, annál nagyobb a lemaradása. Ha pedig pl. egy 1.8 fokos
2 fázisú léptető motornál ez eléri a 3.6 fokot,
akkor onnantól kezdve a motor "meghalt"
(ezt a részt pont Te magyaráztad Péternek).
De ha Te másképpen tudod mégis, szíved joga.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 december 16, 21:03
Írta: svejk Dátum 2008 december 16, 21:03
Csak egy kis pontosítás vagy csak talán kérdés?
A léptető üresjáratban szinkronmotorként üzemel ha jól tudom, tehát inkább a terhelőnyomatéktól függ a lemaradás.
Ezért van az hogy üresben megfelelő ramp görbével igen magas fordulatszám elérhető.
És van ugye az ugynevezett start freki amely fordulatot fel bir venni álló helyzetből, mintegy beugorva a szinkronba.
A léptető üresjáratban szinkronmotorként üzemel ha jól tudom, tehát inkább a terhelőnyomatéktól függ a lemaradás.
Ezért van az hogy üresben megfelelő ramp görbével igen magas fordulatszám elérhető.
És van ugye az ugynevezett start freki amely fordulatot fel bir venni álló helyzetből, mintegy beugorva a szinkronba.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 16, 21:17
Írta: 000000000 Dátum 2008 december 16, 21:17
Nincs itt semmi gond, ugyanis egy szinkron
motor is állandó lemaradásban van, attól még
szinkron.
Pont ezt mérte ki Psichobilly, hogy vajon ez hogyan néz ki az n függvényében egy terheletlen
motornál is, és ez volt ennek az egész mérésnek
a lényege, amit #1694-ben kérdeztél is.
motor is állandó lemaradásban van, attól még
szinkron.
Pont ezt mérte ki Psichobilly, hogy vajon ez hogyan néz ki az n függvényében egy terheletlen
motornál is, és ez volt ennek az egész mérésnek
a lényege, amit #1694-ben kérdeztél is.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 december 16, 21:23
Írta: bmejdz9nu Dátum 2008 december 16, 21:23
[#smile] Akkor max 4 teli lépésnyi az "önkorrekció" max.ja? vagy 2?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 december 16, 21:32
Írta: svejk Dátum 2008 december 16, 21:32
Aha! Értem akkor a mérés miértjét.
De ugye üresjáratban állandó furdulaton szinkronban van, mert ott akkor csak a csapágysúrlódás és a forgórész légellenállása fékezi,ami szerintem e speciális esetben elhanyagolható csúszást erdményez.
Gyorsításkor persze már ott a tehetetlenségi nyomaték, főleg ha még egy orsót is forgat, akkor már oké a csúszás (slip, vagy késés) ezért írtam hogy inkább a nyomatéktól függ.
De ugye üresjáratban állandó furdulaton szinkronban van, mert ott akkor csak a csapágysúrlódás és a forgórész légellenállása fékezi,ami szerintem e speciális esetben elhanyagolható csúszást erdményez.
Gyorsításkor persze már ott a tehetetlenségi nyomaték, főleg ha még egy orsót is forgat, akkor már oké a csúszás (slip, vagy késés) ezért írtam hogy inkább a nyomatéktól függ.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 december 16, 21:33
Írta: svejk Dátum 2008 december 16, 21:33
+- 2 "teli" lépés, azaz féllépéses üzemben pl. +- 4 féllépés.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 december 16, 21:36
Írta: svejk Dátum 2008 december 16, 21:36
Próbáld ki!
Adj egy léptető egyik tekercsére 2-300mA áramot és számold meg a határozott állásokat..
Adj egy léptető egyik tekercsére 2-300mA áramot és számold meg a határozott állásokat..
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 16, 21:59
Írta: 000000000 Dátum 2008 december 16, 21:59
Minden szinkronmotornak, így a léptecsnek is
van egy megengedett +- max. pozíció lengése.
Akkor van baj, ha ennek a mértéke eléri, vagy
meghaladja a fél periódusra vonatkozó értéket.
Akkor kiesik a szinkronból, ahogyan írtad is az
előbb. És az egy izgalmas kérdés, hogy ez a
sáv hogyan változik az egyes paraméterek
(step frekvencia, hajtásmód, terhelőnyomaték,
áram, stb...) függvényében, ennek egy
variációját mérte ki Pszichobilly.
Egyébként ilyen értelemben nyugodtan
mondhatjuk, hogy egy jó léptető motor nem is
rossz dolog kis fordulatokon, ugyanis
csak 2 "hibátárolója" van, azaz nagyon precíz
józság, még Péter "szigorú 128"-ához képest is
sokkal komolyabb.:))
Tehát lassan a testtel, amikor nagyon leírjuk a
léptecset bizonyos területeken és tartományokban, egy rosszabb szervo ilyenkor
lehet, hogy csak kullog utána pozíciókövetésben.:)
Éljenek a léptecsek is!:)
van egy megengedett +- max. pozíció lengése.
Akkor van baj, ha ennek a mértéke eléri, vagy
meghaladja a fél periódusra vonatkozó értéket.
Akkor kiesik a szinkronból, ahogyan írtad is az
előbb. És az egy izgalmas kérdés, hogy ez a
sáv hogyan változik az egyes paraméterek
(step frekvencia, hajtásmód, terhelőnyomaték,
áram, stb...) függvényében, ennek egy
variációját mérte ki Pszichobilly.
Egyébként ilyen értelemben nyugodtan
mondhatjuk, hogy egy jó léptető motor nem is
rossz dolog kis fordulatokon, ugyanis
csak 2 "hibátárolója" van, azaz nagyon precíz
józság, még Péter "szigorú 128"-ához képest is
sokkal komolyabb.:))
Tehát lassan a testtel, amikor nagyon leírjuk a
léptecset bizonyos területeken és tartományokban, egy rosszabb szervo ilyenkor
lehet, hogy csak kullog utána pozíciókövetésben.:)
Éljenek a léptecsek is!:)
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 december 16, 22:20
Írta: bmejdz9nu Dátum 2008 december 16, 22:20
Ugye-ugye milyen "gavallérosan" sok az a 128 bites tároló az A300-ban... egy step/dir környezetben amit "anno" léptetőmotorhoz fejlesztettek.
Filózok is a 32 bit-re csökkentésről...Dehát nálam a step jel sokszorozó miatt pl. négyszerező üzemmódban úgyis csak 32 bit a valóságban...
Lehetne olyan léptető vezérlőt csinálni, hogy a léptető motorra encodert + tároló(cska) és ha lépést veszt "szegényke" akkor "vissza adja neki" a vesztett step jeleket...azaz nem hagyja elveszteni a pozíciót...
Vagy ez a spanyolviasz feltalálása? :)
Filózok is a 32 bit-re csökkentésről...Dehát nálam a step jel sokszorozó miatt pl. négyszerező üzemmódban úgyis csak 32 bit a valóságban...
Lehetne olyan léptető vezérlőt csinálni, hogy a léptető motorra encodert + tároló(cska) és ha lépést veszt "szegényke" akkor "vissza adja neki" a vesztett step jeleket...azaz nem hagyja elveszteni a pozíciót...
Vagy ez a spanyolviasz feltalálása? :)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 december 16, 22:23
Írta: svejk Dátum 2008 december 16, 22:23
No igen, éljenek, és élnek is a mai napig :)
Én sem azért próbáltam áttérni a servora mert nem tartottam pontosnak, hanem a többi dolog miatt..
Az én akkori mechanikám legalább egy nagyságrenddel rosszabb volt mint a léptető felbontása vagy a késései, lengései :)
Ha már ilyen lusta vagyok, mi is lett a végeredménye a méréseknek számokban?
Ja, látom már a #1631-gyel javítva 500-as fordulaton 0,65 egészlépés..
Ez hihető is lehet ha nézzük hogy van a motornak és az orsónak is 2-2 csapágysúrlódása és pluszban a golyósanya súrlódása.
3-400 as fordulat felett már kezd erősen hanyatlani a motor nyomatéka, még az áramgenerátoros táplálás mellett is.
Vagy csak üresben ment a léptetőmoci??
Mert akkor viszont kicsit soknak tartom állandó fordulat mellett ezt a hibát.
Én sem azért próbáltam áttérni a servora mert nem tartottam pontosnak, hanem a többi dolog miatt..
Az én akkori mechanikám legalább egy nagyságrenddel rosszabb volt mint a léptető felbontása vagy a késései, lengései :)
Ha már ilyen lusta vagyok, mi is lett a végeredménye a méréseknek számokban?
Ja, látom már a #1631-gyel javítva 500-as fordulaton 0,65 egészlépés..
Ez hihető is lehet ha nézzük hogy van a motornak és az orsónak is 2-2 csapágysúrlódása és pluszban a golyósanya súrlódása.
3-400 as fordulat felett már kezd erősen hanyatlani a motor nyomatéka, még az áramgenerátoros táplálás mellett is.
Vagy csak üresben ment a léptetőmoci??
Mert akkor viszont kicsit soknak tartom állandó fordulat mellett ezt a hibát.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 december 16, 22:28
Írta: svejk Dátum 2008 december 16, 22:28
Nem hiszem hogy kivitelezhető lenne ez a plusz lépésadás.
Esetleg naygfelbontású tárcsával mérni lehetne a késést és a gerjesztőáramot növelni?? :)
Á, hülyeség a túl nagy áram is okoz gubancot a lépéseknél..
Szerintem csak indikáció miatt van egynémely léptetős szerkezeten encoder.
Esetleg naygfelbontású tárcsával mérni lehetne a késést és a gerjesztőáramot növelni?? :)
Á, hülyeség a túl nagy áram is okoz gubancot a lépéseknél..
Szerintem csak indikáció miatt van egynémely léptetős szerkezeten encoder.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 16, 22:29
Írta: 000000000 Dátum 2008 december 16, 22:29
"Vagy ez a spanyolviasz feltalálása? :)"
Az a baj, hogy nagyobb fordulatokon sajna nincs
nyomatéka már, tehát hiába van encodere, ha
nincs hajtás vagy korrekció képessége.:)
Az a baj, hogy nagyobb fordulatokon sajna nincs
nyomatéka már, tehát hiába van encodere, ha
nincs hajtás vagy korrekció képessége.:)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 16, 22:34
Írta: 000000000 Dátum 2008 december 16, 22:34
"Vagy csak üresben ment a léptetőmoci??
Mert akkor viszont kicsit soknak tartom állandó
fordulat mellett ezt a hibát."
Nem, sok az, mert sajnos nagyobb step
frekvenciáknál belép a villamos időállandó
szerepe, és ez eldönti a kérdést, egyszerűen
nem tud a mágneses mező felépülni még
üresjáratban sem.
Mert akkor viszont kicsit soknak tartom állandó
fordulat mellett ezt a hibát."
Nem, sok az, mert sajnos nagyobb step
frekvenciáknál belép a villamos időállandó
szerepe, és ez eldönti a kérdést, egyszerűen
nem tud a mágneses mező felépülni még
üresjáratban sem.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 december 16, 22:35
Írta: svejk Dátum 2008 december 16, 22:35
De igazából szerintem nincs is nagy jelentősége az értéknek, azt hiszem abban mindannyian egyetérthetünk hogy szigorúan a +- 2 egészlépésen belül kell maradni és még véletlen sem megközelíteni, főleg ha még a rezonanciákat is hozzávesszük.
Erre való ugye a megfelelő gyorsítási görbe a kész gép beállításakor.
Erre való ugye a megfelelő gyorsítási görbe a kész gép beállításakor.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 december 16, 22:40
Írta: svejk Dátum 2008 december 16, 22:40
Igaz lehet ezt eddig kihagytam... :(
Nem véletlen hogy hagyományos vassal nem lehet párszáz Hz-fölé menni trafónál vagy motornál sem.
Nem véletlen hogy hagyományos vassal nem lehet párszáz Hz-fölé menni trafónál vagy motornál sem.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 17, 10:05
Írta: 000000000 Dátum 2008 december 17, 10:05
Sziasztok! Léptető mocit keresnék.Nanotech tipusú
ezek az adatok vannak rá írva : 1.8 Deg , 42V , 1.4 A.És 4 kábel jön ki belőle.
ezek az adatok vannak rá írva : 1.8 Deg , 42V , 1.4 A.És 4 kábel jön ki belőle.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 17, 12:57
Írta: s7manbs8 Dátum 2008 december 17, 12:57
nem 4.2 V ? a 42 kicsit soknak tűnik.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 17, 13:33
Írta: 000000000 Dátum 2008 december 17, 13:33
De 4.2 v elírtam .
Cím: Re:Léptetőmotor
Írta: wrfwxv4t9 Dátum 2008 december 20, 19:19
Írta: wrfwxv4t9 Dátum 2008 december 20, 19:19
Kedves Topiklakók!
Baráti áron sikerűlt kettő döbö forgókondenzátorral összeépített léptetőmotort vásároljak. A felhasználása is ilyen jellegű lészen, mert egy antennahangoló műszer hangolóelemeit fogja forgatni. A motorból 2x4 (piros, fekete, sárga, szürke) vezeték lógnak ki. A villanymotorra "GAMMA" felirat van ráragasztva egy fólián. Ismeri Valaki közelebbről ezt a motortipust? Netán van-e tapasztalata Valakinek?
Baráti áron sikerűlt kettő döbö forgókondenzátorral összeépített léptetőmotort vásároljak. A felhasználása is ilyen jellegű lészen, mert egy antennahangoló műszer hangolóelemeit fogja forgatni. A motorból 2x4 (piros, fekete, sárga, szürke) vezeték lógnak ki. A villanymotorra "GAMMA" felirat van ráragasztva egy fólián. Ismeri Valaki közelebbről ezt a motortipust? Netán van-e tapasztalata Valakinek?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 22, 21:17
Írta: 000000000 Dátum 2008 december 22, 21:17
Hello! Nincs valakinek információja a következő motorról?
KP86LM2-503
KP86LM2-503
Cím: Re:Léptetőmotor
Írta: 279nwbpsa Dátum 2008 december 22, 21:33
Írta: 279nwbpsa Dátum 2008 december 22, 21:33
Szervusz!
Én is vettem a találkozón 2db-ot.
Adatokat nem találtam,de kipróbáltam mlndkettőt és elég erős motorok.
Én is vettem a találkozón 2db-ot.
Adatokat nem találtam,de kipróbáltam mlndkettőt és elég erős motorok.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 23, 00:48
Írta: s7manbs8 Dátum 2008 december 23, 00:48
Egy ötletem motorokkal kapcsolatban, hogyan lehetne nagyobb teljesítményre bírni a motorunkat.
Furatokat készítünk a motor alumínium csapágyházaiba mindkét végén, és kényszerhűtést alkalmazunk ventillátorral, átmenő levegőhűtéssel, így a gyári adatokhoz képest megnövelhetjük a motor forgatónyomatékát. Kisebb motor is elegendő ugyanahhoz a mechanikához, nem is kevéssel kisebb.
Ez csak ötlet, még nem próbáltam, csak külső hűtéssel, de így lehet jobb a hatékonsága a hűtésnek.
Hajrá hobbyzók !
Furatokat készítünk a motor alumínium csapágyházaiba mindkét végén, és kényszerhűtést alkalmazunk ventillátorral, átmenő levegőhűtéssel, így a gyári adatokhoz képest megnövelhetjük a motor forgatónyomatékát. Kisebb motor is elegendő ugyanahhoz a mechanikához, nem is kevéssel kisebb.
Ez csak ötlet, még nem próbáltam, csak külső hűtéssel, de így lehet jobb a hatékonsága a hűtésnek.
Hajrá hobbyzók !
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2008 december 23, 11:32
Írta: svejk Dátum 2008 december 23, 11:32
Ehhez qrva jó szűrés kellene mert igen kicsi a légrés és a piszok, főleg a ferromágneses a halála a léptetőnek.
A külső hűtés is elegendő, sokkal többet nem tudsz egyébként sem kihozni belőle, mert pl. mágnás miskákat akár tönkre is teheted nagyobb árammal.
A külső hűtés is elegendő, sokkal többet nem tudsz egyébként sem kihozni belőle, mert pl. mágnás miskákat akár tönkre is teheted nagyobb árammal.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 23, 12:11
Írta: 000000000 Dátum 2008 december 23, 12:11
Szerintem ez egy bipoláris léptető. Nekem is van még az átkosból maradékként, de soha nem használtam semmire, mert kicsik. Az összetartozó tekercspárokat ellenállásmérésel megtalálod, az elvi bekötést pedig ITT.
Cím: Re:Léptetőmotor
Írta: Szedlay Pál Dátum 2008 december 26, 23:02
Írta: Szedlay Pál Dátum 2008 december 26, 23:02
Szigma!
A következő kéréssel fordulok hozzád.
Ha időd engedi és tudsz érdemben válaszolni( nem magasröptű mérnöki integrálokkal, csak póriasan fölhözragadtan közérthetően szájbarágósan, nincs elektromérnöki diplomám, semmilyen sincsen) a következő problémámra akkor megköszönném.
Túl sok a pótméter az eszközömön és nem tudom mit hová állítsak és hogyan, hogy az optimális beállítást elérjem. Úgy olvastam az eddigi hozzászólásaidból, hogy otthon vagy a léptetőmotorok lelkivilágában.
A következő léptecs driverrel rendelkezem
Parker ZETA4
http://www.parkermotion.com/manuals/ZETA4240/ZETA4_240_RevA__UG.pdf
A következő potmétereket nem tudom hová és miért tekerjem ahhoz hogy a rendszerem a legjobb beállításba legyen.
Phase Balance
Phase A Ofsett
Phase B Ofsett
Electronic viscosity
Active Damping
Ha tudsz segíts.
Köszönöm.
A következő kéréssel fordulok hozzád.
Ha időd engedi és tudsz érdemben válaszolni( nem magasröptű mérnöki integrálokkal, csak póriasan fölhözragadtan közérthetően szájbarágósan, nincs elektromérnöki diplomám, semmilyen sincsen) a következő problémámra akkor megköszönném.
Túl sok a pótméter az eszközömön és nem tudom mit hová állítsak és hogyan, hogy az optimális beállítást elérjem. Úgy olvastam az eddigi hozzászólásaidból, hogy otthon vagy a léptetőmotorok lelkivilágában.
A következő léptecs driverrel rendelkezem
Parker ZETA4
http://www.parkermotion.com/manuals/ZETA4240/ZETA4_240_RevA__UG.pdf
A következő potmétereket nem tudom hová és miért tekerjem ahhoz hogy a rendszerem a legjobb beállításba legyen.
Phase Balance
Phase A Ofsett
Phase B Ofsett
Electronic viscosity
Active Damping
Ha tudsz segíts.
Köszönöm.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 26, 23:36
Írta: 3k74cecek Dátum 2008 december 26, 23:36
Ezt a motor vezérlőt nem ismerem, így először át kell tanulmányoznom a dokuját amit megadtál.
Ha ismered a motorod tipusát, akkor azt is add meg légyszives, mert amint látom első belekukkantásra, ez a vezérlő többet tud az általánosan használtnál, vagy csak bonyolultabban kell beállítani. Majd elválik ha végig olvasom.
Ha ismered a motorod tipusát, akkor azt is add meg légyszives, mert amint látom első belekukkantásra, ez a vezérlő többet tud az általánosan használtnál, vagy csak bonyolultabban kell beállítani. Majd elválik ha végig olvasom.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 27, 00:12
Írta: 3k74cecek Dátum 2008 december 27, 00:12
A DIP kapcsolók beállítását is add meg légyszives.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 27, 10:06
Írta: 000000000 Dátum 2008 december 27, 10:06
„nem magasröptű mérnöki integrálokkal”
Nem szabad ennyire lepóriasítani a tudományt!
Ha, tudós mérnökeink nem deriválnak és nem integrálnak, soha nem derül ki, hogy 6 000 mm-es hegyeinken csak alagúton kelhetünk át!
Ráadásul, soha nem építenek szerpentineket a Hortobágyon.
Nagydolog a mérnöki zsenialitás.
Zsenikből, meg jók vagyunk!
Nem szabad ennyire lepóriasítani a tudományt!
Ha, tudós mérnökeink nem deriválnak és nem integrálnak, soha nem derül ki, hogy 6 000 mm-es hegyeinken csak alagúton kelhetünk át!
Ráadásul, soha nem építenek szerpentineket a Hortobágyon.
Nagydolog a mérnöki zsenialitás.
Zsenikből, meg jók vagyunk!
Cím: Re:Léptetőmotor
Írta: HJózsi Dátum 2008 december 27, 10:52
Írta: HJózsi Dátum 2008 december 27, 10:52

Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 27, 13:16
Írta: s7manbs8 Dátum 2008 december 27, 13:16
Ennek a leírásnak a 8. oldalán a léptetőmotorok viselkedéséről tanulságos grafikonok vannak arról, hogyan függ a fordulatszám, forgatónyomaték, motorméret (teljesítmény) és a tekercsek bekötése (soros, párhuzamos) egymástól. Érdemes megnézni, ha valakinek nem világos, hogy mikor mit célszerű használni.
http://www.parkermotion.com/manuals/ZETA4240/ZETA4_240_RevA__UG.pdf
http://www.parkermotion.com/manuals/ZETA4240/ZETA4_240_RevA__UG.pdf
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 27, 13:31
Írta: s7manbs8 Dátum 2008 december 27, 13:31
Ez mi akarna lenni ?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 27, 14:00
Írta: 000000000 Dátum 2008 december 27, 14:00
Ha az, amire gondolok, hát HJózsi rendesen melléfogott.
Vannak több mint kétezer éves építmények is. Vizet vezettek vele, rajta az indiánok. Figyelitek? Amiket említek, kétezer évesek!
Érdekelne, hogy HJózsi csodája hol lesz kétezer év múlva?
Az is lehet, hogy én fogtam mellé, mert HJózsi a semmit átívelő akármire hozott példát, ami szintén nem idegen tőlünk.
Vannak több mint kétezer éves építmények is. Vizet vezettek vele, rajta az indiánok. Figyelitek? Amiket említek, kétezer évesek!
Érdekelne, hogy HJózsi csodája hol lesz kétezer év múlva?
Az is lehet, hogy én fogtam mellé, mert HJózsi a semmit átívelő akármire hozott példát, ami szintén nem idegen tőlünk.
Cím: Re:Léptetőmotor
Írta: HJózsi Dátum 2008 december 27, 14:11
Írta: HJózsi Dátum 2008 december 27, 14:11
Síkság bravúros átívelése, avagy a mérnöki zsenialitás ... illusztráció inas gondolataihoz #1724 ...
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 27, 14:19
Írta: s7manbs8 Dátum 2008 december 27, 14:19
Sajnos nem látom, mi az, mert nálam nem jelenik meg a kép, "file not found on server" lehet annyira titkos volt, hogy már le is törölte ?
Cím: Re:Léptetőmotor
Írta: HJózsi Dátum 2008 december 27, 14:24
Írta: HJózsi Dátum 2008 december 27, 14:24
Klikk a képre jobbegér, Kép tulajdonságai ...
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 27, 14:25
Írta: s7manbs8 Dátum 2008 december 27, 14:25
A 34-36 oldalon van leírva, illetve a motor adataihoz kell beállítani, ami az ezen oldalon levő táblázatokban látható. Ha tudod a motorod, illetve rendszered ilyesféle adatait, akkor kb. be tudod állítani, ha nem, akkor kisérletezni kell vele, és füllel szemmel kell beállítani, úgy hogy kis fordulaton ne rezonáljon a motor, de nagy fordulattal is lehessen közben hajtani.
Az EV 3 fordulat/másodperc alatt működik.
Az EV 3 fordulat/másodperc alatt működik.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 27, 14:26
Írta: s7manbs8 Dátum 2008 december 27, 14:26
http://upload.wikimedia.org/wikipedia/commons/c/c3/K%F5r%F6shegy_l%E9gifot%F3.jpg
Ez lenne a link, de ott nem talál semmit.
Ez lenne a link, de ott nem talál semmit.
Cím: Re:Léptetőmotor
Írta: HJózsi Dátum 2008 december 27, 14:26
Írta: HJózsi Dátum 2008 december 27, 14:26
Ja, utóbbi ...
Cím: Re:Léptetőmotor
Írta: HJózsi Dátum 2008 december 27, 14:27
Írta: HJózsi Dátum 2008 december 27, 14:27
Operában : http://upload.wikimedia.org/wikipedia/commons/c/c3/Kőröshegy_légifotó.jpg
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 27, 14:33
Írta: 000000000 Dátum 2008 december 27, 14:33
Én is erre gondoltam.
Elébe tettem egy inasféle provokatív bevezetőt.
Elébe tettem egy inasféle provokatív bevezetőt.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 27, 14:33
Írta: s7manbs8 Dátum 2008 december 27, 14:33
Ezt érti valaki ?
"A kreativitás kulcsa abban rejlik,
hogy tudod, hogy rejtsd el forrásaid."
Albert Einstein (1879-1955)
"A kreativitás kulcsa abban rejlik,
hogy tudod, hogy rejtsd el forrásaid."
Albert Einstein (1879-1955)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 27, 14:37
Írta: s7manbs8 Dátum 2008 december 27, 14:37
Nekem nincs operám, fel kéne tenni a cnctar.hunbay-ra és ékezetes betűk nélkül, hátha úgy jobban szeretné az én kis mozzilla firefox-om.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 27, 14:37
Írta: 000000000 Dátum 2008 december 27, 14:37
Nem állítom értem, de egy tippem van.
Gondolj a relativitás elméletére. A világ legnagyobb hasba akasztása.
Persze, „tudományosan”.
Gondolj a relativitás elméletére. A világ legnagyobb hasba akasztása.
Persze, „tudományosan”.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 27, 14:38
Írta: 000000000 Dátum 2008 december 27, 14:38
Miért nem teszel fel egy tisztességes explorert?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 27, 14:39
Írta: s7manbs8 Dátum 2008 december 27, 14:39
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 27, 14:40
Írta: s7manbs8 Dátum 2008 december 27, 14:40
Na azzal még megnézem, hátha az szereti, igazad van.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 27, 14:43
Írta: s7manbs8 Dátum 2008 december 27, 14:43
Hát kicsit meg is lepődtek, mikor előállt vele, hogy finoman fogalmazzak.
Cím: Re:Léptetőmotor
Írta: HJózsi Dátum 2008 december 27, 14:44
Írta: HJózsi Dátum 2008 december 27, 14:44
A 3.0.1-es Firefox is mutatja nálam gond nélkül ... [#nemtudom] ... persze ez inkább csevegő téma ... nem Léptető ... ;)
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2008 december 27, 14:53
Írta: Motoros Dátum 2008 december 27, 14:53
A képen is látható hogy a híd rádiusza és a völgy rádiusza közel azonos. Nyaranta arra járok (híd alatt) és csodálkozok hogy minek is ez ide?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 27, 14:55
Írta: 000000000 Dátum 2008 december 27, 14:55
Bocsi, tényleg nem léptető téma, de a modik biztosan helyre teszik a dolgokat.
Szóval.
„A bűvész kilopja fél szemed a másikat csak azért hagyja meg, hogy láthasd és ünnepeld.”
Nagyon sokszor az arcunkba köpik az igazságot. Azért, hogy irritáljanak. Meg tudják, hogy az agyatlan sznobok úgyis „leugatnak” minket.
Egy másik topikban írt Szobrász a művészekről és az „alkotásaikhoz” való viszonyára.
Szerintem, hozzáértőn foglalt állást. Persze, volt olyan „kisiskolás”, aki rögtön felmondta a leckét.
Szóval.
„A bűvész kilopja fél szemed a másikat csak azért hagyja meg, hogy láthasd és ünnepeld.”
Nagyon sokszor az arcunkba köpik az igazságot. Azért, hogy irritáljanak. Meg tudják, hogy az agyatlan sznobok úgyis „leugatnak” minket.
Egy másik topikban írt Szobrász a művészekről és az „alkotásaikhoz” való viszonyára.
Szerintem, hozzáértőn foglalt állást. Persze, volt olyan „kisiskolás”, aki rögtön felmondta a leckét.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 27, 14:56
Írta: 000000000 Dátum 2008 december 27, 14:56
Ha lenne egy hídépítő céged, tudnád.
Cím: Re:Léptetőmotor
Írta: 4um5b65d Dátum 2008 december 27, 15:20
Írta: 4um5b65d Dátum 2008 december 27, 15:20
Azt hiszem ha mindenki egyformán kreatív és találékony lenne akkor nem is létezne ez a fogalom. És most jön az értelmezése a mondatnak.
Nem szükséges okvetlenül kreatívnak, találékonynak lenned csak tudd azt, hogy melyik web oldalon (forrás) lelhető fel az adott problémára a megoldás és lehetőleg ezt ne ismerje senki más. Ettől már kreatív leszel. (akarom mondani, kreatívnak fogsz látszani)
Nem szükséges okvetlenül kreatívnak, találékonynak lenned csak tudd azt, hogy melyik web oldalon (forrás) lelhető fel az adott problémára a megoldás és lehetőleg ezt ne ismerje senki más. Ettől már kreatív leszel. (akarom mondani, kreatívnak fogsz látszani)
Cím: Re:Léptetőmotor
Írta: Szedlay Pál Dátum 2008 december 27, 21:23
Írta: Szedlay Pál Dátum 2008 december 27, 21:23
Szigma!
Motor: RS31C
SW1: on,on,on,on,on, on,on,of,of,of,of,of
SW2: on,of,of,of,of, of,on,of,of,of,of,on
Köszönöm a segítséget.
Motor: RS31C
SW1: on,on,on,on,on, on,on,of,of,of,of,of
SW2: on,of,of,of,of, of,on,of,of,of,of,on
Köszönöm a segítséget.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 27, 21:35
Írta: s7manbs8 Dátum 2008 december 27, 21:35
És ebben a beállításban működik most neked ? Én is átolvastam a vezérlőd leírását, jó kis cucc az biztos. A léptetőmotorok működéséből fakadó hiányosságokat kompenzálja, és a még hatékonyabb, stabilabb működést segíti a vezérlőd megfelelő beálítása.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 27, 21:43
Írta: 3k74cecek Dátum 2008 december 27, 21:43
Még egy kérdés: soros vagy párhuzamos módba van kötve a motor?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 27, 21:49
Írta: s7manbs8 Dátum 2008 december 27, 21:49
Aztán a végén, ha készen van, kérünk egy mérési tesztet, hogy tényleg olyan hatékonyan csökkenti a rezonanciákat, ahogy a leírás alapján kiolvasható !
Cím: Re:Léptetőmotor
Írta: Szedlay Pál Dátum 2008 december 28, 10:48
Írta: Szedlay Pál Dátum 2008 december 28, 10:48
Párhuzamos
Cím: Re:Léptetőmotor
Írta: Szedlay Pál Dátum 2008 december 28, 10:53
Írta: Szedlay Pál Dátum 2008 december 28, 10:53
Nincs encoder a motor tengelyek végén, és nincs tengelyvég sem. Akkor Te hogyan készítenéd a tesztet? Ha van ötledet írd meg.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 28, 13:17
Írta: s7manbs8 Dátum 2008 december 28, 13:17
Hát valami mérőeszköz mindenképpen kellene, anélkül csak szemrevételezéssel tudod tesztelni, hogy ténylegesen milyen hatása van a beállításoknak, illetve még hinni is lehet csak úgy. Vagy a gépre szerelve teszt munkadarabot készíteni és nagyítóval megnézni, a minőséget, pl. egy tollal rajzolt valami ábrán.
Cím: Re:Léptetőmotor
Írta: Szedlay Pál Dátum 2008 december 28, 15:28
Írta: Szedlay Pál Dátum 2008 december 28, 15:28
Itt egy alkatrész egy furatos hatszög.
A futar átmérő 1,8mm a hatlap távolság 2,4mm
Az éllekerekítés 0,05mm látható, hogy nem rossz a darab. Egy tollal készített darabon nem látszik semmi. Nagyon hegyes karctűvel készített rajzolaton talán látszik a beállítás különbsége. Ez a fotó kb. 40X nagyítás.

A futar átmérő 1,8mm a hatlap távolság 2,4mm
Az éllekerekítés 0,05mm látható, hogy nem rossz a darab. Egy tollal készített darabon nem látszik semmi. Nagyon hegyes karctűvel készített rajzolaton talán látszik a beállítás különbsége. Ez a fotó kb. 40X nagyítás.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 28, 16:08
Írta: s7manbs8 Dátum 2008 december 28, 16:08
Na ez nem semmi.
Cím: Re:Léptetőmotor
Írta: 7vpav5d32 Dátum 2008 december 28, 17:21
Írta: 7vpav5d32 Dátum 2008 december 28, 17:21
[#eljen][#nevetes1]
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 28, 18:17
Írta: 3k74cecek Dátum 2008 december 28, 18:17
A következőképpen kell beállítani a vezérlődet:
A DIP kapcsolók jól állnak, majd 2-t kell a beállítás végén esetleg megváltoztatnod.
Motorvezérlő beállítása: 22. oldaltól.
A motor terheletlen legyen! Tehát le kell szerelni a gépről!
3.Forgasd a motort kb. 166 1/min fordulattal, és keresd meg a rezonancia pontot.
Ez azt jelenti, hogy a fordulatszámot finoman változtatva az adott fordulatszám körül,
keresd meg azt a pontot ,ahol a motor hirtelen zajossá és remegőssé változik.
A zajt hallod, a remegést a kezeddel érzed (ujjad hegyével finoman hozzáérsz a motorhoz).
4.Ezután a Phase A offset, és a phase B offset potméterrel állítsál be
minimális rezgést és a legsimább működést.
A két potmétert felváltva állítgasd, és többször egymás után, amig el nem éred a legjobb állapotot.
5.Forgasd a motort kb. 83 1/min fordulattal, és újra keresd meg a rezonancia pontot.
6.Ezután a Phase balance potméterrel állítsál be minimális rezgést és legsimább működést.
7. Ismételd meg a 3.-6. pontokat.
Ezt legalább egyszer ismételd meg, de ha látod, hogy eléggé máshová kellett állítani a potmétereket, akkor 2-3-szor is meg kellhet ismételni.
8.Forgasd a motort kb. 42 1/min fordulattal, és keresd meg a rezonancia pontot.
9. Az sw1-10 és sw1-11 kapcslókkal (4 variáció lehetséges) keresd meg azt a beállítást ahol
minimális rezgést és a legsimább működést kapod.
A kapcsolók állítása után mindíg kapcsold ki a vezérlőt, vagy adjál Reset jelet a 25 pólusú D csatlakozóján át, mert a SW kapcsolók állását csak egyszer az indulásnál olvassa be a vezérlő.
Ezzel kész a beállítás, felszerelheted a motort a gépre.
Remélem ezek alapján sikerül nagyon jól beállítani a masinádat.
A DIP kapcsolók jól állnak, majd 2-t kell a beállítás végén esetleg megváltoztatnod.
Motorvezérlő beállítása: 22. oldaltól.
A motor terheletlen legyen! Tehát le kell szerelni a gépről!
3.Forgasd a motort kb. 166 1/min fordulattal, és keresd meg a rezonancia pontot.
Ez azt jelenti, hogy a fordulatszámot finoman változtatva az adott fordulatszám körül,
keresd meg azt a pontot ,ahol a motor hirtelen zajossá és remegőssé változik.
A zajt hallod, a remegést a kezeddel érzed (ujjad hegyével finoman hozzáérsz a motorhoz).
4.Ezután a Phase A offset, és a phase B offset potméterrel állítsál be
minimális rezgést és a legsimább működést.
A két potmétert felváltva állítgasd, és többször egymás után, amig el nem éred a legjobb állapotot.
5.Forgasd a motort kb. 83 1/min fordulattal, és újra keresd meg a rezonancia pontot.
6.Ezután a Phase balance potméterrel állítsál be minimális rezgést és legsimább működést.
7. Ismételd meg a 3.-6. pontokat.
Ezt legalább egyszer ismételd meg, de ha látod, hogy eléggé máshová kellett állítani a potmétereket, akkor 2-3-szor is meg kellhet ismételni.
8.Forgasd a motort kb. 42 1/min fordulattal, és keresd meg a rezonancia pontot.
9. Az sw1-10 és sw1-11 kapcslókkal (4 variáció lehetséges) keresd meg azt a beállítást ahol
minimális rezgést és a legsimább működést kapod.
A kapcsolók állítása után mindíg kapcsold ki a vezérlőt, vagy adjál Reset jelet a 25 pólusú D csatlakozóján át, mert a SW kapcsolók állását csak egyszer az indulásnál olvassa be a vezérlő.
Ezzel kész a beállítás, felszerelheted a motort a gépre.
Remélem ezek alapján sikerül nagyon jól beállítani a masinádat.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 28, 18:20
Írta: 3k74cecek Dátum 2008 december 28, 18:20
Bocs, most látom, hogy még két dolog beállítása hátra van, majd írom azt is.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 28, 18:22
Írta: 000000000 Dátum 2008 december 28, 18:22
Sziasztok!
A léptető motorokkal sok baj van (persze minden
más motorral is).:)
Készítettem egy komolyabb mérést, ami pont
Szedlay Pál problémájának is a lényege.
Egy léptető motor kapott egy encodert, és
3.6 fok elfordulást egységugrásjelként végrehajtott
egy saját tesztelő progiból.
Így tudta teljesíteni:

A teszt mérőrendszerem most egy 2000-es encoderrel
dolgozott 4X-ben. A motor egy 23LM C004 (6 V, 1.2A)
bipolár negyedlépés üzemmódban, terheletlen tengellyel.
A mérőrendszer 100 KHz-el vett mintát (akár 1 MHz-et is
tud), és tárolta, megjelenítette az adatokat.
2000 db mérés történt.
Sok tanulsága van ennek a mérésnek, ami vissazigazolja
a hajtáselméleteket is.
Pl. látható az osztásokból az is, hogy 5 ms körüli időállandóval
tudta ezt a feladatot megoldani a vizsgált rendszer,
és utána igen hosszú ideig több mint 20 ms-ig lecsengő
rezonanciába kerül a motor.
Ha pl. 1 motorfordulatra 4 mm a CNC gép elmnozdulása,
akkor sajna a 0.01 pontosság nem elérhető, mert a rezonanciák,
túllendülések és lemaradások kezdetben ettől nagyobbak
is lehetnek. Ráadásukl ezek a hibák a felületi érdességben
is mind meg fognak jelenni. Nyilván addig kell "tekergetni
a potikat" egy hajtáson, amíg ezen pályatorzulások a
legkedvezőbb mérési függvény görbét mutatják.
Ha valaki kiváncsi az adott hajtásának minőségére,
ezzel a rendszerrel kiválóan lehet a mocikat,
és hajtásokat tesztelgetni.
Idővel majd teszek fel AC és DC szervoteszteket is,
azokból is sokat lehet tanulni, és ott lényegesen
kedvezőbbek lehetnek az eredmények.
Persze vannak itt a Fórumon olyanok, akik utálják az
elméletet, az egységugrást, de íme egy gyakorlati példa,
amin keresztül egy ilyen méréssel sok hasznos, minőségi,
lényegi hajtástechnikai paraméter jól kimutatható,
beállítható, és kiválaszható a legjobb megoldás
az adott feladathoz.
A léptető motorokkal sok baj van (persze minden
más motorral is).:)
Készítettem egy komolyabb mérést, ami pont
Szedlay Pál problémájának is a lényege.
Egy léptető motor kapott egy encodert, és
3.6 fok elfordulást egységugrásjelként végrehajtott
egy saját tesztelő progiból.
Így tudta teljesíteni:
A teszt mérőrendszerem most egy 2000-es encoderrel
dolgozott 4X-ben. A motor egy 23LM C004 (6 V, 1.2A)
bipolár negyedlépés üzemmódban, terheletlen tengellyel.
A mérőrendszer 100 KHz-el vett mintát (akár 1 MHz-et is
tud), és tárolta, megjelenítette az adatokat.
2000 db mérés történt.
Sok tanulsága van ennek a mérésnek, ami vissazigazolja
a hajtáselméleteket is.
Pl. látható az osztásokból az is, hogy 5 ms körüli időállandóval
tudta ezt a feladatot megoldani a vizsgált rendszer,
és utána igen hosszú ideig több mint 20 ms-ig lecsengő
rezonanciába kerül a motor.
Ha pl. 1 motorfordulatra 4 mm a CNC gép elmnozdulása,
akkor sajna a 0.01 pontosság nem elérhető, mert a rezonanciák,
túllendülések és lemaradások kezdetben ettől nagyobbak
is lehetnek. Ráadásukl ezek a hibák a felületi érdességben
is mind meg fognak jelenni. Nyilván addig kell "tekergetni
a potikat" egy hajtáson, amíg ezen pályatorzulások a
legkedvezőbb mérési függvény görbét mutatják.
Ha valaki kiváncsi az adott hajtásának minőségére,
ezzel a rendszerrel kiválóan lehet a mocikat,
és hajtásokat tesztelgetni.
Idővel majd teszek fel AC és DC szervoteszteket is,
azokból is sokat lehet tanulni, és ott lényegesen
kedvezőbbek lehetnek az eredmények.
Persze vannak itt a Fórumon olyanok, akik utálják az
elméletet, az egységugrást, de íme egy gyakorlati példa,
amin keresztül egy ilyen méréssel sok hasznos, minőségi,
lényegi hajtástechnikai paraméter jól kimutatható,
beállítható, és kiválaszható a legjobb megoldás
az adott feladathoz.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 28, 18:27
Írta: 3k74cecek Dátum 2008 december 28, 18:27
Ezekből a görbékből azért nem tanácsos messzemenő következtetéseket levonni, mert ez az adott tipusú motorokra, igaz, egy más tipusnál ezek a görbék egészen másképp is kinézhetnek. A léptetőmotorok jelleggörbéjének alakja sokkal nagyobb szórást mutat mint pl. a váltóáramú aszinkron motoroké.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 december 28, 18:30
Írta: bmejdz9nu Dátum 2008 december 28, 18:30
Látod semmi sem tökéletes... De már beléptünk a 4X-es korszakba... lassan a Marsra is eljutunk :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 28, 18:37
Írta: 000000000 Dátum 2008 december 28, 18:37
Jajjj Te, elég baj, hogy csak a 4X-et látod megint...:)
Inkább képzeld el a szörnyű görbét, amit a behemót DC szervomocid produlkálna az A300-addal direkt hajtásban.
Egyből másképpen látnád a rendszered százados
pontosságát.:)
Inkább képzeld el a szörnyű görbét, amit a behemót DC szervomocid produlkálna az A300-addal direkt hajtásban.
Egyből másképpen látnád a rendszered százados
pontosságát.:)
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 28, 19:21
Írta: 3k74cecek Dátum 2008 december 28, 19:21
No ez már sokkal jobb mérés mint amit psychobilly csinált.
Köszönöm, hogy fáradoztál vele.
Ráadásul pontosan igazolja azt a kifogásomat amit psychobilly mérésénél felvetettem,
miszerint az indulás pillanatában kell a legnagyobbnak lenni a lemaradásnak.
Így mál el is döntötted ezt a vitát.
Csak a pontosság kedvéért:
1."Pl. látható az osztásokból az is, hogy 5 ms körüli időállandóval.. "
Ez nem látható, ezt te mondod. Ugyanis nincs léptékezve az idő tengely.
Ha annyit elárulnál, hogy a képen látható időtengely milyen hosszú idő, az sokat segítene.
2."mert a rezonanciák, túllendülések és lemaradások kezdetben ettől nagyobbak is lehetnek"
Ez szerintem tévedés, és az egyes dolgok keverése.
A képen nem a rezonancia állapota látható, hanem egy adott pozicióba állás rezgésének lecsengése.
A rezonancia és a rezgés egy picit más dolog, noha közük van egymáshoz.
A túllendülés szerintem sosem lesz nagyobb, mert te terheletlen motort mértél. A terhelt motor
ennél mindíg (kivéve esetleg a tényleges rezonancia állapotát) klisebb mértékben fog túllenűlni, és hamarabb lecseng.
Noha ezt már a vezérlő elektronika is befolyásolhatja, ha olyan megoldású, hogy a vezérlésnél valahogy figyelembe
veszi a terhelést is. Azért nem hinném, hogy ennyir elbonyolítanák a vezérlőt, de sosem lehet tudni ki mit ad elő.
A beállás utáni lemaradás, az egyértelműen terhelés függő lesz
Az nem világos, kogy minek a "kezdetére" gondolsz a fenti idézetben.
Azt sem egészen értem, hogy mitől egységugrás a mérésed.
Ugyanis az adott motor 1.8 fok/lépéses. Negyed lépéses vezérlővel hajtva.
Te 3.6 fokos lépést így 8 léptető impulzussal tudsz elérni. Akkor most mi az egységugrás ?
A képeden (második jelként) hol lennének a léptető impulzusok?
Az sem egyértelmű, hogy ez a kép a 3.6 fokos elfordulás lefolyását mutatja vagy csak egy mikrolépését.
Ez a homály eloszlana ha a képen ott lenne a léptető impulzus is.
Köszönöm, hogy fáradoztál vele.
Ráadásul pontosan igazolja azt a kifogásomat amit psychobilly mérésénél felvetettem,
miszerint az indulás pillanatában kell a legnagyobbnak lenni a lemaradásnak.
Így mál el is döntötted ezt a vitát.
Csak a pontosság kedvéért:
1."Pl. látható az osztásokból az is, hogy 5 ms körüli időállandóval.. "
Ez nem látható, ezt te mondod. Ugyanis nincs léptékezve az idő tengely.
Ha annyit elárulnál, hogy a képen látható időtengely milyen hosszú idő, az sokat segítene.
2."mert a rezonanciák, túllendülések és lemaradások kezdetben ettől nagyobbak is lehetnek"
Ez szerintem tévedés, és az egyes dolgok keverése.
A képen nem a rezonancia állapota látható, hanem egy adott pozicióba állás rezgésének lecsengése.
A rezonancia és a rezgés egy picit más dolog, noha közük van egymáshoz.
A túllendülés szerintem sosem lesz nagyobb, mert te terheletlen motort mértél. A terhelt motor
ennél mindíg (kivéve esetleg a tényleges rezonancia állapotát) klisebb mértékben fog túllenűlni, és hamarabb lecseng.
Noha ezt már a vezérlő elektronika is befolyásolhatja, ha olyan megoldású, hogy a vezérlésnél valahogy figyelembe
veszi a terhelést is. Azért nem hinném, hogy ennyir elbonyolítanák a vezérlőt, de sosem lehet tudni ki mit ad elő.
A beállás utáni lemaradás, az egyértelműen terhelés függő lesz
Az nem világos, kogy minek a "kezdetére" gondolsz a fenti idézetben.
Azt sem egészen értem, hogy mitől egységugrás a mérésed.
Ugyanis az adott motor 1.8 fok/lépéses. Negyed lépéses vezérlővel hajtva.
Te 3.6 fokos lépést így 8 léptető impulzussal tudsz elérni. Akkor most mi az egységugrás ?
A képeden (második jelként) hol lennének a léptető impulzusok?
Az sem egyértelmű, hogy ez a kép a 3.6 fokos elfordulás lefolyását mutatja vagy csak egy mikrolépését.
Ez a homály eloszlana ha a képen ott lenne a léptető impulzus is.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 28, 19:24
Írta: 3k74cecek Dátum 2008 december 28, 19:24
Még annyit pontosításként, hogy az adott tipusú motorokra az adott vezérlővel !!
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2008 december 28, 19:24
Írta: ANTAL GÁBOR Dátum 2008 december 28, 19:24
Tibor! légyszíves tegyél értékeket az ordinátára ill abszcisszára mert igy ez egy közgazdász diagramm !!
Cím: Re:Léptetőmotor
Írta: ra8nsmk6w Dátum 2008 december 28, 19:25
Írta: ra8nsmk6w Dátum 2008 december 28, 19:25
Arra lennék kiváncsi, hogy ezek a következtetések(itt a mérési adatokat értem)mennyire az adott motor sajátja, vagy inkább a motor és a vezérlő eggyütes lenyomata.Néhány vezérlő alaposan hozzá tud tenni a negativ motorviselkedéshez.Most nem kell némely vezérlöt az égbe emelni vagy elmeszelni,inkább csak a meghajtás módját értékelni a méréseid függvényében.Bizonyára sokan okulnánk belőle
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2008 december 28, 19:26
Írta: ANTAL GÁBOR Dátum 2008 december 28, 19:26
Szigma !Megelőztél 3 perccel
Cím: Re:Léptetőmotor
Írta: fs9s63xkf Dátum 2008 december 28, 19:35
Írta: fs9s63xkf Dátum 2008 december 28, 19:35
Az egységugrás, az amikor nem nulla kezdősebességgel indítod a motort, ilyen tesztet én is csináltam : Kép. És lám ott van ugyan az a lecsengés, amit Tibor45 is mért. Viszont ha nem egységugrással indítjuk, hanem nulláról akkor nem ilyen vészes a görbe...
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 28, 19:38
Írta: 3k74cecek Dátum 2008 december 28, 19:38
Ugyan a leírás kifejezetten nem írja, de a #1759-beli beállításnál a
Electronic viscosity és a
Active Damping
kapcsolókat állítsd 0-ra !
Electronic viscosity és a
Active Damping
kapcsolókat állítsd 0-ra !
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 28, 19:40
Írta: 000000000 Dátum 2008 december 28, 19:40
Bocs, de figyelmetlenek vagytok. Ezt írtam:
"A mérőrendszer 100 KHz-el vett mintát (akár 1
MHz-et is tud), és tárolta, megjelenítette az
adatokat. 2000 db mérés történt."
Ebből szerintem egyértelmű, hogy az első függőleges vonal a t=0 időpont. A második a
félidő, azaz 10 ms, az utolsó pedig 20 ms.
Természtesen a 2000 db 10 mikroszekundumonként
vett minta számszerűleg is megvan, de teljesen fölöslegesenek tartom egy 300*600 pixeles mezőn
a függőleges idővonalakat növelni.
"A mérőrendszer 100 KHz-el vett mintát (akár 1
MHz-et is tud), és tárolta, megjelenítette az
adatokat. 2000 db mérés történt."
Ebből szerintem egyértelmű, hogy az első függőleges vonal a t=0 időpont. A második a
félidő, azaz 10 ms, az utolsó pedig 20 ms.
Természtesen a 2000 db 10 mikroszekundumonként
vett minta számszerűleg is megvan, de teljesen fölöslegesenek tartom egy 300*600 pixeles mezőn
a függőleges idővonalakat növelni.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2008 december 28, 19:45
Írta: ANTAL GÁBOR Dátum 2008 december 28, 19:45
Ok, de egy diagramm önnmagában is kell hogy informáljon nem pedig különféle lábjegyzetetekkel kiegészítve
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 28, 19:45
Írta: 3k74cecek Dátum 2008 december 28, 19:45
"Az egységugrás, az amikor nem nulla kezdősebességgel indítod a motort"
Hát ezzel nagyon nem értek egyet.
Egységugrást bármilyen kiinduló állapottal lehet csinálni. De ha mégsem, akkor inkább nulla állapotból mint bármi másból.
Hát ezzel nagyon nem értek egyet.
Egységugrást bármilyen kiinduló állapottal lehet csinálni. De ha mégsem, akkor inkább nulla állapotból mint bármi másból.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 28, 19:48
Írta: 3k74cecek Dátum 2008 december 28, 19:48
"Ebből szerintem egyértelmű, hogy az első függőleges vonal a t=0 időpont.
Ez valóban egyértelmű, viszont az össze stöbbi az már nem.
Vagy úgy gondoltad, hogy számoljuk meg a mérési pontokat ???? [#nevetes1]
Ez valóban egyértelmű, viszont az össze stöbbi az már nem.
Vagy úgy gondoltad, hogy számoljuk meg a mérési pontokat ???? [#nevetes1]
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 28, 19:50
Írta: 3k74cecek Dátum 2008 december 28, 19:50
Nem kell növelni az idővonalak számát, csak meg kell mondani, hogy a teljes kép az 20ms és kész.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 28, 19:53
Írta: 000000000 Dátum 2008 december 28, 19:53
A mérésem más volt, mint amit Psychobilly csinált. De az Ő mérése, amikor egységugrást
is volt nála, teljesen egybevág az enyémmel (#1770). Csak én kinagyítottam, és csak ezt a
durva start jelenséget vizsgáltam.
Mellesleg így pont fordítva van, mint ahogyan
írod, a két független mérés erősíti egymást.
A többi kérdésedre válaszolgathatnék, de sajna
akkor már az eddigi 3:0 vesztett arányod
majdnem 10:0 lesz, és nem is tudom, hogy
tetszene ez neked. Ugyanis az a baj a legtöbb
kérdéseddel, hogy téves állítás (tudás) alapján teszed
fel, azaz mint már nem először ebben a témában
okoskodó jellege van.:)
is volt nála, teljesen egybevág az enyémmel (#1770). Csak én kinagyítottam, és csak ezt a
durva start jelenséget vizsgáltam.
Mellesleg így pont fordítva van, mint ahogyan
írod, a két független mérés erősíti egymást.
A többi kérdésedre válaszolgathatnék, de sajna
akkor már az eddigi 3:0 vesztett arányod
majdnem 10:0 lesz, és nem is tudom, hogy
tetszene ez neked. Ugyanis az a baj a legtöbb
kérdéseddel, hogy téves állítás (tudás) alapján teszed
fel, azaz mint már nem először ebben a témában
okoskodó jellege van.:)
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 28, 19:55
Írta: 3k74cecek Dátum 2008 december 28, 19:55
Azt hiszem először végezd el a már leírt beállítást és ha jól működik, nem morog egyes sebességeken akkor a még le nem írt lét kapcsolót hagyd 0 állásban. Azok beállítása elég macerás (leírni is :)) és gyanítom hogy a te alkalmazásodban nem lesz rá szükség.
Ha mégis kell, akkor majd belemélyedek.
Ha mégis kell, akkor majd belemélyedek.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 28, 19:56
Írta: 000000000 Dátum 2008 december 28, 19:56
Bolond és kötekedő vagy te komám, ez már
biztos.:) Inkább azt írtad volna, ja bocs,
tényleg...
biztos.:) Inkább azt írtad volna, ja bocs,
tényleg...
Cím: Re:Léptetőmotor
Írta: fs9s63xkf Dátum 2008 december 28, 19:58
Írta: fs9s63xkf Dátum 2008 december 28, 19:58
Bocsi, az kimaradt, hogy "például". Lehet 200-as fordulatról 0 idő alatt megállni is stb... De kétlem, hogy Te ezt nem értetted meg elsőre !?
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 28, 19:59
Írta: 3k74cecek Dátum 2008 december 28, 19:59
Én ugyan nem a te stílusodban írtam az előbb, de látom, hogy te képtelen vagy a fellengzős nagyképű stílusodtól megválni.
Így ne is fáraszd magad avval, hogy válaszolsz nekem. Inkább menj és merülj el az integrál képleteidben.
Hátha sikerül előbb-utóbb megtanulnod.
Így ne is fáraszd magad avval, hogy válaszolsz nekem. Inkább menj és merülj el az integrál képleteidben.
Hátha sikerül előbb-utóbb megtanulnod.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 28, 20:02
Írta: 3k74cecek Dátum 2008 december 28, 20:02
[#nevetes1][#nevetes2][#nevetes1][#nevetes2][#nevetes1][#nevetes2] Bagoly mondja verébnek ...[#wow1]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 28, 20:06
Írta: 000000000 Dátum 2008 december 28, 20:06
Ok, ezen tényleg nem érdemes vitázni.
Sajnos ez egy nagyon sok változós teszt,
és a digaramba hiába van ott az idő skála,
ha még másik 10 fő adat is hozzátartozik.
Ezért írtam "lábjegyzetet" hozzá.
De azért felhívnám a figyelmedet arra, hogy
jellegében mindig ilyesmi görbét kapunk,
legfeljebb egy Portescap Disk step motornál
10-szer szebbek az adatok.
Sajnos ez egy nagyon sok változós teszt,
és a digaramba hiába van ott az idő skála,
ha még másik 10 fő adat is hozzátartozik.
Ezért írtam "lábjegyzetet" hozzá.
De azért felhívnám a figyelmedet arra, hogy
jellegében mindig ilyesmi görbét kapunk,
legfeljebb egy Portescap Disk step motornál
10-szer szebbek az adatok.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 28, 20:07
Írta: 3k74cecek Dátum 2008 december 28, 20:07
"Lehet 200-as fordulatról 0 idő alatt megállni is"
Ilyet nehogy mondjál a vizsgán, mert páros lábbal rúgnak majd ki.
Ilyet nehogy mondjál a vizsgán, mert páros lábbal rúgnak majd ki.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 28, 20:11
Írta: 000000000 Dátum 2008 december 28, 20:11
""1."Pl. látható az osztásokból az is, hogy 5 ms körüli időállandóval.. "
Ez nem látható, ezt te mondod. Ugyanis nincs léptékezve az idő tengely.
Ha annyit elárulnál, hogy a képen látható időtengely milyen hosszú idő, az sokat segítene.""
Mivel továbbra is nagy a szád, értetlen vagy,
azért menjünk sorba, a fentiekre tehát
már válaszoltam, tehát ezzel 4:0.:)
Ez nem látható, ezt te mondod. Ugyanis nincs léptékezve az idő tengely.
Ha annyit elárulnál, hogy a képen látható időtengely milyen hosszú idő, az sokat segítene.""
Mivel továbbra is nagy a szád, értetlen vagy,
azért menjünk sorba, a fentiekre tehát
már válaszoltam, tehát ezzel 4:0.:)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 28, 20:24
Írta: s7manbs8 Dátum 2008 december 28, 20:24
Lehetne küldeni neki egy olyan G kód file-t is, ami pl. 1.1-es szorzóval növelné a léptetési frekit, és pl. 1s-ig tartaná egy adott frekin, közben fogná a motort, és felírná hanyadik sornál tart mikor rezonancia van. Utánna nézhetné azokon a frekiken, amit felírt. Nem tudom hogyan számoltad ki, hogy nála mennyi lesz a rezonancia frekvencia, mintha úgy emlékeznék, hogy neki nem a gyári ajánlott motorjai vannak.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 28, 20:28
Írta: 000000000 Dátum 2008 december 28, 20:28
"2....A túllendülés szerintem sosem lesz nagyobb, mert te terheletlen motort mértél. A terhelt motor
ennél mindíg (kivéve esetleg a tényleges rezonancia állapotát) klisebb mértékben fog túllenűlni, és hamarabb lecseng. "
Nocsak, nocsak.... És mi a helyzet a terhelés
redukált J-jével, mint plusz és jelentős
mértékű energiatároló renszerrel a motor
forgórészéhez képest, ami visszahat?
"3.
Te 3.6 fokos lépést így 8 léptető impulzussal tudsz elérni. Akkor most mi az egységugrás ?
A képeden (második jelként) hol lennének a léptető impulzusok?
Az sem egyértelmű, hogy ez a kép a 3.6 fokos elfordulás lefolyását mutatja vagy csak egy mikrolépését.
Ez a homály eloszlana ha a képen ott lenne a léptető impulzus is"
A homály a te agyadban van, ugyanis ezt is világosan leírtam, 3.6 fokos egységugrás parancsot kap a vezérlő a mérés kezdetén.
És ez ha negyedlépésbem vagyunk akkor ez
3.6/1.8*4=8 darab step jel átsöprését jelenti
minden földi halandó számára a vezérlőbe 2
mikrosec. alatt a jelen esetben.
ennél mindíg (kivéve esetleg a tényleges rezonancia állapotát) klisebb mértékben fog túllenűlni, és hamarabb lecseng. "
Nocsak, nocsak.... És mi a helyzet a terhelés
redukált J-jével, mint plusz és jelentős
mértékű energiatároló renszerrel a motor
forgórészéhez képest, ami visszahat?
"3.
Te 3.6 fokos lépést így 8 léptető impulzussal tudsz elérni. Akkor most mi az egységugrás ?
A képeden (második jelként) hol lennének a léptető impulzusok?
Az sem egyértelmű, hogy ez a kép a 3.6 fokos elfordulás lefolyását mutatja vagy csak egy mikrolépését.
Ez a homály eloszlana ha a képen ott lenne a léptető impulzus is"
A homály a te agyadban van, ugyanis ezt is világosan leírtam, 3.6 fokos egységugrás parancsot kap a vezérlő a mérés kezdetén.
És ez ha negyedlépésbem vagyunk akkor ez
3.6/1.8*4=8 darab step jel átsöprését jelenti
minden földi halandó számára a vezérlőbe 2
mikrosec. alatt a jelen esetben.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 28, 20:37
Írta: 000000000 Dátum 2008 december 28, 20:37
Az integrál képleteket hagyjad békén, ha
fel sem fogod a tartalmukat.
Pont ezért írkálsz egetverő sületlenségeket,
és kötözködsz velem is, csak tudnám, milyen
alapon, amikor idáig még mindenben tévedtél,
amit kritizáltál ezekben a témákban.:)
De ma megint kaptál 3 gólt, lassan haladunk a
10 felé.:)
fel sem fogod a tartalmukat.
Pont ezért írkálsz egetverő sületlenségeket,
és kötözködsz velem is, csak tudnám, milyen
alapon, amikor idáig még mindenben tévedtél,
amit kritizáltál ezekben a témákban.:)
De ma megint kaptál 3 gólt, lassan haladunk a
10 felé.:)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 28, 20:40
Írta: s7manbs8 Dátum 2008 december 28, 20:40
Az S-görbe profilú mozgatás jót tesz ezeknek a léptetőmotoroknak is, ha úgy vezéreljük azokat nem ? Nem lengedeznek azok akkor olyan sokat. Persze nem árt jó nagy felbontású mikrolépést sem alkalmazni.
Cím: Re:Léptetőmotor
Írta: Szedlay Pál Dátum 2008 december 28, 20:46
Írta: Szedlay Pál Dátum 2008 december 28, 20:46
Köszönöm segítségedet.
Cím: Re:Léptetőmotor
Írta: Szedlay Pál Dátum 2008 december 28, 20:49
Írta: Szedlay Pál Dátum 2008 december 28, 20:49
Nekem gyári motorjaim vannak
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 28, 20:49
Írta: 000000000 Dátum 2008 december 28, 20:49
Biztosan jótékony hatású.
De a tárolt villamos és mechanikai energiákkal
valamit kezdeni kell.
És sajnos és ha kevés az idő felgyorsulni, vagy
lelassulni, akkor van baj.:)
De a tárolt villamos és mechanikai energiákkal
valamit kezdeni kell.
És sajnos és ha kevés az idő felgyorsulni, vagy
lelassulni, akkor van baj.:)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 28, 20:51
Írta: s7manbs8 Dátum 2008 december 28, 20:51
Akkor már be is állítottad, az a lényeg.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 28, 20:55
Írta: s7manbs8 Dátum 2008 december 28, 20:55
Létezik olyan mágnes ami a vasat nem vonzza, hanem taszítja ?
Jó is lenne, ha fénysebességre tudna gyorsulni egy motor forgórésze, mint egy elektron, a másodperc icipici töredéke alatt.
Jó is lenne, ha fénysebességre tudna gyorsulni egy motor forgórésze, mint egy elektron, a másodperc icipici töredéke alatt.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 28, 20:55
Írta: 3k74cecek Dátum 2008 december 28, 20:55
Azt rábíztam, hogy hogyan állítja be a kívánt fordulatszámot.
A #1749-ben írt RS31C pontosan az egyik ajánlott motor.
A vezérlő doku 23. oldalán lévő adatot szoroztam 60-al,mert ott 1/sec-ben volt megadva.
A #1749-ben írt RS31C pontosan az egyik ajánlott motor.
A vezérlő doku 23. oldalán lévő adatot szoroztam 60-al,mert ott 1/sec-ben volt megadva.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 28, 20:57
Írta: s7manbs8 Dátum 2008 december 28, 20:57
Azért kell úgy beállítani a gyorsulás -lassulásokat, hogy a motor képességeitől többet ne akarjunk kihozni.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 28, 20:58
Írta: s7manbs8 Dátum 2008 december 28, 20:58
Rosszul emlékeztem, így már érthető, honnan jött ki az adat.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 28, 21:21
Írta: 3k74cecek Dátum 2008 december 28, 21:21
Nem értem, hogy ehhez miért kell, hogy taszítsa, és ne vonzza?
Vagy a két mondat nem összefüggő?
Vagy a két mondat nem összefüggő?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 28, 21:26
Írta: s7manbs8 Dátum 2008 december 28, 21:26
Két külön mondat, Tibor 45-től kérdeztem volna csak kimaradt a névre utalás. Hátha tud ilyet is, gondoltam.
Cím: Re:Léptetőmotor
Írta: HJózsi Dátum 2008 december 28, 23:37
Írta: HJózsi Dátum 2008 december 28, 23:37

Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 29, 05:44
Írta: 000000000 Dátum 2008 december 29, 05:44
A magamfajta aluliskolázottak kedvéért le kell ne azt is írni, hogy az egységugrásnak, vagy az „akkor” keletkező lengéseknek, csak akkor van jelentőségük, ha rádiuszt, vagy kúpot akarunk bele karmizsálni egy anyagba. Következésképpen az anyagon kívüli fogásvételkor csak a levegőt karmizsálja össze az a csúnya léptetőmotor.
Na igen!
Gravírozáskor bekavarhat egy kicsit. De hát, ettől lesz a kép egyedi és soha meg nem ismételhető.
Na igen!
Gravírozáskor bekavarhat egy kicsit. De hát, ettől lesz a kép egyedi és soha meg nem ismételhető.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 29, 10:10
Írta: 3k74cecek Dátum 2008 december 29, 10:10
Az egységugrásnak nem rádiusz meg kúp stb. esetén van jelentősége.
A tényleges működés közben az analóg vezérlésekben nem használnak egységugrás jelet a vezérlésnél.
Ezt a rendszer vizsgálatára használják. Arra is leginkább az elméleti számításoknál.
De lehet gyakorlati mérésekre is használni, hogy megtudjuk az elméleti számításokat a gyakorlat is igazolja-e.
Vagy ha a rendszer olyan bonyolult, hogy egyszerűbb mérni, mint számolni.
A mérést viszont körültekintően kell összeállítani, mert nagyon könnyen átverhetjük magunkat.
A digitális technikában, ahol impulzusok vannak ott akár azt is mondhatnánk, hogy csak egységugrások vannak,
de ez azért sok esetben becsapós.
Vegyünk egy léptető vezérlőt a hozzá tartozó motorral.
A vezérlő bemenetét nézve egységugrásnak tekinthető a vezérlő jel.
Ha a vezérlő mikrolépéses, akkor a motor viszont már messze nem egységugrás jelet fog kapni, mert az elektronika már nem azt ad a motorra.
Így pl. egy ilyen mérés már nem egészen olyan eredményt ad, mintha ténylegesen egységugrás jelet kapna a motor.
Egy léptetőmotorra tényleges egységugrást csak olyan elektronikával lehet egyszerűen adni, ami a kimentére
kapcsoló elemekkel, csak kétféle állopú jelet tud adni, és azt is olyan gyorsan, hogy az a motor szempontjából nézve egységugrásnak legyen tekinthető.
Ekkor viszont az már nem mikrolépéses üzemmód.
Pl. Tibor45 mérésén is kétféle időállandó látszik. A görbe kezdő része jóval laposabban indul, aztán hirtelen egy meredekebbre vált.
Ezt szinte biztosan a motorvezérlő elektronika okozza, így a jelleggörbe nem egy motor, hanem egy vezérlő-motor rendszer jelleggörbéje valójában.
Ezért egy ilyen görbe kiértékelése sem egyszerű, ha nem áll rendelkezésre a rendszer egyéb pontjain mért állapotok adata.
Lengések akkor is keletkezhetnek, ha a vizsgált rendszer nem egységugrás jelet kap, csak akkor kisebb lesz a lengés amplitúdója.
Hogy ez a lengés mennyire terjed tovább a hajtásláncon az rengeteg egyéb dologtól függ, ebbe most nem megyek bele.
Az esetek többségében csak töredéke, vagy semmi sem ér el a lánc végére.
A tényleges működés közben az analóg vezérlésekben nem használnak egységugrás jelet a vezérlésnél.
Ezt a rendszer vizsgálatára használják. Arra is leginkább az elméleti számításoknál.
De lehet gyakorlati mérésekre is használni, hogy megtudjuk az elméleti számításokat a gyakorlat is igazolja-e.
Vagy ha a rendszer olyan bonyolult, hogy egyszerűbb mérni, mint számolni.
A mérést viszont körültekintően kell összeállítani, mert nagyon könnyen átverhetjük magunkat.
A digitális technikában, ahol impulzusok vannak ott akár azt is mondhatnánk, hogy csak egységugrások vannak,
de ez azért sok esetben becsapós.
Vegyünk egy léptető vezérlőt a hozzá tartozó motorral.
A vezérlő bemenetét nézve egységugrásnak tekinthető a vezérlő jel.
Ha a vezérlő mikrolépéses, akkor a motor viszont már messze nem egységugrás jelet fog kapni, mert az elektronika már nem azt ad a motorra.
Így pl. egy ilyen mérés már nem egészen olyan eredményt ad, mintha ténylegesen egységugrás jelet kapna a motor.
Egy léptetőmotorra tényleges egységugrást csak olyan elektronikával lehet egyszerűen adni, ami a kimentére
kapcsoló elemekkel, csak kétféle állopú jelet tud adni, és azt is olyan gyorsan, hogy az a motor szempontjából nézve egységugrásnak legyen tekinthető.
Ekkor viszont az már nem mikrolépéses üzemmód.
Pl. Tibor45 mérésén is kétféle időállandó látszik. A görbe kezdő része jóval laposabban indul, aztán hirtelen egy meredekebbre vált.
Ezt szinte biztosan a motorvezérlő elektronika okozza, így a jelleggörbe nem egy motor, hanem egy vezérlő-motor rendszer jelleggörbéje valójában.
Ezért egy ilyen görbe kiértékelése sem egyszerű, ha nem áll rendelkezésre a rendszer egyéb pontjain mért állapotok adata.
Lengések akkor is keletkezhetnek, ha a vizsgált rendszer nem egységugrás jelet kap, csak akkor kisebb lesz a lengés amplitúdója.
Hogy ez a lengés mennyire terjed tovább a hajtásláncon az rengeteg egyéb dologtól függ, ebbe most nem megyek bele.
Az esetek többségében csak töredéke, vagy semmi sem ér el a lánc végére.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 29, 11:26
Írta: 000000000 Dátum 2008 december 29, 11:26
Körülbelül egyről beszélünk. Pontosabban, hasonlókat akartam kinyögni, csak nem jött össze.
Arra próbáltam volna én is helyezni a hangsúlyt, hogy mikor és milyen gondokat vet fel az, ha a szerszám nem igazán tudja lekövetni a programkód által elvárt pályát.
Ezt az egységugrás dolgot én csak „ákádémikus” szőrszálhasogatásnak vélem. Bár, még egyetlen gépet sem építettem.
De ez nem sokáig lesz így!
A télen úgysem kell sem a benzines fűnyíróm, sem a szintén benzines rotációs kapám.
Arra próbáltam volna én is helyezni a hangsúlyt, hogy mikor és milyen gondokat vet fel az, ha a szerszám nem igazán tudja lekövetni a programkód által elvárt pályát.
Ezt az egységugrás dolgot én csak „ákádémikus” szőrszálhasogatásnak vélem. Bár, még egyetlen gépet sem építettem.
De ez nem sokáig lesz így!
A télen úgysem kell sem a benzines fűnyíróm, sem a szintén benzines rotációs kapám.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 29, 11:32
Írta: 000000000 Dátum 2008 december 29, 11:32
Úgy látom, nem tanulsz az eddigi hibáidból,
és nincs szakmai önkritikád.:) Persze ha szeretsz
szerepelni, az más, de kár mindig újabb és
újabb jelét adni annak, hogy csak beszélsz
ezen vizsgálatokról kellő tudás nélkül.
Pl. megint ilyeneket írsz:
"Ha a vezérlő mikrolépéses, akkor a motor
viszont már messze nem egységugrás jelet fog
kapni, mert az elektronika már nem azt ad a
motorra."
Miért is? Hiszen néhány mikrosec alatt
X mikrostep impulzussal éppen olyan állapotban
van a vezérlő, mintha a motor ms-os
nagyságrendű időállandója szempontjából
gyakorlatilag nulla idő alatt a 3.6 fok
parancs kiadásra kerülne. És manapság egy átlagos mikrosteppes vezérlő minimális
elvárható léptetési frekije legalább 200-300 KHz.
Vagy pl:
"A tényleges működés közben az analóg
vezérlésekben nem használnak egységugrás jelet
a vezérlésnél."
1. Az egységugrás jel független attól, hogy
digitális vagy analóg formában állítom elő, a
tartalma, jellege a lényeges.
2. Így az is mindegy, hogy analóg vagy digitális
maga a vezérlő.
3. Pl. egy egyszerű sarok állandó, minél
nagyobb sebességú megmunkálása már felveti ezt a problémát, a millió 3D felületi elemek
marásánál szintén állandó probléma az igen nagy meredekségű, a gyakorlat szempontjából kvázi
egységugrásnak tekinthető hajtó motor
igénybevétel. Ezek nem tudom, miért nem tényleges működést jelentenek számodra.
Egyébként lassan nem győzöm a szakmai hibáidat,
melléfogott okoskodásaidat kijavítgatni a témában,
így azt hiszem, a közeljövőben ha továbbra is ennyire bátran írsz ilyen kevés tudással ebben
a témakörben, csak tételesen mutatok rá a
sületlenségeidre, elvégre nincs időm ilyesmire
korlátlanul.
és nincs szakmai önkritikád.:) Persze ha szeretsz
szerepelni, az más, de kár mindig újabb és
újabb jelét adni annak, hogy csak beszélsz
ezen vizsgálatokról kellő tudás nélkül.
Pl. megint ilyeneket írsz:
"Ha a vezérlő mikrolépéses, akkor a motor
viszont már messze nem egységugrás jelet fog
kapni, mert az elektronika már nem azt ad a
motorra."
Miért is? Hiszen néhány mikrosec alatt
X mikrostep impulzussal éppen olyan állapotban
van a vezérlő, mintha a motor ms-os
nagyságrendű időállandója szempontjából
gyakorlatilag nulla idő alatt a 3.6 fok
parancs kiadásra kerülne. És manapság egy átlagos mikrosteppes vezérlő minimális
elvárható léptetési frekije legalább 200-300 KHz.
Vagy pl:
"A tényleges működés közben az analóg
vezérlésekben nem használnak egységugrás jelet
a vezérlésnél."
1. Az egységugrás jel független attól, hogy
digitális vagy analóg formában állítom elő, a
tartalma, jellege a lényeges.
2. Így az is mindegy, hogy analóg vagy digitális
maga a vezérlő.
3. Pl. egy egyszerű sarok állandó, minél
nagyobb sebességú megmunkálása már felveti ezt a problémát, a millió 3D felületi elemek
marásánál szintén állandó probléma az igen nagy meredekségű, a gyakorlat szempontjából kvázi
egységugrásnak tekinthető hajtó motor
igénybevétel. Ezek nem tudom, miért nem tényleges működést jelentenek számodra.
Egyébként lassan nem győzöm a szakmai hibáidat,
melléfogott okoskodásaidat kijavítgatni a témában,
így azt hiszem, a közeljövőben ha továbbra is ennyire bátran írsz ilyen kevés tudással ebben
a témakörben, csak tételesen mutatok rá a
sületlenségeidre, elvégre nincs időm ilyesmire
korlátlanul.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 29, 11:57
Írta: s7manbs8 Dátum 2008 december 29, 11:57
Igyekezzél a gépépítéssel, ha télen akarod hogy kész legyen, mivel ha nem hallottad volna akkora az éghajlatváltozás, hogy lehet már csak 3 heted van a tél végéig, utánna mehetsz is nyaralni.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 29, 11:59
Írta: s7manbs8 Dátum 2008 december 29, 11:59
Mostmár értem miért olyan fontos nektek az egységugrás milyensége, a leírtakban a 3. pontod rávilágít a lényegre, ha valakinek eddig nem lett volna világos.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 29, 11:59
Írta: 000000000 Dátum 2008 december 29, 11:59
Követelemhogymindenkimongyonle!
A szakmai részen túl is vagyunk.
Szerintem, Szigma arra tért ki, hogy a motornak szánt jel, csak köszönőviszonyban, vagy még abban sincs egy elméleti négyszögjellel. Már ott lehetnek túllövések, lengések, amit aztán a motor több, kevesebb sikerrel átvesz. A mozgatandó mechanika pedig „vérmérsékletétől” függően vagy átvesz, vagy nem.
A múltkor is említettem, hogy a hibákat nem biztos, hogy CSAK a léptetőmotor produkálja.
A szakmai részen túl is vagyunk.
Szerintem, Szigma arra tért ki, hogy a motornak szánt jel, csak köszönőviszonyban, vagy még abban sincs egy elméleti négyszögjellel. Már ott lehetnek túllövések, lengések, amit aztán a motor több, kevesebb sikerrel átvesz. A mozgatandó mechanika pedig „vérmérsékletétől” függően vagy átvesz, vagy nem.
A múltkor is említettem, hogy a hibákat nem biztos, hogy CSAK a léptetőmotor produkálja.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 29, 12:06
Írta: 000000000 Dátum 2008 december 29, 12:06
Nagyon remélem, hogy a próféta szól Belőled!
Meg sem kezdődött a hideg, de már nagyon unom.
Még mindig a vázzal vagyok elfoglalva. Magammal nem sikerült még dűlőre vergődnöm.
Pontosan tudom, hogy nehéz eset vagyok.
Bár, ez nem léptető motor, de azon bénázok, hogy egy öntvény ágyon nem sokat kell megmunkálni, akkor miért csavarodna?
Az is lehet, hogy majd rájövök. (Hogy tévedtem).
Amíg nincsen ágy, nem tudom, hogy mekkora is legyen a léptetőmotor.
Meg sem kezdődött a hideg, de már nagyon unom.
Még mindig a vázzal vagyok elfoglalva. Magammal nem sikerült még dűlőre vergődnöm.
Pontosan tudom, hogy nehéz eset vagyok.
Bár, ez nem léptető motor, de azon bénázok, hogy egy öntvény ágyon nem sokat kell megmunkálni, akkor miért csavarodna?
Az is lehet, hogy majd rájövök. (Hogy tévedtem).
Amíg nincsen ágy, nem tudom, hogy mekkora is legyen a léptetőmotor.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 december 29, 12:10
Írta: bmejdz9nu Dátum 2008 december 29, 12:10
A végeredmény azaz a munkadarab számít... :)
Hát igen az A300 nem ijed meg a "behemót" motortól sem...
Kár, hogy ezt az "élvezetet" kihagytad a te vezérlődből... azaz kicsi teljesítményűre csináltad...
(un. "micrómotoros" azaz lassú sebességhez - áttétel - vagy gyenge erejű közvetlen hajtásokhoz)
Egyébként ezek a próbapad és terhelés nélküli motor "tesztek" mégis mire lesznek a gyakorlatban hasznosak?
Hát igen az A300 nem ijed meg a "behemót" motortól sem...
Kár, hogy ezt az "élvezetet" kihagytad a te vezérlődből... azaz kicsi teljesítményűre csináltad...
(un. "micrómotoros" azaz lassú sebességhez - áttétel - vagy gyenge erejű közvetlen hajtásokhoz)
Egyébként ezek a próbapad és terhelés nélküli motor "tesztek" mégis mire lesznek a gyakorlatban hasznosak?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 29, 12:12
Írta: s7manbs8 Dátum 2008 december 29, 12:12
"A vezérlő bemenetét nézve egységugrásnak tekinthető a vezérlő jel.
Ha a vezérlő mikrolépéses, akkor a motor viszont már messze nem egységugrás jelet fog kapni, mert az elektronika már nem azt ad a motorra. "
A második mondatot hogyan érted, miért nem , és milyen elektronikával, mert szerintem van olyan elektronika, ami mikrolépést is ki tud adni egységugrásként (ne a PWM-félékre gondolj) ?
Ha a vezérlő mikrolépéses, akkor a motor viszont már messze nem egységugrás jelet fog kapni, mert az elektronika már nem azt ad a motorra. "
A második mondatot hogyan érted, miért nem , és milyen elektronikával, mert szerintem van olyan elektronika, ami mikrolépést is ki tud adni egységugrásként (ne a PWM-félékre gondolj) ?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 29, 12:18
Írta: s7manbs8 Dátum 2008 december 29, 12:18
Ha bármilyen anyaggal kell megcsinálni valamit, akkor már baj van, mert nem sok olyan anyag van, ami ne változtatná a tulajdonságait, hő, erő, sugárzás, stb. hatására. Az ideális gép, az csak papíron létezik. De azt hiszem ezt egy gyakorlati embernek nem is kell külön hangsúlyozni, mert ők még hamarabb gondolnak erre sokszor, mint akár egy mérnök, mivel ők állnak az eszterga, stb. mellett.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 29, 12:56
Írta: 000000000 Dátum 2008 december 29, 12:56
"Hát igen az A300 nem ijed meg a "behemót" motortól sem...
Kár, hogy ezt az "élvezetet" kihagytad a te vezérlődből... azaz kicsi teljesítményűre csináltad...
(un. "micrómotoros" azaz lassú sebességhez - áttétel - vagy gyenge erejű közvetlen hajtásokhoz)"
Péter! A fenti soraidból egy sem igaz!
Szervo topik #7318:

Szerintem ettől megijedne az A300-ad.:)[#nyes]
Tudod, én néha ilyen "játék micromotoros"
dolgokkal is foglalkozom.:)
És pont azért elég széles a skála, mert az
egségugrás tesztekre is építve megállapítható,
mit kell tudni az adott motorhajtásnak az
optimális feladat végrehajtáshoz annak minden
elektronikai és mechanikai vonzatával együtt.
Ugyanis az elmélet hála a jó égnek az 10W-os mocira és
a 10KW-osra is igaz terhelve vagy terheletlenül.
Csak számodra a fölöslegeses, buta nyers erő és
lomhaság egyenlő a hajtásméretezéssel mulla
egységugrás teszt mellett.:) Hajrá, építsél
még jó sok ilyen gépet így.:)
Kár, hogy ezt az "élvezetet" kihagytad a te vezérlődből... azaz kicsi teljesítményűre csináltad...
(un. "micrómotoros" azaz lassú sebességhez - áttétel - vagy gyenge erejű közvetlen hajtásokhoz)"
Péter! A fenti soraidból egy sem igaz!
Szervo topik #7318:
Szerintem ettől megijedne az A300-ad.:)[#nyes]
Tudod, én néha ilyen "játék micromotoros"
dolgokkal is foglalkozom.:)
És pont azért elég széles a skála, mert az
egségugrás tesztekre is építve megállapítható,
mit kell tudni az adott motorhajtásnak az
optimális feladat végrehajtáshoz annak minden
elektronikai és mechanikai vonzatával együtt.
Ugyanis az elmélet hála a jó égnek az 10W-os mocira és
a 10KW-osra is igaz terhelve vagy terheletlenül.
Csak számodra a fölöslegeses, buta nyers erő és
lomhaság egyenlő a hajtásméretezéssel mulla
egységugrás teszt mellett.:) Hajrá, építsél
még jó sok ilyen gépet így.:)
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 29, 13:02
Írta: 3k74cecek Dátum 2008 december 29, 13:02
Muszáj a PWM-re gondolni, mert anélkül csak erősen fűtőtest elektronika jöhetne szóba.
Nem hinném, hogy egy mai konstrukció ilyen lenne.
Nem hinném, hogy egy mai konstrukció ilyen lenne.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 29, 13:05
Írta: s7manbs8 Dátum 2008 december 29, 13:05
Mint ahogy szeretik a csöves A osztályú erősítőket, mert valamit mégis kapunk cserébe a fűtésért. Az olyan elektronika melegszik is, de hát a cél érdekében szentesíti az eszközt a tesztelő.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 29, 13:24
Írta: 000000000 Dátum 2008 december 29, 13:24
Csak tudnám, mi a lósz.r összefüggés van a PWM
és a teszt között, amikor a PWM periódusideje
minimum 1-2 nagyságrenddel nagyobb, mint a
vizsgált motor időállandó. Erre szokták azt
mondani, bőven elhanyagolható.:)
és a teszt között, amikor a PWM periódusideje
minimum 1-2 nagyságrenddel nagyobb, mint a
vizsgált motor időállandó. Erre szokták azt
mondani, bőven elhanyagolható.:)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 29, 13:26
Írta: 000000000 Dátum 2008 december 29, 13:26
nagyobb -> kisebb Már én is lefáradok ennyi
értelmes vita kapcsán.:)
értelmes vita kapcsán.:)
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 29, 13:44
Írta: 3k74cecek Dátum 2008 december 29, 13:44
Az azért egy egészen más felhasználási terület. A kettőt ebben a vonatkozásban nem szerencsés összehasonlítani.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 29, 13:54
Írta: 000000000 Dátum 2008 december 29, 13:54
Hasogassuk már.
Ha, azok a változások az én szempontomból közömbösek, nem foglalkozok velük.
Éppen ezért soha nem izgatott az elméletileg tökéletes gép. Mivel lehetetlen megcsinálni és szükségem sincsen rá, így nem is foglalkoztat.
Ha, azok a változások az én szempontomból közömbösek, nem foglalkozok velük.
Éppen ezért soha nem izgatott az elméletileg tökéletes gép. Mivel lehetetlen megcsinálni és szükségem sincsen rá, így nem is foglalkoztat.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 29, 14:21
Írta: 3k74cecek Dátum 2008 december 29, 14:21
Teljesen igazad van. A mérnöki gyakorlat is sok esetben komoly elhanyagolásokkal dolgozik,
mert gyakran egyéb szempontok miatt úgysem azt az eredményt fogja használni,
amit 5 oldalon át, integrál meg differenciál egyenletek levezetése után kapna.
Esetleg egyszerűen nem éri meg ennyit dolgozni vele, ha egy egyszerű képlettel is megkapja a hosszú levezetéssel kapható eredményt
pl. 5-10% pontossággal, és még azt is tudja esetleg, hogy merre tér el az eredménye az ideálistól.
Persze lehet bűvészkedni, meg dobálódzni a tudományos kifejezésekkel, de az ettől még csak elméletieskedés marad,
ha a gyakorlatban, más megfontolások miatt úgysem az lesz megvalósítva.
Van aki élvezi ha egy feladat kapcsán elmerülhet az elméleteiben, és 2 heti munkával eljut oda, ahová egy tapasztalt és a feladatot átgondoló ember 5 perc megfontolás után jut el, szinte kapásból elvetve számtalan rossz irányt a megoldásra.
mert gyakran egyéb szempontok miatt úgysem azt az eredményt fogja használni,
amit 5 oldalon át, integrál meg differenciál egyenletek levezetése után kapna.
Esetleg egyszerűen nem éri meg ennyit dolgozni vele, ha egy egyszerű képlettel is megkapja a hosszú levezetéssel kapható eredményt
pl. 5-10% pontossággal, és még azt is tudja esetleg, hogy merre tér el az eredménye az ideálistól.
Persze lehet bűvészkedni, meg dobálódzni a tudományos kifejezésekkel, de az ettől még csak elméletieskedés marad,
ha a gyakorlatban, más megfontolások miatt úgysem az lesz megvalósítva.
Van aki élvezi ha egy feladat kapcsán elmerülhet az elméleteiben, és 2 heti munkával eljut oda, ahová egy tapasztalt és a feladatot átgondoló ember 5 perc megfontolás után jut el, szinte kapásból elvetve számtalan rossz irányt a megoldásra.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 december 29, 15:19
Írta: bmejdz9nu Dátum 2008 december 29, 15:19
Gondolod, hogy a te analóg szervóvezérlőd "nagyságrend-el" jobb? Másabb? Szerintem az A300-hoz hasonlít felépítésileg a legjobban...
Tudod, hogy ezek a paraméterek nem nagyon térhetnek el nagyon egymástól...
Pár tranyón és IC gyorsan keresztülfut a jel és slussz :) Semmi Digital Processing:)
Most a hiba(jel) be- és eltárolásának a módját hagyjuk :)
Persze ha mernél(:) küldeni egy vezérlőt nekem tesztelésre... talán még hinnék a belinkelt... jesszus :)
Miért linkeltél be egy motoradatlapot? Hogy jön ez ide? Ez az álmod - ezt meghajtani?
Egy 400Nm-es motorral "ellátott" autó is tud lépésben menni :) Sőt számodra persze hihetetlen módon gyorsulni is nagyon :)
De mardjnk a léptetőnél... mert off topikot csinálunk... és törlöm magamat és téged is :)
Tudod, hogy ezek a paraméterek nem nagyon térhetnek el nagyon egymástól...
Pár tranyón és IC gyorsan keresztülfut a jel és slussz :) Semmi Digital Processing:)
Most a hiba(jel) be- és eltárolásának a módját hagyjuk :)
Persze ha mernél(:) küldeni egy vezérlőt nekem tesztelésre... talán még hinnék a belinkelt... jesszus :)
Miért linkeltél be egy motoradatlapot? Hogy jön ez ide? Ez az álmod - ezt meghajtani?
Egy 400Nm-es motorral "ellátott" autó is tud lépésben menni :) Sőt számodra persze hihetetlen módon gyorsulni is nagyon :)
De mardjnk a léptetőnél... mert off topikot csinálunk... és törlöm magamat és téged is :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 29, 17:10
Írta: 000000000 Dátum 2008 december 29, 17:10
Tibor!
Szép és hasznos az üres motorral felvett teszt görbéd.
Kérdésem:
-változik-e a görbe, ha léptecst a teljes mechanika mozgásával ellenőriznénk (valós útmérés)ugyanis a pontosság és felületi minőség romlást amit írsz nehezen tudom értelmezni.
Ugyanis 4 évvel ezelőtt épített gépemnél az alábbi paraméterek a meghatározóak:
-16x5 mm golyós orsó
-1:2,5 lassító motor áttétel
-azaz 2 mm 1 motorfordulat
-1/16 mikrostepp vezérlés
-igazából max 2000 mm/perc utazási és max 1500 mm/perc megmunkálási sebességet tudok vele biztonságosan használni
Namost a pontosság!
Eddig (4 évvel ezelőttig is az esztergánál bevált tolómérőt használtam) a tolómérővel mért pontosság is elég volt ahol erre nagy szükség van pl. egy csapágyház esetén, mert a 32 mm-es fészek az tényleg 0,01 mm alatti pontosságú ha kimarózom.
A felületek meg alu esetén is szemet gyönyörködtetőek.
Nem értem mi ez a nagyfokú bizalmatlanság keltés a léptecsekkel kapcsolatban mostanában.
Szóval szét kellene választani az itteni hobby-kisipari felhasználási igényeket a NASA pontosságú és nagyipari felhasználástól.
Ezt komolyan azért írom, mert ha 4 évvel ezelőtt ilyeneket olvasok nem biztos hogy belemertem volna fogni egy gép építésbe.
Szép és hasznos az üres motorral felvett teszt görbéd.
Kérdésem:
-változik-e a görbe, ha léptecst a teljes mechanika mozgásával ellenőriznénk (valós útmérés)ugyanis a pontosság és felületi minőség romlást amit írsz nehezen tudom értelmezni.
Ugyanis 4 évvel ezelőtt épített gépemnél az alábbi paraméterek a meghatározóak:
-16x5 mm golyós orsó
-1:2,5 lassító motor áttétel
-azaz 2 mm 1 motorfordulat
-1/16 mikrostepp vezérlés
-igazából max 2000 mm/perc utazási és max 1500 mm/perc megmunkálási sebességet tudok vele biztonságosan használni
Namost a pontosság!
Eddig (4 évvel ezelőttig is az esztergánál bevált tolómérőt használtam) a tolómérővel mért pontosság is elég volt ahol erre nagy szükség van pl. egy csapágyház esetén, mert a 32 mm-es fészek az tényleg 0,01 mm alatti pontosságú ha kimarózom.
A felületek meg alu esetén is szemet gyönyörködtetőek.
Nem értem mi ez a nagyfokú bizalmatlanság keltés a léptecsekkel kapcsolatban mostanában.
Szóval szét kellene választani az itteni hobby-kisipari felhasználási igényeket a NASA pontosságú és nagyipari felhasználástól.
Ezt komolyan azért írom, mert ha 4 évvel ezelőtt ilyeneket olvasok nem biztos hogy belemertem volna fogni egy gép építésbe.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 29, 17:53
Írta: 000000000 Dátum 2008 december 29, 17:53
Szia RC!
A Te léptecses géped teljesen szinkronban van mindazzal,
amiről itt összességében szó van, és a mérési
eredmények is kimutatnak az elmélettel egyezően.
"-1:2,5 lassító motor áttétel"
Ezért vagy elégedett, és lehetsz is, és egyben
ez a magyarázat mindenre.
Remek műszaki érzékkel, tudással lassító áttételt
alkalmaztál, ami lineárisan lecsökkentette
a motorod pozícióhibáit (rezgéseit) a megmunkálásoknál,
és nagyot segített a maximális dinamikában is
(redukált J), amire a léptetőmotoros hajtásnak
méginkább fontosabb, mint a szervonál, hiszen alig van mágnesbe öntött "hibatárolója".
Ettől függetlenül nyugodj meg, a Te motorod
tengelye is terheléssel együtt is hasonló jelenségeket mutat, mint a mérés.
Igazából egy ilyen mérési elrendezés arra is
kiváló, hogy a gépre felteszünk egy 200 vonal/mm
körüli lineáris encodert és magát a végeredményt, azaz
a tényleges elmozdulást mérjük ki.
Az én hozzászólásaimból sokan, Te is tévesen
azt látjátok, hogy a műszaki tényekkel "riogatás"
a szándom. Ellenkezőleg, aki itt ésszel él a
Fórumon, már nagyon sok olyan dolgot is megtapasztalhatott, hogy a "riasztó"
alapjelenségre javasolt műszaki terápia mennyit javít a helyzeten. A Te géped optimálisnak
nevezhető, amire használod, tökéletesen jó.
Gratulálok hozzá Neked!
Akik meg csökönyösek, és mindent úgyis üres
dumával megmagyaráznak, mem foglalkoznak
a műszaki tény, optimum szempontokkal, azok
magukra vessenek.:)
A Te léptecses géped teljesen szinkronban van mindazzal,
amiről itt összességében szó van, és a mérési
eredmények is kimutatnak az elmélettel egyezően.
"-1:2,5 lassító motor áttétel"
Ezért vagy elégedett, és lehetsz is, és egyben
ez a magyarázat mindenre.
Remek műszaki érzékkel, tudással lassító áttételt
alkalmaztál, ami lineárisan lecsökkentette
a motorod pozícióhibáit (rezgéseit) a megmunkálásoknál,
és nagyot segített a maximális dinamikában is
(redukált J), amire a léptetőmotoros hajtásnak
méginkább fontosabb, mint a szervonál, hiszen alig van mágnesbe öntött "hibatárolója".
Ettől függetlenül nyugodj meg, a Te motorod
tengelye is terheléssel együtt is hasonló jelenségeket mutat, mint a mérés.
Igazából egy ilyen mérési elrendezés arra is
kiváló, hogy a gépre felteszünk egy 200 vonal/mm
körüli lineáris encodert és magát a végeredményt, azaz
a tényleges elmozdulást mérjük ki.
Az én hozzászólásaimból sokan, Te is tévesen
azt látjátok, hogy a műszaki tényekkel "riogatás"
a szándom. Ellenkezőleg, aki itt ésszel él a
Fórumon, már nagyon sok olyan dolgot is megtapasztalhatott, hogy a "riasztó"
alapjelenségre javasolt műszaki terápia mennyit javít a helyzeten. A Te géped optimálisnak
nevezhető, amire használod, tökéletesen jó.
Gratulálok hozzá Neked!
Akik meg csökönyösek, és mindent úgyis üres
dumával megmagyaráznak, mem foglalkoznak
a műszaki tény, optimum szempontokkal, azok
magukra vessenek.:)
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 december 29, 20:37
Írta: bmejdz9nu Dátum 2008 december 29, 20:37
Ez az áttétel mánia... :) Az encodert is lehetne növelni :) ha nem kell a sebesség...
Na mindegy majd ezen is túl leszünk mint a 4X-en :)
Na mindegy majd ezen is túl leszünk mint a 4X-en :)
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2008 december 29, 20:48
Írta: Motoros Dátum 2008 december 29, 20:48
"Ezt komolyan azért írom, mert ha 4 évvel ezelőtt ilyeneket olvasok nem biztos hogy belemertem volna fogni egy gép építésbe."
Hasonlóképpen látom én is mint rc kolléga.
A felületes olvasó (vagy tán nem is annyira felületes) azt látja hogy a szervó az egekbe lett itt ( a hobby cnc fórumon) emelve miközben a léptecsek porig vannak alázva. Ez sokakat elriaszthat teljesen alaptalanul. A világban komoly cégek mintha nem olvasnák ezt a fórumot töretlenűl gyártják a léptetős gépeket.
Úgy érzékelem hogy kicsit aránytévesztésben vagyunk és talán a verebet akarjuk ágyúval lelőni.
Hasonlóképpen látom én is mint rc kolléga.
A felületes olvasó (vagy tán nem is annyira felületes) azt látja hogy a szervó az egekbe lett itt ( a hobby cnc fórumon) emelve miközben a léptecsek porig vannak alázva. Ez sokakat elriaszthat teljesen alaptalanul. A világban komoly cégek mintha nem olvasnák ezt a fórumot töretlenűl gyártják a léptetős gépeket.
Úgy érzékelem hogy kicsit aránytévesztésben vagyunk és talán a verebet akarjuk ágyúval lelőni.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 december 29, 21:39
Írta: bmejdz9nu Dátum 2008 december 29, 21:39
Hát ez az... Gondoljunk pl. a Bunguard gépeire... de sorolhatnám...pl. ma (még?) minden "hobby széria" CNC gép léptetővel készül...
A szervó csak akkor "kifizetődő" ha igen nagy erők vagy nagy sebesség kell... Ekkor még olcsóbb is lehet (kb. ekkor egy 5A feletti step hajtás "helyettesítő" megoldásra gondolok)
Sajnos(?)... A szervó olyan "képbe" került, hogy szerzek valamilyen DC motort és "összepittyentek" egy vezérlőt... slussz...:)
Sajnos ez így messze nem igaz...(de majd az élet, a valóság bizonyítja)
Sajnos a jó szervómotor + vezérlő... nem ilyen egyszerű és nem is olyan olcsó mint előszörre kinéz...
Én ha egy léptetőmotorral is megoldható hajtást mégis szervóval csinálok annak "luxus" okai vannak... (pl. zajtalan)
Én sem "ásnám el" a léptetős hajtást... holott teljesen szervópárti vagyok :)
A szervó csak akkor "kifizetődő" ha igen nagy erők vagy nagy sebesség kell... Ekkor még olcsóbb is lehet (kb. ekkor egy 5A feletti step hajtás "helyettesítő" megoldásra gondolok)
Sajnos(?)... A szervó olyan "képbe" került, hogy szerzek valamilyen DC motort és "összepittyentek" egy vezérlőt... slussz...:)
Sajnos ez így messze nem igaz...(de majd az élet, a valóság bizonyítja)
Sajnos a jó szervómotor + vezérlő... nem ilyen egyszerű és nem is olyan olcsó mint előszörre kinéz...
Én ha egy léptetőmotorral is megoldható hajtást mégis szervóval csinálok annak "luxus" okai vannak... (pl. zajtalan)
Én sem "ásnám el" a léptetős hajtást... holott teljesen szervópárti vagyok :)
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 29, 21:58
Írta: 3k74cecek Dátum 2008 december 29, 21:58
Már megtanulhattad volna, hogy az áttétel és az egységugrás teszt a gyógyír minden problémára.[#csodalk][#nevetes2]
Cím: Re:Léptetőmotor
Írta: Szedlay Pál Dátum 2008 december 29, 22:09
Írta: Szedlay Pál Dátum 2008 december 29, 22:09
RC!
Én úgy szeretnék hinni mindenkinek aki ilyen pontosságot leír.
Én venném a fáradságot és vinnék anyagot olyat amit akarsz. Te kimarod századon belüli pontossággal a csapágyfészket én elvinném egy akreditált mérőlaborba ahol mikronos pontossággal bemérik a furatot. Ha századon kívüli a tűrés átmérőben és merőlegességben akkor Te fizeted a mérési jegyzőkönyv árát ha belül van akkor én. Ekkor pontosan megtudnánk milyen pontos a megmunkálás. Mi a véleményed?
Én úgy szeretnék hinni mindenkinek aki ilyen pontosságot leír.
Én venném a fáradságot és vinnék anyagot olyat amit akarsz. Te kimarod századon belüli pontossággal a csapágyfészket én elvinném egy akreditált mérőlaborba ahol mikronos pontossággal bemérik a furatot. Ha századon kívüli a tűrés átmérőben és merőlegességben akkor Te fizeted a mérési jegyzőkönyv árát ha belül van akkor én. Ekkor pontosan megtudnánk milyen pontos a megmunkálás. Mi a véleményed?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 29, 22:15
Írta: 000000000 Dátum 2008 december 29, 22:15
Szia Péter! Egész jó tanítványod van Szigma
személyében. Hiába a sületlenség meg a duma
a semmiről ragályos, és divat lett itt a
Fórumomn.:) [#nevetes1]
személyében. Hiába a sületlenség meg a duma
a semmiről ragályos, és divat lett itt a
Fórumomn.:) [#nevetes1]
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2008 december 29, 22:57
Írta: 3k74cecek Dátum 2008 december 29, 22:57
Ebből neked semmi hasznod sincsen, csak dolgozol, furikázol.
Legalább olyan feltételeket adjál amin nyersz is a végén valamit.[#lookaround]
Legalább olyan feltételeket adjál amin nyersz is a végén valamit.[#lookaround]
Cím: Re:Léptetőmotor
Írta: x4rhew5r3 Dátum 2008 december 29, 23:14
Írta: x4rhew5r3 Dátum 2008 december 29, 23:14
Teljes félreértés van néhány dologgal kapcsolatban.
Senki nem mondja, hogy le a léptecsekkel. Az valóban zavaró lehet, hogy ha az egységugrás, a teljesen természetes lengedezések, vagy a mikrolépés pontossága kerül a vita középpontjában, akkor elbizonytalanodik az olvasó, ha nem a vizsgálódást és az értelmezést olvassa ki hozzászólásokból.
Egységugrás. Elméletet is igénylő olvasónak természetes, hogy minden időállandóval rendelkező rendszer egyik elemi vizsgálati módszere az egységugrásra adott válasz elemzése, legyen az léptetőmotor, szervó, hifi erősítő, hőfokszabályozó... Azon kár vitázni, hogy ez kell vagy nem kell, mert a dinamikus rendszereknél ez olyan, mint a statikus rendszereknél az Ohm törvény (elemi). Aki érti, sok kérdésre választ tud találni az olyan válaszfüggvényekből, amit Tibor45 készített és tett közzé. Köszönet érte.
Aki gyakorlati oldalról közelíti a dolgokat, nyugodtan átlépheti ezeket a vitákat, mert csak zavaró lehet a hamis következtetés, és az ököl - vagy ökör?:) - szabályok betartásával is használható, jó eredményre juthat.
Lengések. Már hogyne lengedezne? Mindenki léptecse lengedezik. Kié jobban, kié kevésbé. Most, hogy tudjuk, nem lett rosszabb az a sok lépteccsel készült gép, amivel gyönyörű dolgokat martunk, és fogunk marni a jövőben is. Az egész motor egy lengő rendszer, mert nincs benne mechanikus ütköző, vagy retesz, amikor a következő stabil állapotba lép. Az a tartónyomaték, amit a tekercs áramával keltett mágneses tér és az állandómágnes terének kölcsönhatásával jön létre, majd akkor fogja visszahúzni a stabil állapot felé, ha már túllendült. És ez így megy egy pár csillapodó perióduson keresztül, amíg megtalálja a stabil helyét.
Mikrolépés. Ha lehet, alkalmazni kell, mert csak javíthat az - amúgy sem rossz - rendszeren. Persze ezt is módjával. Ha azt olvassuk, hogy akár 10-30%-os is lehet a hiba, nem kell megijedni. Az a hiba az egészlépések közötti mikrolépések linearitási hibája. A mikrolépésnél a kezdő és végpont egy-egy szomszédos egészlépés, soha nem akar ebből a tartományból kilépni. Ha a felbontást és a pontosságot az egész lépésekre terveztük, akkor semmit nem ront a helyzeten, csak az előnyös tulajdonságok érvényesülnek. Simább járás, kisebb rezonanciák. Valaki egyszer írta is, hogy egész lépésekkel a kör marásánál szétrázta a házat, majd mikrolépést alkalmazva megszelídült a gép. Azt mondanám, hogy tervezzünk egész lépésre, és alkalmazzunk olyan kicsi mikrolépést, amit mozgásvezérlő programunk step-frekiben képes meghajtani. Aztán innen a kompromisszumok elfogadásával mehetünk a fél-, negyed-, vagy nyolcad lépésig a tervezéssel, ha éppen nagy emelkedésű orsót sikerült bontani...
Ez egy vélemény, nem azért írtam, hogy az eddig is meggyőzhetetlen feleket újabb menetre invitáljam. Természetesen ha tárgyi tévedés van a hozzászólásomban, azt javítsátok.
Senki nem mondja, hogy le a léptecsekkel. Az valóban zavaró lehet, hogy ha az egységugrás, a teljesen természetes lengedezések, vagy a mikrolépés pontossága kerül a vita középpontjában, akkor elbizonytalanodik az olvasó, ha nem a vizsgálódást és az értelmezést olvassa ki hozzászólásokból.
Egységugrás. Elméletet is igénylő olvasónak természetes, hogy minden időállandóval rendelkező rendszer egyik elemi vizsgálati módszere az egységugrásra adott válasz elemzése, legyen az léptetőmotor, szervó, hifi erősítő, hőfokszabályozó... Azon kár vitázni, hogy ez kell vagy nem kell, mert a dinamikus rendszereknél ez olyan, mint a statikus rendszereknél az Ohm törvény (elemi). Aki érti, sok kérdésre választ tud találni az olyan válaszfüggvényekből, amit Tibor45 készített és tett közzé. Köszönet érte.
Aki gyakorlati oldalról közelíti a dolgokat, nyugodtan átlépheti ezeket a vitákat, mert csak zavaró lehet a hamis következtetés, és az ököl - vagy ökör?:) - szabályok betartásával is használható, jó eredményre juthat.
Lengések. Már hogyne lengedezne? Mindenki léptecse lengedezik. Kié jobban, kié kevésbé. Most, hogy tudjuk, nem lett rosszabb az a sok lépteccsel készült gép, amivel gyönyörű dolgokat martunk, és fogunk marni a jövőben is. Az egész motor egy lengő rendszer, mert nincs benne mechanikus ütköző, vagy retesz, amikor a következő stabil állapotba lép. Az a tartónyomaték, amit a tekercs áramával keltett mágneses tér és az állandómágnes terének kölcsönhatásával jön létre, majd akkor fogja visszahúzni a stabil állapot felé, ha már túllendült. És ez így megy egy pár csillapodó perióduson keresztül, amíg megtalálja a stabil helyét.
Mikrolépés. Ha lehet, alkalmazni kell, mert csak javíthat az - amúgy sem rossz - rendszeren. Persze ezt is módjával. Ha azt olvassuk, hogy akár 10-30%-os is lehet a hiba, nem kell megijedni. Az a hiba az egészlépések közötti mikrolépések linearitási hibája. A mikrolépésnél a kezdő és végpont egy-egy szomszédos egészlépés, soha nem akar ebből a tartományból kilépni. Ha a felbontást és a pontosságot az egész lépésekre terveztük, akkor semmit nem ront a helyzeten, csak az előnyös tulajdonságok érvényesülnek. Simább járás, kisebb rezonanciák. Valaki egyszer írta is, hogy egész lépésekkel a kör marásánál szétrázta a házat, majd mikrolépést alkalmazva megszelídült a gép. Azt mondanám, hogy tervezzünk egész lépésre, és alkalmazzunk olyan kicsi mikrolépést, amit mozgásvezérlő programunk step-frekiben képes meghajtani. Aztán innen a kompromisszumok elfogadásával mehetünk a fél-, negyed-, vagy nyolcad lépésig a tervezéssel, ha éppen nagy emelkedésű orsót sikerült bontani...
Ez egy vélemény, nem azért írtam, hogy az eddig is meggyőzhetetlen feleket újabb menetre invitáljam. Természetesen ha tárgyi tévedés van a hozzászólásomban, azt javítsátok.
Cím: Re:Léptetőmotor
Írta: x4rhew5r3 Dátum 2008 december 29, 23:16
Írta: x4rhew5r3 Dátum 2008 december 29, 23:16
az Ohm törvény nem a legjobb, ami ide illik, de már nem tudom javítani...
Cím: Re:Léptetőmotor
Írta: Szedlay Pál Dátum 2008 december 29, 23:18
Írta: Szedlay Pál Dátum 2008 december 29, 23:18
Ebben a felajánlásban semmi nyereség vágy nem volt. Inkább azt szeretném bizonyítani, hogy egy lépteccsel is lehet századon belül dolgozni, vagy nem.
Láttunk már karón varjút.....
Van itt egy kollega aki gyárt nekem alkatrészt, 0.007mm-rel volt tűrésen kívül és két heti munkáját dobtuk a szemétbe egy rossz mikrométer miatt.
Láttunk már karón varjút.....
Van itt egy kollega aki gyárt nekem alkatrészt, 0.007mm-rel volt tűrésen kívül és két heti munkáját dobtuk a szemétbe egy rossz mikrométer miatt.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 30, 00:31
Írta: 000000000 Dátum 2008 december 30, 00:31
Azért jó lenne tudnom mennyibe kerül ez a vizsgálat.
Úgy érzem ha aluba kell marni 20-60 mm közötti csapágyfészket nem kell félnem, mert sokat csináltam és az én mikrométeremmel jók lettek.
Lehet, hogy először azt kellene elküldenem hitelesíteni? De hiszen eddig nem a NASA-nak gyártottam csak SKF csapágyakhoz!
A derékszögességgel még óvatos vagyok, hisz a főorsót csak egy talpasderékszög mérővel állítottam be, nem tudom ez milyen pontosságot ad.
Úgy érzem ha aluba kell marni 20-60 mm közötti csapágyfészket nem kell félnem, mert sokat csináltam és az én mikrométeremmel jók lettek.
Lehet, hogy először azt kellene elküldenem hitelesíteni? De hiszen eddig nem a NASA-nak gyártottam csak SKF csapágyakhoz!
A derékszögességgel még óvatos vagyok, hisz a főorsót csak egy talpasderékszög mérővel állítottam be, nem tudom ez milyen pontosságot ad.
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2008 december 30, 01:16
Írta: 4mjnxdwuu Dátum 2008 december 30, 01:16
Miért ne lehetne jó...?
Nekem a "legdurvább" gépemen 10-es emelkedésű orsó volt közvetlen hajtással, és nekem megfelelt a csapágyház amit csinált. Kicsit meg kellett nyomni a csapágyat és szépen belement. ( bár soha nem néztem meg órával. Az, hogy szépen húzósan ment bele nekem már jó volt. ( lehet, hogy igénytelen vagyok.)
A következő gépemen már 20-as emelkedésű orsó van... ( de azzal nem is akarok csapágyházat csinálni...) Ez is léptetős, én még nem írtam le őket... /Még van rajta némi lemez munka, aztán mehet bele a vezérlő.

Nekem a "legdurvább" gépemen 10-es emelkedésű orsó volt közvetlen hajtással, és nekem megfelelt a csapágyház amit csinált. Kicsit meg kellett nyomni a csapágyat és szépen belement. ( bár soha nem néztem meg órával. Az, hogy szépen húzósan ment bele nekem már jó volt. ( lehet, hogy igénytelen vagyok.)
A következő gépemen már 20-as emelkedésű orsó van... ( de azzal nem is akarok csapágyházat csinálni...) Ez is léptetős, én még nem írtam le őket... /Még van rajta némi lemez munka, aztán mehet bele a vezérlő.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 30, 07:25
Írta: 000000000 Dátum 2008 december 30, 07:25
A léptető, kontra szervo ügyhöz.
Éppen a napokban berheltem szét egy szervos és egy léptetős nyomtatót.
Életükben mindketten jól működtek.
A titok nyitja alighanem az lehet, hogy a szervot szervonak a léptetőt, meg léptetőnek kell használni.
Éppen a napokban berheltem szét egy szervos és egy léptetős nyomtatót.
Életükben mindketten jól működtek.
A titok nyitja alighanem az lehet, hogy a szervot szervonak a léptetőt, meg léptetőnek kell használni.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 december 30, 08:56
Írta: bmejdz9nu Dátum 2008 december 30, 08:56
Ez így teljesen igaz....
Az egységugráshoz csak annyit, hogy én is tesztelem vele a rendszert csak a "T45" típussal nem értek egyet.
(A T45 típus = 128+X step, azaz hogy előbb kifeküdjön az A300 vagy a Gecko)
... Mertugye a kevés(?) hibajeltárolású (~100bit) vezérlőket kedvelem...
Egyébként eddig bármilyen vezérlő járt nálam azokon is - ha lehetett - visszavettem a hibatárolót ezen határokon belülre. (vagy kisebbre)
Azért tetszik ez a teszt dolog itt mert rávilágít arra, hogy a léptető sem tud sok hibát tárolni (pár bit - egész lépésen belül)... és ugyebár a step/dir-es szoftvereket, stepper motorokhoz írták, tehát ez mindennek az alapja azaz az "alapelméleten" a szervó sem tud átlépni.
Az egységugráshoz csak annyit, hogy én is tesztelem vele a rendszert csak a "T45" típussal nem értek egyet.
(A T45 típus = 128+X step, azaz hogy előbb kifeküdjön az A300 vagy a Gecko)
... Mertugye a kevés(?) hibajeltárolású (~100bit) vezérlőket kedvelem...
Egyébként eddig bármilyen vezérlő járt nálam azokon is - ha lehetett - visszavettem a hibatárolót ezen határokon belülre. (vagy kisebbre)
Azért tetszik ez a teszt dolog itt mert rávilágít arra, hogy a léptető sem tud sok hibát tárolni (pár bit - egész lépésen belül)... és ugyebár a step/dir-es szoftvereket, stepper motorokhoz írták, tehát ez mindennek az alapja azaz az "alapelméleten" a szervó sem tud átlépni.
Cím: Re:Léptetőmotor
Írta: Szedlay Pál Dátum 2008 december 30, 10:18
Írta: Szedlay Pál Dátum 2008 december 30, 10:18
Január 5.-e után adokr á választ, megkérdezem pontosan két helyen is.
Cím: Re:Léptetőmotor
Írta: HJózsi Dátum 2008 december 30, 10:49
Írta: HJózsi Dátum 2008 december 30, 10:49
Az orvosi nyelven 'Geckobititisz'-nek nevezett szindróma előbb utóbb csőlátáshoz vezet ... [#nyes][#wave]
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 30, 11:21
Írta: s7manbs8 Dátum 2008 december 30, 11:21
A léptetőmotorok pozicionálási pontosságát egyébként meg lehet spékelni egy jó nagyfelbontású encoder és megfelelő vezérlés segítségével, hogy még a motor mechanikája általi hibáktól is megszabaduljunk. Ez esetben nemcsak a rezonanciák miatt alkalmazandó a mikrolépés, hanem a fent említett célból is.
Másik megjegyzésem, hogy viszont a motorok eme hibával terhelt viselkedését, szoftveres úton szintén lehet javítani, amennyiben mérésekkel információt nyújtunk a vezérlő szoftver számára.
Most itt talán nem is részletezném a mikéntjét, mert talán egy szabadalom lehetőség úszna el. Csak gondolatébresztőnek szántam ezeket, ha érthető mire gondoltam, kicsit továbbgondolva benne vannak a megoldások is.
Másik megjegyzésem, hogy viszont a motorok eme hibával terhelt viselkedését, szoftveres úton szintén lehet javítani, amennyiben mérésekkel információt nyújtunk a vezérlő szoftver számára.
Most itt talán nem is részletezném a mikéntjét, mert talán egy szabadalom lehetőség úszna el. Csak gondolatébresztőnek szántam ezeket, ha érthető mire gondoltam, kicsit továbbgondolva benne vannak a megoldások is.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 30, 11:23
Írta: 000000000 Dátum 2008 december 30, 11:23
Ez a hónap poénja volt, köszi Józsi!:))[#nevetes1]
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 30, 11:33
Írta: s7manbs8 Dátum 2008 december 30, 11:33
Ha már annyira a teljesítmény itt a cél nem lehetne megtriplázni a végmeghajtás FET-eket, akkor még nagyobb áramra elég lenne, ha valakinek kevés az A300-ban ami van.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 30, 11:36
Írta: s7manbs8 Dátum 2008 december 30, 11:36
Nemrég néztem meg milyen is az az A300, gondoltam megépítem, de mikor megláttam a rajzát, hogy mennyi alkatrész van benne kissé elment a kedvem a paneltervezéstől.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 30, 11:44
Írta: s7manbs8 Dátum 2008 december 30, 11:44
A mikrolépéssel kapcsolatban, ha valaki még nagyon kezdő, annak annyit tudok mondani tapasztalatből, hogy 1/4-es egészlépés felbontással, már annyira sima a kisebb motorok járása, hogy ekkor szíjhajtásnál sincsen már a szíjnak se annyira káros berezgése, ami miatt lépést téveszt és emellett ehhez még nem is kell nagyon nagy teljesítményű gép, ami a léptetőimpulzusok számításához kell.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 december 30, 17:54
Írta: bmejdz9nu Dátum 2008 december 30, 17:54
Lehetne nagyobbakat is alkalmazni, az IRFP60N egy jó választás ár/fesz/áram arányaiban.
A fetmeghajtók is a legerősebbek közé tartoznak...
A fetmeghajtók is a legerősebbek közé tartoznak...
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 december 30, 17:56
Írta: bmejdz9nu Dátum 2008 december 30, 17:56
Ez a "másolásvédelem" ... [#smile] Sajnos egyszerűbben nem volt megoldható... mert akkor kompromisszumokat kellett volna kötni.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 30, 18:04
Írta: s7manbs8 Dátum 2008 december 30, 18:04
Mindenestre a végfok részét külön is lehet próbálgatni, ha olyan jól bírja az Ampereket, ahogy már említetted párszor. Meg itt a nagy áramokra gondolva, az sem mindegy a panel milyen, mert ha nem jól van tervezve, akkor bizony furcsa dolgok tudnak előjönni nagy teljesítményeknél. Addig amíg kicsiben játszik egy hobbysta nem is gondolná, hogy nem csak annyi, hogy rakjunk bele nagyobbat, hanem előjönnek a zavarjelenségek, és egyszer csak pukk , meg füst a vége.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 december 30, 18:45
Írta: bmejdz9nu Dátum 2008 december 30, 18:45
Bizony - bizony egy 10Kg-os motor jó a háznál tesztelésre... :)
Az "eléjét" lehet másként is megoldani... de a végfok egy (egyszerű, zavarvédett) analog PID-hez lett tesztelve.
Az "eléjét" lehet másként is megoldani... de a végfok egy (egyszerű, zavarvédett) analog PID-hez lett tesztelve.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 30, 20:02
Írta: 000000000 Dátum 2008 december 30, 20:02
CSak mert szép:

Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 30, 20:08
Írta: 000000000 Dátum 2008 december 30, 20:08
De legalább semmi gyakorlati értéke nincs:)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 30, 20:09
Írta: s7manbs8 Dátum 2008 december 30, 20:09
Ezt te rajzoltad, vagy valahonnan való, mert felül stepper motor, alul meg servo Co Ltd. vagy ez mind a kettőt tudja ?
Cím: Re:Léptetőmotor
Írta: 4mjnxdwuu Dátum 2008 december 30, 20:28
Írta: 4mjnxdwuu Dátum 2008 december 30, 20:28
"Japan servo Co Ltd" Gyártó...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 30, 20:55
Írta: 000000000 Dátum 2008 december 30, 20:55
Igen, ma rajzoltam. A hobbycnc talin vettem ebből 3 motort meg van már néhány fix alkatrész, amit beraktam a rendszerbe, aztán rugalmasan alakítom a többit.
No igen, mikor ránéztem itthon, hogy Japan Servo egy pill. nekem is hangosabban vert...de a Co Ltd...megnyugtatott...
No igen, mikor ránéztem itthon, hogy Japan Servo egy pill. nekem is hangosabban vert...de a Co Ltd...megnyugtatott...
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 31, 00:41
Írta: s7manbs8 Dátum 2008 december 31, 00:41
Árulja már el nekem valaki, hogy miért nem tudunk mi léptetőmotort gyártani.
Az alább okok közül választhattok:
- nem elég olcsó a telek a gyáralapításhoz
- nincs vasbánya
- nincs kohó
- nincs mérnök
- nincs piaca a terméknek
- drága a munkaerő
- nem tudunk pontos munkát végezni ?
Ha valamit kihagytam, kérem pótolni !
Az alább okok közül választhattok:
- nem elég olcsó a telek a gyáralapításhoz
- nincs vasbánya
- nincs kohó
- nincs mérnök
- nincs piaca a terméknek
- drága a munkaerő
- nem tudunk pontos munkát végezni ?
Ha valamit kihagytam, kérem pótolni !
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2008 december 31, 08:44
Írta: Motoros Dátum 2008 december 31, 08:44
Az olcsó telek még csak volna, de a többi sztem hiányzik. Lassan már egy lyukat sem tudunk kifúrni[#nemtudom]
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 december 31, 10:11
Írta: bmejdz9nu Dátum 2008 december 31, 10:11
Drága a munkaerő és nem tudunk pontos munkát végezni...
Azaz értékaránytalan... hogy mondják ezt? Megvan ... gazdaságtalan :)
De pl. 1000Ft/Euro árfolyamnál már (majd?) megéri...:) Kb. akkor leszünk versenyképesek a kínai gyártással és munkabérekkel...
Azaz értékaránytalan... hogy mondják ezt? Megvan ... gazdaságtalan :)
De pl. 1000Ft/Euro árfolyamnál már (majd?) megéri...:) Kb. akkor leszünk versenyképesek a kínai gyártással és munkabérekkel...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 31, 10:31
Írta: 000000000 Dátum 2008 december 31, 10:31
Na ezt alkalmazza a kínai állam amikor irreálisan magasan tartja a Dollár árfolyamát, ezért mindent amit exportál hihetetlenül olcsón tudd piacra dobni.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 december 31, 10:37
Írta: bmejdz9nu Dátum 2008 december 31, 10:37
Igen... de pl. az amerikaik viszont "levihetik" a dollárt :) Azaz felértékelődik a Juan...
Ha nálunk ... pl. 1000Ft-os Euronál* te is csodálkoznál mire lennének képesek az emberek...
Egész nap azon járna az esze, hogy lehetne "exportálni" valamit, bármit...
*Az 1000Ft/Euro... nem teljesen alaptalan arány a kínai keresetekhez/árakhoz képest...
Talán így lehet legjobban érzékelni a dolgot...
20.000Ft és 40.000Ft (ez már nagyon magas bér - napi 12 órás munka délen) az átlag kínában...
Ha nálunk ... pl. 1000Ft-os Euronál* te is csodálkoznál mire lennének képesek az emberek...
Egész nap azon járna az esze, hogy lehetne "exportálni" valamit, bármit...
*Az 1000Ft/Euro... nem teljesen alaptalan arány a kínai keresetekhez/árakhoz képest...
Talán így lehet legjobban érzékelni a dolgot...
20.000Ft és 40.000Ft (ez már nagyon magas bér - napi 12 órás munka délen) az átlag kínában...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 31, 10:41
Írta: 000000000 Dátum 2008 december 31, 10:41
Csak mi nem tehetjük ezt meg mert a mezőgazdasági alapanyagokon kívül minden mást be kell hozni az országba, nekik meg csak a kőolajat.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 december 31, 11:09
Írta: bmejdz9nu Dátum 2008 december 31, 11:09
Kajánk van/lesz (talán), ez nagyon fontos!
Ne feledjük Kínában volt éhinség is... Erre ők nagyon-nagyon emlékeznek... Sokan éhen haltak...
Olaj sem kell 1000Ft-os Eurónál, magyar bika húzza az ekét :)
A többi mind luxus (ipar)cikk :) hogy ha van - van ha nincs hát nincs...
És indulhat a léptetőmotor gyártás :) Mert akár 5000Ft-ot (azaz 5 Eurót) is kaphatunk érte...
Ne feledjük Kínában volt éhinség is... Erre ők nagyon-nagyon emlékeznek... Sokan éhen haltak...
Olaj sem kell 1000Ft-os Eurónál, magyar bika húzza az ekét :)
A többi mind luxus (ipar)cikk :) hogy ha van - van ha nincs hát nincs...
És indulhat a léptetőmotor gyártás :) Mert akár 5000Ft-ot (azaz 5 Eurót) is kaphatunk érte...
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2008 december 31, 11:12
Írta: Motoros Dátum 2008 december 31, 11:12
Péter csodálkozok, a végén még közelednek a nézeteink :)
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 december 31, 11:20
Írta: bmejdz9nu Dátum 2008 december 31, 11:20
Képzeld el amikor egy gravírtű (1000Ft/Euro árnál) mennyi Ft-ot érne :) Micsoda mesevilág :)
Persze ekkor esténként a család összejönne és tekergetnénk egy-egy léptetőmotort...:)
Az egész utca ezt csinálná... = kész a motorgyár. Te csinálnád a tegelyét esztergán nekünk :)
Ez már uri meló neked... 1 Euróért azaz már ekkor 1000Ft-ért.
Napi 5db = 30x5=150.000Ft (nincs hétvége:)= te leszel a leggazdagabb a környéken :)
Mint az újgazdagok kínában :) Hát akinek van tehene, vagy esztergája...:)
Persze ekkor esténként a család összejönne és tekergetnénk egy-egy léptetőmotort...:)
Az egész utca ezt csinálná... = kész a motorgyár. Te csinálnád a tegelyét esztergán nekünk :)
Ez már uri meló neked... 1 Euróért azaz már ekkor 1000Ft-ért.
Napi 5db = 30x5=150.000Ft (nincs hétvége:)= te leszel a leggazdagabb a környéken :)
Mint az újgazdagok kínában :) Hát akinek van tehene, vagy esztergája...:)
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2008 december 31, 11:31
Írta: Motoros Dátum 2008 december 31, 11:31
Álmodozzunk csak!! Olyan jólesik :))
BUÉK Mindenkinek
BUÉK Mindenkinek
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2008 december 31, 11:33
Írta: Motoros Dátum 2008 december 31, 11:33
Szerintem olyan idők jönnek hogy nagyobb biztonságban lesz az akinek tehene van mint akinek esztergálya, sőt lehet hogy majd egy kecskével is beérjük ha így folytatódik.
Cím: Re:Léptetőmotor
Írta: bmejdz9nu Dátum 2008 december 31, 12:46
Írta: bmejdz9nu Dátum 2008 december 31, 12:46
Megyek veszek tehenet... :) Az Ebay-on van szerinted? :)
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2008 december 31, 13:07
Írta: Motoros Dátum 2008 december 31, 13:07
[#nevetes1][#nevetes1]
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2008 december 31, 13:15
Írta: s7manbs8 Dátum 2008 december 31, 13:15
Minden országnak megvan a maga súlya a világban, adottságainál fogva, álmodozni lehet, pesszimistának is, (arra még okunk is van). Pedig ezeknek a dolgoknak az okait ugyanolyan szépen lehet látni, mint amikor a Tibor45 képleteit használva számoljuk a CNC gépek hatékonyságát. Csak az a baj, hogy a köznép előtt ezeket nem szeretik mutogatni a politikusok, mert akkor elsírná magát a nép.
Lehet én is veszek holnap egy tehenet, meg kidobom gyorsan a még nem is kész maszek esztergát is. Azonkívül elkezdek tanulni kínaiul, és áttérek a buddhista vallásra. BUÉK ![#rinya]
Lehet én is veszek holnap egy tehenet, meg kidobom gyorsan a még nem is kész maszek esztergát is. Azonkívül elkezdek tanulni kínaiul, és áttérek a buddhista vallásra. BUÉK ![#rinya]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2008 december 31, 21:54
Írta: 000000000 Dátum 2008 december 31, 21:54
Régebben (adott feladathoz, nem szériában) azért készült.

Boldog új évet mindenkinek.
Boldog új évet mindenkinek.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 január 01, 15:36
Írta: s7manbs8 Dátum 2009 január 01, 15:36
A most gyártott léptetőmotoroknál hogyan lehetne jobbakat csinálni ? Kisebb, erősebb,hatékonyabb, stb.
Pl. a tekercselést ezüst-aranyból, a vasmag részeket kisebb veszteségű anyagokkal , jobb mágneses tulajdonságokkal? Amiket használnak általában, azoktól vannak jobbak is, csak aránytalanul drága lenne ? Legalábbis, mint ahogy vannak a nagyon hifi cuccok, ott is aranyozott csatlakozók, ezüst vezetékek, lehetne még sorolni.
Pl. a tekercselést ezüst-aranyból, a vasmag részeket kisebb veszteségű anyagokkal , jobb mágneses tulajdonságokkal? Amiket használnak általában, azoktól vannak jobbak is, csak aránytalanul drága lenne ? Legalábbis, mint ahogy vannak a nagyon hifi cuccok, ott is aranyozott csatlakozók, ezüst vezetékek, lehetne még sorolni.
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2009 január 01, 15:57
Írta: s5f8tmfv3 Dátum 2009 január 01, 15:57
A mostani léptetőmotorok 100%-a ipari termék, szerintem az ipar nem feltétlenül gyárt olyan léptecseket amik aranyárban vannak, hiszen el is kell adni. Biztos hogy lehetne jobbat csinálni, ha valaki már a kohászatban is jártas és képes a motor lelkét adó "vasat" előállítani. Megszállott hifistákról hallottam már akik mérgdrágán építenek kifogástalan készülékeket, de léptecseket még a megvásárolhatókhoz mérhetőt is nehéz volna csinálni nemhogy jobbat. Akkor inkább választanék egy márkásabb/erősebb motort a piacról. Viszont a meglévőt tuningolni nem lehetetlen plusz hűtéssel, újratekeréssel, jobb csatikkal, bár nem tudom van-e aki elkészítse.
Vagy van valami elképzelésed?
Vagy van valami elképzelésed?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 január 01, 16:01
Írta: s7manbs8 Dátum 2009 január 01, 16:01
Nincs elképzelésem, ez a kérdés csak úgy felmerült bennem, mint általános kérdés, hogy hogyan lehet a létezőktől még jobb dolgokat csinálni, mik azok a problémák, amik miatt ez esetleg nem megy.
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2009 január 01, 16:07
Írta: s5f8tmfv3 Dátum 2009 január 01, 16:07
A költség a legnagyobb probléma szerintem, hiszen mindent meg lehet csinálni ha van rá keret. Milyen összetételű egy léptecs vasa? Azt hiszem ez nagyon fontos tényező és komoly szaktudás kell az előállításához. Ha ez menne, akár szervómotort is lehetne készíteni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 január 01, 16:08
Írta: 000000000 Dátum 2009 január 01, 16:08
Gondolj bele, hogy ezen nem csak te gondolkozol, hanem a gyártók is (és ők nem most kezték a fejlesztést)! feltételezem, hogy a lehetőségeket mérlegelve a legjobb ár/érték arányt próbálják elérni. Lehet, hogy tudnának +5%-ot még kipréselni, de 150%-os felárral (tehát aránytalanul drágábban)...
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 január 01, 16:22
Írta: s7manbs8 Dátum 2009 január 01, 16:22
Arra már én is rájöttem, hogy nekem ez se megy, meg az se, az ember minél idősebb, annál több dologról derül ki, hogy az is csak álomkategória, vagy csak bölcsebb lesz, ki tudja. Egyébként pont most így karácsony táján olvasgattam afféle bulvársajtókban, hogy miféle hülyeségeket képesek megvenni a milliomosnak nevezhető emberek. Pl. gyémánttal kirakott táskát, stb. Na most ennek mintájára lehetne készíteni tényleg aranyból léptecsmotort is, hátha arra is akadna vevő. Esetleg valami funkciója is lenne, tehát nemcsak önmagáért. Pl. arany léptecsmotor hajtaná a hifista aranylemezjátszóján a korongcserélőt.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 január 01, 16:27
Írta: 000000000 Dátum 2009 január 01, 16:27
[#vigyor3]CNCFIL...
Ventillátor a fenekébe+jó vastag aranyozott kivezetéd, meg réz hűtőborda az oldalára és máris kész a a "tunig stepper"!
Ventillátor a fenekébe+jó vastag aranyozott kivezetéd, meg réz hűtőborda az oldalára és máris kész a a "tunig stepper"!
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2009 január 01, 16:39
Írta: s5f8tmfv3 Dátum 2009 január 01, 16:39
Olyan motorvezérlőt kell készíteni aminek hallható a PWM-je és mp3-at is le tud játszani. Az vona a menő![#bohoc]
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 január 01, 16:43
Írta: s7manbs8 Dátum 2009 január 01, 16:43
Ilyenre én is gondoltam már.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 január 04, 13:47
Írta: 000000000 Dátum 2009 január 04, 13:47
Én már hallottam olyat, hogy fogta a rádiót (PWM) :)
Bár csak hallomásból...
Bár csak hallomásból...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 január 04, 16:46
Írta: 000000000 Dátum 2009 január 04, 16:46
Amikor az én vezérlőm bekapcsol, elhalgat a rádió.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 január 04, 18:00
Írta: 000000000 Dátum 2009 január 04, 18:00
A titkosszolgálatnál dolgozol? Megalkottad a tökéletesen zavart teret, amit nem lehet lehallgatni.[#smile]
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 január 06, 23:59
Írta: s7manbs8 Dátum 2009 január 06, 23:59
Eszembe jutott erről Gauss, ki később híres matematikus lett, aki kiskorában az adjuk össze a számokat 1-től 100-ig feladatra, hirtelen támadt ötletével száz szám egyenként való összeadása helyett csak össze szorzott 2 számot és meglett az eredmény, mindegy, hogy előtte hány ezer évig ez senkinek nem jutott eszébe ...
Cím: Re:Léptetőmotor
Írta: 4um5b65d Dátum 2009 január 07, 00:24
Írta: 4um5b65d Dátum 2009 január 07, 00:24
Ezen nincs mit csodálkozni, még a rádióban is a vezérlődet figyelik néma csendben.....[#vigyor2]
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 január 07, 00:38
Írta: s7manbs8 Dátum 2009 január 07, 00:38
Off: (vagy uff)
Birodalmi lépegető(motor). Star Wars, ha valaki még nem látta, abban is van pár HD (V.Péter kedvence). [#taps]
Birodalmi lépegető(motor). Star Wars, ha valaki még nem látta, abban is van pár HD (V.Péter kedvence). [#taps]
Cím: Re:Léptetőmotor
Írta: fs9s63xkf Dátum 2009 január 21, 18:18
Írta: fs9s63xkf Dátum 2009 január 21, 18:18
Szigma:
A #1691-ben kért mérések, ahogy ígértem:
Első!
Második!
Harmadik!
Negyedik!
Az 50 fordulat/min nem szerencsés, mert itt a motor nagyon rezonál.
A #1691-ben kért mérések, ahogy ígértem:
Első!
Második!
Harmadik!
Negyedik!
Az 50 fordulat/min nem szerencsés, mert itt a motor nagyon rezonál.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2009 január 22, 00:56
Írta: 3k74cecek Dátum 2009 január 22, 00:56
Köszönöm.
Elég érdekes az eredmény. Noha nem tudom egyértelműen értékelni , mert egyrészt nincs idő lépték, nem tudom biztosan hol van az első léptető jel. Szóval egyes dolgok inkább csak sejthetők, mint tudhatók.
Aztán rájöttem, hogy ez már valójában nem tisztán egy léptetőmotor válasza, hanem egy mikrolépéses vezérlő-motor rendszer válasza.
Itt meg már a jó ég tudja eldönteni (pláne messziről), hogy mi származik a vezérlőtől és mi tisztán a motortól.
Azt hiszem a teljesen precíz méréshez sokkal bonyolultabb mérést kellene összeállítani, de annyit nem ér az egész.
Végül is egy pár alap dolgot úgyis tudunk a motor viselkedéséről. Másrészt olyan széles skálán mozog a tényleges üzemi állapot, hogy abban biztosan vannak nagyon szerencsétlen állapotok is. Pl. itt az 50-es fordulat látszik nagyon szerencsétlennek, de ebből sem lehet sok mindenre következtetni, mert ez egy terheletlen motor mérése.
Gondolkodásra mindenesetre jó volt a dolog.
Úgysem akar senki ilyen hobbi gépekkel mikronos pontosságot, de még a század is inkább csak vágyálom, nem valóság.
Elég érdekes az eredmény. Noha nem tudom egyértelműen értékelni , mert egyrészt nincs idő lépték, nem tudom biztosan hol van az első léptető jel. Szóval egyes dolgok inkább csak sejthetők, mint tudhatók.
Aztán rájöttem, hogy ez már valójában nem tisztán egy léptetőmotor válasza, hanem egy mikrolépéses vezérlő-motor rendszer válasza.
Itt meg már a jó ég tudja eldönteni (pláne messziről), hogy mi származik a vezérlőtől és mi tisztán a motortól.
Azt hiszem a teljesen precíz méréshez sokkal bonyolultabb mérést kellene összeállítani, de annyit nem ér az egész.
Végül is egy pár alap dolgot úgyis tudunk a motor viselkedéséről. Másrészt olyan széles skálán mozog a tényleges üzemi állapot, hogy abban biztosan vannak nagyon szerencsétlen állapotok is. Pl. itt az 50-es fordulat látszik nagyon szerencsétlennek, de ebből sem lehet sok mindenre következtetni, mert ez egy terheletlen motor mérése.
Gondolkodásra mindenesetre jó volt a dolog.
Úgysem akar senki ilyen hobbi gépekkel mikronos pontosságot, de még a század is inkább csak vágyálom, nem valóság.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 január 22, 08:45
Írta: 000000000 Dátum 2009 január 22, 08:45
Biztos értik sokan ezeket a cifra görbéket. De ebből én nem sokat tudok értelmezni az alkalmazhatóság és a valós pontosság szempontjából.
Kérdésem:
- akkor mennyi egy léptető motor legnagyobb pontatlansága?
- függ-e ez az érték a vezérléstől?
Ugyanis az én nem enkóderes, hanem valóságos útmérésemmel 0,005 mm alatti a pontatlanság a gépemen mérőórával mérve.
Kérdésem:
- akkor mennyi egy léptető motor legnagyobb pontatlansága?
- függ-e ez az érték a vezérléstől?
Ugyanis az én nem enkóderes, hanem valóságos útmérésemmel 0,005 mm alatti a pontatlanság a gépemen mérőórával mérve.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 január 22, 08:54
Írta: 000000000 Dátum 2009 január 22, 08:54
Bocs a #1887 psychobilly-nek szól!
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2009 január 22, 22:09
Írta: 3k74cecek Dátum 2009 január 22, 22:09
Ez még egy régebbi mérés körül kialakult vitára készült mérés. Inkább elvi jelentőségű a dolog, mint gyakorlati, legalábbis hobbí szinten.
Gondolom ezt a pontosságot terheletlen állapotban mérted.
Akkor ez lehetséges, de változó (szerszám élszámtól is függően lüktető) forgácsolóerő esetén már kétlem, hogy a hobbí szinten szokásos konstrukciók tudnának ilyen pontosságot. Egyébként az elmozdulás pontossága csak egy része egy gép pontosságának.
Emellé jön a megvezetés pontossága, az erők hatására keletkező deformásciók, rezgések, stb.
Amit írtam a vágyálom századokra, azt a megmunkált munkadarabra értettem, nem egy-egy tengely mozgatási pontosságára.
Gondolom ezt a pontosságot terheletlen állapotban mérted.
Akkor ez lehetséges, de változó (szerszám élszámtól is függően lüktető) forgácsolóerő esetén már kétlem, hogy a hobbí szinten szokásos konstrukciók tudnának ilyen pontosságot. Egyébként az elmozdulás pontossága csak egy része egy gép pontosságának.
Emellé jön a megvezetés pontossága, az erők hatására keletkező deformásciók, rezgések, stb.
Amit írtam a vágyálom századokra, azt a megmunkált munkadarabra értettem, nem egy-egy tengely mozgatási pontosságára.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 január 22, 22:15
Írta: 000000000 Dátum 2009 január 22, 22:15
Egyetértek!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 január 22, 22:22
Írta: 000000000 Dátum 2009 január 22, 22:22
Na akkor viszont abban is egyet kell értenünk, hogy egy gép pontosságát alapvetően nem a meghajtó motor határozza meg (léptető vagy szervó).
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 január 29, 13:41
Írta: 000000000 Dátum 2009 január 29, 13:41
Valaki tudja esetleg a következő motoroknak mekkora lehet a nyomatékuk:
STH-54D500-07 , 6,2V/1,3A/1,8°
STH-54D500-03y - egyforma kinézetre az előzővel, meg a ráírt paramétereik is.
23LM-C004-51 6V, 1,2A, 1,8°
Köszönöm!
STH-54D500-07 , 6,2V/1,3A/1,8°
STH-54D500-03y - egyforma kinézetre az előzővel, meg a ráírt paramétereik is.
23LM-C004-51 6V, 1,2A, 1,8°
Köszönöm!
Cím: Re:Léptetőmotor
Írta: 43pbwjg8s Dátum 2009 január 29, 13:54
Írta: 43pbwjg8s Dátum 2009 január 29, 13:54
Holnap kimérünk oszcilloszkóppal egy EPSON-FX-1050-es nyomtatót. Mármint a motorok paramétereit.
Ha meglesz az anyag felteszem ha érdekel valakit. Bár ezek a motorok max nyákmarásra, vagy fúrásra jók.... De hátha.
Ha meglesz az anyag felteszem ha érdekel valakit. Bár ezek a motorok max nyákmarásra, vagy fúrásra jók.... De hátha.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 január 29, 14:16
Írta: s7manbs8 Dátum 2009 január 29, 14:16
Kisebb motorjaim vannak eladók, ha érdekel. A nick nevemre kattintva a honlapomon megtalálhatók, képekkel, miegymás. Epson nyomtatóból való is van nekem is.
Cím: Re:Léptetőmotor
Írta: 43pbwjg8s Dátum 2009 január 29, 14:44
Írta: 43pbwjg8s Dátum 2009 január 29, 14:44
Az EM-34-esből van nekem is most 4. Ha ebből is ez jön ki akkor 5.
Ha tudok mindent róla, és ugy látom, hogy találok (vagy csinálnak nekem) hozzá vezérlőt, lehet hogy kiegészítem a készletem.
Köszönöm!
Ha tudok mindent róla, és ugy látom, hogy találok (vagy csinálnak nekem) hozzá vezérlőt, lehet hogy kiegészítem a készletem.
Köszönöm!
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 január 29, 14:56
Írta: s7manbs8 Dátum 2009 január 29, 14:56
EMailt-t küldhetsz, tudok segíteni ilyen témákban.
Cím: Re:Léptetőmotor
Írta: 43pbwjg8s Dátum 2009 január 29, 16:18
Írta: 43pbwjg8s Dátum 2009 január 29, 16:18
Esetleg az adataikat is tudod?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 január 29, 16:23
Írta: s7manbs8 Dátum 2009 január 29, 16:23
Melyiknek ? Ez nekem szólt ?
Cím: Re:Léptetőmotor
Írta: 43pbwjg8s Dátum 2009 január 29, 16:51
Írta: 43pbwjg8s Dátum 2009 január 29, 16:51
Igen. :)
Ha van EPSON FX80-ból kivett EM-34-es motorod, és annak tudnád a paramétereit (feszülség, Áram) annak nagyon tudnék örülni.
Ha van EPSON FX80-ból kivett EM-34-es motorod, és annak tudnád a paramétereit (feszülség, Áram) annak nagyon tudnék örülni.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 január 29, 18:03
Írta: s7manbs8 Dátum 2009 január 29, 18:03
Az a motor olyan, mint ezek, itt összehasonlíthatod az ellenállását, és amelyik olyan, mint a táblázatokban, és unipoláris, az kb. azt tudja. De úgy kb. 0.6-0.8A-es lehet. Nyomatéka kb. 0.2Nm, feszültsége pedig U=I*R képlet szerint számolható, ha megméred az ellenállást.
Motorok adatlapjai
Motorok adatlapjai
Cím: Re:Léptetőmotor
Írta: 43pbwjg8s Dátum 2009 január 29, 18:09
Írta: 43pbwjg8s Dátum 2009 január 29, 18:09
Isten vagy elektron!!!
Azért egy kérdés:
Az ellenállás egy fázis két tekercsének az összellenállása? Vagy egy tekercs ellenállása?
Azért egy kérdés:
Az ellenállás egy fázis két tekercsének az összellenállása? Vagy egy tekercs ellenállása?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 január 29, 18:52
Írta: s7manbs8 Dátum 2009 január 29, 18:52
Az ellenállás az egyik fázis közös pontja és egyik végpontja közti ellenállás szerintem. Unipoláris meghajtásnál legalábbis, mivel ez unipoláris motor, tehát a középkivezetése és egyik vége közé kapja mindig az áramot, egy fázisnak csak az egyik része. egy időben.
Egyébként néha egy skicc, mikor kérdezel bonyolultabb dolgokat nem ártana, a Mach3 témába beírt elképzeléseidről pl.
Egyébként néha egy skicc, mikor kérdezel bonyolultabb dolgokat nem ártana, a Mach3 témába beírt elképzeléseidről pl.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 január 29, 18:55
Írta: s7manbs8 Dátum 2009 január 29, 18:55
Pont ilyen EM-34-es motorjaim hajtják a még mindig készülő SMD beültető gépemet. Itt a videó róla:
SMD gép képek és videó
SMD gép képek és videó
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 január 29, 19:18
Írta: s7manbs8 Dátum 2009 január 29, 19:18
Ez is valami hasonló, azt hiszem EPSON-ból lett kiszedve:
Léptető motor adatai : MINEBEA 17PM-H005-P2V
Léptető motor adatai : MINEBEA 17PM-H005-P2V
Cím: Re:Léptetőmotor
Írta: 43pbwjg8s Dátum 2009 január 30, 10:31
Írta: 43pbwjg8s Dátum 2009 január 30, 10:31
Köszönöm.
Akkor gyakorlatilag egy fázis egy tekercsének az ellenállásáról van szó.
A skiccel kapcsolatban igazad van. Igyekezni fogok. Tudom, hogy az én észjárásom eléggé más mint sokaknak. Mindig másfelől közelítem meg a dolgokat, így eltart egy ideig mig eljutunk a közös megértett pontra.
Ugyhogy igyekezni fogok.
Az EM-34-el kapcsolatban meg foglak keresni in private.
Akkor gyakorlatilag egy fázis egy tekercsének az ellenállásáról van szó.
A skiccel kapcsolatban igazad van. Igyekezni fogok. Tudom, hogy az én észjárásom eléggé más mint sokaknak. Mindig másfelől közelítem meg a dolgokat, így eltart egy ideig mig eljutunk a közös megértett pontra.
Ugyhogy igyekezni fogok.
Az EM-34-el kapcsolatban meg foglak keresni in private.
Cím: Re:Léptetőmotor
Írta: 43pbwjg8s Dátum 2009 január 30, 10:33
Írta: 43pbwjg8s Dátum 2009 január 30, 10:33
Gratula a géphez!
Cím: Re:Léptetőmotor
Írta: bicme92us Dátum 2009 február 02, 14:49
Írta: bicme92us Dátum 2009 február 02, 14:49
Még mindig aktuális:
Ha Valaki tud, (akar) a segítségét kérem.
Infót keresnék a következő motorról:
57SH-52A9R 22.5 ohm 0.9fok/step
9 kivezetéses, 8 különálló tekercs, egyik vég közösítve (bontásból)
Előre is köszönöm.
Ha Valaki tud, (akar) a segítségét kérem.
Infót keresnék a következő motorról:
57SH-52A9R 22.5 ohm 0.9fok/step
9 kivezetéses, 8 különálló tekercs, egyik vég közösítve (bontásból)
Előre is köszönöm.
Cím: Re:Léptetőmotor
Írta: Devecz Miklós Dátum 2009 február 02, 15:26
Írta: Devecz Miklós Dátum 2009 február 02, 15:26
Több mint valószinű ő a gyártó: link
Cím: Re:Léptetőmotor
Írta: bicme92us Dátum 2009 február 02, 17:16
Írta: bicme92us Dátum 2009 február 02, 17:16
Köszönöm! Sajnos az 57SH-58SH sorozat nincs a katalógusban.
Cím: Re:Léptetőmotor
Írta: mfrfj8vv3 Dátum 2009 február 06, 20:23
Írta: mfrfj8vv3 Dátum 2009 február 06, 20:23
Sziasztok,
Mit gondoltok, egy 2.5 amperes léptetőmotorhoz megfelel vajon egy pc egér kábele?
(ilyen van itthon és éppen hat eres, amennyi kell... csak elég vékonykák az erek benne)
Mit gondoltok, egy 2.5 amperes léptetőmotorhoz megfelel vajon egy pc egér kábele?
(ilyen van itthon és éppen hat eres, amennyi kell... csak elég vékonykák az erek benne)
Cím: Re:Léptetőmotor
Írta: ra8nsmk6w Dátum 2009 február 06, 20:29
Írta: ra8nsmk6w Dátum 2009 február 06, 20:29
Röviden! Nem. 0.75 javasolnék minimum.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 február 06, 20:30
Írta: s7manbs8 Dátum 2009 február 06, 20:30
Próba szencsere...[#vigyor2][#vigyor2][#vigyor2]
Cím: Re:Léptetőmotor
Írta: mfrfj8vv3 Dátum 2009 február 06, 21:42
Írta: mfrfj8vv3 Dátum 2009 február 06, 21:42
Köszönöm a válaszokat. Szerencsére inkább nem hagyatkoznék, inkább keresek vmi erősebbet.
Valami ötlet nem akad esetleg, olyan 6 eres drótra ami megfelel és mondjuk minden sarkon kapható (pl. telefonkábel)?
Valami ötlet nem akad esetleg, olyan 6 eres drótra ami megfelel és mondjuk minden sarkon kapható (pl. telefonkábel)?
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2009 február 06, 21:47
Írta: s5f8tmfv3 Dátum 2009 február 06, 21:47
Telefonkábelt, távközlési és számítástechnikai kábeleket szerintem hanyagolhatod, azok jelvezetékek, nem erre valók. Fogadd meg Lovas Gyula tanácsát: minimum 6x0,75 kábel (sajnos ilyen nem kapható minden sarkon). Ha minden kötél szakad akkor 2db védőfölddel ellátott (3x0,75) hálózati kábel, ilyen biztosan van otthon.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 február 06, 22:59
Írta: s7manbs8 Dátum 2009 február 06, 22:59
Én hateres riasztókábelt szoktam használni , elég olcsó is, árnyékolt kivitelű. Pár ampert elbír kényelmesen. Métere valami 50 Ft körül van.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 február 07, 00:55
Írta: 000000000 Dátum 2009 február 07, 00:55
Ennek is az a problémája, hogy a terhelhetősége méjen alatta van a kívánatosnak. A pár amper igencsak sorban áll, hogy átférjen rajta. De jelvezetéknek kiválló.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 február 07, 01:01
Írta: s7manbs8 Dátum 2009 február 07, 01:01
Nekem a maximális áramú motor, amit ezzel használok 1.4A-es Sanyo Denki echte japán léptetőmotor. Annál semmi vezetékmelegedés nem tapasztalható.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 február 07, 02:02
Írta: 000000000 Dátum 2009 február 07, 02:02
Egyrészt, az az áramfelvétel terheléstől függő, másrészt, érdekes lenne, ha a kábel morótorfelőlli vége meg a motor közzé beraknál egy ampermérőt, valamejik fázishoz. Meg az se mindegy mijen bekötéssel használod a motort. Lehet hogy a motorra 1.4A van írva de a te bekötéseddel csak 0.8A a felvétele, ami már kb. megfelel annak a kábelnek. Egyébként, ha jól emlékszem az a riasztó kábel 5-600 milli amperre van gyártva. Jaa, és a kábelhosztól is függ. Pl a 10 A biztosíték szála vékonyabb mint ez a kábel, de csak 20 milliméter hoszú.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 február 07, 02:05
Írta: 000000000 Dátum 2009 február 07, 02:05
morótorfelőlli= motorfelőlli
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2009 február 07, 07:54
Írta: Szalai György Dátum 2009 február 07, 07:54
Megint találgatás van számolgatás helyett.
Itt a tudomány. Hogy mennyi a vékony és mennyi az elég vastag.
Mert miért ne lehetne elég az egér farka, ha a távolság is egérfarknyi a motor, és a vezérlő között?
Itt a tudomány. Hogy mennyi a vékony és mennyi az elég vastag.
Mert miért ne lehetne elég az egér farka, ha a távolság is egérfarknyi a motor, és a vezérlő között?
Cím: Re:Léptetőmotor
Írta: mfrfj8vv3 Dátum 2009 február 07, 10:32
Írta: mfrfj8vv3 Dátum 2009 február 07, 10:32
Sziasztok,
Kösz a segítséget, számolgatásban nem vok erős, de a jó szóra olykor hallgatok ... [#lookaround]
Ma jártam egy villanyászboltban és éppen volt olyan, hogy 7 x 0.75-ös ... 200 forint volt egy méter, jó hajlékony amilyen kell. Az ember azt mondta utánfutókhoz szokták használni...ebből vettem pár métert.
Kösz a segítséget, számolgatásban nem vok erős, de a jó szóra olykor hallgatok ... [#lookaround]
Ma jártam egy villanyászboltban és éppen volt olyan, hogy 7 x 0.75-ös ... 200 forint volt egy méter, jó hajlékony amilyen kell. Az ember azt mondta utánfutókhoz szokták használni...ebből vettem pár métert.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 február 07, 11:30
Írta: 000000000 Dátum 2009 február 07, 11:30
Sziasztok!
Normális villanyszerelési boltokban kaphatóak ilyen kábelek. A neve: (remélem jól írom) Isli. Vezérlő kábelnek használják. Van benne egy védőföld, meg x ér számozva.
Normális villanyszerelési boltokban kaphatóak ilyen kábelek. A neve: (remélem jól írom) Isli. Vezérlő kábelnek használják. Van benne egy védőföld, meg x ér számozva.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2009 február 07, 12:32
Írta: Szalai György Dátum 2009 február 07, 12:32
YSLY-JZ helyett, az árnyékolás miatt, talán jobb választás lett volna az YSLCY-JZ.
(4. és 5. oldal) Utánfutó féklámpa és index drótnál ez nem szempont, de PWM teljesítmény szabályozott munkakábelnél az. Nem baj, ha nem zavar mindent a környezetében. Mekkora távolságra kell vezetned azt a 2,5A-t? És ez soha nem több, mint 2,5A? Vagy ez egy átlag áram, ami pillanatokra akár a többszöröse is lehet?
(4. és 5. oldal) Utánfutó féklámpa és index drótnál ez nem szempont, de PWM teljesítmény szabályozott munkakábelnél az. Nem baj, ha nem zavar mindent a környezetében. Mekkora távolságra kell vezetned azt a 2,5A-t? És ez soha nem több, mint 2,5A? Vagy ez egy átlag áram, ami pillanatokra akár a többszöröse is lehet?
Cím: Re:Léptetőmotor
Írta: mfrfj8vv3 Dátum 2009 február 07, 13:03
Írta: mfrfj8vv3 Dátum 2009 február 07, 13:03
Szervusztok !
Hát ezt jól elqrtam ! Ismét bebizonyosodott, hogy az elektronikai barkácsolás nem nekem való, ha mégoly egyszerűnek tűnik is.
Bekötöttem a 8 drótos új motoromat a hat helyes vezérlőbe (le volt írva melyik 2-2 drótot kell összekötni, azoknak a helyében biztos is voltam), de a többivel vmit elcsesztem mert a vezérlőm szépen pukkant egyet és ha jól látom egy hat lábú kis sárga alkatrész berosszt rajta.Ez a tengely azóta hulla, a többi megy. Az alkatrész jele RN1, ha jól gondolom valami kondi lehet, remélem más baja nem lett.
Így most jó nagy bajba vagyok, mert a gép meg kellene...
Sürgősen keresek valakit itt Pest környékén, aki segíteni tudna a vezérlőt újraéleszteni és egyúttal a motort is bekötné nekem!
Természetesen a kereteim között szívesen fizetek is érte.
Írjon vagy hívjon aki tud segíteni !!!
(pannon-5662235)
Hát ezt jól elqrtam ! Ismét bebizonyosodott, hogy az elektronikai barkácsolás nem nekem való, ha mégoly egyszerűnek tűnik is.
Bekötöttem a 8 drótos új motoromat a hat helyes vezérlőbe (le volt írva melyik 2-2 drótot kell összekötni, azoknak a helyében biztos is voltam), de a többivel vmit elcsesztem mert a vezérlőm szépen pukkant egyet és ha jól látom egy hat lábú kis sárga alkatrész berosszt rajta.Ez a tengely azóta hulla, a többi megy. Az alkatrész jele RN1, ha jól gondolom valami kondi lehet, remélem más baja nem lett.
Így most jó nagy bajba vagyok, mert a gép meg kellene...
Sürgősen keresek valakit itt Pest környékén, aki segíteni tudna a vezérlőt újraéleszteni és egyúttal a motort is bekötné nekem!
Természetesen a kereteim között szívesen fizetek is érte.
Írjon vagy hívjon aki tud segíteni !!!
(pannon-5662235)
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2009 február 07, 14:04
Írta: Szalai György Dátum 2009 február 07, 14:04
Felül kell bírálnom előző véleményemet.
Megmértem egy ősrégi, Sub-D9 végű,190cm hosszú egérfarok vezetőereinek az ellenállását.
Először egy eret az egyik végétől a másikig, azután két eret sorosan. (Az egyik végén öszetekerve.) Az eredmény megdöbbentő 0,8 ohm erenként. Van ebben réz egyáltalán?
A hurok ellenállása 1,6 ohm. Ezen 2,5A hatására U=I x R=2,5 x 1,6 = 4Volt feszültség és P = Inégyzet x R = 2,5 x 2,5 x 1,6 = 10Watt teljesítmény esik. Ez a léptetőmotornak nem vezeték, hanem előtét ellenállás. Talán biztosíték is egyben. 50cm hosszig még elfogadható lehet ezen a terhelésen, próba célokra, de gépre nem. Sajnos nem az egérfarok fogja csóválni a léptetőmotort.
Megmértem egy ősrégi, Sub-D9 végű,190cm hosszú egérfarok vezetőereinek az ellenállását.
Először egy eret az egyik végétől a másikig, azután két eret sorosan. (Az egyik végén öszetekerve.) Az eredmény megdöbbentő 0,8 ohm erenként. Van ebben réz egyáltalán?
A hurok ellenállása 1,6 ohm. Ezen 2,5A hatására U=I x R=2,5 x 1,6 = 4Volt feszültség és P = Inégyzet x R = 2,5 x 2,5 x 1,6 = 10Watt teljesítmény esik. Ez a léptetőmotornak nem vezeték, hanem előtét ellenállás. Talán biztosíték is egyben. 50cm hosszig még elfogadható lehet ezen a terhelésen, próba célokra, de gépre nem. Sajnos nem az egérfarok fogja csóválni a léptetőmotort.
Cím: Re:Léptetőmotor
Írta: 4um5b65d Dátum 2009 február 07, 14:29
Írta: 4um5b65d Dátum 2009 február 07, 14:29
Szerintem egy fényképezés is segíthet az adot alkatrészről (az ép tengelyhez tartozó ugyanilyenről) meg az hogy az említett szöveg az alkatrészen van rajta vagy a panelen.
De majd a nagyobb elektronika zsenik kibökik, hogy mi az. De nem kondi az biztos.
De majd a nagyobb elektronika zsenik kibökik, hogy mi az. De nem kondi az biztos.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 február 07, 15:09
Írta: s7manbs8 Dátum 2009 február 07, 15:09
A táblázat alapján 0.15 négyzetmilliméteren 1.6A a megengedett áram anélkül, hogy az a melegedésével kárt tenne a szigetelésében 25 C fokon, magyarul az én riasztókábelemnek ez semmi, mivel ez 0.22 négyzetmilliméteres, tehát 2.34A-t bír maximum a szabvány szerint. Tehát 2.5 A-es motor fázisáramokat még elbírja. Azonkívül, még ha több Ohmot is mértél a vezetéken nem sokat számít, mert PWM módban a feszültség mondjuk 40 V abból az induktivitásra esik 30-35 a többi a motor tekercsellenállására és a vezetékre. Ettől még szépen működni fog, igaz a hatásfoka csökken mondjuk 10%-ot. Ez olyan, mint valaki hangszóróra vezetéket ezüstből vesz azt is jó vastagot, mert HIFI, hiszi a pifi, hogy ettől olyan sokkal jobban szól. Mellesleg, ha kicsit melegszik a vezeték, akkor még feszöltségmentesedik is, ezáltal nem törik el olyan hamar...
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 február 07, 15:16
Írta: s7manbs8 Dátum 2009 február 07, 15:16
Egy dologra mindig vigyázni kell az elektromosságnál, hogy nagyfeszültségekkel óvatosan kell bánni, többszörös ellenőrzés után hozzáfogni. Másik fontos, hogy túlterhelést kerülni kell mindenhol, magyarán rövidzárat sehol ne csinálj lehetőleg, mert annak a következménye tönkremenetel, vagy akár tűz. Ilyen próbák esetén pedig, ha nem biztos valami inkább elé tenni sorbakötve előtétellenállást, megfelelő méretűt, nehogy rövidzár keletkezzen, és ha úgy néz ki, hogy működik, nincs melegedés, füst, lehet élesben. Főleg meg olyan áramköröknél, ahol belül drága IC-k tartózkodnak, mert még egy két diszkrét alkatrészt nem is nehéz kicserélni egy áramkörben, de ha a vezérlő proci kimegy, ami felületszerelve van, az kissé sokba fog kerülni.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2009 február 07, 15:50
Írta: Szalai György Dátum 2009 február 07, 15:50
Érdekes a megközelítésed. Ha a motorodat tisztán egyenárammal táplálnád, (PWM és a vele járó áramcsúcsok nélkül) akkor inkább egyetértenék. Szerintem a nagyon rövid idejű, nagy áramú tranziensek átvitele is fontos. Mert ez nélkül a motor (és Hifi hangszóró) nem képes kibontakoztatni a tehetségét. Tehát vagy vastag vezeték, vagy kis távolság kell. Legjobb, ha mindkettő. Persze ez alatt is van élet, de tökéletességre törekvés az nincsen. Tranziens idő pl: a H híd Fet-jében lévő védődióda kinyitásától, a motorban állandósult mágneses tér kialakulásáig eltelt idő.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 február 07, 15:58
Írta: s7manbs8 Dátum 2009 február 07, 15:58
Amit mondasz az tényleg úgy van, csak mivelhogy itt néhány méterről van szó, és csak maximum 200kHz-ről, az még olyan nagy ellenállást nem képvisel ebben az esetben, ami lényegesen lerontaná a hatásfokot, ezt akár számszerűsíteni is lehet, de felesleges. Most itt egy 20kHz-es PWM jelre gondolok, aminek, a felfutása is eleve a motor induktivitásától függ inkább semmint a néhány méter egyenes drót induktivitásától, ami ezerszer kisebb.
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2009 február 07, 16:13
Írta: s5f8tmfv3 Dátum 2009 február 07, 16:13
Azért én mégis keveslem azt az egér/riasztókábelt, igaz hogy gyakorlatilag nem ég le de próbálunk minden Nm-t kicsikarni a motorból, aztán beépítünk egy cérnavékony vezetéket aminek az ellenállása összemérhető a motoréval. Ne ezen múljon! Az egész lánc legolcsóbb része a kábel.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2009 február 07, 16:18
Írta: Szalai György Dátum 2009 február 07, 16:18
Szerintem sem csak nagy ellenállást képvisel, hanem hosszú késleltetési időt is okoz.
De általában ezt nem veszik figyelembe, pláne egy hobby gépnél.
Hétköznapi hangtechnikában sem, ha a hangszóró saját torzítása több nagyságrenddel nagyobb, mint az erősítőé. De mozgásvisszacsatolt hangrendszerben már érdekes. A léptetőmotorral elérhető, magasabb használható fordulatszám érdekében is figyelni kéne erre.
De általában ezt nem veszik figyelembe, pláne egy hobby gépnél.
Hétköznapi hangtechnikában sem, ha a hangszóró saját torzítása több nagyságrenddel nagyobb, mint az erősítőé. De mozgásvisszacsatolt hangrendszerben már érdekes. A léptetőmotorral elérhető, magasabb használható fordulatszám érdekében is figyelni kéne erre.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2009 február 07, 16:22
Írta: Szalai György Dátum 2009 február 07, 16:22
Te mit tartasz megfelelőnek, milyen elgondolás alapján, egy 2,5A-ra beállított vezérlő és a léptetőmotor közé?
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2009 február 07, 16:46
Írta: s5f8tmfv3 Dátum 2009 február 07, 16:46
Mint említettem ez a láncszem a legolcsóbb az egész rendszerben, én semmi problémát nem látok a túlméretezésében. Ha 200Ft 1m 6x0,75-ös kábel akkor nem is gondolkodnék rajta, ha van hely akár erősebbet is vennék. Ha muszály számszerűsíteni akkor azt mondanám hogy az összekötő kábel ellenállása legyen minimum egy nagyságrenddel a motor ellenállásánál kisebb. Túlzás? Érdekes hogy eddig nem nagyon foglalkoztunk ezzel a témával, pedig szinte mindent megteszünk hogy jó gyorsítást/sebességet érjünk el a motorokkal.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 február 07, 17:30
Írta: s7manbs8 Dátum 2009 február 07, 17:30
Én sem ragaszkodok, hogy minél vékonyabb legyen a vezeték, csak jobb híján az is megteszi, ha más nincs. Csak például ha az ellenállást nézzük a vörösrézé 1 m hosszú 0.1 négyzetmilliméter keresztmetszetnél 0.175 Ohm. Namármost kb. 1-2 méter kábel kewll egy kisebb gépnél. tehát 0.22 mmxmm keresztmetszetnél ez 1 méterre 0.08 Ohm. Szerintem ez éppenhogy nagyon is jó. és itt 2A esetén 2*2*0.08=0.32W veszteség.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 február 07, 17:36
Írta: s7manbs8 Dátum 2009 február 07, 17:36
Trafókba se tekernek 4-szer vastagabb anyagot, nyilvány 8-10A-es motorokhoz már ettől vastagabb kell, mondom kb. ez a 0.22 mmxmm-es riasztó kábelnek ez a max. 2-3A az pont belefér. Kiváncsi lennék, egy erőmérővel a motor tengelyén a forgatónyomatékot megmérnénk mi különbség lenne, ha egy ettől jóval vastagabb vezetéket használnánk, szerintem lehet meg se tudnánk mérni egy kézi erőmérővel a különbséget, olyan hangyányi lenne. Vagy hogy mondjak egy másik példát, ha van egy 2A-es léptetővezérlőm és 0.8A-es léptetőmotorom, nem veszek hozzá 10 A-es elektronikát, minek.
Cím: Re:Léptetőmotor
Írta: mfrfj8vv3 Dátum 2009 február 07, 18:01
Írta: mfrfj8vv3 Dátum 2009 február 07, 18:01
Sziasztok,
Átvizsgáltam jobban a panelt és megtaláltam a hibát biztosan. Sajnos nem ellenállás a hibás nem is kondi, hanem egy SLA7062M nevezetű IC... :-(( Szép nagy lyuk van rajta,csak eddig nem vettem észre.
XIII. kerületben a HQ Video nevű helyen találtam ilyet 2200 forintért, már csak be kell szerezni és ki kell cserélni...Így jártam ma.
:-(
Átvizsgáltam jobban a panelt és megtaláltam a hibát biztosan. Sajnos nem ellenállás a hibás nem is kondi, hanem egy SLA7062M nevezetű IC... :-(( Szép nagy lyuk van rajta,csak eddig nem vettem észre.
XIII. kerületben a HQ Video nevű helyen találtam ilyet 2200 forintért, már csak be kell szerezni és ki kell cserélni...Így jártam ma.
:-(
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2009 február 07, 18:09
Írta: s5f8tmfv3 Dátum 2009 február 07, 18:09
A trafó egész más ügy. Adott a hely a tekercseknek, sorozatban készül legtöbbször, költséges. Mi itt egy méter vezetékről beszélünk, egyszerűen nem érdemes a keresztmetszettel vacakolni, ne ez legyen a gyenge pont. Még soha nem mértem erőmérővel különbséget egy éppen melegedő és egy erősen túlméretezett vezetékkel bekötött motor között. Talán elhanyagolható a különbség, de elhanyagolható az árkülönbség is a vezetékek között, ezért szerintem egyszerűbb a jó vezeték. 0,8A-es motorhoz én sem vennék 10A-es elektronikát mert feleslegesen drága, de 10A-t elbíró vezetéket igen, mert akkor annak ellenállása nem befolyásol semmit. Miért ne?
Cím: Re:Léptetőmotor
Írta: mfrfj8vv3 Dátum 2009 február 07, 18:10
Írta: mfrfj8vv3 Dátum 2009 február 07, 18:10
Az előtét ellenállás jó ötlet, kár hogy nem előbb beszéltünk erről...
Ha sikerül visszavergődnöm oda ahol ma reggel tartottam, akkor majd teszek a panel elé egy 2A-s biztosítékot hogy nehogy megint baj legyen, a többi motort kikötöm (azokat tudom hogyan kell visszakötni) és úgy próbálom majd.
Az ic cserét lehet rábízom valami TV szerelőre , bár ez ( sem :-) ) nem tűnik olyan nehéznek, elég nagy lábai vannak és ritkásan állnak.
Azt is gondoltam, hogy régi ic-t levágom úgy hogy a lábai ottmaradjanak és azokhoz forrasztom hozzá az újnak a lábait... talán úgy könnyebb megcsinálni.
Ha sikerül visszavergődnöm oda ahol ma reggel tartottam, akkor majd teszek a panel elé egy 2A-s biztosítékot hogy nehogy megint baj legyen, a többi motort kikötöm (azokat tudom hogyan kell visszakötni) és úgy próbálom majd.
Az ic cserét lehet rábízom valami TV szerelőre , bár ez ( sem :-) ) nem tűnik olyan nehéznek, elég nagy lábai vannak és ritkásan állnak.
Azt is gondoltam, hogy régi ic-t levágom úgy hogy a lábai ottmaradjanak és azokhoz forrasztom hozzá az újnak a lábait... talán úgy könnyebb megcsinálni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 február 07, 18:14
Írta: 000000000 Dátum 2009 február 07, 18:14
Mivel mérted? Kézi univerzális műszerrel? Azért azt is értdemes megnézned, hogy ha a műszerzsinor két végét összefogod mit mutat?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 február 07, 18:19
Írta: s7manbs8 Dátum 2009 február 07, 18:19
Az egy jó kis mikrolépéses unipoláris IC, nem is tudtam, hogy ilyen jó áron lehet kepni, szaladok én is pestre. Csak nézd meg előtte más nem e halt meg.
Cím: Re:Léptetőmotor
Írta: mfrfj8vv3 Dátum 2009 február 07, 18:33
Írta: mfrfj8vv3 Dátum 2009 február 07, 18:33
Körbeméregettem mindent ellenállásmérővel, hozzáhasonlítottam a hibás kör alkatrészeit egy működő köréhez, nem találtam semmi eltérést...
Ha messze laksz és érdekel ilyen cucc, pár darabot szívesen megveszek neked és utánvéttel eljuthat hozzád. Hozzám sincs közel, amúgy nem járok arra sose, de most hétfőn reggel ott kezdek... kár hogy vasárnap nincsenek nyitva, csinálnám minél előbb...
Ha messze laksz és érdekel ilyen cucc, pár darabot szívesen megveszek neked és utánvéttel eljuthat hozzád. Hozzám sincs közel, amúgy nem járok arra sose, de most hétfőn reggel ott kezdek... kár hogy vasárnap nincsenek nyitva, csinálnám minél előbb...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 február 07, 18:51
Írta: 000000000 Dátum 2009 február 07, 18:51
Nagy valszeggel csak az szált el... mivel minden 1 IC-ben van!
Javaslom csipkedd ki a lábait (az IC-hez legközelebb) és csipesszel egyenként forraszt ki, majd onszippantóval tisztisd ki a lyukakat, majd mehet bele az új! Ilyenkor a nyák az érték és minden áron megmentendő!
Én erre spéci csípőfogót (IC láb-kicsípő-kézi-készüléket) használok.
Javaslom csipkedd ki a lábait (az IC-hez legközelebb) és csipesszel egyenként forraszt ki, majd onszippantóval tisztisd ki a lyukakat, majd mehet bele az új! Ilyenkor a nyák az érték és minden áron megmentendő!
Én erre spéci csípőfogót (IC láb-kicsípő-kézi-készüléket) használok.
Cím: Re:Léptetőmotor
Írta: ra8nsmk6w Dátum 2009 február 07, 19:06
Írta: ra8nsmk6w Dátum 2009 február 07, 19:06
Ha nincsenek spéci szerszámaid a kiforrasztáshoz akkor jó ötlet ha egy jó csipőfogóval elvágod az ic lábait és eggyenként már ki tudod öket szedni.Utánna elöször rögzitsd az ic-t mechanikusan majd késöbb forraszd meg a lábakat. Ezért nehéz a lábakhoz forrasztani, meg macerásabb is szerintem mert egy oldalról nem férsz hozzá
Cím: Re:Léptetőmotor
Írta: ra8nsmk6w Dátum 2009 február 07, 19:08
Írta: ra8nsmk6w Dátum 2009 február 07, 19:08
megelöztél
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2009 február 07, 19:16
Írta: Szalai György Dátum 2009 február 07, 19:16
Trafóba, ha nem kell, nem tesznek négyszer vastagabb anyagot. De a tápba jó nagy pufferkondit, azt tesznek. Hogy legyen sok tartalék energia azokban a teljesítmény csúcsokban, amikor igényli a felhasználás. Kell is, mert ha nem a csúcsokra méretezik a trafót, akkor a belső ellenállása miatt pont akkor fog leesni a tápfeszültség, amikor nem kéne neki. A kondi szolgáltatja csúcsban a kakaót, a kicsi belső ellenállásával. Ettől lehet jó nagy áramcsúcsokat kikapni a tápból. Sajnos, ha ez a lehetőség nem áll a motor rendelkezésére, akkor fuldoklik. Azután jön a rácsodálkozó tekintet, mikor az asztalon húszcentis vezetékekkel összedobott, remekül teljesítő összeállítás, a véglegesen felépített formában már nem jól produkál. Pedig csak a vezetékezést változtattuk meg. De azt nagyon.
Folyamatos forgatónyomaték mérés esetén szerintem sem lenne különbség, de kis integrálási idejű, dinamikus erő és nyomaték mérés esetén jelentős különbségeket várnék. Mint mikor a motoráramot lágyvasas ampermérővel mérem, és meg sem rebben a mutató, vagy sönt ellenálláson keresztül szkóppal vizsgálom, és látszanak a gyors változások. A tonnás lusta marógépen természetesen semmi jelentőssége, de fürge háromdés gépnél számíthat.
Hogy a konditól a motorig két méter távolságon 0,2 négyzetmilliméter vagy 2 négyzetmilliméter, az nem biztos hogy sokat befolyásol. De hogy 2 méter távolságon 0,2 négyzetmilliméter vagy 0,2 méter távolságon 2 négyzetmilliméter az már jelentős különbség. De szerintem is csak akkor számit, ha a dinamikai elvárások indokolják.
Folyamatos forgatónyomaték mérés esetén szerintem sem lenne különbség, de kis integrálási idejű, dinamikus erő és nyomaték mérés esetén jelentős különbségeket várnék. Mint mikor a motoráramot lágyvasas ampermérővel mérem, és meg sem rebben a mutató, vagy sönt ellenálláson keresztül szkóppal vizsgálom, és látszanak a gyors változások. A tonnás lusta marógépen természetesen semmi jelentőssége, de fürge háromdés gépnél számíthat.
Hogy a konditól a motorig két méter távolságon 0,2 négyzetmilliméter vagy 2 négyzetmilliméter, az nem biztos hogy sokat befolyásol. De hogy 2 méter távolságon 0,2 négyzetmilliméter vagy 0,2 méter távolságon 2 négyzetmilliméter az már jelentős különbség. De szerintem is csak akkor számit, ha a dinamikai elvárások indokolják.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2009 február 07, 19:26
Írta: Szalai György Dátum 2009 február 07, 19:26
Régi hasznos szokás, hogy ha élesztünk, elsőre kapcsolunk be valamit, akkor azt túláramvédett tápról tesszük. A hőskorban ilyen táp még nem termett minden bokorban, ezért egy alkalmasan megválasztott izzólámpát, vagy lámpacsoportot kötöttünk sorba az új készülékkel. Az izzó nem csak az áramkorlátozást látja el, hanem ampermérő is. Jól indikálja a szakadt, vagy zárlatos üzemet.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 február 07, 19:29
Írta: 000000000 Dátum 2009 február 07, 19:29
Nagy igazság! Én még ma is használok ilyesmit![#vigyor3]
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2009 február 07, 19:33
Írta: Szalai György Dátum 2009 február 07, 19:33
Ismeretlen léptetővezérlő végeinek azonosításához is jobbnak találtam az izzókat, mint a léptetőmotort.
Cím: Re:Léptetőmotor
Írta: mfrfj8vv3 Dátum 2009 február 07, 20:56
Írta: mfrfj8vv3 Dátum 2009 február 07, 20:56
Köszi a sok hasznos tanácsot, megpróbálom akkor kiszedni inkább a lábakat teljesen.
Sajnos nem vok gyakorlott ezekben a dolgokban, hát így jár az ember mikor utólag kérdez... :-(
De jobb később okosodni mint soha, remélhetőleg legközelebb már jobban fog menni.
Még egyet kérdeznék evvel az IC-vel kapcsolatban:
Csak az abszolút áramkorlát (ennél 3A) túllépésével tudom megölni, vagy annál sokkal kevesebbel is ha rossz kapcsokra kerülnek a motor vezetékei ?
Sajnos nem vok gyakorlott ezekben a dolgokban, hát így jár az ember mikor utólag kérdez... :-(
De jobb később okosodni mint soha, remélhetőleg legközelebb már jobban fog menni.
Még egyet kérdeznék evvel az IC-vel kapcsolatban:
Csak az abszolút áramkorlát (ennél 3A) túllépésével tudom megölni, vagy annál sokkal kevesebbel is ha rossz kapcsokra kerülnek a motor vezetékei ?
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2009 február 07, 21:05
Írta: PSoft Dátum 2009 február 07, 21:05
Isván,és persze a többiek is.A higanyos IC-kiforrasztásról hallottatok már?
Tudom hogy a higannyal "játszani" veszélyes dolog,de megfelelő óvintézkedésekkel és körültekintéssel kitünően működik...
Tudom hogy a higannyal "játszani" veszélyes dolog,de megfelelő óvintézkedésekkel és körültekintéssel kitünően működik...
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2009 február 07, 21:50
Írta: Szalai György Dátum 2009 február 07, 21:50
Mi a „megfelelő óvintézkedés” a forraszanyag olvadáspontja fölé hevített higannyal szemben?
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2009 február 07, 22:07
Írta: PSoft Dátum 2009 február 07, 22:07
Én annál a pár alkalomnál amikor ezt az eljárást alkalmaztam úgnevezett "porálarcot" és zárt védőszemüveget használtam.
Na és a panel egy tálcában hogy a higany még véletlenül se "mehessen" arra amerre akar!!!
Na és a panel egy tálcában hogy a higany még véletlenül se "mehessen" arra amerre akar!!!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 február 08, 09:23
Írta: 000000000 Dátum 2009 február 08, 09:23
A kifejezéssel már találkoztam, de nem ismerem az eljárást! Mi "hagyományos" forrasztást használunk.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 február 08, 09:26
Írta: 000000000 Dátum 2009 február 08, 09:26
Az, hogy pontosan mitől szálhat el egy meghajtó, sajnos összetett dolog! Lehet sime elkötésből adódott zárlat, de lehet határértéken járatott feszültség és áram miatti induktív túllövésből eredő átütés is. Akár még rossz hövezetésből adódó túlmelegedés (thermo sok), bár a korszerübb cél IC-ben erre van védelem (de nem szívesen tesztelném)...
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2009 február 08, 10:02
Írta: Szalai György Dátum 2009 február 08, 10:02
A kipukkadt SLA7062M-ról szívesen megnéznék egy szép fotót. Pláne, ha kormos is. Akár kioperált, lábatlan állapotában.
Cím: Re:Léptetőmotor
Írta: mfrfj8vv3 Dátum 2009 február 08, 11:52
Írta: mfrfj8vv3 Dátum 2009 február 08, 11:52
Sziasztok
Kiforrasztottam az ic-t, de ezt a képet még tegnap csináltam róla:
SLA7062 IC lyukas állapotban
Kiforrasztottam az ic-t, de ezt a képet még tegnap csináltam róla:
SLA7062 IC lyukas állapotban
Cím: Re:Léptetőmotor
Írta: mfrfj8vv3 Dátum 2009 február 08, 12:12
Írta: mfrfj8vv3 Dátum 2009 február 08, 12:12
Azt hiszem én kötöttem el, mert elsőre nem lett baja, csak éppen nem forgott, hanem rázkódott... aztán cseréltem, rákapcsoltam a tápot , meg se mukkant majd kb. 3-4 mp múlva kipukkant az ic.Azt gondoltam hogy nyugodtan lehet vele kísérletezni, ott a motor ellenállásnak, max nem fog forogni...
Amúgy ez egy 8 vezetékes motor,az van ráírva hogy 2.5 A/fázis. Így is állítottam be a potmétert, de tegnap megint megnéztem a motor adatlapját és most láttam benne vmi olyasmit hogy unipoláris kötésben a max áram 1.4 szeres... Ez mit jelent? Ilyenkor nem 2.5 A hanem 2.5*1.4 = 3.5 A ? Mert akkor attól is lehetett a baj, a vezérlő 3A-re van hitelesítve...
Amúgy ez egy 8 vezetékes motor,az van ráírva hogy 2.5 A/fázis. Így is állítottam be a potmétert, de tegnap megint megnéztem a motor adatlapját és most láttam benne vmi olyasmit hogy unipoláris kötésben a max áram 1.4 szeres... Ez mit jelent? Ilyenkor nem 2.5 A hanem 2.5*1.4 = 3.5 A ? Mert akkor attól is lehetett a baj, a vezérlő 3A-re van hitelesítve...
Cím: Re:Léptetőmotor
Írta: 4um5b65d Dátum 2009 február 08, 12:20
Írta: 4um5b65d Dátum 2009 február 08, 12:20
megvan a 6 lábú sárga alkatrész is....
ellenálás létra.
[#vigyor3]
ellenálás létra.
[#vigyor3]
Cím: Re:Léptetőmotor
Írta: mfrfj8vv3 Dátum 2009 február 08, 12:29
Írta: mfrfj8vv3 Dátum 2009 február 08, 12:29
Ja ja... [#vigyor5] A lábainál kicsit másmilyen a forrasztás mint a többinél, gondolom az sem szerette az áramot... Viszont az ellenállása ugyanannyi mint a többi ilyené, így gondolom ő megúszta.
Cím: Re:Léptetőmotor
Írta: motion Dátum 2009 február 08, 12:45
Írta: motion Dátum 2009 február 08, 12:45
És ahogyan nézem a kockával jelölt vége az 1-es lába. Az a közös, ahhoz kell mérni a többi lábat.
Így is stimmel az értéke?
Nehogy ez az 50Ft-os alkatrész kinyírja az új IC-t.
Így is stimmel az értéke?
Nehogy ez az 50Ft-os alkatrész kinyírja az új IC-t.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2009 február 08, 13:03
Írta: Szalai György Dátum 2009 február 08, 13:03
Nem látom az SLA7062M adatlapján, hogy volna neki hőmegfutás védelme. A blokksémáján sem látható ilyen funkcióblokk. A fénykép alapján pedig nem látom, a hűtőborda rászerelhetőségét, mert közvetlen az állított IC mögött, egy nagy fekete tömb van. (sorkapocs?) Az IC csavarfülein sem látok csavar vagy alátét nyomokat. Hűtés híján, zárlat nélkül is elérhette a kritikus hőmérsékletet. Jó volna tudni, mekkorára választotta az áramkör tervezője az Rs current-sense resistor értékét. Hogy azon a szinten működik-e a PWM áram érzékelés ahol kellene. Főleg hűtőfelület nélkül.
Cím: Re:Léptetőmotor
Írta: mfrfj8vv3 Dátum 2009 február 08, 17:59
Írta: mfrfj8vv3 Dátum 2009 február 08, 17:59
Kösz, ezt sem tudtam... méregettem mindet, hasonló értékek jöttek ki, de nem teljesen egyformák egyiknél sem... olyan 8.5 és 10 Kohm között. Gondolom ha nem szakadt és nem is teljesen zárlatos akkor jó... ?
Gyuri, ezen sosem volt hűtőborda, a dobozra szereltem egy pc ventit, azt is önszorgalomból, a doksi nem írta elő..
Sajnos egyéb információk beszerzése róla nehéz, mondhatjuk nem annyira lehetséges... :-(
Gyuri, ezen sosem volt hűtőborda, a dobozra szereltem egy pc ventit, azt is önszorgalomból, a doksi nem írta elő..
Sajnos egyéb információk beszerzése róla nehéz, mondhatjuk nem annyira lehetséges... :-(
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2009 február 08, 18:09
Írta: s5f8tmfv3 Dátum 2009 február 08, 18:09
Én bizony tennék rá hűtőbordát...
Cím: Re:Léptetőmotor
Írta: ra8nsmk6w Dátum 2009 február 08, 18:36
Írta: ra8nsmk6w Dátum 2009 február 08, 18:36
Használom ezt a vezérlöt 1,2 A -ig mindössze de hütőfelület és ventillátor is van, szerintem kell is
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 február 08, 20:08
Írta: s7manbs8 Dátum 2009 február 08, 20:08
Nekem van egy hasonló tudású szintén FET végfokkal rendelkező SLA7042 IC-s vezérlésem ami 1.4A-es léptetőmotorokat hajt, a hő ami keletkezik az IC-ben annyira kicsi, ennyinél, hogy éppen csak langyosodik. Nagyobb áramoknál már viszont legalább egy kisebbféle hűtőborda nem árt neki, vagy ventillátoros hűtés, ha az jobban tetszik.
Cím: Re:Léptetőmotor
Írta: motion Dátum 2009 február 08, 20:09
Írta: motion Dátum 2009 február 08, 20:09
Ha van rá mód forraszd ki a panelből és úgy mérd meg. Mindegyik tagnak egyforma értéknek kell lennie. A mérésed alapján 10KOhm. Ha a forrasztása elszíneződött biztosan kapott egy "lórugást". Utánanézek, és ha találok "itthon" ilyen értékűt szívesen elpostázom egy köszönömért cserébe.
Motion
Motion
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2009 február 08, 20:30
Írta: 3k74cecek Dátum 2009 február 08, 20:30
Egy ellenállás létrát általában nem lehet tönkretenni, mert felhúzásra használják.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2009 február 08, 20:36
Írta: 3k74cecek Dátum 2009 február 08, 20:36
Azon nem folyhatott akkora áram, hogy a kivezetése ettől úgy felmelegedjen, hogy a forrasztáson ennek bármi nyoma legyen.
Számolj egy kicsit, hogy 10K-ra mekkora feszt kell kapcsolni ahhoz, hogy a kivezetésén akkora áram folyjon ami már erősen melegíti azt.
Kizárt, hogy az a forrasztás ilyentől tér el a többi lábától.
Számolj egy kicsit, hogy 10K-ra mekkora feszt kell kapcsolni ahhoz, hogy a kivezetésén akkora áram folyjon ami már erősen melegíti azt.
Kizárt, hogy az a forrasztás ilyentől tér el a többi lábától.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2009 február 08, 20:37
Írta: 3k74cecek Dátum 2009 február 08, 20:37
lásd #1969-et !
Cím: Re:Léptetőmotor
Írta: ra8nsmk6w Dátum 2009 február 08, 20:43
Írta: ra8nsmk6w Dátum 2009 február 08, 20:43
Lehet, hogy a robbanó ic darabjai találták el
Cím: Re:Léptetőmotor
Írta: mfrfj8vv3 Dátum 2009 február 09, 09:59
Írta: mfrfj8vv3 Dátum 2009 február 09, 09:59
Sziasztok,
Na vettem IC-t, tényleg volt nekik szerencsére.
A lyukak tisztitásával kicsit megszenvedtem mert ónszippantóm nincsen. Vettem ilyen ónszívó zsinórt, de az nem sokat ért, a lyukba mindig jutott elég maradék. Végül egy injekciós tűvel sikerült kitisztítani. Ma este beszerelem és utána kipróbálom valami kicsire korlátozott feszel és árammal.
Ki fog derülni van e egyéb baja.
Szerintem nem lesz.(Legalábbis remélem)
Ellenben most elolvastam a vezérléssel kapcsolatos leírást a H1-nél és azt látom, hogy előfordulhat hogy a vezérlő nem is tudja az ehhez a motorhoz szükséges tartományt vezérelni.
Ami motorokat hozzá kaptam, azoknak az alapfeszültségük lényegesen magasabb mint annak amit most vettem.
Vagyis ha jól értem a leírást, ehhez a motorhoz a vezérlőnek sokkal nagyobb szabályzási tartományt kellene tudnia mint az eredeti motorok esetében, hogy az áramot mindig megfelelően korlátozni tudja... Lehet hogy nem is valók egymáshoz?
Na vettem IC-t, tényleg volt nekik szerencsére.
A lyukak tisztitásával kicsit megszenvedtem mert ónszippantóm nincsen. Vettem ilyen ónszívó zsinórt, de az nem sokat ért, a lyukba mindig jutott elég maradék. Végül egy injekciós tűvel sikerült kitisztítani. Ma este beszerelem és utána kipróbálom valami kicsire korlátozott feszel és árammal.
Ki fog derülni van e egyéb baja.
Szerintem nem lesz.(Legalábbis remélem)
Ellenben most elolvastam a vezérléssel kapcsolatos leírást a H1-nél és azt látom, hogy előfordulhat hogy a vezérlő nem is tudja az ehhez a motorhoz szükséges tartományt vezérelni.
Ami motorokat hozzá kaptam, azoknak az alapfeszültségük lényegesen magasabb mint annak amit most vettem.
Vagyis ha jól értem a leírást, ehhez a motorhoz a vezérlőnek sokkal nagyobb szabályzási tartományt kellene tudnia mint az eredeti motorok esetében, hogy az áramot mindig megfelelően korlátozni tudja... Lehet hogy nem is valók egymáshoz?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 február 09, 10:40
Írta: 000000000 Dátum 2009 február 09, 10:40
Hát előfordulhat, de bízz a jó mérnökökbe és talán elégé gyorsreagálású Choppert raktak bele (ezzel lehet, csak fokozni az átfogási tartományt). Egy R a motor körébe azért kisérletnek nem árt (azzal lehet tompítani az árammeredekségét), majd lehet később kivenni. Esetleg a tápfesszel menjél lentebb és fokozatosan emeld (és tapogasd a motort és az IC-t, mennyire melegszik)!
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2009 február 09, 11:16
Írta: Szalai György Dátum 2009 február 09, 11:16
Ónszippantó helyett! (Nekem van, mert találtam, de lusta vagyok használni.)
A lyukban lévő forraszanyagot meg szoktam melegíteni a pákával, azután gyorsan odaverem a panelt az asztal széléhez. A többit megteszi a lendület.
Hely kicsit parasztos, de én nem szégyellem.
A lyukban lévő forraszanyagot meg szoktam melegíteni a pákával, azután gyorsan odaverem a panelt az asztal széléhez. A többit megteszi a lendület.
Hely kicsit parasztos, de én nem szégyellem.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 február 09, 11:24
Írta: 000000000 Dátum 2009 február 09, 11:24
Bocsánat, a kérdésemért! A motor tekercs végeit kimérted? Mijen bekötést akarsz alkalmazni? Soros, párhuzamos, féltekercses, STB. Biztosan jól párosítottad a vezetékeket? Esetleg, küldök neked ezekről leírást. Vagy meglátogatlak ha gondolod.
Cím: Re:Léptetőmotor
Írta: ybm4ifb Dátum 2009 február 09, 11:28
Írta: ybm4ifb Dátum 2009 február 09, 11:28
Furatok tisztittása..fogpiszkáloval is jol megoldhato..persze az esztergált tipussal..
Cím: Re:Léptetőmotor
Írta: mfrfj8vv3 Dátum 2009 február 09, 19:39
Írta: mfrfj8vv3 Dátum 2009 február 09, 19:39
Sziasztok,
Na beletettem a nyákba az új ic-t. Sose csináltam még ilyet, úgy lefáradtam mint anno az első forgalmi órán a volán mögött..
Egész tűrhető lett kinézetre, bár volt pár láb amihez fölülről nem annyira fértem hozzá a sorkapocstól, azokat sokat "javítgattam" de egy idő után egyre rondább lett úgyhogy inkább hagytam őket.Majdnem kiszedtem a sorkapcsot is, de az alsó fele egész jó lett, úgyhogy végül hagytam inkább. Remélem tartani fog.
(kétoladalas a nyák, egyes lábak az alsó oldalon kapcsolódnak mások a fölsőn..)
A lényeg hogy működik ,ki is próbáltam. A tápja helyett kis 12V-os fél amperes adaptert akasztottam rá és újra rákötöttem az új motort.
Előszedtem minden elérhető papírt és úgy néz ki sikerült eltalálni a drótokat. Forog meg minden, holnap megpróbálom a 24 V-os tápról is valami védelemmel.
(Danibá, azért ha erre jársz és benéznél, szivesen látlak ! :-) )
Azonban amint kiderült a Vref-et rosszul állítottam be, mert a motoron a bipoláris mittoménmijen kapcsoláshoz adódó maximum áram van feltüntetve, az a 2.5 A. Ahogyan én kötöm, úgy csak 1.75 A -hez kellett volna állítani a Vref-t.Ez okozhatta a bajt?
Na beletettem a nyákba az új ic-t. Sose csináltam még ilyet, úgy lefáradtam mint anno az első forgalmi órán a volán mögött..
Egész tűrhető lett kinézetre, bár volt pár láb amihez fölülről nem annyira fértem hozzá a sorkapocstól, azokat sokat "javítgattam" de egy idő után egyre rondább lett úgyhogy inkább hagytam őket.Majdnem kiszedtem a sorkapcsot is, de az alsó fele egész jó lett, úgyhogy végül hagytam inkább. Remélem tartani fog.
(kétoladalas a nyák, egyes lábak az alsó oldalon kapcsolódnak mások a fölsőn..)
A lényeg hogy működik ,ki is próbáltam. A tápja helyett kis 12V-os fél amperes adaptert akasztottam rá és újra rákötöttem az új motort.
Előszedtem minden elérhető papírt és úgy néz ki sikerült eltalálni a drótokat. Forog meg minden, holnap megpróbálom a 24 V-os tápról is valami védelemmel.
(Danibá, azért ha erre jársz és benéznél, szivesen látlak ! :-) )
Azonban amint kiderült a Vref-et rosszul állítottam be, mert a motoron a bipoláris mittoménmijen kapcsoláshoz adódó maximum áram van feltüntetve, az a 2.5 A. Ahogyan én kötöm, úgy csak 1.75 A -hez kellett volna állítani a Vref-t.Ez okozhatta a bajt?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 február 09, 19:49
Írta: s7manbs8 Dátum 2009 február 09, 19:49
Ha több áramot kapott jobban melegedett is, az biztos, bár pár másodperc alatt tönkremenni még így is elég gyors. Ha az áramkör normális egyébként 3A-től többet nem szabad, hogy engedje, ha a motor tekercsét akárhogy is kötötted be, kivéve, ha rövidzár volt talán, azt nemigen védi le az áramkör. Most lassan forog is ? Mert a Fél Ameres adapter nem valami nagy teljesítmányű, bár a PWM üzemmód miatt, elég hatékonyan használja az áramkör, átlagban csak kb. annyi teljesítményt vesz fel, amennyi a motor igénye, az pedig, annyira nem sok, hogy a tesztet elbírja. Így mennyire melegszik az IC ?
Cím: Re:Léptetőmotor
Írta: mfrfj8vv3 Dátum 2009 február 09, 20:11
Írta: mfrfj8vv3 Dátum 2009 február 09, 20:11
Lassan forog jobbra balra, jónak tűnik csak lassú meg persze gyenge.
Nem sokat hagytam bekapcsolva, csak egy pecet talán, az alatt egyáltalán nem melegedett semmit. (Ja, szereztem az ic-kre ilyen öntapadós hűtőbordákat is)
Holnap majd kicsit tovább kínozom és meglátjuk mi lesz.Vigyázni fogok, mert egy ilyen kibe forrasztáshoz nem sok kedvet érzek mégegyszer. Remélem jó lesz, azt se bánom ha nem derül ki sose hogy a múltkor mit csesztem el konkrétan...
Nem sokat hagytam bekapcsolva, csak egy pecet talán, az alatt egyáltalán nem melegedett semmit. (Ja, szereztem az ic-kre ilyen öntapadós hűtőbordákat is)
Holnap majd kicsit tovább kínozom és meglátjuk mi lesz.Vigyázni fogok, mert egy ilyen kibe forrasztáshoz nem sok kedvet érzek mégegyszer. Remélem jó lesz, azt se bánom ha nem derül ki sose hogy a múltkor mit csesztem el konkrétan...
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 február 09, 22:06
Írta: s7manbs8 Dátum 2009 február 09, 22:06
Valamit a múltkor rosszul köthettél be, vagy közbe piszkáltad a panelt és rövidzárat okozhattál, ilyesmire tudok gondolni. Ahogy írod az alapján most már rendes táppal is menni kellene neki, hány volt tápot kap egyábként rendesen, annak az IC-nek 10-44 V az ajánlott tápfeszültsége, arra vigyázni kell, több ne legyen.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2009 február 09, 22:55
Írta: PSoft Dátum 2009 február 09, 22:55
Azt irod "öntapadós" hűtőborda.
Én avval óvatosan bánnék a helyedben.
Mi van ha melegszik az IC??? Hány fokig birja a ragasztó??? Ha elengedi ott a következő zárlat!!!
Én avval óvatosan bánnék a helyedben.
Mi van ha melegszik az IC??? Hány fokig birja a ragasztó??? Ha elengedi ott a következő zárlat!!!
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 február 09, 23:26
Írta: s7manbs8 Dátum 2009 február 09, 23:26
Ha nem is zárlat, hősokk. De azok az IC-k 1.7 A-t hűtés nélkül is elbírnak lehet, ha csinálsz tesztet, bekapcsolod normál táppal kis időre, majd kicsit többre, és nem kezd el gyorsan melegedni, akkor el tudod dönteni. Egyébként a gyári adatlapján a keletkező hőveszteség számolható is és pl. 25 C fokon meg van adva, mennyit bír, azt hiszem 4 W körül. Akár számolhatsz is.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 február 09, 23:28
Írta: s7manbs8 Dátum 2009 február 09, 23:28
Mármint hűtőborda vagy egyéb hűtési mód nélkül csupaszon.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 február 09, 23:56
Írta: 000000000 Dátum 2009 február 09, 23:56
Kösz a meghívást! Most nincs arra utam, csak arra gondoltam elmegyek segíteni ha kell. De látom megoldottad. Te is segítettél már nekem, önzetlenül. Meg egyébként is.
Ugy látom előbb kellett volna mennem hozzád legalább 1 hónappal. Biztosan másképp alakult volna az ügy. De, amint járok a közeledbe meglátogatlak.
Ahogy beirtam az előzőt, kikapcsoltam a gépemet, és 1 óramulva nem indult újra. Mostanra sikerült elindítanom. Közben meg idegesített, hogy hátha mennem kellene.
Cím: Re:Léptetőmotor
Írta: mfrfj8vv3 Dátum 2009 február 10, 09:36
Írta: mfrfj8vv3 Dátum 2009 február 10, 09:36
Sziasztok,
Köszi minden segítséget, ma reggel egy bátor mozdulattal bekapcsoltam a cuccot és járattam ide oda szakaszosan vagy 5 percig. Közben néztem mennyire melegszik.
Gyakorlatilag szinte semennyire, így végre sikeresen lezárult az ügy.
Amúgy 24 V-os 10 A-es az üzemi tápegység.
Köszi még 1x!
Köszi minden segítséget, ma reggel egy bátor mozdulattal bekapcsoltam a cuccot és járattam ide oda szakaszosan vagy 5 percig. Közben néztem mennyire melegszik.
Gyakorlatilag szinte semennyire, így végre sikeresen lezárult az ügy.
Amúgy 24 V-os 10 A-es az üzemi tápegység.
Köszi még 1x!
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 február 10, 11:48
Írta: s7manbs8 Dátum 2009 február 10, 11:48
Akkor csak nem mondtam hülyeségeket.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 június 14, 14:09
Írta: 000000000 Dátum 2009 június 14, 14:09
sziasztok szert tettem 3db emco cnc maró motorjaira kérdésem az lenne hogy találkozott-e már valaki ilyen motorral? a tipusa sn-072-0060-RA . életre keltettem de nem ad le nagy nyomatékot 1.5A/24V-al a motor 2A/9V ja és pörgethető a tengely ami eléggé érdekes dolog egy léptecshez képest de állítóllag ezek ilyenek.
Cím: Re:Léptetőmotor
Írta: 0gbwyh99 Dátum 2009 június 17, 19:07
Írta: 0gbwyh99 Dátum 2009 június 17, 19:07
Na most akkor az marómotor vagy egy cnc marónak a mondjuk léptecs motorjai ?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 október 07, 14:21
Írta: 000000000 Dátum 2009 október 07, 14:21
Sziasztok!
Van egy léptető motorom.
Csak annyit tudok róla, hogy 1,9 Nm...
Mekkora feszt és áramot merjek neki adni?
Köszi!
Van egy léptető motorom.
Csak annyit tudok róla, hogy 1,9 Nm...
Mekkora feszt és áramot merjek neki adni?
Köszi!
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 október 07, 16:47
Írta: s7manbs8 Dátum 2009 október 07, 16:47
A bekötése sem ismert ? 8 vezetékes ?
Mindenesetre, ha 1.9Nm a tudása, ráteszel egy erőkart, amin 10cm-re teszel 1kg-ot és annyi áramot lehet neki adni, amennyivel azt még éppen elbírja, kb.
Mindenesetre, ha 1.9Nm a tudása, ráteszel egy erőkart, amin 10cm-re teszel 1kg-ot és annyi áramot lehet neki adni, amennyivel azt még éppen elbírja, kb.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 október 07, 19:16
Írta: 000000000 Dátum 2009 október 07, 19:16
Vagy használod folyamatosan, leterhelve (sőt, még az állóhelyzet is jó lehet, csak meg legyen hajtva) és nézed, hogy mennyire melegszik. 50 Celsius körül már jó.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 október 07, 19:52
Írta: 000000000 Dátum 2009 október 07, 19:52
Ez csak 1Nm.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 október 07, 20:19
Írta: s7manbs8 Dátum 2009 október 07, 20:19
Igaz, csak az 1Nm méréséhez írtam, az 1.9-hez arányosan nagyobb súlyt, vagy erőkart kell alkalmazni. Kicsit pontosabban 0.98 kg.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2009 október 08, 09:19
Írta: keri Dátum 2009 október 08, 09:19
Kezdetnek a vezetékek vastagsága elég jól megadja hogy maximum mekkora áramra van méretezve a motor, tehát ha ezt figyelembe veszed akkor már nagy meglepetések nem érhetnek.
Ezt követően én úgy találtam ki, hogy rátettem egy labortápra folyamatos forgás mellet. Növeltem az áramot és figyeltem mennyire melegszik. Amikor stabilan meleg volt az tekintettem alap áramnak.
Kipróbáltam nagyobb áramokkal is,akkor már viszonylag gyorsan melegedett, de elég sok idő kellet még így is a kritikus hőmérséklethez.
Ha vigyázol rá hogy ne melegedjen túl akkor a dupla áramot is elbírják, csak arra kell vigyázni hogy 80fok fölé ne menjen.
Mondjuk kézzel nézve, ha meg tudod fogni de nagyon forrónak érzed az 50-60fok, tehát kézzel biztonságos termosztátként tudsz működni.
Ha van pontos hőmérőt amit szorosan rá tudsz csavarozni, az is jó, de azzal sem mernék 60foknál nagyobb hőmérséklet fölé menni. Ha eléri akkor megállítod és megvárod amíg visszahűl.
Ezt követően én úgy találtam ki, hogy rátettem egy labortápra folyamatos forgás mellet. Növeltem az áramot és figyeltem mennyire melegszik. Amikor stabilan meleg volt az tekintettem alap áramnak.
Kipróbáltam nagyobb áramokkal is,akkor már viszonylag gyorsan melegedett, de elég sok idő kellet még így is a kritikus hőmérséklethez.
Ha vigyázol rá hogy ne melegedjen túl akkor a dupla áramot is elbírják, csak arra kell vigyázni hogy 80fok fölé ne menjen.
Mondjuk kézzel nézve, ha meg tudod fogni de nagyon forrónak érzed az 50-60fok, tehát kézzel biztonságos termosztátként tudsz működni.
Ha van pontos hőmérőt amit szorosan rá tudsz csavarozni, az is jó, de azzal sem mernék 60foknál nagyobb hőmérséklet fölé menni. Ha eléri akkor megállítod és megvárod amíg visszahűl.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 október 08, 14:00
Írta: 000000000 Dátum 2009 október 08, 14:00
Köszönöm!
Mostanra sikerült kiderítenem 3A/fázis és 3,6V.
...
Egy 24V 10A-es táppal kipróbálhatom? Nem szeretném tönkretenni...
Köszi!
Mostanra sikerült kiderítenem 3A/fázis és 3,6V.
...
Egy 24V 10A-es táppal kipróbálhatom? Nem szeretném tönkretenni...
Köszi!
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 október 08, 14:26
Írta: s7manbs8 Dátum 2009 október 08, 14:26
Ki próbálni akármivel kipróbálhatod, ha az áramot lekorlátozod olyan értékre, amit a motor megenged.
Van PWM-es vezérlőd is hozzá, vagy milyen módszerrel gondoltad kipróbálni ?
Van PWM-es vezérlőd is hozzá, vagy milyen módszerrel gondoltad kipróbálni ?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 október 08, 14:32
Írta: 000000000 Dátum 2009 október 08, 14:32
Tehát 3A-nél nagyobbat nem kaphat?
Bocs a h. kérdésekért.
igen , vezérlőm van.
Bocs a h. kérdésekért.
igen , vezérlőm van.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 október 08, 14:33
Írta: 000000000 Dátum 2009 október 08, 14:33
Inkább a "Segítség, béna vagyok!!!" topikban kéne írogatnom..[#circling]
Cím: Re:Léptetőmotor
Írta: keri Dátum 2009 október 08, 17:48
Írta: keri Dátum 2009 október 08, 17:48
Igen 3A a plafon.
A vezérlő lekorlátozza a beállított értékre az áramot.
A vezérlő lekorlátozza a beállított értékre az áramot.
Cím: Re:Léptetőmotor
Írta: 43pbwjg8s Dátum 2009 október 27, 09:13
Írta: 43pbwjg8s Dátum 2009 október 27, 09:13
Cím: Re:Léptetőmotor
Írta: 4thss2k2c Dátum 2009 november 01, 11:21
Írta: 4thss2k2c Dátum 2009 november 01, 11:21
Sziasztok
Tud valaki valami infot adni nekem egy Berger Lahr vrdm 564/50 LNA típusú léptetőmotorról.Ez 10 vezetékes és hogy lehet bekötni a 6 kivezetéses vezérlőre?
Tud valaki valami infot adni nekem egy Berger Lahr vrdm 564/50 LNA típusú léptetőmotorról.Ez 10 vezetékes és hogy lehet bekötni a 6 kivezetéses vezérlőre?
Cím: Re:Léptetőmotor
Írta: x4rhew5r3 Dátum 2009 november 01, 11:46
Írta: x4rhew5r3 Dátum 2009 november 01, 11:46
Ha szerencséd van a szinekkel, akkor a tekercsek bekötése 5 fázisú deltába:
1. fehér és kék
2. piros és narancs
3. zöld és szürke
4. barna és fekete
5. lila és sárga
1. fehér és kék
2. piros és narancs
3. zöld és szürke
4. barna és fekete
5. lila és sárga
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2009 november 01, 12:01
Írta: me3ua0a6 Dátum 2009 november 01, 12:01
Egy léptetőmotor ereje mitől függ?
Melyik az erősebb/nagyobb nyomatékú? Egy 24V 0.3A, vagy egy 6V 1,2A?
Tudom kicsit bonyolultabb a dolog ennél, de mégis, lehet így összehasonlítani két motort? Pl ha a márkájuk, gyártójuk azonos...
A kérdésem teljesen elméleti. :)
Melyik az erősebb/nagyobb nyomatékú? Egy 24V 0.3A, vagy egy 6V 1,2A?
Tudom kicsit bonyolultabb a dolog ennél, de mégis, lehet így összehasonlítani két motort? Pl ha a márkájuk, gyártójuk azonos...
A kérdésem teljesen elméleti. :)
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2009 november 01, 12:16
Írta: Szalai György Dátum 2009 november 01, 12:16
Szerintem,az ötfázisú motorhoz készült vezérlő, ha hat vezetéken csatlakozik, akkor csillag kapcsolású motort kéne hogy tápláljon.
5 tekercsvég +1 a közös csillagpont.
Például ebből is okosodhatunk.
5 tekercsvég +1 a közös csillagpont.
Például ebből is okosodhatunk.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2009 november 01, 12:44
Írta: Szalai György Dátum 2009 november 01, 12:44
24V x 0,3A = 7,2VA 6V x 1,2A = 7,2VA
Tehát azonos anyagok esetén az állórészük közel egyforma mágneses teljesítményre képes.
Ha a forgórészeik mágneses ereje is egyforma, akkor tartóerő szempontjából, szerintem nincs köztük jelentős különbség.
Alacsony fordulatú felhasználás esetén ennyi elég is lenne.
Magas fordulatszám igény esetén, kezdenek előtérbe kerülni a motor váltóáramú tulajdonságai, főleg az induktivitás. Az akadályozza a mágneses mező gyors felépülését. A nagyobb feszültségű motoré nagyobb, tehát ugyan akkora fordulatszám eléréséhez annak nagyobb feszültségre van szüksége.
A vezérlők motorfeszültség szintje viszont felülről eléggé határolt. Tehát ha nincs száz volt körüli ellátásra képes vezérlő, akkor a 24V-os motor lemarad.
A motor tehát nem vizsgálható a vezérlőtől függetlenül.
Tehát azonos anyagok esetén az állórészük közel egyforma mágneses teljesítményre képes.
Ha a forgórészeik mágneses ereje is egyforma, akkor tartóerő szempontjából, szerintem nincs köztük jelentős különbség.
Alacsony fordulatú felhasználás esetén ennyi elég is lenne.
Magas fordulatszám igény esetén, kezdenek előtérbe kerülni a motor váltóáramú tulajdonságai, főleg az induktivitás. Az akadályozza a mágneses mező gyors felépülését. A nagyobb feszültségű motoré nagyobb, tehát ugyan akkora fordulatszám eléréséhez annak nagyobb feszültségre van szüksége.
A vezérlők motorfeszültség szintje viszont felülről eléggé határolt. Tehát ha nincs száz volt körüli ellátásra képes vezérlő, akkor a 24V-os motor lemarad.
A motor tehát nem vizsgálható a vezérlőtől függetlenül.
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2009 november 01, 13:15
Írta: me3ua0a6 Dátum 2009 november 01, 13:15
Egyenlőek, direkt emiatt írtam ilyen adatokat :)
Vezérlőm max 50V-ot bír! Nagyáramú tápegységem jelenleg 32V-os van csak.
Ezek szerint a 6V-os motor nagyobb fordulatot képes elérni, viszont a 24V-os motor tartónyomatéka nagyobb lesz? Esetleg a forgatónyomatéka is nagyobb lesz alacsony fordulaton, ha még képes kialakulni a teljes mágneses mező?
Vezérlőm max 50V-ot bír! Nagyáramú tápegységem jelenleg 32V-os van csak.
Ezek szerint a 6V-os motor nagyobb fordulatot képes elérni, viszont a 24V-os motor tartónyomatéka nagyobb lesz? Esetleg a forgatónyomatéka is nagyobb lesz alacsony fordulaton, ha még képes kialakulni a teljes mágneses mező?
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2009 november 01, 14:56
Írta: Szalai György Dátum 2009 november 01, 14:56
„Ezek szerint a 6V-os motor nagyobb fordulatot képes elérni,
- Tehát ha nincs száz volt körüli ellátásra képes vezérlő, akkor a 24V-os motor lemarad.”
„viszont a 24V-os motor tartónyomatéka nagyobb lesz?
- tartóerő szempontjából, szerintem nincs köztük jelentős különbség.”
- Tehát ha nincs száz volt körüli ellátásra képes vezérlő, akkor a 24V-os motor lemarad.”
„viszont a 24V-os motor tartónyomatéka nagyobb lesz?
- tartóerő szempontjából, szerintem nincs köztük jelentős különbség.”
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2009 november 01, 15:15
Írta: me3ua0a6 Dátum 2009 november 01, 15:15
Köszönöm szépen!
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 november 01, 16:39
Írta: s7manbs8 Dátum 2009 november 01, 16:39
Ha azt nézzük, hogy a tekercselés szigetelőrétege azonos vastagságú, akkor a vastagabb, kevesebb menetszámú tekercsből több befér azonos térfogatba, így az lesz a jobb ilyen szempontból is, régebben lehet a nem elégséges PWM frekvencia illetve veszteségű FET-ek megjelenése előtt csináltak inkább több menetszámú, de nagyobb induktivitású motorokat ... ?
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2009 november 01, 17:03
Írta: Szalai György Dátum 2009 november 01, 17:03
Ha meg azt nézzük, hogy vastagabb, kör keresztmetszetű vezeték menetei között több a kihasználatlan hely, akkor nem tudom.
Ehhez már kéne egy homo matematikusz.
Ehhez már kéne egy homo matematikusz.
Cím: Re:Léptetőmotor
Írta: 4thss2k2c Dátum 2009 november 01, 18:07
Írta: 4thss2k2c Dátum 2009 november 01, 18:07
Köszönöm a választ
Cím: Re:Léptetőmotor
Írta: 4thss2k2c Dátum 2009 november 01, 18:08
Írta: 4thss2k2c Dátum 2009 november 01, 18:08
Köszönöm neked is az infot
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 november 01, 20:44
Írta: s7manbs8 Dátum 2009 november 01, 20:44
Ha a vezeték azonos keresztmetszetű és profilú (kör pl.), akkor nincs több hely, arányában, pont ezért írtam. De ha teszünk a helyek közé kisebb keresztmetszetűt, akkor akkor jobban ki lehetne hasaználni, vagy pl. négyzetes profilú vezetékkel.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 november 11, 13:25
Írta: 000000000 Dátum 2009 november 11, 13:25
Szép napot mindenkinek! Sehol nem találok léptetőmotor árakat, amiket itt tudnék megrendelni! /lehet, hogy vak vagyok!/ A H2 Compactot szeretném majd megrendelni, és ahhoz a
23SM100-030-8W-XX-2.0 motorokat! /3db/ Ha jól böngésztem az oldalt, akkor ezek megfelelőek lennének a vezérlőhöz. Az árlistán sem találtam léptecs motor árakat. A válaszokat előre is köszönöm! További szép napot mondenkinek!
23SM100-030-8W-XX-2.0 motorokat! /3db/ Ha jól böngésztem az oldalt, akkor ezek megfelelőek lennének a vezérlőhöz. Az árlistán sem találtam léptecs motor árakat. A válaszokat előre is köszönöm! További szép napot mondenkinek!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 november 11, 13:33
Írta: 000000000 Dátum 2009 november 11, 13:33
Kis türelmet! Hamarosan lesz minden!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 november 13, 09:37
Írta: 000000000 Dátum 2009 november 13, 09:37
Köszönöm a gyors választ!
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 november 13, 21:48
Írta: ukcge40u Dátum 2009 november 13, 21:48
Mégiscsak a sajátomba írtam, amit ide akartam...
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 november 27, 21:32
Írta: besirkyjh Dátum 2009 november 27, 21:32
Legyen ez a léptetömotorosok leirásának a hellye .
Kezdem én .
Azért használok léptetömotort mert ezzel találkoztam az elsö CNC fotokon ( nekem olyan 2005 körül ) .
Erröl szereztem be az infokat és nem volt más hajtásrol összehasonlitási lehetöségem .
Amiért szeretem .
Kisfordulaton is van nyomatéka .
Egyszerü elektronikát csinálni vagy szerezni hozzá .
Olcsobb ( bontásbol föleg ) .
Könnyebben kézben tarthatoak a paraméterezések .
Amiért váltani kellene .
A max sebesség a szervoknál sokkal jobb és még mindig van nyomatékuk .Ezért lehetne még jobb áttételt használni ami tovább növeli a gép pontosságat stb .
Kb ennyi egyenlöre .
Kezdem én .
Azért használok léptetömotort mert ezzel találkoztam az elsö CNC fotokon ( nekem olyan 2005 körül ) .
Erröl szereztem be az infokat és nem volt más hajtásrol összehasonlitási lehetöségem .
Amiért szeretem .
Kisfordulaton is van nyomatéka .
Egyszerü elektronikát csinálni vagy szerezni hozzá .
Olcsobb ( bontásbol föleg ) .
Könnyebben kézben tarthatoak a paraméterezések .
Amiért váltani kellene .
A max sebesség a szervoknál sokkal jobb és még mindig van nyomatékuk .Ezért lehetne még jobb áttételt használni ami tovább növeli a gép pontosságat stb .
Kb ennyi egyenlöre .
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 november 27, 21:53
Írta: ukcge40u Dátum 2009 november 27, 21:53
Legyen.
Éz azért FOGOK léptecset használni, mert a nyomatékra van szükségem, egyszerűbben, olcsóbban összekalapálom, mint a szervót, és még az ilyen csekélyértelmű medvebocsok is, mint én, tudják használni.
Nem beszélve arról, hogy léptecshez szereztem be mindent az elmúlt 1 évben, tehát léptecs lesz.
Ha majd egyszer váltok...az nagyon sokba lesz nekem, tekintve az igényeimet. Ha már lúd, legyen zsíros, és kövér..., ha lépek, akkor nagyot fogok...
Éz azért FOGOK léptecset használni, mert a nyomatékra van szükségem, egyszerűbben, olcsóbban összekalapálom, mint a szervót, és még az ilyen csekélyértelmű medvebocsok is, mint én, tudják használni.
Nem beszélve arról, hogy léptecshez szereztem be mindent az elmúlt 1 évben, tehát léptecs lesz.
Ha majd egyszer váltok...az nagyon sokba lesz nekem, tekintve az igényeimet. Ha már lúd, legyen zsíros, és kövér..., ha lépek, akkor nagyot fogok...
Cím: Re:Léptetőmotor
Írta: KoLa Dátum 2009 november 27, 22:03
Írta: KoLa Dátum 2009 november 27, 22:03
Én is így gondolkozom , már most nem tudok irányt váltani szervó felé mert, túl sok pézt fektettem bele ahhoz hogy félretegyem és vegyek egy másikat amihez még annyira sem értek mint a léptetős rendszerekhez.
Kihozom ebből amit tudok hiszen sok példa van előttem a neten [#smile]
Kihozom ebből amit tudok hiszen sok példa van előttem a neten [#smile]
Cím: Re:Léptetőmotor
Írta: iezx50gsm Dátum 2009 november 27, 22:44
Írta: iezx50gsm Dátum 2009 november 27, 22:44
Nekem egy 230*200*150 mm es Hobby gépem van 1.7 Nm-es léptető motorokkal H1-es vezérlővel szerelve.Talán még a Mach3-on sem állítottam lépésvesztést nem tapasztaltam, habár tegye az igényeimet ígyis kielégíti.Szerintem nagyrészt mindenki léptetővel kezdi ,azonban kacsingat a szervó felé... A következő gépem 1000*1000*250 es lesz valószínűleg maradok a léptetőmotorok mellett melyek 6*6*4 Nm-esek lesznek szerintem a 25 mm-átmérőjű 5 mm menetemelkedésű orsóimhoz elegek lesznek
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 november 27, 22:58
Írta: besirkyjh Dátum 2009 november 27, 22:58
Még valami .
Egy léptetömotort megtudok tekercselni és egy motorvezérlésben könnyebben elboldogulok hibakeresésben .
A léptetömotoros hajtást ( én ) könnyebben tudom méretezni ( optimalizálni ) .
A motort magát könnyebben tudom cserélni hasonlo vagy ugyan olyan paraméterüre .
Könnyebb méretezni az elektronikát hozzá ( max áram - tartonyomaték .)
Egy léptetömotort megtudok tekercselni és egy motorvezérlésben könnyebben elboldogulok hibakeresésben .
A léptetömotoros hajtást ( én ) könnyebben tudom méretezni ( optimalizálni ) .
A motort magát könnyebben tudom cserélni hasonlo vagy ugyan olyan paraméterüre .
Könnyebb méretezni az elektronikát hozzá ( max áram - tartonyomaték .)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2009 november 27, 23:15
Írta: svejk Dátum 2009 november 27, 23:15
Szuper, folytassátok!!
Bár csak a szervot használók is aktiválnák magukat a homokozóban :(
Majd a végén elhesegetjük a tévhiteket...
(mert már látom hogy lesznek :)))
Bár csak a szervot használók is aktiválnák magukat a homokozóban :(
Majd a végén elhesegetjük a tévhiteket...
(mert már látom hogy lesznek :)))
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 november 27, 23:40
Írta: 000000000 Dátum 2009 november 27, 23:40
de azért nézz a lábad elé,hogy hová lépsz!:)))))[#nyes][#nyes][#nyes]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 november 27, 23:42
Írta: 000000000 Dátum 2009 november 27, 23:42
addig amig én megtudom csinálni lépteccsel,amit kigondoltam,és ugy ahogy megvagyon irva,addig maradok a konzervativizmus sötétségében!:)))
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 november 27, 23:51
Írta: besirkyjh Dátum 2009 november 27, 23:51
Semmi sötétség .
Igen is a léptetömotor életképes csak hát a piac ami nem mindig arányos a minöséggel mást probál diktálni . Lásd CD-LP harc .[#integet2]
Igen is a léptetömotor életképes csak hát a piac ami nem mindig arányos a minöséggel mást probál diktálni . Lásd CD-LP harc .[#integet2]
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 november 28, 00:01
Írta: ukcge40u Dátum 2009 november 28, 00:01
Igyekszem. :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 november 28, 07:52
Írta: 000000000 Dátum 2009 november 28, 07:52
A döntő többség léptetős rendszert használ (látom a forgalomból)! Nem véletlenül...
Mi a fontos egy hobbistának:
- olcsó legyen,
- könnyen beállítható / méretezhető legyen,
- széles skálában legyen elérhető motor, vezérlő, és szoftver választék hozzá!
Ezekkel mind rendelkezik a léptetős rendszer.
Mi a fontos egy hobbistának:
- olcsó legyen,
- könnyen beállítható / méretezhető legyen,
- széles skálában legyen elérhető motor, vezérlő, és szoftver választék hozzá!
Ezekkel mind rendelkezik a léptetős rendszer.
Cím: Re:Léptetőmotor
Írta: Rinaldo Dátum 2009 november 28, 08:54
Írta: Rinaldo Dátum 2009 november 28, 08:54
Ha lehet akkor még annyit ehez a dologhoz ,hogy aki egy kicsit is forrasztani tud... mára néhány alkatrészből a megfelelő 1db IC-vel motoronként maga is tud megbízható léptető vezérlőt készíteni 0,3-2.5..3.5 A-ig.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 november 30, 08:13
Írta: besirkyjh Dátum 2009 november 30, 08:13
Sziasztok
Léptetömtoros gépet nem használ senki??
A #2018-tol kezdve olyanok irjanak akik léptetömotoros gépet használnak .
A krdés : Miért vállasztotta ezt a hajtást ?
[#integet2]
Léptetömtoros gépet nem használ senki??
A #2018-tol kezdve olyanok irjanak akik léptetömotoros gépet használnak .
A krdés : Miért vállasztotta ezt a hajtást ?
[#integet2]
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2009 november 30, 18:35
Írta: Miki2 Dátum 2009 november 30, 18:35
Szervusz Zoli !
Nekem jelenleg 4 db léptető motoros gépem működik idehaza.
Hogy miért léptecs?
Mert egyszerű, olcsó és megbízható.
A sebessége pedig annyi, ami nekem elég.
Nekem jelenleg 4 db léptető motoros gépem működik idehaza.
Hogy miért léptecs?
Mert egyszerű, olcsó és megbízható.
A sebessége pedig annyi, ami nekem elég.
Cím: Re:Léptetőmotor
Írta: KoLa Dátum 2009 november 30, 21:37
Írta: KoLa Dátum 2009 november 30, 21:37
Sziasztok!
Én a léptetős rendszeremet az esztergán Tibor45 tanácsai szerint álítottam be - azt mondta amikor beállítom a felső határt akkor vegyem vissza 60%-ra és lesz egy stabil léptetős rendszerem, és ez egy jó módszer esztergagépnél.
Összehasonlítási alap a hagyományos esztergálás ,amit végzek a munkahelyemen - gyorsjárati sebességben legyőzöm a kézi tekerővel ,de kinek van ehhez "má" kedve?(a léptetőmotorok 12Nm-ek X tengelyen gyorsjárat 2000mm/min Z tengelyen 1600mm/min felezőáttétellel)
Időben mérve így is elvesztem a versenyt a sok mellékidő miatt ,a pontosságát és a korrekciós lehetőségek sokasága miatt nekem megfelel a léptetős rendszer!
A nagyobb probléma a vezérlésbéli finomságok megalkotása - szerintem egy esztergát sokkal nehezebb minden tekintetben, automatizálni mint egy marógépet, Mach3-al
Én a léptetős rendszeremet az esztergán Tibor45 tanácsai szerint álítottam be - azt mondta amikor beállítom a felső határt akkor vegyem vissza 60%-ra és lesz egy stabil léptetős rendszerem, és ez egy jó módszer esztergagépnél.
Összehasonlítási alap a hagyományos esztergálás ,amit végzek a munkahelyemen - gyorsjárati sebességben legyőzöm a kézi tekerővel ,de kinek van ehhez "má" kedve?(a léptetőmotorok 12Nm-ek X tengelyen gyorsjárat 2000mm/min Z tengelyen 1600mm/min felezőáttétellel)
Időben mérve így is elvesztem a versenyt a sok mellékidő miatt ,a pontosságát és a korrekciós lehetőségek sokasága miatt nekem megfelel a léptetős rendszer!
A nagyobb probléma a vezérlésbéli finomságok megalkotása - szerintem egy esztergát sokkal nehezebb minden tekintetben, automatizálni mint egy marógépet, Mach3-al
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 november 30, 21:46
Írta: s7manbs8 Dátum 2009 november 30, 21:46
Azért kell ilyen helyre ezek szerint nem 0.3Nm forgatónyomaték, szervóból sem igen a legkisebb fajta kellhetne oda. Kézi erővel meg 100-150mm erőkarral emberi erővel nem nehéz több száz W-os teljesítményt kifejteni, főleg rövidebb ideig. Még jó, hogy le tudod győzni azt a motort is. Már csak a DC szervó motor témáról is eszembe ötlött ez.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 december 01, 08:40
Írta: besirkyjh Dátum 2009 december 01, 08:40
Sziasztok
Csak egy kérdés : Használt már valaki léptetömotorhoz encodert ? A NET-en lehet látni olyan modeleket ahol léptetömotor egybe van épitve encoderrel ( nem szervo , léptetö ) .
Valakinek van ilyen tapasztalata ??
[#whatever]
Csak egy kérdés : Használt már valaki léptetömotorhoz encodert ? A NET-en lehet látni olyan modeleket ahol léptetömotor egybe van épitve encoderrel ( nem szervo , léptetö ) .
Valakinek van ilyen tapasztalata ??
[#whatever]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 08:59
Írta: 000000000 Dátum 2009 december 01, 08:59
Légyszi, linkelj már ide 1-2-őt!
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 december 01, 09:15
Írta: besirkyjh Dátum 2009 december 01, 09:15
Ebben a pillanatban találtam egy csomot .
Deltron cég : 500 encoderrel szerelve.
Deltron cég : 500 encoderrel szerelve.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 09:17
Írta: 000000000 Dátum 2009 december 01, 09:17
hajaj,mi lesz veled szervo!:)))[#nyes][#nyes]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 09:21
Írta: 000000000 Dátum 2009 december 01, 09:21
jol látod,és ehhez hozzá tenni,és elvenni sem lehet sokat!:)))én is ezért ragaszkodom(még)hozzá!:))
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 december 01, 09:22
Írta: besirkyjh Dátum 2009 december 01, 09:22

Ez egy 85 dolláros verzio .
A googli talál egy csomot :" Stepper+encoder "
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 december 01, 09:25
Írta: besirkyjh Dátum 2009 december 01, 09:25
Bocs ez lemaradt.
Rosszul irtam 195 dollár , ha jol irom .
Optical encoder for 86mm stepper motors
Optical encoder with index and 800 ppr for our 86mm stepper motors
List Price: USD $280.00
Our Price: USD $195.00
You Save: USD $85.00
[#nemtudom]
Rosszul irtam 195 dollár , ha jol irom .
Optical encoder for 86mm stepper motors
Optical encoder with index and 800 ppr for our 86mm stepper motors
List Price: USD $280.00
Our Price: USD $195.00
You Save: USD $85.00
[#nemtudom]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 09:26
Írta: 000000000 Dátum 2009 december 01, 09:26
ugylátom hogy a léptecseket csak nem akarják a sűjesztöbe tenni???!:)))
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 december 01, 09:47
Írta: besirkyjh Dátum 2009 december 01, 09:47
Nem hát .
Saját véleményem : a szervomotorok elö állitása egyszerübb és olcsobb ugyan akkor vannak elönyei a léptetövel szemben és hátrányai is , mindig a felhasználás dönti el hogy melyiket használják . Erre már probáltam utalni a CD-LP harcban ( gyártás technologia, célszerüség ) .
Persze vannak profi szervok is és vannak profi léptetök is .Azonos kategoriába nehéz hozni öket pont az elönyök és a hátrányok miatt .
Ha szerelhetö lenne ( hobby szinten ) az encoder a leglényegesebb hibáját kilehetne küszöbölni a léptecsnek .Ez a vissza csatolással kiküszöbölhetö .
Hátha valakiben fel ébredt a lehetöség és megoldja ( oldjuk ) hogy legyen egy utolag szerelhetö változata az encodernek ( itt is az elektronika lessz a lényeg ) .A hidban lessz a külömbség , nem + - kimenet hanem A B C D .
Vagy ez igy tul egyszerü ??
[#fejvakaras]
Saját véleményem : a szervomotorok elö állitása egyszerübb és olcsobb ugyan akkor vannak elönyei a léptetövel szemben és hátrányai is , mindig a felhasználás dönti el hogy melyiket használják . Erre már probáltam utalni a CD-LP harcban ( gyártás technologia, célszerüség ) .
Persze vannak profi szervok is és vannak profi léptetök is .Azonos kategoriába nehéz hozni öket pont az elönyök és a hátrányok miatt .
Ha szerelhetö lenne ( hobby szinten ) az encoder a leglényegesebb hibáját kilehetne küszöbölni a léptecsnek .Ez a vissza csatolással kiküszöbölhetö .
Hátha valakiben fel ébredt a lehetöség és megoldja ( oldjuk ) hogy legyen egy utolag szerelhetö változata az encodernek ( itt is az elektronika lessz a lényeg ) .A hidban lessz a külömbség , nem + - kimenet hanem A B C D .
Vagy ez igy tul egyszerü ??
[#fejvakaras]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 10:02
Írta: 000000000 Dátum 2009 december 01, 10:02
Vitassuk meg az encoderes léptecs "előnyét"!
Mit hoz pluszként a fenekén egy encoder? Csak a zárthurkú vezérlés "lehetőségét" látom, mert ugye a motor határadatait (nyomaték, sebesség, pozíció pontosság) nem befolyásolja.
Igen ám de mikor szokott egy léptecs impulzust veszteni? Általában abban a sebesség tartományban amikor már nincs elég nyomatéka (a max sebesség értée felett)! De pont azért veszít mert kifulladt a nyomatéktartaléka! Ilyenkor egy zárthurkú hajtásszabályzás igyekezne még nagyobb sebességet diktálni, hogy a késést behozza a rendszer, de miből, ha már eleve nincs több kraft?! Akkor meg minek is az egész?
Egy szervo motor is csak úgy képes pozícióban maradni, hogy van még nyomaték tartaléka, de a lépteccsel ellentétben a nyomaték görbélye nem olyan meredeken hanyatló!
Egy encoder semmit nem változtat a léptecs idő, nyomaték és egyéb állandóin, akkor meg minek is???
Mit hoz pluszként a fenekén egy encoder? Csak a zárthurkú vezérlés "lehetőségét" látom, mert ugye a motor határadatait (nyomaték, sebesség, pozíció pontosság) nem befolyásolja.
Igen ám de mikor szokott egy léptecs impulzust veszteni? Általában abban a sebesség tartományban amikor már nincs elég nyomatéka (a max sebesség értée felett)! De pont azért veszít mert kifulladt a nyomatéktartaléka! Ilyenkor egy zárthurkú hajtásszabályzás igyekezne még nagyobb sebességet diktálni, hogy a késést behozza a rendszer, de miből, ha már eleve nincs több kraft?! Akkor meg minek is az egész?
Egy szervo motor is csak úgy képes pozícióban maradni, hogy van még nyomaték tartaléka, de a lépteccsel ellentétben a nyomaték görbélye nem olyan meredeken hanyatló!
Egy encoder semmit nem változtat a léptecs idő, nyomaték és egyéb állandóin, akkor meg minek is???
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 december 01, 10:14
Írta: besirkyjh Dátum 2009 december 01, 10:14
Ez igy elég logikusnak hangzik .
Akkor tulajdonképpen a léptecsre nem is kell encoder hanem maradni a bevált 6-700-as motor fordulatnál és abbol gazdálkodni .A rezonanciát meg a mikrolépés megoldja .
Még jobb igy . [#eljen]
Miért tesznek mégis rá encodert ?[#fejvakaras]
Akkor tulajdonképpen a léptecsre nem is kell encoder hanem maradni a bevált 6-700-as motor fordulatnál és abbol gazdálkodni .A rezonanciát meg a mikrolépés megoldja .
Még jobb igy . [#eljen]
Miért tesznek mégis rá encodert ?[#fejvakaras]
Cím: Re:Léptetőmotor
Írta: Farkas Ádám Dátum 2009 december 01, 10:17
Írta: Farkas Ádám Dátum 2009 december 01, 10:17
Nekem vannak olyan léptető motorjaim amin van gyárilag encoder, 200-as felbontású, mint a léptető motor de sosem értettem én sem hogy minek[#nemtudom] Talán ha valami sorozatot gyártanak vele, és csavar esik a gépezetbe akkor egész nap nehogy selejtet gyártson. Ezért minden kezdetkor pozíciót ellenőriznek vele.... talán
Cím: Re:Léptetőmotor
Írta: 7vpav5d32 Dátum 2009 december 01, 10:21
Írta: 7vpav5d32 Dátum 2009 december 01, 10:21
Biztos badarság, de nem lehet, hogy ezek vezérlése nem step-es hanem mondja a vezér, hogy 40 rést balra és így tovább?
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2009 december 01, 10:23
Írta: me3ua0a6 Dátum 2009 december 01, 10:23
Vagy csak egy sima ellenőrzés a feladata...
Nem úgy kell használni, mint egy szervót, hogy mozog-e ill. hogy hol tart, hanem csak hogy megtörtént-e a mozgás Nem is muszáj visszacsatolni a PC felé, elég lehet egy külön áramkör, ami letilt, ha hibázás történt.
Nem úgy kell használni, mint egy szervót, hogy mozog-e ill. hogy hol tart, hanem csak hogy megtörtént-e a mozgás Nem is muszáj visszacsatolni a PC felé, elég lehet egy külön áramkör, ami letilt, ha hibázás történt.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 december 01, 10:29
Írta: besirkyjh Dátum 2009 december 01, 10:29
" Nem is muszáj visszacsatolni a PC felé, elég lehet egy külön áramkör, ami letilt, ha hibázás történt. "
Ennek akkor lenne értelme ha nem letiltaná hanem korrigálni a gyártást .
Ennek akkor lenne értelme ha nem letiltaná hanem korrigálni a gyártást .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 10:32
Írta: 000000000 Dátum 2009 december 01, 10:32
Még nem értem én se a "fontosságát", de valóban tele van a nett ilyen motorokkal és hozzá drága vezérlőkkel. Ott egyértelműen zárt hurkú "vezérlést" emlegetnek és a vezérlők tudnak Step/Dir és egyéb módokban is menni.
Hát ha tud valaki magyarázattal szolgálni...[#nemtudom]
Hát ha tud valaki magyarázattal szolgálni...[#nemtudom]
Cím: Re:Léptetőmotor
Írta: Farkas Ádám Dátum 2009 december 01, 10:37
Írta: Farkas Ádám Dátum 2009 december 01, 10:37
Talán ha van még egy beavatkozó szerv (mint pl:az ember) aki lépésvesztést okozhat, és ekkor a vezérlő addíg küldi a step jeleket (esetleg gyorsabbakat) amíg pozícióba nem kerül a motor.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 10:38
Írta: 000000000 Dátum 2009 december 01, 10:38
Én konkrét határ értékeket nem mondanék. Tesztelni kell a végértéket, mert ez annyi mindentől is függ, majd alámenni 20%-al és akkor van biztonsági tartalék is.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 10:40
Írta: 000000000 Dátum 2009 december 01, 10:40
De itt már megint az merül fel bennem, hogy egy léptecs csak akkor veszít lépést, ha a nyomatéka valamiért kevés, akkor meg mivel fogjuk behozni a lemaradást (és mikor..)?!
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2009 december 01, 10:42
Írta: D.Laci Dátum 2009 december 01, 10:42
Kérdezűk meg Tibort hogy minek van encoder a léptető motoron! Biztos foglalkozot már ilyesmivel.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 10:46
Írta: 000000000 Dátum 2009 december 01, 10:46
Tibor! Miért van a léptecsek fenekén encoder?
(én megkérdeztem...[#papakacsint])
(én megkérdeztem...[#papakacsint])
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2009 december 01, 10:46
Írta: Miki2 Dátum 2009 december 01, 10:46
Nem lehetne egy komparátorral egyszerűen összehasonlítani a parancs és a végrehajtás oldali impulzusok számát?
Gondolom ehhez a microstep beállítással azonos résszám kellene.
Ha nem egyezik a két érték, a hiányzó számú step jelet küldeni a motorra. Vagy egyszerűen, ahogy © Sir-Nyeteg írta, megállítani a további jelfolyamot.
Gondolom ehhez a microstep beállítással azonos résszám kellene.
Ha nem egyezik a két érték, a hiányzó számú step jelet küldeni a motorra. Vagy egyszerűen, ahogy © Sir-Nyeteg írta, megállítani a további jelfolyamot.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 10:49
Írta: 000000000 Dátum 2009 december 01, 10:49
De mindent lehet, de mi értelme?!
Mikor veszít, ha elfogyott a nyomatéka! Hogy korrigálod? Hát plusz nyomatékkal (sebességgel), na de miből, ha eleve már elfogyott!!!!!!??????
Vagy a megmunkálás után 5 percel, lassabban... akkor meg minek?! :))
Mikor veszít, ha elfogyott a nyomatéka! Hogy korrigálod? Hát plusz nyomatékkal (sebességgel), na de miből, ha eleve már elfogyott!!!!!!??????
Vagy a megmunkálás után 5 percel, lassabban... akkor meg minek?! :))
Cím: Re:Léptetőmotor
Írta: Farkas Ádám Dátum 2009 december 01, 10:52
Írta: Farkas Ádám Dátum 2009 december 01, 10:52
De mi van ha nem hajtják akkora árammal a motorokat, hogy ne melegedjenek, majd ha lemaradás van fölé mennek áramba pár pillanatig amíg kell
Cím: Re:Léptetőmotor
Írta: Farkas Ádám Dátum 2009 december 01, 10:57
Írta: Farkas Ádám Dátum 2009 december 01, 10:57
De azt akartam mondani itt van egy kép:

Itt egy léptetőmotoros géppel martam fejet, közben porszívóztam és beszorult egy pillanatra a porszívó csöve a marómotor elé, és lépést vesztett. Talán látszik a kép közepén. Onnantól kezdve végig eltolva ment a marás. Jól jött volna az utánahúzó encoderes áramkör. Ez csak egy hü..e példa volt:)
Itt egy léptetőmotoros géppel martam fejet, közben porszívóztam és beszorult egy pillanatra a porszívó csöve a marómotor elé, és lépést vesztett. Talán látszik a kép közepén. Onnantól kezdve végig eltolva ment a marás. Jól jött volna az utánahúzó encoderes áramkör. Ez csak egy hü..e példa volt:)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 11:01
Írta: 000000000 Dátum 2009 december 01, 11:01
ez logikusan hangzik,és szereintem nem a cicoma miatt van igy konstruálva!nézni kéne valahol,egy gépleirást,ami ilyen rendszerrel van megépitve,és hátha találhatnák fogodzot!:
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2009 december 01, 11:06
Írta: Szalai György Dátum 2009 december 01, 11:06
„egy léptecs csak akkor veszít lépést, ha a nyomatéka valamiért kevés, akkor meg mivel fogjuk behozni a lemaradást (és mikor..)?!”
Miért kevés a nyomatéka? Ha alul méretezett a motor a felhasználáshoz képest, akkor nincs megoldás. De ha a motorban van még tartalék, és egy rövid időre elvisel még pár nagy energiájú impulzust, (ezt megmondja az I2t motorvédelem) akkor az átsegítheti a nehézségen. Persze valaminek érzékelni kell a lemaradást (encoder, komparátor, stb.) és átkapcsolni a vezérlőt ebbe a lemaradást behozó üzemállapotba. Ha így is megmarad a lemaradás, akkor tiltani kell a vezérlőnek.
De ez nem a frankó, hanem csak az én laikus véleményem.
Miért kevés a nyomatéka? Ha alul méretezett a motor a felhasználáshoz képest, akkor nincs megoldás. De ha a motorban van még tartalék, és egy rövid időre elvisel még pár nagy energiájú impulzust, (ezt megmondja az I2t motorvédelem) akkor az átsegítheti a nehézségen. Persze valaminek érzékelni kell a lemaradást (encoder, komparátor, stb.) és átkapcsolni a vezérlőt ebbe a lemaradást behozó üzemállapotba. Ha így is megmarad a lemaradás, akkor tiltani kell a vezérlőnek.
De ez nem a frankó, hanem csak az én laikus véleményem.
Cím: Re:Léptetőmotor
Írta: Farkas Ádám Dátum 2009 december 01, 11:11
Írta: Farkas Ádám Dátum 2009 december 01, 11:11
ezt mondtam a #2057-ben én is :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 11:11
Írta: 000000000 Dátum 2009 december 01, 11:11
nem volt hűle téma,mert kűszködtem én is hasonlo problémával régebben,ami szerencsére megoldodot!:)))
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 11:13
Írta: 000000000 Dátum 2009 december 01, 11:13
Ez hazardírozás és különbem is a léptecset a névlegesén illik hajtatni, ezért találták fel a PWM-es vezérlést (így is kevés a nyomatéka, minek ezt még mesterségesen csökkenteni is, a névlegest meg bírnia kell hivatalból)!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 11:14
Írta: 000000000 Dátum 2009 december 01, 11:14
Hát ez tényleg elég szélsőséges eset! Olcsóbb megoldás: ne porszívózz közben! :)
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 december 01, 11:15
Írta: besirkyjh Dátum 2009 december 01, 11:15
Ez az én gyakorlatom .
Megszoktam keresni a maximumot és osztom 2 vel .
De ez tényleg csak szubjektiv .
[#wow3]
Megszoktam keresni a maximumot és osztom 2 vel .
De ez tényleg csak szubjektiv .
[#wow3]
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2009 december 01, 11:16
Írta: me3ua0a6 Dátum 2009 december 01, 11:16
Pár lehetőség:
-újrakezdés: homing újra, meg önteszt, stb, és hajrá onnan, ahol elrontotta, esetleg vissza pár g-kód sor...
-áramnövelés, plusz nyomaték és visszalépés
-egy léptetőmotor nem tud folytatni munkát visszalépés nélkül. Hiszen ha áramot növelünk, akkor már elvesztette előző helyzetét, így a vezérlésben is ujra fel kellene venni az előző poziciót nem koordináta, hanem tekercsáram irány kapcsán.
Csak sima tiltás/leállítás eredménye:
nem fejezed be a selejtes munkadarabot; talán nem törsz szerszámot; rájössz, hogy lépésvesztés volt, miközben nem is látnád egyébként; gépbeállításnál is jól jöhet.
Selejtes munkadarab esetén is egy plusz biztonsági lehetőség.
(Munkatársam pl nem használ végálláskapcsolókat. "Minek az, úgyse rohan ki a munkaterületről." Szoftveresen tudja a gép hogy hol van, na de hardveresen is?)
Munkahelyemen léptetőmotoros beültetőgépet használunk. kb 40-50cm átmérőjű a léptecske benne.[#bee1] Oda elképzelhetetlen egy enkóder reája.
-újrakezdés: homing újra, meg önteszt, stb, és hajrá onnan, ahol elrontotta, esetleg vissza pár g-kód sor...
-áramnövelés, plusz nyomaték és visszalépés
-egy léptetőmotor nem tud folytatni munkát visszalépés nélkül. Hiszen ha áramot növelünk, akkor már elvesztette előző helyzetét, így a vezérlésben is ujra fel kellene venni az előző poziciót nem koordináta, hanem tekercsáram irány kapcsán.
Csak sima tiltás/leállítás eredménye:
nem fejezed be a selejtes munkadarabot; talán nem törsz szerszámot; rájössz, hogy lépésvesztés volt, miközben nem is látnád egyébként; gépbeállításnál is jól jöhet.
Selejtes munkadarab esetén is egy plusz biztonsági lehetőség.
(Munkatársam pl nem használ végálláskapcsolókat. "Minek az, úgyse rohan ki a munkaterületről." Szoftveresen tudja a gép hogy hol van, na de hardveresen is?)
Munkahelyemen léptetőmotoros beültetőgépet használunk. kb 40-50cm átmérőjű a léptecske benne.[#bee1] Oda elképzelhetetlen egy enkóder reája.
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2009 december 01, 11:17
Írta: Miki2 Dátum 2009 december 01, 11:17
Ha vannak ilyen motorok, bizonyára vannak hozzá kifejlesztett vezérlők is.
Talán azok is hibajel tárolós elven működnek, mint a servo vezérlők.
Talán...
Talán azok is hibajel tárolós elven működnek, mint a servo vezérlők.
Talán...
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2009 december 01, 11:21
Írta: me3ua0a6 Dátum 2009 december 01, 11:21
Léptetőmotorom adatlapja
HY200 2220 0100 5. oldal 1A/fázis a névleges, és 1.5A-ral hajtják. Csak érdekességképpen :)
HY200 2220 0100 5. oldal 1A/fázis a névleges, és 1.5A-ral hajtják. Csak érdekességképpen :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 11:25
Írta: 000000000 Dátum 2009 december 01, 11:25
Ha a megmunkálás nem a Start-Stop nyomatéktartományba esik, akkor a megtorpanás után (lépésvesztés) Te ezt már nem indítod el (pláne nem egyből, rámpa nélkül, nagy sebességgel)!!!
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2009 december 01, 11:32
Írta: Szalai György Dátum 2009 december 01, 11:32
A visszacsatolt, szabályozott hajtásrendszerben a lépésvesztés már nem motor megállást, csak pár mikro lépésnyi lemaradást jelent. De igazad van, van mit átgondolnom a dolgon.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 december 01, 11:50
Írta: besirkyjh Dátum 2009 december 01, 11:50
Még valami , hanár olyan ritkán beszélünk a léptetökröl.
Vannak léptetömotorok neodymium mágnessel .
Ezek mennyivel jobbak a hagyományostol?
Van Magyar forgalmazo is .
Vannak léptetömotorok neodymium mágnessel .
Ezek mennyivel jobbak a hagyományostol?
Van Magyar forgalmazo is .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 12:17
Írta: 000000000 Dátum 2009 december 01, 12:17
Sajnos (?) ezeket jelenleg egyik hobbi CNC vezérlő program sem támogatja.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 12:19
Írta: 000000000 Dátum 2009 december 01, 12:19
Máshogy szerintem nem is lehet! A Step és az Encoder lépései és prellegései között muszáj tárolni, tűrni, kivárni és különbséget képezni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 12:22
Írta: 000000000 Dátum 2009 december 01, 12:22
Csúcsba vagy RMS-be? Mennyi ideig, milyen módba (nem néztem az adatlapot)?
A másik: Pont azért hanyatlik olyan drasztikusan a motor nyomatéka, mert a sebesség végén már a tápfeszt rég elértük, nincs tartalék, nincs hova "túlgerjeszteni"!
Alatta meg ha nem limitáljuk, mérjük a túlgerjesztés integrált hatását, akkor a motort le fogjuk égetni!
A másik: Pont azért hanyatlik olyan drasztikusan a motor nyomatéka, mert a sebesség végén már a tápfeszt rég elértük, nincs tartalék, nincs hova "túlgerjeszteni"!
Alatta meg ha nem limitáljuk, mérjük a túlgerjesztés integrált hatását, akkor a motort le fogjuk égetni!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 12:31
Írta: 000000000 Dátum 2009 december 01, 12:31
Neodímium? A legerősebb mágnes révén, gondolom kisebb méret mellett, nagyobb nyomaték, sebesség érhető el velük.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2009 december 01, 12:36
Írta: Szalai György Dátum 2009 december 01, 12:36
Az én Pacific Scientific Sigmax stepping motorom csak szamárium-kobalt mágneses, az gyengébb, mint a neodimium-vas-bór.
A tengelyét segédeszköz nélkül, kézi erővel nem lehet megtekergetni, akkora a tartóereje.
Milyen lehet egy neodimium-vas-bór mágneses?
Linkelj egy olyat légy szíves. Pláne ha magyar nyelvű.
A tengelyét segédeszköz nélkül, kézi erővel nem lehet megtekergetni, akkora a tartóereje.
Milyen lehet egy neodimium-vas-bór mágneses?
Linkelj egy olyat légy szíves. Pláne ha magyar nyelvű.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2009 december 01, 14:23
Írta: Szalai György Dátum 2009 december 01, 14:23
POWERMAX II P & M Hybrid Step Motors
Neodimium-vas-bór mágnesű. Van hazai forgalmazója? Ez bizony ég és föld, a hagyományoshoz képest.
Neodimium-vas-bór mágnesű. Van hazai forgalmazója? Ez bizony ég és föld, a hagyományoshoz képest.
Cím: Re:Léptetőmotor
Írta: Farkas Ádám Dátum 2009 december 01, 15:28
Írta: Farkas Ádám Dátum 2009 december 01, 15:28
Van négy ilyen motorom, kb. 20%-al jobb mint a kínai. (szerintem) Ezzel a motorral elértem a 200mm/sec sebességet!!!!
Sima TA8435H IC-vel 35V 2A. És 1Nm-es motorral. Az orsó 5mm-es emelkedésű. VIDEO
Sima TA8435H IC-vel 35V 2A. És 1Nm-es motorral. Az orsó 5mm-es emelkedésű. VIDEO
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 december 01, 16:05
Írta: s7manbs8 Dátum 2009 december 01, 16:05
Átolvasva, amiket írtatok, talán annyi haszna lehet egy ilyen encoderes léptetőnek, hogy mivel a pozícióba álláskor nem pontosan az adott szögbe áll be pl. két egész lépés közt, mondjuk egy 2000-es encoderrel felszerelve, a hibát ki tudja küszöbölni, az encoder segítségével. Pl. ha az elvi lépésszámot megkapta, onnantól ő saját magát úgy lépteti, hogy az encoder által mért pontos pozícióban álljon meg. Ezt nem nehéz megcsinálni, egy megfelelő vezérléssel persze, tehát a fő Mach programnak nem kell emiatt visszajeleznie sem.
A vezérlő azt is tudhatja mennyi a max gyorsítási lassítási rámpa és azt nem túllépve szépen beáll, ahova kell.
A vezérlő azt is tudhatja mennyi a max gyorsítási lassítási rámpa és azt nem túllépve szépen beáll, ahova kell.
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 december 01, 16:11
Írta: ukcge40u Dátum 2009 december 01, 16:11
Nagyon jó! [#taps][#eljen]
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 december 01, 16:52
Írta: s7manbs8 Dátum 2009 december 01, 16:52
Azt hiszem Kínában vannak a legnagyobb lelőhelyei a neodimiumnak. Írták is egy cikkben, hogy ki leszünk nekik szolgáltatva.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 17:15
Írta: 000000000 Dátum 2009 december 01, 17:15
ez geologiai adottságuk,és nem szerzett!:)))az iránytűt nem ök találták fel????
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2009 december 01, 17:30
Írta: Szalai György Dátum 2009 december 01, 17:30
Nekem tetszik. Van hazai forgalmazója? Mibe kerül egy ilyen?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 17:34
Írta: 000000000 Dátum 2009 december 01, 17:34
Lehet, de azért kételyeim vannak. Mire a vezérlő beszrakodja a pozícióba, már rég tovább kell lépnie (esetleg lassú sebességnél még talán)...
Cím: Re:Léptetőmotor
Írta: Farkas Ádám Dátum 2009 december 01, 17:51
Írta: Farkas Ádám Dátum 2009 december 01, 17:51
Nem tudom az enyém USA-ból van.

Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 december 01, 18:25
Írta: s7manbs8 Dátum 2009 december 01, 18:25
Leginkább lassú sebességnél tudom én is elképzelni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 18:59
Írta: 000000000 Dátum 2009 december 01, 18:59
ne kinozz bennűnket,mond ki az árat ha nem titok!:)))
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 19:01
Írta: 000000000 Dátum 2009 december 01, 19:01
az egyik moci végén,a szűrke sipka,az enkoder lenne?
Cím: Re:Léptetőmotor
Írta: Farkas Ádám Dátum 2009 december 01, 19:27
Írta: Farkas Ádám Dátum 2009 december 01, 19:27
A szürke sipkát én tettem rá, az kézi tekerő. Szóval az ára olyan 30000 körül volt a négy motor + négy acélkuplung + csatik. Valami ilyesmi helyről van:ebay
De keress rá, a vaterán is van kétféle 8-)
De keress rá, a vaterán is van kétféle 8-)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 december 01, 19:41
Írta: s7manbs8 Dátum 2009 december 01, 19:41
Nem tűnik valami soknak, főleg ha a teljesítményét is nézzük.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 19:51
Írta: 000000000 Dátum 2009 december 01, 19:51
hát nem drága cucc!:))))
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 20:03
Írta: 000000000 Dátum 2009 december 01, 20:03
huh!erigyj nézd meg!:)))mind encoderes!:)))
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 december 01, 20:07
Írta: ukcge40u Dátum 2009 december 01, 20:07
De. :)
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 december 01, 20:09
Írta: ukcge40u Dátum 2009 december 01, 20:09
Talán a jövőt látjuk most magunk előtt felcsillanni?
Úgy néz ki, megy a bolt, tehát valamilyen haszna biztosan van... ennyi hülye amerikai nincs... :)
Úgy néz ki, megy a bolt, tehát valamilyen haszna biztosan van... ennyi hülye amerikai nincs... :)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 december 01, 20:18
Írta: s7manbs8 Dátum 2009 december 01, 20:18
Az ebay nem németben van ? (vagy legalábbis ott is van egy részlegük). Hazajövet tankold már fel magad ezekkel légy oly szíves ! [#vigyor2]
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 december 01, 20:32
Írta: besirkyjh Dátum 2009 december 01, 20:32
Bocsi . Épitek karácsonyi meglepetést és csak most végeztem ( mára ) .
Itt vannak a motorok ,ismerjük öket csak másrol .
http://www.banki-sos.hu/lepteto-motor-leptetomotor-vezerlo/lepteto-motor-leptetomotor-vezerlok-2
Valahol láttam az Ádám félét is Magyar forgalmazonál , majd utánna nézek .
Itt vannak a motorok ,ismerjük öket csak másrol .
http://www.banki-sos.hu/lepteto-motor-leptetomotor-vezerlo/lepteto-motor-leptetomotor-vezerlok-2
Valahol láttam az Ádám félét is Magyar forgalmazonál , majd utánna nézek .
Cím: Re:Léptetőmotor
Írta: Farkas Ádám Dátum 2009 december 01, 20:48
Írta: Farkas Ádám Dátum 2009 december 01, 20:48
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 22:35
Írta: 000000000 Dátum 2009 december 01, 22:35
lehet láttál,csak nem ennyiért!:))))a vatera meg egy nagy otvar hely lett, miota váltás volt!:)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 22:36
Írta: 000000000 Dátum 2009 december 01, 22:36
van,magyar ebi,van oszták,van német,van angol,van,stb.mint pok a hálot ugy szötte ki magát ez az online pijac tér!:)))
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 december 01, 22:39
Írta: s7manbs8 Dátum 2009 december 01, 22:39
És melyik a legkafább, honnan érdemes venni is, ami a postaköltség, megbízhatóság szempontból is jó, meg a választék. ?
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 december 01, 22:42
Írta: ukcge40u Dátum 2009 december 01, 22:42
Itt nem érdemes nekem legalábbis, mert erre a 2 és fél hónapra én már nem regelek be... :)
A kocsi egyébként 3-4 hónapja fullra pakolva jön haza. Hordom haza az itteni háztartást... :)
A kocsi egyébként 3-4 hónapja fullra pakolva jön haza. Hordom haza az itteni háztartást... :)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 december 01, 22:45
Írta: s7manbs8 Dátum 2009 december 01, 22:45
Végkielégítésként gondolom egy utánfutóra felpakolt kimustrált léptetőmotoros 4 tengelyes géppel engednek csak utadra. :)(:
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 22:46
Írta: 000000000 Dátum 2009 december 01, 22:46
én csak az amirol vásárolok,és ott is csak kb.5 embertöl,mert nem minden arany ami fénylik!:)))elöször is m,eg kell nézned hogy hová szállit és mennyiért.van aki nem kűld europába,csak országon belűl!aztán a pofának megtekinted az adatlapját,és elolvasod a vásárloi vissza jelzéseket!:))az eby-n szigoruan veszik az ilyesmit,és nem tűrik az átbaszásokat!:))van idöszakos kitiltás,de van ami örökre szol!:)))a 100%-os eladok,már tutik!:)))sulyra megy a szállitás,és ha fineszes az elado akkor nem irja rá a kűldeményre a valos tartalmat,és a vámot meguszhatod akkor!:))de ehhez már ismeretség köll!:)))
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 december 01, 22:49
Írta: s7manbs8 Dátum 2009 december 01, 22:49
Hasznos tapasztalatok. :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 01, 23:00
Írta: 000000000 Dátum 2009 december 01, 23:00
az,és a bejáratott dolgok jol működnek,és ha uj portékát tesz fel az "ismerös,akkor jolesik ha elötte meg keres egy emillel!:)))
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 december 01, 23:07
Írta: ukcge40u Dátum 2009 december 01, 23:07
Hagyjad már, itt sem kolbászból van a kerítés. (hanem rozsdamentesből...)
Bár, a főnökömmel pénteken beittunk a cégnél meló után, amilyen bolond, még képes elhozni egy esztergát, meg egy marógépet, ha tudok adni itt a gépeknek helyet. Azt mondta, majd dolgozik nekem, legyek én a főnök, harcoljak én az ügyfelekkel. Ő meg szépen elmelózgat itten.
Ha csak a fele is bejönne...
Isten bizony, a VMX42-esnek építenék egy külön műhelyt, kerüljön szinte bármibe...
Na, már megint bilibe lóg a kezem, asszem behozok még egy üvegcsét...
Bár, a főnökömmel pénteken beittunk a cégnél meló után, amilyen bolond, még képes elhozni egy esztergát, meg egy marógépet, ha tudok adni itt a gépeknek helyet. Azt mondta, majd dolgozik nekem, legyek én a főnök, harcoljak én az ügyfelekkel. Ő meg szépen elmelózgat itten.
Ha csak a fele is bejönne...
Isten bizony, a VMX42-esnek építenék egy külön műhelyt, kerüljön szinte bármibe...
Na, már megint bilibe lóg a kezem, asszem behozok még egy üvegcsét...
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 december 01, 23:20
Írta: s7manbs8 Dátum 2009 december 01, 23:20
Addig üsd a vasat amíg lehet ! :)
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 december 01, 23:27
Írta: ukcge40u Dátum 2009 december 01, 23:27
Már csak pakolok, a kulcsom is visszaadtam már.
Lelkileg már felkészültem, most jönnek a cuccok... :)
Lelkileg már felkészültem, most jönnek a cuccok... :)
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 december 14, 21:12
Írta: ukcge40u Dátum 2009 december 14, 21:12
Kérdés.
Ugye lett nekem most 4db léptetőmotorom.
Annak az alapfeszültsége 7V tekercsenként.
Amit tudok, hogy minél kisebb a tekercsenkénti feszültség, annál jobban lehet "szorozni" a tápfeszültséget.
Ennek a léptecsnek maximum mekkora feszültséget érdemes adni maximum?
Ugye lett nekem most 4db léptetőmotorom.
Annak az alapfeszültsége 7V tekercsenként.
Amit tudok, hogy minél kisebb a tekercsenkénti feszültség, annál jobban lehet "szorozni" a tápfeszültséget.
Ennek a léptecsnek maximum mekkora feszültséget érdemes adni maximum?
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2009 december 14, 21:17
Írta: jv7pu3a5p Dátum 2009 december 14, 21:17
Induktivitás, áram?
saját tapsztalatomból azt tudom mondani, hogy minél többet. természetesen ésszel. Az elektronika úgyis szabályoz amennyi kell, de ha nincs elég fesz akkor nagyobb fordulaton nem lesz erő. Nekem is van egy 5.6Vos mocim, nagy tekercsellenálással és bizony 40Vról akart rendesen dolgozni csak. Ki kell tapasztald. Milyen vezérlővel fogod hajtani?
saját tapsztalatomból azt tudom mondani, hogy minél többet. természetesen ésszel. Az elektronika úgyis szabályoz amennyi kell, de ha nincs elég fesz akkor nagyobb fordulaton nem lesz erő. Nekem is van egy 5.6Vos mocim, nagy tekercsellenálással és bizony 40Vról akart rendesen dolgozni csak. Ki kell tapasztald. Milyen vezérlővel fogod hajtani?
Cím: Re:Léptetőmotor
Írta: Révész Richárd Dátum 2009 december 14, 21:19
Írta: Révész Richárd Dátum 2009 december 14, 21:19
Kb 4-5-tel lehet szorozni a többi meg kiderül ha meghajtod.
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 december 14, 21:20
Írta: ukcge40u Dátum 2009 december 14, 21:20
Ezek a kisgépre mennének, annak a vezérlője H2PCB lesz, az nem tud 35V-nál többet.
Vagy esztergára,attól függ, mit sikerül még gyűjetni. :)
Vagy esztergára,attól függ, mit sikerül még gyűjetni. :)
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 december 14, 21:21
Írta: ukcge40u Dátum 2009 december 14, 21:21
Köszi.
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 december 14, 21:22
Írta: ukcge40u Dátum 2009 december 14, 21:22
Valahol az adok-veszekben volt róla a kép, már nem emlékszem induktivitásra, áramra... De a jövő héten már kézbeveszem őket. :)
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2009 december 14, 21:28
Írta: jv7pu3a5p Dátum 2009 december 14, 21:28
Akkor ennyi, meg is van a válasz ha nem tud 35Vnál többet. Én a helyedben 24V AC egyenirányítva az 33V. És akkor a vezérlő majd kihozza belőle amit lehet. Majd írd már meg a tapasztalataidat, vele. Kiváncsi vagyok.
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 december 14, 21:34
Írta: ukcge40u Dátum 2009 december 14, 21:34
Van is egy fickós (biztosan az, mert nehéz) töbkivezetéses 18/24V trafóm, majd azzal megtekerjük.
A másik vezérlőm viszont mehet 90V-ig is, de azt gondolom, hogy azt talán mégse lenne jó ötlet ráengedni... :)
A másik vezérlőm viszont mehet 90V-ig is, de azt gondolom, hogy azt talán mégse lenne jó ötlet ráengedni... :)
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2009 december 14, 22:37
Írta: jv7pu3a5p Dátum 2009 december 14, 22:37
A léptecs tartónyomatéka ismert. Tud valamekkora nyomatékot X áramnál. Ha elkezded pörgetni és nem szabályzol áramot mondjuk, akkor az áram az árammérődön folyamatosan csökkeni fog. Ez abból adódik, hogy induktív a motor és minél rövidebb ideig van rajta egy tekercsen a kakaó annál nagyobb lesz az ellenállása (XL), nő a frekvencia. Ezért kell a nagy feszültség amúgy, hogy tudjon felpörögni nagyobb fordulatokra is és legyen ereje is. A vezérlő meg PWMmel szépen beszabályozza a beállított áramot.
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 december 14, 22:41
Írta: ukcge40u Dátum 2009 december 14, 22:41
Így már logikus, és meglepő, de értem is.
Csak így még nem írta le nekem senki. :)
Így már tiszta.
Csak így még nem írta le nekem senki. :)
Így már tiszta.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 december 14, 22:43
Írta: s7manbs8 Dátum 2009 december 14, 22:43
Csak azért nem érthető sokszor egy dolog, mert valamit nem vet figyelembe az ember. Itt pl. az induktivitás létezése.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2009 december 14, 22:44
Írta: jv7pu3a5p Dátum 2009 december 14, 22:44
[#wink]
Én meg ha végre beindul a forgácsolás is a gépen, biztos foglak keresni kérdésekkel. :)
Én meg ha végre beindul a forgácsolás is a gépen, biztos foglak keresni kérdésekkel. :)
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2009 december 14, 22:49
Írta: jv7pu3a5p Dátum 2009 december 14, 22:49
Ne is mond, itt van nekem egy 3.1Nm motor és baromi nagy az induktivitása. 33Vról még a 600as fordulat is nyögve nyelős, főleg ezért kell upgradelnem 50V-ra.
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 december 14, 22:49
Írta: ukcge40u Dátum 2009 december 14, 22:49
Úgy legyen.
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 december 14, 22:52
Írta: ukcge40u Dátum 2009 december 14, 22:52
Hát ja.
Ez is az én bajom ezekkel a villanyos dolgokkal, hogy szépen kijön egy eredmény, de jön még egy tényező és onnantól már a rossz is keserű tud lenni...
A mechanikában ugyanígy van (soktényezős buli), de azok megfogható dolgok, és én vizuális típus vagyok, tehát el tudom képzelni az induktivitást is képben, de a főforgácsolóerőt jobban... :)
Ez is az én bajom ezekkel a villanyos dolgokkal, hogy szépen kijön egy eredmény, de jön még egy tényező és onnantól már a rossz is keserű tud lenni...
A mechanikában ugyanígy van (soktényezős buli), de azok megfogható dolgok, és én vizuális típus vagyok, tehát el tudom képzelni az induktivitást is képben, de a főforgácsolóerőt jobban... :)
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 december 14, 22:54
Írta: ukcge40u Dátum 2009 december 14, 22:54
Ennek ellenére úgy érzem, hogy kezdem nem csak látni, hanem érteni is az induktivitást.
Vagy azért látom, mert értem, csak még nem tudatosult?
(Hol egy kád? Keresek egy kis heuRékát...
Vagy azért látom, mert értem, csak még nem tudatosult?
(Hol egy kád? Keresek egy kis heuRékát...
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 december 14, 23:08
Írta: besirkyjh Dátum 2009 december 14, 23:08
Szia Sanzi
Bal oldalt a menüben találsz egy "H1 motor tuning" leirást abban Isván leirja hogy mire kell figyelni és mit lehet alkalmazni .
Támpontnak tökéletes .
[#nezze][#eljen]
Bal oldalt a menüben találsz egy "H1 motor tuning" leirást abban Isván leirja hogy mire kell figyelni és mit lehet alkalmazni .
Támpontnak tökéletes .
[#nezze][#eljen]
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 december 14, 23:09
Írta: s7manbs8 Dátum 2009 december 14, 23:09
Úgy fog menni 800-850-nel kb.
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 december 14, 23:10
Írta: ukcge40u Dátum 2009 december 14, 23:10
Szia Zoli bátyó!
Igen, azon már átrágtam magam, és érteni is vélem. Ennyi lenne az egész?
Vagy van még valami, amit nem tudok?
Igen, azon már átrágtam magam, és érteni is vélem. Ennyi lenne az egész?
Vagy van még valami, amit nem tudok?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 december 14, 23:11
Írta: s7manbs8 Dátum 2009 december 14, 23:11
Vannak ilyen analógiák, hogy a töltés pl. egy kád víz, a feszültség egy rugó, vagy ilyesmik.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 december 14, 23:14
Írta: s7manbs8 Dátum 2009 december 14, 23:14
Akkor már csak a kvantummechanikát kell tanulmányozni és amit eddig érteni véltél el is felejtheted. [#circling][#circling]
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 december 14, 23:17
Írta: besirkyjh Dátum 2009 december 14, 23:17
Szerintem ugyan az a motorom van nekem is és hasonlo gondok voltak vele .Most MSD-70-es van rajta . Még arra jöttem rá hogy PC nélkül a felfutási idö hiánya szintén gondot jelent ha lehet nagyobbat mint a tápfesz ( tuning) hiánya .
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 december 14, 23:19
Írta: ukcge40u Dátum 2009 december 14, 23:19
Azokat tudom. Már régen. :)
Nemáá, hogy tudom miről van szó, csak bonyisabbnak hiszem,és azért nem vélem érteni????
Akkor a tranyó egy kapu, és a emiterrel nyitom ki? És a nyitófeszültség az arra megy, amerre nyitottam? Az hova lesz?
Nemáá, hogy tudom miről van szó, csak bonyisabbnak hiszem,és azért nem vélem érteni????
Akkor a tranyó egy kapu, és a emiterrel nyitom ki? És a nyitófeszültség az arra megy, amerre nyitottam? Az hova lesz?
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2009 december 14, 23:26
Írta: jv7pu3a5p Dátum 2009 december 14, 23:26
23SH086 a típusa. T2től vettem a talin.
75Vról is hajtod amúgy?
75Vról is hajtod amúgy?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 december 14, 23:34
Írta: s7manbs8 Dátum 2009 december 14, 23:34
A bázis a kapu kulcsa, ezt elfordítod az emitter fele és kinyílik a kapu.
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 december 14, 23:36
Írta: ukcge40u Dátum 2009 december 14, 23:36
Akkor ezt összekevertem. :)
Mindegy, a nevek nem számítanak, lehetne A B C is akár, a működés a lényeg.
Hova lesz a bázison bejutó kapcsolófeszültség?
Mindegy, a nevek nem számítanak, lehetne A B C is akár, a működés a lényeg.
Hova lesz a bázison bejutó kapcsolófeszültség?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 december 14, 23:39
Írta: besirkyjh Dátum 2009 december 14, 23:39
300W toroid 15 000mikro 80V és a szekunder 50V válto de 3 motor terhelénél sem esik 49 alá .
Egyébként azt vettem észre hogy 60V egyen felett nem nagyon van hatása a motor sebességére . Igen onnan (T2)
Egyébként azt vettem észre hogy 60V egyen felett nem nagyon van hatása a motor sebességére . Igen onnan (T2)
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2009 december 14, 23:44
Írta: jv7pu3a5p Dátum 2009 december 14, 23:44
Az szép. Igen, minden motornak van egy fizikai korláta, ott már nem javít a tápfesz. Milyen max sebességet sikerült elérned ezen a mocin terheletlenül? És milyen sebességen használod a gépen max?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 december 14, 23:47
Írta: s7manbs8 Dátum 2009 december 14, 23:47
Vagy képzelj el egy csövet, aminek keresztbe betolunk egy nyelvet, ami elzárja az útját, és amennyire betoljuk, annál kevesebb vagy több víz áramlik át, a nyomás felőli részén, mint egy vízcsap is lehetne. A nyomás felőli a collector, a másik cső vége az emitter, a nyelve meg a bázis.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 december 14, 23:49
Írta: s7manbs8 Dátum 2009 december 14, 23:49
Nem azért mert a vas átmágnesezés egyre több energiát elvesz ?
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 december 14, 23:52
Írta: ukcge40u Dátum 2009 december 14, 23:52
A tranyón már túl vagyok, azt vágom.
Most az induktív ellenállás van soron.
Minek kell, meg mire jó, meg azt már kapisgálom, hogy hogy működik.
Illetve induktivitás, mint tekercs, vagy tekercs, mint induktivitás?
Most az induktív ellenállás van soron.
Minek kell, meg mire jó, meg azt már kapisgálom, hogy hogy működik.
Illetve induktivitás, mint tekercs, vagy tekercs, mint induktivitás?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 december 15, 00:00
Írta: s7manbs8 Dátum 2009 december 15, 00:00
Pl. léptetőmotornál egyrészt kell tekercs, másrészt meg az hátrány is, mert minél több a menet annál erősebb, azonos áram esetén, de ha már váltani kell a tekercseken az áramot előjön az induktivitási érték, ami minél nagyobb, annál lassabban akar megszünni az áram a tekercsben és kialakulni is.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2009 december 15, 00:00
Írta: jv7pu3a5p Dátum 2009 december 15, 00:00
Egy kis segítség:
Xl = 2 * pi * f * L
Ahol az f a frekvencia L a tekercs induktivitása. Állandó induktivitásnál, a frekvencia növekedésével nő a reaktancia (ellenállás). Ha nő az ellenállás akkor pedig adott feszültségnél csökken az Áram. I = U / R.
Xl = 2 * pi * f * L
Ahol az f a frekvencia L a tekercs induktivitása. Állandó induktivitásnál, a frekvencia növekedésével nő a reaktancia (ellenállás). Ha nő az ellenállás akkor pedig adott feszültségnél csökken az Áram. I = U / R.
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 december 15, 00:12
Írta: ukcge40u Dátum 2009 december 15, 00:12
Na, innentől kínai.
Inkább a tehetetlenséggel hozom párhuzamba.
Vagyis, ha a tekercsszámom a gyorsulásom, akkor minél több van belőle, annál gyorsabb leszek.
De, ha meg kell fordulni, akkor sokkal tovább tart lassítanom arról a sebességről adott idő alatt. Ha viszont a lassítási időszakom alatt engem picsán rúgnak előre megint, akkor nem tudtam lelassulni, és megfordulni, és ezzel esetleg másik irányú gerjesztést létrehozni, ha én vagyok egy 1db elektron.
Magyarán, ha nagy az induktivitásom, akkor nem vagyok olyan rugalmas, magyarán oda van az áramköröm dinamikája.
A hogyan számoljuk ki, meg a képletek majd a következő életemben jönnek. :)
Egyébként jól logikáztam?
Inkább a tehetetlenséggel hozom párhuzamba.
Vagyis, ha a tekercsszámom a gyorsulásom, akkor minél több van belőle, annál gyorsabb leszek.
De, ha meg kell fordulni, akkor sokkal tovább tart lassítanom arról a sebességről adott idő alatt. Ha viszont a lassítási időszakom alatt engem picsán rúgnak előre megint, akkor nem tudtam lelassulni, és megfordulni, és ezzel esetleg másik irányú gerjesztést létrehozni, ha én vagyok egy 1db elektron.
Magyarán, ha nagy az induktivitásom, akkor nem vagyok olyan rugalmas, magyarán oda van az áramköröm dinamikája.
A hogyan számoljuk ki, meg a képletek majd a következő életemben jönnek. :)
Egyébként jól logikáztam?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2009 december 15, 00:16
Írta: s7manbs8 Dátum 2009 december 15, 00:16
Ilyesmi a logika, minél nagyobb, annál nehezebben tudsz váltani irányt vagy sebességet is.
Cím: Re:Léptetőmotor
Írta: ukcge40u Dátum 2009 december 15, 00:17
Írta: ukcge40u Dátum 2009 december 15, 00:17
Gyerünk a bénázósba, mert szétrúgják a seggünket...
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 december 15, 09:45
Írta: besirkyjh Dátum 2009 december 15, 09:45
Szia
A motor sebbességét nem igazán néztem ( olyan 1000-1100 körül ) de a légszántás már az "X"nél 9000mm/perc és az "Y"-nál 9800mm/perc .A "X"-en 2db motor van ( 2450mm X 1450mm X 220mm ) a munka területe és felsö hidas .Ezek a sebeeségek már a 70%-ra korlátozottak .Dolgozni még 4500mm felett nem mertem , de a 16mm vastag forgács lapot 3200mm telibe viszi csak a maromotor gyenge ( 1.25Kw ) és gagyi .
[#rolleyes]
A motor sebbességét nem igazán néztem ( olyan 1000-1100 körül ) de a légszántás már az "X"nél 9000mm/perc és az "Y"-nál 9800mm/perc .A "X"-en 2db motor van ( 2450mm X 1450mm X 220mm ) a munka területe és felsö hidas .Ezek a sebeeségek már a 70%-ra korlátozottak .Dolgozni még 4500mm felett nem mertem , de a 16mm vastag forgács lapot 3200mm telibe viszi csak a maromotor gyenge ( 1.25Kw ) és gagyi .
[#rolleyes]
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 december 15, 10:04
Írta: besirkyjh Dátum 2009 december 15, 10:04
Szia
Feltétlen beleszol az is , de inkább a nagy forgorész átmérö miatt létre jött kerületi sebbesség ( tehetetlenség ) ami az igazi gondot jelenti szerintem .Bipolrisnál a mágneses tér viszonylag hamar leépül ezért is lehet gyorsabb mint egy unipoláris , persze ez nagyon függ az alkalmazott elektronikátol is .Jellemzöen a nagy Nm-es léptetömotorok lassabban forognak mint a kissebbek .Olyan 2Nm felett van egy határ aminél már számottevö a lassuság föleg ha gyengébbek a paraméterei ( nagy induktivitás , a nagy feszböl adodo nagy ohm érték vagy a forgorész nagy sullya ) ami mind beleszol a végeredménybe .Lehet kompenzálni ezeket a "hibákat " mikrostep , nagy menetemelkedésü orsok vagy más hajtás láncok pl: fogazott szij ,fogas léc stb .Ezt mindig a felhasználás dönti el ( elvárások a géppel szemben ) .
De ez már egy másik topick .
Sok sok info kell a motorokrol és utánna már lehet szelektálni .
Szerintem tökéletes megoldás nincs ( ár - érték) a hobbysták számára .De mindig nagy élmény egy most szerzett léptetö kiprobálása ( nekem ) és ez lehet akár Nema 17 vagy kissebb is .A felhasználása az egy másik dolog .
Szerintem nekünk a Nema23 kategoria megfelel hiszen 0.5Nm-töl 2Nm-ig ( eggyes tipusok 3.1Nm ) használhatoak és ezekhez viszonylag könnyü megfelelö elektronikát találni.
[#nezze][#eljen]
Feltétlen beleszol az is , de inkább a nagy forgorész átmérö miatt létre jött kerületi sebbesség ( tehetetlenség ) ami az igazi gondot jelenti szerintem .Bipolrisnál a mágneses tér viszonylag hamar leépül ezért is lehet gyorsabb mint egy unipoláris , persze ez nagyon függ az alkalmazott elektronikátol is .Jellemzöen a nagy Nm-es léptetömotorok lassabban forognak mint a kissebbek .Olyan 2Nm felett van egy határ aminél már számottevö a lassuság föleg ha gyengébbek a paraméterei ( nagy induktivitás , a nagy feszböl adodo nagy ohm érték vagy a forgorész nagy sullya ) ami mind beleszol a végeredménybe .Lehet kompenzálni ezeket a "hibákat " mikrostep , nagy menetemelkedésü orsok vagy más hajtás láncok pl: fogazott szij ,fogas léc stb .Ezt mindig a felhasználás dönti el ( elvárások a géppel szemben ) .
De ez már egy másik topick .
Sok sok info kell a motorokrol és utánna már lehet szelektálni .
Szerintem tökéletes megoldás nincs ( ár - érték) a hobbysták számára .De mindig nagy élmény egy most szerzett léptetö kiprobálása ( nekem ) és ez lehet akár Nema 17 vagy kissebb is .A felhasználása az egy másik dolog .
Szerintem nekünk a Nema23 kategoria megfelel hiszen 0.5Nm-töl 2Nm-ig ( eggyes tipusok 3.1Nm ) használhatoak és ezekhez viszonylag könnyü megfelelö elektronikát találni.
[#nezze][#eljen]
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2009 december 15, 10:16
Írta: jv7pu3a5p Dátum 2009 december 15, 10:16
Azért ezek szép számok. 5-ös emelkedésű az orsód?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 december 15, 10:24
Írta: besirkyjh Dátum 2009 december 15, 10:24
Meg sem probáltam az orsot .
A gép 2450mm-ben dolgozik ide milyen orsot tegyek kb3000mm-es kellett volna ( hitelböl sem ) , én hiszek és alkalmazom a fogasléceket .
Tehát3.1Nm léptetömotor 1:10 assitással csigakerék csiga orso és egy azt hiszem 83mm kerületü fogas kerék ( 20-22fog - 1.5 modulos ) és ez 800 és 1600mikrosteppel .Müködik .
[#eljen]
A gép 2450mm-ben dolgozik ide milyen orsot tegyek kb3000mm-es kellett volna ( hitelböl sem ) , én hiszek és alkalmazom a fogasléceket .
Tehát3.1Nm léptetömotor 1:10 assitással csigakerék csiga orso és egy azt hiszem 83mm kerületü fogas kerék ( 20-22fog - 1.5 modulos ) és ez 800 és 1600mikrosteppel .Müködik .
[#eljen]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 15, 10:30
Írta: 000000000 Dátum 2009 december 15, 10:30
Hello bocsánat a zavarásert, ki ennek a fórumnak az adminisztrátora ha szabad tudni?
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2009 december 15, 10:36
Írta: jv7pu3a5p Dátum 2009 december 15, 10:36
Jaj tényleg már olvastam egy másik topikban, hogy fogasléc. Hírtelen fel sem tűntek a gép méreteid, annyira a motorra fókuszáltam. Mindenesetre szép kis szerkezet lehet. Gratula. [#worship]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 15, 10:40
Írta: 000000000 Dátum 2009 december 15, 10:40
"Bipolrisnál a mágneses tér viszonylag hamar leépül ezért is lehet gyorsabb mint egy unipoláris ..."
Bocsi, de ez pont fordítva van! A bipoláris hídban lévő vissza-cirkulációs diódák miatt a mágnesestér jóval tovább lesz fen tartva (Lenz bácsi alapján), mint egy unipoláris meghajtásban, ahol lehetőség van a jóval magasabb emeltfeszültségű supressorok alkalmazására! Az unipoláris meghajtás (feltéve, ha mesterségesen nem rakunk bele a tápok felé vissza-cirkulációs diódákat), gyorsabban omlasztja össze a mágnesesteret mint a bipoláris, kényszer vissza-cirkulációs mód! Ezért gyorsabb, hangosabb hajtást eredményez (a H1 ezért is fütyül állóhelyzetében).
Bocsi, de ez pont fordítva van! A bipoláris hídban lévő vissza-cirkulációs diódák miatt a mágnesestér jóval tovább lesz fen tartva (Lenz bácsi alapján), mint egy unipoláris meghajtásban, ahol lehetőség van a jóval magasabb emeltfeszültségű supressorok alkalmazására! Az unipoláris meghajtás (feltéve, ha mesterségesen nem rakunk bele a tápok felé vissza-cirkulációs diódákat), gyorsabban omlasztja össze a mágnesesteret mint a bipoláris, kényszer vissza-cirkulációs mód! Ezért gyorsabb, hangosabb hajtást eredményez (a H1 ezért is fütyül állóhelyzetében).
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 15, 10:41
Írta: 000000000 Dátum 2009 december 15, 10:41
A Fórumnak én, de miért itt kérded (Léptetómotor)???
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 december 15, 10:46
Írta: besirkyjh Dátum 2009 december 15, 10:46
Szép a turot .
El keféltem a vázat és több munka volt megmerevizeni mint ha megcsináltam volna rendesen .Egy ekkora gépet 60x40 vastagfalu zártszelvényböl csak beteg ember csinál .Sikerült kimereviteni most ár viszont tényleg jo .Kapott egy külön föorsot is és azt hajtom kicsi áttétellel.Semmi gond nem melegszik nem rezonál stb munkára alkalmas .
Csak mint érdekesség ( sokan hitetlenek a fogaslécekkel ) valahol itt fellelhetö egy G-code ami egy nöi fejet ábrázol és 25x25mm a nagysága azt hiszem "lady " a neve .Azt megcsináltam ezzel a nagy géppel és hibanélkül végigmnet a plexiben és utánna a diofában is , pedig 0.02mm steppek voltak és 1200mm/perc .
De hát nem ez a dolga.Szeretem mert megbizhato .
[#eljen]
El keféltem a vázat és több munka volt megmerevizeni mint ha megcsináltam volna rendesen .Egy ekkora gépet 60x40 vastagfalu zártszelvényböl csak beteg ember csinál .Sikerült kimereviteni most ár viszont tényleg jo .Kapott egy külön föorsot is és azt hajtom kicsi áttétellel.Semmi gond nem melegszik nem rezonál stb munkára alkalmas .
Csak mint érdekesség ( sokan hitetlenek a fogaslécekkel ) valahol itt fellelhetö egy G-code ami egy nöi fejet ábrázol és 25x25mm a nagysága azt hiszem "lady " a neve .Azt megcsináltam ezzel a nagy géppel és hibanélkül végigmnet a plexiben és utánna a diofában is , pedig 0.02mm steppek voltak és 1200mm/perc .
De hát nem ez a dolga.Szeretem mert megbizhato .
[#eljen]
Cím: Re:Léptetőmotor
Írta: 0gbwyh99 Dátum 2009 december 15, 10:48
Írta: 0gbwyh99 Dátum 2009 december 15, 10:48
Üdv. mindenkinek!
A Gecko-s fórumon kérdezték Gerald-ot hogy hány wattos tápot mond Ő step mocikhoz . Azt mondta hogy az összes teljesítményüknek a 67 százalékával ajánlott számolni .
Szóval , ha veszünk egy 3 Amperos mocit és azt 50 Voltos táppal hajtjuk és feltételezzük hogy négy ilyen lesz a gépen akkor : P=4*3*50 , P=600W , abból a 67 százalék = 402W .
Elnézést ha nem mondtam nektek újat , de hátha van akit érdekel . [#wave]
A Gecko-s fórumon kérdezték Gerald-ot hogy hány wattos tápot mond Ő step mocikhoz . Azt mondta hogy az összes teljesítményüknek a 67 százalékával ajánlott számolni .
Szóval , ha veszünk egy 3 Amperos mocit és azt 50 Voltos táppal hajtjuk és feltételezzük hogy négy ilyen lesz a gépen akkor : P=4*3*50 , P=600W , abból a 67 százalék = 402W .
Elnézést ha nem mondtam nektek újat , de hátha van akit érdekel . [#wave]
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 december 15, 10:58
Írta: besirkyjh Dátum 2009 december 15, 10:58
Ebben Te vagy a jobb , én elfogadom .
A #2146 ban probáltam utalni arra hogy ez nagyban függ az alkalmazott elektronikátol is és itt egyértelmüen a H1-re gondoltam mint " sebbesség bajnokra " .
[#nemtudom]
A #2146 ban probáltam utalni arra hogy ez nagyban függ az alkalmazott elektronikátol is és itt egyértelmüen a H1-re gondoltam mint " sebbesség bajnokra " .
[#nemtudom]
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2009 december 15, 10:58
Írta: jv7pu3a5p Dátum 2009 december 15, 10:58
Na látod ezzel a merevség dologgal én is bajban voltam mikor terveztem a gépet. Nem akartam mamutot sem meg gyengét sem. Próbáltam okoskodni, szakikkal beszélgetni. Lassan beindul azt majd kiderül elég lesz-e a tervezet.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 15, 11:01
Írta: 000000000 Dátum 2009 december 15, 11:01
Biztos azzal keverted, hogy a nyomatéka viszont a bipolárisnak jobb (kb. +40%-al)! A magas nyomaték nem egyenlő a nagyobb sebességgel, mert a bipolárisnak a kezdeti nagyobb nyomatéka a diódák miatt gyorsabban hanyatlik, mint a laposabb, de szélesebb görbével rendelkező, unipoláris görbéhez viszonyítva. Nem nagy a különbség, de van.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 december 15, 11:08
Írta: besirkyjh Dátum 2009 december 15, 11:08
Persze , ha elöre gondolkodik az ember .
Nálam ez ugynézett ki hogy Internet , forum , olvastam sokat ( léptetökkel kapcsolatban ) mechanika ugyan már megy az nekem .Anyag rendelés és 2 hétmuva itt van .Addigra a váz lefestve , beállitva , lerögzitve a betonhoz kész volt .Sineket felcsavaroztam , léptetök és elektronika proba 1 nap és utánna mély viz ( napi átlag 3-5 óra kb 3 éven keresztül) kissebb hibákkal föleg saját hülyeségböl ( még gyorsabb még erösebb stb) de hát gondolom ez már ismrös .
Most már tudom hogyan kell gépet épiteni és egyenlöre maradok is a léptetönél .
Szerintem egy vázat sosem lehet tulméretezni (sztatikailag )ha ezt követi az ember akkor nagy meglepetés nem igazán érheti (legrosszabb esetben nagyobb léptetö kell hozzá ) .
Nálam ez ugynézett ki hogy Internet , forum , olvastam sokat ( léptetökkel kapcsolatban ) mechanika ugyan már megy az nekem .Anyag rendelés és 2 hétmuva itt van .Addigra a váz lefestve , beállitva , lerögzitve a betonhoz kész volt .Sineket felcsavaroztam , léptetök és elektronika proba 1 nap és utánna mély viz ( napi átlag 3-5 óra kb 3 éven keresztül) kissebb hibákkal föleg saját hülyeségböl ( még gyorsabb még erösebb stb) de hát gondolom ez már ismrös .
Most már tudom hogyan kell gépet épiteni és egyenlöre maradok is a léptetönél .
Szerintem egy vázat sosem lehet tulméretezni (sztatikailag )ha ezt követi az ember akkor nagy meglepetés nem igazán érheti (legrosszabb esetben nagyobb léptetö kell hozzá ) .
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 december 15, 11:15
Írta: besirkyjh Dátum 2009 december 15, 11:15
Hát István .
Tudod nekem volt H1-em és volt már sokfajta bipolárisom is , nem akarok nagy raklámot csinálni de egysem volt olyan jo mint a H1.
Hasonlo motorokkal ugyan olyanra beállitott áram stb az a kb 40%külömbséget én nem vettem észre csak azt hogy hajtja minden gond nélkül .
Az a fütty ami vizvállaszto nekem ,anélkül meg nem megy .Nagyon jo választás volt részedröl a H1 .Becsüld meg , megéri ez egy igazi saját termék .
[#eljen][#worship]
Tudod nekem volt H1-em és volt már sokfajta bipolárisom is , nem akarok nagy raklámot csinálni de egysem volt olyan jo mint a H1.
Hasonlo motorokkal ugyan olyanra beállitott áram stb az a kb 40%külömbséget én nem vettem észre csak azt hogy hajtja minden gond nélkül .
Az a fütty ami vizvállaszto nekem ,anélkül meg nem megy .Nagyon jo választás volt részedröl a H1 .Becsüld meg , megéri ez egy igazi saját termék .
[#eljen][#worship]
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2009 december 15, 11:19
Írta: jv7pu3a5p Dátum 2009 december 15, 11:19
Na ez nálam pont az elektronikával volt így. MAgabiztosan indultam neki, gondoltam nem lehet gond vele, a múltammal. Dehát hiába léptetőmotort még nem vezéreltem soha, nem is ismertem a felépítésüket. Az hogy tanították az iskolában, ki figyelt oda, már akkor is csak azzal foglalkoztam ami érdekelt. Szóval a gép lassan kész de az elektronika még mindig félkész. Pedig volt időm mert 5 hetet ült a gépműhely egy pár aludarab síkolásán.
Azért nem akartam túlméretezni mert majd valahogy le kell hozzam a műhelyembe már a kész beállított gépet, és gondoltam egyben kéne.
Azért nem akartam túlméretezni mert majd valahogy le kell hozzam a műhelyembe már a kész beállított gépet, és gondoltam egyben kéne.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 15, 11:20
Írta: 000000000 Dátum 2009 december 15, 11:20
[#worship]
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2009 december 15, 11:20
Írta: svejk Dátum 2009 december 15, 11:20
"vissza-cirkulációs diódák "
Ez tetszik :))
De a szakirodalom inkább visszafutó diódaként emlegeti. Esetleg az erősáramban használják még a null dióda kifejezést.
Ez tetszik :))
De a szakirodalom inkább visszafutó diódaként emlegeti. Esetleg az erősáramban használják még a null dióda kifejezést.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 15, 11:24
Írta: 000000000 Dátum 2009 december 15, 11:24
Az Angol kifejezése jut mindig eszembe (biztos innét vettem a nevét)![#vigyor3]
Szerintem kifejező...
Szerintem kifejező...
Cím: Re:Léptetőmotor
Írta: cwiw53pw Dátum 2009 december 25, 18:18
Írta: cwiw53pw Dátum 2009 december 25, 18:18
Üdv mindenkinek és Kellemes Ünnepeket!
Azt szeretném kérdezni, hogy hogyan állapítható meg egy léptetőmotorról, hogy mekkora a nyomatéka?
A kiszemelt:
Astrosyn 23pm-k302-07
2.5V/fázis
3.8A/fázis
méretei kb.: d=56mm l=52mm
Meg lehet-e becsülni súly, méret, teljesítmény alapján a nyomatékot?
Üdv.: Csikin
Azt szeretném kérdezni, hogy hogyan állapítható meg egy léptetőmotorról, hogy mekkora a nyomatéka?
A kiszemelt:
Astrosyn 23pm-k302-07
2.5V/fázis
3.8A/fázis
méretei kb.: d=56mm l=52mm
Meg lehet-e becsülni súly, méret, teljesítmény alapján a nyomatékot?
Üdv.: Csikin
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 25, 20:25
Írta: 000000000 Dátum 2009 december 25, 20:25
Súlyerő:
1kg tömegű test lefelé ható ereje kb.= 9.81 N
tehát a gyakorlatban az 1Nm-es motor 10 cm-es vízszintes erőkaron kb. 1kg tömegű testet tud felemelni
1kg tömegű test lefelé ható ereje kb.= 9.81 N
tehát a gyakorlatban az 1Nm-es motor 10 cm-es vízszintes erőkaron kb. 1kg tömegű testet tud felemelni
Cím: Re:Léptetőmotor
Írta: rbbhbyvfs Dátum 2009 december 25, 21:36
Írta: rbbhbyvfs Dátum 2009 december 25, 21:36
0.7-1Nm körül lehet, olyan nagy eltérés nem szokott lenni a méret/nyomaték párban. Azaz valszeg egy hasonló méretű is hasonló paraméterekkel fog rendelkezni. A fesz/áram értékekből pedig a fürgeségére illetve a max fordulatszámra lehet tippelni, esetünkben elég jók ezek az értékek. Mondjuk nem lesz egyszerű/olcsó egy 4A-es vezérlőt szerezni hozzá.
Cím: Re:Léptetőmotor
Írta: rbbhbyvfs Dátum 2009 december 25, 21:38
Írta: rbbhbyvfs Dátum 2009 december 25, 21:38
Na jó az 1Nm kicsit sok, google már mutatja hol láttad :)
Cím: Re:Léptetőmotor
Írta: rbbhbyvfs Dátum 2009 december 25, 21:42
Írta: rbbhbyvfs Dátum 2009 december 25, 21:42
Ja és mire kell ? Mert nekem a majd 10 kilós Z-t egy ilyen 5V/1A-es stepper rángatja 5-ös golyósorosón, szóval nem egy varrógép, de én meglepődtem... Amikor kezembe fogtam a marómotort, kicsit legörbült a szám sarka, azt hittem, hogy meg sem fogja tudni mocantani, de tévedtem, egész jól müködik...
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2009 december 26, 08:37
Írta: Szalai György Dátum 2009 december 26, 08:37
Léptetőmotor --- tartó nyomaték --- megtartani.
Nagyon van különbség a léptetőmotor tartó és forgató nyomatéka között. Sajnos.
Te ne tudnád? Biztosan csak elírtad.
Nagyon van különbség a léptetőmotor tartó és forgató nyomatéka között. Sajnos.
Te ne tudnád? Biztosan csak elírtad.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 26, 09:08
Írta: 000000000 Dátum 2009 december 26, 09:08
Igen Gyuri! A képletek topicból csak bemásoltam.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2009 december 26, 11:59
Írta: keri Dátum 2009 december 26, 11:59
5mm-es orsót 1Nm-el forgatva az anya vonó ereje 1256N lesz, vagyis ha a súrlódástól eltekintünk te is ráülhetsz a Z-re akkor is megemeli :)
Cím: Re:Léptetőmotor
Írta: cwiw53pw Dátum 2009 december 26, 14:02
Írta: cwiw53pw Dátum 2009 december 26, 14:02
Köszi a választ!
Ezek szerint a H2-es nem bírja?
Keressek olyan motort aminek 3.5A alatt van a tekercsárama?
Pl.: StepSyn 103G770-6041, bipoláris, 2,1V 2,83A
Üdv.: Csikin
Ezek szerint a H2-es nem bírja?
Keressek olyan motort aminek 3.5A alatt van a tekercsárama?
Pl.: StepSyn 103G770-6041, bipoláris, 2,1V 2,83A
Üdv.: Csikin
Cím: Re:Léptetőmotor
Írta: rbbhbyvfs Dátum 2009 december 26, 16:31
Írta: rbbhbyvfs Dátum 2009 december 26, 16:31
Nincs mit, ha megirod, hogy mi a cél, akkor egyszerűbb tanácsot adni.
Ha ki akarod használni a H2 maximális tudását, akkor célszerű alacsonyabb áramú motort használni, mint a vezérlő max árama, de ez gondolom evidens. A például motor jó lehet a vezérlőhöz, de a feladathoz?
Ha ki akarod használni a H2 maximális tudását, akkor célszerű alacsonyabb áramú motort használni, mint a vezérlő max árama, de ez gondolom evidens. A például motor jó lehet a vezérlőhöz, de a feladathoz?
Cím: Re:Léptetőmotor
Írta: cwiw53pw Dátum 2009 december 26, 16:36
Írta: cwiw53pw Dátum 2009 december 26, 16:36
A feladat: Első gép, és örülnék, ha alumíniumot is lehetne vele marni :) Egy 1kW-os marómotorom van eddig, meg egy H2-höz megfelelő trafóm.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2009 december 26, 17:35
Írta: 000000000 Dátum 2009 december 26, 17:35
Kérdezd meg a gyártót, Istvánt, szerintem Ő tud tanácsot adni, hogy belefér-e még a vezérlő tudásába!
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 december 27, 08:19
Írta: besirkyjh Dátum 2009 december 27, 08:19
Sziasztok
Nyugottan rá teheted a motort (2.5V 3.8A ) a H2-re .A H2-n a 3.5A a maximális terhelhetöség , és tehetsz rá akár 10A motort is akkor is csak 3.5A lessz a leadott max teljesitmény .Ugy sem kell a csucs áramot beállitani a H2-n és még igy is böven eléglessz a motorod a feledathoz ( lásd mit is a Keri ) .
Vannak más paranéterek is amik beleszolnak a végeredménybe de ahoz tudni kellene hogy milyen lessz a gép és ha már adott a követelmény ( méret , pontosság , gyorsasag , gyorsulás ) akkor döl el igazán hogy mekkora motorra van szükséged .Általában az 1Nm mtor böven elég szokott lenni egy kissebb (300 X 300mm es) géphez .
Nyugottan rá teheted a motort (2.5V 3.8A ) a H2-re .A H2-n a 3.5A a maximális terhelhetöség , és tehetsz rá akár 10A motort is akkor is csak 3.5A lessz a leadott max teljesitmény .Ugy sem kell a csucs áramot beállitani a H2-n és még igy is böven eléglessz a motorod a feledathoz ( lásd mit is a Keri ) .
Vannak más paranéterek is amik beleszolnak a végeredménybe de ahoz tudni kellene hogy milyen lessz a gép és ha már adott a követelmény ( méret , pontosság , gyorsasag , gyorsulás ) akkor döl el igazán hogy mekkora motorra van szükséged .Általában az 1Nm mtor böven elég szokott lenni egy kissebb (300 X 300mm es) géphez .
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 december 27, 08:25
Írta: besirkyjh Dátum 2009 december 27, 08:25
Ja bocs de kimaradt hogy a megmunkálando anyag ( aluminium , müanyag stb) ezek talán a legfontosabb szempontok a ,motor kiválasztásánál .Indulj ki abbol hogy egy léptetöt max 700fordulatig lehet biztonságosan használni ( forog többet is csak ott már lehetnek gondok )és ebböl a fordulatbol már lehet számolni .
Cím: Re:Léptetőmotor
Írta: cwiw53pw Dátum 2009 december 27, 16:11
Írta: cwiw53pw Dátum 2009 december 27, 16:11
Úgy gondoltam, hogy a vezérlő fix, a legjobb ár/érték arányú motorokat veszem hozzá (ezek szerint a 2.5V/3.8A/2500Ft elég jó), kb 400x400x200mm megmunkálási tartomány van tervben. Az a baj mindig a legjobbat akarom kihozni, amit lehet, de nincs sok próbálkozásom:) Még csak fejben vannak tervek, de lassan le kéne modellezni.
Abban tudtok még segíteni hogy forgácsoláskor mekkora erők lépnek fel? valami általános esetre gondoltam paraméteresen.
Köszi!
Üdv.: Csikin
Abban tudtok még segíteni hogy forgácsoláskor mekkora erők lépnek fel? valami általános esetre gondoltam paraméteresen.
Köszi!
Üdv.: Csikin
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2009 december 27, 18:22
Írta: besirkyjh Dátum 2009 december 27, 18:22
Szia
A számokat most hagyjad , keress inkább tapasztalatot az most többet segit .A számokban elveszel ( milyen anyag milyen mélyen milyen sebességgel milyem alaku maroval hányélü maroval stb ) soroljam még?
Kérdezd meg hogy ki mit használ egy adott feladatra és milyen géppel ?
[#integet2]
A számokat most hagyjad , keress inkább tapasztalatot az most többet segit .A számokban elveszel ( milyen anyag milyen mélyen milyen sebességgel milyem alaku maroval hányélü maroval stb ) soroljam még?
Kérdezd meg hogy ki mit használ egy adott feladatra és milyen géppel ?
[#integet2]
Cím: Re:Léptetőmotor
Írta: rbbhbyvfs Dátum 2009 december 27, 19:37
Írta: rbbhbyvfs Dátum 2009 december 27, 19:37
Ami fontosabb, hogy milyen orsód lesz és milyen megvezetésed? Ha golyós, akkor jó, ha trapézmenetes orsó, akkor óvatosabban, annak nagyobb a surlódása, többet elvisz a motor teljesitményéből.
Cím: Re:Léptetőmotor
Írta: rbbhbyvfs Dátum 2009 december 27, 19:39
Írta: rbbhbyvfs Dátum 2009 december 27, 19:39
De én is kérdeznék : hogyan fúrnátok egy stiftnek lyukat egy létetőmotor tengelyébe? 6.3-as tengely, 2mm-es stift. Per pillanat igy van az orsó rögzitve, de nagyobb motort szeretnék majd rátenni....
Cím: Re:Léptetőmotor
Írta: 0gbwyh99 Dátum 2009 december 28, 07:30
Írta: 0gbwyh99 Dátum 2009 december 28, 07:30
Hogy is van az az orsó rögzítve stifttel a motor tengelyéhez ? Kérlek ezt nem értem . Az orsóban van üreg fúrva és abba dugod bele a moci tengelyvégét ?
A fúrás az meg nálam úgy menne hogy pontozóval bejelölném a furat helyét , befognám a tengelyt a gépsatuba úgy hogy veszek egy 6mm vastag laposvasat amire felülről ranyomnám a tengelyvéget hogy vízszintesen aljon , alápolcolnám a gépsatut amennyit kell hogy a motor ne akadályozzon és ne is lógjon a levegőbe , be raknám az oszlopos fúrógép alá , leengedném a fúróélet majdnem a tengelyig , gumikalapáccsal kocogtatnám még a fúróél pontosan a bejelölt pontra nem érne és kifurnám .
A fúrás az meg nálam úgy menne hogy pontozóval bejelölném a furat helyét , befognám a tengelyt a gépsatuba úgy hogy veszek egy 6mm vastag laposvasat amire felülről ranyomnám a tengelyvéget hogy vízszintesen aljon , alápolcolnám a gépsatut amennyit kell hogy a motor ne akadályozzon és ne is lógjon a levegőbe , be raknám az oszlopos fúrógép alá , leengedném a fúróélet majdnem a tengelyig , gumikalapáccsal kocogtatnám még a fúróél pontosan a bejelölt pontra nem érne és kifurnám .
Cím: Re:Léptetőmotor
Írta: rbbhbyvfs Dátum 2009 december 28, 09:14
Írta: rbbhbyvfs Dátum 2009 december 28, 09:14
Igen, pontosan úgy, maga a motor az orsó "csapágyazása". Köszönöm, meglátom mit tudok kihozni a kinai oszlopos fúrógépből :)
Cím: Re:Léptetőmotor
Írta: ra8nsmk6w Dátum 2009 december 28, 10:29
Írta: ra8nsmk6w Dátum 2009 december 28, 10:29
A fúrás helyén köszörülj be egy 0.3 mm. A kemény réteg még a kimenetnél is okozhat gondot de az orvosolható. HSS-E a minimum fúróminőség
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2009 december 30, 16:51
Írta: ANTAL GÁBOR Dátum 2009 december 30, 16:51
léptecs zárt hurkú vezérlése (a léptecs egy kétfázisú 100 polusú szervóként kezelve szinuszmezős táplálással)
http://www.qcontrol.com/SP/WP/QCI-WP003_ServoControlOfMicrostepMotor.pdf
http://www.qcontrol.com/SP/WP/QCI-WP003_ServoControlOfMicrostepMotor.pdf
Cím: Re:Léptetőmotor
Írta: 0gbwyh99 Dátum 2009 december 31, 06:09
Írta: 0gbwyh99 Dátum 2009 december 31, 06:09
Húha , az nem lesz jó hosszútávon ! Kinyírod a motor csapágyát . Azért használnak tengelykapcsolót mert az orsót is illik felcsapágyazni és utána a teng.kapcs.-val az illesztési hibát küszöbölik ki .. de , gondolom , ezt te is tudod .
Cím: Re:Léptetőmotor
Írta: robroy007 Dátum 2010 január 02, 17:26
Írta: robroy007 Dátum 2010 január 02, 17:26
áthoztam ide a boncolásból
Itt egy egyszerű vezérlő ami step dir rendszerű és ez is 2Ampert tud mint az STK6722.
STEP DIR VEZÉRLŐ
Itt egy egyszerű vezérlő ami step dir rendszerű és ez is 2Ampert tud mint az STK6722.
STEP DIR VEZÉRLŐ
Cím: Re:Léptetőmotor
Írta: robroy007 Dátum 2010 január 02, 17:27
Írta: robroy007 Dátum 2010 január 02, 17:27
modik javítsátok ki légyszives
Cím: Re:Léptetőmotor
Írta: robroy007 Dátum 2010 január 02, 17:27
Írta: robroy007 Dátum 2010 január 02, 17:27
Itt egy egyszerű vezérlő ami step dir rendszerű és ez is 2Ampert tud mint az STK6722.
STEP DIR VEZÉRLŐ
kapcsolási rajz
STEP DIR VEZÉRLŐ
kapcsolási rajz
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2010 január 03, 13:44
Írta: s5f8tmfv3 Dátum 2010 január 03, 13:44
Kéretik nem kiröhögni!
Eredetileg 6 kivezetéses léptetőmotorjaimat unipoláris vezérlővel hajtottam.
Ha az alábbi kép szerint kötve bipoláris vezérlőre kötöm lesz-e változás nyomatékban vagy sebességben?

Eredetileg 6 kivezetéses léptetőmotorjaimat unipoláris vezérlővel hajtottam.
Ha az alábbi kép szerint kötve bipoláris vezérlőre kötöm lesz-e változás nyomatékban vagy sebességben?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 03, 13:59
Írta: s7manbs8 Dátum 2010 január 03, 13:59
Hogyne lenne, István oldalán valahol ott van ez is.
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2010 január 03, 14:54
Írta: s5f8tmfv3 Dátum 2010 január 03, 14:54
A változás mibenlétét is meg tudod mondani?
Összehasonlítást ugyanarra a motorra uni- vagy féltekercses bipol hajtásra nem találtam.
Összehasonlítást ugyanarra a motorra uni- vagy féltekercses bipol hajtásra nem találtam.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 03, 14:57
Írta: s7manbs8 Dátum 2010 január 03, 14:57
Olyan 30-40%-kal nagyobb nyomaték, és fordulatszám növekmény is, valami ilyesmire emlékszem. Tehát elég jelentős.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 03, 15:01
Írta: s7manbs8 Dátum 2010 január 03, 15:01
http://www.hobbycnc.hu/CNC/Profi2/Profi2M/Profi2M.htm
Ebben ír ezekről.
Ebben ír ezekről.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 03, 15:03
Írta: s7manbs8 Dátum 2010 január 03, 15:03
http://www.hobbycnc.hu/CNC/Motor/Uj/Motorok.htm
Ebben is a vége fele megemlíti.
Ebben is a vége fele megemlíti.
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2010 január 03, 15:21
Írta: s5f8tmfv3 Dátum 2010 január 03, 15:21
Megnézem, köszi!
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 03, 15:47
Írta: jv7pu3a5p Dátum 2010 január 03, 15:47
Szerintem nem egészen így van. Amatőr 6 kivezetéses motorról beszél. Ott pedig nem lehet a 2-2 tekercset párhuzamosan kötni.
Egyszerű paraszti ésszel azt mondanám, hogy nem fog változni a nyomatékod mert továbbra is egy tekercs fog egy fázisban vezérlést kapni.
Egyszerű paraszti ésszel azt mondanám, hogy nem fog változni a nyomatékod mert továbbra is egy tekercs fog egy fázisban vezérlést kapni.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 03, 15:49
Írta: s7manbs8 Dátum 2010 január 03, 15:49
Lehet igaz, de ha nyomaték nem is lesz nagyobb, fordulat igen.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 03, 15:52
Írta: jv7pu3a5p Dátum 2010 január 03, 15:52
Ennyire nem vágom a témát de nézz vissza #2151. István mást írt.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 03, 15:56
Írta: jv7pu3a5p Dátum 2010 január 03, 15:56
Elektron!
Isten fizesse meg a javaslatodat, hogy váltsak át egész lépéses módra nagy fordulaton. Jelenleg 300 frodulat felett mikrolépést kikapcsolom. Iszonyat sebességet értem el vele 5500mm/perc és mindezt csupán 3mm osrsóemelkedésnél. De természetesen itt már nem biztonságos üzemeltetni.
[#worship]
Isten fizesse meg a javaslatodat, hogy váltsak át egész lépéses módra nagy fordulaton. Jelenleg 300 frodulat felett mikrolépést kikapcsolom. Iszonyat sebességet értem el vele 5500mm/perc és mindezt csupán 3mm osrsóemelkedésnél. De természetesen itt már nem biztonságos üzemeltetni.
[#worship]
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 03, 16:03
Írta: s7manbs8 Dátum 2010 január 03, 16:03
Van egy kis ellentmondás valahol ...
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 03, 16:04
Írta: s7manbs8 Dátum 2010 január 03, 16:04
Örülök neki, már nekem is megvan ez a vezérlő programom írva, de még nem teszteltem, hamarabb elmondtam neked.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 03, 16:05
Írta: jv7pu3a5p Dátum 2010 január 03, 16:05
És milyen jól tetted majd rakok fel vidit. [#wink]
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 03, 16:06
Írta: s7manbs8 Dátum 2010 január 03, 16:06
Azt se mondtam, hogy PWM-mel kell hajtani. Tekercs áram irányváltáskor pont gyorsan kell változni az áramnak, és kisebb induktivitás miatt hamarabb fel-leépül a tér.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 03, 16:07
Írta: s7manbs8 Dátum 2010 január 03, 16:07
Azt meg néznénk tényleg. szép sebesség. [#vigyor4]
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 03, 16:13
Írta: jv7pu3a5p Dátum 2010 január 03, 16:13
na nekem is pont ez jutott eszembe. Mindenesetre nekem bipoláris mocijaim vannak és van sebesség is bőven.
Cím: Re:Léptetőmotor
Írta: may47wb Dátum 2010 január 03, 16:21
Írta: may47wb Dátum 2010 január 03, 16:21
Raktam fel egy videót. Ezt akkor csináltam amikor még az L297/L298-as ic-kel szórakoztam. Én a két tekercs két végét kötöttem be az unipoláris motorokon. VIDEO
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 03, 16:22
Írta: s7manbs8 Dátum 2010 január 03, 16:22
Ezt az ötletet össze lehetne kombinálni, kis fordulatra léptetőt használva, nagyra meg szervót.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 03, 16:37
Írta: jv7pu3a5p Dátum 2010 január 03, 16:37
NA íme:
3600mm/perc videó
5200mm/perc videó
A gyorsabb videón látszik a vezérlő is a jobb alsó sarokban. A led zöldröl pirosra vált mikor átlép egész lépéses üzembe a vezérlő.
A sebességek a MACH3ban lettek beállítva, szkóppal még nem néztem hogy valós-e, gondolom azért jól időzít a MACH.
3600mm/perc videó
5200mm/perc videó
A gyorsabb videón látszik a vezérlő is a jobb alsó sarokban. A led zöldröl pirosra vált mikor átlép egész lépéses üzembe a vezérlő.
A sebességek a MACH3ban lettek beállítva, szkóppal még nem néztem hogy valós-e, gondolom azért jól időzít a MACH.
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2010 január 03, 17:14
Írta: s5f8tmfv3 Dátum 2010 január 03, 17:14
Köszönöm! Magi úr a középső és az egyik szélső kivezetés bekötését ajánlja. Jó a videó!
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2010 január 03, 17:14
Írta: s5f8tmfv3 Dátum 2010 január 03, 17:14
Ez igen! Milyen vezérő ez?
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 03, 17:41
Írta: jv7pu3a5p Dátum 2010 január 03, 17:41
Saját fejlesztés, mikrokontrollerrel vezérelve nem cél IC.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 január 03, 18:10
Írta: 000000000 Dátum 2010 január 03, 18:10
Nagyon szépen megy mindkét sebességen. Megérte a sok munkát.
Cím: Re:Léptetőmotor
Írta: yuagaci9g Dátum 2010 január 03, 19:01
Írta: yuagaci9g Dátum 2010 január 03, 19:01
A gyorsulasokat allitasd a leheto leg nagyobbra, mert igy nem fogysz tudni korrektul dolgozni vele!
Inkabb kissebb vegsebesseg legyen, de ne halljad fullel a gyorsitasi szakaszt, ugy lesz jo a geped!
Varom a videot...
Inkabb kissebb vegsebesseg legyen, de ne halljad fullel a gyorsitasi szakaszt, ugy lesz jo a geped!
Varom a videot...
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 03, 19:03
Írta: jv7pu3a5p Dátum 2010 január 03, 19:03
Igen volt vele rendesen. A nagyobb sebességen azért gyakran megáll. Sajna a mechanikám a bronz perselyek és a trapéz orsó/danamid miatt nem olyan gördülékeny. Biztos jobban futna nagyobb sebességen ha simább lenne a mechanika is. Képtelen voltam úgy belőni, hogy a végállások előtt 10-30mm belül ne legyen egy icipici szorulás. De ott elvileg nem is használom.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 január 03, 19:37
Írta: 000000000 Dátum 2010 január 03, 19:37
Írod, hogy váltogatod a felbontást (vezérlő oldalon). Ezt nem okoz "lépésvesztést" a Mach oldalán (Hisz a Mach, meg minden CNC Vezérlő fix felbontással számol)?! Csináltál jó sok, alapos 0-pontra állási pontossági teszteket?!
Az az érzésem, hogy rejtet léptetés vesztések előfordulhatnak ilyen reptében felbontás állítással...[#merges2]
Az az érzésem, hogy rejtet léptetés vesztések előfordulhatnak ilyen reptében felbontás állítással...[#merges2]
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 03, 20:36
Írta: jv7pu3a5p Dátum 2010 január 03, 20:36
Eddig még nem vettem észre, hogy vesztene. Martam vele 5mm alut átvágva. 5x mentem át ugyanott mire átvágta, de a felületen nem látszott, hogy máshova állt volna vissza. A lépésváltást természetesen az elektronika végzi, ugyanúgy kapja a mikrolépéshez szükséges impulzust egész lépéses üzemben is, csak éppen figyelmen kívül hagyja ami nem kell neki. Mikrolépésben képtelen voltam nagyobb fordulatokra, így legalább pörög rendesen.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 03, 20:46
Írta: s7manbs8 Dátum 2010 január 03, 20:46
A PWM-et nem váltod, csak ritkábban, ugye ?
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 03, 20:50
Írta: jv7pu3a5p Dátum 2010 január 03, 20:50
Itt van amit kértél! :)
A gyorsulás most 400mm/s2, a sebességet így vissza kellett vennem 2500ra, hogy stabíl legyen. Kicsit jobban rángatja a gépet így.
A gyorsulás most 400mm/s2, a sebességet így vissza kellett vennem 2500ra, hogy stabíl legyen. Kicsit jobban rángatja a gépet így.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 03, 20:54
Írta: jv7pu3a5p Dátum 2010 január 03, 20:54
A PWM szabályzás az áram mérés sebességével történik, most hírtelen nem is tudom mennyi az. De nagy sebességeknél nincs is szabályzás, mert ahogy figyelgettem elmegy maxba, hogy tudja tartani az áramot. Igaz azóta 60Vról hajtom, meg kéne megint néznem mi a helyzet, mert a fejlesztés 33Von történt.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 január 03, 21:00
Írta: besirkyjh Dátum 2010 január 03, 21:00
Szia
Nekem ugytünik hogy az egészlépés nem igazán hasznos .
Ezekkel a paraméterekkel mikroval is képes lenne erre a sebességre .
Bár Te tudod milyen volt és most milyen .
[#nemtudom]
Nekem ugytünik hogy az egészlépés nem igazán hasznos .
Ezekkel a paraméterekkel mikroval is képes lenne erre a sebességre .
Bár Te tudod milyen volt és most milyen .
[#nemtudom]
Cím: Re:Léptetőmotor
Írta: gsbwxanch Dátum 2010 január 03, 22:07
Írta: gsbwxanch Dátum 2010 január 03, 22:07
Nem tud valaki egy EM-93-as kis léptetőmotor (Epson nyomtatóból) hány amperos?
Csak ezt találtam a serviz manuálban.
pdf
Csak ezt találtam a serviz manuálban.
Cím: Re:Léptetőmotor
Írta: gsbwxanch Dátum 2010 január 03, 22:08
Írta: gsbwxanch Dátum 2010 január 03, 22:08
Bocsi... - Tudja - akart lenni..
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 03, 22:09
Írta: s7manbs8 Dátum 2010 január 03, 22:09
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 03, 22:10
Írta: jv7pu3a5p Dátum 2010 január 03, 22:10
Szia
Szerintem az egész lépéssel nincs semmi baj nagyobb fordulaton, mert ott már nincs akkora rezonancia, így nem is nagyon számít hogy hajtod. Érezni lehet milyen szépen simán jár ha megfogom.
Szerintem az egész lépéssel nincs semmi baj nagyobb fordulaton, mert ott már nincs akkora rezonancia, így nem is nagyon számít hogy hajtod. Érezni lehet milyen szépen simán jár ha megfogom.
Cím: Re:Léptetőmotor
Írta: gsbwxanch Dátum 2010 január 03, 22:23
Írta: gsbwxanch Dátum 2010 január 03, 22:23
csak 0,75A...hmmm nem kevés ez...
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 03, 22:30
Írta: s7manbs8 Dátum 2010 január 03, 22:30
A gyári adatlapjáról van az adat.
Cím: Re:Léptetőmotor
Írta: gsbwxanch Dátum 2010 január 03, 22:31
Írta: gsbwxanch Dátum 2010 január 03, 22:31
Ok. Az rendben.
Végülis egy kis géphez talán jó...
Végülis egy kis géphez talán jó...
Cím: Re:Léptetőmotor
Írta: may47wb Dátum 2010 január 03, 22:36
Írta: may47wb Dátum 2010 január 03, 22:36
Hogy működik ez a vezérlő? Menet közbe vált lépés módot? Ha én mondjuk átdugom a jampert PL: 1/16-rol, 1/4-re akkor a machbe át kell írnom a lépés/fordulatot. Te ezt hogy oldottad meg?
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 03, 23:17
Írta: jv7pu3a5p Dátum 2010 január 03, 23:17
A MACH3 nem is tud róla hogy a vezérlő egész lépésben megy tovább. Ö továbbra is 266.6 impulzust generál 1mm-hez. A vezérlő szoftverét úgy írtam meg, hogy méri a jelek periódusidejét és ha egy bizonyos érték alá csökken jelen esetemben 276uS, akkor átvált egész lépésre, de csak a vezérlés, a jelek továbbr ais érkeznek de csak azt veszem figyelembe amelyik az egészlépés pozíciója. Nem tudom elég érthetően fogalmaztam-e?
Cím: Re:Léptetőmotor
Írta: may47wb Dátum 2010 január 03, 23:46
Írta: may47wb Dátum 2010 január 03, 23:46
Ez teljesen egyedi dolog, vagy létezik ilyen vezérlő a piacon?
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 04, 00:02
Írta: jv7pu3a5p Dátum 2010 január 04, 00:02
Fogalmam sincs. Az ötletet elektron adta, én csak leprogramoztam. Miért szeretnél te is ilyet?
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 január 04, 00:05
Írta: me3ua0a6 Dátum 2010 január 04, 00:05
Egy ilyen nekem is tetszene. Mechanikámból adódóan a pontos léptetéshez talán még 16-os mikrolépés is szükséges lesz, viszont ha vissza lehetne venni, akkor szép sebessége lenne, pl rajzoláshoz, meg üresjáráshoz.
Cím: Re:Léptetőmotor
Írta: may47wb Dátum 2010 január 04, 00:07
Írta: may47wb Dátum 2010 január 04, 00:07
Épp most készül egy 10A-es vezérlő, és ha hasznos dolog ez a lépé mód váltás, vagy ha érdemes lenne vele foglalkozni, akkor jobban megvizsgálnánk ezt a dolgot.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 04, 00:11
Írta: jv7pu3a5p Dátum 2010 január 04, 00:11
Egy ügyes programozó 5 perc alatt leprogramozza és ki lehet próbálni. Nekem eddig bevált, igaz még nem csináltam komoly marásokat. De tesztelek folyamatosan.
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 január 04, 00:15
Írta: me3ua0a6 Dátum 2010 január 04, 00:15
Egy kérdés! Érdekes a dolog:
Megy a géped x előtolással, pl 1/10-es mikrolépésben, ami legyen pl 10khz-es step jel.
Ha kiveszed a vezérlőt egész lépésbe, akkor csak minden 10. step jelet kell figyelembe venni. Ez azt jelenti, hogy 10khz-en jön a step, de nekünk 1khz a hasznos jel. Viszont a mach3 nem tudja, hogy most már gyorsíthatna, hiszen egész lépésben van.
Magyarán szólva: ha nem akarunk arányt rontani a koordináta rendszerben, akkor a 10-szer nagyobb lépéshez minden 10. step jelet kell figyelembe venni. De így akkor a sebesség ugyanakkora. Mit is nyertünk ezzel? Erőtartalékot?
Megy a géped x előtolással, pl 1/10-es mikrolépésben, ami legyen pl 10khz-es step jel.
Ha kiveszed a vezérlőt egész lépésbe, akkor csak minden 10. step jelet kell figyelembe venni. Ez azt jelenti, hogy 10khz-en jön a step, de nekünk 1khz a hasznos jel. Viszont a mach3 nem tudja, hogy most már gyorsíthatna, hiszen egész lépésben van.
Magyarán szólva: ha nem akarunk arányt rontani a koordináta rendszerben, akkor a 10-szer nagyobb lépéshez minden 10. step jelet kell figyelembe venni. De így akkor a sebesség ugyanakkora. Mit is nyertünk ezzel? Erőtartalékot?
Cím: Re:Léptetőmotor
Írta: may47wb Dátum 2010 január 04, 00:19
Írta: may47wb Dátum 2010 január 04, 00:19
Lépésvesztés tesztre én két motort 90fokba elfordítva összeszereltem és raktam rá egy lézert, és írtam egy gkódot hozzá, a szobába kis dolgokra ment a sugár órákon keresztül, ha egy lépést tévedett 1/16-os mikrolépésbe az szemmel látható volt. Lehet hogy hülye ötlet volt de én így teszteltem.
Cím: Re:Léptetőmotor
Írta: yuagaci9g Dátum 2010 január 04, 06:05
Írta: yuagaci9g Dátum 2010 január 04, 06:05
Igy mar jobban hangzik!
Probalj pl. kis negyszoget gravirozni``Constant velocity`` allasban, mindket beallitassal, a sarkokban lathato lesz a kulonbseg.
Probalj pl. kis negyszoget gravirozni``Constant velocity`` allasban, mindket beallitassal, a sarkokban lathato lesz a kulonbseg.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 január 04, 06:57
Írta: 000000000 Dátum 2010 január 04, 06:57
Teszteld az ékteszttel 1000×! Ott látható lesz a hegyek elcsúszása ha gond lenne!
Még mindig nem értem a törte (nem kerek 10-el osztható lépések) lekezeléle!
Azt sem értem, miért érsz el kisebb sebességet a mikro-steppel mint egész lépéssel?! Szerintem a mikro-step kezeléseddel volt a gond, ezért nem pörgött ki a motor rendesen.
Még mindig nem értem a törte (nem kerek 10-el osztható lépések) lekezeléle!
Azt sem értem, miért érsz el kisebb sebességet a mikro-steppel mint egész lépéssel?! Szerintem a mikro-step kezeléseddel volt a gond, ezért nem pörgött ki a motor rendesen.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 04, 08:55
Írta: jv7pu3a5p Dátum 2010 január 04, 08:55
Megpróbálom csak előbb gravírtűt kell szerezni vagy csinálni. :)
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 04, 09:06
Írta: jv7pu3a5p Dátum 2010 január 04, 09:06
OK. Kipróbálom.
Ezt már kitárgyaltuk annak idején az elektronika topikban. Valószínűleg azért nem tudtam mikrosteppel gyorsan pörgetni a motort mert nem tudok AVRrel olyan gyorsan áramot mérni és szabályozni. De amúgy sem értem még mindig hogy a cél ICk hogyan csinálják. Mert kb 600 fordulat felett nekem már kiakadt 255be a PWM értéke, mindezt azért tette hogy tudja tartani az áramot, de sokszor már így sem tudta a beállítottat tartani. És akkor ebből még a mikrostepphez vissza kéne szabályozni az amúgyis kevés áramhoz. Szóval zavaros egy kicsit, ez a része. Alacsony fordulaton ott ok, semmi gond hibátlanul szabályozható és tartható.
MIért kéne 10-zel osztani? semmi köze a dolognak ehhez.
Tegyük fel, hogy forog a motor mikrosteppben. Éppen két tekercs között van mikor az elektronika úgy itéli meg, hogy átvált mivel az érkezett impulzus ideje kevesebb 276uS-nél. Ekkor ami jön impulzus figyelmen kívül hagyja, motor marad ahol van. Mindezt addig csinálja míg jön egy olyan impulzus ami már tekercspozícióba állítja a motort. Ezt végrehajtja. Gond talán akkor lehetne ha hírtelen kéne megállnia a motornak egészlépésből, de lehet akkor sem. De ez úgysem áll fenn mert szerencsére van lassítás gyorsítás.
Ezt már kitárgyaltuk annak idején az elektronika topikban. Valószínűleg azért nem tudtam mikrosteppel gyorsan pörgetni a motort mert nem tudok AVRrel olyan gyorsan áramot mérni és szabályozni. De amúgy sem értem még mindig hogy a cél ICk hogyan csinálják. Mert kb 600 fordulat felett nekem már kiakadt 255be a PWM értéke, mindezt azért tette hogy tudja tartani az áramot, de sokszor már így sem tudta a beállítottat tartani. És akkor ebből még a mikrostepphez vissza kéne szabályozni az amúgyis kevés áramhoz. Szóval zavaros egy kicsit, ez a része. Alacsony fordulaton ott ok, semmi gond hibátlanul szabályozható és tartható.
MIért kéne 10-zel osztani? semmi köze a dolognak ehhez.
Tegyük fel, hogy forog a motor mikrosteppben. Éppen két tekercs között van mikor az elektronika úgy itéli meg, hogy átvált mivel az érkezett impulzus ideje kevesebb 276uS-nél. Ekkor ami jön impulzus figyelmen kívül hagyja, motor marad ahol van. Mindezt addig csinálja míg jön egy olyan impulzus ami már tekercspozícióba állítja a motort. Ezt végrehajtja. Gond talán akkor lehetne ha hírtelen kéne megállnia a motornak egészlépésből, de lehet akkor sem. De ez úgysem áll fenn mert szerencsére van lassítás gyorsítás.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 január 04, 17:22
Írta: 000000000 Dátum 2010 január 04, 17:22
"Ekkor ami jön impulzus figyelmen kívül hagyja, motor marad ahol van. Mindezt addig csinálja míg jön egy olyan impulzus ami már tekercspozícióba állítja a motort. Ezt végrehajtja. Gond talán akkor lehetne ha hírtelen kéne megállnia a motornak egészlépésből, de lehet akkor sem. De ez úgysem áll fenn mert szerencsére van lassítás gyorsítás. "
Pontosan erre gondoltam! Ez itt szerintem rizikós. Ha a határt nem kellően jelölöd ki, akkor "tört" lépésnél impulzus vesztés lép fel.
Pontosan erre gondoltam! Ez itt szerintem rizikós. Ha a határt nem kellően jelölöd ki, akkor "tört" lépésnél impulzus vesztés lép fel.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 január 04, 17:24
Írta: 000000000 Dátum 2010 január 04, 17:24
Ráadásaul maga a léptetés fáziskéséssel zajlik, mert impulzus hoszt (szünetet) csak a már lelépett impulzusok között tudunk mérni, addig a motor nem kezdheti meg a következő pozícióba lépést, az-az kvázi a PC és a léptecs egy teljes léptetési szöggel mindig késni fog.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 05, 07:58
Írta: jv7pu3a5p Dátum 2010 január 05, 07:58
A léptetés nem zajlik fáziskéséssel, ahogy bejön a megszakítás rögtön lecsekkolja, hogy az előzőhöz képest mennyi idő telt el és dönt a vezérlésben. MAx 5us telik el a megszakítás és vezérlés között. Elindítottam a teszteket, de úgy néz ki sajna van valmi relytett gibám még a vezérlőben mert akadozik, főleg alacsony fordulaton. Most javítom aztán jönnek a tesztek.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 január 05, 22:47
Írta: keri Dátum 2010 január 05, 22:47
Nem ilyen vészes a probléma szerintem.
Van egy számlálód ami a step/dir léptet.
Ez a számláló címzi meg az aktuális mikrolépés fázist. Célszerűen a számláló maximális értéke 2 valamelyik hatványa, vagyis mondjuk egy 8 bites számláló. Mivel a mikrolépés is tartalmazza az egész lépések fázisait, csak annyi a dolgod, hogy csak a felső kettő, vagy fél lépés esetén három bitet hagyod meg a címzéskor, persze célszerű még egy matematikai kerekítést is alkalmazni a címzésnél és akkor a legközelebbi fél lépésre ugrik. Innentől kezdve fél lépéses üzemmódban megy amíg vissza nem tér mikrolépésbe, akkor pedig visszaugrik a finomított pozícióra. Lépésvesztés kizárt, legfeljebb a pontosság romlik gyorsabb mozgáskor, de mivel a mikrolépéssel nem a pontosság növelése a cél, mert az már fél lépésnél is elegendő, ezért nem gond.
Ellenben nyomatékosabb lesz nagyobb fordulaton, hiszen több ideig van maximális áram engedélyezve, így az indukció miatt nagyobb lesz a tekercsen mért áramgörbe alatti terület, és így a nyomaték.
Persze ez egy normálisan megvalósított mikrólépésnél nem probléma.
Elektrontól függetlenül én is kitaláltam ezt a módszert...mondjuk adja magát a gyakorlatban, amikor mikrólépésben nem forog annyit a motor mint teljes lépésben.
Van egy számlálód ami a step/dir léptet.
Ez a számláló címzi meg az aktuális mikrolépés fázist. Célszerűen a számláló maximális értéke 2 valamelyik hatványa, vagyis mondjuk egy 8 bites számláló. Mivel a mikrolépés is tartalmazza az egész lépések fázisait, csak annyi a dolgod, hogy csak a felső kettő, vagy fél lépés esetén három bitet hagyod meg a címzéskor, persze célszerű még egy matematikai kerekítést is alkalmazni a címzésnél és akkor a legközelebbi fél lépésre ugrik. Innentől kezdve fél lépéses üzemmódban megy amíg vissza nem tér mikrolépésbe, akkor pedig visszaugrik a finomított pozícióra. Lépésvesztés kizárt, legfeljebb a pontosság romlik gyorsabb mozgáskor, de mivel a mikrolépéssel nem a pontosság növelése a cél, mert az már fél lépésnél is elegendő, ezért nem gond.
Ellenben nyomatékosabb lesz nagyobb fordulaton, hiszen több ideig van maximális áram engedélyezve, így az indukció miatt nagyobb lesz a tekercsen mért áramgörbe alatti terület, és így a nyomaték.
Persze ez egy normálisan megvalósított mikrólépésnél nem probléma.
Elektrontól függetlenül én is kitaláltam ezt a módszert...mondjuk adja magát a gyakorlatban, amikor mikrólépésben nem forog annyit a motor mint teljes lépésben.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 január 05, 22:49
Írta: keri Dátum 2010 január 05, 22:49
Vagy ha problémásnak érzed, hogy visszalép a megkezdett mikrolépésből, akkor úgy kell megírni, hogy csak egész lépésfázisnál váltson üzemmódot és akkor tökéletes az átmenet, ilyenkor kerekíteni sem kell a címzésnél
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 január 05, 22:51
Írta: keri Dátum 2010 január 05, 22:51
Ja de amit kérdezni akartam eredetileg:
Mekkora maximális feszültséggel lehet meghajtani egy léptető motort?
100V még mehet?
Mekkora maximális feszültséggel lehet meghajtani egy léptető motort?
100V még mehet?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 január 05, 23:05
Írta: besirkyjh Dátum 2010 január 05, 23:05
Szia
Na birja ?[#nevetes1]
Van egy elméleti tuning tényezö , ( 25 ) de ez nem mindig igaz .
Proba !![#nemtudom]
Na birja ?[#nevetes1]
Van egy elméleti tuning tényezö , ( 25 ) de ez nem mindig igaz .
Proba !![#nemtudom]
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 05, 23:19
Írta: jv7pu3a5p Dátum 2010 január 05, 23:19
Keri,
Gondolom hajtottad már MACH3mal a léptecseket. Nem vetted észre hogy szabálytalanul működne? Azért kéredem tőled mert Te ugyanúgy megszakításban léptetsz, tehát a MACH3 pontos időzítésén múlik a léptetés. Nálam néha vannak kis zörejek, néha ki is esik a fázisól sajna. 1 napot csesztem el mire, gynakodni kezdtem a PCre. A vezérlőmmel mérem a step jelek idejét és igencsak ingadozik. Mikor raktam rá egy kontrollerrel generált stabíl step jelet jól futott, úgyhogy csak a PC vagy MACH3 lehet, de még kisérletezek. Nálad hasonló???
Gondolom hajtottad már MACH3mal a léptecseket. Nem vetted észre hogy szabálytalanul működne? Azért kéredem tőled mert Te ugyanúgy megszakításban léptetsz, tehát a MACH3 pontos időzítésén múlik a léptetés. Nálam néha vannak kis zörejek, néha ki is esik a fázisól sajna. 1 napot csesztem el mire, gynakodni kezdtem a PCre. A vezérlőmmel mérem a step jelek idejét és igencsak ingadozik. Mikor raktam rá egy kontrollerrel generált stabíl step jelet jól futott, úgyhogy csak a PC vagy MACH3 lehet, de még kisérletezek. Nálad hasonló???
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 január 05, 23:22
Írta: keri Dátum 2010 január 05, 23:22
őőőő, a tuning tényező a vezérlő paramétere nem?
A vezérlőt meg olyat csinálok amilyenre szükségem van...most a fejembe vettem hogy legalább 100Vig működőképes legyen, hogy bírja a nagy fordulatot a motorom...ami sajnos elég nagy indukciójú.
De nem is ez a problémám, engem csak az aggaszt hogy a tekercsek zománcozása ne égjen át a nagy feszültségtől.
Az csak megvan határozva, nem?
Mennyi szokott lenni?
A vezérlőt meg olyat csinálok amilyenre szükségem van...most a fejembe vettem hogy legalább 100Vig működőképes legyen, hogy bírja a nagy fordulatot a motorom...ami sajnos elég nagy indukciójú.
De nem is ez a problémám, engem csak az aggaszt hogy a tekercsek zománcozása ne égjen át a nagy feszültségtől.
Az csak megvan határozva, nem?
Mennyi szokott lenni?
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 05, 23:25
Írta: jv7pu3a5p Dátum 2010 január 05, 23:25
Hát 90V-os vezérlők vannak...
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 január 05, 23:35
Írta: keri Dátum 2010 január 05, 23:35
Igen. Ugyan ez. Én mondjuk azonnal rájöttem, mivel a vezérlőbe elsőnek mindig egy öntesztelő programot rakok, ami saját órajele alapján forgatja a motort.
Miután a saját órajel szerint tökéletesen futott, a step/dir vezérlés működését egy BASIC programmal teszteltem, ami DOS alatt tökéletes időzítésű jeleket ad, és ezzel is hibátlan volt.
Ezek után a MACH-el lépésvesztés és indokolatlan rezonanciák léptek fel bizonyos fordulatokon, tehát tudtam hogy nem jó a jel.
Kisebb sebességeken használtam, ott ez nem okozott gondot, de jól megszívtam amikor egyszerre két tengelyt akartam mozgatni és ekkor a leg lassabb mozgás mellet is lépést vesztett, és a mozgatott köszörű jól belemart a munkadarabba.
Aztán visszatértem a DOS-ra, mert ott nincs korlátozás a Gkódra :)
Egyébként furcsa, mert amikor először próbálkoztam a MACH-el, akkor gond nélkül lerajzolta István összes tesztábráját a motorok képességei szerint, ugyan ezzel a kis teljesítményű notebookkal.
Ezért én arra gondoltam nem a MACH a rossz, hanem a windows frissítések. Ha egyszer használni akarom a MACH-et akkor WIN2000-est fogok felrakni, mert az stabilabb....de valójában az a tervem, hogy hardveres vezérlőt csinálok, mert azzal jobb dolgokat is meg tudok csinálni mint a MACH-el.
Miután a saját órajel szerint tökéletesen futott, a step/dir vezérlés működését egy BASIC programmal teszteltem, ami DOS alatt tökéletes időzítésű jeleket ad, és ezzel is hibátlan volt.
Ezek után a MACH-el lépésvesztés és indokolatlan rezonanciák léptek fel bizonyos fordulatokon, tehát tudtam hogy nem jó a jel.
Kisebb sebességeken használtam, ott ez nem okozott gondot, de jól megszívtam amikor egyszerre két tengelyt akartam mozgatni és ekkor a leg lassabb mozgás mellet is lépést vesztett, és a mozgatott köszörű jól belemart a munkadarabba.
Aztán visszatértem a DOS-ra, mert ott nincs korlátozás a Gkódra :)
Egyébként furcsa, mert amikor először próbálkoztam a MACH-el, akkor gond nélkül lerajzolta István összes tesztábráját a motorok képességei szerint, ugyan ezzel a kis teljesítményű notebookkal.
Ezért én arra gondoltam nem a MACH a rossz, hanem a windows frissítések. Ha egyszer használni akarom a MACH-et akkor WIN2000-est fogok felrakni, mert az stabilabb....de valójában az a tervem, hogy hardveres vezérlőt csinálok, mert azzal jobb dolgokat is meg tudok csinálni mint a MACH-el.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 05, 23:35
Írta: s7manbs8 Dátum 2010 január 05, 23:35
A Mach nem egyenletes jelet ad ki.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 05, 23:37
Írta: jv7pu3a5p Dátum 2010 január 05, 23:37
Ezt találtam egy léptecs adatlapban:
Dielectric strength : 500 Vdc
Szigetelési ellenállás : 100 Mohm ( 500 Vdc )
Dielectric strength : 500 Vdc
Szigetelési ellenállás : 100 Mohm ( 500 Vdc )
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 január 05, 23:37
Írta: keri Dátum 2010 január 05, 23:37
Kösz, akkor ehhez tartom magam én is.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 05, 23:43
Írta: jv7pu3a5p Dátum 2010 január 05, 23:43
A jó életbe, akkor mégse vagyok hülye. De mégis sokan használják a MACH3at, vagy lehet hogy a vezérlők kiszűrik az egyenletlen jeleket. Már én is ezen gondolkodtam.
Saját vezérlő nekem tervben van, mert van egy standard touch LCDm, amit a házrendszerenmbe terveztem. Arra gondoltam, hogy írok egy kis progit és PC nélkül tudok egyszerűbb dolgokat marni. Meg akár Gkódot is futtatni.
Az a DOSos progi publikus, esetleg elküldenéd a mailemre?
Saját vezérlő nekem tervben van, mert van egy standard touch LCDm, amit a házrendszerenmbe terveztem. Arra gondoltam, hogy írok egy kis progit és PC nélkül tudok egyszerűbb dolgokat marni. Meg akár Gkódot is futtatni.
Az a DOSos progi publikus, esetleg elküldenéd a mailemre?
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 január 05, 23:43
Írta: keri Dátum 2010 január 05, 23:43
Király, akkor nem is kell trafó, csak egyenirányítom a 220-at :))))))))))))))
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 05, 23:45
Írta: jv7pu3a5p Dátum 2010 január 05, 23:45
ja és nálam is egyszer jó a MACH3 hiba nélkül megy, másszor meg teljesen megbolondul.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 05, 23:48
Írta: s7manbs8 Dátum 2010 január 05, 23:48
Dehogy szűrik, más is szptt már ezzel.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 január 05, 23:50
Írta: besirkyjh Dátum 2010 január 05, 23:50
A laptopal vigyázni kicsit mert nemaz igazi ( van olyan ami hibátlan ) .István irt egy XP telepitési verziot ( direkt laptopra ) azt olvassátok el . Nálam a nagyPc-is ugy van telepitve , bár eddigsem vot vele bajom ( de laptopnál biztos használ ).
A tuning tényezö az sok mindentöl függ , de a kezdetek kezdetén volt egy olyan elmélet ( szokás ) hogy a motorra ráitr feszültség 25 szöröséig lehet tuningolni a léptetöket .Azota tudjuk hogy ez nem mindig igaz .
Nalám a legnagyobb feszültség 63V volt amit egy 4V-os motorra adtam ( 63 V a vezérlö tápja ) nem ártott neki de nem is használt .
A nagyobb feszültségnek szerinten 7-10V közötti motoroknál van értelme csak az áramra vigyázni kell .Volt már a kezemben 24V motor is ( nemtudtam használni) ezért áttekercseltem , Mosz a 24V-bol 1.7V és 1.5A lett igy már forog rendesen egy sima 24V-osvezérlövel is .
Hogy én mennyit tudok irni .
[#crazya]
A tuning tényezö az sok mindentöl függ , de a kezdetek kezdetén volt egy olyan elmélet ( szokás ) hogy a motorra ráitr feszültség 25 szöröséig lehet tuningolni a léptetöket .Azota tudjuk hogy ez nem mindig igaz .
Nalám a legnagyobb feszültség 63V volt amit egy 4V-os motorra adtam ( 63 V a vezérlö tápja ) nem ártott neki de nem is használt .
A nagyobb feszültségnek szerinten 7-10V közötti motoroknál van értelme csak az áramra vigyázni kell .Volt már a kezemben 24V motor is ( nemtudtam használni) ezért áttekercseltem , Mosz a 24V-bol 1.7V és 1.5A lett igy már forog rendesen egy sima 24V-osvezérlövel is .
Hogy én mennyit tudok irni .
[#crazya]
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 05, 23:56
Írta: jv7pu3a5p Dátum 2010 január 05, 23:56
Hát ez remek...
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 január 05, 23:57
Írta: keri Dátum 2010 január 05, 23:57
Jó az a MACH, régen nem voltak ilyen gondjaim vele, én a windows agybajára gondoltam.
Valaki írta hogy a kernel frekvencia helyes kiválasztásával halál pontos jeleket kapott, tehát ezt javaslom neked is.
Ezen felül szűz XP telepítést is javaslok, amire nem raksz fel SP1-nél többet. Az SP2-vel már jelentős lassulási gondjaim voltak, az SP3-al pedig teljesen behalt az öreg notim.
Ja és kapcsolj ki minden felesleges szolgáltatást.
QBASIC-ben van amit forrásból lehet futtatni. Elvileg be lehet fordítani EXE-be de soha nem próbáltam, mert a program közvetlenül tartalmazza a mozgásokat. Nem kezeltem vele Gkódot.
Elvileg lehetne, de nem merült fel ilyen igény, mert a BASIC több lehetőséget biztosít mint a Gkód és nem is bonyolultabb.
Ezért mindig adott használatra írom, nem szoktam elrakni hosszútávra.
Simán FOR-NEXT ciklusokkal megfelelően késleltetve kapcsolgatom a printerportot. Ennyi a program lényege.
Ha nem ismered a régi BASIC-et akkor írok a kívánságod szerint egy progit, ha szeretnéd akkor tudok olyat hogy alapvető Gkódokat tudjon kezelni, de arra vannak elég jó DOS-os CNC vezérlők amik szintén pontosak.
Valaki írta hogy a kernel frekvencia helyes kiválasztásával halál pontos jeleket kapott, tehát ezt javaslom neked is.
Ezen felül szűz XP telepítést is javaslok, amire nem raksz fel SP1-nél többet. Az SP2-vel már jelentős lassulási gondjaim voltak, az SP3-al pedig teljesen behalt az öreg notim.
Ja és kapcsolj ki minden felesleges szolgáltatást.
QBASIC-ben van amit forrásból lehet futtatni. Elvileg be lehet fordítani EXE-be de soha nem próbáltam, mert a program közvetlenül tartalmazza a mozgásokat. Nem kezeltem vele Gkódot.
Elvileg lehetne, de nem merült fel ilyen igény, mert a BASIC több lehetőséget biztosít mint a Gkód és nem is bonyolultabb.
Ezért mindig adott használatra írom, nem szoktam elrakni hosszútávra.
Simán FOR-NEXT ciklusokkal megfelelően késleltetve kapcsolgatom a printerportot. Ennyi a program lényege.
Ha nem ismered a régi BASIC-et akkor írok a kívánságod szerint egy progit, ha szeretnéd akkor tudok olyat hogy alapvető Gkódokat tudjon kezelni, de arra vannak elég jó DOS-os CNC vezérlők amik szintén pontosak.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 05, 23:58
Írta: jv7pu3a5p Dátum 2010 január 05, 23:58
Laptopról megy, gondoltam, hogy esetleg problémás lehet. Csak a nagy gépen WIN7 van, azon meg asszem nem megy, de majd kipróbálom.
Megnézem ez a telepítés dolgot, köszi.
Megnézem ez a telepítés dolgot, köszi.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 január 06, 00:06
Írta: keri Dátum 2010 január 06, 00:06
Nálam nem írsz úgysem többet :)
Természetesen megfelelően méretezett áramkorlátozással terveztem a nagyfeszültséget ráadni, mert úgy tapasztaltam hogy a nagyobb meghajtó feszültség mellett kisebb konstans áram is elég volt ugyan ahhoz a forgó nyomatékhoz, ami persze kisebb melegedést is eredményezett, szóval ha már lehet akkor jó volna kihasználni amit bír a motor.
Természetesen megfelelően méretezett áramkorlátozással terveztem a nagyfeszültséget ráadni, mert úgy tapasztaltam hogy a nagyobb meghajtó feszültség mellett kisebb konstans áram is elég volt ugyan ahhoz a forgó nyomatékhoz, ami persze kisebb melegedést is eredményezett, szóval ha már lehet akkor jó volna kihasználni amit bír a motor.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 06, 00:08
Írta: jv7pu3a5p Dátum 2010 január 06, 00:08
Húzok újra egy XPt próbára. Eddig is próbáltam mindent kikapcsolni, meg a kernel frekivel is játszottam már. 25000Hz-en szinte nem is ment, most 60000 van.
Köszi, ne írj progit azért, keresek majd a neten akkor. Félreértetem azt hittem te is valami ilyet használsz.
Az LCDm a legjobb amúgy, atom pontos időzítés jön ki belőle, lehet tényleg építek rá egy kis programot. Van SD kártya olvasó is rajta, PCn megcsinálja az ember a G kódot akármivel, az meg lefuttatja. Huh, jó kis meló lenne...
Köszi, ne írj progit azért, keresek majd a neten akkor. Félreértetem azt hittem te is valami ilyet használsz.
Az LCDm a legjobb amúgy, atom pontos időzítés jön ki belőle, lehet tényleg építek rá egy kis programot. Van SD kártya olvasó is rajta, PCn megcsinálja az ember a G kódot akármivel, az meg lefuttatja. Huh, jó kis meló lenne...
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 január 06, 00:10
Írta: keri Dátum 2010 január 06, 00:10
Basszus, most jut eszembe, hogy van egy olyan funkció a notimban, hogy visszaveszi az órajelet a terhelés függvényében. Hát persze hogy meghülyül a MACH, ha folyamatosan kapcsolgatja a rendszer frekvenciát. Régen ezt a funkciót kikapcsoltam, de ahogy kezdett gyengülni az akku bekapcsoltam hogy tovább bírja.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 06, 00:12
Írta: s7manbs8 Dátum 2010 január 06, 00:12
Bele ne kezdjél én már 5 éve azt írom... Nem kis meló az hidd el. [#circling][#circling]
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 január 06, 00:20
Írta: besirkyjh Dátum 2010 január 06, 00:20
Na ugye.
A motor tuningnál a nyomaték már másodlagos az már a nyomatékon tul van .
Inkább csak afordulatba szol bele , persze ezzel eltolja a nyomaték görbét is , de akkor is van egy maximumja minden mitornak .Azon felül csak höre megy a játék .
Azt hiszem valami olyasmit ir az István hogy "satndard Pc" nek kell telepiteni az XP-t .
Mégegyszer mondom laptophoz csinálta igy .
A motor tuningnál a nyomaték már másodlagos az már a nyomatékon tul van .
Inkább csak afordulatba szol bele , persze ezzel eltolja a nyomaték görbét is , de akkor is van egy maximumja minden mitornak .Azon felül csak höre megy a játék .
Azt hiszem valami olyasmit ir az István hogy "satndard Pc" nek kell telepiteni az XP-t .
Mégegyszer mondom laptophoz csinálta igy .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 január 06, 07:13
Írta: 000000000 Dátum 2010 január 06, 07:13
A 25×-ös tuningtényező nem szabály, én ilyet sosem állítottam! Egyszerűen a H1-es Vezérlőmön kimért határérték! Persze, hogy lehet ettől magasabb vezérlőt csinálni, csak egyre nehezebb (A Choppernek nagy átfogásúnak kell lennie és a freki-fesz emelésével a FET-ek disszipációja rohamosan emelkedik).
Egy javaslat a "kapcsolgatós" vezérlőknél: teszteljétek lépésvesztésre pont a kapcsolási frekin járatva! Meggyőződésem, ha nem tesztek bele védelmet (pl. hiszterézist, tört osztások kezelése), gond lesz!
A Mach-ot ne hibáztassátok, mert minden "normálos" vezérlő (legyen az léptecs, vagy servo) hibátlanul működik vele (a nem etalon időzítései ellenére is)!!!
Egy javaslat a "kapcsolgatós" vezérlőknél: teszteljétek lépésvesztésre pont a kapcsolási frekin járatva! Meggyőződésem, ha nem tesztek bele védelmet (pl. hiszterézist, tört osztások kezelése), gond lesz!
A Mach-ot ne hibáztassátok, mert minden "normálos" vezérlő (legyen az léptecs, vagy servo) hibátlanul működik vele (a nem etalon időzítései ellenére is)!!!
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 január 06, 08:14
Írta: besirkyjh Dátum 2010 január 06, 08:14
Szia István
Direkt nemirtam hogy "itt a forumon" mert nem csak itt lehetet olvasni a 25-ös számot ( de hát végül is támpontnak tökéletes ) .
Szerintem mindeggyiket meg lehet hajtani a névleges fesz sokszorosával , de van egy határ amikor már csak adjuk a feszültséget de nemkapunk semmi cserébe a motortol ( csak höt )
[#fejvakaras][#smile]
Direkt nemirtam hogy "itt a forumon" mert nem csak itt lehetet olvasni a 25-ös számot ( de hát végül is támpontnak tökéletes ) .
Szerintem mindeggyiket meg lehet hajtani a névleges fesz sokszorosával , de van egy határ amikor már csak adjuk a feszültséget de nemkapunk semmi cserébe a motortol ( csak höt )
[#fejvakaras][#smile]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 január 06, 08:42
Írta: 000000000 Dátum 2010 január 06, 08:42
Próbáld ki! Elkezded emelni a feszültséget és egyszer csak a Choppered nem lesz képes elég rövid és meredek tüskéket generálni, innentől a motor teljesítmény szabályzása megszűnik és minden + feszültségemelés a felvett látszólagost fogja emelni ami = fűtés. És ez csak a Chopper oldala (még ehhez jön a teljesítmény fokozat disszipációja is)...
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 január 06, 08:58
Írta: besirkyjh Dátum 2010 január 06, 08:58
Ezeken a probákon már tul vagyok elég régen .
Meg áltam az 1000 körüli fordulatnál ott még nemcsalodtam .
Csak azt probáltam a Kerinek "ecsetelni " hogy minek az a nagy fesz , amelyik léptetönek 100V körüli feszültség kell ott szerintem valami hiba van , de az hogy nem optimális egy Hobby CNC-he zaz biztos .
Egy 3.1Nm motorral szaladtam bele én ebbe a feszemelés dologba .Annyira biztos voltam a dolgomba ( hogy kicsi a motortáp ) hogy vettem egy rahedli MSD-70 vezérlö 63V ig mentem a táppal és a vége az lett hogy vissza került a régi MSD-50 re és 40V lett a tápja .
[#ejnye1][#smile]
Meg áltam az 1000 körüli fordulatnál ott még nemcsalodtam .
Csak azt probáltam a Kerinek "ecsetelni " hogy minek az a nagy fesz , amelyik léptetönek 100V körüli feszültség kell ott szerintem valami hiba van , de az hogy nem optimális egy Hobby CNC-he zaz biztos .
Egy 3.1Nm motorral szaladtam bele én ebbe a feszemelés dologba .Annyira biztos voltam a dolgomba ( hogy kicsi a motortáp ) hogy vettem egy rahedli MSD-70 vezérlö 63V ig mentem a táppal és a vége az lett hogy vissza került a régi MSD-50 re és 40V lett a tápja .
[#ejnye1][#smile]
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 06, 10:56
Írta: jv7pu3a5p Dátum 2010 január 06, 10:56
Én nem akarom hibáztatni a MACH3-at, de valami van az tuti. Újra kell huznom az OP rendszert, hátha.
Nézzétek meg ezt küldi kifelé a vezérlőm:
Sorszám Áram(mA) Hőfok PWMértéke STEPideje(uS)
ú65. I:790 42°C 182 Ido:168
ú66. I:733 42°C 182 Ido:168
ú67. I:733 42°C 182 Ido:168
ú68. I:771 42°C 182 Ido:168
ú69. I:771 42°C 182 Ido:168
ú70. I:771 43°C 182 Ido:169
ú71. I:771 42°C 183 Ido:181
ú72. I:809 43°C 183 Ido:401
ę73. I:752 42°C 183 Ido:168
ú74. I:752 43°C 174 Ido:181
ú75. I:865 42°C 174 Ido:168
ú76. I:733 43°C 174 Ido:168
ú77. I:733 42°C 174 Ido:168
ú78. I:790 42°C 174 Ido:168
ú79. I:790 43°C 174 Ido:181
ú80. I:790 42°C 174 Ido:168
Nem csináltam mást mint F1000 és G1 X0-val elküldtem nullába.
Lehet látni a STEP időben a kakukktojást, a duplája a többihez képest. Mondanom se kell, hogy megállt a motor. És ez menet közben bármikor előjön a legváratlanabb pillanatban.
Nézzétek meg ezt küldi kifelé a vezérlőm:
Sorszám Áram(mA) Hőfok PWMértéke STEPideje(uS)
ú65. I:790 42°C 182 Ido:168
ú66. I:733 42°C 182 Ido:168
ú67. I:733 42°C 182 Ido:168
ú68. I:771 42°C 182 Ido:168
ú69. I:771 42°C 182 Ido:168
ú70. I:771 43°C 182 Ido:169
ú71. I:771 42°C 183 Ido:181
ú72. I:809 43°C 183 Ido:401
ę73. I:752 42°C 183 Ido:168
ú74. I:752 43°C 174 Ido:181
ú75. I:865 42°C 174 Ido:168
ú76. I:733 43°C 174 Ido:168
ú77. I:733 42°C 174 Ido:168
ú78. I:790 42°C 174 Ido:168
ú79. I:790 43°C 174 Ido:181
ú80. I:790 42°C 174 Ido:168
Nem csináltam mást mint F1000 és G1 X0-val elküldtem nullába.
Lehet látni a STEP időben a kakukktojást, a duplája a többihez képest. Mondanom se kell, hogy megállt a motor. És ez menet közben bármikor előjön a legváratlanabb pillanatban.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 január 06, 11:01
Írta: 000000000 Dátum 2010 január 06, 11:01
A DriverTeszt mit mutat?
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 06, 11:13
Írta: jv7pu3a5p Dátum 2010 január 06, 11:13
Azt hogyan is tudom?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 január 06, 11:16
Írta: 000000000 Dátum 2010 január 06, 11:16
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 január 06, 11:25
Írta: keri Dátum 2010 január 06, 11:25
8V-tól már megy, de a labortápom szabályozható 30V-ig és azt vettem észre hogy jelentősen javulnak a motor képességei a feszültség növelésével.
Az áramot is a labortáppal korlátoztam és egy összetákolt fetes meghajtással kapcsolgattam a tekercseket.
Most 45V-os tápot csináltam hozzá, de ezzel még nem tudtam használni mert nem működik még az áramszabályzós vezérlőm. (felrobbannak az IC-k 800mA felett valami tranziens visszacsatolás
Nézegettem a FET-eket és a szimpatikus típusok között van 55V-os ami jó ehhez a táphoz, és van 100V-os. Ez nem járna nagyobb költséggel és mivel tudom hogy a fesz növelés jó, ezért érdekelt hogy mi a maximum amit még érdemes a motorra adni.
Az áramot is a labortáppal korlátoztam és egy összetákolt fetes meghajtással kapcsolgattam a tekercseket.
Most 45V-os tápot csináltam hozzá, de ezzel még nem tudtam használni mert nem működik még az áramszabályzós vezérlőm. (felrobbannak az IC-k 800mA felett valami tranziens visszacsatolás
Nézegettem a FET-eket és a szimpatikus típusok között van 55V-os ami jó ehhez a táphoz, és van 100V-os. Ez nem járna nagyobb költséggel és mivel tudom hogy a fesz növelés jó, ezért érdekelt hogy mi a maximum amit még érdemes a motorra adni.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 06, 11:27
Írta: jv7pu3a5p Dátum 2010 január 06, 11:27
Hát a driver testnél felváltva egyenes vonal aztán meg zavaros jelek(mint nálad a képen). Gondolom szép simának kell lennie folyamatosan. Ezt a telepítés dolgot meg kipróbálom.
Köszi
Köszi
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 január 06, 11:28
Írta: keri Dátum 2010 január 06, 11:28
Ja és a Mach nekem is azt csinálja hogy megy normálisan, majd megtorpan kb 100msec-re, ami az üresjáratban garantált csúszást okoz, hiszen nem képes a motor ilyen hirtelen lassulásra és indulásra.
De nem hibáztatom a Mach-et mert régebben nem csinált ilyet és nem cseréltem még verziót azóta. Inkább a windowst hibáztatom, ezért fogok telepíteni egy régebbi verziót, mivel másra úgy sem használom ezt a notit.
De nem hibáztatom a Mach-et mert régebben nem csinált ilyet és nem cseréltem még verziót azóta. Inkább a windowst hibáztatom, ezért fogok telepíteni egy régebbi verziót, mivel másra úgy sem használom ezt a notit.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 január 06, 11:31
Írta: keri Dátum 2010 január 06, 11:31
Köszönöm, ez hasznos lesz.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 január 06, 13:49
Írta: besirkyjh Dátum 2010 január 06, 13:49
Szia
Használd a 100V-os fettet mert most is vannak ott 100V körüli feszültségek ( impulzusban ) .Ezeket kéne a párhuzamos diodáknak levágni ( motor tekercsel párhuzamos ) .
Használd a 100V-os fettet mert most is vannak ott 100V körüli feszültségek ( impulzusban ) .Ezeket kéne a párhuzamos diodáknak levágni ( motor tekercsel párhuzamos ) .
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 06, 14:56
Írta: jv7pu3a5p Dátum 2010 január 06, 14:56
Remélem nem kiabálom el,
Újratelepítettem a laptopot István ajánlásával, nos a gép sosem votl ilyen gyors csak úgy dobálja be az ablakokat a Windows. Hihetetlen (256Mb RAM).
Megnéztem a MACH3 driver tesztjét, ott jót mutatott. Aztán teszteltem egy 5 percig motorral is és eddig nem volt időhiba, vagy legalábbis nem vettem észre. És sokkal stabilabb is a freki, alig ingadozik, íme:
ę75. I:809 55°C 165 Ido:352
ę76. I:715 55°C 166 Ido:352
ę77. I:733 56°C 163 Ido:352
ę78. I:865 56°C 164 Ido:352
Ę79. I:715 56°C 164 Ido:352
ę80. I:903 55°C 163 Ido:352
ę81. I:696 55°C 165 Ido:352
ę82. I:696 56°C 165 Ido:352
ę83. I:903 56°C 165 Ido:352
Ę84. I:752 56°C 164 Ido:352
ę85. I:827 56°C 164 Ido:352
ę86. I:733 56°C 166 Ido:352
ę87. I:733 56°C 165 Ido:352
ę88. I:790 56°C 166 Ido:352
ę89. I:752 56°C 166 Ido:352
Ę90. I:846 56°C 166 Ido:352
ę91. I:733 56°C 165 Ido:351
ę92. I:715 55°C 164 Ido:352
ę93. I:884 56°C 165 Ido:352
ę94. I:771 56°C 166 Ido:352
Ę95. I:827 56°C 163 Ido:352
ę96. I:677 56°C 165 Ido:352
ę97. I:978 56°C 164 Ido:352
ę98. I:921 56°C 163 Ido:352
ę99. I:696 56°C 165 Ido:352
Majdhogynem meg sem mozdul az "Ido". Pedig ez mikrosecundum.
Újratelepítettem a laptopot István ajánlásával, nos a gép sosem votl ilyen gyors csak úgy dobálja be az ablakokat a Windows. Hihetetlen (256Mb RAM).
Megnéztem a MACH3 driver tesztjét, ott jót mutatott. Aztán teszteltem egy 5 percig motorral is és eddig nem volt időhiba, vagy legalábbis nem vettem észre. És sokkal stabilabb is a freki, alig ingadozik, íme:
ę75. I:809 55°C 165 Ido:352
ę76. I:715 55°C 166 Ido:352
ę77. I:733 56°C 163 Ido:352
ę78. I:865 56°C 164 Ido:352
Ę79. I:715 56°C 164 Ido:352
ę80. I:903 55°C 163 Ido:352
ę81. I:696 55°C 165 Ido:352
ę82. I:696 56°C 165 Ido:352
ę83. I:903 56°C 165 Ido:352
Ę84. I:752 56°C 164 Ido:352
ę85. I:827 56°C 164 Ido:352
ę86. I:733 56°C 166 Ido:352
ę87. I:733 56°C 165 Ido:352
ę88. I:790 56°C 166 Ido:352
ę89. I:752 56°C 166 Ido:352
Ę90. I:846 56°C 166 Ido:352
ę91. I:733 56°C 165 Ido:351
ę92. I:715 55°C 164 Ido:352
ę93. I:884 56°C 165 Ido:352
ę94. I:771 56°C 166 Ido:352
Ę95. I:827 56°C 163 Ido:352
ę96. I:677 56°C 165 Ido:352
ę97. I:978 56°C 164 Ido:352
ę98. I:921 56°C 163 Ido:352
ę99. I:696 56°C 165 Ido:352
Majdhogynem meg sem mozdul az "Ido". Pedig ez mikrosecundum.
Cím: Re:Léptetőmotor
Írta: SquirrelTech Dátum 2010 január 06, 15:07
Írta: SquirrelTech Dátum 2010 január 06, 15:07
Én nyáron telepítettem újra, hasonló okok miatt a rendszert(nem mértem ilyen pontossággal, csak néha igen furcsán "rángatott"). Azóta jó... Szóval lehet, hogy nálad is így marad. :)
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 január 06, 16:16
Írta: besirkyjh Dátum 2010 január 06, 16:16
Ha már nekem nem hiszel .
Jo lessz , biztos vagyok benne .
Ügyes a Pityubácsi hogy ezt igy közre adta.
[#eljen]
Jo lessz , biztos vagyok benne .
Ügyes a Pityubácsi hogy ezt igy közre adta.
[#eljen]
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 06, 16:48
Írta: jv7pu3a5p Dátum 2010 január 06, 16:48
Bocsánat, hittem neked csak halogattam a telepítést. Aztán István belinkelte az oldalt és döntöttem rögtön. :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 január 06, 19:07
Írta: 000000000 Dátum 2010 január 06, 19:07
[#eljen]
Cím: Re:Léptetőmotor
Írta: sanyi84 Dátum 2010 január 06, 19:44
Írta: sanyi84 Dátum 2010 január 06, 19:44
Én csak szabványos pc-t telepítettem fel, wint azt nem. Nekem egy fekete csík volt az aminek vonalnak kellene lennie. Most is van pici tüske (tényleg pici) de nem akkora, viszont az ellenállás kiforrasztotta magát az 5 fázisú léptető vezérlőből addig nyúztam, ereje így unipolárisan nincs, lépést is veszt.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 január 06, 19:59
Írta: keri Dátum 2010 január 06, 19:59
megnéztem én is, viszonylag sima, de van pár irtózatos nagy tüske. Végülis a diagnosztika alátámasztotta a tapasztalatomat, hogy akad.
Majd újrahúzom én is, jelenleg az 5. vezérlő IC-t robbantottam fel, szóval tárgytalan a MACH akadása [#falbav][#violent]
Majd újrahúzom én is, jelenleg az 5. vezérlő IC-t robbantottam fel, szóval tárgytalan a MACH akadása [#falbav][#violent]
Cím: Re:Léptetőmotor
Írta: 0gbwyh99 Dátum 2010 január 06, 20:54
Írta: 0gbwyh99 Dátum 2010 január 06, 20:54
Ha valaki "csak" Mach-hoz használja a gépét annak javaslom a "Tiny Xp"- vagy a "Mikro Xp"-t !! Az utóbbi 80MB-os ISO (200 MB feltelepítve) és tényleg ki van herélve belőle minden felesleges sallang . Direkt lassú gépekhez van kitalálva . Keri ! Töltsed le net-röl és előbb avval próbáld .
Cím: Re:Léptetőmotor
Írta: 0gbwyh99 Dátum 2010 január 06, 20:55
Írta: 0gbwyh99 Dátum 2010 január 06, 20:55
Nem "Mikro Xp" hanem "Micro Xp" ! [#falbav]
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 06, 22:56
Írta: s7manbs8 Dátum 2010 január 06, 22:56
Csak meg kellene pörgetni a nagyobb táppal a léptetőt, addig nem fórumozok amíg nem megy. Remélem 10perc múlva jöhetek vissza... [#circling][#circling]
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 január 07, 00:25
Írta: keri Dátum 2010 január 07, 00:25
Próbáltam, valamiért nem működött, pedig szerettem volna.
Azt akartam hogy 2Gigás CF memóriát tettem a HDD helyére. A sima XP-vel ment a Micro XP nem valami hibával el sem indult.
Azt akartam hogy 2Gigás CF memóriát tettem a HDD helyére. A sima XP-vel ment a Micro XP nem valami hibával el sem indult.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 07, 00:35
Írta: s7manbs8 Dátum 2010 január 07, 00:35
Most már megy 43V-tal 500-zal még van ereje, tegnap ugyanígy olyan 250-et bírt. Lehetne még nagyob fesz neki, igencsak de arányosan ez vagy 100V-tal menne 1000-rel ?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 07, 00:38
Írta: s7manbs8 Dátum 2010 január 07, 00:38
Holnap egy nagyobb hűtőbordával megnézem meg kicsit több áram kell még neki.
Cím: Re:Léptetőmotor
Írta: 0gbwyh99 Dátum 2010 január 07, 08:12
Írta: 0gbwyh99 Dátum 2010 január 07, 08:12
Hát igen , mint mondtam , ki van herélve belőle minden sallang (és azok közt sok DLL is) , de "normális" HDD-s gépeken jó , főleg olyanon ahol csak Mach-t használunk meg egy pár apróságot !!
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 január 07, 08:52
Írta: besirkyjh Dátum 2010 január 07, 08:52
Szia
Szeretném kiprobálni ez a Micro Xp dolgot , honnan kell letölteni ? Nézem a NET-en de egy csomo hülyeség jön csak .
Valami tipp ?
[#integet2]
Szeretném kiprobálni ez a Micro Xp dolgot , honnan kell letölteni ? Nézem a NET-en de egy csomo hülyeség jön csak .
Valami tipp ?
[#integet2]
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 január 07, 10:19
Írta: keri Dátum 2010 január 07, 10:19
Én torrentről szedtem le.
Van hivatalos oldala, honnan legális XP birtokában lehet használni de nem sikerült rájönni hogyan. Igaz nekem a torrentes sem működött, de ott a flash driveval voltak gubancok.
Van hivatalos oldala, honnan legális XP birtokában lehet használni de nem sikerült rájönni hogyan. Igaz nekem a torrentes sem működött, de ott a flash driveval voltak gubancok.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 január 07, 10:20
Írta: besirkyjh Dátum 2010 január 07, 10:20
Szia Keri
Akkor nem is olyan egyszerü?
Akkor nem is olyan egyszerü?
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 január 07, 10:23
Írta: keri Dátum 2010 január 07, 10:23
A torrentes az egyszerű :)
Kalózkikötőn fent van.
Kalózkikötőn fent van.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 január 07, 21:07
Írta: besirkyjh Dátum 2010 január 07, 21:07
Szia
Közben bövitettem a kapcsolataimat és megoldodni látszik a herélt verzio .
[#eljen][#rolleyes]
Közben bövitettem a kapcsolataimat és megoldodni látszik a herélt verzio .
[#eljen][#rolleyes]
Cím: Re:Léptetőmotor
Írta: 0gbwyh99 Dátum 2010 január 07, 22:41
Írta: 0gbwyh99 Dátum 2010 január 07, 22:41
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 január 07, 23:09
Írta: besirkyjh Dátum 2010 január 07, 23:09
Türelem az van .
36K-val mint állat jön .
Köszönöm ,reggel teszem szüz gépre ( P-III 800Mhz ) akkor ez már brutál?
[#worship]
36K-val mint állat jön .
Köszönöm ,reggel teszem szüz gépre ( P-III 800Mhz ) akkor ez már brutál?
[#worship]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 január 07, 23:17
Írta: 000000000 Dátum 2010 január 07, 23:17
[#worship][#worship][#worship][#taps][#taps][#taps][#worship][#worship][#worship]KÖSZÖNÖM LEJÖTT NEKEM IS NAPOK ÓTA PRÓBÁLKOZTAM... KÖSZÖNÖM
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 január 07, 23:18
Írta: besirkyjh Dátum 2010 január 07, 23:18
22% most
Cím: Re:Léptetőmotor
Írta: KoLa Dátum 2010 január 07, 23:23
Írta: KoLa Dátum 2010 január 07, 23:23
Én már segítek neked töltöm felfelé 88 Mb iso
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 január 07, 23:58
Írta: besirkyjh Dátum 2010 január 07, 23:58
Köszönöm
Ledöngetet 20Kb vel .
meg van !![#csodalk]
Ledöngetet 20Kb vel .
meg van !![#csodalk]
Cím: Re:Léptetőmotor
Írta: cwiw53pw Dátum 2010 január 08, 16:21
Írta: cwiw53pw Dátum 2010 január 08, 16:21
Vettem három kicsi bipoláris léptetőmotort. Mivel tudnám kipróbálni, hogy jók-e?
Astrosyn motorok 2.5V/3.8A kék,sárga,piros,zöld vezetékek lógnak.
Astrosyn motorok 2.5V/3.8A kék,sárga,piros,zöld vezetékek lógnak.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 08, 17:06
Írta: s7manbs8 Dátum 2010 január 08, 17:06
4 vezetékes ?
Cím: Re:Léptetőmotor
Írta: cwiw53pw Dátum 2010 január 08, 17:16
Írta: cwiw53pw Dátum 2010 január 08, 17:16
Igen, kék, sárga, piros, zöld.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 08, 17:18
Írta: s7manbs8 Dátum 2010 január 08, 17:18
PC táp5 V-jával pl. csak körsél sorba egy kis műtrhelést, R=U/I= 2.5/3.8=0.67 Ohm minimum ekkora ellenállást. Ilyet tekerhetsz cekász huzalból, vagy 10 menet pl. egy nagy ellenállás köré, hogy tartása is legyen.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 08, 17:20
Írta: s7manbs8 Dátum 2010 január 08, 17:20
Nézd meg melyik 2-2 tartozik össze 2 darab párban, aztán adhatod nekik sorban a feszt, és ha jó sorrendben adod, akkor szépen sorban fog lépegetni.
Cím: Re:Léptetőmotor
Írta: cwiw53pw Dátum 2010 január 08, 17:22
Írta: cwiw53pw Dátum 2010 január 08, 17:22
Oké. még annyit szeretnék, egy fázisra adjak feszültséget, vagy párhuzamosan 2-re? Nem szeretném, ha elromlana :)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 08, 17:23
Írta: s7manbs8 Dátum 2010 január 08, 17:23
Tűl sok lehetőség nincs, csak 2 eset van.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 08, 17:23
Írta: s7manbs8 Dátum 2010 január 08, 17:23
Elég egy egy tekercsre.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 08, 17:24
Írta: s7manbs8 Dátum 2010 január 08, 17:24
Plusz irány, minusz irány, ugyanez a másikon.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 08, 17:26
Írta: s7manbs8 Dátum 2010 január 08, 17:26
Ha áramot nem tudzs szabályozni, vag ymérni sem ellenállást, először vágsz egy több menetre való cekász huzalt, ha úgy nincs ereje csökkented a hosszát.
Cím: Re:Léptetőmotor
Írta: cwiw53pw Dátum 2010 január 08, 18:31
Írta: cwiw53pw Dátum 2010 január 08, 18:31
Köszi sikerült már lépkednek szépen :)
Kimértem az összetartozó vezetékeket, találtam egy 5V os hálózati trafót azzal próbálgattam óvatosan:) Következő majd ha lesz pénzem egy H2 vezérlő lesz.
Üdv.: Csikin
Kimértem az összetartozó vezetékeket, találtam egy 5V os hálózati trafót azzal próbálgattam óvatosan:) Következő majd ha lesz pénzem egy H2 vezérlő lesz.
Üdv.: Csikin
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 08, 19:02
Írta: jv7pu3a5p Dátum 2010 január 08, 19:02
Nagyjából elkészültem az új elképzelésemmel a léptetőmotor vezélő programjában. Hát mit mondjak, olyan 30%ot kitapostam még a motorokból. A 2Nm mocimnak 2000 fordulaton olyan ereje van még hogy kézzel nem tudtam megfogni, korábban azért sikerült. A gépen is egész jól viszi a 6000mm/min a 3mm orsóval. A nagyobbik 3.1Nm mocinál viszont elfogy a táp (53V).
Itt van két kép a vezérlő setup programjából:
2Nm moci:

3.1Nm moci:

Ki lehet olvasni a diagrammból, hogy a 3.1Nm motornak 700 fordulat környékén már kiakad a PWM, tehát kevés a fesz. Nem is forgott úgy mint a kicsi de az 1000 stabilan viszi gond nélkül.
Ja és ezzel az új vezérlési eljárással még a gyorsításokat is fel tudtam vinni az egekbe. Úgy kell vigyázni nehogy leesen a gép a helyéről. :)))
Itt van két kép a vezérlő setup programjából:
2Nm moci:
3.1Nm moci:
Ki lehet olvasni a diagrammból, hogy a 3.1Nm motornak 700 fordulat környékén már kiakad a PWM, tehát kevés a fesz. Nem is forgott úgy mint a kicsi de az 1000 stabilan viszi gond nélkül.
Ja és ezzel az új vezérlési eljárással még a gyorsításokat is fel tudtam vinni az egekbe. Úgy kell vigyázni nehogy leesen a gép a helyéről. :)))
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 08, 19:40
Írta: s7manbs8 Dátum 2010 január 08, 19:40
Csak nem Linuxban nyomatod ?
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 08, 19:45
Írta: jv7pu3a5p Dátum 2010 január 08, 19:45
Nem. Win7. Eddig bejött. Stabil, gyors. De ezt nem kérdezted :))
Amúgy mit szólsz a vezérlő progihoz? Ezt mondtam 2 napja, hogy meg akarom csinálni. Még a fórumból is kimaradtam miatta.
Mondjuk van még mit formálni rajta.
Amúgy mit szólsz a vezérlő progihoz? Ezt mondtam 2 napja, hogy meg akarom csinálni. Még a fórumból is kimaradtam miatta.
Mondjuk van még mit formálni rajta.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 08, 19:50
Írta: s7manbs8 Dátum 2010 január 08, 19:50
Azzal akartam kezdeni, hogy jól néz ki, de hogy mit csinál nem nagyon értem, az ábrából, ha egy kicsit magyaráznád ?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 08, 19:51
Írta: s7manbs8 Dátum 2010 január 08, 19:51
Motor adatok ?
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 08, 19:57
Írta: jv7pu3a5p Dátum 2010 január 08, 19:57
Még hiányzik a progiból egy két mező, motoradatok, tartóáram stb. Aztán ha ezeket megadod, akkor lesz egy Önkalibrációs gomb. Azt megnyom akkor kb 3-4 percig forgatja a motort és kitölti a bal oldali táblázatot. (Ez már működik csak hiányzik a gomb.) Felveszi a saját áramgörbéjét a fordulatszámhoz. Ha valami nem tetszik a táblázatban át lehet javítani, ezt látni a grafikonon is és fel lehet tölteni a motor vezérlőre. Aztán ebből dolgozik. Mint írtam iszonyat gyors lett tőle.
A grafikon arra jó hogy látni lehessen hol van vége a motornak adott feszültségen, meg hogy milyen step impulzusra milyen PWMet (áramot) kap.
Ja a STEP impulzusok 1600 mikrolépésre vannak. A us oszlopban azt látni.
A grafikon arra jó hogy látni lehessen hol van vége a motornak adott feszültségen, meg hogy milyen step impulzusra milyen PWMet (áramot) kap.
Ja a STEP impulzusok 1600 mikrolépésre vannak. A us oszlopban azt látni.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 08, 21:04
Írta: s7manbs8 Dátum 2010 január 08, 21:04
Jól ki tudod akkor elemezni, nem rossz, sőt jó. A PWM áramokat hogyan méred ?
Cím: Re:Léptetőmotor
Írta: 4um5b65d Dátum 2010 január 08, 21:11
Írta: 4um5b65d Dátum 2010 január 08, 21:11
Csak, hogy azok is értsék akik semmit nem értenek az egészből .... (persze nem magamról beszélek) :)
A szoftver által kalkulált adatokat egy saját, erre kialakított vezérlővel tudod megetetni?
A szoftver által kalkulált adatokat egy saját, erre kialakított vezérlővel tudod megetetni?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 08, 21:13
Írta: s7manbs8 Dátum 2010 január 08, 21:13
A végén szégyenbe maradnak a szervók, nem kell tovább méretezni ! [#circling][#circling]
Cím: Re:Léptetőmotor
Írta: 0gbwyh99 Dátum 2010 január 08, 21:24
Írta: 0gbwyh99 Dátum 2010 január 08, 21:24
Szia!
Mükszik ????????
Mükszik ????????
Cím: Re:Léptetőmotor
Írta: 0gbwyh99 Dátum 2010 január 08, 21:28
Írta: 0gbwyh99 Dátum 2010 január 08, 21:28
fogsz egy ceruzaelemet (1,5V [#vigyor3]) , ráforrasztasz a pólusaira egy egy darab drótot , azzal pöcögteted a motor kivezetéseit .
Cím: Re:Léptetőmotor
Írta: 0gbwyh99 Dátum 2010 január 08, 21:37
Írta: 0gbwyh99 Dátum 2010 január 08, 21:37
Szia!
Csatlakozom Laslie kérdéséhez : ezt a táblázatot belövöd a vezérlődbe és a vezérlő az általad (vagy Mach által) kiválasztott fordulatszám alapján után állítja a többi paramétert ?
Mondjuk lehet olyat csinálni hogy a táblázatból kinézem az adatokat és azokat viszem be a Mach-ba a kívánt fordulatszám után ?
Csatlakozom Laslie kérdéséhez : ezt a táblázatot belövöd a vezérlődbe és a vezérlő az általad (vagy Mach által) kiválasztott fordulatszám alapján után állítja a többi paramétert ?
Mondjuk lehet olyat csinálni hogy a táblázatból kinézem az adatokat és azokat viszem be a Mach-ba a kívánt fordulatszám után ?
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 08, 21:37
Írta: jv7pu3a5p Dátum 2010 január 08, 21:37
Az áramot a főágban mérem egy ACS713 ICvel. Nem túl gyorsan, hagyok neki időt, hogy jól leátlagolja a pontos méréshez. 255 értéket tárolok 0 - max fordulatig. Az áramot meg inkább motorhőfokhoz igazítom, mert akkor tuti a maxot lövi be az ember. Természetesen igen finoman állítható, így egész kicsi motorhoz is hozzáilleszthető, me egész nagyhoz is. :))
Még vannak más ötleteim is, ha lesz időm kipróbálom.
Még vannak más ötleteim is, ha lesz időm kipróbálom.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 08, 21:44
Írta: jv7pu3a5p Dátum 2010 január 08, 21:44
Svertel István, Laslie:
A vezérlő is és a PC-s program is saját fejlesztés, így más vezérlőhöz természetesen nem alkalmazható. USBn kapcsolatban vab a vezérlővel és úgy állítható be(nem DIP kapcsolóval) A MACH3-nak semmi köze a vezérléshez, nem is tud róla mi történik a vezérlőben, szokásosan adja csak a step jeleket. A vezérlő önkalibrációja minden fordulatszámhoz hozzáigazítja az áramot. Mikor jönnek a STEP jelek csak megállapítja a fordulatszámot és a korábban letárolt értéket használja.
A vezérlő is és a PC-s program is saját fejlesztés, így más vezérlőhöz természetesen nem alkalmazható. USBn kapcsolatban vab a vezérlővel és úgy állítható be(nem DIP kapcsolóval) A MACH3-nak semmi köze a vezérléshez, nem is tud róla mi történik a vezérlőben, szokásosan adja csak a step jeleket. A vezérlő önkalibrációja minden fordulatszámhoz hozzáigazítja az áramot. Mikor jönnek a STEP jelek csak megállapítja a fordulatszámot és a korábban letárolt értéket használja.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 08, 22:13
Írta: s7manbs8 Dátum 2010 január 08, 22:13
Akkor most az áramot a processzorral szabályzod, nem analóg chopperrel ? Az ugyanezt csinálja, a beállított fix áramra legalábbis, ha jól értem.
Cím: Re:Léptetőmotor
Írta: 4um5b65d Dátum 2010 január 08, 22:21
Írta: 4um5b65d Dátum 2010 január 08, 22:21
Na erre gondoltam.... Nagyon meg vagyunk veled elégedve. ÜGYES !!!
Már csak piacra kell dobni...
[#taps]
Már csak piacra kell dobni...
[#taps]
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 08, 22:31
Írta: jv7pu3a5p Dátum 2010 január 08, 22:31
Proci csinál mindent. Véleményem szerint azért jobb ez a megoldást mert nem áramgenerátoros üzemben van hajtva a motor, akár többet is kaphat így, ha nagyobb a terhelés. A gyorsulás alatt még túl is van hajtva a motor, ezért is sikerült feljebb tornásznom a gyorsulást. Holnap csinálok megint videókat, ha időm engedi.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 08, 22:34
Írta: jv7pu3a5p Dátum 2010 január 08, 22:34
Köszi. Piacon még nem gondolkoztam, csak magamnak csináltam, de még akármi is lehet... [#wink]
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 január 08, 22:35
Írta: me3ua0a6 Dátum 2010 január 08, 22:35
Én már most érdeklődnék iránta![#eljen]
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 09, 01:22
Írta: s7manbs8 Dátum 2010 január 09, 01:22
A PC-s programot milyen nyelven írod ?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 január 09, 07:40
Írta: 000000000 Dátum 2010 január 09, 07:40
üdv mindenkinek!
Akinek probléma lenne a microxpvel hogy nincs benne magyar bilenyüzet és magyar kezelö felület az
letöltheti
magyar nyelvi csomagot
letöltés után a kiterjesztést át kell irni exe!

Akinek probléma lenne a microxpvel hogy nincs benne magyar bilenyüzet és magyar kezelö felület az
letöltheti
magyar nyelvi csomagot
letöltés után a kiterjesztést át kell irni exe!
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 09, 12:24
Írta: jv7pu3a5p Dátum 2010 január 09, 12:24
Hát ha teljesen elkékülök vele, lehet gyártatok hozzá rendes nyákot nem olyan kóklert amit én csinálok.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 09, 12:25
Írta: jv7pu3a5p Dátum 2010 január 09, 12:25
DELPHI
az AVRre meg C.
az AVRre meg C.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 január 09, 15:42
Írta: 000000000 Dátum 2010 január 09, 15:42
Nagyon jónak látszik a projekted, a végén Te leszel a Vezérlő Király.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 január 09, 18:54
Írta: jv7pu3a5p Dátum 2010 január 09, 18:54
Köszi, eddig szerencsére valóban jónak látszik.
:))
Íme egy videó a programról ahogy megcsinálja a kalibrációt a motor. Nem túl jól látható csak az látszik rajta ahogy szépen növekszik a grafikon, meg a motor hangja hallható halkan.
Kalibráció
A másikon meg kicsit meghajtottam a gépet
6000mm/perc, 800 gyorsulás
A videó végén egy pillanatra 6600ra állítottam, azért ott már vannak bajok bőven:))
És mindezt ugye 3mm trapéz orsóval.
:))
Íme egy videó a programról ahogy megcsinálja a kalibrációt a motor. Nem túl jól látható csak az látszik rajta ahogy szépen növekszik a grafikon, meg a motor hangja hallható halkan.
Kalibráció
A másikon meg kicsit meghajtottam a gépet
6000mm/perc, 800 gyorsulás
A videó végén egy pillanatra 6600ra állítottam, azért ott már vannak bajok bőven:))
És mindezt ugye 3mm trapéz orsóval.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 január 09, 19:21
Írta: 000000000 Dátum 2010 január 09, 19:21
Ez 6000 és 800 nagyon jó érték, klasszul is megy.
Az avi formátumot áttudod konvertálni a "Pro Coder3 Wizard" progival wmw-re,kissebb a méret, nekem nem gond(8 Mega ADSL), de akinek lassabb az internet, számít.
Az avi formátumot áttudod konvertálni a "Pro Coder3 Wizard" progival wmw-re,kissebb a méret, nekem nem gond(8 Mega ADSL), de akinek lassabb az internet, számít.
Cím: Re:Léptetőmotor
Írta: Ftomi Dátum 2010 január 19, 00:13
Írta: Ftomi Dátum 2010 január 19, 00:13
Üdv Mindenkinek!
Új vagyok itt a fórumon és a CNC-vel is nemrég kezdtem foglalkozni.
Mint új tagnak lenne is egy okos kérdésem.Próbáltam volna magam választ találni rá de jutottam előbbre.
5 vezetékes motort bipoláris vezérlővel tudok használni?Az összefogott "közöspont" nem okoz gondot?
Új vagyok itt a fórumon és a CNC-vel is nemrég kezdtem foglalkozni.
Mint új tagnak lenne is egy okos kérdésem.Próbáltam volna magam választ találni rá de jutottam előbbre.
5 vezetékes motort bipoláris vezérlővel tudok használni?Az összefogott "közöspont" nem okoz gondot?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 január 19, 00:16
Írta: besirkyjh Dátum 2010 január 19, 00:16
Szia
Megse probáld , ha csajk öt vezetékes .Nem lehet külön szedni ? ( legalább 6 ra )
[#confused]
Megse probáld , ha csajk öt vezetékes .Nem lehet külön szedni ? ( legalább 6 ra )
[#confused]
Cím: Re:Léptetőmotor
Írta: Ftomi Dátum 2010 január 19, 00:30
Írta: Ftomi Dátum 2010 január 19, 00:30
Szia!
Köszönöm a gyors választ!
Igazából szét lehetne venni 6 kivezetésesre de akkor szét kellene szednem a motort. Le kellene vennem legalábbis a hátsó pajzsot. Viszont azt olvasgattam hogy nem ajánlatos szétszedni ezeket a motorokat.
Köszönöm a gyors választ!
Igazából szét lehetne venni 6 kivezetésesre de akkor szét kellene szednem a motort. Le kellene vennem legalábbis a hátsó pajzsot. Viszont azt olvasgattam hogy nem ajánlatos szétszedni ezeket a motorokat.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 január 19, 00:37
Írta: besirkyjh Dátum 2010 január 19, 00:37
Azzal még nagy kárt nem teszel ha szét szeded , csak aforgorészt hagyd a hellyén .Ha még nemcsináltál ilyet akkor inkább hagyd unipolárisnak ,( nem olyan egyszerü még a vezetékek szétszedése sem) .
Szunya
[#oooo][#integet2]
Szunya
[#oooo][#integet2]
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 19, 00:39
Írta: s7manbs8 Dátum 2010 január 19, 00:39
A forgó részt nem szabad kivenni, ilyeneket mondanak a nagyon tapasztaltak.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 január 19, 08:43
Írta: besirkyjh Dátum 2010 január 19, 08:43
Szia
Igy van , de azt is mondják a tapasztaltabbak hogyha beleteszed a forgorészt egy azonos átméröjü vas ( mágnesezhetö ) csöbe akkor lehet akár tekercselni is az állorészt .Nekem sikerült mind két verziot kiprobálni , mind két verzio müködik csak az elsönél oda lett a nyomatékom fele ( eltünt az a jellegzetes kattogos lépés a motorbol ) .A másik verzionál ez nemlép fel .Ez csak öregebb motorokra igaz amik hamarabb elveszitik a mágnesességüket , vagy azokon könnyebb észre venni .
[#integet2]
Igy van , de azt is mondják a tapasztaltabbak hogyha beleteszed a forgorészt egy azonos átméröjü vas ( mágnesezhetö ) csöbe akkor lehet akár tekercselni is az állorészt .Nekem sikerült mind két verziot kiprobálni , mind két verzio müködik csak az elsönél oda lett a nyomatékom fele ( eltünt az a jellegzetes kattogos lépés a motorbol ) .A másik verzionál ez nemlép fel .Ez csak öregebb motorokra igaz amik hamarabb elveszitik a mágnesességüket , vagy azokon könnyebb észre venni .
[#integet2]
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2010 január 19, 08:47
Írta: Rabb Ferenc Dátum 2010 január 19, 08:47
Elsőre azért semmiképpen ne szedd szét! Bár egyszerű dolog, na de összerakni... Inkább írj egy pontos típusszámot, hogy néz ki? Méretek, tengelyátmérő stb. Lehet, hogy egy ismert motor, és akkor könnyebb tanácsot adni
Cím: Re:Léptetőmotor
Írta: Ftomi Dátum 2010 január 19, 16:04
Írta: Ftomi Dátum 2010 január 19, 16:04
Üdv Mindenkinek!
Erről a motorról lenne szó:
Shinano Kenshi STP-58D200 3.8V, 1.2A, 1.8 fok/lépés.
Sajnos ha nem lehet megoldani akkor nem tudom használni mivel bipoláris vezérlőm van. Akkor be kell szereznem valami hasonló paraméterű 6 vagy 4 vezetékes típust.
Erről a motorról lenne szó:
Shinano Kenshi STP-58D200 3.8V, 1.2A, 1.8 fok/lépés.
Sajnos ha nem lehet megoldani akkor nem tudom használni mivel bipoláris vezérlőm van. Akkor be kell szereznem valami hasonló paraméterű 6 vagy 4 vezetékes típust.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 január 19, 18:51
Írta: besirkyjh Dátum 2010 január 19, 18:51
Szia Tomi
Ha nemjutsz semmire talán tudok segiteni .
Viszonylag közel laksz hozzám és ha behozod Debrecenbe átkötöm Neked .
Vagy valaki segit aki még közelebb van Sárrétudvarihoz .
[#integet2]
Ha nemjutsz semmire talán tudok segiteni .
Viszonylag közel laksz hozzám és ha behozod Debrecenbe átkötöm Neked .
Vagy valaki segit aki még közelebb van Sárrétudvarihoz .
[#integet2]
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2010 január 19, 18:53
Írta: Rabb Ferenc Dátum 2010 január 19, 18:53
Ez valóban egy unipoláris motor. A kábelkivezetések alatt lévő kis NYÁK lapon van a négy tekercs egy-egy vége közösítve. Mérd ki, melyik a közös. Ehhez képest a másik négy azonos ellenállást mutat. Itt próbáld megtámadni, és a fóliából kialakított összekötő hidat átvagdosni. Ezután már "csak" az újonnan létrejött kivezetésekre (további három darab) kell huzalt forrasztani. Ezeket aztán a motoron kívül átkötheted bipolárisra. E helyett >>> ilyenre! Sok sikert (és türelmet)
Még egy kis adalék
Még egy kis adalék
Cím: Re:Léptetőmotor
Írta: Ftomi Dátum 2010 január 19, 22:26
Írta: Ftomi Dátum 2010 január 19, 22:26
Szervusztok!
Nem hagyott nyugodni a dolog és neki álltam. Levettem a hátlapot. A nyáklapról leforrasztottam a tekercsek kivezetéseit szerencsére a közös pont nem volt túl szűkre hagyva így volt annyi tartalék hogy tudtam helyezgetni a kivezetéseket. Kicsit elgondolkodva, méregetve (és persze nézegetve a linken lévő oldalakt) át forrasztottam a nyáklapon meglévő üres hatodik kivezetés helyére. Össze raktam kézzel megtekerve nem tapasztaltam gyengülést, sem szorulást a gyári állapothoz képest. Ráraktam a vezérlőre és jött a próba, működik!
Bár egy kicsit fura volt mert azt hittem meg-meg szorul a motor. A Jedicut-ot használtam a teszteléshez szabályos időközönként egy picit megtorpant a motor. De ahogy figyelgettem a monitort mindig akkor következett be mikor a "vágási folyamat" kék csíkja lépett egyet de ez már más tészta(kell egy jobb gép).
Köszönöm mindenkinek a segítséget!
Nem hagyott nyugodni a dolog és neki álltam. Levettem a hátlapot. A nyáklapról leforrasztottam a tekercsek kivezetéseit szerencsére a közös pont nem volt túl szűkre hagyva így volt annyi tartalék hogy tudtam helyezgetni a kivezetéseket. Kicsit elgondolkodva, méregetve (és persze nézegetve a linken lévő oldalakt) át forrasztottam a nyáklapon meglévő üres hatodik kivezetés helyére. Össze raktam kézzel megtekerve nem tapasztaltam gyengülést, sem szorulást a gyári állapothoz képest. Ráraktam a vezérlőre és jött a próba, működik!
Bár egy kicsit fura volt mert azt hittem meg-meg szorul a motor. A Jedicut-ot használtam a teszteléshez szabályos időközönként egy picit megtorpant a motor. De ahogy figyelgettem a monitort mindig akkor következett be mikor a "vágási folyamat" kék csíkja lépett egyet de ez már más tészta(kell egy jobb gép).
Köszönöm mindenkinek a segítséget!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 január 20, 06:39
Írta: 000000000 Dátum 2010 január 20, 06:39
A JediCut mindig is meg-meg fog torpanni, ez ilyen...
Használ inkább a Mach3-ast (akár demóban is), sokkal simább a motor járása!
Használ inkább a Mach3-ast (akár demóban is), sokkal simább a motor járása!
Cím: Re:Léptetőmotor
Írta: gsbwxanch Dátum 2010 január 25, 19:37
Írta: gsbwxanch Dátum 2010 január 25, 19:37
Honnan lehet megtudni egy léptetőmotorról, hogy hány A-os?

Előre is köszi!
Előre is köszi!
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 25, 19:45
Írta: s7manbs8 Dátum 2010 január 25, 19:45
U/R=I , 3V/3.5Ohm=0,857
Cím: Re:Léptetőmotor
Írta: 4um5b65d Dátum 2010 január 25, 19:52
Írta: 4um5b65d Dátum 2010 január 25, 19:52
Elektrontól.... [#taps][#taps][#nyes][#nyes]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 január 25, 19:56
Írta: 000000000 Dátum 2010 január 25, 19:56
helló elektron sikerült az éjszakai nyák készítés?? 220v-os keringető szivattyúra is alkalmazható?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 25, 20:06
Írta: s7manbs8 Dátum 2010 január 25, 20:06
Nem, ez arra nem jó, annak valami kicsi frekiváltó lehet talán jó... Még most akarom folytatni a tegnap estit, ma estére betart. [#circling][#circling]
Cím: Re:Léptetőmotor
Írta: gsbwxanch Dátum 2010 január 25, 20:14
Írta: gsbwxanch Dátum 2010 január 25, 20:14
Na most beégtem..:)
Cím: Re:Léptetőmotor
Írta: gsbwxanch Dátum 2010 január 25, 20:15
Írta: gsbwxanch Dátum 2010 január 25, 20:15
Köszi!
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2010 január 25, 20:33
Írta: Szalai György Dátum 2010 január 25, 20:33
Ahhoz a Tuba István készítette Home made frekiváltó 90fokos változata jó.
Nálam is szolgál egy példánya. Kifogástalan.
Nálam is szolgál egy példánya. Kifogástalan.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 január 25, 20:46
Írta: 000000000 Dátum 2010 január 25, 20:46
fűtés kerigingetésre is lehet használni?? ha alacsonyabb a tartály és a kazán közti hőkülömbség akkor lassabban megy ha viszont nől a külömbség akkor gyorsabb a szivattyú fordulata Példa: a kazán 45C- fokos, a puffertartály 43C akkor lassabban, ha rendesen ''tüzel'ུC fokos a kazán a tartály 43 akkor gyorsabb a szivattyú ilyet tud??
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2010 január 25, 20:57
Írta: Szalai György Dátum 2010 január 25, 20:57
Ilyet önmagában nem tud.
Egyfázisú 90fokra tekercselt rövidrezárt forgórészű AC motorok fordulatszám szabályozására való. Ilyennek gondolom a 230V-os konnektorba dugható keringető szivattyút is, ha leveszzük róla a segédfázis kondenzátort.
A kis frekiváltónak 10Volt DC szabályozó bemenete van, erre külön készíteni kell egy 10V DC kimenettű hőkülönbség mérő modult. Így tudja majd megfelelően szabályozni a keringető szivattyú fordulatszámát.
Szerintem Őt kérdezd a részletekről. A Home made topic-ban.
Egyfázisú 90fokra tekercselt rövidrezárt forgórészű AC motorok fordulatszám szabályozására való. Ilyennek gondolom a 230V-os konnektorba dugható keringető szivattyút is, ha leveszzük róla a segédfázis kondenzátort.
A kis frekiváltónak 10Volt DC szabályozó bemenete van, erre külön készíteni kell egy 10V DC kimenettű hőkülönbség mérő modult. Így tudja majd megfelelően szabályozni a keringető szivattyú fordulatszámát.
Szerintem Őt kérdezd a részletekről. A Home made topic-ban.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 január 25, 21:37
Írta: s7manbs8 Dátum 2010 január 25, 21:37
Csak, mert rajta volt az a 2 másik adat, onnan jött az ötlet.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 február 03, 19:42
Írta: 000000000 Dátum 2010 február 03, 19:42
sziasztok olyan kérdésem lenne valaki megtudná nekem mondami,hogy egy 5 kivezetésü step motornak hogyan tudom kimérni a tekercs végeket.
És hogyan kel bekötni a v4.1-es vezérlöbe köszönöm a valaszotokat elöreis
És hogyan kel bekötni a v4.1-es vezérlöbe köszönöm a valaszotokat elöreis
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2010 február 03, 20:38
Írta: Rabb Ferenc Dátum 2010 február 03, 20:38
A #2353-ban nagyjából megkapod mindenre a választ
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2010 február 04, 08:02
Írta: Szalai György Dátum 2010 február 04, 08:02
Abból, amit a motorodról eddig elmondtál, nem lehet egyértelmű tanácsot adni.
(Ezért írtam tegnap este magánlevélben, hogy küldjél képet a feliratairól.)
Az öt kivezetésű léptetőmotor az lehet unipoláris kétfázisú. Remélem a tiéd az.
De lehet ötfázisú ötszögkapcsolású motor is, aminek a vezérlése külön fejezet.
(Ezért írtam tegnap este magánlevélben, hogy küldjél képet a feliratairól.)
Az öt kivezetésű léptetőmotor az lehet unipoláris kétfázisú. Remélem a tiéd az.
De lehet ötfázisú ötszögkapcsolású motor is, aminek a vezérlése külön fejezet.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 február 04, 14:17
Írta: 000000000 Dátum 2010 február 04, 14:17
köszönöm a válaszokat
Cím: Re:Léptetőmotor
Írta: x0bnhi5ag Dátum 2010 február 23, 21:42
Írta: x0bnhi5ag Dátum 2010 február 23, 21:42
Szervusztok Urak!
Segítséget kérnék tőletek...az a gondom hogy a Z tengelyem léptecse pár napja kiszámíthatatlanul téveszt mindig felfelé, mintha nem bírná el a maró motort( teknomotor)Lehet hogy elfáradt? A vezérlő jó, semmi nem változott a beállításokban, csak mintha erőtlenebb lenne a motorom. Próbáltam lassítani, igy most 3 óra alatt csak 1 hibát ejtett. Két éven át stabilan megbízhatóan gyorsan működött. Cseréljem le?
Segítséget kérnék tőletek...az a gondom hogy a Z tengelyem léptecse pár napja kiszámíthatatlanul téveszt mindig felfelé, mintha nem bírná el a maró motort( teknomotor)Lehet hogy elfáradt? A vezérlő jó, semmi nem változott a beállításokban, csak mintha erőtlenebb lenne a motorom. Próbáltam lassítani, igy most 3 óra alatt csak 1 hibát ejtett. Két éven át stabilan megbízhatóan gyorsan működött. Cseréljem le?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 február 23, 21:54
Írta: 000000000 Dátum 2010 február 23, 21:54
Ez szerintem egy 100 Voltos, 40 Wattos, max. 1 Amperes váltóáramú motor, elég nagy leosztású hajtóművel. Azaz a cucc igen nagy nyomatékot adhat le alacsony fordulatszámon.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 március 02, 17:32
Írta: keri Dátum 2010 március 02, 17:32
Vaszil29-nek a PIC topikból>
Persze hogy jó a 24V 8A-es táp.
Feszültség minél nagyobb annál jobb, mivel a maximális fordulatszámát az határozza meg, de 12V fölött már bőven jól működnek a léptető motorok....persze ehez a vezérlődnek is tudnia kell azt a feszültséget kezelnie.
Én most egy 42V-al szórakozok, de a következő vezérlőmet 100V-ra tervezem.
A motorok feszültsége mindegy, mivel valójában árammal kell meghajtani ezeket. Egyenáramról csak 1,6V-ot bír az a motor, és nem is ad rá többet a vezérlő alacsony fordulaton, de nagy fordulaton amikor nagy frekvenciával üzemel, akkor már a tekercsek induktivitása is ellenállásként viselkedik akkor szükséges a nagyobb feszültség a névleges áram fentartásához. Tehát az a maximális feszültség amin még érdemes hajtani, de 12V-ról is mennek.
Megjegyzem Berger Lahr az 5 és 3 fázisu motorjairól híres és gyanúsan sok 5-s szerepel abban a típus jelölésben.
Hány vezetéke van neki? Mert ha 5 vagy 10 akkor kezdhetsz gyanakodni.
Máskülönben én is 5 fázisu motorokkal szenvedek.
Nagyon jó cucc egy 5 fázisú léptető, simább a járás pontosabb, de bonyolultabb vezérlőt építeni rá. Meg már kiment a divatból.
Persze hogy jó a 24V 8A-es táp.
Feszültség minél nagyobb annál jobb, mivel a maximális fordulatszámát az határozza meg, de 12V fölött már bőven jól működnek a léptető motorok....persze ehez a vezérlődnek is tudnia kell azt a feszültséget kezelnie.
Én most egy 42V-al szórakozok, de a következő vezérlőmet 100V-ra tervezem.
A motorok feszültsége mindegy, mivel valójában árammal kell meghajtani ezeket. Egyenáramról csak 1,6V-ot bír az a motor, és nem is ad rá többet a vezérlő alacsony fordulaton, de nagy fordulaton amikor nagy frekvenciával üzemel, akkor már a tekercsek induktivitása is ellenállásként viselkedik akkor szükséges a nagyobb feszültség a névleges áram fentartásához. Tehát az a maximális feszültség amin még érdemes hajtani, de 12V-ról is mennek.
Megjegyzem Berger Lahr az 5 és 3 fázisu motorjairól híres és gyanúsan sok 5-s szerepel abban a típus jelölésben.
Hány vezetéke van neki? Mert ha 5 vagy 10 akkor kezdhetsz gyanakodni.
Máskülönben én is 5 fázisu motorokkal szenvedek.
Nagyon jó cucc egy 5 fázisú léptető, simább a járás pontosabb, de bonyolultabb vezérlőt építeni rá. Meg már kiment a divatból.
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2010 április 06, 08:34
Írta: D.Laci Dátum 2010 április 06, 08:34
Mi lehet a léptető motorral, akor ha az egyik irányban egy bizonyos ponton katokás halható, kézzel tekerve egy irányban, másik irányban forgatva csak néha?
Csapágy vagy valami kosz kerülhetet bele?
Csapágy vagy valami kosz kerülhetet bele?
Cím: Re:Léptetőmotor
Írta: KoLa Dátum 2010 április 06, 17:44
Írta: KoLa Dátum 2010 április 06, 17:44
Én is voltam így amíg nem volt bekötve és csak úgy lógtak a vezetékek ,és kézzel forgattam!!!
Furcsa dolgokat produkált az indukció ! ha véletlen összeértek a vezetékek :))) olyan volt mintha a csapágy rossz lenne! aztán kipróbáltam és 3-4mm-es szikrákat produkált csak úgy kézzel megforgatva.
Lehetne áramfejlesztőnek is használni!De nálad biztos nem fordult elő ilyen véletlen összeérés!
Furcsa dolgokat produkált az indukció ! ha véletlen összeértek a vezetékek :))) olyan volt mintha a csapágy rossz lenne! aztán kipróbáltam és 3-4mm-es szikrákat produkált csak úgy kézzel megforgatva.
Lehetne áramfejlesztőnek is használni!De nálad biztos nem fordult elő ilyen véletlen összeérés!
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2010 április 06, 17:50
Írta: D.Laci Dátum 2010 április 06, 17:50
Valami mechanikus probléma lesz, sajnos.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 április 07, 22:57
Írta: Evodiron Dátum 2010 április 07, 22:57
Nah, csak ide értem már, látom megelőztél a kérdéssel. :)
Szóval ez a motor jelenleg nálam van, és videót is csináltam a kattogásról:
http://www.youtube.com/watch?v=X1VYsewVifY
A kábelek nem érnek össze, mert csatlakozóban van a végük. :)
(most kipróbálásképpen összekötöttem az egyik tekercspár végét, de így meg olyan nehéz tekerni, hogy alapból ugrál az egész motor. :D)
Valaki van itt budapesti, aki hétvégén ráérne egy tesztre ezzel a motorral, mert nekem nincs még vezérlőm. 3,5A/fázisos, és most bipolárisan van bekötve. Jó lenne tudni, hogy menet közben is kattog-e.
Adatlapja:
http://docs.google.com/viewer?a=v&q=cache:5fdz4B64WWQJ:www.servotrade.it/documenti///HY200-3450.pdf+hy200+3450+350+a8&hl=hu&gl=hu&pid=bl&srcid=ADGEEShwJl7pj27Qomsx0Isrp2M4wOe2vBfrj8aW8IHXw_0vP_vOxSnQ2mQ8yZJLX_wBlFAAv7pAMqEpW1xdzNpdXPcl20onM0lLmEeKhOlnEFWIWeiES2ck4p875ZkXe7-Ix82VDMo3&sig=AHIEtbSVECnl-uhicH79cSin-35TLEs7Tg
Köszi!
Üdv.: Evodiron
Szóval ez a motor jelenleg nálam van, és videót is csináltam a kattogásról:
http://www.youtube.com/watch?v=X1VYsewVifY
A kábelek nem érnek össze, mert csatlakozóban van a végük. :)
(most kipróbálásképpen összekötöttem az egyik tekercspár végét, de így meg olyan nehéz tekerni, hogy alapból ugrál az egész motor. :D)
Valaki van itt budapesti, aki hétvégén ráérne egy tesztre ezzel a motorral, mert nekem nincs még vezérlőm. 3,5A/fázisos, és most bipolárisan van bekötve. Jó lenne tudni, hogy menet közben is kattog-e.
Adatlapja:
http://docs.google.com/viewer?a=v&q=cache:5fdz4B64WWQJ:www.servotrade.it/documenti///HY200-3450.pdf+hy200+3450+350+a8&hl=hu&gl=hu&pid=bl&srcid=ADGEEShwJl7pj27Qomsx0Isrp2M4wOe2vBfrj8aW8IHXw_0vP_vOxSnQ2mQ8yZJLX_wBlFAAv7pAMqEpW1xdzNpdXPcl20onM0lLmEeKhOlnEFWIWeiES2ck4p875ZkXe7-Ix82VDMo3&sig=AHIEtbSVECnl-uhicH79cSin-35TLEs7Tg
Köszi!
Üdv.: Evodiron
Cím: Re:Léptetőmotor
Írta: 4thss2k2c Dátum 2010 május 01, 20:53
Írta: 4thss2k2c Dátum 2010 május 01, 20:53
Sziasztok!
Tud valaki valami adatlapot erről a motorról Sanyo Denki Stepsyn 103G770-0174
köszönöm
Tud valaki valami adatlapot erről a motorról Sanyo Denki Stepsyn 103G770-0174
köszönöm
Cím: Re:Léptetőmotor
Írta: re87dt3z3 Dátum 2010 május 04, 22:49
Írta: re87dt3z3 Dátum 2010 május 04, 22:49
Sziasztok!
Nyomtatót szeretnék átalakítani "cnc printernek". A mechanika adott (x,y), z-nek, ami a tollat mozgatná, vinyó, cd meghajtó mechanikát, vagy mágneskapcsolót alkalmaznák.
Utóbbi segítségével emelkedne - süllyedne a toll. Megoldható -e az egész szerkezet vezérlése szoftveresen, pl. nyomtato driverrel?
Minden segítséget megköszönök!
Üdv!
Nyomtatót szeretnék átalakítani "cnc printernek". A mechanika adott (x,y), z-nek, ami a tollat mozgatná, vinyó, cd meghajtó mechanikát, vagy mágneskapcsolót alkalmaznák.
Utóbbi segítségével emelkedne - süllyedne a toll. Megoldható -e az egész szerkezet vezérlése szoftveresen, pl. nyomtato driverrel?
Minden segítséget megköszönök!
Üdv!
Cím: Re:Léptetőmotor
Írta: ptt99m53 Dátum 2010 május 14, 18:41
Írta: ptt99m53 Dátum 2010 május 14, 18:41
Sziasztok!
Szereztem egy pár ilyen stepper mocit
Kérdés, hogy papirnehezéken kivül tudom-e használni valamire?
4 tekercs van benne, 2-2 sorba kötve, de a kötés bontható.
Köszi, Mr2t
Szereztem egy pár ilyen stepper mocit
Kérdés, hogy papirnehezéken kivül tudom-e használni valamire?
4 tekercs van benne, 2-2 sorba kötve, de a kötés bontható.
Köszi, Mr2t
Cím: Re:Léptetőmotor
Írta: designr Dátum 2010 május 14, 18:51
Írta: designr Dátum 2010 május 14, 18:51
Természetesen meg lehet hajtani,de nagy teljesítményre ne számíts.Max rajzolgatni,tanulni ....Nagyon pici a nyomatéka0.13Nm.Olcsón találsz 0.5-0.7 Nm motorokat amire építve egy kis mechanikát gravírozhatsz,marhatsz fába is stb..
Cím: Re:Léptetőmotor
Írta: iezx50gsm Dátum 2010 május 14, 22:09
Írta: iezx50gsm Dátum 2010 május 14, 22:09
Ha CNC-ben gondolkodsz csak a problémáid számát növeled vele... meghajtás, áttételezés stb. , ha mégis rászánod magad ,annyit költessz rá mintha vennél egy használhatót. Én már bejártam ezt az utat és nem sok sikerrel.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 01, 23:06
Írta: besirkyjh Dátum 2010 június 01, 23:06
Szoba kerültek a Vaterán és más hasonlo lapokon fellelhetö léptetö vezérlök minöségei .
Többnyire a TB6560AHQ val épitettek .
Szerintem az árukhoz képest sem produkálják azokat a követelményeket amiket specifikácio cimén adnak hozzájuk .Gyenge minöségö optocsatolok ,csak 40-50%-ban kihajtott és lassu üzem mod .Ezeket a paramétereket egy olyan kezdönek aki gyorsan akarja a gépét beüzemelni nem kell tudni ,csak a leirások és az árak döntik el hogy mit is vásárol .
Gyüjteni kell infokat és itt csak a gyakorlati tapasztalat számit nem a leirás ( az tulszép ) az olyan mint használt autot venni egy kereskedötöl ( valami stikli biztos van ) .
A lényeg : nagyon ajánlom azoknak az embereknek akik már forrasztottak és kicsit konyitanak az elektronikához egy kiprobált és jol bevált vezérlöt a Vaterán is fellelhetö L297-L298-bol épitve .
Terveztem hozzá egy egyoldalas nyákot amit vasalással könnyen ellehet késziteni , ha pontos az épités bekapcsolás és áram beállitás után müködik és csak használni kell .
Aki nem ismerné : 30V-rol 2A fázisonként max 400lépés/kört tud , de azt jol csinálja .Ez a 400lépés egy 3mm-es trapézorsonál még 0.01mm-alatt van az elméleti felbontása ( csak ha lusta lenne valaki számolni :)) )és még nincs is áttétel benne .Egy csatornát ha boltan veszi az IC-ket és a többi hozzávalot akkor kb: 3000ft/bol meg lehet épiteni ( a vaterán most 7 - 800ft a kt IC eggyütt ) .
Holnap be teszem a mappámba a nyáktervet és beültetési rajzot , illetve bárkinek elküldöm szivesen .Ha segiteni kell akkor itt a forumon a legcélszerübb mert abbol tanul más is .
Sok sikert hozzá .
Utánna van más elektronika is amit érdemes megépiteni .
Többnyire a TB6560AHQ val épitettek .
Szerintem az árukhoz képest sem produkálják azokat a követelményeket amiket specifikácio cimén adnak hozzájuk .Gyenge minöségö optocsatolok ,csak 40-50%-ban kihajtott és lassu üzem mod .Ezeket a paramétereket egy olyan kezdönek aki gyorsan akarja a gépét beüzemelni nem kell tudni ,csak a leirások és az árak döntik el hogy mit is vásárol .
Gyüjteni kell infokat és itt csak a gyakorlati tapasztalat számit nem a leirás ( az tulszép ) az olyan mint használt autot venni egy kereskedötöl ( valami stikli biztos van ) .
A lényeg : nagyon ajánlom azoknak az embereknek akik már forrasztottak és kicsit konyitanak az elektronikához egy kiprobált és jol bevált vezérlöt a Vaterán is fellelhetö L297-L298-bol épitve .
Terveztem hozzá egy egyoldalas nyákot amit vasalással könnyen ellehet késziteni , ha pontos az épités bekapcsolás és áram beállitás után müködik és csak használni kell .
Aki nem ismerné : 30V-rol 2A fázisonként max 400lépés/kört tud , de azt jol csinálja .Ez a 400lépés egy 3mm-es trapézorsonál még 0.01mm-alatt van az elméleti felbontása ( csak ha lusta lenne valaki számolni :)) )és még nincs is áttétel benne .Egy csatornát ha boltan veszi az IC-ket és a többi hozzávalot akkor kb: 3000ft/bol meg lehet épiteni ( a vaterán most 7 - 800ft a kt IC eggyütt ) .
Holnap be teszem a mappámba a nyáktervet és beültetési rajzot , illetve bárkinek elküldöm szivesen .Ha segiteni kell akkor itt a forumon a legcélszerübb mert abbol tanul más is .
Sok sikert hozzá .
Utánna van más elektronika is amit érdemes megépiteni .
Cím: Re:Léptetőmotor
Írta: gorbi Dátum 2010 június 03, 02:41
Írta: gorbi Dátum 2010 június 03, 02:41
Megnézném a vezérlő tervedet.
köszi
köszi
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 03, 07:45
Írta: besirkyjh Dátum 2010 június 03, 07:45
Szia
Tegnap csináltam normális nyákokat hozzá , ma beültetem és teszek ide fotot rola és a doksikat ( nyákterv , beültetési rajz , kis leirás ) elküldöm emailen .
Fel teszem az Ftp-re is de onnnan csak akkor tugyja valaki letölteni ha van jelszava .
Az itteni elérhetöséged müködik ?
Tegnap csináltam normális nyákokat hozzá , ma beültetem és teszek ide fotot rola és a doksikat ( nyákterv , beültetési rajz , kis leirás ) elküldöm emailen .
Fel teszem az Ftp-re is de onnnan csak akkor tugyja valaki letölteni ha van jelszava .
Az itteni elérhetöséged müködik ?
Cím: Re:Léptetőmotor
Írta: gorbi Dátum 2010 június 03, 08:25
Írta: gorbi Dátum 2010 június 03, 08:25
Elérem ftp-n !
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 03, 08:56
Írta: besirkyjh Dátum 2010 június 03, 08:56
Ok . Estefelé ott lessz .
Cím: Re:Léptetőmotor
Írta: Arany János Dátum 2010 június 03, 17:18
Írta: Arany János Dátum 2010 június 03, 17:18
Szia Zoltán!
Én is szeretnék megpróbálkozni az építéssel!
Ha nem nagy fáradtság, elküldenéd nekem is?
Én is szeretnék megpróbálkozni az építéssel!
Ha nem nagy fáradtság, elküldenéd nekem is?
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 03, 17:56
Írta: 35kpazcgr Dátum 2010 június 03, 17:56
Nekem is van egy L297-L298-as vezérlő rajzom.
Több rajzból kombináltam össze, úgy gondolom, jó lesz:

Több rajzból kombináltam össze, úgy gondolom, jó lesz:
Cím: Re:Léptetőmotor
Írta: x4rhew5r3 Dátum 2010 június 03, 18:11
Írta: x4rhew5r3 Dátum 2010 június 03, 18:11
Még tegyél az ENABLE, STEP és DIR bemenetekre egy-egy kondit (100p - 1nF). Nem biztos hogy kell, de ha mégis, akkor lesz helye.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 június 03, 18:32
Írta: svejk Dátum 2010 június 03, 18:32
De azért óvatosan ezekkel, mert a nyák topológiára elég kényes(áramvisszacsatolás), ha lehet kiforrott verziót használjatok.
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 03, 18:59
Írta: 35kpazcgr Dátum 2010 június 03, 18:59
Van egyoldalas nyáktervem is.
Forrasztási oldal:

Alkatrész oldal átkötésekkel:

Vélemény?
Forrasztási oldal:
Alkatrész oldal átkötésekkel:
Vélemény?
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2010 június 03, 19:19
Írta: Szalai György Dátum 2010 június 03, 19:19
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 június 03, 20:36
Írta: svejk Dátum 2010 június 03, 20:36
Csak őszintén...és csak vélemény:
A puffer negatív pontja, a shöntök negatív vége minél közelebb legyen egymáshoz, de ami fontosabb, hogy a két shönt elhelyezkedése(fóliahossz, induktivitás) minél szimmetrikusabb legyen, (lásd Szalai ajánlotta gyári tervet) az IC GND pontja is a pufferkonditól menjen, ilyen esetekben hasznos a telefóliás nyák vagy a kétoldalas egyik oldalon tele GND-vel.
Ezek általános érvényű tanácsok ilyen áramköröknél, lehet működik a Tiéd is de valószínű játszadozni kell a shönt és az IC közti RC-taggal. A gyári ajánlott érték általában nem jó...
Így hogy már készen van a terv, mindenféleképpen csináld meg egy példányban és számolj majd be a működéséről!
A puffer negatív pontja, a shöntök negatív vége minél közelebb legyen egymáshoz, de ami fontosabb, hogy a két shönt elhelyezkedése(fóliahossz, induktivitás) minél szimmetrikusabb legyen, (lásd Szalai ajánlotta gyári tervet) az IC GND pontja is a pufferkonditól menjen, ilyen esetekben hasznos a telefóliás nyák vagy a kétoldalas egyik oldalon tele GND-vel.
Ezek általános érvényű tanácsok ilyen áramköröknél, lehet működik a Tiéd is de valószínű játszadozni kell a shönt és az IC közti RC-taggal. A gyári ajánlott érték általában nem jó...
Így hogy már készen van a terv, mindenféleképpen csináld meg egy példányban és számolj majd be a működéséről!
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 június 03, 20:51
Írta: s7manbs8 Dátum 2010 június 03, 20:51
A táb csatlakozás IC lábai közé tegyél be kerámia kondikat, vagy SMD-st alulra forrasztva kics padokat, hogy majd ne zizegjen , ciripeljen az áramkör.
Cím: Re:Léptetőmotor
Írta: Varga Ferenc Dátum 2010 június 03, 21:10
Írta: Varga Ferenc Dátum 2010 június 03, 21:10
Üdv!
Én ezt építettem meg:http://www.otocoup.com/CarteL6208.htm#SpecifL297
Igaz még nem raktam gépre de szépen üzemel.
Én ezt építettem meg:http://www.otocoup.com/CarteL6208.htm#SpecifL297
Igaz még nem raktam gépre de szépen üzemel.
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 03, 21:20
Írta: 35kpazcgr Dátum 2010 június 03, 21:20
Ha megnézed, én is ezt vettem alapul!
Mind a kapcsolásnál, mind a nyáktervnél.
Ha neked szépen üzemel, az engem megnyugtat.
[#wave]
Mind a kapcsolásnál, mind a nyáktervnél.
Ha neked szépen üzemel, az engem megnyugtat.
[#wave]
Cím: Re:Léptetőmotor
Írta: Varga Ferenc Dátum 2010 június 03, 21:23
Írta: Varga Ferenc Dátum 2010 június 03, 21:23
Csak a diódáknak húzós az ára.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 június 03, 21:51
Írta: s7manbs8 Dátum 2010 június 03, 21:51
Jé, a tied ugyanaz.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 június 05, 16:14
Írta: Evodiron Dátum 2010 június 05, 16:14
LPT portra való bekötést mutatna nekem valaki?
Én kb. egy hete nézegettem a 297-298-as megoldásokat, de sehol nem láttam egy konkrét bekötési rajzot, hogy pl mit hányas lábra vezessek be. (lpt kimenet 2-3, 4-5, ... párok az egyes elemek órajele és forgásiránya, ha jól tudom, ugye?)
Én kb. egy hete nézegettem a 297-298-as megoldásokat, de sehol nem láttam egy konkrét bekötési rajzot, hogy pl mit hányas lábra vezessek be. (lpt kimenet 2-3, 4-5, ... párok az egyes elemek órajele és forgásiránya, ha jól tudom, ugye?)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 június 05, 17:16
Írta: s7manbs8 Dátum 2010 június 05, 17:16
MIlyen programhoz akarod, általában be lehet állítani, ahova tetted a pineket. 2-9 pl. kimenetek Step1, Dir1, Step2, Dir2, stb.
18-25 láb GND.
18-25 láb GND.
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 június 05, 18:54
Írta: me3ua0a6 Dátum 2010 június 05, 18:54
Ez valamennyire programfüggő is, tegyük fel, hogy mach3-at szeretnél használni.
Három egyszerű lehetőség: programból kinézed. Például így.
Elolvasod a
"gépkönyvét" (PDF). 4.4-es fejezet.
Avagy megnézed egy áramkör (PDF) bekötését.
Három egyszerű lehetőség: programból kinézed. Például így.
Elolvasod a
"gépkönyvét" (PDF). 4.4-es fejezet.
Avagy megnézed egy áramkör (PDF) bekötését.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 június 05, 19:19
Írta: Evodiron Dátum 2010 június 05, 19:19
Mást nagyon nem kell bekötni a 297-ből az LPT-be, ugye? (Egyenlőre a dos-os Turbo CNC nevű progit használom motor/elektronika teszteléshez)
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 június 05, 19:23
Írta: Evodiron Dátum 2010 június 05, 19:23
Igazából az L297-nek az órajel és a forgásirány bekötésén kívüli bekötésekre gondoltam, hogy kell-e még valamit a portra kötni. (pl enable és társai)
Az "áramkör (PDF)"-en semmi ilyen infót nem találtam, de azért köszi! :)
Az "áramkör (PDF)"-en semmi ilyen infót nem találtam, de azért köszi! :)
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 június 05, 20:20
Írta: me3ua0a6 Dátum 2010 június 05, 20:20
Más bekötés: alapból nem igényel mást. De ha magadnak akarsz különböző dolgokat szoftverből állítani, akkor megoldható.
Áramkör (PDF) 2. oldala, csoportokba van szedve a kimenet/bemenet. De lényegtelen, hisz nem erre irányult az eredeti kérdésed sem.
Áramkör (PDF) 2. oldala, csoportokba van szedve a kimenet/bemenet. De lényegtelen, hisz nem erre irányult az eredeti kérdésed sem.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 június 05, 20:37
Írta: s7manbs8 Dátum 2010 június 05, 20:37
Azzal a programmal is szépen el lehet játszadozni. Egy egész kis géppel is.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 június 05, 21:24
Írta: Evodiron Dátum 2010 június 05, 21:24
Oks, köszi a segítséget. Hamarosan nekiállok egy áramkörnek (amint végeztem a vizsgáimmal), aztán majd ha valami nem világos még kérdezek. Csak gondoltam most él a topik, akkor gyorsan rákérdezek erre. :)
(L297+L298-as verziót akarom megcsinálni és egy másikat, a 298-as helyett logikai kapuk+ izmos Fetek, hogy nagy áramokal is lehessen játszani)
(L297+L298-as verziót akarom megcsinálni és egy másikat, a 298-as helyett logikai kapuk+ izmos Fetek, hogy nagy áramokal is lehessen játszani)
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 05, 22:10
Írta: besirkyjh Dátum 2010 június 05, 22:10
Sziasztok .
Nagy nehezen sikerült eljutnom ide is .
Erröl a nyákrol lessz szó .
Csináltam fotokat a mappámban megtalálhatoak .
Midjárt irom a részleteket .

Nagy nehezen sikerült eljutnom ide is .
Erröl a nyákrol lessz szó .
Csináltam fotokat a mappámban megtalálhatoak .
Midjárt irom a részleteket .
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 05, 22:12
Írta: besirkyjh Dátum 2010 június 05, 22:12

Talán igy ?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 05, 22:29
Írta: besirkyjh Dátum 2010 június 05, 22:29
Az alap az L297-298 páros ( bontott Vaterán vásárolt ) .Végül is majdnem minden kapcsolás meg eggyezik csak a nyákokban van a külömbség .
Aki már probált ehez a pároshoz nyákot tervezni az tugyja hogy nagyon idioták a láb kivezetések .
Vagy kétoldalas nyák vagy tele van áthidalásokkal .Nem kis munkával sikerült egyoldalasra kicsiben és mindössze 2 áthidalással ( az is táp vonalon ) megoldani a nyákot ( 41 x 91mm ) de ebböl még lejön a függöleges panel ami a 298-at tarja , igy már csak 41x71mm a komplett áramkör .
Fél lépésben 400-as felbontásban ( 1mm 1 kör ) 35V-on 1000-es rámpával 1000 fordulatot simán megy és még van nyomatéka is .A motor 1.5A és 2.3V .
Anyák kinyomtatásához szükség lessz a Spint-Layout 5-re ( letölthetö ) .Ugy szoktam csinálni hogy egy stick-re van másolva a Sprint és a nyákterv amit nyomtatni kell megyek a boltba ( iroszer ) és lefuttatom az exe-t de az nem települ fel csak fut , meg nyitom a nyák tervet és nyomtatás .Uj képernyön csak a " C2 " marad a többi nem kell semmi tükör semmi nagyitás C2 és nyomtat .Ja " münyomo vagy valami jobb 100 - 130gr foto papirra lézer nyomtatoval .Magárol a vasalásos tecnikárol sok info van a Net-en de a höfok tényleg sokat számit .
Aki már probált ehez a pároshoz nyákot tervezni az tugyja hogy nagyon idioták a láb kivezetések .
Vagy kétoldalas nyák vagy tele van áthidalásokkal .Nem kis munkával sikerült egyoldalasra kicsiben és mindössze 2 áthidalással ( az is táp vonalon ) megoldani a nyákot ( 41 x 91mm ) de ebböl még lejön a függöleges panel ami a 298-at tarja , igy már csak 41x71mm a komplett áramkör .
Fél lépésben 400-as felbontásban ( 1mm 1 kör ) 35V-on 1000-es rámpával 1000 fordulatot simán megy és még van nyomatéka is .A motor 1.5A és 2.3V .
Anyák kinyomtatásához szükség lessz a Spint-Layout 5-re ( letölthetö ) .Ugy szoktam csinálni hogy egy stick-re van másolva a Sprint és a nyákterv amit nyomtatni kell megyek a boltba ( iroszer ) és lefuttatom az exe-t de az nem települ fel csak fut , meg nyitom a nyák tervet és nyomtatás .Uj képernyön csak a " C2 " marad a többi nem kell semmi tükör semmi nagyitás C2 és nyomtat .Ja " münyomo vagy valami jobb 100 - 130gr foto papirra lézer nyomtatoval .Magárol a vasalásos tecnikárol sok info van a Net-en de a höfok tényleg sokat számit .
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 05, 22:43
Írta: besirkyjh Dátum 2010 június 05, 22:43
Ezen a képen a léptetömotor áram beállitása látszik .
A trimmer potméter középsölábán kell mérni és a beállitani kivánt áram felét kell mérni rajta .
Tehát a pédában a léptetö 1.5A akkor a potin 0.7500-kell állitani , 2A-nél 1V lessz az érték .
Nem teszteltem csak 35V egyen-ig mert a kereskedelemben kaphato trafok 24V~ és ez kb: 35V egyennek felel meg .Az 5V-hozszükséges tápot külön szekunderröl ajánlom mert pl 35V-nál már nagyon melegszik ( ez nálam azt jelenti hogy még hütöbordán sem kéz meleg ) nagy feszültség különbséget kell neki el disszipálni ( hövé ) .Toroidra végtelen egyszerü egy kis 7-8V~ szekundert feltenni és akkor nins hiba .
Szerintem egy 160W-os trafoval a 3 csatorna elmegy de erösiteni lehet ( ha van értelme ) .

A trimmer potméter középsölábán kell mérni és a beállitani kivánt áram felét kell mérni rajta .
Tehát a pédában a léptetö 1.5A akkor a potin 0.7500-kell állitani , 2A-nél 1V lessz az érték .
Nem teszteltem csak 35V egyen-ig mert a kereskedelemben kaphato trafok 24V~ és ez kb: 35V egyennek felel meg .Az 5V-hozszükséges tápot külön szekunderröl ajánlom mert pl 35V-nál már nagyon melegszik ( ez nálam azt jelenti hogy még hütöbordán sem kéz meleg ) nagy feszültség különbséget kell neki el disszipálni ( hövé ) .Toroidra végtelen egyszerü egy kis 7-8V~ szekundert feltenni és akkor nins hiba .
Szerintem egy 160W-os trafoval a 3 csatorna elmegy de erösiteni lehet ( ha van értelme ) .
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 05, 22:56
Írta: besirkyjh Dátum 2010 június 05, 22:56
Itt lehet látni hogy 35V-nál mekkora az áram felvétele ( áll a motor ) és ez a max mert a 298-nak nincs pihentetöje az az ha áll akkor a legtöbb az áram felvétele .Figyeljünk rá hogy kissebb feszültségnél ez az áram nöni fog de kb: 20W-al számolhatunk de a beállitott értéknél ( trimmer ) sosem több .
Sajnos a képeken nem látszik de a motor kimeneteket és 2A-ig sima sztereo DIN aljzatra és dugora bizom ( semmi gondom nemvolt még vele )a vezérlö bemenetei 90fokos tüskesor bol vannak ami rá jön az pedig hüvelysor , egysorosba veszem öket ( 40 lábu azt hiszem ) és méretre vágom és forrasztás után zsugor csövel szigetelem , persze árnyékolt vezetékkel .

Sajnos a képeken nem látszik de a motor kimeneteket és 2A-ig sima sztereo DIN aljzatra és dugora bizom ( semmi gondom nemvolt még vele )a vezérlö bemenetei 90fokos tüskesor bol vannak ami rá jön az pedig hüvelysor , egysorosba veszem öket ( 40 lábu azt hiszem ) és méretre vágom és forrasztás után zsugor csövel szigetelem , persze árnyékolt vezetékkel .
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 05, 23:11
Írta: besirkyjh Dátum 2010 június 05, 23:11
Vissza kicsit a fordulatokhoz .
Egy léptetömotor csak viszonylag kis fordulaton képes nyomatékot leadni ( tapasztalat az 1000-es fordulat ) e fölött a nyomaték görbéje rohamosan csökken sajnos minél nagyobb egy léptetömotor ( ugy fizikai mint Nm-ben ) ez a fordulat mindig kicsivel csökken .
Tehát a motorunk fordul 1000-es ez azt jelenti egy 3mm es trapéz orsonál 3000mm/min a gép sebessége ezt akár használhatjuk is pozicionálásra DE!! az ördön nem alszik és megint csak tapasztalat de az 1000-et szorozzuk 0.7-el ( miért ennyivel nemtudom de bevált nagyon ) és igy biztonságosan lett 700-as fordulatunk ami 2100mm/min sebesség de ez már akár munkára is fogható ( G1) .
Még valami : a léptetök forognak sokkal gyorsabban is ( szorakozásbol nálam 9000/min a rekord ) de ha nyomatékot is akarunk akkor a gyorsulással könnyen megkereshetö a maximum .Megint csak tapasztalat ha egy léptetönél 1000-es gyorsulás van beállitva és igy meg keressük hogy melyik az a fordulat amin még hajlando elindulni akkor azt a fordulatot nyugodtan vehetjük alapnak ( 1000 körül ) persze ehez már kell a 35V-is .
Egy léptetömotor csak viszonylag kis fordulaton képes nyomatékot leadni ( tapasztalat az 1000-es fordulat ) e fölött a nyomaték görbéje rohamosan csökken sajnos minél nagyobb egy léptetömotor ( ugy fizikai mint Nm-ben ) ez a fordulat mindig kicsivel csökken .
Tehát a motorunk fordul 1000-es ez azt jelenti egy 3mm es trapéz orsonál 3000mm/min a gép sebessége ezt akár használhatjuk is pozicionálásra DE!! az ördön nem alszik és megint csak tapasztalat de az 1000-et szorozzuk 0.7-el ( miért ennyivel nemtudom de bevált nagyon ) és igy biztonságosan lett 700-as fordulatunk ami 2100mm/min sebesség de ez már akár munkára is fogható ( G1) .
Még valami : a léptetök forognak sokkal gyorsabban is ( szorakozásbol nálam 9000/min a rekord ) de ha nyomatékot is akarunk akkor a gyorsulással könnyen megkereshetö a maximum .Megint csak tapasztalat ha egy léptetönél 1000-es gyorsulás van beállitva és igy meg keressük hogy melyik az a fordulat amin még hajlando elindulni akkor azt a fordulatot nyugodtan vehetjük alapnak ( 1000 körül ) persze ehez már kell a 35V-is .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 06, 05:58
Írta: 000000000 Dátum 2010 június 06, 05:58
Gratula a projekthez. Érdekes a "kitekert" 298-as.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 06, 08:20
Írta: besirkyjh Dátum 2010 június 06, 08:20
Szia Bodi
Korán keltél .
Ha igy van állitva és ezt a csatit használjuk nagyon egyszerü nyákot lehet csinálni hiszen a lábak egysorban vannak .
Ezt a vezérlöt csak azért mutatom be hogy lehet jo vezérlöket csinálni is ami még használhato is .
Csak mint érdekesség : tegnap egy M10-es menetes szárral egy 4-5kg-os trafot vonszoltam vele a lino asztalon 2500mm/min-el 35V-on .
Csinálok még fotokat mert ma felteszem az MDF gépre csak a fotomasina másnapos volt tegnap ( tök homály ) ezért nem kinlodtam vele , sött még videot is csinálok ha nagyon bele jövök .
[#awink]
Korán keltél .
Ha igy van állitva és ezt a csatit használjuk nagyon egyszerü nyákot lehet csinálni hiszen a lábak egysorban vannak .
Ezt a vezérlöt csak azért mutatom be hogy lehet jo vezérlöket csinálni is ami még használhato is .
Csak mint érdekesség : tegnap egy M10-es menetes szárral egy 4-5kg-os trafot vonszoltam vele a lino asztalon 2500mm/min-el 35V-on .
Csinálok még fotokat mert ma felteszem az MDF gépre csak a fotomasina másnapos volt tegnap ( tök homály ) ezért nem kinlodtam vele , sött még videot is csinálok ha nagyon bele jövök .
[#awink]
Cím: Re:Léptetőmotor
Írta: Arany János Dátum 2010 június 06, 09:03
Írta: Arany János Dátum 2010 június 06, 09:03
Szia Zoli!
Nagyon mazsola vagyok az elektronikában, ezért lenne pár kérdésem:
1; ezzel a vezérlővel érdemes-e Robotron SPA52/60-5682-es motorokat (12V, 2x6ohm) bipolárisan hajtani?
2; alkatrészlistát készítenél-e? Még azt sem tudom, mi mit jelent a rajzokon!
3; #2410-es képen a hűtőborda előtt van egy alkatrész a nyák felső szélén, amit nem láttam a
panelterveken (ez persze nem jelenti azt, hogy nincs is ott) ezek mik lennének? és mért?
Tudom, ezek nagyon bugyuta kérdések, ezért mégegyszer elnézést kérek a hozzáértőktl!!!
Nagyon mazsola vagyok az elektronikában, ezért lenne pár kérdésem:
1; ezzel a vezérlővel érdemes-e Robotron SPA52/60-5682-es motorokat (12V, 2x6ohm) bipolárisan hajtani?
2; alkatrészlistát készítenél-e? Még azt sem tudom, mi mit jelent a rajzokon!
3; #2410-es képen a hűtőborda előtt van egy alkatrész a nyák felső szélén, amit nem láttam a
panelterveken (ez persze nem jelenti azt, hogy nincs is ott) ezek mik lennének? és mért?
Tudom, ezek nagyon bugyuta kérdések, ezért mégegyszer elnézést kérek a hozzáértőktl!!!
Cím: Re:Léptetőmotor
Írta: Arany János Dátum 2010 június 06, 09:05
Írta: Arany János Dátum 2010 június 06, 09:05
Bocsánat!!!
mért= miért
hozzáértőktl= hozzáértőktől
mért= miért
hozzáértőktl= hozzáértőktől
Cím: Re:Léptetőmotor
Írta: gsbwxanch Dátum 2010 június 06, 09:05
Írta: gsbwxanch Dátum 2010 június 06, 09:05
[#taps][#eljen]
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 június 06, 10:07
Írta: Evodiron Dátum 2010 június 06, 10:07
Szia Zoli!
Kapcsolási rajzot merre találok a vezérlődről?
Köszi!
Kapcsolási rajzot merre találok a vezérlődről?
Köszi!
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 06, 11:32
Írta: besirkyjh Dátum 2010 június 06, 11:32
Szia
Lehet vele de tul nagy reményeket ne füzz hozzá .Lemérem pontosan hgy mekkora feszt ad a léptetönek maximum és azt hiszem nekem is van ilyen motorom , kis türelmet kérek de meg lessz .
A lista lemaradt de a beültetési rajzon elég jol lehet látni csinálok eggyett azért .
Ha a nyák oldalira gondolsz akkor az ott 2db 100pf-os kerámia kondi ami elhagyhato de az esetleges zavarokat lehet vele csökkenteni .
Az eggyik a dir bemeneten a másik a step bemeneten van párhuzamosan a GND-vel ( test ) és ha az IC lábaira forrasztod akkor igazán hatásos .
Van egy piros kerámia szintén ( a 298-as nyák tetején ) az a dolga hogy zavart szürjön de itt a 298-ba menö 5V-al van párhuzamosan ( GND) kötve ) értéke nem kritikus ez egy 56nf-os kerámia ( 47nf és 100nf között bármi jo ) és a lehetö leg közelebb az IC lábaihoz ( zárlatra figyelni ) .
Lehet vele de tul nagy reményeket ne füzz hozzá .Lemérem pontosan hgy mekkora feszt ad a léptetönek maximum és azt hiszem nekem is van ilyen motorom , kis türelmet kérek de meg lessz .
A lista lemaradt de a beültetési rajzon elég jol lehet látni csinálok eggyett azért .
Ha a nyák oldalira gondolsz akkor az ott 2db 100pf-os kerámia kondi ami elhagyhato de az esetleges zavarokat lehet vele csökkenteni .
Az eggyik a dir bemeneten a másik a step bemeneten van párhuzamosan a GND-vel ( test ) és ha az IC lábaira forrasztod akkor igazán hatásos .
Van egy piros kerámia szintén ( a 298-as nyák tetején ) az a dolga hogy zavart szürjön de itt a 298-ba menö 5V-al van párhuzamosan ( GND) kötve ) értéke nem kritikus ez egy 56nf-os kerámia ( 47nf és 100nf között bármi jo ) és a lehetö leg közelebb az IC lábaihoz ( zárlatra figyelni ) .
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 06, 11:44
Írta: besirkyjh Dátum 2010 június 06, 11:44
Szia
Hát azt végül is sehol , vagy minden hol .
Szinte minden kapcsolás meg eggyezik a nyák a lényeg .
A # 2390 -ben "Tomahawk linkelt egy rajzot , gyakorlatilag ezzel meg eggyezik csak pár alkatrész difi van .Nálam a syncron nincs kivezetve sehova ( jumper elmarat ) a potival sorba nem 2.7k-s ellemálás van hanem 5.6 k és a kimenetre a shotky diodák nálam UF4002-s tipusuak de bármilyen 1A-es vagy max 2A-es shotky dioda használhato és még egy hogy a söntök 2db 1ohm 2W-os ellenálás párhuzamosan kötve , a többi ugyan az .
Az enable is elhagyhato ( felkel huzni egy 10k körüli ellenálással +5V-ra ) .Nálam azért van kikötve mert nyomogombot teszek rá és megnyomva testre huzom a bemenetét és a léptetönek elveszi a tartoáramát igy kézzel tudom odébb tekerni az orsot ( jo haszna van ha vég állásrol le kell hozni a tengelyt ) és pozicionálni ( csak globálisan ) és érintöt venni is ezt használom utánna elengedem a nyomogombot és mehet a program szerint .
Hát azt végül is sehol , vagy minden hol .
Szinte minden kapcsolás meg eggyezik a nyák a lényeg .
A # 2390 -ben "Tomahawk linkelt egy rajzot , gyakorlatilag ezzel meg eggyezik csak pár alkatrész difi van .Nálam a syncron nincs kivezetve sehova ( jumper elmarat ) a potival sorba nem 2.7k-s ellemálás van hanem 5.6 k és a kimenetre a shotky diodák nálam UF4002-s tipusuak de bármilyen 1A-es vagy max 2A-es shotky dioda használhato és még egy hogy a söntök 2db 1ohm 2W-os ellenálás párhuzamosan kötve , a többi ugyan az .
Az enable is elhagyhato ( felkel huzni egy 10k körüli ellenálással +5V-ra ) .Nálam azért van kikötve mert nyomogombot teszek rá és megnyomva testre huzom a bemenetét és a léptetönek elveszi a tartoáramát igy kézzel tudom odébb tekerni az orsot ( jo haszna van ha vég állásrol le kell hozni a tengelyt ) és pozicionálni ( csak globálisan ) és érintöt venni is ezt használom utánna elengedem a nyomogombot és mehet a program szerint .
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 06, 11:46
Írta: besirkyjh Dátum 2010 június 06, 11:46
Tettem a mappámba egy "zip-et " letölhetö és abban benne van minden amire szükség lehet .
Aki nemtugyja letölteni irjon ide vagy magánban és elküldöm " Mammut postával" Neki .
Csinálok egy alkatrész listát és ide teszem .
Aki nemtugyja letölteni irjon ide vagy magánban és elküldöm " Mammut postával" Neki .
Csinálok egy alkatrész listát és ide teszem .
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 06, 12:12
Írta: besirkyjh Dátum 2010 június 06, 12:12
Lusta lista meg jött .

Cím: Re:Léptetőmotor
Írta: Arany János Dátum 2010 június 06, 12:26
Írta: Arany János Dátum 2010 június 06, 12:26
Nagyon köszönöm!!!
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 06, 12:34
Írta: besirkyjh Dátum 2010 június 06, 12:34
Bocsánat a listábol 2db 220pf kerámia kondi lemaradt ( RC tag része ) .
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 06, 12:38
Írta: besirkyjh Dátum 2010 június 06, 12:38
Küldjem el ?
Irj egy mail nekem és ahoz már tudok csatolni .
Irj egy mail nekem és ahoz már tudok csatolni .
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 06, 12:59
Írta: 35kpazcgr Dátum 2010 június 06, 12:59
Szia Zoli!
Nálam a szinkron azért van kivezetve, mert ha ezeket a pontokat a vezérlő kártyán összekötöd, az oszcillátort pedig csak egy motorkártyán hagyod működni (a 3,3 nF-os kondit itt nem zárod rövidre), akkor szinkronban fog működni valamennyi motorvezérlőd. Könnyebb párhuzamosan kapcsolni két tengelyt. Ez akkor érdekes, ha pl. az Y tengelyedet két motorral és orsóval hajtod. Ekkor a második motort rá lehet kötni az A tengely vezérlőjére. Ekkor nem szükséges mechanikusan (pl. bordásszíjjal) összekötni a két orsót, azok telejesen szinkronban fognak mozogni.
Nálam a szinkron azért van kivezetve, mert ha ezeket a pontokat a vezérlő kártyán összekötöd, az oszcillátort pedig csak egy motorkártyán hagyod működni (a 3,3 nF-os kondit itt nem zárod rövidre), akkor szinkronban fog működni valamennyi motorvezérlőd. Könnyebb párhuzamosan kapcsolni két tengelyt. Ez akkor érdekes, ha pl. az Y tengelyedet két motorral és orsóval hajtod. Ekkor a második motort rá lehet kötni az A tengely vezérlőjére. Ekkor nem szükséges mechanikusan (pl. bordásszíjjal) összekötni a két orsót, azok telejesen szinkronban fognak mozogni.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 06, 13:06
Írta: besirkyjh Dátum 2010 június 06, 13:06
Pontosan .
Nem is nagyon tudtam hogy mire használják (de igy ahogy irod logikus ) egyszer összekötöttem mint ahogy egynémelyik rajzon van és hát elkezdett rángatozni össze vissza , persze az LPT-röl semmi vezérlést nemkapott .
Azota ki sem kötöm inkább .
Köszi ez hasznos lehet még .
Nem is nagyon tudtam hogy mire használják (de igy ahogy irod logikus ) egyszer összekötöttem mint ahogy egynémelyik rajzon van és hát elkezdett rángatozni össze vissza , persze az LPT-röl semmi vezérlést nemkapott .
Azota ki sem kötöm inkább .
Köszi ez hasznos lehet még .
Cím: Re:Léptetőmotor
Írta: Arany János Dátum 2010 június 06, 13:13
Írta: Arany János Dátum 2010 június 06, 13:13
Az alkatrészekre gondolsz?
A képet kimásoltam, kondikat hozzáírom.
Levelet azért írok.
A képet kimásoltam, kondikat hozzáírom.
Levelet azért írok.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 június 06, 13:41
Írta: Evodiron Dátum 2010 június 06, 13:41
Ez a szinkron arra is jó, hogy 1 rezgőkörről menjen mind a 3 tengely is, egymástól független vezérléssel, nem?
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 06, 13:56
Írta: 35kpazcgr Dátum 2010 június 06, 13:56
Van egy vezérlő kártya rajzom (LPT kártya) és paneltervem is, ha érdekel, felteszem.
A belinkelt motorvezérlőkhöz illeszkedik.
A belinkelt motorvezérlőkhöz illeszkedik.
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 06, 13:57
Írta: 35kpazcgr Dátum 2010 június 06, 13:57
Igen.
Így kevesebb zavarjel keletkezik, stabilabb lesz a rendszer.
Így kevesebb zavarjel keletkezik, stabilabb lesz a rendszer.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 06, 15:22
Írta: besirkyjh Dátum 2010 június 06, 15:22
Na pont ez nem müködött nekem azért maradt a tengelyenkénti oscillátor .
LPT kártya is van hozzá amin a charge pump is rajta van .
Tölem jöhet az is ha valakinek nemsérti az üzletét .
LPT kártya is van hozzá amin a charge pump is rajta van .
Tölem jöhet az is ha valakinek nemsérti az üzletét .
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 06, 15:23
Írta: besirkyjh Dátum 2010 június 06, 15:23
János
Küldtem egy csomagot , minden benne van amire szükséged lessz .
Küldtem egy csomagot , minden benne van amire szükséged lessz .
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 június 06, 15:35
Írta: Evodiron Dátum 2010 június 06, 15:35
Van egy gyári panelem, a vaterán is fent volt régebben, VTamástól kaptam, azon 4 ilyen IC páros van, és egybe vannak szinkronizálva (az elsőnél van az oszcillátor). Valamint a forgásirány is egybe van kötve, szóval majd annak a vezetékezését néhol lehet át kell vágnom, hogy külön lehessen használni.
Cím: Re:Léptetőmotor
Írta: may47wb Dátum 2010 június 06, 16:24
Írta: may47wb Dátum 2010 június 06, 16:24
Ezt az L297/298 az dolgot én is megépítettem.




Szerintem érdemesebb sla70xx vagy tb6560-ból építeni vezérlőt, amibe nem csalódik az ember.
Szerintem érdemesebb sla70xx vagy tb6560-ból építeni vezérlőt, amibe nem csalódik az ember.
Cím: Re:Léptetőmotor
Írta: gsbwxanch Dátum 2010 június 06, 17:58
Írta: gsbwxanch Dátum 2010 június 06, 17:58
Ez nektek nagyon megy.
[#wink][#worship]
[#wink][#worship]
Cím: Re:Léptetőmotor
Írta: neduddgi Dátum 2010 június 06, 18:47
Írta: neduddgi Dátum 2010 június 06, 18:47
Sziasztok!
Kérdésem lenne, mert én nem értek ehhez (sem).
Vexta 2 fázisú DC3V 4A motornak mekkora lehet a forgató nyomatéka?
És egy Nanotech 2,4V 6A -esnek?
Köszi!
Kérdésem lenne, mert én nem értek ehhez (sem).
Vexta 2 fázisú DC3V 4A motornak mekkora lehet a forgató nyomatéka?
És egy Nanotech 2,4V 6A -esnek?
Köszi!
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 06, 18:49
Írta: 35kpazcgr Dátum 2010 június 06, 18:49
Tetszik a te megoldásod is!
Én azért teszek egy egyszerű optós leválasztást a motorok és az LPT port közé.
Valami ilyesmi lesz.
Én azért teszek egy egyszerű optós leválasztást a motorok és az LPT port közé.
Valami ilyesmi lesz.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 június 06, 19:18
Írta: svejk Dátum 2010 június 06, 19:18
Elektronika topic #6768.
Vigyázz nehogy beleessél Te is!!!
Az optok kimenetén használj kisebb munkaellenállást a nagyobb sebesség érdekében, a gyári ajánlás 1.9 kOhm.
a LED-ek munkaellenállásának is inkább 330 Ohm ajánlott.
A bemenetek optikai védelme legalább olyan fontos, ne spórolj azzal az 5 optoval.
Vigyázz nehogy beleessél Te is!!!
Az optok kimenetén használj kisebb munkaellenállást a nagyobb sebesség érdekében, a gyári ajánlás 1.9 kOhm.
a LED-ek munkaellenállásának is inkább 330 Ohm ajánlott.
A bemenetek optikai védelme legalább olyan fontos, ne spórolj azzal az 5 optoval.
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 06, 19:37
Írta: 35kpazcgr Dátum 2010 június 06, 19:37
4,1 kOhmos ellenállás esetén is még 500 kHz az átviteli frekvencia.
A Mach3 mennyit tud a STEP kimenetre adni?
A Mach3 mennyit tud a STEP kimenetre adni?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 június 06, 19:46
Írta: svejk Dátum 2010 június 06, 19:46
Méréseim szerint 3us a legkisebb jelszélesség, még akkor is , ha motor tuning ablakban 0 van beírva. aztán 4 es értéktől már valós a kimeneti jelszélesség. Ezt a mérést az R2.63 verziónál végeztem többféle PC-vel.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 06, 19:48
Írta: 000000000 Dátum 2010 június 06, 19:48
100khz max!
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 06, 19:55
Írta: 35kpazcgr Dátum 2010 június 06, 19:55
Akkor maradok a 3,3 kOhmnál.
A motorvezérlőn levő 10 kOhm még párhozamosan beleszól az eredőbe, tehát a valóságos terhelő ellenállás kb. 2,5 kOhm lesz.
A motorvezérlőn levő 10 kOhm még párhozamosan beleszól az eredőbe, tehát a valóságos terhelő ellenállás kb. 2,5 kOhm lesz.
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 06, 19:58
Írta: 35kpazcgr Dátum 2010 június 06, 19:58
Az LPT illesztő nyákterve:

Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 június 06, 19:59
Írta: svejk Dátum 2010 június 06, 19:59
A kondikat ne sajnáld, minden opto tápfeszlábához közvetlen rakj egyet.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 06, 20:00
Írta: 000000000 Dátum 2010 június 06, 20:00
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 június 06, 20:21
Írta: svejk Dátum 2010 június 06, 20:21
Kérdés, hogy a 17-es LPT lábból hogy csinál bemenetet?
Tudtommal bidirectional-nál is csak a 2-9 láb lehet bemenet.
Tudtommal bidirectional-nál is csak a 2-9 láb lehet bemenet.
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 06, 20:29
Írta: 35kpazcgr Dátum 2010 június 06, 20:29
Van hely, elfér!
[#papakacsint]
[#papakacsint]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 06, 20:46
Írta: 000000000 Dátum 2010 június 06, 20:46
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 június 06, 20:59
Írta: svejk Dátum 2010 június 06, 20:59
Szerintem ettől még nem lesz a 17-es láb bemenet, de meg kellene kérdezni Snecit.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 06, 21:21
Írta: 000000000 Dátum 2010 június 06, 21:21
És honan veszed hogy a 17láb bemenet?
kimenetként felhasználhato tetszé szerint ha például a H2 leirásban megnézed maromotor...hütöfoladék stb! [#email]
kimenetként felhasználhato tetszé szerint ha például a H2 leirásban megnézed maromotor...hütöfoladék stb! [#email]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 06, 21:28
Írta: 000000000 Dátum 2010 június 06, 21:28
sneci igy fogalmaza a 4b leirásba:
"A vezérlők közös READY, más szóval készenléti jele"
4b leirás!
[#rolleyes]
"A vezérlők közös READY, más szóval készenléti jele"
4b leirás!
[#rolleyes]
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 június 06, 21:28
Írta: svejk Dátum 2010 június 06, 21:28
Te linkelted a #2452-ben.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 június 06, 21:30
Írta: svejk Dátum 2010 június 06, 21:30
Itt már csak 5 bemenet van, ez így oké.
De a #2452-ben más rajzot linkeltél.
De a #2452-ben más rajzot linkeltél.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 06, 21:31
Írta: 000000000 Dátum 2010 június 06, 21:31
van kettö le irás is rola!
elég részletes....
elég részletes....
Cím: Re:Léptetőmotor
Írta: knifemaster Dátum 2010 június 06, 21:32
Írta: knifemaster Dátum 2010 június 06, 21:32
Visszatérnék kicsit a topic címhez,
mert bár sokat visszaolvastam,de nem találtam amit kerestem.
Van,egy elvileg(google) DC 24V os stepperem ami 2,2V,2A és 6 kivezetéses.
Hogyan tudom megállapítani,hogy mekkora nyomatékkal bírhat?
mert bár sokat visszaolvastam,de nem találtam amit kerestem.
Van,egy elvileg(google) DC 24V os stepperem ami 2,2V,2A és 6 kivezetéses.
Hogyan tudom megállapítani,hogy mekkora nyomatékkal bírhat?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 június 06, 21:32
Írta: svejk Dátum 2010 június 06, 21:32
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 06, 21:33
Írta: 000000000 Dátum 2010 június 06, 21:33
a mapámba a Kapcs.png képen minden alkatrész érték rajta van azért kell!
a leirásokban a kapcsolásokon nem minden érték van meg!
a leirásokban a kapcsolásokon nem minden érték van meg!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 06, 21:35
Írta: 000000000 Dátum 2010 június 06, 21:35
ok![#vigyor2]
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 június 06, 21:36
Írta: svejk Dátum 2010 június 06, 21:36
Tápegységből 2 A-t engedsz az egyik tekercsre, majd egy ismert erőkaron, célszerűen 100 mm megpróbálod egy erőmérővel kimozdítani az álló helyzetéből, ha nincs erőmérő akkor használd a gravitációt, vagyis súlyokat pakolj a vízszintes erőkar végére.
Ez lesz a tartónyomaték, vagyis a maximum amit tud a motor.
Ez lesz a tartónyomaték, vagyis a maximum amit tud a motor.
Cím: Re:Léptetőmotor
Írta: knifemaster Dátum 2010 június 06, 21:39
Írta: knifemaster Dátum 2010 június 06, 21:39
Ez az ,köszöntem szégyen.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 06, 21:42
Írta: 000000000 Dátum 2010 június 06, 21:42
de lehet még bemenetet gyártani ha pci lpt2 kártyára ha még valamire nem lene elég az öt bemenet!
a kapcsoláson szerintem a bemeneti optok is el hagyhatok ha rés optokat használnak végálás és home érzékelésre nem pedig végálás kapcs bár home nak végálás kapcsolo nem valami pontos megoldás!
a kapcsoláson szerintem a bemeneti optok is el hagyhatok ha rés optokat használnak végálás és home érzékelésre nem pedig végálás kapcs bár home nak végálás kapcsolo nem valami pontos megoldás!
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 06, 22:34
Írta: besirkyjh Dátum 2010 június 06, 22:34
Szia János
Még mielött félre értésre kerülne a dolog .
Ezek az L298 és 297 párosok jo vezérlö IC-k és kezdöszintem böségesen megteszik a dolgokat .
Nagyon is használhato vezérlö készithetö belöle olcson .
A 6560 egy elég nyügös IC ( nem részletezem ).
Most hogy elöjöttek jobbnál jobb verziok sok embernek ambiciot , kezdölökést ad hogy Ö maga is lát gyakorlatban megépitett olcso vezérlöt .
A mai napig használom ezeket az IC-ket pedig tudnék komolyabb vezérlöt is csinálni .
Nem rég kezdtem egy komolyabb vezérlöhöz ami 80V és 7A tud fázisonként és mikrosteppes 1/32 .Szerinted azt hány ember épiteni meg a kezdök közül? Az épités öröme nem csak a mechanikára érvényes ,ne felejtsd el mikor a Te kis alugéped elkészült mekkora örömöt jelentet az elsö munkák készitése .Ugyan ezek érvényesek az elektronikára is .
Tiszteljük azokat akik az alapoknál most kezdik .Vagy már elfelejtettük hogy volt idö mikor a rajz olvasás nekünk is kihivást jelentett.
Ezek a dolgok inkább gesztusnak számitanak a segiteni akarás és nem a profizmus ( mindentöl lehet jobbat és bonyolultabbat csinálni ha van értelme ).
[#nemtudom]
Még mielött félre értésre kerülne a dolog .
Ezek az L298 és 297 párosok jo vezérlö IC-k és kezdöszintem böségesen megteszik a dolgokat .
Nagyon is használhato vezérlö készithetö belöle olcson .
A 6560 egy elég nyügös IC ( nem részletezem ).
Most hogy elöjöttek jobbnál jobb verziok sok embernek ambiciot , kezdölökést ad hogy Ö maga is lát gyakorlatban megépitett olcso vezérlöt .
A mai napig használom ezeket az IC-ket pedig tudnék komolyabb vezérlöt is csinálni .
Nem rég kezdtem egy komolyabb vezérlöhöz ami 80V és 7A tud fázisonként és mikrosteppes 1/32 .Szerinted azt hány ember épiteni meg a kezdök közül? Az épités öröme nem csak a mechanikára érvényes ,ne felejtsd el mikor a Te kis alugéped elkészült mekkora örömöt jelentet az elsö munkák készitése .Ugyan ezek érvényesek az elektronikára is .
Tiszteljük azokat akik az alapoknál most kezdik .Vagy már elfelejtettük hogy volt idö mikor a rajz olvasás nekünk is kihivást jelentett.
Ezek a dolgok inkább gesztusnak számitanak a segiteni akarás és nem a profizmus ( mindentöl lehet jobbat és bonyolultabbat csinálni ha van értelme ).
[#nemtudom]
Cím: Re:Léptetőmotor
Írta: may47wb Dátum 2010 június 07, 01:15
Írta: may47wb Dátum 2010 június 07, 01:15
Helló!
Nem felejtettem el! Az egyik legnagyobb dolog az az volt amikor megmozdult a léptetőmotorom!
Segíteni akarásból ajánlottam az sla ic-t. A tb6560-at visszavonom mert nem ismerem, csak láttam pár házilag építettet ami jónak nézett ki.
Az L297/298 páros, nem mondom hogy rossz, de nem éppen a legegyszerűbben megépíthető vezérlő. Legalábbis én sokat kísérleteztem mire használható lett.
Ha a nyák elrendezés nem jó, akkor már nem is működik normálisan. Meg ha jól emlékszem elég drágák voltak hozzá a gyors diódák. Ami nekem nem tetszett benne az az, hogy csak fél lépést tud, meg álló helyzetbe felmelegítette a motorokat.
Ha engem kérdez egy kezdő, én mindenféleképpen az sla ic-s vezérlőt ajánlom neki. Mert jobb és egyszerűbb.
Lehet kicsit drágább az ic hozzá, de a megépítése szerintem annak se okoz gondot aki nemnagyon ért az elektronikához.
Az első L297/298

És az első sla

Nem felejtettem el! Az egyik legnagyobb dolog az az volt amikor megmozdult a léptetőmotorom!
Segíteni akarásból ajánlottam az sla ic-t. A tb6560-at visszavonom mert nem ismerem, csak láttam pár házilag építettet ami jónak nézett ki.
Az L297/298 páros, nem mondom hogy rossz, de nem éppen a legegyszerűbben megépíthető vezérlő. Legalábbis én sokat kísérleteztem mire használható lett.
Ha a nyák elrendezés nem jó, akkor már nem is működik normálisan. Meg ha jól emlékszem elég drágák voltak hozzá a gyors diódák. Ami nekem nem tetszett benne az az, hogy csak fél lépést tud, meg álló helyzetbe felmelegítette a motorokat.
Ha engem kérdez egy kezdő, én mindenféleképpen az sla ic-s vezérlőt ajánlom neki. Mert jobb és egyszerűbb.
Lehet kicsit drágább az ic hozzá, de a megépítése szerintem annak se okoz gondot aki nemnagyon ért az elektronikához.
Az első L297/298
És az első sla
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 június 07, 01:42
Írta: Evodiron Dátum 2010 június 07, 01:42
Szia!
Miért kényes ez az IC páros a nyák kialakítására (L297-289)?
Miért kényes ez az IC páros a nyák kialakítására (L297-289)?
Cím: Re:Léptetőmotor
Írta: may47wb Dátum 2010 június 07, 02:45
Írta: may47wb Dátum 2010 június 07, 02:45
Könnyen összeszed mindent, gerjedhet. De ezt azok jobban el tudják magyarázni neked aki több ilyen vezérlőt csinált, hogy mire kell ügyelni. Használható vezérlőt lehet belőle csinálni, de nekem nem jött be. Összeszedem a rajzaimat és felrakom.
Cím: Re:Léptetőmotor
Írta: may47wb Dátum 2010 június 07, 03:13
Írta: may47wb Dátum 2010 június 07, 03:13
Elküldtem emailbe mindenestől. Módosíthatod javíthatod megoszthatod. Találtam egy ilyet is:

Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 07, 07:01
Írta: besirkyjh Dátum 2010 június 07, 07:01
Szia
Nem ezek a kényesek hanem szinte mind eggyik .
Talán az Alegrok a legjobban .
De , még egyszer mondom a nyák számit és hogy készült-e belöle jol müködö példány ( tehát tapasztalat van rola ).
Nem ezek a kényesek hanem szinte mind eggyik .
Talán az Alegrok a legjobban .
De , még egyszer mondom a nyák számit és hogy készült-e belöle jol müködö példány ( tehát tapasztalat van rola ).
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 07, 07:33
Írta: besirkyjh Dátum 2010 június 07, 07:33
Szia
Az SLA-t meg én nem ismerem .
Ha ugy gondolod hogy meg osztanád az itt lévökkel tedd azt ( ha jol látom unipoláris ) .
Pont ezekröl a dolgokrol beszélek , hogy mindenkinek van a fiokban egy általa használt saját épitésü vezérlö és azokat kellene elö venni és nem a licitálos lapokrol vásárolni a bizonytalant .Aki nemtugyja megépiteni annak itt van segitség ( szájba rágos ) .
Ha megnézed a shotky-kat UF4002 ( 8db ) és gyakorlatilag bármilyen tipus jo bele ami legalább 1A-t tud akkor nemolyan drága az .Az árak 3A-nél kezdödnek .
Minél több fajta vezérlöt betudunk mutatni annál több emberke tugyja megépiteni és még választani is tud belölük ( ez lenne a cél ).
Nem az a lényeg hogy Te mit használsz most ha nem az hogy mivel kezdted , a többi majd jön magátol .
János , nem vitatkozni akarok Veled vagy mással , de ugy látszik ki kell provokálni hogy elökerüljenek a jo és egyszerü dolgok .Már elfelejtettük hogy a fiokoknak van alja is és ezek rejtik sokszor a jo dolgokat .
[#awink]
Az SLA-t meg én nem ismerem .
Ha ugy gondolod hogy meg osztanád az itt lévökkel tedd azt ( ha jol látom unipoláris ) .
Pont ezekröl a dolgokrol beszélek , hogy mindenkinek van a fiokban egy általa használt saját épitésü vezérlö és azokat kellene elö venni és nem a licitálos lapokrol vásárolni a bizonytalant .Aki nemtugyja megépiteni annak itt van segitség ( szájba rágos ) .
Ha megnézed a shotky-kat UF4002 ( 8db ) és gyakorlatilag bármilyen tipus jo bele ami legalább 1A-t tud akkor nemolyan drága az .Az árak 3A-nél kezdödnek .
Minél több fajta vezérlöt betudunk mutatni annál több emberke tugyja megépiteni és még választani is tud belölük ( ez lenne a cél ).
Nem az a lényeg hogy Te mit használsz most ha nem az hogy mivel kezdted , a többi majd jön magátol .
János , nem vitatkozni akarok Veled vagy mással , de ugy látszik ki kell provokálni hogy elökerüljenek a jo és egyszerü dolgok .Már elfelejtettük hogy a fiokoknak van alja is és ezek rejtik sokszor a jo dolgokat .
[#awink]
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 07, 07:45
Írta: 35kpazcgr Dátum 2010 június 07, 07:45
Nagyon fontos a nyáktervnél, hogy a nagyáramú és a jel földek határozottan el legyenek különítve egymástól.
Mellékelek egy L298-ashoz hasobnló IC adatlapjáról egy képet, azon világosan látszik a dolog.
A pirossal bekeretezett rész meg arra ad megoldást, hogyan lehet a motorok álló helyzetében a tartóáramot csökkenteni.
Egy egyszerű monostabilt kell triggerelni a STeP jelekkel, a kimenetét rákötni a fetre, és ahogy lejár az időzítés, az kapcsolja a fetet, ami lecsökkenti a motor áramát. Az ellenállásokat kell csak megfelelően méretezni.

Mellékelek egy L298-ashoz hasobnló IC adatlapjáról egy képet, azon világosan látszik a dolog.
A pirossal bekeretezett rész meg arra ad megoldást, hogyan lehet a motorok álló helyzetében a tartóáramot csökkenteni.
Egy egyszerű monostabilt kell triggerelni a STeP jelekkel, a kimenetét rákötni a fetre, és ahogy lejár az időzítés, az kapcsolja a fetet, ami lecsökkenti a motor áramát. Az ellenállásokat kell csak megfelelően méretezni.
Cím: Re:Léptetőmotor
Írta: gorbi Dátum 2010 június 07, 07:48
Írta: gorbi Dátum 2010 június 07, 07:48
Én ezt építettem meg, kb 10 éve megy hibátlanul.
http://www-users.rwth-aachen.de/Thorsten.Ostermann/i_schritt.htm
http://www-users.rwth-aachen.de/Thorsten.Ostermann/i_schritt.htm
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 07, 08:52
Írta: 35kpazcgr Dátum 2010 június 07, 08:52
Hohó!
Ott a megoldás a linkeden tartóáram csökkentésére!

Ott a megoldás a linkeden tartóáram csökkentésére!
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 07, 08:53
Írta: 35kpazcgr Dátum 2010 június 07, 08:53
Namégegyszer:

Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 június 07, 08:55
Írta: keri Dátum 2010 június 07, 08:55
Kedves Gorbi!
Ne vedd piszkálásnak! Tényleg nem nagy probléma, csak az új emberek nem szokták tudni ezeket, ezért mondom el.
1. Az egyszerűbb követhetőség miatt, ha válaszolsz valakinek, akkor az adott hozzászólás jobb oldalán található "Válasz" feliratra kattintva válaszolj, így az üzeneted alján megjelenik kinek válaszoltál.
2. Ha linkelsz egy oldalt, akkor a "hozzászólás" ablak alján a "mehet" gombtól jobbra lent, van egy "url" felirat. Ha erre kattintva a felugró ablakba írod be a címet, akkor az a szövegben úgy jelenik meg hogy csak rá kell kattintani, és nem kell másolgatni a böngészőben. Ráadásul nem is a közvetlen címet látjuk hanem egy tetszőleges beírt szöveget.
További szép napot!
Ne vedd piszkálásnak! Tényleg nem nagy probléma, csak az új emberek nem szokták tudni ezeket, ezért mondom el.
1. Az egyszerűbb követhetőség miatt, ha válaszolsz valakinek, akkor az adott hozzászólás jobb oldalán található "Válasz" feliratra kattintva válaszolj, így az üzeneted alján megjelenik kinek válaszoltál.
2. Ha linkelsz egy oldalt, akkor a "hozzászólás" ablak alján a "mehet" gombtól jobbra lent, van egy "url" felirat. Ha erre kattintva a felugró ablakba írod be a címet, akkor az a szövegben úgy jelenik meg hogy csak rá kell kattintani, és nem kell másolgatni a böngészőben. Ráadásul nem is a közvetlen címet látjuk hanem egy tetszőleges beírt szöveget.
További szép napot!
Cím: Re:Léptetőmotor
Írta: gorbi Dátum 2010 június 07, 09:07
Írta: gorbi Dátum 2010 június 07, 09:07
Ok semmi gond, nem konkrét személynek válaszoltam, csak a témához próbáltam kapcsolódni.
A kérdéses vezérlő egyébként tényleg nagyon jól megtervezett, az emlegetett problémák fel sem merülnek. Azért ujra irom a linket :
ügyes L297 L298 vezérlő
A kérdéses vezérlő egyébként tényleg nagyon jól megtervezett, az emlegetett problémák fel sem merülnek. Azért ujra irom a linket :
ügyes L297 L298 vezérlő
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 07, 09:08
Írta: besirkyjh Dátum 2010 június 07, 09:08
Nálam a fettes verzio müködött és a végén nem a 298 volt hanem fettek , na itt fordult meg a projekt ( árban ) .
Ezeket a 297-298 IC-ket most be lehet szerezni a Vaterán 6-800ft-ért párban az az a 3pár kerül max 2400ft+postába .Ha boltbol veszed akkor már lehet gondolkodni az SLA-n vagy más hasonlo egyszerü IC-ken .
Ezeket a 297-298 IC-ket most be lehet szerezni a Vaterán 6-800ft-ért párban az az a 3pár kerül max 2400ft+postába .Ha boltbol veszed akkor már lehet gondolkodni az SLA-n vagy más hasonlo egyszerü IC-ken .
Cím: Re:Léptetőmotor
Írta: may47wb Dátum 2010 június 07, 13:22
Írta: may47wb Dátum 2010 június 07, 13:22
Ha a Q1-et földrehúzod, 5V-ot enged a ref bemenetre és alvó állapotba lesz az ic, vagyis teljesen leveszi az áramot a motorról.
A tartóáram csökkentését ic-n belül megoldották, ha nem kap jelet, pár ms után vissza veszi az áramot.
A tartóáram csökkentését ic-n belül megoldották, ha nem kap jelet, pár ms után vissza veszi az áramot.
Cím: Re:Léptetőmotor
Írta: may47wb Dátum 2010 június 07, 13:29
Írta: may47wb Dátum 2010 június 07, 13:29
Különben ha a bipoláris vezérlő topikba, vagy vezérlő építés topikba menne ez a dolog, már rég én is csatlakoztam volna, mert érdekel ez a dolog, tegnap csak véletlen olvastam ide be.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 07, 13:32
Írta: besirkyjh Dátum 2010 június 07, 13:32
Jogos
Lehet én kezdtem rossz hellyen .
Menjünk oda valahova .
[#eljen]
Lehet én kezdtem rossz hellyen .
Menjünk oda valahova .
[#eljen]
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 07, 19:27
Írta: 35kpazcgr Dátum 2010 június 07, 19:27
Nem egészen.
Ha megnézed gorbi által belinkelt vezérlés teljes rajzát, akkor láthatod, hogy Q1 csak csökkenti a Vref feszültségét, de nem húzza nullára. Mintegy 70%-ra csökkenti a feszültséget, és ezzel együtt a a beállított áramot.
Tehát, ha nem érkezik STEPP jel a bemenetre, akkor a beállított áramlimit lecsökken erre a szintre, és mivel az átfolyt árammal négyzetesen arányos a motort "fűtő" teljesítmény, ézért az is a felére csökken, tehát jóval kevésbé fog melegedni, mint enélkül a trükk nélkül.
Az L297 adatlapján sehol sem találom azt, amit írtál, hogy ha nem kap jelet, levenné az áramot.
Ha megnézed gorbi által belinkelt vezérlés teljes rajzát, akkor láthatod, hogy Q1 csak csökkenti a Vref feszültségét, de nem húzza nullára. Mintegy 70%-ra csökkenti a feszültséget, és ezzel együtt a a beállított áramot.
Tehát, ha nem érkezik STEPP jel a bemenetre, akkor a beállított áramlimit lecsökken erre a szintre, és mivel az átfolyt árammal négyzetesen arányos a motort "fűtő" teljesítmény, ézért az is a felére csökken, tehát jóval kevésbé fog melegedni, mint enélkül a trükk nélkül.
Az L297 adatlapján sehol sem találom azt, amit írtál, hogy ha nem kap jelet, levenné az áramot.
Cím: Re:Léptetőmotor
Írta: may47wb Dátum 2010 június 07, 19:50
Írta: may47wb Dátum 2010 június 07, 19:50
#2476-hoz írtam. SLA7077MR!
Nem az L297-re!
Nem az L297-re!
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 07, 19:57
Írta: 35kpazcgr Dátum 2010 június 07, 19:57
Bocs, benéztem....
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 június 07, 20:16
Írta: svejk Dátum 2010 június 07, 20:16
L297-nél vigyázni kell a pihentetésel, mert könnyen elveszhet az első pár us-os impulzus.
Én anno úgy oldottam meg hogy a step-jel egy újraindítható monostabilt indítgatott mely kimenete vezérelte a ref. feszültséget, ha bizonyos idő után nem jött jel.
Maga a step-jel pedig kicsit késleltetve volt az L297 számára, így biztosan a monostabil már beállította a ref.t mire odaért a step.
Én anno úgy oldottam meg hogy a step-jel egy újraindítható monostabilt indítgatott mely kimenete vezérelte a ref. feszültséget, ha bizonyos idő után nem jött jel.
Maga a step-jel pedig kicsit késleltetve volt az L297 számára, így biztosan a monostabil már beállította a ref.t mire odaért a step.
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 07, 20:48
Írta: 35kpazcgr Dátum 2010 június 07, 20:48
Valami hasonlót vizionáltam én is a 2476-ban.
[#wave]
[#wave]
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 07, 23:21
Írta: besirkyjh Dátum 2010 június 07, 23:21
Szia
Nekem egy olyan volt hogy egy 555-ös IC dolgoztatott egy kis fetet és egy trimmerrel belehetett álitani a lekapcsolás szintjét .
Nekem egy olyan volt hogy egy 555-ös IC dolgoztatott egy kis fetet és egy trimmerrel belehetett álitani a lekapcsolás szintjét .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 08, 10:51
Írta: 000000000 Dátum 2010 június 08, 10:51
Ezeket az IC-ket lehet még boltban kapni?
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 08, 10:58
Írta: 35kpazcgr Dátum 2010 június 08, 10:58
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 június 08, 11:01
Írta: keri Dátum 2010 június 08, 11:01
már hogyne lehetne, nagyon népszerűek mert sok mindenre lehet használni. Van SMD kivitel meg olyan amiben több áramkör is van.
Cím: Re:Léptetőmotor
Írta: neduddgi Dátum 2010 június 08, 19:43
Írta: neduddgi Dátum 2010 június 08, 19:43
Sziasztok!
Meg tudná valaki mondani, hogy ez milyen kötés (uni, vagy bi) és hogy miképp lenne a másik?
pirosfehér-sárga
sárgafehér-piros
narancs-feketefehér
fekete-narancsfehér
Bocs, ha ostoba a kérdés, most ismerkedem a témával (innen)!
Meg tudná valaki mondani, hogy ez milyen kötés (uni, vagy bi) és hogy miképp lenne a másik?
pirosfehér-sárga
sárgafehér-piros
narancs-feketefehér
fekete-narancsfehér
Bocs, ha ostoba a kérdés, most ismerkedem a témával (innen)!
Cím: Re:Léptetőmotor
Írta: 279nwbpsa Dátum 2010 június 08, 20:14
Írta: 279nwbpsa Dátum 2010 június 08, 20:14
Szia!Ez nyolc vezeték.Szerintem itt unipoláris és bipoláris kötés is lehetséges.
Cím: Re:Léptetőmotor
Írta: 279nwbpsa Dátum 2010 június 08, 20:16
Írta: 279nwbpsa Dátum 2010 június 08, 20:16
Ja és most az utóbbira van kötve.
Cím: Re:Léptetőmotor
Írta: neduddgi Dátum 2010 június 08, 20:25
Írta: neduddgi Dátum 2010 június 08, 20:25
Köszi!
Igen mindkettőt tudja, csak bizonytalan voltam benne, de erre jutottam én is a fellelhető rajzok alapján.
Azé' valami ragad rám a sok itteni olvasás közben ( a koszon kívül is)!
Igen mindkettőt tudja, csak bizonytalan voltam benne, de erre jutottam én is a fellelhető rajzok alapján.
Azé' valami ragad rám a sok itteni olvasás közben ( a koszon kívül is)!
Cím: Re:Léptetőmotor
Írta: 279nwbpsa Dátum 2010 június 08, 20:49
Írta: 279nwbpsa Dátum 2010 június 08, 20:49
Szívesen!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 08, 20:54
Írta: 000000000 Dátum 2010 június 08, 20:54
Szia Tamás,
sikerült fényképezni ma?
Üdv
sikerült fényképezni ma?
Üdv
Cím: Re:Léptetőmotor
Írta: 279nwbpsa Dátum 2010 június 08, 21:17
Írta: 279nwbpsa Dátum 2010 június 08, 21:17
Szia!Sajnos nem.Holnap reggel-délelőtt pótolom a mulasztásomat.Elnézést kérek!
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 08, 23:49
Írta: besirkyjh Dátum 2010 június 08, 23:49
Szia
Most jöttem le a mühelyböl ( éhes vagyok )
reggel postázok pár LPT panelt és azzal voltam elfoglalva .
Vannak igen ahogy a Keri is irja sokmindenre használják ( kis dc motor vezérlötöl a léptetömotorokig ) .HQ , RET , LOMEX ,TME stb nagyon változnak az árak de a TME a legolcsobb ott 1400ft a kettö és a végfok ( 298 ) az olcsobb .
Ha valaki a Vaterárol még tud venni 4pár a nyákon és 3500ft ( azt hiszem ) akkor szétbontva van neki shotky diodája és a söntök és persze az IC párban ( L297 L298 ) nem rossz az ár .A " Misu "-t kell keresni , ugy tudom van még nekik .
Most jöttem le a mühelyböl ( éhes vagyok )
reggel postázok pár LPT panelt és azzal voltam elfoglalva .
Vannak igen ahogy a Keri is irja sokmindenre használják ( kis dc motor vezérlötöl a léptetömotorokig ) .HQ , RET , LOMEX ,TME stb nagyon változnak az árak de a TME a legolcsobb ott 1400ft a kettö és a végfok ( 298 ) az olcsobb .
Ha valaki a Vaterárol még tud venni 4pár a nyákon és 3500ft ( azt hiszem ) akkor szétbontva van neki shotky diodája és a söntök és persze az IC párban ( L297 L298 ) nem rossz az ár .A " Misu "-t kell keresni , ugy tudom van még nekik .
Cím: Re:Léptetőmotor
Írta: kisinas Dátum 2010 június 09, 09:55
Írta: kisinas Dátum 2010 június 09, 09:55
Nekem van még egy az említett panelból, ha valakit érdekel...
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 június 09, 10:01
Írta: Evodiron Dátum 2010 június 09, 10:01
Szia Zoli!
Te láttad már ezt a panelt? Ilyet akarok majd átalakítani, mert most 10ohm-os ellenállások vannak rajta, meg az órajel is össze van kötve rajtuk. Szerinted ezek a diódák amik rajta vannak jók lesznek a max 2A-os hajtáshoz?
Te láttad már ezt a panelt? Ilyet akarok majd átalakítani, mert most 10ohm-os ellenállások vannak rajta, meg az órajel is össze van kötve rajtuk. Szerinted ezek a diódák amik rajta vannak jók lesznek a max 2A-os hajtáshoz?
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 09, 11:36
Írta: 35kpazcgr Dátum 2010 június 09, 11:36
Én is ilyet bontottam szét.
Azok a diódák csak 1A-esek, tehát felejtősek.
Nem kell hozzá shotky dióda.
A lényeg, hogy gyors legyen. Ha jól emlékszem, ~50-75 ns kapcsolási idejű kell.
Az UF5408 már megfelel, a SOS Electronicnáűl 10 db-tól 40 Ft az ára.
Azok a diódák csak 1A-esek, tehát felejtősek.
Nem kell hozzá shotky dióda.
A lényeg, hogy gyors legyen. Ha jól emlékszem, ~50-75 ns kapcsolási idejű kell.
Az UF5408 már megfelel, a SOS Electronicnáűl 10 db-tól 40 Ft az ára.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 június 09, 11:44
Írta: Evodiron Dátum 2010 június 09, 11:44
Aham, akkor ez is jó lenne?
UF 5404 Ultra Fast dioda 400 V 3 A 50 nS DO201?
Ez netto 33,33Ft az elektrokontha-ban.
UF 5404 Ultra Fast dioda 400 V 3 A 50 nS DO201?
Ez netto 33,33Ft az elektrokontha-ban.
Cím: Re:Léptetőmotor
Írta: 279nwbpsa Dátum 2010 június 09, 12:06
Írta: 279nwbpsa Dátum 2010 június 09, 12:06
Ugyan ilyen kis "négytengelyes",3000Ft-os paneled van?
Az alkatrész kinyerése céljából teljesen szétbontottad,vagy csak a diódákat szedted ki,a csere végett?
Az alkatrész kinyerése céljából teljesen szétbontottad,vagy csak a diódákat szedted ki,a csere végett?
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 09, 12:18
Írta: 35kpazcgr Dátum 2010 június 09, 12:18
Simán!
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 09, 12:23
Írta: 35kpazcgr Dátum 2010 június 09, 12:23
Szétbontottam.
Csak az alkatrészeket használom fel.
De én vettem a Vaterán másik panelt is 8000 Ft-ért! Azon 9 db L297, 6 db L298, és 14 db L6203 IC volt
Ez az L6203 is szimpatikus IC. Nem kell hozzá dióda, be van építve!
Itt egy kapcsolás hozzá:
Csak az alkatrészeket használom fel.
De én vettem a Vaterán másik panelt is 8000 Ft-ért! Azon 9 db L297, 6 db L298, és 14 db L6203 IC volt
Ez az L6203 is szimpatikus IC. Nem kell hozzá dióda, be van építve!
Itt egy kapcsolás hozzá:
Cím: Re:Léptetőmotor
Írta: 279nwbpsa Dátum 2010 június 09, 12:47
Írta: 279nwbpsa Dátum 2010 június 09, 12:47
Ez ha jól látom 48V 4A és kb. 3000Ft.
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 09, 13:01
Írta: 35kpazcgr Dátum 2010 június 09, 13:01
Igen.
Párja 3000 Ft.
Párja 3000 Ft.
Cím: Re:Léptetőmotor
Írta: 279nwbpsa Dátum 2010 június 09, 13:38
Írta: 279nwbpsa Dátum 2010 június 09, 13:38
Az első helyen,ahol sebtiben utánanéztem,ott 3000Ft/db.aztán már találtam olcsóbban is. :)
Nekem,mint laikusnak amúgy szimpatikusnak tűnik ez az L6203 IC.Vagy van valami nyűgje,amiért inkább az L297-298 a jobb megoldás?
Nekem,mint laikusnak amúgy szimpatikusnak tűnik ez az L6203 IC.Vagy van valami nyűgje,amiért inkább az L297-298 a jobb megoldás?
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 09, 13:52
Írta: 35kpazcgr Dátum 2010 június 09, 13:52
A HQ-nál 1400 Ft darabja.
Ha többet rendelsz, még kedvezményt is kapsz.
A kimeneti RC szűrőt kell jól bejátszani, akkor semmi gond sincs! (22 nF, 10 Ohm)
Ha többet rendelsz, még kedvezményt is kapsz.
A kimeneti RC szűrőt kell jól bejátszani, akkor semmi gond sincs! (22 nF, 10 Ohm)
Cím: Re:Léptetőmotor
Írta: 279nwbpsa Dátum 2010 június 09, 14:10
Írta: 279nwbpsa Dátum 2010 június 09, 14:10
Azt hiszem,hogy egyenlőre nem fogok belekapni ebbe(is) :)
Azért köszönöm az ötletet,jó tanácsot!
Azért köszönöm az ötletet,jó tanácsot!
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 június 09, 14:22
Írta: Evodiron Dátum 2010 június 09, 14:22
Ezeknél a diódáknál egyébként mit kell figyelembe venni? Ha mondjuk Fet-es megoldást használok a 298 helyett, és kell 5A, akkor legalább 5A-es diódát használjak? (vagy párhuzamosan 3A-est).
Max fesz mennyi legyen neki?
Max fesz mennyi legyen neki?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 09, 14:33
Írta: besirkyjh Dátum 2010 június 09, 14:33
Szia
Irtam a tipusát a shotky nak UF4002 , nézd meg az adatlapját hány A tud :)
[#awink]
Irtam a tipusát a shotky nak UF4002 , nézd meg az adatlapját hány A tud :)
[#awink]
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 09, 14:46
Írta: besirkyjh Dátum 2010 június 09, 14:46
Szia
Biztos jo ez is ( nem ismerem de sokat látom a NET-en ) .Személyszerint én ugy gondolom ha 2-3A fölé kell mennem akkor már csak a fet az ami szoba jöhet ( nem Ic-n belül ).
Egy tuti jo meghajto IC-t kell találni és a vége már nemgond és a meghajtoban legyen mikrostep is mert ha használsz nagyobb motort ott már tényleg gond lehet a léptetö saját rezonanciájával .Ezen segit a mikrostep , két egészlépést közt az átmenet ami a motor rezonanciát megszünteti .
Biztos jo ez is ( nem ismerem de sokat látom a NET-en ) .Személyszerint én ugy gondolom ha 2-3A fölé kell mennem akkor már csak a fet az ami szoba jöhet ( nem Ic-n belül ).
Egy tuti jo meghajto IC-t kell találni és a vége már nemgond és a meghajtoban legyen mikrostep is mert ha használsz nagyobb motort ott már tényleg gond lehet a léptetö saját rezonanciájával .Ezen segit a mikrostep , két egészlépést közt az átmenet ami a motor rezonanciát megszünteti .
Cím: Re:Léptetőmotor
Írta: kisinas Dátum 2010 június 09, 15:28
Írta: kisinas Dátum 2010 június 09, 15:28
Ilyen L6203 -as IC-kel szerelt panelom nekem is van, de én nem bontottam szét, hanem megpróbálom feltérképezni a bekötéseit. Elég jól haladok vele, és nem is olyan bonyolult mint elsőre tűnik.
"Mindössze" 240 pólusú a csatlakozófelület ebből a fele a 16 db L6203 kivezetései hármasával párhuzamosítva. Az L297 bemeneteiről visszafelé haladva már megtaláltam a legfontosabb (Dir, Half/full, Enable) bekötéseit. Még egy kis türelem és szabadidő kérdése és meg lesz a teljes rajz! Kb 500 Ft-ból kijön a tüskesor, + pár darab szorítós csatlakozó egy nyákon. és már csak azon kell elgondolkodnom hogy mit is kezdek 8 tengellyel?
[#nyes]
"Mindössze" 240 pólusú a csatlakozófelület ebből a fele a 16 db L6203 kivezetései hármasával párhuzamosítva. Az L297 bemeneteiről visszafelé haladva már megtaláltam a legfontosabb (Dir, Half/full, Enable) bekötéseit. Még egy kis türelem és szabadidő kérdése és meg lesz a teljes rajz! Kb 500 Ft-ból kijön a tüskesor, + pár darab szorítós csatlakozó egy nyákon. és már csak azon kell elgondolkodnom hogy mit is kezdek 8 tengellyel?
[#nyes]
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 09, 16:40
Írta: 35kpazcgr Dátum 2010 június 09, 16:40
Én is megnéztem.
Az UF4002 dióda 100V-os és 1A-os, 50ns-os.
Az L298-hoz kevés. Legalább 3A-os kell.
Az UF4002 dióda 100V-os és 1A-os, 50ns-os.
Az L298-hoz kevés. Legalább 3A-os kell.
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 09, 16:44
Írta: 35kpazcgr Dátum 2010 június 09, 16:44
Amekkora max. ampert szabályzol vele, akkora dióda is kell. Ha 5A-ert, akkor 5A-es.
Legalább a szabályozott feszültség kétszeresét kell tudni a diódának, de nem árt, ha több.
A 200V-osak már nagyon jók.
Legalább a szabályozott feszültség kétszeresét kell tudni a diódának, de nem árt, ha több.
A 200V-osak már nagyon jók.
Cím: Re:Léptetőmotor
Írta: 7ygee2vaw Dátum 2010 június 09, 18:43
Írta: 7ygee2vaw Dátum 2010 június 09, 18:43
Sziasztok
Jól gondolom,hogy 5 fázisú motort,nem lehet
bekötni a H2 vezérlőbe? Segítsetek,mivel csak 5 és 10 vezetékes motorjaim vannak.
Jól gondolom,hogy 5 fázisú motort,nem lehet
bekötni a H2 vezérlőbe? Segítsetek,mivel csak 5 és 10 vezetékes motorjaim vannak.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 június 09, 22:19
Írta: Evodiron Dátum 2010 június 09, 22:19
Oké, köszi!
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 10, 07:27
Írta: besirkyjh Dátum 2010 június 10, 07:27
Szia
Jol tudod , csak kéfázisu lehet .
Jol tudod , csak kéfázisu lehet .
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 10, 07:29
Írta: besirkyjh Dátum 2010 június 10, 07:29
Szia
Az hogy az 1A kicsi neki azt miböl tudom meg ?
Hi a jelensége ?
Az hogy az 1A kicsi neki azt miböl tudom meg ?
Hi a jelensége ?
Cím: Re:Léptetőmotor
Írta: 7ygee2vaw Dátum 2010 június 10, 08:38
Írta: 7ygee2vaw Dátum 2010 június 10, 08:38
Szia
Köszönöm,akkor majd megválok tőlük.
Köszönöm,akkor majd megválok tőlük.
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 10, 12:17
Írta: 35kpazcgr Dátum 2010 június 10, 12:17
Mivel a PWM-es meghajtás miatt az ún. szabadonfutó dióda az impulzusszünetben (kikapcsolt végfok esetén) a motor tekercsében indukálódó feszültség hatására létrejövő áramot cirkuláltatja, azaz biztosítja a zárt áramkört a tárolt mágneses energia ciklikus levezetésére, ezért kell lagalább akkora áramú és gyors dióda, mint amit a meghajtó IC szolgáltatni tud.
Namost, ha a te motorod árama nem nagyobb, mint 1A, akkor tehetsz be 1A-os diódát is, nem lesz semmi probléma mindaddig, amíg egy nagyobb motort rá nem kapcsolsz.
Namost, ha a te motorod árama nem nagyobb, mint 1A, akkor tehetsz be 1A-os diódát is, nem lesz semmi probléma mindaddig, amíg egy nagyobb motort rá nem kapcsolsz.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 június 10, 12:21
Írta: s7manbs8 Dátum 2010 június 10, 12:21
Valószínűleg jobban fog melegedni is, mint kellene és egy idő után nem bírja a kiképzést.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 június 10, 13:29
Írta: svejk Dátum 2010 június 10, 13:29
Csak hirtelen ötlet, rakj be belőle 4-5-öt párhuzamosan. Elvégre van belőle neked sok és olcsó :)
Aztán majd látod az együtt futásokat.
Aztán majd látod az együtt futásokat.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 10, 14:10
Írta: besirkyjh Dátum 2010 június 10, 14:10
8db van összesen és jéghideg pedig 1.5A-el folyamatosan van terhelve a motor ( tarto áram ).Ilyenkor nem az inpulzus terhelhetöség számit , végül is inpulzusok a step jelek nem ?
Cím: Re:Léptetőmotor
Írta: bvntiff0w Dátum 2010 június 17, 19:24
Írta: bvntiff0w Dátum 2010 június 17, 19:24
Sziasztok!
Új vagyok a fórumon, régóta tervezgetem cnc építését, de csak mostanában van időm rá. Na meg elment sok idő a fórum átolvasására[#buck] rengeteg tervet agyaltam ki a mechanikára papíron, de az elektronikával akarok kezdeni, mivel nem értek hozzá kapcsolás tervezés szintjén, de forrasztani szeretek. Nos az sla7062 vagy tb6560-t néztem ki, de az L297-L298 megoldás is érdekel csak azt bonyolultnak láttam. De nyákterv, alkatrész lista alapján megtudom csinálni. Eddig van 2db megfelelő motorom (Step-Syn 3.9V/1.35A, Robotron SPA 52/60)és több kicsi.A (pici)gép alkatrészeihez még keresek marós emberkét aki debreceni.
üdv..
Új vagyok a fórumon, régóta tervezgetem cnc építését, de csak mostanában van időm rá. Na meg elment sok idő a fórum átolvasására[#buck] rengeteg tervet agyaltam ki a mechanikára papíron, de az elektronikával akarok kezdeni, mivel nem értek hozzá kapcsolás tervezés szintjén, de forrasztani szeretek. Nos az sla7062 vagy tb6560-t néztem ki, de az L297-L298 megoldás is érdekel csak azt bonyolultnak láttam. De nyákterv, alkatrész lista alapján megtudom csinálni. Eddig van 2db megfelelő motorom (Step-Syn 3.9V/1.35A, Robotron SPA 52/60)és több kicsi.A (pici)gép alkatrészeihez még keresek marós emberkét aki debreceni.
üdv..
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 18, 06:39
Írta: besirkyjh Dátum 2010 június 18, 06:39
Üdvözlünk a forumon ( szomszéd ):)
Pár dolgot még irhatnál az elképzelésedröl .
Mit szeretnél maratni ?
Pár dolgot még irhatnál az elképzelésedröl .
Mit szeretnél maratni ?
Cím: Re:Léptetőmotor
Írta: kozo Dátum 2010 június 18, 07:32
Írta: kozo Dátum 2010 június 18, 07:32
Szevasztok!
Frakk...
Volt alkalmam megépíteni a SLA7062 L297 TB6560 ICs mindhárom vezérlőt. Szegényes ismereteim alapján a SLA7062 es ajánlanám . Én azzal nagyon ki voltam békülve.De csak unipoláris vagy univerzális motorokat tudsz vele hajtani.Később, motorcsere esetén szűkül a választási kör.
Frakk...
Volt alkalmam megépíteni a SLA7062 L297 TB6560 ICs mindhárom vezérlőt. Szegényes ismereteim alapján a SLA7062 es ajánlanám . Én azzal nagyon ki voltam békülve.De csak unipoláris vagy univerzális motorokat tudsz vele hajtani.Később, motorcsere esetén szűkül a választási kör.
Cím: Re:Léptetőmotor
Írta: bvntiff0w Dátum 2010 június 18, 13:31
Írta: bvntiff0w Dátum 2010 június 18, 13:31
Hali
Egy nyák maró,gravír gép jó lenne, de a cél egy alu maró,olyasmi mint Vbodi fórumtárs piros gépe.
A gravír gépet köracél vezetékekkel gondoltam, olcsó kezdésnek és kis géphez elég is.
A motorjaim unipolárisak.
Egy nyák maró,gravír gép jó lenne, de a cél egy alu maró,olyasmi mint Vbodi fórumtárs piros gépe.
A gravír gépet köracél vezetékekkel gondoltam, olcsó kezdésnek és kis géphez elég is.
A motorjaim unipolárisak.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 18, 17:16
Írta: 000000000 Dátum 2010 június 18, 17:16
Én, amikor építettem a gépemet, elősször megcsináltam a mechanikát és utána választottam ki a hozzávaló motorokat. Ezt tanácsolom Neked is.
Cím: Re:Léptetőmotor
Írta: Varga Ferenc Dátum 2010 június 18, 18:06
Írta: Varga Ferenc Dátum 2010 június 18, 18:06
Üdv.
Mielőtt a vezérlőhőz kezdel nagyon érdeklődjél minden után.Ez legyen tipus, alkatrész , kapcsolásirajz vagy kész vezérlő mert az egyszerü és olcsó is lehet drága és használhatatlan.(Saját tapasztalat)
Dönzsd el mihez szeretnéd használni a gépet marástol függöen válasz mechanikát.
Az enyém egy butorlapból és fióksinből összeállított gép és fázisvezérelt vezérlőt használok (készül az L297-298 páros),de én csak modellezéshez használom ,max 2mm-es maróval konturmarást és balzába.
Igaz, beleengettem a rézbe, kis fogásokkal egész szépen gravírozott.Ha Debreceni vagy
Zoli ségít, nekem is sokat segített.
Mielőtt a vezérlőhőz kezdel nagyon érdeklődjél minden után.Ez legyen tipus, alkatrész , kapcsolásirajz vagy kész vezérlő mert az egyszerü és olcsó is lehet drága és használhatatlan.(Saját tapasztalat)
Dönzsd el mihez szeretnéd használni a gépet marástol függöen válasz mechanikát.
Az enyém egy butorlapból és fióksinből összeállított gép és fázisvezérelt vezérlőt használok (készül az L297-298 páros),de én csak modellezéshez használom ,max 2mm-es maróval konturmarást és balzába.
Igaz, beleengettem a rézbe, kis fogásokkal egész szépen gravírozott.Ha Debreceni vagy
Zoli ségít, nekem is sokat segített.
Cím: Re:Léptetőmotor
Írta: bvntiff0w Dátum 2010 június 18, 18:39
Írta: bvntiff0w Dátum 2010 június 18, 18:39
Köszönöm a tanácsokat.
Az első gépem hasonló lesz a Lumenlab gépéhez.
Léptető motorokat még kukáznom kell valahonnan,legalábbis 1-et mindenképp.
Az hogy melyik vezérlőt építem meg, az jóformán tőletek függ:D
Az első gépem hasonló lesz a Lumenlab gépéhez.
Léptető motorokat még kukáznom kell valahonnan,legalábbis 1-et mindenképp.
Az hogy melyik vezérlőt építem meg, az jóformán tőletek függ:D
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 18, 20:30
Írta: besirkyjh Dátum 2010 június 18, 20:30
Szia
Az emlitett vezérlök közül csak az SLA7062 az unipoláris , ez a legjobb vállasztás a léptecseidhez .
Nem érhet meglepetés ha a Bodi által javasolt modszert követed ( elsö a mechanika ) .
Tudunk találkozni nálam ( kis bolt 50m-re , sör mindig van ) :)
Az emlitett vezérlök közül csak az SLA7062 az unipoláris , ez a legjobb vállasztás a léptecseidhez .
Nem érhet meglepetés ha a Bodi által javasolt modszert követed ( elsö a mechanika ) .
Tudunk találkozni nálam ( kis bolt 50m-re , sör mindig van ) :)
Cím: Re:Léptetőmotor
Írta: bvntiff0w Dátum 2010 június 18, 20:45
Írta: bvntiff0w Dátum 2010 június 18, 20:45
Remek[#smile]
Akkor elkezdem a lineáris csapágyak beszerzését. Találtam olcsó kínait egy csapágyboltban, kezdésnek jó lesz. Ehhez az ic-hez van esetleg egy tuti rajz amit megépíthetek? találtam többet is, de nem tudom hogy melyik a tuti.
Akkor elkezdem a lineáris csapágyak beszerzését. Találtam olcsó kínait egy csapágyboltban, kezdésnek jó lesz. Ehhez az ic-hez van esetleg egy tuti rajz amit megépíthetek? találtam többet is, de nem tudom hogy melyik a tuti.
Cím: Re:Léptetőmotor
Írta: may47wb Dátum 2010 június 18, 20:47
Írta: may47wb Dátum 2010 június 18, 20:47
Most csináltatok sla7062-es vezérlőhöz nyákokat.
Ha érdekel jelezd.
A vezérlőmet megnézheted az épül a gépem..Nemes János témába.
Ha érdekel jelezd.
A vezérlőmet megnézheted az épül a gépem..Nemes János témába.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 18, 20:52
Írta: besirkyjh Dátum 2010 június 18, 20:52
Itt a jo lehetöség .
Feltétlen keresd a Jánost .
Milyen lineárokat szerzel ?
Feltétlen keresd a Jánost .
Milyen lineárokat szerzel ?
Cím: Re:Léptetőmotor
Írta: bvntiff0w Dátum 2010 június 18, 21:00
Írta: bvntiff0w Dátum 2010 június 18, 21:00
LME20UU nevezetű poliamid kosaras.
Paulus a bolt neve.
Paulus a bolt neve.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 18, 22:02
Írta: besirkyjh Dátum 2010 június 18, 22:02
Nincs valami linked rola ?
Használd a " Válsz " gombot .
Majd megszokod :)
Használd a " Válsz " gombot .
Majd megszokod :)
Cím: Re:Léptetőmotor
Írta: bvntiff0w Dátum 2010 június 18, 22:07
Írta: bvntiff0w Dátum 2010 június 18, 22:07
Keresd a cikkneveknél lineáris csapágy.Itt
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 19, 08:14
Írta: besirkyjh Dátum 2010 június 19, 08:14
Szia
Hétfön elmegyek bemutatkozni , itt van tölem 300m-re .
Azért még nézz körül a Bearings-nél is a Galamb utcán ( HI-WIN )jo áron tudnak adni ( szintén távol keleti ) lineket .Persze van profi cucc náluk is .
Hétfön elmegyek bemutatkozni , itt van tölem 300m-re .
Azért még nézz körül a Bearings-nél is a Galamb utcán ( HI-WIN )jo áron tudnak adni ( szintén távol keleti ) lineket .Persze van profi cucc náluk is .
Cím: Re:Léptetőmotor
Írta: bvntiff0w Dátum 2010 június 19, 12:26
Írta: bvntiff0w Dátum 2010 június 19, 12:26
Hali
Én is elnézek, kíváncsi vagyok nem csak elírás e az a 800ft-os csapágy:D
Ebben a megoldásban is gondolkodtam, de nem tudom honnan lehetne beszerezni.

Én is elnézek, kíváncsi vagyok nem csak elírás e az a 800ft-os csapágy:D
Ebben a megoldásban is gondolkodtam, de nem tudom honnan lehetne beszerezni.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 19, 17:12
Írta: besirkyjh Dátum 2010 június 19, 17:12
Szia
Keresd a NET-en a "HEPCO " termékeket , amugy Pesten a TAMKER forgalmazza Öket , de csak kökemény anyagiakkal rendelkezöknek .
Keresd a NET-en a "HEPCO " termékeket , amugy Pesten a TAMKER forgalmazza Öket , de csak kökemény anyagiakkal rendelkezöknek .
Cím: Re:Léptetőmotor
Írta: bvntiff0w Dátum 2010 június 19, 17:59
Írta: bvntiff0w Dátum 2010 június 19, 17:59
Ezek a "kapugörgők" olyan drágák lennének?
Pedig tetszik a megoldás ha axiálisan jól bírja.
A te géped is nagyon tetszik. 20mm-es alátámasztott vezetékre gondoltam mint legolcsóbb megoldás,bár nem tudom hogy a hasított csapágy drágább e.
Pedig tetszik a megoldás ha axiálisan jól bírja.
A te géped is nagyon tetszik. 20mm-es alátámasztott vezetékre gondoltam mint legolcsóbb megoldás,bár nem tudom hogy a hasított csapágy drágább e.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 19, 21:12
Írta: 000000000 Dátum 2010 június 19, 21:12
Halihó.
Érdeklődnék hogy meddig képesek elviselni a léptető motorok a melegedést? Jelenleg van 3 db StepSyn léptetőmotorom ami 24V-ot kap. Ma próbáltam álló helyzetben mérni a hőmérsékletét (Lézeres mérővel) és a következőt kaptam:
5 perc - 26,5C
10 perc - 30 C
15 perc - 38,7C
20 perc - 47,6C
25 perc - 52,5C
30 perc - 56,2C
Volt olyan motor ami elérte a 61 C-t is. Tudtok valami jó megoldást hogyan lehetne őket hűteni? A feszültséget nem szeretném visszavenni. Gondolkodtam rajta hogy teszek mindegyikre egy 5-5 cm-es ventillátort de lövésem sincs hogy mire öszpontosítsam a levegőt vagy hogy konkrétan hogy fogassam fel. Ha valaki tud ötletileg szolgálni képpel azt megköszönném!
Érdeklődnék hogy meddig képesek elviselni a léptető motorok a melegedést? Jelenleg van 3 db StepSyn léptetőmotorom ami 24V-ot kap. Ma próbáltam álló helyzetben mérni a hőmérsékletét (Lézeres mérővel) és a következőt kaptam:
5 perc - 26,5C
10 perc - 30 C
15 perc - 38,7C
20 perc - 47,6C
25 perc - 52,5C
30 perc - 56,2C
Volt olyan motor ami elérte a 61 C-t is. Tudtok valami jó megoldást hogyan lehetne őket hűteni? A feszültséget nem szeretném visszavenni. Gondolkodtam rajta hogy teszek mindegyikre egy 5-5 cm-es ventillátort de lövésem sincs hogy mire öszpontosítsam a levegőt vagy hogy konkrétan hogy fogassam fel. Ha valaki tud ötletileg szolgálni képpel azt megköszönném!
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2010 június 19, 21:39
Írta: s5f8tmfv3 Dátum 2010 június 19, 21:39
Nekem anno itt a fórumon segítettek ezügyben, egy ilyen hűtő képében. Ezt már akár lehetne ventillátorral is hűteni, de nálam eddig nem kellett.
Pontos határhőfokot nehéz mondani, ahogy Magi úr mondta: "hideg motor csak a polcon van..."
Pontos határhőfokot nehéz mondani, ahogy Magi úr mondta: "hideg motor csak a polcon van..."
Cím: Re:Léptetőmotor
Írta: 9pk59nuy Dátum 2010 június 19, 21:42
Írta: 9pk59nuy Dátum 2010 június 19, 21:42
A vezérlődön van "féláram" ?
Ha nem hajtod a motort, akkor le kell venni az áramerősséget. Úgy kell beállítani, hogy automatikus legyen. Az EMCO gépeken G kód van erre.
Ha nem hajtod a motort, akkor le kell venni az áramerősséget. Úgy kell beállítani, hogy automatikus legyen. Az EMCO gépeken G kód van erre.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 19, 22:10
Írta: besirkyjh Dátum 2010 június 19, 22:10
Szia
Nem kell megijedni ez már majdnem az üzemi höfok :)
Saját példa : saját készitésü unipoláris vezérlö 50V-rol üzemeltetve és annyira lefoglalt a mechanika hogy elfeledkeztem a léptecsröl .Szaga lett ( nem éget szag csak szag ) s megfogni már nemlehetett ilyedtemmben vizes törülközöt tettem rá ami gözölt ( nem vicc ) a léptecset azota is használom minden hiba nélkül .
Ha a tarto áram jol be van állitva akkor nem megy 40-50fok fölé , ezért nem kell hüteni .Ha magasabb a höfok a mágnesek is vesztenek az erejükböl tehát nincs értelme a nagyobb tarto áram állitásnak mert üzemközben melegszik ( ilyenkor semmit nem ér a pihentetés ) és ha tul melegszik akkor blokkolni fogja a mechanikát .
Ugy szoktam hogy kézzel még éppen megfoghato .
Biztos van "tudományos " leirás is de ezek az én tapasztalataim a tulzott melegedés semminek nem használ ( csapágyak , tengelykapcsolok stb)
Nem kell megijedni ez már majdnem az üzemi höfok :)
Saját példa : saját készitésü unipoláris vezérlö 50V-rol üzemeltetve és annyira lefoglalt a mechanika hogy elfeledkeztem a léptecsröl .Szaga lett ( nem éget szag csak szag ) s megfogni már nemlehetett ilyedtemmben vizes törülközöt tettem rá ami gözölt ( nem vicc ) a léptecset azota is használom minden hiba nélkül .
Ha a tarto áram jol be van állitva akkor nem megy 40-50fok fölé , ezért nem kell hüteni .Ha magasabb a höfok a mágnesek is vesztenek az erejükböl tehát nincs értelme a nagyobb tarto áram állitásnak mert üzemközben melegszik ( ilyenkor semmit nem ér a pihentetés ) és ha tul melegszik akkor blokkolni fogja a mechanikát .
Ugy szoktam hogy kézzel még éppen megfoghato .
Biztos van "tudományos " leirás is de ezek az én tapasztalataim a tulzott melegedés semminek nem használ ( csapágyak , tengelykapcsolok stb)
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 19, 22:17
Írta: besirkyjh Dátum 2010 június 19, 22:17
Kapugörgök :)?
Ezzel vérig sértenél bármilyen forgalamzot .
Precizios nagy sebességü lineár technika .
Pozicionálásra ritkán használják( kivéve én ) inkább konvejorokat épitenek belöle mert az iveket is gond nélkül tugyja .
Nem tudom hogy milyen lehet az a 800ft-os csapágy de nem is azzal van a gond hanem a többivel ami ugyan ez a méret és 9000ft felett van az ára .
Ezzel vérig sértenél bármilyen forgalamzot .
Precizios nagy sebességü lineár technika .
Pozicionálásra ritkán használják( kivéve én ) inkább konvejorokat épitenek belöle mert az iveket is gond nélkül tugyja .
Nem tudom hogy milyen lehet az a 800ft-os csapágy de nem is azzal van a gond hanem a többivel ami ugyan ez a méret és 9000ft felett van az ára .
Cím: Re:Léptetőmotor
Írta: bvntiff0w Dátum 2010 június 19, 22:45
Írta: bvntiff0w Dátum 2010 június 19, 22:45
Az szép. Iko márkából nekem 5700ft-ot mondtak.
Nem tudsz véletlenül egy pc turit?
Szereznem kéne egy motort.
Nem tudsz véletlenül egy pc turit?
Szereznem kéne egy motort.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 19, 22:54
Írta: besirkyjh Dátum 2010 június 19, 22:54
Milyen motort ?
Árban a HI-WIN vagy a Vatera a jo .
Árban a HI-WIN vagy a Vatera a jo .
Cím: Re:Léptetőmotor
Írta: bvntiff0w Dátum 2010 június 19, 23:12
Írta: bvntiff0w Dátum 2010 június 19, 23:12
Egy ezekhez illőt Step-Syn 3.9V/1.35A, Robotron SPA 52/60
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 20, 05:44
Írta: besirkyjh Dátum 2010 június 20, 05:44
Szia
Szerintem lessz nálam ilyesmi .
Hány vezetékesek ezek ?
Dobj egy mailt és megbeszéljük hogy mikor tudsz feljönni .
Szerintem lessz nálam ilyesmi .
Hány vezetékesek ezek ?
Dobj egy mailt és megbeszéljük hogy mikor tudsz feljönni .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 20, 09:55
Írta: 000000000 Dátum 2010 június 20, 09:55
A motorok Step-Syn 3.9V/1.35A. 1.2A és 24V-ot kap. Nekem egy 4 tengelyes TB6560-as vezérlőm van (gyári). Nem tudom hogy lehet a tartóáramot korlátozni :(. Lehet vissza kellene venni olyan 16V környékére a feszültségeket és akkor nem melegedne ennyire.
Cím: Re:Léptetőmotor
Írta: bvntiff0w Dátum 2010 június 20, 13:19
Írta: bvntiff0w Dátum 2010 június 20, 13:19
Az nem unipoláris motor?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 20, 13:35
Írta: besirkyjh Dátum 2010 június 20, 13:35
Szia
A tartoáramnak nincs köze a feszültséghez .
Hagy ott a 24V-on .
Jumperrel lehet állitani a tartoáramot a 6560-nál .Milyen verziod van ( kékszinü vagy H2)
Ha tényleg 1.2A-t és 24V-ot kap az a léptetö amit irtál és jol is van bekötve akkor defektes a höméröd .
Annyit nézz már meg a vezérlön hogy a sönt ellenálások milyen értéküek ( mi van rá irva? ).
A léptetök hány vezetékesek ?
A tartoáramnak nincs köze a feszültséghez .
Hagy ott a 24V-on .
Jumperrel lehet állitani a tartoáramot a 6560-nál .Milyen verziod van ( kékszinü vagy H2)
Ha tényleg 1.2A-t és 24V-ot kap az a léptetö amit irtál és jol is van bekötve akkor defektes a höméröd .
Annyit nézz már meg a vezérlön hogy a sönt ellenálások milyen értéküek ( mi van rá irva? ).
A léptetök hány vezetékesek ?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 20, 13:36
Írta: besirkyjh Dátum 2010 június 20, 13:36
Szia
Ha nem öt vezetékes akkor jo lessz .
Ha nem öt vezetékes akkor jo lessz .
Cím: Re:Léptetőmotor
Írta: designr Dátum 2010 június 20, 14:00
Írta: designr Dátum 2010 június 20, 14:00
Bizony ha az 1.2A-es motorra,tartóáram nélküli vezérlővel pl 1,75A-t adsz,az álló helyzetben megfőzi magát.Mekkora áramot állítottál be rajta.H2-n tudod állítani,kék.piros vateráson nem a tartóáramot..Jó a magyar..
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 20, 17:32
Írta: besirkyjh Dátum 2010 június 20, 17:32
Szia
Ugy értelemztem hogy 1.35A-es a léptetö és 1.2A van állitva és 24V-rol megy.
Hogy hogy nem lehet állitani a Vateráson ? ( még nem láttam ilyet közelröl ).
Ugy értelemztem hogy 1.35A-es a léptetö és 1.2A van állitva és 24V-rol megy.
Hogy hogy nem lehet állitani a Vateráson ? ( még nem láttam ilyet közelröl ).
Cím: Re:Léptetőmotor
Írta: designr Dátum 2010 június 20, 18:04
Írta: designr Dátum 2010 június 20, 18:04
Igen,lehet így érti,viszont ezeken csak a hajtóáramot tudja állítani a teljes áram 25-50-75-100% ra.Tehát vagy 0.7A vagy 1.75-öt adsz neki..A tartó(vagy más néven pihentető)áramot nem tudod állítani,tehát ha az egyik motorod keveset dolgozik mert nem diagonálba marsz reliffet,akkor az melegszik..De várjuk meg milyen a vezérlő..
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 20, 18:13
Írta: besirkyjh Dátum 2010 június 20, 18:13
Iegen ezt észre vettem a H2-nél is , volt olyan léptetöm aminek az eggyik állás kevés volt a másik meg sok .
Ezért kérdeztem a sönt ellenálás értékét ( nem valoszinü hogy 0.15ohm van benne ).
Ezért kérdeztem a sönt ellenálás értékét ( nem valoszinü hogy 0.15ohm van benne ).
Cím: Re:Léptetőmotor
Írta: designr Dátum 2010 június 20, 18:18
Írta: designr Dátum 2010 június 20, 18:18
Munkahelyen vagyok nem tudom megnézni..de hallottam már hogy sönt cserével akarták adott motorhoz illeszteni..legjobb lenne persze valami potméteres állíthatóság..vagy a motorral párhuzamosan valami terhelést?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 20, 20:11
Írta: besirkyjh Dátum 2010 június 20, 20:11
Lehet fixen is a sönt( I=0,5V/Rs )a 0,5Volt az a limit feszültség amit az IC figyel .Ezek szerint az 1,35A-es léptetöhöz 0,37Ohm kellene de a 0,33Ohm a kereskedelmi méret és ezzel 1,51A lessz a tartoáram .Bár az meg van most is ha lehet jumperelni .
Kilehet számolni hogy pont oda essen ami jo a motornak .
Potmétert probáltam ( nem sikerült ) de a pihentetés megoldhato .
Kilehet számolni hogy pont oda essen ami jo a motornak .
Potmétert probáltam ( nem sikerült ) de a pihentetés megoldhato .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 20, 22:08
Írta: 000000000 Dátum 2010 június 20, 22:08
Nos. Akkor válaszolok sorba a kérdésekre. Nem a Vaterán vettem de azonos vele. Kék színű van amin 6 db kapcsoló van. 0.5A - 2.5A-es verzió és nem a 1.5A - 3A-es. Ebben az ellenállások kissebbek mint a nagytestvérben. Kb ennyiben tér el a két vezérlő egymástól.
A vezérlőt úgy állítottam be hogy 1,2A adjon minden motorra. 1.35A-r van a motorokra írva úgyhogy alulterveztem. Viszont azt észrevettem hogy ha dolgoznak akkor nem is melegednek annyira mint álló helyzetben. A másik dolog hogy nem értem hogy a két középső kapcsoló mit határoz meg.. Mert ugye van olyan hogy FAST, 25%, 50%, SLOW...
A motorjaim 6 vezetékesek és úgy vannak bekötve hogy a középső vezetékek ki lettek hagyva. Ezt ajánlja a használati utasítása is nagy nyomatékhoz.( Egyébként a vezrélő képes kezelni 4,6,8 vezetékes motort is).
A mai alkotásom a hűtésre irányult. Megpróbálom feltenni a képeket hátha másoknak valami hasznos infóval szolgálnak ha ilyen problémával állnak szemben. Az elv egyszerű. Megpróbáltam hűtőfelületet varázsolni a motorokra. Irány Praktiker ugyanis csak az van Vasárnap nyitva vettem 2m 1cm x 1cm-es U profilu aluminimum élvédő vagy mi a fenét :). Vágdostam belőle 4,5cm-es darabokat és a két végét felragasztottam a motorokra, a közte lévő rést pedig informatikában is használt hőátadó pasztával töltöttem ki. A motoroktól átveszi a hőt mostmár csak egy 8cm-es ventillátort kell mindegyik motorra felbajlágolni. :) Remélem így 60 fok alá tudom vinni a motorokat. Most olyan 62-63C körül mozognak ha egyfolytában állnak 30 percig. Ha mozognak akkor elkezdenek hűlni.
A vezérlőt úgy állítottam be hogy 1,2A adjon minden motorra. 1.35A-r van a motorokra írva úgyhogy alulterveztem. Viszont azt észrevettem hogy ha dolgoznak akkor nem is melegednek annyira mint álló helyzetben. A másik dolog hogy nem értem hogy a két középső kapcsoló mit határoz meg.. Mert ugye van olyan hogy FAST, 25%, 50%, SLOW...
A motorjaim 6 vezetékesek és úgy vannak bekötve hogy a középső vezetékek ki lettek hagyva. Ezt ajánlja a használati utasítása is nagy nyomatékhoz.( Egyébként a vezrélő képes kezelni 4,6,8 vezetékes motort is).
A mai alkotásom a hűtésre irányult. Megpróbálom feltenni a képeket hátha másoknak valami hasznos infóval szolgálnak ha ilyen problémával állnak szemben. Az elv egyszerű. Megpróbáltam hűtőfelületet varázsolni a motorokra. Irány Praktiker ugyanis csak az van Vasárnap nyitva vettem 2m 1cm x 1cm-es U profilu aluminimum élvédő vagy mi a fenét :). Vágdostam belőle 4,5cm-es darabokat és a két végét felragasztottam a motorokra, a közte lévő rést pedig informatikában is használt hőátadó pasztával töltöttem ki. A motoroktól átveszi a hőt mostmár csak egy 8cm-es ventillátort kell mindegyik motorra felbajlágolni. :) Remélem így 60 fok alá tudom vinni a motorokat. Most olyan 62-63C körül mozognak ha egyfolytában állnak 30 percig. Ha mozognak akkor elkezdenek hűlni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 20, 22:11
Írta: 000000000 Dátum 2010 június 20, 22:11
A képek lemaradtak:)


Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 20, 22:31
Írta: besirkyjh Dátum 2010 június 20, 22:31
Szia
A két középsö kapcsolonak a Macnál nincs értelme a beérkezö step jelek le és felfutását lassitja vagy gyorsitja ( ha ki lehet kapvsolni tedd azt) a motortuningban szépen be lehet állitani ( balrol a 3-ik rublika ).Ahogy most van kötve a léptetöd kis sebességen nagyobb a nyomatéka de ezzel limitálod a max fordulatot .
Meg ér egy probát a középsö és valamelyik szélsö vezeték kötése a vezérlöre .Viszont azt nem értem hogy ha ugy vankötve ahogy irod akkor meg tutira nem kéne hogy melegedjen .Hiányzik a pihentetés .Á inkább hagyd igy mert nemtudom hoy hogy fog viselkedni a vezérlö a kissebb ellenálásu tekercsekre .
A vezérlö nem melegszik ? Valami nem stimmel.
Az hogy menetközben hül az normális de az hogy 1.2A-re állitod az 1.35-ös léptetöt és mégis nagyon meleg az nekem nem tetszik .
Mekkora a sönt értéke ?
A két középsö kapcsolonak a Macnál nincs értelme a beérkezö step jelek le és felfutását lassitja vagy gyorsitja ( ha ki lehet kapvsolni tedd azt) a motortuningban szépen be lehet állitani ( balrol a 3-ik rublika ).Ahogy most van kötve a léptetöd kis sebességen nagyobb a nyomatéka de ezzel limitálod a max fordulatot .
Meg ér egy probát a középsö és valamelyik szélsö vezeték kötése a vezérlöre .Viszont azt nem értem hogy ha ugy vankötve ahogy irod akkor meg tutira nem kéne hogy melegedjen .Hiányzik a pihentetés .Á inkább hagyd igy mert nemtudom hoy hogy fog viselkedni a vezérlö a kissebb ellenálásu tekercsekre .
A vezérlö nem melegszik ? Valami nem stimmel.
Az hogy menetközben hül az normális de az hogy 1.2A-re állitod az 1.35-ös léptetöt és mégis nagyon meleg az nekem nem tetszik .
Mekkora a sönt értéke ?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 20, 22:39
Írta: 000000000 Dátum 2010 június 20, 22:39
Hát nemtudom mi lehet a baj. A vezrélő nem melegszik az hűtve van egy szép ventillátorral. 0.22Ohm-os söntök vannak benne gyárilag a vezérlőben. Mellékelem a két PDF-et amit kaptam hozzá.
A motorokra eső Ampert is innen számoltam ki a köv képlettel:
Current=0.5+(2/3)x(percentage/25%-1)
A gyári példában pont a 1.2A volt megadva. Úgy gondoltam az nekem is megfelelő lesz a motorokra.
A motorok sebességével nincs problémám így 24 V-on. Viszont az nem tetszik nekem hogy ha 12V-ra visszaveszem a feszt akkor nem melegednek de erő sincs bennük (Konkrétan kézzel eltudom forgatni a tengelyeket úgy hogy elvileg tartóáram van rajtuk)
A motorokra eső Ampert is innen számoltam ki a köv képlettel:
Current=0.5+(2/3)x(percentage/25%-1)
A gyári példában pont a 1.2A volt megadva. Úgy gondoltam az nekem is megfelelő lesz a motorokra.
A motorok sebességével nincs problémám így 24 V-on. Viszont az nem tetszik nekem hogy ha 12V-ra visszaveszem a feszt akkor nem melegednek de erő sincs bennük (Konkrétan kézzel eltudom forgatni a tengelyeket úgy hogy elvileg tartóáram van rajtuk)
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 20, 22:54
Írta: besirkyjh Dátum 2010 június 20, 22:54
A 0.22 az jo és ennek az 50%-át használod ( 1.14A ) .12V-on is menni kéne neki , nálam már 8 voltnál is megy szépen .
Hát igen azért nem melegszenek mert erö sincs bennük .Hány vol megy a léptetökre ha álnak ?Meg tudod mérni ?
Hol van az a pdf ?
Hát igen azért nem melegszenek mert erö sincs bennük .Hány vol megy a léptetökre ha álnak ?Meg tudod mérni ?
Hol van az a pdf ?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 20, 23:25
Írta: 000000000 Dátum 2010 június 20, 23:25
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 21, 07:18
Írta: besirkyjh Dátum 2010 június 21, 07:18
Szia
Hát , biztos vagyok benne hogy nem ez lessz az eggyetlen vezérlöd ( 24V max 200-as rámpa ) sok sok idö veszteség ezek miatt föleg reliefeknél .
Jo lenne tudni mivel bolonditják meg hogy 24V-nál már fözi a motort 35V-nál sem csinálja ( lásd H2 ) eddig azt hittem hogy ezekkel az IC-kel csak egy fajta vezérlö készithetö. Valoszinü nagyobb feszültséget küldenek a léptetökre (ami táp függö ) és ezért van az hogy szelektálják a léptetöket ( Nema 17 , Nema 23 , Nema 34 ).Ne haragugyj de ebben nemtudok segiteni , marad a hütöbordás megoldás !
Azért ha már beált a höfok kiváncsi lennék a max gyorsitására és a max munka sebességére .
Hát , biztos vagyok benne hogy nem ez lessz az eggyetlen vezérlöd ( 24V max 200-as rámpa ) sok sok idö veszteség ezek miatt föleg reliefeknél .
Jo lenne tudni mivel bolonditják meg hogy 24V-nál már fözi a motort 35V-nál sem csinálja ( lásd H2 ) eddig azt hittem hogy ezekkel az IC-kel csak egy fajta vezérlö készithetö. Valoszinü nagyobb feszültséget küldenek a léptetökre (ami táp függö ) és ezért van az hogy szelektálják a léptetöket ( Nema 17 , Nema 23 , Nema 34 ).Ne haragugyj de ebben nemtudok segiteni , marad a hütöbordás megoldás !
Azért ha már beált a höfok kiváncsi lennék a max gyorsitására és a max munka sebességére .
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2010 június 21, 07:45
Írta: Egyújabbgépépítő Dátum 2010 június 21, 07:45
Elnézést hogy beleszólok, de a két középső kapcsoló (Decay mode) nem a bemenő jellel van összefüggésbe.
Az a pwm áramlecsengését hivatott beállítani.
Az a pwm áramlecsengését hivatott beállítani.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 21, 08:12
Írta: besirkyjh Dátum 2010 június 21, 08:12
Jogos , azota átolvastam én is , de a lényegen nem változtat ( sajnos ).
[#eljen]
[#eljen]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 21, 08:20
Írta: 000000000 Dátum 2010 június 21, 08:20
A PWM lényege nem az hogy impulzusokban adja a motornak az áramot mikor egyhelyben állnak? Nem lehet hogy ha a PWM-et 50%-ra állítom nem fognak ennyire melegedni? Mert most FAST-ra állítottam így elég sűrűn kaphat impulzust a motor. (Egyébként bizonyos poziciokban hallani is lehet a tipikus amper hangot, sercegnek a motorok)
Cím: Re:Léptetőmotor
Írta: 279nwbpsa Dátum 2010 június 21, 09:03
Írta: 279nwbpsa Dátum 2010 június 21, 09:03
Szia!Azt írod lentebb,hogy a középkivezetést mellőzve,a tekercs két végét kötötted be.Nem lehet,hogy ha az egyik kivezetést és a középkivezetést használnád együtt,akkor kevésbé melegedne a motor?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 21, 12:05
Írta: besirkyjh Dátum 2010 június 21, 12:05
Ebben a kapcsolásban PWM üzemben nincs különbség állo és forgo motor között .A PWM frekvenciáját nem tudod állitani hanem ennek a ferkinek a fel és lefutását állitod a kapcsoloval (probáld ki az 50%-ot ).
Cím: Re:Léptetőmotor
Írta: neduddgi Dátum 2010 június 22, 20:05
Írta: neduddgi Dátum 2010 június 22, 20:05
üdv
UTP kábellel meg tudom hajtani a 2.5 A -es motoromat, mondjuk két szálat fogok.
Vagy felejtős?
UTP kábellel meg tudom hajtani a 2.5 A -es motoromat, mondjuk két szálat fogok.
Vagy felejtős?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 22, 22:31
Írta: besirkyjh Dátum 2010 június 22, 22:31
Szia
Megtudod persze csak ezek a csuszo érintkezös csatlakozok nem a lehjobbak ( ha lehet kerülni kell öket ) kontakt problémák lehetnek .Nálam bevált a sztereo DIN dugo ( jack ) 2A-ig használtam eddig hiba nélkül .Vagy a sorkapocs , 4polusu mikrofon dugo stb .
Nem érdemes vele kisérletezni mert a kontakt hiba megmagyarázhatatlan más hibákat tud produkálni .
Megtudod persze csak ezek a csuszo érintkezös csatlakozok nem a lehjobbak ( ha lehet kerülni kell öket ) kontakt problémák lehetnek .Nálam bevált a sztereo DIN dugo ( jack ) 2A-ig használtam eddig hiba nélkül .Vagy a sorkapocs , 4polusu mikrofon dugo stb .
Nem érdemes vele kisérletezni mert a kontakt hiba megmagyarázhatatlan más hibákat tud produkálni .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 23, 14:58
Írta: 000000000 Dátum 2010 június 23, 14:58
Sziasztok,
Mennyi az optimális üzemi hőmérséklete egy steppernek? Úgy tapasztalom, hogy hidegen nem annyira jók a paraméterei, viszont a túl meleg biztos nem tesz jót a mágneseinek, tekercselésének, talán a csapágyainak sem.
50 Celsius körül?
Mennyi az optimális üzemi hőmérséklete egy steppernek? Úgy tapasztalom, hogy hidegen nem annyira jók a paraméterei, viszont a túl meleg biztos nem tesz jót a mágneseinek, tekercselésének, talán a csapágyainak sem.
50 Celsius körül?
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 június 23, 15:06
Írta: keri Dátum 2010 június 23, 15:06
Adatlapok 60fok körüli maximális hőmérsékletet bírnak.
50fokon még biztosan nem károsodik. Ez kb. az a hőmérséklet amit már éppen nem bírsz a kezedben tartani.
A korlátozó tényező a tekercselés szigetelése.
A mágnesek 100fok felett érik el a curie pontot.
Másik gond a csapágyazás lehet.
Viszont nem értem mitől javul a motor teljesítménye? A réz hidegen jobban vezeti az áramot.
Talán a csapágy kenőanyaga ami túl sűrű hidegen és lefogja a tengelyt.
50fokon még biztosan nem károsodik. Ez kb. az a hőmérséklet amit már éppen nem bírsz a kezedben tartani.
A korlátozó tényező a tekercselés szigetelése.
A mágnesek 100fok felett érik el a curie pontot.
Másik gond a csapágyazás lehet.
Viszont nem értem mitől javul a motor teljesítménye? A réz hidegen jobban vezeti az áramot.
Talán a csapágy kenőanyaga ami túl sűrű hidegen és lefogja a tengelyt.
Cím: Re:Léptetőmotor
Írta: neduddgi Dátum 2010 június 23, 15:20
Írta: neduddgi Dátum 2010 június 23, 15:20
Köszönöm!
Természetesen sorkapoccsal lesz megoldva, csak a kábelt használom.
Természetesen sorkapoccsal lesz megoldva, csak a kábelt használom.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 24, 14:20
Írta: 000000000 Dátum 2010 június 24, 14:20
Köszönöm, akkor ezek szerint most kb. a maximális árammal hajtom a gépet.
Lehet, hogy a bemelegedésnél változnak a méretek is, és erre tervezik mechanikailag a motort.
Lehet, hogy a bemelegedésnél változnak a méretek is, és erre tervezik mechanikailag a motort.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 26, 10:58
Írta: 000000000 Dátum 2010 június 26, 10:58
Kedves fórumtársak!
Találtam egy kis boltban kétféle léptetőmotort. A neten nem találtam sehol (gyártónál is kerestem) az adatait. Bontott motornak látszik. Ha valaki tudna róla nyomaték adatot és közölné, nagyon megköszönném.
Típus: Sanyo-Denki 103G770-22 G1,
illetve Mineba CO Thailand 23LM-C329
Találtam egy kis boltban kétféle léptetőmotort. A neten nem találtam sehol (gyártónál is kerestem) az adatait. Bontott motornak látszik. Ha valaki tudna róla nyomaték adatot és közölné, nagyon megköszönném.
Típus: Sanyo-Denki 103G770-22 G1,
illetve Mineba CO Thailand 23LM-C329
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 26, 12:30
Írta: 35kpazcgr Dátum 2010 június 26, 12:30
Szia!
A Sanyo-Denki motor bipoláris üzemben 0,62 Nm-es, unipolárisan pedig 0,49 Nm-es.
A Mineba motor bipoláris üzemben szintén 0,62 Nm-es.
A Sanyo-Denki motor bipoláris üzemben 0,62 Nm-es, unipolárisan pedig 0,49 Nm-es.
A Mineba motor bipoláris üzemben szintén 0,62 Nm-es.
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 június 26, 12:36
Írta: 35kpazcgr Dátum 2010 június 26, 12:36
Itt részletes adatokat találsz ezekről a léptetőkről:
Léptető motorok
Léptető motorok
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 26, 16:41
Írta: 000000000 Dátum 2010 június 26, 16:41
Kedves Tomahawk!
Köszönöm a gyors segítséget, így megmentettél egy rossz vételtöl, mert kb. 1Nm-es kellene, és az említettekért 400Ft.-ot kértek. Ezek szerint nem érte meg. Mégegyszer köszönöm.
Köszönöm a gyors segítséget, így megmentettél egy rossz vételtöl, mert kb. 1Nm-es kellene, és az említettekért 400Ft.-ot kértek. Ezek szerint nem érte meg. Mégegyszer köszönöm.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 június 26, 16:42
Írta: 000000000 Dátum 2010 június 26, 16:42
Bocsánat 4000Ft.-ról volt szó helyesen.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 június 30, 22:38
Írta: s7manbs8 Dátum 2010 június 30, 22:38
Figyeljetek már, ha léptető motort hajtok tranzisztorokkal, vagy FET-ekkel, akkor van közte nagy különbség ? Pl. hogy az elérhető sebesség maximuma és erő tekintetében.
Olyat tapasztalok, hogy tranzisztoros végfokkal hajtott léptetőmotornál van egy motor az, kisebb, kb. 2000-ig fel tudom pörgetni 40V a táp fesz. Egy másikat, ami izmosabb, az már alig megy olyan 600-700-zal ez a maximuma, de akkor a végén természetesen egyikben sincs már erő.
Lehet, hogy nem hajtom ki rendesen a tranyókat, arra gondolok, és a nagyobb áramúnál ezért melegszenek a tranyók is, mint a disznó, a nagyobbnak is olyan 1.6A körüli az áramfelvétele, de lehet az még kevés. Majd teszek már a tekercsekkel sorba valami analóg mérőt is, kíváncsiságból.
Már csak, ami értékeket itt hallok mennyivel mennek ilyen olyan motorok, valahogy piszkosul kevesellem ezeket az értékeket.
Mintha egy adott amperhatár felett e vezérlő nem adna elég áramot... nem tudom, lehet lassan nyitnak a tranyók és nagyobb tempónál ez jön ki, a nagyobb motoroknál. Nézegetem oszcilloszkóppal is a dolgot, majd csinálok pár képet később.
Olyat tapasztalok, hogy tranzisztoros végfokkal hajtott léptetőmotornál van egy motor az, kisebb, kb. 2000-ig fel tudom pörgetni 40V a táp fesz. Egy másikat, ami izmosabb, az már alig megy olyan 600-700-zal ez a maximuma, de akkor a végén természetesen egyikben sincs már erő.
Lehet, hogy nem hajtom ki rendesen a tranyókat, arra gondolok, és a nagyobb áramúnál ezért melegszenek a tranyók is, mint a disznó, a nagyobbnak is olyan 1.6A körüli az áramfelvétele, de lehet az még kevés. Majd teszek már a tekercsekkel sorba valami analóg mérőt is, kíváncsiságból.
Már csak, ami értékeket itt hallok mennyivel mennek ilyen olyan motorok, valahogy piszkosul kevesellem ezeket az értékeket.
Mintha egy adott amperhatár felett e vezérlő nem adna elég áramot... nem tudom, lehet lassan nyitnak a tranyók és nagyobb tempónál ez jön ki, a nagyobb motoroknál. Nézegetem oszcilloszkóppal is a dolgot, majd csinálok pár képet később.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 június 30, 22:41
Írta: s7manbs8 Dátum 2010 június 30, 22:41
Mondjuk még annyit hozzáteszek, hogy előzőleg, a nyg motort olyan 20V-ról próbáltam, és akkor a sebesség maximuma arányosan még ettől is kisebb volt. AKkor örültem, ha 300-zal bírt forogni, most 40V-ról 600 kb. a határ, végül is arányosnak tűnik a fesszel. Lehet csak ennyit tud a motor ...?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 június 30, 23:28
Írta: s7manbs8 Dátum 2010 június 30, 23:28
A kisebbiket azért 3500-zal is meg tudtam most pörgetni, az egy robotron motor, 100 lépés/fordulatos felbontású.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 30, 23:44
Írta: besirkyjh Dátum 2010 június 30, 23:44
Szia
Ennyit tud a vezérlö .
Szokásos kérdés : mekkora motor , bipol vagy más stb stb? Kevésnek találom a fordulatot ,
nem oknélkül lettek a fettek használva a vezérlökben ( gyorsabb müködés , kevesebb hö , nagyobb fesz és áram ).
Hidd el nekem amiket hallasz ilyen meg olyan sebességeket azok csak forogni tudnak semmi mást , hajtásra ezek a fordulatok nem jok .Azok a méter/ percek nem mindig a fordulatbol adodnak hanem az optimalizált hajtásbol .
Vegyünk alapul egy 1Nm-es léptetöt , sokmindenre lehet használni pl: ha egy sima menetes orsot hajtol vele ( direktben pl: M10 ) akkor lessz kb 1500mm/perc sebességed ami alkalmas lehet nyákokhoz , müanyaghoz , aluhoz stb.Azért 1500mm mert ezek a léptetök forognak 1000-et simán stabilan és a nyomatékuk kb 65% annél a fordulatnál van ( ott még használhato ) .Ha ezt a motort kicseréled egy nagyobbra pl: 2Nm-re akkor ez a fordulat jocskán csökkenni fog de mivel hogy van erö tartalékod ezért nyugodtan használhatsz akár 5mm-es orsot is és igy az elöbbi sebességed akár 4m/perc is lehet ( tehát a fordulata kevesebb mégis gyorsabb a sebessége ).Bövül a felhasználás lehetösége is de a mechanikát is és a maromotort is át kell méretezni ezekhez a paraméterekhez .
A marási sebességet nem a léptetö fordulata határozza meg hanem a komplett hajtás beleértve a maroszárat is .
Csinálj egy fettes vezérlöt és meglátod hogy mi a különbség a kettö lözött.
Ennyit tud a vezérlö .
Szokásos kérdés : mekkora motor , bipol vagy más stb stb? Kevésnek találom a fordulatot ,
nem oknélkül lettek a fettek használva a vezérlökben ( gyorsabb müködés , kevesebb hö , nagyobb fesz és áram ).
Hidd el nekem amiket hallasz ilyen meg olyan sebességeket azok csak forogni tudnak semmi mást , hajtásra ezek a fordulatok nem jok .Azok a méter/ percek nem mindig a fordulatbol adodnak hanem az optimalizált hajtásbol .
Vegyünk alapul egy 1Nm-es léptetöt , sokmindenre lehet használni pl: ha egy sima menetes orsot hajtol vele ( direktben pl: M10 ) akkor lessz kb 1500mm/perc sebességed ami alkalmas lehet nyákokhoz , müanyaghoz , aluhoz stb.Azért 1500mm mert ezek a léptetök forognak 1000-et simán stabilan és a nyomatékuk kb 65% annél a fordulatnál van ( ott még használhato ) .Ha ezt a motort kicseréled egy nagyobbra pl: 2Nm-re akkor ez a fordulat jocskán csökkenni fog de mivel hogy van erö tartalékod ezért nyugodtan használhatsz akár 5mm-es orsot is és igy az elöbbi sebességed akár 4m/perc is lehet ( tehát a fordulata kevesebb mégis gyorsabb a sebessége ).Bövül a felhasználás lehetösége is de a mechanikát is és a maromotort is át kell méretezni ezekhez a paraméterekhez .
A marási sebességet nem a léptetö fordulata határozza meg hanem a komplett hajtás beleértve a maroszárat is .
Csinálj egy fettes vezérlöt és meglátod hogy mi a különbség a kettö lözött.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 június 30, 23:56
Írta: besirkyjh Dátum 2010 június 30, 23:56
Ha épitesz egy mechanikát akkor me kell nézni hogy mekkora erö kell a megmozditásához ( ugyan ugy ahogy a léptetö tartonyomatékát szoktuk nézni ) és ehez méretezed a léptetömotort .
Ha van egy mechanikád aminek 0,2Nm az hajtás igénye akor már kilehet kalkulálni a szükséges nyomatéku léptetöt hozzá .
Sokan itt usznak el mert valojában elég lenne egy 1Nm-es motor is 3mm orsoval ami kb:3m/percet eredményez de tesznek rá jo nagy duci motort aminek nyometék görbélye lényegeseb eltér a kissebbtöl és 1000fordulatnál kb ugyan akkora a maradék nyomaték mint a kissebb léptetö-é , sött sok esetben ezen a fordulaton a nagyobb léptetöknek kissebb a nyomatékuk mint a kissebb testvéreké .
Ha van egy mechanikád aminek 0,2Nm az hajtás igénye akor már kilehet kalkulálni a szükséges nyomatéku léptetöt hozzá .
Sokan itt usznak el mert valojában elég lenne egy 1Nm-es motor is 3mm orsoval ami kb:3m/percet eredményez de tesznek rá jo nagy duci motort aminek nyometék görbélye lényegeseb eltér a kissebbtöl és 1000fordulatnál kb ugyan akkora a maradék nyomaték mint a kissebb léptetö-é , sött sok esetben ezen a fordulaton a nagyobb léptetöknek kissebb a nyomatékuk mint a kissebb testvéreké .
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 július 01, 01:55
Írta: s7manbs8 Dátum 2010 július 01, 01:55
Köszi, a FET-es is tervbe van véve, csak lenne rá időm megcsinálni, most először ezt a tranyóst elemzem ki, de az oszcilloszkópos látvány alapján nem látom , hogy a FET-es miért lenne jobb, azon kívül, hogy az nem melegszik annyira esetleg, mivel a tranzisztor még mindig gyorsabban nyit jóval, mint maga a motor induktivitása ahogy engedi, inkább az a meghatározó. De majd az eredmény megmutatja, ha az is meglesz. Meg egy újfajta áramérzékelő áramkört csináltam meg és azt akarom megnézni, hogy jó e, ha megvan, akkor jön a fet-es végfok. Igazándiból elég, ennke a logikájára rácsatlakozni azzal a véggel, majd az gyakorlatilag ugyanaz lesz.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 július 01, 06:54
Írta: besirkyjh Dátum 2010 július 01, 06:54
Ezeket Te jobban tudod .
Azt hiszem azért is fet a nyerö mert a vezérléséhez nincs szükség csak picike áramra ( nem laposodik a négyszög jel ) mig a tranzisztorokat nagyob teljesitménnyel kell meg hajtani ami a fel és lefutási idö növeléséhez vezet .Biztos hogy van eltérés a két vezérlés lehetöség között .
Azt hiszem azért is fet a nyerö mert a vezérléséhez nincs szükség csak picike áramra ( nem laposodik a négyszög jel ) mig a tranzisztorokat nagyob teljesitménnyel kell meg hajtani ami a fel és lefutási idö növeléséhez vezet .Biztos hogy van eltérés a két vezérlés lehetöség között .
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 július 01, 13:30
Írta: s7manbs8 Dátum 2010 július 01, 13:30
Van egy határ, amikortól veszettül elkezd melegíteni a vezérlő végfok eleme, mikor eléri azt a mennyiségű áramot, amikor a túlfeszvédelem bekapcsol, hogy a megengedettnél ne kapjon nagyobb feszültséget, a kikapcsoláskor, ami ráadódik a tápfeszre, na ekkor szépen elkezd melegedni. Addig szinte hideg. Csinálok róla pár mérést, hogy ez mikor következik be, hány ampernél egy adott motornál, az induktivitás függő is.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 július 01, 16:08
Írta: besirkyjh Dátum 2010 július 01, 16:08
Akkor szokott nagyon melegedni ha a C - E feszültség nagy .Esetleg más tipusu tranyoval .
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 július 01, 16:21
Írta: s7manbs8 Dátum 2010 július 01, 16:21
Ez konkrétan egy SLA4030 típusú darlington array, amivel hajtom a motort. Ahogy néztem meg van rendesen nyitva a tranzisztor, amúgy se túl nagy áramú ez a motor sem, olyan 1.5A kb. a visrosszúgó fesz levezetése melegíti, amit egy külön tranzisztor csinál, ha olyan 80-90V felé menne, most kinézek a kamrába, volt egy kis analóg ampermérőm is, azt közbe iktatom, azon jobban látni az áram értékét. Most van egy kis időm a dologra. Mosat megpróbálok pár mérést megcsinálni. Összedugdosni a dolgokat.
Cím: Re:Léptetőmotor
Írta: Teaway Dátum 2010 július 01, 18:18
Írta: Teaway Dátum 2010 július 01, 18:18
Kamrába ampermérő? És hol vannak a lekvárok?[#hehe]
Cím: Re:Léptetőmotor
Írta: ptt99m53 Dátum 2010 július 01, 18:34
Írta: ptt99m53 Dátum 2010 július 01, 18:34
Sziasztok!
Egy feladat amire keresem a legjobb megoldást:
Adott egy tengely, amit léptető motorral kellene "megforgatni".
Kritériumok:
- 1 másodperc alatt hatszor kell, hogy körbeforduljon a tengely.
- 1 körbefordulást négy lépésben kell megtennie
- Az állás ideje negyede a mozgással töltött időnek, de a hajtott tengely lépését egy külső TTL jel indítja.
- lehet 1:1-es áttétel is, vagy közvetlen a léptető moci tengelyxe is...
Erre valakinek van egy jó ötlete?
Eddig egy máltai keresztmő mozgatta, ezt szeretném lépteccsel kiváltani.
Egy feladat amire keresem a legjobb megoldást:
Adott egy tengely, amit léptető motorral kellene "megforgatni".
Kritériumok:
- 1 másodperc alatt hatszor kell, hogy körbeforduljon a tengely.
- 1 körbefordulást négy lépésben kell megtennie
- Az állás ideje negyede a mozgással töltött időnek, de a hajtott tengely lépését egy külső TTL jel indítja.
- lehet 1:1-es áttétel is, vagy közvetlen a léptető moci tengelyxe is...
Erre valakinek van egy jó ötlete?
Eddig egy máltai keresztmő mozgatta, ezt szeretném lépteccsel kiváltani.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 július 01, 18:45
Írta: s7manbs8 Dátum 2010 július 01, 18:45
Nem is találtam meg azóta se, valami dobozba tettem régebben, de a lekvárral sem találkoztam :).
Cím: Re:Léptetőmotor
Írta: f35ezvjs Dátum 2010 július 08, 13:55
Írta: f35ezvjs Dátum 2010 július 08, 13:55
Sziasztok!
Keresek 3.1 Nm léptetőmotorokat. Ha van valakinek eladó keressen meg.
Köszönöm
Keresek 3.1 Nm léptetőmotorokat. Ha van valakinek eladó keressen meg.
Köszönöm
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2010 július 13, 21:48
Írta: Miki2 Dátum 2010 július 13, 21:48
Szia Tomahawk !
Belinkelted ezt a rajzot juni 7-én #2479-ben.
Kérlek, ha van rá mód, küld el nekem a teljes rajzot.
Köszönöm.
Belinkelted ezt a rajzot juni 7-én #2479-ben.
Kérlek, ha van rá mód, küld el nekem a teljes rajzot.
Köszönöm.
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 július 13, 22:03
Írta: 35kpazcgr Dátum 2010 július 13, 22:03
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2010 július 14, 11:36
Írta: Miki2 Dátum 2010 július 14, 11:36
Nagyon köszönöm.
Ez igy szinte tökéletes.
Már "csak" egy panelterv kellene, és az lenne a tökély.
Ez igy szinte tökéletes.
Már "csak" egy panelterv kellene, és az lenne a tökély.
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 július 14, 16:04
Írta: 35kpazcgr Dátum 2010 július 14, 16:04
Ezen a linken megtalálod:
http://www-users.rwth-aachen.de/Thorsten.Ostermann/i_schritt.htm
http://www-users.rwth-aachen.de/Thorsten.Ostermann/i_schritt.htm
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2010 július 14, 17:14
Írta: Miki2 Dátum 2010 július 14, 17:14
Köszönöm, megpróbálom a képek alapján rekonstruálni.
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2010 július 15, 17:38
Írta: Miki2 Dátum 2010 július 15, 17:38
Szervusz !
Megtaláltam a panel rajzokat *.PS kiterjesztéssel.
Exportáltam dxf-be, de ott egy vonalas rajzként jelet meg.
Todsz-e olyan progit, amivel konvertálható lenne olyan formátumba, hogy a panel kimarható legyen.
Megtaláltam a panel rajzokat *.PS kiterjesztéssel.
Exportáltam dxf-be, de ott egy vonalas rajzként jelet meg.
Todsz-e olyan progit, amivel konvertálható lenne olyan formátumba, hogy a panel kimarható legyen.
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 július 15, 19:13
Írta: 35kpazcgr Dátum 2010 július 15, 19:13
Mivel konvertáltad a .ps kiterjesztésű fájlokat dxf-be?
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2010 július 15, 19:22
Írta: Miki2 Dátum 2010 július 15, 19:22
Corelben megnyitottam, aztán exportáltam dxf-be.
Úgy látom, méretileg egyébként teljesen korrekt a dolog.
Úgy látom, méretileg egyébként teljesen korrekt a dolog.
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 július 15, 19:58
Írta: 35kpazcgr Dátum 2010 július 15, 19:58
A dxf-et konvertálhatod bmp-vé.
Azt pedig egy képszerkesztővel tetszőlegesen alakíthatod.
Azt pedig egy képszerkesztővel tetszőlegesen alakíthatod.
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2010 július 15, 21:40
Írta: Miki2 Dátum 2010 július 15, 21:40
A dxf-et is úgy alakítom, ahogy akarom.
Az autoCad-et már vagy 25 éve használom.
A kínlódást, a sok sziszi-fuszi munát szerettem volna elkerülmi.
Az autoCad-et már vagy 25 éve használom.
A kínlódást, a sok sziszi-fuszi munát szerettem volna elkerülmi.
Cím: Re:Léptetőmotor
Írta: ptt99m53 Dátum 2010 július 20, 09:46
Írta: ptt99m53 Dátum 2010 július 20, 09:46
Miklós,
BMP-t alakitottam dxf-re, és az autocad bár megjeleníti, nem tudom szerkeszteni. Tudsz erre a problémára megoldást?
Köszi, Iswtván
BMP-t alakitottam dxf-re, és az autocad bár megjeleníti, nem tudom szerkeszteni. Tudsz erre a problémára megoldást?
Köszi, Iswtván
Cím: Re:Léptetőmotor
Írta: Arany János Dátum 2010 július 25, 21:07
Írta: Arany János Dátum 2010 július 25, 21:07
Mivel ebben a topikban kezdődött, itt szeretném megköszönni Kulcsár Zolinak a rengeteg türelmet és óriási segítőkészséget aminek eredményeképpen
ma délután elindult első saját építésű vezérlőm.
Nagyon köszönöm Zoli!!!
ma délután elindult első saját építésű vezérlőm.
Nagyon köszönöm Zoli!!!
Cím: Re:Léptetőmotor
Írta: Varga Ferenc Dátum 2010 július 26, 08:32
Írta: Varga Ferenc Dátum 2010 július 26, 08:32
Szerintem sokan mondhatnak köszönetet az ügyeletes tanácsadónak.
Köztük én is.
Köztük én is.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 július 26, 08:35
Írta: besirkyjh Dátum 2010 július 26, 08:35
Szia
Nagyon örülök neki hogy sikerült és ilyen egyszerüen és gyorsan.
Csak hogy más is tanuljon belöle : csak a nyáktervet és az instrukciokat kapta tölem és a vezérlöje TB6560AHQ-val van épitve és nagyon minimális elektronikai gyakorlattal rendelkezett .
Ügyes vagy és használd egészséggel [#eljen]
Nagyon örülök neki hogy sikerült és ilyen egyszerüen és gyorsan.
Csak hogy más is tanuljon belöle : csak a nyáktervet és az instrukciokat kapta tölem és a vezérlöje TB6560AHQ-val van épitve és nagyon minimális elektronikai gyakorlattal rendelkezett .
Ügyes vagy és használd egészséggel [#eljen]
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 július 26, 08:37
Írta: besirkyjh Dátum 2010 július 26, 08:37
Szia Feco
Ezekszerint tegnap megoldodott az áramszabályzásod ?
Ezekszerint tegnap megoldodott az áramszabályzásod ?
Cím: Re:Léptetőmotor
Írta: Varga Ferenc Dátum 2010 július 26, 09:08
Írta: Varga Ferenc Dátum 2010 július 26, 09:08
Igen szenyezett volt a nyák.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2010 július 26, 12:49
Írta: besirkyjh Dátum 2010 július 26, 12:49
Most nézem , csak sikerült elirnom mert 297-298-bol van a vezérlöje .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 július 27, 23:51
Írta: 000000000 Dátum 2010 július 27, 23:51
Kedves fórumtársak!
Hozzájutottam, néhány "Step-Syn" 103G770-2261 motorhoz. Ezek 8 kivezetéses bipoláris motorok, de nem ismerem a bekötést. Ha valakinek megvan a bekötése, nagyon megköszönném, ha közölné, akár a fórumon, akár közvetlenül. Fáradozását előre is köszönöm. Mihelyt tudom viszonozom.
Hozzájutottam, néhány "Step-Syn" 103G770-2261 motorhoz. Ezek 8 kivezetéses bipoláris motorok, de nem ismerem a bekötést. Ha valakinek megvan a bekötése, nagyon megköszönném, ha közölné, akár a fórumon, akár közvetlenül. Fáradozását előre is köszönöm. Mihelyt tudom viszonozom.
Cím: Re:Léptetőmotor
Írta: Rinaldo Dátum 2010 július 28, 11:13
Írta: Rinaldo Dátum 2010 július 28, 11:13
Itt egy katalógus.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 július 28, 15:01
Írta: 000000000 Dátum 2010 július 28, 15:01
Köszönöm a katalógust!
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 05, 17:39
Írta: Evodiron Dátum 2010 augusztus 05, 17:39
Sziasztok!
Ha a TurboCNC progiban a léptetési freki pl. 420Hz, és a léptetőmotor 42 step/ford. akkor ez 10ford/sec = 600 1/min, igaz? (kis floppymeghajtó fejpozícionálója)
Ezt a kis nyavajást egy L297-L298-as párossal hajtottam meg 10ohm-os "sense" ellenállással. (ez az a gyári 4 meghajtó részt tartalmazó áramkör, amit a vaterán is lehetett látni 3500Ft-ért)
Lehet tippelni, hogy mennyi volt a max freki amin még elpörgött üresjáratban. [#hehe]
Ha a TurboCNC progiban a léptetési freki pl. 420Hz, és a léptetőmotor 42 step/ford. akkor ez 10ford/sec = 600 1/min, igaz? (kis floppymeghajtó fejpozícionálója)
Ezt a kis nyavajást egy L297-L298-as párossal hajtottam meg 10ohm-os "sense" ellenállással. (ez az a gyári 4 meghajtó részt tartalmazó áramkör, amit a vaterán is lehetett látni 3500Ft-ért)
Lehet tippelni, hogy mennyi volt a max freki amin még elpörgött üresjáratban. [#hehe]
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 05, 17:50
Írta: Evodiron Dátum 2010 augusztus 05, 17:50
Jah és a táp egy HP nyomtatóból van, 41V körüli fesz-szel.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 augusztus 05, 17:58
Írta: s7manbs8 Dátum 2010 augusztus 05, 17:58
2kHz-el megy egy olyan kb. ?
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 05, 18:19
Írta: Evodiron Dátum 2010 augusztus 05, 18:19
Egy picit többel is! [#awink] Még várok pár tippet, aztán elárulom.
Amúgy kinek mennyi volt a max üresjárati fordulatszáma amit lépteccsel elért? (1/min-ben megadva, bármilyen lépteccsel)
Amúgy kinek mennyi volt a max üresjárati fordulatszáma amit lépteccsel elért? (1/min-ben megadva, bármilyen lépteccsel)
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 augusztus 05, 19:33
Írta: jv7pu3a5p Dátum 2010 augusztus 05, 19:33
42lépés/fordulat és kicsi. Ennyi, ezért lehet tekerni mint az őrült.
Erre azért ne alapozz... :)
Erre azért ne alapozz... :)
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2010 augusztus 05, 19:42
Írta: D.Laci Dátum 2010 augusztus 05, 19:42
TurboCnc -fázis vezérléssel ~28000f/min :)
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 05, 19:47
Írta: Evodiron Dátum 2010 augusztus 05, 19:47
Persze, ezzel nem sok mindent lehet csinálni, de legalább teker "ezerrel". :D Ja, meg fél perc alatt felforrósodik. Annyira nem is gyenge, a tengelyt elég nehéz lefogni. Ami a CD-meghajtóban volt, az fele olyan fordulatot tudott csak mint a floppy-s és azt még alacsony fordulaton is lefogtam. (Pedig méretre egyformák, igaz a cd-snek kétszer olyan hosszú az orsólya.)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 augusztus 05, 19:47
Írta: 000000000 Dátum 2010 augusztus 05, 19:47
szia!
lényeg hogy ne legyen lépés tévesztés akár milyen gyorsan is akarod hajtani az elsödleges szempont a lépési megbizhatoság leginkább ere van szükség a cnc meghajtásra aztán lehet kalkulálni a sebbeségel is!
a pwm fekvencia inkább a motor tulajdonságaita van elen konpenzálva az az áram...induktivitás...ohmikus tényezök vanak vele ki konpenzálva hogy minék kisebb legyen a befektetet eletromos energia vesztesége a motorokba!
Ezért más is egy vezérlésnél egy szoftweres pwm vagy egy hadveres !
lényeg hogy ne legyen lépés tévesztés akár milyen gyorsan is akarod hajtani az elsödleges szempont a lépési megbizhatoság leginkább ere van szükség a cnc meghajtásra aztán lehet kalkulálni a sebbeségel is!
a pwm fekvencia inkább a motor tulajdonságaita van elen konpenzálva az az áram...induktivitás...ohmikus tényezök vanak vele ki konpenzálva hogy minék kisebb legyen a befektetet eletromos energia vesztesége a motorokba!
Ezért más is egy vezérlésnél egy szoftweres pwm vagy egy hadveres !
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 05, 19:50
Írta: Evodiron Dátum 2010 augusztus 05, 19:50
Bipoláris moci, step/dir vezérlés. De közel jársz. :D
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2010 augusztus 05, 20:04
Írta: D.Laci Dátum 2010 augusztus 05, 20:04
Ezt én értem el a TC-vel. Unipolárisan...
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 05, 20:10
Írta: Evodiron Dátum 2010 augusztus 05, 20:10
Jah, bocs, azt hittem ez a tipp lett volna. :D Most már látom, hogy amire válaszoltál az az egyéni rekord kérdésem volt.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 05, 20:11
Írta: Evodiron Dátum 2010 augusztus 05, 20:11
Azt mekkora motorral érted el?
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2010 augusztus 05, 20:17
Írta: D.Laci Dátum 2010 augusztus 05, 20:17
Ha jól emlékszem "Robotron SPA 52/60-5682 -5681"
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 augusztus 05, 20:33
Írta: s7manbs8 Dátum 2010 augusztus 05, 20:33
Nem sok az egy kicsit ? Egy nullával ott több van, az f milyen mértékegység ?
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 05, 20:43
Írta: Evodiron Dátum 2010 augusztus 05, 20:43
Az nem annyira kicsi motor. Nem semmi sebesség volt akkor ahhoz a mocihoz. :)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 augusztus 05, 20:44
Írta: s7manbs8 Dátum 2010 augusztus 05, 20:44
Lehet egy szervót is hozzákötött és ha már nem bírta az rásegített. :)
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 05, 20:56
Írta: Evodiron Dátum 2010 augusztus 05, 20:56
Lehet. :D Mondjuk nem írta, hogy hány voltos vezérlővel nyomatta. :D
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 augusztus 05, 22:41
Írta: 000000000 Dátum 2010 augusztus 05, 22:41
Szia!
Légyszives linkeld már be azt a vezérlőt , mert sehol se találom a vaterán.
Köszi
Légyszives linkeld már be azt a vezérlőt , mert sehol se találom a vaterán.
Köszi
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 05, 23:30
Írta: Evodiron Dátum 2010 augusztus 05, 23:30
Szia!
Régebben volt fent, mostanában nem láttam. Missu27-nél volt.
Régebben volt fent, mostanában nem láttam. Missu27-nél volt.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 05, 23:35
Írta: Evodiron Dátum 2010 augusztus 05, 23:35
Egy kis segítség a tippeléshez (majdnem a max sebességgen pörög):
http://www.youtube.com/watch?v=uxJMq05jqsw
elektron: ez alapján tippelj újra. [#circling]
http://www.youtube.com/watch?v=uxJMq05jqsw
elektron: ez alapján tippelj újra. [#circling]
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 augusztus 05, 23:45
Írta: s7manbs8 Dátum 2010 augusztus 05, 23:45
Ezek a kicsi motorok iszonyú sebességgel pörögnek, ilyet picit nem próbáltam sose, majd előveszek már egyet valami floppyból. :)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 augusztus 05, 23:47
Írta: s7manbs8 Dátum 2010 augusztus 05, 23:47
Távcső vezérléshez nem tudtok valami komplett nyáktervvel betöltendő hex file-lal minimum LX200 szabványra panelt valahol ? Léptető motor hajtáshoz + fókuszáláshoz mondjuk.
Cím: Re:Léptetőmotor
Írta: kisinas Dátum 2010 augusztus 06, 09:54
Írta: kisinas Dátum 2010 augusztus 06, 09:54
Szia Krajnyák!
Nekem van egy ilyen fölösleges panelom!
Nekem van egy ilyen fölösleges panelom!
Cím: Re:Léptetőmotor
Írta: Varga Ferenc Dátum 2010 augusztus 06, 10:17
Írta: Varga Ferenc Dátum 2010 augusztus 06, 10:17
Küldj egy telefonszámot.
Van kész panel is.
Van kész panel is.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 augusztus 06, 14:34
Írta: s7manbs8 Dátum 2010 augusztus 06, 14:34
Email-emre írhatsz, köszi. :) Csak nem csillagászkodsz te is ? Én nagyon amatőr módon. :)
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 06, 16:25
Írta: Evodiron Dátum 2010 augusztus 06, 16:25
Elárulom akkor a tegnapi videón látott motor fordulatszámát:
28000Hz, 42step/rot --> 40000RPM (2000Hz-es gyorsítás)[#vigyor]
De néha ment 30eHz-en is, de azt csak ritkán értem el. Amúgy 40eHz-es gyorsítás mellett is sikerült elérnem a 30eHz-et. :) (28eHz-et pedig 80eHz-es gyorsítással is)
28000Hz, 42step/rot --> 40000RPM (2000Hz-es gyorsítás)[#vigyor]
De néha ment 30eHz-en is, de azt csak ritkán értem el. Amúgy 40eHz-es gyorsítás mellett is sikerült elérnem a 30eHz-et. :) (28eHz-et pedig 80eHz-es gyorsítással is)
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 06, 16:26
Írta: Evodiron Dátum 2010 augusztus 06, 16:26
(lehet szebb lett volna, ha eHz helyett kHz-et írok. :) )
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2010 augusztus 06, 16:42
Írta: Motoros Dátum 2010 augusztus 06, 16:42
Nem hinném el ha nem látnám a videót.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 augusztus 06, 16:55
Írta: s7manbs8 Dátum 2010 augusztus 06, 16:55
Azzal már gravírozhatnál is, ha még pici erő is maradna benne. :)
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2010 augusztus 06, 17:12
Írta: Szalai György Dátum 2010 augusztus 06, 17:12
A videó melyik részéből derül ki a 28000Hz, vagy pláne a 40000RPM ?
Csak mert a videón a motorhang maximuma 1100Hz környékén van. Ebből nekem nem áll össze a 40000RPM.
Hogy mekkora sebességgel forog az állórész elektromágneses tere, az itt már nincsen köszönő viszonyban a forgórész fordulatszámával.
Meggyőzne, ha mérnéd valami optikai cuccal, de lehet, hogy magad is meglepődnél.
Csak mert a videón a motorhang maximuma 1100Hz környékén van. Ebből nekem nem áll össze a 40000RPM.
Hogy mekkora sebességgel forog az állórész elektromágneses tere, az itt már nincsen köszönő viszonyban a forgórész fordulatszámával.
Meggyőzne, ha mérnéd valami optikai cuccal, de lehet, hogy magad is meglepődnél.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 06, 18:05
Írta: Evodiron Dátum 2010 augusztus 06, 18:05
28000Hz volt beállítva "fast jog"-ra a TurboCNC-ben, és 2000Hz az accel.-re. A videót figyelmesen nézve kb stimmel is az adat, mivel ~14s alatt érte el a max fordulatot.
Mikrofont odadugtam a motorhoz, és freki-mérő progival néztem közben. 10kHz-en 5000Hz-et, 14kHz-en 3500Hz-et mutatott a frekimérő a legnagyobb amplitúdójú jelre szóval itt már bekavarnak a felharmonikusok (alharmonikusok?).
A 40000RPM úgy jön ki, hogy ha 28kHz a step jel és 42step/fordulatos a motor, akkor 28000/42=666,66 1/s a fordulat ezt 60-nal szorozva --> 40000 1/min (RPM)
Sajnos nincs olyan mérőm, amivel meg tudnám nézni, hogy tényleg annyival forog-e a motor.
Mikrofont odadugtam a motorhoz, és freki-mérő progival néztem közben. 10kHz-en 5000Hz-et, 14kHz-en 3500Hz-et mutatott a frekimérő a legnagyobb amplitúdójú jelre szóval itt már bekavarnak a felharmonikusok (alharmonikusok?).
A 40000RPM úgy jön ki, hogy ha 28kHz a step jel és 42step/fordulatos a motor, akkor 28000/42=666,66 1/s a fordulat ezt 60-nal szorozva --> 40000 1/min (RPM)
Sajnos nincs olyan mérőm, amivel meg tudnám nézni, hogy tényleg annyival forog-e a motor.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 06, 18:14
Írta: Evodiron Dátum 2010 augusztus 06, 18:14
10kHz felett sem akadt meg, amikor úgy rendesen hozzányomtam a körmömet (már látszott az orsón, hogy koptatja a körmöm. :) ). Csak nagyon melegszik, nem erre találták ezt ki. :) (A motor csak így a helyére téve "létezik", mert amikor kiszedtem, akkor össze-vissza lötyögött az orsó. A végében egy golyócska tartja a helyén az orsót.)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 augusztus 06, 18:21
Írta: svejk Dátum 2010 augusztus 06, 18:21
Ezt a 2000Hz-es gyorsítást hogy kell értelmezni?
Le tudod fordítani mm/s2-re, vagy valami emészthetőbb formára?
Végül is ennek a kis motornak a dinamikus mozgás volt a dolga eredetileg is :)
Le tudod fordítani mm/s2-re, vagy valami emészthetőbb formára?
Végül is ennek a kis motornak a dinamikus mozgás volt a dolga eredetileg is :)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 augusztus 06, 18:22
Írta: svejk Dátum 2010 augusztus 06, 18:22
"Hogy mekkora sebességgel forog az állórész elektromágneses tere, az itt már nincsen köszönő viszonyban a forgórész fordulatszámával"
Ha kiesik a szinkronból azonnal leáll és nem tudja felvenni a fordulatot, csak ha lecsökken a forgó mágnese mező frekije arra a részre ahol már jelentős nyomatéka van.
(én régebben ezt a szikronba ugrási pontot vettem a motor legnagyobb megengedett üzemi fordulatának)
Ha kiesik a szinkronból azonnal leáll és nem tudja felvenni a fordulatot, csak ha lecsökken a forgó mágnese mező frekije arra a részre ahol már jelentős nyomatéka van.
(én régebben ezt a szikronba ugrási pontot vettem a motor legnagyobb megengedett üzemi fordulatának)
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 06, 18:56
Írta: Evodiron Dátum 2010 augusztus 06, 18:56
Szerintem úgy van ez a gyorsítás, hogy 2000Hz-et növeli a step frekit 1s alatt. Tehát pl az én esetemben a 28Khz-et 14s alatt érte el 20Hz-es kezdeti sebességről (a 20Hz az majdnem nulla. :) ). Így tulajdonképpen a rámpa meredeksége 2000 1/s2. Ha lenne elmozdulás, akkor át lehetne számolni mm/s2-re, de azt már nem írja ki a progi. (ha valamit rosszul gondolok, akkor javítsatok ki)
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 06, 18:59
Írta: Evodiron Dátum 2010 augusztus 06, 18:59
Ezt én is így gondolom. 30kHz-en már elég gyakran megtörténik ez a kiesés, és azonnal leáll a motor. 28kHz-en csak ritkán volt ilyen.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2010 augusztus 06, 19:04
Írta: Szalai György Dátum 2010 augusztus 06, 19:04
Igen, ha végig gondolom, igazad van.
Jó tudni, hogy ha ritkábban írogatsz is mostanában, azért nem hagysz magunkra minket.
Jó tudni, hogy ha ritkábban írogatsz is mostanában, azért nem hagysz magunkra minket.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2010 augusztus 06, 19:33
Írta: jv7pu3a5p Dátum 2010 augusztus 06, 19:33
Szerintem is lehetséges lehet amit gyuri mond, mert kicsi a tömeg és csak 42 lépéses. Nem kizárt, hogy nem áll le.
Jó lenne egy valós fordulatszám mérés...
Jó lenne egy valós fordulatszám mérés...
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 augusztus 06, 21:55
Írta: s7manbs8 Dátum 2010 augusztus 06, 21:55
Én régebben akkor lepődtem meg,mikor a Mach3 helyett a TurboCNC-vel kipróbáltam ugyanazt a motort vezérlőt, a TurboCNC-vel sokkal tovább ment leakadás nélkül, mivel az pontosabban időzít. A Mach meg ki ki hagyott még füllel is lehetett hallani, igaz az egy kisebb gép volt akkoriban, valami 300 MHz-es P1, vagy 500 Mhz-es max. A gépsebesség nem mindegy neki azért már egy 2GHzes gépnél nincsenek ilyen gondok.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 06, 22:11
Írta: Evodiron Dátum 2010 augusztus 06, 22:11
Én is azért nyomom Turbocnc-vel a P166-os gépről. :D (windows alatt esélytelen még kis progikkal is)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 augusztus 06, 22:25
Írta: s7manbs8 Dátum 2010 augusztus 06, 22:25
Azzal a sok géppel, amit kidobtak már a kukába mennyi cnc-t lehetne már hajtani, tiszta pocséklás. :)
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 07, 13:49
Írta: Evodiron Dátum 2010 augusztus 07, 13:49
Érdekes.... Ha a 19-es lábat nem kötöm sehova az L297-nél, akkor HALF vagy FULL stepp lesz? Adatlap szerint ha a jel high=>half, low=>full.
Én ebből arra gondoltam, hogy ha nincs bekötve, akkor full lesz. A panelomon én úgy láttam, hogy ki van vezetve mind a 4db IC 19-es lába egymással összekötve (a gyári 4 meghajtókörös panel), de sehova nem kapcsolódott a panelen belül és így half steppes volt. Rákötötem egy kapcsolót meg egy ellenállást, amivel lehetett GND-re és 5V-ra kapcsolni és így működik rendesen.
Szóval a kis moci eddig fél lépésben volt hajtva, és úgy 40-42 lépés adódott, de teljes lépésben csak 20-21 lépéses. (a fél lépései nem voltak egyformák, vagy a tekercsei vagy a vezérlés nem tökéletes. Egész lépésben is más hangja van a két tekercsnek állás közben) (ettől még ugyan úgy 40000RPM volt az elméleti fordulatszáma, mivel a fél lépéssel számoltam)
Én ebből arra gondoltam, hogy ha nincs bekötve, akkor full lesz. A panelomon én úgy láttam, hogy ki van vezetve mind a 4db IC 19-es lába egymással összekötve (a gyári 4 meghajtókörös panel), de sehova nem kapcsolódott a panelen belül és így half steppes volt. Rákötötem egy kapcsolót meg egy ellenállást, amivel lehetett GND-re és 5V-ra kapcsolni és így működik rendesen.
Szóval a kis moci eddig fél lépésben volt hajtva, és úgy 40-42 lépés adódott, de teljes lépésben csak 20-21 lépéses. (a fél lépései nem voltak egyformák, vagy a tekercsei vagy a vezérlés nem tökéletes. Egész lépésben is más hangja van a két tekercsnek állás közben) (ettől még ugyan úgy 40000RPM volt az elméleti fordulatszáma, mivel a fél lépéssel számoltam)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 augusztus 07, 14:27
Írta: s7manbs8 Dátum 2010 augusztus 07, 14:27
Lehet felhúzó ellenállás van rajta, és ha nem kötsz rá semmit, akkor pont half step.
Cím: Re:Léptetőmotor
Írta: 69sevc9a5 Dátum 2010 augusztus 08, 21:12
Írta: 69sevc9a5 Dátum 2010 augusztus 08, 21:12
Sziasztok!Van két motorom:SIG POSITEC; Model RDM 51122/50 LNB a tipusa.Van ahol azt írják,hogy szervo,máshol pedig azt,hogy 5-fázisú léptető.Akkor most melyik,és mire tudom használni(10 Kg/db)???Kérlek segítsetek.....köszönöm:Róbert
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2010 augusztus 09, 06:17
Írta: Szalai György Dátum 2010 augusztus 09, 06:17
Nekem ez léptetőnek néz ki. Mutasd meg a kapocslécét, a hátsó zárófedél alatt.
Cím: Re:Léptetőmotor
Írta: 69sevc9a5 Dátum 2010 augusztus 09, 20:28
Írta: 69sevc9a5 Dátum 2010 augusztus 09, 20:28
Akkor szedjem le a hátsó borítást???
11 kivezetése van.
11 kivezetése van.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2010 augusztus 09, 20:51
Írta: Szalai György Dátum 2010 augusztus 09, 20:51
1. oldal alja.
Ezekből egyezik valamelyikkel?
Ezekből egyezik valamelyikkel?
Cím: Re:Léptetőmotor
Írta: 69sevc9a5 Dátum 2010 augusztus 09, 20:56
Írta: 69sevc9a5 Dátum 2010 augusztus 09, 20:56
Igen ,a legnagyobbra hasonlít.Nagy darab(16-os a tengelye,és 10 Kg.Holnap leszedem a hátsó zárófedelet.
Cím: Re:Léptetőmotor
Írta: 69sevc9a5 Dátum 2010 augusztus 09, 20:59
Írta: 69sevc9a5 Dátum 2010 augusztus 09, 20:59
Bocs,csak a képet néztem!!!!! A zárófedél holnap jön le
Cím: Re:Léptetőmotor
Írta: 69sevc9a5 Dátum 2010 augusztus 10, 16:54
Írta: 69sevc9a5 Dátum 2010 augusztus 10, 16:54
Megnéztem,leszedtem a zárófedelet.Az első ábrára hasonlít,körívben vannak a csatlakozók,kábelek bekötve(10db)+1 külön.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2010 augusztus 10, 18:07
Írta: Szalai György Dátum 2010 augusztus 10, 18:07
Akkor már nagyon biztosnak látszik, hogy 5 fázisú léptető motorok.
A kicsi (0,72fok) lépésszögük miatt nagyon alkalmasak lassú fordulatú, nagy nyomaték igényű, pontosan pozícionáló, mégis nyílt hurkú hajtásba. Mert két egyforma van belőle, nagyon jók lennének egy nagy, iker golyósorsókkal hajtott mozgóhidas gép X irányának hajtására.
A kicsi (0,72fok) lépésszögük miatt nagyon alkalmasak lassú fordulatú, nagy nyomaték igényű, pontosan pozícionáló, mégis nyílt hurkú hajtásba. Mert két egyforma van belőle, nagyon jók lennének egy nagy, iker golyósorsókkal hajtott mozgóhidas gép X irányának hajtására.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2010 augusztus 10, 18:10
Írta: Szalai György Dátum 2010 augusztus 10, 18:10
Vagy X-Y asztal mozgatására.
Cím: Re:Léptetőmotor
Írta: 69sevc9a5 Dátum 2010 augusztus 10, 21:32
Írta: 69sevc9a5 Dátum 2010 augusztus 10, 21:32
Köszönöm a felvilágosítást.A "nyílt hurkú"azt jelenti,hogy nincs encoder???
Szeretnék készíteni én is egy cnc-t,de nem akarok 2-3-mat barkácsolni.Egyet szeretnék,de az szuper legyen.Ma jutottam hozzá vagy 5 méter lineáris sinhez+kocsik.25-ös,INA gyártmányú.Igazából szervó halytásúra gondoltam,de ha ezek a motorok is jók,akkor nem adom el,csak vezérlőt kell szereznem hozzá.Igazából azt sem tudom mennyit érnek ezek a motorok.
Szeretnék készíteni én is egy cnc-t,de nem akarok 2-3-mat barkácsolni.Egyet szeretnék,de az szuper legyen.Ma jutottam hozzá vagy 5 méter lineáris sinhez+kocsik.25-ös,INA gyártmányú.Igazából szervó halytásúra gondoltam,de ha ezek a motorok is jók,akkor nem adom el,csak vezérlőt kell szereznem hozzá.Igazából azt sem tudom mennyit érnek ezek a motorok.
Cím: Re:Léptetőmotor
Írta: 43pbwjg8s Dátum 2010 augusztus 10, 23:32
Írta: 43pbwjg8s Dátum 2010 augusztus 10, 23:32
Sziasztok!
Nem tudja véletlenül valaki a hatvani talin is árult SKORPIÓ kisebbik léptecsének az adatait véletlenül?
Nem tudja véletlenül valaki a hatvani talin is árult SKORPIÓ kisebbik léptecsének az adatait véletlenül?
Cím: Re:Léptetőmotor
Írta: 43pbwjg8s Dátum 2010 augusztus 10, 23:41
Írta: 43pbwjg8s Dátum 2010 augusztus 10, 23:41
Cím: Re:Léptetőmotor
Írta: 43pbwjg8s Dátum 2010 augusztus 10, 23:44
Írta: 43pbwjg8s Dátum 2010 augusztus 10, 23:44
Közben megvan az adatlap.
Ha valaki mást is érdekel:
6550 R18 adatlap
Egyébként elhűltem milyen ára van:
Ennyiért vesztegetik
Ha valaki mást is érdekel:
6550 R18 adatlap
Egyébként elhűltem milyen ára van:
Ennyiért vesztegetik
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2010 augusztus 11, 06:30
Írta: Szalai György Dátum 2010 augusztus 11, 06:30
Igen, azt jelenti. Sem encoder, sem más pozíció visszacsatoló eszköz nincsen.
Ezek a motorok is jók, de a meghajtásuk alkatrész igényes, gyári vezérlő ritkán bukkan fel hozzájuk. Jól járnál, ha találnál ott vezérlőket, ahol a motorokat találtad. A DC servo (kefés motor) egyik előnye ezekkel szemben a Hobbyista körökben, az összehasonlíthatatlanul nagyobb elterjedtség. Helyes mechanikai illesztés esetén a dinamikusabb működés, és a jóval egyszerűbben megvalósítható zárt hurkú működés.
Ezeket a motorokat szerintem akkor tartsd meg, ha a vezérlőjük is megvan, és nagy tömegű erős, lomha gépet szeretnél építeni. Ez főleg nagy átmérőjű szerszámok használatát feltételezi, kemény anyagokban. Amihez bivaly erős (öntöttvas) gépváz is szükséges.
„Minden annyit ér, amennyiért megveszik” (© svejk)
Sajnos ezek a motorok vezérlő nélkül csak szélkerék áramfejlesztőnek jók.
Jó vezérlővel, pláne zárt hurkú szabályzóval, aranyat érnek.
Ezek a motorok is jók, de a meghajtásuk alkatrész igényes, gyári vezérlő ritkán bukkan fel hozzájuk. Jól járnál, ha találnál ott vezérlőket, ahol a motorokat találtad. A DC servo (kefés motor) egyik előnye ezekkel szemben a Hobbyista körökben, az összehasonlíthatatlanul nagyobb elterjedtség. Helyes mechanikai illesztés esetén a dinamikusabb működés, és a jóval egyszerűbben megvalósítható zárt hurkú működés.
Ezeket a motorokat szerintem akkor tartsd meg, ha a vezérlőjük is megvan, és nagy tömegű erős, lomha gépet szeretnél építeni. Ez főleg nagy átmérőjű szerszámok használatát feltételezi, kemény anyagokban. Amihez bivaly erős (öntöttvas) gépváz is szükséges.
„Minden annyit ér, amennyiért megveszik” (© svejk)
Sajnos ezek a motorok vezérlő nélkül csak szélkerék áramfejlesztőnek jók.
Jó vezérlővel, pláne zárt hurkú szabályzóval, aranyat érnek.
Cím: Re:Léptetőmotor
Írta: 69sevc9a5 Dátum 2010 augusztus 11, 08:11
Írta: 69sevc9a5 Dátum 2010 augusztus 11, 08:11
Köszönöm a részletes felvilágosítást.Megpróbálok szerezni vezérlőt hozzá(Németország),kevés eséllyel.De a szélkerék áramfelylesztőn elgondolkodom,ha más nem lessz.Vagy eladom.De azért köszönöm.Az egyik fórumtársunk(Farkas Ádám) árul(adok-veszek)AC-servo motorokat vezérlővel...stb 45000Huf-ért.Ezeken gondolkodom,csak nem tudom hogy elég erősek.Vasat is szeretnék marni a géppel(6-8-10-es marókkal)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 augusztus 11, 08:39
Írta: svejk Dátum 2010 augusztus 11, 08:39
Itt láthatsz még egy utolsó darabot, ez 3 db 5 fázisú 10 kivezetéses motort meghajt, igaz úgy emlékszem csak 2,4 A a max áram.
30 ezerért vihető.
30 ezerért vihető.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 augusztus 11, 09:33
Írta: keri Dátum 2010 augusztus 11, 09:33
Hmm, lehet hogy én igényt tartanék rá ennyiért. Motoráram állítható? Step/Dir? Meg bipoláris? Komplett és működik?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 augusztus 11, 11:47
Írta: svejk Dátum 2010 augusztus 11, 11:47
Gondolod rosszat hirdetnék?:(
step-dires, egész/féllépés és áram állítható.
gyári Berger-Lahr.
1kW körüli a trafó benne..
step-dires, egész/féllépés és áram állítható.
gyári Berger-Lahr.
1kW körüli a trafó benne..
Cím: Re:Léptetőmotor
Írta: nmnrsytc Dátum 2010 augusztus 11, 12:19
Írta: nmnrsytc Dátum 2010 augusztus 11, 12:19
Sziasztok !
Nekem is vannak Berger-Lahr 5 fázisú léptető motorok újak ,két kicsi és egy nagy ha valakit érdekel tudok pontos típust küldeni
Nekem is vannak Berger-Lahr 5 fázisú léptető motorok újak ,két kicsi és egy nagy ha valakit érdekel tudok pontos típust küldeni
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 11, 13:40
Írta: Evodiron Dátum 2010 augusztus 11, 13:40
Sziasztok!
Érdekelne, hogy ki milyen leválasztást használ az LPT port védelmére. Valamint, hogy mennyi a max áram amit egy lábról le lehet venni? (én 16mA-t olvastam)
Jelenleg 4N25-ös optocsatoló van nálam 220 ohmos ellenállással. (ez 5V-ra 22mA körül van a dióda árama.)
Érdekelne, hogy ki milyen leválasztást használ az LPT port védelmére. Valamint, hogy mennyi a max áram amit egy lábról le lehet venni? (én 16mA-t olvastam)
Jelenleg 4N25-ös optocsatoló van nálam 220 ohmos ellenállással. (ez 5V-ra 22mA körül van a dióda árama.)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 augusztus 11, 13:49
Írta: svejk Dátum 2010 augusztus 11, 13:49
Alaplapja válogatja, nyelőként kicsit többet tud mint forrásként. Ráadásul a notik általában csak 3.3V-os logikával dolgoznak
Ha step-dirt akarsz akkor a 4N25 felejtős,
Használj H11L1-et, 6N137-et, esetleg 6N136-ot.
A fentiekhez a soros 270-330 Ohm elegendő (ha az opto kimenetén a munkaellenállás 680Ohm-1kOhm közt van), eddig még minden alaplappal és notival jól működött. (elenállás a port kimeneten, opto a gnd felé)
Így minden gondod megszűnik.
Ajánlom még a Profi1-et használóknak is az átalakítást, és el lehet felejteni a Mach-nél az időzítési értékek állítgatását.
Ha step-dirt akarsz akkor a 4N25 felejtős,
Használj H11L1-et, 6N137-et, esetleg 6N136-ot.
A fentiekhez a soros 270-330 Ohm elegendő (ha az opto kimenetén a munkaellenállás 680Ohm-1kOhm közt van), eddig még minden alaplappal és notival jól működött. (elenállás a port kimeneten, opto a gnd felé)
Így minden gondod megszűnik.
Ajánlom még a Profi1-et használóknak is az átalakítást, és el lehet felejteni a Mach-nél az időzítési értékek állítgatását.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 augusztus 11, 13:58
Írta: svejk Dátum 2010 augusztus 11, 13:58
Egyébként a 22mA-od is sántít, mivel_:
(5V tápfesz - a kimenet szaturációs feszültsége - opto LED nyitófeszültség) / 220 Ohm = jó ha meg van a 15 mA
(5V tápfesz - a kimenet szaturációs feszültsége - opto LED nyitófeszültség) / 220 Ohm = jó ha meg van a 15 mA
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 11, 15:14
Írta: Evodiron Dátum 2010 augusztus 11, 15:14
Ja igen, ezt elszámoltam, lemaradt a "-led fesz.". :)
4N25 kapcsolási sebessége adatlap szerint: 3us
Amúgy ezt használtam a múltkor linkelt videón látott 28kHz-el hajtott motornál is. :)
Megnézem ezeket a másik optókat is, köszi!
4N25 kapcsolási sebessége adatlap szerint: 3us
Amúgy ezt használtam a múltkor linkelt videón látott 28kHz-el hajtott motornál is. :)
Megnézem ezeket a másik optókat is, köszi!
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2010 augusztus 11, 16:14
Írta: Szalai György Dátum 2010 augusztus 11, 16:14
Ja biz a!
Meg hogy szabályzóval egybecsinált zárt hurkú, cakk pakk.
A Mavilor DC tárcsákon kényeztetett szememnek, még ennek sem tetszik a fordulatszám/nyomaték görbéje.
Na, ez már szebb.
Meg hogy szabályzóval egybecsinált zárt hurkú, cakk pakk.
A Mavilor DC tárcsákon kényeztetett szememnek, még ennek sem tetszik a fordulatszám/nyomaték görbéje.
Na, ez már szebb.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 11, 18:38
Írta: Evodiron Dátum 2010 augusztus 11, 18:38
Valaki nem tudja véletlenül, hogy a TurboCNC (vagy akár a Mach3) milyen széles (us) high step jelet ad ki? Vagy ha nem az állandó akkor milyen kitöltési tényezőt használnak? Köszi!
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 augusztus 11, 18:51
Írta: s7manbs8 Dátum 2010 augusztus 11, 18:51
Beállítható az értéke.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 augusztus 11, 19:26
Írta: svejk Dátum 2010 augusztus 11, 19:26
Mach3-nál 0-értéket beadva kb. 3 us, aztán ettől nagyobb értéket beadva már pontos.
Sokszor a jelmeredekséggel van a baj nem is a késleltetéssel.
Az általam ajánlottak logikai kimenettel rendelkeznek, direkt digitális átvitelre valók.
Sokszor a jelmeredekséggel van a baj nem is a késleltetéssel.
Az általam ajánlottak logikai kimenettel rendelkeznek, direkt digitális átvitelre valók.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 11, 20:47
Írta: Evodiron Dátum 2010 augusztus 11, 20:47
Most, hogy újra megnéztem a használati útmutatóban... tényleg. :) A PulseWidth a tengely-beállításoknál, ugye? Azt hiszem félreolvastam valamit ott az előbb. Pedig sejtettem, hogy annak kell lennie. Köszi!
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 11, 20:57
Írta: Evodiron Dátum 2010 augusztus 11, 20:57
Igen, azt láttam, hogy ezek nem egyszerű optocsatolók. A példáknál mindnél fordított volt a jel, vagyis a dióda nyitására zárt a tranzisztor. Azokat, hogy kötöd be?
Megnéztem még egy-két "sima" optocsatolót, és olyan 3us-os nyitási idő mellett 25-40us zárás, amit ha durván 40us-nak veszünk akkor is még 25kHz-en tudunk kapcsolni velük (fél lépéses módban 200-as felbontásnál majdnem 4000RPM). Vagy ez a 3us nyitás még sok? (nekem jónak tűnt a 4N25-ös is a teszteléskor)
Megnéztem még egy-két "sima" optocsatolót, és olyan 3us-os nyitási idő mellett 25-40us zárás, amit ha durván 40us-nak veszünk akkor is még 25kHz-en tudunk kapcsolni velük (fél lépéses módban 200-as felbontásnál majdnem 4000RPM). Vagy ez a 3us nyitás még sok? (nekem jónak tűnt a 4N25-ös is a teszteléskor)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 augusztus 11, 21:04
Írta: svejk Dátum 2010 augusztus 11, 21:04
Amiket ajánlottam, a LED nyitásakor L szint lesz a kimeneten.
De egy ilyen optonál szinte mindegy mire állítod a MACH kimenetét - actív L vagy aktív-H mert gyakorlatilag TTL kompatibilis tűimpulzusokat kapsz kisPulse Width-nél ami gyakorlatilag csak jelkésleltetést okoz a vezérlőnek.
(nálam ezekkel az optokkal mindig 0-án van a pulse width és a dir prehange értéke is. Mint írtam 0 értéknél is kb. 3 us-a jelszélesség)
De egy ilyen optonál szinte mindegy mire állítod a MACH kimenetét - actív L vagy aktív-H mert gyakorlatilag TTL kompatibilis tűimpulzusokat kapsz kisPulse Width-nél ami gyakorlatilag csak jelkésleltetést okoz a vezérlőnek.
(nálam ezekkel az optokkal mindig 0-án van a pulse width és a dir prehange értéke is. Mint írtam 0 értéknél is kb. 3 us-a jelszélesség)
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 11, 21:05
Írta: Evodiron Dátum 2010 augusztus 11, 21:05
Jön a következő kérdésem. :)
Ha a H-bridge-nél FET-et teszek akkor annak a védő diódáját használhatnám levezető diódaként? (kiinduló kapcs rajz a L297-es adatlapja szerint, mondjuk csak a felső párt nézve) Fet: IRLZ34N
Nézegetem az LMD18245T meghajtó IC adatlapját és sok érdekességet láttam benne így ránézésre, onnan jött az ötlet.
Ha a H-bridge-nél FET-et teszek akkor annak a védő diódáját használhatnám levezető diódaként? (kiinduló kapcs rajz a L297-es adatlapja szerint, mondjuk csak a felső párt nézve) Fet: IRLZ34N
Nézegetem az LMD18245T meghajtó IC adatlapját és sok érdekességet láttam benne így ránézésre, onnan jött az ötlet.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 11, 21:08
Írta: Evodiron Dátum 2010 augusztus 11, 21:08
Akartam is kérdezni, hogy a Mach-ban lehet-e a bemenetet állítani, mert akkor mindegy. Én jobban szeretem, ha nem invertálva kapom a jeleket. (de ez az én problémám) :)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 augusztus 11, 21:15
Írta: svejk Dátum 2010 augusztus 11, 21:15
Nekem mindegy mit használsz, én csak tapasztalatból beszélek, és csak ajánlást tudok tenni.
Annak idején a Profi1 felhasználók is szívtak a gyenge, analóg átvitelre való optók miatt.
Pl. a 74ls16x nek is meg van adva hogy mennyi a maximális jelmeredekség aminél üzembiztosan működik, a régi motorosok emlékeznek hogy nem volt mindegy milyen gyártótól származott az IC.
Ugyan ez az adat meg van adva úgy emlékszem a L297-nél is...
Persze ha vezérlő Schmitt trigerrel kezdődik más a helyzet, de a kikapcsolási 40us akkor is durva mondjuk 75kHz kernel frekinél.
Arról nem beszélve hogy az átviteli tényező is sokat számít, nem mindegy hogy a H11L1 már 4mA-nél tökéletesen működik, ez a noti 3,3V-os kimeneténél nem elhanyagolható.
Annak idején a Profi1 felhasználók is szívtak a gyenge, analóg átvitelre való optók miatt.
Pl. a 74ls16x nek is meg van adva hogy mennyi a maximális jelmeredekség aminél üzembiztosan működik, a régi motorosok emlékeznek hogy nem volt mindegy milyen gyártótól származott az IC.
Ugyan ez az adat meg van adva úgy emlékszem a L297-nél is...
Persze ha vezérlő Schmitt trigerrel kezdődik más a helyzet, de a kikapcsolási 40us akkor is durva mondjuk 75kHz kernel frekinél.
Arról nem beszélve hogy az átviteli tényező is sokat számít, nem mindegy hogy a H11L1 már 4mA-nél tökéletesen működik, ez a noti 3,3V-os kimeneténél nem elhanyagolható.
Cím: Re:Léptetőmotor
Írta: 69sevc9a5 Dátum 2010 augusztus 11, 21:41
Írta: 69sevc9a5 Dátum 2010 augusztus 11, 21:41
Köszi...nem kínlódok veluk...eladom.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 11, 21:49
Írta: Evodiron Dátum 2010 augusztus 11, 21:49
Persze köszönöm az ajánlást, és lehet, hogy később olyan csatolókat fogok használni, csak most ilyen nincs kéznél és jó lett volna megnyugtatni magamat, hogy amim van, az teljesen jó. :)
Most, hogy mondod ezt az L297-es dolgot, hát nekem nem az az adatlapom volt meg, amin ez rajta van, de most már az is megvan, és még több infó ezzel együtt. :)
Most, hogy mondod ezt az L297-es dolgot, hát nekem nem az az adatlapom volt meg, amin ez rajta van, de most már az is megvan, és még több infó ezzel együtt. :)
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 augusztus 11, 21:56
Írta: keri Dátum 2010 augusztus 11, 21:56
Jaj, tudod hogy nem úgy értettem. Csak mittudomén kell bele trafó, vagy nem step/dir és kell egy illesztő, de mint leírtad ezt mind tudja. Ha fórumtársunk nem tart rá igényt (mivel neki ajánlottad fel) akkor megveszem.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 augusztus 11, 22:00
Írta: keri Dátum 2010 augusztus 11, 22:00
Ja látom is lemondta :)
Mikor jössz Pest közelébe?
Mikor jössz Pest közelébe?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 augusztus 11, 22:52
Írta: svejk Dátum 2010 augusztus 11, 22:52
Mostanában nem hiszem...
szerintem Székesfehérvár a nyerő.
szerintem Székesfehérvár a nyerő.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 augusztus 11, 22:56
Írta: svejk Dátum 2010 augusztus 11, 22:56
Én szoktam...
Arra figyelj hogy a dióda diszipációja hozzáadódik a FET disszipációjához.
Ha van source köri áramfigyelés akkor állítólag nem igazán korrekt megoldás.
Arra figyelj hogy a dióda diszipációja hozzáadódik a FET disszipációjához.
Ha van source köri áramfigyelés akkor állítólag nem igazán korrekt megoldás.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 augusztus 11, 22:56
Írta: svejk Dátum 2010 augusztus 11, 22:56
Mennyit kérsz értük?
Cím: Re:Léptetőmotor
Írta: 69sevc9a5 Dátum 2010 augusztus 12, 08:30
Írta: 69sevc9a5 Dátum 2010 augusztus 12, 08:30
Darabja 15000,de a kettő együtt 25000.De most megyek vidékre és nem leszek netközelben,csak vasárnap.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 14, 10:41
Írta: Evodiron Dátum 2010 augusztus 14, 10:41
Sziasztok!
Meg tudná nekem mondani valaki, hogy az L297-es leírásában található phase chopping és inhibit chopping lehetőségek közül miért lassabb a phase chopping? Valamint a tápegységen keresztül a tekercs energiájának levezetése nem káros a tápegységre?
(phase chopping esetén a H-bridge-hez elég lenne a FET diódáját használni, nem kellene külön dióda)
Meg tudná nekem mondani valaki, hogy az L297-es leírásában található phase chopping és inhibit chopping lehetőségek közül miért lassabb a phase chopping? Valamint a tápegységen keresztül a tekercs energiájának levezetése nem káros a tápegységre?
(phase chopping esetén a H-bridge-hez elég lenne a FET diódáját használni, nem kellene külön dióda)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 augusztus 14, 10:51
Írta: svejk Dátum 2010 augusztus 14, 10:51
Ab ovo - milyen FET-ek lesznek és hogy hajtod meg őket?
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 14, 11:55
Írta: Evodiron Dátum 2010 augusztus 14, 11:55
IRLZ34N, L297 és a megfelelő logikai kapuk hajtanák.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 14, 11:59
Írta: Evodiron Dátum 2010 augusztus 14, 11:59

Az 5-ös helyén lenne a figyelő ellenállás.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 augusztus 14, 13:33
Írta: svejk Dátum 2010 augusztus 14, 13:33
A kérdésem lehet rosszul tettem fel, milyen FET ek lesznek? P+N csatorna, vagy N csatornásak Meghajtó IC-vel?
Ugye az L297 kimenete nem erre lett kitalálva.
Egyébként a FET belső parazita diódáira általában szoktak számolni, főleg a Z sorozatnál melynél -szerintem- ez kimondottan tervezett paraméterű.
Ugye az L297 kimenete nem erre lett kitalálva.
Egyébként a FET belső parazita diódáira általában szoktak számolni, főleg a Z sorozatnál melynél -szerintem- ez kimondottan tervezett paraméterű.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 14, 15:58
Írta: Evodiron Dátum 2010 augusztus 14, 15:58
Írtam az elötte lévő hozzáaszólásban, hogy IRLZ34N FET lenne amit használnék. Az L297-es kimenete menne a logikai kapura arra pedig a fet gate-je csatlakozna. A fet adatlapján az van, hogy "logic-level gate drive", az nem azt jelenti, hogy 5V-ot kap és nyit?
"Egyébként a FET belső parazita diódáira általában szoktak számolni" --> mit szoktak számolni?
Amúgy van olyan kontroller (mint az L297-es) ami tud mikrosteppet? (Amiben nincs meghajtó fokozat, csak a vezérlés)
"Egyébként a FET belső parazita diódáira általában szoktak számolni" --> mit szoktak számolni?
Amúgy van olyan kontroller (mint az L297-es) ami tud mikrosteppet? (Amiben nincs meghajtó fokozat, csak a vezérlés)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 augusztus 14, 16:20
Írta: svejk Dátum 2010 augusztus 14, 16:20
És a felső oldali FET-ek?
Számolnak rá hogy ott van a dióda, tehát nem raknak még pluszba mellé, csak ha nagyon precizek akarnak lenni és ki van hegyezve a disszipáció.
Számolnak rá hogy ott van a dióda, tehát nem raknak még pluszba mellé, csak ha nagyon precizek akarnak lenni és ki van hegyezve a disszipáció.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 14, 17:50
Írta: Evodiron Dátum 2010 augusztus 14, 17:50
ööö felső oldali? Mindegyik FET IRLZ34N lenne. Vagy az nem lehet?
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 14, 18:38
Írta: Evodiron Dátum 2010 augusztus 14, 18:38
Amúgy egy 5-6A-os vezérlőt szeretnék csinálni, 45-50V esetleg 70-90V közöttti fesz.-szel azért kérdezek itt mindenfélét. :)
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 14, 18:38
Írta: Evodiron Dátum 2010 augusztus 14, 18:38
*bipoláris vezérlőt
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 augusztus 14, 18:57
Írta: svejk Dátum 2010 augusztus 14, 18:57
Lehet mindegyik N csatornás...
A felső oldali amelyik drain-je a tápfeszen van, N csatornás (irlz34 is ilyen) esetében.
Mondjuk 50 V a tápfeszed....
Ebben az esetben ha felsőt ki akarod nyitni akkor annak a Gate-jén 65-70 V-nak kell lennie.
Na most ehhez vannak különféle trükkök, de ezt már más fogja neked elmesélni mert én megyek nyaralni :)
A felső oldali amelyik drain-je a tápfeszen van, N csatornás (irlz34 is ilyen) esetében.
Mondjuk 50 V a tápfeszed....
Ebben az esetben ha felsőt ki akarod nyitni akkor annak a Gate-jén 65-70 V-nak kell lennie.
Na most ehhez vannak különféle trükkök, de ezt már más fogja neked elmesélni mert én megyek nyaralni :)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 augusztus 14, 19:00
Írta: svejk Dátum 2010 augusztus 14, 19:00
Mindenesetre én ilyen fesz és áram mellett inkább felső oldalra P csatornást választanék, ott eggyszerűbb a szintillesztés.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 augusztus 14, 19:07
Írta: svejk Dátum 2010 augusztus 14, 19:07
Ja, logic level, akkor elég a gate-n 55-60 V, vagyis tápfesz plusz 5-10 V.
Az megint más kérdés hogy az irlz drain-source max feszültsége eleve csak 55 V.
Az megint más kérdés hogy az irlz drain-source max feszültsége eleve csak 55 V.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 augusztus 14, 19:33
Írta: Evodiron Dátum 2010 augusztus 14, 19:33
Aham, akkor kell FET meghajtó ic is, igaz?
IRLZ34-el csak 45-50V-ig mennék el, ha nagyobb táppal akarnám csinálni, keresnék nagyobb fesz.-ű fet-et.
Köszi a segítséget, jó nyaralást! :)
IRLZ34-el csak 45-50V-ig mennék el, ha nagyobb táppal akarnám csinálni, keresnék nagyobb fesz.-ű fet-et.
Köszi a segítséget, jó nyaralást! :)
Cím: Re:Léptetőmotor
Írta: keri Dátum 2010 augusztus 14, 20:15
Írta: keri Dátum 2010 augusztus 14, 20:15
igen, azt fet meghajtóval érdemes
Cím: Re:Léptetőmotor
Írta: Jozs Dátum 2010 szeptember 02, 09:15
Írta: Jozs Dátum 2010 szeptember 02, 09:15
Sziasztok !
Azt szeretném kérdezni, hogy létezik külön unipoláris és bipoláris léptetőmotor, vagy csak a tekercsek bekötésétől ( és a vezérléstől ) függ, hogy melyik milyen ? Gondolom a 2 tekercses ( 4 kivezetéses ) motorok csak bipolárisan működtethetők, de mi a helyzet pl. a 8 kivezetésesekkel ?
A választól függően még majd lennének kérdéseim :-) Köszi.
Jozs
Azt szeretném kérdezni, hogy létezik külön unipoláris és bipoláris léptetőmotor, vagy csak a tekercsek bekötésétől ( és a vezérléstől ) függ, hogy melyik milyen ? Gondolom a 2 tekercses ( 4 kivezetéses ) motorok csak bipolárisan működtethetők, de mi a helyzet pl. a 8 kivezetésesekkel ?
A választól függően még majd lennének kérdéseim :-) Köszi.
Jozs
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 szeptember 02, 10:51
Írta: svejk Dátum 2010 szeptember 02, 10:51
Igen, a 8 kivezetéses beköthető uni és bipolárisnak is, sőt a párhuzamos soros kapcsolással is lehet játszani.
Pl. ezen PDF 24. oldalán jól láthatóak a bekötési módok
Pl. ezen PDF 24. oldalán jól láthatóak a bekötési módok
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 szeptember 02, 10:54
Írta: 000000000 Dátum 2010 szeptember 02, 10:54
Fontos említeni még, hogy bekötéstöl függöen más lesz a motor áramigénye, és más lesz a jelleggörbéje... Vagy nagyobb sebességre, vagy nagyobb nyomatékra kell...
Cím: Re:Léptetőmotor
Írta: Jozs Dátum 2010 szeptember 02, 12:09
Írta: Jozs Dátum 2010 szeptember 02, 12:09
Értem. Egy helyen azt olvastam, hogy a bipoláris megoldás alkatrészigényesebb ugyan, de magasabb teljesítmény hozható ki a motorokból ( hogy ez sebesség vagy nyomaték többletet jelent-e nemtom ). Gondolom hobby cnc szempontból a bipoláris megoldás előnyösebb, márcsak abból következtetve, hogy a Magi féle vezérlőkből is előbb volt unipoláris ( H1 ), és azt váltotta le a bipoláris ( H2 ). Ha jól értelmezem, akkor a bipoláris H2 -vel mindenféle motort lehet vezérelni, a H1 -gyel viszont csak az osztott tekercsűeket ?
A fázis meghatározás is homályos számomra. Ez tulajdonképpen a tekercs-csoportok számát jelenti ? Köszi.
Jozs
A fázis meghatározás is homályos számomra. Ez tulajdonképpen a tekercs-csoportok számát jelenti ? Köszi.
Jozs
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 szeptember 02, 19:15
Írta: 000000000 Dátum 2010 szeptember 02, 19:15
Sziasztok,
Én is motor és vezérlő vásárláson töröm a fejem.
Amit kinéztem, annak a következők a főbb paraméterei:
1 x 5 Axis TB6560 Driver Controller Board 1/16Microstep 12-36V, 1.5A-3A
5 x 57BYGH76-401A Single-Shaft Stepper Motors 1.89Nm/263oz-in 2.8A
1 x 24V 15A DC power supply
Én is motor és vezérlő vásárláson töröm a fejem.
Amit kinéztem, annak a következők a főbb paraméterei:
1 x 5 Axis TB6560 Driver Controller Board 1/16Microstep 12-36V, 1.5A-3A
5 x 57BYGH76-401A Single-Shaft Stepper Motors 1.89Nm/263oz-in 2.8A
1 x 24V 15A DC power supply
Cím: Re:Léptetőmotor
Írta: gsbwxanch Dátum 2010 szeptember 02, 19:37
Írta: gsbwxanch Dátum 2010 szeptember 02, 19:37
Valaki vett nem is régen ilyen vezérlőt...volt egy kis gonja vele, de megoldották, ha jól tudom. (kínai azt tudni kell)
Olvass vissza.
Olvass vissza.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 szeptember 02, 19:52
Írta: 000000000 Dátum 2010 szeptember 02, 19:52
Tudom, az ebayen láttam.
A vezérlő elég korrektnek látszik, optikailag leválasztott, túlvezérlés és hővédett, 4 csatornás kapcsoló bemenet (végállás, vészleállító, stb) + van kézi vezérlő bemenet is.
A kérdésem végülis a motorokra vonatkoznak.
1,89 Nm nema motorok, de egy fázisú.
Ez jelent valami hátrányt?
A vezérlő elég korrektnek látszik, optikailag leválasztott, túlvezérlés és hővédett, 4 csatornás kapcsoló bemenet (végállás, vészleállító, stb) + van kézi vezérlő bemenet is.
A kérdésem végülis a motorokra vonatkoznak.
1,89 Nm nema motorok, de egy fázisú.
Ez jelent valami hátrányt?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 szeptember 02, 20:06
Írta: 000000000 Dátum 2010 szeptember 02, 20:06
Bocs, most látom, hogy hülyeséget írtam.
Ez egytengelyű (tengelyvégű), szóval így már érthető a számomra is. a kérdés az, hogy van-e valakinek tapasztalata ilyen típusú motorral?
Mennyire megbízható?
Ez egytengelyű (tengelyvégű), szóval így már érthető a számomra is. a kérdés az, hogy van-e valakinek tapasztalata ilyen típusú motorral?
Mennyire megbízható?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 szeptember 02, 20:12
Írta: 000000000 Dátum 2010 szeptember 02, 20:12
Az egész kit 309 $ plusz 126,40 $ szállítás.
Szerintem nem rossz ár a szetért. 5 motor + vezérlő + táp.
Szerintem nem rossz ár a szetért. 5 motor + vezérlő + táp.
Cím: Re:Léptetőmotor
Írta: s55jgf04a Dátum 2010 szeptember 05, 11:18
Írta: s55jgf04a Dátum 2010 szeptember 05, 11:18
Keresek megvételre A3986-os IC-t 3db-ot.Árat privátban.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 szeptember 05, 23:04
Írta: Evodiron Dátum 2010 szeptember 05, 23:04
Csak nem vezérlőt akarsz építeni? :)
Én is akarok csinálni, csak most az iskolakezdés miatt megrekedt a projekt. Te hogy állsz vele? (nekem van ic-m csak még nem tudom, hogy lesz-e eladó és mostanában lehet nem is fogom megtudni...)
Én is akarok csinálni, csak most az iskolakezdés miatt megrekedt a projekt. Te hogy állsz vele? (nekem van ic-m csak még nem tudom, hogy lesz-e eladó és mostanában lehet nem is fogom megtudni...)
Cím: Re:Léptetőmotor
Írta: s55jgf04a Dátum 2010 szeptember 06, 06:28
Írta: s55jgf04a Dátum 2010 szeptember 06, 06:28
De igen, bár nem csak jót hallottam erről az IC-ről, de egyenlőre nem találok jobb(olcsóbb) megoldást, mert 8A-es motorhoz kell.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 szeptember 06, 08:41
Írta: svejk Dátum 2010 szeptember 06, 08:41
Ez az MSD-90-8.2 a a Klavio kft-től biztosan jobb megoldás és azt hiszem a végére olcsóbb is lenne...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 szeptember 06, 08:54
Írta: 000000000 Dátum 2010 szeptember 06, 08:54
Ez a tökéletes megoldás!Soha semmi gond velük![#eljen]
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2010 szeptember 06, 09:31
Írta: Egyújabbgépépítő Dátum 2010 szeptember 06, 09:31
Javaslom olvasd át a #521-től.
A probléma valós, később van megoldási javaslat.
Aki már használta a meghajtót tudja hogy nagyon érzékeny, hamar kijön belőle a füst.
Ha érdekel még van néhány darab.
A probléma valós, később van megoldási javaslat.
Aki már használta a meghajtót tudja hogy nagyon érzékeny, hamar kijön belőle a füst.
Ha érdekel még van néhány darab.
Cím: Re:Léptetőmotor
Írta: s55jgf04a Dátum 2010 szeptember 06, 10:42
Írta: s55jgf04a Dátum 2010 szeptember 06, 10:42
Köszönöm a segítő szándékot, a tanulságokat figyelembe véve remélem sikerül füstölés nélkül is üzemeltetni. Sajnos az MS-90-8.2-hez még gyüjtenem kell.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 szeptember 06, 15:49
Írta: 000000000 Dátum 2010 szeptember 06, 15:49
Kérdéssel fordulok felétek.
Honnan lehet letölteni azoknak a Nema34-es motoroknak a fordulatszám-nyomaték görbéjét, amiket a hobbycnc oldalán árulnak. Nekem konkrétan két 6,4-es és egy 12Nm-es van. Diplomamunkaként egy ilyen portálmarót tervezek, úgyhogy valahogy hozzá kell jutnom ezekhez az adatokhoz.
Segítségeteket előre is köszönöm.
Honnan lehet letölteni azoknak a Nema34-es motoroknak a fordulatszám-nyomaték görbéjét, amiket a hobbycnc oldalán árulnak. Nekem konkrétan két 6,4-es és egy 12Nm-es van. Diplomamunkaként egy ilyen portálmarót tervezek, úgyhogy valahogy hozzá kell jutnom ezekhez az adatokhoz.
Segítségeteket előre is köszönöm.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 szeptember 06, 16:39
Írta: 000000000 Dátum 2010 szeptember 06, 16:39
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 szeptember 06, 17:19
Írta: 000000000 Dátum 2010 szeptember 06, 17:19
Itt nincs meg. Csak a bekötés, meg a motor dimenziói. Nekem olyasmi kell, ahol látni, hogy pl. 100ford/min-nél lejön a 12Nm, 500-nál már csak 8, 1000-nál pedig csak 2. Vagy ilyesmi. Persze egy grafikonon ábrázolva, ahol vízszintes tengelyen fordulatszámokat látok, a függőlegesen pedig nyomatékot.
Előre is köszönöm.
Előre is köszönöm.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 szeptember 06, 18:20
Írta: 000000000 Dátum 2010 szeptember 06, 18:20
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 szeptember 07, 09:24
Írta: 000000000 Dátum 2010 szeptember 07, 09:24
Köszönöm. Pont erre gondoltam. Ezzel nagyon sokat segítettél nekem.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 szeptember 07, 14:41
Írta: Evodiron Dátum 2010 szeptember 07, 14:41
Szia!
Mi lenne az a megoldás? Én elolvastam azt a fórumot pár hete, de nem emléxem, hogy lett volna megoldás, csak valami ötletelés.
Mi lenne az a megoldás? Én elolvastam azt a fórumot pár hete, de nem emléxem, hogy lett volna megoldás, csak valami ötletelés.
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2010 szeptember 07, 17:03
Írta: Egyújabbgépépítő Dátum 2010 szeptember 07, 17:03
Ez csak elvet mutatja.
A konkrét kapcsolást meg kell rajzolni.
A konkrét kapcsolást meg kell rajzolni.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 szeptember 09, 16:50
Írta: Evodiron Dátum 2010 szeptember 09, 16:50
Köszi!
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2010 október 04, 21:55
Írta: juh0557j0 Dátum 2010 október 04, 21:55
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2010 október 05, 08:03
Írta: juh0557j0 Dátum 2010 október 05, 08:03

Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 október 05, 09:54
Írta: svejk Dátum 2010 október 05, 09:54
Nem, de ránézésre 3 fázisú motorhoz való. csak a saját motorjával lehet érték.
Cím: Re:Léptetőmotor
Írta: Révész Richárd Dátum 2010 október 05, 11:42
Írta: Révész Richárd Dátum 2010 október 05, 11:42
Igen.Jó cucc.Ahogy svejk is mondja 3 fázisú motorhoz való.
Cím: Re:Léptetőmotor
Írta: kzoli Dátum 2010 október 05, 20:29
Írta: kzoli Dátum 2010 október 05, 20:29
Egy Epson c42sx nyomtatóból bontottam ezt a két léptetőmocit, de szinte semmit sem sikerült róla kiderítenem. Összeakarok rakni én is egy pici CNC-t, mielőtt belefognék egy nagyobb komolyabba és arra gondoltam, hogy ezeket a motorokat használnám fel hozzá. Szóval jó lenne tudnom a nyomatékot, szögsebességet, feszültséget stb.stb. Tehát mindent ami szükséges. Valaki találkozott már az adatlapjával?

A képet a Képfeltöltés.hu tárolja. http://www.kepfeltoltes.hu

A képet a Képfeltöltés.hu tárolja. http://www.kepfeltoltes.hu
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 október 05, 20:43
Írta: s7manbs8 Dátum 2010 október 05, 20:43
A bezérlő IC-jét nem mentetted ki hozzá a nyomtatóból ? Ezek a pici motorok nyomatékilag talán olyan 0.1-0.2Nm-esek lehetnek.
Cím: Re:Léptetőmotor
Írta: kzoli Dátum 2010 október 05, 21:01
Írta: kzoli Dátum 2010 október 05, 21:01
De, azt is kiszereltem.

A képet a Képfeltöltés.hu tárolja. http://www.kepfeltoltes.hu

A képet a Képfeltöltés.hu tárolja. http://www.kepfeltoltes.hu

A képet a Képfeltöltés.hu tárolja. http://www.kepfeltoltes.hu

A képet a Képfeltöltés.hu tárolja. http://www.kepfeltoltes.hu
Cím: Re:Léptetőmotor
Írta: aajydmb6r Dátum 2010 október 05, 21:07
Írta: aajydmb6r Dátum 2010 október 05, 21:07
Szia!
Figyelem, az alábbi oldal a visszajelzések szerint vírusos !! (modi)
A következő web címen:ezen, ugyanilyen motorokat hajtanak meg a közölt kapcsolási rajz alapján épített vezérlővel. Egyébbként ilyen EM-462,463,464-es motorjaim nekem is vannak. Ha kellenek posta ellenében viheted.
Figyelem, az alábbi oldal a visszajelzések szerint vírusos !! (modi)
A következő web címen:ezen, ugyanilyen motorokat hajtanak meg a közölt kapcsolási rajz alapján épített vezérlővel. Egyébbként ilyen EM-462,463,464-es motorjaim nekem is vannak. Ha kellenek posta ellenében viheted.
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2010 október 05, 21:09
Írta: juh0557j0 Dátum 2010 október 05, 21:09
Lenne hozzá moci is:

Egy komolyabb marógéphez szeretném majd megvenni, ha összejön. 3 fázisú moci valóban, tehát más vezérlővel nem is tudnám használni.
Egy komolyabb marógéphez szeretném majd megvenni, ha összejön. 3 fázisú moci valóban, tehát más vezérlővel nem is tudnám használni.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 október 05, 21:14
Írta: s7manbs8 Dátum 2010 október 05, 21:14
Kicsit vírusos a linkelt oldal !!!
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2010 október 05, 21:33
Írta: juh0557j0 Dátum 2010 október 05, 21:33
Meglehetősen az.
De ugye akinek nincs víruskergetője annak nem tűnik fel. Legfeljebb nem érti miért kínlódik a gépe egy idő után.
De ugye akinek nincs víruskergetője annak nem tűnik fel. Legfeljebb nem érti miért kínlódik a gépe egy idő után.
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2010 október 05, 21:35
Írta: juh0557j0 Dátum 2010 október 05, 21:35
Találtam az Ebayen ilyen vezérlőkártyát. Durva, mert 250 GBP az ára. Akkor ezek szerint megéri a vezérlő + motor együtt a 40 ezret.
Cím: Re:Léptetőmotor
Írta: kzoli Dátum 2010 október 05, 21:39
Írta: kzoli Dátum 2010 október 05, 21:39
Az oldal nálam is vírusos :( A mocik meg lehet, hogy érdekelnek, csak előbb tudjam működésre bírni ezeket.
Cím: Re:Léptetőmotor
Írta: aajydmb6r Dátum 2010 október 05, 22:13
Írta: aajydmb6r Dátum 2010 október 05, 22:13
Valóban nem jelzett a gépem és tényleg lassú mostanában. Ennek utánna is nézek.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 október 15, 21:28
Írta: 000000000 Dátum 2010 október 15, 21:28
Sziasztok.
Remélem valaki tud nekem segíteni. Van 4 stepper motorom, ebből 3 unipoláris. A neten nem nagyon találok róla semmit, vagy lehet, hogy rossz helyen kerestem eddig. A motorokra ezek vannak ráírva:
1. 42SPM24DGYB1; PJJQ182ZB-M; 7.5 deg 140 ohm.
2. EM-286; 04Z01G; STH-39H112-02.
3. EM-278; 17PM-K303-P3L; T0Z07-0-03.
4. 55SPM25D6F1; PJJQ181ZB-M; 7.5 deg 9 ohm.
Előre is köszönöm a segítsget.
Remélem valaki tud nekem segíteni. Van 4 stepper motorom, ebből 3 unipoláris. A neten nem nagyon találok róla semmit, vagy lehet, hogy rossz helyen kerestem eddig. A motorokra ezek vannak ráírva:
1. 42SPM24DGYB1; PJJQ182ZB-M; 7.5 deg 140 ohm.
2. EM-286; 04Z01G; STH-39H112-02.
3. EM-278; 17PM-K303-P3L; T0Z07-0-03.
4. 55SPM25D6F1; PJJQ181ZB-M; 7.5 deg 9 ohm.
Előre is köszönöm a segítsget.
Cím: Re:Léptetőmotor
Írta: xr54ua7n2 Dátum 2010 november 07, 20:42
Írta: xr54ua7n2 Dátum 2010 november 07, 20:42
Üdv!
Kérdésem az lenne, ha egy léptetőmotorra nincs ráírva a nyomatéka, akkor hogyan tudom meg ezt az értéket?
Előre is köszönöm!
Kérdésem az lenne, ha egy léptetőmotorra nincs ráírva a nyomatéka, akkor hogyan tudom meg ezt az értéket?
Előre is köszönöm!
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 november 07, 20:49
Írta: s7manbs8 Dátum 2010 november 07, 20:49
Keress rá a típusára a neten, ha az sincs meg, akkor adjál a tekercsére annyi áramot, hogy a motor kissé langyosan melegedjen, egy perc múlva, majd mérd meg mennyi erő kell az elforgatáshoz egy kézi súlymérő és egy kis erőkar segedelmével.
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2010 november 13, 15:33
Írta: c2nsu773m Dátum 2010 november 13, 15:33
Üdv!
A kérdésem az lenne hogy lehet-e egy léptetőmororból kb 1/4 -del nagyobb teljesítményt kipréselni, itt az erőre gondolok!
Van egy kis léptetőmotoros lézergép ami igen sűrün lépésttéveszt mehanikai okok miatt. Talán ha kicsit erősebb lenne át tudná hidalni ezt a problémát.
De nem szeretnénk kicserélni a motort, a vezérlőn is legfeljebb csak kissebb átalakitás végezhetnénk.
Adjunk neki több áramot, ampert, stb.....?????
Mit tehetünk????
A kérdésem az lenne hogy lehet-e egy léptetőmororból kb 1/4 -del nagyobb teljesítményt kipréselni, itt az erőre gondolok!
Van egy kis léptetőmotoros lézergép ami igen sűrün lépésttéveszt mehanikai okok miatt. Talán ha kicsit erősebb lenne át tudná hidalni ezt a problémát.
De nem szeretnénk kicserélni a motort, a vezérlőn is legfeljebb csak kissebb átalakitás végezhetnénk.
Adjunk neki több áramot, ampert, stb.....?????
Mit tehetünk????
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 november 13, 16:01
Írta: 000000000 Dátum 2010 november 13, 16:01
Igen, az amper növelésével élérhető nagyobb teljesítmény. Mindadig növelheted, amíg káros melegedés nem lessz. Az kb. 60 fok fölött van. De kicsit lehet a melegedés ellen, hűteni is a mocit. De lehetőleg, egyenletesen elosztva a mocin.
Én, ezt tehettem. Te meg azt:))
Én, ezt tehettem. Te meg azt:))
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2010 november 13, 16:04
Írta: Szalai György Dátum 2010 november 13, 16:04
A csúcsáram növelése meghozza a nagyobb fordító nyomatékot. A csúcsáram idejének csökkentésével pedig meg lehet akadályozni a túlmelegedést. Csakhogy a melegedés az áram értékével négyzetesen emelkedik, az idő csökkentésével pedig csak lineárisan csökken. Tehát ha az áramot kicsit emeled, akkor az időt nagyon kell csökkentened, hogy állandó maradjon a melegedés. Kérdés, hogy a motortengelyre ható terhelés, legyőzhető-e a rövid idejű többlet nyomatékkal, vagy a felhasználás folyamatosan igényel többet. Mert ha folyamatosan, akkor ugyan az a motor nem fogja tudni kiszolgálni többletmelegedés nélkül. A többlet meleget le lehet fújni egy ventillátorral. Ha ez eddig nem volt alulméretezett motor, akkor az ¼ áramtöbblet okozta melegedést folyamatosan is el fogja viselni, ennyi tartalék biztosan van benne. Csak nehogy letiltsa a működést valami hőfokvédelem.
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2010 november 13, 16:46
Írta: c2nsu773m Dátum 2010 november 13, 16:46
A motor egyáltalán nem melegszik még!
Nem tudok adatot, a motorka 4x4x4cm.
Sacra mennyi amperral merjem növelni a tápteljesítményt? (Most lehet ez hüly kérdés.)
Nem tudok adatot, a motorka 4x4x4cm.
Sacra mennyi amperral merjem növelni a tápteljesítményt? (Most lehet ez hüly kérdés.)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 november 13, 17:00
Írta: 000000000 Dátum 2010 november 13, 17:00
A táp teljesitményét hiába emeled, inkább a vezérlőn kellene áramot növelned ha van rajta ilyen lehetöség.
Milyen vezérlővel van hajtva a motor?
De ezt kisérletezéssel tudod csak megállapitani, emelsz az áramon aztán használod és nézed mennyire melegszik.
ha nem melegszik akkor adhatsz még neki áramot.
Túlhevülés esetén csökented és viszahülés után tovább teszteled , ha tartja a max 60C fok hömérsékletet akkor az a max áram amit még elvisel.
Milyen vezérlővel van hajtva a motor?
De ezt kisérletezéssel tudod csak megállapitani, emelsz az áramon aztán használod és nézed mennyire melegszik.
ha nem melegszik akkor adhatsz még neki áramot.
Túlhevülés esetén csökented és viszahülés után tovább teszteled , ha tartja a max 60C fok hömérsékletet akkor az a max áram amit még elvisel.
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2010 november 13, 17:02
Írta: c2nsu773m Dátum 2010 november 13, 17:02
Ok! Köszönöm!!!
Cím: Re:Léptetőmotor
Írta: 8f2cbkc9d Dátum 2010 november 13, 19:16
Írta: 8f2cbkc9d Dátum 2010 november 13, 19:16
Sziasztok! Igencsak kezdő vagyok a témában, cnc marót építek Hans Wedemeyer tervei alapján. http://hans-w.com
Elkértem tőle e-mailban a moduláris 4 tengelyes vezérlőt, el is készítettem. Tesztelés folyamatban van, mert csak unipoláris motorjaink vannak, nyomtatókból és azok nem jók (4+1 kivezetés, kipróbáltam az összes kombinációt már). Viszont érezni lehet, hogy próbálná vezérelni szerencsétlent. Az első próbánál szerintem elfüstöltek a diódák, mert tesztelésnél inkább 0-hoz közelít az értékük és kb. 480-nak kéne lennie (UF5408).
Lenne egy kérdésem motorokkal kapcsolatban. A forgatónyomatéknál helyes-e az alábbi számításom?
Ha van egy 1,7Nm-es (=1700Nmm) nyomatékú motorom, akkor egy milliméter hosszú kar esetén 170kg-ot tudnék megmozgatni 1 lépéssel. Ez átszámítható tengelyre is? pl 17mm-es tengely az 8,5mm-es sugarú. Ekkor a nyomaték 1700N/8,5mm=200Nmm lenne? Áttételek lehet alkalmazni? pl. 2:1
Üdv: Dani
Elkértem tőle e-mailban a moduláris 4 tengelyes vezérlőt, el is készítettem. Tesztelés folyamatban van, mert csak unipoláris motorjaink vannak, nyomtatókból és azok nem jók (4+1 kivezetés, kipróbáltam az összes kombinációt már). Viszont érezni lehet, hogy próbálná vezérelni szerencsétlent. Az első próbánál szerintem elfüstöltek a diódák, mert tesztelésnél inkább 0-hoz közelít az értékük és kb. 480-nak kéne lennie (UF5408).
Lenne egy kérdésem motorokkal kapcsolatban. A forgatónyomatéknál helyes-e az alábbi számításom?
Ha van egy 1,7Nm-es (=1700Nmm) nyomatékú motorom, akkor egy milliméter hosszú kar esetén 170kg-ot tudnék megmozgatni 1 lépéssel. Ez átszámítható tengelyre is? pl 17mm-es tengely az 8,5mm-es sugarú. Ekkor a nyomaték 1700N/8,5mm=200Nmm lenne? Áttételek lehet alkalmazni? pl. 2:1
Üdv: Dani
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2010 november 13, 20:06
Írta: Szalai György Dátum 2010 november 13, 20:06
Többnyire lassító áttételeket célszerű alkalmazni, mert csökkenti az egészlépésre jutó lineáris elmozdulást és illeszti a motor forgatónyomatékát a mechanikus terheléshez.
Léptető motorokra a tartó nyomatékot szeretik megadni a gyártók, tehát a számításod fordítva volna igaz. Egy milliméter hosszú vízszintes kar esetén 173,4kg-ot tudnál egyhelyben megtartani. A forgató nyomaték sajnos ettől kisebb.
De hogy mennyivel? Próba.
Léptető motorokra a tartó nyomatékot szeretik megadni a gyártók, tehát a számításod fordítva volna igaz. Egy milliméter hosszú vízszintes kar esetén 173,4kg-ot tudnál egyhelyben megtartani. A forgató nyomaték sajnos ettől kisebb.
De hogy mennyivel? Próba.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 november 13, 20:24
Írta: 000000000 Dátum 2010 november 13, 20:24
Némi kézügyeségel meg lehet oldani hogy az 5 vezetékesből 8-ast csinálj.
Viszont ha elbénázod akkor a motor mehet a kukába.
Nagyon ovatossan lebontva a vezetékek felöli motor fedelét láthatóvá válnak a tekercsek.
Egy nagyon fontos, soha ne szedd ki a forgórészt!
Ha mégis megtörténik akkor a motor nyomatéka kb a felére redukálódik, mert lemágnesezödik a forgórész.
Az egymással szenben álló tekercsek alkotnak egy pár kivezetést és igy lesz 8 vezetékes
Ha megtudtál épiteni egy vezérlőt ez se fog nagy problémát okozni.
Valami nem volt érthető akkor irj nyogottan mail.
Viszont ha elbénázod akkor a motor mehet a kukába.
Nagyon ovatossan lebontva a vezetékek felöli motor fedelét láthatóvá válnak a tekercsek.
Egy nagyon fontos, soha ne szedd ki a forgórészt!
Ha mégis megtörténik akkor a motor nyomatéka kb a felére redukálódik, mert lemágnesezödik a forgórész.
Az egymással szenben álló tekercsek alkotnak egy pár kivezetést és igy lesz 8 vezetékes
Ha megtudtál épiteni egy vezérlőt ez se fog nagy problémát okozni.
Valami nem volt érthető akkor irj nyogottan mail.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 november 13, 20:40
Írta: 000000000 Dátum 2010 november 13, 20:40
Gyuri, szerintem valamit elnéztél. Nincs fordítva semmi. Viszont mindkettőtök következtetése jó, és ugyanaz. Szerintem:))
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2010 november 13, 21:15
Írta: juh0557j0 Dátum 2010 november 13, 21:15
Az 5 vezetékes motor az 5 fázisút jelent?
Ha jól sejtem nem, mert gondolom az 5 fázisút nem lehet átkötözgetéssel bipolárisra kötni.
Ez a "ne szedd ki a forgórészt" dolog számomra nagyon érdekes. Főleg, mert sokan ezt vallják amit írtál. Én 4 motoromat tekercseltem át és napokig kint volt a forgórész, de nem lett semmi baja. Sőt áttekercselés után erősebb is lett ( ez volt a cél). Ekkor még senki nem mondta, hogy nem szabad kiszedni.
Ha jól sejtem nem, mert gondolom az 5 fázisút nem lehet átkötözgetéssel bipolárisra kötni.
Ez a "ne szedd ki a forgórészt" dolog számomra nagyon érdekes. Főleg, mert sokan ezt vallják amit írtál. Én 4 motoromat tekercseltem át és napokig kint volt a forgórész, de nem lett semmi baja. Sőt áttekercselés után erősebb is lett ( ez volt a cél). Ekkor még senki nem mondta, hogy nem szabad kiszedni.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 november 13, 21:21
Írta: svejk Dátum 2010 november 13, 21:21
Mágnese válogatja... a régebbi (10 év) motorok tuti lemágneseződnek.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2010 november 13, 23:24
Írta: Szalai György Dátum 2010 november 13, 23:24
Ő ezt írta: „egy milliméter hosszú kar esetén 170kg-ot tudnék megmozgatni”
Én meg ezt: „Egy milliméter hosszú vízszintes kar esetén 173,4kg-ot tudnál egyhelyben megtartani.”
Az van fordítva, hogy nem megmozgatni, hanem megtartani. Mert a léptető motorra megadott 1,7Nm az általában nem forgató nyomaték, hanem tartó nyomaték. Sajnos.
Így értettem.
Én meg ezt: „Egy milliméter hosszú vízszintes kar esetén 173,4kg-ot tudnál egyhelyben megtartani.”
Az van fordítva, hogy nem megmozgatni, hanem megtartani. Mert a léptető motorra megadott 1,7Nm az általában nem forgató nyomaték, hanem tartó nyomaték. Sajnos.
Így értettem.
Cím: Re:Léptetőmotor
Írta: j99i206if Dátum 2010 november 15, 19:52
Írta: j99i206if Dátum 2010 november 15, 19:52
Van két Gamma gyártmányú motorom (a CNC-kezdemény eredeti motorjai) jók ezek valamire vagy dobáljak vele kutyát?
Tipus ML 5756-200/24V
Feszültség 12V
Áramerősség 0.5A
inercia 140 gcm2
nyomaték 35 Ncm
step angle 1.8
Tipus ML 5756-200/24V
Feszültség 12V
Áramerősség 0.5A
inercia 140 gcm2
nyomaték 35 Ncm
step angle 1.8
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2010 november 17, 18:36
Írta: Szalai György Dátum 2010 november 17, 18:36
Ne bántsd a kutyákat. Őszintébb lények több ismerősömnél. (Talán még okosabbak is.)
Jól jöhet még az a két motor. Van bennük két jó csapágy, hozzájuk való csapágyház és még tengely is. Forgórész mágnes, rézdrót. Lehet kézi kerék jeladónak is használni. Vagy áramfejlesztőnek, LED-el világítós mókuskerékben. Lehet mágnesfék is. Udvari szélsebességmérő, vagy léptető motoros toronyóra. Használhatod egyből alacsony feszültségű, segédfázisú motornak 50Hz-től, segédkondenzátorral.
Több nem jut eszembe, de biztos van még más is.
Jól jöhet még az a két motor. Van bennük két jó csapágy, hozzájuk való csapágyház és még tengely is. Forgórész mágnes, rézdrót. Lehet kézi kerék jeladónak is használni. Vagy áramfejlesztőnek, LED-el világítós mókuskerékben. Lehet mágnesfék is. Udvari szélsebességmérő, vagy léptető motoros toronyóra. Használhatod egyből alacsony feszültségű, segédfázisú motornak 50Hz-től, segédkondenzátorral.
Több nem jut eszembe, de biztos van még más is.
Cím: Re:Léptetőmotor
Írta: j99i206if Dátum 2010 november 18, 23:08
Írta: j99i206if Dátum 2010 november 18, 23:08
Magyarul nézzek valami combosabbat [#vigyor3]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 december 02, 15:20
Írta: 000000000 Dátum 2010 december 02, 15:20
Egy barátomnak van ilyen léptető motorja, a felirat szerint 4-fázisú. Tud valaki vezérlőt hozzá?

Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 december 02, 15:21
Írta: 000000000 Dátum 2010 december 02, 15:21

Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 december 02, 15:21
Írta: 000000000 Dátum 2010 december 02, 15:21

Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2010 december 02, 22:32
Írta: Szalai György Dátum 2010 december 02, 22:32
Szerintem ez egy kutya közönséges léptetőmotor, a megszokott négy tekercsével.
Bátran meghajtanám akár melyik „kétfázisú” léptetőmotor vezérlővel.
Bátran meghajtanám akár melyik „kétfázisú” léptetőmotor vezérlővel.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 december 03, 00:17
Írta: 000000000 Dátum 2010 december 03, 00:17
Egyezik a véleményünk. Nem tudom mennyi vezeték jön ki, de feltételezem 8. Ha igen, akkor bekötném bipollárisnak. Amenyiben nem ad megfelelő eredményt, csak tekercsek felét használnám.
Cím: Re:Léptetőmotor
Írta: fifp6rjch Dátum 2010 december 03, 07:36
Írta: fifp6rjch Dátum 2010 december 03, 07:36
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2010 december 03, 09:20
Írta: Rabb Ferenc Dátum 2010 december 03, 09:20
Feltárult a Titkok Kamrája! Köszi!
Cím: Re:Léptetőmotor
Írta: fifp6rjch Dátum 2010 december 03, 11:00
Írta: fifp6rjch Dátum 2010 december 03, 11:00
Nincs mit, nagyon szívesen!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 december 03, 18:29
Írta: 000000000 Dátum 2010 december 03, 18:29
Szia Gyuri!
Mint álltalában, most is igazad van.Ez egy négy kivezetéses bipoláris léptecs.Meg is pörgettem egy MSD vezérlővel, klasszul megy. Engem megtévesztett a felirat.

Használhatsz, mikrofon csatlakozókat is.
Az ajzatban van retesz is, kiesés ellen.

Remélem most jó.
Mint álltalában, most is igazad van.Ez egy négy kivezetéses bipoláris léptecs.Meg is pörgettem egy MSD vezérlővel, klasszul megy. Engem megtévesztett a felirat.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 december 03, 18:31
Írta: 000000000 Dátum 2010 december 03, 18:31
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 december 06, 09:48
Írta: Evodiron Dátum 2010 december 06, 09:48
Ha esetleg az adok veszekből kitörölnék, inkább ide is beteszem (nem kapok százalékot a termék árából, nem azért "hirdetem" :D)
Szeretnék a figyelmetekbe ajánlani egy mini léptető motor vezérlőt:
http://www.pololu.com/catalog/product/1201
-(1)-2-4-8-16-os mikrolépés
-2A max, 8-35V
-15x20mm-es a panel [#wow1]
-2600-2800Ft (árfolyam függő)
Én az e-bay-en rendeltem, postával 3100Ft volt (1db-ot vettem csak, 9 nap alatt ideért :) ). (Most nem találtam meg e-bayen) Hétvégén volt egy gyors teszt, működött. Mikrolépés is jónak tűnt, de komolyabban nem volt időm letesztelni. :)
Szeretnék a figyelmetekbe ajánlani egy mini léptető motor vezérlőt:
http://www.pololu.com/catalog/product/1201
-(1)-2-4-8-16-os mikrolépés
-2A max, 8-35V
-15x20mm-es a panel [#wow1]
-2600-2800Ft (árfolyam függő)
Én az e-bay-en rendeltem, postával 3100Ft volt (1db-ot vettem csak, 9 nap alatt ideért :) ). (Most nem találtam meg e-bayen) Hétvégén volt egy gyors teszt, működött. Mikrolépés is jónak tűnt, de komolyabban nem volt időm letesztelni. :)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 december 06, 13:47
Írta: s7manbs8 Dátum 2010 december 06, 13:47
Maga az IC meg úgy látom 5 dollár kb. egy ezres, ha csinálsz panelt magadnak hozzá. :)
Cím: Re:Léptetőmotor
Írta: hyn6ys8wt Dátum 2010 december 07, 16:41
Írta: hyn6ys8wt Dátum 2010 december 07, 16:41
Ilyen vezérlőt használ valaki? Van valami tapasztalat vele?
Csak 51dollár szállítással (11000ft)

Csak 51dollár szállítással (11000ft)
Cím: Re:Léptetőmotor
Írta: nmnrsytc Dátum 2010 december 07, 16:47
Írta: nmnrsytc Dátum 2010 december 07, 16:47
Szia !
A vaterán is találsz ilyet 14-16ezer körül.
A vaterán is találsz ilyet 14-16ezer körül.
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 december 07, 16:52
Írta: me3ua0a6 Dátum 2010 december 07, 16:52
Tesztelés alatt van pár darab, hobbycélra megfelelő, de lehetséges, hogy megkövetel némi átalakítást, (alkatrészcserét egy konkrét áramra, vagy pl 3V-os LPT-portra. )
Jópáran érdeklődnek utána nálam is, de nem mernek zsákbamacskát venni :( Emiatt azt tervezem, hogy leírását magyarosítom, illetve szervizelést tudok nyújtani, beüzemelést, beállítást, tesztelést, és csatlakozókat is adnék hozzá.
Pár megrendelésem már van rá, de idő hiányában lassan megy a dolog.
Vaterán is sok ilyent árulnak 15-23-ért, de semmit nem konyítanak hozzá.
Ugyanaz az IC, mint a H2-ben, ha jól tudom.
Jópáran érdeklődnek utána nálam is, de nem mernek zsákbamacskát venni :( Emiatt azt tervezem, hogy leírását magyarosítom, illetve szervizelést tudok nyújtani, beüzemelést, beállítást, tesztelést, és csatlakozókat is adnék hozzá.
Pár megrendelésem már van rá, de idő hiányában lassan megy a dolog.
Vaterán is sok ilyent árulnak 15-23-ért, de semmit nem konyítanak hozzá.
Ugyanaz az IC, mint a H2-ben, ha jól tudom.
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 december 07, 16:53
Írta: me3ua0a6 Dátum 2010 december 07, 16:53
Időhiány = vizsgák kezdete.
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 december 07, 16:55
Írta: me3ua0a6 Dátum 2010 december 07, 16:55
Utóirat:
Kínai alaposság - gagyi kivitelben.
Ezt nem leszólásként mondom, hanem a sok kézzel ráhekkelt alkatrész miatt. Ára miatt viszont érdemes lehet ezzel elindulni.
Kínai alaposság - gagyi kivitelben.
Ezt nem leszólásként mondom, hanem a sok kézzel ráhekkelt alkatrész miatt. Ára miatt viszont érdemes lehet ezzel elindulni.
Cím: Re:Léptetőmotor
Írta: hyn6ys8wt Dátum 2010 december 08, 07:04
Írta: hyn6ys8wt Dátum 2010 december 08, 07:04
Köszönöm a válaszokat, tegnap vettem én is egyet. Sajnos még két hét mire ideér...:-(
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 december 08, 14:26
Írta: 000000000 Dátum 2010 december 08, 14:26
A Klavionál árult MSD vezérlők tökéletesek, soha semmi gondom nem volt velük. Ajánlom mindenkinek!
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 december 08, 16:46
Írta: me3ua0a6 Dátum 2010 december 08, 16:46
Ezt aláírom! Profi vezérlők! De egy tengely árából kijön talán egy 5 tengelyes kínai vezérlő. És egy hobbistának elindulásra ez az ár nagy kincs.
A későbbiekben és profi gépre már én is profi vezérlőt ajánlok!
A későbbiekben és profi gépre már én is profi vezérlőt ajánlok!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 december 08, 17:08
Írta: 000000000 Dátum 2010 december 08, 17:08
de msd van szetben is msd+léptecs lehet azon már meg éri gondolkodni mind épiteni![#vigyor]
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 december 08, 17:45
Írta: me3ua0a6 Dátum 2010 december 08, 17:45
Na de az mennyibe kerülhet? Nem találtam árat rá :(
Szerintem drágább mint 3db 500ft-s léptetőmotor és a 11000ft-s kínai vezérlő :D
Én véleményem, hogy egy hobbysta a léptecset bontja, vagy vate-rázza, és nem 1-2-3Nm-es motort vesz újonnan :D
Izlés dolga.
Szerintem drágább mint 3db 500ft-s léptetőmotor és a 11000ft-s kínai vezérlő :D
Én véleményem, hogy egy hobbysta a léptecset bontja, vagy vate-rázza, és nem 1-2-3Nm-es motort vesz újonnan :D
Izlés dolga.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 december 08, 17:59
Írta: 000000000 Dátum 2010 december 08, 17:59
Azért egy "komolyabb" géphez kell az 1.5Nm-es léptecs.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 december 08, 19:15
Írta: 000000000 Dátum 2010 december 08, 19:15
szerintem ez nem ilyen egyszerü ha egy olyan gépet csinálsz amivel folyamatos probléma van azal nem tudsz még egy kisebb munkát sem meg valositani akor meg mi értelme a gépnek ha csak disznek van mert nem használhato célnak rendeltetés szerüen meg csak selejtet gyárt!
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 december 08, 20:08
Írta: me3ua0a6 Dátum 2010 december 08, 20:08
Fúú, ezt most nem értem miről szól... A lépésvesztésre gondolsz?
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 december 08, 20:21
Írta: me3ua0a6 Dátum 2010 december 08, 20:21
Én álláspontom:
Én inkább hobbystának, és kezdőnek vallom magamat és nem igazi CNC-snek. Nálam ez a határvonal kb a trapézorsó, alu-váz és a lin-csúszkáknál van valahol. Egy nagy menetemelkedésű-acálvázas lin sines/csapágyas gépre természetesen xNm-es motor és profi vezérlő dukál. Ez így ok.
Viszont jelenleg készülő gépemen is DLaci 500ft-s motorjai lesznek. a gép kb 10-20ezer ft-ból kijött, szerinted ez megér egy 60ezer ft-s vezérlőt? :D Na itt én is elvigyorodtam :D
Nálam ez a hobby kategória :)
Én inkább hobbystának, és kezdőnek vallom magamat és nem igazi CNC-snek. Nálam ez a határvonal kb a trapézorsó, alu-váz és a lin-csúszkáknál van valahol. Egy nagy menetemelkedésű-acálvázas lin sines/csapágyas gépre természetesen xNm-es motor és profi vezérlő dukál. Ez így ok.
Viszont jelenleg készülő gépemen is DLaci 500ft-s motorjai lesznek. a gép kb 10-20ezer ft-ból kijött, szerinted ez megér egy 60ezer ft-s vezérlőt? :D Na itt én is elvigyorodtam :D
Nálam ez a hobby kategória :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 december 08, 20:42
Írta: 000000000 Dátum 2010 december 08, 20:42
az msd is hobby kategoria csak jol megvan oldva bene minden rövidzár motor áram pihentetés!
ez sokad dob a mércén nics motor pihentetésnél nagy áram fogyasztás ami höt fejlesztene a motron vés a rövidzár védelem pl ha rossz bekötöt steper nem küldi el más világra a vezérlöt!
bontot motorok jön a sok kérdés hogy kell bekötni és mér füstöl is a olcso vezérlö mert ép nincs bene rövidzár védelem csak áram figyelés ami nem védi meg a vezérlö ict a füstöl!
A profi kategoriára az iparban kezdödik nem 10..100E kategoria hanem sajnos 10..100 millio indulnak!
ez sokad dob a mércén nics motor pihentetésnél nagy áram fogyasztás ami höt fejlesztene a motron vés a rövidzár védelem pl ha rossz bekötöt steper nem küldi el más világra a vezérlöt!
bontot motorok jön a sok kérdés hogy kell bekötni és mér füstöl is a olcso vezérlö mert ép nincs bene rövidzár védelem csak áram figyelés ami nem védi meg a vezérlö ict a füstöl!
A profi kategoriára az iparban kezdödik nem 10..100E kategoria hanem sajnos 10..100 millio indulnak!
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 december 08, 20:56
Írta: me3ua0a6 Dátum 2010 december 08, 20:56
Motor pihentetést minden vezérlő tud manapság. H1, H2 től kezdve, minden cél IC. Rövidzár védelem jó dolog, (de egy méréssel kideríthető :D) Ha az MSD is hobby kategória, akkor nem értem az árát...
Számomra 3 tengelynél nem mindegy, hogy 11ezer ft, vagy 51ezer a vezérlő. Főleg ha tényleg ennyire olcsó lett a mechanika.
Lényeg: számomra egy rövidzárvédelem nem ér meg tengelyenként 10ezer ft-t. (Vezérlő IC 2500ft)
Innentől már ízlés avagy pénztárca dolga a választás.
Számomra 3 tengelynél nem mindegy, hogy 11ezer ft, vagy 51ezer a vezérlő. Főleg ha tényleg ennyire olcsó lett a mechanika.
Lényeg: számomra egy rövidzárvédelem nem ér meg tengelyenként 10ezer ft-t. (Vezérlő IC 2500ft)
Innentől már ízlés avagy pénztárca dolga a választás.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 december 08, 21:23
Írta: 000000000 Dátum 2010 december 08, 21:23
persze kinek a pap kinek a papné!
de ha maximalista vagyok..........[#eplus2]
de ha maximalista vagyok..........[#eplus2]
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 december 08, 22:06
Írta: me3ua0a6 Dátum 2010 december 08, 22:06
Ha az anyagiak nem jelent gondot :P Akkor én is ilyeneket vásárolnék. Nekem anno a H1 is drága volt, így sajátot építettem. Azaz nem 1db volt drága, hanem 3db kellett egyszerre munkatársaknak is.
Cím: Re:Léptetőmotor
Írta: k8v7e533e Dátum 2010 december 09, 02:14
Írta: k8v7e533e Dátum 2010 december 09, 02:14
Sziasztok!
Én egy ilyen, kínai, Vaterás vezértlőt használok és szerintem egyátalán nem rossz! Maga a PCB jó minőségű, az öszeszerelés is elmegy, noha tényleg van rajt pár utólag odatákolt alkatrész és a Hűtőborda ventillátor is olyan kis csavarokkal van "felfogatva", hogy be sem szorul a bordák közé. Működésileg nem vettem észre gondot, Sanyo Dentki 3.9V 1,35A-es motorokkal használom. (Igaz a motorok alapból unipolárisok, így bipolárisként csak a felük van használva. Nembaj, ha eselteg leégetném az egyiket, akkor még ott van a másik fél-fél használható tekercs benne! :) ) Egyébként féllépéses módban terheletlenül a motorok kb 1300RPm sebességgel hajthatók. (a vezérlő tud 1/1, 1/2, 1/4, 1/8 lépéses módot is). EStop, végálláskapcsolók egyszerűen földre húzhatók, teljes optikai leválasztás van benne. IC-t még nem öltem meg egyet sem, az eddigi kb 100 óra használat alatt. Egyedül amit kifogásolni lehet az az, hogy a bekapcsolt motorok eléggé sípolnak (hiába próbáltam akárhány kHz-en járatni, nincs különbség -- vagy csak én nem jöttem rá a megoldásra. Szó-mi-szó én kezdőknek bátran ajánlom, megbízható, egyszerű elemekből felépített vezérlő, és azt se feledjük, hogy végülis a tudása a Toshiba TB6560-as IC-nek köszönhető!
Én egy ilyen, kínai, Vaterás vezértlőt használok és szerintem egyátalán nem rossz! Maga a PCB jó minőségű, az öszeszerelés is elmegy, noha tényleg van rajt pár utólag odatákolt alkatrész és a Hűtőborda ventillátor is olyan kis csavarokkal van "felfogatva", hogy be sem szorul a bordák közé. Működésileg nem vettem észre gondot, Sanyo Dentki 3.9V 1,35A-es motorokkal használom. (Igaz a motorok alapból unipolárisok, így bipolárisként csak a felük van használva. Nembaj, ha eselteg leégetném az egyiket, akkor még ott van a másik fél-fél használható tekercs benne! :) ) Egyébként féllépéses módban terheletlenül a motorok kb 1300RPm sebességgel hajthatók. (a vezérlő tud 1/1, 1/2, 1/4, 1/8 lépéses módot is). EStop, végálláskapcsolók egyszerűen földre húzhatók, teljes optikai leválasztás van benne. IC-t még nem öltem meg egyet sem, az eddigi kb 100 óra használat alatt. Egyedül amit kifogásolni lehet az az, hogy a bekapcsolt motorok eléggé sípolnak (hiába próbáltam akárhány kHz-en járatni, nincs különbség -- vagy csak én nem jöttem rá a megoldásra. Szó-mi-szó én kezdőknek bátran ajánlom, megbízható, egyszerű elemekből felépített vezérlő, és azt se feledjük, hogy végülis a tudása a Toshiba TB6560-as IC-nek köszönhető!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 december 09, 09:41
Írta: 000000000 Dátum 2010 december 09, 09:41
Ami olcsóbb, az nem annyira kifogástalan.
Nincs ebben semmi csoda.
Viszont, mi nem hibázunk!
Igaz, nem is gyártunk semmit, de "nagyon tudjuk", hogy hogyan kellene. [#nevetes1][#nevetes1][#nevetes1]
Ugyan ez volt pl. a LADA-val.
Nem olyan puccos, mint Jaguár.
De, szerintem az ára sem Jaguar!
Mi, már nem változunk!
Nincs ebben semmi csoda.
Viszont, mi nem hibázunk!
Igaz, nem is gyártunk semmit, de "nagyon tudjuk", hogy hogyan kellene. [#nevetes1][#nevetes1][#nevetes1]
Ugyan ez volt pl. a LADA-val.
Nem olyan puccos, mint Jaguár.
De, szerintem az ára sem Jaguar!
Mi, már nem változunk!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 december 09, 11:48
Írta: 000000000 Dátum 2010 december 09, 11:48
"Ha az anyagiak nem jelent gondot " hát az nem mondanám sajnos ezért lesz a gépem 2év amire készen lesz az anyagi hiányok miat ez az év a vezérlö lett 2011 meg a mechanika ez van![#shakehead]
Cím: Re:Léptetőmotor
Írta: m8j2y7u9n Dátum 2010 december 10, 14:09
Írta: m8j2y7u9n Dátum 2010 december 10, 14:09
Üdv.
Most kezdtem el építeni illetve összeszedni az első gépemhez az alkatrészeket. Én is az amp által felvetett vezérlőt gondoltam megvenni. Annyi különbséggel, hogy én komplett szettet gondoltam venni az ebay-en. Ezzel kapcsolatban szeretném kérni a véleményeteket, hogy érdemes-e megvenni. Ilyesmi szettre gondoltam.
Most kezdtem el építeni illetve összeszedni az első gépemhez az alkatrészeket. Én is az amp által felvetett vezérlőt gondoltam megvenni. Annyi különbséggel, hogy én komplett szettet gondoltam venni az ebay-en. Ezzel kapcsolatban szeretném kérni a véleményeteket, hogy érdemes-e megvenni. Ilyesmi szettre gondoltam.
Cím: Re:Léptetőmotor
Írta: f35ezvjs Dátum 2010 december 10, 16:56
Írta: f35ezvjs Dátum 2010 december 10, 16:56
Szia!
Nem akarok ünneprontó lenni de én azt javasolnám vegyél 3 vezérlő kártyát /MSD/ ez 3db külön van ennek azért megvannak az előnyei. bármikor bővítheted 4 -5 tengellyre itt kapsz motorokat is.
Ha az általad megvásárolni kívát 4 az egyben egy tengelye bedöglik lehet eldobhatod az egészet. sokkal könnyebb egy vezérlő kártyát kicserélni. Egyszerű a vásárlás elmész 4 ker Kis Ernő utcába a klavióhoz és ott segítenek neked választani megfelelő motorokat és vezérlőkártyát. Ha véletlen meg valami gondod lenne ott szakemberek azért segítenek.
ez csak az én véleményem
Nem akarok ünneprontó lenni de én azt javasolnám vegyél 3 vezérlő kártyát /MSD/ ez 3db külön van ennek azért megvannak az előnyei. bármikor bővítheted 4 -5 tengellyre itt kapsz motorokat is.
Ha az általad megvásárolni kívát 4 az egyben egy tengelye bedöglik lehet eldobhatod az egészet. sokkal könnyebb egy vezérlő kártyát kicserélni. Egyszerű a vásárlás elmész 4 ker Kis Ernő utcába a klavióhoz és ott segítenek neked választani megfelelő motorokat és vezérlőkártyát. Ha véletlen meg valami gondod lenne ott szakemberek azért segítenek.
ez csak az én véleményem
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 december 10, 19:10
Írta: me3ua0a6 Dátum 2010 december 10, 19:10
Üdv!
90ezer ft-s vásárlás esetén már lehet hogy vám is megy rá...
Ha elszáll az egyik IC, akkor lehet cserélni, ~2500ft. De olcsóbban kijössz, ha a kellékeket vaterán, fórumról, stb vásárolgatod össze
90ezer ft-s vásárlás esetén már lehet hogy vám is megy rá...
Ha elszáll az egyik IC, akkor lehet cserélni, ~2500ft. De olcsóbban kijössz, ha a kellékeket vaterán, fórumról, stb vásárolgatod össze
Cím: Re:Léptetőmotor
Írta: 48s05mtgb Dátum 2010 december 10, 19:14
Írta: 48s05mtgb Dátum 2010 december 10, 19:14
Üdv Mindenkinek!
Előre szólok nagyon kezdő vagyok kérdésem a következő: Van nekem 3db shinano kenshi STH-55D212-es tipusú léptecsem az van ráirvan hogy 11.2V 0.44A. Miért van az hogy nem tudom felpörgetni vagy ha már pörög akkor ránézek és megáll olyan gyenge???
KÖNYÖRGÖM Ne röhögjetek nagyot :D
Előre szólok nagyon kezdő vagyok kérdésem a következő: Van nekem 3db shinano kenshi STH-55D212-es tipusú léptecsem az van ráirvan hogy 11.2V 0.44A. Miért van az hogy nem tudom felpörgetni vagy ha már pörög akkor ránézek és megáll olyan gyenge???
KÖNYÖRGÖM Ne röhögjetek nagyot :D
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 december 10, 19:16
Írta: me3ua0a6 Dátum 2010 december 10, 19:16
Mivel pörgeted, milyen vezérlő, mekkora a tápfesz, egységugrás vagy gyorsulás?
Ne könyörögj, hanem informálj minket :D
Ne könyörögj, hanem informálj minket :D
Cím: Re:Léptetőmotor
Írta: 48s05mtgb Dátum 2010 december 10, 19:17
Írta: 48s05mtgb Dátum 2010 december 10, 19:17
Még valami 8 vezetékes 4 tekercses a moci. bipoláris vezérlőm van. de az nem lehet gond (legalábbis szerintem)mert az előző motorok is lassan foltak hajlandoak normálisan múkodni, pedig azok rendes bipoláris motorok voltak. A vezérlőben L297-298-as IC pár van. Please Help!!!!
Cím: Re:Léptetőmotor
Írta: 48s05mtgb Dátum 2010 december 10, 19:28
Írta: 48s05mtgb Dátum 2010 december 10, 19:28
Tápfesz:12V szerintem ugrik mert csak sipol és nem forog
Cím: Re:Léptetőmotor
Írta: 48s05mtgb Dátum 2010 december 10, 19:36
Írta: 48s05mtgb Dátum 2010 december 10, 19:36
Sajnos a msd vezérlőt nem engedhetem meg magamnak tengelyenként 10e Ft-ért :(
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 december 10, 19:40
Írta: me3ua0a6 Dátum 2010 december 10, 19:40
"Szerintem ugrik..." XD Mivel adod neki a jelet?
Motortuning lényege a tápfeszültség növelése. (H1-H2 leírásánál ez is jól el van magyarázva, érdemes elolvasgatni.)
Motortuning lényege a tápfeszültség növelése. (H1-H2 leírásánál ez is jól el van magyarázva, érdemes elolvasgatni.)
Cím: Re:Léptetőmotor
Írta: 48s05mtgb Dátum 2010 december 10, 20:21
Írta: 48s05mtgb Dátum 2010 december 10, 20:21
Mach3. Elolvastam a leírásban a tuning lényegét értem is csak azt nem vágom hogy mi lesz a lépteccsel ha mondjuk 24V-ot kap merthogy ügyebár 11V-os.
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 december 10, 20:35
Írta: me3ua0a6 Dátum 2010 december 10, 20:35
Semmi különös. Az áram a lényeg. De ezek szerint nem volt teljesen tiszta a tuning leírás? Vagy lehet, hogy nekem túl egyértelmű már ez, így bocsánat!
A lényeg, hogy a vezérlő áramgenerátorosan hajtja meg a motort. Így a rákapcsolt feszültség csak mint erőtartalék jelentkezik, amit pedig csak nagy fordulat esetén használ ki, tehát a motort nem károsítja a nagyobb feszültség. Mach3 képes gyorsításokkal mozgatni a motort, érdemes ebbe is elmélyedni :)
Ha ezek után sem megy, akkor vagy a motor a hibás, vagy a vezérlő :(
(Ui: Létezik 90V-os vezérlő is.)
A lényeg, hogy a vezérlő áramgenerátorosan hajtja meg a motort. Így a rákapcsolt feszültség csak mint erőtartalék jelentkezik, amit pedig csak nagy fordulat esetén használ ki, tehát a motort nem károsítja a nagyobb feszültség. Mach3 képes gyorsításokkal mozgatni a motort, érdemes ebbe is elmélyedni :)
Ha ezek után sem megy, akkor vagy a motor a hibás, vagy a vezérlő :(
(Ui: Létezik 90V-os vezérlő is.)
Cím: Re:Léptetőmotor
Írta: may47wb Dátum 2010 december 10, 20:35
Írta: may47wb Dátum 2010 december 10, 20:35
A 24V-nak örül. Probáld kisebb sebességgel pörgetni a motort.
Cím: Re:Léptetőmotor
Írta: rbbhbyvfs Dátum 2010 december 10, 21:45
Írta: rbbhbyvfs Dátum 2010 december 10, 21:45
Szerintem ez a motor nem lesz egy fürge rosszvas, próbáld párhuzamosan kötni 2-2 tekercsét, így egy picit jobb értékeket érhetsz el, de eleve a 11V feszből 50-60V tunig fesz adódik (minimum), amit viszont nehéz átlagos vezérlővel elérni. Talán ezért nem tudod ugy meghajtani. Egyéként milyen fordulatot vársz a léptetőmotortól?
Cím: Re:Léptetőmotor
Írta: 48s05mtgb Dátum 2010 december 15, 13:08
Írta: 48s05mtgb Dátum 2010 december 15, 13:08
Sziasztok!
Tegnap csináltam egy tápot 25v váltóáram > Graetz híd (25A 400V) > 1000uF 100V elko = kaptam durván 35v feszültséget ami olyan faszán hazavágta 2db léptecs vezérlőmet (pontosabban az L297-es ic elfüstölt.) mint állat. Sajnos még nem épitettem fűst utántőltő gépet igy nem tudom visszatölteni bele ami elszált belőle.
Van valakinek valami ötlete mit b...tam el?
Tegnap csináltam egy tápot 25v váltóáram > Graetz híd (25A 400V) > 1000uF 100V elko = kaptam durván 35v feszültséget ami olyan faszán hazavágta 2db léptecs vezérlőmet (pontosabban az L297-es ic elfüstölt.) mint állat. Sajnos még nem épitettem fűst utántőltő gépet igy nem tudom visszatölteni bele ami elszált belőle.
Van valakinek valami ötlete mit b...tam el?
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2010 december 15, 13:33
Írta: D.Laci Dátum 2010 december 15, 13:33
Valszeg a L297-es nem szereti a 35V-tot.
Nézd átt a kapcsrajzot, és a nyákot, valamit összekötötél amit nem kel.
Nézd átt a kapcsrajzot, és a nyákot, valamit összekötötél amit nem kel.
Cím: Re:Léptetőmotor
Írta: 48s05mtgb Dátum 2010 december 15, 13:37
Írta: 48s05mtgb Dátum 2010 december 15, 13:37
Az L297 a 12V-ot sem szereti és eddig azzal ment rendesen a vezérlő kölün van 5V vezérlő táp meg a motortáp és én a motortápra kötöttem a 35V-ot amugy a 3 vezérlőből "csak" 2 füstölt el.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 december 15, 13:42
Írta: 000000000 Dátum 2010 december 15, 13:42
l297 gondolom 7805 tápolod ez 35v kikapcsol igy nem tudom az l298 hogy viselte a l297 hiányát lehet ez volt a füst oka valoszinü!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 december 15, 14:00
Írta: 000000000 Dátum 2010 december 15, 14:00
Cím: Re:Léptetőmotor
Írta: 48s05mtgb Dátum 2010 december 15, 17:03
Írta: 48s05mtgb Dátum 2010 december 15, 17:03
kicsit hülyén irtam bocsi érte. Az l297-98-as ic párost használom viszont a kapcsolásom olyan hogy nincs benne 7805 ugyanis az l297 és a l298 is külső tápról kap stabil 5voltot. De amugy nagyon köszönöm a segitséget. nagyon át kll néznem ott mindent ugyanis a 3db vezérlőből csak 2 füstölt és mind a 3 ugyanugy volt bekötve(gyanus hogy itt valami nagyon hibázik) :S
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 december 15, 17:47
Írta: 000000000 Dátum 2010 december 15, 17:47
valoszinü hogy az elsö kettö vezérlö zárlatosodot alkatrészei meg védték a harmadik vezérlödet a tulfesztöl igy a biztositékok gyorsabb volt tápegységben hogy a harmadik vezérlö károsodjon vagy tönkremenjen teljesen!
Cím: Re:Léptetőmotor
Írta: fifp6rjch Dátum 2010 december 15, 18:16
Írta: fifp6rjch Dátum 2010 december 15, 18:16
mambablack2009!
Próbálj már meg helyesen írni, csak egy picit odafigyelve a magyar nyelvre!
A mondatot nagybetűvel kezdjük, ott a billentyűzeten hozzá a gomb (Shift vagy akár Caps Lock).
A mondatokat tagoljuk, szépen vesszővel (vagy egyéb írásjelekkel, ha arra szükség van) elválasztva.
Mert speciel ez a hsz.-ed olyan értelmetlen, hogy még Grétsy Lászlónak is beletörne a bicskája.
Tápolni meg legfeljebb a játékokban szoktak, ami értelmetlen, céltalan időhúzást jelent.
Köszi!
Próbálj már meg helyesen írni, csak egy picit odafigyelve a magyar nyelvre!
A mondatot nagybetűvel kezdjük, ott a billentyűzeten hozzá a gomb (Shift vagy akár Caps Lock).
A mondatokat tagoljuk, szépen vesszővel (vagy egyéb írásjelekkel, ha arra szükség van) elválasztva.
Mert speciel ez a hsz.-ed olyan értelmetlen, hogy még Grétsy Lászlónak is beletörne a bicskája.
Tápolni meg legfeljebb a játékokban szoktak, ami értelmetlen, céltalan időhúzást jelent.
Köszi!
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 december 15, 18:44
Írta: svejk Dátum 2010 december 15, 18:44
Neki meg van engedve, már többször kitárgyaltuk...hazánkba szakadt idegenfi :))
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2010 december 15, 18:46
Írta: Szalai György Dátum 2010 december 15, 18:46
Hát… Ha programot is ennyi hibával ír, mint hozzászólást, akkor össze kell szednie szegény vezérlőnek minden tudását, hogy megértse. Nem véletlenül van szükség az egyre intelligensebb vezérlőkre, mert a való világtól elrugaszkodott programozók kutya***rul írnak.
Cím: Re:Léptetőmotor
Írta: 4um5b65d Dátum 2010 december 15, 18:52
Írta: 4um5b65d Dátum 2010 december 15, 18:52
Svejk csak "aztatat" akarta írni, hogy fekete-mamba fórumtárs NEM MAGYAR anyanyelvű !
Cím: Re:Léptetőmotor
Írta: fifp6rjch Dátum 2010 december 15, 19:41
Írta: fifp6rjch Dátum 2010 december 15, 19:41
A neve alapján magyar, de még ha kis hazánktól távol született és élt is, akkor is illik nagybetűvel kezdeni a mondatot, és néha vesszőt használni. Ez más nyelvekben is így van.
Nem a mondatszerkezetét kifogásoltam, bár azt is lehetne, hiszen így egy egyszerű fordítóprogram is tud fordítani.
Csak megérteni nehéz. :)
Nem a mondatszerkezetét kifogásoltam, bár azt is lehetne, hiszen így egy egyszerű fordítóprogram is tud fordítani.
Csak megérteni nehéz. :)
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2010 december 15, 19:45
Írta: Szalai György Dátum 2010 december 15, 19:45
ésezért ismeretlen számáraanagybetű az ékezetaz írásjelek, denéha Mégaszóközhasz nálata is?
Köszi neki, hogy nem függőleges sorokban ír khipu csomókat rajzolva mint az Inkák, vagy Hànzì szimbólumokat ráadásul Ping tájszólásban.
Köszi neki, hogy nem függőleges sorokban ír khipu csomókat rajzolva mint az Inkák, vagy Hànzì szimbólumokat ráadásul Ping tájszólásban.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 december 15, 20:16
Írta: 000000000 Dátum 2010 december 15, 20:16
"neve alapján magyar" biztos vagy.....[#rolleyes]
Cím: Re:Léptetőmotor
Írta: fifp6rjch Dátum 2010 december 15, 20:33
Írta: fifp6rjch Dátum 2010 december 15, 20:33
100%-ig!
Az R. József-ből az R bármi lehetne, de a József, a 100%-ig magyar név, ha ebben a formában, és ezekkel a betűkkel van írva. Bár az "ó" betű a magyaron kívül az armoéz, izlandi, kasubi, lengyel, cseh, szlovák, szorb, katalán, ír, okcitán, portugál és spanyol nyelvekben is megtalálható, viszont ők a József nevet nem így írják.
A legközelebbi hasonló írás erre a névre a lengyel, de ott is csak Józef.
Tehát a József az magyar név. Ha nem ez az igazi neved, akkor ezt nem kell kell magyarra fordítani, megfelel az eredeti is. :)
Az R. József-ből az R bármi lehetne, de a József, a 100%-ig magyar név, ha ebben a formában, és ezekkel a betűkkel van írva. Bár az "ó" betű a magyaron kívül az armoéz, izlandi, kasubi, lengyel, cseh, szlovák, szorb, katalán, ír, okcitán, portugál és spanyol nyelvekben is megtalálható, viszont ők a József nevet nem így írják.
A legközelebbi hasonló írás erre a névre a lengyel, de ott is csak Józef.
Tehát a József az magyar név. Ha nem ez az igazi neved, akkor ezt nem kell kell magyarra fordítani, megfelel az eredeti is. :)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2010 december 15, 20:37
Írta: svejk Dátum 2010 december 15, 20:37
Jól van, mindenki elmondta a véleményét, ne adjatok munkát a moderátoroknak !
Cím: Re:Léptetőmotor
Írta: fifp6rjch Dátum 2010 december 15, 20:41
Írta: fifp6rjch Dátum 2010 december 15, 20:41
Rendben, én egyébként sem akartam ettől sokkal többet hozzáfűzni, meg offolni sem, de nem bírtam szó nélkül hagyni. [#eljen]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2010 december 15, 20:51
Írta: 000000000 Dátum 2010 december 15, 20:51
kb 20éve dolgozok rajta hogy anak látszodjon...... [#smile]
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 december 22, 21:12
Írta: Evodiron Dátum 2010 december 22, 21:12
Ma egy kicsit méregettem mikrolépés pontosságot lézerrel. http://www.youtube.com/watch?v=zDehNYwP9j8
Vexta léptető motor (0,9°/step, 6 kivezetés) meghajtása A4983-as IC alapú vezérlővel (1,2A, soros-bipoláris). 1/8-os mikrolépés. A papír 1mm-es rácsozású. A motor tengelyén egy tükör tükrözi a lézervonalat a papírra. A kattogás a billentyűzet ütögetésekor keletkezett. :)
A többi lépésosztás videóját is feltöltöttem. A vezérlő a mini bipoláris A4983-as alapú, amit nemrég a figyelmetekbe ajánlottam. Látható, hogy nem egyenletesek a lépések, és a lépésosztásnak megfelelő értéknél van kiugrás (pl. itt az 1/8-os osztásúnál minden 8. lépés kiugróan nagy értékű.)
Vexta léptető motor (0,9°/step, 6 kivezetés) meghajtása A4983-as IC alapú vezérlővel (1,2A, soros-bipoláris). 1/8-os mikrolépés. A papír 1mm-es rácsozású. A motor tengelyén egy tükör tükrözi a lézervonalat a papírra. A kattogás a billentyűzet ütögetésekor keletkezett. :)
A többi lépésosztás videóját is feltöltöttem. A vezérlő a mini bipoláris A4983-as alapú, amit nemrég a figyelmetekbe ajánlottam. Látható, hogy nem egyenletesek a lépések, és a lépésosztásnak megfelelő értéknél van kiugrás (pl. itt az 1/8-os osztásúnál minden 8. lépés kiugróan nagy értékű.)
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 december 22, 21:28
Írta: me3ua0a6 Dátum 2010 december 22, 21:28
Egyik Allegró IC sem pontos mikrolépésben :(
Hacsak nem hajtod túl a motort! Ekkor beáll a megfelelő szögbe elég szépen.
Az a bizonyos nagy ugrás az a 4. és 5. lépés között van, amikor két egész lépés közötti felező szöget metszed. (1.8fokos motor esetén 0.9, vagy te esetedben a 0.45fokot)
Én ezt 10méteres távolsággal mértem. XD
Hacsak nem hajtod túl a motort! Ekkor beáll a megfelelő szögbe elég szépen.
Az a bizonyos nagy ugrás az a 4. és 5. lépés között van, amikor két egész lépés közötti felező szöget metszed. (1.8fokos motor esetén 0.9, vagy te esetedben a 0.45fokot)
Én ezt 10méteres távolsággal mértem. XD
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 december 22, 21:43
Írta: s7manbs8 Dátum 2010 december 22, 21:43
Amit magam csináltam az se áll be, meg a motorok se egyformák, mindhez külön be kéne lőni a vezérlőt egy táblázattal az egész körülfordulását azt annyi.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 december 22, 22:00
Írta: Evodiron Dátum 2010 december 22, 22:00
A túlhajtáson mit értesz? A valós lépésig való eljutást?
Igazából nem is várom el, hogy pontossak legyenek a mikrolépések (a rendes lépés az úgyis jó lesz), de azért ezeket a nagy ugrásokat kihagyhatná. :)
Igazából nem is várom el, hogy pontossak legyenek a mikrolépések (a rendes lépés az úgyis jó lesz), de azért ezeket a nagy ugrásokat kihagyhatná. :)
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 december 22, 22:03
Írta: me3ua0a6 Dátum 2010 december 22, 22:03
Túlhajtás: 1.2A-es motort 2A-ral meghajtva. Ez a motorra nézve negyed óra alatt halálos, viszont lineáris lesz a lépés. Féllépésben még jó!
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 december 22, 22:03
Írta: Evodiron Dátum 2010 december 22, 22:03
A motor sípoló hangja is más lesz egyes lépéseknél. A L297-L298-as vezérlő is ugyan ezt csinálta több motorral is fél lépésben, hogy más volt a hangja egy bizonyos állásban. És hát a motor tekercsei sem biztos, hogy teljesen egyformák.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 december 22, 22:04
Írta: Evodiron Dátum 2010 december 22, 22:04
Végülis meg lehet próbálni, vezérlő tudja a 2A-t, a motor meg majd kicsit melegszik... :D
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 december 22, 22:05
Írta: s7manbs8 Dátum 2010 december 22, 22:05
Az természetes dolog, ugyanis az áramra önbeálló fix kikapcsolási idejű működés miatt a frekvencia változik és azt lehet hallani hogy más állásban más lesz.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 december 22, 22:05
Írta: s7manbs8 Dátum 2010 december 22, 22:05
És ha hűtöd, akkor nem bírja ?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 december 22, 22:07
Írta: s7manbs8 Dátum 2010 december 22, 22:07
Na én most meg egy sima 220 V-os motorral szórakoztam itt pár napot, azt hittem ez megy a végtelenségig, de kiderült hogy nem nagyon tettem is rá 2 ventilátort mosóüzemű valami régifajta magyar automata mosógép motor és még ráadásul 220V-os, nem 230 nyilván, az is számít valamicskét gondolom.
Cím: Re:Léptetőmotor
Írta: Evodiron Dátum 2010 december 22, 22:13
Írta: Evodiron Dátum 2010 december 22, 22:13
Ha nincs rajta ventilátor, akkor az melegedni is fog. :)
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 december 22, 22:16
Írta: me3ua0a6 Dátum 2010 december 22, 22:16
Magyar automata mosógép motor? XD
Durván hangzik már ez is :D
Durván hangzik már ez is :D
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 december 22, 22:19
Írta: s7manbs8 Dátum 2010 december 22, 22:19
Mert, ja bocs amúgy jugoszláv gyártmány, csak magyar automatába volt. :) Mondjuk már az az ország sincs, utána jön az az ország, amibe volt ?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 december 22, 22:19
Írta: s7manbs8 Dátum 2010 december 22, 22:19
Nem elég, ha rajta van, még forgatni is kell. :)
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 december 22, 22:36
Írta: me3ua0a6 Dátum 2010 december 22, 22:36
Simán :D Mi szépre használtad? Csak nem cnc/eszterga meghajtásra? :D
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 december 23, 00:15
Írta: s7manbs8 Dátum 2010 december 23, 00:15
Távcső tükör csiszoláshoz egy ilyen kis asztalra felszerelve forgó tengely.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 december 23, 00:16
Írta: s7manbs8 Dátum 2010 december 23, 00:16
De egy 2 dimenziós x-y játékost lehet fölé szerkesztek majd, ami már cnc lesz.
Cím: Re:Léptetőmotor
Írta: 2vkx6unz Dátum 2010 december 28, 23:06
Írta: 2vkx6unz Dátum 2010 december 28, 23:06
Szia!
Meg tudod mondani valójában mekkora a vezérlő mérete, az Ebay-en 18x14x4cm de a 4 tengelyes meg csak 18x11x4 cm és ez pont egy vezérlőnyivel szélesebb. Valamelyik méret nem igaz...
Meg tudod mondani valójában mekkora a vezérlő mérete, az Ebay-en 18x14x4cm de a 4 tengelyes meg csak 18x11x4 cm és ez pont egy vezérlőnyivel szélesebb. Valamelyik méret nem igaz...
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 december 29, 11:17
Írta: me3ua0a6 Dátum 2010 december 29, 11:17
3 tengelyes: 18*11*4cm.
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 december 29, 11:21
Írta: me3ua0a6 Dátum 2010 december 29, 11:21
Mi lehet a probléma a következő esetben:
Előszedtem pár léptetőmotort, (különböző márkájúak, különböző áramúak), amik vezérlő tesztelés közben azt produkálják, hogy 1000-es sebességnél szépen forognak, de 200-as sebességnél akadoznak, lépést vesztenek.(mm/min)
Ez mitől lehet?
Előszedtem pár léptetőmotort, (különböző márkájúak, különböző áramúak), amik vezérlő tesztelés közben azt produkálják, hogy 1000-es sebességnél szépen forognak, de 200-as sebességnél akadoznak, lépést vesztenek.(mm/min)
Ez mitől lehet?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 december 29, 13:07
Írta: s7manbs8 Dátum 2010 december 29, 13:07
Biztos ott van rezonancia pontjuk aztán nem szeretik, főleg ha nem mikrolépésezel gondolom én.
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 december 29, 14:21
Írta: me3ua0a6 Dátum 2010 december 29, 14:21
Nagyon úgy tűnik. Egészlépés, de nem gondoltam volna, hogy ilyen... 0.85A-es motor, és 300mA-el hajtva, nem veszít lépést :( szomorú XD
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2010 december 29, 15:04
Írta: s7manbs8 Dátum 2010 december 29, 15:04
EMLÉKSZEM ÉN IS MENNYIRe ÖrÜLTEM MIKOr VALAMI VEZÉRLŐT ÖSSZEÉPÍTETTEM , AZTÁN MIKOR elkezdtem tesztelni bizonyos lassabb frekiknél piszkosul nem akart lépkedni normálisan, ha kap valami fix terhelést ami csillapít úgymond, akkor az segít sokat, de találkoztam olyan motorral is, ami akkor se volt jó, pedig vadonás új volt, aztán a mikrolépéssel azért az is ment gond nélkül olyan 1/8 már jó volt neki.
Cím: Re:Léptetőmotor
Írta: 88nwcf22d Dátum 2010 december 29, 17:04
Írta: 88nwcf22d Dátum 2010 december 29, 17:04
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2010 december 29, 18:17
Írta: 35kpazcgr Dátum 2010 december 29, 18:17
Ez szerintem csak egy 5 tengelyes nyomtatóport illesztő.
A motor meghajtókat nem tartalmazza.
A motor meghajtókat nem tartalmazza.
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2010 december 31, 11:32
Írta: Miki2 Dátum 2010 december 31, 11:32
Nem vagyok benne biztos, de úgy tudom egy nyomtató port csak négy tengely vezérlésére alkalmas.
Vagy nagyot tévedek?
Vagy nagyot tévedek?
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 december 31, 13:41
Írta: me3ua0a6 Dátum 2010 december 31, 13:41
Mach3 alapján: 12 kimenet és 5 bemenet használható.
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2010 december 31, 13:48
Írta: Miki2 Dátum 2010 december 31, 13:48
Ezek szerin az 1÷14÷16÷17 kimenetek közül kettőt-kettőt párba véve egy LPT portról akár 6 motor is vezérelhető?
Legfeljebb nem lesz relés vagy más kimenet.
Legfeljebb nem lesz relés vagy más kimenet.
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2010 december 31, 13:59
Írta: me3ua0a6 Dátum 2010 december 31, 13:59
Ha a program is tudja, akkor igen. Én most tesztelem a vezérlőmet, és az 1-14-es lábon kapja a step-dirt.
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2010 december 31, 14:09
Írta: Miki2 Dátum 2010 december 31, 14:09
Akkor ezt tesztelnem kell.
Cím: Re:Léptetőmotor
Írta: 279nwbpsa Dátum 2010 december 31, 16:34
Írta: 279nwbpsa Dátum 2010 december 31, 16:34
Egy kis segítséget kérnék.
24V/16A-es trafóból bütykölnék tápot,de kondiból nincsen itthon két egyforma. :(
50V/10000 és 50v/6800-as van.Jó így ezzel a táp?
24V/16A-es trafóból bütykölnék tápot,de kondiból nincsen itthon két egyforma. :(
50V/10000 és 50v/6800-as van.Jó így ezzel a táp?
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2010 december 31, 16:36
Írta: Rabb Ferenc Dátum 2010 december 31, 16:36
Persze, hogy jó! Kösd párhuzamosan a kondikat, és BÚÉK!
Cím: Re:Léptetőmotor
Írta: 279nwbpsa Dátum 2010 december 31, 16:47
Írta: 279nwbpsa Dátum 2010 december 31, 16:47
Nem voltam benne biztos...Köszönöm!
Boldog Új Évet neked is és minden fórumozónak!
Boldog Új Évet neked is és minden fórumozónak!
Cím: Re:Léptetőmotor
Írta: j99i206if Dátum 2011 január 04, 22:35
Írta: j99i206if Dátum 2011 január 04, 22:35
Írt egy olvtárs nekem a gamma gyártmányú motorokkal kapcsolatban. Nem tudok válaszolni mert visszapattan. Tehát nem tudok róluk semnmit én se.
Cím: Re:Léptetőmotor
Írta: m8j2y7u9n Dátum 2011 január 13, 19:51
Írta: m8j2y7u9n Dátum 2011 január 13, 19:51
Segítséget szeretnék kérni léptetőmotorral kapcsolatban. Szétbontottam egy nyomtatót amiben volt 2 léptető motor, de nem sikerült találnom róluk információt. Az után érdeklődnék esetleg tud valaki valami információt róluk.
Cím: Re:Léptetőmotor
Írta: m8j2y7u9n Dátum 2011 január 13, 19:54
Írta: m8j2y7u9n Dátum 2011 január 13, 19:54
Cím: Re:Léptetőmotor
Írta: 9ah5mpgwm Dátum 2011 január 13, 19:56
Írta: 9ah5mpgwm Dátum 2011 január 13, 19:56
milyen típusú nyomtató??kép a motorrol?
Cím: Re:Léptetőmotor
Írta: 9ah5mpgwm Dátum 2011 január 13, 20:01
Írta: 9ah5mpgwm Dátum 2011 január 13, 20:01
ha a kissebbik 4cm körüli akkor az kb 1A a nagyobb akár 2A is lehet kb
Nekem az Y-t akkorka motor viszi mint a kicsi,
a Z-t pedig 2olyan mint a nagy de a Z-n 250wkress motor és furtuna van kb1.5kg és mint a szél emelgetik de azok (mint a nagy) 0.65A esek csak.
Nekem az Y-t akkorka motor viszi mint a kicsi,
a Z-t pedig 2olyan mint a nagy de a Z-n 250wkress motor és furtuna van kb1.5kg és mint a szél emelgetik de azok (mint a nagy) 0.65A esek csak.
Cím: Re:Léptetőmotor
Írta: m8j2y7u9n Dátum 2011 január 13, 20:08
Írta: m8j2y7u9n Dátum 2011 január 13, 20:08
Olivetti PR2 típusú nyomtatóból szedtem ki őket. A kisebbik 42x42mm a magassága 38mm. A nagyobbik pedig 56mm átmérőjű és 50mm magas.
Cím: Re:Léptetőmotor
Írta: 9ah5mpgwm Dátum 2011 január 13, 20:12
Írta: 9ah5mpgwm Dátum 2011 január 13, 20:12
A típusszámokra sem hozott a google semmit??
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2011 január 13, 20:13
Írta: s7manbs8 Dátum 2011 január 13, 20:13
Lesz az kisebb 0.75A és nagyobb 1.3-1.5A is.
Cím: Re:Léptetőmotor
Írta: m8j2y7u9n Dátum 2011 január 13, 20:14
Írta: m8j2y7u9n Dátum 2011 január 13, 20:14
Csak japán feliratozású oldalt sikerült találnom. De azon kívül semmit.
Cím: Re:Léptetőmotor
Írta: 9ah5mpgwm Dátum 2011 január 13, 20:15
Írta: 9ah5mpgwm Dátum 2011 január 13, 20:15
az gáz.marad a méregetés és a tesztelés.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2011 január 13, 20:17
Írta: s7manbs8 Dátum 2011 január 13, 20:17
icsniszancsi ennyit tudok segíteni :)
Cím: Re:Léptetőmotor
Írta: 9ah5mpgwm Dátum 2011 január 13, 20:18
Írta: 9ah5mpgwm Dátum 2011 január 13, 20:18
nekem is van két hatalmas léptecsem 13cmx15cm10mm tengellyel,azon még írás sincs pedig 3 is van belőle,hajtottam már 5A val és ment mint állat de nem is melegedett.úgyhogy hajtsad emelgesd az áramot,ha melegszik vagy netán már füstöl akkor sokkkkkk :-))))
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2011 január 13, 20:23
Írta: 35kpazcgr Dátum 2011 január 13, 20:23

Cím: Re:Léptetőmotor
Írta: 9ah5mpgwm Dátum 2011 január 13, 20:28
Írta: 9ah5mpgwm Dátum 2011 január 13, 20:28
alakul ez
Cím: Re:Léptetőmotor
Írta: m8j2y7u9n Dátum 2011 január 13, 20:30
Írta: m8j2y7u9n Dátum 2011 január 13, 20:30
Megmértem a tekercs ellenállást és az csak 1 Ohm. Ugyan 6 kivezetéses csatlakozó van a motoron, de csak 4 kivezetés van bekötve.
Cím: Re:Léptetőmotor
Írta: m8j2y7u9n Dátum 2011 január 13, 20:32
Írta: m8j2y7u9n Dátum 2011 január 13, 20:32
A kisebbik motor 4 kivezetéses és 3,7 Ohm a tekercsellenállás.
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2011 január 13, 20:33
Írta: 35kpazcgr Dátum 2011 január 13, 20:33
A kisebbik talán ezekhez hasonló:
17hs
17hs
Cím: Re:Léptetőmotor
Írta: m8j2y7u9n Dátum 2011 január 13, 20:42
Írta: m8j2y7u9n Dátum 2011 január 13, 20:42
Köszönöm a segítséget.
Cím: Re:Léptetőmotor
Írta: kzoli Dátum 2011 január 14, 19:37
Írta: kzoli Dátum 2011 január 14, 19:37
Ez a léptetőmoci vajon elegendő egy bútorlap alapú pici cnc mozgatásához? Nekem kétségeim vannak ezzel kapcsolatban.
Sanyo Denki képek
Sanyo Denki képek
Cím: Re:Léptetőmotor
Írta: designr Dátum 2011 január 14, 19:49
Írta: designr Dátum 2011 január 14, 19:49
Elvonszolja..DE hidd el hogy már nem drágák az ettől erősebb,akár unipoláris régebbi nyomtatókból mentett motorok,a géped költségvetését nem ez fogja megdobni..,olcsón volt nemrég itt is kínálva,találkozón pár ezresért kapsz egy "zsákkal"1-1.5 A-os mocikat.Vezérlő,mechanika,sinrendszer..ha már építessz 5-6 ezer ft nem sok 3 kicsit nagyobb mociért,és akkor a mozgatást nem úgy kezded hogy egyből motorcsere..
Cím: Re:Léptetőmotor
Írta: kzoli Dátum 2011 január 14, 20:12
Írta: kzoli Dátum 2011 január 14, 20:12
Rendben. Köszönöm a tanácsot.
Akkor viszont akinek lenne eladó 3 db ezeknél combosabb motorja kérem küldjön privát üzenetet...
:D
Akkor viszont akinek lenne eladó 3 db ezeknél combosabb motorja kérem küldjön privát üzenetet...
:D
Cím: Re:Léptetőmotor
Írta: 6fabbzvm Dátum 2011 január 22, 15:11
Írta: 6fabbzvm Dátum 2011 január 22, 15:11
Bizonytalan vagyok egy vezérlő választásban.
A motorról amit tudunk:

Szeretném a maximális nyomatékát (6,2Nm) kihasználni. Leírom én hogy gondolom és remélem valaki kisegít, ha hüleséget írtam!
Tehát max. nyomaték, ami szóba jöhet vezetékek elkötése szempontjából a bipoláris soros ill. párhuzamos. Ha soros akkor 4x induktivitás, ha párhuzamos akkor 2x áram/tekercs, ugye!?
A 2x-es áram oké, h olyan vezérlő kell ebben az esetben ami legalább 4A-re képes, de a 4x induktivitás az miben befolyásolja a vezérlő választásom!? És a feszültség... motor alapfeszültségéhez képest mekkora motor tápfeszültséget használhatok ebben az esetben?
Köszönöm előre is! [#worship]
A motorról amit tudunk:
Szeretném a maximális nyomatékát (6,2Nm) kihasználni. Leírom én hogy gondolom és remélem valaki kisegít, ha hüleséget írtam!
Tehát max. nyomaték, ami szóba jöhet vezetékek elkötése szempontjából a bipoláris soros ill. párhuzamos. Ha soros akkor 4x induktivitás, ha párhuzamos akkor 2x áram/tekercs, ugye!?
A 2x-es áram oké, h olyan vezérlő kell ebben az esetben ami legalább 4A-re képes, de a 4x induktivitás az miben befolyásolja a vezérlő választásom!? És a feszültség... motor alapfeszültségéhez képest mekkora motor tápfeszültséget használhatok ebben az esetben?
Köszönöm előre is! [#worship]
Cím: Re:Léptetőmotor
Írta: keri Dátum 2011 január 22, 17:47
Írta: keri Dátum 2011 január 22, 17:47
Nem értek valamit. Miért 4 szeres az induktivitás soros kötésnél?
Szerintem csak kétszeres.
Na de mindegy is, nem erre voltál kíváncsi.
Igen, párhuzamos kötésnél kétszer akkora áramot hajthatsz bele, sorosnál pedig az előírt áramot.
Az áram erősség és a tekercs menetszámának szorzata határozza meg a gerjesztés mértékét, és ez közvetlenül arányos a kifejtett mágneses erővel, vagyis a nyomatékkal.
Tehát a tartó nyomatékod (azaz álló helyzetben) 6,4Nm lesz, ha a névleges áramot hajtod bele. Namost azt nem tudom, csak valószínűsítem, hogy ezt a nyomatékot unipoláris, kötésre adták meg.
Bipolárisban ez még tovább növekedhet, de nem a duplájára, mert itt nem a vezeték keresztmetszet a korlátozó tényező, hanem a vas mágneses telítődése, illetve a hőtermelődés.
Azt hiszem a hobbycnc.hu oldalon olvastam a léptető motorokról szóló részben, hogy kb. 30%-al növeli a bipoláris használata a teljesítményt.
A megadott feszültség érték arra vonatkozik, hogy álló helyzetben, ekkora feszültséget köthetsz tartósan a motorra, aminek hatására a megadott áram fog folyni.
Ugye ilyenkor az induktivitás nem, csak az Ohmos ellenállás számít. Ha megnézed sima Ohm törvénnyel lehet számolni a táblázatban szereplő áramból és ellenállás értékből ezt a feszültséget. Ez az azonban téged nem nagyon érdekel. Mivel mozgás közben a léptetési frekvenciából és az induktivitásból számolhatod az induktív reaktanciát, azaz a látszólagos ellenállást, ami a fordulatszám növekedésével növekedni fog.
Na most ha ismered az Ohm törvényt azt is tudod már, hogy nagyobb ellenálláson ugyan azt az áramot, csak nagyobb feszültséggel lehet áthajtani.
Tehát a feszültség bármi lehet (kb. 100Vig, amíg a tekercselés át nem húz), a lényeg hogy az áramot tartsad. Ebből következik, hogy a motor maximális fordulatszámát, viszont a vezérlő max. feszültsége határozza meg.
Tehát ha van egy 30V 3A-es vezérlőd, akkor a soros/párhuzamos kötéssel eldöntheted, hogy soros kötésben kihasználod a maximális tartónyomatékot, és az alacsony fordulaton nyújtott nyomatékot, vagy ezt feláldozva inkább nagyobb sebességtartományban akarsz némi plusz nyomatékra szert tenni. Persze ha szerencséd, van akkor a melegedés miatt párhuzamos kötésben pont 3A-t lehet belehajtani, és akkor egyértelműen a párhuzamos kötés a jó neked.
Szóval olyan vezérlőt keress ami a tartalék miatt tud 4Ampert és minnél nagyobb feszültséget.
De a 30V 3A is elég jó, a végén meg úgy is a pénzed dönt mit veszel.
[#smile]
Én úgy szoktam a motor áramot meghatározni, hogy ráteszek egy hőmérőt, és elkezdem hajtani úgy hogy 50foknál ne melegedjen jobban.
Rövid ideig dupla áramot is bele lehet küldeni, de ekkor már a vas telítődése miatt nem biztos hogy dupla erő is lesz a motorban.
Szerintem csak kétszeres.
Na de mindegy is, nem erre voltál kíváncsi.
Igen, párhuzamos kötésnél kétszer akkora áramot hajthatsz bele, sorosnál pedig az előírt áramot.
Az áram erősség és a tekercs menetszámának szorzata határozza meg a gerjesztés mértékét, és ez közvetlenül arányos a kifejtett mágneses erővel, vagyis a nyomatékkal.
Tehát a tartó nyomatékod (azaz álló helyzetben) 6,4Nm lesz, ha a névleges áramot hajtod bele. Namost azt nem tudom, csak valószínűsítem, hogy ezt a nyomatékot unipoláris, kötésre adták meg.
Bipolárisban ez még tovább növekedhet, de nem a duplájára, mert itt nem a vezeték keresztmetszet a korlátozó tényező, hanem a vas mágneses telítődése, illetve a hőtermelődés.
Azt hiszem a hobbycnc.hu oldalon olvastam a léptető motorokról szóló részben, hogy kb. 30%-al növeli a bipoláris használata a teljesítményt.
A megadott feszültség érték arra vonatkozik, hogy álló helyzetben, ekkora feszültséget köthetsz tartósan a motorra, aminek hatására a megadott áram fog folyni.
Ugye ilyenkor az induktivitás nem, csak az Ohmos ellenállás számít. Ha megnézed sima Ohm törvénnyel lehet számolni a táblázatban szereplő áramból és ellenállás értékből ezt a feszültséget. Ez az azonban téged nem nagyon érdekel. Mivel mozgás közben a léptetési frekvenciából és az induktivitásból számolhatod az induktív reaktanciát, azaz a látszólagos ellenállást, ami a fordulatszám növekedésével növekedni fog.
Na most ha ismered az Ohm törvényt azt is tudod már, hogy nagyobb ellenálláson ugyan azt az áramot, csak nagyobb feszültséggel lehet áthajtani.
Tehát a feszültség bármi lehet (kb. 100Vig, amíg a tekercselés át nem húz), a lényeg hogy az áramot tartsad. Ebből következik, hogy a motor maximális fordulatszámát, viszont a vezérlő max. feszültsége határozza meg.
Tehát ha van egy 30V 3A-es vezérlőd, akkor a soros/párhuzamos kötéssel eldöntheted, hogy soros kötésben kihasználod a maximális tartónyomatékot, és az alacsony fordulaton nyújtott nyomatékot, vagy ezt feláldozva inkább nagyobb sebességtartományban akarsz némi plusz nyomatékra szert tenni. Persze ha szerencséd, van akkor a melegedés miatt párhuzamos kötésben pont 3A-t lehet belehajtani, és akkor egyértelműen a párhuzamos kötés a jó neked.
Szóval olyan vezérlőt keress ami a tartalék miatt tud 4Ampert és minnél nagyobb feszültséget.
De a 30V 3A is elég jó, a végén meg úgy is a pénzed dönt mit veszel.
[#smile]
Én úgy szoktam a motor áramot meghatározni, hogy ráteszek egy hőmérőt, és elkezdem hajtani úgy hogy 50foknál ne melegedjen jobban.
Rövid ideig dupla áramot is bele lehet küldeni, de ekkor már a vas telítődése miatt nem biztos hogy dupla erő is lesz a motorban.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2011 január 22, 17:48
Írta: keri Dátum 2011 január 22, 17:48
Ja bocs, látom hogy 3kg-os motorod van. Erre nem tudom mennyire alkalmas a 30V 3A vezérlő. Lehet hogy ide már nagyobb kakakó kell.
Cím: Re:Léptetőmotor
Írta: 6fabbzvm Dátum 2011 január 22, 18:58
Írta: 6fabbzvm Dátum 2011 január 22, 18:58
Keri, köszönöm kimerítő választ![#eljen]
Igen, ez NEMA34-es motor. Én egy 50V 4,2A vezérlőt néztem ki hozzá, csak nem vagyok biztos a dolgomba azért kérdeztem.
Igen, ez NEMA34-es motor. Én egy 50V 4,2A vezérlőt néztem ki hozzá, csak nem vagyok biztos a dolgomba azért kérdeztem.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 január 27, 14:42
Írta: 000000000 Dátum 2011 január 27, 14:42
Üdv.
Szerintetek ez a vezérlő 5 tengelyes vezérlő TB6560 3A elterelget 3x ilyen léptescet:
NEMA34 (86mm) 2 fázisú léptetőmotor, 1.8 fok, 4.0Nm nyomaték
Tekercsadatok:
Áram:2,5A
Ellenállás:0,76Ohm
Feszültség:1,9V
Induktivitás:3,8mH
Kivezetések száma:8
Tengelyvég:14
Súly:2,4Kg
Szerintetek ez a vezérlő 5 tengelyes vezérlő TB6560 3A elterelget 3x ilyen léptescet:
NEMA34 (86mm) 2 fázisú léptetőmotor, 1.8 fok, 4.0Nm nyomaték
Tekercsadatok:
Áram:2,5A
Ellenállás:0,76Ohm
Feszültség:1,9V
Induktivitás:3,8mH
Kivezetések száma:8
Tengelyvég:14
Súly:2,4Kg
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2011 január 27, 15:53
Írta: Miki2 Dátum 2011 január 27, 15:53
Ha a motor tekercseit sorosan kötöd, vanrá esély.
Párhuzamos kötés esetén az áramfelvétel a duplájára nő !!!
Párhuzamos kötés esetén az áramfelvétel a duplájára nő !!!
Cím: Re:Léptetőmotor
Írta: keri Dátum 2011 január 27, 16:09
Írta: keri Dátum 2011 január 27, 16:09
Nem értem miért ilyen bazi nagy motorokkal hajt meg mindent, mindenki?
LZ meglehetősen nagy marógépén a 3Nm-es motorokat le kellet korlátozni, mert a nagy gyorsulás szétverte volna a gépet.
Vagy ennyire olcsón szerzitek ezeket a motorokat? Szerezzetek már nekem is :D
LZ meglehetősen nagy marógépén a 3Nm-es motorokat le kellet korlátozni, mert a nagy gyorsulás szétverte volna a gépet.
Vagy ennyire olcsón szerzitek ezeket a motorokat? Szerezzetek már nekem is :D
Cím: Re:Léptetőmotor
Írta: sanyi84 Dátum 2011 január 27, 16:12
Írta: sanyi84 Dátum 2011 január 27, 16:12
Nem mindenki Nemes úr legalább bemutatta van élet a kisebb motorok felé is.
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2011 január 27, 16:26
Írta: Miki2 Dátum 2011 január 27, 16:26
Még valami, amit a tapasztalat mondat velem.
A 36 V maximális feszültségtől ne várd, hogy repülőgép lesz.
Az ilyen nagy motorokhoz legalább 80 v-os feszültség kellene, hogy kihozd belőle a maximumot.
A 36 V maximális feszültségtől ne várd, hogy repülőgép lesz.
Az ilyen nagy motorokhoz legalább 80 v-os feszültség kellene, hogy kihozd belőle a maximumot.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 február 07, 14:59
Írta: 000000000 Dátum 2011 február 07, 14:59
Üdv mindenki, szakértők véleményét kérném a két motorról:
Motor 1:
Amps/Phase: 0.67 A
Holding Torque: 2.68 Nm
Rotor Inertia: 0.0612
Phase Inductance mH: 136
Phase Resistance ±10%: 23.5
Winding Type: 4-wire Parallel
Motor 2:
Amps/Phase: 2.7 A
Holding Torque: 1.27 Nm
Rotor Inertia (kg-m2 x10-3): 0.0248
Phase Inductance mH: 4,6
Phase Resistance ±10%: 0.85
Winding Type: 4-wire Parallel
Van egy #2903 - ban említett vezérlőm.
Namármost ha jól értem ezek bipoláris mocik mert 4 kivezetés van rajtuk, és írva vagyon hogy Paralell (párhuzamos), akkor a fent említett adatok
Motor 1 -> 0.67A
Motor 2 -> 2.7 A
Akkor teljesülnek ha párhuzamosan kötöm be a léptecset vagy akkor még ezek 2x-se ?
Vagy a 4 vezetékes mocikat nem lehet variálni hogy soros vagy párhuzamos kötés? (elektrohoz nemnagyon konyítok ;) (még :P))
Motor 1:
Amps/Phase: 0.67 A
Holding Torque: 2.68 Nm
Rotor Inertia: 0.0612
Phase Inductance mH: 136
Phase Resistance ±10%: 23.5
Winding Type: 4-wire Parallel
Motor 2:
Amps/Phase: 2.7 A
Holding Torque: 1.27 Nm
Rotor Inertia (kg-m2 x10-3): 0.0248
Phase Inductance mH: 4,6
Phase Resistance ±10%: 0.85
Winding Type: 4-wire Parallel
Van egy #2903 - ban említett vezérlőm.
Namármost ha jól értem ezek bipoláris mocik mert 4 kivezetés van rajtuk, és írva vagyon hogy Paralell (párhuzamos), akkor a fent említett adatok
Motor 1 -> 0.67A
Motor 2 -> 2.7 A
Akkor teljesülnek ha párhuzamosan kötöm be a léptecset vagy akkor még ezek 2x-se ?
Vagy a 4 vezetékes mocikat nem lehet variálni hogy soros vagy párhuzamos kötés? (elektrohoz nemnagyon konyítok ;) (még :P))
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2011 február 07, 16:17
Írta: Szalai György Dátum 2011 február 07, 16:17
Le is írtad a választ.
„a 4 vezetékes mocikat nem lehet variálni hogy soros vagy párhuzamos kötés”
„Motor 1: Amps/Phase: 0.67 A Motor 2: Amps/Phase: 2.7 A”
Ha mégsem elég az erő, akkor tolhatod neki óvatosan feljebb is a csúcs áramot, csak a melegedésekre figyelj, 60-70C-foknál ne fűtsd jobban a motorokat. (A tartóáram visszavételkor úgysem folyik annyi.)
„a 4 vezetékes mocikat nem lehet variálni hogy soros vagy párhuzamos kötés”
„Motor 1: Amps/Phase: 0.67 A Motor 2: Amps/Phase: 2.7 A”
Ha mégsem elég az erő, akkor tolhatod neki óvatosan feljebb is a csúcs áramot, csak a melegedésekre figyelj, 60-70C-foknál ne fűtsd jobban a motorokat. (A tartóáram visszavételkor úgysem folyik annyi.)
Cím: Re:Léptetőmotor
Írta: wcsxp0uxa Dátum 2011 február 12, 13:03
Írta: wcsxp0uxa Dátum 2011 február 12, 13:03
Sziasztok!
Bár kb 2 hete történt velem ,azért megkérdem.
Létetőmotorom elgyengült úgy 1 napra , s másnap
reggel amikor adtam neki 1 utolsó lehetőséget elindult ,csak a forgási irányokat felcserélte.
lehetséges ez?
Bár kb 2 hete történt velem ,azért megkérdem.
Létetőmotorom elgyengült úgy 1 napra , s másnap
reggel amikor adtam neki 1 utolsó lehetőséget elindult ,csak a forgási irányokat felcserélte.
lehetséges ez?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 február 12, 13:21
Írta: 000000000 Dátum 2011 február 12, 13:21
Az alábbi hiba felderítési kezdő tesztet javaslom:
kikapcsolt vezérlő mellett zárd rövidre a léptető motorod tekercsét, miközben kézzel tekered a tengelyét. Mit tapasztalsz ekkor?
kikapcsolt vezérlő mellett zárd rövidre a léptető motorod tekercsét, miközben kézzel tekered a tengelyét. Mit tapasztalsz ekkor?
Cím: Re:Léptetőmotor
Írta: wcsxp0uxa Dátum 2011 február 12, 13:28
Írta: wcsxp0uxa Dátum 2011 február 12, 13:28
Gyakorlatilag simán ,ellenállás nélkül mozgott.
mérgemben kikötöttem ,de nem szereltem ki.
Másnap papírról visszakötöttem és ezt produkálta.
mérgemben kikötöttem ,de nem szereltem ki.
Másnap papírról visszakötöttem és ezt produkálta.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 február 12, 13:42
Írta: 000000000 Dátum 2011 február 12, 13:42
Ezt a tesztemre írtad? Azaz a motorod akkor is úgy forog, és nem akadozva, döccenősen, nehezebben, ha rövidre zárod a tekercseit?
(Használd a válasz menüt lehetőleg...)
(Használd a válasz menüt lehetőleg...)
Cím: Re:Léptetőmotor
Írta: wcsxp0uxa Dátum 2011 február 12, 13:46
Írta: wcsxp0uxa Dátum 2011 február 12, 13:46
Bocsánat!
igen a tesztre írtam.
igen a tesztre írtam.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 február 12, 14:00
Írta: 000000000 Dátum 2011 február 12, 14:00
Akkor valószínűleg a motorod tönkrement (legyengültek a mágnes pólusai, stb...), bár ez elég ritka, ha nem hajtod túl, azaz pl. nem forrósodik fel menetközben.
Cím: Re:Léptetőmotor
Írta: wcsxp0uxa Dátum 2011 február 12, 14:31
Írta: wcsxp0uxa Dátum 2011 február 12, 14:31
Én is azt hittem ,de nem .
Majdnem 100%-osnak éreztem utána,csak a forgási irány változott meg.
Majdnem 100%-osnak éreztem utána,csak a forgási irány változott meg.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 február 25, 21:41
Írta: 000000000 Dátum 2011 február 25, 21:41
a segítségét kérném valakinek a 6 kivezetéses léptető motoron van 6 ér fekete-sárga-zöld-fekete fehér kék
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 február 25, 21:42
Írta: 000000000 Dátum 2011 február 25, 21:42
a rajz szerint az A+
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 február 25, 21:47
Írta: 000000000 Dátum 2011 február 25, 21:47
A+ fekete sárga A- sárga zöld B+ ....a két pólust összekötni [#conf][#conf]
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2011 február 27, 00:29
Írta: 3k74cecek Dátum 2011 február 27, 00:29
Mi a kérdés ???
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 február 27, 00:47
Írta: 000000000 Dátum 2011 február 27, 00:47
6 VEZETÉKES LÉPTETŐMOTOR BEKÖTÉSE
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 február 27, 00:50
Írta: 000000000 Dátum 2011 február 27, 00:50
létezhet az hogy A+ fekete+ sárga A- zöld sárga tehát a sárgátketté választom és A+ és A- ba is bekötöm ( képletesen a színek)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2011 február 27, 01:03
Írta: s7manbs8 Dátum 2011 február 27, 01:03
mi az a A+ A- meg B+ stb. ? valami bipoláris vezérlő kimenete ?
ha igen, akkor bekötheted úgy, hogy
fekete-sárga = A+ A-
fekete-fehér = B+ B-
szerintem. mert a tekercs kötése olyan lehet, hogy
fekete a közös pontjuk és
fekete-sárga, fekete-zöld az azonos ellenállás ha mérnéd
illetve a másik független tekercs meg
fekete-fehér, fekete-kék
ha igen, akkor bekötheted úgy, hogy
fekete-sárga = A+ A-
fekete-fehér = B+ B-
szerintem. mert a tekercs kötése olyan lehet, hogy
fekete a közös pontjuk és
fekete-sárga, fekete-zöld az azonos ellenállás ha mérnéd
illetve a másik független tekercs meg
fekete-fehér, fekete-kék
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 február 27, 01:25
Írta: 000000000 Dátum 2011 február 27, 01:25
Helló elektron PUL+ PUL- DIR+ DIR- MSD 50 40.2 vezérlőre szeretném rákötni mérni sajnos én nem tudom de van rajzom a motorhoz hogy hogyan kössem csak furcsa hogy 1 színt két helyre bekössek [#conf][#csodalk] --- és hogy áll a projekted??
Cím: Re:Léptetőmotor
Írta: xfg6v697j Dátum 2011 február 27, 06:02
Írta: xfg6v697j Dátum 2011 február 27, 06:02
hány vezetékes a motor.
mert ere a tipusra 4 6 és 8 vezetékest is be lkehet kötni.
mert ere a tipusra 4 6 és 8 vezetékest is be lkehet kötni.
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2011 február 27, 09:11
Írta: Rabb Ferenc Dátum 2011 február 27, 09:11
A hat kivezetés lehet gyárilag közösített középkivezetésű unipoláris, vagy csillagba kötött ötfázisú motor. Az MSD viszont bipoláris vezérlő. Tehát így egyikkel sem házasíthatók.
Ha unipoláris, és hozzáférhető a közösített középkivezetés, akkor az átköthető bipolárisra. Ha nem, akkor csak részben tudod kihasználni a lehetőségeit. Vagy csak egy-egy tekercset használsz, vagy a sorbakötötteket. (ki kell mérni, ki kinek a barátja) Egy kis segítség ennek az oldalnak az alján van.
Mi a motorod pontos típusa?
Ha unipoláris, és hozzáférhető a közösített középkivezetés, akkor az átköthető bipolárisra. Ha nem, akkor csak részben tudod kihasználni a lehetőségeit. Vagy csak egy-egy tekercset használsz, vagy a sorbakötötteket. (ki kell mérni, ki kinek a barátja) Egy kis segítség ennek az oldalnak az alján van.
Mi a motorod pontos típusa?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 február 27, 10:41
Írta: 000000000 Dátum 2011 február 27, 10:41
A motor típusa PK245-02A-C6 talán kétfázisú motor nagyon kicsi a vezérlő pedig MSD40/3.2
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2011 február 27, 11:06
Írta: 3k74cecek Dátum 2011 február 27, 11:06
Használhatnál némi írásjelet, mondjuk vesszőt, hogy érthető legyen amit leírsz.
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2011 február 27, 11:30
Írta: Rabb Ferenc Dátum 2011 február 27, 11:30
Itt a vezérlő és a motor adatlapja. A motor bekötését a B-197, egyéb adatait a B-208 oldalon találod.
A sorbakötött tekercsek szélső kivezetéseit kell bekötni a vezérlőbe. Előtte esetleg kimérheted ellenállásmérővel, hogy tényleg azok a színű vezetékek-e, mint azt az adatlap írja.
Sok sikert a továbbiakhoz [#wave]
A sorbakötött tekercsek szélső kivezetéseit kell bekötni a vezérlőbe. Előtte esetleg kimérheted ellenállásmérővel, hogy tényleg azok a színű vezetékek-e, mint azt az adatlap írja.
Sok sikert a továbbiakhoz [#wave]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 február 27, 12:24
Írta: 000000000 Dátum 2011 február 27, 12:24
NAGYON KÖSZÖNÖM A GYORS SEGÍTSÉGET[#worship][#worship][#worship]
Cím: Re:Léptetőmotor
Írta: dcsaba Dátum 2011 február 27, 12:47
Írta: dcsaba Dátum 2011 február 27, 12:47
Kis apróság: nem olvastam még az induktív "visszalökésről" ami a motor induktivitásától, a rajta átfolyó áramtól, és a átfolyó áram "megszakításának" idejétől függ...
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2011 február 27, 15:18
Írta: 3k74cecek Dátum 2011 február 27, 15:18
Ez most kritika akar lenni valaki válaszára, vagy csak szeretnél olvasni erről is?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 február 27, 15:24
Írta: 000000000 Dátum 2011 február 27, 15:24
Ha a motorra 0.8A van ráírva , és a vezérlőn a minimum beállítás 1.4A van ráírva nem teszi tönkre a motort a túl nagy amper??[#conf]
Cím: Re:Léptetőmotor
Írta: designr Dátum 2011 február 27, 16:03
Írta: designr Dátum 2011 február 27, 16:03
Valószínűleg melegedni fog..Legjobb lenne a forgórész kihúzása nélkül,csak a pajzsot levéve megkeresni a tekercs közösítést,ha szerencséd van könnyű átkötni 8 vezetékesre..aztán hajthatod párhuzamos kötésben.erősebb is lessz,áram is megfelelő,..
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2011 február 27, 16:55
Írta: 3k74cecek Dátum 2011 február 27, 16:55
Biztosan melegedni fog, sőt le is éghet rövid idő alatt. Elvben jó lenne designr javaslata, de vigyázz, mert könnyű tönkretenni a a motort. Sajnos a vezérlőt és a motort egymáshoz kell választani, nem lehet akármelyik vezérlőre rákötni a motort.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2011 február 27, 17:20
Írta: 3k74cecek Dátum 2011 február 27, 17:20
Korrigálok. Utána néztem, és több dolog nem stimmel.
1. Az MSD40/3.2 vezérlő legkisebb csúcs árama a katalógus szerint 1A, ami 0.7 átlagnak felel meg.
2. a PK245-02A-C6 motor árama a katalógus szerint 0.57A nem 0.8A
Ezeket jó lenne tisztázni.
Amikor azt írod, hogy a " a motorra 0.8A van ráírva" akkor az ténylegesen a motorra van írva, vagy a Rabb Feri által adott katalógusban nézted a 245-02B sorában?
Ha szakaszosan, rövid időkre működteted (15-20sec működés utána ugyanennyi szünet) , és figyeled a melegedést, és 50foknál nem lesz melegebb 15-20 perc alatt, akkor jó. Ha több lesz akkor sajnos valamin változtatni kell.
1. Az MSD40/3.2 vezérlő legkisebb csúcs árama a katalógus szerint 1A, ami 0.7 átlagnak felel meg.
2. a PK245-02A-C6 motor árama a katalógus szerint 0.57A nem 0.8A
Ezeket jó lenne tisztázni.
Amikor azt írod, hogy a " a motorra 0.8A van ráírva" akkor az ténylegesen a motorra van írva, vagy a Rabb Feri által adott katalógusban nézted a 245-02B sorában?
Ha szakaszosan, rövid időkre működteted (15-20sec működés utána ugyanennyi szünet) , és figyeled a melegedést, és 50foknál nem lesz melegebb 15-20 perc alatt, akkor jó. Ha több lesz akkor sajnos valamin változtatni kell.
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2011 február 27, 17:32
Írta: Rabb Ferenc Dátum 2011 február 27, 17:32
A jelenlegi hat kivezetéses kötésben unipoláris módban 0,8A, soros bipolárisban 0,57A a katalógus szerint. Ha sikerül megtalálni a közös pontot, és átkötni párhuzamos bipolárisra, akkor lehet szerintem 1,14A a max fázisáram.
A típusszám végén az A és B csak azt jelenti, hogy egy vagy kétoldali tengelyvéges.
A típusszám végén az A és B csak azt jelenti, hogy egy vagy kétoldali tengelyvéges.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 február 27, 17:47
Írta: 000000000 Dátum 2011 február 27, 17:47
bocs pontosítok minden adatot felírtam PK245-02-C6 6V 0.8A A másik 4v 0.6a c6140-9012GM . A vezérlő MSD 40/3.2 A beállítás szerint OFF ON ON állasba 1.31A ír. Megpróbáltam és működik :)ERDÉLI72-től vettem egy "robotkart" vasárnapi játékra és a G-kód írogatásra...pár percet ment és kicsit éreztem hogy melegebb de nem erőltettem ... lehetséges valami ellenálással megoldani a túl nagy vezérlőt ( nem életbevágó csak játékra vettem) KÖSZÖNÖM MINDENKINEK A SEGÍTSÉGÉT.[#worship][#worship][#worship]
Cím: Re:Léptetőmotor
Írta: dcsaba Dátum 2011 február 27, 22:32
Írta: dcsaba Dátum 2011 február 27, 22:32
Semmiképp nem kritika akart lenni, csak illik figyelembe venni.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2011 február 28, 00:09
Írta: 3k74cecek Dátum 2011 február 28, 00:09
"A vezérlő MSD 40/3.2 A beállítás szerint OFF ON ON állasba 1.31A ír. "
Valóban, de egy sorral feljebb :ON ON ON állásban viszont 1A-t !!!!
Amíg 50 fok alatt van (kb. amíg meg tudod fogni és nem dobod el rögtön) addig nincs gond. Tulajdonképpen melegebb is lehetne, de azt már csak hőmérővel tudod ellenőrizni.
Ellenállással semmire sem mész, mert a vezérlő áramgenerátorosan dolgozik. Ha pedig akkora ellenállást teszel bele ami már tényleg korlátoz mert a tápfesz ugye adott, akkor meg lassú (gyenge) lesz, mert nem tud az áram elég gyorsan kialakulni.
Valóban, de egy sorral feljebb :ON ON ON állásban viszont 1A-t !!!!
Amíg 50 fok alatt van (kb. amíg meg tudod fogni és nem dobod el rögtön) addig nincs gond. Tulajdonképpen melegebb is lehetne, de azt már csak hőmérővel tudod ellenőrizni.
Ellenállással semmire sem mész, mert a vezérlő áramgenerátorosan dolgozik. Ha pedig akkora ellenállást teszel bele ami már tényleg korlátoz mert a tápfesz ugye adott, akkor meg lassú (gyenge) lesz, mert nem tud az áram elég gyorsan kialakulni.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2011 február 28, 00:14
Írta: 3k74cecek Dátum 2011 február 28, 00:14
Valóban illik, de evvel nem nekünk kell foglalkozni, hanem a vezérlő tervezőjének. Foglalkozik is vele, dióda formájában (ami lehet hogy a vezérlő FET-ben van) mert különben gyorsan kipurcanna vezérlő.
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2011 február 28, 00:39
Írta: 3k74cecek Dátum 2011 február 28, 00:39
Ennyire nem mélyedtem bele, csak az A sorát néztem, de most hogy írod, látom. Valóban ha átköti, akkor a vezérlőt állíthatja 1.6A csúcsáramra is, ami 1.16 átlagnak felel meg. Azon gondolkodom, hogy belül kell-e átkötnie, vagy elég összekötni a két végét? Arra hajlok, hogy elég összekötnie. Ugyanis a két féltekercs nem egy póluson van. Ettől mindössze annyi fog változni, hogy a lépések pozíciója fél lépéssel eltolódik, de ez senkit sem zavar. Igy nem kell szétszedni sem. Úgy rémlik, hogy ezt én régen próbáltam is, de mérget már nem vennék rá.
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2011 február 28, 07:49
Írta: Rabb Ferenc Dátum 2011 február 28, 07:49
Valóban "csak" fél lépéssel tolódik el a lépés, de szerintem ez nem jó megoldás, mert egymás ellen dolgozik a két tekercs, tehát nem azonos irányban. Így a nyomaték alaposan lecsökken.
Meg kell(ene) keresni a közösítést - ha lehet - és azonos gerjesztési irányokkal párhuzamosan kötni. De ehhez kicsit bele kellene nyúlni a motorba, ami nem mindig szokott utólag örömet okozni...
Isti! A trafós levelemet megkaptad? A régi címedre küldtem [#confused]
Meg kell(ene) keresni a közösítést - ha lehet - és azonos gerjesztési irányokkal párhuzamosan kötni. De ehhez kicsit bele kellene nyúlni a motorba, ami nem mindig szokott utólag örömet okozni...
Isti! A trafós levelemet megkaptad? A régi címedre küldtem [#confused]
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2011 február 28, 21:04
Írta: 3k74cecek Dátum 2011 február 28, 21:04
Tied a pont[#eljen][#worship].
Nulla lesz a nyomaték, mert a két tekercs azonos menetszámmal ugyanazokon a szegmenseken van csak az áramirány lesz ellentétes. Szóval a két mező pont kiüti egymást. Ennyire rosszul emlékezni [#falbav][#fejvakaras]
Nulla lesz a nyomaték, mert a két tekercs azonos menetszámmal ugyanazokon a szegmenseken van csak az áramirány lesz ellentétes. Szóval a két mező pont kiüti egymást. Ennyire rosszul emlékezni [#falbav][#fejvakaras]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 március 18, 17:20
Írta: 000000000 Dátum 2011 március 18, 17:20
Sziasztok! Mi a véleményetek erről a léptetőről?: Vexta 5,5V 1,34A 0,9° Szerintetek a vaterán kapható 3 tengelyes vezérlő jólenne hozzá? Mert ahhoz az van írva hogy 1,5-3 Amperig köthetők rá motorok, de ugye ez 1,34A. A másik hogy az alapfeszültsége nem magas? Szerintetek? Előre is köszönöm.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 március 18, 20:57
Írta: 000000000 Dátum 2011 március 18, 20:57
Sziasztok!
Én is gondolkodtam egy 6 kivezetéses moci "bipolárissá" tételén és ugyanarra a következtetésre jutottam mint Szigma barátunk. Másrészt, szerintem, ha belül sikerülne is átkötni a mocit nem biztos, hogy annak mágneses paraméterei megengednék a dupla terhelést. Azaz lehet, hogy a melóm kárba veszne...
Én is gondolkodtam egy 6 kivezetéses moci "bipolárissá" tételén és ugyanarra a következtetésre jutottam mint Szigma barátunk. Másrészt, szerintem, ha belül sikerülne is átkötni a mocit nem biztos, hogy annak mágneses paraméterei megengednék a dupla terhelést. Azaz lehet, hogy a melóm kárba veszne...
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2011 március 19, 13:24
Írta: Rabb Ferenc Dátum 2011 március 19, 13:24
Gabcsi54560-nak!
Igen, a kisebb ellenállásút kellene bekötni. De arra vigyázz, hogy mindkét tekercspárnál ugyanazt a fél tekercset használd.
A jó megoldás az lenne, ha a közös pontot megtalálnád, és a tényleges bipoláris motort "hoznád létre". Vagyis az alsó képen lévő tekercselrendezés és bekötés volna a nyerő.
Igen, a kisebb ellenállásút kellene bekötni. De arra vigyázz, hogy mindkét tekercspárnál ugyanazt a fél tekercset használd.
A jó megoldás az lenne, ha a közös pontot megtalálnád, és a tényleges bipoláris motort "hoznád létre". Vagyis az alsó képen lévő tekercselrendezés és bekötés volna a nyerő.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 március 19, 14:28
Írta: 000000000 Dátum 2011 március 19, 14:28
Szia,
ok megpróbápol első körben a kissebb ellenállású tekercspárt, mikorostepp üzemmódban lehet így használni?
Ha nem sikerül akkor majd szétszedem....
ok megpróbápol első körben a kissebb ellenállású tekercspárt, mikorostepp üzemmódban lehet így használni?
Ha nem sikerül akkor majd szétszedem....
Cím: Re:Léptetőmotor
Írta: 9ah5mpgwm Dátum 2011 március 20, 19:35
Írta: 9ah5mpgwm Dátum 2011 március 20, 19:35
Van nekem 3db régesrégi stepperem,az a bajom velük hohy hatalmas az induktiv feszültségük.17 voltos PWM-et próbáltam 20khz és vasszafale majd 100 voltokat lökdös,arra gondoltam hogy jóóóól át kéne tekercselni őket mert most 1-essel van tekerve jó sok menetszámmal de mondjuk ha 4es télalapalakú rézzel tekerem át vajon milyen lenne???vagy valami hasonlo vastaggal a lényeg a kevés menetszám lenne.Várom az észrevételeket ötleteket.A motorok 13cm átmérő 15cm hossz 12 es tengely most 30ohm 3mh nincs táblája sem típusa
Cím: Re:Léptetőmotor
Írta: 3k74cecek Dátum 2011 március 21, 23:17
Írta: 3k74cecek Dátum 2011 március 21, 23:17
Ha sikerül belül átkötni, akkor motorméret kérdése, hogy elérhető-e a dupla nyomaték. AÍ gond az, hogy akkor egyszerre két tekercsen folyhat az áram, tehát az elvileg dupla lehetne. Azonban ekkor a fejlődő hő is a duplája lenne, amit lehet hogy nem tud leadni a motor az eredeti feltételek között. Lehet hogy intenzív hűtést kellene csinálni hozzá, de ha ez sikerül, akkor a nyomaték is lehet közel a duplája.
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2011 március 24, 20:04
Írta: 35kpazcgr Dátum 2011 március 24, 20:04
Üdv.
Ma a helyi MÉH-telepen guberáltam 8 db léptetőmotort. Valami barbár szedhette ki nem is tudom, hogy miből. A csatlakozó dugókat letörte, a tengelyt meg simán levágta sarokcsiszolóval, a hosszának kb. a felénél. Gondolom, hogy a rajta levő alumínium bordásszíj kerék érdekelte csak. Kicsit megtisztogattam és megvizsgáltam őket. A 8-ból 6 talán menthető. A motorok 8 kivezetésűek, 6,35 és 10 mm-es tengellyel.
Pár kép róluk:


http://cnctar.hobbycnc.hu/tomahawk/L%e9ptet%f5%20motorok/PIC_0156-1.jpg
Szerintetek érdemes velük foglalkozni, vagy hagyjam a fenébe?
Ma a helyi MÉH-telepen guberáltam 8 db léptetőmotort. Valami barbár szedhette ki nem is tudom, hogy miből. A csatlakozó dugókat letörte, a tengelyt meg simán levágta sarokcsiszolóval, a hosszának kb. a felénél. Gondolom, hogy a rajta levő alumínium bordásszíj kerék érdekelte csak. Kicsit megtisztogattam és megvizsgáltam őket. A 8-ból 6 talán menthető. A motorok 8 kivezetésűek, 6,35 és 10 mm-es tengellyel.
Pár kép róluk:
http://cnctar.hobbycnc.hu/tomahawk/L%e9ptet%f5%20motorok/PIC_0156-1.jpg
Szerintetek érdemes velük foglalkozni, vagy hagyjam a fenébe?
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2011 március 24, 20:06
Írta: 35kpazcgr Dátum 2011 március 24, 20:06
A harmadik kép mégegyszer:

Cím: Re:Léptetőmotor
Írta: Kicsa Dátum 2011 március 24, 20:10
Írta: Kicsa Dátum 2011 március 24, 20:10
Vegyes érzelmek...egyrészt csorog a nyálam,másrészt elbeszélgetnék azzal aki ezt tette velük!
Ez szerintem olyan ~1.4 Nm körüliek lehetnek.
Egy próbát megér mert ha működnek,kevés ráfordítással jól használhatóvá tehetők szerintem.
Kérdés hogy ilyen munkával a tengely nem üt-e...
Ez szerintem olyan ~1.4 Nm körüliek lehetnek.
Egy próbát megér mert ha működnek,kevés ráfordítással jól használhatóvá tehetők szerintem.
Kérdés hogy ilyen munkával a tengely nem üt-e...
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2011 március 24, 20:19
Írta: 35kpazcgr Dátum 2011 március 24, 20:19
Úgy néz ki, a tengelyek nem ütnek. Az összes tekercs ép, zárlat, szakadás nincs. A tengelyek könnyen forognak. Próbaképpen az egyik tekercshez tartozó vezetékeket rövidre zártam. Így sokkal nehezebben forgatható. Ezt mind a 8 tekercsnél végigjátszottam, hasonló volt az eredmény.
Cím: Re:Léptetőmotor
Írta: Kicsa Dátum 2011 március 24, 20:19
Írta: Kicsa Dátum 2011 március 24, 20:19
És halkan megkérdezném : Van már terved a kettő darab nem menthető motorral?
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2011 március 24, 20:32
Írta: 35kpazcgr Dátum 2011 március 24, 20:32
Mit tudnál velük csinálni?
Ezek nem forognak, az egyiknek be van horpadva az oldala, a másik kívülről épnek látszik. Ezek más típusúak, de a méretük egyezik:


Ezek nem forognak, az egyiknek be van horpadva az oldala, a másik kívülről épnek látszik. Ezek más típusúak, de a méretük egyezik:
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2011 március 24, 20:38
Írta: 35kpazcgr Dátum 2011 március 24, 20:38
Ezután sűrűbben meglátogatom ezt a MÉH-telepet.
A tulaj szerint várható hasonló szállítmány később is.
A tulaj szerint várható hasonló szállítmány később is.
Cím: Re:Léptetőmotor
Írta: Kicsa Dátum 2011 március 24, 20:49
Írta: Kicsa Dátum 2011 március 24, 20:49
Hát egyet szétkapnék darabokra : egyrészt hogy lássan hogy milyen belülről egy léptetőmotor,másrészt pedig lenne néhány jó képem a Diplomamunkához.
A másikat pedig megpróbálnám életre kelteni,ha sikerülne akkor Z motor lenne belőle. Ha nem,akkor szintén tanulmány... [#bee1]
A másikat pedig megpróbálnám életre kelteni,ha sikerülne akkor Z motor lenne belőle. Ha nem,akkor szintén tanulmány... [#bee1]
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2011 március 24, 20:56
Írta: 35kpazcgr Dátum 2011 március 24, 20:56
Megegyezhetünk!
[#vigyor2]
[#vigyor2]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 március 24, 21:05
Írta: 000000000 Dátum 2011 március 24, 21:05
Na közben egy idióta blogger is rátalállt a forumra.
A vágott tengelyes léptetőmotorokkal nekem volak problémáim. Úgy vettem 4 motrot hogy kettőnek eredetileg hosszabb tengelye volt és a tulaj úgy gondolta 4 egyforma motor többet ér. Nem súrolnak, ugyanúgy vagy majdnem ugyanúgy forognak, de a mintha sérült volna a mag nem mindig mennek tökéletesen főleg nagyobb sebességnél kis terhelésnél van lépésvesztes.
A vágott tengelyes léptetőmotorokkal nekem volak problémáim. Úgy vettem 4 motrot hogy kettőnek eredetileg hosszabb tengelye volt és a tulaj úgy gondolta 4 egyforma motor többet ér. Nem súrolnak, ugyanúgy vagy majdnem ugyanúgy forognak, de a mintha sérült volna a mag nem mindig mennek tökéletesen főleg nagyobb sebességnél kis terhelésnél van lépésvesztes.
Cím: Re:Léptetőmotor
Írta: Kicsa Dátum 2011 március 24, 21:10
Írta: Kicsa Dátum 2011 március 24, 21:10
Ha szétszedés nélkül vágták le,mi történhetett belül? Esetleg a vágás során keletkező hő miatt lehetett ilyen hibajelenség?
tomahawk! Írtam levelet!
tomahawk! Írtam levelet!
Cím: Re:Léptetőmotor
Írta: 35kpazcgr Dátum 2011 március 24, 21:14
Írta: 35kpazcgr Dátum 2011 március 24, 21:14
Válasz ment!
Cím: Re:Léptetőmotor
Írta: neduddgi Dátum 2011 június 28, 11:16
Írta: neduddgi Dátum 2011 június 28, 11:16
Sziasztok!
Túrtam egy ilyen léptető motort. Az érdekessége (számomra), hogy az orsó "átmegy" a motoron.
Alapból 4 vezetékes a motor, de egybe van építve a vezérlőjével. Az lenne a kérdésem, hogy a mellékelt képen látható csatlakozó jelölései mennyire szabványosak? Tehát egy sima LPT kártyával hajtható lenne?
Elméleti jellegű a kérdés, semmi megoldandó feladat nincs mögötte, csak tájékozódnék.
(Legrosszabb esetben a vezérlő kuka és marad egy sima 4 vezetékes motor.)
Túrtam egy ilyen léptető motort. Az érdekessége (számomra), hogy az orsó "átmegy" a motoron.
Alapból 4 vezetékes a motor, de egybe van építve a vezérlőjével. Az lenne a kérdésem, hogy a mellékelt képen látható csatlakozó jelölései mennyire szabványosak? Tehát egy sima LPT kártyával hajtható lenne?
Elméleti jellegű a kérdés, semmi megoldandó feladat nincs mögötte, csak tájékozódnék.
(Legrosszabb esetben a vezérlő kuka és marad egy sima 4 vezetékes motor.)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2011 június 28, 11:19
Írta: s7manbs8 Dátum 2011 június 28, 11:19
Kép lemaradt. :)
Cím: Re:Léptetőmotor
Írta: neduddgi Dátum 2011 június 28, 11:21
Írta: neduddgi Dátum 2011 június 28, 11:21
P...ába! :-)

Íme.
Íme.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2011 június 28, 11:23
Írta: s7manbs8 Dátum 2011 június 28, 11:23
Úgy látom van ezen Step Dir Enable bemenet, plusz programozáűshoz SPI felületű csatlakozás, jó kis cucc lehet. Az IN lehet talán a Step jel.
Cím: Re:Léptetőmotor
Írta: neduddgi Dátum 2011 június 28, 11:35
Írta: neduddgi Dátum 2011 június 28, 11:35
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2011 augusztus 11, 10:25
Írta: ht0cjk58i Dátum 2011 augusztus 11, 10:25
A léptecs motorokat meglehet csinálni enkoderesre mint a szervókat?Milyen vezérlő tudná kezelni a léptecseket és az enkodert is?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 augusztus 11, 10:37
Írta: 000000000 Dátum 2011 augusztus 11, 10:37
vissza csatolásban gondolkodsz?
elvileg a mach3 ezt tudná elméletben gyakorlatban is de betegesen csak mind meg bizhatoságra több tengelynél egyszere!
ha párhuzamos porton akarod meg oldani külön port kell mert elfogynak a bemenetek de az ilyen nagy számolásos feladatokat jobb egy külsö hadwere rábizni ahogy a szervo vezérléseken is van azok gyorsabban feldolgozák ezt a sok sok inpulzust!:)
Talán még az EMC2 lehetne probálkozni szoftveresen is.....
elvileg a mach3 ezt tudná elméletben gyakorlatban is de betegesen csak mind meg bizhatoságra több tengelynél egyszere!
ha párhuzamos porton akarod meg oldani külön port kell mert elfogynak a bemenetek de az ilyen nagy számolásos feladatokat jobb egy külsö hadwere rábizni ahogy a szervo vezérléseken is van azok gyorsabban feldolgozák ezt a sok sok inpulzust!:)
Talán még az EMC2 lehetne probálkozni szoftveresen is.....
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2011 augusztus 11, 10:41
Írta: ht0cjk58i Dátum 2011 augusztus 11, 10:41
Persze hardweresre gondoltam én is.A Mach3 tudom hogy kezelni tudná,csak érdemes-e foglalkozni a témával.Kicsit olcsóbb mint a szervó,pláne ha meglévő gépet szeretnék átalakítani.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 augusztus 11, 10:54
Írta: 000000000 Dátum 2011 augusztus 11, 10:54
dc szervo?
az kb egyáron van a léptecsel motor+vezérlö!
az kb egyáron van a léptecsel motor+vezérlö!
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2011 augusztus 11, 11:29
Írta: Egyújabbgépépítő Dátum 2011 augusztus 11, 11:29
Ha jól tudom a MACH csak kijelzi az encoder-t, nem tud visszacsatolást.
DYNOMOTION K-FLOP tud encodert léptetővel használni.
DYNOMOTION K-FLOP tud encodert léptetővel használni.
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2011 augusztus 16, 22:25
Írta: xkbv3nx0d Dátum 2011 augusztus 16, 22:25
Olyannal találkozott már valaki, hogy léptecs két tengelyvéggel rendelkezik, és a hátsó egy "lendkerék" jellegű mutatvány van! Ez miért jó, rossz vagy ilyesmi? Van értelme tömeggel lendekereket csinálni, vagy esetleg inkább rázkódáscsillapotás?
Cím: Re:Léptetőmotor
Írta: 4um5b65d Dátum 2011 augusztus 16, 22:26
Írta: 4um5b65d Dátum 2011 augusztus 16, 22:26
Síma a palástfelülete a lendkeréknek?
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2011 augusztus 16, 22:27
Írta: xkbv3nx0d Dátum 2011 augusztus 16, 22:27
Cím: Re:Léptetőmotor
Írta: 4um5b65d Dátum 2011 augusztus 16, 22:29
Írta: 4um5b65d Dátum 2011 augusztus 16, 22:29
Hajthatsz vele fémszalagot, mint a régi floppiknál volt.
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2011 augusztus 16, 22:33
Írta: Rabb Ferenc Dátum 2011 augusztus 16, 22:33
Valami funkciója biztosan volt, ha már rátették. De ha CNC-hez akarod használni, feltétlen távolítsd el.
Hasonló "lendkerekes" léptetőim vannak nekem is. Amikor leoperáltam a nagy tehetetlen tömeget, a sebességet duplájára, a gyorsulást háromszorosára tudtam növelni lépésvesztés nélkül
Hasonló "lendkerekes" léptetőim vannak nekem is. Amikor leoperáltam a nagy tehetetlen tömeget, a sebességet duplájára, a gyorsulást háromszorosára tudtam növelni lépésvesztés nélkül
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2011 augusztus 16, 22:35
Írta: PSoft Dátum 2011 augusztus 16, 22:35
Általában fazék,harang forma,síma palást felülettel,és a belseje ki van könnyítve,pont a lendkerékhatás csökkentésére.
Egész egyszerűen,kézikeréknek szokták használni.:)
Egész egyszerűen,kézikeréknek szokták használni.:)
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2011 augusztus 16, 22:40
Írta: xkbv3nx0d Dátum 2011 augusztus 16, 22:40
kézikeréknek nem hiszem (arra valami értelmesebb forma kell), inkább valami émszalagos hajtás a reális... amúgy nem akarom megvenni csak véletlen találtal és érdekes lett... mert egyszer olvastam valahol, hogy gumiból szoktak rá rakni, hogy a rezgéseket csillapítsa!
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2011 augusztus 16, 22:59
Írta: PSoft Dátum 2011 augusztus 16, 22:59
Ahogy írtam,abban a formában szokták kézikeréknek is használni.

A képaláírás:
"Kézi magasságállításhoz szorítóhüvelyes dumper."
Például ezen a konstrukción is láthatod.
A képaláírás:
"Kézi magasságállításhoz szorítóhüvelyes dumper."
Például ezen a konstrukción is láthatod.
Cím: Re:Léptetőmotor
Írta: 4um5b65d Dátum 2011 augusztus 16, 23:03
Írta: 4um5b65d Dátum 2011 augusztus 16, 23:03
A palástján nincs furat ?
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2011 augusztus 16, 23:05
Írta: xkbv3nx0d Dátum 2011 augusztus 16, 23:05
Úgy igen de ennek ha megnézed a képet tök más formája van
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2011 augusztus 16, 23:05
Írta: xkbv3nx0d Dátum 2011 augusztus 16, 23:05
passzolom én is csak azt a képet láttam
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2011 augusztus 16, 23:16
Írta: PSoft Dátum 2011 augusztus 16, 23:16
B@sszus,a vaterás link,csak az alapkérdés után kettővel jött.
Azt meg én nem is néztem.:))
Azt meg én nem is néztem.:))
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2011 augusztus 18, 08:00
Írta: xkbv3nx0d Dátum 2011 augusztus 18, 08:00
Na újabb amatőr kérdés....
Mi a jelentősége egy 8 vezetékes motornál ha sorosan vagy párhuzamosan kötöm? Azt tudom, hogy a fesz a duplája az áram meg fele az egyik illetve másik megoldásnál, de a gyakorlati hatása milyen lesz?
Egyáltalán egy kb 3Nm motort milyen feszről érdemes/illik hajtani (van vagy 42voltom, meg vagy 8 amperem egyenlőre) de 4 motort kéne ebből tekergetni (2X, Y és Z)
Mi a jelentősége egy 8 vezetékes motornál ha sorosan vagy párhuzamosan kötöm? Azt tudom, hogy a fesz a duplája az áram meg fele az egyik illetve másik megoldásnál, de a gyakorlati hatása milyen lesz?
Egyáltalán egy kb 3Nm motort milyen feszről érdemes/illik hajtani (van vagy 42voltom, meg vagy 8 amperem egyenlőre) de 4 motort kéne ebből tekergetni (2X, Y és Z)
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2011 augusztus 18, 08:28
Írta: D.Laci Dátum 2011 augusztus 18, 08:28
Nem szimpla lendkerék. Attól bonyolultabb szerkezet az, rezonancia csökentése véget van rajta.
Cím: Re:Léptetőmotor
Írta: xfg6v697j Dátum 2011 augusztus 18, 11:20
Írta: xfg6v697j Dátum 2011 augusztus 18, 11:20
Valahol olvastam hogy befolyásplja a makszimális fordulaszámot is.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 augusztus 22, 17:50
Írta: 000000000 Dátum 2011 augusztus 22, 17:50
Sziasztok
Tud valaki infót erről a motorokról?
23LM-C218-03V
23LM-C218-04V
23KM-K722-02V
23KM-K722-03V
Feszültség,áram,nyomaték.
Tud valaki infót erről a motorokról?
23LM-C218-03V
23LM-C218-04V
23KM-K722-02V
23KM-K722-03V
Feszültség,áram,nyomaték.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2011 augusztus 23, 08:16
Írta: besirkyjh Dátum 2011 augusztus 23, 08:16
Szia
Gondolom körül néztél a netten ?
Ha nincs más akkor mérd ki , nem kel csak egy volt amper mérö egy szabályozhato táp ( 0 és max 10V 2-5A között ) és esetleg egy höfok mérö ( kezdésnek ) ezekkel szépen meg lehet állapitani a müködéséhez szükséges paramétereket ) .
Ha tovább olasol még azt is meg találod hogy hogyan lehet a tartonyomatákot meg állapitani .
Gondolom körül néztél a netten ?
Ha nincs más akkor mérd ki , nem kel csak egy volt amper mérö egy szabályozhato táp ( 0 és max 10V 2-5A között ) és esetleg egy höfok mérö ( kezdésnek ) ezekkel szépen meg lehet állapitani a müködéséhez szükséges paramétereket ) .
Ha tovább olasol még azt is meg találod hogy hogyan lehet a tartonyomatákot meg állapitani .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 augusztus 23, 17:49
Írta: 000000000 Dátum 2011 augusztus 23, 17:49
Szia.
Körülnéztem a neten. A MINEBEA CO katalógus letöltöttem de pont ez a két motor nincs benne.
A motorok még nincsenek nálam, most szeretném megvenni.Műszereim természetesen vannak, minden féle.Csak szeretnék többet tudni a motorról mielőtt megvenném.
Körülnéztem a neten. A MINEBEA CO katalógus letöltöttem de pont ez a két motor nincs benne.
A motorok még nincsenek nálam, most szeretném megvenni.Műszereim természetesen vannak, minden féle.Csak szeretnék többet tudni a motorról mielőtt megvenném.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2011 augusztus 23, 18:55
Írta: besirkyjh Dátum 2011 augusztus 23, 18:55
Körülnéztem én is de semmi jelentös .
Mivel Te is horgászol elárulok egy titkot .
Ha nincs a cnc tchikában gyakorlatod akkor inkább ne vedd meg azt a léptetöt csak ha majdnem ingyen van .
Nem lehet kölcsön kérni mig kiméred ?
A fizikai méretei is elárulnak valamit de az állapotukat nem .
Mennyiért lenne darabja ? ( ha nem titok ) hátha nem is olyan olcso az .
Mivel Te is horgászol elárulok egy titkot .
Ha nincs a cnc tchikában gyakorlatod akkor inkább ne vedd meg azt a léptetöt csak ha majdnem ingyen van .
Nem lehet kölcsön kérni mig kiméred ?
A fizikai méretei is elárulnak valamit de az állapotukat nem .
Mennyiért lenne darabja ? ( ha nem titok ) hátha nem is olyan olcso az .
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2011 augusztus 23, 18:57
Írta: s7manbs8 Dátum 2011 augusztus 23, 18:57
Van olyan vásárlásnál, hogy próba is nem ? Úgy kell megvenni, hogy ha jó neked marad, ha nem vissza.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2011 augusztus 23, 19:10
Írta: besirkyjh Dátum 2011 augusztus 23, 19:10
Oszt hogy :))
Mert az elado majd rászereli a 100mm-es erökart meg a kolás üveget ?
Jobban jár ha innen vesz olyat amit ismerünk is .
Most volt egy csomo nemrég .
Mert az elado majd rászereli a 100mm-es erökart meg a kolás üveget ?
Jobban jár ha innen vesz olyat amit ismerünk is .
Most volt egy csomo nemrég .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 augusztus 23, 19:16
Írta: 000000000 Dátum 2011 augusztus 23, 19:16
Szia.
Küldtem mailt az árakról.
Meg vagy 200km-re lenne a helyszín.
Küldtem mailt az árakról.
Meg vagy 200km-re lenne a helyszín.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2011 augusztus 23, 21:05
Írta: besirkyjh Dátum 2011 augusztus 23, 21:05
Ok
Már tisztul a dolog .
Akkor hozzám közel van ?! :))
Már tisztul a dolog .
Akkor hozzám közel van ?! :))
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 07:43
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 07:43
Sziasztok.
Motorkábelnek mit ajánlotok? 3.1Nm motor aszem a max árama 4.1A 8 vezetékes (párhuzamosan akarnám kötni 4 madzagra) elvileg UTP-re gondoltam (strukturált, árnyékolt, 0.5mm vezetékekkel)
Motorkábelnek mit ajánlotok? 3.1Nm motor aszem a max árama 4.1A 8 vezetékes (párhuzamosan akarnám kötni 4 madzagra) elvileg UTP-re gondoltam (strukturált, árnyékolt, 0.5mm vezetékekkel)
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2011 augusztus 25, 08:04
Írta: besirkyjh Dátum 2011 augusztus 25, 08:04
Szia
Használd a jol bevált Liycy 4 x 0,5 vagy ha nagy a mozgás és hosszu a vezeték ( több mint 3m ) akkor a 4x0,75 sem tulzás ( Klavio KFT , T2cnc ) .
Szerintem 2.8A lesz az a 3.1Nm-es léptetö .
Vezérlöd milyen hozzá ?
Használd a jol bevált Liycy 4 x 0,5 vagy ha nagy a mozgás és hosszu a vezeték ( több mint 3m ) akkor a 4x0,75 sem tulzás ( Klavio KFT , T2cnc ) .
Szerintem 2.8A lesz az a 3.1Nm-es léptetö .
Vezérlöd milyen hozzá ?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2011 augusztus 25, 08:07
Írta: besirkyjh Dátum 2011 augusztus 25, 08:07
Ja bocs , az UTP-vel az a baj hogy nem körben árnyékolt és csak az ér valamit ami harisnya szerü árnyékolással készül ( ilyen a Liycy ).
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 08:08
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 08:08
Klaviós mSD70/4.2
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 08:08
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 08:08
Ok, kilőve az UTP akkor, mert abból van itthon vagy 50000m, de intézek akkor harisnyásat
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 08:10
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 08:10
motor meg ilyen
NEMA23 (60mm) 2 fázisú léptetőmotor, 1.8 fok, 3.1Nm nyomaték
Tekercsadatok:
Áram:4.2A
Ellenállás:0.65Ohm
Feszültség:2.73V
Induktivitás:3.2mH
Kivezetések száma: 8
Tengelyvég:6.35+8mm
Súly:1.4kg
Hossz:86mm
Garancia: 12
Szerviz: Klavio Kft.
NEMA23 (60mm) 2 fázisú léptetőmotor, 1.8 fok, 3.1Nm nyomaték
Tekercsadatok:
Áram:4.2A
Ellenállás:0.65Ohm
Feszültség:2.73V
Induktivitás:3.2mH
Kivezetések száma: 8
Tengelyvég:6.35+8mm
Súly:1.4kg
Hossz:86mm
Garancia: 12
Szerviz: Klavio Kft.
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 08:38
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 08:38
ja és az asztal 2200mm hosszú, így akkor 0.75-ös vagy inkább legyen 1mm a vezeték?
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 08:43
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 08:43
és akkor még egy kérdés, csatlakozónak ki mit használ és mit ajánl?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 augusztus 25, 09:02
Írta: 000000000 Dátum 2011 augusztus 25, 09:02
A 0.75.ös jó lesz. Én lemezes sorkapcsot használok, ha nem kell ki-be húzgálni.
Érvéghüvely ajánlott!
A Klaviónál kapsz kábelt!
Milyen orsók fogják mozgatni ezt a hatalmas gépet?
Elég lesz a 3.1Nm?
Érvéghüvely ajánlott!
A Klaviónál kapsz kábelt!
Milyen orsók fogják mozgatni ezt a hatalmas gépet?
Elég lesz a 3.1Nm?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2011 augusztus 25, 09:04
Írta: besirkyjh Dátum 2011 augusztus 25, 09:04
Az MSD 70-4.2 karcsu lesz ( melegedni fog az állando max kivezérléstöl .Kényszerhütés vagy csere 5.6A-ra .
Olyan sok variácio nincs mert az MSD-n sorkapocs van és a vezeték másik végén is ekkora keresztmetsetben ajánlott de érvég hüvellyel ( ha jol irom ) .Az 1-es talán tulzás kicsit .Utoljára ekkora gépben kb 40m 0.75 huztam be 4 léptetöhöz elég volt :)
Olyan sok variácio nincs mert az MSD-n sorkapocs van és a vezeték másik végén is ekkora keresztmetsetben ajánlott de érvég hüvellyel ( ha jol irom ) .Az 1-es talán tulzás kicsit .Utoljára ekkora gépben kb 40m 0.75 huztam be 4 léptetöhöz elég volt :)
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 09:14
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 09:14
nem orsó, fogasléc, szíjas áttétellel, ez nekünk bevált anno kisebb motorral is. Nekünk nem szükség a százados pontosság, de abba sem volt nagy hiba, amire kellett tökéletes volt, csak térben volt kicsi.
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 09:14
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 09:14
dupla venti hűti őket a dobozban, meglátjuk, ha nem lesz elég cseréljük
Cím: Re:Léptetőmotor
Írta: v2vhwz32z Dátum 2011 augusztus 25, 09:15
Írta: v2vhwz32z Dátum 2011 augusztus 25, 09:15
Bocs, hogy beleszólok, de miért nem kérsz az épülő gépednek egy topikot? Biztosan sokan meríthetnének az ötleteidből!
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 09:15
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 09:15
x tengely 2x3.1nm 3:1 szíjas áttételen keresztül hajt
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 09:17
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 09:17
arra sajna nem mindig lenne időm frissítgetni, én amúgy is csak tákolok, amolyan költséghatékony módokon, ilyenek még véletlenül sem ismerek, hogy hiwin, isel sinek, kocsik, meg drága aluprofilok... nekem csak csapágyak vannak meg acél szerkezet:)
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2011 augusztus 25, 09:23
Írta: besirkyjh Dátum 2011 augusztus 25, 09:23
Elég lesz az csak tegyél áttételt legalább 6:1-hez .
2250 x 1100 x 140mm munkaterületünél 1,5 modulos fogasléccel 2 x 1.7Nm az "Y" on 1db 3.1Nm az "X"en és 1db 3.1Nm a "Z" tengelyen és vidáman rohangál 10 000mm/min sebességgel pozicionálni .Ha az X hidad nehéz akkor az indulás és a megállás miatt ajánlott a nagyobb léptetö vagy a nagyobb áttétel .Ja és MSD-50-4.2 vel 4db természetesen .
2250 x 1100 x 140mm munkaterületünél 1,5 modulos fogasléccel 2 x 1.7Nm az "Y" on 1db 3.1Nm az "X"en és 1db 3.1Nm a "Z" tengelyen és vidáman rohangál 10 000mm/min sebességgel pozicionálni .Ha az X hidad nehéz akkor az indulás és a megállás miatt ajánlott a nagyobb léptetö vagy a nagyobb áttétel .Ja és MSD-50-4.2 vel 4db természetesen .
Cím: Re:Léptetőmotor
Írta: v2vhwz32z Dátum 2011 augusztus 25, 09:28
Írta: v2vhwz32z Dátum 2011 augusztus 25, 09:28
Én is hasonló elképzelésekkel kezdtem, már ezért is kíváncsiak lennék mit lehet kihozni belőle. Rövidebb távon működhet, de aztán a csapágyak "berágják" az acélt is (azt hiszem D.Laci ezt megerősítené).
De Kulcsár Zoli is csinált hasonló gépet, kisebb méretben. Meg persze sokan mások..
De Kulcsár Zoli is csinált hasonló gépet, kisebb méretben. Meg persze sokan mások..
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 09:33
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 09:33
Ami most van az az x tengely 2db 3.1nm 3:1 áttétel, 1-1db az y és z tengely 3.1nm... z tengely orsós a többi fogasleces. msd-70 4.2 vezérlőim vannak persze 4db. Híd súlya kb 45kg lesz. méretek 2200mm x 1580mm x 200mm
Acélnak c45-ös koszörült sineket használunk, szerintem egyenlőre megteszi ( a sima lapos hidegen húzott acél is évekig bírta)
Acélnak c45-ös koszörült sineket használunk, szerintem egyenlőre megteszi ( a sima lapos hidegen húzott acél is évekig bírta)
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2011 augusztus 25, 09:40
Írta: PSoft Dátum 2011 augusztus 25, 09:40
A "lemezes sorkapocs" az a csavar nélküli,rugós szoríású?
Cím: Re:Léptetőmotor
Írta: v2vhwz32z Dátum 2011 augusztus 25, 09:43
Írta: v2vhwz32z Dátum 2011 augusztus 25, 09:43
Közben nekem is ez jutott eszembe, hogy a csapágyak alá futófelületnek jó lenne a c45-ös köszörült acéltengely.Egyre inkább kíváncsi lennék a gépedre, ha egy nagyobb munkaterületű gépet építenék később, jó lenne mintának. Szerintem kérj egy topikot aztán időnként dobsz bele képeket..
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 09:52
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 09:52
Hát legyen.... csak nem tudom kitől kérjem! De kérnék egy topicot az épülő masinámnak
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 09:53
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 09:53
cseamolyan univerzális gépnek készül... maró és plazma (habár utóbbinak nincsenek nagy mechanikai igénybevételei) próbáltuk egy kicsit a maró irányába vinni mert az jó lesz a plazmához is!
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2011 augusztus 25, 10:38
Írta: besirkyjh Dátum 2011 augusztus 25, 10:38
Szia
Igen készültek kisebb gépek csapágyakkal de a nagyobbakat kizárolag ISEL sinekkel csinálom és görgösre !
Igen készültek kisebb gépek csapágyakkal de a nagyobbakat kizárolag ISEL sinekkel csinálom és görgösre !
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2011 augusztus 25, 10:42
Írta: besirkyjh Dátum 2011 augusztus 25, 10:42
Kevés lessz a 3:1 mert ha dinamikus mozgást szeretnél akkor a párhuzamos tengeylyek miatt egyszerüen tul szalad az X hidad .Valami olyasmi áttételt csinálj hogy a fogaskerék egy köre ne legyen több mint 60 - 70mm és ez kb 150 - 200f/min forduljon a léptetö max fordulatán .
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 11:03
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 11:03
ó nekem ezek túl bonyolultak... azt tudom, hogy a régebbi gépünkön is ezt a módszert használtuk és jó volt...
itt egy videó róla
azt tudom, hogy a motor tengelyén a fogazott szíjtárcsa 24 fogas, a hajtó tengelyen 72 fogas és az van párositva egy 20 fogas 1.5modulos fogaskerékkel
itt egy videó róla
azt tudom, hogy a motor tengelyén a fogazott szíjtárcsa 24 fogas, a hajtó tengelyen 72 fogas és az van párositva egy 20 fogas 1.5modulos fogaskerékkel
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 12:10
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 12:10
az érvéghüvely rendben, meg a 0.75-ös keresztmetszet, sikerült LI-YCY kávelt is szereznem... a csatlakozóra arra gondoltam, hogy a dobozom oldalára kivezetni, hogy a motorok is bármikor oldható kábellel legyenek ellátva... csak a sima DB9-es (com portos) csatit túl szimplának találom... de lehet az lesz a jó megoldást, vagy ha tudtok valami jobbat ami esetleg "iparibb"
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 augusztus 25, 12:33
Írta: 000000000 Dátum 2011 augusztus 25, 12:33
Használhatsz, mikrofon csatlakozókat is.
Az ajzatban van retesz is, kiesés ellen.
Cím: Re:Léptetőmotor
Írta: x4rhew5r3 Dátum 2011 augusztus 25, 12:44
Írta: x4rhew5r3 Dátum 2011 augusztus 25, 12:44
Páldául Lomex-nél 5p mikrofon csatlakozó.
43-16-92 Dugó
43-16-96 Aljzat
43-16-92 Dugó
43-16-96 Aljzat
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2011 augusztus 25, 15:07
Írta: besirkyjh Dátum 2011 augusztus 25, 15:07
Ha tényleg lesz vagy 45 kilo a hidad akkor egy egy irányváltásnál de inkább megállásnál a tömege a tehetetlensége miatt tul tugyja lökni a pozicion a szánt .Lehet nincs ekkora jelentösége de ha ilyennel találkozol akkor tudd be ennek .
Tehát : a léptetöd kb 7-800 fordulatot tud majd ezt osztjuk az áttételel és igy járunk 233 és 266 fogaskerék fordulat körül a 1.5 modulos 20 fogas kereked kb 70mm-t tesz meg 1 fordulatára igy a géped pozicionálo sebessége kb 16310 és 18620mm/min körül lesz , ekkora sebességgel dinamikusan nem tudsz meg állitani egy 45 kilos hidat .Ha viszont a sebességböl eröt csinálsz ( nagyobb áttételel ) akkor az eröböl jut böven a dinamikára .
Probáld ki : a gyorsitási rámpádat vedd 5 - 600-as értékre és járasd a géped és utánna vedd mondjuk 5 -6000-es értékre egyböl meglátszik miröl beszélek . Igazábol ennek akkor van jelentösége a minden tengely viszonylag sokat dolgozik ( pl : apro és sok a munkadarab vagy relief készitésénél ) .
A Mach3-ban szimulálj le egy 30 - 40 000soros programot a két rámpa értékkel és rájössz a jelentöségére ( idöbeli )
Többek között a Vbodi is ezért kérdezte hogy eléglesz-e a léptetöd nyomatéka mert már Ö is dinamikában és nemm kizárolag sebességben gondolkodik .( hatékonyság ) .
Csatlakozo : mindegy hogy hogyan oldod meg de csak jominöségü csatlakozoval szerelj mert selejt lesz a vége ( saját tapasztalat az olcso kinai mikrofon csatival ).
Jo lessz az , hajrá !
[#eljen]
Tehát : a léptetöd kb 7-800 fordulatot tud majd ezt osztjuk az áttételel és igy járunk 233 és 266 fogaskerék fordulat körül a 1.5 modulos 20 fogas kereked kb 70mm-t tesz meg 1 fordulatára igy a géped pozicionálo sebessége kb 16310 és 18620mm/min körül lesz , ekkora sebességgel dinamikusan nem tudsz meg állitani egy 45 kilos hidat .Ha viszont a sebességböl eröt csinálsz ( nagyobb áttételel ) akkor az eröböl jut böven a dinamikára .
Probáld ki : a gyorsitási rámpádat vedd 5 - 600-as értékre és járasd a géped és utánna vedd mondjuk 5 -6000-es értékre egyböl meglátszik miröl beszélek . Igazábol ennek akkor van jelentösége a minden tengely viszonylag sokat dolgozik ( pl : apro és sok a munkadarab vagy relief készitésénél ) .
A Mach3-ban szimulálj le egy 30 - 40 000soros programot a két rámpa értékkel és rájössz a jelentöségére ( idöbeli )
Többek között a Vbodi is ezért kérdezte hogy eléglesz-e a léptetöd nyomatéka mert már Ö is dinamikában és nemm kizárolag sebességben gondolkodik .( hatékonyság ) .
Csatlakozo : mindegy hogy hogyan oldod meg de csak jominöségü csatlakozoval szerelj mert selejt lesz a vége ( saját tapasztalat az olcso kinai mikrofon csatival ).
Jo lessz az , hajrá !
[#eljen]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 augusztus 25, 15:47
Írta: 000000000 Dátum 2011 augusztus 25, 15:47
"1.5 modulos 20 fogas kereked kb 70mm-t tesz meg"
Azért ez így túl laza kerekítés...
Ugyanis: 1.5*20*3.141=94.23
Tehát legördüléskor a fogaslécen 1 fordulatnál
~94.2 mm az elmozdulás.
Aztán még sok más laza megfogalmazás is van az írásodban, pl.:
- "..sebességböl eröt csinálsz.." Ez nagy művészet, ha szószerint vesszük.
- "..nem tudsz meg állitani egy 45 kilos hidat.." Először talán induljunk el.
Egyébként értem én, hogy mit szeretnél, de az egésznek az alapja a motor tengelyére redukált optimális J, azaz áttétel optimum számítás lenne.
Ugyanis a fogaskerék-fogasléces hajtásra is létezik optimális áttétel, mint az orsó-anya mozgatású hajtásoknál.
Azaz a nulladik kérdés: mekkora a motor J-je?
Erről egy szót sem esett idáig.:(
Azért ez így túl laza kerekítés...
Ugyanis: 1.5*20*3.141=94.23
Tehát legördüléskor a fogaslécen 1 fordulatnál
~94.2 mm az elmozdulás.
Aztán még sok más laza megfogalmazás is van az írásodban, pl.:
- "..sebességböl eröt csinálsz.." Ez nagy művészet, ha szószerint vesszük.
- "..nem tudsz meg állitani egy 45 kilos hidat.." Először talán induljunk el.
Egyébként értem én, hogy mit szeretnél, de az egésznek az alapja a motor tengelyére redukált optimális J, azaz áttétel optimum számítás lenne.
Ugyanis a fogaskerék-fogasléces hajtásra is létezik optimális áttétel, mint az orsó-anya mozgatású hajtásoknál.
Azaz a nulladik kérdés: mekkora a motor J-je?
Erről egy szót sem esett idáig.:(
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2011 augusztus 25, 15:56
Írta: besirkyjh Dátum 2011 augusztus 25, 15:56
Szia Tiborom
Hát persze hogy érted , direkt irtam hogy kb de durvára sikerült .
Elinditani vagy megállitani nehezebb a 45kg-ot ?
Hogy telt eddig a nyarad ? :)
Hát persze hogy érted , direkt irtam hogy kb de durvára sikerült .
Elinditani vagy megállitani nehezebb a 45kg-ot ?
Hogy telt eddig a nyarad ? :)
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2011 augusztus 25, 16:03
Írta: Miki2 Dátum 2011 augusztus 25, 16:03
A fogaskerék-fogasléc hajtásnak van még egy gyenge pontja.
Ha pontos metrikus méreteket szeretnél megvalósítani, feltétlenül kell a rendszerbe egy 157-es fogszámú fogaskereket építeni.
Ha pontos metrikus méreteket szeretnél megvalósítani, feltétlenül kell a rendszerbe egy 157-es fogszámú fogaskereket építeni.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2011 augusztus 25, 16:06
Írta: besirkyjh Dátum 2011 augusztus 25, 16:06
Szia Miki
Ne bonyolitsd a dolgot :))
Csak sejtem mire gondolsz :(
Ne bonyolitsd a dolgot :))
Csak sejtem mire gondolsz :(
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 augusztus 25, 16:12
Írta: 000000000 Dátum 2011 augusztus 25, 16:12
Ha el tudod indítani, a megállítással sem lesz gondod. Egyébként elindítani nehezebb valamit, tehát ezzel érdemes kezdeni a vizsgálatot, hiszen van súrlódás is.
Remekül telik, tudod magasra állítottam már a sületlenség figyelő komparátort, így könnyű és vidám az élet. De most éppen Te sem fázol az augusztusi kánikulában, tehát csakis vidáman élvezheted a nyarat ...:)
Remekül telik, tudod magasra állítottam már a sületlenség figyelő komparátort, így könnyű és vidám az élet. De most éppen Te sem fázol az augusztusi kánikulában, tehát csakis vidáman élvezheted a nyarat ...:)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 augusztus 25, 16:22
Írta: 000000000 Dátum 2011 augusztus 25, 16:22
Ezt én nem hinném....
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2011 augusztus 25, 18:22
Írta: Miki2 Dátum 2011 augusztus 25, 18:22
Pedig ez így van.
50*3.14=157
Ez a 3.14 szorzói közül a legkisebb egész számú szorzat.
Hagyományos gépeken is ezt alkalmazzák metrikus vezérorsó esetén modul menet vágásánál.
Ez a fogszám a colos menet esetében a 127.
Tudom, ez CNC. itt sok mindent lehet állítani.
Lépésszámot akár 4 számjegyű pontossággal, a vezérlő felbontását, stb.
Ezek együtt ki kell tegyék ezt az "áttételt", különben egy hosszabb gép esetében a hibák halmozódnak.
Gondolom, mivel ez a téma szóba került, ez nem egy pici gép lesz.
50*3.14=157
Ez a 3.14 szorzói közül a legkisebb egész számú szorzat.
Hagyományos gépeken is ezt alkalmazzák metrikus vezérorsó esetén modul menet vágásánál.
Ez a fogszám a colos menet esetében a 127.
Tudom, ez CNC. itt sok mindent lehet állítani.
Lépésszámot akár 4 számjegyű pontossággal, a vezérlő felbontását, stb.
Ezek együtt ki kell tegyék ezt az "áttételt", különben egy hosszabb gép esetében a hibák halmozódnak.
Gondolom, mivel ez a téma szóba került, ez nem egy pici gép lesz.
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2011 augusztus 25, 18:29
Írta: Miki2 Dátum 2011 augusztus 25, 18:29
Szándékosan nem a PI-t írtam.
Tudom, hogy végtelen tört.
Tudom, hogy végtelen tört.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 augusztus 25, 19:06
Írta: 000000000 Dátum 2011 augusztus 25, 19:06
Látod most cáfoltad meg az eredeti állításodat. Hiszen a 157 nem egyenlő pi*50-el.
Akkor meg teljesen felesleges, sőt hibanövelő tényező. A CNC gépnek nem gond 16 ... 32 jegyű pontosággal kiszámítani valamit. Utána pedig ha jó az interpolátor algoritmusa a vezérlőnek, mindig csak +- felbontás/2 lesz a legnagyobb elvi eltérés maximális értéke. Ezért aztán annyira nem érdemes törekedni pl. "kerek" 0.01 mm-es felbontásra, pl. egy 0.009876 mm felbontású géppel jobban közelíted az analóg világot, mint a "kerek" társával.
A hagyományos gépeknél valóban kellenek ilyen cserekerek bizonyos esetekben (jó sokszor számolgattam ilyeneket is), de itt is csak sajnos közelítő megoldást ad, és ott nincs más lehetőség, csak a mechanikus áttétel.
Akkor meg teljesen felesleges, sőt hibanövelő tényező. A CNC gépnek nem gond 16 ... 32 jegyű pontosággal kiszámítani valamit. Utána pedig ha jó az interpolátor algoritmusa a vezérlőnek, mindig csak +- felbontás/2 lesz a legnagyobb elvi eltérés maximális értéke. Ezért aztán annyira nem érdemes törekedni pl. "kerek" 0.01 mm-es felbontásra, pl. egy 0.009876 mm felbontású géppel jobban közelíted az analóg világot, mint a "kerek" társával.
A hagyományos gépeknél valóban kellenek ilyen cserekerek bizonyos esetekben (jó sokszor számolgattam ilyeneket is), de itt is csak sajnos közelítő megoldást ad, és ott nincs más lehetőség, csak a mechanikus áttétel.
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2011 augusztus 25, 19:23
Írta: Miki2 Dátum 2011 augusztus 25, 19:23
Ezért írtam, amit olvashattál.
Balga módon azt gondoltam,hogy egyszer talán másnak is igaza lehet.
Azt gondoltam, a leírtakból kiderült, hogy mindegy milyen módon mechanikusan, vagy elektromosan, ezt az áttételt bele kell vinni a rendszerbe.
Balga módon azt gondoltam,hogy egyszer talán másnak is igaza lehet.
Azt gondoltam, a leírtakból kiderült, hogy mindegy milyen módon mechanikusan, vagy elektromosan, ezt az áttételt bele kell vinni a rendszerbe.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 augusztus 25, 19:36
Írta: 000000000 Dátum 2011 augusztus 25, 19:36
Egy a lényeg: CNC-nél ez a "157-es gondolatot" a #3027-ben nem volt helyes, sikerült tisztázni.
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 21:14
Írta: xkbv3nx0d Dátum 2011 augusztus 25, 21:14
húhú ez már tényleg sok, ilyen pi meg olyan fogszám... mindegy nekem csak menjen:)
viccet félretéve minden tanácsot meghallgatok, de roppant konok is vagyok és a költségkeret sem túl tágas, úgyhogy egyenlőre az olcsóbb, aztán ha lesz zsé akkor legfeljebb cserélgetünk alkatrészt, meg ha már tudunk magunknak gyártani ezt azt amazt akkor lehet könnyebb lesz géppel, mint most kis flexxel...
viccet félretéve minden tanácsot meghallgatok, de roppant konok is vagyok és a költségkeret sem túl tágas, úgyhogy egyenlőre az olcsóbb, aztán ha lesz zsé akkor legfeljebb cserélgetünk alkatrészt, meg ha már tudunk magunknak gyártani ezt azt amazt akkor lehet könnyebb lesz géppel, mint most kis flexxel...
Cím: Re:Léptetőmotor
Írta: wcsxp0uxa Dátum 2011 augusztus 26, 06:56
Írta: wcsxp0uxa Dátum 2011 augusztus 26, 06:56
Annyit hozzátennék az "interpolátor elvi tévedés" részéhez ,hogy ez csak a polált tengelyre igaz.(és ezt is lehet kozmetikázni) Az a tengely amihez képest elvégezzük a műveletet ,az mindig pontos lesz (számítástechnikailag).
Cím: Re:Léptetőmotor
Írta: wcsxp0uxa Dátum 2011 augusztus 31, 07:06
Írta: wcsxp0uxa Dátum 2011 augusztus 31, 07:06
Mivel ez egy szakmai fórum ,kicsit csiszolom a szakmai önérzetemet . Ebbe az indoklásba butaság volt belekeverni az interpolációt . Itt csupán adatbeviteli ,illetve mechanikai pontatlanságok vannak .Már csak azért is mert az interpolációnál a pontatlanságot a két tengely elmozdulásának az aránya határozza meg , az alul meghatározott maximális értékben. Ebben az esetben a lépésszámmal egyenesen aránylik a tévedés mértéke ,illetve 1 db tengely van csupán .
Cím: Re:Léptetőmotor
Írta: xr54ua7n2 Dátum 2011 szeptember 04, 11:28
Írta: xr54ua7n2 Dátum 2011 szeptember 04, 11:28
Segítséget kérnék, ha valaki felismeri ezen léptetőmotorokat és van adatlapja ,akkor ossza meg velem. Előre is köszönöm!

Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2011 szeptember 04, 12:11
Írta: besirkyjh Dátum 2011 szeptember 04, 12:11
Szia
Na még egyszer .
Ha máshogy nem megy ird le hogy mik vannak ráirva és hogy hány vezeték jön ki belöle és milyenek a méretei .Esetleg honnan , miböl származik ?
Na még egyszer .
Ha máshogy nem megy ird le hogy mik vannak ráirva és hogy hány vezeték jön ki belöle és milyenek a méretei .Esetleg honnan , miböl származik ?
Cím: Re:Léptetőmotor
Írta: VViktor Dátum 2011 szeptember 04, 12:16
Írta: VViktor Dátum 2011 szeptember 04, 12:16
http://kepfeltoltes.hu/view/110904/20030602l_ptet__001_www.kepfeltoltes.hu_.jpg
Ezt akarta belinkelni jheim
Ezt akarta belinkelni jheim
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2011 szeptember 04, 15:28
Írta: besirkyjh Dátum 2011 szeptember 04, 15:28
Szia
Sajnos nekem ez sem segitett , nem ismerem igy öket .
Ha más nincs marad a mérés !
Sajnos nekem ez sem segitett , nem ismerem igy öket .
Ha más nincs marad a mérés !
Cím: Re:Léptetőmotor
Írta: xr54ua7n2 Dátum 2011 szeptember 04, 20:37
Írta: xr54ua7n2 Dátum 2011 szeptember 04, 20:37
Köszönöm a fáradozást.
Miért nem sikerült a linkelés? Használtam a kép funkciót.
Miért nem sikerült a linkelés? Használtam a kép funkciót.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2011 szeptember 04, 20:41
Írta: s7manbs8 Dátum 2011 szeptember 04, 20:41
Azért, mert nem a kép url címét tetted bele, hanem a képet is magában foglaló weboldal címét, úgy kell belinkelni onnan, hogy rámész arra a képre, jobb gomb megjelenítés, majd a megjelenített kép címét teszed be az url cím helyére, persze olyan méretű képet tegyél fel oda, hogy 80x600 astól ne legyen nagyobb.
Cím: Re:Léptetőmotor
Írta: xr54ua7n2 Dátum 2011 szeptember 05, 08:05
Írta: xr54ua7n2 Dátum 2011 szeptember 05, 08:05
Remélem most jó.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2011 szeptember 05, 08:22
Írta: besirkyjh Dátum 2011 szeptember 05, 08:22
Szia
Tul sokat nem mond igy sem .
Az látszik rajta hogy 6 vezetékes valoszinü , igy használhatod unipoláris és bipoláris vezérlökhöz is .A többi csak találgatás lenne .
Megint irom : ha más nincs ki kel mérni .
Mire szeretnéd használni ( gondolom valami gravirozot szeretnél épiteni belölük .Mekkorát ? ) .
Tul sokat nem mond igy sem .
Az látszik rajta hogy 6 vezetékes valoszinü , igy használhatod unipoláris és bipoláris vezérlökhöz is .A többi csak találgatás lenne .
Megint irom : ha más nincs ki kel mérni .
Mire szeretnéd használni ( gondolom valami gravirozot szeretnél épiteni belölük .Mekkorát ? ) .
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2011 szeptember 05, 10:23
Írta: s7manbs8 Dátum 2011 szeptember 05, 10:23
Oldalról, elölről nincs kép róla, nekem van ilyesmi motorom, azt hiszem egy, alakra ilyen és ekkora, az olyan 1.5A, 4.5V körüli, talán 0.8-1Nm-es lehet.
Cím: Re:Léptetőmotor
Írta: cx79vmdj5 Dátum 2011 november 18, 10:05
Írta: cx79vmdj5 Dátum 2011 november 18, 10:05
Sziasztok!
Elektron segitségét szeretném kérni, mert már segített a témában, de hátha más is járt már ilyen cipőben. Az sla7026 alapján épitettem vezérlőt, ami rángatott, azt a javaslatot kaptam, hogy féllépésben, mikrolépésben hajtsam. Megépitettem a féllépés verziót ttlből és cmosból, sőt piccel is, és az eddigi 160hzes rángatás mellé bejött egy 320hz körüli rángatás, terhelve természetesen jó. Vettem egy sla7062ot, amit ugyanezzel a motorral, ugyanezzel a paraméterekkel hajtva nem rángat(féllépés, lecsengés, motoráram, motor ugyanaz). Ez mitől lehet? Az igazsághoz az is hozzátartozik, hogy ttlből épitve csak morog a motor, cmosból meg piccel ellépi magát akkora a rezonancia. Ezt mi okozza? A cmosokat szükséges hidegiteni, mert ugy tudom az kevésbé érzékeny a zavarokra? A cmost és a picet hidegitettem, a ttlt nem. Próbáltam a fet dead timeal játszani, de csak a max fordulatra lett hatással, és a motorjárás egyenletességére.
Elektron segitségét szeretném kérni, mert már segített a témában, de hátha más is járt már ilyen cipőben. Az sla7026 alapján épitettem vezérlőt, ami rángatott, azt a javaslatot kaptam, hogy féllépésben, mikrolépésben hajtsam. Megépitettem a féllépés verziót ttlből és cmosból, sőt piccel is, és az eddigi 160hzes rángatás mellé bejött egy 320hz körüli rángatás, terhelve természetesen jó. Vettem egy sla7062ot, amit ugyanezzel a motorral, ugyanezzel a paraméterekkel hajtva nem rángat(féllépés, lecsengés, motoráram, motor ugyanaz). Ez mitől lehet? Az igazsághoz az is hozzátartozik, hogy ttlből épitve csak morog a motor, cmosból meg piccel ellépi magát akkora a rezonancia. Ezt mi okozza? A cmosokat szükséges hidegiteni, mert ugy tudom az kevésbé érzékeny a zavarokra? A cmost és a picet hidegitettem, a ttlt nem. Próbáltam a fet dead timeal játszani, de csak a max fordulatra lett hatással, és a motorjárás egyenletességére.
Cím: Re:Léptetőmotor
Írta: pisti73 Dátum 2011 november 19, 19:22
Írta: pisti73 Dátum 2011 november 19, 19:22
Sziasztok!
Olyan kérdésem lenne, ha a Mach3 motor tuning menüben a sebességet magasra állítom akkor léptetőmotorom tengelye nem csinál semmit (áll egy helyben) viszont a belsejében mintha nagy sebességgel forogna valami. Ez természetes működése a motornak? (Ja mindezt terhelés alatt csinálja)
Olyan kérdésem lenne, ha a Mach3 motor tuning menüben a sebességet magasra állítom akkor léptetőmotorom tengelye nem csinál semmit (áll egy helyben) viszont a belsejében mintha nagy sebességgel forogna valami. Ez természetes működése a motornak? (Ja mindezt terhelés alatt csinálja)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 november 19, 19:27
Írta: 000000000 Dátum 2011 november 19, 19:27
Túlhajtva ezt csinálják. Vedd vissza a sebességet és a gyorsítás rámpát is állítsd be!
Cím: Re:Léptetőmotor
Írta: pisti73 Dátum 2011 november 19, 19:58
Írta: pisti73 Dátum 2011 november 19, 19:58
Köszi, akkor megnyugodtam. Amikor ezt tapasztaltam egyből visszaállítottam mindent, most megy rendesen.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2011 november 19, 20:13
Írta: s7manbs8 Dátum 2011 november 19, 20:13
Most az egész cmos vagy ttl logika step dir jelet kap és azt alakítja át a ic megfelelő kombinációira ? TTL IC nek is tegyél a Táplábához közel kondit, meg a GND legyen elég vastag vagy felület, de egyébként nem teljesen értem a kérdést valahogy.
Cím: Re:Léptetőmotor
Írta: cx79vmdj5 Dátum 2011 november 20, 20:05
Írta: cx79vmdj5 Dátum 2011 november 20, 20:05
Igen, a step dirt megkapja egy logikai áramkör, és kiadja az icnek a megfelelő kombinációt. Több ilyen logikai áramkört csináltam, csak ttlből is és csak cmosból is épitettem. A cmos bizonyos frekin ellép, a ttl viszont nem hibázik(igaz némely frekvencián erősebb a motor hangja, de nem lép el). A két kapcsolás közt a különbség az, hogy a cmost hidegitettem(és még igy se jó) a ttlt nem(és mégis jó). A kérdés az, hogy a cmos miért működik rosszul(pedig zavarvédettebb a magasabb kapcsolási szint és a hidegitőkondi miatt), és mit tehetek, hogy jól működjön? A föld nagy felület a kis induktivitás végett, digit táp, és motortáp más trafóról jön. Másik kérdés: az lehetséges, hogy a motorrezonancia okoz egy pozitiv visszacsatolást az elektronika felé?
Cím: Re:Léptetőmotor
Írta: cx79vmdj5 Dátum 2011 november 20, 20:09
Írta: cx79vmdj5 Dátum 2011 november 20, 20:09
Egy harmadik kérdés is felmerült bennem, a cmos hidegítése okozhatja-e a problémát? Előre is köszönöm a segitséget.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 november 26, 09:15
Írta: 000000000 Dátum 2011 november 26, 09:15
Mekkora lehet egy bipoláris (négy vezetékes) léptecs nyomatéka álló helyzetben vagy alacsony fordulaton, ha adatai 3,6 V/fázis és 1,1A/fázis 1,8 fok/lépés?
Mi a helyzet egy másik motornál, ami 8 vezetékes, tehát bárhogy beköthető, 5,17 V, 1,63A, 1,8fok?
köszönöm előre is: Balázs
Mi a helyzet egy másik motornál, ami 8 vezetékes, tehát bárhogy beköthető, 5,17 V, 1,63A, 1,8fok?
köszönöm előre is: Balázs
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 november 26, 09:24
Írta: 000000000 Dátum 2011 november 26, 09:24
Belülülről.

Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2011 november 26, 13:02
Írta: besirkyjh Dátum 2011 november 26, 13:02
Szia
Ezt igy nehéz meg mondani mert függ pl: a motor korátol is ( mennyire mágnes az a mágnes ? ).
Ki kel mérni ( manuálisan ) .
Egy sima táprol adj rá a névleges feszültséget és mérj tatronyomatékot ugy hogy a motor tengelyére rögzitel egy pontosan 100mm-es erökart és oda akasztol egy 2L kolás üveget amit töltesz vizzel egész addig mid a létetö el nem engedi a tartásbol ( lezuhan ) utánna leméred az üveged sulyát és az a suly lesz a tartonyomatékod Nm-ben .Nem kel léptetni nem kel semmi csak egy táp amit be lehet állitani a léptetö feszültségére !
Ezt igy nehéz meg mondani mert függ pl: a motor korátol is ( mennyire mágnes az a mágnes ? ).
Ki kel mérni ( manuálisan ) .
Egy sima táprol adj rá a névleges feszültséget és mérj tatronyomatékot ugy hogy a motor tengelyére rögzitel egy pontosan 100mm-es erökart és oda akasztol egy 2L kolás üveget amit töltesz vizzel egész addig mid a létetö el nem engedi a tartásbol ( lezuhan ) utánna leméred az üveged sulyát és az a suly lesz a tartonyomatékod Nm-ben .Nem kel léptetni nem kel semmi csak egy táp amit be lehet állitani a léptetö feszültségére !
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 november 28, 05:55
Írta: 000000000 Dátum 2011 november 28, 05:55
Köszönöm, kipróbálom.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 november 30, 18:45
Írta: 000000000 Dátum 2011 november 30, 18:45
Szevasztok!
Tudom, hogy már az előttem felszólalók is kifejtették hogy sok mindentől függ egy léptető nyomatéka ám mégis megkérdezném hogy van e valami ökölszabály a motor feszültsége és áramerőssége között? Gondolok itt olyanra hogy egy magasabb feszültségű és alacsonyabb áramigényű motor vagy egy alacsonyabb feszültségű és nagyobb áramú motor milyen tulajdonságokban tér el melyik megfelelőbb pl (hobby)cnc hez? Ahogy látom a modern léptetők inkább alacsonyabb feszültséget és nagyobb áramot kívánnak, ami bonyolultabb vezérlőt jelent mert több ampert kell szolgáltasson a motoroknak. Gondolom nem véletlen ez. Nagyobb dinamikát, vagy gyorsaságot vagy erőt biztosít ez a motornak? Világosítsatok fel legyetek szívesek.
Tudom, hogy már az előttem felszólalók is kifejtették hogy sok mindentől függ egy léptető nyomatéka ám mégis megkérdezném hogy van e valami ökölszabály a motor feszültsége és áramerőssége között? Gondolok itt olyanra hogy egy magasabb feszültségű és alacsonyabb áramigényű motor vagy egy alacsonyabb feszültségű és nagyobb áramú motor milyen tulajdonságokban tér el melyik megfelelőbb pl (hobby)cnc hez? Ahogy látom a modern léptetők inkább alacsonyabb feszültséget és nagyobb áramot kívánnak, ami bonyolultabb vezérlőt jelent mert több ampert kell szolgáltasson a motoroknak. Gondolom nem véletlen ez. Nagyobb dinamikát, vagy gyorsaságot vagy erőt biztosít ez a motornak? Világosítsatok fel legyetek szívesek.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2011 november 30, 19:52
Írta: svejk Dátum 2011 november 30, 19:52
A motor nyomatéka akár állóhelyzetbe vagy menet közben a kialakuló mágneses mező és a forgórész permanens mágnesének kölcsönhatásából alakul ki.
Adott mágneses erősségű forgórész mellett az állórész mágneses mezejének erősségével lehet játszani, ez a tekercsre jutó áramerősség és a tekercs menetszámának a szorzata, ez az un. "Ampermenet" mértékegység. Ma már ritkán használatos kifejezés.
Álló helyzetben az Ohm törvénye alapján a motor árama és a tekercs ellenállása alapján számolható a tekercsre kapcsolható feszültség.
Léptetőmotornál akkor tudjuk a legnagyobb nyomatékot kivenni ha ezt a megadott áramerősséget minden körülmények közt megpróbáljuk tartani. A fordulatszám növekedésével az ellenelektromotoros erő miatt állandó tápfeszültség mellett egyre kevesebb áramot venne fel a motorunk, ezért menet közben a tápfeszültséget növelni kell.
Ezt tehetjük PWM szabályzással, vagy nagyon régen az volt a módi, hogy a tekerccsel egy ohmos ellenállás volt kapcsolva a rendszer pedig a motor névleges feszültségének többszöröséről járt.
Ha motor helyből magas tápfeszültségű akkor léptetéseknél a Lenze törvény értelmében csak lassan tud kialakulni, vagy kikapcsoláskor összeomlani a mágneses mező, ezért a ezek a nagy feszültségű motorok nem alkalmasak nagyobb fordulatszámokra, illetve nagyobb fordulaton túl magas tápfeszültség kellene, mely szigetelési problémákat is felvethet.
A mai modern gyors motorok ezért nagy áramúak és ezzel együtt alacsony feszültségűek, tehát ilyeneket keress.
Ez volt a konyhanyelvi megfogalmazás, a ráérő tudós fórumtársak majd kijavítanak ha nem jól írtam valamit.
Adott mágneses erősségű forgórész mellett az állórész mágneses mezejének erősségével lehet játszani, ez a tekercsre jutó áramerősség és a tekercs menetszámának a szorzata, ez az un. "Ampermenet" mértékegység. Ma már ritkán használatos kifejezés.
Álló helyzetben az Ohm törvénye alapján a motor árama és a tekercs ellenállása alapján számolható a tekercsre kapcsolható feszültség.
Léptetőmotornál akkor tudjuk a legnagyobb nyomatékot kivenni ha ezt a megadott áramerősséget minden körülmények közt megpróbáljuk tartani. A fordulatszám növekedésével az ellenelektromotoros erő miatt állandó tápfeszültség mellett egyre kevesebb áramot venne fel a motorunk, ezért menet közben a tápfeszültséget növelni kell.
Ezt tehetjük PWM szabályzással, vagy nagyon régen az volt a módi, hogy a tekerccsel egy ohmos ellenállás volt kapcsolva a rendszer pedig a motor névleges feszültségének többszöröséről járt.
Ha motor helyből magas tápfeszültségű akkor léptetéseknél a Lenze törvény értelmében csak lassan tud kialakulni, vagy kikapcsoláskor összeomlani a mágneses mező, ezért a ezek a nagy feszültségű motorok nem alkalmasak nagyobb fordulatszámokra, illetve nagyobb fordulaton túl magas tápfeszültség kellene, mely szigetelési problémákat is felvethet.
A mai modern gyors motorok ezért nagy áramúak és ezzel együtt alacsony feszültségűek, tehát ilyeneket keress.
Ez volt a konyhanyelvi megfogalmazás, a ráérő tudós fórumtársak majd kijavítanak ha nem jól írtam valamit.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2011 november 30, 19:58
Írta: besirkyjh Dátum 2011 november 30, 19:58
Szia
Ökölszabály ? Talán az hogy a léptetöket érdemes kb 50 fok környékén járatni ( hö fok ) .
Ez meg tudod keresni minden léptetönél feszültséggel ( 15 - 20 perc tarto áram és ha a höfok nem megy e fölé akkor az jo lesz ugy ) .
A többi a #3057 ben .
Amelyiket könnyebben be tudod szerezni olcson az a jo ( de azért 200 lépés legyen egy kör ) .
Régi léptetöhöz régi vezérlö ( pl L298 - SLA ) ujabb léptetökhöz ujabb vezérlö ( TB6560 - MSD stb ) .
Ökölszabály ? Talán az hogy a léptetöket érdemes kb 50 fok környékén járatni ( hö fok ) .
Ez meg tudod keresni minden léptetönél feszültséggel ( 15 - 20 perc tarto áram és ha a höfok nem megy e fölé akkor az jo lesz ugy ) .
A többi a #3057 ben .
Amelyiket könnyebben be tudod szerezni olcson az a jo ( de azért 200 lépés legyen egy kör ) .
Régi léptetöhöz régi vezérlö ( pl L298 - SLA ) ujabb léptetökhöz ujabb vezérlö ( TB6560 - MSD stb ) .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2011 november 30, 22:13
Írta: 000000000 Dátum 2011 november 30, 22:13
Köszönöm a felvilágítást!
Cím: Re:Léptetőmotor
Írta: dcsaba Dátum 2011 december 02, 16:15
Írta: dcsaba Dátum 2011 december 02, 16:15
Konyhanyelv mi? [#vigyor2]
Legalább lehet tanulni abból amit írsz.
Annyit vettem észre az alacsony feszültségű motoroknál, hogy minél alacsonyabb feszültségű egy motor, annál jobban közelít a belső ellenállása a nullához, ez pedig még PWM üzemben is próbára teszi a kapcsolóelemeket. (saját tapasztalat: TB6560 elvileg elég erős végfokkal rendelkezik, mégis megynyúvad egy pár voltos motortól, mégha 1,5A-rel is vezérled.)
Legalább lehet tanulni abból amit írsz.
Annyit vettem észre az alacsony feszültségű motoroknál, hogy minél alacsonyabb feszültségű egy motor, annál jobban közelít a belső ellenállása a nullához, ez pedig még PWM üzemben is próbára teszi a kapcsolóelemeket. (saját tapasztalat: TB6560 elvileg elég erős végfokkal rendelkezik, mégis megynyúvad egy pár voltos motortól, mégha 1,5A-rel is vezérled.)
Cím: Re:Léptetőmotor
Írta: fviifv5hs Dátum 2011 december 02, 17:05
Írta: fviifv5hs Dátum 2011 december 02, 17:05
Sziasztok!
Keresem azt a kiállítót akitől vettem becsületkasszás üzletmenetben 2 db AX 050081A 1,5A léptetőmotort.
A tesztgéphez még 2 db kellene ugyanilyen, lehetőleg bordás kerékkel.
Meg egyebek.
A büfével szemben a csarnok belsejében a fordulónál volt az asztala (+két fő).
Az szomszédja kézi kereket árult.
Keresem azt a kiállítót akitől vettem becsületkasszás üzletmenetben 2 db AX 050081A 1,5A léptetőmotort.
A tesztgéphez még 2 db kellene ugyanilyen, lehetőleg bordás kerékkel.
Meg egyebek.
A büfével szemben a csarnok belsejében a fordulónál volt az asztala (+két fő).
Az szomszédja kézi kereket árult.
Cím: Re:Léptetőmotor
Írta: cx79vmdj5 Dátum 2012 január 07, 17:04
Írta: cx79vmdj5 Dátum 2012 január 07, 17:04
Sziasztok!
Azt szeretném kérdezni, hogy a léptetőmotoroknál a rezonanciafrekvencia, illetve az ott jelentkező ellépés akkor is jelentkezik, ha dc módba a névleges áramról és névleges feszültségről jár?
Azt szeretném kérdezni, hogy a léptetőmotoroknál a rezonanciafrekvencia, illetve az ott jelentkező ellépés akkor is jelentkezik, ha dc módba a névleges áramról és névleges feszültségről jár?
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 január 07, 17:07
Írta: keri Dátum 2012 január 07, 17:07
DC módban nem.
DC áram hatására a léptető motor egy helyben fog állni és melegedni.
De ha arra gondolsz hogy névleges értékekkel hajtva elugrik e, akkor a válaszom igen.
De csak akkor ha aláméretezted a motort és a hajtás sebességét, vagy rosszul méretezted a mechanikát.
Ha megmondod mi a probléma szerintem jobban tudunk segíteni.
DC áram hatására a léptető motor egy helyben fog állni és melegedni.
De ha arra gondolsz hogy névleges értékekkel hajtva elugrik e, akkor a válaszom igen.
De csak akkor ha aláméretezted a motort és a hajtás sebességét, vagy rosszul méretezted a mechanikát.
Ha megmondod mi a probléma szerintem jobban tudunk segíteni.
Cím: Re:Léptetőmotor
Írta: cx79vmdj5 Dátum 2012 január 07, 18:30
Írta: cx79vmdj5 Dátum 2012 január 07, 18:30
Az a gondom, hogy ellép a vezérlőm, de nem tudom mi okozza, és miért...Sok mindent nem tudok mérni műszerezettség nélkül, igy kisérletezem, és megpróbálom összerakni a kockákat, hátha...
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 január 07, 18:51
Írta: keri Dátum 2012 január 07, 18:51
Közben látom az elektronika topikban, hogy nem a mechanikus rezonanciára gondolsz.
Úgy lép el hogy nem vezérled?
Akkor a jel vezeték összeszed valami zavart.
Földhurok is lehet, vagy rossz árnyékolás. A bemenetre tegyél egy RC szűrést. Kondinak hasraütésre 10 20 nanoF körül, meg 1kOhm ellenállást.
Mondjuk nekem nincs semmi az IC bemenetén, közvetlenül az LPT portra volt kötve. Ha lehúztam a kábelt az LPT portról akkor mozgott magától össze vissza, de amúgy nem.
Illetve egyszer nekem is csinált ilyeneket, a motor vezetéke túl közel ment a printerkábelhez.
Úgy lép el hogy nem vezérled?
Akkor a jel vezeték összeszed valami zavart.
Földhurok is lehet, vagy rossz árnyékolás. A bemenetre tegyél egy RC szűrést. Kondinak hasraütésre 10 20 nanoF körül, meg 1kOhm ellenállást.
Mondjuk nekem nincs semmi az IC bemenetén, közvetlenül az LPT portra volt kötve. Ha lehúztam a kábelt az LPT portról akkor mozgott magától össze vissza, de amúgy nem.
Illetve egyszer nekem is csinált ilyeneket, a motor vezetéke túl közel ment a printerkábelhez.
Cím: Re:Léptetőmotor
Írta: cx79vmdj5 Dátum 2012 január 07, 19:40
Írta: cx79vmdj5 Dátum 2012 január 07, 19:40
A spiráltesztnél nem áll vissza az induló pozicióba.
Kipróbáltam, ha lehúzom a printer kábelt, úgy is áll egy helyben. Árnyékolt a kábel, és optoval leválasztott a vezérlő bemenete. A printer kábel a digitális résszel együtt a nyák másik felén van, a motor résztől kb. 20cmre, a kábelek is más oldalon futnak és a nyáktól csak távolodnak egymástól. A 10-20nano az 1kos ellenállás taggal 10-20u idoallandot ad, azaz 0,69szeresét, az elég hosszú idő, ha pl. a mach3-ban nagy kernelsebességet szeretnék.
Kipróbáltam, ha lehúzom a printer kábelt, úgy is áll egy helyben. Árnyékolt a kábel, és optoval leválasztott a vezérlő bemenete. A printer kábel a digitális résszel együtt a nyák másik felén van, a motor résztől kb. 20cmre, a kábelek is más oldalon futnak és a nyáktól csak távolodnak egymástól. A 10-20nano az 1kos ellenállás taggal 10-20u idoallandot ad, azaz 0,69szeresét, az elég hosszú idő, ha pl. a mach3-ban nagy kernelsebességet szeretnék.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 január 07, 20:26
Írta: keri Dátum 2012 január 07, 20:26
Jónak hangzik.
MACH egyenletesen adja a jelet?
Az energiatakarékos üzemmódok bezavarhatnak neki.
Ki kéne próbálni azt a spiráltesztet, DOS alól futtatott programmal is. Volt ilyen gondom is, amikor DOS alól működött rendesen, gyorsan, win alól meg tévesztett. Igaz ott csak nagyobb sebességeken, alacsonyabbon ott sem volt probléma.
MACH egyenletesen adja a jelet?
Az energiatakarékos üzemmódok bezavarhatnak neki.
Ki kéne próbálni azt a spiráltesztet, DOS alól futtatott programmal is. Volt ilyen gondom is, amikor DOS alól működött rendesen, gyorsan, win alól meg tévesztett. Igaz ott csak nagyobb sebességeken, alacsonyabbon ott sem volt probléma.
Cím: Re:Léptetőmotor
Írta: cx79vmdj5 Dátum 2012 január 07, 20:38
Írta: cx79vmdj5 Dátum 2012 január 07, 20:38
Próbáltam, van egy laptopom, amin turbocnc megy. Sot vettem egy gyari ic-t is, ami jo...
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 január 07, 20:48
Írta: keri Dátum 2012 január 07, 20:48
Hát akkor tényleg nem ártana egy tárolós szkóp a továbblépéshez.
Cím: Re:Léptetőmotor
Írta: cx79vmdj5 Dátum 2012 január 08, 09:10
Írta: cx79vmdj5 Dátum 2012 január 08, 09:10
Te milyen vezérlőt épitettél? Az enyém unipoláris és egész jól csúcssebességben üresen 26000Hz-ig hajtja a motort 24V-os táppal(35V-on jártam már 40kHznél is), ha jól hegyezem ki, akkor el sem lép. Lehet esetleg ilyen szkópot bérelni valahol Monor környékén? Az segit a mechanikus rezonanciák csökkentésében, ha a féllépést úgy használom, hogy 1tekercs 100%motoráram, 2tekercs 70%-70%motoráram? Az a baj, hogy nem tudom mechanikus hiba vagy elektromos.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 január 08, 09:49
Írta: keri Dátum 2012 január 08, 09:49
Ha mechanikus, akkor sebesség függő, sebesség csökkentésével előbb utóbb tuti megszűnne.
Én bipolárisat építettem 4 FET-es híddal.
12V nem tudom mekkora áram, de elég kicsi nyomtató motorokat hajtottam. Az áramot a motor melegedéshez állítottam, pontosabban a kitöltési tényezőt.
Mondjuk a FET hídban a FETek diódái szabadonfutóként működnek, így ezek elnyelik a tranziensek nagyrészét.
5 fázisú vezérlőt unipolárist csináltam ami működött, (bipoláis mindig felrobbant amint 2A fölé mentem :D ) itt 3-4A-ert is belehajtottam 30V-ról. Ezek is pontosan mozogtak, de ez nem volt gyors, mert nem volt áram vezérlés, így pedig nagyon melegedett már kisebb gerjesztéssel is.
Én bipolárisat építettem 4 FET-es híddal.
12V nem tudom mekkora áram, de elég kicsi nyomtató motorokat hajtottam. Az áramot a motor melegedéshez állítottam, pontosabban a kitöltési tényezőt.
Mondjuk a FET hídban a FETek diódái szabadonfutóként működnek, így ezek elnyelik a tranziensek nagyrészét.
5 fázisú vezérlőt unipolárist csináltam ami működött, (bipoláis mindig felrobbant amint 2A fölé mentem :D ) itt 3-4A-ert is belehajtottam 30V-ról. Ezek is pontosan mozogtak, de ez nem volt gyors, mert nem volt áram vezérlés, így pedig nagyon melegedett már kisebb gerjesztéssel is.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 január 08, 09:53
Írta: keri Dátum 2012 január 08, 09:53
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2012 január 08, 09:55
Írta: D.Laci Dátum 2012 január 08, 09:55
"35V-on jártam már 40kHznél is"
némi tulzásnak tartom ezeket az adatokat
milyen motor milyen vezérlö? milyen mechanikán alkalmazod?
26000/200/4*60 (negyed lépés esetén) 1950 ford/min. ha ehez veszünk egy 2mm-es fordulatonkénti elmozdulást az 3900mm/min elötolás. Anno én örültem ha 300-400al pörgöt a léptetö motorom lépésvesztés nélkül... :(
némi tulzásnak tartom ezeket az adatokat
milyen motor milyen vezérlö? milyen mechanikán alkalmazod?
26000/200/4*60 (negyed lépés esetén) 1950 ford/min. ha ehez veszünk egy 2mm-es fordulatonkénti elmozdulást az 3900mm/min elötolás. Anno én örültem ha 300-400al pörgöt a léptetö motorom lépésvesztés nélkül... :(
Cím: Re:Léptetőmotor
Írta: cx79vmdj5 Dátum 2012 január 08, 11:35
Írta: cx79vmdj5 Dátum 2012 január 08, 11:35
3V 2A-es a motor, 200lépés/kör felbontással. A vezérlő saját épités, unipoláris, féllépéses, sajna nem is működik jól. Az adat amit irtam, turbocnc max. frekvencia. Mechanika nélkül gumilapon pörgött eddig a fordulatig, ha hozzáérek, megáll, de kézben tartva sem birja eddig.
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2012 január 08, 12:48
Írta: D.Laci Dátum 2012 január 08, 12:48
Féllépéses üzem módban 3900ford/min.... épitet unipoláris vezérlövel.. hm...
Szerintem elégedj meg a 600ford/min -el is...(4Khz)
Szerintem elégedj meg a 600ford/min -el is...(4Khz)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 január 08, 13:30
Írta: s7manbs8 Dátum 2012 január 08, 13:30
Úgy is van az, magában pörög az annyit is, de értelmes felhasználáskor a maximum D.Laci szerinti kb.
Cím: Re:Léptetőmotor
Írta: RogerCo Dátum 2012 január 08, 13:33
Írta: RogerCo Dátum 2012 január 08, 13:33
Sziasztok!
Van 3db egyforma T2CNC-s 3.1Nm-es NEMA23-as léptető motorom MSD70-es vezérlőkkel. Az egyik motorom elkezdett sz@rakodni. Egyik irányba gyönyörűen megy, a másik irányban zajos, ideges a motor. a gyorjáratot nem is bírja. Át tettem a motort a kábelével egy másik tengely vezérlőjére. Ugyan az. Utánna a kábelt is kicseréltem. ugyan az. tehát a motor vacakol. Mi lehet vele? Eddig ment szépen mind a három. kb 3 évesek a motorok, de üzemóra nincs több bennük 20 óránál.
Van ötelet valakinek? Vagy mit lehet ezzel csinálni?
Köszi:
ROger
Van 3db egyforma T2CNC-s 3.1Nm-es NEMA23-as léptető motorom MSD70-es vezérlőkkel. Az egyik motorom elkezdett sz@rakodni. Egyik irányba gyönyörűen megy, a másik irányban zajos, ideges a motor. a gyorjáratot nem is bírja. Át tettem a motort a kábelével egy másik tengely vezérlőjére. Ugyan az. Utánna a kábelt is kicseréltem. ugyan az. tehát a motor vacakol. Mi lehet vele? Eddig ment szépen mind a három. kb 3 évesek a motorok, de üzemóra nincs több bennük 20 óránál.
Van ötelet valakinek? Vagy mit lehet ezzel csinálni?
Köszi:
ROger
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 január 08, 16:44
Írta: s7manbs8 Dátum 2012 január 08, 16:44
Találkoztam már ilyen motorral, ami ezt csinálta, az is egyik irányba zajos volt és nem bírta a gyors menést sem, de hogy mi volt a baja, mai napig nem tudom. Az is új volt.
Cím: Re:Léptetőmotor
Írta: yd0cksecy Dátum 2012 január 08, 18:56
Írta: yd0cksecy Dátum 2012 január 08, 18:56
Sziasztok!
Egy léptetőmotor adataiból (fesz., áram, induktivitás), hogyan lehet meghatározni a vezérlő tápfeszét?
Egy léptetőmotor adataiból (fesz., áram, induktivitás), hogyan lehet meghatározni a vezérlő tápfeszét?
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 január 08, 20:45
Írta: keri Dátum 2012 január 08, 20:45
Nagyjából úgy ahogy a hajó hosszából azt, hogy hány éves a kapitány.
Magyarul nem függ össze. A vezérlő tápfeszét a vezérlő paraméterei között keresd. A motornak meg kb. akkora feszt lehet adni amekkorát a szigetelése kibír. Régi motorknál 70volt körül, az újabbak 100V-ot is bírnak.
Magyarul nem függ össze. A vezérlő tápfeszét a vezérlő paraméterei között keresd. A motornak meg kb. akkora feszt lehet adni amekkorát a szigetelése kibír. Régi motorknál 70volt körül, az újabbak 100V-ot is bírnak.
Cím: Re:Léptetőmotor
Írta: yd0cksecy Dátum 2012 január 08, 21:13
Írta: yd0cksecy Dátum 2012 január 08, 21:13
Motor adtok:
Tekercsáram [A] 1.25
Ellenállás [Ohm] 0.76
Feszültség [V] 0.94
Induktivitás [mH] 0.75
Akkor a vezérlőn a motor áramát kell beállítani (bekötéstől függően) és adni neki tápot és akkor megy is.
És a táp értéke mekkora? Pl.: 24V Dc
Mert sokfelé olvasgatom, hogy nagyobb felszültséggel járatják a motort... De hogyan ha vezérlő áramra szabályoz...
Most jutott az eszembe.
Ha mimnél nagyobb a tekercsre kapcsolt fesz akkor az áram annál gyorsabban tud kialakulni a tekercsekben és akkor nagyobb lesz a pillanatnyi nyomatéka is? – Jól gondolom...?
Tekercsáram [A] 1.25
Ellenállás [Ohm] 0.76
Feszültség [V] 0.94
Induktivitás [mH] 0.75
Akkor a vezérlőn a motor áramát kell beállítani (bekötéstől függően) és adni neki tápot és akkor megy is.
És a táp értéke mekkora? Pl.: 24V Dc
Mert sokfelé olvasgatom, hogy nagyobb felszültséggel járatják a motort... De hogyan ha vezérlő áramra szabályoz...
Most jutott az eszembe.
Ha mimnél nagyobb a tekercsre kapcsolt fesz akkor az áram annál gyorsabban tud kialakulni a tekercsekben és akkor nagyobb lesz a pillanatnyi nyomatéka is? – Jól gondolom...?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 január 08, 22:49
Írta: svejk Dátum 2012 január 08, 22:49
Olvasd el a vezérlőkártyád műszaki adatait, ott fogsz találni a tápfeszültség kérdésedre választ.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 január 09, 10:13
Írta: keri Dátum 2012 január 09, 10:13
Igen, pontosan így van.
A motor adatokat másként kell értelmezni mint mondjuk egy ablaktörlő motornál
Az ugye mondjok 1A 12V, ráteszed a 12V-ot és kb. 1A fog rajta menni és ezt folyamatosan bírja.
A léptető motorok esetén is a folyamatos DC értékeket adják meg, de üzem közben ez már nem lesz igaz.
Na lépjünk visszább. Egy elektromágnes által kifejtett erő attól függ hogy mennyi a gerjesztő áram. Motoroknál is a rajta átfolyó áram hozza létre a nyomatékot. Ha nagy menetszámot használunk a tekercsben akkor a felvett áramot szorozni kell a menetszámmal, csakhogy ilyenkor lassabban alakul ki az indukció miatt az áram, végeredményben pedig olyan lassan, hogy a motor sebességét is ez határozza meg. Egy ablaktörlő motornál ez így is van, ezért is megy kvázi stabil fordulatszámon, annyira hogy még a magnókban is előszeretettel alkalmazták.
Ha csökkentjük az indukciót, akkor viszont adott feszültség hatására a szükségesnél nagyobb áram is kialakulhat, ami végeredményben a motor leégéséhez vezet. Ezért a szabályzók manapság az áramot szabályozzák, így mindig a fizikailag lehetséges maximális nyomaték áll rendelkezésre fordulatszámtól függetlenül. (határok között)
Lényegében minnél nagyobb a feszültség felső határa, annál gyorsabban tud kialakulni a mágneses tér és lényegében annál nagyobb fordulatszámot tud a motor.
És persze a mai motorkat úgy tervezik, hogy nem feszültség, hanem áramszabályzott meghajtás kell nekik, ezért kisebb az indukció, széleseb tartományban lehet üzemeltetni.
Nekem még van olyan léptetőm ami ténylegesen 12V-os. 4 tranzisztor a vezérlő hozzá, szóval ennek is megvan az előnye, de töredéke teljesítményre képes mint egy ugyan akkora modern léptető.
Persze a feszültség növelése nem korlátlanul növeli a fordulatszámot, vannak más fizikai határok is, de alapvetően 24V-al már használhatóak a mai motorok, 30-35V-al egészen kellemes, de azért érezhetően javul ha 70V-al tudod küldeni. Ráadásul egy komolyabb vezérlő simább járást (hatékonyabb működés) is tud csinálni a motornak ami további teljesítmény javulást okoz.
A motor adatokat másként kell értelmezni mint mondjuk egy ablaktörlő motornál
Az ugye mondjok 1A 12V, ráteszed a 12V-ot és kb. 1A fog rajta menni és ezt folyamatosan bírja.
A léptető motorok esetén is a folyamatos DC értékeket adják meg, de üzem közben ez már nem lesz igaz.
Na lépjünk visszább. Egy elektromágnes által kifejtett erő attól függ hogy mennyi a gerjesztő áram. Motoroknál is a rajta átfolyó áram hozza létre a nyomatékot. Ha nagy menetszámot használunk a tekercsben akkor a felvett áramot szorozni kell a menetszámmal, csakhogy ilyenkor lassabban alakul ki az indukció miatt az áram, végeredményben pedig olyan lassan, hogy a motor sebességét is ez határozza meg. Egy ablaktörlő motornál ez így is van, ezért is megy kvázi stabil fordulatszámon, annyira hogy még a magnókban is előszeretettel alkalmazták.
Ha csökkentjük az indukciót, akkor viszont adott feszültség hatására a szükségesnél nagyobb áram is kialakulhat, ami végeredményben a motor leégéséhez vezet. Ezért a szabályzók manapság az áramot szabályozzák, így mindig a fizikailag lehetséges maximális nyomaték áll rendelkezésre fordulatszámtól függetlenül. (határok között)
Lényegében minnél nagyobb a feszültség felső határa, annál gyorsabban tud kialakulni a mágneses tér és lényegében annál nagyobb fordulatszámot tud a motor.
És persze a mai motorkat úgy tervezik, hogy nem feszültség, hanem áramszabályzott meghajtás kell nekik, ezért kisebb az indukció, széleseb tartományban lehet üzemeltetni.
Nekem még van olyan léptetőm ami ténylegesen 12V-os. 4 tranzisztor a vezérlő hozzá, szóval ennek is megvan az előnye, de töredéke teljesítményre képes mint egy ugyan akkora modern léptető.
Persze a feszültség növelése nem korlátlanul növeli a fordulatszámot, vannak más fizikai határok is, de alapvetően 24V-al már használhatóak a mai motorok, 30-35V-al egészen kellemes, de azért érezhetően javul ha 70V-al tudod küldeni. Ráadásul egy komolyabb vezérlő simább járást (hatékonyabb működés) is tud csinálni a motornak ami további teljesítmény javulást okoz.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 január 10, 19:28
Írta: 000000000 Dátum 2012 január 10, 19:28
Sziasztok
Az lenne a kérdésem hogy tesztelés alatt van a gép.A kezdő pontok meghatározásakor olyan történt hogy mach3 alól tökéletesen müködött a Z tengely vezérlése a kurzor billentyükről. Most pedig a Mach3-ba jól látszik az előre hátra mozog.Most viszont csak elöre mozog.Hátra nem az asztal. Ha hátra mozgatom akkor is előre mozog.
Mi lehet a gond vezérlés vagy motor?
Köszönettel
Az lenne a kérdésem hogy tesztelés alatt van a gép.A kezdő pontok meghatározásakor olyan történt hogy mach3 alól tökéletesen müködött a Z tengely vezérlése a kurzor billentyükről. Most pedig a Mach3-ba jól látszik az előre hátra mozog.Most viszont csak elöre mozog.Hátra nem az asztal. Ha hátra mozgatom akkor is előre mozog.
Mi lehet a gond vezérlés vagy motor?
Köszönettel
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 január 10, 19:49
Írta: 000000000 Dátum 2012 január 10, 19:49
A vezérlődhöz nem jut el a Dir jel csak a Step.
Lehet érintkezési gond, vagy valamit elállítottál a Port&Pin beállításában.
Lehet érintkezési gond, vagy valamit elállítottál a Port&Pin beállításában.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 január 11, 08:46
Írta: svejk Dátum 2012 január 11, 08:46
Az ipari léptetőmotor vezérlőknél, de vagy akár az L297-es IC-nél is van egy HOME kimenet.
Ez a kimenet egy bizonyos kimeneti kombinációnál actív csak.
Ez mire is szolgál pontosan?
Talán csak pl. egy mechanikus referencia kapcsoló pontosítására jó mindössze?
Vagy??
Ez a kimenet egy bizonyos kimeneti kombinációnál actív csak.
Ez mire is szolgál pontosan?
Talán csak pl. egy mechanikus referencia kapcsoló pontosítására jó mindössze?
Vagy??
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 január 11, 10:14
Írta: 000000000 Dátum 2012 január 11, 10:14
Köszi mindenkinek ma megnézem.
Cím: Re:Léptetőmotor
Írta: r5y7cufaj Dátum 2012 január 11, 11:04
Írta: r5y7cufaj Dátum 2012 január 11, 11:04
Sziasztok!
A kérdésem e képpen szól: Le lehet szakszerűen szedni ezekről a motorokról a bordás-kerekeket?
Üdv!
A kérdésem e képpen szól: Le lehet szakszerűen szedni ezekről a motorokról a bordás-kerekeket?
Üdv!
Cím: Re:Léptetőmotor
Írta: Béni Dátum 2012 január 11, 11:12
Írta: Béni Dátum 2012 január 11, 11:12
Igen. 3 karos lehúzóval. (Kisebb az esély a tengely elgörbítésére.)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 január 11, 11:18
Írta: svejk Dátum 2012 január 11, 11:18
Szakszerűen célszerszámmal, nem teljesen szakszerűen a bronzkerekek sokk szerű felmelegítésével és két lapos csavarhúzóval.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 január 11, 11:19
Írta: svejk Dátum 2012 január 11, 11:19
Természetese van még brutálisabb módszer is, de ahhoz el kell dönteni melyik alkatrészre van szükséged :))
Cím: Re:Léptetőmotor
Írta: r5y7cufaj Dátum 2012 január 11, 11:35
Írta: r5y7cufaj Dátum 2012 január 11, 11:35
Köszönöm a válaszokat, én is melegítésre gondoltam.
Cím: Re:Léptetőmotor
Írta: ra8nsmk6w Dátum 2012 január 11, 11:35
Írta: ra8nsmk6w Dátum 2012 január 11, 11:35
Csinálj egy árnyékoló lemezt egy darab alulemezből. Hőlégfúvóval melegitsd fel és két derékszögű lapos csavarhúzóval simán lejön. Ha nem melegited fel akkor is lejön, de van úgy, hogy a forgórészből kihuzza a tengelyt. A derékszögű csavarhuzó egy fontos kellék, de csak párossával
Cím: Re:Léptetőmotor
Írta: r5y7cufaj Dátum 2012 január 11, 11:37
Írta: r5y7cufaj Dátum 2012 január 11, 11:37
Mi lenne ha leesztergálnám?
(motort meghajtva)
(motort meghajtva)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 január 11, 11:51
Írta: svejk Dátum 2012 január 11, 11:51
Ilyesmire utaltam a #3094-ben, csak nem tudtam melyik része kell.
Egyébként egyszerűbb leköszörülni az egyik oldalát a tengelyig.
Mindenesetre a képet elnézve, pedig az a bronz kerék többet ér mint maga a motor :(
Egyébként egyszerűbb leköszörülni az egyik oldalát a tengelyig.
Mindenesetre a képet elnézve, pedig az a bronz kerék többet ér mint maga a motor :(
Cím: Re:Léptetőmotor
Írta: Sz.József Dátum 2012 január 11, 11:53
Írta: Sz.József Dátum 2012 január 11, 11:53
Ha nincsen szükséged a fogaskerékre akkor satuban
nyomd meg a kereket,
azután fordítasz 90fokot, még egyszer "megnyomorítod" és lehet kézzel is lejön, de két csavarhúzóval erőlködés nélkül biztosan...
nyomd meg a kereket,
azután fordítasz 90fokot, még egyszer "megnyomorítod" és lehet kézzel is lejön, de két csavarhúzóval erőlködés nélkül biztosan...
Cím: Re:Léptetőmotor
Írta: r5y7cufaj Dátum 2012 január 11, 11:59
Írta: r5y7cufaj Dátum 2012 január 11, 11:59
Köszönöm az infokat!
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 január 11, 12:14
Írta: svejk Dátum 2012 január 11, 12:14
Talán nincs is ennél egyszerűbb. [#eljen]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 január 11, 12:45
Írta: 000000000 Dátum 2012 január 11, 12:45
Én ezt úgy csináltam, hogy fogtam egy reszelőt és adtam a keréknek vele majdnem a tengelyig. Fellazult és leesett róla.
Cím: Re:Léptetőmotor
Írta: ggdr57dg Dátum 2012 január 11, 14:41
Írta: ggdr57dg Dátum 2012 január 11, 14:41
Van egy kisebb marék újra hasznosításra váró L297 otthon, ezért is érdekel a HOME kimenet. Amit itt olvastam, az kb. annyi, amit Te is írtál. Fél lépés és Normal drive módban az állapot szekvencia kezdetét (1) jelöli, a RESET hatására a logika a HOME pozícióba áll a szekvenciában, vagyis annak kezdetére. Ez - ha jól okoskodok - egy 1,8°/lépés motor esetén 50-szer következik be minden tengely fordulat alatt. Számomra ebből az következik, hogy ha pl. egy ilyen motor direktbe hajt egy 2mm emelkedésű orsót, a hajtott tengely minden 1/25mm-nél (gyk. 0,04mm :-) aktív a HOME kimenet. Sajnos nem igazán értek (még) hozzá, de azt gondolom, hogy ez kicsit sok HOME pozíciónak, ezért kell egy mechanikus pozíció adó is, amit AND kapcsolatba kell hozni a HOME kimenettel. Egy másik L297 adatlap szerint: "RESET is an asynchronous reset input which restores the translator block to the home position (state 1, ABCD = 0101). The HOME output (open collector) signals this condition and is intended to the ANDed with the output of a mechanical home position sensor"
Remélem nem írtam nagy butaságot, és ez persze az L297-re vonatkozik.
Remélem nem írtam nagy butaságot, és ez persze az L297-re vonatkozik.
Cím: Re:Léptetőmotor
Írta: dcsaba Dátum 2012 január 11, 15:10
Írta: dcsaba Dátum 2012 január 11, 15:10
Én egyszerűen összeroppantottam a kereket.
Cím: Re:Léptetőmotor
Írta: cx79vmdj5 Dátum 2012 január 13, 11:12
Írta: cx79vmdj5 Dátum 2012 január 13, 11:12
Sziasztok!
Ha valaki épitett sla7021-el, sla7024-el, vagy sla7026-al több tengelyes vezérlőt, és működött neki lépésvesztés nélkül, és a kapcsolási rajzot, és a nyáktervet el tudná nekem juttatni, ezt a segitségét megköszönném neki.
Ha valaki épitett sla7021-el, sla7024-el, vagy sla7026-al több tengelyes vezérlőt, és működött neki lépésvesztés nélkül, és a kapcsolási rajzot, és a nyáktervet el tudná nekem juttatni, ezt a segitségét megköszönném neki.
Cím: Re:Léptetőmotor
Írta: kisinas Dátum 2012 január 13, 12:42
Írta: kisinas Dátum 2012 január 13, 12:42
Szia !
Ezt az oldalt már régóta ismerem, az adott kapcsolás nem tudom mennyire megbízható, egyszerű regisztrációval a nyákterv is letölthető:
sla 7024
Ezt az oldalt már régóta ismerem, az adott kapcsolás nem tudom mennyire megbízható, egyszerű regisztrációval a nyákterv is letölthető:
sla 7024
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 január 13, 17:23
Írta: besirkyjh Dátum 2012 január 13, 17:23
Szia
Ez még nem megy step/dir meghajtással , kel hozzá még egy meghajto is .Az hogy unipoláris nem gond ?
Komplett terv nincs ?
Ez még nem megy step/dir meghajtással , kel hozzá még egy meghajto is .Az hogy unipoláris nem gond ?
Komplett terv nincs ?
Cím: Re:Léptetőmotor
Írta: cx79vmdj5 Dátum 2012 január 14, 12:02
Írta: cx79vmdj5 Dátum 2012 január 14, 12:02
Nem baj hogy unipoláris, 8 kivezetésesek a motorjaim(meg van unipoláris 6os is), és épitettem neki féllépés előtétet piccel, meg ttl-cmos-al is, igy fogadja a stepdir jelet, de ellép. Keresem a hibáját, és szeretnék tapasztalatot gyújteni, hogy másnak hogy megy. A mechanikus rezonancia jelentkezik akkor is, ha a tápra sütöm ki a tekercset diódán keresztül?
Cím: Re:Léptetőmotor
Írta: cx79vmdj5 Dátum 2012 január 14, 12:03
Írta: cx79vmdj5 Dátum 2012 január 14, 12:03
Nem baj hogy unipoláris, 8 kivezetésesek a motorjaim(meg van unipoláris 6os is), és épitettem neki féllépés előtétet piccel, meg ttl-cmos-al is, igy fogadja a stepdir jelet, de ellép. Keresem a hibáját, és szeretnék tapasztalatot gyújteni, hogy másnak hogy megy. A mechanikus rezonancia jelentkezik akkor is, ha a tápra sütöm ki a tekercset diódán keresztül?
Cím: Re:Léptetőmotor
Írta: b87bwu04m Dátum 2012 január 16, 16:35
Írta: b87bwu04m Dátum 2012 január 16, 16:35
Tisztelt Szakértő Urak!
Szeretném a segítségeteket kérni egy léptetőmotor (SLO-SYN M062-LF-521, Superior Electric) és egy motorvezérlő (IDEAL DEH Motor Drive ASS, IA-1933) ügyében. A vezérlőről sajnos semmit nem találtam, valami egyedi dolog lehet.
A gép, amiben ezek vannak, végtelen egyszerű, a motor anyagtovábbítást végez, kábelt továbbít előre egy késhez, majd a kés vágása után visszahúzza/csupaszítja...
Most azonban elromlott és a motor csak hangosan zúg-morog, de nem forog se előre, sem vissza, még kézzel sem tudom közben semelyik irányba eltekerni.
Tudna valaki segíteni, hogy a motorban, vagy a vezérlőben keressem a hibát??? A motornak nem ismerem a bekötését, így gyakorlatilag azt sem tudom, hogy hol és mit mérjek...
Kérlek benneteket, hogy ha ötletetek van, akkor segítsetek!
Köszönet érte előre is. Üdv: Atom72
Szeretném a segítségeteket kérni egy léptetőmotor (SLO-SYN M062-LF-521, Superior Electric) és egy motorvezérlő (IDEAL DEH Motor Drive ASS, IA-1933) ügyében. A vezérlőről sajnos semmit nem találtam, valami egyedi dolog lehet.
A gép, amiben ezek vannak, végtelen egyszerű, a motor anyagtovábbítást végez, kábelt továbbít előre egy késhez, majd a kés vágása után visszahúzza/csupaszítja...
Most azonban elromlott és a motor csak hangosan zúg-morog, de nem forog se előre, sem vissza, még kézzel sem tudom közben semelyik irányba eltekerni.
Tudna valaki segíteni, hogy a motorban, vagy a vezérlőben keressem a hibát??? A motornak nem ismerem a bekötését, így gyakorlatilag azt sem tudom, hogy hol és mit mérjek...
Kérlek benneteket, hogy ha ötletetek van, akkor segítsetek!
Köszönet érte előre is. Üdv: Atom72
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 január 18, 16:02
Írta: 000000000 Dátum 2012 január 18, 16:02
Üdv!
Valami hozzáértő leírhatná, hogy mi az előnye vagy a hátránya a külömböző kötésmódoknak bipoláris motoroknál. Csak összevisszaságot tudtam róla összeszedni.
Valami hozzáértő leírhatná, hogy mi az előnye vagy a hátránya a külömböző kötésmódoknak bipoláris motoroknál. Csak összevisszaságot tudtam róla összeszedni.
Cím: Re:Léptetőmotor
Írta: Sz.József Dátum 2012 január 18, 16:25
Írta: Sz.József Dátum 2012 január 18, 16:25
Cím: Re:Léptetőmotor
Írta: Sz.József Dátum 2012 január 18, 16:28
Írta: Sz.József Dátum 2012 január 18, 16:28
A linket lehet elszúrtam...
Erre kattints bal oldalt.
"H2 PCB CNC Vezérlők ! "
Erre kattints bal oldalt.
"H2 PCB CNC Vezérlők ! "
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 január 18, 16:44
Írta: 000000000 Dátum 2012 január 18, 16:44
OK, kössz mindenkinek.
Cím: Re:Léptetőmotor
Írta: hostya Dátum 2012 január 18, 18:30
Írta: hostya Dátum 2012 január 18, 18:30
Lehet hogy ezsegít az eligazodásban.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 január 30, 18:50
Írta: 000000000 Dátum 2012 január 30, 18:50
Ha egy 6 kivezetéses motoron az olvasható, hogy 1.1A-es, akkor az unipoláris kötésre vonatkozik? Csak mert bipolárisan kötném inkább; jól tudom, hogy ekkor 2A-re is állíthatom az áramot, ha a tekercsek középső kivezetéseit nem használom?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 január 30, 19:41
Írta: 000000000 Dátum 2012 január 30, 19:41
Nem jól tudod!
AZ a 1.1 amper azt jelenti, hogy akár melyik tekercsen ennyi áram folyhat át.
Ha nem használod a középső vezetéket akkor a tekercsek sorba vannak kötve, tehát mindegyiken ugyan az az áram folyik át, ami a te esetedben max 1.1A lehet.
Ha 8 kivezetéses lenne a motor és párhuzamosan kötöd a két tekercset akkor lehet a tekercsáram kétszeresét alkalmazni.
AZ a 1.1 amper azt jelenti, hogy akár melyik tekercsen ennyi áram folyhat át.
Ha nem használod a középső vezetéket akkor a tekercsek sorba vannak kötve, tehát mindegyiken ugyan az az áram folyik át, ami a te esetedben max 1.1A lehet.
Ha 8 kivezetéses lenne a motor és párhuzamosan kötöd a két tekercset akkor lehet a tekercsáram kétszeresét alkalmazni.
Cím: Re:Léptetőmotor
Írta: hostya Dátum 2012 január 30, 19:47
Írta: hostya Dátum 2012 január 30, 19:47
Itt van lentebb...
Olvasd el a #3115-ben a linket.
Olvasd el a #3115-ben a linket.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 február 06, 11:32
Írta: ht0cjk58i Dátum 2012 február 06, 11:32
Kamera mozgató fejet készítenék léptecsel van 1 PIC-es vezérlő és sima IC-s is szerintetek melyik lenne a jobb?
Léptecs
Léptecs
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 február 06, 11:36
Írta: ht0cjk58i Dátum 2012 február 06, 11:36
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 február 06, 11:51
Írta: 000000000 Dátum 2012 február 06, 11:51
És hogy képzeled el ezzel a vezérlővel a mozgatást?
Van rajta egy gomba a jobbra egy a balra forgásnak és egy stop-nak.
Gondolom akkor addig forog a kiválasztott irányba ameddig nem nyomsz egy stop-ot.
És még a potméterrel ki kell választani a sebességet is eközben.
Kicsit macerás lesz ezt így kezelni.
Van rajta egy gomba a jobbra egy a balra forgásnak és egy stop-nak.
Gondolom akkor addig forog a kiválasztott irányba ameddig nem nyomsz egy stop-ot.
És még a potméterrel ki kell választani a sebességet is eközben.
Kicsit macerás lesz ezt így kezelni.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 február 06, 11:57
Írta: ht0cjk58i Dátum 2012 február 06, 11:57
Igen valahogy így.Ahogy nézem a kapcsolásokat nem is olyan macerásak :)
Csak nem tom melyik kapcsolás lenne a jó,szimulálni is próbáltam de nem akar menni,pedig 5 áramkör szimulátort is próbáltam.
Csak nem tom melyik kapcsolás lenne a jó,szimulálni is próbáltam de nem akar menni,pedig 5 áramkör szimulátort is próbáltam.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 február 06, 12:09
Írta: keri Dátum 2012 február 06, 12:09
Ha tudsz programozni PIC-et akkor az jóval egyszerűbb és rugalmasabb, de lényegében ugyan azt csinálja mindkettő.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 február 06, 12:12
Írta: keri Dátum 2012 február 06, 12:12
Minek ezt szimulálni?
Össze kell rakni és működik, de igazából ilyen gombos vezérléshez felesleges léptetőmotor. Sima DC motor és kész. Ugyan ez az eredmény.
A Léptető motornak akkor lenne értelme, ha PC-ről vezérelnéd előre programozott terv alapján.
Össze kell rakni és működik, de igazából ilyen gombos vezérléshez felesleges léptetőmotor. Sima DC motor és kész. Ugyan ez az eredmény.
A Léptető motornak akkor lenne értelme, ha PC-ről vezérelnéd előre programozott terv alapján.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 február 06, 12:15
Írta: ht0cjk58i Dátum 2012 február 06, 12:15
Igen de a léptecseknek kisebb a fordulata nem?Ezért gondoltam rá.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 február 06, 12:19
Írta: 000000000 Dátum 2012 február 06, 12:19
Ha már léptetőmotor akkor egy kézi kerékkel mozgatnám mint ahogy a nagyok is csinálják kamera mozgatás terén.
Ezzel életszerűbb a mozgatás és a kezelés ás 5 perc alatt megszokható.
És a bakinak az esély is elenyésző lesz.
Ezzel életszerűbb a mozgatás és a kezelés ás 5 perc alatt megszokható.
És a bakinak az esély is elenyésző lesz.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 február 06, 12:27
Írta: ht0cjk58i Dátum 2012 február 06, 12:27
Na ez nem is rossz ötlet,köszi.És ezt szerinted hogy oldjam meg?Léptecs + vezérlő + kézikerék (hagyományos vezérlő PC-s)?
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 február 06, 12:47
Írta: keri Dátum 2012 február 06, 12:47
DC motorra meg rakni kell egy áttételt és ugyan az az eredmény, ráadásul egyenletesebb is a járása mint egy léptetőnek...bár a fogaskerekek zaja nagyobb, ami gáz ha a mikrofon is a kamerán van, szóval valami szíjas áttételt javasolnék, mert az csöndes, annyira hogy régen a magnók hajtására is használták.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 február 06, 13:04
Írta: ht0cjk58i Dátum 2012 február 06, 13:04
Hát igen csak az a baj a DC-vel, hogy nem találtam normális vezérlőt hozzá.Mind a kettő áttételes lenne, a miki meg nem fog menni.Az áttétel nem baj ha zajos.A gombos- joy-os vezérlés lenne a mérvadó.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 február 06, 13:04
Írta: 000000000 Dátum 2012 február 06, 13:04
Gyorsan összecsaptam egy hevenyészett rajzot.
Viszont a léptető nem szereti a nagy gyorsításikat amiből még lehetnek problémák.
Ezt a fajta vezérlést csak is próbára ajánlom.
Az enkóder felbontását érdemes 400-ra választani és így olyan mintha közvetlen a motor tengelyét forgatnád távolról.

Viszont a léptető nem szereti a nagy gyorsításikat amiből még lehetnek problémák.
Ezt a fajta vezérlést csak is próbára ajánlom.
Az enkóder felbontását érdemes 400-ra választani és így olyan mintha közvetlen a motor tengelyét forgatnád távolról.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 február 06, 13:09
Írta: ht0cjk58i Dátum 2012 február 06, 13:09
Nem rossz ;)
Közben a srác szólt, hogy a joyos irányítás kéne,
előre-hátra + seb.
Közben a srác szólt, hogy a joyos irányítás kéne,
előre-hátra + seb.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 február 06, 13:10
Írta: ht0cjk58i Dátum 2012 február 06, 13:10
(http://

Ez az a vezérlő.
Szerintem az 5 ezer kicsit el van túlozva 5 mm orsóval.
Ha, 2: 1 áttételt tesz, akkor, kb. 2 - 2,2 ezer körüli sebességre, számíthat max.
Több dolgot is tudni kellene, a továbblépéshez.
Szívesen segítenék személyesen, ha nem laksz túl messze hatvantól.
Az utóbit azért nem mondanám fixre. Ha erre jársz, mutatok neked marógépet léptetőmotorral. Húsz ezer feletti sebességgel tud menni.
Nem, ennyire fekete, fehér a dolog.
Köszönöm, hogy közzé tetted. Tanulságos.
Kb. 2 éve kísérletezgettem én is hasonló dologgal. Sajnos, valódi mérést nem tudtam végezni.
Következtetéseim hasonlóak voltak.
Még, érdekes lenne, különböző mikrolépésekkel. Legalább az első4-5 ben.
Viszont, továbbra is késztetést érzek, a léptetők, és vezérlők lelkivilágának megismerésére.
Ezért, érdekelne, hogyan is készült a mérőberendezés?
Ha, lehet, nekiállnék én is készíteni.
Köszönöm a bemutatást!
Ez, még az esetleges pontatlansága mellett is, igen jó támpontot tud adni.
Nagy előnye, a módszernek, hogy működésközbeni viselkedést mér. Messze túlmutatva a tartónyomaték mérésen.
Készítek én is egy hasonló „műszert.”
Azt látom, hogy a motor túl van pörgetve. Ráadásul, ahhoz képest alacsony feszültséget kap.
A motor fordulatát, 700 max 800 fölé nem kellene vinni, mert instabillá válik. Nagyobb fordulaton, jobban előjönnek a motor hibái is, ha van.
Próbáld ki 700 -ason, és 1200 mikro lépéssel. Fél, tartóárammal.
Ajánlom, nézd meg a motor jelleg görbéjét. Ami, ideális körülményekre vonatkozik. Ami, valószínűleg nálad nincs.
Ha, nagyobb sebességre van szükség, a dinamika rovására, akkor változtatni kell az áttételen, vagy orsócsere.
Másrészt, azt gondolom, az a PC, amivel megy, nem képes kiszolgálni megfelelő minőségű, és, sebességű jellel a vezérlőt. (A leírásod alapján, ez elég egyértelmű)
Az is előfordul, hogy ez a port hibájából van. (De, nálam, videokártya is okozott már hasonló hibát.)
Másrészt, a motorok között is van eltérés, típuson belül is abban, hogy milyen gyorsan képes, a mágneses erőteret felépíteni, és megszüntetni.
De, gondolni kell arra is, hogy gyártási hibás, vagy ütést kaphatott.
Érdekes lenne, tudni, a jelszélességek, hogy vannak állítva?
De, én, ráraknám, egy jobb PC. re legalább próbaképpen.
A PC. GND –jét is közösítsd a többi GND vel. A gépvázzal is.
Biztosan legalább két oka van a jelenségnek, ezért nehezebb kideríteni, megszüntetni. Ezek, a hibák, egymást erősítik.


Ha, ezt, pár évvel előbb mondod, el se kezdtem volna. [#nevetes1]
Tiszteletem!
Na ez egy izgi téma lassan elkészülő gépemet én is egy ilyen vezérlővel szeretném mozgatni de ahogy ragad rám az infó a koszon kívül azt kezdem tapasztalni, hogy ez a vezérlő egy zsákutca de a kérdésem az lenne hogy egy ilyen vezérlővel előrébb lennék mondjuk ez vagy ez is felejtős és valami komolyabb kellene ha valami értelmeset akarok össze hozni (tudom vegyek szervot, de még most jó nekem a léptecs is)
valaki tudna mondani valami példát ami nem túl drága?
Van az MSD és a MSDD kettő között mi a különbség azon kívül hogy az utóbbi digitális? A motornál jóval nagyon teljesítmény növekedés lép fel vagy gyorsabb vagy pontosabb? Mondjuk lenne egy 3Nm motor arra elég a kisebb(MSDD-40-3.2) vezérlő is de ha nagyobbat(MSDD-80-5.6) kötöm rá akkor jobb teljesítményt érhetek el?
Sajna csak ennyit tudok a motorról
Nema23
Lépés: 1,8
Áram: 3A
Nyomaték: 3Nm
Súlya: 1,55kg
Hossza: 115mm
Kivezetés: 4 vezeték
Ment PÜ-et!
Tibor!
Mit jelent a / jel előtt az egyes?
Köszi!
Akkor az nem egyes.
Ez igen! Így már más.
Persze, szerintem, itt célszerűbb lenne az általam, és mindenki által ismert f/p használata.
Mivel, itt sokan vagyunk, sok félék.
Jó, ha közérthetően beszélünk.
Kb, 4 ezer körüli előtolást tudsz elérni 16-20/5 mm átmérőjű orsóval.
A fém, megmunkálás, főleg a gépvázon fog múlni.
A gyári, fémipari CNC –m max 2500 előtolásra van állítva. Nagyon, nagyon ritkán használom ezen a sebességen.
1000 – 1500 az átlagos.
Elméletileg jó. De, én, inkább egyel nagyobb vezérlőt raknék hozzá.
Ahogy lentebb írtam. Átlagos hobby gépen 4 -4500 elérhető.
De, azt tudnod kell, hogy a végsebesség nem minden. A dinamika, általában lényegesebb.
Tibor is erre célzott. Ha, fémbe is gondolkodol, akkor. És nem nagy munkaterületbe, akkor célszerű lenne a felezőhöz közeli áttétel.
Igen, a 80 v –osra. De, ha már megvan.
Mi az a protuner?
És, minek az?
Az, úgy van, ha viszonylag sok Z mozgásra számítasz, és/vagy kicsi munkaterületre.
Akkor, mindenképp a dinamikát kell előtérbe helyezni. Itt nincs értelme sebességet hajszolni. Sőt …
Ha, sok egyenes mozgásra, és/vagy nagy munkaterületre. Akkor érdekes a nagy sebesség.
Ezért, fontos kiinduló pont a gép méret, és megmunkálási cél. A hajtás meghatározásakor.
De, ugye, ha már megvan a cucc, akkor azzal kell balancírozni.
Neked, nagyon hasznos lenne egy csökkentő áttétel. 2:1 vagy 1,5:1 arányba.
Hány Amperes a motorod?
Mert, ebből van többféle.
Na, ez még az a méret ahol, nincs túl nagy jelentősége az üresjárati sebességnek.
A dinamikus mozgásnak viszont igen.
Persze, fog működni 1-1 ben is. De, ezen a ponton már nem ugyanarról beszélünk.
Igen, ettől tartottam. A 4,2 A.
Így már nem annyira jó a vezérlő, motor, párosítás.
Érzékelhetően jobb lenne a 80 voltos vezérlővel.
Vagy a kisseb áram igényű motorral, ez a vezérlő.
Persze, fog működni, rendesen. De, a különbséget, próba után látnád.
Na, ez a méret már határeset. Ennél már, inkább a végzendő munkák a meghatározóak.
Vegyes használatra, jó lesz az 1-1 is.
Egyesek, ezt is túl spirázták. Mint mostanában ezen a fórumon sok mindent.
Nehogy azt gondoljátok, nagy előrevivő volt a kötözködésetek.
A gyereket is lehet, úgy tanítani, ha nem tud valamit, jól nyakon vágom.
Vagy van a nehezebb módszer: Neki állok, és elmagyarázom.
Itt, inkább a lehülyézés a menő.
Én, se azt kérdeztem amit ………..
Hanem, azt szerettem volna, ha tiszta lesz mindenkinek, mi mit jelent.
Mert ugye a gépi l =L Na, és az 1=egyes. Az, tök ugyanúgy néz ki.
Mire gondoljon a nem értő?
De, valamiért, pont az, aki azt gondolja, ő terjeszti a világosságot, az vágja nyakon a gyereket.
Én, viszont azt gondolom, nekünk, mindanyiunknak figyelembe kell venni azt, hogy sokan vannak közöttünk, akik, közel sem ismerik a mérnöki számításokat, és azok újabb jelöléseit.
Na, ezért kellene közérthetően, vagy időnként elmagyarázva, írni. De, hogy számoljon az aki nem tudja, 10 el vagy százzal kellene számolni.
Tibor45 –öt nem megbántásként említeném, mint rossz példa. De, bizony ő sokszor, szándékosan, vagy nem, de úgy ír, hogy az olvasó 5 százaléka érti. Vagy az se.
Na, ez, nem a HOBBY CNC.
Itt a jobb pofám, lehet csapni!
Na szia! Ez azt jelenti, PÁ!
Ja, bocs ez is elavult, velem:))
Állati nagy szerencséd van mert elszállt egy 500Gb--os HDD-m és így szinte minden oda lett.
Viszont ezt teljesen véletlen megtaláltam egy másik adat tárolón.
Átküldöm neked.
Vannak már olyan vezérlők is amik még enkóder nélkül is tudják ezt.
Ha már enkóder van a léptetőmotoron akkor meg lehet olyan vezérlőt is választani amivel már szervóként működik.
Az igaz az ilyen vezérlők még erősen zsebbenyúlós dolgok.
Majd kíváncsi leszek mire jutsz vele, de a zavarvédelemre szerintem erősen figyelj.
Te is tudod jól hogy ilyen kis fordulaton nem lesz lépésvesztés [#papakacsint]
Mindig a nagyobb fordulatoknál kezdődik a probléma.
Ha már 300RPM alatt hibázik a motor akkor ott valami nagyon el van méretezve.
Na igen ez egy ilyen hamis biztonságérzetet ad.
Esetleg, ha erre járnál akkor hozzád vágok egy omron 1000-es enkódert, de csak egy feltétellel !
Hogy soha többet vissza nem hozhatod. [#hehe]
Most néztem van rajta egy műanyag kuplung meg egy gyári felfogató lemez.
Egy két tengelyvéges motorra seperc alatt fel lehet dobni.
Mondtam ha erre jársz.
Sajnos már befejeztük alattatok elterülő részen lévő cementgyár gyengeáramú kivitelezését, így azt se mondom hogy elugranék bedobni.

Van egy ilyen motorom. Erről hogyan lehet kíméletesen lehúzni a bordáskereket? Csapágylehúzó sajnos nem fér alá.
Köszi a tippeket!
A motoron ha fém a kerék és semmilyen rögzítés nincs rajta akkor meg kell melegíteni hogy a ragasztó elengedje.
Viszont ha sajtolva van akkor csak a nyers erő segít, de semmi esetre ne üssed a tengelyt !!!
Alapból természetesen NEM működik a mach3-al !
Ehhez kell egy Step dir +10/-10 voltos átalakító
Tehát még rá kell költened úgy 20-25 ezer forintot és akkor lehet belőle csinálni egy hasonló rendszer mint itt a videón is látható.
Ezután természetesen kompatibilis is lesz a szoftverrel.
ITT a VIDEÓ !!!
Bal oldalt hagyományos nyílt hurkú léptető vezérlő látható míg a jobb oldalon egy zárt hurkú rendszer.
Szemmel látható a különbség , sőt zongorázni is lehetne! [#hehe]
Legrosszabb esetben lebombázod a motor végéről a vezérlést és csak a csupasz motor használod egy Leadshine MSD vagy MSDD vezérlővel.
Ha még nem beruháztál ebbe, akkor inkább ebből a pénzből vegyél a T2CNC-nál motorokat és vezérlőt.
Drágább lesz, de azt legalább tudod használni.
Kösz az infót!
Főleg az érdekelne hogy az encodert mint egy szervó használja, vagy mint egy mankó működik az esetleges hibák kiküszöbölésére.
Magyarán a mikrolépések ellenére a felbontás az encoder felbontása marad, vagy a vezérlő csak nagyjából a hiba kiküszöbölőként használja ?
Egyszerű kideríteni hogy szervó üzemmód működik vagy sem.
Erőszakkal mint a #3915 hozzászólásban látható videón tekerd el a tengelyt.
Ha nem történik semmi akkor nem megy ha visszateker akkor van valami.
A valami alatt meg értem azt hogy az elkóder felbontása között visszateker.
A konstruktőrök hasomlóan gondolkoznak mint én, józan paraszti ésszel, akkor utána újra beállítaná azokat a áramokat a tekercseken mielőtt az utolsó step és a hiba jel között érkezett.
Így ugyanabba mikrolépésbe térne vissza, az enkóder meg megadja melyik 200 egész lépésben volt ez a mikrolépés.
De én nem érthetek ehhez [#hehe]
Ígéretesnek tűnik a dolog, de itt csak az az egy kérdés hogy szökik el az erő a motorból a fordulatszám növekedésével ?
Mert ha a nyomatékét képes lenne 3000RPM-ig megtartani akkor simán versenytársa lenne az AC szervó hajtásoknak.
Ezt viszont kétlem mivel a léptetőmotor a kialakításából adódóan képtelen a nyomaték tartásra nagyobb fordulatszámon.
Ez a nyomaték görbe után lehet hogy könnyelmű kijelentés volt az hogy versenytársa lehet az AC szervóknak.
Sajnos az encoderes visszacsatolás se tud csodát tenni a léptetőmotorral.
Lehet hogy A BLDC irányba kellene kacsintgatni lineáris nyomaték ügyben.

Nyugodtan hallgathatsz a logikádra.
Ez így logikus.[#nevetes1]
És, az hogy van?
Azért csak nézd meg a bekötésének helyességét. És, szakadásra is vizsgáld meg.
És, ha használhatatlannak bizonyulna. Még akkor is hasznosítható lesz az őszi, hatvani talin.
A második léptetőmotor célba dobó versenyen.
Addig is gyakorolhatsz vele:))
Ne alázd meg, a kukába dobással.
[#nemtudom][#wave]
Igen, ott a pont !
A legjobb kivezetni minden tekercsvéget és így lesz 8 szál vezeték amit tetszés szerint lehet kötni unipoláris, bipolárisan, sorosan, párhuzamosan.
Mondjuk az használható méretű motoroknál ez alap opció.
Szerintem semmit nem csinálsz rosszul, csak ezek ennyit tudnak.
Folyamatosan pörgetve nekem is forróak lettek a motorok annak ellenére hogy minden a gyári adatok szerint volt beállítva.
Szerintem, egészen jól egybe van ez a gép. Abból ítélve, amit lehet látni, képeken, videón.
Valószínűleg, „csak” beállításilag kellene gatyába rázni, szoftverileg, és esetleg vezérlésileg is.
Első lépésben, vedd vissza a gyorsítást, lassítást.
Esetleg, megnézhetnéd a motorok vezetékeiből nincs e valamelyik meglazulva.
Ha, közelebb laknál, rendbe raknám.
Óóó, bocs, hogy beleszóltam, Természetesen, nem muszáj nekünk beszélgetni.
Kiléptem a témából.
Na, jó. Akkor fussunk neki mégegyszer:))
Írok a levedre választ.

Majdnem ugyanilyen,és van dupla ilyen hosszú is.
Magánlevelezésben, megkaptam a „gép” adatait, képeit. Ezeknek utánajárva, számolgatva, és a tapasztalataim felhasználásával.
Megadtam, a körülményekhez képest, lehető legjobb választ, tanácsokat, beállításokat.
Remélhetőleg ennek felhasználásával, és eredményeként működőképessé válik a gép.
Kulcsár Zoltán!
Annyit mondhatok, Az összes hiba okozója, az átgondolatlan, inkorrekt megépítés.
A hozzá képest, aránytalanul nagy elvárás.
De, mint tudjuk, Trabanttal nem lehet Forma1 –et nyerni.
Egy esetben lehet...
Ha az összes induló....Trabantos.:))

Ha, jól emlékszem, ezt már kérdezted párszor. Mindig az volt a válasz: Nem!
Most is az: Nem lehet.
Jól megválasztott motor, vezérlő, és beállítás a megoldás.
Soros kötésben nagyobb fordulatot tudsz elérni. De lényegesen gyengébb lesz a motor.
Én, kevés kivétellel, párhuzamost alkalmazok.
Tudod, statisztikával, és grafikonnal mindent el lehet adni.
Csak nem mindenkinek?))
Véleményem szerint, a paralel, 68 volton tovább tartaná a jobb nyomatékot.
Az, az, nagyobb fordulattartományba lehetne dinamikusabban használni.
Nekem, több motorral való kísérletezésem ezt mutatta.
A feszültség, átütése szempontjából teljesen mindegy, soros vagy párhuzamos a kötés.
Nyugodtan járathatod 60 voltról a motorod.
Az átütési feszültség 100 volt fölött van, egészen biztosan.
Az isten se tudja, mikor, miért úgy tesztelik a motorokat, ahogy.
A grafikon, csak irányadó. Következtetések levonására. Nem szentírás.
Nyugodtan nyomd rá a hatvanat. Olyan nincs, hogy 48 még biztosan jó, hatvan meg átüt.
Ha, átüt 60 –on, akkor, 48 -on is, hamarosan. Az átütés, biztosan nem lesz gond. Ha, nem selejt a motor. Akkor, pedig ha selejt, mindenhogy rövidéletű lesz.
Azt így nem tudja sem a Kínai, se más elkészíteni. A tűrések, ettől sokkal messzebb vannak. Még náluk is.
Igen, arra figyelj, hogy a vezérlő magasabb feszültségű legyen, mint amivel járatni akarod.
Már tapasztaltam kisebb(Nema17)motoroknál is ezt a jelenséget.
Szinte mindig,a helytelenül megválasztott/beállított motorparaméterekre vezethető vissza.
A leírás szerint,igen.
A második oldalon írja:
- Tengelyenkénti trimmeres motoráram beállítás,
- 0.1A - 4.7A /fázis motoráram szabályzási tartomány, konstans motorteljesítményre,
- Maximális motor tápfeszültség: 50V,
A hatodik oldalon,...a motorod bekötése.


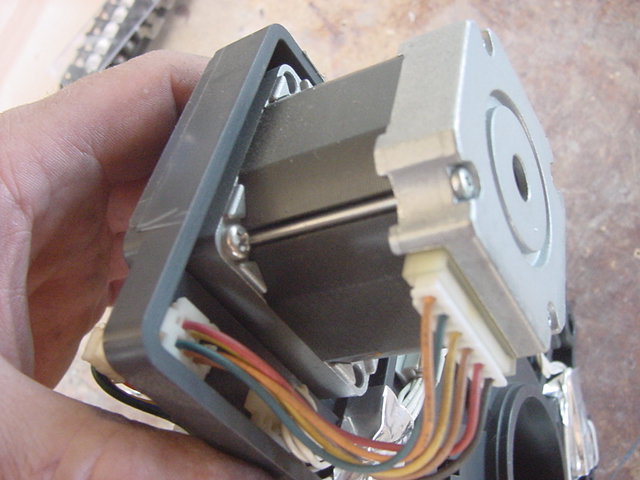






6 vezetékesek , általában 1N, NEMA 23 , a tengely mérete 6,35 ha jol tudom....
1500/db
A kis VEXTA NEMA17-esek is sikeresen átköthetőek nyolc kivezetésesre.
Meg is történt.:))
A képeken,még az eredeti,hat kivezetéses állapot.

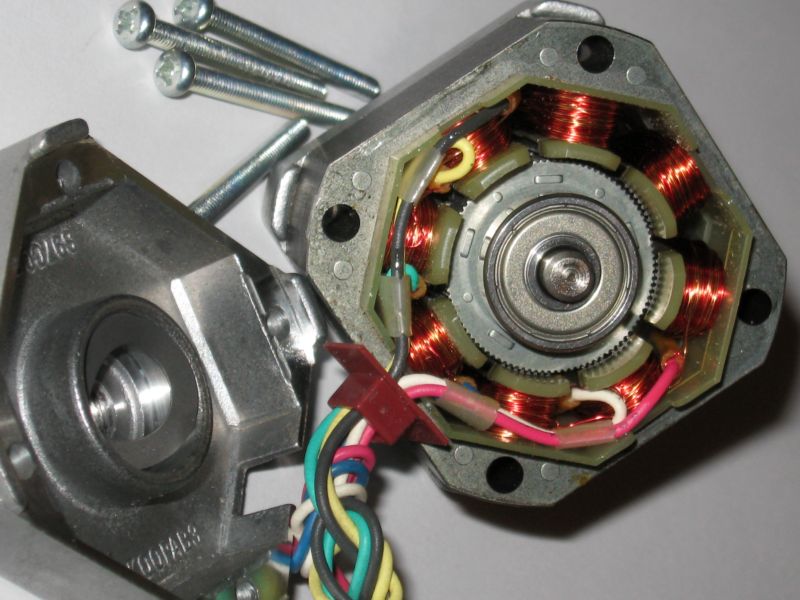
Mach-ban van olyan lehetőség a kimenetek között, hogy Enabled.
Ezt állítod be az adott kimenetre akkor a reset gomb benyomásakor aktiválod vagy deaktiválod a vezérlőt.
Így a monitoron is láthatod mikor aktív.
Szerintem sokkal kulturáltabb lenne mint a mostani megoldás.
No,akkor már teheted is a gépre az én példányomat!
[#eljen]
Ne viccelj már !
Kifog egy olyan minőségi kábelt ami fali UTP és alumínium rezezve, azzal lexopja magát 2x !
Múltkor beleszaladtunk egy ilyen csodálatos utp kábel vásárlásba.
Mondanom se kell, hogy jó pár kilométert kihúztam UTP kábelből minden probléma nélkül, csak nem ebből!
Ez a csoda kábel 3 hajtás után legalább 2 ér törést produkált.
És a legszebb, hogy olyan csomagolásban és áron kaptuk mint a 100x jobb minőségű réz társát.
Tehát ha nem akar szívóágra csapódni akkor 90FT-os utp helyett választ egy 140-es 4x0.5 MTK-t és kész.
Ugye ez nem akkora árkülönbség mint amekkorát szívni lehet vele.
Hol laksz ember ?
Itt ebben a porfészekben kapásból 4 elektromossági szaküzlet van 5 km-en belül.
Ebből 2-ben akkora készlet van, hogy nehéz olyan kábelt mondani amit nem tudnak azonnal, vagy délutánra kezedbe nyomni.
Legrosszabb esetben másnapra, ha nem reggel 10-ig esel be hozzájuk.
Egyedüli kizáró tényező a rá szánt keret lehet. [#papakacsint]
Mivel nagyobb a feszültség így előbb alakul ki a mágneses tér a tekercsben vagy ahogy írod meredekebb az áram felfutása.
De ha csak a mezei 5.-es fizikánál maradunk magyarázat tekintetében, kétszeres feszültség ugyan akkora áramnál az kapásból kétszeres teljesítmény növekedést jelent.
Viszont akkor az a vezérlő nem áll annyira a helyzet magaslatán ha ezt a feszültség növekedést már nem tudja a PWM kitöltés csökkentésével kompenzálni.
Másrészt nem mindig jó a túlzott feszültség növelés mert az áram lecsengés is lehet káros ha az már beindítja a szupresszort.
A keletkező áramlökések a Lenz-törvény szerint az őt létrehozó hatást akadályozni igyekszik, vagyis az áram kikapcsolásakor igyekszik fenntartani azt.
Hasonló jelenség figyelhető meg bekapcsoláskor is, csak akkor az indukálódó áramlökés ellentétes az áramforrás áramával.
Lehet páran szórakoztak azzal, hogy egy relére úgy kötöttek 9 voltos elemet, hogy az úgy működjön mint egy csengő és a tekercs kivezetéseit meghosszabbítva levezették a készüléken és ezt hanyag eleganciával átdobták valakinek aki el is kapta [#hehe]
Az megtanulta egyből mi az a Lenz-törvény mikor a tekercs próbálja fenntartani az áramot ami csak úgy lehetséges ha a feszültséget a végtelenhez próbálja emelni.
Kezdők mikor megépítik az első relés elektronikus kütyüjüket, és hát minek is tegyük bele azt a visszacsapást védő diódát a relé lábai közé mert az drága.
Na ilyenkor van az a bizonyos első és egyben utolsó kapcsolása az áramkörnek [#hehe]
60 voltnál ez akkor 117 volt és általában a 90-nél indul a szupresszor ami már káros lehet a motor sebességére.
Igaz ezeket a leadshine vezérlőket nem veséztem ki, de van itt belőle és úgysem használok léptetőmotort, majd jól kibelezem megnézem, hogy védekezik [#hehe]
De ki beszél itt a táp oldalról, a tekercs oldali fezsültség lökésekről volt szó.
Érdekes lehetne, válasz szempontjából. Ha beírnád a Pololu paramétereit.
Mivel, azt sokan nem ismerik.
Pl. Menyi annak az alsó feszültséghatára?
Az, hogy nema 17, vagy nema akármennyi. Nincs jelentősége. Az, a motor, felfogató méretét jelöli.
Szerintem, neki is érdemes lenne egy gépépítős topikot nyitni.
Kiélhetnénk, összes segítő anbiciónkat.
Jaj, ne viccelj már:))
Annyi mindent lehet hajtani 1 adapterrel is, ami 0,5 Amperos.
Az unokám, 6 libát hajtott 1 ilyen adapterrel.
Az adaptert fogta, a zsinórját suhogtatta. A libák szaladtak.
Szerintem legalább 5 ezerrel mentek a libák:))
Ráadásul, 6 darab.
Tudom, hogy hihetetlen, de igaz:))
Csak, számolj utána:))
Átmérő, szorozva Pi –vel.
A fel sem tett kérdésre pedig az a válasz:
Ha, az eredmény 100 –at osztod a fordulatonkénti lépésszámmal. Akkor megkapod az egy lépésre eső, megtett utat.
Az, az, a felbontást.
„Gyakorlatban ezt hogyan csinálod ? Leirnád pontosan hogy miböl derül ki hogy egy szijkerék egyköréhez hány motor lépés kel ?”
Először is, örülök, ha pici gondolkodás után válaszolsz a beírásomra. Pont így vagyok mással is:))
Ugyanúgy csinálnám, ahogy rólad feltételezem.
Mivel, azt tudjuk, mennyi lépés kell a motor tengelyének egy fordulatához.
Pont annyi kell a tengelyén lévő tárcsának is.
,,,,,,,,,,,,,,,,,
A szíjkeréknek nem kell semennyi lépés. Az annyit kap amennyit adnak neki:))
Látom, nem hiába gondolkodtál a válaszon.
Mindenféle, környezetéből kiragadott részekkel. Sikerült úgy kikavarni, valahogy kijöjjön. Hülye vagyok a CNC –hez. A működése meg annyira távol ál tőlem, hogy távcsővel se látom.
Jó, bevált recept. Már használtad máskor is. Ezt, a kavarás technikát.
Na, a továbbiakban ebbe a bujtatott hülyézésbe, nem veszek részt.
Mert ugye, mindenki tudja. Az ominózus részben, a fogasszíj egy lépésre eső, megtett útjának kiszámolásáról beszélek.
Az, az, a felbontásról.
Igen, alakul.
Ez is egy jó taktikának látszik. Amit mostanában nem először tapasztalok.
Mindenféle kavarásokkal elvenni a kedvem a segítségadástól.
Ha, beválik, szépen kiesek a tudatból. A régi dolgaimra meg a kutya sem emlékszik már.
Azonnal igazolódik az, amit, kezdenek tolni a kedves „barátaim”.
Mindig csak a levegőt rontottam. Semmi hasznosat nem tettem a közösségnek.
Ezért semmi keresnivalóm itt a fórumon.
Szép kis történet.
Na, ezzel itt az offolást bezártnak tekintem.
Utóiratként csak annyit. A kérdező rögtön értette miről írtam. Minden, csűrés, csavarás nélkül.
Első blikkre a mérete alapján a felére tippelném a nyomatékot.
Legalább is amit a t2cnc-nél vettünk 12Nm-est az jóval méretesebb volt.
Mert úgy emlékszem az nem 32 hanem NEMA42 méretű.
Mellesleg mihez kell ekkora nyomaték, mert egy kis alu vázas gépet úgy szaggatná szét mint üzbég paraszt a tangóharmonikát. [#hehe]
Olvassátok már el azt a qrva leírást,amit a gyártó 'anno mellékelt minden példányhoz!
© Amatőr,már linkelte a #4404-ben.
Pld. a motortápra azt írja,hogy:
"Maximális motor tápfeszültség : 50V,"
Történt olyan amire konkrét példa is van, hogy a motor tengely és a forgórész kezdet külön életet élni. (nem xar kínai, hanem egy Bautz motorral)
Amúgy meg a szakszerútlen szerelésből is adódhat motor gyengülés ha valaki állat módon felkalapálja a tengelyre a tengelykapcsolót.
Lehet nem azonnal ,következik be csak idővel szépen az elrepedt mágnesgyűrű szétrázódik így a mágneses tér elmegy manituhoz az örök vadászmezőkre.
Csatlakoznék Szalai György hozzászólásához a megfőzés gyanús motorhoz, mert ha kicsi a motor akkor adjunk neki áramot hagy égjen a zsír ahogy Rubint Réka is mondja [#hehe]
Ritka földfém alapú mágnesek (Nd2Fe14B) 80 °C körül már erősen kezdenek veszíteni a mágnesességükből.
És nem kell, hogy elérje ezt a hőmérsékletet, de ha évekig ennek a közelében van járatva azt nem fogja megköszönni!
Mellesleg nem csak a motor lehet a hiba hanem a karbantartás és a porvédő burkolatok és elszívás akkut hiánya is!
Mert a por bemegy mindenhova, megül a tengelyeken és gyönyörűségesen összegyűjtik a csapágyak a golyós vagy sima anyák.
Gondolom a többit nem kell magyarázni.
Ezért írtam mint lehetséges tényezőként a por bejutását az olyan helyekre ahova nem kellene.
Léptetőmotor vezérlésnél meg nem fogod észrevenni a terhelt vagy a szabadon futó motor áramok közötti különbséget egy multiméterrel.
Igen és terhelésre volt változás ?
Mert szinte elhanyagolható a különbség a terhelt és terheletlen motor áramfelvétele DC oldalon.
Profi 1-nél azt állítottad be, hogy az a csodás 400Hz-en azaz közel a zenei "A" hangon üvöltő PWM ne égesse szénné az aranyáron beszerzett NDK-s nyomtatómotort.
Talán még a hangoló szoftver is megvan valahol :)
De ez egy letűnt kor kezdeti időszakából való visszaemlékezések !
És mielőtt belekötne valaki a normál zenei "A" hang az pontosan 432Hz.
Bocs, de a képét se kívánom még a hátam közepére sem, "elmúlt, szép volt, köszönöm ennyi !" ahogy a Rapülök egyik számában is elhangzott.
És ezt a hangot képzeld el mikor a Profi 1 emelt feszültségű és áramú vezérlőjével 12 Ampers fázisáramok mellet 6.4Nm-es motorokkal KB 4-5m2 rétegelt lemezzel burkolt fémvázas asztalon keresztül erősítette fel.
A szomszédból átjöttek, hogy most már fejezzük be mert nem tudnak aludni. [#hehe]
Két 40cm-es főfalon keresztül lehetett hallani.
Egy nagyobb melónál egy levél szedukszen és egy tálca sör elment mint védőital [#csodalk]
Szerinted miért utáltam meg egy életre a léptetőmotort mint szót is ?
És akkor mondják hogy elfogult vagyok.
Az ilyennek nem kívánnék mást csak egy 5-8 órás melót álljon mellet végig egy ilyen gépnél.
Kicsit több infó kell például a mechanikáról az 1 lépésre megtett útról, mert így csak találgatni lehet.
Van hozzá unipoláris vezérlőd is ?
Sajnos bipolárisan ezen csak sorosan lehet kötni a tekercseket így a feszültsége magasabb lesz az elérhető nyomaték / fordulatszám görbe pedig laposabb.
Amúgy Google a barátod !
Cikkszám alapján van némi esély megtalálni az adatlapot.
Általában az unipoláris és bipoláris hajtás között ugyanannál a motornál kb 30-40% nyomaték növekedés érhető el.
Pontosabban bipoláris hajtásnál 100% a nyomaték unipolárisban ennek a 60-70%.
De attól függetlenül ezek a motorok a bútorlapos gépek színvonalához valók.
Ettől nagyobb motorokat is ajándékoztam el mert nálam ez játék vagy beugró szint, más meg őrül neki.
Ilyenért nincs pofám pénzt kérni !
Száz szónak is egy a vége, akármilyen kombinációban is kerestem ezeket a motorokat sajnos a Google nem akart segíteni.
Találtam egy hasonló motor ugyanettől a gyártótól amiből kiderült pár dolog.
KH56 a típus jelölésben a pajzs méretet takarja milliméterben
L erre nem igazán derült fény talán a két tengely kivezetés.
M2 hogy 2 fázisú
04 a nyomatékot adva meg x10 azaz 40 gf*cm
9 padig a feszültségre utalhat.
Sajnos többet nem tudtam kibányászni Google barátunktól
Megvan a tuti !
HK = 2 fázisú
54 = pajzs méret mm-ben
L = motor hosszának a mérete E=20.8mm F=27mm G=31mm H=34mm J=40-42mm K=50-54mm Q=76 de sajnos L nincs.
M = HB motor azaz hybrid
2 = lépés szög 06=0.6fok 1=1.2fok 2=1.8fok 4=3.75fok/lépés
049-re nincs magyarázat de ez adná meg a tekercs elrendezést és a feszültséget, áramot.
Ez valami egyedi széria esélytelen adatlapot vadászni hozzá !
Ha legalább a tartó nyomatékot lehetne tudni 100%-ra akkor egy labortáppal és egy tárcsával némi madzaggal és megfelelő mennyiségű például vízzel meg lehetne állapítani a feszt és áramot.
Lehet agyalni mégis ezekkel hogyan :D
Ha tudná az ember a nyomatékot akkor tesz rá egy tárcsát teker rá némi madzagok pet palackba megfelelő mennyiségű víz hogy meglegyen az adott sugáron a tartónyomaték és labortápon adni naki a feszt.
Mikor már pont megtartja akkor leolvasni a áramot és feszültséget.
Csak sajna ennél a motornál ez egy nagyon sok ismeretlenes valamiről beszélünk.
Ez a hőfokos megoldás is csak ilyen saccográfos valaminek jó.
Volt egy frankó Napirajzos karikatúra erre, de sajnos nem találom.
Most már csak azért is megkerestem a poént :)
Ez a hőmérséklet méréses dolog pont ennyire lenne pontos :D LINK
Általában az ilyen motorok egy cégnek készülnek valami gyártmányba speciális vagy egyedi paraméterekkel PL nyomtató,ATM pénzadagoló, stb stb.
Leleményes hobbys kibontja és akkor keresek meg még is mit tud, de sajnos ezeket a egyedi dolgokat nem teszik közzé.
Van egy régi haverom Ő kimondottan csak ipari elektronikával foglalkozik profi szinten (PLC AC szervó...)
Sok éve beleszaladtunk egy DR2-es AC hajtás szériában amiinek az egyik csatlakozója eltért a publikus adatlapon közzétettől.
Haver perfekt angol tudásával írt is a Yaskawának hogy tudnának küldeni valami mankót ehhez a szériához ?
Finom szólva elhajtottak mint a magzatvizet mivel ezt csak egy cégnek gyártották és övék az egyedüli jog a dokumentációra.
Pedig a japcsik nem csinálnak ilyet, minden doksit megosztanak.
Visszatérve a léptetőmotorra, mindegyik adatlapon a csak Holding Torque van feltüntetve, ezért se értem mi a francot is gondoltak.
A kötözködésre visszatérve mindig is voltak viták, de ez egy szakmai fórumon szinte elkerülhetetlen, de ez amit tibor csinál a személyem ellen irányuló lejáratással kapcsolatban ez már tűrhetetlen !
Ajnározza a dos-os hajtásvezérlőjét ami megvásárolva kap az embert egy korlátozott valami.
Tételezzük fel kell egy plusz tengely mivel bejött egy olyan meló amit forgatni is kell és csak X Y Z-re vásároltam meg a jogot.
De sajnálatos módon a delikvens elhunyt, ilyenkor mégis mit tudok csinálni, van tovább aki folytassa ?
Ezt megkérdeztem tőle erre a igen csak beszűkült tudata elborult és habzó szájjal mindenféle a valóságot köszönő viszonyba se állító alaptalanságokkal dobálózott sértegetett.
Mikor mondtam neki hogy bocsánatot kéne kéri még ő gúnyoskodott.
Ezt személyesen csinálja meg az a minimum bárkitől, hogy felpofozza!
Kevés a motorod tartóárama.
Ez még önmagában,nem biztos hogy hiba.
Alkalmazásfüggő is lehet.
Nem egyedi probléma ez a tengely leválás !
Tegnap került hozzám egy zsír új HY-DIV268B-5A típusú vezérlő.
Mindenek előtt szétszedtem és megnéztem mennyi paszta van alatta. (mutatóba volt alatta valami olajos akármi)
Csodálatos belvilágról néhány kép


Miután tettem alá normális pasztát, próbálgattam egy USB-s mozgásvezérlővel, és egy Kenwood Labortápról hajtva.
Körülbelül 15-20 percet működött is aztán a labortáp leült mivel az áramkorlát meghaladta a maximálist. (ergo zárlat)
Ez is elfingotta magát semmi előzetes jelenség nélkül, még langyosnak se volt mondható.
Erre mondjatok valamit ?
Még annyit az előzőhöz, stabil 36 Voltról lett tesztelve egy 2.5 Amperes fázisáramú motorral.
Tehát még az se mondhatnám hogy határértéken lett járatva.
"Erre mondjatok valamit?"
Hát...
Így jártál!
Hiba volt szétszedni/összekenni.:(
Nincsenek ezek a "normális pasztához" szokva!!!
Nekem,a H2-esem évek óta szárazon,paszta nélkül megy.
A "gyártó" nem tartotta fontosnak,hát én se tettem.
[#nevetes1]
A H2-ben nem is ilyen IC van (TB6560)
Ebben a fostalicskában meg TB6600. 48 volt 5 ampert tudna.
Ahhoz képest 36 voltnál és 2.5 Ampernél elment az örök vadászmezőkre kapálni.
És nem az első ilyen eset !
A hővezető pasztával meg biztos nincs gond mert ettől sokkal jobban disszipáló alkatrésznél is megfelelt.
Legutóbb ezt a típust teszteltem: Leadshine-AM882.
Az összes előző léptető vezérlők elbujdoshat szégyenében ez mellet.
Még a hangja is más a motoroknak tőle.
Ahogy Svejk mondaná, Tisztább szárazabb érzés !
Meg is kell fizetni az árát mert 25,000 körül ér ide, de az érzés megfizethetetlen ! [#nevetes1]
A TB6600-es IC meg saját magát fingatja ki a nem megfelelő impulzus szélességgel való meghajtás miatt.
Más magyarázat nincs erre.

Tényleg lehet valami ebben az IC hamisításban.
Toshiba rádiófrekvenciás FET-el jártam így, hogy a megadott paraméterek közelébe se tudott eljutni.
furcsán is nézett ki a tokozás és kiszerelés után szinte 0 erőbehatásra ez lett belőle.
Egy félbetört karrier képe :)
Sajnos a fényképezőgép lencséjéhez hozzáért és így a pár milliméterre lévő dolgok már elmosódott lett.
Lényegen nem változtat ami xar az az is marad akármit tapmóznak rá.
Ma nem csináltam újabb kísérletet, mérést, mert T45 kissé elvette a kedvem, de arra azért rájöttem, hogy a tegnap mért start-stop frekvencia nem másból adódik mint a motor mechanikai (és elektromos?) időállandójából.
Gépre felrakva ehhez hozzájönne a mechanikai konstrukciótól nagyban függő plusz időállandó.
A tegnapi kísérletben ugye az első esetben amikor 0-ról gyorsítottam egységugrásszerűen, akkor 2,2 kHz jött ki.
Azt elfogadhatjuk alapelvnek, hogy motor lépésvesztés nélkül csak úgy tudja ezt lekövetni ha már az ELSŐ LÉPÉSNÉL ELÉRI ezt a 2,2 kHz által előírt sebességet, és ez nem más mint a start-stop freki, vagy visszaszámolva a 400 lépés/fordulattal 0,45 ms-os léptetési frekvencia azaz ennyi az időállandója a motornak.
A fentiekből adódik, hogy az a motor üresben 330 ford/perces sebességre tud felgyorsulni már az első lépés alkalmával és ha a G kódban ez a sebesség érték van megadva akkor ezzel tartósan megy is.
(itt képbe jöhetne a múltkori Békésivel való csevegésünk)
Persza a tegnapi kísérletem második fele rámutatott, hogy nem ilyen rózsás a helyzet mert pl. ha hirtelen irányváltás van akkor rögtön a felére lesett ez a lépésvesztés nélküli frekvencia.
Ezen kívül még vannak rezonanciák is amik szintén csökkentik ezt az értéket.
Hidd el nem kötötted el, ez ennyit tud , de stabilan !
1500+800Ft posta vagy 2700FT Free international shipping.
Tehát NEM rentábilis, mert 3555Ft-ér postával itt van egy ilyen vezérlő és nem kell szívni az azonnal szétégő nyákkal se.
Nem szabad megvenni mert egy hulladék, de akinek kell a tanulópénz az vegye nyugodtan.
Ez a HY-DIV268N-5A vezérlő egyszerűen vagy ennyire használhatatlan vagy a kínai már a saját igénytelenségét is hamisítja.
Valaki váltig állítja, nála tökéletes, az én és többek tapasztalata pedig az, hogy egyszerűen a töredéke áramnál is megdöglik.
Mindenki döntsön saját belátása szerint.
Például nekem :)
Azzal kerestük a földben lévő csövek nyomvonalát.
Egy kis 100 Wattos frekvenciaváltóval meghajtottam egy biztonsági trafót a vízóránál rá lett téve a szekunder egyik vége a kerti csapnál a másik 1.5 Hz-el hajtva szépen jött a cső fölött a PWM frekvencia a Sokolon.
De erre építtettem már egy pofon egyszerű áramkört ami egy 9 Voltos elemmel ugyanezt csinálja :)
Nem a Sokolt váltottam ki hanem a frekiváltó trafó kombinációt :)
A Sokol felülmúlhatatlan ha zavart kell össze szedni :D
Leadshine AM882 vezérlő tud visszajelzést küldeni a lépésvesztésről.
Ha ellép akkor nyom egy E stopot aztán ennyi, már ha be van kötve a stopkörbe :)
A normális encoder visszacsatolású "léptetőmotor" vezérlő meg nagy ívben tesz jó magasról a motor lépéseire. (felbontás a enkóder felbontása lesz )
Ezeknél már szervó rendszerről beszélhetünk mert a léptetőmotor mint végrehajtó egységként van jelen a rendszerben.
Tehát mint egy brushless motoros szervó lenne és erőszakkal kitérítve vissza fog ugrani az eredeti pozíciójába.
Egy kis demo Videó Link ITT!
Jó vezérlőnél nem is kell visszacsatolás maximum a E stopon keresztül.
Több lenne a nyűje mint a haszna, ha hiba van lője ki a programot és kész.
Míg a vezérlő gondolkodás nélkül végrehajtja a program dolgait addig a lőtéri kutyát se érdekli ez program vezérlő hurok alkotás.
Csak nézz meg egy régebbi Fanuc rendszert !
Az országban egy kezemen meg tudom számolni akik VALÓJÁBAN értenek hozzá.
Akkor majd a egyszerű hobbis akinek az is problémát okoz, hogy az AM vezérlőt beiktassa a stopkörbe pont egy ilyen agyonbonyolított valamit akar majd ?
Mellesleg nem biztos az hogy sokkal el vagyunk maradva, mert nézd meg a Mach4-et.
Az már tud modbus vezérlést is és annál meg kétirányú kommunikációt alap feltétel.
Így az eddig úgymond használhatatlan vezérlők is lehet hogy egyszeriben használhatók lesznek.
Tehát nem kell fejlesztgetni mikor már rég van kész megoldás :D
Szerintem ennek az enkóderes léptetős rendszernek semmi értelme a szokásos felhasználásban.
Amit lentebb írsz, hogy gyorsítani szeretnéd a plazmádat, arra biztosan nem ez a megoldás.
Ha, gyorsítani akarod, akkor erősebb léptetőmotos, gyorsító áttétellel. Vagy szervó rendszer.
A léptetőmotoros rendszert nem úgy kell elképzelni, hogy az állandóan azon töri a fejét, hogyan tudna lépésvesztést okozni.
Ez, egyáltalán nem így van. Ez a hajtás is kb. olyan, mint a többi. Ha, jól van méretezve. Összerakva akkor jól működik. Ha, nem akkor hibázik.
Pont annyira fog hibázni, mint a gép tervezője, építője.
Ha, megakad, akkor megakad az enkóderes is. Ezen nem segít 5 enkóder sem.
Hiába próbálkozik, bepótolni a lépésvesztést.
Szerintem, csak speciális esetben van, lehet némi értelme az enkóderes léptetőnek.
Egyébként fölöslegesen bonyolítja a rendszert. Ennek megfelelően, fölösleges pénzkidobás.
Használok, szervós rendszert is, és léptetőset is. Mindkettő tökéletesen teszi a dolgát.
Komolynak mondható fémipari CNC gépem is léptetőmotoros rendszerrel dolgozik.
Hibázás nélkül, pontosan dolgozik évek óta.
Én is elgondolkodtam az enkóderes használatán. De, mindig arra jutottam, hogy számomra semmi előnye nem lenne.
Persze, nem tudom miért esett az enkóderesre a választásod.
Azért, csak gondold át logikusan.
Nem akarlak lebeszélni róla. Legalább, beszámolsz a tapasztalataidról.
Persze, még érdekesebb lenne, ha te tudnád összehasonlítani enkóder nélkülivel.
Én a trafós megoldást részesítem előnyben. Kevés alkatrész kevés hibalehetőség.
Egy trafós táp tud rugalmasan működni. Ami jól jöhet bizonyos esetekben.
A trafós tápot elég a várható összes áramszükséglet kétharmadára, háromnegyedére tervezni.
A kapcsolóüzemű tápot ajánlott legalább 100 százalékra tervezni. Mivel teljesen rugalmatlan.
Meg is viccelt már pár hobbystát. Nem találják, mi lehet a gond.
A stabilizálásra semmi szükség. Sőt, akár hátrányos is lehet alkalmanként.
A kapcsoló üzemű tápból kijöhetnek zavaró jelek is. Ami lépésvesztést okozhat.
Én már találkoztam ilyennel.
Persze, az is igaz. Több olyanról is tudok, ahol nem okoz lépésvesztést.
De, a megfelelő teljesítményű trafó soha nem okoz hibát.
A döntés a tiéd.
A 4 motornak kicsit szűkös a 10 Amper. Legalább 12 -13 kellene.
Igaz, nem olvastam bele, hogyan is használnád a 4 motort.
Igy, már eldőlni látszik, hogy a kapcsi tápot kell használnod. Az, bőven sok.
Ha van kedved tökölni adok neked GPS modult és antennát amiből kiszedhető atomóra pontosságú 1 ppm-es jel. (a szokásos feltétellel!:) )
Ezzel a jellel már van egy nagy pontosságú referenciád amivel érdemes foglalkozni.
Ha nem tévedek akkor ez egy nap alatt 86400 másodperc amit vagy elektronikusan osztasz le, hogy meglegyen az egy körülfordulásod, vagy a motoron mechanikusan, vagy mindkettő alkalmazva.
Leadshine vezérlőnél mikrolépést beállítva a mechanikus áttétel mérete csökkenthető lenne. (sajnos ez nem 12 voltos)
Például 6400-as mikrolépésnél csak 1:13.5 áttétel kellene kihozni.
Így jócskán plusz nyomatékhoz is jutsz.
Gondolom távcsőhöz lesz.
Itt a sarki hobbi elektronika boltban a léptető motor vezérlő 1400Ft egységcsomagban. 6(5) vezetékes, unipoláris motorhoz ! egész lépéses. 5A kimenő áram.
Áramkorlát max ellenállással állítható be, de ezért kicsi olcsó és megy 12 voltról :)
Mondjuk ehhez így bazinagy áttétel kell fabrikálni 1:432
bajielektronika.hu
Viszont ha nem érdekel a GPS időalap akkor megmarad.
Kösz, hogy válaszra se méltattál pár napja.
Amikor levélben egy egyszerű, de sürgős segítséget kértem.
Ilyen az élet:((
A kétfázisú manapság az általános, és már jó ideje.
A korszerű 2 fázisú vezérlőkel mindent tudnak a 2 fázisú motorok.
Könnyen pótolható, és kezelhető.
A 3 fázisú egy külön világ. A maga rögös útjával. Van némi előnye. De én több hátrányát látok, a mi szempontunkból.
De, ha szereted az izgalmakat, kihívásokat, és a külön utakat, vágj bele.
Elsősorban a vezérlő a kritikus. De, ha már van, akkor érdemes megpróbálni. Általában olcsón szoktam látni motorokat. Persze ritka. Mert nincs igazán kereslet rá.
Szóval, ha már van vezérlőd. Akkor keress hozzá motort..
Jó néhány biztos lapul itt, ott vezérlő hiányában.
Sima járás, jó nyomaték görbe jellemzi. Ha jól emlékszem.
Danibá megint csak félre beszél !
3 fázisú léptetőmotorokat lehet kapni akár a klavió kft-nél is.
Berger Lahr régi vezérlő, de még mindig jobb mint bármelyik kínai!
Már megint be vagy lőve?
Ma egésznap az én sza--mat eszed?
Peersze hogy van a Klavionál új. Ott van a webárúházába.
Mondta, hogy újat akar venni?
Lehet, nem is passzol a régi Bergerjével.
Én, nem venék új motort hozzá.
Hidd el, hogy jóval többet ér mint azt te gondolád !
A kínai vezérlőkkel össze sem hasonlítható.
Volt szerencsém 3 fázisú Berger Lahr vezérlős gép mach3 átalakításhoz,tehát tudom mit beszélek.
De inkább akkor hallgass a kitiltott de gerinctelenül visszakúszott Danibára aki azt se tudja eszik e vagy isszák ezt a dolgot!
Nem létezik, hogy hagyod ezt, a provokátort tombolni, mocskolódni.
Bárhol, bárkinek segítek.
Néz be a Mach3 topikba is.
Ha tisztában vagy, hogy egy ipari cucc, akkor mi a baj azzal ha egy 6.8 Nm-es motor ennyibe kerül ?
Nézz meg egy ugyanekkora új 2 fázisú motor mennyibe fáj és utána pattogj az árán.
A régebbi még nem hibrid motorok eléggé zsákbamacskák, elég ha megütöttét a tengelyét már is csak a fele, harmada nyomatékot tudják, a szétszedés okozta lemágneseződésről nem is beszélve.
Tehát lehet vadászni motort hozzá , de aki tudja mit ad el az nem fogja csínján bánni az árral és a fent említett tényezők akkor is benne vannak.
Aki meg ipari vezérlővel gépet épít az biztos nem játék gépet csinál tehát a nem 0.5Nm-es motor fog rátenni, és a nagy motornak bizony ára van!
Danika nyugodjál meg és inkább húzd meg magad, mert nem én vagyok a megtűrt személy !
Nem gondolod, hogy más néven vissza regisztrálásoddal és besunnyogásoddal egyfajta módon arcul köpted a fórumozókat akik egységesen kiszavaztak ?
A vezérlő bazi drága hozzá és a 2 fázisú motorok mikrolépéses vezérlése miatt okafogyott lett az az alap felbontás.
Igen milyen jó is lenne az mikor bekapcsolod a gépet és arra vársz, hogy a csövek végre elérjék az üzemi hőmérsékletüket. :)
Viszont egy 5 tengelyes vezérlőnél a 40 darab cső simám kifűtené a műhelyedet is :D
Az arany elég xar vezető, (van jobb is) de nagyon jó bevonatként mert nem oxidálódik,
Tehát ez csak audiofil agyamentség, hogy magának a vezetéknek is ebből kell lenni.
(inkább ezüstöt ajánlanám)
Néhány fém fajlagos vezetőképessége:(Am/Vmm2)
ezüst 63
réz 56
arany 45
alumínium 37
vas 10
A kofa, mindkét zsebében kell hogy legyen egy-egy léptetőmotor!
Különben, balanszos lesz a kofa, no meg a röppálya is,és...sosem ér a Holdra!:))
[#wave]
Sziasztok! Ez a program jó lenne egy léptető motor vezérléshez? Amim van hozzá: Arduino Uno R3+L298n meghajtómodul!Lényegében annyit szeretnék elérni hogy a motor forogjon körbe körbe és egy idő után váltson forgás irányt!
//defining connections to L298N
int input1 = 22;
int input2 = 23;
int input3 = 28;
int input4 = 29;
void setup()
{
pinMode(input1,OUTPUT);
pinMode(input2,OUTPUT);
pinMode(input3,OUTPUT);
pinMode(input4,OUTPUT);
}
void loop()
{
//1st step
digitalWrite(input1,HIGH);
digitalWrite(input2,LOW);
digitalWrite(input3,LOW);
digitalWrite(input4,HIGH);
delay(10); //small delay between each step of 10ms
//2nd step
digitalWrite(input1,LOW);
digitalWrite(input2,HIGH);
digitalWrite(input3,LOW);
digitalWrite(input4,HIGH);
delay(10);
//3rd step
digitalWrite(input1,LOW);
digitalWrite(input2,HIGH);
digitalWrite(input3,HIGH);
digitalWrite(input4,LOW);
delay(10);
//4th step
digitalWrite(input1,HIGH);
digitalWrite(input2,LOW);
digitalWrite(input3,HIGH);
digitalWrite(input4,LOW);
delay(10);
}
Sziasztok! Easy Driver Léptető motor meghajtót keresek!!
Nem, nem leszel ugyanott.
Az elméleti sebességed meg duplázódik. A felbontásod a felére esik.
De ezzel egy időben a motorod orsóra jutó ereje a felére esik.
Kérdés az, elég lesz e a meglévő motorok. Vagy cserélni kell.
Szinte kísértetiesen ugyanez áll fenn nagyobb emelkedésű orsóra való csere esetén is.
Elkéstem...Feri már megmondta a tutit!:)
Azt akartam mondani, hogyha van a zsebedben három forint két darabban, akkor már nyert ügyed van.:))
Hehe!
35 éve...papírzsebkendő?[#nemtudom]
Opppsz!
(lehet, hogy mégis volt)???
Na de, azt...megnyálazni, ha nem elég "nyirkos"!!![#csodalk][#wow1]
[#vigyor2]
"Egyébként a nyalás is jó.
Lényeg, hogy nehogy eldurranjon idő előtt a nagy delejtől."
Most, vonatkoztassunk el kicsit a Deprez műszertől,....
Mindkét megállapításod igaz, megállja a helyét más összefüggésben is.:)))
(bocs Misi, de...hat órája pattog ez a magas labda)
[#nevetes1]
Felbontást számoltál már?
Én azt hittem, a két sárga vonalat csak az ábrád színesítésére rajzoltad oda.[#smile]
Mondom is magamban...
Ha lassan is, de azért a kőkemény valóságban is alakul a " 24 millió színárnyalat".[#wave]
Szerintem ezek a motorok a "büntetlenül szédszedhető" neodímium mágnessel szerelt hybrid motorok, nem utólag mágnesezik/üttetik őket.
0:31-nél látszanak a kék műanyag tárolódobozban a nikkel(?) bevonatú, fényes neodímium tárcsák.
A következő kockákon -a forgórész préselése után- is jól kivehetőek a fényes neodímium mágnesek.
Vannak ilyen motorjaim, régebben talán a boncolósban mutattam a szétszedett motorról képeket.
Ha jól emlékszem, akkor [#906@ANTAL GÁBOR] -nak is küldtem egy 23-ast tesztelésre.
De ha tévednék, úgy is kijavít valaki.
Ez meg abból adódik, hogy a léptetőmotor felbontása ebben az esetben 0,000625, és ha te 0,001 mozgást adsz ki, a motor egyszer 1-et lép, máskor egymás után gyorsan 2-t (ahogy a Mach3-at megírták). De mindenképpen nem lesz egyenletes a step jel. Akkor lenne egyenletes, ha a kiadott elmozdulás értéke megegyezik, vagy többszöröse a léptetővezérlő felbontásából adódó legkisebb elmozdulásnak.
Itt a baj!!!
Hol mérhető a Te 10 perced egy élet munkájához? [#kacsint]
Jelosztóval lehet hamarabb célba érsz:
https://vi.aliexpress.com/i/1005002947312581.html?gatewayAdapt=glo2vnm#nav-specification
vagy egy 1000-es encoder cserével.
Köszi!
Ááá... annyit nem ér, 2 Nm-es Nanotec motorok... csak olyan jól egybe van építve a mechanika.
Egyébként használtatok már ilyet? Van valami bővebb leírásod hozzá?
Más helyre lehet tudnám használni.
A szervomeghajtó nem tudta az osztást, egy az egyben adta ki a szervomotor jeleit, amit
az UC300ETH nem tudta lekezelni csak kb~60KHz-ig.
Komplett:
https://vi.aliexpress.com/item/1005002822611894.html?spm=a2g0o.productlist.main.33.1ff7AFY4AFY4Kr&algo_pvid=2c7204a4-d449-4a9c-b7bb-b6322fdf28bf&algo_exp_id=2c7204a4-d449-4a9c-b7bb-b6322fdf28bf-32&pdp_ext_f=%7B%22order%22%3A%2230%22%2C%22eval%22%3A%221%22%7D&pdp_npi=4%40dis%21HUF%214224.36%214224.36%21%21%2111.98%2111.98%21%40211b81a317529370278952603e658a%2112000043248514778%21sea%21HU%216275204850%21X&curPageLogUid=m7Uk9oLmNJTw&utparam-url=scene%3Asearch%7Cquery_from%3A
A másik hely amit említettem nekem is hasonló, Fanuc főhajtás 1024-et ad, így 2500 1/min felett nem valós az UCCNC kijelzése.
A szinkron menetfúráshoz nem kell mert az jellemzően 1000 fordulat alatt megy.
Ha van bővebb leírásod szívesen venném.
Hmm... hogy neked mindenre van Alis válaszod! :)
Előkerestem: :Q
DIP kapcsolók: Denominátor
Binary kódolású
pl: 5= 00000101
6 vezetékes mezei léptető motor.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 február 06, 13:11
Írta: ht0cjk58i Dátum 2012 február 06, 13:11
Valami ilyesmi irányítóra gondoltam.A joyal irányitom a fej mozgását a potikkal meg a tengely sebességet külön külön.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 február 06, 14:05
Írta: 000000000 Dátum 2012 február 06, 14:05
Szerintem egy pic-et vagy más programozható ic-t kellene használni.
Ha külön kell sebesség akkor gondolom a joy nem analóg, 4 vagy 4+1 bemenet a joy-tol és két analóg bemenet a poti-tól. Minden induláskor beolvassa a pot-irol a feszültséget, amit kísérleti úton meghatározva hozzárendelsz a sebességhez.
Valami ilyesmi:

Az enkóderes dolog sokkal szebb de kivitelezés az nehezebb és sokat kell szerintem kísérletezni főleg a gyorsítások miatt.
Ha külön kell sebesség akkor gondolom a joy nem analóg, 4 vagy 4+1 bemenet a joy-tol és két analóg bemenet a poti-tól. Minden induláskor beolvassa a pot-irol a feszültséget, amit kísérleti úton meghatározva hozzárendelsz a sebességhez.
Valami ilyesmi:
Az enkóderes dolog sokkal szebb de kivitelezés az nehezebb és sokat kell szerintem kísérletezni főleg a gyorsítások miatt.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 február 06, 14:07
Írta: keri Dátum 2012 február 06, 14:07
DC motorhoz nem kell vezérlő :)
Ez a szép benne.
A sebesség a tápfeszültséggel állítható, az irányra meg közvetlen gombokat teszel.
Ez a szép benne.
A sebesség a tápfeszültséggel állítható, az irányra meg közvetlen gombokat teszel.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 február 06, 14:08
Írta: 000000000 Dátum 2012 február 06, 14:08
ami még kell az a végálláskapcsoló
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 február 06, 14:09
Írta: 000000000 Dátum 2012 február 06, 14:09
Hogy ez milyen igaz, és DC nem fog berángatni - rezegni, szerintem.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 február 06, 14:12
Írta: keri Dátum 2012 február 06, 14:12
és analóg joy-os? Vagyis amennyire nyomod annyira gyorsul a kamera? Oda végkép analóg megoldást javaslok.
Ha kézmozdulatokat kell lekövetni akkor analóg megoldás hibátlan, egyszerű és olcsó.
Ha precíz programozott szinkron mozgás kell, akkor érdemes léptető motorral bajlódni. Persze Pál encoderes megoldása is jó, de két poti közé komparátor ami meghajtja a DC motort és máris szinkronban mozog a kezeddel, pontosság meg nem számít.
Ha kézmozdulatokat kell lekövetni akkor analóg megoldás hibátlan, egyszerű és olcsó.
Ha precíz programozott szinkron mozgás kell, akkor érdemes léptető motorral bajlódni. Persze Pál encoderes megoldása is jó, de két poti közé komparátor ami meghajtja a DC motort és máris szinkronban mozog a kezeddel, pontosság meg nem számít.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 február 06, 14:39
Írta: ht0cjk58i Dátum 2012 február 06, 14:39
Igen, de kérdem a DC-nél ha kis feszt adok akkor a telj. kisebb nem?
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 február 06, 14:45
Írta: keri Dátum 2012 február 06, 14:45
Igen, ez volna a lényeg. De szerintem te a nyomatékra gondoltál :)
Az áttétel miatt ez nem szokott probléma lenni.
Az áttétel miatt ez nem szokott probléma lenni.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 február 06, 14:50
Írta: ht0cjk58i Dátum 2012 február 06, 14:50
Igen a nyomatékra.És a léptecsnek sem kéne be "remegni" az áttétel miatt nem?Ha jól gondolom.Szerintem a léptecsekkel finomabb mozgást lehet kivitelezni,nem?Na meg persze a nyomaték is hellyel közel 1forma, ha jól tudom.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 február 06, 14:54
Írta: ht0cjk58i Dátum 2012 február 06, 14:54
Pontosan, ilyesmire gondoltam én is.Ez működő kapcsolás vagy sematikus?A PIC-et programozni is kéne ugye?Ebben tudsz segíteni?
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 február 06, 15:01
Írta: keri Dátum 2012 február 06, 15:01
Ez azért komplexebb kérdés kör.
Magyarázhatok neked még napestig, de leggyorsabban úgy tudsz használható tapasztalatot szerezni, ha kezedbe veszed a léptetőt is meg DC modell motort is, és játszol velük egy kicsit. Én gyerek koromtól fogva ilyenekkel játszok, és szerintem a többiek is, ezért megy nekünk ennyire lazán, nem azért mert egyszerű ;-)
A léptető motor nagyon nyomatékos, de apró ugrásokkal halad, a DC motor kevésbé nyomatékos álló helyzetben, de egyenletesen forog.
Mindkettővel meg lehet oldani a problémát. Mindkettőnek van előnye hátránya.
Hogy mégis melyiket használod az attól függ mi van a fiókban, mennyi pénzed van és mihez értesz.
Ötleteket szívesen adunk, de remélem azt nem várod el hogy helyetted megoldjuk a problémát.
Magyarázhatok neked még napestig, de leggyorsabban úgy tudsz használható tapasztalatot szerezni, ha kezedbe veszed a léptetőt is meg DC modell motort is, és játszol velük egy kicsit. Én gyerek koromtól fogva ilyenekkel játszok, és szerintem a többiek is, ezért megy nekünk ennyire lazán, nem azért mert egyszerű ;-)
A léptető motor nagyon nyomatékos, de apró ugrásokkal halad, a DC motor kevésbé nyomatékos álló helyzetben, de egyenletesen forog.
Mindkettővel meg lehet oldani a problémát. Mindkettőnek van előnye hátránya.
Hogy mégis melyiket használod az attól függ mi van a fiókban, mennyi pénzed van és mihez értesz.
Ötleteket szívesen adunk, de remélem azt nem várod el hogy helyetted megoldjuk a problémát.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 február 06, 15:08
Írta: ht0cjk58i Dátum 2012 február 06, 15:08
Dehogy várom, csak a tapasztaltabb embereknek a véleményére lennék vevő, hogy mit miért.Én is tom, hogy mind a kettő jó csupán a lehetőségeket hajhászom mielőtt belevágok.Ti gondolom több VARJÚT láttatok karón mint én ;)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 február 06, 15:08
Írta: 000000000 Dátum 2012 február 06, 15:08
Hát igen a pic-et programozni kell, tudok segíteni, de igazából az kellene hogy egyben legyen a dolog, és aki írja a programot az tudja is tesztelni élesben.
Cím: Re:Léptetőmotor
Írta: Benel Dátum 2012 február 06, 18:02
Írta: Benel Dátum 2012 február 06, 18:02
Sziasztok!
Szerintem a legegyszerűbb megoldás:
Futaba Attack ER 40/2/2 kit Kb. 14eFt
- kétcsatornás távirányító
- kétcsatornás vevő
- 2db servo(41 Ncm 0,14 mp/45°)
Marad a mechanikus szerelés
Szerintem a legegyszerűbb megoldás:
Futaba Attack ER 40/2/2 kit Kb. 14eFt
- kétcsatornás távirányító
- kétcsatornás vevő
- 2db servo(41 Ncm 0,14 mp/45°)
Marad a mechanikus szerelés
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 február 06, 18:10
Írta: keri Dátum 2012 február 06, 18:10
Készen megvenni a legolcsóbb, de szerintem ő építeni szeretne :)
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 február 06, 18:35
Írta: besirkyjh Dátum 2012 február 06, 18:35
Kis kavarodást látok a hajtások lehetöségében .
DC motor : talán a legolcsobb és a legegyszerübb megoldás de pozicionálásra és ismételt mozgásra nem alkalmas .
Szervo motor : valoszinü ide tulköltséges de folyamatos mozgásra és nyomaték átvitelre alkalmas .Pozicionálásra és ismételt mozgásokra használatos .
Léptetö motor : Ha az elérhetö legnagyobb fordulaton használod akkor a felbontástol függöen szép folyamatos mozgás érhetö el .Pozicionálásra és ismételt mozgásra alkalmas .Erre az alkalmazásra talán a legjobb .
A DC motor kivételével PC vagy mikrocontroller alkalmazása a pozicionálás miatt lehetséges .
Mind 3 alkalmazásnál mechanikai áttétel szükséges a folyamatos mozgás és a nyomaték elérése miatt .
A DC motort a szervomotortol az encoder különbözteti meg .Más és más vezérlö elektronika kel hozzájuk .
DC motor : talán a legolcsobb és a legegyszerübb megoldás de pozicionálásra és ismételt mozgásra nem alkalmas .
Szervo motor : valoszinü ide tulköltséges de folyamatos mozgásra és nyomaték átvitelre alkalmas .Pozicionálásra és ismételt mozgásokra használatos .
Léptetö motor : Ha az elérhetö legnagyobb fordulaton használod akkor a felbontástol függöen szép folyamatos mozgás érhetö el .Pozicionálásra és ismételt mozgásra alkalmas .Erre az alkalmazásra talán a legjobb .
A DC motor kivételével PC vagy mikrocontroller alkalmazása a pozicionálás miatt lehetséges .
Mind 3 alkalmazásnál mechanikai áttétel szükséges a folyamatos mozgás és a nyomaték elérése miatt .
A DC motort a szervomotortol az encoder különbözteti meg .Más és más vezérlö elektronika kel hozzájuk .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 február 06, 19:56
Írta: 000000000 Dátum 2012 február 06, 19:56
Ha nem "wireless" kamera akkor szerintem fölösleges a távirányitó+vevő.
Hát igen, ha van készen biztosan egyszerűbb.
Hát igen, ha van készen biztosan egyszerűbb.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 február 07, 07:54
Írta: 000000000 Dátum 2012 február 07, 07:54
Most nézem hogy ez a Futaba Kit egyben ennyi, de soha nem használtam ilyet ezért kérdezek:
Ezek nem úgy működnek hogy annyira mozdul a pl. szárnylapát amennyire a joy-t elmozdítod és amikor elengeded visszaáll 0 pozícióba?
A szervók (41 Ncm 0,14 mp/45°) itt lehet kevés a nyomaték lehet kevés a 45°.
Ezek nem úgy működnek hogy annyira mozdul a pl. szárnylapát amennyire a joy-t elmozdítod és amikor elengeded visszaáll 0 pozícióba?
A szervók (41 Ncm 0,14 mp/45°) itt lehet kevés a nyomaték lehet kevés a 45°.
Cím: Re:Léptetőmotor
Írta: Benel Dátum 2012 február 07, 21:13
Írta: Benel Dátum 2012 február 07, 21:13
Nagyobb teljesítményű szervó is kapható:
Futaba s9157
Volts: 6.0V
Torque: 425 oz-in (30.6 kg/cm)
Speed: 0.14 sec/60°
A szervók 180° elmozdulást tudnak, az adatlapokon a sebességet 45°/60° szögelforduláshoz tartozó idővel adják meg.
Amennyiben vezetékes megoldás is megfelel, akkor csak a szervó, és egy 555IC-is kapcsolás + pozicionáló potméter (Joy) szükséges.
Futaba s9157
Volts: 6.0V
Torque: 425 oz-in (30.6 kg/cm)
Speed: 0.14 sec/60°
A szervók 180° elmozdulást tudnak, az adatlapokon a sebességet 45°/60° szögelforduláshoz tartozó idővel adják meg.
Amennyiben vezetékes megoldás is megfelel, akkor csak a szervó, és egy 555IC-is kapcsolás + pozicionáló potméter (Joy) szükséges.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 február 08, 08:40
Írta: 000000000 Dátum 2012 február 08, 08:40
© BeneL én ezt a megoldást választanám, az egyszerűsége miatt.
akkor kell egy analog joy, biztosan lehet külön is kapni vagy kitermelhető analog játékkarból (gamepad).
Amennyiben vezetékes megoldás is megfelel, akkor csak a szervó, és egy 555IC-is kapcsolás + pozicionáló potméter (Joy) szükséges.
akkor kell egy analog joy, biztosan lehet külön is kapni vagy kitermelhető analog játékkarból (gamepad).
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 február 08, 13:09
Írta: 000000000 Dátum 2012 február 08, 13:09
Sziasztok!
Azt szeretném kérdezni, hogy tapasztalatotok szerint mekkora PWM frekvenciának van még értelme egy vezérlőben?
Ahogy én látom (elméleti oldalról), már viszolnylag kis léptetési frekvencia esetén sem tud az áram akkorára nőni a tekercsekben, hogy a vezérlőnek ki kellene kapcsolnia a feszültséget, így ilyenkor a PWM vezérlés nem nagyon számít. Szétnéztem a vezérlők között, és a fix frekvenciával működőek 50kHz körül mennek. Az én gondolkodásom szerint ennek elégnek kell lennie hobby CNC célokra, de mivel igazából sosem dolgoztam még léptetőmotorokkal, ezért jobbnak láttam, ha tapasztalt embereket is megkérdezek.
Azt szeretném kérdezni, hogy tapasztalatotok szerint mekkora PWM frekvenciának van még értelme egy vezérlőben?
Ahogy én látom (elméleti oldalról), már viszolnylag kis léptetési frekvencia esetén sem tud az áram akkorára nőni a tekercsekben, hogy a vezérlőnek ki kellene kapcsolnia a feszültséget, így ilyenkor a PWM vezérlés nem nagyon számít. Szétnéztem a vezérlők között, és a fix frekvenciával működőek 50kHz körül mennek. Az én gondolkodásom szerint ennek elégnek kell lennie hobby CNC célokra, de mivel igazából sosem dolgoztam még léptetőmotorokkal, ezért jobbnak láttam, ha tapasztalt embereket is megkérdezek.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2012 február 08, 17:00
Írta: jv7pu3a5p Dátum 2012 február 08, 17:00
Szia,
Az 50Khz jó szerintem. Az enyémben ha jól rémlik 62Khz körül volt.
Saját vezérlőt építesz?
Az 50Khz jó szerintem. Az enyémben ha jól rémlik 62Khz körül volt.
Saját vezérlőt építesz?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 február 08, 17:20
Írta: 000000000 Dátum 2012 február 08, 17:20
Köszi a választ. Igen, egyébként, saját vezérlőt építek. Nekem ez is a hobby cnc része, és erre a részére kell pillanatnyilag a legkevesebbet költenem, hogy hosszabb időre lefoglaljam magam :-). Közben pedig ismerkedem a mechanikával.
Ezt néztem ki magamnak. Teszek mellé első körben egy CC430-at. Később tervezek ARM-ra váltani. Majd ha nagyon rám jön a programozhatnék ;-).
Ha jól sikerül, és érdekel mást is, akkor lehet, hogy közzéteszem a teljes dokumentációt...
Ezt néztem ki magamnak. Teszek mellé első körben egy CC430-at. Később tervezek ARM-ra váltani. Majd ha nagyon rám jön a programozhatnék ;-).
Ha jól sikerül, és érdekel mást is, akkor lehet, hogy közzéteszem a teljes dokumentációt...
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 február 08, 17:54
Írta: keri Dátum 2012 február 08, 17:54
De még mennyire. Repülőgépem földi tesztelésére csináltam én is egy átalakítót PC joy és szervó közé, tök jó játék :)
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 február 08, 17:57
Írta: keri Dátum 2012 február 08, 17:57
Jól látod, nincs sok értelme a túl nagy frekvenciának. 10khz-n is kiválóan működött nekem, csak az a fütyülés elég idegesítő, ezért felnyomtam 20khz-ra ott már nem hallatszik.
A frekvencia növelésével egyébként egyre jobban melegszik a FET szabadonfutó ellenállása, illetve a kapcsolási veszteség is. SZóval érdemes az adott alkalmazásnál a lehető leg alacsonyabban tartani...mondjuk LED meghajtásnál 500khz-t is jól viselték még szóval nagyon nem tudsz mellé lőni.
A frekvencia növelésével egyébként egyre jobban melegszik a FET szabadonfutó ellenállása, illetve a kapcsolási veszteség is. SZóval érdemes az adott alkalmazásnál a lehető leg alacsonyabban tartani...mondjuk LED meghajtásnál 500khz-t is jól viselték még szóval nagyon nem tudsz mellé lőni.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 február 08, 17:57
Írta: keri Dátum 2012 február 08, 17:57
akarom mondani szabadonfutó diódája
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 február 08, 18:02
Írta: s7manbs8 Dátum 2012 február 08, 18:02
Na, de a lednek nincs annyi induktivitása, na van még repülés ?
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2012 február 08, 18:05
Írta: jv7pu3a5p Dátum 2012 február 08, 18:05
Jópofa IC. Ha az építés öröméért csinálod, akkor rajta. De ha megelégszel 40V/2A-el, akkor TB6560 gyorsabb megoldás lehet.
Annak idején én is nekifogtam saját vezérlőt fejleszteni, AVR volt az "agya", IR2104 driver és IRFR540 FET volt a végfok.
Sokáig használtam, majd el is kezdtem fejleszteni a 2. verziót, de idő hiányában már nem készült el.
Ebben a topikban van is dokumentálva egy pár dolog róla, olvass vissza ha érdekel.
Annak idején én is nekifogtam saját vezérlőt fejleszteni, AVR volt az "agya", IR2104 driver és IRFR540 FET volt a végfok.
Sokáig használtam, majd el is kezdtem fejleszteni a 2. verziót, de idő hiányában már nem készült el.
Ebben a topikban van is dokumentálva egy pár dolog róla, olvass vissza ha érdekel.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 február 08, 18:36
Írta: keri Dátum 2012 február 08, 18:36
Ott azért használtam olyan nagy frekit, mert két ceruza akkuról step-up áramkörrel 12V-ot csináltam, és ha növelni akarod az áramot, akkor növelni kell a frekit, de ha növeled a frekit csökken a feszültség, tehát csökkenteni kell az induktivitást, tehát egészen kicsi induktivitással és nagyon nagy frekvenciával lehet nagy feszültség növelést és nagy áramot előállítani.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 február 08, 19:27
Írta: 000000000 Dátum 2012 február 08, 19:27
Az építés öröméért csinálom. Ez egy olyan terület, ahol nincs tapasztalatom, de érdekel. Szerintem tanulságos lesz.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 február 09, 03:10
Írta: ht0cjk58i Dátum 2012 február 09, 03:10
Pontosan ezért gondoltam én is már így utána nézve és a hozzászólások után a léptecsekre, az én meglátásom szerint is ez a legjobb.Az áttétel még nincs kész(nem tom milyen lesz),még.Valószinűleg elég nagy, hogy a motor nagyobb ford tudjon dolgozni, a nyomaték így nagyobb lesz, ha jól tudom(kis fordhoz viszonyítva).A hétvégén kezdem a vez megépítését.Főkép a vez volt a bajom, nem igazán találtam olyat ami tuti meg, így marad a próba.A mostani tud irányt és sebb változtatni is.Már a nyákrajz is készűl :)
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 február 09, 07:39
Írta: besirkyjh Dátum 2012 február 09, 07:39
Szia
A léptetömotor max fordulat választásánál ne menj 1000 fölé .Ha fogazott kerék áttételben gondolkozol vigyázz mert a nagyobb tárcsák már elég huzos árban vannak .Szerintem 4:1 vagy 5:1 elég is lenne .Probálj Nema17-es léptetöt szerezni azokban elég sok az olyan aminek 400 egész lépés egy kör és akár 0,5Nm nyomatékot is tud .A többi csak számolás kérdése de pl ezzel a motorral joval 3Nm fölé tudsz menni a hajtásban .
A léptetömotor max fordulat választásánál ne menj 1000 fölé .Ha fogazott kerék áttételben gondolkozol vigyázz mert a nagyobb tárcsák már elég huzos árban vannak .Szerintem 4:1 vagy 5:1 elég is lenne .Probálj Nema17-es léptetöt szerezni azokban elég sok az olyan aminek 400 egész lépés egy kör és akár 0,5Nm nyomatékot is tud .A többi csak számolás kérdése de pl ezzel a motorral joval 3Nm fölé tudsz menni a hajtásban .
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 február 10, 04:37
Írta: ht0cjk58i Dátum 2012 február 10, 04:37
Köszönöm minden kedves fórumozónak a segítséget.A fejleményekkel még jelentkezek.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 február 10, 04:48
Írta: ht0cjk58i Dátum 2012 február 10, 04:48
Ezért gondoltam a léptecsre mert kisebb a ford mint a DC-nek.A motor meg szinte mindegy mert nem én állom az anyagi részét, így olyat veszek amilyen kell ill. amilyen jó lesz.A fogaskerekeket meg legyártatom bagóért bármilyen méretben.A mechanikai számításokhoz még idő hiányában nem kezdtem bele.A tanácsaid köszönöm és meg fogadom.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 február 11, 11:12
Írta: 000000000 Dátum 2012 február 11, 11:12
Keresek adatlapot a következő motorokhoz:
ASTROSYN Miniangle Stepper
- 23PM-K302-07 (bipoláris, 4 vezetékes)
- 23LM-C352-08 (unipoláris, 6 vezetékes)
Tudnátok linkelni egyet-egyet?
ASTROSYN Miniangle Stepper
- 23PM-K302-07 (bipoláris, 4 vezetékes)
- 23LM-C352-08 (unipoláris, 6 vezetékes)
Tudnátok linkelni egyet-egyet?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 február 28, 08:43
Írta: 000000000 Dátum 2012 február 28, 08:43
Sziasztok!
Valaki tud valamilyen infót erről a motorról?
Step-Syn
Sanyo denki
103-771-1242
A bekötése érdekelne elsősorban :) kerestem minden felé, de semmit nem találtam róla. :(
Valaki tud valamilyen infót erről a motorról?
Step-Syn
Sanyo denki
103-771-1242
A bekötése érdekelne elsősorban :) kerestem minden felé, de semmit nem találtam róla. :(
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 február 28, 09:02
Írta: besirkyjh Dátum 2012 február 28, 09:02
Szia
Egy foto többet segitene ! Föleg a vezetékeiröl szinekkel és a kis adat táblárol .
Egy foto többet segitene ! Föleg a vezetékeiröl szinekkel és a kis adat táblárol .
Cím: Re:Léptetőmotor
Írta: ggdr57dg Dátum 2012 február 28, 09:52
Írta: ggdr57dg Dátum 2012 február 28, 09:52
Itt is beírom, másoknak is legyen meg:
Sanyo Denki 103-771-1242
Két fázisú, Unipoláris (6 kivezetéses).
- Lépés: 1.8°/Step
- Feszültség: 3.9V=
- Áram: 1.35A
- Tekercs ellenállása: 2x2.92 Ω/fázis
- Súlya: ~0.51kg
- Motortengely átmérője: 6.4 mm
- Felfogatás: NEMA23 47x47mm (M5)
Kb. 0,6Nm
Némi további leírás. Bekötés is.
Sanyo Denki 103-771-1242
Két fázisú, Unipoláris (6 kivezetéses).
- Lépés: 1.8°/Step
- Feszültség: 3.9V=
- Áram: 1.35A
- Tekercs ellenállása: 2x2.92 Ω/fázis
- Súlya: ~0.51kg
- Motortengely átmérője: 6.4 mm
- Felfogatás: NEMA23 47x47mm (M5)
Kb. 0,6Nm
Némi további leírás. Bekötés is.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 március 18, 06:37
Írta: ht0cjk58i Dátum 2012 március 18, 06:37
Helló Urak.
Elkészült a léptecs vezérlő ULN2803-al, már kísérletezgettem vele és itt jött a probléma.Alacsony fordulaton remeg-morog a motor, de forog,nagyobb fordulaton szépen simán megy.Alacsony ford. kb:2sec/ford.Próbáltam az 555 RC tagot variálni, így a max fordulatot meg tudtam emelni mert az alap az kevés volt kb:3-4sec/ford.Ha az RC tagot variálom akkor is remeg-morog a motor, de mindig más tartományban ill a max ford lecsökken.Szerintetek mi okozza a morgást?
Elkészült a léptecs vezérlő ULN2803-al, már kísérletezgettem vele és itt jött a probléma.Alacsony fordulaton remeg-morog a motor, de forog,nagyobb fordulaton szépen simán megy.Alacsony ford. kb:2sec/ford.Próbáltam az 555 RC tagot variálni, így a max fordulatot meg tudtam emelni mert az alap az kevés volt kb:3-4sec/ford.Ha az RC tagot variálom akkor is remeg-morog a motor, de mindig más tartományban ill a max ford lecsökken.Szerintetek mi okozza a morgást?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 március 18, 08:14
Írta: besirkyjh Dátum 2012 március 18, 08:14
A léptetö motorok kis fordulaton "remegnek" .
Ez függ a fázis áramtol is és a mikrosteptöl is .
Lejjebb kellene vinni a fázis áramot , nem látványos de javulhat .Mekkora mikrostepet állitottál ( minél nagyobb annál kisebb a remegés kisfordulaton de befolyásolja a max sebességedet ) .
Ez függ a fázis áramtol is és a mikrosteptöl is .
Lejjebb kellene vinni a fázis áramot , nem látványos de javulhat .Mekkora mikrostepet állitottál ( minél nagyobb annál kisebb a remegés kisfordulaton de befolyásolja a max sebességedet ) .
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 március 18, 08:22
Írta: ht0cjk58i Dátum 2012 március 18, 08:22
Nincs mikrostep, csak mezei manuális vezérlő, nem PC-ről megy.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 március 18, 08:26
Írta: ht0cjk58i Dátum 2012 március 18, 08:26
Ez az a vezérlő.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 március 18, 08:27
Írta: ht0cjk58i Dátum 2012 március 18, 08:27
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 március 18, 08:42
Írta: keri Dátum 2012 március 18, 08:42
Ezzel ne is várj jobbat.
Ez a léptető sajátja.
Minden fordulaton és terhelésen más lenne az optimális áram. 1 helyre be is tudod állítani, de az összes üzemi tartományra nem.
Komolyabb vezérlők tudnak olyat hogy minden fordulatra más áramot, illetve gyorsuláshoz megint csak más áramot használnak, ezzel jelentősen csökken ez a jelenség. Illetve mikrostep alkalmazása is csökkenti, azonban amit te vársz azt csak a szervó motorok tudják, ugyanis visszacsatolás nélkül lehetetlent vársz.
Ez a léptető sajátja.
Minden fordulaton és terhelésen más lenne az optimális áram. 1 helyre be is tudod állítani, de az összes üzemi tartományra nem.
Komolyabb vezérlők tudnak olyat hogy minden fordulatra más áramot, illetve gyorsuláshoz megint csak más áramot használnak, ezzel jelentősen csökken ez a jelenség. Illetve mikrostep alkalmazása is csökkenti, azonban amit te vársz azt csak a szervó motorok tudják, ugyanis visszacsatolás nélkül lehetetlent vársz.
Cím: Re:Léptetőmotor
Írta: cx79vmdj5 Dátum 2012 március 18, 08:46
Írta: cx79vmdj5 Dátum 2012 március 18, 08:46
A problémádat a rezonanciafrekvencia okozza. Ez egy természetes jelenség alacsony frekvencián a léptetőmotoroknál. Féllépéssel, vagy inkább mikrolépéssel javithatsz rajta, szélsőséges esetben a motor belengése ellépést is okozhat. Az áram levétele is megoldás lehet, de azzal a végsebességed és a motor ereje is alacsonyabb lesz, és a rezonancia freki csak alacsonyabb frekire tolodik. Éveket küzdöttem vele, de mára már a saját vezérlőm hajtom. Annyi előnye van a saját vezérlőnek, hogy rengeteget tanultam belőle.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 március 18, 08:52
Írta: ht0cjk58i Dátum 2012 március 18, 08:52
A rezonanciafrekire gondoltam én is.Na akkor további kísérletek jönnek.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 március 18, 11:40
Írta: keri Dátum 2012 március 18, 11:40
ez magában álló motor?
MErt ha ráteszed gépre, egészen máshogy fog működni.
Pl, egy fogasszíj, vagy kuplung, valamint a gép súrlódásai önmagában nagyon sok rezonanciát nyelnek el.
MErt ha ráteszed gépre, egészen máshogy fog működni.
Pl, egy fogasszíj, vagy kuplung, valamint a gép súrlódásai önmagában nagyon sok rezonanciát nyelnek el.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 március 18, 13:10
Írta: ht0cjk58i Dátum 2012 március 18, 13:10
Igen most magában áll,raktam rá tengelyféket így szinte nincs is rezonancia.Már csak nagyobb táp kell szerintem neki mert a 2 motor max ford nem megy mind a két motoron,ha kicsit visszább veszem a ford akkor jó.Na meg kicsit keveslem az erőt is.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 március 18, 14:31
Írta: besirkyjh Dátum 2012 március 18, 14:31
Keribá , izzo :)
Egy a pozitiv ágban a léptetö közös pontjával sorba kötött izzo csodákra képes ( de hogy hány voltos és wattos azt ki kel kisérletezni ) .
Egy a pozitiv ágban a léptetö közös pontjával sorba kötött izzo csodákra képes ( de hogy hány voltos és wattos azt ki kel kisérletezni ) .
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 március 18, 14:39
Írta: besirkyjh Dátum 2012 március 18, 14:39
Valamiért az SLA ic ugrott be ( nem az volt a terv eredetileg ? ) .
Furcsa amit akarsz .Már rezonál a motorod de még gyengének találod .A rezonancia többnyire a magas fázis áramtol ered illetve a mikrostep hiányátol de " eröt" csak a fázisáram növelésével tudsz neki adni ami ugye még nagyobb rezonanciához vezet .A fékezés az jo ötlet de igy a max sebességed jelentösen csökkenni fog .Ha az ULN melegedne simán a tetejére forrasz még egy emeletet ( minden lábat minden lábbal ) igy duplázodik a terhelhetösége .
Furcsa amit akarsz .Már rezonál a motorod de még gyengének találod .A rezonancia többnyire a magas fázis áramtol ered illetve a mikrostep hiányátol de " eröt" csak a fázisáram növelésével tudsz neki adni ami ugye még nagyobb rezonanciához vezet .A fékezés az jo ötlet de igy a max sebességed jelentösen csökkenni fog .Ha az ULN melegedne simán a tetejére forrasz még egy emeletet ( minden lábat minden lábbal ) igy duplázodik a terhelhetösége .
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 március 18, 16:02
Írta: keri Dátum 2012 március 18, 16:02
Vagyis áramgenerátor.
Az valóban sokat javít.
Az valóban sokat javít.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 március 18, 17:23
Írta: ht0cjk58i Dátum 2012 március 18, 17:23
Nem kezdettől az ULN volt tervben.Így van ez a léptecsekkel,nem egyszerű menet.Ha PC-s vez jó lenne nem lenne ilyen gond.De kamera mozgató daruhoz egy Pc azért már túlzás lenne :).Ezzel a vezérlővel nem forog olyan gyorsan mint PC-sel.Amúgy is kamera elég lassan forogna de a simább lépésekért akartam fentebb vinni a fordulatott, hogy az lassító áttét után sima legyen a járása.Kísérletezgetek még kicsit és meglátjuk mi lesz belőle.Igaz, hogy van gyári vezérlő de abban hol a kihívás és a tapasztalat?Próbálok videót feltenni még este.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 március 18, 18:45
Írta: ht0cjk58i Dátum 2012 március 18, 18:45
A motor adatai:12V/1A 11Ncm/5 lépés/sec.
Nem lehet hogy a motor kicsi ehhez a vezérlőhöz?Ezekből az adatokból hogy tudom meg a max fordulatot?
Nem lehet hogy a motor kicsi ehhez a vezérlőhöz?Ezekből az adatokból hogy tudom meg a max fordulatot?
Cím: Re:Léptetőmotor
Írta: B.Tibor Dátum 2012 március 19, 01:58
Írta: B.Tibor Dátum 2012 március 19, 01:58
Ilyesmi kameramozgató darut akarsz csinálni?
link (elvileg rögtön elindul a videó, de ha nem, kattints a CRAN-ra)
Ez egy PIC mikrokontrollerrel és két db RC szervóval működik, a tengelyek végén van 1-1 potméter, ami a pozíciót mutatja, lehet kézzel mozgatni a kamerát 2 irányban, tetszőleges sebességgel, és lehet memorizálni is egy előre beállított mozgást, amit gombnyomásra ismételtetni bármennyiszer. Képes nagyon lassan is menni, teljesen reszketés mentesen, ha jól emlékszem kb 2 perc alatt teszi meg a 270 fokot.
A programot én írtam, apám a mechanika 80%-át, a kameramozgatást meg 100%-osan. Ez egy egyedi darab, egy havernak készült.
link (elvileg rögtön elindul a videó, de ha nem, kattints a CRAN-ra)
Ez egy PIC mikrokontrollerrel és két db RC szervóval működik, a tengelyek végén van 1-1 potméter, ami a pozíciót mutatja, lehet kézzel mozgatni a kamerát 2 irányban, tetszőleges sebességgel, és lehet memorizálni is egy előre beállított mozgást, amit gombnyomásra ismételtetni bármennyiszer. Képes nagyon lassan is menni, teljesen reszketés mentesen, ha jól emlékszem kb 2 perc alatt teszi meg a 270 fokot.
A programot én írtam, apám a mechanika 80%-át, a kameramozgatást meg 100%-osan. Ez egy egyedi darab, egy havernak készült.
Cím: Re:Léptetőmotor
Írta: B.Tibor Dátum 2012 március 19, 02:08
Írta: B.Tibor Dátum 2012 március 19, 02:08
Ez is egy jó honlap, innen sok ötletet merítettünk:
ServoCity PT-2100 Pan & Tilt System
Ez már nagyobb motorokkal van mozgatva.
ServoCity PT-2100 Pan & Tilt System
Ez már nagyobb motorokkal van mozgatva.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2012 március 19, 04:42
Írta: ht0cjk58i Dátum 2012 március 19, 04:42
Igen ilyet kéne gyártani havernak.Jó kis lap, tényleg sok ötlet van.Köszi.Esetleg a te vezérlődről tudnánk értekezni?Mailban.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 március 19, 08:26
Írta: svejk Dátum 2012 március 19, 08:26
No, gondoltam én, hogy ki van ez már találva házilag is.
Sipos8 már vagy a 3. ember aki ilyesmit szeretne építeni.
Jó a cuccotok!
Nagysebességű kamerátok nincs véletlen?
Sipos8 már vagy a 3. ember aki ilyesmit szeretne építeni.
Jó a cuccotok!
Nagysebességű kamerátok nincs véletlen?
Cím: Re:Léptetőmotor
Írta: B.Tibor Dátum 2012 március 19, 14:05
Írta: B.Tibor Dátum 2012 március 19, 14:05
Úgy tudom, hogy csak 50 fps-es van. Gondolom ennél gyorsabbat szeretnél.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 március 19, 19:14
Írta: svejk Dátum 2012 március 19, 19:14
Igen, gyorsabbat...
Csak eszembe jutott, látva hogy kölcsönzéssel is foglalkozol. (vagy a honlap nem a Tiéd?)
Csak eszembe jutott, látva hogy kölcsönzéssel is foglalkozol. (vagy a honlap nem a Tiéd?)
Cím: Re:Léptetőmotor
Írta: B.Tibor Dátum 2012 március 20, 00:06
Írta: B.Tibor Dátum 2012 március 20, 00:06
Igen, a honlap nem az enyém. Azé, akinek a darut csináltuk. Ő a videós, mi csak segítettünk neki összehozni dolgokat. Én csak hobbiból kamerázgatok magamnak, olcsó kamerával.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 március 20, 10:14
Írta: 000000000 Dátum 2012 március 20, 10:14
Sziasztok!
Remélem jó helyre írok:) Szóval nem régiben megjelent egy új szerintem kínai léptető meghajtó, szóval a linken lévő szerkezetről lenne szó és a kérdésem mennyiben jobb szerintetek ez mint a tb6560 érdemes e belevágni a fejszét, vagy inkább klavio féle megható és motorok??
http://viewitem.eim.ebay.hu/3x-M542-CNC-Stepper-Driver-For-Nema17-Nema23-Nema34-Motor-5-Axis-Breakout-Board/120864106262/item
Remélem jó helyre írok:) Szóval nem régiben megjelent egy új szerintem kínai léptető meghajtó, szóval a linken lévő szerkezetről lenne szó és a kérdésem mennyiben jobb szerintetek ez mint a tb6560 érdemes e belevágni a fejszét, vagy inkább klavio féle megható és motorok??
http://viewitem.eim.ebay.hu/3x-M542-CNC-Stepper-Driver-For-Nema17-Nema23-Nema34-Motor-5-Axis-Breakout-Board/120864106262/item
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 március 20, 10:53
Írta: svejk Dátum 2012 március 20, 10:53
A TB6560-nél bizonyára többet tud, már eleve az adatlapja szerint is, de a tuti csak akkor derül ki ha valaki vesz belőle.
Azért azt is számításba kell venni, hogy milyen a terméktámogatás és az esetleges szervízháttér.
Azért azt is számításba kell venni, hogy milyen a terméktámogatás és az esetleges szervízháttér.
Cím: Re:Léptetőmotor
Írta: cx79vmdj5 Dátum 2012 március 20, 11:10
Írta: cx79vmdj5 Dátum 2012 március 20, 11:10
Eladó Sla7062 ickből épitett 4tengelyes vezérlő, 3db 2A-es motorral együtt. 30000Ft. Végre a saját vezérlőm hajtom, és feleslegessé vált. sla7062
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 március 20, 20:46
Írta: besirkyjh Dátum 2012 március 20, 20:46
Szia
Kis fantáziával könnyen kiegészithetö az MSD50-4.2 itthon forgalmazott termékre ( csak a nevük más ) , viszont itthon kapsz rá korekt szervizt és nem érhet meglepetés .
Nem szabad összehasonlitani az 6560-al ( nem egy kategoria ) de hobbiszintü alkalmazásra az is jo választás lehet .
Kis fantáziával könnyen kiegészithetö az MSD50-4.2 itthon forgalmazott termékre ( csak a nevük más ) , viszont itthon kapsz rá korekt szervizt és nem érhet meglepetés .
Nem szabad összehasonlitani az 6560-al ( nem egy kategoria ) de hobbiszintü alkalmazásra az is jo választás lehet .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 március 21, 09:10
Írta: 000000000 Dátum 2012 március 21, 09:10
Zoli, Svejk köszönöm a gyors reakciót! Gyors utána nézelődés után Klavio féle szett +30.000Huf lenne. Annyiért meg már inkább vennék egy 100w-os omron szervót úgyis van 3 hajtóművem ami hozzávaló 1:15-ös áttétellel. Na még meglátom:) Azért köszike.
Cím: Re:Léptetőmotor
Írta: 9npx2xk89 Dátum 2012 március 21, 10:11
Írta: 9npx2xk89 Dátum 2012 március 21, 10:11
Azért ez 47.000Ft! A kínai vezérlőből 19.000 az 5 tengelyes, és mellékesen szerintem ez is kínai.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 március 21, 13:11
Írta: besirkyjh Dátum 2012 március 21, 13:11
Más kategoria ! Áram beállitás . mikrostep , sleep mod és nemutolso sorban sebesség a lényeges különbség .A megbizhatoságát csak akkor tudod ha mindkét fajtát használod hosszutávon .Az MSD-t nem csak a hobbi körökben lehet használni .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 március 25, 03:14
Írta: 000000000 Dátum 2012 március 25, 03:14
Szervusztok!
Szeretnék egy lineáris pályán egy kb 5-6 kg tömegű tárgyat mozgatni. A pontosság nem követelmény. Lenne kétféle üzemmódom: egy kvázi gyors üzemmód (max. 0.5-1 m/s sebesség, amit egy kis kézi kerékkel szabályoznék, illetve egy lassú üzemmód, ahol csak nagyon lassan kellene araszolnia a tömegnek.. Természetesen hogy egyszerűbb legyen a dolog, ferde pályán is működnie kellene, azaz folyamatos tartónyomatékra is szükségem lenne..
Számolgattam, számolgattam kisebb-nagyobb motorokat alkalmazva különféle lassító áttételeket.. De így vagy a végsebesség lett kicsi, vagy tartóerő..
Csak elméletileg felmerült bennem, mi lenne, ha fogasszíjhajtás esetén több ugyanolyan léptetőmotort fűznék fel ugyanarra a szíjra? Közelítőleg azért összeadódna a nyomatékuk? Gondolom egy egyszerűbb szíjfeszítős megoldással egy acélhuzallal erősített bordásszíj ki tud egyenlíteni némi szögelfordulási különbséget.. Hogy miért jutott ez eszembe, mert hosszabb pálya alatt szépen elférne 3 kisebb motor.. Nem mellesleg van is pár egyforma motorom..
Aztán vásároltam egy izmosabb léptetőmotort a klavio kft-nél. (Uni: 3.9V,3A,2.15Nm vagy Bi: 5.5V, 2.1A,3Nm). Ezzel megoldódik talán az inercia kérdése, illetve ez a moci még magasabb fordulatot is igéér.. Van valakinek tapasztalata ilyen motor mikrolépéses vezérléséről? Én egy SLA7062m Unipol. meghajtóra gondoltam.. Illetve rendeltem Bipoláris mikrolépéses célIC-t is, de az még nem ért ide.. Van valami ötletetek Uni vagy Bi vezérlés között lesz-e számottevő kölönbség..
köszönöm
Szeretnék egy lineáris pályán egy kb 5-6 kg tömegű tárgyat mozgatni. A pontosság nem követelmény. Lenne kétféle üzemmódom: egy kvázi gyors üzemmód (max. 0.5-1 m/s sebesség, amit egy kis kézi kerékkel szabályoznék, illetve egy lassú üzemmód, ahol csak nagyon lassan kellene araszolnia a tömegnek.. Természetesen hogy egyszerűbb legyen a dolog, ferde pályán is működnie kellene, azaz folyamatos tartónyomatékra is szükségem lenne..
Számolgattam, számolgattam kisebb-nagyobb motorokat alkalmazva különféle lassító áttételeket.. De így vagy a végsebesség lett kicsi, vagy tartóerő..
Csak elméletileg felmerült bennem, mi lenne, ha fogasszíjhajtás esetén több ugyanolyan léptetőmotort fűznék fel ugyanarra a szíjra? Közelítőleg azért összeadódna a nyomatékuk? Gondolom egy egyszerűbb szíjfeszítős megoldással egy acélhuzallal erősített bordásszíj ki tud egyenlíteni némi szögelfordulási különbséget.. Hogy miért jutott ez eszembe, mert hosszabb pálya alatt szépen elférne 3 kisebb motor.. Nem mellesleg van is pár egyforma motorom..
Aztán vásároltam egy izmosabb léptetőmotort a klavio kft-nél. (Uni: 3.9V,3A,2.15Nm vagy Bi: 5.5V, 2.1A,3Nm). Ezzel megoldódik talán az inercia kérdése, illetve ez a moci még magasabb fordulatot is igéér.. Van valakinek tapasztalata ilyen motor mikrolépéses vezérléséről? Én egy SLA7062m Unipol. meghajtóra gondoltam.. Illetve rendeltem Bipoláris mikrolépéses célIC-t is, de az még nem ért ide.. Van valami ötletetek Uni vagy Bi vezérlés között lesz-e számottevő kölönbség..
köszönöm
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 március 25, 08:37
Írta: 000000000 Dátum 2012 március 25, 08:37
Ne így csináld, túl nagy a dinamikai átfogási tényező kívánalmad a léptetőmotoros hajtáshoz, amit ha egy motor nem tud optimálisan, több se fog tudni. Inkább egy csigahajtóműves 12-24 V-os 100-200W körüli DC motorban gondolkodjál a megvalósítás kapcsán.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2012 március 25, 09:36
Írta: jv7pu3a5p Dátum 2012 március 25, 09:36
Nekem van hasonló léptecsem, 3.1Nm 4.2A, a tied is ez lehet talán, szerintem az áramot csak egy tekercsre írtad. Na a lényeg vegyél hozzá MSDD meghajtót szintén Klavió. Meg fogsz lepődni mit hoz ki belőle. JA és szinte hangtalanul forgatja ha beállítod rendesen, PC-n.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 március 25, 10:09
Írta: besirkyjh Dátum 2012 március 25, 10:09
Szia
Nézegetem a feltételeidet és szerintem ebben a honapban Te vagy a harmadik aki kamera mozgatot épit magának .
3Nm-el kisebb liftet is lehet mozgatni nem 5-6kg-ot :)
Vigyázni a nagy nyomatéku léptetövel mert szét rázza a mechanikádat .Inkább táncolj a határon azzal nem lesz baj .
Nézegetem a feltételeidet és szerintem ebben a honapban Te vagy a harmadik aki kamera mozgatot épit magának .
3Nm-el kisebb liftet is lehet mozgatni nem 5-6kg-ot :)
Vigyázni a nagy nyomatéku léptetövel mert szét rázza a mechanikádat .Inkább táncolj a határon azzal nem lesz baj .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 március 25, 10:28
Írta: 000000000 Dátum 2012 március 25, 10:28
"3Nm-el kisebb liftet is lehet mozgatni nem 5-6kg-ot :)"
Nana! Csakhogy Ő 1 m/s-al akar mozogni, és odáig valahogy szegény léptecsenek fel kell tudni gyorsulnia. Utána már viszi a lendülete is vízszinte síkban:), ha netán nulla közelivé válik a nyomatéka akkor is. Ha persze mint ahogyan írja, még lejtő, netán függőleges üzemmód is követelmény, nem is olyan egyszerű ezt olcsón, megbízhatóan megoldani hajtástechnikailag.
De úgy látszik valóban mostanában sokan ilyesmi kamera mozgatásokban gondolkodnak, tehát igény van rá.
Nana! Csakhogy Ő 1 m/s-al akar mozogni, és odáig valahogy szegény léptecsenek fel kell tudni gyorsulnia. Utána már viszi a lendülete is vízszinte síkban:), ha netán nulla közelivé válik a nyomatéka akkor is. Ha persze mint ahogyan írja, még lejtő, netán függőleges üzemmód is követelmény, nem is olyan egyszerű ezt olcsón, megbízhatóan megoldani hajtástechnikailag.
De úgy látszik valóban mostanában sokan ilyesmi kamera mozgatásokban gondolkodnak, tehát igény van rá.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 március 25, 13:26
Írta: besirkyjh Dátum 2012 március 25, 13:26
Ja ja .
Eddig az a tapasztalat hogy erös kompromisszumokra képesek a fiuk föleg az 1m/s terében :)
Mihez is kellene 1m/s mozgás ? fotozáskor indulásnál és megállásnál leszeked a fotomasina , flmeknél meg mit 1m/s részletben ?
Feltéve ha tényleg azt szeretne épiteni .
Eddig az a tapasztalat hogy erös kompromisszumokra képesek a fiuk föleg az 1m/s terében :)
Mihez is kellene 1m/s mozgás ? fotozáskor indulásnál és megállásnál leszeked a fotomasina , flmeknél meg mit 1m/s részletben ?
Feltéve ha tényleg azt szeretne épiteni .
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 március 25, 13:27
Írta: besirkyjh Dátum 2012 március 25, 13:27
leszakad a fotomasina , filmeknél meg mit lát 1m/s részletben ?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 március 25, 15:34
Írta: s7manbs8 Dátum 2012 március 25, 15:34
Biztos csák norisz karatemozdulatát akarják lekövetni, ahhoz kell az irtózatos tempó. :)
Cím: Re:Léptetőmotor
Írta: w987wzmm Dátum 2012 április 03, 17:41
Írta: w987wzmm Dátum 2012 április 03, 17:41
Sziasztok!
L298-as léptecsvezérővel, hogy lehet az áramot beállítani, illetve a mikrosteppet?
Van valami kapcsolásotok hozzá?
L298-as léptecsvezérővel, hogy lehet az áramot beállítani, illetve a mikrosteppet?
Van valami kapcsolásotok hozzá?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 április 03, 18:58
Írta: 000000000 Dátum 2012 április 03, 18:58
Hello!
http://www.cuteminds.com/index.php/en/repository/category/3-eaglesch
Itt van kompletten nyák terv beültetés stb.
http://www.cuteminds.com/index.php/en/repository/category/3-eaglesch
Itt van kompletten nyák terv beültetés stb.
Cím: Re:Léptetőmotor
Írta: w987wzmm Dátum 2012 április 03, 19:54
Írta: w987wzmm Dátum 2012 április 03, 19:54
Köszi! [#vigyor2]
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 április 03, 19:59
Írta: besirkyjh Dátum 2012 április 03, 19:59
Szia
Mikrostep nincs rajta csak féllépés ( half ) 400step/kör ha 1.8 fokos a léptetöd .
Az áramot ugy állitod hogy a potméter középsö lábán méred a feszt és ezt zszorzod 2 vel ( 250mv = 500mA/fázi , 600mv = 1200mA/fázis stb ) .
Mikrostep nincs rajta csak féllépés ( half ) 400step/kör ha 1.8 fokos a léptetöd .
Az áramot ugy állitod hogy a potméter középsö lábán méred a feszt és ezt zszorzod 2 vel ( 250mv = 500mA/fázi , 600mv = 1200mA/fázis stb ) .
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 április 03, 20:03
Írta: besirkyjh Dátum 2012 április 03, 20:03
Szia
Mikrostep nincs rajta csak féllépés ( half ) 400step/kör ha 1.8 fokos a léptetöd .
Az áramot ugy állitod hogy a potméter középsö lábán méred a feszt és ezt zszorzod 2 vel ( 250mv = 500mA/fázi , 600mv = 1200mA/fázis stb ) .
Mikrostep nincs rajta csak féllépés ( half ) 400step/kör ha 1.8 fokos a léptetöd .
Az áramot ugy állitod hogy a potméter középsö lábán méred a feszt és ezt zszorzod 2 vel ( 250mv = 500mA/fázi , 600mv = 1200mA/fázis stb ) .
Cím: Re:Léptetőmotor
Írta: w987wzmm Dátum 2012 április 03, 21:04
Írta: w987wzmm Dátum 2012 április 03, 21:04
Köszi!!!! [#heureka][#worship]
Cím: Re:Léptetőmotor
Írta: wds98kmdg Dátum 2012 április 04, 23:14
Írta: wds98kmdg Dátum 2012 április 04, 23:14
Sziasztok,
feltúrtam az ezeréves lomokat tartalmazó dobozomat, és a következő motorok kerültek elő:
- PM55L-048-HP69 C2164-60045 TB5x19A (csatlakozók száma 6)
- M35SP-5 C2124-60190 (csatlakozók száma 5)
- RD855Z05 D2162-60006 (szerintem ez sima motor, mert csak két kivezetés van rajta)
Érdemben ezekket tudom használni a pici gépemhez, vagy ezek játékszerek és cnc témában felejtsem el őket?
feltúrtam az ezeréves lomokat tartalmazó dobozomat, és a következő motorok kerültek elő:
- PM55L-048-HP69 C2164-60045 TB5x19A (csatlakozók száma 6)
- M35SP-5 C2124-60190 (csatlakozók száma 5)
- RD855Z05 D2162-60006 (szerintem ez sima motor, mert csak két kivezetés van rajta)
Érdemben ezekket tudom használni a pici gépemhez, vagy ezek játékszerek és cnc témában felejtsem el őket?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 április 04, 23:22
Írta: s7manbs8 Dátum 2012 április 04, 23:22
Esetleg ha kép is van róluk, nagyon pici géphez lehet használni mindent kivéve, ha a motor nagyobb mint a gép. :)
Cím: Re:Léptetőmotor
Írta: w987wzmm Dátum 2012 április 09, 10:38
Írta: w987wzmm Dátum 2012 április 09, 10:38
Sziasztok!
Tudja valaki, hogy egy 50V-os léptecs vezérlő, mennyire szereti, ha 48V-al járatom. Elég közel van a maximumhoz. Vagy semmi gond?
Tudja valaki, hogy egy 50V-os léptecs vezérlő, mennyire szereti, ha 48V-al járatom. Elég közel van a maximumhoz. Vagy semmi gond?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 április 09, 14:15
Írta: s7manbs8 Dátum 2012 április 09, 14:15
Ha megoldod, hogy valami Zenerrel leveszi az esetleg keletkező többlet feszültséget, ha olyan előfordulhat a tekercsek megszakítása, kikapcsolása után, akkor nem kellene gondnak lennie.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 április 09, 15:14
Írta: besirkyjh Dátum 2012 április 09, 15:14
Ha az 50/4.2-es sok néven forgalmazott van akkor kb 52voltnál tiltás lépfel .
Ha más fajta akkor lehet a 48 sok neki .
Milyen a tipusa ?
Ha más fajta akkor lehet a 48 sok neki .
Milyen a tipusa ?
Cím: Re:Léptetőmotor
Írta: w987wzmm Dátum 2012 április 09, 16:11
Írta: w987wzmm Dátum 2012 április 09, 16:11
Szia!
Valami 50-4.2 Kapcsolóüzemű tápról menne... 48V-os. Gondolom elég pontosan tarja a kimenő feszt.
Valami 50-4.2 Kapcsolóüzemű tápról menne... 48V-os. Gondolom elég pontosan tarja a kimenő feszt.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 április 09, 16:20
Írta: besirkyjh Dátum 2012 április 09, 16:20
Elvileg jo hozzá .
Ha több a kelleténél akkor ugy is letilt ( piros led ) .
Ha több a kelleténél akkor ugy is letilt ( piros led ) .
Cím: Re:Léptetőmotor
Írta: w987wzmm Dátum 2012 április 09, 16:21
Írta: w987wzmm Dátum 2012 április 09, 16:21
Köszi!
Cím: Re:Léptetőmotor
Írta: Kicsa Dátum 2012 április 10, 09:14
Írta: Kicsa Dátum 2012 április 10, 09:14
Nem tudom,hogy ide kellene írnom,vagy inkább az Elektronika topicba...
Élesztgetem a tengelyeket,de az Y szán gyengélkedik. A korábbi 3m/perc sebesség az orsó beállítása után 1.6 m/percre esett vissza. A korábbi tesztekhez képesti különbség a kábel illetve annak hossza. Liycy kábel,5*0.5-ös ,olyan 4 méter körüli.
A motor Klavio Kft-s,3.1 Nm-es példány.
Szerintetek a túl hosszú kábel okozhat ilyen gyengeséget?
Élesztgetem a tengelyeket,de az Y szán gyengélkedik. A korábbi 3m/perc sebesség az orsó beállítása után 1.6 m/percre esett vissza. A korábbi tesztekhez képesti különbség a kábel illetve annak hossza. Liycy kábel,5*0.5-ös ,olyan 4 méter körüli.
A motor Klavio Kft-s,3.1 Nm-es példány.
Szerintetek a túl hosszú kábel okozhat ilyen gyengeséget?
Cím: Re:Léptetőmotor
Írta: xfg6v697j Dátum 2012 április 10, 09:56
Írta: xfg6v697j Dátum 2012 április 10, 09:56
az ötödik ér az közös föld?
mert akkor a névleges motoráram többszöröse is folyhat rajta,ha nem egészlépést használsz.
én úgy tudom a 0.5-s vezeték az KB 5A-t szeret max,,ezér szerintem lehetséges,hogy ilyen hosszban feszültségesés következik be a vezetéken.emiatt teljesítménycsökkenés léphet fel.
esetleg tartósan használva langyosodhat is.
mert akkor a névleges motoráram többszöröse is folyhat rajta,ha nem egészlépést használsz.
én úgy tudom a 0.5-s vezeték az KB 5A-t szeret max,,ezér szerintem lehetséges,hogy ilyen hosszban feszültségesés következik be a vezetéken.emiatt teljesítménycsökkenés léphet fel.
esetleg tartósan használva langyosodhat is.
Cím: Re:Léptetőmotor
Írta: Kicsa Dátum 2012 április 10, 10:13
Írta: Kicsa Dátum 2012 április 10, 10:13
Igen,az 5. ér a középkivezetések,közösítve.
Érdemes behúzni mellé még egy szálat,keresztmetszet-növelési célzattal? Mondjuk ilyen hosszú kábelre nem lesz szükségem,szerintem olyan 2 m körüli lesz az optimális. A másik két tengely kábelei készen vannak,ez pedig a 'maradék' kábel,ráforrasztottam egyben.
Érdemes behúzni mellé még egy szálat,keresztmetszet-növelési célzattal? Mondjuk ilyen hosszú kábelre nem lesz szükségem,szerintem olyan 2 m körüli lesz az optimális. A másik két tengely kábelei készen vannak,ez pedig a 'maradék' kábel,ráforrasztottam egyben.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 április 10, 13:47
Írta: besirkyjh Dátum 2012 április 10, 13:47
Unipoláris a vezérlöd ?
Milyen fajta , mekkora a max feszültség rajta ?
Vágd le a szükséges hoszt és ugy probáld ( határ eset a vezeték keresztmetszete ugy gondolom ) .Esetleg kicsit nagyobb fázis áramot adhatsz neki de figyeld motor höfokát is ( 50 fok körül még jo ) .
Milyen fajta , mekkora a max feszültség rajta ?
Vágd le a szükséges hoszt és ugy probáld ( határ eset a vezeték keresztmetszete ugy gondolom ) .Esetleg kicsit nagyobb fázis áramot adhatsz neki de figyeld motor höfokát is ( 50 fok körül még jo ) .
Cím: Re:Léptetőmotor
Írta: xfg6v697j Dátum 2012 április 10, 14:24
Írta: xfg6v697j Dátum 2012 április 10, 14:24
az segíthet. mert a féllépésnél egyszerre több motortekercs van áram alatt,és emiatt kétszerannyi áram folyik a közös szálon,ami már szerintem sok ennek a keresztmetszertnek.
Cím: Re:Léptetőmotor
Írta: Kicsa Dátum 2012 április 10, 14:39
Írta: Kicsa Dátum 2012 április 10, 14:39
Igen unipoláris a vezérlő, H1.
A táp jól pufferelt (4*4700 uF) 45V Dc,más motorral (2.1 Nm-es ) rövidebb kábellel nem tapasztaltam ilyet. A motoráramot felcsavartam,de eléggé melegszik a motor,ez nem segít. Sajnos nem tudom a normális áramot sem,lekopott a cimke ezen része.
Örülnék ha plusz kábel nélkül megoldódna mert elég hülyén nézne ki a dolog...végső soron mondjuk inkább az,mint hogy nem működik.
A táp jól pufferelt (4*4700 uF) 45V Dc,más motorral (2.1 Nm-es ) rövidebb kábellel nem tapasztaltam ilyet. A motoráramot felcsavartam,de eléggé melegszik a motor,ez nem segít. Sajnos nem tudom a normális áramot sem,lekopott a cimke ezen része.
Örülnék ha plusz kábel nélkül megoldódna mert elég hülyén nézne ki a dolog...végső soron mondjuk inkább az,mint hogy nem működik.
Cím: Re:Léptetőmotor
Írta: xfg6v697j Dátum 2012 április 10, 14:47
Írta: xfg6v697j Dátum 2012 április 10, 14:47
esetleg egy kis plussz vezeték ideiglenes berakásával próbáld meg jobb lessz e.
nézd még át a vezetékcsatlakozásokat.
mert ha nem tökéletesek,ott is lehet veszteség.
nézd még át a vezetékcsatlakozásokat.
mert ha nem tökéletesek,ott is lehet veszteség.
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2012 április 10, 15:03
Írta: Rabb Ferenc Dátum 2012 április 10, 15:03
A Klavió adatlapja szerint 4,2A a fázisáram. A H1-nek ehhez a motorhoz 40V DC kellene. A vezérlőt féllépéses üzemmódban járatod? Mert a H1-nek az kell.
Cím: Re:Léptetőmotor
Írta: Kicsa Dátum 2012 április 10, 16:57
Írta: Kicsa Dátum 2012 április 10, 16:57
A vezérlőt fél lépéses üzemmódban hajtom,igen. Akkor tekerhetnék még egy kicsit az áram trimmerén,de inkább hagyom így,az emelt feszültség miatt most nem hinném hogy túl tudna melegedni. 3/4 állásnál kicsit visszább van.
Levágom a vezetéket rövidebbre,aztán kipróbálom a plusz vezetékkel,van-e valami különbség.
Levágom a vezetéket rövidebbre,aztán kipróbálom a plusz vezetékkel,van-e valami különbség.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 április 10, 17:22
Írta: besirkyjh Dátum 2012 április 10, 17:22
Csak vissza kerestem a géped és látom is a léptetödet az Y tengelynél .
Na most lenne jo a mikrostep mert én simán tennék rá egy gyorsitást 1:2 ben .Ez a léptetö sajnos a lustább fajta és 600 fölé nem igazán szeret menni , e fölött rezeg és blokkol ( egy probát megér hogy folyamatosan szoritod a motor tengelyét és ugy keresed meg a max fordulatát ) .Ezek a léptetök elég hamar tullendülnek a pozicion és akkor blokkolnak , ha terheled akkor nem tud tullendülni . Egy motor cserével megoldodhat a sebesség gondod pl : 1.7Nm ?
A H1 egy kiválo unipoláris vezérlö ( fütyölde ) szerintem azzal nincs gondod .
Még esetleg , csak a 3.1Nm-es vezetékeit kicserélni vastagabbra ?
Na most lenne jo a mikrostep mert én simán tennék rá egy gyorsitást 1:2 ben .Ez a léptetö sajnos a lustább fajta és 600 fölé nem igazán szeret menni , e fölött rezeg és blokkol ( egy probát megér hogy folyamatosan szoritod a motor tengelyét és ugy keresed meg a max fordulatát ) .Ezek a léptetök elég hamar tullendülnek a pozicion és akkor blokkolnak , ha terheled akkor nem tud tullendülni . Egy motor cserével megoldodhat a sebesség gondod pl : 1.7Nm ?
A H1 egy kiválo unipoláris vezérlö ( fütyölde ) szerintem azzal nincs gondod .
Még esetleg , csak a 3.1Nm-es vezetékeit kicserélni vastagabbra ?
Cím: Re:Léptetőmotor
Írta: Kicsa Dátum 2012 április 10, 17:42
Írta: Kicsa Dátum 2012 április 10, 17:42
Kicseréltem a közös kábelt vastagra de így sem jobb a dolog. Lehet hogy nem csak a közös kábel volt gyenge,hanem a többi is? A bosszantó az hogy tudott ennél jóval többet is ez a motor,kb a duplájával ment hiba nélkül.
Ha leveszem az orsóról nagyon jó erőben van. Ha a gyorsítást leveszem,akkor is leakad. Kicseréltem az összes kábelt vastagabbra próbából,hátha...meg mindjárt odapróbálom az E240es szervót is,elfér-e..? :D:D
Ha leveszem az orsóról nagyon jó erőben van. Ha a gyorsítást leveszem,akkor is leakad. Kicseréltem az összes kábelt vastagabbra próbából,hátha...meg mindjárt odapróbálom az E240es szervót is,elfér-e..? :D:D
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 április 10, 17:49
Írta: besirkyjh Dátum 2012 április 10, 17:49
A gyorsitásnak nincs köze a leakadáshoz .
Probáld terhelni a motort a helyén !
Probáld terhelni a motort a helyén !
Cím: Re:Léptetőmotor
Írta: Kicsa Dátum 2012 április 10, 18:02
Írta: Kicsa Dátum 2012 április 10, 18:02
Próbáltam megfogni de sok javulást nem tapasztaltam. Ha nagyon megszorítom,akkor pedig leakad. Valószínűleg ez ennyit fog tudni...hiába cseréltem ki a kábeleket. (hosszú de kb 2x keresztmetszet)
Csak azt nem értem,amikor teszt volt,hogy ment ennyit...Az egyik végállás közelében ahogy halad,lehet hallani-érezni hogy berezeg az egész és le is akad rögtön. Így gondolom,nincs mit tenni.
Csak azt nem értem,amikor teszt volt,hogy ment ennyit...Az egyik végállás közelében ahogy halad,lehet hallani-érezni hogy berezeg az egész és le is akad rögtön. Így gondolom,nincs mit tenni.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2012 április 10, 19:13
Írta: jv7pu3a5p Dátum 2012 április 10, 19:13
A motorok hibátlanok. Nálam ugyanezek 13000mm/p is tudnak produkálni 5000mm/s2 gyorsulás mellett. 50V járatom őket MSDD vezérlővel, bipoláris kötésben.
Nem tudom mekkora az orsód emelkedése, ha 5mm körüli, akkor Zolinak igaza van, lehetne gyorsító áttétellel is próbálkozni.
Nálam 10mm az orsó emelkedése.
Amúgy a vezetéket vékonynak találom, én személy szerint a vezérlőket a motor mellé raktam.
Nem tudom mekkora az orsód emelkedése, ha 5mm körüli, akkor Zolinak igaza van, lehetne gyorsító áttétellel is próbálkozni.
Nálam 10mm az orsó emelkedése.
Amúgy a vezetéket vékonynak találom, én személy szerint a vezérlőket a motor mellé raktam.
Cím: Re:Léptetőmotor
Írta: Kicsa Dátum 2012 április 10, 19:20
Írta: Kicsa Dátum 2012 április 10, 19:20
Tessék,jól látom? 13.000 mm/percet írtál?
Az orsóm 4 mm emelkedéssel bír. Ezen van most egy 1:2 lassító áttétel.
Egyébként példának okáért az X tengelyen egy 2.1 Nm-es motor van,hasonló az Y-éhoz. A kábel ugyan olyan és körülbelül egyforma hosszúságú is : Ez a tengely 4.5 m/percet tud. (terhelés nélkül csak egy acéllapot 'rángat')
Mennyibe kerül egy ilyen MSDD vezérlő? Sokat nem tudok róluk,csak hogy az MSD digitális változata?
(El nem tudnám képzelni,milyen lenne a gép minden tengelyen mondjuk 6-7 m/perc sebességgel...)
Az orsóm 4 mm emelkedéssel bír. Ezen van most egy 1:2 lassító áttétel.
Egyébként példának okáért az X tengelyen egy 2.1 Nm-es motor van,hasonló az Y-éhoz. A kábel ugyan olyan és körülbelül egyforma hosszúságú is : Ez a tengely 4.5 m/percet tud. (terhelés nélkül csak egy acéllapot 'rángat')
Mennyibe kerül egy ilyen MSDD vezérlő? Sokat nem tudok róluk,csak hogy az MSD digitális változata?
(El nem tudnám képzelni,milyen lenne a gép minden tengelyen mondjuk 6-7 m/perc sebességgel...)
Cím: Re:Léptetőmotor
Írta: xfg6v697j Dátum 2012 április 10, 19:34
Írta: xfg6v697j Dátum 2012 április 10, 19:34
a kábel esetleg,mint induktivitás is belejátszhat.
ha már így benne vagy a kábelcserélgetésben,érdemes lenne mégegyszer megnézni rövid vezetékezéssel,mint amilyennel a nagy sebességet tapaszralrad,hogy most is tudja e.
ha már így benne vagy a kábelcserélgetésben,érdemes lenne mégegyszer megnézni rövid vezetékezéssel,mint amilyennel a nagy sebességet tapaszralrad,hogy most is tudja e.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2012 április 10, 19:36
Írta: jv7pu3a5p Dátum 2012 április 10, 19:36
Igen, nem elírás annyit is tud. De nem kergetem annyival, mert nem is lenne biztonságos, illetve a mechanika is határeset. Jelenleg 8000mm/p van visszavéve a G0. Még így is úgy rángatja a szánokat...
Itt egy nyákúrás, x, y 5000mm/p előtolás, Z 1500mm/p
Bocsi kicsit nagy a fájl.
Szerintem lassító nem kell, inkább gyorsító. Cseréld meg a két tárcsát.
t2cnc honlapján nézd meg a vezérlőt, 30 körül valahol.
Így van MSD digi változata, más elv szerint vezérli a motorokat, így tudnak még többet kipréselni a mociból.
Itt egy nyákúrás, x, y 5000mm/p előtolás, Z 1500mm/p
Bocsi kicsit nagy a fájl.
Szerintem lassító nem kell, inkább gyorsító. Cseréld meg a két tárcsát.
t2cnc honlapján nézd meg a vezérlőt, 30 körül valahol.
Így van MSD digi változata, más elv szerint vezérli a motorokat, így tudnak még többet kipréselni a mociból.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2012 április 10, 19:39
Írta: jv7pu3a5p Dátum 2012 április 10, 19:39
Csak akkor álmodj nagy sebességről ha kibírja a mechanika is. Én sajnálom már, ezért is csak 5000-rel fúrom a nyákot, az a pár másodperc nem oszt nem szoroz. Így is 100 furat 30-40 másodperc.
Amúgy ha kiváncsi vagy, szívesen látlak. Magánban tolj egy mailt, ha gondolod.
Amúgy ha kiváncsi vagy, szívesen látlak. Magánban tolj egy mailt, ha gondolod.
Cím: Re:Léptetőmotor
Írta: Kicsa Dátum 2012 április 10, 19:45
Írta: Kicsa Dátum 2012 április 10, 19:45
Hát nem térek magamhoz!
A 'kerékcsere' nem megy olyan egyszerűen mint a Forma1-ben,ugyanis a nagy kerék nem fér el a motortartó miatt a motoron.
Megvan a vezérlő,sajnos valóban 30 körül van,és ez egy tengely.
csewe! Erre gondoltam én is,mindjárt vágok rövid kábeleket és kipróbálom. Már úgy is szétszedtem a zsugorcsövezést.
A 'kerékcsere' nem megy olyan egyszerűen mint a Forma1-ben,ugyanis a nagy kerék nem fér el a motortartó miatt a motoron.
Megvan a vezérlő,sajnos valóban 30 körül van,és ez egy tengely.
csewe! Erre gondoltam én is,mindjárt vágok rövid kábeleket és kipróbálom. Már úgy is szétszedtem a zsugorcsövezést.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 április 10, 19:49
Írta: s7manbs8 Dátum 2012 április 10, 19:49
Mivel lehet ezt lejátszani rendesen, nekem nem akarja, youtubra nem tudod feltenni ?
Cím: Re:Léptetőmotor
Írta: xfg6v697j Dátum 2012 április 10, 19:51
Írta: xfg6v697j Dátum 2012 április 10, 19:51
énnálam egyforma motorok vannak és mégis párosítanom kellett a vezérlő csatornáival,mert nem volt mindegy melyik csatornán melyik motor vol.
ha nem jól párosítottam,sokkal hangosabban ment.
ha nem jól párosítottam,sokkal hangosabban ment.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 április 10, 19:53
Írta: s7manbs8 Dátum 2012 április 10, 19:53
Megvan már az az L298 panel, a múltkor említetted, hogy hamarosan lesz új nyákterved ?
Cím: Re:Léptetőmotor
Írta: xfg6v697j Dátum 2012 április 10, 19:54
Írta: xfg6v697j Dátum 2012 április 10, 19:54
nálam is kimerevedik vlc playerrel
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2012 április 10, 19:57
Írta: jv7pu3a5p Dátum 2012 április 10, 19:57
Nálam a WIN7 média player gond nélkül viszi.
Bocsánat még lusta voltam keresni konvertáló progit (mp4 -> avi)
A teló csak ebbe a formátumba rögzít...
Bocsánat még lusta voltam keresni konvertáló progit (mp4 -> avi)
A teló csak ebbe a formátumba rögzít...
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2012 április 10, 19:58
Írta: jv7pu3a5p Dátum 2012 április 10, 19:58
Nálam viszi a VLC...
Cím: Re:Léptetőmotor
Írta: xfg6v697j Dátum 2012 április 10, 20:06
Írta: xfg6v697j Dátum 2012 április 10, 20:06
Xp-s mediplayer nem eszi.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2012 április 10, 20:25
Írta: jv7pu3a5p Dátum 2012 április 10, 20:25
Cím: Re:Léptetőmotor
Írta: xfg6v697j Dátum 2012 április 10, 20:30
Írta: xfg6v697j Dátum 2012 április 10, 20:30
mindjárt más!
Cím: Re:Léptetőmotor
Írta: Kicsa Dátum 2012 április 10, 20:34
Írta: Kicsa Dátum 2012 április 10, 20:34
Ez érdekes jelenség,ezt nem is vettem figyelembe. (A tesztnél össze vissza voltak bekötve a motorok)
Még egy próba a felcserélésre aztán 'feladom'. Jó lesz ez a 1.5 m/perc is...azt legalább stabilan tudja. Na de ezt még meglesem.
Még egy próba a felcserélésre aztán 'feladom'. Jó lesz ez a 1.5 m/perc is...azt legalább stabilan tudja. Na de ezt még meglesem.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 április 10, 20:41
Írta: s7manbs8 Dátum 2012 április 10, 20:41
Jó én kissé el vagyok maradva rendszerileg, meg gépileg is, de azért nem az őskorban járok, de eme új konverterrel vagy valami csak megpróbálom megnézni, hogy milyen gyors az a fúró .
Cím: Re:Léptetőmotor
Írta: xfg6v697j Dátum 2012 április 10, 20:42
Írta: xfg6v697j Dátum 2012 április 10, 20:42
szerintem is elégedett lehetsz vele.
az enyémek csak 500mm/percet tudnak.
igaz nemegész 1Nm-es motorok.
az enyémek csak 500mm/percet tudnak.
igaz nemegész 1Nm-es motorok.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 április 10, 20:45
Írta: s7manbs8 Dátum 2012 április 10, 20:45
Na most az megy, csak már akkor a alaplapomat kéne lecserélni, hogy gyorsabb legyen, mert ez nálam nagyon szaggat. :)
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 április 10, 21:49
Írta: besirkyjh Dátum 2012 április 10, 21:49
Szia
Igen megjöttek és jok is ( már kiprobáltam egy garniturát ) .
Sprint Layout5 , mehet ?
Igen megjöttek és jok is ( már kiprobáltam egy garniturát ) .
Sprint Layout5 , mehet ?
Cím: Re:Léptetőmotor
Írta: bvadkrcds Dátum 2012 április 10, 22:02
Írta: bvadkrcds Dátum 2012 április 10, 22:02
Szisztok!
Hogyan lehet megoldani, hogy léptecsre encodert rakjak? Van két X-tengelyem , ami nincs mechanikusan összekötve. Problémát jelenthet, ha lépésvesztés vagy tápfesz kimaradás van. Megcsavarodhat a híd.
Mondjuk adott egy léptecs vezérlő: Step Dir… Az encoder jeleit A,B hogy tudnám felhasználni? Egy második LPT port???? Ami az encodert kezeli?
Hogyan lehet megoldani, hogy léptecsre encodert rakjak? Van két X-tengelyem , ami nincs mechanikusan összekötve. Problémát jelenthet, ha lépésvesztés vagy tápfesz kimaradás van. Megcsavarodhat a híd.
Mondjuk adott egy léptecs vezérlő: Step Dir… Az encoder jeleit A,B hogy tudnám felhasználni? Egy második LPT port???? Ami az encodert kezeli?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 április 10, 23:22
Írta: s7manbs8 Dátum 2012 április 10, 23:22
Van olyanom, igen, azzal meg tudom nézni. :) Kösz.
Cím: Re:Léptetőmotor
Írta: xfg6v697j Dátum 2012 április 11, 06:28
Írta: xfg6v697j Dátum 2012 április 11, 06:28
a mach nem támogatja léptető+enkoder kombinációt.
Azért olyat el tudnék képzelni,hogy a két enkoder dro-ját összevetni egy brainnal,és ha eltérést észlel bizonyos határok kött,.akkor leállítja a g kod futását.
Azért olyat el tudnék képzelni,hogy a két enkoder dro-ját összevetni egy brainnal,és ha eltérést észlel bizonyos határok kött,.akkor leállítja a g kod futását.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 április 11, 06:51
Írta: besirkyjh Dátum 2012 április 11, 06:51
Szia
Ha meg is sikerül oldanod szoftveresen a gép kikapcsolt állapotában mi védi meg az elmozdulástol .
Jobban jársz ha összekötöd fizikailag a két tengelyt .
Orso vagy fogasléc van ?
Ha meg is sikerül oldanod szoftveresen a gép kikapcsolt állapotában mi védi meg az elmozdulástol .
Jobban jársz ha összekötöd fizikailag a két tengelyt .
Orso vagy fogasléc van ?
Cím: Re:Léptetőmotor
Írta: bvadkrcds Dátum 2012 április 11, 07:55
Írta: bvadkrcds Dátum 2012 április 11, 07:55
Szia!
Az elmozdulástól egy áttétel óvja. A hidat nem tudod kézzel megtolni. A egész asztalt eltolod. A motorok tartanak annyit táp nélkül is, hogy ne forduljanak el.
Az elmozdulástól egy áttétel óvja. A hidat nem tudod kézzel megtolni. A egész asztalt eltolod. A motorok tartanak annyit táp nélkül is, hogy ne forduljanak el.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 április 11, 08:03
Írta: besirkyjh Dátum 2012 április 11, 08:03
Akkor marad a hajtás átépités szervora vagy keresd a Klaviot Ök most kezdték el forgalmazni az encoderes léptetöket .Biztos tudnak ajánlani valamit !
Cím: Re:Léptetőmotor
Írta: wzc80zbf7 Dátum 2012 április 11, 08:04
Írta: wzc80zbf7 Dátum 2012 április 11, 08:04
Akkor ezek szerint jobb választás a Szervó motor+encoder párosítás? Egy 2NM-es léptetőmotornak milyen W számú szervó motor a pót? Kérdem én mivel lehet helyettesíteni?
Cím: Re:Léptetőmotor
Írta: Kicsa Dátum 2012 április 11, 09:30
Írta: Kicsa Dátum 2012 április 11, 09:30
Kezdem furán érezni magam. Nem tudom,hogyan sikerült elérni azt a sebességet előzőleg,de most 1700 mm/perc fölé nem tudok menni vele. Még gondolkozom picit hogy mi is van,aztán továbblépek...:)
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 április 11, 11:15
Írta: besirkyjh Dátum 2012 április 11, 11:15
Szia
4mm-es orsoval ez az 1700mm az áttétellel közel 850-es fordulat , ettöl többet ettöl a motortol ne várj ( föleg ezen a feszültségen ) .
Nézd meg a motorod nyomaték görbélyét .
4mm-es orsoval ez az 1700mm az áttétellel közel 850-es fordulat , ettöl többet ettöl a motortol ne várj ( föleg ezen a feszültségen ) .
Nézd meg a motorod nyomaték görbélyét .
Cím: Re:Léptetőmotor
Írta: Kicsa Dátum 2012 április 11, 12:56
Írta: Kicsa Dátum 2012 április 11, 12:56
Szia!
Megnéztem de annyit látok rajta,hogy esik. Viszont nem tudom, hogy a szán mozgáshoz megkora nyomatékigény társul,szóval zsákutca. Megnyugtató az,hogy azt mondjátok : többre nem képes ez a motor. Tehát akkor nincs itt hiba,csak a cél volt túl optimistán kijelentve. Ha nem tudott volna ennél jóval többet,nem is lennék fennakadva...na de mindegy is.
Köszönöm mindenkinek a segítséget!
Megnéztem de annyit látok rajta,hogy esik. Viszont nem tudom, hogy a szán mozgáshoz megkora nyomatékigény társul,szóval zsákutca. Megnyugtató az,hogy azt mondjátok : többre nem képes ez a motor. Tehát akkor nincs itt hiba,csak a cél volt túl optimistán kijelentve. Ha nem tudott volna ennél jóval többet,nem is lennék fennakadva...na de mindegy is.
Köszönöm mindenkinek a segítséget!
Cím: Re:Léptetőmotor
Írta: s2k5ycubj Dátum 2012 április 11, 14:55
Írta: s2k5ycubj Dátum 2012 április 11, 14:55
Szia! Én ránéznék a tápra is terhelés alatt,lehet meg fogsz lepődni. És nézd meg a tápfeszt a vezérlő bemenetén is,hogy a kábelen mennyi esik.Egy jó multiméterre azért szükség lesz.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 április 11, 15:46
Írta: besirkyjh Dátum 2012 április 11, 15:46
Pár tized Nm igénye van ha már mozog .
Csak azt akartam mondani a nyomatékábrával hogy hiába a 3Nm-es léptetö ha egy pl 1.7Nm -es kb 1000fordulaton közel dupla akkora nyomatékot ad mint a 3Nm-es .
Most elvileg 0.005mm a felbontásod és mi van ha ezt "lerontod" 0.01mm-re , mivan ha nem használsz áttételt csak 1:1-ben hajtol át oldalrol ?
Csak azt akartam mondani a nyomatékábrával hogy hiába a 3Nm-es léptetö ha egy pl 1.7Nm -es kb 1000fordulaton közel dupla akkora nyomatékot ad mint a 3Nm-es .
Most elvileg 0.005mm a felbontásod és mi van ha ezt "lerontod" 0.01mm-re , mivan ha nem használsz áttételt csak 1:1-ben hajtol át oldalrol ?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 április 21, 17:27
Írta: 000000000 Dátum 2012 április 21, 17:27
Sziasztok!
Egy nagyon erdekes kerdesre keresek valaszt.
Van egy felig automatizalt himzesre kifejlesztett varrogepem, amin talalhato 3 encoderes leptetomotor. A gep X es Y tengelyen kepes mozgatni az asztalt, mig a 3 ik motor az anyag behuzasara van kitallava.
En az anyagot 3-5mm es oltesekkel varrom. A problemam az hogy a gep korigal. Tehat ha vhol kihagy egy oltest akkor azt a gep eszre veszi es a kovetkezonel korigalja, igy megtortenhet az hogy nagyobb oltesek jelennek meg mint az kivant hosszusag. Ez ugy van megoldva hogy a gep a control unitbol kikuld egy impulzust az encoderes leptetomotor fele, mig a motor is kuld egy impulzust a CU fele, majd ezt softosan osszehasonlitja a gep. Ha a ket impulzus megegyezik a gep nem korigal hisz nem eszlelt hibat, ha elterest eszlel akkor a kovetkezo oltest mar hosszabra csinalja.
Nekem az lenne a fontos hogy tartsa a gep a kivant oltes hosszusagot es valami elektronikai megoldassal becsapni a gep softjat.
Ugyanazt az impluzust kellene eloalitani a motortol mint amit kikuld a CU es igy a gep nem latna kulonbseget.
Szoval azt szeretnem toletek kerdezni, hogy van valakinek otlete hogy hogyan tudnam atverni a gepet?
Egy elmeletet keresek egy jo otletet!
Kerlek ha valakinek barmilyen otlete van irja meg nekem, nagyon sokat segitene.
Elore is koszonok minden hozzaszolast!
Egy nagyon erdekes kerdesre keresek valaszt.
Van egy felig automatizalt himzesre kifejlesztett varrogepem, amin talalhato 3 encoderes leptetomotor. A gep X es Y tengelyen kepes mozgatni az asztalt, mig a 3 ik motor az anyag behuzasara van kitallava.
En az anyagot 3-5mm es oltesekkel varrom. A problemam az hogy a gep korigal. Tehat ha vhol kihagy egy oltest akkor azt a gep eszre veszi es a kovetkezonel korigalja, igy megtortenhet az hogy nagyobb oltesek jelennek meg mint az kivant hosszusag. Ez ugy van megoldva hogy a gep a control unitbol kikuld egy impulzust az encoderes leptetomotor fele, mig a motor is kuld egy impulzust a CU fele, majd ezt softosan osszehasonlitja a gep. Ha a ket impulzus megegyezik a gep nem korigal hisz nem eszlelt hibat, ha elterest eszlel akkor a kovetkezo oltest mar hosszabra csinalja.
Nekem az lenne a fontos hogy tartsa a gep a kivant oltes hosszusagot es valami elektronikai megoldassal becsapni a gep softjat.
Ugyanazt az impluzust kellene eloalitani a motortol mint amit kikuld a CU es igy a gep nem latna kulonbseget.
Szoval azt szeretnem toletek kerdezni, hogy van valakinek otlete hogy hogyan tudnam atverni a gepet?
Egy elmeletet keresek egy jo otletet!
Kerlek ha valakinek barmilyen otlete van irja meg nekem, nagyon sokat segitene.
Elore is koszonok minden hozzaszolast!
Cím: Re:Léptetőmotor
Írta: eivmhrm04 Dátum 2012 április 21, 17:30
Írta: eivmhrm04 Dátum 2012 április 21, 17:30
Próbálkozz a Snecinél,nagy mágus az ilyesmiben.De mostanában nagyon be van havazva
Cím: Re:Léptetőmotor
Írta: wcsxp0uxa Dátum 2012 április 21, 17:39
Írta: wcsxp0uxa Dátum 2012 április 21, 17:39
Szia !
Szerintem ezt azért csinálja így ,hogy a mintát alakját tartani tudja. Azt meglehet csinálni ,hogy minden jelnél visszaküldje a megfelelő jelet , de lépéstévesztésnél torzulni fog a minta. Azt ,hogy a nagy öltés helyett 2 kicsit csináljon azt utólag nehéz megvalósítani(szoftveresen). Lehet megoldás lenne szervóra kicserélni a léptecseket + jel visszaküldés.
Szerintem ezt azért csinálja így ,hogy a mintát alakját tartani tudja. Azt meglehet csinálni ,hogy minden jelnél visszaküldje a megfelelő jelet , de lépéstévesztésnél torzulni fog a minta. Azt ,hogy a nagy öltés helyett 2 kicsit csináljon azt utólag nehéz megvalósítani(szoftveresen). Lehet megoldás lenne szervóra kicserélni a léptecseket + jel visszaküldés.
Cím: Re:Léptetőmotor
Írta: xfg6v697j Dátum 2012 április 21, 17:54
Írta: xfg6v697j Dátum 2012 április 21, 17:54
Ha step/dir-es a vezérlés,akkor a multkor belinkeltem egy stepdir enkóder átalakító kapcsolást .Azzal be lehetne csapni,mivel közvetlen a kikűldöt impulzusból képezné a visszajelzést.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 április 21, 18:37
Írta: 000000000 Dátum 2012 április 21, 18:37
Koszonom a tippet!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 április 21, 18:42
Írta: 000000000 Dátum 2012 április 21, 18:42
Szia! Eloszor is koszonom a valaszod! En egyenesen varrok vele nem himzesre hasznalom. Nekem az a fontos hogy a gep ne vegezzen korrekciokat, tartsa a varras egesz folyamata alatt a 3mm es oltes nagysagot. A gep softjan nem tudok valtoztatni ezert kellene becsapni elektronikaval. Erre szeretnek vmi otletet kapni!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 április 21, 18:44
Írta: 000000000 Dátum 2012 április 21, 18:44
Koszonom szepen a valaszod! Nem nagyon talalom azt a kapcsolast illetve nem is tudom hogy hogyan keressem. :( Megkerlek nem kuldod el ismet. Elore is koszonom.
Cím: Re:Léptetőmotor
Írta: xfg6v697j Dátum 2012 április 21, 19:32
Írta: xfg6v697j Dátum 2012 április 21, 19:32
Cím: Re:Léptetőmotor
Írta: Kicsa Dátum 2012 április 21, 19:32
Írta: Kicsa Dátum 2012 április 21, 19:32
Van egy /szerintem/ elég jó multiméter,nem 990 Ft-os. Ránézek a tápra majd,valóban még nem mértem terhelés alatt.
Kulcsár Zoli!
A motor felfogás és a tengely elhelyezés miatt muszáj szyjjat használni. Kitérő tengelyek. A tengelytáv állítása is minimális,így maximum azt tudnám,hogy a nagy kereket csökkentem,a picit pedig növelem. Ez jó is lenne,de akkor a motortartón kellene reszelnem,no meg 2 új kereket vennem.
De megfontolom...
Köszönöm szépen mindenkinek!
Jelenleg a mechanikával foglalkozom,ezért írtam ilyen későn,elnézést érte!
Kulcsár Zoli!
A motor felfogás és a tengely elhelyezés miatt muszáj szyjjat használni. Kitérő tengelyek. A tengelytáv állítása is minimális,így maximum azt tudnám,hogy a nagy kereket csökkentem,a picit pedig növelem. Ez jó is lenne,de akkor a motortartón kellene reszelnem,no meg 2 új kereket vennem.
De megfontolom...
Köszönöm szépen mindenkinek!
Jelenleg a mechanikával foglalkozom,ezért írtam ilyen későn,elnézést érte!
Cím: Re:Léptetőmotor
Írta: 3ihs2v23 Dátum 2012 április 21, 23:24
Írta: 3ihs2v23 Dátum 2012 április 21, 23:24
Sziasztok! Van négy Nema 0,5 Nm es léptető motorom és egy H2 vezérlőm. Működés közben a motor megálláskor néha idegesítően zizeg, de nem minden megállásnál. Érdekes, hogy a H2 4 tengelyes vezérlő és a zizegés csak az egyik tengelynél jelentkezik. Ha a négy motort megcserélem, akkor is ugyan az a tengely zizeg. Próbáltam 1/1, 1/2, 1/8, 1/16 lépés jumpereléssel de mindegyiknél zizeg az egyik. Ez normális jelenség, vagy valahogy meg lehet szüntetni?
Cím: Re:Léptetőmotor
Írta: zoli0302 Dátum 2012 május 01, 22:48
Írta: zoli0302 Dátum 2012 május 01, 22:48
Szia !
Ha Yuki gyártmány akkor tegyél egy szigetelőt a szálrángató rugó alá és akkor nem számolja a hibás öltéseket.
Ha Yuki gyártmány akkor tegyél egy szigetelőt a szálrángató rugó alá és akkor nem számolja a hibás öltéseket.
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2012 május 26, 20:17
Írta: c2nsu773m Dátum 2012 május 26, 20:17
MSDD-40-3.2 digitális verzió, mely a Pro-Tuner szoftverrel programozható.
Mi a külömbség a két vezérlő között??
Léptetőmotor vezérlő V-type
Mi a külömbség a két vezérlő között??
Léptetőmotor vezérlő V-type
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 május 30, 14:16
Írta: 000000000 Dátum 2012 május 30, 14:16
Sziasztok!
TB6560-nak hajtok meg léptetőmotort (közvetlenül a tengelyt hajtja, 1/8 mikrostep, 1.8°, 3A). Szépen megy, nem zúg, nem rezonál, nem ugrik meg, de ha megáll, akkor sivít, sípol, kicsit rezeg, vagy szép csendes, attól függ, milyen kedve van (oda-vissza lépegetve más-más állapotban áll meg). Ez mitől lehet?
TB6560-nak hajtok meg léptetőmotort (közvetlenül a tengelyt hajtja, 1/8 mikrostep, 1.8°, 3A). Szépen megy, nem zúg, nem rezonál, nem ugrik meg, de ha megáll, akkor sivít, sípol, kicsit rezeg, vagy szép csendes, attól függ, milyen kedve van (oda-vissza lépegetve más-más állapotban áll meg). Ez mitől lehet?
Cím: Re:Léptetőmotor
Írta: 9pk59nuy Dátum 2012 május 31, 20:56
Írta: 9pk59nuy Dátum 2012 május 31, 20:56
Ki tudja, hogy az rs232 csatlakozóval rendelkező Klavios léptető meghajtó miben különbözik az eddigiektől? Mit kell paraméterezni?
Cím: Re:Léptetőmotor
Írta: me3ua0a6 Dátum 2012 május 31, 21:26
Írta: me3ua0a6 Dátum 2012 május 31, 21:26
Mikrolépésben használod és valószínüleg kevés a tartóáram.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 május 31, 21:40
Írta: 000000000 Dátum 2012 május 31, 21:40
Minden megoldható a DIP-kapcsolókkal, mint eddig.
Amit a szoftver még tud:
- mikrolépés 1-512 között 1-es lépésekben változtatható
- tartóáram 0.1A-ként állítható
- 36-288rpm fordulat között finomhangolható a meghajtó a rezonanciák csökkentésére.
Amit a szoftver még tud:
- mikrolépés 1-512 között 1-es lépésekben változtatható
- tartóáram 0.1A-ként állítható
- 36-288rpm fordulat között finomhangolható a meghajtó a rezonanciák csökkentésére.
Cím: Re:Léptetőmotor
Írta: 9pk59nuy Dátum 2012 május 31, 22:42
Írta: 9pk59nuy Dátum 2012 május 31, 22:42
Köszönöm a választ. Ma vettem egyet,és csak néztem az rs232-re mint a legújabb megtanulnivalóra. Örülök a hagyományos állítási lehetőségnek (mert egyszerű).
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2012 június 03, 21:31
Írta: xkbv3nx0d Dátum 2012 június 03, 21:31
Új gép építését tervezem, és az érdekelne, hogy van-e értelme léptetőmotorokat enkóderesre kialakítani? illetve mondjuk a jövőb en emc2-re váltanék... ha jól láttam azt írták valahol, hogy képes direktbe az lpt-re visszaadott enkóder jelet lekezelni...
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 június 22, 07:06
Írta: ANTAL GÁBOR Dátum 2012 június 22, 07:06
Egy érdekes dologgal szembesültem: 4.5Nm es léptető ( német, enkóderes, ipari ) 70V os táppal nagy Klaviós vezérlővel hajt egy kis eszterga hossz szánt. ( 1600 as mikrolépéssel) Áram limit 4 A .Tartóáram 50% Ha leveszem az előtolási sebességet egy kis értékre akkor kapkod ugrál ide oda rángat. Ha megszüntetem mechanikai terhelést ( szétkuplungolok) akkor is csinálja Ha nagyobb áramot állítok akkor megszűnik.
Van olyan rezonancia ami épp a kis sebességeknél jön létre? Mivel lehet védekezni? Szeretném ismerni a villamos okokat
Nem tetszik az áram növelési szisztéma mert üzemszerűen nem indokolt és felesleges melegít
Van olyan rezonancia ami épp a kis sebességeknél jön létre? Mivel lehet védekezni? Szeretném ismerni a villamos okokat
Nem tetszik az áram növelési szisztéma mert üzemszerűen nem indokolt és felesleges melegít
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 június 22, 16:20
Írta: besirkyjh Dátum 2012 június 22, 16:20
Szia Gábor
Probáld meg erösebben terhelni a léptetö tengelyét ( szoritsd össze a kezeddel ) .Valoszinü hogy a nagy áram miatt tul lendül mechanikusan a poziciojábol .Egy jobban elöfeszitett orsoanya segithet a dolgon .
Esetleg még a hosszabb rámpa is segithet ( joval hosszabb ) a motor tuningban .
Probáld meg erösebben terhelni a léptetö tengelyét ( szoritsd össze a kezeddel ) .Valoszinü hogy a nagy áram miatt tul lendül mechanikusan a poziciojábol .Egy jobban elöfeszitett orsoanya segithet a dolgon .
Esetleg még a hosszabb rámpa is segithet ( joval hosszabb ) a motor tuningban .
Cím: Re:Léptetőmotor
Írta: x4rhew5r3 Dátum 2012 június 22, 16:23
Írta: x4rhew5r3 Dátum 2012 június 22, 16:23
Nem a sebesség az érdekes ebben az esetben, hanem a lépésfrekvencia. Csináld meg légy szíves azt a kísérletet, hogy leveszed 800-ra a mikrolépést. Várhatóan dupla akkora sebességnél jelentkezik ez a rezonancia.
Direkt vagy szíjhajtás? Ha szíj, akkor puha vagy kemény szíj?
Ha kicsi a tartóáram, akkor jobban érvényesül a mechanikai rezonancia, mert egy "gyengébb rugóval" akarod megfogni a lengésre hajlamos forgórészt.
De az is lehet, hogy egészen másról van szó! Azt mondod ugrál ide oda. Ez mintha zavar lenne a step és dir bemeneten. Ha erről van szó, akkor nagyobb sebességen is mérhető a pozíció hiba. Milyen illesztés van az LPT portról?
Direkt vagy szíjhajtás? Ha szíj, akkor puha vagy kemény szíj?
Ha kicsi a tartóáram, akkor jobban érvényesül a mechanikai rezonancia, mert egy "gyengébb rugóval" akarod megfogni a lengésre hajlamos forgórészt.
De az is lehet, hogy egészen másról van szó! Azt mondod ugrál ide oda. Ez mintha zavar lenne a step és dir bemeneten. Ha erről van szó, akkor nagyobb sebességen is mérhető a pozíció hiba. Milyen illesztés van az LPT portról?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 június 22, 16:52
Írta: besirkyjh Dátum 2012 június 22, 16:52
Szia
Igen igen .Régen volt téma a kézben tartott blokkolo léptetömotor :) ! ( föleg a nagyok ) .
Igen igen .Régen volt téma a kézben tartott blokkolo léptetömotor :) ! ( föleg a nagyok ) .
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 június 22, 19:45
Írta: ANTAL GÁBOR Dátum 2012 június 22, 19:45
Köszönöm a válaszokat ( Kulcsár Zolinak is ) sikerült elhangolni. Az biztos hogy nem Pc ből jövő probléma, párhuzamos port driverrel van illesztve. A kinematika: direkt ( kottyanásmentes kuplungos ) meghajtás.Tegnap volt olyan mintha géppuskázott volna. ( talán a legjobban egy olyan fém fogaskerekes hajtáshoz hasonlított aminél ki vannak törve a fogak. Viszi kattan ugrik előrelendül visszaugrik . Aztán elállítgattam az áramot a tartóáramot és ma csak nehezen tudtam reprodukálni . Tévedtem a mikrolépéssel : 1200 as volt ( kevés vezérlő tudja de 3mm az emelkedés. Ma fölraktam 2400 ra és vadászom hogy mikor jön elő . Egyébként van egy 200 as ( nem tévedés) peremű angol léptetőm ( kb akkora mint egy 300 wattos régi 3f motor ) annál is tapasztaltam ( igaz terheletlenül) Arra már tegnap rájöttem hogy ha nagyobb tartóáramot állítok akkor javul. ( de a 100% ot azért luxusnak és okafogyottnak ítélem ( akkor minek a missing detektor )
Cím: Re:Léptetőmotor
Írta: KoLa Dátum 2012 június 22, 22:49
Írta: KoLa Dátum 2012 június 22, 22:49
Szia Gábor!
Nálam az esztergán 12Nm-s léptetetőnél 5000lépés/fordulatnál állapodtam meg, ui itt tudom kikerülni azt a léptetési frekvenciát ahol ilyen csúnya rezonancia létrejön, kerülöm a 170mm/min előtolás értéket,és így nincs rezonancia!a többi jó!Kísérletezni kell![#wave]
Nálam az esztergán 12Nm-s léptetetőnél 5000lépés/fordulatnál állapodtam meg, ui itt tudom kikerülni azt a léptetési frekvenciát ahol ilyen csúnya rezonancia létrejön, kerülöm a 170mm/min előtolás értéket,és így nincs rezonancia!a többi jó!Kísérletezni kell![#wave]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 június 23, 11:14
Írta: 000000000 Dátum 2012 június 23, 11:14
Nálam kis motornál jelentkerett ilyen hiba és egyszerűen csak a step jelet kellett invertálni a programban és megszünt a rezonancia.
Cím: Re:Léptetőmotor
Írta: mma6fim4 Dátum 2012 július 01, 20:33
Írta: mma6fim4 Dátum 2012 július 01, 20:33
Sziasztok
Épp ma fejeztem be egy három tengelyes szerszámköszörű gépet. Mivel nem vagyok valami komoly guru a léptetőmotoros meghajtásokkal lenne egy kérdésem. Hálás lennék ha valaki segítene.
A jelenlegi konfig a szokásos 700-as fordulaton üzemel. Mivel ez egy ipari gép a termelékenységét nagyban befolyásolja a mozgási sebessége, viszont maradnék a léptetőmotornál. A kérdésem az lenne, hogy a nagyobb sebesség elérése (láttam a youtube-on 2500-as sebességű mozgást is léptetőmotorral)mitől függ? Az motoron, vagy netán az elektronikán? Előre is köszi a választ...
Épp ma fejeztem be egy három tengelyes szerszámköszörű gépet. Mivel nem vagyok valami komoly guru a léptetőmotoros meghajtásokkal lenne egy kérdésem. Hálás lennék ha valaki segítene.
A jelenlegi konfig a szokásos 700-as fordulaton üzemel. Mivel ez egy ipari gép a termelékenységét nagyban befolyásolja a mozgási sebessége, viszont maradnék a léptetőmotornál. A kérdésem az lenne, hogy a nagyobb sebesség elérése (láttam a youtube-on 2500-as sebességű mozgást is léptetőmotorral)mitől függ? Az motoron, vagy netán az elektronikán? Előre is köszi a választ...
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2012 július 01, 21:16
Írta: Miki2 Dátum 2012 július 01, 21:16
Léptető motorokkal, 5 mm-es orsó emelkedéssel az 5000 mm/perc sebességet gond nélkül el lehet érni.
Ehhez megfelelő teljesítményű motorok, és a hozzájuk illő vezérlők kellenek.
Ettől nagyobb sebességet nagyobb emelkedéső orsóval lehet elérni.
Ehhez megfelelő teljesítményű motorok, és a hozzájuk illő vezérlők kellenek.
Ettől nagyobb sebességet nagyobb emelkedéső orsóval lehet elérni.
Cím: Re:Léptetőmotor
Írta: s2k5ycubj Dátum 2012 július 01, 21:19
Írta: s2k5ycubj Dátum 2012 július 01, 21:19
Üdvözlünk köreinkben Balázs! Ha mondanál (írnál) magadról néhány mondatot...[#integet2][#integet2]
Cím: Re:Léptetőmotor
Írta: mma6fim4 Dátum 2012 július 01, 21:22
Írta: mma6fim4 Dátum 2012 július 01, 21:22
Nos. Magamról annyit, hogy célgépeket tervezek és gyártok. Most vágtam bele először egy cnc gép építésének. Történetesen ez a gép amiről szó van egy saját használatú köszörűgép, amin nyílhegyeket köszörülök tömeggyártásban.
Cím: Re:Léptetőmotor
Írta: mma6fim4 Dátum 2012 július 01, 21:24
Írta: mma6fim4 Dátum 2012 július 01, 21:24
Köszönöm a választ. A készlet amit vettem egy kínai cucc. http://www.ebay.com/itm/3Axis-CNC-NEMA34-Stepper-Motor-Driver-878-oz-DUAL-SHAFT-/190515478205?pt=LH_DefaultDomain_0&hash=item2c5b9b7ebd
Bizonyára nem a legjobb, de ha esetleg lenne valami módja hogy egy kicsit gyorsabb legyen, mint 700mm/perc örülnék neki. A golyósorsó emelkedése 5mm. A héten teszek fel a gépről egy fotót, illetve egy kis videót.
Bizonyára nem a legjobb, de ha esetleg lenne valami módja hogy egy kicsit gyorsabb legyen, mint 700mm/perc örülnék neki. A golyósorsó emelkedése 5mm. A héten teszek fel a gépről egy fotót, illetve egy kis videót.
Cím: Re:Léptetőmotor
Írta: mma6fim4 Dátum 2012 július 01, 21:40
Írta: mma6fim4 Dátum 2012 július 01, 21:40
Az a kérdés hogy ennél a kit-nél vajon mi lehet a gyenge keresztmetszet a nagyobb sebesség elérésének érdekében..
Cím: Re:Léptetőmotor
Írta: Csaby Dátum 2012 július 02, 06:24
Írta: Csaby Dátum 2012 július 02, 06:24
Ebben a rendszerben van még tartalék. A tápfeszültség 80 Voltra emelésével - amire a driverek méretezve vannak - jelentős sebesség növekedést fogsz elérni.
Cím: Re:Léptetőmotor
Írta: mma6fim4 Dátum 2012 július 02, 06:42
Írta: mma6fim4 Dátum 2012 július 02, 06:42
Köszönöm, megkísérlem....
Cím: Re:Léptetőmotor
Írta: mma6fim4 Dátum 2012 július 02, 07:24
Írta: mma6fim4 Dátum 2012 július 02, 07:24
Mivel a gépem alapvető értelme a mind nagyobb termelékenység lenne, a mozgási sebesség maximuma igen lényeges. Ugyan ezt a kit-et most vettem, ám ha kell veszek egy másikat amennyiben ezzel a min. 2500mm/min sebességet nem lehet elérni. A tápegység jelenlegi feszültsége 60V. Tudnátok esetleg olyan összeállítást ajánlani amivel el lehet érni ezt a sebességet? Ugyan én azért vagyok itt hogy tanuljak ebben a témában, de igyekszem hozzá is tenni valamit az oldalhoz, szóval hamarosan jönnek a fotók, és a videó.... Előre is köszi
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 július 02, 08:10
Írta: s7manbs8 Dátum 2012 július 02, 08:10
Szerintem szervó kellene neked, abból is minél jobb, ha nem tévedek.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 július 02, 08:26
Írta: 000000000 Dátum 2012 július 02, 08:26
Nulladik lépés az, hogy nézd meg a motorod gyári fordulatszám-nyomaték jelleggörbéjét. Ha ilyened nincs, mérd ki. Ezt próbáld meg minél inkább optimalizálni.
Utána pedig a mozgatandó tömegek, orsó paraméterek alapján egy hajtásméretezés se ártana, ahol kiderül a rendszered gyorsulási optimumpontja, maximuma.
Utána pedig a mozgatandó tömegek, orsó paraméterek alapján egy hajtásméretezés se ártana, ahol kiderül a rendszered gyorsulási optimumpontja, maximuma.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 július 02, 08:28
Írta: besirkyjh Dátum 2012 július 02, 08:28
Szia
Figyelmen kivül hagytad a Miki2 irását ?
Bár kellene ég info legalább a mozgatott tömegröl és a linek fajtájárol de szinte biztos hogy simán eléred vele a kivánt sebességet ( sött szerintem a dupláját is ) .
Csinálj egy probát és ha kevesled akkor még mindig ott van a táp növelés lehetösége .
Lehetne még fokozni mondjuk egy 2:1 áttételel de ahhoz látni kellene a mechanikádat !!
Figyelmen kivül hagytad a Miki2 irását ?
Bár kellene ég info legalább a mozgatott tömegröl és a linek fajtájárol de szinte biztos hogy simán eléred vele a kivánt sebességet ( sött szerintem a dupláját is ) .
Csinálj egy probát és ha kevesled akkor még mindig ott van a táp növelés lehetösége .
Lehetne még fokozni mondjuk egy 2:1 áttételel de ahhoz látni kellene a mechanikádat !!
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2012 július 02, 22:00
Írta: c2nsu773m Dátum 2012 július 02, 22:00
Van pár bontott SLA 7026M /4305 ic léptetőmotorokat hajtottak.
Érdemes foglalkozni velük?
Érdemes foglalkozni velük?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 július 02, 23:44
Írta: s7manbs8 Dátum 2012 július 02, 23:44
Ha nincs kipukkanva ... :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 július 03, 02:11
Írta: 000000000 Dátum 2012 július 03, 02:11
Szerintem az 5 ezer kicsit el van túlozva 5 mm orsóval.
Ha, 2: 1 áttételt tesz, akkor, kb. 2 - 2,2 ezer körüli sebességre, számíthat max.
Több dolgot is tudni kellene, a továbblépéshez.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 július 03, 02:12
Írta: 000000000 Dátum 2012 július 03, 02:12
Szívesen segítenék személyesen, ha nem laksz túl messze hatvantól.
Cím: Re:Léptetőmotor
Írta: mma6fim4 Dátum 2012 július 03, 06:49
Írta: mma6fim4 Dátum 2012 július 03, 06:49
Köszönöm a válaszokat mindenkinek. Sajnos messze vagyunk egymástól. Én Veszprémi vagyok. Pedig jó lett volna ha van valaki akivel a közelben eszmét tudok cserélni. Hamarosan tervezek egy másik még termelékenyebb gépet, arra már kinéztem a servokat. Úgyis az lesz a tuti megoldás....
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 július 03, 08:50
Írta: besirkyjh Dátum 2012 július 03, 08:50
Szia Danibá
A Miki azt irta hogy 5mm-es emelkedésü orsoval 5000mm/min sebességet gondnélkül ellehet érni .
Erre irtam hogy én még fokoznám egy 2:1 áttéltelel .
Ezt a ketöt Te összekombináltad ? :)
A Miki azt irta hogy 5mm-es emelkedésü orsoval 5000mm/min sebességet gondnélkül ellehet érni .
Erre irtam hogy én még fokoznám egy 2:1 áttéltelel .
Ezt a ketöt Te összekombináltad ? :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 július 03, 15:40
Írta: 000000000 Dátum 2012 július 03, 15:40
Az utóbit azért nem mondanám fixre. Ha erre jársz, mutatok neked marógépet léptetőmotorral. Húsz ezer feletti sebességgel tud menni.
Nem, ennyire fekete, fehér a dolog.
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2012 július 03, 18:33
Írta: Miki2 Dátum 2012 július 03, 18:33
Szervusz Danibá!
Én építettem gépet úgy, hogy léptető motorral áttétel nélkül 18.000 mm/perc sebességet tudtam elérni.
Üzemszerűen lépésvesztés nélkül tudott 15.000 mm/perc sebességet.
Mindez 6,4 Nm-es motorokkal, MSD 90-8.2 vezérlőkkel, saját készítésű trap 25x10 mm-es orsókkal, saját készítésű kottyanásmentes anyákkal.
Ezért írtam, ha meg van neki adva ami jár neki, akkor ez gond nélkül működik.
Kipróbáltam, stabilan mőködik.
Még valami:
Az asztalmérete 1600x1400 mm, zártszelvény vázon.
1.800 W-os fóorsó motorral,12 mm-es maróval a bútorlapot, vahy a 18 mm-e4s MDF lapot egy fogásból átvágja 2.000 mm/perces előtolással.
Én építettem gépet úgy, hogy léptető motorral áttétel nélkül 18.000 mm/perc sebességet tudtam elérni.
Üzemszerűen lépésvesztés nélkül tudott 15.000 mm/perc sebességet.
Mindez 6,4 Nm-es motorokkal, MSD 90-8.2 vezérlőkkel, saját készítésű trap 25x10 mm-es orsókkal, saját készítésű kottyanásmentes anyákkal.
Ezért írtam, ha meg van neki adva ami jár neki, akkor ez gond nélkül működik.
Kipróbáltam, stabilan mőködik.
Még valami:
Az asztalmérete 1600x1400 mm, zártszelvény vázon.
1.800 W-os fóorsó motorral,12 mm-es maróval a bútorlapot, vahy a 18 mm-e4s MDF lapot egy fogásból átvágja 2.000 mm/perces előtolással.
Cím: Re:Léptetőmotor
Írta: mma6fim4 Dátum 2012 július 03, 20:21
Írta: mma6fim4 Dátum 2012 július 03, 20:21
Gödöllőre járok időnként. Feltétlen átugranék majd.
Cím: Re:Léptetőmotor
Írta: mma6fim4 Dátum 2012 július 03, 20:30
Írta: mma6fim4 Dátum 2012 július 03, 20:30
Az a helyzet hogy az 5mm emelkedéshez azért ragaszkodnék mert ennek a gépnek a lehetőségekhez képest 0,01 vagy 0,005 pontosnak kell lennie. Tudom hogy a 256 mikrostep lépés elég lehet ehhez a pontossághoz egy 10mm emelkedésű orsó esetén, de valahogy idegenkedem tőle. De ha az 5mm veszem alapul az általam kíván 2500mm/perc sebesség akkor ezek szerint ezzel is elérhető. Amit viszont nem értek. Ha a mozgási sebesség egyik fontos kritériuma a mechanika ellenállása, akkor a 10mm-es emelkedés épp az kívánt eredmény ellen hat, hiszen így az asztal mozgásához még nagyobb nyomatékra van szükség. Ezek szerint mégsem a mechanikai ellenállás a titok? Akkor mégis mi az a titok ami a 7-900 illetve a 2500-as sebesség között rejtőzik? Ha emelem a táp feszültségét az vélhetően arányos sebesség növekedést fog okozni gondom.....Mégegyszer kösz az eddigi válaszokat....
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 július 03, 20:45
Írta: 000000000 Dátum 2012 július 03, 20:45
A tápfesz emelésével nem fogsz sebességet emelni. A léptetőnél a step jel frekvenciája határozza meg a motor fordulatát, ezáltal a sebességet. A fesz emelésével csak a motor stabil terhelt futását tudod befojásolni bizonyos határok közt.
Egyébként pedig az általad elvárt pontosság csak egy elméleti szám. Ha nem 5mm-es orsót használsz, hanem 4 vagy 6mm-t akkor is el tudod érni ezt a pontosságot elméletben. A gyakorlatban egyik megoldással sem biztos. Mind attól függ, hogy a mechanika mennyire milyen. Az orsó és anya kapcsolata milyen. A tengelyek mennyire futnak kottyanásmentesen.
Egyébként pedig az általad elvárt pontosság csak egy elméleti szám. Ha nem 5mm-es orsót használsz, hanem 4 vagy 6mm-t akkor is el tudod érni ezt a pontosságot elméletben. A gyakorlatban egyik megoldással sem biztos. Mind attól függ, hogy a mechanika mennyire milyen. Az orsó és anya kapcsolata milyen. A tengelyek mennyire futnak kottyanásmentesen.
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2012 július 03, 20:50
Írta: Miki2 Dátum 2012 július 03, 20:50
A tápfeszültséget a vezérlő által megengedhető legnagyobbra kell állítani.
Arra azért számolni kell legalább 3-5 % tartalékot, hogy a hálózati fesz elég sokat ingadozik.
Nálunk álltalában 240V.
Az igazán "nagy titok" még a motorokban rejlik.
Kis nyomatékú motoroktól csodát ne várj.
A gravírozó gépemen 3.1 Nm-es motorok vannak, 70 V-os táppal.
A sebessége trap 20x5 orsókkal 7000 mm/perc.
Üzemszerűen lépésvesztés nélkül 5000 mm/perc sebességen használom.
Tehát elég sok dolgot meg kellene nézned a gépeden, hogy közelítőleg el lehessen dönteni, mi várható tőle.
Arra azért számolni kell legalább 3-5 % tartalékot, hogy a hálózati fesz elég sokat ingadozik.
Nálunk álltalában 240V.
Az igazán "nagy titok" még a motorokban rejlik.
Kis nyomatékú motoroktól csodát ne várj.
A gravírozó gépemen 3.1 Nm-es motorok vannak, 70 V-os táppal.
A sebessége trap 20x5 orsókkal 7000 mm/perc.
Üzemszerűen lépésvesztés nélkül 5000 mm/perc sebességen használom.
Tehát elég sok dolgot meg kellene nézned a gépeden, hogy közelítőleg el lehessen dönteni, mi várható tőle.
Cím: Re:Léptetőmotor
Írta: mma6fim4 Dátum 2012 július 03, 20:51
Írta: mma6fim4 Dátum 2012 július 03, 20:51
Köszi. Értem. Ha tehát 25,000Hz megy a cucc az lassabb lesz, viszont ha 45,000Hz-re állítom akkor nő a sebesség. Az a gond hogy igazán mélységében még nem tudtam tesztelni a cuccot, mert lemaradt az áramlimit beállítás és elszállt a táp :-) Épp most várom a tranzisztorokat. Viszont így legalább tudom hogy holnap hogy álljak neki a tunningnak. Golyósorsókat használok. A megmunkálás sajátosságaiból adódóan mindig egy irányból közelítem meg a CBN korongokat, azaz a backlash ki van kapcsolva. Elméletben ha nem ugrik a motor, gondolom az ismétlési pontossága megfelelő lesz.
Cím: Re:Léptetőmotor
Írta: mma6fim4 Dátum 2012 július 03, 20:56
Írta: mma6fim4 Dátum 2012 július 03, 20:56
5,6Nm -es motorokat használok. A tápot felnyomom 60V-ról 70V-re, és megalkuszom a 2500mm/min sebességben :-) Lehet hogy tényleg a frekvenciával lehet a gond. Jelenleg 35,000Hz-en próbáltam, és ott jött ki a 700-750mm/perc sebesség.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 július 03, 21:13
Írta: svejk Dátum 2012 július 03, 21:13
Ha egy hasonló, igaz drágább kittet itt Magyarországon vettél volna pl. a Klavio kft-től. akkor már rég repülne a szerkezeted.
Sokat ér ám a szaktanács :(
De hogy konstruktív is legyek...
Azt írid nyílhegyeket köszörülsz ipari szinten.
Ebből nekem az jön le hogy a mozgási terület kicsi, tehát a sebességtől nem fogsz kapni gyorsabb ciklusidőket, ha egyáltalán a rövid úthosszakon fel tudnak gyorsulni a mozgó szerkezetek. ebből adódik az is hogy lehet a gyorsulási és lassulási képességeit kellene a gépednek turbózni.
Legalább egy sacc/kb. méretek kellenének, hogy tanácsot tudjanak a fórumozók adni, vagy irányt mutatni.
Sokat ér ám a szaktanács :(
De hogy konstruktív is legyek...
Azt írid nyílhegyeket köszörülsz ipari szinten.
Ebből nekem az jön le hogy a mozgási terület kicsi, tehát a sebességtől nem fogsz kapni gyorsabb ciklusidőket, ha egyáltalán a rövid úthosszakon fel tudnak gyorsulni a mozgó szerkezetek. ebből adódik az is hogy lehet a gyorsulási és lassulási képességeit kellene a gépednek turbózni.
Legalább egy sacc/kb. méretek kellenének, hogy tanácsot tudjanak a fórumozók adni, vagy irányt mutatni.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 július 03, 21:16
Írta: svejk Dátum 2012 július 03, 21:16
Ne keverd a Mach3 kernel frekvenciáját Karasz András által említett léptető frekvenciával!
Bár az előbbi tudja korlátozni a másodikat, de ez csak nagyobb microstep esetén fog bekövetkezni.
Bár az előbbi tudja korlátozni a másodikat, de ez csak nagyobb microstep esetén fog bekövetkezni.
Cím: Re:Léptetőmotor
Írta: mma6fim4 Dátum 2012 július 03, 21:28
Írta: mma6fim4 Dátum 2012 július 03, 21:28
Nos. A helyzet az hogy kézenfekvő volt kintről megvenni, merthogy immár vagy 10éve minden külföldről szerzek be. Nem ismerem az illető céget, de a fémipari gépeket elég jól, és azt látom hogy azok bizony kínaikat, ráadásul a léptetőmotorok típusaival is találkoztam már az alibaba-án. Egy ciklus kb. 80%-ban gyorsjáratból áll. Arra jól ráéreztél, hogy viszonylag kis mozgási tartományokról van szó. Holnap amint kész a táp, és repül a cucc teszek fel képeket, és készítek egy rövid felvételt róla....
Cím: Re:Léptetőmotor
Írta: mma6fim4 Dátum 2012 július 05, 13:12
Írta: mma6fim4 Dátum 2012 július 05, 13:12
Szoktatok hűtést tenni a léptetőmotorokra? Én tettem rá, mert melegedett. Aztán persze kiderült hogy azért mert az áramlimit nem volt jól beállítva, így 7.8 ampert szabadítottam a motorral 2 helyett. Egy ilyen borda 150w teljesítményig használható, és kettőt tettem rá. Abban bízok hogy egy kicsit talán túl lehet majd hajtani a motort....Sajnos még a tápra várok, így még nem tudtam tesztelni a sebességet.

Elképzelhető hogy azért tudott csak 700mm/min sebességet a motor mert jóval nagyobb áramot kapott, ami fojtotta?
Elképzelhető hogy azért tudott csak 700mm/min sebességet a motor mert jóval nagyobb áramot kapott, ami fojtotta?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 július 05, 14:40
Írta: besirkyjh Dátum 2012 július 05, 14:40
Szia
Evileg talán lehetséges , de inkább a táp hiánya lesz ott a gond .Amit a vezérlöd még biztonságosan elbir annyi legyen a táp !
Az a 700mm/min milyen beálltásokkal jött ki ( áram + mikrostep , táp , step/mm ) ?
Evileg talán lehetséges , de inkább a táp hiánya lesz ott a gond .Amit a vezérlöd még biztonságosan elbir annyi legyen a táp !
Az a 700mm/min milyen beálltásokkal jött ki ( áram + mikrostep , táp , step/mm ) ?
Cím: Re:Léptetőmotor
Írta: mma6fim4 Dátum 2012 július 05, 16:42
Írta: mma6fim4 Dátum 2012 július 05, 16:42
A vezérlőm 7,8A-t bír 80V-on. A táp 60V-on 6,7A-t bír. De most az áramlimit miatt 2A környékén lesz a csúcs, így a három tengelyre 6A lesz. A tápom épp azért szállt el mert a vezérlő 3X7,8A-t próbálta volna a tápot terhelni.
160 step/mm, 800 mikrostep/fordulat.
160 step/mm, 800 mikrostep/fordulat.
Cím: Re:Léptetőmotor
Írta: B.Tibor Dátum 2012 július 06, 01:15
Írta: B.Tibor Dátum 2012 július 06, 01:15
Az elmúlt napokban csináltunk apámmal egy rögtönzött forgatónyomaték mérőt, amivel különböző árambeállításokkal és különböző fordulatszámokon meg tudtuk mérni viszonylag pontosan a 3 Nm-es SY60STH88-3008BF, és a 1,8 Nm-es SY57STH76-3008BF motorok forgatónyomatékát.
Megnéztünk több vezérlőt, és a legjobb eredményt a 2M542 vezérlővel kaptuk (50V, 4.2A)
ami valószínű a Klavió hasonló vezérlőjének a másolata vagy megfelelője.
A mérés menete: a motort egy adott fix fordulatszámon forgatva fokozatosan terheltük, egész addig, míg a motor lépést tévesztett, vagy megállt.
A mért adatokból diagramot készítettem:


Érdekes dolog, hogy kisebb áramon nagyobb fordulatot lehet elérni (a tesztelt vezérlővel).
Erősebb áramon a nagyobb (600 fölötti) fordulatokon rezonanciák lépnek fel, és a motor emiatt sokkal kisebb terhelést tud elviselni.
Ahogy az ábrán is látszik, érdemes kipróbálni a motort többféle áramon, és megkeresni az igényeknek leginkább megfelelő beállítást. Nem biztos, hogy a legnagyobb áram adja minden szempontból a legjobb eredményt.
Sajnos nem tudtuk kipróbálni 70-80V-os vezérlővel, ami a gyári nyomatékgörbe alapján talán még jobb eredményeket adhatna.
1,8 Nm motor 400-600 fordulaton a hálózatról (230V-ról) 130W-ot képes fogyasztani, és a 48V-on felveszi a 2-2,2 Ampert.
Megnéztünk több vezérlőt, és a legjobb eredményt a 2M542 vezérlővel kaptuk (50V, 4.2A)
ami valószínű a Klavió hasonló vezérlőjének a másolata vagy megfelelője.
A mérés menete: a motort egy adott fix fordulatszámon forgatva fokozatosan terheltük, egész addig, míg a motor lépést tévesztett, vagy megállt.
A mért adatokból diagramot készítettem:
Érdekes dolog, hogy kisebb áramon nagyobb fordulatot lehet elérni (a tesztelt vezérlővel).
Erősebb áramon a nagyobb (600 fölötti) fordulatokon rezonanciák lépnek fel, és a motor emiatt sokkal kisebb terhelést tud elviselni.
Ahogy az ábrán is látszik, érdemes kipróbálni a motort többféle áramon, és megkeresni az igényeknek leginkább megfelelő beállítást. Nem biztos, hogy a legnagyobb áram adja minden szempontból a legjobb eredményt.
Sajnos nem tudtuk kipróbálni 70-80V-os vezérlővel, ami a gyári nyomatékgörbe alapján talán még jobb eredményeket adhatna.
1,8 Nm motor 400-600 fordulaton a hálózatról (230V-ról) 130W-ot képes fogyasztani, és a 48V-on felveszi a 2-2,2 Ampert.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 július 06, 01:56
Írta: 000000000 Dátum 2012 július 06, 01:56
Köszönöm, hogy közzé tetted. Tanulságos.
Kb. 2 éve kísérletezgettem én is hasonló dologgal. Sajnos, valódi mérést nem tudtam végezni.
Következtetéseim hasonlóak voltak.
Még, érdekes lenne, különböző mikrolépésekkel. Legalább az első4-5 ben.
Viszont, továbbra is késztetést érzek, a léptetők, és vezérlők lelkivilágának megismerésére.
Ezért, érdekelne, hogyan is készült a mérőberendezés?
Ha, lehet, nekiállnék én is készíteni.
Cím: Re:Léptetőmotor
Írta: Szedlay Pál Dátum 2012 július 06, 02:46
Írta: Szedlay Pál Dátum 2012 július 06, 02:46
Nagyon jó, hogy ilyeneket közzé teszel.
Itt egy példa egy lényegesen magasabb feszültségen ( 240V )működő léptető motor nyomaték görbéjéből. Hasonló forgató nyomatékot adó motort kerestem nagyobb feszültségen. Jól látható, hogy itt kevésbé érzékeny a fordulatszámra bipoláris bekötés esetén mint nálad alacsonyabb feszültségen.
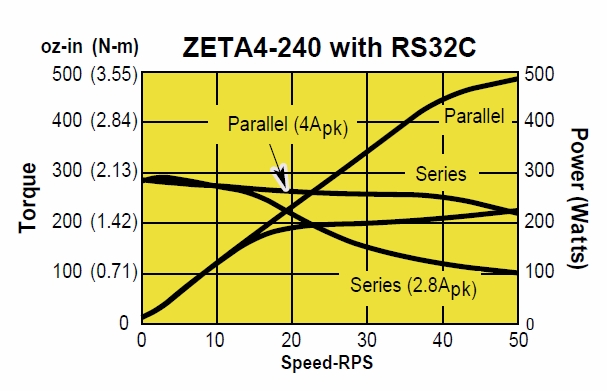
Itt egy példa egy lényegesen magasabb feszültségen ( 240V )működő léptető motor nyomaték görbéjéből. Hasonló forgató nyomatékot adó motort kerestem nagyobb feszültségen. Jól látható, hogy itt kevésbé érzékeny a fordulatszámra bipoláris bekötés esetén mint nálad alacsonyabb feszültségen.
Cím: Re:Léptetőmotor
Írta: B.Tibor Dátum 2012 július 06, 12:54
Írta: B.Tibor Dátum 2012 július 06, 12:54
Nem próbáltuk különböző mikrolépésekben, csak féllépésben próbáltuk egyszer, de nem volt olyan erős, kisebb terhelésnél megállt. Ha az ember utánagondol, féllépés esetén nagyobbak az ugrások, a motor nem megy olyan egyenletesen, mint mondjuk nyolcadlépéssel, és jobban ki lehet billenteni a motort a forgásból.
Ez a féllépés már nem az a klasszikus féllépés, amit az L298-asok és hasonló IC-k csináltak. Ez 90 fokkal eltolt szinusz-szerűen csinált féllépés, de csak két lépcsője van a szinusznak: a 0, 70.7%, és 100%.
Ez így gyengébb volt, mint a 8-as mikrolépés, amivel most a méréseket végeztük.
Legközelebb megnézzük negyed, tizedhatod, stb lépéseken is ugyanezt, hogy mennyit számítanak a mikrolépések, most már minket is érdekel.
Ez a féllépés már nem az a klasszikus féllépés, amit az L298-asok és hasonló IC-k csináltak. Ez 90 fokkal eltolt szinusz-szerűen csinált féllépés, de csak két lépcsője van a szinusznak: a 0, 70.7%, és 100%.
Ez így gyengébb volt, mint a 8-as mikrolépés, amivel most a méréseket végeztük.
Legközelebb megnézzük negyed, tizedhatod, stb lépéseken is ugyanezt, hogy mennyit számítanak a mikrolépések, most már minket is érdekel.
Cím: Re:Léptetőmotor
Írta: B.Tibor Dátum 2012 július 06, 13:03
Írta: B.Tibor Dátum 2012 július 06, 13:03
A forgónyomaték mérő nagyon egyszerű, kb 10 perc alatt elkészíthető. Nem túl szép, és lehetne még rajta tökéletesíteni, de így is egész jól lehetett vele mérni, és elég megbízhatónak tűnik, mert ha többször megismételtük a mérést, vagy másnap megmértük ugyanazt, általában ugyanazt az eredményt adta.
Csináltam róla pár fotót:
nyomatékmérő_kép1
nyomatékmérő_kép2
nyomatékmérő_kép3
nyomatékmérő_kép4
nyomatékmérő_kép5
Kell hozzá egy digitális hal mérleg, így kényelmes. Mással is meg lehet oldani, de sokkal körülményesebb az eredményt megállapítani (gondolok itt kólásüvegre, vagy más súlyokra).
A tengely 22mm átmérőjű aluminium rúd, és a lécnek van egy kis V-je, hogy ne tudjon csúszkálni a tengelyen előre-hátra.
A 3mm-es parafa lap elég jónak bizonyult, egyenletesen fékez. A fa nem jó, mert egy idő után akadozva fékez, és berágódik tőle az aluminium.
A mérés menete: kilazítjuk a szárnyasanyával az ellenfékpofát úgy, hogy ne fékezzen semmit. A halmérleget kinullázzuk, a motort elkezdjük forgatni, és óvatosan elkezdjük a két szárnyasanyával szorítani a féket összefele, egyre jobban terheljük a motort, és látszik a mérlegen, hogy egyre jobban növekszik a húzóerő.
Erőkar (ami nálunk 30 cm) * erő (kg-t átszámítani N-ba) = forgatónyomaték
A végefelé már óvatosan tekerjük a szárnyasanyát, hogy ne nyomjuk meg a kezünkkel, mert az a kis plusz terhelés is megállíthatja a motort, és így a mérést meghamisítja.
Később, ha lesz időm, egy videót is tudok róla csinálni, de azt csak két hét múlva, mert nyaralások és más teendőim vannak.
Csináltam róla pár fotót:
nyomatékmérő_kép1
nyomatékmérő_kép2
nyomatékmérő_kép3
nyomatékmérő_kép4
nyomatékmérő_kép5
Kell hozzá egy digitális hal mérleg, így kényelmes. Mással is meg lehet oldani, de sokkal körülményesebb az eredményt megállapítani (gondolok itt kólásüvegre, vagy más súlyokra).
A tengely 22mm átmérőjű aluminium rúd, és a lécnek van egy kis V-je, hogy ne tudjon csúszkálni a tengelyen előre-hátra.
A 3mm-es parafa lap elég jónak bizonyult, egyenletesen fékez. A fa nem jó, mert egy idő után akadozva fékez, és berágódik tőle az aluminium.
A mérés menete: kilazítjuk a szárnyasanyával az ellenfékpofát úgy, hogy ne fékezzen semmit. A halmérleget kinullázzuk, a motort elkezdjük forgatni, és óvatosan elkezdjük a két szárnyasanyával szorítani a féket összefele, egyre jobban terheljük a motort, és látszik a mérlegen, hogy egyre jobban növekszik a húzóerő.
Erőkar (ami nálunk 30 cm) * erő (kg-t átszámítani N-ba) = forgatónyomaték
A végefelé már óvatosan tekerjük a szárnyasanyát, hogy ne nyomjuk meg a kezünkkel, mert az a kis plusz terhelés is megállíthatja a motort, és így a mérést meghamisítja.
Később, ha lesz időm, egy videót is tudok róla csinálni, de azt csak két hét múlva, mert nyaralások és más teendőim vannak.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 július 06, 15:15
Írta: 000000000 Dátum 2012 július 06, 15:15
Köszönöm a bemutatást!
Ez, még az esetleges pontatlansága mellett is, igen jó támpontot tud adni.
Nagy előnye, a módszernek, hogy működésközbeni viselkedést mér. Messze túlmutatva a tartónyomaték mérésen.
Készítek én is egy hasonló „műszert.”
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2012 július 10, 20:30
Írta: c2nsu773m Dátum 2012 július 10, 20:30
Milyen szempontok alapján szoktátok a léptető motorokat beállítani a Mach-ban?
Mi az ideállis felbontás?
6,2mm-es menetemelkedésü trapézmenetes orsót kell meghajtania... mechanika könnyen mozgó
Mi az ideállis motormeghajtó áram? (amit a vezérlő bir?)
Mennyire melegedhet fel egy léptetőmotor?
Hogyan csökkenthető a melegedés?
Mi az ideállis felbontás?
6,2mm-es menetemelkedésü trapézmenetes orsót kell meghajtania... mechanika könnyen mozgó
Mi az ideállis motormeghajtó áram? (amit a vezérlő bir?)
Mennyire melegedhet fel egy léptetőmotor?
Hogyan csökkenthető a melegedés?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 július 10, 20:54
Írta: 000000000 Dátum 2012 július 10, 20:54
Ha a kéz még állja a meleget, az biztos OK.
Én a 6.4Nm-eseket DC 83V-al és 1600 lépés/ford felbontással járatom.
A golyósorsó 16x5-ős.
Az áramot mindig a motorhoz jumperold!
Én a 6.4Nm-eseket DC 83V-al és 1600 lépés/ford felbontással járatom.
A golyósorsó 16x5-ős.
Az áramot mindig a motorhoz jumperold!
Cím: Re:Léptetőmotor
Írta: wcsxp0uxa Dátum 2012 július 14, 07:27
Írta: wcsxp0uxa Dátum 2012 július 14, 07:27
Van egy 6.4Nm-es léptetőmotor aminek úgy megszorult a forgó része ,hogy kézzel sem bírom megtekerni . A motor 0-kilométeres , mi lehet vele? már szétszedtem ,nem találtam belül semmi sérülést , a tekercsek is rendben vannak .(azt mondták ,hogy leesett)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 július 14, 09:58
Írta: 000000000 Dátum 2012 július 14, 09:58
Csapágy.
Cím: Re:Léptetőmotor
Írta: VViktor Dátum 2012 július 14, 10:06
Írta: VViktor Dátum 2012 július 14, 10:06
Szia.Ha már szétszedted akkor nézzed meg tengelyre merőleges-e a mágnes lemezek.Mert lehet az van csak megfeszülve.
De nem tudom, hogy szetted szét,ki is vetted a hüvelyéből?
De nem tudom, hogy szetted szét,ki is vetted a hüvelyéből?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 július 14, 10:44
Írta: svejk Dátum 2012 július 14, 10:44
A motor valamelyik csapágypajzsa "kilépett" a tengelyvonalból.
Sajnos elég gyenge az alu konstrukció, illetve sokszor az illesztési perem van vacakul megmunkálva.
Türelemmel, kocogtatással visszaállítható.
Persze lehet a tengely is görbült illetve mágnesdarab is lepattanhatott.
Sajnos elég gyenge az alu konstrukció, illetve sokszor az illesztési perem van vacakul megmunkálva.
Türelemmel, kocogtatással visszaállítható.
Persze lehet a tengely is görbült illetve mágnesdarab is lepattanhatott.
Cím: Re:Léptetőmotor
Írta: wcsxp0uxa Dátum 2012 július 14, 12:12
Írta: wcsxp0uxa Dátum 2012 július 14, 12:12
Köszönöm a tippeket , végig is néztem szépen sorra . A tekercs belső lemezszegmenseit most már tüzetesen végigtapicskolva , találtam felületi hibákat ,elcsúszásokat . Biztosnak tűnik ,hogy beleér a mágnes a szegmensekbe . Na szétszedem még egyszer ,hátha a csapágyház lesz a hunyó.
Cím: Re:Léptetőmotor
Írta: krnj79r9n Dátum 2012 augusztus 05, 10:23
Írta: krnj79r9n Dátum 2012 augusztus 05, 10:23
Szervusztok,
Egy hete szenvedek egy léptetős géppel, az egész hét kálváriáját nem írnám le, mert lassan azt sem tudom honnan indultam el. Na jó, tudom még, de felesleges az összes szenvedést leírni.
Inkább azokat a konkrét megállapításokat írnám le, amire jutottam.
Előre is elnézést kérek, kicsit hosszú leszek, de bizonyos körülményeket kénytelen vagyok leírni, hogy érthető legyen.
Kérdésem, hogy ki találkozott ilyen vagy ehhez hasonló problémával és mit lehetne vele kezdeni?
Az egész onnan indult ki, hogy a gépünk bizonyos pontokon gyorsjáratban következetesen és megismételhetően mindig ugyan ott elakadt. Gyorsjárati sebesség 1500-2000 mm/min között és a gyorsulás 400 mm/s2, tehát így is elég beteg nem igazán van kihegyezve. :-)
A gép a problémás részeken sokszor még a fenti értékek felével is elakadt vagy szemmel láthatóan megtorpant egy pillanatra és úgy ment tovább (valószínűleg lépést is vesztett ekkor).
Mivel itt a cégnél van lehetőségem különböző dolgokat kipróbálni egymással, igen sok mindent kipróbáltam egymással a héten lépésről lépésre haladva. Itt van a problémás gép, Cau Cau Kompas F-800 és két darab Kompas F-1100, amiből az egyik éppen teljes átalakítás alatt, úgyhogy a vezérlői, motorjai pillanatnyilag felhasználhatók. Továbbá van még két kínai gép is, amiből szintén kiszedtem dolgokat. Az F-800 elektronikája gyakorlatilag már teljesen lecserélődött semmi sem az eredeti, még a motorok sem. Úgy számolom a sajátját is beleszámolva a negyedik számítógépről megy, sőt a probléma még csak nem is a mach3 és párhuzamos porthoz köthető.
Mert van CNC USB controller is a saját szoftverével, jelenleg arról megy, de bármikor átköthető oda-vissza, a probléma marad.
Amire rájöttem, látszólag két külön probléma:
Nagyon sok kísérletezés után jött a felismerés, mire a két problémát össze tudtam kötni azzal, ami kiváltja. Innentől kezdve nem volt olyan kaotikus, hogy hol jó, hol nem jó.
1 probléma (ami kevésbé probléma):
Egy bizonyos ponton eljutottam oda, hogy a motorokról leszedtem a golyósorsóval összekötő bordásszíjat (a motor üres tengellyel csak fel van szerelve a vázra) és a helyzet rosszabb lett. Pl. az X tengely motorja pár másodpercen belül visítva megáll. Ez volt az első meglepetés. Na jó a lényeg, ami még nagyobb meglepetés volt, ha meghúzom a motor rögzítő csavarjait az visítva megáll, ha meglazítom vagy kiteszem az asztalra egy fadarabra szépen pörög sokkal nagyobb sebességeken is. Tehát a motor amint szorosabb mechanikai kapcsolatba kerül a vázzal (egy másik épülő vázzal is) akár csak egy csavar által is, el kezd megváltozni a hangja és pár másodpercen belül visítva megáll, ha leveszem, vagy a csavart meglazítom, a motor pörög szépen. Nem lehet a motor deformációja (erre is gondoltunk), mert egy sima vaslapra (leendő motorkonzol) 4 csavarral felcsavarozva gyönyörűen megy, és ha azon keresztül a vázhoz csavarozom, megáll.
Azért írtam, hogy ez kevésbé probléma, mert viszont ha a szíjakt visrosszakom a golyósorsó és mechanika tehetetlensége folytán a motor túllendül a problémás részen és nem áll meg a teljes munkaterületen belül sem.
Szerintünk (már nem tudunk másra gondolni) rezonancia lehet. A motor és a váz egy olyan rezonáns egységet képez, hogy az a motort kizökkenti a szinkronból. Legutóbbi pénteki kísérleteim is ezt igazolják. Úgy tűnik, hogy ez egy fordulatszám tartományra (elég viszont széles sajnos) korlátozódik. Le lehet venni a fordulatszámot annyira, hogy stabilan pörögjön és egy sebességen túl szintén viszonylag stabilan megy. Ja a mikrostep-től nem függ a dolog, próbáltam 1/2, 1/4, 1/8, 1/16, lépéssel.
2. probléma
Ez az oka a gyorsjárati elakadásoknak és három napomba került, a sok csere-bere és próbálgatás között, mire felismertem az összefüggést, és ez sokkal nagyobb probléma.
Amint bármelyik tengelyre, bármennyi „Backlast” beállítok az éppen mozgó (backlast nem tartalmazó) tengely megakad, ha a „Backlash” tartalmazó tengely egyidejűleg elindul.
Például X-re beállítom a backlast, akkor ha Y megy és utána ráindítom X-et, akkor Y megakad, ha a Z ment eredetileg, akkor Z akad meg. Ez ugyan úgy igaz, ha másik tengelyre állítom a backlast. Ja, és a probléma csak akkor jelentkezik, ha irányváltás van a backlash-es tengelyen, tehát le kell pörgetnie azt a néhány plusz lépést.
Ha a backlast kikapcsolom, a gép szárnyakat kap és sokkal nagyobb sebességeken is stabilan megy bármelyik tengely bármelyik tengellyel, de sajnos jelenleg az X tengelyen 0.2 mm backlash-re lenne szükségem. Ez túl sok ahhoz, hogy kikapcsolhassam.
Hangsúlyozom a motorok már kint vannak az asztalon, nincs közük a vázhoz és mach3-mal párhuzamos portról és USB CNC kontrollerrel is csinálja. Két különböző típusú motorral és vezérlővel is.
A vezérlőm MSD50-5.6 illetve a másik a kompass F1100-ból Microstep Driver CW8060 (80V, 6A). Jelenleg a X, Z külön kapcsolóüzemű tápról (40V, 10A) és a Y megint külön tápról (36V, 9.6A).
Az első problémához hozzá tartozik, hogy próbáltam a két tápegységet sorba kötve 76V-ról meghajtva a CW8060-at és egy motort, semmi más nem volt bekötve. És úgy is az történt, hogy a vázra szerelt motor megállt, még üresben az asztalon 3100 1/min fordulatszámig ment a léptető, itt még stabil volt.
Ez jó hosszú lett. Szóval ki találkozott hasonló problémákkal?
Egy hete szenvedek egy léptetős géppel, az egész hét kálváriáját nem írnám le, mert lassan azt sem tudom honnan indultam el. Na jó, tudom még, de felesleges az összes szenvedést leírni.
Inkább azokat a konkrét megállapításokat írnám le, amire jutottam.
Előre is elnézést kérek, kicsit hosszú leszek, de bizonyos körülményeket kénytelen vagyok leírni, hogy érthető legyen.
Kérdésem, hogy ki találkozott ilyen vagy ehhez hasonló problémával és mit lehetne vele kezdeni?
Az egész onnan indult ki, hogy a gépünk bizonyos pontokon gyorsjáratban következetesen és megismételhetően mindig ugyan ott elakadt. Gyorsjárati sebesség 1500-2000 mm/min között és a gyorsulás 400 mm/s2, tehát így is elég beteg nem igazán van kihegyezve. :-)
A gép a problémás részeken sokszor még a fenti értékek felével is elakadt vagy szemmel láthatóan megtorpant egy pillanatra és úgy ment tovább (valószínűleg lépést is vesztett ekkor).
Mivel itt a cégnél van lehetőségem különböző dolgokat kipróbálni egymással, igen sok mindent kipróbáltam egymással a héten lépésről lépésre haladva. Itt van a problémás gép, Cau Cau Kompas F-800 és két darab Kompas F-1100, amiből az egyik éppen teljes átalakítás alatt, úgyhogy a vezérlői, motorjai pillanatnyilag felhasználhatók. Továbbá van még két kínai gép is, amiből szintén kiszedtem dolgokat. Az F-800 elektronikája gyakorlatilag már teljesen lecserélődött semmi sem az eredeti, még a motorok sem. Úgy számolom a sajátját is beleszámolva a negyedik számítógépről megy, sőt a probléma még csak nem is a mach3 és párhuzamos porthoz köthető.
Mert van CNC USB controller is a saját szoftverével, jelenleg arról megy, de bármikor átköthető oda-vissza, a probléma marad.
Amire rájöttem, látszólag két külön probléma:
Nagyon sok kísérletezés után jött a felismerés, mire a két problémát össze tudtam kötni azzal, ami kiváltja. Innentől kezdve nem volt olyan kaotikus, hogy hol jó, hol nem jó.
1 probléma (ami kevésbé probléma):
Egy bizonyos ponton eljutottam oda, hogy a motorokról leszedtem a golyósorsóval összekötő bordásszíjat (a motor üres tengellyel csak fel van szerelve a vázra) és a helyzet rosszabb lett. Pl. az X tengely motorja pár másodpercen belül visítva megáll. Ez volt az első meglepetés. Na jó a lényeg, ami még nagyobb meglepetés volt, ha meghúzom a motor rögzítő csavarjait az visítva megáll, ha meglazítom vagy kiteszem az asztalra egy fadarabra szépen pörög sokkal nagyobb sebességeken is. Tehát a motor amint szorosabb mechanikai kapcsolatba kerül a vázzal (egy másik épülő vázzal is) akár csak egy csavar által is, el kezd megváltozni a hangja és pár másodpercen belül visítva megáll, ha leveszem, vagy a csavart meglazítom, a motor pörög szépen. Nem lehet a motor deformációja (erre is gondoltunk), mert egy sima vaslapra (leendő motorkonzol) 4 csavarral felcsavarozva gyönyörűen megy, és ha azon keresztül a vázhoz csavarozom, megáll.
Azért írtam, hogy ez kevésbé probléma, mert viszont ha a szíjakt visrosszakom a golyósorsó és mechanika tehetetlensége folytán a motor túllendül a problémás részen és nem áll meg a teljes munkaterületen belül sem.
Szerintünk (már nem tudunk másra gondolni) rezonancia lehet. A motor és a váz egy olyan rezonáns egységet képez, hogy az a motort kizökkenti a szinkronból. Legutóbbi pénteki kísérleteim is ezt igazolják. Úgy tűnik, hogy ez egy fordulatszám tartományra (elég viszont széles sajnos) korlátozódik. Le lehet venni a fordulatszámot annyira, hogy stabilan pörögjön és egy sebességen túl szintén viszonylag stabilan megy. Ja a mikrostep-től nem függ a dolog, próbáltam 1/2, 1/4, 1/8, 1/16, lépéssel.
2. probléma
Ez az oka a gyorsjárati elakadásoknak és három napomba került, a sok csere-bere és próbálgatás között, mire felismertem az összefüggést, és ez sokkal nagyobb probléma.
Amint bármelyik tengelyre, bármennyi „Backlast” beállítok az éppen mozgó (backlast nem tartalmazó) tengely megakad, ha a „Backlash” tartalmazó tengely egyidejűleg elindul.
Például X-re beállítom a backlast, akkor ha Y megy és utána ráindítom X-et, akkor Y megakad, ha a Z ment eredetileg, akkor Z akad meg. Ez ugyan úgy igaz, ha másik tengelyre állítom a backlast. Ja, és a probléma csak akkor jelentkezik, ha irányváltás van a backlash-es tengelyen, tehát le kell pörgetnie azt a néhány plusz lépést.
Ha a backlast kikapcsolom, a gép szárnyakat kap és sokkal nagyobb sebességeken is stabilan megy bármelyik tengely bármelyik tengellyel, de sajnos jelenleg az X tengelyen 0.2 mm backlash-re lenne szükségem. Ez túl sok ahhoz, hogy kikapcsolhassam.
Hangsúlyozom a motorok már kint vannak az asztalon, nincs közük a vázhoz és mach3-mal párhuzamos portról és USB CNC kontrollerrel is csinálja. Két különböző típusú motorral és vezérlővel is.
A vezérlőm MSD50-5.6 illetve a másik a kompass F1100-ból Microstep Driver CW8060 (80V, 6A). Jelenleg a X, Z külön kapcsolóüzemű tápról (40V, 10A) és a Y megint külön tápról (36V, 9.6A).
Az első problémához hozzá tartozik, hogy próbáltam a két tápegységet sorba kötve 76V-ról meghajtva a CW8060-at és egy motort, semmi más nem volt bekötve. És úgy is az történt, hogy a vázra szerelt motor megállt, még üresben az asztalon 3100 1/min fordulatszámig ment a léptető, itt még stabil volt.
Ez jó hosszú lett. Szóval ki találkozott hasonló problémákkal?
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2012 augusztus 05, 13:12
Írta: jv7pu3a5p Dátum 2012 augusztus 05, 13:12
Lehet rezonancia is a dologban, nem tudom mennyire merev a gépváz.
Ami engem zavar az a tápod. Szerintem próbáld ki egy 36V-os 200W toroidról, az pufferelve közel 50V. Az MSD vezérlők nagyon jók, nálam 3.1Nm motorokat tekernek elég jó sebességgel, szintén 50V-ról.
Ezen kívül lehet még földhurok probléma, vagy valamilyen más vezetékezési gond, ami miatt zavart szednek össze vagy épp beültetik a tápot egy másik vezérlőnél (soros kötés).
Motorok milyenek?
Ami engem zavar az a tápod. Szerintem próbáld ki egy 36V-os 200W toroidról, az pufferelve közel 50V. Az MSD vezérlők nagyon jók, nálam 3.1Nm motorokat tekernek elég jó sebességgel, szintén 50V-ról.
Ezen kívül lehet még földhurok probléma, vagy valamilyen más vezetékezési gond, ami miatt zavart szednek össze vagy épp beültetik a tápot egy másik vezérlőnél (soros kötés).
Motorok milyenek?
Cím: Re:Léptetőmotor
Írta: wcsxp0uxa Dátum 2012 augusztus 07, 07:53
Írta: wcsxp0uxa Dátum 2012 augusztus 07, 07:53
Tudom kizártad a motor mechanikai problémáját , de éppen előtted szedtem szét 1 leesett motort.
Gyakorlatilag a motor 4 oldala téglalapból paralelogrammába ment át.Elképzelhetőnek tartom tehát, hogy a 4db felfogató csavar szabadon gyúrja át a motort ,a felfogató felület kénye kedve szerint. A leesett motor alkatrészeket méricskélve azonban Óriási pontatlanságokat találtam aminek semmi köze a leejtéshez. tehát az első csapágyházat nem mindegy hogyan rakod fel. ( a hátsót a vezetékek miatt nem lehet eltéveszteni)Most szedtem szét ebből a "drágább" típusból először ,lehet csak egyedi eset volt.
Gyakorlatilag a motor 4 oldala téglalapból paralelogrammába ment át.Elképzelhetőnek tartom tehát, hogy a 4db felfogató csavar szabadon gyúrja át a motort ,a felfogató felület kénye kedve szerint. A leesett motor alkatrészeket méricskélve azonban Óriási pontatlanságokat találtam aminek semmi köze a leejtéshez. tehát az első csapágyházat nem mindegy hogyan rakod fel. ( a hátsót a vezetékek miatt nem lehet eltéveszteni)Most szedtem szét ebből a "drágább" típusból először ,lehet csak egyedi eset volt.
Cím: Re:Léptetőmotor
Írta: krnj79r9n Dátum 2012 augusztus 07, 10:39
Írta: krnj79r9n Dátum 2012 augusztus 07, 10:39
Szia LZ,
Még egyszer elnézést LZ, hogy csak most válaszolok, akkor ebben a topic-ban folytatnám tovább.
Adott három gép:
2 db Kompas F-1100 (ebből az egyik komplett átépítés alatt, a másik még az eredeti állapotában működik)
Motor vezérlő: Microstep driver CW8060 (80V 6A)
Motor: Motion king 34HS4802 (5,8 Nm, 5A)
1 db Kompas F-800 (ezzel van a probléma)
Motor vezérlő: MSD-50-5.6
Motor: Klaviós 34SM080-050-8W-xx.xx-4.0 (4 Nm, 5A)
Az F-800 váza hegesztett zártszelvény nem túl merev, de az F-1100 alulapokból épített vázához képest mindenképpen merevebb és a munkaterülete is kisebb.
Viszont az átépítés alatt álló gép jelenleg kb. 120 kg körüli hídját idecipeltük és arra rászerelve is jelentkezett a probléma.
Az 1. problémára bemásolom a másik topic-ból azt amire tegnap jutottam:
„az üresen vázra csavarozott motor több mint valószínű, tényleg a rezonancia miatt esik ki aszinkronból. Hétvégén még azt írtam nem függ a mikrolépés beállítástól. Ez így nem teljesen igaz, nem függ olyan értelemben, hogy csinálja így is úgy is, viszont ami csak tegnap tűnt fel, hogy ez az instabil tartomány "elmászik". Elhangolható a mikrolépésekkel, tehát más fordulatszám tartományban fog jelentkezni. Sőt, mintha még felharmónikusok is lennének, több ilyen fordulatszám tartomány van ahol elakad és köztük stabilabb részek, ahol jóval nehezebben vagy egyáltalán nem akad meg. Viszont ha a szíj felkerül, a probléma megszűnik, a motor nem akad el sehol.”
2. backlash probléma továbbra is nagy gond.
Az F-800 eredeti tápja egy 500 W-os torroid, 3x10.000 mikro farad puffer és 37 V a pufferek után. Jelenleg 40V-os tápnál nincs nagyobb, egy próbát csináltam úgy, hogy a két kapcsolóüzeműt 40V+36V sorba kötve 76V-al hajtottam meg a CW8060 driverrel az X, Y-t.
Így is elakadt, de a hangja sem volt túl szép.
Visszakötve a régi torroidot is, jelenleg minden tengelynek saját tápja van.
Mach3 alatt:
Backlash nélkül a gép X, Y 2500 mm/min gyorsjárattal, és 900 mm/s2 gyorsulással úgy néz ki, hogy stabilan megy. Jelen áttételek (16x5 orsó, 1:2 lassító áttétel) mellet a léptetőnek ez 1000 1/min fordulatot jelent.
Ha bekapcsolom a backlash-t, 600 mm/min, és 100 mm/s2-re kell vissza vennem, hogy ne akadjon meg. Ez már annyira lassú, hogy borzasztó.
A motorkábelek árnyékoltak, de az árnyékolás eredetileg nem volt lekötve sehová. Én most úgy csináltam megy, ahogy az a hifi kábelezésnél is bevett szokás, hogy az árnyékot csak az egyik oldalon (földhurok elkerülése végett) a vezérlő szekrény oldalán lekötöttem a földre, ahová a tápok és a váz földelése is megy és onnan megy a betáp kábel földjére. Remélem ez így helyénvaló, ez ügyben is szívesen fogadok tanácsokat.
Új step/dir kábeleket is csináltam, azt hiszem ez már harmadikat garnitúra. Ez már árnyékolt UTP kábelből, az árnyék szintén a földre lekötve.
Az árnyékolások nem rontottak semmit a rendszeren, de nem is javítottak.
Még egyszer elnézést LZ, hogy csak most válaszolok, akkor ebben a topic-ban folytatnám tovább.
Adott három gép:
2 db Kompas F-1100 (ebből az egyik komplett átépítés alatt, a másik még az eredeti állapotában működik)
Motor vezérlő: Microstep driver CW8060 (80V 6A)
Motor: Motion king 34HS4802 (5,8 Nm, 5A)
1 db Kompas F-800 (ezzel van a probléma)
Motor vezérlő: MSD-50-5.6
Motor: Klaviós 34SM080-050-8W-xx.xx-4.0 (4 Nm, 5A)
Az F-800 váza hegesztett zártszelvény nem túl merev, de az F-1100 alulapokból épített vázához képest mindenképpen merevebb és a munkaterülete is kisebb.
Viszont az átépítés alatt álló gép jelenleg kb. 120 kg körüli hídját idecipeltük és arra rászerelve is jelentkezett a probléma.
Az 1. problémára bemásolom a másik topic-ból azt amire tegnap jutottam:
„az üresen vázra csavarozott motor több mint valószínű, tényleg a rezonancia miatt esik ki aszinkronból. Hétvégén még azt írtam nem függ a mikrolépés beállítástól. Ez így nem teljesen igaz, nem függ olyan értelemben, hogy csinálja így is úgy is, viszont ami csak tegnap tűnt fel, hogy ez az instabil tartomány "elmászik". Elhangolható a mikrolépésekkel, tehát más fordulatszám tartományban fog jelentkezni. Sőt, mintha még felharmónikusok is lennének, több ilyen fordulatszám tartomány van ahol elakad és köztük stabilabb részek, ahol jóval nehezebben vagy egyáltalán nem akad meg. Viszont ha a szíj felkerül, a probléma megszűnik, a motor nem akad el sehol.”
2. backlash probléma továbbra is nagy gond.
Az F-800 eredeti tápja egy 500 W-os torroid, 3x10.000 mikro farad puffer és 37 V a pufferek után. Jelenleg 40V-os tápnál nincs nagyobb, egy próbát csináltam úgy, hogy a két kapcsolóüzeműt 40V+36V sorba kötve 76V-al hajtottam meg a CW8060 driverrel az X, Y-t.
Így is elakadt, de a hangja sem volt túl szép.
Visszakötve a régi torroidot is, jelenleg minden tengelynek saját tápja van.
Mach3 alatt:
Backlash nélkül a gép X, Y 2500 mm/min gyorsjárattal, és 900 mm/s2 gyorsulással úgy néz ki, hogy stabilan megy. Jelen áttételek (16x5 orsó, 1:2 lassító áttétel) mellet a léptetőnek ez 1000 1/min fordulatot jelent.
Ha bekapcsolom a backlash-t, 600 mm/min, és 100 mm/s2-re kell vissza vennem, hogy ne akadjon meg. Ez már annyira lassú, hogy borzasztó.
A motorkábelek árnyékoltak, de az árnyékolás eredetileg nem volt lekötve sehová. Én most úgy csináltam megy, ahogy az a hifi kábelezésnél is bevett szokás, hogy az árnyékot csak az egyik oldalon (földhurok elkerülése végett) a vezérlő szekrény oldalán lekötöttem a földre, ahová a tápok és a váz földelése is megy és onnan megy a betáp kábel földjére. Remélem ez így helyénvaló, ez ügyben is szívesen fogadok tanácsokat.
Új step/dir kábeleket is csináltam, azt hiszem ez már harmadikat garnitúra. Ez már árnyékolt UTP kábelből, az árnyék szintén a földre lekötve.
Az árnyékolások nem rontottak semmit a rendszeren, de nem is javítottak.
Cím: Re:Léptetőmotor
Írta: krnj79r9n Dátum 2012 augusztus 07, 11:42
Írta: krnj79r9n Dátum 2012 augusztus 07, 11:42
Még annyit az egészhez, hogy ha X-tengely step/dir kábelét lehúzom (erre van beállítva a backlash, 0,2 mm), úgy is megakasztja az Y-t, sőtt ha X-et és Z-t is teljesen lekötöm, lehúzok a motorvezérlőkről mindent, tehát csak Y kap tápot és vezérlést az Y tengely akkor is megáll, ha X-et ráindítom.
Ilyen formában nem sok köze van szerintem a tápellátáshoz.
USB CNC controllerrel a saját szoftverével ugyan ezt tapasztaltam, viszont ezzel nagyobb sebességeket tudok elérni bekapcsolt backlash mellett is, a sebességre sokkal kevésbé érzékeny, csak a gyorsulást kell 200 mm/s2 környékére visszavenni.
Ilyen formában nem sok köze van szerintem a tápellátáshoz.
USB CNC controllerrel a saját szoftverével ugyan ezt tapasztaltam, viszont ezzel nagyobb sebességeket tudok elérni bekapcsolt backlash mellett is, a sebességre sokkal kevésbé érzékeny, csak a gyorsulást kell 200 mm/s2 környékére visszavenni.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2012 augusztus 07, 13:28
Írta: jv7pu3a5p Dátum 2012 augusztus 07, 13:28
Ezen új infók fényében, hogy lekötött kábelekkel is jelentkezik a probléma, valóban csak a vezérlés marad. Jó lenne szkóppal látni a jeleket, hogy mi is történik olyankor mikor ráindítasz egy másik tengelyt és megáll a motor.
Egyébiránt az áttétel sem hiszem, hogy szükséges lenne. Egy ilyen nagy nyomatékú motornál, direktben lenne a jobb megoldás, netán inkább gyorsító áttétellel, de ez nem igazán az én asztalom, majd megmondják azok akik értenek hozzá. Persze nem tudom mennyi a mozgatott tömeged.
Mindössze a saját gépemből indulok ki, nekem 16x10 orsóm van és 3.1Nm motorom.
Egyébként a 40V azért továbbra is keveslem.
Egyébiránt az áttétel sem hiszem, hogy szükséges lenne. Egy ilyen nagy nyomatékú motornál, direktben lenne a jobb megoldás, netán inkább gyorsító áttétellel, de ez nem igazán az én asztalom, majd megmondják azok akik értenek hozzá. Persze nem tudom mennyi a mozgatott tömeged.
Mindössze a saját gépemből indulok ki, nekem 16x10 orsóm van és 3.1Nm motorom.
Egyébként a 40V azért továbbra is keveslem.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 augusztus 07, 13:51
Írta: s7manbs8 Dátum 2012 augusztus 07, 13:51
Nem mechnaikai baja van ?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 augusztus 07, 14:45
Írta: 000000000 Dátum 2012 augusztus 07, 14:45
Azt látom, hogy a motor túl van pörgetve. Ráadásul, ahhoz képest alacsony feszültséget kap.
A motor fordulatát, 700 max 800 fölé nem kellene vinni, mert instabillá válik. Nagyobb fordulaton, jobban előjönnek a motor hibái is, ha van.
Próbáld ki 700 -ason, és 1200 mikro lépéssel. Fél, tartóárammal.
Ajánlom, nézd meg a motor jelleg görbéjét. Ami, ideális körülményekre vonatkozik. Ami, valószínűleg nálad nincs.
Ha, nagyobb sebességre van szükség, a dinamika rovására, akkor változtatni kell az áttételen, vagy orsócsere.
Másrészt, azt gondolom, az a PC, amivel megy, nem képes kiszolgálni megfelelő minőségű, és, sebességű jellel a vezérlőt. (A leírásod alapján, ez elég egyértelmű)
Az is előfordul, hogy ez a port hibájából van. (De, nálam, videokártya is okozott már hasonló hibát.)
Másrészt, a motorok között is van eltérés, típuson belül is abban, hogy milyen gyorsan képes, a mágneses erőteret felépíteni, és megszüntetni.
De, gondolni kell arra is, hogy gyártási hibás, vagy ütést kaphatott.
Érdekes lenne, tudni, a jelszélességek, hogy vannak állítva?
De, én, ráraknám, egy jobb PC. re legalább próbaképpen.
A PC. GND –jét is közösítsd a többi GND vel. A gépvázzal is.
Biztosan legalább két oka van a jelenségnek, ezért nehezebb kideríteni, megszüntetni. Ezek, a hibák, egymást erősítik.
Cím: Re:Léptetőmotor
Írta: hostya Dátum 2012 augusztus 07, 23:46
Írta: hostya Dátum 2012 augusztus 07, 23:46
Áthozva az Épül a gépem ::: Szám Attila topikból...
====================
Értem.
Tehát valójában ezek az AlNiCo mágnesek nem mágneseződnek le teljesen, csak éppen a zárt mágneskörben (közel duplára) fel mágneseződöt tulajdonságukat veszítik el.
Köszönöm.
Még lenne kérdésem ezzel kapcsolatban, de menjünk át vele a Léptetőmotoros topikba.
(közben megnéztem a linket is... köszi.)
Válasz 'svejk' üzenetére (#512)
================
Tehát a kérdés:
Létezik olyan hobby szinten megvalósítható eljárás amivel az ilyen -szétszerelt- forgórészek újra fel mágnesezhetők az eredeti (vagy aközeli) állapotra.
Valami feltöltött kondival adott "lórúgásra" gondolok...
====================
Értem.
Tehát valójában ezek az AlNiCo mágnesek nem mágneseződnek le teljesen, csak éppen a zárt mágneskörben (közel duplára) fel mágneseződöt tulajdonságukat veszítik el.
Köszönöm.
Még lenne kérdésem ezzel kapcsolatban, de menjünk át vele a Léptetőmotoros topikba.
(közben megnéztem a linket is... köszi.)
Válasz 'svejk' üzenetére (#512)
================
Tehát a kérdés:
Létezik olyan hobby szinten megvalósítható eljárás amivel az ilyen -szétszerelt- forgórészek újra fel mágnesezhetők az eredeti (vagy aközeli) állapotra.
Valami feltöltött kondival adott "lórúgásra" gondolok...
Cím: Re:Léptetőmotor
Írta: s2k5ycubj Dátum 2012 augusztus 07, 23:57
Írta: s2k5ycubj Dátum 2012 augusztus 07, 23:57
Régen a motorkerékpárok lendkerekét felújították, akkor még úgy mondták,hogy "delejezték". Ott működött a dolog,egyből bika lett a gyújtás és a töltés is.
Cím: Re:Léptetőmotor
Írta: hostya Dátum 2012 augusztus 08, 00:03
Írta: hostya Dátum 2012 augusztus 08, 00:03
Tudom hogy működik a dolog Laci.
Engem a házilagos megvalósítás lehetősége érdekel.
Engem a házilagos megvalósítás lehetősége érdekel.
Cím: Re:Léptetőmotor
Írta: s2k5ycubj Dátum 2012 augusztus 08, 00:06
Írta: s2k5ycubj Dátum 2012 augusztus 08, 00:06
Reméljük tudja valaki. Sajnos nagyon sok szakma kihalt és a mesterek magukkal vitték a szaktudást és a szakmájuk minden titkát.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2012 augusztus 08, 06:23
Írta: Szalai György Dátum 2012 augusztus 08, 06:23
Elvileg akár létezhetne erre való Hobbyista módszer, de a gyakorlatban túl nagy munka befektetést igényelne a készülék megépítése, ami nagyon meghaladná az olcsón beszerezhető másik motorhoz szükséges munkát.
A léptetőmotor forgórésze (emlékeim szerint) többnyire két mágnes gyűrűből áll, amik külön-külön négypólusú mágnesek. A két gyűrű pólusai egymáshoz képest egy lépésnyi szöggel eltolva. Ezt a nyolc mágneses pólust egyszerre kéne megrúgni a kellő térerővel. Szép nagy készülék volna, nagy vasakkal, nagy tekercsekkel, és nagy kondenzátor telepekkel. A többi már gyerekjáték.
A léptetőmotor forgórésze (emlékeim szerint) többnyire két mágnes gyűrűből áll, amik külön-külön négypólusú mágnesek. A két gyűrű pólusai egymáshoz képest egy lépésnyi szöggel eltolva. Ezt a nyolc mágneses pólust egyszerre kéne megrúgni a kellő térerővel. Szép nagy készülék volna, nagy vasakkal, nagy tekercsekkel, és nagy kondenzátor telepekkel. A többi már gyerekjáték.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2012 augusztus 08, 17:57
Írta: Szalai György Dátum 2012 augusztus 08, 17:57
Még várok egy kicsit, hátha kijavít valaki.
Cím: Re:Léptetőmotor
Írta: ra8nsmk6w Dátum 2012 augusztus 08, 18:10
Írta: ra8nsmk6w Dátum 2012 augusztus 08, 18:10
Az eurómagnetnél megoldják ezt a problémát nem hobby szinten. felmágnesezés \db kb 500ft. ezért nem állnék neki gépet fejleszteni a témában
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 augusztus 08, 18:51
Írta: svejk Dátum 2012 augusztus 08, 18:51
Kimondottan láptetőmotorhoz nem lenne érdemes gyártani készüléket. Mármint a mechanikát, mivel
ahány motor annyi átmérő.
ahány motor annyi átmérő.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 augusztus 08, 18:54
Írta: svejk Dátum 2012 augusztus 08, 18:54
Mágnesező készülékük valóban van, de azt hobby körülmények közt is gyorsan össze lehet dobni.
Szerintem léptető forgórészt Ők sem tudnak mágnesezni, csak olyan készülékeket amikben már eleve benne a felmágnesező tekercs, pl. tárcsamotorok.
Szerintem léptető forgórészt Ők sem tudnak mágnesezni, csak olyan készülékeket amikben már eleve benne a felmágnesező tekercs, pl. tárcsamotorok.
Cím: Re:Léptetőmotor
Írta: ra8nsmk6w Dátum 2012 augusztus 08, 19:42
Írta: ra8nsmk6w Dátum 2012 augusztus 08, 19:42
Félreérthető voltam. Egyedi mágnesekről lenne szó. A torqe csónakmotor "alnico" mágnesei kapcsán volt róla szó. Ugyanis az el lett melegitve a megrepedt külső héj hegesztése közben. ( az ötlet nem tölem származik, mármint a hegesztésé)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 augusztus 08, 19:51
Írta: svejk Dátum 2012 augusztus 08, 19:51
ok.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2012 augusztus 08, 20:00
Írta: Szalai György Dátum 2012 augusztus 08, 20:00
Szóval semmi „két mágnes gyűrű” meg semmi „külön-külön négypólusú”.
A hibrid léptető motor forgórészén egyetlen axiálisan mágnesezett gyűrű alakú mágnes található, a forgórész közepén. Azt fogja közre a két fogazott lágyvas gyűrű, Ettől az egyik fogazott gyűrű összes foga körben északi pólusú, a másiké meg körben déli.
Ez szerint egyetlen egy mágnest kellene újra delejezni, ami nem tűnik annyira bonyolult feladatnak.
A hibrid léptető motor forgórészén egyetlen axiálisan mágnesezett gyűrű alakú mágnes található, a forgórész közepén. Azt fogja közre a két fogazott lágyvas gyűrű, Ettől az egyik fogazott gyűrű összes foga körben északi pólusú, a másiké meg körben déli.
Ez szerint egyetlen egy mágnest kellene újra delejezni, ami nem tűnik annyira bonyolult feladatnak.
Cím: Re:Léptetőmotor
Írta: krnj79r9n Dátum 2012 augusztus 09, 20:33
Írta: krnj79r9n Dátum 2012 augusztus 09, 20:33
Szervusz Danibá,
Azért annyira nincs túlpörgetve a motor, de lehet hogy egy kicsit visszább kell majd vennem az áttételt, belátom, lehet hogy direktbe. Valószínűleg egyszer úgy is át lesz építve az egész.
A tápfeszem 40 V, max. 6-7 V-al lehetne magasabb, nem tehetek rá pont 50 V-os tápot. Az összes léptetőmotor vezérlő leírásában benne van, hogy nem tanácsos pont annyira választani a tápot a bemeneti ingadozások és a EMF feszültségek miatt. Max. 45 V-ot javasol az MSD használati útmutató. Egyébként már nem is várok el tőle nagyobb sebességet, a 2000 mm/perc gyorsjárat megfelelne, ez 800 1/min fordulat a motoron a jelenlegi áttételekkel. Csak azt nem értem, hogy a gép ettől sokkal többet is tud stabilan, mindaddig még be nem kapcsolom, az egyébként brutális 0.2 mm-es backlash-t az X tengelyre. Ha bekapcsolom mach3 alatt 800 mm/percet SEM tud (320 1/min a motoron) és gyorsulás 100 mm/s2 fölé nem tudom vinni.
CNC USB controller-rel jobb a helyzet a sebességre nem érzékeny 1600 mm/perc körül jó, de a gyorsulást itt sem érdemes 150 mm/s2 fölé venni.
Senki sem találkozott még ezzel a jelenséggel?
Megértem, hogy a nagy lassítás miatt ne várjak túl nagy sebességet. De dinamika sincs! Se sebesség se gyorsulás.
A motor nyomatékgörbéjét nem tudom megnézni, mert a Klavió-s típus azonosító alapján nem találok semmit, fogalmam sincs milyen gyártmány, valószínűleg kínai.
Megpróbáltam a földelést, a PC házát is lekötöttem a többi földeléshez, hová a gépvázat is. Sajnos ez sem jött be.
A jelenlegi PC egyébként a 4. a sorban. Tehát azzal sincs gond. Az első az eredeti amivel még vették, az valóban nem túl gyors régi gép volt, ezért is akartuk cserélni, mondván biztosan azzal van a baj. A második az egy jóval gyorsabb mai PC (celeron), de cseréltük, mert az meg állandóan fagyott. A harmadik PC, amiről most is megy, az egy Intel Atom 2 magos integrált alaplap 1800 Mhz, 3,3 GB ram, a párhuzamost portja viszi a 100 Khz-et. Viszont most CNC USB controllerrel megy USB-ről és a probléma itt is megvan bekapcsolt backlash-el.
Továbbá két elég erős laptopról is ment USB-ről.
Kezdem azt hinni, hogy a rendszer tényleg ennyire képes, ha a backlash aktív.
Na mindegy, most összeraktam, megy ahogy megy, nem túl gyors, de legalább használható. Most nem érek rá vele több időt eltölteni, ez is nagyon sok volt, de legalább nem teljesen hiába, mert sokat tanultam belőle. Most be kell fejeznem a Kompas F-1100 átépítését.
Jövőhéten úgy néz ki, jön hozzánk Tibor45, ugyan más ügyből kifolyólag, de megnézi a gépet is és nagyon kíváncsi vagyok a személyes véleményére, mit szúrtam el, mi nem stimmel. Ígérem bevallom, így okulhat belőle más is.
Azért annyira nincs túlpörgetve a motor, de lehet hogy egy kicsit visszább kell majd vennem az áttételt, belátom, lehet hogy direktbe. Valószínűleg egyszer úgy is át lesz építve az egész.
A tápfeszem 40 V, max. 6-7 V-al lehetne magasabb, nem tehetek rá pont 50 V-os tápot. Az összes léptetőmotor vezérlő leírásában benne van, hogy nem tanácsos pont annyira választani a tápot a bemeneti ingadozások és a EMF feszültségek miatt. Max. 45 V-ot javasol az MSD használati útmutató. Egyébként már nem is várok el tőle nagyobb sebességet, a 2000 mm/perc gyorsjárat megfelelne, ez 800 1/min fordulat a motoron a jelenlegi áttételekkel. Csak azt nem értem, hogy a gép ettől sokkal többet is tud stabilan, mindaddig még be nem kapcsolom, az egyébként brutális 0.2 mm-es backlash-t az X tengelyre. Ha bekapcsolom mach3 alatt 800 mm/percet SEM tud (320 1/min a motoron) és gyorsulás 100 mm/s2 fölé nem tudom vinni.
CNC USB controller-rel jobb a helyzet a sebességre nem érzékeny 1600 mm/perc körül jó, de a gyorsulást itt sem érdemes 150 mm/s2 fölé venni.
Senki sem találkozott még ezzel a jelenséggel?
Megértem, hogy a nagy lassítás miatt ne várjak túl nagy sebességet. De dinamika sincs! Se sebesség se gyorsulás.
A motor nyomatékgörbéjét nem tudom megnézni, mert a Klavió-s típus azonosító alapján nem találok semmit, fogalmam sincs milyen gyártmány, valószínűleg kínai.
Megpróbáltam a földelést, a PC házát is lekötöttem a többi földeléshez, hová a gépvázat is. Sajnos ez sem jött be.
A jelenlegi PC egyébként a 4. a sorban. Tehát azzal sincs gond. Az első az eredeti amivel még vették, az valóban nem túl gyors régi gép volt, ezért is akartuk cserélni, mondván biztosan azzal van a baj. A második az egy jóval gyorsabb mai PC (celeron), de cseréltük, mert az meg állandóan fagyott. A harmadik PC, amiről most is megy, az egy Intel Atom 2 magos integrált alaplap 1800 Mhz, 3,3 GB ram, a párhuzamost portja viszi a 100 Khz-et. Viszont most CNC USB controllerrel megy USB-ről és a probléma itt is megvan bekapcsolt backlash-el.
Továbbá két elég erős laptopról is ment USB-ről.
Kezdem azt hinni, hogy a rendszer tényleg ennyire képes, ha a backlash aktív.
Na mindegy, most összeraktam, megy ahogy megy, nem túl gyors, de legalább használható. Most nem érek rá vele több időt eltölteni, ez is nagyon sok volt, de legalább nem teljesen hiába, mert sokat tanultam belőle. Most be kell fejeznem a Kompas F-1100 átépítését.
Jövőhéten úgy néz ki, jön hozzánk Tibor45, ugyan más ügyből kifolyólag, de megnézi a gépet is és nagyon kíváncsi vagyok a személyes véleményére, mit szúrtam el, mi nem stimmel. Ígérem bevallom, így okulhat belőle más is.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 augusztus 20, 16:46
Írta: 000000000 Dátum 2012 augusztus 20, 16:46
Sziasztok!
Kezdő vagyok léptetőmotorok terén.Azt szeretném kérdezni tanultabb fórumozótársaimtól, hogy agy 2d habvágónál az azonos tengelyen dolgozó motorokat lehet-e a vezérlő kimenetén párhuzamosan kötni?Egy abszolút ismeretszerző projectet indítok, 2d habvágás 4db 12V-os Robotron SPA 52/60-5100 típusú motorral.Találtam a neten 1 motor vezérlésére való vezérlőt, erre szeretnék 2-t rákötni.Működik ez így?
Köszönöm a válaszokat!
Kezdő vagyok léptetőmotorok terén.Azt szeretném kérdezni tanultabb fórumozótársaimtól, hogy agy 2d habvágónál az azonos tengelyen dolgozó motorokat lehet-e a vezérlő kimenetén párhuzamosan kötni?Egy abszolút ismeretszerző projectet indítok, 2d habvágás 4db 12V-os Robotron SPA 52/60-5100 típusú motorral.Találtam a neten 1 motor vezérlésére való vezérlőt, erre szeretnék 2-t rákötni.Működik ez így?
Köszönöm a válaszokat!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 augusztus 20, 17:00
Írta: 000000000 Dátum 2012 augusztus 20, 17:00
Szia! Fog az működni, csak a motorvezérlődön az egy motorhoz szükséges áramnak a kétszeresét állítsad be a párhuzamos kötés miatt.
Cím: Re:Léptetőmotor
Írta: 2mhkh08yk Dátum 2012 augusztus 30, 10:56
Írta: 2mhkh08yk Dátum 2012 augusztus 30, 10:56
Azért érdemes volna kimérni, itt a motork is pár ohmosak, még a vezetékhosszak is beleszólhatnak az áramok arányaiba, koránt sem ennyire egyértelmű, hogy fele-felébe fog megoszlani az áram. Elég egy kicsit nagyobb átmeneti ellenállású kötés, le is ég a kisebb ellenállású ágon levő motor, és miután az leégett, a másik is megy utána.
Cím: Re:Léptetőmotor
Írta: 2mhkh08yk Dátum 2012 augusztus 30, 10:57
Írta: 2mhkh08yk Dátum 2012 augusztus 30, 10:57
Ha egy Vexta léptetőmotor a névleges árammal hajtva melegszik, viszont kéne a nyomaték, meg lehet azt tenni, hogy a hátuljáról az adatlap matricát letakarítom, ráragasztok egy bordát, és megküldöm egy 5cm-es régi prociventilátorral? Csinált már valaki ilyet?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 augusztus 30, 11:42
Írta: 000000000 Dátum 2012 augusztus 30, 11:42
Bocsi, de megette a fene, ha a vezetékednek nem sokkal kisebb az ellenállása, ráadásul az alapvetően csak Ohmos, a motor tekercs pedig erősen induktív. Ha pedig sorosan kötöd a motorokat, nem lehet gond.
Ventillátort lehet tenni egy motorra, de nem egészséges. Inkább méretezzed a hajtásodat optimumra (áttétel!!!!!), és akkor nem kell hűteni, valamint ököl szabály: egy léptető motortól 10 1/s fordulat felett már nem vár csodát, örülj annak, hogy viszi a saját lendülete ilyenkor már.:)
Ventillátort lehet tenni egy motorra, de nem egészséges. Inkább méretezzed a hajtásodat optimumra (áttétel!!!!!), és akkor nem kell hűteni, valamint ököl szabály: egy léptető motortól 10 1/s fordulat felett már nem vár csodát, örülj annak, hogy viszi a saját lendülete ilyenkor már.:)
Cím: Re:Léptetőmotor
Írta: 2mhkh08yk Dátum 2012 augusztus 30, 14:53
Írta: 2mhkh08yk Dátum 2012 augusztus 30, 14:53
Nem mértem utána, de kételyeim vannak a párhuzamosítást illetően. Ki kell próbálni és megmérni mindkét ág áramát, lehetőleg olyan árammérővel, amihez nem kell megszakítani az áramkört és az X ellenállású árammérőt még plusz betenni a körbe, vagy ha igen, akkor egyszerre kettőt kell mindkét ágba tenni.
Egyébként egy léptetőmotort hogy kötsz _sorosan_ egy másikkal?
Egyébként egy léptetőmotort hogy kötsz _sorosan_ egy másikkal?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 augusztus 30, 15:20
Írta: 000000000 Dátum 2012 augusztus 30, 15:20
Úgy kötöd sorosan, ahogyan párhuzamosan. A megfelelő drótot a megfelelővel.:)
Mellesleg mesélj már a hajtásodról, mielőtt össze-vissza kínlódsz a hűtéssel, ilyen-olyan motor kötözgetésekkel. Tehát ezeket kellene tudni:
- mekkora a motorod nyomatéka,
- mekkora össztömeget mozdítasz vele
- egy motor fordulatra mekkora a lineáris elmozdulásod?
- mivel mozgatsz? Orsó-anya, fogaskerék-fogasléc, stb...
Ezekből már lehet követekeztetni, alá, fölé, vagy optimum pont környékére sikeredett a hajtásod.
Mellesleg mesélj már a hajtásodról, mielőtt össze-vissza kínlódsz a hűtéssel, ilyen-olyan motor kötözgetésekkel. Tehát ezeket kellene tudni:
- mekkora a motorod nyomatéka,
- mekkora össztömeget mozdítasz vele
- egy motor fordulatra mekkora a lineáris elmozdulásod?
- mivel mozgatsz? Orsó-anya, fogaskerék-fogasléc, stb...
Ezekből már lehet követekeztetni, alá, fölé, vagy optimum pont környékére sikeredett a hajtásod.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 augusztus 30, 15:20
Írta: 000000000 Dátum 2012 augusztus 30, 15:20
Az előbbi Neked ment.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 augusztus 30, 15:28
Írta: 000000000 Dátum 2012 augusztus 30, 15:28
Sokkal jobban jársz, ha minden motornak teszel saját vezérlőt és a step-dir jelet osztod ki párhuzamosan. Vagyis összekötöd. Így nincs az a veszély, hogy egyik motor kinyírja a másikat. Nemutolsósorban, ha az áramhatárolás is normálisan fog működni.
Cím: Re:Léptetőmotor
Írta: 2mhkh08yk Dátum 2012 augusztus 31, 09:57
Írta: 2mhkh08yk Dátum 2012 augusztus 31, 09:57
Na várj, én nem akarom a motoromat sehogy sem kötözni, az a másik kolléga. Én csak hűteni szeretném. Egyébként nem egy profi gépem van, hanem teljesen amatőr, mindegyik hajtás 1mm-es menetemelkedésű trapézorsóval és teflon tömbbe belefúrt ugyanilyen menettel van megoldva, t2,5-es szíjjal van 2:1 arányban átvive a tengelyre a motor nyomatéka.
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2012 szeptember 05, 22:35
Írta: c2nsu773m Dátum 2012 szeptember 05, 22:35
Lenne egy kérdésem !
Egy 6 vezetékes lépetőmotornak hogyan kell
a vezetékpárjait kimérni?
Egy 6 vezetékes lépetőmotornak hogyan kell
a vezetékpárjait kimérni?
Cím: Re:Léptetőmotor
Írta: w8zwiiw56 Dátum 2012 szeptember 05, 23:35
Írta: w8zwiiw56 Dátum 2012 szeptember 05, 23:35
Mérj ellenállást. Ha két kivezetés között mérsz X értékű ellenállást, mérj az egyik kábelhez képest tovább, találni fogsz még egy kivezetést. Ha annak az értéke 2*X akkor megvan a tekercs két vége és a másik kábel a közös kivezetés. Ha X/2 akkor éppen az egyik tekercsvég valamint a közös kivezetés között mérsz.
Így lefekvés előtt ez jött ki belőlem, remélem érthető lett! [#circling]
Így lefekvés előtt ez jött ki belőlem, remélem érthető lett! [#circling]
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2012 szeptember 06, 05:18
Írta: c2nsu773m Dátum 2012 szeptember 06, 05:18
Vagy 2X elolvastam , de értem!
Köszi!
Köszi!
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2012 szeptember 06, 20:34
Írta: c2nsu773m Dátum 2012 szeptember 06, 20:34
Szeretném megkérdezni ,hogy az M-type vezérlőnek a bekötési és beállítási PDF-je nincs meg véletlenűl valakinek?
Cím: Re:Léptetőmotor
Írta: zoli0302 Dátum 2012 szeptember 06, 22:03
Írta: zoli0302 Dátum 2012 szeptember 06, 22:03
A kék kínaira gondolsz ?
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2012 szeptember 07, 05:37
Írta: c2nsu773m Dátum 2012 szeptember 07, 05:37
Igen!
Cím: Re:Léptetőmotor
Írta: xfg6v697j Dátum 2012 szeptember 07, 06:43
Írta: xfg6v697j Dátum 2012 szeptember 07, 06:43
Cím: Re:Léptetőmotor
Írta: zoli0302 Dátum 2012 szeptember 07, 09:51
Írta: zoli0302 Dátum 2012 szeptember 07, 09:51
Látom megelőztek... Ha mégsem megy a gyári beállításokkal ne csüggedj én már találkoztam olyan szemre azonos vezérlővel aminek a ki és bemeneti portjai nem stimmeltek :)
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2012 szeptember 07, 11:44
Írta: c2nsu773m Dátum 2012 szeptember 07, 11:44
[#worship][#worship][#worship][#worship][#worship][#worship]
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2012 szeptember 07, 12:27
Írta: c2nsu773m Dátum 2012 szeptember 07, 12:27
Ti használjátok ezt a típusú vezérlőt?
A PID beállításoknál az 1-2 az áram erősség?
Mi a 2-3?
A PID beállításoknál az 1-2 az áram erősség?
Mi a 2-3?
Cím: Re:Léptetőmotor
Írta: tiggersoft Dátum 2012 szeptember 07, 15:53
Írta: tiggersoft Dátum 2012 szeptember 07, 15:53
Szia
Lecsengés.
A motor indukált mezejének "összeomlási sebessége" vagy valami hasonló...
Lecsengés.
A motor indukált mezejének "összeomlási sebessége" vagy valami hasonló...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 szeptember 13, 16:42
Írta: 000000000 Dátum 2012 szeptember 13, 16:42
Bocs hogy zavarlak benneteket a kérdéseimmel,de olyan helyzetbe vagyok hogy nem tudok személyesen kihez fordulni.Mert a léptető motorokhoz nem ért senki itt a környéken a hol lakom.Ezért gondoltam ide be írok hát ha valaki tud segíteni.Előre leszögezem az elektronikához nem értek. Szükségem volna egy automata rendszer meg építésére 2db léptető motor és egy DC motorral.Az elképzelés az volna. Van az 1 motor(léptető motor) alap állasból indul és tesz egy fél fordulatot és ott meg áll 2mp-re de míg áll addig a 3 motor(dc motor)el indul teljes fordulaton(kb 1000-1700 1/min) 2mp-ig és meg áll.Aztán az 1 motor megint tesz egy fél fordulatot és meg érkezik alap állásba és itt áll 1-1.5mp és e közben a 2motor(léptető motor) tesz egy fél fordulatot és csak akkor fordul egy felet mikor az 1 motor megint alap állásba érkezik.Ezt kellene meg oldani összehangolni a motorok mozgását és időzíteni azokat.Ehhez kérek segítséget.Én bipoláris léptető motorra gondoltam (Léptetőmotor 42HS02-F5-0.22) de nem tudom milyen vezérlővel és még mi kellene még hozzá.A dc motor ki-be kapcsolását mechanikusan gondoltam egy kapcsolóval.
Amikor meg leállítom a gépet akkor az 1 motor mindig alap állásba álljon meg.
Amikor meg leállítom a gépet akkor az 1 motor mindig alap állásba álljon meg.
Cím: Re:Léptetőmotor
Írta: krnj79r9n Dátum 2012 szeptember 17, 08:15
Írta: krnj79r9n Dátum 2012 szeptember 17, 08:15
Szervusztok,
Elnézést, hogy csak most jelenkezem, kicsit el voltam havazva. Most betegen itthon jobban van időm fórumozgatni. Volt itt Tibor45, kipróbáltuk a lézeres digitalizálóját, nagyon jó kis cucc, ezért az árért amit érte kér nagyon megéri. Ez úton is nagyon köszönöm a segítségét, hogy megnézte a problémás gépet is.
Az az igazság, hogy sokkal okosabbak nem lettünk a géppel kapcsolatban (itt most nem írnám le a teljes problémát, akit érdekel visszaolvas), de egy biztos, az 1:2 lassító áttétel valóban túlzó Tibor szerint is, Ő is inkább a 1:1-ben javasolná az áttételt.
De ez önmagában még nem indok erre a rossz teljesítményre, mert az áttételtől függetlenül Tibor azt derítette ki a saját szoftverével és hardverével, hogy a motorok valami okból kifolyólag borzalmasan rosszul teljesítenek. Gyakorlatilag jelenleg ennyit tud ez a gép. Javaslatára lehet, hogy majd cserélünk a motorokat, majd még kitaláljuk.
Mégegyszer köszönet Tibornak a segítségért.
Elnézést, hogy csak most jelenkezem, kicsit el voltam havazva. Most betegen itthon jobban van időm fórumozgatni. Volt itt Tibor45, kipróbáltuk a lézeres digitalizálóját, nagyon jó kis cucc, ezért az árért amit érte kér nagyon megéri. Ez úton is nagyon köszönöm a segítségét, hogy megnézte a problémás gépet is.
Az az igazság, hogy sokkal okosabbak nem lettünk a géppel kapcsolatban (itt most nem írnám le a teljes problémát, akit érdekel visszaolvas), de egy biztos, az 1:2 lassító áttétel valóban túlzó Tibor szerint is, Ő is inkább a 1:1-ben javasolná az áttételt.
De ez önmagában még nem indok erre a rossz teljesítményre, mert az áttételtől függetlenül Tibor azt derítette ki a saját szoftverével és hardverével, hogy a motorok valami okból kifolyólag borzalmasan rosszul teljesítenek. Gyakorlatilag jelenleg ennyit tud ez a gép. Javaslatára lehet, hogy majd cserélünk a motorokat, majd még kitaláljuk.
Mégegyszer köszönet Tibornak a segítségért.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2012 szeptember 17, 20:31
Írta: PSoft Dátum 2012 szeptember 17, 20:31
..."az 1:2 lassító áttétel valóban túlzó Tibor szerint is, Ő is inkább a 1:1-ben javasolná az áttételt."
© Tibor45 1:1-es áttételt javasolt volna???
Hmmmm.....:)
© Tibor45 1:1-es áttételt javasolt volna???
Hmmmm.....:)
Cím: Re:Léptetőmotor
Írta: krnj79r9n Dátum 2012 szeptember 18, 18:50
Írta: krnj79r9n Dátum 2012 szeptember 18, 18:50
Mivel ez egy léptetős gép, és az adott tömegek és órsó emelkedés miatt ez optimálisabb lenne mint 1:2 lassítás. Konkrétan nem számoltunk rá, csak sacra.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 szeptember 18, 20:35
Írta: ANTAL GÁBOR Dátum 2012 szeptember 18, 20:35
Mi ( öregebbek ) értjük Psoft beírását. Tudod évekkel ezelőtt egy lelkes fórumtársunk és Tibor között éles vita ment arról hogy jó e direkt hajtás vagy nem . Ekkor Tibor mindig a NEM et képviselte.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2012 szeptember 18, 20:50
Írta: PSoft Dátum 2012 szeptember 18, 20:50
Tényleg régen volt már,...de igaz volt!:)
Azonban én,pusztán csak az 1:1-es "áttétel" fogalomzavarára gondoltam.:)))
Azonban én,pusztán csak az 1:1-es "áttétel" fogalomzavarára gondoltam.:)))
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 szeptember 18, 21:16
Írta: 000000000 Dátum 2012 szeptember 18, 21:16
"Ekkor Tibor mindig a NEM et képviselte."
Sajnálom, hogy még Te sem értetted az akkoriakat. Soha nem voltam direkthajtás ellenes, hanem ellenkezőleg, megpróbáltam elmagyarázázni a J és társai problémát egy adott hajtás kapcsán. Ha a méretezéskor éppen 1:1 az optimális áttétel, akkora az a jó. Ha nem, akkor áttételezni illik. Ráadásul az is elég szomorú, hogy akkor DC szervóról beszélgettünk, mssleepy gépe pedig léptetős, így olybá tűnik, egyesek még a DC szervó és léptető motort is egy kalap alá veszik. Ilyen egyszerű ez a történet, a többi csak a szokásos csordaszellem és kekeckedés.:) Így nincs itt semmi féle fogalomzavar, legfeljebb annak a fejében van, aki ezt az egészet vigyorogva felvetette.:)
Sajnálom, hogy még Te sem értetted az akkoriakat. Soha nem voltam direkthajtás ellenes, hanem ellenkezőleg, megpróbáltam elmagyarázázni a J és társai problémát egy adott hajtás kapcsán. Ha a méretezéskor éppen 1:1 az optimális áttétel, akkora az a jó. Ha nem, akkor áttételezni illik. Ráadásul az is elég szomorú, hogy akkor DC szervóról beszélgettünk, mssleepy gépe pedig léptetős, így olybá tűnik, egyesek még a DC szervó és léptető motort is egy kalap alá veszik. Ilyen egyszerű ez a történet, a többi csak a szokásos csordaszellem és kekeckedés.:) Így nincs itt semmi féle fogalomzavar, legfeljebb annak a fejében van, aki ezt az egészet vigyorogva felvetette.:)
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 szeptember 19, 05:41
Írta: ANTAL GÁBOR Dátum 2012 szeptember 19, 05:41
Én megértettem.. Igyekeztem is udvariasan fogalmazni , viszont új kolléga nem érthette a bejegyzést . Ezért késztetést éreztem a megmagyarázására, valóban volt benne egy kis csúsztatás is azzal hogy a léptecset egy kalap alá vettem a Dc szervóval
Cím: Re:Léptetőmotor
Írta: krnj79r9n Dátum 2012 szeptember 19, 10:21
Írta: krnj79r9n Dátum 2012 szeptember 19, 10:21
Lehet, hogy nem vagyok olyan régi felhasználó, mint itt sokan, de azért, ha megnézed nem is tegnap regisztráltam (2011.04.05). :-)
Amúgy meg a regisztrációm előtt már jóval réggebb óta olvasom a fórumot, nagyjábol napi szinten. Kb. most lesz 3. éve.
Én végig is olvastam Tibor45 saját hajtásméretezési topikját, ami pont a "lelkes fórumtársunk"-nak (gondolom Varsára utalsz ezzel) köszönhetően elég szenvedős volt. Sokszor úgy voltam, hogy hagyjuk a francba az egésszet, pedig nagyon érdekelne, mert itt csak a veszekedés megy. De végül is elolvastam és megérte, sok értékes gondolattal lettem több, de még nagyon az elején járok, van mit tanulnom. Szerencsére, egy véletlen folytán, most már ez a munkám is, úgy hogy jól jártam a hobbym a munkám.
Tehát nagyjából én is erre gondoltam Psoft üzenetét olvasva, bár Ő az 1:1 fogalomzavarára akart rávilágítani.
#PSoft
Azért írtam 1:1-es áttételt, mert a direkt (közvetlen) hajtás alatt én azt értem, amikor a motorral a tengelyt "közvetlenül" max. egy kuplungon keresztül hajtom meg. Jelenleg bordásszíjjas hajtású a gép (1:2), erre van kialakítva és így az is marad. Tényleg van egy kis fogalomzavar, mert az 1:1 nem áttétel, de mégsem közvetlenül hajtom a tengelyt.
Amúgy meg a regisztrációm előtt már jóval réggebb óta olvasom a fórumot, nagyjábol napi szinten. Kb. most lesz 3. éve.
Én végig is olvastam Tibor45 saját hajtásméretezési topikját, ami pont a "lelkes fórumtársunk"-nak (gondolom Varsára utalsz ezzel) köszönhetően elég szenvedős volt. Sokszor úgy voltam, hogy hagyjuk a francba az egésszet, pedig nagyon érdekelne, mert itt csak a veszekedés megy. De végül is elolvastam és megérte, sok értékes gondolattal lettem több, de még nagyon az elején járok, van mit tanulnom. Szerencsére, egy véletlen folytán, most már ez a munkám is, úgy hogy jól jártam a hobbym a munkám.
Tehát nagyjából én is erre gondoltam Psoft üzenetét olvasva, bár Ő az 1:1 fogalomzavarára akart rávilágítani.
#PSoft
Azért írtam 1:1-es áttételt, mert a direkt (közvetlen) hajtás alatt én azt értem, amikor a motorral a tengelyt "közvetlenül" max. egy kuplungon keresztül hajtom meg. Jelenleg bordásszíjjas hajtású a gép (1:2), erre van kialakítva és így az is marad. Tényleg van egy kis fogalomzavar, mert az 1:1 nem áttétel, de mégsem közvetlenül hajtom a tengelyt.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 szeptember 19, 14:48
Írta: svejk Dátum 2012 szeptember 19, 14:48
Ha igazán értenéd, akkor le sem reagáltad volna Psoft beírását melynek smiley van a végén.
No de nem mindenki egyformán érti a viccet. :)
No de nem mindenki egyformán érti a viccet. :)
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2012 szeptember 19, 19:21
Írta: PSoft Dátum 2012 szeptember 19, 19:21
Ha már "megtisztelsz" a válaszoddal,légyszíves,legközelebb tedd meg azt is,hogy az épp aktuális hozzászólásomra válaszolva teszed!
Ezzel,nagymértékben elősegítenéd a fogalomzavar helyretételét a fejemben!
Ha,...van egyáltalán.
Ezzel,nagymértékben elősegítenéd a fogalomzavar helyretételét a fejemben!
Ha,...van egyáltalán.
Cím: Re:Léptetőmotor
Írta: mma6fim4 Dátum 2012 szeptember 28, 19:47
Írta: mma6fim4 Dátum 2012 szeptember 28, 19:47
Sziasztok. A három tengely közül az egyik léptetőmotor berezonál a gépemen, de lassan már szinte minden tartományban, sőt kisebb sebességen folyamatosan. Mi a bánatot lehet ezzel kezdeni? A másik két tengely nagyon szépen fut. Köszi előre is...
Cím: Re:Léptetőmotor
Írta: w987wzmm Dátum 2012 szeptember 28, 19:53
Írta: w987wzmm Dátum 2012 szeptember 28, 19:53
Másik vezérlővel próbáltad?
Cím: Re:Léptetőmotor
Írta: mma6fim4 Dátum 2012 szeptember 28, 20:28
Írta: mma6fim4 Dátum 2012 szeptember 28, 20:28
Szia. Még nem de holnap rákötöm a másik tengely vezérlőjét. A mechanikától nem lehet?
Cím: Re:Léptetőmotor
Írta: ks46twg3x Dátum 2012 szeptember 28, 20:41
Írta: ks46twg3x Dátum 2012 szeptember 28, 20:41
Ha azonos léptetőid vannak cseréld meg őket.
Mechanikától is lehet. Ha valami összerágott, nincs kenve, akkor előfordulhat, de az jellemzően adott helyen, adott pozícióban lép fel (ez lehet egyébként a konstrukcióból adódó rezonancia is).
Ha a tengely teljes hosszában jelentkezik, akkor a léptetőmotorra gyanakodhatsz. Cserélj vezérlőt, cseréld meg a motorokat, és ki fog derülni. Nem árt a kenést is ellenőrizni.
Mechanikától is lehet. Ha valami összerágott, nincs kenve, akkor előfordulhat, de az jellemzően adott helyen, adott pozícióban lép fel (ez lehet egyébként a konstrukcióból adódó rezonancia is).
Ha a tengely teljes hosszában jelentkezik, akkor a léptetőmotorra gyanakodhatsz. Cserélj vezérlőt, cseréld meg a motorokat, és ki fog derülni. Nem árt a kenést is ellenőrizni.
Cím: Re:Léptetőmotor
Írta: mma6fim4 Dátum 2012 szeptember 28, 20:46
Írta: mma6fim4 Dátum 2012 szeptember 28, 20:46
Köszi. Holnap megpróbálom mindegyik lehetőséget.
Cím: Re:Léptetőmotor
Írta: w987wzmm Dátum 2012 szeptember 28, 21:09
Írta: w987wzmm Dátum 2012 szeptember 28, 21:09
Még egy tipp. Lehet, hogy tényleg beragadt. Vettem egyszer egy csapágyhoz való spec zsírt. Tényleg fonom volt, de nem hobbi célra. A finom por és a jó kis zsír beleragadt a csapágyba. Ki kellet mosnom. Néha megakadt véletlenszerűen, mindig máshol. Azért ellenőrizd majd a csapágyat… próbáld szabadkézzel is végigforgatni. Ártani, nem fog neki.
Cím: Re:Léptetőmotor
Írta: pbalazs Dátum 2012 október 07, 21:22
Írta: pbalazs Dátum 2012 október 07, 21:22
Üdv nektek!
A véleményeteket kérem egy lépétetőmotorral kapcsolatban. Jelent-e valamit, hogy szabad tekercsvégekkel kézzel forgatva a tengelyt, annak állapotai nem mindig határozottak, vannak "puhább" és "keményebb" lépései. Ha rövidre zárom a tekercseket, akkor viszont szép határozott minden állapota.
A motort meghajtva megy rendesen, nem rángat, nem lehet könnyen lefogni, és álló helyzetben is tart rendesen.
Adatai:
Nanotec stepping motor Type 4T5718M3308
1.8 fok, 2.5V, 3A, 0.8 ohm/tekercs, 8 kivezetés
Kép róla: alja oldala
Ha esetleg valakinek volna róla adatlapja, azt is megköszönném, én nem találtam a neten.
A véleményeteket kérem egy lépétetőmotorral kapcsolatban. Jelent-e valamit, hogy szabad tekercsvégekkel kézzel forgatva a tengelyt, annak állapotai nem mindig határozottak, vannak "puhább" és "keményebb" lépései. Ha rövidre zárom a tekercseket, akkor viszont szép határozott minden állapota.
A motort meghajtva megy rendesen, nem rángat, nem lehet könnyen lefogni, és álló helyzetben is tart rendesen.
Adatai:
Nanotec stepping motor Type 4T5718M3308
1.8 fok, 2.5V, 3A, 0.8 ohm/tekercs, 8 kivezetés
Kép róla: alja oldala
Ha esetleg valakinek volna róla adatlapja, azt is megköszönném, én nem találtam a neten.
Cím: Re:Léptetőmotor
Írta: ggdr57dg Dátum 2012 október 08, 15:03
Írta: ggdr57dg Dátum 2012 október 08, 15:03
Ezt a típust "átkeresztelték" ST5718M3008-ra, lásd ebben a táblázatban.
Viszont erről a sorozatról már a Nanotec sem tárol információt, az utód ST5818-as sorozatról még valami fellelhető, de ma már az ST5918-as sorozatot gyártják.
Viszont az utódok között hasonló elektromos paraméterekkel rendelkező termék nincs.
Viszont erről a sorozatról már a Nanotec sem tárol információt, az utód ST5818-as sorozatról még valami fellelhető, de ma már az ST5918-as sorozatot gyártják.
Viszont az utódok között hasonló elektromos paraméterekkel rendelkező termék nincs.
Cím: Re:Léptetőmotor
Írta: pbalazs Dátum 2012 október 08, 17:30
Írta: pbalazs Dátum 2012 október 08, 17:30
Köszi az infót, megpróbálok valami hasonlót keresni.
Arra van ötleted, hogy kézzel forgatva miért nem annyira határozottak az állapotai üresen, mint rövidre zárt tekercsekkel? Jelentheti ez azt, hogy kezd gyengülni a mágnes? Illetve hogy ez okozhat-e gondot majd üzem közben?
Arra van ötleted, hogy kézzel forgatva miért nem annyira határozottak az állapotai üresen, mint rövidre zárt tekercsekkel? Jelentheti ez azt, hogy kezd gyengülni a mágnes? Illetve hogy ez okozhat-e gondot majd üzem közben?
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2012 október 12, 17:00
Írta: istvan58 Dátum 2012 október 12, 17:00
Sziasztok,
Segitséget szeretnék kérni a következőben:
Megkaptam Ebay-rol a Leadshine DM556 digitális léptető motor vezérlőt. Ehez a Leadshine honlaprol letöltöttem a ProTuner-All V1.0 software-t de semmiképen nem tudok kommunikálni a driverel, próbáltam WIN7, XP. win2000-el is.
Azután csak próbaképen kipróbáltam a ProTuner V2.0 DM442 re irt software-t, na ezzel már tudom vezérelni a motort, majdnem minden müködik kivéve a mentés és a driverre töltés. Na meg a max beálitható áram csak 4,2A nem 5,6.
Van e valakinek ötlette, vagy esetleg ProTuner V2.0 DM556-hoz?
Üdv,
István
Segitséget szeretnék kérni a következőben:
Megkaptam Ebay-rol a Leadshine DM556 digitális léptető motor vezérlőt. Ehez a Leadshine honlaprol letöltöttem a ProTuner-All V1.0 software-t de semmiképen nem tudok kommunikálni a driverel, próbáltam WIN7, XP. win2000-el is.
Azután csak próbaképen kipróbáltam a ProTuner V2.0 DM442 re irt software-t, na ezzel már tudom vezérelni a motort, majdnem minden müködik kivéve a mentés és a driverre töltés. Na meg a max beálitható áram csak 4,2A nem 5,6.
Van e valakinek ötlette, vagy esetleg ProTuner V2.0 DM556-hoz?
Üdv,
István
Cím: Re:Léptetőmotor
Írta: vvvsmkgjx Dátum 2012 november 05, 17:04
Írta: vvvsmkgjx Dátum 2012 november 05, 17:04
Honnan tudom, hogy mekkorára kell vennem a lépésközt egy 2,2 Nm-es 1.8 fokos léptetőmotornál. Elvileg 1 teljes fordulat esetén 200 lépés lenne, 2 pedig 400 és így tovább. Meddig mehetek el ezzel. Próbálgattam beállítáni, de egy 1-200-as beállításnál nagyon "hangos" 6-1200-as beállításnál meg gyakran téveszt. Kettő között sem az igazi, mert vannak tévesztések. Honnan tudom, hogy mi a jó beállítás. Tudna adni segítséget valaki a témában?
Cím: Re:Léptetőmotor
Írta: kuv5p7226 Dátum 2012 november 05, 17:21
Írta: kuv5p7226 Dátum 2012 november 05, 17:21
Ha téveszt akkor gyenge a motor a feladathoz vagy nem vezérled ki rendesen, azaz nincs elég áram és/vagy feszültség.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 november 05, 17:30
Írta: s7manbs8 Dátum 2012 november 05, 17:30
Milyen vezérlővel ? Miért téveszt vajon mert a gép nem tud elég gyors jelet adni, vagy nem tudsz elég nagy áramot beállítani ? Lehet annak több oka.
Cím: Re:Léptetőmotor
Írta: vvvsmkgjx Dátum 2012 november 05, 17:41
Írta: vvvsmkgjx Dátum 2012 november 05, 17:41
Optimum CNC vezérlődoboz a VI-os szériából,a hozzá tartozó szoftver pedig NCdrive.
Cím: Re:Léptetőmotor
Írta: vvvsmkgjx Dátum 2012 november 05, 17:49
Írta: vvvsmkgjx Dátum 2012 november 05, 17:49
A következőről lenne szó:
http://www.schleifer.hu/szorolap/OPT.CNC_127-151.pdf
Optimum BF20 Vario hardver, Optimum CNC vezérlődoboz VI, NCdrive szoftver
http://www.schleifer.hu/szorolap/OPT.CNC_127-151.pdf
Optimum BF20 Vario hardver, Optimum CNC vezérlődoboz VI, NCdrive szoftver
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 november 05, 19:53
Írta: besirkyjh Dátum 2012 november 05, 19:53
Szia
Nem irod hogy mindezt milyen sebességen ( mm/min ) milyen gyorsulással és melyik tipusu vezérlövel ( Power vagy a 40 voltos ) csinálja .
Honnan tudod hogy lépést téveszt ? Be van épitve a hellyére ? Miröl használod ? PC - laptop ?
Nem irod hogy mindezt milyen sebességen ( mm/min ) milyen gyorsulással és melyik tipusu vezérlövel ( Power vagy a 40 voltos ) csinálja .
Honnan tudod hogy lépést téveszt ? Be van épitve a hellyére ? Miröl használod ? PC - laptop ?
Cím: Re:Léptetőmotor
Írta: vvvsmkgjx Dátum 2012 november 05, 19:58
Írta: vvvsmkgjx Dátum 2012 november 05, 19:58
500 mm/min és 50-50mm/s gyorsulás és lassulásra van beállítva. A 40V-os vezérlővel van ellátva, és onnan gondolom, hogy 2x elindítva a programot, nem ugyanonnan kezdi el.
Cím: Re:Léptetőmotor
Írta: vvvsmkgjx Dátum 2012 november 05, 19:58
Írta: vvvsmkgjx Dátum 2012 november 05, 19:58
Ja és PC-ről megy a dolog
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 november 05, 20:38
Írta: besirkyjh Dátum 2012 november 05, 20:38
Hu ha .
Ezek abszolult " minimum" értékek .
Van lehetöséged hogy egy álltalunk jobban ismert szofttal probáld ki a gépet ? Pl : a Mach3 .Ebben jobban tudunk segiteni és szükülne a hibalehetöségek száma is .
Ingyen letölthetö ( azt hiszem 500 soros a korlát de minden más megy rajta ) . Elképzelhetö hogy az Ncdrive nem ad elég inpulzust a vezérlönek ?!
Minden tengelynél ugyan ez a jelenség ?
Ezek abszolult " minimum" értékek .
Van lehetöséged hogy egy álltalunk jobban ismert szofttal probáld ki a gépet ? Pl : a Mach3 .Ebben jobban tudunk segiteni és szükülne a hibalehetöségek száma is .
Ingyen letölthetö ( azt hiszem 500 soros a korlát de minden más megy rajta ) . Elképzelhetö hogy az Ncdrive nem ad elég inpulzust a vezérlönek ?!
Minden tengelynél ugyan ez a jelenség ?
Cím: Re:Léptetőmotor
Írta: kuv5p7226 Dátum 2012 november 05, 20:40
Írta: kuv5p7226 Dátum 2012 november 05, 20:40
Milyen a program?
Tényleg ugyanoda megy vissza ahonnan elindult?
Végálláskapcsoló játszhat? (Pl. kilazult)
Ha rövid a program, a g-kódot be tudod tenni?
Tényleg ugyanoda megy vissza ahonnan elindult?
Végálláskapcsoló játszhat? (Pl. kilazult)
Ha rövid a program, a g-kódot be tudod tenni?
Cím: Re:Léptetőmotor
Írta: vvvsmkgjx Dátum 2012 november 05, 20:56
Írta: vvvsmkgjx Dátum 2012 november 05, 20:56
Teljesen visszavettem, hátha az a baja, de nem. Mégis nekem úgy tűnik, mintha erőlködne a motor, amikor a mozgásokat végzi. Ezért kérdeztem rá, hogy megfelelő paramétereket adok-e meg. Olyan jelenség is szokott mutatkozni, hogy "mozgás" közben az asztal nem mozdul, de a motor zúg, viszont a pozíciómutató számlál. Nem minden tengelyen csak X és Y. A Z-vel nem volt bajom, pedig azt is ugyanaz hajtja. Esetleg megpróbálom más szofttal majd azután majd nyilatkozom mi történt.
Cím: Re:Léptetőmotor
Írta: vvvsmkgjx Dátum 2012 november 05, 21:07
Írta: vvvsmkgjx Dátum 2012 november 05, 21:07
Így nézne ki, miket kell beállítani a progiban:
http://www.kepfeltoltes.hu/view/121105/NCdrive2_www.kepfeltoltes.hu_.jpg
http://www.kepfeltoltes.hu/view/121105/NCdrive2_www.kepfeltoltes.hu_.jpg
Cím: Re:Léptetőmotor
Írta: vvvsmkgjx Dátum 2012 november 05, 21:09
Írta: vvvsmkgjx Dátum 2012 november 05, 21:09
Cím: Re:Léptetőmotor
Írta: 2dbfy8y Dátum 2012 november 05, 21:38
Írta: 2dbfy8y Dátum 2012 november 05, 21:38
Egy kis segítség Agyaggalamb-nak!

Cím: Re:Léptetőmotor
Írta: vvvsmkgjx Dátum 2012 november 05, 21:42
Írta: vvvsmkgjx Dátum 2012 november 05, 21:42
Köszönöm!
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 november 06, 07:55
Írta: besirkyjh Dátum 2012 november 06, 07:55
Szia
Esetleg meglehetne mérni a nyomaték igényt is ( hátha csak szorulása van a szánoknak ) .
Ugyan ugy mintha egy léptetöt mérnél csak itt léptetönélkül a tengelyre szereled a 100 mm-es erökart amit huzol pl egy halmérleggel ( az inditási érték az ami Neked most kel ) .Vedd figyelembe azt is hogy egy léptetö legnagyobb nyomatéka a "tarto " nyomaték ( tehát állás közben ) .Sleep mod kikapcsolva !!
Még esetleg az is segithet ha a gyorsulásbol vissza veszel a mostani 50-es értékböl mondjuk 5-re .Igy nem lesz jo az biztos de szükitheted a hiba keresést .
Esetleg meglehetne mérni a nyomaték igényt is ( hátha csak szorulása van a szánoknak ) .
Ugyan ugy mintha egy léptetöt mérnél csak itt léptetönélkül a tengelyre szereled a 100 mm-es erökart amit huzol pl egy halmérleggel ( az inditási érték az ami Neked most kel ) .Vedd figyelembe azt is hogy egy léptetö legnagyobb nyomatéka a "tarto " nyomaték ( tehát állás közben ) .Sleep mod kikapcsolva !!
Még esetleg az is segithet ha a gyorsulásbol vissza veszel a mostani 50-es értékböl mondjuk 5-re .Igy nem lesz jo az biztos de szükitheted a hiba keresést .
Cím: Re:Léptetőmotor
Írta: vvvsmkgjx Dátum 2012 november 07, 19:42
Írta: vvvsmkgjx Dátum 2012 november 07, 19:42
Időközben sikerült még valamit kitapasztalnom. Csak az X irányú léptetőmotorom téved már, de az is kiküszöbölhető, ha nem úgy állítom be a mérést mint a többinél. Az X, Y és Z tengelyeknél akkor lépte le a valós értéket, ha 1mm-es menetemelkedéshez adtam neki a 200 lépést. Tehát az orsó menetemelkedésének megfelelően állítottam be az ahhoz szükséges lépésszámot. De így az X tengelyem lépést veszt. X-nél csak akkor nem téveszt lépést, ha pl. 1mm megtételéhez a lépést 100-ra vagyis felére veszem. Viszont így ugye nem a valós értéket teszi meg X-ben. Mi lehet ennek az oka és mi lehet rá a megoldás szerintetek?
Cím: Re:Léptetőmotor
Írta: xfg6v697j Dátum 2012 november 07, 19:58
Írta: xfg6v697j Dátum 2012 november 07, 19:58
Ezzel a beállítással az X csak feleakkora sebességgel megy,min ha 200 lépést írsz,ezért a megoldás,az,hogy visszaveszed a sebességet alacsonyabra.
Ja és a gyorsuláast is.
Ja és a gyorsuláast is.
Cím: Re:Léptetőmotor
Írta: vvvsmkgjx Dátum 2012 november 07, 20:45
Írta: vvvsmkgjx Dátum 2012 november 07, 20:45
Az X esetére vagy a többire?
Cím: Re:Léptetőmotor
Írta: xfg6v697j Dátum 2012 november 07, 20:50
Írta: xfg6v697j Dátum 2012 november 07, 20:50
Csak az X-et kell lassítani.
Cím: Re:Léptetőmotor
Írta: vvvsmkgjx Dátum 2012 november 07, 21:11
Írta: vvvsmkgjx Dátum 2012 november 07, 21:11
Köszönöm!
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 november 07, 21:58
Írta: besirkyjh Dátum 2012 november 07, 21:58
Szia
Lehetetlennek tartom hogy egy 2.2Nm-es léptetövel nem tudsz a BF20-al 500mm/min sebességet ponrosan tartani .
Valami nem gömbölyü itt .
Helyileg merre vagy ? Hátha van valaki a közeledben aki segiteni tud !
Lehetetlennek tartom hogy egy 2.2Nm-es léptetövel nem tudsz a BF20-al 500mm/min sebességet ponrosan tartani .
Valami nem gömbölyü itt .
Helyileg merre vagy ? Hátha van valaki a közeledben aki segiteni tud !
Cím: Re:Léptetőmotor
Írta: kuv5p7226 Dátum 2012 november 07, 22:27
Írta: kuv5p7226 Dátum 2012 november 07, 22:27
Még a végén egy kontakthiba lesz.:-)
Cím: Re:Léptetőmotor
Írta: vvvsmkgjx Dátum 2012 november 07, 22:58
Írta: vvvsmkgjx Dátum 2012 november 07, 22:58
Helyileg Tiszaújváros. Ha lenne kit megkérdeznem aki ért hozzá és érdekli is, már megtettem volna.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 november 07, 23:27
Írta: besirkyjh Dátum 2012 november 07, 23:27
Ja ja . Általában az ilyen nagynak hitt dolgok olyasmikkel végzödnek :)
Sajnos még nem derült ki .
Sajnos még nem derült ki .
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 november 07, 23:32
Írta: besirkyjh Dátum 2012 november 07, 23:32
Nekem nincs olyan messze , de addig fussunk még pár kört :)
A programot probáltad cserélni , hidd el azzal könnyebben haladunk ?
A léptetönek milyen a tokozása ? Nema 23 ( 57x57mm ) vagy Nema 34-es ( azt hiszem 80x80-as ) ? Ha a többi tengely léptetöjét lehuzod a vezérlöröl vagy ki kapcsolod azok vezérlöjét akkor is ugyan ez a jelenség ( lassu és téveszt is ) ?
A programot probáltad cserélni , hidd el azzal könnyebben haladunk ?
A léptetönek milyen a tokozása ? Nema 23 ( 57x57mm ) vagy Nema 34-es ( azt hiszem 80x80-as ) ? Ha a többi tengely léptetöjét lehuzod a vezérlöröl vagy ki kapcsolod azok vezérlöjét akkor is ugyan ez a jelenség ( lassu és téveszt is ) ?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 november 09, 10:45
Írta: 000000000 Dátum 2012 november 09, 10:45
Uncsi kérdés de sajna már elfeledtem..:
6 kivezetéses motornál melyik az erősebb bekötési mód??
Illetve mi a külömbsig sebesség ,nyomaték terén??

6 kivezetéses motornál melyik az erősebb bekötési mód??
Illetve mi a külömbsig sebesség ,nyomaték terén??
Cím: Re:Léptetőmotor
Írta: xfg6v697j Dátum 2012 november 09, 11:12
Írta: xfg6v697j Dátum 2012 november 09, 11:12
A 2. kép nem egy lehetséges bekötés.
A soros,szerintem erősebb,de lassabb.
A párhuzamos erősebb,és gyorsabb,de hatvezetékes esetében úgy tudom nem lehetséges.
A szimpla tekercses a leggyengébb,de gyorsabb a soros ,és lassabb a párhuzamos bekötésűnél.
A soros,szerintem erősebb,de lassabb.
A párhuzamos erősebb,és gyorsabb,de hatvezetékes esetében úgy tudom nem lehetséges.
A szimpla tekercses a leggyengébb,de gyorsabb a soros ,és lassabb a párhuzamos bekötésűnél.
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2012 november 09, 12:44
Írta: Rabb Ferenc Dátum 2012 november 09, 12:44
Nézd meg, hogy a kapocslécnél (ha van egyáltalán ) nem lehet-e hozzáférni mind a nyolc tekercsvéghez. Ha igen, akkor ott a közös pontok megbontása után kötheted sorosan vagy párhuzamosan is.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 november 09, 17:22
Írta: 000000000 Dátum 2012 november 09, 17:22
Köszönöm!
Konkréten ez az a motor:
Ha netán megoldható a szétkötése akkor nekiálnék!
ESETLEG VAN E AKI SZEDETT MÁR SZÉTT ILYEN TIPUST???

Konkréten ez az a motor:
Ha netán megoldható a szétkötése akkor nekiálnék!
ESETLEG VAN E AKI SZEDETT MÁR SZÉTT ILYEN TIPUST???
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 november 09, 17:23
Írta: 000000000 Dátum 2012 november 09, 17:23
A piros és a kék a közép kivezetése...
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 09, 17:49
Írta: ANTAL GÁBOR Dátum 2012 november 09, 17:49
Szia ! Kockázatos szétszedni mert ha a forgórészt kihúzod akkor lemágneseződhet ( ment erről itt már sok okfejtés ). Egyáltalán nem biztos hogy a hátsó pajzs közelében lesz a közösített pont. Én hagynám a fenébe hadd menjen az sorosan a bipoláris üzemben ( persze ilyenkor a közepekkel nem kell foglalkozni Hidd el nem olyan rossz az az üzem sem ( 3427 es beírás )
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 november 09, 18:14
Írta: besirkyjh Dátum 2012 november 09, 18:14
Szia
Jol irja a Gábor .
A szétszedésnek csak akkor van értelme ha bipoláris párhuzamban akarod üzemeltetni a léptetödet .Minden más bipoláris variácio beköthetö a 6 vezetékes léptetökön .
Mikor milyen kedvem van és milyen vezérlöt használok hozzá vagy a közép és valamelyik szélsö , vagy csak a két szélsö vezetéket kötöm be ( persze a fázis azonos tekercseknél lévö vezetékekröl van szo ) .
Jol irja a Gábor .
A szétszedésnek csak akkor van értelme ha bipoláris párhuzamban akarod üzemeltetni a léptetödet .Minden más bipoláris variácio beköthetö a 6 vezetékes léptetökön .
Mikor milyen kedvem van és milyen vezérlöt használok hozzá vagy a közép és valamelyik szélsö , vagy csak a két szélsö vezetéket kötöm be ( persze a fázis azonos tekercseknél lévö vezetékekröl van szo ) .
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2012 november 09, 18:26
Írta: PSoft Dátum 2012 november 09, 18:26
Szia Gábor!
Ha tovább nem bontod,mint ahogy a képeken látod,"büntetlenül" megteheted.:)
Ezek a léptecsek,"könnyen" átköthetők nyolc vezetékesre.
A stekker-ben vannnak közösítve a kivezetések.
Nem egyet kötöttem már át nyolc vezetékesre.
Persze,kis kézügyesség,és egy nagyító kellhet a művelethez.:)
Te,...biztos,hogy meg tudnád csinálni az átalakítást.:)))









Ha tovább nem bontod,mint ahogy a képeken látod,"büntetlenül" megteheted.:)
Ezek a léptecsek,"könnyen" átköthetők nyolc vezetékesre.
A stekker-ben vannnak közösítve a kivezetések.
Nem egyet kötöttem már át nyolc vezetékesre.
Persze,kis kézügyesség,és egy nagyító kellhet a művelethez.:)
Te,...biztos,hogy meg tudnád csinálni az átalakítást.:)))
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 09, 18:58
Írta: ANTAL GÁBOR Dátum 2012 november 09, 18:58
Ok én nem voltam biztos benne hogy a hátsó pajzsig kivitték minkét szálat ez valószínűleg gyártmányfüggő . Egy kérdés:direkt gyorsan szétszedtél egyet ? Szépek a fotók ,ott van mind a 8 vezeték !
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2012 november 09, 19:05
Írta: PSoft Dátum 2012 november 09, 19:05
Igen,most szedtem szét egyet,hogy fotózni tudjam.
Két perc se kellett a szétszedéshez.:))
Különben tényleg "gyártmányfüggő",de ez a KH-xxx sorozat,mind így van közösítve.
Két perc se kellett a szétszedéshez.:))
Különben tényleg "gyártmányfüggő",de ez a KH-xxx sorozat,mind így van közösítve.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 november 09, 19:09
Írta: 000000000 Dátum 2012 november 09, 19:09
Köszönet az uraknak!!!
Holnap nekilátk és áttkötöm! (csak mert így a 4 vezetékkel igen gyengének tatom a mocikat)
Kipróbáltam az alábbi verziókat és igaz volt hogy a 2 változatban nem moccan a moci.,gondolom a tekercselés iránya kioltja a másikat)
[#worship][#worship]
Holnap nekilátk és áttkötöm! (csak mert így a 4 vezetékkel igen gyengének tatom a mocikat)
Kipróbáltam az alábbi verziókat és igaz volt hogy a 2 változatban nem moccan a moci.,gondolom a tekercselés iránya kioltja a másikat)
[#worship][#worship]
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 09, 19:14
Írta: svejk Dátum 2012 november 09, 19:14
Mert Vasas megérdemli mi? :))
Cím: Re:Léptetőmotor
Írta: hostya Dátum 2012 november 09, 19:17
Írta: hostya Dátum 2012 november 09, 19:17
© PSoft már csak ilyen, nem nézi hogy kinek segít..
[#eljen][#worship][#taps]
[#eljen][#worship][#taps]
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2012 november 09, 19:25
Írta: Rabb Ferenc Dátum 2012 november 09, 19:25
Ez egy öt kivezetéses motor. Egy kis NYÁK-lapon vannak az átkötések. Leforrasztva a nyolc tekercsvéget ez kiemelhető és át lehet vágni a rövidzárakat.

Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 09, 19:29
Írta: ANTAL GÁBOR Dátum 2012 november 09, 19:29
lemegyek a pincébe van egy leégett Sanyo Denki-m esküszöm megnézem ( még a végén menthető ) ki kellene találni azt a vascső áttolási technikát . Várom azok jelentkezését akik sikeresen vettek már ki forgórészt ( nem veszített a mágnes az erejéből )
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 november 09, 19:30
Írta: s7manbs8 Dátum 2012 november 09, 19:30
Na én is épp léptetőmotort akarok bekötni valahogy, de ezzel nincs gond, csak ki kell találni, melyik vezetéke melyik is.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 09, 19:31
Írta: ANTAL GÁBOR Dátum 2012 november 09, 19:31
egy jó kis összefoglaló ( gondolom Sir Nyeteg közlése )
https://sites.google.com/a/minibee.hu/minibee-hu/leptetomotorok-bekoetese
https://sites.google.com/a/minibee.hu/minibee-hu/leptetomotorok-bekoetese
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 november 09, 19:36
Írta: s7manbs8 Dátum 2012 november 09, 19:36
Jé, van is 5V-om, ez hat vezetékes. Amúgy nem lenne hülyeség egy adatbázist is csinálni képekkel, hogy amink van motorok, melyiknek mi a bekötése valami azonos formában bemutatva ... persze ez csak az új fórumon majd. Ahol rendszerezni jobban lehet.
Itt a két különálló csoportot nem volt nehéz megállapítani, mert ahhoz egy kis ellenállás mérés kellett, ezt még tegnap megcsináltam. Most jön a lépés sorrend megállapítás ez unipolárisan lesz kötve nekem.
Csak még nem tudom melyik a közép kivezetésük, de azt meg úgy meg lehet állapítani, hogy 3 vezeték van, melyik a közepe, ha benne van a közép akkor van ereje, ha nincs akkor gyengébb ? Ha a két szélsőre adok áramot ?
Itt a két különálló csoportot nem volt nehéz megállapítani, mert ahhoz egy kis ellenállás mérés kellett, ezt még tegnap megcsináltam. Most jön a lépés sorrend megállapítás ez unipolárisan lesz kötve nekem.
Csak még nem tudom melyik a közép kivezetésük, de azt meg úgy meg lehet állapítani, hogy 3 vezeték van, melyik a közepe, ha benne van a közép akkor van ereje, ha nincs akkor gyengébb ? Ha a két szélsőre adok áramot ?
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2012 november 09, 19:40
Írta: Rabb Ferenc Dátum 2012 november 09, 19:40
A középkivezetés beazonosításához miért nem elég a tegnapi ellenállásmérőd?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 november 09, 19:51
Írta: s7manbs8 Dátum 2012 november 09, 19:51
Mert olyan rossz a műszer, hogy a 0 Ohmot is 16-25 -nek mutatja, meg a 10Ohmot is, így aztán nem tudja betölteni a döntőbíró szerepét. :)
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2012 november 09, 19:53
Írta: Rabb Ferenc Dátum 2012 november 09, 19:53
Cseréld ki benne az elemet. Az jót szokott ilyenkor tenni
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2012 november 09, 19:54
Írta: PSoft Dátum 2012 november 09, 19:54
Jajjjmáááá!!!
Én © ANTAL GÁBOR Fórumtársunknak/barátomnak segítettem.:)))
Most akar lemenni a "pincébe" egy léptecsért (#3440),és azt "kicsontozni":)
Olvasd a #3433 utolsó mondatát is,ott a lényeg!:)))
Én © ANTAL GÁBOR Fórumtársunknak/barátomnak segítettem.:)))
Most akar lemenni a "pincébe" egy léptecsért (#3440),és azt "kicsontozni":)
Olvasd a #3433 utolsó mondatát is,ott a lényeg!:)))
Cím: Re:Léptetőmotor
Írta: hostya Dátum 2012 november 09, 19:56
Írta: hostya Dátum 2012 november 09, 19:56
Akkor dobjál össze hozzá gyorsan egy Weastone hidat, és máris jó lesz... :)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 november 09, 19:56
Írta: s7manbs8 Dátum 2012 november 09, 19:56
Na hirtelen ötlet, bekaptam a számba a 3 drótból 2-2-t és amelyik nagyon csípett az lesz a két szélső, mivel az a 3 kombinációból egy eset van, a másik pedig 2 eset. Műszer se kell, meg semmi segédeszköz, csak ennyi. Most jöhet a sorrend.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2012 november 09, 19:57
Írta: PSoft Dátum 2012 november 09, 19:57
#3447.:))
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 november 09, 19:58
Írta: s7manbs8 Dátum 2012 november 09, 19:58
Lehet nem ártana, igen régen látott újat.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 november 09, 19:59
Írta: s7manbs8 Dátum 2012 november 09, 19:59
Hasonlóan csípéssel meg lehet mondani azt is melyik 3 tartozik össze éppen.
Cím: Re:Léptetőmotor
Írta: Sz.József Dátum 2012 november 09, 20:03
Írta: Sz.József Dátum 2012 november 09, 20:03
Én így csináltam 6 vezetékesből 4 vezetékest (párhuzamos kapcsolás)
Az 1-est és a 2-est kellet felcserélni a 3-as pedig egy átkötés.
A két világosabb huzal az egyik tekercs a két sötétebb a másik tekercs.
A két világosabbat cseréltem fel (1-2), hogy a menetirányok jók legyenek...
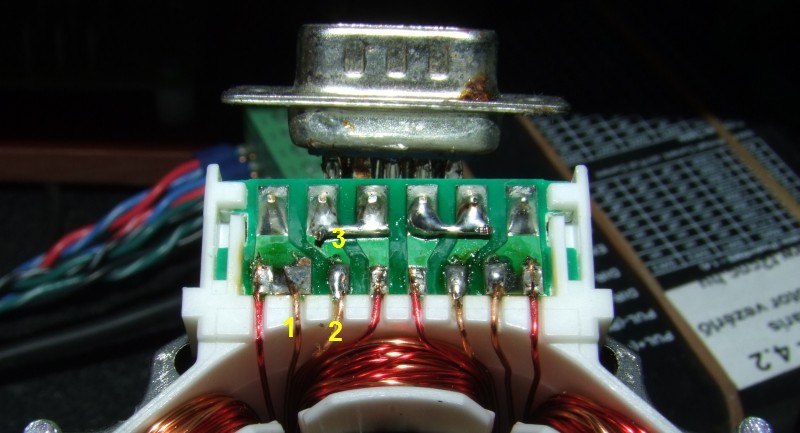
Az 1-est és a 2-est kellet felcserélni a 3-as pedig egy átkötés.
A két világosabb huzal az egyik tekercs a két sötétebb a másik tekercs.
A két világosabbat cseréltem fel (1-2), hogy a menetirányok jók legyenek...
Cím: Re:Léptetőmotor
Írta: hostya Dátum 2012 november 09, 20:03
Írta: hostya Dátum 2012 november 09, 20:03
Értem én... Meg érted Te is..
Meg értik mások is... [#wave]
Meg értik mások is... [#wave]
Cím: Re:Léptetőmotor
Írta: Sz.József Dátum 2012 november 09, 20:03
Írta: Sz.József Dátum 2012 november 09, 20:03
Persze a másik oldalon ugyan így...
Cím: Re:Léptetőmotor
Írta: Sz.József Dátum 2012 november 09, 20:07
Írta: Sz.József Dátum 2012 november 09, 20:07
Ez konkrétan egy SANYO DENKI 103H7823-0740-es motor.
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2012 november 09, 20:18
Írta: Rabb Ferenc Dátum 2012 november 09, 20:18
Remélem a hálózati fázis és vonali feszültséget azért nem nyaloszkóppal akarod beazonosítani. Mert ott is az egyik egy kicsit jobban csííííííííííííííííííííííp [#csodalk]
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 09, 20:35
Írta: ANTAL GÁBOR Dátum 2012 november 09, 20:35
Egy kis beszámoló : szétszedtem ( az első pajzsot is levettem )égésnek semmi nyoma de valahol menetzárlatos lehet A féltekercsek eredetileg 2.8 ohmosak és az egyiknél elveszett 0.9 ohm . Van valakinek egy kiterített tekercselési rajza ? Múltkor láttam egy jó szisztémát ahol a tekercselési irányokat kis illetve nagy betük jelölték ( pl 3 fázis esetén : AbCaBc stb de ez nem valóság csak példa )
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2012 november 09, 21:46
Írta: PSoft Dátum 2012 november 09, 21:46
Ha már,szóbahoztad.:)
Basszus,....nem találom a Weastone hidamat!!![#nemtudom]
Így,most csak "más tollával" tudok ékeskedni.:((

Viszont,....ezt meg megtaláltam!
Pedig,...nem is kerestem.:)))

Basszus,....nem találom a Weastone hidamat!!![#nemtudom]
Így,most csak "más tollával" tudok ékeskedni.:((
Viszont,....ezt meg megtaláltam!
Pedig,...nem is kerestem.:)))
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2012 november 09, 22:20
Írta: juh0557j0 Dátum 2012 november 09, 22:20
Jelentkezem!
Egyik esetben napokig volt 3 motor szétszedve. Áttekercseltem őket erősebbre.
Pár hónapja pedig 2db Berger Lahr is szét lett szedve csapágycserére, másik pedig forgórész takarításra. Olyan koszos volt, hogy nem forgott el.
Egyik esetben napokig volt 3 motor szétszedve. Áttekercseltem őket erősebbre.
Pár hónapja pedig 2db Berger Lahr is szét lett szedve csapágycserére, másik pedig forgórész takarításra. Olyan koszos volt, hogy nem forgott el.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 09, 22:37
Írta: ANTAL GÁBOR Dátum 2012 november 09, 22:37
Köszi. Azóta egy kis léptetőből kiszedtem a forgórészt hogy mindent jól meg lehessen nézni netán óvatosan meg lehessen gerjeszteni.Reményeim szerint egy belső mágnestér méréssel a menet irányok vissza fejthetők lennének ) Kutakodtam a neten is . Zavaró hogy a pólusokon két tekercs van (pl pirosas, ill sárgás vagy zöld ill sárgás zománcszigeteléssel A szisztéma nem egyezik a netről leszedett rajzokkal. Tudnál valami vázlatot küldeni ? A menetzárlatos motort vastagabb és kisebb menetszámú huzallal pespektivikusnak látom újratekerni
Cím: Re:Léptetőmotor
Írta: B.Tibor Dátum 2012 november 10, 00:30
Írta: B.Tibor Dátum 2012 november 10, 00:30
Nem a tekercselés a probléma, mert ha megfigyeled (remélem a tiéd is úgy van) elkezded dupla szállal egy póluson tekerni jobbra, kihagyod a következő pólust, és az utána levőt balra tekered, újra kihagysz egy pólust, a következőn jobbra tekered, kihagysz egyet, következőt balra, és körbeérsz. Megvan az egyik 4 kivezetés. (A lényeg az, hogy a következőt mindig az előzőhöz képest fordított menetirányban kell. De ha nem jól mondom, Attila biztos fog rá reagálni.)
És így jön ki a É-D-É-D pólusok. (Léptetőmotor animáció)
A következő 4 pólust ugyanígy csinálod, és megvan a 8 kivezetésed.
A bekötés már ki van tárgyalva.
A nagyobb probléma szerintem az, amit sajnos én is tapasztaltam, hogy a kivett forgórész mágneses ereje sajnos nekem is két motor esetében (fél év múlva tűnt fel, lehet, hogy már korábban is észrevehettem volna) észrevehetően gyengébb egy ugyanolyan motorhoz képest, amit sosem szedtem szét.
Az a motor, amiben jó erős mágnes volt (mint a mai modern motorokban is van), az még használható valamire, de a 5V 1A (1000 Ft-os) motor sajnos utána már a rezonanciákon lépést téveszt, és képes visszafelé is lépni, szerintem a legyengült mágnesű forgórész miatt. Az erősebb mágnesű motornál ezt a jelenséget nem vettem észre.
(Irigylem Szám Attilát, hogy neki nem gyengültek le a forgórészei szétszedés után.)
Véleményem szerint is ki kell kísérletezni a vascsöves módszert valamelyikünknek, lehet, hogy rászánok mégegy motort, amit szerettem volna erősebbre áttekercselni.
A forgórészt megpróbálom vascsőbe átcsúsztatni, és később össze tudom hasonlítani, mert még marad egy motor, ami eredeti lesz, és nem volt szétszedve.
És így jön ki a É-D-É-D pólusok. (Léptetőmotor animáció)
A következő 4 pólust ugyanígy csinálod, és megvan a 8 kivezetésed.
A bekötés már ki van tárgyalva.
A nagyobb probléma szerintem az, amit sajnos én is tapasztaltam, hogy a kivett forgórész mágneses ereje sajnos nekem is két motor esetében (fél év múlva tűnt fel, lehet, hogy már korábban is észrevehettem volna) észrevehetően gyengébb egy ugyanolyan motorhoz képest, amit sosem szedtem szét.
Az a motor, amiben jó erős mágnes volt (mint a mai modern motorokban is van), az még használható valamire, de a 5V 1A (1000 Ft-os) motor sajnos utána már a rezonanciákon lépést téveszt, és képes visszafelé is lépni, szerintem a legyengült mágnesű forgórész miatt. Az erősebb mágnesű motornál ezt a jelenséget nem vettem észre.
(Irigylem Szám Attilát, hogy neki nem gyengültek le a forgórészei szétszedés után.)
Véleményem szerint is ki kell kísérletezni a vascsöves módszert valamelyikünknek, lehet, hogy rászánok mégegy motort, amit szerettem volna erősebbre áttekercselni.
A forgórészt megpróbálom vascsőbe átcsúsztatni, és később össze tudom hasonlítani, mert még marad egy motor, ami eredeti lesz, és nem volt szétszedve.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 10, 07:00
Írta: ANTAL GÁBOR Dátum 2012 november 10, 07:00
Szia! Köszönöm a választ pont az írtad amit vártam , a képlet :ABabABab ( ezt a leírást a kefenélküli motort újratekerőknél láttam és nagyon szemléletes. ( powercroko? oldal ) Ahol A ill B egy egy fázis és a ill b ugyanaz a drót de ellenkező a menetirány . Kell a csőbehúzás de azt már nem látom olyan problémásnak ( persze én esztergálni fogom a csövet hogy a légrés ugyanolyan kicsi maradjon
Egyszer tárgyaltuk a dolgot Svejkkel , Érdekes lenne megtudni hogy egyáltalán hogyan mágnesezik föl a forgórészt. Az oké hogy beteszik a mágnesezőbe és beütik de utána már csak ilyen vascsöves módszerrel tehetik be a helyére. Vagy közvetlenül bent a motorban mágneseznek? ( pl nincs fönn a csapágy és egy egy lyukas mozgatható gyámmal alakítják ki a mágnest? szerintem ilyenkor az állórész vasa eléggé bezavar. Van egy idős barátom ( az Evig-nek volt a főkonstruktőre ő foglalkozik mágnesterek szgépes szimulációjával (FEMM) majd konzultálok vele )
Egyszer tárgyaltuk a dolgot Svejkkel , Érdekes lenne megtudni hogy egyáltalán hogyan mágnesezik föl a forgórészt. Az oké hogy beteszik a mágnesezőbe és beütik de utána már csak ilyen vascsöves módszerrel tehetik be a helyére. Vagy közvetlenül bent a motorban mágneseznek? ( pl nincs fönn a csapágy és egy egy lyukas mozgatható gyámmal alakítják ki a mágnest? szerintem ilyenkor az állórész vasa eléggé bezavar. Van egy idős barátom ( az Evig-nek volt a főkonstruktőre ő foglalkozik mágnesterek szgépes szimulációjával (FEMM) majd konzultálok vele )
Cím: Re:Léptetőmotor
Írta: B.Tibor Dátum 2012 november 10, 14:18
Írta: B.Tibor Dátum 2012 november 10, 14:18
A felmágnesezéssel kapcsolatban én is ezen agyalok ,hogy hogy oldják meg ezeket a dolgokat.
Most végre sikerült egy iránytű segítségével összehasonlításos alapon megmérni két egyforma motornak mágnes erősségének a különbségét.
Az eredeti motornál az iránytű 12 egységet mozdul ki ,a szétszedetnél már csak 8-at.
Bár ezeket a különbségeket már kézzel is jól lehet érezni.
Most végre sikerült egy iránytű segítségével összehasonlításos alapon megmérni két egyforma motornak mágnes erősségének a különbségét.
Az eredeti motornál az iránytű 12 egységet mozdul ki ,a szétszedetnél már csak 8-at.
Bár ezeket a különbségeket már kézzel is jól lehet érezni.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 10, 15:46
Írta: ANTAL GÁBOR Dátum 2012 november 10, 15:46
Én már megtaláltam a módját ( autocad rajz de átteszem pdf be ás megy a leveleződre ) Sajnos én nem tudok ide képet föltenni Várom az észrevételedet
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 10, 17:37
Írta: ANTAL GÁBOR Dátum 2012 november 10, 17:37
Elég sok szó esett már a 8 kivezetéses léptetőmotorok tekercs kivezetéseinek megállapításáról és a helyes bekötésről k Magam is végigolvastam néhányat de a részletekben sokszor elvesztem
Közzéteszek egy általam kipróbáltat hátha ez egyszerűbb mint a korábbiak
: Cél :párhuzamos tekercses bipoláris kötés egy frissen vásárolt 3.1 N m es Klaviós motor estében
1 lépés : ohmmérővel csipogóval az összetartozó vezeték párosok kimérése
Eredmény : fekete -fekete/fehér A
piros -piros /fehér B
zöld- zöld/fehér C
kék- kék/fehér D
Ezek után találomra egy tekercsre ( én az A ra 6 V AC ( 50 Hz) + soros 270 ohm és műszerrel keresem azt a tekercset ahol váltófesz mérhető. ( transzformátornak tekintjük a pólusokat ) Esetünkben ez a C lett
Megállapítás : tehát ezek tartoznak egy fázishoz
Ezek után egy vezérlőre rákötöttem a motort ( piko drive) a bekötés : az egyik fázis A a másik vagy B vagy D de semmiképpen sem C mert az a A hoz tartozik a váltófeszes mérés szerint . Én B t kötöttem és impulzusgenerátorról adtam a stepet és természetesen elindult a motor. ( egy- egy tekercses üzem )
Ezután meg kell állapítani a C nek a helyes irányát. Járó motor mellett az A tekerccsel párhuzamosan kötöttem a C t. Ha megállt és morgott a motor akkor az a rossz irány . Ha nem veszünk észre semmit akkor az a jó. Hasonlóan a fennmaradó D párhuzamosan kötve a B vel ha jó az irány akkor fut tovább a motor Egyéb adatok :Tápfesz: 24 V áramkorlátos, normál lecsengetés 20% tartóáram
Közzéteszek egy általam kipróbáltat hátha ez egyszerűbb mint a korábbiak
: Cél :párhuzamos tekercses bipoláris kötés egy frissen vásárolt 3.1 N m es Klaviós motor estében
1 lépés : ohmmérővel csipogóval az összetartozó vezeték párosok kimérése
Eredmény : fekete -fekete/fehér A
piros -piros /fehér B
zöld- zöld/fehér C
kék- kék/fehér D
Ezek után találomra egy tekercsre ( én az A ra 6 V AC ( 50 Hz) + soros 270 ohm és műszerrel keresem azt a tekercset ahol váltófesz mérhető. ( transzformátornak tekintjük a pólusokat ) Esetünkben ez a C lett
Megállapítás : tehát ezek tartoznak egy fázishoz
Ezek után egy vezérlőre rákötöttem a motort ( piko drive) a bekötés : az egyik fázis A a másik vagy B vagy D de semmiképpen sem C mert az a A hoz tartozik a váltófeszes mérés szerint . Én B t kötöttem és impulzusgenerátorról adtam a stepet és természetesen elindult a motor. ( egy- egy tekercses üzem )
Ezután meg kell állapítani a C nek a helyes irányát. Járó motor mellett az A tekerccsel párhuzamosan kötöttem a C t. Ha megállt és morgott a motor akkor az a rossz irány . Ha nem veszünk észre semmit akkor az a jó. Hasonlóan a fennmaradó D párhuzamosan kötve a B vel ha jó az irány akkor fut tovább a motor Egyéb adatok :Tápfesz: 24 V áramkorlátos, normál lecsengetés 20% tartóáram
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 10, 17:54
Írta: ANTAL GÁBOR Dátum 2012 november 10, 17:54
Lemaradt a végeredmény :
zöld+fekete /fehér közösitve és fekete +
zöld/fehér közösitve adja az egyik fázist
piros+kék/fehér közösítve és kék+piros/fehér közösítve adja a másik fázist .
Utánanéztem a Klaviós honlapon ott is ez az eredmény . Megjegyzés ők más betűket használnak a tekercsek jelölésénél ( nekem is szerencsésebb lett volna átvenni a jelölést de mentem a magam feje után )
zöld+fekete /fehér közösitve és fekete +
zöld/fehér közösitve adja az egyik fázist
piros+kék/fehér közösítve és kék+piros/fehér közösítve adja a másik fázist .
Utánanéztem a Klaviós honlapon ott is ez az eredmény . Megjegyzés ők más betűket használnak a tekercsek jelölésénél ( nekem is szerencsésebb lett volna átvenni a jelölést de mentem a magam feje után )
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2012 november 10, 18:55
Írta: PSoft Dátum 2012 november 10, 18:55
Majd,ha kidolgoztad a forgórész "csőbehúzásának" a technológiáját,...mesélj róla,hogy mit/hogyan csináltál.
Cím: Re:Léptetőmotor
Írta: fa_kukac Dátum 2012 november 10, 19:06
Írta: fa_kukac Dátum 2012 november 10, 19:06
Sziasztok! Az én biztos módszerem:
Ha megvannak a tekercs kivezetéspárok, akkor párhuzamos kötésnél összekapcsolok egy párt, és kézzel megforgatom. Ha nehezen forgatható, akkor biztos hogy nem jó! Az a lényeg, hogy a párok összekötésével simán ellenállás nélkül kell tudni elforgatni. Persze ez csak biztonsági ellenőrzés, mielőtt áramot adok rá a vezérlővel.
Ha megvannak a tekercs kivezetéspárok, akkor párhuzamos kötésnél összekapcsolok egy párt, és kézzel megforgatom. Ha nehezen forgatható, akkor biztos hogy nem jó! Az a lényeg, hogy a párok összekötésével simán ellenállás nélkül kell tudni elforgatni. Persze ez csak biztonsági ellenőrzés, mielőtt áramot adok rá a vezérlővel.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 10, 19:13
Írta: ANTAL GÁBOR Dátum 2012 november 10, 19:13
én már továbbmentem kidolgoztam az utólagos fölmágnesezési technikát majd elküldöm a leveleződre.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 10, 19:23
Írta: ANTAL GÁBOR Dátum 2012 november 10, 19:23
Ok és hogyan keresed meg a párokat. Van 4 tekercs ebből kettő kettő tartozik egy fázishoz Mi a módszer ?
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2012 november 10, 19:37
Írta: c2nsu773m Dátum 2012 november 10, 19:37
Ha egy léptetőmotornál csak a az van megadva hogy 4.5A és 0.68 ohm akkor hogyan kell kiszámolni , hogy hány N-os?
Cím: Re:Léptetőmotor
Írta: fa_kukac Dátum 2012 november 10, 19:48
Írta: fa_kukac Dátum 2012 november 10, 19:48
Egy tekercshez való 2 drótot ugyebár könnyű kimérni! 2tekercs párhuzamos kapcsolásakor csak 1 jó megoldás lehet, különben alig tudod forgatni. Tehát kezdetben 1 párhoz a maradék 3 párból csak a hozzávaló fázis vezetékének megfelelő rákötését engedi , különben nehéz mozdítani. Ha az első pár megvan, akkor már csak 2 féleképpen lehet bekötni a maradék két párat. Ha összedrótozva simán forgatod, akkor nem amortizálod le a vezérlődet!
Cím: Re:Léptetőmotor
Írta: fa_kukac Dátum 2012 november 10, 19:50
Írta: fa_kukac Dátum 2012 november 10, 19:50
Ja, a tekercsvégek azonosításához sem kell műszer. Fogok 1 kivezetést, és forgatva hozzáérintem valamelyikhez. Amikor megtorpan, és szinte letapad, az a párja.
Cím: Re:Léptetőmotor
Írta: fa_kukac Dátum 2012 november 10, 19:52
Írta: fa_kukac Dátum 2012 november 10, 19:52
Mármint kézzel forgatva természetesen.
Cím: Re:Léptetőmotor
Írta: Bencze András Dátum 2012 november 10, 20:00
Írta: Bencze András Dátum 2012 november 10, 20:00
Küld el légyszi nekem is, mert profi körülmények között is volt szívás rendesen. Csináltunk vasból áttolót, de nagyon kényes volt a légrésre, már 1-2 mm nagyságú mágneskör szakadás esetén is csak kb. a feléig lehetett felnyomni, pedig 10-15 A ment bele. Csak akkor szabad a forgót kihúzni, ha a tekercselni kell. A csapágyat is le lehet húzni kiszedés nélkül. A mágnes erősségét a legegyszerűbb az indukált fesz mérésére visszavezetni. Megpörgeted x adott és ismételhető fordulattal és méred a leadott feszt. Minél erősebb a mágnes annál nagyobb az indukált fesz. (Természetesen egyéb azonos körülmények között.)
Cím: Re:Léptetőmotor
Írta: Bencze András Dátum 2012 november 10, 20:01
Írta: Bencze András Dátum 2012 november 10, 20:01
Bocsi nem 10-15 A hanem 10-15 kA.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 10, 20:11
Írta: ANTAL GÁBOR Dátum 2012 november 10, 20:11
kipróbáltam működik de én a 3. 1 es motort a 8 as tengelyén alig tudtam megforgatni ( tettem rá egy tengelykapcsolót úgy ok ) Tetszik
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 november 10, 20:13
Írta: s7manbs8 Dátum 2012 november 10, 20:13
Most tartok ott a többnapi vajúdás után, hogy a léptetőmotorom sorrendjét ha minden igaz megtaláltam, most megpróbálom a távcső vezérlő dobozommal meghajtani, lépked e úgy, mint a birodalmi.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 10, 20:26
Írta: svejk Dátum 2012 november 10, 20:26
Számolni sehogy, hiszen nem ismered a forgórész mágnesének B-jét.
Mérni lehet, labortápról 4,5 A-t adsz neki és méred, mekkora nyomatékkal tudod kimozdítani tartóhelyzetéből. Ekkor megkapod a tartónyomatékot.
Mérni lehet, labortápról 4,5 A-t adsz neki és méred, mekkora nyomatékkal tudod kimozdítani tartóhelyzetéből. Ekkor megkapod a tartónyomatékot.
Cím: Re:Léptetőmotor
Írta: B.Tibor Dátum 2012 november 10, 20:28
Írta: B.Tibor Dátum 2012 november 10, 20:28
Én adok egy tekercsnek szabályozható tápon annyit ,hogy jól megfogja a motort .Ragasztok a motor tengelyére egy papír mutatót,hogy jól látható legyen a lépés.Azután párhuzamosan rá teszek egy tekercset a már feszültség alatt lévőre,ha nem mozdul akkor ő kell nekem.Ha erősebb lesz a motor fékezése akkor jó a párhuzamon kötés is.Ha meg cserélem a kivezetést egymáshoz képest a két tekercs kioltja egymást, akkor ezek biztos egy póluson vannak.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 10, 20:32
Írta: svejk Dátum 2012 november 10, 20:32
A 2 mm már biztos vesztéssel jár, ha hajlamos rá a mágnes.
Fontos még a vascső falvastagsága, hogy ne legyen túl nagy a "mágneses ellenállása".
Sajnos nem tudom a helyes szakkifejezés, amikor a vidi tárcsamotorokban cseréltem neodíniumra az eredetiket a boltban rögtön kiszámolta fickó, hogy elég-e nekem az az 5 mm-es eredeti hátsó lap a mágneskör záródásához.
elég volt.
Aki ismeri a számítás menetét legyen szíves tudassa velünk!
Fontos még a vascső falvastagsága, hogy ne legyen túl nagy a "mágneses ellenállása".
Sajnos nem tudom a helyes szakkifejezés, amikor a vidi tárcsamotorokban cseréltem neodíniumra az eredetiket a boltban rögtön kiszámolta fickó, hogy elég-e nekem az az 5 mm-es eredeti hátsó lap a mágneskör záródásához.
elég volt.
Aki ismeri a számítás menetét legyen szíves tudassa velünk!
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 10, 20:33
Írta: svejk Dátum 2012 november 10, 20:33
Hogy nézett ki fizikailag a tekercselrendezés a forgórész felmágnesezőn? Csak egy skicc elég.
Cím: Re:Léptetőmotor
Írta: Bencze András Dátum 2012 november 10, 20:39
Írta: Bencze András Dátum 2012 november 10, 20:39
Sajnos régen szigorlatoztam belőle, azóta sok reset volt...Ha nem lennék lusta előásni a jegyzeteimet biztos menne a dolog. Valószínű egyszerű, mert az "áramos" analógiának működni kell.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 10, 22:42
Írta: ANTAL GÁBOR Dátum 2012 november 10, 22:42
Van egy hipotézisem a vaslemez vastagságára de ahhoz hogy biztos legyek a dolgomban ismerni kellene a mágnesed vastagságát. Tipp 20 mm.
A hipotézis alapja a fluxusállandóság A neodímium zárt vaskörben kb 4 szer nagyobb indukciót hoz létre mint a felszinén ,ergó min a negyedrész vastagságú vas kell alá ( a másik méret a korongsugár de az kiesik )
A hipotézis alapja a fluxusállandóság A neodímium zárt vaskörben kb 4 szer nagyobb indukciót hoz létre mint a felszinén ,ergó min a negyedrész vastagságú vas kell alá ( a másik méret a korongsugár de az kiesik )
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 10, 22:45
Írta: ANTAL GÁBOR Dátum 2012 november 10, 22:45
Pontosabban max 20 mm vastag mágnes alá még elég a 5mm es lemez
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 10, 22:46
Írta: svejk Dátum 2012 november 10, 22:46
Inkább a levzetés érdekelne mint konkrét eset.
A neodínium mágneseknek vannak katalógusadatai, ebből pár másodperc alatt kiszámolt a figura a minimális vastagságot.
A neodínium mágneseknek vannak katalógusadatai, ebből pár másodperc alatt kiszámolt a figura a minimális vastagságot.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 10, 22:53
Írta: ANTAL GÁBOR Dátum 2012 november 10, 22:53
mit vezessek le ?
Rk*sm*Bm = Rk*svas* 4* Bm ( 4*Bm= B vas )
Rk, Bm kiejtése után :
Svas = sm/4
Bm = 0.3-0,4 T Bvas = 0.9-1.2T
Tehát min a negyede kell
Rk*sm*Bm = Rk*svas* 4* Bm ( 4*Bm= B vas )
Rk, Bm kiejtése után :
Svas = sm/4
Bm = 0.3-0,4 T Bvas = 0.9-1.2T
Tehát min a negyede kell
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 10, 23:01
Írta: svejk Dátum 2012 november 10, 23:01
És a Mágnes Miska felületének a nagysága amivel a vashoz kapcsolódik?
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 10, 23:10
Írta: ANTAL GÁBOR Dátum 2012 november 10, 23:10
A felület az nem más mint a Rk négyzet *PI. De az minkét oldalon szerepel Éppen azért csináltam csak egy metszetből dolgozó modellt Persze ez korongra hasábra ( állandó a vastagság minden metszetben) jó de pl golyó mágnesre nem. Tehát ha a Mágnes Miska golyó formájú akkor más a helyzet......
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 november 10, 23:15
Írta: 000000000 Dátum 2012 november 10, 23:15
Üdv! Érdeklődnék a motor márkák felől. Milyen megbízható márkák vannak, illetve miket kell kerülni? Mik a vélemények velük kapcsolatban, stb.. Külön érdekel a Maxon és a Vextra márka is.
Cím: Re:Léptetőmotor
Írta: vvvsmkgjx Dátum 2012 november 12, 08:51
Írta: vvvsmkgjx Dátum 2012 november 12, 08:51
57x57-es. Ha lehúzom a többi tengelyt a vezérlőről, akkor nem téveszt. Felcseréltem, az X és Y kivezetését is, hátha a motor nem stimmel, de ez esetben az Y tengelyem tévesztett. Tehát a hiba valahol a kivezetésnél lehet. Viszont ha lehúztam a többi tengelyt, akkor meg jó volt. Akkor hol lehet a hiba?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 november 12, 11:15
Írta: besirkyjh Dátum 2012 november 12, 11:15
Szia
Igen ez a Nema23-as mérete .
A tápod ha a vezérlök a helyén vannak és léptetö is van rajtuk ,hány voltot mutat .Hány wattos a trafod ? Mekkora puffer kondi van rajta ?Hány Amper/fázis kel a léptetöknek külön külön és hány voltosak ?
Lehet kicsi lesz a max feszültsége a vezérlödnek ( 40V ) ahhoz hogy jobb adatokat érj el ?
A közelmultban találkoztam egy hasonlo jelenséggel ahhol egy 12Nm-es léptetö nem ment 500mm/min felé bármit csináltunk ( Nema34 ) és egy vezérlö cserével oldodott meg a dolog , a régi 70voltos vezérlö ki lett cserélve 130voltosra és igy már jol ment (ötös golyosorsoval 4000mm/min pozisionálás az eddigi 500mm/min helyett ) .
Igen ez a Nema23-as mérete .
A tápod ha a vezérlök a helyén vannak és léptetö is van rajtuk ,hány voltot mutat .Hány wattos a trafod ? Mekkora puffer kondi van rajta ?Hány Amper/fázis kel a léptetöknek külön külön és hány voltosak ?
Lehet kicsi lesz a max feszültsége a vezérlödnek ( 40V ) ahhoz hogy jobb adatokat érj el ?
A közelmultban találkoztam egy hasonlo jelenséggel ahhol egy 12Nm-es léptetö nem ment 500mm/min felé bármit csináltunk ( Nema34 ) és egy vezérlö cserével oldodott meg a dolog , a régi 70voltos vezérlö ki lett cserélve 130voltosra és igy már jol ment (ötös golyosorsoval 4000mm/min pozisionálás az eddigi 500mm/min helyett ) .
Cím: Re:Léptetőmotor
Írta: vvvsmkgjx Dátum 2012 november 13, 21:10
Írta: vvvsmkgjx Dátum 2012 november 13, 21:10
Cím: Re:Léptetőmotor
Írta: vvvsmkgjx Dátum 2012 november 13, 21:13
Írta: vvvsmkgjx Dátum 2012 november 13, 21:13
http://kepfeltoltes.hu/view/121113/20121113710_www.kepfeltoltes.hu_.jpg
http://kepfeltoltes.hu/view/121113/20121113712_www.kepfeltoltes.hu_.jpg
http://kepfeltoltes.hu/view/121113/20121113713_www.kepfeltoltes.hu_.jpg
http://kepfeltoltes.hu/view/121113/20121113714_www.kepfeltoltes.hu_.jpg
http://kepfeltoltes.hu/view/121113/20121113715_www.kepfeltoltes.hu_.jpg
http://kepfeltoltes.hu/view/121113/20121113716_www.kepfeltoltes.hu_.jpg
http://kepfeltoltes.hu/view/121113/20121113717_www.kepfeltoltes.hu_.jpg
http://kepfeltoltes.hu/view/121113/20121113712_www.kepfeltoltes.hu_.jpg
http://kepfeltoltes.hu/view/121113/20121113713_www.kepfeltoltes.hu_.jpg
http://kepfeltoltes.hu/view/121113/20121113714_www.kepfeltoltes.hu_.jpg
http://kepfeltoltes.hu/view/121113/20121113715_www.kepfeltoltes.hu_.jpg
http://kepfeltoltes.hu/view/121113/20121113716_www.kepfeltoltes.hu_.jpg
http://kepfeltoltes.hu/view/121113/20121113717_www.kepfeltoltes.hu_.jpg
Cím: Re:Léptetőmotor
Írta: vvvsmkgjx Dátum 2012 november 13, 21:14
Írta: vvvsmkgjx Dátum 2012 november 13, 21:14
Inkább csak a linket adtam meg, hogy ne foglalja a helyet, valamint nekem nem sikerül képet soha beillesztenem, úgyhogy hagyom is :)
Lényegében erről a gépről lenne szó, minden adat ott van rajta amit kértél, egyedül még mérésre nem került sor, de amint megtudom közölni fogom.
Lényegében erről a gépről lenne szó, minden adat ott van rajta amit kértél, egyedül még mérésre nem került sor, de amint megtudom közölni fogom.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 november 13, 22:01
Írta: besirkyjh Dátum 2012 november 13, 22:01
Szia
Semmi gond , jok a képek !
Ezzel a vezérlövel a 2db L298-as IC vel elvileg 4A/fázist tudsz meghajtani .Az áram beállitást hogy csináltad , hány amperre van most állitva ?
Azt a 2200uf/63V kondit keveslem még akkor is ha csatornánként van egy egy belöle . Ennek a vezérlönek ha optimális az áram beállitás 35-36Volt DC elég a léptetödhöz .A motorhoz is az a trafo van ami a képen látszik ? Az a trafo adata ami doboz oldalán van ?
Semmi gond , jok a képek !
Ezzel a vezérlövel a 2db L298-as IC vel elvileg 4A/fázist tudsz meghajtani .Az áram beállitást hogy csináltad , hány amperre van most állitva ?
Azt a 2200uf/63V kondit keveslem még akkor is ha csatornánként van egy egy belöle . Ennek a vezérlönek ha optimális az áram beállitás 35-36Volt DC elég a léptetödhöz .A motorhoz is az a trafo van ami a képen látszik ? Az a trafo adata ami doboz oldalán van ?
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2012 november 13, 22:03
Írta: c2nsu773m Dátum 2012 november 13, 22:03
A 6203 max 2A tud , A táp 6A-es, milyenek a motorok?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 november 13, 22:08
Írta: besirkyjh Dátum 2012 november 13, 22:08
2db 298-as van benne . Ezt használja a Gravograph is ( fél fázis egy IC , fél fázis másik IC ) .
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 november 13, 22:09
Írta: besirkyjh Dátum 2012 november 13, 22:09
Neked van igazad tényleg 6203 van benne 2db .
Akkor az 4A igy is .
Akkor az 4A igy is .
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2012 november 13, 22:19
Írta: c2nsu773m Dátum 2012 november 13, 22:19
Ha 4A lenne akkor már alúl van méretezve a táp!
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2012 november 13, 22:30
Írta: c2nsu773m Dátum 2012 november 13, 22:30
Ez valami gyári vezérlő?
Nincs tulméretezve semmi , minden annyi , amenyi kell.
Cserélgetted a kártyákat?
Nem szoros a mechanika?
Nincs tulméretezve semmi , minden annyi , amenyi kell.
Cserélgetted a kártyákat?
Nem szoros a mechanika?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 november 13, 22:36
Írta: besirkyjh Dátum 2012 november 13, 22:36
A léptetö hány amperes lehet .
Megnéztem a 297 6203-párost és 4A-es a vezérlö .
Megnéztem a 297 6203-párost és 4A-es a vezérlö .
Cím: Re:Léptetőmotor
Írta: vvvsmkgjx Dátum 2012 november 14, 07:27
Írta: vvvsmkgjx Dátum 2012 november 14, 07:27
Semmit nem változtattam rajta, ez a gép így van mióta üzembe helyezték ezelőtt vagy 6-8 évvel, csak most életre akartam kelteni. Kártyákat nem cserélgettem benne. Vagyis próbáltam hátha azzal van valami, de nem. Úgyhogy minden a helyére került vissza.
A léptető adatai: Bi-polar 1.8fok, 2,2 Nm; 3A/2.5V
A léptető adatai: Bi-polar 1.8fok, 2,2 Nm; 3A/2.5V
Cím: Re:Léptetőmotor
Írta: vvvsmkgjx Dátum 2012 november 14, 07:29
Írta: vvvsmkgjx Dátum 2012 november 14, 07:29
A szoftverben áramerősséget nem tudok állítani csak az analóg kimeneti feszültség megadására van lehetőség. (min. max. érték)
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 november 14, 07:53
Írta: besirkyjh Dátum 2012 november 14, 07:53
Szia
A szoftverben nem is kel állítani , a kétpotméter az ami állitja .Az egyik a pihentetés áramát ( mikor a léptetö áll ) a másik a tartonyomatékát ) .Ha megnézed a PDF-et akkor azon mutatja is hogy melyik melyik .Az L297 referencia feszültségével kel az áramot állitani ( ne állitsd csak mérj ) van ott egy méröpont "ref" felirattal .Mennyit mutat a müszer ha arra mérsz ? Utánna nézek hogy ennél a két IC-s verzionál mi a pontos beállitás menete !
Lehet egy komplett kondi garnitura csere nem ártana ? Nem nagy összeg , az egész cseréje sem .Elég öregecskék már :)
A szoftverben nem is kel állítani , a kétpotméter az ami állitja .Az egyik a pihentetés áramát ( mikor a léptetö áll ) a másik a tartonyomatékát ) .Ha megnézed a PDF-et akkor azon mutatja is hogy melyik melyik .Az L297 referencia feszültségével kel az áramot állitani ( ne állitsd csak mérj ) van ott egy méröpont "ref" felirattal .Mennyit mutat a müszer ha arra mérsz ? Utánna nézek hogy ennél a két IC-s verzionál mi a pontos beállitás menete !
Lehet egy komplett kondi garnitura csere nem ártana ? Nem nagy összeg , az egész cseréje sem .Elég öregecskék már :)
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 november 14, 07:54
Írta: besirkyjh Dátum 2012 november 14, 07:54
Ez az érték most mennyire van állitva ?
Cím: Re:Léptetőmotor
Írta: wcsxp0uxa Dátum 2012 november 14, 08:42
Írta: wcsxp0uxa Dátum 2012 november 14, 08:42
Az L297-es ,léptetőmotor esetén 2x1 amper/fázist bír névleges áramot bír.
DC motort is lehet vele hajtani ,akkor bírja a 2Ampert.
Bizonyos kitöltési tényező mellett bírja az 1,3-is,de felette elszáll mint a győzelmi zászló!
DC motort is lehet vele hajtani ,akkor bírja a 2Ampert.
Bizonyos kitöltési tényező mellett bírja az 1,3-is,de felette elszáll mint a győzelmi zászló!
Cím: Re:Léptetőmotor
Írta: wcsxp0uxa Dátum 2012 november 14, 08:54
Írta: wcsxp0uxa Dátum 2012 november 14, 08:54
Ehhez a motorhoz nudli...
Ha ki akarod préselni belőle a maximumot , nyomatékra . Gravírozó gép esetén ,szerintem nem kell több neki ,hacsak nem akarod párhuzamos tekercs módban használni.
Ha ki akarod préselni belőle a maximumot , nyomatékra . Gravírozó gép esetén ,szerintem nem kell több neki ,hacsak nem akarod párhuzamos tekercs módban használni.
Cím: Re:Léptetőmotor
Írta: wcsxp0uxa Dátum 2012 november 14, 08:57
Írta: wcsxp0uxa Dátum 2012 november 14, 08:57
Ráadásul ,tapasztalataim szerint nem is szereti az alacsony ellenállású tekercsekkel készített motorokat.
Cím: Re:Léptetőmotor
Írta: wcsxp0uxa Dátum 2012 november 14, 09:58
Írta: wcsxp0uxa Dátum 2012 november 14, 09:58
Bocsánat , természetesen az l298 -ról értekeztem egy jót , de látom nem is az van benne.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 november 14, 12:12
Írta: besirkyjh Dátum 2012 november 14, 12:12
Szia
Biztos igazad van .
Akkor ideje lenne szolni a Gravographnak mert Ök a 2db L298-as IC-re 4A-es léptetöt tesznek már legalább 1986-ota :)
Nekem teljesen mindegy hogy mennyit bir vagy sem , müködjön az a lényeg !
Biztos igazad van .
Akkor ideje lenne szolni a Gravographnak mert Ök a 2db L298-as IC-re 4A-es léptetöt tesznek már legalább 1986-ota :)
Nekem teljesen mindegy hogy mennyit bir vagy sem , müködjön az a lényeg !
Cím: Re:Léptetőmotor
Írta: wcsxp0uxa Dátum 2012 november 14, 14:37
Írta: wcsxp0uxa Dátum 2012 november 14, 14:37
Sajnos ,mindig elfog a szenvedély amikor az l298-ról van szó. Az első áramkörömön ilyen volt (297-nélkül). Többször szóltam a panel forgalmazójának ,javítsa a tévedést (mindig megígérte , hogy majd megcsinálja). Valószínűleg így jobban "eladható" a termék.(kinek kell egy 1A-es léptető vezérlő?)
http://www.wvshare.com/datasheet/ST_PDF/L298.PDF
A félrevezető sorok:
IO Peak Output Current (each Channel)
– Non Repetitive (t = 100ms) 3A
–Repetitive (80% on –20% off; ton = 10ms) 2.5A
–DC Operation 2A
Viszont ezek az adatok az egész ic-re vonatkoznak.
A dc motormeghajtás esetén Hídba lehet kapcsolni a tok 2 részét , így tudja a 2A-t.
2 fázisnál viszont feleződnek az értékek.
A 0.5 Ohm-os ellenállások sem bírják.
Egyébként az l297 -klasszul megvédi ha nem tekeri az ember a potiját csutkára.
http://www.wvshare.com/datasheet/ST_PDF/L298.PDF
A félrevezető sorok:
IO Peak Output Current (each Channel)
– Non Repetitive (t = 100ms) 3A
–Repetitive (80% on –20% off; ton = 10ms) 2.5A
–DC Operation 2A
Viszont ezek az adatok az egész ic-re vonatkoznak.
A dc motormeghajtás esetén Hídba lehet kapcsolni a tok 2 részét , így tudja a 2A-t.
2 fázisnál viszont feleződnek az értékek.
A 0.5 Ohm-os ellenállások sem bírják.
Egyébként az l297 -klasszul megvédi ha nem tekeri az ember a potiját csutkára.
Cím: Re:Léptetőmotor
Írta: pbalazs Dátum 2012 november 14, 16:34
Írta: pbalazs Dátum 2012 november 14, 16:34
Bár még nem használtam ezt az IC-t, hadd értsem meg én is, mi vele a gond.
Az adatlapjában az van, hogy 1 csatorna (azaz 1 teljes híd) tudja a 2A-t DC-ben. Ez mindegyik csatornára igaz külön-külön. De ha nagyobb áram kell egy hídon, akkor párhuzamosan kötheted a két csatornát, és akkor már 3A mehet DC-ben.
Léptetőmotor esetén 2A-es tekercselés még megengedett, így egy IC egy motort tud meghajtani.
A te tapasztalatod szerint ez nem így van?
Az adatlapjában az van, hogy 1 csatorna (azaz 1 teljes híd) tudja a 2A-t DC-ben. Ez mindegyik csatornára igaz külön-külön. De ha nagyobb áram kell egy hídon, akkor párhuzamosan kötheted a két csatornát, és akkor már 3A mehet DC-ben.
Léptetőmotor esetén 2A-es tekercselés még megengedett, így egy IC egy motort tud meghajtani.
A te tapasztalatod szerint ez nem így van?
Cím: Re:Léptetőmotor
Írta: wcsxp0uxa Dátum 2012 november 15, 07:01
Írta: wcsxp0uxa Dátum 2012 november 15, 07:01
Igen.
a szótár szerint each chanel : mindegyik csatornát ,vagy minden csatornát jelent.(nagyon fincsi,jelenthet minden egyest is)
De ha megnézzük a hasonmása (6203) adatait minden értéke a duplája (az ára is) .Az tényleg csatornánként tudja (tudhatja) a 2A (annyit is mondanak rá úgy emlékszem) , de mondhatnák rá 4A-is ilyen módon.
A tesztet ilyen "különleges ügyosztályosan" végeztem ,de a 10 darabból egy sem bírta tovább 1,3A-nál.
Megépítettük a teszt áramkört is. Érdekesen megy tönkre némelyik , a karácsonyfa izzót lehet a hibás csatornával működtetni . Testvérem szerint nem is a híd megy tönkre leginkább. (magyarázta a blokk vázlatot ,de én stupid vagyok ezekhez a dolgokhoz)
A pdf 6-os képénél egy egy hidas dc motor kapcsolást mutatnak be ,szerintem az is alátámasztja amit mondok.
Az l297-essel kombinált esetben is vannak érdekességek, de azt még nem tudtam tönkre tenni soha.
a szótár szerint each chanel : mindegyik csatornát ,vagy minden csatornát jelent.(nagyon fincsi,jelenthet minden egyest is)
De ha megnézzük a hasonmása (6203) adatait minden értéke a duplája (az ára is) .Az tényleg csatornánként tudja (tudhatja) a 2A (annyit is mondanak rá úgy emlékszem) , de mondhatnák rá 4A-is ilyen módon.
A tesztet ilyen "különleges ügyosztályosan" végeztem ,de a 10 darabból egy sem bírta tovább 1,3A-nál.
Megépítettük a teszt áramkört is. Érdekesen megy tönkre némelyik , a karácsonyfa izzót lehet a hibás csatornával működtetni . Testvérem szerint nem is a híd megy tönkre leginkább. (magyarázta a blokk vázlatot ,de én stupid vagyok ezekhez a dolgokhoz)
A pdf 6-os képénél egy egy hidas dc motor kapcsolást mutatnak be ,szerintem az is alátámasztja amit mondok.
Az l297-essel kombinált esetben is vannak érdekességek, de azt még nem tudtam tönkre tenni soha.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 20, 19:23
Írta: ANTAL GÁBOR Dátum 2012 november 20, 19:23
A boncolás rovatban adatok hogy mi történik egy lépteccsel ha szétszedjük
Cím: Re:Léptetőmotor
Írta: zotykó Dátum 2012 november 23, 13:13
Írta: zotykó Dátum 2012 november 23, 13:13
Hello
A gépemben 0.6Nm-es motorokat akarok használni. Viszont az Viszont sajnos nem újak. Némelyiknek egy kicsit ki is van kopva a
csapágyazása. Ha cserélni akarom rajta a csapágyat, akkor szét kellene szedni a
motort, ami annak a tönkretétele is lenne egyben. Egy motort szétszedtem már
és amikor kivettem a forgórészt az állórészből akkor történt valami, amitől
sokkal gyengébb lett a motor azután. Az volt a tartalék mocim.
Mondták már többen, hogy ne húzzam ki a forgót az állórészből. De akkor nem férek hozzá a csapágyhoz, hogy kicseréljem.
-Hogy lehet ezt megoldani?
-Még fontosabb kérdés, hogy mi történik ilyenkor a motorban, hogy ez a drasztikus romlás megy végbe?
- Ha már meg történt, mit lehet tenni?
Köszi
A gépemben 0.6Nm-es motorokat akarok használni. Viszont az Viszont sajnos nem újak. Némelyiknek egy kicsit ki is van kopva a
csapágyazása. Ha cserélni akarom rajta a csapágyat, akkor szét kellene szedni a
motort, ami annak a tönkretétele is lenne egyben. Egy motort szétszedtem már
és amikor kivettem a forgórészt az állórészből akkor történt valami, amitől
sokkal gyengébb lett a motor azután. Az volt a tartalék mocim.
Mondták már többen, hogy ne húzzam ki a forgót az állórészből. De akkor nem férek hozzá a csapágyhoz, hogy kicseréljem.
-Hogy lehet ezt megoldani?
-Még fontosabb kérdés, hogy mi történik ilyenkor a motorban, hogy ez a drasztikus romlás megy végbe?
- Ha már meg történt, mit lehet tenni?
Köszi
Cím: Re:Léptetőmotor
Írta: hostya Dátum 2012 november 23, 14:24
Írta: hostya Dátum 2012 november 23, 14:24
Olvass vissza a #3431 környékén vannak okosságok.
Cím: Re:Léptetőmotor
Írta: Varga Ferenc Dátum 2012 november 23, 18:03
Írta: Varga Ferenc Dátum 2012 november 23, 18:03
Amikor tekercselni szoktam, csőbe húzom.
Cím: Re:Léptetőmotor
Írta: zotykó Dátum 2012 november 23, 18:15
Írta: zotykó Dátum 2012 november 23, 18:15
Kössz nézem.
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2012 november 24, 06:47
Írta: c2nsu773m Dátum 2012 november 24, 06:47
Engem már sokszor csőbe húztak , de sose erőtlenedtem el.....[#vigyor3]
Cím: Re:Léptetőmotor
Írta: s4fi8wsu Dátum 2012 november 24, 08:42
Írta: s4fi8wsu Dátum 2012 november 24, 08:42
Egyszer én is szétszedtem egy léptetőmotort, kíváncsi voltam a belsejére, persze az is legyengült, kézzel forgatva alig van ellenállása azokhoz képest, amit még nem szedtem szét.
A forgórészben van egy állandómágnes, ami gondolom fel van mágnesezve teljesen, és olyan könnyen nem veszíti el az erejét, a többi rész lemezelt vasmag, gondolom lágyvasból, ami nem őrzi meg a mágnesességet.
De akkor hol tárolódik a plusz mágnesesség?
Lehet, hogy a zárt mágneskörben?

Mi erről a véleményetek? Hogy lehet ezt visszaállítani?
A forgórészben van egy állandómágnes, ami gondolom fel van mágnesezve teljesen, és olyan könnyen nem veszíti el az erejét, a többi rész lemezelt vasmag, gondolom lágyvasból, ami nem őrzi meg a mágnesességet.
De akkor hol tárolódik a plusz mágnesesség?
Lehet, hogy a zárt mágneskörben?
Mi erről a véleményetek? Hogy lehet ezt visszaállítani?
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2012 november 24, 13:59
Írta: Szalai György Dátum 2012 november 24, 13:59
Fel kell mágnesezni.
Cím: Re:Léptetőmotor
Írta: s4fi8wsu Dátum 2012 november 24, 15:23
Írta: s4fi8wsu Dátum 2012 november 24, 15:23
Meg tudnád mondani, hogy hogyan?
Cím: Re:Léptetőmotor
Írta: xrd63aazf Dátum 2012 november 24, 18:53
Írta: xrd63aazf Dátum 2012 november 24, 18:53
Erre én is nagyon kiváncsi lennék, mivel hasonló helyzetbe vagyok mint Attila_21 forumtársunk. Meglehet-e ezt házilag oldani?
Elöre is köszönöm a választ.
Elöre is köszönöm a választ.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 24, 20:07
Írta: svejk Dátum 2012 november 24, 20:07
Érdekes, hogy mostanában nagyon sok embernek legyengül a motorja, holott pár éve hitetlenkedtek, szinte kérdőre vontak ezzel a dologgal még a tapasztalt nagyok is.
Antal Gábor fórumtársunk mostanában komolyan foglalkozik a felmágnesezés lehetőségével, itt a fórumon még senki nem tudta megmondani, hogy csinálják a gyárban.
Jó angolos, láptetőkkel tisztában levő valaki pedig szerintem gyorsan ki tudná guglizni a tutit.
Én már rég nem foglalkozom léptetőmotorokkal, az újabbaknál pedig állítólag nincs ez a jelenség.
Antal Gábor fórumtársunk mostanában komolyan foglalkozik a felmágnesezés lehetőségével, itt a fórumon még senki nem tudta megmondani, hogy csinálják a gyárban.
Jó angolos, láptetőkkel tisztában levő valaki pedig szerintem gyorsan ki tudná guglizni a tutit.
Én már rég nem foglalkozom léptetőmotorokkal, az újabbaknál pedig állítólag nincs ez a jelenség.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 24, 20:07
Írta: svejk Dátum 2012 november 24, 20:07
Olvasd el a "Szétszedtem..." topic utolsó pár oldalát.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 24, 20:47
Írta: ANTAL GÁBOR Dátum 2012 november 24, 20:47
Pár napja már magyaráztam . Most talán sikerül érthetőbben: A mágneseknek ismerni kell az un lemágnesezési görbéjét ( ha valakit érdekel a diagram akkor GOOGLE " alnico magnet demagnetisation curve " vagy neodymium magnet.... ha erre a görbére rászerkesztjük a levegő BH görbéjét Pl az origót összekötjük az 1 tesla ill 800 kA/ m koordinátájú ponttal mű = B/ H =1/800000 = 1.25 *10ad-6 akkor megkapjuk a műnull egyenest . Az egyenes metszi a lemágnesezési görbét. Ha a metszéspont a mágnes könyökpontja alatt van akkor a mágnes levegőn ezt tudja teljesíteni, és erősebb csak egy olyan (újra)felmágnesezéssel lesz amikor a nincs vagy csak nagyon kicsi a légrés . Az alniconál ( ez van a léptecsben ) a levegőben a könyökpont alá kerülünk. A neodymium az más. Ott normál hőmérsékleten a könyökpont fölötti szakaszon alakul ki a munkapont . Persze ha 100fokon vizsgálnánk akkor már necces
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2012 november 24, 20:53
Írta: Szalai György Dátum 2012 november 24, 20:53
Meg. De a megvalósítását nem ajánlom, ha nincsen ehhez megfelelő végzettséged és tapasztalatod.
Kezdetnek van egy gyenge mágnesű léptetőmotorod.
Minimálisan van még egy kevés menetű tekercsed bazi vastag zománc selyem szigetelésű rézhuzalból ( 5me. 25mm2 CuZS) Egy hatalmas kondenzátorod. (DC 10000uF 400V) Egy izzószálas villanykörtéd. (230V 100W) Egy 400V-on 2000A körüli áramot bekapcsolni képes GTO tárcsa tirisztorod a szerlvényeivel. Egy 400V 5A egyenirányító hidad. (Graetz) Két darab, hálózati feszültségen sem életveszélyes nyomógombod. (230V 5A) Egy csomó célszerű formájú vasdarabod, nagyon nagy mágneses permeabilitású anyagból.
Pár darab csavar meg egy kis drót és kész az egész.
Ha ezek együtt vannak a konyha asztalon, akkor kezdődhet az összeszerelés.
Először az elektromos része, azután a tekercsbe bele a vasakat, közéjük a motor forgórésze, és FÉLREHÚZVA rá az állórész. (Muszáj félrehúzni az állórészt, mert különben söntöli majd az értékes erővonalainkat.)
Ha minden összeállt egybe, akkor jöhet a buli. Mindenki mást küldjünk ki a helységből és csak hajtsuk be utánuk az ajtót. Győződjünk meg, hogy biztosan kukucskálnak-e a kulcslyukon, mert kell az elsősegélynyújtó, ha velünk baj történik.
A hálózati 230V csatlakoztatásakor, az egyenirányító hídon keresztül, szép lassan kezd is töltődni a kondenzátor. A vele sorosan kötött villanykörte felvillan, vigyáz rá, hogy a töltés kezdetén ne vehessen fel 0,5A-tól nagyobb áramot.
Pár másodperc múlva, (ha a kezdeti töltődés már megtörtént) meg lehet nyomni az Ny1 nyomógombot. Ezzel áthidaljuk a villanykörtét, és készre töltjük a kondenzátort, a lehető leg magasabb feszültségre.
Most jön egy nagyon fontos lépés!
ENGEDJÜK FEL AZ Ny1 NYOMÓGOMBOT, ÉS RÖGTÖN HÚZZUK KI A DELEJEZŐT A KONNEKTORBÓL!!!
Ha már nem csatlakozik a konnektorba, akkor tűűűz. Megnyomni az Ny2 gombot.
Ny2 megnyomásakor, a tirisztor, a másodperc tízezred része alatt rákapcsolja a kondenzátorban tárolt töltést a tekercsre. A tekercsben ettől bazi nagy áram alakul ki hirtelen, ami óriási mágneses impulzust kelt egy rövid időre. A nagy permeabilitású vasak ennek a rengeteg erővonalnak a nagy részét elvezetik a léptetőmotor forgórészébe és az abban lévő mágnes gyűrűbe.
Feldelejeztük a forgórész mágnes gyűrűjét.
Nem marad más, mint visszatolni az állórészt a forgóra, hogy a vasak leszerelése után is zárt maradjon a mágneses kör. Azután szétszerelhetjük a vasakat.
Nem véletlenül rajzoltam vastaggal a kondenzátor, tekercs és tirisztor áramkörének vezetékeit. Ott a lehető leg nagyobb áramra törekszünk, ezért a vezetékek keresztmetszete végig megegyező a tekercselő vezeték keresztmetszetével. Ennek a nagy áramnak nagy dinamikus ereje lesz, ezért merev sínszerű vezetékekkel, mechanikailag is masszív kötésekkel szerelünk.
A többi már lehet a villanyszerelésben megszokott PVC szigetelésű hajlékony MKH típusú, vagy H07V-K jelű 300/500V feszültségű 1,5mm2 vezeték.
Az Ny1 és Ny2 nyomógombokat azért rajzoltam távolabb a kapcsolás többi részétől, hogy az fizikailag is legyen elvezetve egy három eres kábelen, biztonságos távolba a veszélyzónától.
Ha csak magam dolgozom ezzel a berendezéssel, csak ritkán, kísérletek céljára használom, akkor nem tennék bele biztosítékot, főkapcsolót és zavarszűrőt sem. Ezért ezeket nem is rajzoltam bele. Megvan hozzá a végzettségem és szakértelmem, hogy ismerjem és elkerüljem a veszélyeit. De ha más kezébe is kerül, akkor csak a vonatkozó szabványok és előírások szerinti szerelés és kiépítés jöhet szóba. Hobbyistának nem javaslom a kísérletet. Aki mégis megpróbálja, az nagyon vigyázzon magára és a környezetére.
Remélem nem rontottam el semmit, ha mégis akkor javítsatok.
Kezdetnek van egy gyenge mágnesű léptetőmotorod.
Minimálisan van még egy kevés menetű tekercsed bazi vastag zománc selyem szigetelésű rézhuzalból ( 5me. 25mm2 CuZS) Egy hatalmas kondenzátorod. (DC 10000uF 400V) Egy izzószálas villanykörtéd. (230V 100W) Egy 400V-on 2000A körüli áramot bekapcsolni képes GTO tárcsa tirisztorod a szerlvényeivel. Egy 400V 5A egyenirányító hidad. (Graetz) Két darab, hálózati feszültségen sem életveszélyes nyomógombod. (230V 5A) Egy csomó célszerű formájú vasdarabod, nagyon nagy mágneses permeabilitású anyagból.
Pár darab csavar meg egy kis drót és kész az egész.
Ha ezek együtt vannak a konyha asztalon, akkor kezdődhet az összeszerelés.
Először az elektromos része, azután a tekercsbe bele a vasakat, közéjük a motor forgórésze, és FÉLREHÚZVA rá az állórész. (Muszáj félrehúzni az állórészt, mert különben söntöli majd az értékes erővonalainkat.)
Ha minden összeállt egybe, akkor jöhet a buli. Mindenki mást küldjünk ki a helységből és csak hajtsuk be utánuk az ajtót. Győződjünk meg, hogy biztosan kukucskálnak-e a kulcslyukon, mert kell az elsősegélynyújtó, ha velünk baj történik.
A hálózati 230V csatlakoztatásakor, az egyenirányító hídon keresztül, szép lassan kezd is töltődni a kondenzátor. A vele sorosan kötött villanykörte felvillan, vigyáz rá, hogy a töltés kezdetén ne vehessen fel 0,5A-tól nagyobb áramot.
Pár másodperc múlva, (ha a kezdeti töltődés már megtörtént) meg lehet nyomni az Ny1 nyomógombot. Ezzel áthidaljuk a villanykörtét, és készre töltjük a kondenzátort, a lehető leg magasabb feszültségre.
Most jön egy nagyon fontos lépés!
ENGEDJÜK FEL AZ Ny1 NYOMÓGOMBOT, ÉS RÖGTÖN HÚZZUK KI A DELEJEZŐT A KONNEKTORBÓL!!!
Ha már nem csatlakozik a konnektorba, akkor tűűűz. Megnyomni az Ny2 gombot.
Ny2 megnyomásakor, a tirisztor, a másodperc tízezred része alatt rákapcsolja a kondenzátorban tárolt töltést a tekercsre. A tekercsben ettől bazi nagy áram alakul ki hirtelen, ami óriási mágneses impulzust kelt egy rövid időre. A nagy permeabilitású vasak ennek a rengeteg erővonalnak a nagy részét elvezetik a léptetőmotor forgórészébe és az abban lévő mágnes gyűrűbe.
Feldelejeztük a forgórész mágnes gyűrűjét.
Nem marad más, mint visszatolni az állórészt a forgóra, hogy a vasak leszerelése után is zárt maradjon a mágneses kör. Azután szétszerelhetjük a vasakat.
Nem véletlenül rajzoltam vastaggal a kondenzátor, tekercs és tirisztor áramkörének vezetékeit. Ott a lehető leg nagyobb áramra törekszünk, ezért a vezetékek keresztmetszete végig megegyező a tekercselő vezeték keresztmetszetével. Ennek a nagy áramnak nagy dinamikus ereje lesz, ezért merev sínszerű vezetékekkel, mechanikailag is masszív kötésekkel szerelünk.
A többi már lehet a villanyszerelésben megszokott PVC szigetelésű hajlékony MKH típusú, vagy H07V-K jelű 300/500V feszültségű 1,5mm2 vezeték.
Az Ny1 és Ny2 nyomógombokat azért rajzoltam távolabb a kapcsolás többi részétől, hogy az fizikailag is legyen elvezetve egy három eres kábelen, biztonságos távolba a veszélyzónától.
Ha csak magam dolgozom ezzel a berendezéssel, csak ritkán, kísérletek céljára használom, akkor nem tennék bele biztosítékot, főkapcsolót és zavarszűrőt sem. Ezért ezeket nem is rajzoltam bele. Megvan hozzá a végzettségem és szakértelmem, hogy ismerjem és elkerüljem a veszélyeit. De ha más kezébe is kerül, akkor csak a vonatkozó szabványok és előírások szerinti szerelés és kiépítés jöhet szóba. Hobbyistának nem javaslom a kísérletet. Aki mégis megpróbálja, az nagyon vigyázzon magára és a környezetére.
Remélem nem rontottam el semmit, ha mégis akkor javítsatok.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 24, 21:07
Írta: svejk Dátum 2012 november 24, 21:07
Cím: Re:Léptetőmotor
Írta: s4fi8wsu Dátum 2012 november 24, 21:15
Írta: s4fi8wsu Dátum 2012 november 24, 21:15
Kedves György és Gábor!
Köszönöm a kimerítő válaszokat. Azt hiszem inkább gyengén hagyom azt a léptetőmotort.[#worship]
Köszönöm a kimerítő válaszokat. Azt hiszem inkább gyengén hagyom azt a léptetőmotort.[#worship]
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 24, 21:26
Írta: svejk Dátum 2012 november 24, 21:26
Te csináltál már ilyet amit leírtál?
Mert, 10000 uF 400V-os kondit nem minden fűszeresnél kapni. Többet sorba kötve pedig rontunk az ESR-en.
Az Ny1 felesleges, ha már kialudt a lámpa, akkor a kondi feszültsége legalább 300 V, de ha vár még pár másodpercet akkor eléri a teljes feszültséget.
Én már mágneseztem fel DC motorokat, és az első, ránézésre fontos tételtől, -miszerint a kondenzátorban tárolt energia a a feszültségétől négyzetesen függ- eltérően én nem vettem észre az áttörő különbséget, nekem elég volt a 100 V körüli fesz, 20-30 ezer uF.
Mert, 10000 uF 400V-os kondit nem minden fűszeresnél kapni. Többet sorba kötve pedig rontunk az ESR-en.
Az Ny1 felesleges, ha már kialudt a lámpa, akkor a kondi feszültsége legalább 300 V, de ha vár még pár másodpercet akkor eléri a teljes feszültséget.
Én már mágneseztem fel DC motorokat, és az első, ránézésre fontos tételtől, -miszerint a kondenzátorban tárolt energia a a feszültségétől négyzetesen függ- eltérően én nem vettem észre az áttörő különbséget, nekem elég volt a 100 V körüli fesz, 20-30 ezer uF.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 24, 21:33
Írta: ANTAL GÁBOR Dátum 2012 november 24, 21:33
Szerintem egy pár dolgot kihagytál:
1, nulldióda a mágnesező tekerccsel párhuzamosan
2 Gate áramkorlátozó ellenállás
Egy kicsit túlzó is amit irsz. A mágnes beütéséhez a Hc duplája az irodalmi adatok szerint elég Az alnico Hc je kb 100kA /m tehát a beütéshez kb 200 kA/m kell Ha a mágnes mondjuk 10 mm akkor 2000ampermenet jön ki ami 5 menettel csak 400 Amper. De a vas is fogyaszt ( mert azt kb 1.3 tesláig föl kell gerjeszteni aminek a számolása elég nehézkes de még pucu vassal is kevesebb mint a mágnesé ( én C45 re kiszámoltam mert annak ismerem a B-H görbéjét )
summa 1000 Amper alatt megúszható. Amit rajzoltál az azért érdekes mert kb egy hete elküldtem Svejknek a változatomat és egyezik az elképzelésünk
1, nulldióda a mágnesező tekerccsel párhuzamosan
2 Gate áramkorlátozó ellenállás
Egy kicsit túlzó is amit irsz. A mágnes beütéséhez a Hc duplája az irodalmi adatok szerint elég Az alnico Hc je kb 100kA /m tehát a beütéshez kb 200 kA/m kell Ha a mágnes mondjuk 10 mm akkor 2000ampermenet jön ki ami 5 menettel csak 400 Amper. De a vas is fogyaszt ( mert azt kb 1.3 tesláig föl kell gerjeszteni aminek a számolása elég nehézkes de még pucu vassal is kevesebb mint a mágnesé ( én C45 re kiszámoltam mert annak ismerem a B-H görbéjét )
summa 1000 Amper alatt megúszható. Amit rajzoltál az azért érdekes mert kb egy hete elküldtem Svejknek a változatomat és egyezik az elképzelésünk
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 24, 21:37
Írta: svejk Dátum 2012 november 24, 21:37
Tanúsítom! [#worship]
Cím: Re:Léptetőmotor
Írta: zotykó Dátum 2012 november 24, 21:42
Írta: zotykó Dátum 2012 november 24, 21:42
Szóval végig olvastam a topikot, de fölösleges volt, mert nem írta le senki, hogy mit lehet tenni ha kihúztuk a léptetőmotorból a forgórészt. Miért gyengül le, hogy lehet kiszedni úgy, hogy ne menjen tönkre és hogy lehet fölmágnesezni?
Aki tud valamit erről kérem írjon.
Kössz.
Aki tud valamit erről kérem írjon.
Kössz.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 24, 21:43
Írta: svejk Dátum 2012 november 24, 21:43
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 24, 21:45
Írta: svejk Dátum 2012 november 24, 21:45
Lásd #3526, főleg az a rész:
"itt a fórumon még senki nem tudta megmondani, hogy csinálják a gyárban."
"itt a fórumon még senki nem tudta megmondani, hogy csinálják a gyárban."
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 24, 21:50
Írta: svejk Dátum 2012 november 24, 21:50
Mi az oka, hogy a linken és Szali György szerint is a tekercsnek (terhelés) a katódkörben a helye?
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 24, 21:50
Írta: ANTAL GÁBOR Dátum 2012 november 24, 21:50
Az a fontos hogy kialakuljon az áram ami a tekercs (és kondi belső ) ellenállásától induktivitásától a kapacitás nagyságától és a kondi feszültségétől függ. Ez definiálja a szükséges energiát a kondiban . Az a jó ha az áram aperiodikusan cseng le mert akkor nem alakul ki az ellenfázisú lemágnesezés. Ha légmagos a tekercs akkor viszonylag könnyen számolható a dolog ( ha valakit érdekel akkor van jó anyagom ) A vasasnál nagyon érdekes mert a mű a beütés során ( a telítődés miatt ) folyamatosan csökken és ezzel csökken a tekercs induktivitása. vagyis a diff egyenletet a klasszikus matematika szerint nem lehet megoldani Viszont alnicot csak vaskörben lehet felmágnesezni
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 24, 22:02
Írta: ANTAL GÁBOR Dátum 2012 november 24, 22:02
Zotykó!! 3528 ban most írtam le hogy miért gyengül le. A boncolásban is találsz anyagot (1260 ha jól emlékszem ) a vascsöves szétszedésről . És most írt Szalai Gyuri egy mágnesezőről .
Tehát a válaszok :ha kihúztuk és legyengült akkor föl kell mágnesezni, a legyengülés : azért mert a munkapont a levegőn lement a mágnes BH görbéjének könyökpontja alá Szerencsés esetben vascsővel szét lehet szedni de nálam a tekercsfej akadályozott ( 25% veszteség a B ből) Egy mágnesező a 3529 ben
Tehát a válaszok :ha kihúztuk és legyengült akkor föl kell mágnesezni, a legyengülés : azért mert a munkapont a levegőn lement a mágnes BH görbéjének könyökpontja alá Szerencsés esetben vascsővel szét lehet szedni de nálam a tekercsfej akadályozott ( 25% veszteség a B ből) Egy mágnesező a 3529 ben
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 24, 22:12
Írta: ANTAL GÁBOR Dátum 2012 november 24, 22:12
Én anódkörbe tenném . Lehet hogy a kondi háza a mínusz és tekercs egy pontját is ide akarta rakni Viszont a japán rajz graetz e is hibásan van rajzolva. Még ha sematikusan is akarja ábrázolni akkor is furcsa hogy egy graetz váltó pontja közös a Dc mínusszal
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 24, 22:22
Írta: svejk Dátum 2012 november 24, 22:22
Én mindig kerülöm a katód terhelést ilyen thirisztoroknál.
Persze vannak esetek amikor elkerülhetetlen, de ugye akkor szintilleszteni kell a gate kört, célszerűen impulzustrafóval.
Ha valaki felvilágosítana ennek a kapcsolásnak az előnyétől azt megköszönném.
Jelen esetben az sem játszik szerepet, hogy a gate áram "kárba vész", hiszen nagyságrendekkel kisebb a főáramkörben folyó áramnál.
Persze vannak esetek amikor elkerülhetetlen, de ugye akkor szintilleszteni kell a gate kört, célszerűen impulzustrafóval.
Ha valaki felvilágosítana ennek a kapcsolásnak az előnyétől azt megköszönném.
Jelen esetben az sem játszik szerepet, hogy a gate áram "kárba vész", hiszen nagyságrendekkel kisebb a főáramkörben folyó áramnál.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 24, 22:26
Írta: svejk Dátum 2012 november 24, 22:26
Az a része a rajznak fel sem tűnt, hiszen nem az a lényeg.
)gondolom csak egy diódát akart használni belőle, de az is rosszul sikerült. :) Ö
Egyébként felesleges is a Greatz, bőven elég az egyutas egyenirányítás egy db diódával, hiszen csak alkalomszerűen kell feltölteni a kondit.
)gondolom csak egy diódát akart használni belőle, de az is rosszul sikerült. :) Ö
Egyébként felesleges is a Greatz, bőven elég az egyutas egyenirányítás egy db diódával, hiszen csak alkalomszerűen kell feltölteni a kondit.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2012 november 24, 23:06
Írta: Szalai György Dátum 2012 november 24, 23:06
Mágneseztem pelyhedző állú siheder koromban, az EVIG próbatermében, kísérlet keppen, tachométer generátor mágnest. Vagy inkább csak ott voltam, kiszolgáló villanyszerelő munkát végezni, mert az adatokat a mérnök csoport számolta logarléccel. Nem volt számítógép, zsebszámológép sem, a nagyáramú nagyfeszültségű kondenzátor is csak a COCOM listán volt. A tirisztor szót ott nem is ismerték. Volt vastag tekercselő huzal, elektromos targonca gazdagon, volt nagy zárlati áram, és nagy olvadó biztosító ami megszakította a zárlatot.
Köze nem volt ahhoz, amit a #3529-ben leírtam.
Több kondit sorba kötve rontunk az ESR-en, de emelhetünk a feszültségen.
Ekkora elco nem mindenhol terem, kellően nagy áramot elviselő fajtában meg hatványozottan nem, de az EPCOS azért készít. Sajnos iparszerű puffogtatásra a csavaros terminálok tűrőképessége sem megfelelő, ezért kisebb kapacitású kondenzátorokból kell blokkot képezni, megfelelő keresztmetszetű sínekkel és megfelelő topológiával. Így az ESR-en is javítunk.
De a profik azok profi impulzus kondenzátorokat használnak. Fémezett polipropilén SFMFO kondenzátort gyártanak a világban 6000VAC 5000uF méretben is.
Köze nem volt ahhoz, amit a #3529-ben leírtam.
Több kondit sorba kötve rontunk az ESR-en, de emelhetünk a feszültségen.
Ekkora elco nem mindenhol terem, kellően nagy áramot elviselő fajtában meg hatványozottan nem, de az EPCOS azért készít. Sajnos iparszerű puffogtatásra a csavaros terminálok tűrőképessége sem megfelelő, ezért kisebb kapacitású kondenzátorokból kell blokkot képezni, megfelelő keresztmetszetű sínekkel és megfelelő topológiával. Így az ESR-en is javítunk.
De a profik azok profi impulzus kondenzátorokat használnak. Fémezett polipropilén SFMFO kondenzátort gyártanak a világban 6000VAC 5000uF méretben is.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2012 november 24, 23:19
Írta: Szalai György Dátum 2012 november 24, 23:19
Itt találtam egy darab transzformátor lemez szalagot bagóért.
Ha kell, lehet belőle szükség szerinti átmérőjű, kis falvastagságú és nagy mágneses vezetőképességű ideiglenes hüvelyt sodorni, motorjavítgatáshoz.
Ha kell, lehet belőle szükség szerinti átmérőjű, kis falvastagságú és nagy mágneses vezetőképességű ideiglenes hüvelyt sodorni, motorjavítgatáshoz.
Cím: Re:Léptetőmotor
Írta: Bencze András Dátum 2012 november 24, 23:43
Írta: Bencze András Dátum 2012 november 24, 23:43
Valaha volt 1 komplett mágnesező gépkönyvem kapcsolási rajzzal. Az új mágnesezőhöz már nem adtak kapcsolási rajzot. Utánanézek és közzéteszem, ha van érdeklődés.
Cím: Re:Léptetőmotor
Írta: Bencze András Dátum 2012 november 24, 23:46
Írta: Bencze András Dátum 2012 november 24, 23:46
Az új tirisztorának és diódájának típusa N600CH16 (SCR) SW16CX805 (diode). Azt hiszem Westcode gyártmány.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2012 november 25, 00:25
Írta: Szalai György Dátum 2012 november 25, 00:25
N600CH16 (SCR)1600V, 1800A
Nem is értékeltem annyira felül a helyzetet a 2000A-ral.
Itt kínáltam hasonlóakat, de nem kellettek senkinek.
Nem is értékeltem annyira felül a helyzetet a 2000A-ral.
Itt kínáltam hasonlóakat, de nem kellettek senkinek.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 25, 05:03
Írta: ANTAL GÁBOR Dátum 2012 november 25, 05:03
Gyuri !
még öt perc és írom a magánlevelet . Egy tárcsatirisztort addig is lekötök .
még öt perc és írom a magánlevelet . Egy tárcsatirisztort addig is lekötök .
Cím: Re:Léptetőmotor
Írta: Messer Dátum 2012 november 25, 09:13
Írta: Messer Dátum 2012 november 25, 09:13
Persze, hogy van érdeklődés. :)
Az eddigiekért is Mindenkinek köszönet. [#worship]
Az eddigiekért is Mindenkinek köszönet. [#worship]
Cím: Re:Léptetőmotor
Írta: Bencze András Dátum 2012 november 25, 09:25
Írta: Bencze András Dátum 2012 november 25, 09:25
Megvan, lefényképezem és akinek kell elküldöm magánban. Itt a kapcsoló ignitron nevű cső, de a gyújtása is hasonló mint a tirisztoré.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 november 25, 10:37
Írta: 000000000 Dátum 2012 november 25, 10:37
Üdv!
Nekem elküldheted!
Nekem elküldheted!
Cím: Re:Léptetőmotor
Írta: mex Dátum 2012 november 25, 11:30
Írta: mex Dátum 2012 november 25, 11:30
A rajzon látható állórész tekercselése nem fog átütni a delejezés közben?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 25, 12:03
Írta: svejk Dátum 2012 november 25, 12:03
"ignitron"
Ez az!!!!
Ezt mondta a muki hogy ez van az övékében is amikor voltam a Bosmagnet kft-nél neodínium mágneseket venni.
Ilyen készülékkel mágnesezte fel előttem a Videoton tárcsamotorokat. Azt mondta ezek a csövek nagyobb árammeredekséget tudnak mint a tirisztorok. (gondolom a kommerszekre gondolt)
Ez az!!!!
Ezt mondta a muki hogy ez van az övékében is amikor voltam a Bosmagnet kft-nél neodínium mágneseket venni.
Ilyen készülékkel mágnesezte fel előttem a Videoton tárcsamotorokat. Azt mondta ezek a csövek nagyobb árammeredekséget tudnak mint a tirisztorok. (gondolom a kommerszekre gondolt)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 25, 12:08
Írta: svejk Dátum 2012 november 25, 12:08
Ez még nagy kérdés....
A tárcsamotoroknál ha nincs benne a szénkefe nincs gond, mert a forgórészen a menetszám csak 1-2 menet.
Léptetőnél viszont nagy a menetszám a gerjesztőtekercshez képest, de mivel ki van húzva az állórészből, így nem arra záródnak az erővonalak.
A tárcsamotoroknál ha nincs benne a szénkefe nincs gond, mert a forgórészen a menetszám csak 1-2 menet.
Léptetőnél viszont nagy a menetszám a gerjesztőtekercshez képest, de mivel ki van húzva az állórészből, így nem arra záródnak az erővonalak.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 25, 12:25
Írta: svejk Dátum 2012 november 25, 12:25
Talán a találmányodat úgy próbálnám ki, hogy a felmágnesező tekercset közvetlen a forgórész köré raknám.
Ebben az esetben a szórási veszteség csökkenne, mely bizonyára elég nagy lehet.
Az a baj hogy már az összes HPIII-as Laserjet nyomtató motoromat kidobtam, pedig az jó alany lenne a kísérletezésre.
Mondjuk igazából csak elméleti síkon érdekel a dolog.
Ebben az esetben a szórási veszteség csökkenne, mely bizonyára elég nagy lehet.
Az a baj hogy már az összes HPIII-as Laserjet nyomtató motoromat kidobtam, pedig az jó alany lenne a kísérletezésre.
Mondjuk igazából csak elméleti síkon érdekel a dolog.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 november 25, 13:03
Írta: besirkyjh Dátum 2012 november 25, 13:03
Sziasztok .
Tul nagy kihivást én sem érzek rá de van egy szekrényre valo ( régi , uj , vegyesen ) léptetöm amiböl kisérletezésre feltudok "áldozni " pár darabot .Ha lenne olyan modszer hogy akár a léptetö szétszedése nélkül is lehetne "delejezni" ( jól írom ? ) akkor kiprobálom szivesen .
Tul nagy kihivást én sem érzek rá de van egy szekrényre valo ( régi , uj , vegyesen ) léptetöm amiböl kisérletezésre feltudok "áldozni " pár darabot .Ha lenne olyan modszer hogy akár a léptetö szétszedése nélkül is lehetne "delejezni" ( jól írom ? ) akkor kiprobálom szivesen .
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2012 november 25, 14:15
Írta: Szalai György Dátum 2012 november 25, 14:15
„akár a léptetö szétszedése nélkül is”
Akát sok kilométer távolságból is lehet, még embereket gyógyítani is. Nyisd ki az ablakot, mert küldöm az energiát. [#vigyor2]
Akát sok kilométer távolságból is lehet, még embereket gyógyítani is. Nyisd ki az ablakot, mert küldöm az energiát. [#vigyor2]
Cím: Re:Léptetőmotor
Írta: sanyi84 Dátum 2012 november 25, 14:48
Írta: sanyi84 Dátum 2012 november 25, 14:48
Google fordítóval fordítottam. Szóval már szétszedés is árt ? Azaz még nincs kivéve a forgórész?
Jól értettem? Amúgy már szedtem szét átkötés célból és nem érzem gyengébbnek. No de akkor pontosan mi is a helyzet? Kiszeded tönkremegy eddig értem, szétszeded kimegy a központból tönkremegy ? Azt is értem nem épp tengelyvonalba fog visszakerülni a motor forgórész.
Jól értettem? Amúgy már szedtem szét átkötés célból és nem érzem gyengébbnek. No de akkor pontosan mi is a helyzet? Kiszeded tönkremegy eddig értem, szétszeded kimegy a központból tönkremegy ? Azt is értem nem épp tengelyvonalba fog visszakerülni a motor forgórész.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 25, 15:32
Írta: svejk Dátum 2012 november 25, 15:32
Szerintem semmit nem értesz. :(
Egyetlen egy szabály van:
Ha régi fajta (AlNiCo mágnessel szerelt) a motorod, akkor a forgórészt nem szabad kitolni még 5 mm-re sem az eredeti helyzetéből, mert elveszti a mágnes az erőssége több mint 50%-át.
Punktum.
Ezt a szabályt ki-ki a saját szája íze szerint ragozhatja, egy a lényeg a fenti állításnak logikailag megfeleljen.
Egyetlen egy szabály van:
Ha régi fajta (AlNiCo mágnessel szerelt) a motorod, akkor a forgórészt nem szabad kitolni még 5 mm-re sem az eredeti helyzetéből, mert elveszti a mágnes az erőssége több mint 50%-át.
Punktum.
Ezt a szabályt ki-ki a saját szája íze szerint ragozhatja, egy a lényeg a fenti állításnak logikailag megfeleljen.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 25, 19:45
Írta: ANTAL GÁBOR Dátum 2012 november 25, 19:45
Viszont ha a forgórész köré tekered a mágnesező tekercset akkor hogy tolod fel az állórészt? Elöször oldalra tolod a tekercset ( ahhoz hely kell) ami megint növeli az erővonalhosszat a vasban ami majd szórást fog okozni.
Vagy a lötyögős tekercs rácsúsztatható a (gyűrű ) alakú vastestre?
Vagy a lötyögős tekercs rácsúsztatható a (gyűrű ) alakú vastestre?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 25, 19:53
Írta: svejk Dátum 2012 november 25, 19:53
Van benne valami amit írsz!
Mitudomén? :)
De akár flexibilis kábelből is fel, -illetve betolás előtt le- lehet tekerni a járomra azt a pár menetet ami a felmágnesezéshez kell.
Mitudomén? :)
De akár flexibilis kábelből is fel, -illetve betolás előtt le- lehet tekerni a járomra azt a pár menetet ami a felmágnesezéshez kell.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 25, 19:59
Írta: ANTAL GÁBOR Dátum 2012 november 25, 19:59
A fel és letekerés nekem is megfordult a fejemben de valahogy olyan barkácsnak gondoltam ( ment egy magánlevél is az üggyel kapcsolatos másik ötletemről )
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 25, 20:15
Írta: svejk Dátum 2012 november 25, 20:15
Megkerestem a delejezős képeimet. Vannak itt videók is, bár nagyon gyatra minőségben.
Nem kell ennek olyan nagy feneket keríteni, főleg ha csak kísérletezik az ember.


Nem kell ennek olyan nagy feneket keríteni, főleg ha csak kísérletezik az ember.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 november 25, 22:03
Írta: besirkyjh Dátum 2012 november 25, 22:03
Áááá le vagy maradva :)
Küldök én Neked monitoron keresztül pont a közepére :))
( azt küldtem hogy menj és igyál egy felest a forum egészségére :)) ).
Be jött ?
Küldök én Neked monitoron keresztül pont a közepére :))
( azt küldtem hogy menj és igyál egy felest a forum egészségére :)) ).
Be jött ?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 november 25, 22:05
Írta: besirkyjh Dátum 2012 november 25, 22:05
Szia
Azt hittem nekem van kondim meg tirisztorom ehhez :(
Összeszámolom hogy álok ezekböl !
A tirisztor létfontosságu ?
Azt hittem nekem van kondim meg tirisztorom ehhez :(
Összeszámolom hogy álok ezekböl !
A tirisztor létfontosságu ?
Cím: Re:Léptetőmotor
Írta: zotykó Dátum 2012 november 25, 23:16
Írta: zotykó Dátum 2012 november 25, 23:16
Hello
A mágnesező áram és a kondenzátorok ESR értékére milyen hatással van delejezésre? Tehát kell nagyobb teljesítmény a nagyobb mágnesezéshez? Mi lesz ha túl erősen mágnesezek?
A mágnesező áram és a kondenzátorok ESR értékére milyen hatással van delejezésre? Tehát kell nagyobb teljesítmény a nagyobb mágnesezéshez? Mi lesz ha túl erősen mágnesezek?
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 26, 05:47
Írta: ANTAL GÁBOR Dátum 2012 november 26, 05:47
Tehermentesítem Svejket
A ESR hozzáadódik a tekercs ellenállásához és ezáltal csökken a beütő áram ( nagy esr nél nem kapsz mágnest ) A nevében is benne van equivalent series resistance
Semmi baj nem származik ha túl mágnesezel
A ESR hozzáadódik a tekercs ellenállásához és ezáltal csökken a beütő áram ( nagy esr nél nem kapsz mágnest ) A nevében is benne van equivalent series resistance
Semmi baj nem származik ha túl mágnesezel
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2012 november 26, 06:45
Írta: Szalai György Dátum 2012 november 26, 06:45
Igen! Annyira jól csinálod, hogy már délután ittam.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2012 november 26, 09:10
Írta: Szalai György Dátum 2012 november 26, 09:10
Azért egy rendes 400V 1000uF kondenzátor ESR értéke bőven 0,1 Ohm alatti.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2012 november 26, 09:16
Írta: Szalai György Dátum 2012 november 26, 09:16
„Mi lesz ha túl erősen mágnesezek?”
Először semmi. Ha még erősebben, akkor széttörik a mágnes.
Ha a tekercs meneteit nem bandázsoltad erősen egymáshoz, akkor szétnyitja őket a köztük ható taszító erő.
Először semmi. Ha még erősebben, akkor széttörik a mágnes.
Ha a tekercs meneteit nem bandázsoltad erősen egymáshoz, akkor szétnyitja őket a köztük ható taszító erő.
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2012 november 26, 11:41
Írta: Rabb Ferenc Dátum 2012 november 26, 11:41
Taszító erő? Az mitől keletkezik egy árammal átjárt tekercsben [#nemtudom]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 november 26, 11:54
Írta: 000000000 Dátum 2012 november 26, 11:54
Például attól, hogy az egymás melletti meneteknek azonos az áram iránya és a kialakuló mágneses tér iránya is azonos lesz.
Vagyis az egymás melletti menetek közt VONZÓ erő fog fellépni. Vagyis nem taszítani fogják egymást.
Vagyis az egymás melletti menetek közt VONZÓ erő fog fellépni. Vagyis nem taszítani fogják egymást.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2012 november 26, 13:25
Írta: Szalai György Dátum 2012 november 26, 13:25
Hogy kedvenc klasszikusomat idézzem a #3562-ből: „Mitudomén? :)”
Ebben olvastam valamit a 6.1 General (3) bekezdésben, de értelmezhettem rosszul is.
Ebben olvastam valamit a 6.1 General (3) bekezdésben, de értelmezhettem rosszul is.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 november 26, 13:45
Írta: keri Dátum 2012 november 26, 13:45
"Ezután Ampère rájött hogyha az áram járta vezető hat a mágnestűre, akkor két áram járta vezetőnek mágnesként kell egymásra hatnia. Egy sor zseniális kísérlet után bebizonyította hogy két azonos feszültségvektorú (párhuzamosak és egyirányúak) vezető vonzza egymást. Ha a feszültségvektorok párhuzamosak de ellentétes irányúak, akkor a két vezeték taszítja egymást. Azt is felfedezte hogy az erő nagysága fordítottan arányos a távolság négyzetével."
A tekercs meneteit a forgó gépekben a centripetális erő ellen kell rögzíteni leginkább. Álló gépeknél a váltakozó áram okozta rezgés ami kikezdi a vezetékeket, ezért impregnálják a jobb trafókat, és ezért nem búgnak. Léptető motoroknál előbb leég a szigetelőzománc mint hogy kárt tenne a mágneses mező erőssége a motorban.
A tekercs meneteit a forgó gépekben a centripetális erő ellen kell rögzíteni leginkább. Álló gépeknél a váltakozó áram okozta rezgés ami kikezdi a vezetékeket, ezért impregnálják a jobb trafókat, és ezért nem búgnak. Léptető motoroknál előbb leég a szigetelőzománc mint hogy kárt tenne a mágneses mező erőssége a motorban.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 november 26, 13:46
Írta: keri Dátum 2012 november 26, 13:46
Persze ezt nem Andrásnak írtam mert ő is jól írta le.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 november 26, 14:12
Írta: s7manbs8 Dátum 2012 november 26, 14:12
Kár hogy manapság már nincs mit lassan felfedezni, főleg otthon a konyhaasztalon ...
Cím: Re:Léptetőmotor
Írta: B.Tibor Dátum 2012 november 26, 14:28
Írta: B.Tibor Dátum 2012 november 26, 14:28
Itt egy link a mágnes készítésről
Biztosan sokan ismeritek (az összetevőkből mintha AlNiCo mágnes lenne, de én ezt nem tudom megítélni pontosan). Nem stimmel az sem, hogy felmágnesezés után leveszi a mágnest, és nyitott lesz a mágneses tér. (De lehet, hogy a helyén még beütik a teljes erősségűre)
Az "előmágnesezés" 3:50-nél, valami 6000A 3V, a végleges mágnesezés 4:20-nál, 300V 28A mutat a műszer, ha jól olvasom le. És mintha nem impulzusszerűen mágnesezné, hanem 1-2 másodpercig tartja nyomva a gombot a készüléken, és a műszerek is folyamatosan mutatják az értéket. Persze a valóságban ha ugyanez az áram folyik át a tekercsen, akkor viszont jóval több menet kell pár menetnél.
Biztosan sokan ismeritek (az összetevőkből mintha AlNiCo mágnes lenne, de én ezt nem tudom megítélni pontosan). Nem stimmel az sem, hogy felmágnesezés után leveszi a mágnest, és nyitott lesz a mágneses tér. (De lehet, hogy a helyén még beütik a teljes erősségűre)
Az "előmágnesezés" 3:50-nél, valami 6000A 3V, a végleges mágnesezés 4:20-nál, 300V 28A mutat a műszer, ha jól olvasom le. És mintha nem impulzusszerűen mágnesezné, hanem 1-2 másodpercig tartja nyomva a gombot a készüléken, és a műszerek is folyamatosan mutatják az értéket. Persze a valóságban ha ugyanez az áram folyik át a tekercsen, akkor viszont jóval több menet kell pár menetnél.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 26, 14:49
Írta: svejk Dátum 2012 november 26, 14:49
Antal Gábor is a statikus mágnesezést sulykolja már napok óta belém, de én nem adom be a derekam, nekem egyszerűbb, szimpatikusabb a nagy energiájú impulzusos megoldás.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2012 november 26, 15:39
Írta: Szalai György Dátum 2012 november 26, 15:39
Telt az idő, a bátrabbak elkezdték nagy energiájú impulzus üzemben alkalmazni a hitvány rézdrót tekercseiket és rá kellett jöjjenek, hogy a radiális Lorenz erő képes szétszakítani a vezetéket, ha nem rögzítik megfelelően. Akkor a legokosabbnak eszébe jutott, hogy egy vastag falú csőbőre, vékony, spirál alakú nyílást szikraforgácsol, és a nyílást szigetelő anyaggal tölti ki, így létre jött a Helix tekercs. Ez sem volt elég, még erősebb tekercs kellett. Akkor jött Dr. Francis Bitter és feltalálta nekik a jelenleg ismert, legnagyobb radiális Lorenz erőt is elviselő tekercs konstrukciót, ami már nem is tekercs, nagyon mesze van a léptetőmotortól, és nem is érdekli a Hobbyistákat. [#wink]
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2012 november 26, 15:51
Írta: Szalai György Dátum 2012 november 26, 15:51
A vesztett erejű léptető forgórészek újra mágnesezéséről volt itt szó.
Muszáj az újramágnesezéstől egészen a beépített állapotig fenntartani a zárt mágnes kört. Az nélkül hiába delejezed, újra csak csökken az ereje, mire bekerül a helyére.
Még vasorrú bábát fogni is gyenge lesz megint.
Muszáj az újramágnesezéstől egészen a beépített állapotig fenntartani a zárt mágnes kört. Az nélkül hiába delejezed, újra csak csökken az ereje, mire bekerül a helyére.
Még vasorrú bábát fogni is gyenge lesz megint.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 november 26, 16:01
Írta: besirkyjh Dátum 2012 november 26, 16:01
Erre gondoltam mikor irtam hogy "szétszedése nélkül" .
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 november 26, 16:04
Írta: besirkyjh Dátum 2012 november 26, 16:04
Áááá nem vagytok igazi amatörök :)
Na majd én ( de már csak holnap ) összekötöm az összes drotot két kivezetésre és adok neki .Legalább tudni fogom hogy kellett volna :)
Nem szolhat nagyobbat mint egy 10 000uf 63 voltos kondi forditott polaritással ( nem most volt , vagy 10 éve ) :)
Na majd én ( de már csak holnap ) összekötöm az összes drotot két kivezetésre és adok neki .Legalább tudni fogom hogy kellett volna :)
Nem szolhat nagyobbat mint egy 10 000uf 63 voltos kondi forditott polaritással ( nem most volt , vagy 10 éve ) :)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 26, 16:21
Írta: svejk Dátum 2012 november 26, 16:21
Ezt miért nekem írod, hogy nem szabad megszakítani a mágneskört, amikor már évek óta emlegetem a lemágneseződést?
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2012 november 26, 18:33
Írta: Szalai György Dátum 2012 november 26, 18:33
Mert a B.Tibor által mutatott linken a #3578-ban felmágnesezés után nyílik a mágneskör és nyitva is marad a kész mágnes beépítéséig. Az tehát vagy más mágnes anyag, vagy nem kell, hogy annyira erős legyen, mint a léptetőmotor forgórészében lévő.
Te pedig arra a bejegyzésre azt reagáltad, a #3579-ben hogy neked „egyszerűbb, szimpatikusabb a nagy energiájú impulzusos megoldás.” De nem hangsúlyoztad a végig zárt mágneskör fontosságát.
Ezért írtam, a #3581-ben, hogy „Muszáj az újramágnesezéstől egészen a beépített állapotig fenntartani a zárt mágnes kört.” Mert az a célravezető megoldás, nem ami a #3578-ban lévő linken látható. Tudom, hogy tisztában vagy a végig zárt mágneskör fontosságával a léptető forgórész újramágnesezésekor, de nem tartottad fontosnak odaírni.
Valószínűleg arra sem mindenki figyelt, hogy a videóban, a készre mágnesezéskor (4:39) 24A 300V-on csattannak a mutatók, ami 7200W. Ha ezt a teljesítményt a Hobbyista otthon, egy fázisú konnektorból akarja kicsalni, akkor bajok lesznek, mert ahhoz 230V-on 31A kéne. Az háztartási konnektorból nem megy következmények nélkül. És akkor ott még csak egy gyengébb mágnes készült. Ezért jobb Hobbyra a csak pár amperrel kondenzátort töltős, mégis nagy energiát adó impulzus üzem.
Te pedig arra a bejegyzésre azt reagáltad, a #3579-ben hogy neked „egyszerűbb, szimpatikusabb a nagy energiájú impulzusos megoldás.” De nem hangsúlyoztad a végig zárt mágneskör fontosságát.
Ezért írtam, a #3581-ben, hogy „Muszáj az újramágnesezéstől egészen a beépített állapotig fenntartani a zárt mágnes kört.” Mert az a célravezető megoldás, nem ami a #3578-ban lévő linken látható. Tudom, hogy tisztában vagy a végig zárt mágneskör fontosságával a léptető forgórész újramágnesezésekor, de nem tartottad fontosnak odaírni.
Valószínűleg arra sem mindenki figyelt, hogy a videóban, a készre mágnesezéskor (4:39) 24A 300V-on csattannak a mutatók, ami 7200W. Ha ezt a teljesítményt a Hobbyista otthon, egy fázisú konnektorból akarja kicsalni, akkor bajok lesznek, mert ahhoz 230V-on 31A kéne. Az háztartási konnektorból nem megy következmények nélkül. És akkor ott még csak egy gyengébb mágnes készült. Ezért jobb Hobbyra a csak pár amperrel kondenzátort töltős, mégis nagy energiát adó impulzus üzem.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 november 26, 18:48
Írta: keri Dátum 2012 november 26, 18:48
Mutass már nekem egy ilyen léptető motort, amiben szétszakadt a tekercs, mert érdekelne.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2012 november 26, 18:58
Írta: Szalai György Dátum 2012 november 26, 18:58
Olyat nem tudok mutatni neked és nem is arról irtam.
Te a léptetőmotor tekercsére vagy kíváncsi, én meg az impulzus üzemű felmágnesező készülék tekercséről beszélek.
Radiális Lorenz erő tekintetében agyon nagy különbség van a kettő között.
Te a léptetőmotor tekercsére vagy kíváncsi, én meg az impulzus üzemű felmágnesező készülék tekercséről beszélek.
Radiális Lorenz erő tekintetében agyon nagy különbség van a kettő között.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 november 26, 19:04
Írta: ANTAL GÁBOR Dátum 2012 november 26, 19:04
De arra a gépre szerintem 6-8 mágnest is fel lehetne tenni mágnesezési célból Nézd meg hogy milyen hosszú a két vasgyám közötti szakasz. Az egy univerzális mágnesező Amtőr gyakorlatban ha csak a hatodrészével számolom akkor csak 1.2 kW
( amit meg fogok csinálni az 650 Watt os lesz )
( amit meg fogok csinálni az 650 Watt os lesz )
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 november 26, 19:13
Írta: keri Dátum 2012 november 26, 19:13
Ja, ok, így érthető. Energetikában már láttam masszív rézgerendát meggörbülni.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2012 november 26, 19:29
Írta: Szalai György Dátum 2012 november 26, 19:29
Igen, arra a gépre több mágnes is felfér, de akkor a gép fluxusa a több mágnes között oszlik meg, vagyis akkor csak tört résznyi teljesítmény jut egy mágnesre.
Mert most azon az egy mágnes vason keresztül záródik a gép által megtermelt összes erővonala.
(Legalább is a vas telítődéséig, utána a többi erővonalnak meg már csak a levegőben marad hely.)
Most megyek, kicsit kisimítom az idegeimet.
Mert most azon az egy mágnes vason keresztül záródik a gép által megtermelt összes erővonala.
(Legalább is a vas telítődéséig, utána a többi erővonalnak meg már csak a levegőben marad hely.)
Most megyek, kicsit kisimítom az idegeimet.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 november 26, 19:33
Írta: 000000000 Dátum 2012 november 26, 19:33
Egy masszív zárlat le is tépi a sínt a tartójáról, ha az nincs normálisan méretezve.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2012 november 26, 20:04
Írta: Szalai György Dátum 2012 november 26, 20:04
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2012 november 26, 20:16
Írta: PSoft Dátum 2012 november 26, 20:16
Te,még ismerted az EVIG-es,U-típusú öntöttvas szekrénycsaládot.
Porrá törtek a porcelán,papírbetétes síntávtartók a 30x10-es sínek "szorításától",egy a felső szekrényből beejtett,és ottfelejtett:((( villáskulcs okozta sínzárlatnál.
Porrá törtek a porcelán,papírbetétes síntávtartók a 30x10-es sínek "szorításától",egy a felső szekrényből beejtett,és ottfelejtett:((( villáskulcs okozta sínzárlatnál.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 november 26, 20:29
Írta: 000000000 Dátum 2012 november 26, 20:29
Én egyszer találkoztam hasonló sínszekrényben ottfelejtett 22-24-es villáskulccsal a sineken.
A sinek festve voltak és nem kezdték ki a kulcsot!
Éves karbantartáskor találtuk. (MOL)
Kicsit meglepődtünk, mert villany alatt volt a szekrény és úgy szedtük le a fedelet, hogy csak belenézzünk.
Előtte 315A.
A sinek festve voltak és nem kezdték ki a kulcsot!
Éves karbantartáskor találtuk. (MOL)
Kicsit meglepődtünk, mert villany alatt volt a szekrény és úgy szedtük le a fedelet, hogy csak belenézzünk.
Előtte 315A.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2012 november 26, 20:35
Írta: Szalai György Dátum 2012 november 26, 20:35
Semleges csevegő, vegyes ügyek #26045
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 november 26, 21:12
Írta: svejk Dátum 2012 november 26, 21:12
Ühüm, ja, lehet.
Szóval nekem a felmágnesezés egyszerűbbnek tűnik bazi nagy impulzussal mint a statikus mód, mint amit B.Tibor linkelt, illetve Antal Gábor erőlteti. (nem pejoratív)
Többek közt az általad leírt indokok miatt.
Szóval nekem a felmágnesezés egyszerűbbnek tűnik bazi nagy impulzussal mint a statikus mód, mint amit B.Tibor linkelt, illetve Antal Gábor erőlteti. (nem pejoratív)
Többek közt az általad leírt indokok miatt.
Cím: Re:Léptetőmotor
Írta: Etib Dátum 2012 december 04, 13:35
Írta: Etib Dátum 2012 december 04, 13:35
Érdeklődnék, hogy léptetőmotorhoz a szükséges táp teljesítményét egyszerűen a fázisáram * feszültség alapján tervezitek?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 december 04, 14:29
Írta: s7manbs8 Dátum 2012 december 04, 14:29
Az úgy nem teljesen fedi a valóságot, mert ha csak nagyon lassan mozgatod addig elég neki annyi áram, teljesítmény, de ha gyorsan forgatod, akkor több kell neki, hogy pontosan mennyi az a vezérlőtől is függhet, mert akár vissza is lehet termelni az eldisszipálás helyett is szerintem, ha valaki nagyon ügyes vezérlést csinálna.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 december 04, 15:17
Írta: besirkyjh Dátum 2012 december 04, 15:17
Szia
At esetek 99%-ban a vezérlöre kapcsolhato max feszültség dönti el .A vezérlök tudják a dolgukat !Ha saját épitésü a vezérlö akkor a kapcsolás szerinti feszültséget kel figyelembe venni .Feszültség választásnál még segitség lehet hogy a léptetö ( nagyon lassu moszgásnál pl 100mm/min ) hömérséklete ne haladja meg az 50 fokot kb !
Milyen a vezérlöd ?
At esetek 99%-ban a vezérlöre kapcsolhato max feszültség dönti el .A vezérlök tudják a dolgukat !Ha saját épitésü a vezérlö akkor a kapcsolás szerinti feszültséget kel figyelembe venni .Feszültség választásnál még segitség lehet hogy a léptetö ( nagyon lassu moszgásnál pl 100mm/min ) hömérséklete ne haladja meg az 50 fokot kb !
Milyen a vezérlöd ?
Cím: Re:Léptetőmotor
Írta: Etib Dátum 2012 december 04, 17:19
Írta: Etib Dátum 2012 december 04, 17:19
Szia!
A vezérlők MDSS-80 8.2 és 5.6 -osak (lesznek). A motorok egy 9A, 2 db 6A és egy db 4,3 A / fázisos motorok. Mindegyik hajtható 60-70V-al. Most akarnám megépíteni a tápot és dilemmázok mekkora toroido(kat)t vegyek. Előre is köszi a segítséget.
A vezérlők MDSS-80 8.2 és 5.6 -osak (lesznek). A motorok egy 9A, 2 db 6A és egy db 4,3 A / fázisos motorok. Mindegyik hajtható 60-70V-al. Most akarnám megépíteni a tápot és dilemmázok mekkora toroido(kat)t vegyek. Előre is köszi a segítséget.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 december 05, 00:19
Írta: besirkyjh Dátum 2012 december 05, 00:19
Szia
5-600W toroid elég lesz szerintem böven és menj a 80volt DC környékéére és puffernek az amperenkénti 1000uf is jonak tünik .
Nekem a 9A-es léptetö gyanus (hány Nm , 12? )kevés lesz hozzá a 80 volt ( a max fordulatod kevés lesz ) olyan 130V körüli vezérlö kellene .
Probál a Klavionál a Tibor Györgyöt elérni vagy itt a forumon a topickjában a biztonság kedvéért kérdezz rá .
A közelmultban volt valami hasonloval dolgom és a 80 voltos táprol a 6.4Nm-es léptetö halomra verte a 12Nm-est , egyszerüen 200fordulat fölé nem ment illetve két újjal simán megfogtam ezen a fordulaton is .Kérdezd inkább , jobban jársz !
5-600W toroid elég lesz szerintem böven és menj a 80volt DC környékéére és puffernek az amperenkénti 1000uf is jonak tünik .
Nekem a 9A-es léptetö gyanus (hány Nm , 12? )kevés lesz hozzá a 80 volt ( a max fordulatod kevés lesz ) olyan 130V körüli vezérlö kellene .
Probál a Klavionál a Tibor Györgyöt elérni vagy itt a forumon a topickjában a biztonság kedvéért kérdezz rá .
A közelmultban volt valami hasonloval dolgom és a 80 voltos táprol a 6.4Nm-es léptetö halomra verte a 12Nm-est , egyszerüen 200fordulat fölé nem ment illetve két újjal simán megfogtam ezen a fordulaton is .Kérdezd inkább , jobban jársz !
Cím: Re:Léptetőmotor
Írta: Etib Dátum 2012 december 05, 19:24
Írta: Etib Dátum 2012 december 05, 19:24
Szia!
Köszönöm az infókat.A 9A-os motor HN200 3451 0900 AST04-es . Jól tudtad, hogy nem 70V-os hanem 120V feszültséget igényel.
Pont erre a típusra sajnos még a MAE honlapján sem találtam infót a nyomatékára. Valahol 10Nm körül lehet.Nekem 30 V-on is elindult amikor teszteltem,igaz csak azt néztem, hogy rendben működik-e és nem terheltem. Olyan vezérlő ami 80V felett tud , sajnos aranyárban van a Klaviónál, meg akarom próbálni 80V-on terhelés mellett mit tud. ( a 9A-is aggasztó mert a legnagyobb vezélőjük is csak 8.2A-t tud). Az 500-600W-os toroidot motoronként gondoltad?
Kondiba 10000uF-osat vettem.
Köszönöm az infókat.A 9A-os motor HN200 3451 0900 AST04-es . Jól tudtad, hogy nem 70V-os hanem 120V feszültséget igényel.
Pont erre a típusra sajnos még a MAE honlapján sem találtam infót a nyomatékára. Valahol 10Nm körül lehet.Nekem 30 V-on is elindult amikor teszteltem,igaz csak azt néztem, hogy rendben működik-e és nem terheltem. Olyan vezérlő ami 80V felett tud , sajnos aranyárban van a Klaviónál, meg akarom próbálni 80V-on terhelés mellett mit tud. ( a 9A-is aggasztó mert a legnagyobb vezélőjük is csak 8.2A-t tud). Az 500-600W-os toroidot motoronként gondoltad?
Kondiba 10000uF-osat vettem.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 december 05, 19:59
Írta: besirkyjh Dátum 2012 december 05, 19:59
Igen ez várhato volt .Amivel kinlodtunk az egy kész verzio volt ( készre volt szerelve de valamiért nem találták jonak ) és azon a 80 voltos vezérlö csak 60 volt környékén kapott tápot ( sokszor hihetetlen hogy mireképes az a kis plussz feszültség ami hiányzott ) .A tápjuk birta pedig puffer fért volna az is egy 500W-os toroid volt .Lehet nagyobb ( vegyük az 500W-ot minimumnak ) de e fölött kel rá lágyindito az biztos .
A 9A hez szükön de elég lesz a 8.2A , lehet még egy garnitura puffer is !
A 9A hez szükön de elég lesz a 8.2A , lehet még egy garnitura puffer is !
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2012 december 09, 11:16
Írta: c2nsu773m Dátum 2012 december 09, 11:16
Lenne egy kérdésem!
Egy MSD vezérlő csak 50V ig működik utána letílt, nekem van egy egyenirányított toroidom ami 52-53V-ot ad le üresjáratban, mit lehet csinálni azzal a fránya 2-3 voltal?
Egy MSD vezérlő csak 50V ig működik utána letílt, nekem van egy egyenirányított toroidom ami 52-53V-ot ad le üresjáratban, mit lehet csinálni azzal a fránya 2-3 voltal?
Cím: Re:Léptetőmotor
Írta: motion Dátum 2012 december 09, 11:38
Írta: motion Dátum 2012 december 09, 11:38
Ha van rá lehetőséged, akkor tekerj rá a trafóra 4-5 menetet tekercselési iránnyal szembe. ...pl.
Cím: Re:Léptetőmotor
Írta: 2f428kduf Dátum 2012 december 09, 16:52
Írta: 2f428kduf Dátum 2012 december 09, 16:52
Tisztelt Uraim
A szekunder van legtöbbször kívül. Nem egyszerübb azt a néhány menetet le- tekerni, nem rá. A rézveszteség is kevesebb lesz. Rengeteggel.
A szekunder van legtöbbször kívül. Nem egyszerübb azt a néhány menetet le- tekerni, nem rá. A rézveszteség is kevesebb lesz. Rengeteggel.
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2012 december 09, 17:06
Írta: Rabb Ferenc Dátum 2012 december 09, 17:06
Ha szerinted egy gondosan lebandázsolt és vákuumimpregnált toroidot egyszerűbb sérülésmentesen meghámozni, letekerni belőle, újrabandázsolni - mint az egész tetejére rátekerni pár menet szigetelt "villanydrótot", nos akkor valóban egyszerűbb. Mindössze 5-10 menetnél többletnél miért is lesz olyan nagy a rézveszteség változása?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 december 10, 18:09
Írta: 000000000 Dátum 2012 december 10, 18:09
Sziasztok!
Még új vagyok a témában, de szeretnék én is egy cnc gépet építeni. A vezérlés már meg van: egy Arduino fogja vezérelni a motorokat hátom H-hídon keresztül, de nem nagyon tudom, hogy milyet vegyek. Nálam a pontosság fontosabb mint a gyorsaság, mivel nyákot szeretnék majd vele készíteni. Nem lesz olyan nagy a gép fél méternél bizos nem lesz nagyobb. Egy dremel fogja majd valószínűleg meghajtani a fejeket.
Ezt nézegettem, de nem vagyok benne biztos, hogy jó-e: https://www.sparkfun.com/products/10846
Lehet, hogy jobb lenne egy 12V-os...
Még új vagyok a témában, de szeretnék én is egy cnc gépet építeni. A vezérlés már meg van: egy Arduino fogja vezérelni a motorokat hátom H-hídon keresztül, de nem nagyon tudom, hogy milyet vegyek. Nálam a pontosság fontosabb mint a gyorsaság, mivel nyákot szeretnék majd vele készíteni. Nem lesz olyan nagy a gép fél méternél bizos nem lesz nagyobb. Egy dremel fogja majd valószínűleg meghajtani a fejeket.
Ezt nézegettem, de nem vagyok benne biztos, hogy jó-e: https://www.sparkfun.com/products/10846
Lehet, hogy jobb lenne egy 12V-os...
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2012 december 10, 18:17
Írta: c2nsu773m Dátum 2012 december 10, 18:17
És esetleg valami 48V-os stabilizátor nem létezik?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 december 10, 18:59
Írta: 000000000 Dátum 2012 december 10, 18:59
Egyszerűbb, ha a toroidot megheréled!
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2012 december 10, 19:04
Írta: c2nsu773m Dátum 2012 december 10, 19:04
De a közepe ki van öntve műgyantával....
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 december 10, 19:09
Írta: 000000000 Dátum 2012 december 10, 19:09
Az nem baj, a szekunderen megkeresed a végétől vissza azt a tekercs darabot, ahol megfelelő a feszültség és csinálsz egy leágazást forrasztással.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2012 december 10, 19:12
Írta: jv7pu3a5p Dátum 2012 december 10, 19:12
Néhány darab nagyobb áramú dióda a puffer kondi elé sorba.
Pl. ilyen: SFAF1608G (Lomexben néztem ki)
EZ egész jó árban van, 16A tud.
0.6-0.7 V esik egy diódán.
Nem a legszebb megoldás, de célravezető...
Pl. ilyen: SFAF1608G (Lomexben néztem ki)
EZ egész jó árban van, 16A tud.
0.6-0.7 V esik egy diódán.
Nem a legszebb megoldás, de célravezető...
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2012 december 10, 19:19
Írta: jv7pu3a5p Dátum 2012 december 10, 19:19
Milyen ARDUINO vezérlő az?
Igazából a pontosságot nem feltétlenül a vezérlőd fogja meghatározni, inkább a mechanikád. A legtöbb vezérlő tudja a mi hobby szintünkhöz elvárt pontosságot.
Először a géped tervezd meg és utána válassz hozzá motort.
Igazából a pontosságot nem feltétlenül a vezérlőd fogja meghatározni, inkább a mechanikád. A legtöbb vezérlő tudja a mi hobby szintünkhöz elvárt pontosságot.
Először a géped tervezd meg és utána válassz hozzá motort.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 december 10, 19:43
Írta: keri Dátum 2012 december 10, 19:43
A léptető motor nem olyan mint a szokásos DC motor. Azoknak olyan nagy a belső ellenállása, és ezáltal az indukciója, hogy a névleges feszültségen, névleges áram fog folyni. Viszont ezért nem túl hatékonyak és nem is túl dinamikusak.
Egy léptető motornál áramgenerátoros meghajtás kell. Azért csinálják szándékoson minél kisebbre a belső ellenállását, hogy gyorsabban elérje a névleges áramot. Eközben a feszültség akár 80-100V-ot is elérheti mert úgy még gyorsabb lesz.
Gyakorlatban ez azt jelenti, ha egy 3V-os motorra 3V-ot kapcsolsz akkor elég alacsony lesz a max fordulatszáma, de ugyan ez 30V-on már sokkal fürgébb. Persze az áramot korlátozni kell.
Ezt általánosan PWM modulációval és áram vissza csatolással oldják meg, de erre az arduinó nem vagy csak nagyon komplikáltan lesz képes és akkor is max 1 motornál egyszerre.
Régebbi megoldás az, hogy egy soros ellenállással korlátozzák le az áramot. Az eredmény szinte ugyan az, de nyilván az elektromos teljesítmény nagyobbik rész az ellenálláson fog elmelegedni. Ezért csak kicsi motoroknál használják. Ez nálad járható út, mivel te is kicsi motorokat akarsz használni és 12V-ról 3V-ra csökkenteni a feszültséget ellenállással még nem olyan drasztikus.
Egy léptető motornál áramgenerátoros meghajtás kell. Azért csinálják szándékoson minél kisebbre a belső ellenállását, hogy gyorsabban elérje a névleges áramot. Eközben a feszültség akár 80-100V-ot is elérheti mert úgy még gyorsabb lesz.
Gyakorlatban ez azt jelenti, ha egy 3V-os motorra 3V-ot kapcsolsz akkor elég alacsony lesz a max fordulatszáma, de ugyan ez 30V-on már sokkal fürgébb. Persze az áramot korlátozni kell.
Ezt általánosan PWM modulációval és áram vissza csatolással oldják meg, de erre az arduinó nem vagy csak nagyon komplikáltan lesz képes és akkor is max 1 motornál egyszerre.
Régebbi megoldás az, hogy egy soros ellenállással korlátozzák le az áramot. Az eredmény szinte ugyan az, de nyilván az elektromos teljesítmény nagyobbik rész az ellenálláson fog elmelegedni. Ezért csak kicsi motoroknál használják. Ez nálad járható út, mivel te is kicsi motorokat akarsz használni és 12V-ról 3V-ra csökkenteni a feszültséget ellenállással még nem olyan drasztikus.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 december 10, 19:49
Írta: 000000000 Dátum 2012 december 10, 19:49
Inkább ne írjál már semmit, ha csak ilyen műszaki butaságokra vagy képes.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 december 10, 19:53
Írta: s7manbs8 Dátum 2012 december 10, 19:53
Mi hibádzik az írásban ? Tanuljunk belőle.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 december 10, 19:57
Írta: ANTAL GÁBOR Dátum 2012 december 10, 19:57
A második és harmadik mondat
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 december 10, 20:05
Írta: s7manbs8 Dátum 2012 december 10, 20:05
Biztos, nem csak rossz szót használ és félreérthető ?
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 december 10, 20:35
Írta: keri Dátum 2012 december 10, 20:35
Na Tibor, itt a lehetőség, magyarázd el szegény tudatlan kezdőnek, ahelyett hogy gyalázkodsz már megint, az érdemi hozzászólás helyett.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 december 10, 20:49
Írta: keri Dátum 2012 december 10, 20:49
Műszakilag biztos nem volt szabatos a megfogalmazás, de azért jó pár elektronikához nem konyító autószerelő köszönheti nekem a kiváló vizsgaeredményeit...na meg azért arra is kíváncsi lennék Tibor hány saját fejlesztésű vezérlőt épített, mert én már csináltam párat ;-)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 december 10, 21:15
Írta: 000000000 Dátum 2012 december 10, 21:15
Tudod egy embernél két dolog (műszaki tudatlanság ÉS nagyképűség) együttállása nálam súlyos dolog, és utána az ilyen emberkék még általában be is sértődnek, és gyalázkodónak, kioktatónak merészelik nevezni azt, aki felhívta a figyelmét a téves állításaira egy műszaki Fórumon. ANTAL GÁBOR is gyalázott?
A te ilyen tudással épített vezérlőidet pedig lerosszom, de te se nagyon kapcsold be őket, ha van egy csepp kis önkritikád.
Ugyanis ekkor a marhaságokat ilyen töményen még életemben nem láttam:
"Azoknak olyan nagy a belső ellenállása, és ezáltal az indukciója, hogy a névleges feszültségen, névleges áram fog folyni. Viszont ezért nem túl hatékonyak és nem is túl dinamikusak."
A te ilyen tudással épített vezérlőidet pedig lerosszom, de te se nagyon kapcsold be őket, ha van egy csepp kis önkritikád.
Ugyanis ekkor a marhaságokat ilyen töményen még életemben nem láttam:
"Azoknak olyan nagy a belső ellenállása, és ezáltal az indukciója, hogy a névleges feszültségen, névleges áram fog folyni. Viszont ezért nem túl hatékonyak és nem is túl dinamikusak."
Cím: Re:Léptetőmotor
Írta: zotykó Dátum 2012 december 10, 21:17
Írta: zotykó Dátum 2012 december 10, 21:17
Akkor ne haragudj, de ilyen háttérrel elvárható lenne sőt kötelező a szabatos műszaki megfogalmazás.
Ne lehessen félre érteni. A műszaki világban ez nagyon fontos.
Ne lehessen félre érteni. A műszaki világban ez nagyon fontos.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 december 10, 21:23
Írta: svejk Dátum 2012 december 10, 21:23
Ejnye basszus Keri, abból a két mondatból máshogy kellett volna kimásznod![#ejnye1]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 december 10, 21:50
Írta: 000000000 Dátum 2012 december 10, 21:50
Sajnálom, hogy sikerült egy ilyen kis vitatkozást elindítanom.
Elég sokat olvasgattam, az egész hétvégét rá szántam és sok helyen is írták, hogy a mechanikát kell jól megépíteni. Lassan nekiállok megtervezni SketchUp-ban és akkor linkelek be képeket is.
Viszont sokan is használnak Arduinot, mert állítólag jobb is, mint a roros portos megoldás. Lehet egyszerre több motort is vezérelni, itt egy videó, ahol lehet látni, hogy elég pontosan kivágott vele egy nyákot: http://www.youtube.com/watch?v=SzFpiU6OSTQ
Valami hasonló lesz felépítésben, bár én leginkább fát fogok használni. Ehhez jobban fog hasonlítani, bár a sínek máshogy lesznek megoldva és egy kicsit kisebb lesz: http://buildyourcnc.com/MarkKsCNCMachine.aspx
Akkor először megépítem és utána rendelem meg hozzá az elektronikát.
Elég sokat olvasgattam, az egész hétvégét rá szántam és sok helyen is írták, hogy a mechanikát kell jól megépíteni. Lassan nekiállok megtervezni SketchUp-ban és akkor linkelek be képeket is.
Viszont sokan is használnak Arduinot, mert állítólag jobb is, mint a roros portos megoldás. Lehet egyszerre több motort is vezérelni, itt egy videó, ahol lehet látni, hogy elég pontosan kivágott vele egy nyákot: http://www.youtube.com/watch?v=SzFpiU6OSTQ
Valami hasonló lesz felépítésben, bár én leginkább fát fogok használni. Ehhez jobban fog hasonlítani, bár a sínek máshogy lesznek megoldva és egy kicsit kisebb lesz: http://buildyourcnc.com/MarkKsCNCMachine.aspx
Akkor először megépítem és utána rendelem meg hozzá az elektronikát.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 december 10, 21:59
Írta: besirkyjh Dátum 2012 december 10, 21:59
Szia
Valami félértésröl lesz szo vangy info hiányrol :)
Mi sem használunk a vezérlöinkhez soros portot , ott az LPT vagy az USB .
Gyüjts még infokat mig épited a mechanikát .
Kérdezz segitünk .
Valami félértésröl lesz szo vangy info hiányrol :)
Mi sem használunk a vezérlöinkhez soros portot , ott az LPT vagy az USB .
Gyüjts még infokat mig épited a mechanikát .
Kérdezz segitünk .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 december 10, 22:53
Írta: 000000000 Dátum 2012 december 10, 22:53
Ha nagy a belső ellenállása és az indukciója, akkor mitől tud felvenni pl 12V-on 20A-t?
Az pl csak 0,6ohm.
Ez mihez képest nagy?
Az pl csak 0,6ohm.
Ez mihez képest nagy?
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 december 11, 07:08
Írta: keri Dátum 2012 december 11, 07:08
Te komolyan ennyire autista vagy hogy nem érted?
Antal Gábor veled ellentétben SOHA nem gyalázkodik.
Elmondja hogy helyes megoldást kutúráltan, és ha visszalapozol, én mindig meg is köszönöm neki.
Szóval tanulj tőle emberi viselkedést!
Ezen kívül légy szíves idézd be hol gyalázkodtam.
Antal Gábor veled ellentétben SOHA nem gyalázkodik.
Elmondja hogy helyes megoldást kutúráltan, és ha visszalapozol, én mindig meg is köszönöm neki.
Szóval tanulj tőle emberi viselkedést!
Ezen kívül légy szíves idézd be hol gyalázkodtam.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 december 11, 07:22
Írta: keri Dátum 2012 december 11, 07:22
Először is nem neked írtam, és nem is szakembernek, mert akkor nem kellene magyaráznom.
Az elvet próbáltam MEGÉRTETNI egy laikusnak tűnő emberrel, mert én hiszem, hogy aki akar, bármit képes megérteni.
Éppen EZÉRT nyílván van benne ellentmondás, pontatlanság, hülyeség, de ez egy BESZÉLGETÉS, vagyis interaktív, a kérdező visszakérdez, én megvilágítom neki más irányból, más magyarázattal, de ha idejön Tibor és közli hogy hülye vagyok, nagyképű (ezt vállalom), és inkább ne írjak semmit, erre pedig 30 ember ugrik hogy végre fröcsög a vér, úgy nem tudom elmagyarázni annak az EGY embernek.
És ide a bökőt, hogy azon felül hogy Tibor azt bizonygatja majd, hogy ő mennyire korrekt módon fogalmaz, és nem érti miért sértődik ezen meg mindenki, nem fogja elmagyarázni szerencsétlennek, vagy ha igen, akkor valami érthetetlen ámde roppant szabatos magyarázattal.
Az elvet próbáltam MEGÉRTETNI egy laikusnak tűnő emberrel, mert én hiszem, hogy aki akar, bármit képes megérteni.
Éppen EZÉRT nyílván van benne ellentmondás, pontatlanság, hülyeség, de ez egy BESZÉLGETÉS, vagyis interaktív, a kérdező visszakérdez, én megvilágítom neki más irányból, más magyarázattal, de ha idejön Tibor és közli hogy hülye vagyok, nagyképű (ezt vállalom), és inkább ne írjak semmit, erre pedig 30 ember ugrik hogy végre fröcsög a vér, úgy nem tudom elmagyarázni annak az EGY embernek.
És ide a bökőt, hogy azon felül hogy Tibor azt bizonygatja majd, hogy ő mennyire korrekt módon fogalmaz, és nem érti miért sértődik ezen meg mindenki, nem fogja elmagyarázni szerencsétlennek, vagy ha igen, akkor valami érthetetlen ámde roppant szabatos magyarázattal.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 december 11, 07:26
Írta: keri Dátum 2012 december 11, 07:26
Nyugi, nem te indítottad.
Tibornak szokása ez.
Tibornak szokása ez.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 december 11, 07:29
Írta: besirkyjh Dátum 2012 december 11, 07:29
Szia
Igy jár az aki probál segiteni , még ha hibázik is néha ! Csak abbol hogy a hibák kezelése milyen hangnemben történik a Te eddigi hitelességed bukik vagy sem !
Meg kellene az embereknek már tanulni a hibát javitani és nem csak felhivni rá a figyelmet de föleg nem a más farvizén evezve bologatni .
Beváltnak látszik : nem irok számokat nem irok konkrétan semmit csak javaslok és felhivom a figyelmet a másnak más lehet a véleménye dologra .
Ha nem akarod hogy az eddigi irásaid semmi értéket ne képviseljenek kerüld a konkrétumokat legalább is addig mig meg nem tanulunk komunnikálni egymással és nem tudjuk kezelni egymást kulturáltan !
Igy jár az aki probál segiteni , még ha hibázik is néha ! Csak abbol hogy a hibák kezelése milyen hangnemben történik a Te eddigi hitelességed bukik vagy sem !
Meg kellene az embereknek már tanulni a hibát javitani és nem csak felhivni rá a figyelmet de föleg nem a más farvizén evezve bologatni .
Beváltnak látszik : nem irok számokat nem irok konkrétan semmit csak javaslok és felhivom a figyelmet a másnak más lehet a véleménye dologra .
Ha nem akarod hogy az eddigi irásaid semmi értéket ne képviseljenek kerüld a konkrétumokat legalább is addig mig meg nem tanulunk komunnikálni egymással és nem tudjuk kezelni egymást kulturáltan !
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 december 11, 07:43
Írta: keri Dátum 2012 december 11, 07:43
A videót látva értem mit akarsz.
Ott egy G-kód alapján vezérlést oldottak meg vele. Erre kétségtelenül kiváló, olyannyira hogy majd elkérem tőled a megoldást :)
Azonban itt külön léptető motor meghajtó áramkör van. Azt azért ne hagyd ki, mert így jobb teljesítményre lesz képes a motorod, a hogy azt pontatlanul és műszakilag nem szabatos módon leírtam [#idiota]
És kérdezz nyugodtan, Tiborral majd én foglalkozok [#eplus2]
Ott egy G-kód alapján vezérlést oldottak meg vele. Erre kétségtelenül kiváló, olyannyira hogy majd elkérem tőled a megoldást :)
Azonban itt külön léptető motor meghajtó áramkör van. Azt azért ne hagyd ki, mert így jobb teljesítményre lesz képes a motorod, a hogy azt pontatlanul és műszakilag nem szabatos módon leírtam [#idiota]
És kérdezz nyugodtan, Tiborral majd én foglalkozok [#eplus2]
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 december 11, 08:06
Írta: keri Dátum 2012 december 11, 08:06
Most nincs kedvem elmagyarázni, mert nyilván pongyola lennék és 30-an lesik hogy helyesírási hibát vétsek.
Nyilván te sem azért kérdezed mert nem vagy tisztában vele.
Ezért csak simán linkelem a megoldást. hogy lásd tisztában vagyok vele :)
Nyilván te sem azért kérdezed mert nem vagy tisztában vele.
Ezért csak simán linkelem a megoldást. hogy lásd tisztában vagyok vele :)
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2012 december 11, 08:46
Írta: Rabb Ferenc Dátum 2012 december 11, 08:46
Már alig várom december 21-ét! Akkor talán vége szakad ennek a kutyakomédiának is. De ha nem, akkor legalább a nem teljesen EU-konform mákosbájgli talán tompítja az indulatokat.
De addig se egyétek meg az adventi koszorút [#idiota]
De addig se egyétek meg az adventi koszorút [#idiota]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 december 11, 09:10
Írta: 000000000 Dátum 2012 december 11, 09:10
Jó a linked! :))))
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 december 11, 09:11
Írta: 000000000 Dátum 2012 december 11, 09:11
A #3616-os bejegyzésem egy kérés volt, nem gyalázás, ezt csak te érzed annak ismételten.
Tanácsolnám, hogy inkább kicsit szálljál már magadba, fejezd már be az idétlen magatartásodat és egyelőre Te tanuljál emberi viselkedést, és kérjél elnézést a Fórum olvasóitól azért a két iszonyatos sületlen mondatodért. Ezt már mások is kérték Tőled! Erre koncentrálj, ha még írsz bármit is ezzel kapcsolatban, és légy sokkal szerényebb ilyen tudás mellett! Ne keverjél ide gyalázkodást, meg velem kapcsolatban semmi téves érzésedet, inkább törekedj szakszerűen tanácsot adni, vagy inkább semmit ne írjál, ha valamihez nem értesz. Ennyi ez a történet, csak Te nem tudsz szabadulni a téves előítéleteidtől velem kapcsolatban.
Tanácsolnám, hogy inkább kicsit szálljál már magadba, fejezd már be az idétlen magatartásodat és egyelőre Te tanuljál emberi viselkedést, és kérjél elnézést a Fórum olvasóitól azért a két iszonyatos sületlen mondatodért. Ezt már mások is kérték Tőled! Erre koncentrálj, ha még írsz bármit is ezzel kapcsolatban, és légy sokkal szerényebb ilyen tudás mellett! Ne keverjél ide gyalázkodást, meg velem kapcsolatban semmi téves érzésedet, inkább törekedj szakszerűen tanácsot adni, vagy inkább semmit ne írjál, ha valamihez nem értesz. Ennyi ez a történet, csak Te nem tudsz szabadulni a téves előítéleteidtől velem kapcsolatban.
Cím: Re:Léptetőmotor
Írta: bjam28 Dátum 2012 december 11, 09:11
Írta: bjam28 Dátum 2012 december 11, 09:11
Nem akarom offolni a topicot, de most idevág:
van egy megépített vezérlőm eladó amin fut rStepController. A kártya közvetlenül a fejlesztőtől (Reza Naima) származik . Ha valakit érdekel, nézzen át az adok-veszek-be.
van egy megépített vezérlőm eladó amin fut rStepController. A kártya közvetlenül a fejlesztőtől (Reza Naima) származik . Ha valakit érdekel, nézzen át az adok-veszek-be.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 december 11, 09:48
Írta: keri Dátum 2012 december 11, 09:48
OK, kérés volt, csak én érzem gyalázkodásnak.
Ugorjunk.
Kérlek magyarázd el.
Ez a magadba szállós szöveg meg tőlem van, látom neked nem sikerült megfogadni, de kérlek ne plagizálj, mert úgy jársz mint Smith Pál.
Ugorjunk.
Kérlek magyarázd el.
Ez a magadba szállós szöveg meg tőlem van, látom neked nem sikerült megfogadni, de kérlek ne plagizálj, mert úgy jársz mint Smith Pál.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 december 11, 10:03
Írta: 000000000 Dátum 2012 december 11, 10:03
Valóban ugorjunk, ez egy léptető motor topik.
A téma részemről lezárva, bízzuk nyugodtan az Olvasóra a REÁLIS, OBJEKTÍV következtetések levonását.
A téma részemről lezárva, bízzuk nyugodtan az Olvasóra a REÁLIS, OBJEKTÍV következtetések levonását.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 december 11, 10:37
Írta: keri Dátum 2012 december 11, 10:37
Ugortam, de még mindig nincs miből levonni a következtetéseket az olvasónak, mert eddig csak én próbáltam elmagyarázni mi a különbség egy 12V-os régi és egy újabb fajta alacsony feszültségű léptető szemlélete között.
Igen, látom a pontatlanságokat, amiket leírtam, de jobb lenne ha te magyaráznád el, mert én még mindig nem értem, ezek miért olyan tragikus tévedések, hogy hallgatást tanácsolsz nekem.
Igen, látom a pontatlanságokat, amiket leírtam, de jobb lenne ha te magyaráznád el, mert én még mindig nem értem, ezek miért olyan tragikus tévedések, hogy hallgatást tanácsolsz nekem.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 december 11, 10:38
Írta: keri Dátum 2012 december 11, 10:38
És komolyan érdekelne, műszakilag és nem kötekedés szempontjából!
Cím: Re:Léptetőmotor
Írta: mxjj54gxi Dátum 2012 december 11, 10:46
Írta: mxjj54gxi Dátum 2012 december 11, 10:46
Kérni szeretnék tőled valamit, de ez tényleg nagyon fontos!
Ha ilyen mondatokat írsz be :
"Inkább ne írjál már semmit, ha csak ilyen műszaki butaságokra vagy képes. " egy komplett beírásnak, akkor azzal önmagában nem viszed előbbre a társalgást, a téma értelmezését, a problémák megoldását, és a hiba kijavítását sem.
Úgy kellett rákérdezni, hogy mi nem tetszik neked.És aki nem vágja kapásból a bajt, annak csak azután jött elő az agyában a villanycső.
Miért nem lehetett elsőre idézni az inkriminált mondatokat, a hibák kiemelésével és a szabatos, jó megoldás leírásával ahelyett, hogy itt oldalakon olvashatjuk, ahogy egymásnak estek?
Nem szeretjük olvasni az anyázkodást, sokkal inkább a jó megoldásokat, a hibák javítását PÁR MONDATBAN.
Köszönöm, hogy eztán így teszel majd.
Nem.
Nem érdekel ki kezdte, úgyis az van, hogy " Azú gy kezdődött, hogy visszaütött!"
Ha ilyen mondatokat írsz be :
"Inkább ne írjál már semmit, ha csak ilyen műszaki butaságokra vagy képes. " egy komplett beírásnak, akkor azzal önmagában nem viszed előbbre a társalgást, a téma értelmezését, a problémák megoldását, és a hiba kijavítását sem.
Úgy kellett rákérdezni, hogy mi nem tetszik neked.És aki nem vágja kapásból a bajt, annak csak azután jött elő az agyában a villanycső.
Miért nem lehetett elsőre idézni az inkriminált mondatokat, a hibák kiemelésével és a szabatos, jó megoldás leírásával ahelyett, hogy itt oldalakon olvashatjuk, ahogy egymásnak estek?
Nem szeretjük olvasni az anyázkodást, sokkal inkább a jó megoldásokat, a hibák javítását PÁR MONDATBAN.
Köszönöm, hogy eztán így teszel majd.
Nem.
Nem érdekel ki kezdte, úgyis az van, hogy " Azú gy kezdődött, hogy visszaütött!"
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 december 11, 11:54
Írta: 000000000 Dátum 2012 december 11, 11:54
Te még relatíve új vagy itt a Fórumon, DC szervóhajtás topikban évekkel ezelőtt kitárgyaltuk a témát, nézz utána, ha netán Te se tudnád, miért szóltam ekkora műszaki marhaság kapcsán, amit Keri írt. Egy a lényeg, túl nagy műszaki idétlenség ne legyen itt köztudatban, és szerintem az már önmaga hasznos, ha valaki erre figyelmeztet. Így aztán Te is nyugodtan szóljál rám, ha azt látod, én rosszat írtam szakmailag, ezen nem megsértődni kell, hanem belátni a hibát, ha tényleg az. Ezeknek akkor is így kell lennie, ha csak Hobby Fórum a neve ennek az egésznek.
Cím: Re:Léptetőmotor
Írta: mxjj54gxi Dátum 2012 december 11, 12:03
Írta: mxjj54gxi Dátum 2012 december 11, 12:03
Minden szavaddal egyetértek.
Nem is azzal van a baj, hogy a hibára fel akarod hívni a figyelmet.
Azzal van a baj, hogy ezt rossz formában valósítod meg, mert csak benyögöd, hogy
"Inkább ne írjál már semmit, ha csak ilyen műszaki butaságokra vagy képes. "
Ez kevés.Ez felhívás anyázásra.
Amint hibát észlelsz, ne azt írd be, hogy hibát észleltél, hanem azt, hogy mit és miért. Mindjárt az első beszólásban.
És hidd el, azonnal senki sem fog veled vitázni többé, mi okosabbak leszünk, a hibázó is, és nem kell elolvasni két oldal anyázást.
Nem is azzal van a baj, hogy a hibára fel akarod hívni a figyelmet.
Azzal van a baj, hogy ezt rossz formában valósítod meg, mert csak benyögöd, hogy
"Inkább ne írjál már semmit, ha csak ilyen műszaki butaságokra vagy képes. "
Ez kevés.Ez felhívás anyázásra.
Amint hibát észlelsz, ne azt írd be, hogy hibát észleltél, hanem azt, hogy mit és miért. Mindjárt az első beszólásban.
És hidd el, azonnal senki sem fog veled vitázni többé, mi okosabbak leszünk, a hibázó is, és nem kell elolvasni két oldal anyázást.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 december 11, 12:15
Írta: keri Dátum 2012 december 11, 12:15
Csak szólok hogy átvetted a stafétát tőlem :)
Ne tedd! Értelmetlen.
Ne tedd! Értelmetlen.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 december 11, 12:22
Írta: 000000000 Dátum 2012 december 11, 12:22
"Ez kevés.Ez felhívás anyázásra."
Szerinted így van, szerintem meg ha valaki figyelmeztet a rosszra, helytelenre, az több a semminél, és pozitívabb, mintha szónélkül itt marad sok téves állítás.
Az pedig már intelligencia kérdése, hogy a szakmaiatlanságot állító hogyan reagál a kérésre, hogy ne írkáljon butaságot.
De nagyon unalmas ez nekem, és se időm, se energiám ilyen vitákra, az lenne a kérésem zárjuk már le ezt a témát.
Nekem bőven elégtétel volt, és dícséretes emberi viselkedés volt ezügyben, hogy még Svejk is a #3624 rászólt az illetékesre, és mintha Ő sem értene egyet Kerivel ezügyben.[#ejnye1]
Szerinted így van, szerintem meg ha valaki figyelmeztet a rosszra, helytelenre, az több a semminél, és pozitívabb, mintha szónélkül itt marad sok téves állítás.
Az pedig már intelligencia kérdése, hogy a szakmaiatlanságot állító hogyan reagál a kérésre, hogy ne írkáljon butaságot.
De nagyon unalmas ez nekem, és se időm, se energiám ilyen vitákra, az lenne a kérésem zárjuk már le ezt a témát.
Nekem bőven elégtétel volt, és dícséretes emberi viselkedés volt ezügyben, hogy még Svejk is a #3624 rászólt az illetékesre, és mintha Ő sem értene egyet Kerivel ezügyben.[#ejnye1]
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 december 11, 12:54
Írta: keri Dátum 2012 december 11, 12:54
Tévedsz.
Csak a te elved alapján szóltam :)
Csak a te elved alapján szóltam :)
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 december 11, 13:09
Írta: keri Dátum 2012 december 11, 13:09
Mellesleg még mindig várom, hogy elmond hogy hangzott volna helyesen amit írtam.
Amíg ezt nem teszed, azt kell hinnem, hogy helyesen írtam le, csak te vagy kötekedő.
Amíg ezt nem teszed, azt kell hinnem, hogy helyesen írtam le, csak te vagy kötekedő.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 december 11, 13:28
Írta: svejk Dátum 2012 december 11, 13:28
No ja!
Más hibáját könnyebb meglátni mint a sajátomat. :)
(én ugyan még most is azt gondolom , hogy valami egészen mást akart írni Keri, mert ez így tényleg durva volt.
Más hibáját könnyebb meglátni mint a sajátomat. :)
(én ugyan még most is azt gondolom , hogy valami egészen mást akart írni Keri, mert ez így tényleg durva volt.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 december 11, 13:50
Írta: keri Dátum 2012 december 11, 13:50
Nyilván másra gondoltunk, de tényleg nem tudom meg soha, mert senki nem akarja elmondani, csak el kéne fogadnom bemondásra, hogy hülye vagyok és iratkozzak le :D
Cím: Re:Léptetőmotor
Írta: mxjj54gxi Dátum 2012 december 11, 15:08
Írta: mxjj54gxi Dátum 2012 december 11, 15:08
Igen, csakhogy te nem egyszerűen figyelmeztetted a rosszra, hanem elküldted innen, miközben nem oldottad fel a hiba leírásával a kérdéskört.
Csakhogy bárkinek és mindenkinek joga van butaságokat mondani, emiatt nem lehet elküldeni sehová.
Ki lehet javítani - de elküldeni nem.
Képzeld el, te sem lennél ilyen okos, ha mindenki elküldött volna a szomszéd szobába, ha butaságot mondtál. Nem okosan születtél, tanítottak mindenre, ami ma vagy.
A témát én is lezártam, legközelebb remélem nem ez lesz.
Csakhogy bárkinek és mindenkinek joga van butaságokat mondani, emiatt nem lehet elküldeni sehová.
Ki lehet javítani - de elküldeni nem.
Képzeld el, te sem lennél ilyen okos, ha mindenki elküldött volna a szomszéd szobába, ha butaságot mondtál. Nem okosan születtél, tanítottak mindenre, ami ma vagy.
A témát én is lezártam, legközelebb remélem nem ez lesz.
Cím: Re:Léptetőmotor
Írta: mxjj54gxi Dátum 2012 december 11, 15:10
Írta: mxjj54gxi Dátum 2012 december 11, 15:10
A dc motor alapból nem kötelezően nagy ellenállású, és nem kötelezően lomha.
Lehet olyan is, meg igen fürge is, kialakítástól függően.Ez volt a tévedésed.
A DC szervomotorok igencsak nagy dinamikákra is képesek, ha akarják. Ehhez kicsi rotorátmérő, nagy áramok szükségesek, de megoldható simán.
Lehet olyan is, meg igen fürge is, kialakítástól függően.Ez volt a tévedésed.
A DC szervomotorok igencsak nagy dinamikákra is képesek, ha akarják. Ehhez kicsi rotorátmérő, nagy áramok szükségesek, de megoldható simán.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 december 11, 15:30
Írta: 000000000 Dátum 2012 december 11, 15:30
Igen pontatlanul, trehány módon fogalmazol. Nem elküldtem, hanem megkértem, ne írjon ilyeneket. Óriási különbség!!!
Hülyének egy témához pedig lehet lenni, bánom is én, de:
1. a hülyeségét ne kijelentésképpen, állításképpen közölje, minimum elvárható egy "szerintem" szó.
2. Utána erre ne legyen büszke, és nagyképű továbbra is.
Ezek a dolgok ilyen egyszerűek nálam, és ezeket az alapelveket magamra is alkalmazom. Ezért aztán ha megfigyeled, amihez nem értek, ahhoz témához nem is írok semmit.
De nem tudom meddig rugózol és értetlenkedsz még, úgy látszik, olyan szerencsés vagy, hogy sok időd van napközben a triviális dolgokon filozófálgatni.
Hülyének egy témához pedig lehet lenni, bánom is én, de:
1. a hülyeségét ne kijelentésképpen, állításképpen közölje, minimum elvárható egy "szerintem" szó.
2. Utána erre ne legyen büszke, és nagyképű továbbra is.
Ezek a dolgok ilyen egyszerűek nálam, és ezeket az alapelveket magamra is alkalmazom. Ezért aztán ha megfigyeled, amihez nem értek, ahhoz témához nem is írok semmit.
De nem tudom meddig rugózol és értetlenkedsz még, úgy látszik, olyan szerencsés vagy, hogy sok időd van napközben a triviális dolgokon filozófálgatni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 december 11, 15:31
Írta: 000000000 Dátum 2012 december 11, 15:31
Na csezd meg, lesheted, mikor dicsérlek meg legközelebb, Te hibanélküli ember!:)))))
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 december 11, 15:38
Írta: svejk Dátum 2012 december 11, 15:38
Má' megint mi rosszat írtam??
Egyébként tényleg ez tűnik ki az írásaimból hogy én hiba nélkülinek tartom magam? :((
Pedig én próbálok magammal önkritikus lenni, mneg elég kishitű is vagyok, de akkor úgy látszik nem eléggé.[#nemtudom]
Egyébként tényleg ez tűnik ki az írásaimból hogy én hiba nélkülinek tartom magam? :((
Pedig én próbálok magammal önkritikus lenni, mneg elég kishitű is vagyok, de akkor úgy látszik nem eléggé.[#nemtudom]
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 december 11, 15:56
Írta: keri Dátum 2012 december 11, 15:56
Kösz.
Tehát azt mondod, hogy egy azonos teljesítményű 3V-os és 12V-os motor közül a 12V-os lesz a dinamikusabb azonos feszültségen hajtva, a névleges áramokra korlátozva?
Tehát azt mondod, hogy egy azonos teljesítményű 3V-os és 12V-os motor közül a 12V-os lesz a dinamikusabb azonos feszültségen hajtva, a névleges áramokra korlátozva?
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 december 11, 16:00
Írta: keri Dátum 2012 december 11, 16:00
És persze azonos álló és forgórésszel.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 december 11, 16:32
Írta: 000000000 Dátum 2012 december 11, 16:32
Itt nagyon sok okosság van stepper meghajtókról: http://www.pminmo.com/
Cím: Re:Léptetőmotor
Írta: mxjj54gxi Dátum 2012 december 11, 18:36
Írta: mxjj54gxi Dátum 2012 december 11, 18:36
Nem, de te se ezt mondtad anno.
Sok kérdés merül fel ebben a látszólag egyszerű kérdésedben.
Azonos teljesítményű motorokról írsz, de egyik 3 voltos, másik 12 és mégis azonos áramokon hajtjuk.
Akkor hol az azonos teljesítmény?
Egy motor forgórészének felgyorsításához energiát kell közölni. Minél nagyobb energiát közlünk egységnyi idő alatt, annál nagyobb lesz a pilanatnyi gyorsulása, hétköznapi megfogalmazásban annál dinamikusabban indul.
Az egységnyi idő alatt bevitt energia a teljesítmény, tehát ha nagyobb a teljesítmény, nagyobb a szöggyorsulás.
A bevitt energia azonban az induláskor a mocira adott feszültség és a motor pillanatnyi áramlefolyásának idő szerinti integráljának szorzata.
Az áram integráljában vesszük figyelembe a moci impedanciájából adódó időbeli változást: nem tud kialakulni azonnal az üzemi áram, mert az induktív jelleg késlelteti azt.
Amit szerintem te akartál mondani az az, hogy egy 3 voltos léptetőt könnyebb dinamikusabb mozgásra késztetni ha olyan meghajtó áramkörünk van, aminek tápfeszültsége nem a moci névleges feszültsége, hanem annak kb 10-12 szerese, de közben a tekercset védendő, áramkorlátozást alkalmazunk a névleges áramon.
Ezzel azt érjük el, hogy az áram bekapcsoláskori felfutásának meredeksége nagyobb lesz, és emiatt hamarabb eléri a tekercs a névleges áramot, ebből adódóan az áram idő szerinti integrálja nagyobb lesz, mint névleges áramon indítva lenne, vagyis a több energiabevitellel dinamikusabb mozgásra késztettük a mocit.
Csakhogy ezt a 10-12x tápfesz dolgot nem tudjuk megcsinálni a 12 voltos mocinál, mert ott ez 120-144voltos tápfeszt jelentene, és félő, hogy ha ekkora feszkót adunk a mocira, akkor átüt a tekercselés.
Ezért alkalmazzák a léptecsekben a viszonylag alacsony névleges feszültségű tekercselést.
Sok kérdés merül fel ebben a látszólag egyszerű kérdésedben.
Azonos teljesítményű motorokról írsz, de egyik 3 voltos, másik 12 és mégis azonos áramokon hajtjuk.
Akkor hol az azonos teljesítmény?
Egy motor forgórészének felgyorsításához energiát kell közölni. Minél nagyobb energiát közlünk egységnyi idő alatt, annál nagyobb lesz a pilanatnyi gyorsulása, hétköznapi megfogalmazásban annál dinamikusabban indul.
Az egységnyi idő alatt bevitt energia a teljesítmény, tehát ha nagyobb a teljesítmény, nagyobb a szöggyorsulás.
A bevitt energia azonban az induláskor a mocira adott feszültség és a motor pillanatnyi áramlefolyásának idő szerinti integráljának szorzata.
Az áram integráljában vesszük figyelembe a moci impedanciájából adódó időbeli változást: nem tud kialakulni azonnal az üzemi áram, mert az induktív jelleg késlelteti azt.
Amit szerintem te akartál mondani az az, hogy egy 3 voltos léptetőt könnyebb dinamikusabb mozgásra késztetni ha olyan meghajtó áramkörünk van, aminek tápfeszültsége nem a moci névleges feszültsége, hanem annak kb 10-12 szerese, de közben a tekercset védendő, áramkorlátozást alkalmazunk a névleges áramon.
Ezzel azt érjük el, hogy az áram bekapcsoláskori felfutásának meredeksége nagyobb lesz, és emiatt hamarabb eléri a tekercs a névleges áramot, ebből adódóan az áram idő szerinti integrálja nagyobb lesz, mint névleges áramon indítva lenne, vagyis a több energiabevitellel dinamikusabb mozgásra késztettük a mocit.
Csakhogy ezt a 10-12x tápfesz dolgot nem tudjuk megcsinálni a 12 voltos mocinál, mert ott ez 120-144voltos tápfeszt jelentene, és félő, hogy ha ekkora feszkót adunk a mocira, akkor átüt a tekercselés.
Ezért alkalmazzák a léptecsekben a viszonylag alacsony névleges feszültségű tekercselést.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 december 11, 18:59
Írta: keri Dátum 2012 december 11, 18:59
Úgy kezdődött, hogy az ember felvetett egy 3V-os léptetőt, majd rákérdezett hogy lehet hogy jobb lenne egy 12V-osat használni. Erről akartam lebeszélni.
Egyébként pontosan erről van szó amit leírtál.
Egyébként pontosan erről van szó amit leírtál.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 december 11, 20:33
Írta: 000000000 Dátum 2012 december 11, 20:33
De te bekeverted a DC motort, ami NEM léptetőmotor!
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 december 11, 20:33
Írta: s7manbs8 Dátum 2012 december 11, 20:33
Úgy kezdődött, hogy vala az egy ... :)
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 december 11, 20:39
Írta: ANTAL GÁBOR Dátum 2012 december 11, 20:39
Én kissé elnagyoltnak érzem a leírást : A bevitt energia két részre fordítódik : egyrészt melegíti a tekercset ( ez nem hasznos nekünk ) másrészt mágneses indukciót hoz létre a motorban ami a belső állandó mágnessel létrehozza a forgatónyomatékot. Szerintem a bevitt energia szerinti kategorizálás nem helyes.
Cím: Re:Léptetőmotor
Írta: mxjj54gxi Dátum 2012 december 11, 20:49
Írta: mxjj54gxi Dátum 2012 december 11, 20:49
Szerintem a bevitt energia szerinti kategorizálás nem helyes
Ezt hogy érted?
Ezt hogy érted?
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 december 11, 21:08
Írta: ANTAL GÁBOR Dátum 2012 december 11, 21:08
"Az egységnyi idő alatt bevitt energia a teljesítmény, tehát ha nagyobb a teljesítmény, nagyobb a szöggyorsulás." Ez csak azonos hatásfokú motoroknál igaz. Az energia egy része hőveszteség formájában számunkra haszontalan.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2012 december 11, 21:11
Írta: ANTAL GÁBOR Dátum 2012 december 11, 21:11
Hőveszteség= hőfejlődéssel járó számunkra haszontalan energiaátalakulás
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 december 11, 22:26
Írta: keri Dátum 2012 december 11, 22:26
Valóban nem, de nem is szervo motor.
A fizikai alapja ugyan az, csak a vezérlése más.
A fizikai alapja ugyan az, csak a vezérlése más.
Cím: Re:Léptetőmotor
Írta: mxjj54gxi Dátum 2012 december 12, 07:47
Írta: mxjj54gxi Dátum 2012 december 12, 07:47
Na de ezt én a Keri példájára írtam,ahol azonos motortesteket feltételezett.
De nem akartam belemenni a fejtegetésbe doktori disszertáció szinten.
Ha már veszteségeknél tartunk, nem csak a tekercs melegszik majd veszteségből, de a vas is a vasveszteségből, meg a csapágy a surlódásból, sőt még a rotor forgása is elemészt a légellenállás miatt némi energiát.
Aztán nem vettük figyelembe azt, hogy a rotor mágneses térben forog, ami visszahat a tekercselésének áramára, annak időbeli lefolyására, ráadásul attól függően, hogy milyen módon van betekerve az a forgórész, hány kommutátoros satöbbi.
Erről könyveket lehet írni, pont a tekercshőt kiemelned belőle kicsit önkényes dolog.
Én csak megpróbáltam slágvortokban összefoglalni a lényeget.
De nem akartam belemenni a fejtegetésbe doktori disszertáció szinten.
Ha már veszteségeknél tartunk, nem csak a tekercs melegszik majd veszteségből, de a vas is a vasveszteségből, meg a csapágy a surlódásból, sőt még a rotor forgása is elemészt a légellenállás miatt némi energiát.
Aztán nem vettük figyelembe azt, hogy a rotor mágneses térben forog, ami visszahat a tekercselésének áramára, annak időbeli lefolyására, ráadásul attól függően, hogy milyen módon van betekerve az a forgórész, hány kommutátoros satöbbi.
Erről könyveket lehet írni, pont a tekercshőt kiemelned belőle kicsit önkényes dolog.
Én csak megpróbáltam slágvortokban összefoglalni a lényeget.
Cím: Re:Léptetőmotor
Írta: VighLajos Dátum 2012 december 12, 07:57
Írta: VighLajos Dátum 2012 december 12, 07:57
Dehogy haszontalan!
[#ejnye1]
Ezek a hőveszteségek (villanybojler, szalagfűrész, körfűrész, csiszológép és az én közel - felülről közel- 100 kilóm) tart 6 C fokot az asztalosműhellyé berendezett szuterénomban!
[#eljen]
[#ejnye1]
Ezek a hőveszteségek (villanybojler, szalagfűrész, körfűrész, csiszológép és az én közel - felülről közel- 100 kilóm) tart 6 C fokot az asztalosműhellyé berendezett szuterénomban!
[#eljen]
Cím: Re:Léptetőmotor
Írta: zotykó Dátum 2012 december 12, 08:33
Írta: zotykó Dátum 2012 december 12, 08:33
Na. Hogy kicsit kiszakadjunk a vitából.
Tegnap kísérleteztem. A kicsi Nanotec motorvezérlőmet rátettem egy 0.4Nm-es nema17 motorra és freki generátorról elkezdtem hajtani. A vezérlő 1/8 lépésben volt, 2.0A-al. 443KHz volt a bemeneten a freki, amikor már nem bírta a moci és leállt. Azt számoltam, hogy 16500 ford/ perc volt a fordulatszáma. Ez azért nem rossz nem? Csak mint érdekesség. Nem is az a lényeg, hogy ennyit pörög a motor, mert ilyenkor már nincs nyomatéka, hanem a vezérlő gyorsasága. Toshiba TA8435H ic van benne. Most rendeltem Kínából.
További képek itt.
Tegnap kísérleteztem. A kicsi Nanotec motorvezérlőmet rátettem egy 0.4Nm-es nema17 motorra és freki generátorról elkezdtem hajtani. A vezérlő 1/8 lépésben volt, 2.0A-al. 443KHz volt a bemeneten a freki, amikor már nem bírta a moci és leállt. Azt számoltam, hogy 16500 ford/ perc volt a fordulatszáma. Ez azért nem rossz nem? Csak mint érdekesség. Nem is az a lényeg, hogy ennyit pörög a motor, mert ilyenkor már nincs nyomatéka, hanem a vezérlő gyorsasága. Toshiba TA8435H ic van benne. Most rendeltem Kínából.
További képek itt.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 december 12, 08:49
Írta: keri Dátum 2012 december 12, 08:49
Valahogy olyan érzésem, van hogy igazán szakszerű leírás nem létezik :D
Ráadásul nem értek veled egyet. Az hogy más feszültségre méreteznek egy motor tekercselést, attól még nem feltétlenül növekszik a réz+vas veszteség, hiszen a nagyobb menetszámhoz tartozó ellenállás növekedéshez arányosan kisebb áram is tartozik, tehát az így eldisszipált teljesítmény azonos feltételek mellet nem növekszik.
Csupán az indukció lesz nagyobb, amihez alap esetben nagyobb feszültség is tartozik, tehát ennek sem kéne paraméterbeli változást okoznia, de ahogy rferi leírta, a "tuningolásra" kisebb arányú feszültség emeléssel van csak lehetőség és itt a hátránya, a nagyobb feszültségű léptetőknek.
Ráadásul nem értek veled egyet. Az hogy más feszültségre méreteznek egy motor tekercselést, attól még nem feltétlenül növekszik a réz+vas veszteség, hiszen a nagyobb menetszámhoz tartozó ellenállás növekedéshez arányosan kisebb áram is tartozik, tehát az így eldisszipált teljesítmény azonos feltételek mellet nem növekszik.
Csupán az indukció lesz nagyobb, amihez alap esetben nagyobb feszültség is tartozik, tehát ennek sem kéne paraméterbeli változást okoznia, de ahogy rferi leírta, a "tuningolásra" kisebb arányú feszültség emeléssel van csak lehetőség és itt a hátránya, a nagyobb feszültségű léptetőknek.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 december 12, 09:01
Írta: keri Dátum 2012 december 12, 09:01
Passzívház is ezen az elven működik :)
Cím: Re:Léptetőmotor
Írta: keri Dátum 2012 december 12, 09:08
Írta: keri Dátum 2012 december 12, 09:08
Nem rossz hol adják ezt a vezérlőt?
Cím: Re:Léptetőmotor
Írta: zotykó Dátum 2012 december 12, 09:33
Írta: zotykó Dátum 2012 december 12, 09:33
Nem tudom hol lehet venni. Én megvettem egy félkész géppel együtt.
Tetszik nekem is, mert pici és nagyon jó.
Német fórumokon találtam róla infót. Mondom kipróbáltam a Toshiba ic-t és azzal is megy. A Toshiba sokkal olcsóbb.A vezérlő adatlapja
Tetszik nekem is, mert pici és nagyon jó.
Német fórumokon találtam róla infót. Mondom kipróbáltam a Toshiba ic-t és azzal is megy. A Toshiba sokkal olcsóbb.A vezérlő adatlapja
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 december 12, 09:38
Írta: 000000000 Dátum 2012 december 12, 09:38
[#eljen]
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 december 12, 11:56
Írta: besirkyjh Dátum 2012 december 12, 11:56
Azt hiszem az Ádám használt ilyet régebben ( mármint a TB8435 ) de valamiért leállt vele .
Lehet kicsi volt az áram ?
Lehet kicsi volt az áram ?
Cím: Re:Léptetőmotor
Írta: mxjj54gxi Dátum 2012 december 12, 12:23
Írta: mxjj54gxi Dátum 2012 december 12, 12:23
De ez TA8435
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2012 december 12, 16:09
Írta: besirkyjh Dátum 2012 december 12, 16:09
Szia
Igen csak elírtam :(
Igen csak elírtam :(
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 december 12, 16:15
Írta: s7manbs8 Dátum 2012 december 12, 16:15
Na, itt is van ilyen nálam, akkor ezt hogy kell bekötni tudja valaki ?




Cím: Re:Léptetőmotor
Írta: zotykó Dátum 2012 december 12, 17:05
Írta: zotykó Dátum 2012 december 12, 17:05
Ez a narancssárga 4 p csati a motoré lehet.
A 10 p csati meg a PowerGND, PowerVss, kimenő+5v kimenőGND, step, dir enable. Ha vissza követed a benne lévő nagy puffer kondit, valószínű az lesz a power táp 21-37V.
A bemenetek 5V-os tápja ugyanazon a GND potenciálon van. Akkor meg lesz a gnd pont. Az 5V-os táp jelekhez biztos egy stab ic-vel van megoldva. Azt is könnyű megtalálni.
A GND-hez képest majd megtalálod a +5V-ot. A többi meg kiderül, ha valamilyen TTL jelet adsz rá. Az áramot a nagy zöld ellenállással lehet belőni. A fél, negyed és nyolcad lépést meg az ic 8-as és 9-es lábán lehet beállítani.
Az adatlapja ott van az előző hozzászólásomban. a további képek link alatt.
A 10 p csati meg a PowerGND, PowerVss, kimenő+5v kimenőGND, step, dir enable. Ha vissza követed a benne lévő nagy puffer kondit, valószínű az lesz a power táp 21-37V.
A bemenetek 5V-os tápja ugyanazon a GND potenciálon van. Akkor meg lesz a gnd pont. Az 5V-os táp jelekhez biztos egy stab ic-vel van megoldva. Azt is könnyű megtalálni.
A GND-hez képest majd megtalálod a +5V-ot. A többi meg kiderül, ha valamilyen TTL jelet adsz rá. Az áramot a nagy zöld ellenállással lehet belőni. A fél, negyed és nyolcad lépést meg az ic 8-as és 9-es lábán lehet beállítani.
Az adatlapja ott van az előző hozzászólásomban. a további képek link alatt.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2012 december 12, 17:20
Írta: s7manbs8 Dátum 2012 december 12, 17:20
Kösz.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 december 30, 13:26
Írta: 000000000 Dátum 2012 december 30, 13:26
Sziasztok,
Szerenék segítséget kérni a hozzáértőktől. A dioda.hu-n meghirdetett léptetőmotort vezérlő szerintetek üzemeltethető mach-3 ból, ha igen akkor hogyan, és mi kell hozzá a kártyán kívül?
adatlap
http://dioda.hu/pdf/ims_im483i_im483ie_microsteppingdriver_datasheet.pdf
Előre is köszönöm a segítséget
Üdv
Szerenék segítséget kérni a hozzáértőktől. A dioda.hu-n meghirdetett léptetőmotort vezérlő szerintetek üzemeltethető mach-3 ból, ha igen akkor hogyan, és mi kell hozzá a kártyán kívül?
adatlap
http://dioda.hu/pdf/ims_im483i_im483ie_microsteppingdriver_datasheet.pdf
Előre is köszönöm a segítséget
Üdv
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 december 30, 15:52
Írta: svejk Dátum 2012 december 30, 15:52
Kezdőlap, Featurs 17. pontja: RS422...
Tehát nem. Túl szép lenne, igen profi vezérlő.
Tehát nem. Túl szép lenne, igen profi vezérlő.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2012 december 30, 16:10
Írta: 000000000 Dátum 2012 december 30, 16:10
Köszi,
Van hozzá kiegészítésként RS232. Egyébként szerinted step-dir rendszerű?
Van hozzá kiegészítésként RS232. Egyébként szerinted step-dir rendszerű?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2012 december 30, 17:04
Írta: svejk Dátum 2012 december 30, 17:04
azért a soros portok mert nem step/dir
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 15, 14:47
Írta: 000000000 Dátum 2013 január 15, 14:47
Itt sokan használnak TB6560AHQ léptető motor vezérlő IC-t (kínai 3-4 csatornáson is ezek vannak általában). Egyre inkább az a gyanúm, picit is komolyabb felhasználásra ezek alkalmatlanok, mert lépést tévesztenek már elektronikában is. Erről alapfokon mindenki készíthet tesztet, és meggyőződhet, ha az IC reset kijelző pontját (17-es láb) egy leddel sorbakötött 2.2 k ellenállással +5 V-ra köti, és megjáratja oda-vissza ciklusokkal a motort. Indítás előtt reseteljünk (ekkor a transzlátor alapállapotot kijelzi a Led).
Sajnos már 10-20 másodperces teszt és pozíció visszaállás után nem fog a LED jelezni, tehát elévedt szegényke. Nem is kicsit, van úgy hogy 10-12 mikrolépést.
Ennyi gagyi ilyen IC gyártó van?, vagy ez tényleg egy hibás termék, és úgy vannak vele, jó az a Hobbystának, észre se veszi azt a pár századot.:) Tapasztalt már ilyet valaki? Egyszerűen nem akarom elhinni, hogy egy neves gyártónak ilyen IC-je legyen. Persze azt is lehet mondani: mit akarunk 2000-Ft-os IC-től.:)
Sajnos már 10-20 másodperces teszt és pozíció visszaállás után nem fog a LED jelezni, tehát elévedt szegényke. Nem is kicsit, van úgy hogy 10-12 mikrolépést.
Ennyi gagyi ilyen IC gyártó van?, vagy ez tényleg egy hibás termék, és úgy vannak vele, jó az a Hobbystának, észre se veszi azt a pár századot.:) Tapasztalt már ilyet valaki? Egyszerűen nem akarom elhinni, hogy egy neves gyártónak ilyen IC-je legyen. Persze azt is lehet mondani: mit akarunk 2000-Ft-os IC-től.:)
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2013 január 15, 15:21
Írta: jv7pu3a5p Dátum 2013 január 15, 15:21
Igen, tapasztaltunk.
Barátom gépén hasonlókat művel. Főleg akkor fordul elő, ha kis lépésekben akarunk haladni, szemmel láthatóan nem "lép".
Betudtam annak, hogy nagy a motor (3.1Nm/4.2A) a vezérlőhöz képest. Pedig ez sem állná meg a helyét, mert csak magasabb fordulaton kéne gondnak lennie szerintem ebben a párosításban.
De ha Te is tapasztaltál anomáliát, akkor lehet ennyit tud...
Barátom gépén hasonlókat művel. Főleg akkor fordul elő, ha kis lépésekben akarunk haladni, szemmel láthatóan nem "lép".
Betudtam annak, hogy nagy a motor (3.1Nm/4.2A) a vezérlőhöz képest. Pedig ez sem állná meg a helyét, mert csak magasabb fordulaton kéne gondnak lennie szerintem ebben a párosításban.
De ha Te is tapasztaltál anomáliát, akkor lehet ennyit tud...
Cím: Re:Léptetőmotor
Írta: yuagaci9g Dátum 2013 január 15, 15:28
Írta: yuagaci9g Dátum 2013 január 15, 15:28
Ezt az IC-t nyomtatók vezérlésére fejlesztették anno...
Itt minden oldal után a fej inicializál, nullázza a helyzetét.
Arra jó.
Itt minden oldal után a fej inicializál, nullázza a helyzetét.
Arra jó.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 15, 15:37
Írta: 000000000 Dátum 2013 január 15, 15:37
A lépésközök egyenletességével nekem nem volt bajom a tesztek során (1600-as felbontásnál), azt elég szépen tudja, ha nem lépjük túl a 2.5 A áram csúcsot.
A step jelek "vesznek el" véletlenszerűen az IC-ben, és ez nagyon bosszantó és aggasztó jelenség tud lenni. Már ez is gyanús, hogy a gyári adatlapon is csak 15 kHz-es maximális step frekvencia van megadva. Ez manapság roppant kevés, és érdekes is, hiszen ha 3200-as felbontásban használjuk, akkor az elvi motor határfordulat kevesebb mint 5 1/s. Azért ennyire dinamikailag már nem rosszak a kisebb egy-két Nm-es mai stepmotorok. Szóval van itt pár kérdőjel....
A step jelek "vesznek el" véletlenszerűen az IC-ben, és ez nagyon bosszantó és aggasztó jelenség tud lenni. Már ez is gyanús, hogy a gyári adatlapon is csak 15 kHz-es maximális step frekvencia van megadva. Ez manapság roppant kevés, és érdekes is, hiszen ha 3200-as felbontásban használjuk, akkor az elvi motor határfordulat kevesebb mint 5 1/s. Azért ennyire dinamikailag már nem rosszak a kisebb egy-két Nm-es mai stepmotorok. Szóval van itt pár kérdőjel....
Cím: Re:Léptetőmotor
Írta: w987wzmm Dátum 2013 január 15, 15:42
Írta: w987wzmm Dátum 2013 január 15, 15:42
Sziasztok!
A lépésvesztés mikrostep esetén alakul ki.
Oda-vissza pozicionálás esetében ide-oda billen a lépések között.
Egy példa: MSD vezérlőkön van tartóáram automatikus szabályzása. Ha két lépés között áll meg a motor, hajlamos bebillenni valamelyik pozícióba. Nem lehet a léptecseket két állapot között tartani.
Minél több az oszás mikrolépés, annál nagyobb és több lesz az elveszett lépések száma.

A lépésvesztés mikrostep esetén alakul ki.
Oda-vissza pozicionálás esetében ide-oda billen a lépések között.
Egy példa: MSD vezérlőkön van tartóáram automatikus szabályzása. Ha két lépés között áll meg a motor, hajlamos bebillenni valamelyik pozícióba. Nem lehet a léptecseket két állapot között tartani.
Minél több az oszás mikrolépés, annál nagyobb és több lesz az elveszett lépések száma.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 15, 15:43
Írta: 000000000 Dátum 2013 január 15, 15:43
Na de hát itten a Fórumon is százak használják CNC-re is, éppen ezen csodálkozom. Mi lesz így egy több órás relief marás kapcsán vagy egy pár perces komolyabb tapintós digitalizálásnál?:)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2013 január 15, 15:51
Írta: s7manbs8 Dátum 2013 január 15, 15:51
A férfi reliefből nő lesz, kicsit megnő a feneke. :) Még jó, hogy nekem nincs ilyen IC-m. ... én magam írom a programot is meg a vezérlőt procival, azt teszek bele, amit nem szégyellek.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2013 január 15, 15:53
Írta: s7manbs8 Dátum 2013 január 15, 15:53
Nem elég, hogy a Mach kihagy még a vezérlő is rátesz egy lapáttal, plusz a mechanika megszorul és még az is. Nehéz ez a hobbi CNC-zés. :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 15, 15:58
Írta: 000000000 Dátum 2013 január 15, 15:58
Ha, ezt, pár évvel előbb mondod, el se kezdtem volna. [#nevetes1]
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2013 január 15, 16:36
Írta: s7manbs8 Dátum 2013 január 15, 16:36
Az az egy biztos, hogy az IC akármilyen, amit lehet el kell követni, hogy ne tévesszen, a többi meg a sors ... nagyáramok messze IC től, vezérlővonalaktól, azok szűrve a láb tövén, vagy ha kell még feljebb a toknál, lehet az sem mindegy, a nagy áramú vezeték milyen szögben áll, vagy olyan vezetékezést kell alkalmazni, ami szinte kioltja az elektromágneses kisugárzás szinte teljesen, stb. lehet mire kiderül mi a legjobb bele is őszülünk, de a végén ott a boldogság, hogy lám , nem is az IC a rossz, hanem az a csúnya felhasználó (l)user .
Cím: Re:Léptetőmotor
Írta: 946ywdygt Dátum 2013 január 16, 17:00
Írta: 946ywdygt Dátum 2013 január 16, 17:00
Üdv.
Lenne egy olyan kérdésem, hogy a négy tengelyes v-type vezérlőhöz melyik a legjobb motor választás?
Én erre gondoltam:
http://cnc4you.co.uk/resources/60BYGH301B.PDF
Ezt is kitudná úgy hajtani mint a 2,1 Nm-es kissebb tesóját?
Ismeritek ezt a motort? Jó?
Válaszokat előre is köszönöm.
Lenne egy olyan kérdésem, hogy a négy tengelyes v-type vezérlőhöz melyik a legjobb motor választás?
Én erre gondoltam:
http://cnc4you.co.uk/resources/60BYGH301B.PDF
Ezt is kitudná úgy hajtani mint a 2,1 Nm-es kissebb tesóját?
Ismeritek ezt a motort? Jó?
Válaszokat előre is köszönöm.
Cím: Re:Léptetőmotor
Írta: adamant Dátum 2013 január 16, 21:18
Írta: adamant Dátum 2013 január 16, 21:18
Tiszteletem!
Na ez egy izgi téma lassan elkészülő gépemet én is egy ilyen vezérlővel szeretném mozgatni de ahogy ragad rám az infó a koszon kívül azt kezdem tapasztalni, hogy ez a vezérlő egy zsákutca de a kérdésem az lenne hogy egy ilyen vezérlővel előrébb lennék mondjuk ez vagy ez is felejtős és valami komolyabb kellene ha valami értelmeset akarok össze hozni (tudom vegyek szervot, de még most jó nekem a léptecs is)
valaki tudna mondani valami példát ami nem túl drága?
Cím: Re:Léptetőmotor
Írta: Révész Richárd Dátum 2013 január 16, 21:31
Írta: Révész Richárd Dátum 2013 január 16, 21:31
Ez a motor egy kicsit nagyocska ha párhuzamos kötésben akarod hajtani.Ilyenkor 4.2A kéne neki, a vezérlő viszont csak 3A tud.
Ha soros kötésben használod akkor a vezérlő ki tudja szolgálni elég árammal, cserébe gyengébben fog muzsikálni a motor.
Egyébként pont ma kaptam egy ilyen motort, én is kíváncsi vagyok mit tud.
Ha soros kötésben használod akkor a vezérlő ki tudja szolgálni elég árammal, cserébe gyengébben fog muzsikálni a motor.
Egyébként pont ma kaptam egy ilyen motort, én is kíváncsi vagyok mit tud.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 16, 21:37
Írta: 000000000 Dátum 2013 január 16, 21:37
Kitudnád fejteni részletesebben, hogyan fordulhat elő az, hogy egy léptetőmotor két lépés között álljon meg.
Itt mikrolépésre vagy fizikai felbontásra gondolsz?
Van valami mód arra, hogy ezt a hibát kivédjük? Ha nincs, akkor elég kétségbeejtő a helyzet, mert akkor léptetővel nem is lehet pontos mozgatórendszert építeni.
Itt mikrolépésre vagy fizikai felbontásra gondolsz?
Van valami mód arra, hogy ezt a hibát kivédjük? Ha nincs, akkor elég kétségbeejtő a helyzet, mert akkor léptetővel nem is lehet pontos mozgatórendszert építeni.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2013 január 16, 21:44
Írta: jv7pu3a5p Dátum 2013 január 16, 21:44
Nem fogja tudni rendesen meghajtani. Barátom gépén ez a konfig van és gondok vannak vele. Most gyűjt MSDD vezérlőre inkább.
Cím: Re:Léptetőmotor
Írta: Révész Richárd Dátum 2013 január 16, 21:46
Írta: Révész Richárd Dátum 2013 január 16, 21:46
Valaki régebben már mutatott ilyen vezérlőt.Nagyon hasonlít az MSD vezérlőkre.Lehet többet ér mint a V-type.
Próba szerencse.
Majd jön valaki aki látott már ilyet és mond véleményt.
Ne becsüld le a léptetőt, szervoból is ha jót akarsz akkor gyári AC.
Próba szerencse.
Majd jön valaki aki látott már ilyet és mond véleményt.
Ne becsüld le a léptetőt, szervoból is ha jót akarsz akkor gyári AC.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2013 január 16, 21:58
Írta: jv7pu3a5p Dátum 2013 január 16, 21:58
Nem teljesen értek egyet Servo írásával.
Mikrolépésre gondolt, amikor két lépés között tartja az elektronika a motort. Valóban instabilabb helyzet, ezért is két egész lépés között kisebb a tartónyomaték. De azért a jó vezérlők, szépen, hiba nélkül tudják hajtani őket.
Mikrolépésre gondolt, amikor két lépés között tartja az elektronika a motort. Valóban instabilabb helyzet, ezért is két egész lépés között kisebb a tartónyomaték. De azért a jó vezérlők, szépen, hiba nélkül tudják hajtani őket.
Cím: Re:Léptetőmotor
Írta: zotykó Dátum 2013 január 16, 23:31
Írta: zotykó Dátum 2013 január 16, 23:31
A TB6560-nál ki tudod iktatni azt, hogy pihenéskor vissza vegye a tartóáramot. Ilyenkor mindjárt sokat tettél az átbillenés ellen. Ha meg nem használsz olyan nagy menetemelkedésű orsót, akkor ez még csökkenthető.
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2013 január 17, 03:26
Írta: B.Zoltán Dátum 2013 január 17, 03:26
2M542-N vezérlővel egy 3.1Nm motor sokkal nagyobb nyomatékot és fordulatot tud, mint TB6560-as ic-vel ugyan olyan áram mellett is.
Saját tapasztalatból mondom.
Saját tapasztalatból mondom.
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2013 január 17, 03:36
Írta: B.Zoltán Dátum 2013 január 17, 03:36
A 2M542-N vezérlő tesztjéről bővebben a 3324 és a 3328 között találsz.
Cím: Re:Léptetőmotor
Írta: adamant Dátum 2013 január 17, 10:48
Írta: adamant Dátum 2013 január 17, 10:48
Van az MSD és a MSDD kettő között mi a különbség azon kívül hogy az utóbbi digitális? A motornál jóval nagyon teljesítmény növekedés lép fel vagy gyorsabb vagy pontosabb? Mondjuk lenne egy 3Nm motor arra elég a kisebb(MSDD-40-3.2) vezérlő is de ha nagyobbat(MSDD-80-5.6) kötöm rá akkor jobb teljesítményt érhetek el?
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2013 január 17, 11:46
Írta: jv7pu3a5p Dátum 2013 január 17, 11:46
Az MSDD kicsit más elven vezérli a léptecset, ezáltal jobb eredményt ér el magasabb fordulatszámoknál.
Jóval csendesebben járnak a motorok, van lehetőseg rezonancia pontok kiszűrésére a PC-s programjával.
Illetve nem is melegednek annyira a motorok, jóval optimálisabban tekeri őket.
Szerintem egy 3Nm motorhoz elegendő egy MSDD50-5.6 (nekem is ez van) de, ha még stabilabban akarod tekerni őket magasabb fordulaton is akkor kell a 80V-os vezérlő.
Na persze a motorról nem ártana több adat...
Jóval csendesebben járnak a motorok, van lehetőseg rezonancia pontok kiszűrésére a PC-s programjával.
Illetve nem is melegednek annyira a motorok, jóval optimálisabban tekeri őket.
Szerintem egy 3Nm motorhoz elegendő egy MSDD50-5.6 (nekem is ez van) de, ha még stabilabban akarod tekerni őket magasabb fordulaton is akkor kell a 80V-os vezérlő.
Na persze a motorról nem ártana több adat...
Cím: Re:Léptetőmotor
Írta: adamant Dátum 2013 január 17, 15:29
Írta: adamant Dátum 2013 január 17, 15:29
Sajna csak ennyit tudok a motorról
Nema23
Lépés: 1,8
Áram: 3A
Nyomaték: 3Nm
Súlya: 1,55kg
Hossza: 115mm
Kivezetés: 4 vezeték
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 17, 15:50
Írta: 000000000 Dátum 2013 január 17, 15:50
Fasza kis motor ez!
Egyetértek LZ-vel, elég az 50V-os vezérlő.
Egyetértek LZ-vel, elég az 50V-os vezérlő.
Cím: Re:Léptetőmotor
Írta: 946ywdygt Dátum 2013 január 17, 17:19
Írta: 946ywdygt Dátum 2013 január 17, 17:19
Sziasztok.
Köszönöm mindenkinek a válaszát.
Azt mmég megszeretném kérdezni, hogy ehez a kínai vezérlőhöz melyik a legjobb léptetőmotor választás?
A vezérlő már megvan, nemsokára énis beleszeretnék kezdeni egy masina építésébe ezért lenne szükségem a segítségetekre. (a továbbiakban is)
Ehez hasonlóban gondolkodom.:
http://www.usinages.com/discussions-generales-conception/presentation-cnc-besoin-vos-lumiere-t48781.html
Köszönöm.
Köszönöm mindenkinek a válaszát.
Azt mmég megszeretném kérdezni, hogy ehez a kínai vezérlőhöz melyik a legjobb léptetőmotor választás?
A vezérlő már megvan, nemsokára énis beleszeretnék kezdeni egy masina építésébe ezért lenne szükségem a segítségetekre. (a továbbiakban is)
Ehez hasonlóban gondolkodom.:
http://www.usinages.com/discussions-generales-conception/presentation-cnc-besoin-vos-lumiere-t48781.html
Köszönöm.
Cím: Re:Léptetőmotor
Írta: sunraw Dátum 2013 január 17, 17:45
Írta: sunraw Dátum 2013 január 17, 17:45
Sziasztok!
Ezt a csini motrot kellene bekötnöm egy 4 vezetékes vezérlőbe, de sajna egy vezetékkel több van. Megoldható?

Ezt a csini motrot kellene bekötnöm egy 4 vezetékes vezérlőbe, de sajna egy vezetékkel több van. Megoldható?
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2013 január 17, 19:43
Írta: jv7pu3a5p Dátum 2013 január 17, 19:43
3 Amper, hmm. Érdekes, én lemérném, hogy tényleg tudja-e a 3Nm-t 3A esetén.
Ha elhozod szívesen megpörgetem neked az MSDD-vel.
Írj emilt ha érdekel.
Ha elhozod szívesen megpörgetem neked az MSDD-vel.
Írj emilt ha érdekel.
Cím: Re:Léptetőmotor
Írta: adamant Dátum 2013 január 17, 19:57
Írta: adamant Dátum 2013 január 17, 19:57
Ment PÜ-et!
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2013 január 17, 22:41
Írta: ANTAL GÁBOR Dátum 2013 január 17, 22:41
Vágjál le egyet és csak négy lesz !
de félre a tréfával
http://zeus.nyf.hu/~elat/Elir1/A%20leptetomotorok.doc
Vagyis az egy olyan unipoláris ahol a középmegcsapolások közösítve vannak
de félre a tréfával
http://zeus.nyf.hu/~elat/Elir1/A%20leptetomotorok.doc
Vagyis az egy olyan unipoláris ahol a középmegcsapolások közösítve vannak
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2013 január 17, 22:57
Írta: besirkyjh Dátum 2013 január 17, 22:57
Szia
Meg se probáld mert a tekercsek közösitve vannak és egyböl tönkre teszi a vezérlödet .
Bipolárisba csak 8 - 6 és 4 vezetékest lehet használni .Esetleg meg lehet probálni belül ( csak a fedlapot leszedve ) szét bontani akár 8 vezetékesre is és akkor tudod használni márminek ( uni és bipolban is ) !
Meg se probáld mert a tekercsek közösitve vannak és egyböl tönkre teszi a vezérlödet .
Bipolárisba csak 8 - 6 és 4 vezetékest lehet használni .Esetleg meg lehet probálni belül ( csak a fedlapot leszedve ) szét bontani akár 8 vezetékesre is és akkor tudod használni márminek ( uni és bipolban is ) !
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2013 január 17, 23:17
Írta: jani300 Dátum 2013 január 17, 23:17
Jó estét ! Érdeklődnék a 3711-ben mutatott motor hány Nm-es lehet ?
Cím: Re:Léptetőmotor
Írta: tiggersoft Dátum 2013 január 18, 00:16
Írta: tiggersoft Dátum 2013 január 18, 00:16
Ez a család(103-770-xxx) 0.6Nm körül van párhuzamos bipol-ban.
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2013 január 18, 18:12
Írta: jani300 Dátum 2013 január 18, 18:12
Köszönöm !
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 18, 19:16
Írta: 000000000 Dátum 2013 január 18, 19:16
Te nem tapasztaltál lépéstévesztést a nem hamisított TB6560AHQ-nál eddig soha? Vagy nem is ellenőrizted ilyen szempontból?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2013 január 18, 19:40
Írta: besirkyjh Dátum 2013 január 18, 19:40
Szia Tibor
Megmondom öszintén hogy nem igazán figyeltem rá ilyen szempontbol ahogy Te .
Törekszem a mechanikus felbontásra igy féllépésnél sosem használok többet .Mikro stepnél elképzelhetönek tartom hogy kavarodás van benne , sött a pihentetés is tud bajt csinálni ( tapasztaltam már ) .A legutobbi tapasztalatom az hogy egy "probapanelban cserélgetve az IC-ket akár 30%-is lehet az eltérés a tartoáramban ( ugyanazokkal a paraméterekkel és beállitásokkal ) .Semmin nem csodálkozom ezzel az IC-vel de még mindig azt mondom hogy jo használhato kisebb költségvetésü gépekhez .
Tudomásom szerint a Toshiba kb 2-3 éve le vette a gyártmányai közül ( gondolom ilyesmi oka lehetett rá , tul sok volt már a másod termék ) .Ettöl függetlenül nincsenek veke rosz tapasztalataim .
Te milyen okbol kerültél a közelébe ? Pusztán tesztelési céllal ?
Megmondom öszintén hogy nem igazán figyeltem rá ilyen szempontbol ahogy Te .
Törekszem a mechanikus felbontásra igy féllépésnél sosem használok többet .Mikro stepnél elképzelhetönek tartom hogy kavarodás van benne , sött a pihentetés is tud bajt csinálni ( tapasztaltam már ) .A legutobbi tapasztalatom az hogy egy "probapanelban cserélgetve az IC-ket akár 30%-is lehet az eltérés a tartoáramban ( ugyanazokkal a paraméterekkel és beállitásokkal ) .Semmin nem csodálkozom ezzel az IC-vel de még mindig azt mondom hogy jo használhato kisebb költségvetésü gépekhez .
Tudomásom szerint a Toshiba kb 2-3 éve le vette a gyártmányai közül ( gondolom ilyesmi oka lehetett rá , tul sok volt már a másod termék ) .Ettöl függetlenül nincsenek veke rosz tapasztalataim .
Te milyen okbol kerültél a közelébe ? Pusztán tesztelési céllal ?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 18, 20:14
Írta: 000000000 Dátum 2013 január 18, 20:14
A kontakt tapintós digitalizálónál jöt elő (régebben isn gyanús volt már pár esetben), amikor a Z tengelyt ezzel az IC-s hajtással próbáltam működtetni. Elég volt neki gyakran fél perc, és már a 17-es lábra kötött HOME LED jelzése nem stimmel, azaz az IC eltéved a pozíciók között.
A féllépésedet nem értem, az nagyon "szétrázza" a mechanikát, "eszi" a golyósorsót, stb... Sokkal csendesebb, rezonancia mentesebb egy stephajtás, egységugrás teszteket is jobban teljesít (azaz jobb a dinamikája), ha negyed vagy nyolcad lépéses mikrolépéses üzemmódban hajtod a motorokat.
A féllépésedet nem értem, az nagyon "szétrázza" a mechanikát, "eszi" a golyósorsót, stb... Sokkal csendesebb, rezonancia mentesebb egy stephajtás, egységugrás teszteket is jobban teljesít (azaz jobb a dinamikája), ha negyed vagy nyolcad lépéses mikrolépéses üzemmódban hajtod a motorokat.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2013 január 18, 21:29
Írta: s7manbs8 Dátum 2013 január 18, 21:29
NA, de a 3 tengelyes vezérlőkkel mi van akkor, amiben ilyenek vannak ? Azok meg jók ? Nem tévesztenek lépést ?
Cím: Re:Léptetőmotor
Írta: LittleSV Dátum 2013 január 18, 22:07
Írta: LittleSV Dátum 2013 január 18, 22:07
Dehogynem... Bár az is lehet nekem a motorok túl nagyok a vezérlőhöz.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2013 január 18, 22:51
Írta: besirkyjh Dátum 2013 január 18, 22:51
KIs emelkedésü orsokat vagy fogaslécet használok .A kicsiknél direkt hajtás de a fogaslécnél már jocskán áttételezve lefelé .
Olyat viszont láttam sokat hogy mikrostepnél kihagyott vagy 3 lépést de utánna ugyrott hármat és men t tovább . Mi van ha ilyenkor vált irányt a tengely vagy a léptetö ?Ezek hiányozni fognak belöle nem ?Lehet innen ered a mérés eredményed is ?
Csendesebbnek csendesebb az igaz de én szeretem a hangját .Nem találtam még problémásnak a féllépésböl adodo " szétrázást" , nem látszik a mart felületen sem ( ha egyre gondolunk ) .Olyan helyre ahol tényleges követelmény a rezonancia mentesség és golyosorso az " egységugrás " nem teszek ilyen vezérlöket az már egy más kategoria .
Olyat viszont láttam sokat hogy mikrostepnél kihagyott vagy 3 lépést de utánna ugyrott hármat és men t tovább . Mi van ha ilyenkor vált irányt a tengely vagy a léptetö ?Ezek hiányozni fognak belöle nem ?Lehet innen ered a mérés eredményed is ?
Csendesebbnek csendesebb az igaz de én szeretem a hangját .Nem találtam még problémásnak a féllépésböl adodo " szétrázást" , nem látszik a mart felületen sem ( ha egyre gondolunk ) .Olyan helyre ahol tényleges követelmény a rezonancia mentesség és golyosorso az " egységugrás " nem teszek ilyen vezérlöket az már egy más kategoria .
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2013 január 18, 22:57
Írta: besirkyjh Dátum 2013 január 18, 22:57
Elvilleg az Ic ugyan az bennük is sött a kapcsolás is meg egyezik 90%-ban , igy azokban is fellelhetö ez a " hiba " .Ilyenkor érdemes kicsit elgondolkodni azon hogy mire is vásárolják az emberek ezeket a gépeket és akkor nem csoda hogy sok esetben nem is figyelnek ezekre a dolgokra , ezek ilyenek és a feladatra jok is .Logikusan ha valaki "komolyabbat " akar akkor épitsen jobb minöségü vezérlöt a gépébe vagy épitsen szervot ( persze ez sem oldja meg minden problémáját ) .
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 23, 21:19
Írta: istvan58 Dátum 2013 január 23, 21:19
Sziasztok,
mérte e már valaki a léptetőmotor tartónyomatékát, és ha igen hogyan?
én most próbáltam egy 4Nm-es motort ugy hogy MSDD meghajtóra kötve bealitva a 4A peak, enyit ir a motorra, idle current 100-on...és sulyt akasztottam egy vizszintes erőkarra. Növeltem a kar hosszát amig elindul a motor. Kb 2,7Nm-t mertem.....nos hogy van ez?
Ez a motorom :
Motor
mérte e már valaki a léptetőmotor tartónyomatékát, és ha igen hogyan?
én most próbáltam egy 4Nm-es motort ugy hogy MSDD meghajtóra kötve bealitva a 4A peak, enyit ir a motorra, idle current 100-on...és sulyt akasztottam egy vizszintes erőkarra. Növeltem a kar hosszát amig elindul a motor. Kb 2,7Nm-t mertem.....nos hogy van ez?
Ez a motorom :
Motor
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 23, 21:53
Írta: istvan58 Dátum 2013 január 23, 21:53
Cím: Re:Léptetőmotor
Írta: xkbv3nx0d Dátum 2013 január 23, 22:00
Írta: xkbv3nx0d Dátum 2013 január 23, 22:00
az hogy lehet hasonló motor 4,2A peak 3.1Nm adatlap szerint... szerintem ez sem lehet 4Nm
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 23, 22:02
Írta: istvan58 Dátum 2013 január 23, 22:02
A megadott link-rõl vásároltam a motort
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 23, 22:05
Írta: istvan58 Dátum 2013 január 23, 22:05
Ha 5.6A peak-et állitok be, vagyis 4A RMS akkor megvan a 4Nm. (2 literes vizes flakon 20cm)
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 23, 22:08
Írta: istvan58 Dátum 2013 január 23, 22:08
Lehet hogy a specko az egyenarammal van mérve és akkor az rms a jo?
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 23, 22:52
Írta: istvan58 Dátum 2013 január 23, 22:52
Látom senki nek szál be, akkor válaszolok saját magamnak [#smile]
ha mindkét fázisra kötök 4A dc-t akkor megvan a 4Nm. Már csak az a kérdés hogy helyes e igy mérni???
ha mindkét fázisra kötök 4A dc-t akkor megvan a 4Nm. Már csak az a kérdés hogy helyes e igy mérni???
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 24, 06:50
Írta: 000000000 Dátum 2013 január 24, 06:50
Helyes, de csak abban az esetben ha egész lépésben (1 step=1.8 mm) hajtod a vezérlőddel a léptetőmotort. Ha áttérsz 1/2, 1/4, 1/8, .... mikrostep üzemmódokba, akkor a motor két tekercse már soha nem fogja megkapni a maximális áramot egy időpontban. Emiatt aztán lecsökken a tartónyomatéka.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 24, 06:51
Írta: 000000000 Dátum 2013 január 24, 06:51
elírtam, így helyes: (1 step=1.8 fok)
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 10:01
Írta: istvan58 Dátum 2013 január 24, 10:01
Dc-ben mértem, ha egy fázison van áram akkor 2.7Nm, ha mindketton 4A dc akkor megvan a 4Nm, de igy értelemszerüen a pólusok között áll.
Meghajtóra kötve csak 5.6A peak árammal van meg a 4Nm.
Meghajtóra kötve csak 5.6A peak árammal van meg a 4Nm.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2013 január 24, 12:54
Írta: svejk Dátum 2013 január 24, 12:54
A két tekercs estén elvileg gyök kettő szeresének kell lennie a nyomatéknak.
Az eredeti egész lépésnél mindig csak 1 tekercs kap áramot, ezt módosították úgy, hogy egyszerre mindig kettő. Ez kisebb rezonanciával jár.
A mérésnek ne tulajdoníts túl nagy szerepet, valószínű úgysem fogod ezen az áramon merni járatni, mert érzésed szerint nagyon forró lesz.
Azt hogy az MSD mit ért a csúcs áramon, az meg a tervezők titka marad meglehet.
Addig növeld az áramot, amíg nem lesz durva hangja, (a túlgerjesztett vas is korai lépésvesztést okoz), illetve még elfogadható lesz számodra a motor hőmérséklete.
Az eredeti egész lépésnél mindig csak 1 tekercs kap áramot, ezt módosították úgy, hogy egyszerre mindig kettő. Ez kisebb rezonanciával jár.
A mérésnek ne tulajdoníts túl nagy szerepet, valószínű úgysem fogod ezen az áramon merni járatni, mert érzésed szerint nagyon forró lesz.
Azt hogy az MSD mit ért a csúcs áramon, az meg a tervezők titka marad meglehet.
Addig növeld az áramot, amíg nem lesz durva hangja, (a túlgerjesztett vas is korai lépésvesztést okoz), illetve még elfogadható lesz számodra a motor hőmérséklete.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 13:35
Írta: istvan58 Dátum 2013 január 24, 13:35
köszi,
én csak arra voltam kiváncsi hogy a gyártók hogyan definiálják a "holdind torque"-et
Egy helyen olvastam hogy "Holding torque is the torque that motor can hold when all the coils are energized with the nominal current" Ebböl azt értem hogy mindkét fázison 4A.Csak az nem világos hogy peak vagy rms-röl szól, végül is 4A dc-vel vagy 5,6A peak az MSDD-n. (ilyenkor mértem 4A rms-t fázisonként) teljesiti a 4Nm taró nyomtékot. 2 literes vizes flakon 20 cm erőkaron mozditja meg a motort
én csak arra voltam kiváncsi hogy a gyártók hogyan definiálják a "holdind torque"-et
Egy helyen olvastam hogy "Holding torque is the torque that motor can hold when all the coils are energized with the nominal current" Ebböl azt értem hogy mindkét fázison 4A.Csak az nem világos hogy peak vagy rms-röl szól, végül is 4A dc-vel vagy 5,6A peak az MSDD-n. (ilyenkor mértem 4A rms-t fázisonként) teljesiti a 4Nm taró nyomtékot. 2 literes vizes flakon 20 cm erőkaron mozditja meg a motort
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 24, 14:43
Írta: 000000000 Dátum 2013 január 24, 14:43
Egyébként inkább azt javasolnám, hogy arra koncentrálj, hogy a teljes hajtásod gyorsulás optimumra legyen méretezve léptető motor specifikusan, és akkor legyen még nyomaték a motorodba amikor forog is maximális sebességgel (ökölszabály: 10-15 1/s fordulat fölé nem érdemes hajszolni már egy pár Nm-es léptető motort). Ugyanis ha áll, nem annyira lényeges, hogy pont akkor a legerősebb. Ha dinamikusabb mozgáskor se téveszt lépést, na az sokkal fontosabb.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 14:52
Írta: istvan58 Dátum 2013 január 24, 14:52
ez mind ok,
mint mondom csak egyszerüen kiváncsi voltam hogyan definiálja a gyártó a "holding torque"-t.
mint mondom csak egyszerüen kiváncsi voltam hogyan definiálja a gyártó a "holding torque"-t.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 24, 15:06
Írta: 000000000 Dátum 2013 január 24, 15:06
Tibor!
Mit jelent a / jel előtt az egyes?
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 15:45
Írta: istvan58 Dátum 2013 január 24, 15:45
igy jelölik a fordulat/sec -ot
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 24, 15:58
Írta: 000000000 Dátum 2013 január 24, 15:58
Köszi!
Akkor az nem egyes.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 16:02
Írta: istvan58 Dátum 2013 január 24, 16:02
de igen...igy jelölik
http://hu.wikipedia.org/wiki/Percenk%C3%A9nti_fordulatsz%C3%A1m
http://hu.wikipedia.org/wiki/Percenk%C3%A9nti_fordulatsz%C3%A1m
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 16:09
Írta: istvan58 Dátum 2013 január 24, 16:09
akkor most részemröl kezd a dolog tisztulni, végül is ugy mértem 4Nm tartó nyomatékot ha mindkét fázisra addtam 4A dc-t...valószinü igy definiálja a gyártó is. Rákérdeztem egy gyártónál, várom a választ.
addig is amig megyitom az "épül a gépem" topikot megkérdezném hogy szerintetek mit tud ez a motor produkálni egy 5mm emelkedésü orsóval,direkt hajtásal, esetleg fém megmunkálásra használható e?
mégegyszer a motor :
Motor
addig is amig megyitom az "épül a gépem" topikot megkérdezném hogy szerintetek mit tud ez a motor produkálni egy 5mm emelkedésü orsóval,direkt hajtásal, esetleg fém megmunkálásra használható e?
mégegyszer a motor :
Motor
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 24, 16:11
Írta: 000000000 Dátum 2013 január 24, 16:11
Ez igen! Így már más.
Persze, szerintem, itt célszerűbb lenne az általam, és mindenki által ismert f/p használata.
Mivel, itt sokan vagyunk, sok félék.
Jó, ha közérthetően beszélünk.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 16:15
Írta: istvan58 Dátum 2013 január 24, 16:15
szerintem is érthetőbb az f/s csak gondolom az 1/s minden nyelven jó
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 24, 16:16
Írta: 000000000 Dátum 2013 január 24, 16:16
Kb, 4 ezer körüli előtolást tudsz elérni 16-20/5 mm átmérőjű orsóval.
A fém, megmunkálás, főleg a gépvázon fog múlni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 24, 16:21
Írta: 000000000 Dátum 2013 január 24, 16:21
A gyári, fémipari CNC –m max 2500 előtolásra van állítva. Nagyon, nagyon ritkán használom ezen a sebességen.
1000 – 1500 az átlagos.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 16:22
Írta: istvan58 Dátum 2013 január 24, 16:22
a vázat azt kb 500kg toló eröre tervezem, tehát szerinted ez a motor meg az MSDD 50-5.6 meghajtó az ok lesz?
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 16:23
Írta: istvan58 Dátum 2013 január 24, 16:23
2500 mi? mm/perc??
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 24, 16:25
Írta: 000000000 Dátum 2013 január 24, 16:25
Bocs!
Igen.
Igen.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 16:26
Írta: istvan58 Dátum 2013 január 24, 16:26
hát nekem jó az 500-800 mm/ perc is, gyors pozicionálásnál jó ha lessz 2500
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 24, 16:27
Írta: 000000000 Dátum 2013 január 24, 16:27
Elméletileg jó. De, én, inkább egyel nagyobb vezérlőt raknék hozzá.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 24, 16:27
Írta: 000000000 Dátum 2013 január 24, 16:27
Munkaterület függő.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 16:27
Írta: istvan58 Dátum 2013 január 24, 16:27
csak arra vagyok kiváncsi ki mit hozot ki egy ekkora motorból direkt hajtásal
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 16:31
Írta: istvan58 Dátum 2013 január 24, 16:31
a 80 voltosra gondolsz? nézd, az árram az megvan, legfeljebb nem lessz anyira gyors. na és már megvannak a vezérlők. DM556_V2.0, elvileg azonos az MSDD-50-5.6-al csak ehhez már a Protuner 2.0 kell.
Cím: Re:Léptetőmotor
Írta: sunraw Dátum 2013 január 24, 16:33
Írta: sunraw Dátum 2013 január 24, 16:33
Sziasztok!
Erről a motorról szeretnék kérdezni.

Nyomaték és bekötés érdekelne.
Ha valaki tudna segíteni, azt megköszönném.
Erről a motorról szeretnék kérdezni.
Nyomaték és bekötés érdekelne.
Ha valaki tudna segíteni, azt megköszönném.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 24, 16:34
Írta: 000000000 Dátum 2013 január 24, 16:34
Ahogy lentebb írtam. Átlagos hobby gépen 4 -4500 elérhető.
De, azt tudnod kell, hogy a végsebesség nem minden. A dinamika, általában lényegesebb.
Tibor is erre célzott. Ha, fémbe is gondolkodol, akkor. És nem nagy munkaterületbe, akkor célszerű lenne a felezőhöz közeli áttétel.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 24, 16:40
Írta: 000000000 Dátum 2013 január 24, 16:40
Igen, a 80 v –osra. De, ha már megvan.
Mi az a protuner?
És, minek az?
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 16:51
Írta: istvan58 Dátum 2013 január 24, 16:51
a digitális vezérlőket lehet velle programozni,
http://www.leadshine.com/UploadFile/Down/DM556m.pdf
15. oldal
http://www.leadshine.com/UploadFile/Down/DM556m.pdf
15. oldal
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2013 január 24, 16:53
Írta: jv7pu3a5p Dátum 2013 január 24, 16:53
Szerintem, ha megvannak a gép paraméterei kérd meg Tibort számoljon neked egy ideális orsó emelkedést. Ha neked is ilyen 20kg közelében lesz a mozgatott tömeged, akkor optimálisabb lesz a 10es emelkedésű orsó mint nekem is.
De ez soktényezős.
Kellenek a számoláshoz:
- mozgatott tömeg
- orsó hossz/átmérő
- motor adatok
De ez soktényezős.
Kellenek a számoláshoz:
- mozgatott tömeg
- orsó hossz/átmérő
- motor adatok
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 17:00
Írta: istvan58 Dátum 2013 január 24, 17:00
orsó is megvan, 5mm-es
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2013 január 24, 17:04
Írta: jv7pu3a5p Dátum 2013 január 24, 17:04
Kár...
Akkor, ahogy Danibá is írta 4000 mm/p biztos nem fogod tudni meghaladni ezzel a motorral biztonságosan.
NA persze ehhez kelleni fog egy könnyen járó mechanika is.
Tervek? Elképzelés?
Akkor, ahogy Danibá is írta 4000 mm/p biztos nem fogod tudni meghaladni ezzel a motorral biztonságosan.
NA persze ehhez kelleni fog egy könnyen járó mechanika is.
Tervek? Elképzelés?
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 17:08
Írta: istvan58 Dátum 2013 január 24, 17:08
most keszül...mint mondtam nekem elég az 1000 mm/p
te milyen motorokat használsz?
te milyen motorokat használsz?
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2013 január 24, 17:14
Írta: Rabb Ferenc Dátum 2013 január 24, 17:14
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2013 január 24, 17:15
Írta: jv7pu3a5p Dátum 2013 január 24, 17:15
Tiednél kisebb, 3.1Nm-es.
MSDD50-5.6 vezérlők.
MSDD50-5.6 vezérlők.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 17:18
Írta: istvan58 Dátum 2013 január 24, 17:18
akkor remélem jók lesznek ezek is
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 24, 17:18
Írta: 000000000 Dátum 2013 január 24, 17:18
Az, úgy van, ha viszonylag sok Z mozgásra számítasz, és/vagy kicsi munkaterületre.
Akkor, mindenképp a dinamikát kell előtérbe helyezni. Itt nincs értelme sebességet hajszolni. Sőt …
Ha, sok egyenes mozgásra, és/vagy nagy munkaterületre. Akkor érdekes a nagy sebesség.
Ezért, fontos kiinduló pont a gép méret, és megmunkálási cél. A hajtás meghatározásakor.
De, ugye, ha már megvan a cucc, akkor azzal kell balancírozni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 24, 17:27
Írta: 000000000 Dátum 2013 január 24, 17:27
Neked, nagyon hasznos lenne egy csökkentő áttétel. 2:1 vagy 1,5:1 arányba.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 24, 17:29
Írta: 000000000 Dátum 2013 január 24, 17:29
Hány Amperes a motorod?
Mert, ebből van többféle.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 17:48
Írta: istvan58 Dátum 2013 január 24, 17:48
azért lehett megpróbálom direktben mit tud, de még messze a váz. Linearok megvannak, most agyalok a vázon. valami ilyesmit akarok.
Gép
Gép
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 24, 18:04
Írta: 000000000 Dátum 2013 január 24, 18:04
Na, ez még az a méret ahol, nincs túl nagy jelentősége az üresjárati sebességnek.
A dinamikus mozgásnak viszont igen.
Persze, fog működni 1-1 ben is. De, ezen a ponton már nem ugyanarról beszélünk.
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2013 január 24, 18:05
Írta: jv7pu3a5p Dátum 2013 január 24, 18:05
NEMA23-as 8 vezetékes párhuzamosan kötve 4.2A.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 18:10
Írta: istvan58 Dátum 2013 január 24, 18:10
a méret kissé nagyobb lesz, 800x600mm a terv
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 24, 18:13
Írta: 000000000 Dátum 2013 január 24, 18:13
Igen, ettől tartottam. A 4,2 A.
Így már nem annyira jó a vezérlő, motor, párosítás.
Érzékelhetően jobb lenne a 80 voltos vezérlővel.
Vagy a kisseb áram igényű motorral, ez a vezérlő.
Persze, fog működni, rendesen. De, a különbséget, próba után látnád.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 24, 18:17
Írta: 000000000 Dátum 2013 január 24, 18:17
Na, ez a méret már határeset. Ennél már, inkább a végzendő munkák a meghatározóak.
Vegyes használatra, jó lesz az 1-1 is.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 18:26
Írta: istvan58 Dátum 2013 január 24, 18:26
a vezérlővel kapcsolatban, ha el tudom adni darabjét mondjuk 17-18 ezerért akkor lehet váltok 80V-osra
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2013 január 24, 18:29
Írta: jv7pu3a5p Dátum 2013 január 24, 18:29
Sajnos igazad van. Már én is rájöttem.
Viszont így is túlteljesít, nem tudom igazán azon a sebességen járatni amit tudna valójában, ahhoz már gyenge a mechanika. Szóval így nem vertem bele magam felesleges költségbe. :)
Viszont így is túlteljesít, nem tudom igazán azon a sebességen járatni amit tudna valójában, ahhoz már gyenge a mechanika. Szóval így nem vertem bele magam felesleges költségbe. :)
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 18:44
Írta: istvan58 Dátum 2013 január 24, 18:44
közben kicsit játszotam a vezérlővel és a motoral,
néztem skópal a fazisonkénti aromot és ugy Kb 50 f/p -ig türhető,feljebb rohamosan csökken. Ez 5mm-es orsókal 1500 mm/p..nekem ez jó lessz.
45 voltal tápáltam a meghajtót, 4 A-re állitva.
néztem skópal a fazisonkénti aromot és ugy Kb 50 f/p -ig türhető,feljebb rohamosan csökken. Ez 5mm-es orsókal 1500 mm/p..nekem ez jó lessz.
45 voltal tápáltam a meghajtót, 4 A-re állitva.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 18:46
Írta: istvan58 Dátum 2013 január 24, 18:46
Külömben simán pörög a motor 3600 f/p -ig, és még van ereje..
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 18:58
Írta: istvan58 Dátum 2013 január 24, 18:58
további eredmények:
4A beálitva, fordulatot növeltem amug az áram leesik 3A-re.
45V-tal elment 300f/p-ig
35V-tal 210f/p-ig
tehát 60-70 voltal valószinü elmenne ugy 500-600 ig. amig leesne az áram 3A-re.
4A beálitva, fordulatot növeltem amug az áram leesik 3A-re.
45V-tal elment 300f/p-ig
35V-tal 210f/p-ig
tehát 60-70 voltal valószinü elmenne ugy 500-600 ig. amig leesne az áram 3A-re.
Cím: Re:Léptetőmotor
Írta: adamant Dátum 2013 január 24, 19:12
Írta: adamant Dátum 2013 január 24, 19:12
Ha esetleg elpasszolnád gondolj rám [#worship][#worship]
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 21:01
Írta: istvan58 Dátum 2013 január 24, 21:01
irtam mailt
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2013 január 24, 22:06
Írta: svejk Dátum 2013 január 24, 22:06
Ne szórakozzatok már ezzel a mértékegységgel!
ford/perc, 1/min vagy 1/perc, de semmiképp sem f/p
ford/perc, 1/min vagy 1/perc, de semmiképp sem f/p
Cím: Re:Léptetőmotor
Írta: Sz.József Dátum 2013 január 24, 23:12
Írta: Sz.József Dátum 2013 január 24, 23:12
Azt a terem-buráját neki... [#smile]
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 24, 23:14
Írta: istvan58 Dátum 2013 január 24, 23:14
http://hu.wikipedia.org/wiki/Percenk%C3%A9nti_fordulatsz%C3%A1m
Cím: Re:Léptetőmotor
Írta: mxjj54gxi Dátum 2013 január 25, 09:16
Írta: mxjj54gxi Dátum 2013 január 25, 09:16
Ezzel a cikkel nagyon alapvető problémám van, attól még, hogy a wikipédiában szerepel, nem feltétlen tartalmaz valódi okosságot.
Eleve ott kezdődik, hogy az idő SI mértékegysége nem a perc, hanem a secundum.
Ezért is írt 1/s-t Tibor45.
Aztán a frekvenciát sem percre lebontva értékeljük SI mértékegységként, hanem másodpercre lebontva.
A cikkíró áttette percre, és a számítások szerint ki is jön az érték jóra, de ettől még az igazi SI mértékegység secundumban irandó, értendő, számolandó.
Az más kérdés, hogy meg van ENGEDVE a percben való számolás, mivel ez nagyon régen rögzült a népek körében.
Hasonlóan a liter használata is engedélyezett, de ettől még nem lesz SI mértékegység.
Az SI mértékyegységrendszer hatalmas előnye a régebben volt egyéb mértékegységrendszerekkel szemben, hogy önmagában teljesen koherens.
Ez azt jelenti, hogy minden számolásnál nemcsak a számokkal, hanem a mértékegységekkel is ugyanazokat a műveleteket kell elvégezni, így automatikusan kiadódnak a mértékegységek a végeredményhez is.
DE!
Ehhez az is kell, hogy ne legyenek mindenféle hasból elővett és megjegyzendő extra számok a képletekben, amikkel még műveleteket kelljen végezni, mint például a 60-as szám, ha perccel számolsz, és ami számokat nem szorzunk/osztunk stb. hozzá a mértékegységekhez.
Számolj másodperccel, és nem lesz extra szorzó, és ráadásul a mértékegység is jól jön ki.
A régi rendszerekben iszonyat idétlen számokat kellett megjegyezni egyes számításoknál pusztán azért, hogy a végeredmény a megfelelő értékre kijöjjön, és ez pusztán az inkoherencia miatt volt.
Eleve ott kezdődik, hogy az idő SI mértékegysége nem a perc, hanem a secundum.
Ezért is írt 1/s-t Tibor45.
Aztán a frekvenciát sem percre lebontva értékeljük SI mértékegységként, hanem másodpercre lebontva.
A cikkíró áttette percre, és a számítások szerint ki is jön az érték jóra, de ettől még az igazi SI mértékegység secundumban irandó, értendő, számolandó.
Az más kérdés, hogy meg van ENGEDVE a percben való számolás, mivel ez nagyon régen rögzült a népek körében.
Hasonlóan a liter használata is engedélyezett, de ettől még nem lesz SI mértékegység.
Az SI mértékyegységrendszer hatalmas előnye a régebben volt egyéb mértékegységrendszerekkel szemben, hogy önmagában teljesen koherens.
Ez azt jelenti, hogy minden számolásnál nemcsak a számokkal, hanem a mértékegységekkel is ugyanazokat a műveleteket kell elvégezni, így automatikusan kiadódnak a mértékegységek a végeredményhez is.
DE!
Ehhez az is kell, hogy ne legyenek mindenféle hasból elővett és megjegyzendő extra számok a képletekben, amikkel még műveleteket kelljen végezni, mint például a 60-as szám, ha perccel számolsz, és ami számokat nem szorzunk/osztunk stb. hozzá a mértékegységekhez.
Számolj másodperccel, és nem lesz extra szorzó, és ráadásul a mértékegység is jól jön ki.
A régi rendszerekben iszonyat idétlen számokat kellett megjegyezni egyes számításoknál pusztán azért, hogy a végeredmény a megfelelő értékre kijöjjön, és ez pusztán az inkoherencia miatt volt.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 25, 09:35
Írta: istvan58 Dátum 2013 január 25, 09:35
Kedves rferi, kár ezért a hosszú okfejtésért...
Természetesen elektromérnõk lévén ismerem az SI rendszert. A wikipedia linket csak danibá-nak hoztam fel először mert ő kérdezte mi az 1/s.
És zszerintem nem követünk el szentségtõrést ha f/s vagy f/p -t irunk.
De ugy látom egyesek arra használják ezt a fórumot hogy mással kötekedjenek.
Természetesen elektromérnõk lévén ismerem az SI rendszert. A wikipedia linket csak danibá-nak hoztam fel először mert ő kérdezte mi az 1/s.
És zszerintem nem követünk el szentségtõrést ha f/s vagy f/p -t irunk.
De ugy látom egyesek arra használják ezt a fórumot hogy mással kötekedjenek.
Cím: Re:Léptetőmotor
Írta: mxjj54gxi Dátum 2013 január 25, 09:41
Írta: mxjj54gxi Dátum 2013 január 25, 09:41
Nem kötekedésnek írtam.
És tényleg nem követünk el szentségtörést, hiszen megengedett a dolog, ezt sem mondtam.
Csak Svejk már ilyet írt:"ford/perc, 1/min vagy 1/perc, de semmiképp sem f/p"
ebben már nincs is benne az egzakt SI mértékegység!!!
Csak azért neked reflektáltam, mert te tettél be egy olyan cikket, amivel azért szerintem sok baj van e témában.
És tényleg nem követünk el szentségtörést, hiszen megengedett a dolog, ezt sem mondtam.
Csak Svejk már ilyet írt:"ford/perc, 1/min vagy 1/perc, de semmiképp sem f/p"
ebben már nincs is benne az egzakt SI mértékegység!!!
Csak azért neked reflektáltam, mert te tettél be egy olyan cikket, amivel azért szerintem sok baj van e témában.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 25, 10:51
Írta: istvan58 Dátum 2013 január 25, 10:51
[#worship]
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2013 január 25, 10:51
Írta: svejk Dátum 2013 január 25, 10:51
Ej, b@szki, ha mérnök vagy, akkor meg főleg ne!
Nem kötekedés, de közel 8 év alatt még senki nem használta itt ezt a f/p mértékegységet, de nézz meg bármilyen villanymotort, ott sem találsz ilyet. Tehát ne hozzunk már be a köztudatba olyat ami szinte nincs is.
Az hogy valaki nem tudja mit is jelent az 1/s ha fordulatszámról beszélünk,.... no mindegy.
Szóval inkább el kell neki magyarázni és nem átvenni a hülyeséget.
No de ugorjunk... mondta Pósalaky Úr.
Nem kötekedés, de közel 8 év alatt még senki nem használta itt ezt a f/p mértékegységet, de nézz meg bármilyen villanymotort, ott sem találsz ilyet. Tehát ne hozzunk már be a köztudatba olyat ami szinte nincs is.
Az hogy valaki nem tudja mit is jelent az 1/s ha fordulatszámról beszélünk,.... no mindegy.
Szóval inkább el kell neki magyarázni és nem átvenni a hülyeséget.
No de ugorjunk... mondta Pósalaky Úr.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2013 január 25, 11:15
Írta: keri Dátum 2013 január 25, 11:15
Kicsit nekem is furcsa volt, de a szövegkörnyezetből rájöttem miről van szó.
Gyakori hogy "régi" szakemberek valami régi mértékegység formátumot használnak, szóval svejk szerintem nyűgős volt szimplán, rferi meg teljesen korrekt ismertetőt írt kötekedés nélkül (úgy vélem)
Azonban ha egyértelműségre törekszel, tényleg célszerű adott társaságban megszokottat használni, vagy az eredeti SI mértékegység rendszert.
Fordulatszámot egyébként én is percenkénti fordulatra szoktam kihozni, mert mindenki úgy szokta meg az autóból, de számolás alatt többnyire körfrekvenciával számolok.
Gyakori hogy "régi" szakemberek valami régi mértékegység formátumot használnak, szóval svejk szerintem nyűgős volt szimplán, rferi meg teljesen korrekt ismertetőt írt kötekedés nélkül (úgy vélem)
Azonban ha egyértelműségre törekszel, tényleg célszerű adott társaságban megszokottat használni, vagy az eredeti SI mértékegység rendszert.
Fordulatszámot egyébként én is percenkénti fordulatra szoktam kihozni, mert mindenki úgy szokta meg az autóból, de számolás alatt többnyire körfrekvenciával számolok.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 25, 11:34
Írta: istvan58 Dátum 2013 január 25, 11:34
Bocsi srácok, én csak azt szerettem volna megtudni hogy hogyan definiálja a gyártó a léptető motor tartó nyomatékát és kaptam helyette egy mértékegységekrõl szóló oktatást
Köszönöm mindenkinek.[#worship][#worship][#worship]
Köszönöm mindenkinek.[#worship][#worship][#worship]
Cím: Re:Léptetőmotor
Írta: mxjj54gxi Dátum 2013 január 25, 11:41
Írta: mxjj54gxi Dátum 2013 január 25, 11:41
Egyet fizet, kettőt kap! :))))
DE reméljük, azért nem kaptál olyan sokkot, hogy eztán ignorálnád az oldalt! :))
DE reméljük, azért nem kaptál olyan sokkot, hogy eztán ignorálnád az oldalt! :))
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 25, 11:45
Írta: istvan58 Dátum 2013 január 25, 11:45
Sajnos az eredeti kérdésre nincs válasz!
Cím: Re:Léptetőmotor
Írta: mxjj54gxi Dátum 2013 január 25, 11:54
Írta: mxjj54gxi Dátum 2013 január 25, 11:54
Mért ne lenne: pont úgy, ahogy te mérted.
DC-vel értik, mindkét tekercsen.
Aztán, hogy ezt a klf vezérlők hogyan érik el, pvm-mel, vagy dc-vel, vagy bárhogy, az őket nem érdekli.
Tök logikus, hogy ha pwm-mel vezérled, akkor a pwm jel alatti területnek kell megfelelnie a DC áramértéknek, vagyis az RMS a lényeges, mivel csak az alkot mágneses mezőt, és tartja a rotort a helyén.A csúccsal nem tud mit kezdeni a moci, ha csak pillanatokig tart.
DC-vel értik, mindkét tekercsen.
Aztán, hogy ezt a klf vezérlők hogyan érik el, pvm-mel, vagy dc-vel, vagy bárhogy, az őket nem érdekli.
Tök logikus, hogy ha pwm-mel vezérled, akkor a pwm jel alatti területnek kell megfelelnie a DC áramértéknek, vagyis az RMS a lényeges, mivel csak az alkot mágneses mezőt, és tartja a rotort a helyén.A csúccsal nem tud mit kezdeni a moci, ha csak pillanatokig tart.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2013 január 25, 12:09
Írta: svejk Dátum 2013 január 25, 12:09
De hiszen olyan szépen levezetted magadnak!
Pár napon belül lehet megkapod ama gyártó hivatalos válaszát is.
Mi itt csak csekély értelmű kis emberek vagyunk. :( :))
Pár napon belül lehet megkapod ama gyártó hivatalos válaszát is.
Mi itt csak csekély értelmű kis emberek vagyunk. :( :))
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 25, 12:18
Írta: 000000000 Dátum 2013 január 25, 12:18
Egyesek, ezt is túl spirázták. Mint mostanában ezen a fórumon sok mindent.
Nehogy azt gondoljátok, nagy előrevivő volt a kötözködésetek.
A gyereket is lehet, úgy tanítani, ha nem tud valamit, jól nyakon vágom.
Vagy van a nehezebb módszer: Neki állok, és elmagyarázom.
Itt, inkább a lehülyézés a menő.
Én, se azt kérdeztem amit ………..
Hanem, azt szerettem volna, ha tiszta lesz mindenkinek, mi mit jelent.
Mert ugye a gépi l =L Na, és az 1=egyes. Az, tök ugyanúgy néz ki.
Mire gondoljon a nem értő?
De, valamiért, pont az, aki azt gondolja, ő terjeszti a világosságot, az vágja nyakon a gyereket.
Én, viszont azt gondolom, nekünk, mindanyiunknak figyelembe kell venni azt, hogy sokan vannak közöttünk, akik, közel sem ismerik a mérnöki számításokat, és azok újabb jelöléseit.
Na, ezért kellene közérthetően, vagy időnként elmagyarázva, írni. De, hogy számoljon az aki nem tudja, 10 el vagy százzal kellene számolni.
Tibor45 –öt nem megbántásként említeném, mint rossz példa. De, bizony ő sokszor, szándékosan, vagy nem, de úgy ír, hogy az olvasó 5 százaléka érti. Vagy az se.
Na, ez, nem a HOBBY CNC.
Itt a jobb pofám, lehet csapni!
Na szia! Ez azt jelenti, PÁ!
Ja, bocs ez is elavult, velem:))
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2013 január 25, 12:52
Írta: svejk Dátum 2013 január 25, 12:52
Te magad írtad lentebb:
"Mivel, itt sokan vagyunk, sok félék.
Jó, ha közérthetően beszélünk."
No ezért találták ki az SI rendszert,
vagy megtűrt rokonaikat. :)
Ezek közt nincs olyan, hogy f/p, erre hívtam fel a figyelmet.
Persze biztos van ahol használják, mert ugye "sokan vagyunk, sok félék".
"Mivel, itt sokan vagyunk, sok félék.
Jó, ha közérthetően beszélünk."
No ezért találták ki az SI rendszert,
vagy megtűrt rokonaikat. :)
Ezek közt nincs olyan, hogy f/p, erre hívtam fel a figyelmet.
Persze biztos van ahol használják, mert ugye "sokan vagyunk, sok félék".
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2013 január 25, 12:58
Írta: svejk Dátum 2013 január 25, 12:58
Megkövetlek, belenéztem a linkedbe...
A lap alja:
"Forrás [szerkesztés]
Kugler Sándor - Kugler Sándorné Kovács Györgyi: Fizikai képletek és táblázatok. Tankönyvkiadó Budapest, 1962."
No akkor még lehet használatos volt az f/p. én csak 4 év múlva születtem [#vigyor2]
No de azért a wiki szerkesztője vehetne már egy újabb Műszaki Zsebkönyvet :)
A lap alja:
"Forrás [szerkesztés]
Kugler Sándor - Kugler Sándorné Kovács Györgyi: Fizikai képletek és táblázatok. Tankönyvkiadó Budapest, 1962."
No akkor még lehet használatos volt az f/p. én csak 4 év múlva születtem [#vigyor2]
No de azért a wiki szerkesztője vehetne már egy újabb Műszaki Zsebkönyvet :)
Cím: Re:Léptetőmotor
Írta: keri Dátum 2013 január 25, 13:00
Írta: keri Dátum 2013 január 25, 13:00
Az eredeti kérdésben nincs semmi érdekes. A mértékegységes oltás sokkal izgalmasabb [#hehe][#love11]
A tartó nyomatékot álló helyzetben definiálja a gyártó, de mint sejtheted, forgó motornál ez közel nem lesz akkora. A jobb gyártók adatlapjain ezért a fordulatszám/nyomaték grafikon is megtalálható, különböző feszültségeken, névleges áram mellet.
Pl így:

A tartó nyomatékot álló helyzetben definiálja a gyártó, de mint sejtheted, forgó motornál ez közel nem lesz akkora. A jobb gyártók adatlapjain ezért a fordulatszám/nyomaték grafikon is megtalálható, különböző feszültségeken, névleges áram mellet.
Pl így:
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 25, 14:46
Írta: istvan58 Dátum 2013 január 25, 14:46
tudom mi a a tartó nyomaték, tudom hogy lehet megnérni, igy :
nyomaték mérés
csak az nem volt világos hogy DC vagy meghajtóra kötve,egy fazis vagy mindkető betápolva, stb. De most már tudom, konzultáltam egy gyártóval....
nyomaték mérés
csak az nem volt világos hogy DC vagy meghajtóra kötve,egy fazis vagy mindkető betápolva, stb. De most már tudom, konzultáltam egy gyártóval....
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 25, 14:55
Írta: 000000000 Dátum 2013 január 25, 14:55
Egyre "szörnyűbb" linkjeid vannak.:) Az a fogazottszíjra gányolt rúd siralmas látvány, innentől kezdve nem valami bizalom gerjesztő ez a mérés.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 25, 14:57
Írta: 000000000 Dátum 2013 január 25, 14:57
... akarom mondani fogazott szíjkerékre gányolt...
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 25, 15:06
Írta: istvan58 Dátum 2013 január 25, 15:06
srácok én most kiszálok ebböl a meddő vitábol...ti nyugodtan folytasátok.
Cím: Re:Léptetőmotor
Írta: dcsaba Dátum 2013 január 25, 16:04
Írta: dcsaba Dátum 2013 január 25, 16:04
Ez nagyon szellemes ötlet! és hobbi szinten tökéletesen használható! :-)
Cím: Re:Léptetőmotor
Írta: sunraw Dátum 2013 január 25, 16:06
Írta: sunraw Dátum 2013 január 25, 16:06
Nem igazán akarok itt okoskodni, de legjobb tudomásom szerint, az áttételeket akkor használják, ha indokolt az erő megtartása és az, hogy ne lehessen a kihajtott oldalról visszaforgatni az egységet. Szíjhajtásnál ez nehezen kivitelezhető, erre ott van a csigahajtás, itt már a motornak sem kell tartónyomaték. Egyik tanárom tanácsolta azt, hogy gondold át mit szeretnél és kezdj el visszafelé gondolkozni. Én már sokmindent láttam, sokféle áttételt, megoldást, de mindig igaz volt az, nem mindig az összetett dolgok a legjobbak. Ráadásul, egy jó vezérlő elektronika megoldás lehet mindenre. Értem ez alatt azt, hogy minek bonyorult áttétel, ha a vezérlés tud 1/100-as osztás is például? Érdemes végiggondolni, mi erőt és pénzt fektetünk egy hajtásláncba és mibe kerül egy jó vezérlés. Saját hibámból tudom. Építettem én is fogaszott szíjjas hajtást, 3:10 -es áttétellel, de csak a gondom volt vele. A végén mégis a direkthajtás maradt.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 január 25, 16:29
Írta: istvan58 Dátum 2013 január 25, 16:29
köszi a tanácsot, én is ugy gondoltam hogy megpróbálom a direkthajtást.
Ami adott:
4Nm motor, 4A, 3mH párhuzamosam.
DM556 vezérlő (azonos az MSDD-50-5.6-al)
5mm emelkedésü orsó.
Ezzel a kombinációval, 45V-rol próbák, sacolások szerint kb 5-6 ford/mp lehet elérni ugy hogy még van nyomaték. és igy 1500-1800mm/perc lesz az előtolás. Ez nekem elég.
Ami adott:
4Nm motor, 4A, 3mH párhuzamosam.
DM556 vezérlő (azonos az MSDD-50-5.6-al)
5mm emelkedésü orsó.
Ezzel a kombinációval, 45V-rol próbák, sacolások szerint kb 5-6 ford/mp lehet elérni ugy hogy még van nyomaték. és igy 1500-1800mm/perc lesz az előtolás. Ez nekem elég.
Cím: Re:Léptetőmotor
Írta: ebalint Dátum 2013 január 26, 10:25
Írta: ebalint Dátum 2013 január 26, 10:25
Én a kérdéses dátum előtt 6 évvel, de ezt tanultuk.
fordulatszám
Igaz nem a wikipédiáról, hanem fizika könyv volt a neve.
fordulatszám
Igaz nem a wikipédiáról, hanem fizika könyv volt a neve.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 29, 15:14
Írta: 000000000 Dátum 2013 január 29, 15:14
Sziasztok.5 kivezetéses unipoláris motort át tudok alakítani bipolárisnak? Annyi véleményt hallottam mar hogy nem tudom minek higgyek...Bipoláris vezérléshez nem lehet csak a6 vagy 8 kivezetésest átalakítani?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 29, 15:31
Írta: 000000000 Dátum 2013 január 29, 15:31
Ha szétszeded, akkor minden megoldható. Még 4 kivezetésest is tudsz csinálni belőle.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 29, 15:53
Írta: 000000000 Dátum 2013 január 29, 15:53
Ha szétszedem el tudom oldani a gyári átkötéseket a tekercsek között?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 29, 17:00
Írta: 000000000 Dátum 2013 január 29, 17:00
Amiket én eddig átalakítottam, az síma ügy volt.
Csak ismerni kell a lelki világát.
Csak ismerni kell a lelki világát.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 30, 12:59
Írta: 000000000 Dátum 2013 január 30, 12:59
Sziasztok!
Szervusz András!
Feltöltöttem két kepét....amint írtad a motor lelkét...ha nem túl nagy keres adnál hozza egy utasítást hogy hogyan lehet ezekből unipoláris motorokat varázsolni? Jó lenne ha jelezned a kepén valahogyan hogy hol és mit kell eloldanom és újra bogoznom...nem tudom látható-e elég világosan hogy 8 tekercses.Esetleg jobban bontsam szét vegyem le a nyákot hogy jobban bele lehessen látni?...Küldheted a magyarázatot emailban is de itt is jó lenne mert talán mások is okulhatnak belőle. (//%3CA%20HREF=%22http://kepfeltoltes.hu/view/130130/2738_www.kepfeltoltes.hu_.jpg%22%20TARGET=_fnew%3E%3CIMG%20SRC=%22http://kepfeltoltes.hu/thumb/130130/2738_www.kepfeltoltes.hu_.jpg%22%20border=0%3E%3C/A%3E%20%20A%20k%C3%A9pet%20a%20K%C3%A9pfelt%C3%B6lt%C3%A9s.hu%20t%C3%A1rolja.%20%3CA%20HREF=%22http://www.kepfeltoltes.hu%22%20TARGET=_fnew%3Ehttp://www.kepfeltoltes.hu%3C/A%3E)
(//%3CA%20HREF=%22http://kepfeltoltes.hu/view/130130/2739_www.kepfeltoltes.hu_.jpg%22%20TARGET=_fnew%3E%3CIMG%20SRC=%22http://kepfeltoltes.hu/thumb/130130/2739_www.kepfeltoltes.hu_.jpg%22%20border=0%3E%3C/A%3E%20A%20k%C3%A9pet%20a%20K%C3%A9pfelt%C3%B6lt%C3%A9s.hu%20t%C3%A1rolja.%20%3CA%20HREF=%22http://www.kepfeltoltes.hu%22%20TARGET=_fnew%3Ehttp://www.kepfeltoltes.hu%3C/A%3E)
Szervusz András!
Feltöltöttem két kepét....amint írtad a motor lelkét...ha nem túl nagy keres adnál hozza egy utasítást hogy hogyan lehet ezekből unipoláris motorokat varázsolni? Jó lenne ha jelezned a kepén valahogyan hogy hol és mit kell eloldanom és újra bogoznom...nem tudom látható-e elég világosan hogy 8 tekercses.Esetleg jobban bontsam szét vegyem le a nyákot hogy jobban bele lehessen látni?...Küldheted a magyarázatot emailban is de itt is jó lenne mert talán mások is okulhatnak belőle. (//%3CA%20HREF=%22http://kepfeltoltes.hu/view/130130/2738_www.kepfeltoltes.hu_.jpg%22%20TARGET=_fnew%3E%3CIMG%20SRC=%22http://kepfeltoltes.hu/thumb/130130/2738_www.kepfeltoltes.hu_.jpg%22%20border=0%3E%3C/A%3E%20%20A%20k%C3%A9pet%20a%20K%C3%A9pfelt%C3%B6lt%C3%A9s.hu%20t%C3%A1rolja.%20%3CA%20HREF=%22http://www.kepfeltoltes.hu%22%20TARGET=_fnew%3Ehttp://www.kepfeltoltes.hu%3C/A%3E)
(//%3CA%20HREF=%22http://kepfeltoltes.hu/view/130130/2739_www.kepfeltoltes.hu_.jpg%22%20TARGET=_fnew%3E%3CIMG%20SRC=%22http://kepfeltoltes.hu/thumb/130130/2739_www.kepfeltoltes.hu_.jpg%22%20border=0%3E%3C/A%3E%20A%20k%C3%A9pet%20a%20K%C3%A9pfelt%C3%B6lt%C3%A9s.hu%20t%C3%A1rolja.%20%3CA%20HREF=%22http://www.kepfeltoltes.hu%22%20TARGET=_fnew%3Ehttp://www.kepfeltoltes.hu%3C/A%3E)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 30, 13:15
Írta: 000000000 Dátum 2013 január 30, 13:15
Esetleg itt van egy harmadik is [img]
Szerencsétlenek barbár módon voltak egy kicsit bontva :) ettől függetlenül meg felhasznélhatoaknak ítélem.

Szerencsétlenek barbár módon voltak egy kicsit bontva :) ettől függetlenül meg felhasznélhatoaknak ítélem.
Cím: Re:Léptetőmotor
Írta: zoli0302 Dátum 2013 január 30, 13:17
Írta: zoli0302 Dátum 2013 január 30, 13:17
Szia !
Van ennek a motornak adattáblája ?
A 8 tekercs 5 kivezetéssel értelmetlennek tűnik..
Van ennek a motornak adattáblája ?
A 8 tekercs 5 kivezetéssel értelmetlennek tűnik..
Cím: Re:Léptetőmotor
Írta: zoli0302 Dátum 2013 január 30, 13:25
Írta: zoli0302 Dátum 2013 január 30, 13:25
Nagy valószínűséggel a piros és a kék vezetéknél kell megbontanod, a fehér kivezetéshez kapcsolódik a barna vezetékhez tartozó másik tekercsvég, a barnához a fehér vezetékhez tartozó másik tekercsvég.A másik felén ugyanez a helyzet csak a szinek mások
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 30, 13:59
Írta: 000000000 Dátum 2013 január 30, 13:59
Rajzot nem kaptam róla...de kaptam leírást...ez szerint én tévedtem az utóbbi amin 6 kivezetés van az bipoláris :Detailed Description
MFG: SANYO DENKI
P/N: 103G770-1856
NEMA: 23
COIL: 3.5V/1.5A/2.4ohm/2.9mH
TYPE: 2 Phase Bi-Polar 6 lead
STEP ANGLE: 1.8 deg
6.5mm dia. X 18mm steel shaft with a pressfit 3/4” dia. 25 tooth, plastic cog belt gear. Ball bearings, 5in leads. Removable anti-vibration bracket with mtg. ears. 4 corner mounting holes (motor).
L: 2-1/8"(Body) Sq: 2-3/16" WT: 1.3
Most mar csak azt kell tudnom hogy hogyan csináljak a 6-bol 4-et valamint az előbbi kettőnél az 5-bol 4 kivezetést.
MFG: SANYO DENKI
P/N: 103G770-1856
NEMA: 23
COIL: 3.5V/1.5A/2.4ohm/2.9mH
TYPE: 2 Phase Bi-Polar 6 lead
STEP ANGLE: 1.8 deg
6.5mm dia. X 18mm steel shaft with a pressfit 3/4” dia. 25 tooth, plastic cog belt gear. Ball bearings, 5in leads. Removable anti-vibration bracket with mtg. ears. 4 corner mounting holes (motor).
L: 2-1/8"(Body) Sq: 2-3/16" WT: 1.3
Most mar csak azt kell tudnom hogy hogyan csináljak a 6-bol 4-et valamint az előbbi kettőnél az 5-bol 4 kivezetést.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 30, 13:59
Írta: 000000000 Dátum 2013 január 30, 13:59
Rajzot nem kaptam róla...de kaptam leírást...ez szerint én tévedtem az utóbbi amin 6 kivezetés van az bipoláris :Detailed Description
MFG: SANYO DENKI
P/N: 103G770-1856
NEMA: 23
COIL: 3.5V/1.5A/2.4ohm/2.9mH
TYPE: 2 Phase Bi-Polar 6 lead
STEP ANGLE: 1.8 deg
6.5mm dia. X 18mm steel shaft with a pressfit 3/4” dia. 25 tooth, plastic cog belt gear. Ball bearings, 5in leads. Removable anti-vibration bracket with mtg. ears. 4 corner mounting holes (motor).
L: 2-1/8"(Body) Sq: 2-3/16" WT: 1.3
Most mar csak azt kell tudnom hogy hogyan csináljak a 6-bol 4-et valamint az előbbi kettőnél az 5-bol 4 kivezetést.
MFG: SANYO DENKI
P/N: 103G770-1856
NEMA: 23
COIL: 3.5V/1.5A/2.4ohm/2.9mH
TYPE: 2 Phase Bi-Polar 6 lead
STEP ANGLE: 1.8 deg
6.5mm dia. X 18mm steel shaft with a pressfit 3/4” dia. 25 tooth, plastic cog belt gear. Ball bearings, 5in leads. Removable anti-vibration bracket with mtg. ears. 4 corner mounting holes (motor).
L: 2-1/8"(Body) Sq: 2-3/16" WT: 1.3
Most mar csak azt kell tudnom hogy hogyan csináljak a 6-bol 4-et valamint az előbbi kettőnél az 5-bol 4 kivezetést.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 30, 14:28
Írta: 000000000 Dátum 2013 január 30, 14:28
Egy biztos, hogy a kötéseket szét kell szedni és akkor lesz 8 véged. Ezeket kell megfelelően összeválogatni. Ha minden igaz, akkor két színű a tekercselés. Az már egy támpont.
De ha nem ismered a motorokat egyáltalán, akkor bátorság nekifogni de nem lehetetlen.
Tudni kell melyik a tekercs kezdő és végző kivezetése.
De ha nem ismered a motorokat egyáltalán, akkor bátorság nekifogni de nem lehetetlen.
Tudni kell melyik a tekercs kezdő és végző kivezetése.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 30, 16:27
Írta: 000000000 Dátum 2013 január 30, 16:27
Ok. ha szétszedtem akkor elkezdem kimerni a végeket és az egyformákat párosítom mi eltérő azokat kihagyom.Most mar csak nyit kellene tudjak hogy melyik mutat nagyobb ohmot ha a tekercs két véget merem ki vagy ha a végét és a közbeeső kivezetést?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 30, 19:21
Írta: 000000000 Dátum 2013 január 30, 19:21
Egy tekercsnek két vége van, aminek csak egyféle ellenállása. Minden egyéb ellenállás érték már nem egy tekercset jelent. Ohm mérővel meg nem méred, hogy melyik a tekercs kezdete és melyik a vége.
Cím: Re:Léptetőmotor
Írta: LittleSV Dátum 2013 január 30, 19:33
Írta: LittleSV Dátum 2013 január 30, 19:33
Ez lehet ad némi támpontot: Léptetőmotorok
Cím: Re:Léptetőmotor
Írta: bicme92us Dátum 2013 január 30, 20:33
Írta: bicme92us Dátum 2013 január 30, 20:33
© gyozo_33 #3819
Rajzot nem kaptam róla...de kaptam leírást...ez szerint én tévedtem az utóbbi amin 6 kivezetés van az bipoláris :Detailed Description
Az unipoláris.
Hat kivezetésből, hogy lesz nyolc)
Rajzot nem kaptam róla...de kaptam leírást...ez szerint én tévedtem az utóbbi amin 6 kivezetés van az bipoláris :Detailed Description
Az unipoláris.
Hat kivezetésből, hogy lesz nyolc)
Cím: Re:Léptetőmotor
Írta: bicme92us Dátum 2013 január 30, 20:39
Írta: bicme92us Dátum 2013 január 30, 20:39
És mi van az autótrafóval? Hány tekercs?
Cím: Re:Léptetőmotor
Írta: bicme92us Dátum 2013 január 30, 20:44
Írta: bicme92us Dátum 2013 január 30, 20:44
És mi van az autótrafóval? Hány tekercs?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 30, 21:17
Írta: 000000000 Dátum 2013 január 30, 21:17
Nem értettem a hozzá fűzésedet...Én azt próbáltam írni hogy bipoláris és nyolc tekercs latszik de 6 kivezetés van rajta amiből nekem elég lenne a bipoláris vezérléshez a 4 kivezetés....tehát azt kellene megoldanom hogy 8 tekercs és 6 kivezetésből maradjon 8 tekercs és 4 kivezetés. A másik kettőnek szinten 8 tekercs latszik de 5 kivezetés van.Ez mar több mint biztos unipoláris és ugyanúgy a nyolc tekercsből az 5 helyett 4 kivezetés kellene maradjon. Ez jó kérdés de majd elviszem őket egy tekercselő szakihoz talán az tudja a megoldást.....ha mar itt nem találok rá valakitől egy részletes magyarázatot hogy hogyan merjem ki a tekercs végeket és hogyan válasszam le az áthidalásokat a tekercsek között.
Cím: Re:Léptetőmotor
Írta: bicme92us Dátum 2013 január 30, 21:29
Írta: bicme92us Dátum 2013 január 30, 21:29
ok 6 kivezetés van (fizikailag)?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 30, 21:30
Írta: 000000000 Dátum 2013 január 30, 21:30
Igen fizikailag ahogyan a foton is latod.
Cím: Re:Léptetőmotor
Írta: bicme92us Dátum 2013 január 30, 21:31
Írta: bicme92us Dátum 2013 január 30, 21:31
Melyik fotón?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 30, 21:33
Írta: 000000000 Dátum 2013 január 30, 21:33
3813-as beszólás alább
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 30, 21:35
Írta: 000000000 Dátum 2013 január 30, 21:35
3815 bocsi...ay a bipolaris es a 3814 a ket unipolaris
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 30, 21:43
Írta: 000000000 Dátum 2013 január 30, 21:43
Mi köze at autotrafónak a léptető motorhoz?
Az autotrafónak hány tekercse van és annak hány kivezetése?
Minden kivezetés után egy újabb tekercsnek fogható fel. Kezdő végző kötéssel. Nemde?
Tehát egy tekercsnek akkor is két vége van. Ha egy vége van, akkor a másik beszakadt, ha nincs vége akkor végtelen, ha három vége van, akkor az két tekercs egymással sorba kötve.
Az autotrafónak hány tekercse van és annak hány kivezetése?
Minden kivezetés után egy újabb tekercsnek fogható fel. Kezdő végző kötéssel. Nemde?
Tehát egy tekercsnek akkor is két vége van. Ha egy vége van, akkor a másik beszakadt, ha nincs vége akkor végtelen, ha három vége van, akkor az két tekercs egymással sorba kötve.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 30, 21:48
Írta: 000000000 Dátum 2013 január 30, 21:48
Nem az a baj, hogy nem kapsz részletes magyarázatot.
Már kaptál, csak nem tudod kezelni, mivel nem érted a tekercsek elrendezését és kötését.
Ha szétszedted, akkor látnod kell minden tekercsvéget. Vagyis 8 véget kell látnod.
Ezeket kell(ene) beazonosítanod, ki kivel és miért. Utána átrendezni a megfelelő kötésmódra.
Én most alakítottam át 6végű unipolárist 4 végű, párhuzamos tekercsű bipolárissá.
De ismeret nélkül csak leírás alapján nem fog menni.
Már kaptál, csak nem tudod kezelni, mivel nem érted a tekercsek elrendezését és kötését.
Ha szétszedted, akkor látnod kell minden tekercsvéget. Vagyis 8 véget kell látnod.
Ezeket kell(ene) beazonosítanod, ki kivel és miért. Utána átrendezni a megfelelő kötésmódra.
Én most alakítottam át 6végű unipolárist 4 végű, párhuzamos tekercsű bipolárissá.
De ismeret nélkül csak leírás alapján nem fog menni.
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2013 január 30, 21:52
Írta: B.Zoltán Dátum 2013 január 30, 21:52
Én szívesen elmondom, ott a Skype címem, ha tudsz, hívj fel, egyszerűbb lenne, ha mondanám, és csinálnád közben, mert így hosszadalmas lenne, ha oda-vissza írogatunk.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 30, 21:58
Írta: 000000000 Dátum 2013 január 30, 21:58
Köszönöm az ajánlatot...ma mar késő van de talán élni fogok vele a közel jövőben.
Cím: Re:Léptetőmotor
Írta: bicme92us Dátum 2013 január 30, 21:59
Írta: bicme92us Dátum 2013 január 30, 21:59
Ok, kérdezted a bi-polárist. Négy vezeték . kettő - kettő összetartozik, összetartozó kettőt felcseréled, változik a forgásirány
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2013 január 30, 22:00
Írta: B.Zoltán Dátum 2013 január 30, 22:00
Ohm mérővel megkeresed azt a tekercset (két kivezetést), aminek a legnagyobb az ellenállása. És a közepét is könnyen megtalálod, mert annak az ellenállása a fele.
Annál a vezetéknél két huzalnak kell odamenni, azt szét kell bontani.
És ezek után már tudod párhuzamosítani a tekercseket.
Annál a vezetéknél két huzalnak kell odamenni, azt szét kell bontani.
És ezek után már tudod párhuzamosítani a tekercseket.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 30, 22:00
Írta: 000000000 Dátum 2013 január 30, 22:00
Igazad van...egy kicsit tényleg megkavarnak a dolgok de muszáj valahogyan megértenem....önfejű vagyok..:)Majd csak rájövök...szerintem logika az egész...csak nem kapom a fonal véget :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 30, 22:02
Írta: 000000000 Dátum 2013 január 30, 22:02
Zoltán ezt kerestem és kérdeztem az előbb is és köszönöm a válaszodat!!!!
Cím: Re:Léptetőmotor
Írta: bicme92us Dátum 2013 január 30, 22:08
Írta: bicme92us Dátum 2013 január 30, 22:08
Végtére igazad van, de az autotrafó, mivel egy tekercs, sok leágazással, attól még egy tekercs marad. De, ha a leágazásokat (is, külön mérjük) akkor Neked is igazad lehet.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 30, 22:30
Írta: 000000000 Dátum 2013 január 30, 22:30
A leágazásoknál mindkét vég ki van vezetve. Ez most vagy el van vágva, vagy csak tisztítva, ez technológia kérdése. Innentől kezdve külön tekercs.
Cím: Re:Léptetőmotor
Írta: bicme92us Dátum 2013 január 30, 22:45
Írta: bicme92us Dátum 2013 január 30, 22:45
Tényleg? AZ autotrafónál?
Cím: Re:Léptetőmotor
Írta: bicme92us Dátum 2013 január 30, 22:46
Írta: bicme92us Dátum 2013 január 30, 22:46
ott nincs elvágva, egy tekercs!!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 30, 22:59
Írta: 000000000 Dátum 2013 január 30, 22:59
Mert, szerinted hogy hozza ki a végét?
Megvakarja a menetet és ráforrasztja?
Kókányéknál lehet.
Megvakarja a menetet és ráforrasztja?
Kókányéknál lehet.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 január 31, 20:36
Írta: 000000000 Dátum 2013 január 31, 20:36
Sziasztok :) most tervezem hogy csinálok egy habvágót 2x2 D set akarok csinálni. És itt jöna kérdésem hogy honan tudom hogy a motoroknál meg adot érték.044Nm vagy 1,26 Nm az konkrétan mekkora erőt jelent. arra volnék kíváncsi ha egy 20 as tengelyre tekernék egy damilt, és a motort el indítom a mérleg menyit fog mutatni ??. ugyanis ha meg csinálom a mechanicát akkor ez egy jó támpont volna a tesztelésre. tudom hogy kicsit primitívnek tűnik de legalább mérhető, vagy ha tudtok valami jó öltetett akor szívesen várom, de ne az legyen hogy a cégnél használt eszterga motorját vegyem meg mert az biztos hogy elég lesz :) cl200
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2013 január 31, 21:02
Írta: s7manbs8 Dátum 2013 január 31, 21:02
Ha erre gondoltál:
Képletek és számítások topic svejk koma #2 aranyköpése :)
Menetes hajtásnál:
egyenesvonalú erő(N)= 6.28 * forgatónyomaték(Nm) / menetemelkedés(m)
Képletek és számítások topic svejk koma #2 aranyköpése :)
Menetes hajtásnál:
egyenesvonalú erő(N)= 6.28 * forgatónyomaték(Nm) / menetemelkedés(m)
Cím: Re:Léptetőmotor
Írta: xfg6v697j Dátum 2013 január 31, 21:02
Írta: xfg6v697j Dátum 2013 január 31, 21:02
Az 1Nm annyit tesz,hogy a feszültség alá helyezet motor a tengely középpontjától 1m távolságra kb ~10 dkg-ot tud megtartani.
A 20mm átmérőjü tengelyre átszámítva,ez kb~10 Kg-ot jelent.
De a forgó motor nem fog ennyit megemelni.
A 20mm átmérőjü tengelyre átszámítva,ez kb~10 Kg-ot jelent.
De a forgó motor nem fog ennyit megemelni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 február 01, 22:11
Írta: 000000000 Dátum 2013 február 01, 22:11
Nagyon szépen köszönöm így már tiszta sor :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 február 04, 19:26
Írta: 000000000 Dátum 2013 február 04, 19:26
kedves elektron koma a sorsnak nagyon furcsa a fintora :) úgy is mondhatnám hogy nagy humorista :)sveik aranyköpéseit illetőén :) nem kell a topikot el olvasni :) ugyanis ma kiderült hogy munkatársak vagyunk :) szerinted ????
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2013 február 04, 19:44
Írta: s7manbs8 Dátum 2013 február 04, 19:44
Ekkora szerencsét, igen sokat tud majd mesélni akkor. Ha jól olvastam látott már pár motorkát :)
Cím: Re:Léptetőmotor
Írta: TROMF22 Dátum 2013 február 05, 17:28
Írta: TROMF22 Dátum 2013 február 05, 17:28
Szervusztok!
Léptetős kérdés a tapasztalt fórumozókhoz:
Van egy nem túl gyakori vezérlőm, ODIN-3D /Uwe Wulf, DE/
2 fázisú bipolár motorokhoz készült, max. 3A fázisárammal terhelhető.
A leírás szerint az ajánlott motorok fázistekercs ellenállása: 0,3 – 5 Ohm.
Van egy léptetőmotorom, aminek tekercs ellenállása 0,37 Ohm, viszont a
fázisárama 4,7 A.
(Mindkét adat katalógus érték.)
Össze lehet-e ezeket ereszteni?
Első körben arra gondoltam, hogy a vezérlő úgy sem ad ki 3A –nél több áramot, legfeljebb a motor kisebb nyomatékot ad le, mint elméletileg adhatna.
Valós ez a megközelítés? Vagy várható füst és egy kis forróság.
Nagyon kezdőként nem szívesen kockáztatnám az LMD 18245 IC-ket.
(Állítólag ezek valami finom darabok.)
Léptetős kérdés a tapasztalt fórumozókhoz:
Van egy nem túl gyakori vezérlőm, ODIN-3D /Uwe Wulf, DE/
2 fázisú bipolár motorokhoz készült, max. 3A fázisárammal terhelhető.
A leírás szerint az ajánlott motorok fázistekercs ellenállása: 0,3 – 5 Ohm.
Van egy léptetőmotorom, aminek tekercs ellenállása 0,37 Ohm, viszont a
fázisárama 4,7 A.
(Mindkét adat katalógus érték.)
Össze lehet-e ezeket ereszteni?
Első körben arra gondoltam, hogy a vezérlő úgy sem ad ki 3A –nél több áramot, legfeljebb a motor kisebb nyomatékot ad le, mint elméletileg adhatna.
Valós ez a megközelítés? Vagy várható füst és egy kis forróság.
Nagyon kezdőként nem szívesen kockáztatnám az LMD 18245 IC-ket.
(Állítólag ezek valami finom darabok.)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 február 05, 19:29
Írta: 000000000 Dátum 2013 február 05, 19:29
Persze, össze lehet.
Viszont nem érdemes hajszolni ezeket a driver IC-ket (elég drága cucc), a 3 A-t is érdemes kerülni, max 2.5 - 2.8 A motoráramot állítsál be.
Így sajnos nem tudod a motorodnak a 4.7 A-t biztosítani, azaz ~60%-a lesz a tartónyomatékuk annak, amit ki lehetett volna hozni max. belőle. Még így is nagy valószínűséggel szépen viszi majd az adott mechanikát, bár arról nem írtál semmit.
Viszont nem érdemes hajszolni ezeket a driver IC-ket (elég drága cucc), a 3 A-t is érdemes kerülni, max 2.5 - 2.8 A motoráramot állítsál be.
Így sajnos nem tudod a motorodnak a 4.7 A-t biztosítani, azaz ~60%-a lesz a tartónyomatékuk annak, amit ki lehetett volna hozni max. belőle. Még így is nagy valószínűséggel szépen viszi majd az adott mechanikát, bár arról nem írtál semmit.
Cím: Re:Léptetőmotor
Írta: TROMF22 Dátum 2013 február 05, 19:52
Írta: TROMF22 Dátum 2013 február 05, 19:52
Köszönöm!
Akkor nem reménytelen a dolog. Természetesen az általad említett kompromisszummal. Óvatos leszek az áramok beállításával.
A mechanikáról nem tettem említést, mert egyelőre azt a részt próbálom "demo" szinten összerakosgatni ami számomra ujdonság ebben a körben:
hogyan lehet életre kelteni: bontott léptetőt + használt vezérlőt + tápot + egy öregecske PC-t + egy Mach3-at. Persze valami kis műterhelést kapnak a léptetők, hogy érzékelhető legyen milyen parancsra, beavatkozásra milyen jelenség a válasz.
Ehhez még egy bútorlap masinát is tulzásnak tartok.
Közben olvasgatok, tanulgatok. Jó időtöltés.
Akkor nem reménytelen a dolog. Természetesen az általad említett kompromisszummal. Óvatos leszek az áramok beállításával.
A mechanikáról nem tettem említést, mert egyelőre azt a részt próbálom "demo" szinten összerakosgatni ami számomra ujdonság ebben a körben:
hogyan lehet életre kelteni: bontott léptetőt + használt vezérlőt + tápot + egy öregecske PC-t + egy Mach3-at. Persze valami kis műterhelést kapnak a léptetők, hogy érzékelhető legyen milyen parancsra, beavatkozásra milyen jelenség a válasz.
Ehhez még egy bútorlap masinát is tulzásnak tartok.
Közben olvasgatok, tanulgatok. Jó időtöltés.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 február 24, 18:43
Írta: 000000000 Dátum 2013 február 24, 18:43
Sziasztok.
Nem tudja valaki hogy honnan tudnám letölteni a profi 1 es vezérlőhöz a PWM manager t?
Nem tudja valaki hogy honnan tudnám letölteni a profi 1 es vezérlőhöz a PWM manager t?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 február 24, 19:13
Írta: 000000000 Dátum 2013 február 24, 19:13
Állati nagy szerencséd van mert elszállt egy 500Gb--os HDD-m és így szinte minden oda lett.
Viszont ezt teljesen véletlen megtaláltam egy másik adat tárolón.
Átküldöm neked.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 február 25, 15:54
Írta: 000000000 Dátum 2013 február 25, 15:54
Pál köszönöm szépen a segítséget.
Cím: Re:Léptetőmotor
Írta: a86ifm7g5 Dátum 2013 március 13, 19:38
Írta: a86ifm7g5 Dátum 2013 március 13, 19:38
Helló!
Az normális, ha a bipoláris motorom (2,1A/phase) 1,5A-el hajtva 30 perc után 50 celsius fokos. TB6560AHQ vezérlővel hajtom, a vezérlő viszont tök hideg.
Az normális, ha a bipoláris motorom (2,1A/phase) 1,5A-el hajtva 30 perc után 50 celsius fokos. TB6560AHQ vezérlővel hajtom, a vezérlő viszont tök hideg.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 március 13, 19:47
Írta: 000000000 Dátum 2013 március 13, 19:47
Az 50 fok teljesen jó.
Az áram hőt fejleszt. Nincs abban semmi.
Az áram hőt fejleszt. Nincs abban semmi.
Cím: Re:Léptetőmotor
Írta: f35ezvjs Dátum 2013 március 13, 19:55
Írta: f35ezvjs Dátum 2013 március 13, 19:55
Szia!
Tegyél rá rgy kis ventilátort az majd visszahűti.
Én így használom egy éve a gépemet és nem gond ha forró nyár van mert akkor sem melegszik fel.
Sajnos ventilátor nélkül nekem is nagyon melegszik egy idő után.
Tegyél rá rgy kis ventilátort az majd visszahűti.
Én így használom egy éve a gépemet és nem gond ha forró nyár van mert akkor sem melegszik fel.
Sajnos ventilátor nélkül nekem is nagyon melegszik egy idő után.
Cím: Re:Léptetőmotor
Írta: 2dbfy8y Dátum 2013 március 13, 20:03
Írta: 2dbfy8y Dátum 2013 március 13, 20:03
Ez teljesen igaz! [#eljen]
Nekem is az új gépemen kis léptecsek vannak, a piko drive-vel vannak vezérelve max áramon!
Mértem rajta 65 fokot!
Ráraktam proci hűtőventit bordával együtt, azóta, alig langyos, simán rajta lehet tartani a kezet, pedig ment 4 órát is egyhuzamban!
Nekem is az új gépemen kis léptecsek vannak, a piko drive-vel vannak vezérelve max áramon!
Mértem rajta 65 fokot!
Ráraktam proci hűtőventit bordával együtt, azóta, alig langyos, simán rajta lehet tartani a kezet, pedig ment 4 órát is egyhuzamban!
Cím: Re:Léptetőmotor
Írta: a86ifm7g5 Dátum 2013 március 13, 20:12
Írta: a86ifm7g5 Dátum 2013 március 13, 20:12
Hogyan lehet egy hengeres testre bordát, hűtőventillátort tenni?
Cím: Re:Léptetőmotor
Írta: 2dbfy8y Dátum 2013 március 13, 20:17
Írta: 2dbfy8y Dátum 2013 március 13, 20:17
"Hogyan lehet egy hengeres testre bordát, hűtőventillátort tenni? "
Erről nem volt szó! [#nevetes1]
Az enyém négyzet alakú!
Ha nincs a végén tengely kivezetés, talán oda is rakható a borda, vagy venti!
Erről nem volt szó! [#nevetes1]
Az enyém négyzet alakú!
Ha nincs a végén tengely kivezetés, talán oda is rakható a borda, vagy venti!
Cím: Re:Léptetőmotor
Írta: f35ezvjs Dátum 2013 március 13, 20:32
Írta: f35ezvjs Dátum 2013 március 13, 20:32
Figyelj!
ez a legegyszerűbb
bilincsel felcsavarozni a ventilátort. Nekem egyszerűen egy kábelkötözővel van rátéve az is jó a hengeresre.
ez a legegyszerűbb
bilincsel felcsavarozni a ventilátort. Nekem egyszerűen egy kábelkötözővel van rátéve az is jó a hengeresre.
Cím: Re:Léptetőmotor
Írta: a86ifm7g5 Dátum 2013 március 13, 21:30
Írta: a86ifm7g5 Dátum 2013 március 13, 21:30
Egyébként létezik, kapható valahol konkrétan 57mm-es hengeres motorra hűtőborda?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 március 13, 21:33
Írta: 000000000 Dátum 2013 március 13, 21:33
RC modell boltban nézz szét.
Én 36mm-esre vettem.
Én 36mm-esre vettem.
Cím: Re:Léptetőmotor
Írta: a86ifm7g5 Dátum 2013 március 13, 21:39
Írta: a86ifm7g5 Dátum 2013 március 13, 21:39
Igen, köszönöm szépen a választ, böngéztem, és én is csak 36mm-est találtam. 57mm-es hengeres bordát egyenlőre nem találtam. Illetve találtam itt ebben a topikban, de sajnos semmi infó nincs róla.
Cím: Re:Léptetőmotor
Írta: a86ifm7g5 Dátum 2013 március 14, 11:23
Írta: a86ifm7g5 Dátum 2013 március 14, 11:23
Az jutott eszembe, hogy VGA chipset hűtőt próbálok rátenni a motor végére. Kipróbálom, és referálok, az eredményről. Lefényképezem majd ha beválik.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 március 14, 12:58
Írta: 000000000 Dátum 2013 március 14, 12:58
Szerintem egy régi 486-os proc ventillátor is elég neki önmagában. Felrögzíted, hogy a lapát be érjen bele és had menjen.
Egyébként az 50-60 fok nem káros az egészségére.
Egyébként az 50-60 fok nem káros az egészségére.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 március 14, 14:18
Írta: istvan58 Dátum 2013 március 14, 14:18
Hali,
sokat lehet olvasni mindeféle fórumon hogy mindenki retteg a nyilthurku vezérlés lépésvesztéséröl. Van már olyan kütyü ami leálitja a mach-ot ha egy bizonyos lépésvesztés létre jön, a linuxcnc elvileg tudja figyelni az encodert.
Elgondolkoztam egy egyszerü dolgon amit mach-tol fügetlenül be lehet állitani ugy hogy bizonyos lépésvesztéskor leálitsa a rendszert.
Be lehet szerezeni olcsóbb enkódereket, 200-500ppr felbontásal. Egy számláló számolná a step jeleket és az enkóder impulzus mindég nulázná a számlálót. Például ha mondjuk be van állitva 5000 step/fordulat, az enkóder meg csak 500ppm (quadrature enkóderböl kijön 2000 imp/ford) akkor ha a számlálót beálitjuk 4-re, ás kimarad 2-3 lépés akor mér nem nulláz az enkóder és létrejön az Estop jel.
valami ilyenre gondoltam, de még csak elméleti szinten, majd valószinü ki fogom próbálni.

sokat lehet olvasni mindeféle fórumon hogy mindenki retteg a nyilthurku vezérlés lépésvesztéséröl. Van már olyan kütyü ami leálitja a mach-ot ha egy bizonyos lépésvesztés létre jön, a linuxcnc elvileg tudja figyelni az encodert.
Elgondolkoztam egy egyszerü dolgon amit mach-tol fügetlenül be lehet állitani ugy hogy bizonyos lépésvesztéskor leálitsa a rendszert.
Be lehet szerezeni olcsóbb enkódereket, 200-500ppr felbontásal. Egy számláló számolná a step jeleket és az enkóder impulzus mindég nulázná a számlálót. Például ha mondjuk be van állitva 5000 step/fordulat, az enkóder meg csak 500ppm (quadrature enkóderböl kijön 2000 imp/ford) akkor ha a számlálót beálitjuk 4-re, ás kimarad 2-3 lépés akor mér nem nulláz az enkóder és létrejön az Estop jel.
valami ilyenre gondoltam, de még csak elméleti szinten, majd valószinü ki fogom próbálni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 március 14, 14:43
Írta: 000000000 Dátum 2013 március 14, 14:43
Vannak már olyan vezérlők is amik még enkóder nélkül is tudják ezt.
Ha már enkóder van a léptetőmotoron akkor meg lehet olyan vezérlőt is választani amivel már szervóként működik.
Az igaz az ilyen vezérlők még erősen zsebbenyúlós dolgok.
Majd kíváncsi leszek mire jutsz vele, de a zavarvédelemre szerintem erősen figyelj.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 március 14, 14:45
Írta: istvan58 Dátum 2013 március 14, 14:45
ja de csak 300 1/min fordulatszámtol, pl AM882
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 március 14, 14:49
Írta: 000000000 Dátum 2013 március 14, 14:49
Te is tudod jól hogy ilyen kis fordulaton nem lesz lépésvesztés [#papakacsint]
Mindig a nagyobb fordulatoknál kezdődik a probléma.
Ha már 300RPM alatt hibázik a motor akkor ott valami nagyon el van méretezve.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 március 14, 14:50
Írta: istvan58 Dátum 2013 március 14, 14:50
ja, ebben igazad van..
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 március 14, 14:56
Írta: istvan58 Dátum 2013 március 14, 14:56
na meg kicsit leveleztem err0l a Leadshine mérnökével és ezt a választ kaptam:
"When the motor stall, the AM882 can detect it and goes into alarm state. However, this may not work for all motor especially its inductance is very large or very small. And the sensorless stall detection requires the motor speed to be above 300RPM at the least."
vagyis elég bizonytalan főleg alacsony induktivitásu motoral.
"When the motor stall, the AM882 can detect it and goes into alarm state. However, this may not work for all motor especially its inductance is very large or very small. And the sensorless stall detection requires the motor speed to be above 300RPM at the least."
vagyis elég bizonytalan főleg alacsony induktivitásu motoral.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 március 14, 15:03
Írta: 000000000 Dátum 2013 március 14, 15:03
Na igen ez egy ilyen hamis biztonságérzetet ad.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 március 14, 15:08
Írta: istvan58 Dátum 2013 március 14, 15:08
Az én ötlettem szerintem elég biztonságos csak jól meg kell csinálni. Na meg kell az enkóder...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 március 14, 15:11
Írta: 000000000 Dátum 2013 március 14, 15:11
Esetleg, ha erre járnál akkor hozzád vágok egy omron 1000-es enkódert, de csak egy feltétellel !
Hogy soha többet vissza nem hozhatod. [#hehe]
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 március 14, 15:27
Írta: istvan58 Dátum 2013 március 14, 15:27
merre?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 március 14, 15:29
Írta: 000000000 Dátum 2013 március 14, 15:29
Most néztem van rajta egy műanyag kuplung meg egy gyári felfogató lemez.
Egy két tengelyvéges motorra seperc alatt fel lehet dobni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 március 14, 15:29
Írta: 000000000 Dátum 2013 március 14, 15:29
Fent északon Dunakanyar, Vác
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 március 14, 15:32
Írta: istvan58 Dátum 2013 március 14, 15:32
én Zalaegerszeg...:)
Cím: Re:Léptetőmotor
Írta: Devecz Miklós Dátum 2013 március 14, 15:46
Írta: Devecz Miklós Dátum 2013 március 14, 15:46
Még egy egerszegi?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 március 14, 15:47
Írta: 000000000 Dátum 2013 március 14, 15:47
Mondtam ha erre jársz.
Sajnos már befejeztük alattatok elterülő részen lévő cementgyár gyengeáramú kivitelezését, így azt se mondom hogy elugranék bedobni.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 március 14, 15:53
Írta: istvan58 Dátum 2013 március 14, 15:53
ja....miért te is?
Cím: Re:Léptetőmotor
Írta: Devecz Miklós Dátum 2013 március 14, 15:59
Írta: Devecz Miklós Dátum 2013 március 14, 15:59
Igen.
Cím: Re:Léptetőmotor
Írta: NickE Dátum 2013 március 17, 15:23
Írta: NickE Dátum 2013 március 17, 15:23
Nema17 (vagy nagyon hasonló) motorokat hol lehet a legkedvezőbb áron beszerezni?
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2013 március 17, 16:22
Írta: c2nsu773m Dátum 2013 március 17, 16:22
nálam!
Cím: Re:Léptetőmotor
Írta: a86ifm7g5 Dátum 2013 március 24, 10:26
Írta: a86ifm7g5 Dátum 2013 március 24, 10:26
Leírok egy tapasztalatot, amire egyenlőre nem tudom a választ, jó lenne megoldást találni. Ha bekötöm a motor árnyékot, (LPT port ház, ami egyben a PC föld) Akkor magától elkezd menni a motor lassan, és össze-vissza. Ha az árnyékot nem kötöm sehová, akkor jó, működik rendesen. Tehát olyan, mintha zavart szedne össze, mintha antennaként viselkedne az árnyékolás, ami zavart visz be a rendszerbe. Ha ugye sehová sincs kötve,akkor tökéletesen megy minden motor.
Az LPT és a vezérlő között LIYCY kábel van, és csak az LPT felől van bekötve az árnyékolás. A motor kimenet 4 vezetékkel megy a doboz hátulján lévő csatlakozóra. A csatlakozó és a motor között kb 1,6m van, ez ugyancsak LIYCY kábellel van összekötve. A motor felől az árnyék nincs kötve sehová. A doboz csatlakozó felőli végét, illetve ennek az árnyékolását ha rákötöm a GND-re (LPT ház, vagy Táp GND) Akkor van a probléma.
Köszönöm.
Az LPT és a vezérlő között LIYCY kábel van, és csak az LPT felől van bekötve az árnyékolás. A motor kimenet 4 vezetékkel megy a doboz hátulján lévő csatlakozóra. A csatlakozó és a motor között kb 1,6m van, ez ugyancsak LIYCY kábellel van összekötve. A motor felől az árnyék nincs kötve sehová. A doboz csatlakozó felőli végét, illetve ennek az árnyékolását ha rákötöm a GND-re (LPT ház, vagy Táp GND) Akkor van a probléma.
Köszönöm.
Cím: Re:Léptetőmotor
Írta: Dakota25 Dátum 2013 március 24, 10:42
Írta: Dakota25 Dátum 2013 március 24, 10:42
Csak egy tipp:
Sűrűn találkozom az érintésvédelmi valamint zavarszűrő rendszerek keveredéséből származó parazita jelenségekkel. Ez is gyanús első olvasatra.
Nézd végig, hogy a földelendő típusú tápegységek földelése rendben van-e, nem keveredik-e a rendszerben kettős szigetelésű elemekkel a földelt cucc.
A jelenség többnek tűnik földhurok-, vagy rádiózavarnál. Látatlanban én valami zavarszűrő kondenzátor hibaáramát keresgélném. Ha bármelyik készülék fémtestét kézfejjel finoman simítva biszereg a bőröd (mintha remegne a lemez), nyomon vagyunk.
Sűrűn találkozom az érintésvédelmi valamint zavarszűrő rendszerek keveredéséből származó parazita jelenségekkel. Ez is gyanús első olvasatra.
Nézd végig, hogy a földelendő típusú tápegységek földelése rendben van-e, nem keveredik-e a rendszerben kettős szigetelésű elemekkel a földelt cucc.
A jelenség többnek tűnik földhurok-, vagy rádiózavarnál. Látatlanban én valami zavarszűrő kondenzátor hibaáramát keresgélném. Ha bármelyik készülék fémtestét kézfejjel finoman simítva biszereg a bőröd (mintha remegne a lemez), nyomon vagyunk.
Cím: Re:Léptetőmotor
Írta: a86ifm7g5 Dátum 2013 március 24, 12:19
Írta: a86ifm7g5 Dátum 2013 március 24, 12:19
Közben, fejlemények:
Ha a motor árnyékolásokat összekötöm egymással, már akkor jelentkezik egyfajta hiba. Mégpedig az egyik motor járása darabossá válik. Jelzem, az árnyékolást nem kötöttem még sehová, csak egymással össze. Aztán ha ezt az összekötött árnyékot a földre kötöm, (Zöld-sárga) ismét azt tapasztalom, hogy hatványozottabban darabos lesz a motor járása. Ha az árnyékolást se egymással, se sehova nem kötöm, minden probléma megszűnik. A lakásban van földelés, és (gondolom) be is van kötve a hálózatba. Társasházban lakom.
Ha a motor árnyékolásokat összekötöm egymással, már akkor jelentkezik egyfajta hiba. Mégpedig az egyik motor járása darabossá válik. Jelzem, az árnyékolást nem kötöttem még sehová, csak egymással össze. Aztán ha ezt az összekötött árnyékot a földre kötöm, (Zöld-sárga) ismét azt tapasztalom, hogy hatványozottabban darabos lesz a motor járása. Ha az árnyékolást se egymással, se sehova nem kötöm, minden probléma megszűnik. A lakásban van földelés, és (gondolom) be is van kötve a hálózatba. Társasházban lakom.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2013 március 24, 12:46
Írta: s7manbs8 Dátum 2013 március 24, 12:46
Ha bizsereg a kezed, akkor az mit jelent ?
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2013 március 24, 12:55
Írta: jv7pu3a5p Dátum 2013 március 24, 12:55
De miért akarod árnyákolni a motor és vezérlő közti vezetéket? Teljesen felesleges. Kis jelszint esetén indokolt az árnyékolás, de ahol több amper szaladgál, ott nem.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2013 március 24, 13:10
Írta: keri Dátum 2013 március 24, 13:10
Vagyis azt mondod földhurkot csinálsz?
Akkor nincs min csodálkozni.
Ugye a földet mindenki a konnektorból kapja.
Két cucc van bedugva, a számítógép és a vezérlő, tehát a kettőnek a földjét nem kéne összekötni.
Legalább a jel vezetékeknél érdemes erre figyelni, motornál nem hiszem hogy gondot okozna, de nekem ott nincs árnyékolás, csak sima sodort érpárok fázisonként, és bízom benne, hogy a bifiláris vezeték miatt nem szór meg semmit :)
Egyszer amikor összefogtam az LPT kábelt az egyik motor vezetékével akkor meghülyült, de amúgy teljesen zavarmentes a rendszerem.
Akkor nincs min csodálkozni.
Ugye a földet mindenki a konnektorból kapja.
Két cucc van bedugva, a számítógép és a vezérlő, tehát a kettőnek a földjét nem kéne összekötni.
Legalább a jel vezetékeknél érdemes erre figyelni, motornál nem hiszem hogy gondot okozna, de nekem ott nincs árnyékolás, csak sima sodort érpárok fázisonként, és bízom benne, hogy a bifiláris vezeték miatt nem szór meg semmit :)
Egyszer amikor összefogtam az LPT kábelt az egyik motor vezetékével akkor meghülyült, de amúgy teljesen zavarmentes a rendszerem.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2013 március 24, 13:13
Írta: keri Dátum 2013 március 24, 13:13
Ez a bizsergés akkor van, ha zavarszűrős tápot, földeletlen aljzatba kötöm.
Olyankor 110V mérhető a fém ház és a valós föld között, persze elhanyagolható árammal.
Olyankor 110V mérhető a fém ház és a valós föld között, persze elhanyagolható árammal.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2013 március 24, 13:14
Írta: keri Dátum 2013 március 24, 13:14
Azt hogy rég voltál nővel? [#crazya]
Cím: Re:Léptetőmotor
Írta: keri Dátum 2013 március 24, 13:16
Írta: keri Dátum 2013 március 24, 13:16
Apropó, a vezérlőd bemenete mennyire zavar védett?
Opto leválasztás, vagy legalább ~1K földre húzás van?
Opto leválasztás, vagy legalább ~1K földre húzás van?
Cím: Re:Léptetőmotor
Írta: a86ifm7g5 Dátum 2013 március 24, 13:18
Írta: a86ifm7g5 Dátum 2013 március 24, 13:18
Kipróbáltam több verziót. Csináltam direkt földhurkot is, meg direkt meg is szüntettem. Az az érdekes, hogy ha az árnyékolásokat kötöm csak össze magukban, akkor is van darabos járás. No de csak mint jelenség érdekel ez a probléma. A vezérlő és a motor között kb 1,5m van. Ez nem nagy távolság, nem kötöm be az árnyékot a motor kábelen.
A jel vezeték az árnyékolt.
A jel vezeték az árnyékolt.
Cím: Re:Léptetőmotor
Írta: a86ifm7g5 Dátum 2013 március 24, 13:22
Írta: a86ifm7g5 Dátum 2013 március 24, 13:22
A vezérlő bemenete zavar védett. (STEP;DIR) 5,6K táp felé és 100p GND felé.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2013 március 24, 14:15
Írta: keri Dátum 2013 március 24, 14:15
Hát akkor passz.
Arra gyanakodnék, hogy valahol meg van szakadva a jel áramköre, és csak szórt jelet vesz, amire értelem szerűen bármi rákeveredhet.
Egyszer egy enkóderrel jártunk így. Rossz vezetéket rakott bele a gyártó, és csak kapacitív csatolással működött....ahhoz képest viszont meglepően jól.
Arra gyanakodnék, hogy valahol meg van szakadva a jel áramköre, és csak szórt jelet vesz, amire értelem szerűen bármi rákeveredhet.
Egyszer egy enkóderrel jártunk így. Rossz vezetéket rakott bele a gyártó, és csak kapacitív csatolással működött....ahhoz képest viszont meglepően jól.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2013 március 24, 14:17
Írta: keri Dátum 2013 március 24, 14:17
Jó vólna szkópal belenézni a jel vonal több pontjába, hogy mégis mit lát a vezérlő IC a hasznos jelből és mit, amire darabosan kezd mozogni.
Cím: Re:Léptetőmotor
Írta: a86ifm7g5 Dátum 2013 március 24, 14:51
Írta: a86ifm7g5 Dátum 2013 március 24, 14:51
Értem. Viszont ha nincs árnyék, akkor órákig tökéletes, hiba nélkül. :)
Cím: Re:Léptetőmotor
Írta: a86ifm7g5 Dátum 2013 március 24, 14:56
Írta: a86ifm7g5 Dátum 2013 március 24, 14:56
A jel vezetéket magam gyártottam, az hibátlan. Ellenőriztem, mikor beépítettem. Az is egyébként 3x0,22-es LIYCY. Igazából nem tudom a jelenség magyarázatát. Viszont az már az X aktát súrolja, hogy mikor a motor árnyékokat összekötöm önmagukban, és azokat sehová sem kötöm, akkor is darabos lesz az egyik motor.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2013 március 24, 15:26
Írta: s7manbs8 Dátum 2013 március 24, 15:26
Nélam a saját vezérlőmben, az LPT kábel után vagy 1k-10nF van szűrés, akkor lett zavartalan a jel pl. az a 100pF lehet kevés.
Cím: Re:Léptetőmotor
Írta: f35ezvjs Dátum 2013 március 25, 20:18
Írta: f35ezvjs Dátum 2013 március 25, 20:18
Sziasztok!
Van három léptetőmotorom de még kutatom a jól
kihasználhatóságát.
1db HYBRID-SCHRITTMOTOR TYP:HY200-3450-350A8
2DB SIGMA INSTRUMENTS.INC MODEL 21-3450D200-F1.2
Valaki vett ilyet itt a fórumon.
kérdezném ismeri e valaki.
az MSDD 80 8.2 vezérlővel használnám
a motorok kb 85mm átmérő és 125mm hosszúak nema 34 es felgogás. a súlya sem csekély
Van három léptetőmotorom de még kutatom a jól
kihasználhatóságát.
1db HYBRID-SCHRITTMOTOR TYP:HY200-3450-350A8
2DB SIGMA INSTRUMENTS.INC MODEL 21-3450D200-F1.2
Valaki vett ilyet itt a fórumon.
kérdezném ismeri e valaki.
az MSDD 80 8.2 vezérlővel használnám
a motorok kb 85mm átmérő és 125mm hosszúak nema 34 es felgogás. a súlya sem csekély
Cím: Re:Léptetőmotor
Írta: a86ifm7g5 Dátum 2013 március 31, 21:06
Írta: a86ifm7g5 Dátum 2013 március 31, 21:06
Van egy ilyen motorom. Erről hogyan lehet kíméletesen lehúzni a bordáskereket? Csapágylehúzó sajnos nem fér alá.
Köszi a tippeket!
Cím: Re:Léptetőmotor
Írta: a86ifm7g5 Dátum 2013 március 31, 21:07
Írta: a86ifm7g5 Dátum 2013 március 31, 21:07
Ha a kép nem lenne látható: 103-771-1242 típusú Sanyo Denki motor
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 március 31, 21:17
Írta: 000000000 Dátum 2013 március 31, 21:17
A motoron ha fém a kerék és semmilyen rögzítés nincs rajta akkor meg kell melegíteni hogy a ragasztó elengedje.
Viszont ha sajtolva van akkor csak a nyers erő segít, de semmi esetre ne üssed a tengelyt !!!
Cím: Re:Léptetőmotor
Írta: a86ifm7g5 Dátum 2013 március 31, 22:04
Írta: a86ifm7g5 Dátum 2013 március 31, 22:04
Sárgaréz a kerék. Óvatosan melegítettem, de meg sem moccan. Úgy döntöttem, nem melengetem tovább, nehogy károsodjon a motor. Megpróbálom óvatosan lefűrészelni, lereszelni róla.
Köszönöm a tippet!
Köszönöm a tippet!
Cím: Re:Léptetőmotor
Írta: guliver83 Dátum 2013 március 31, 22:12
Írta: guliver83 Dátum 2013 március 31, 22:12
Egy vasfűrész el sem tudod képzelni mi mindenre képes!!!
Cím: Re:Léptetőmotor
Írta: Sz.József Dátum 2013 március 31, 22:13
Írta: Sz.József Dátum 2013 március 31, 22:13
Satuban szorítsd meg izomból az Sr kereket...
Azután fordíts 90 fokot és ismételd meg...
Ezután már könnyű dolgod lesz.
Azután fordíts 90 fokot és ismételd meg...
Ezután már könnyű dolgod lesz.
Cím: Re:Léptetőmotor
Írta: a86ifm7g5 Dátum 2013 március 31, 22:23
Írta: a86ifm7g5 Dátum 2013 március 31, 22:23
Ott a pont! Ezzel a módszerrel nagyon könnyen leszedtem!!! Az összeszorítás hatására ugye oválissá nyomtam, majd 90 fokkal ismét oválissá, és már el is engedte a tengely.
Hálásan kösznöm a segítséget!
Hálásan kösznöm a segítséget!
Cím: Re:Léptetőmotor
Írta: a86ifm7g5 Dátum 2013 március 31, 23:28
Írta: a86ifm7g5 Dátum 2013 március 31, 23:28
Meg kell még szokni a "válasz" kattintást. :) Szóval köszönöm Józsi, ez az ötlet teljes mértékben bejött.
Cím: Re:Léptetőmotor
Írta: h2j6ycpem Dátum 2013 április 02, 18:08
Írta: h2j6ycpem Dátum 2013 április 02, 18:08
Üdvözlök mindenkit a fórumon!
Pár infóra lenne szükségem.
Használ-e valaki MDrive 23 léptetőmotort (dioda.hu D06015 számu hirdetésben levő) Mach3 vezérléssel?
Ha igen kérem ossza meg a tapasztalatait, hogy hogyan illesztette össze az LPT portot a MDrive 23 léptetőmotor saját vezérlőjével, vagy esetleg más megoldást alkalmazott?
Kíváncsian várom a megoldásokat.
Előre is köszönöm a segítségeteket.
Pár infóra lenne szükségem.
Használ-e valaki MDrive 23 léptetőmotort (dioda.hu D06015 számu hirdetésben levő) Mach3 vezérléssel?
Ha igen kérem ossza meg a tapasztalatait, hogy hogyan illesztette össze az LPT portot a MDrive 23 léptetőmotor saját vezérlőjével, vagy esetleg más megoldást alkalmazott?
Kíváncsian várom a megoldásokat.
Előre is köszönöm a segítségeteket.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 április 04, 11:59
Írta: 000000000 Dátum 2013 április 04, 11:59
Alapból természetesen NEM működik a mach3-al !
Ehhez kell egy Step dir +10/-10 voltos átalakító
Tehát még rá kell költened úgy 20-25 ezer forintot és akkor lehet belőle csinálni egy hasonló rendszer mint itt a videón is látható.
Ezután természetesen kompatibilis is lesz a szoftverrel.
ITT a VIDEÓ !!!
Bal oldalt hagyományos nyílt hurkú léptető vezérlő látható míg a jobb oldalon egy zárt hurkú rendszer.
Szemmel látható a különbség , sőt zongorázni is lehetne! [#hehe]
Cím: Re:Léptetőmotor
Írta: h2j6ycpem Dátum 2013 április 04, 22:28
Írta: h2j6ycpem Dátum 2013 április 04, 22:28
Köszönöm az infot. Azt hiszem még nem vállalkozom erre a feladatra, egyszerűbb lesz a már meglévőt összerakni. Azt gondoltam, hogy közvetlenül nem megy, hisz a leírásban más a vezérlés., de mivel léptetőmotor biztos van rá megoldás.
Még egyszer köszönöm.
Még egyszer köszönöm.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 április 05, 00:04
Írta: 000000000 Dátum 2013 április 05, 00:04
Legrosszabb esetben lebombázod a motor végéről a vezérlést és csak a csupasz motor használod egy Leadshine MSD vagy MSDD vezérlővel.
Ha még nem beruháztál ebbe, akkor inkább ebből a pénzből vegyél a T2CNC-nál motorokat és vezérlőt.
Drágább lesz, de azt legalább tudod használni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 április 06, 09:12
Írta: 000000000 Dátum 2013 április 06, 09:12
Pál-nak!
Elmondhatom amit tudok (fém megmunkálására alkalmas gépet akartunk):
-a léptető motorok nagy nyomatékát tartottam erre a célra jónak
-mivel megjelent a piacon az ennek az encoderes változata, hát rögtön döntöttem
-motorok: 8Nm 2 fázisú 1000-es encoderrel
-motor vezérlők:HBS-80 8.2 (1600-as mikrostep felbontással jelenleg beállítva)
-CSMIO/IP-M 4 tengelyes CNC Ethernet mozgásvezérlő
XYZ tengelyek direkt hajtás, 5mm orsó emelkedés.
Az A forgótengely most készül (ua. motor, vezérlő)
Elmondhatom amit tudok (fém megmunkálására alkalmas gépet akartunk):
-a léptető motorok nagy nyomatékát tartottam erre a célra jónak
-mivel megjelent a piacon az ennek az encoderes változata, hát rögtön döntöttem
-motorok: 8Nm 2 fázisú 1000-es encoderrel
-motor vezérlők:HBS-80 8.2 (1600-as mikrostep felbontással jelenleg beállítva)
-CSMIO/IP-M 4 tengelyes CNC Ethernet mozgásvezérlő
XYZ tengelyek direkt hajtás, 5mm orsó emelkedés.
Az A forgótengely most készül (ua. motor, vezérlő)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 április 06, 09:29
Írta: 000000000 Dátum 2013 április 06, 09:29
Kösz az infót!
Főleg az érdekelne hogy az encodert mint egy szervó használja, vagy mint egy mankó működik az esetleges hibák kiküszöbölésére.
Magyarán a mikrolépések ellenére a felbontás az encoder felbontása marad, vagy a vezérlő csak nagyjából a hiba kiküszöbölőként használja ?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 április 06, 09:59
Írta: 000000000 Dátum 2013 április 06, 09:59
Ezen én is gondolkodom, mert a Mach-ba a mikrolépés szerinti felbontást kell beírni (akkor pontos az elmozdulás).
A szervós finombehangolást nem tudtuk tegnap megcsinálni, mert egy USB-COM1 port kábelt kell hozzá csinálni. Igy a túllengést nem látom még.
Már azon is gondolkodtam, hogy megy e most a szervó? Ne de ez az őrült motor fordulatszám sem érthető számomra (miért nem esik a nyomatéka).
Van még itt még kérdés dögivel, de amit eddig produkált az hihetetlen.
A szervós finombehangolást nem tudtuk tegnap megcsinálni, mert egy USB-COM1 port kábelt kell hozzá csinálni. Igy a túllengést nem látom még.
Már azon is gondolkodtam, hogy megy e most a szervó? Ne de ez az őrült motor fordulatszám sem érthető számomra (miért nem esik a nyomatéka).
Van még itt még kérdés dögivel, de amit eddig produkált az hihetetlen.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 április 06, 10:23
Írta: 000000000 Dátum 2013 április 06, 10:23
Egyszerű kideríteni hogy szervó üzemmód működik vagy sem.
Erőszakkal mint a #3915 hozzászólásban látható videón tekerd el a tengelyt.
Ha nem történik semmi akkor nem megy ha visszateker akkor van valami.
A valami alatt meg értem azt hogy az elkóder felbontása között visszateker.
A konstruktőrök hasomlóan gondolkoznak mint én, józan paraszti ésszel, akkor utána újra beállítaná azokat a áramokat a tekercseken mielőtt az utolsó step és a hiba jel között érkezett.
Így ugyanabba mikrolépésbe térne vissza, az enkóder meg megadja melyik 200 egész lépésben volt ez a mikrolépés.
De én nem érthetek ehhez [#hehe]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 április 06, 10:32
Írta: 000000000 Dátum 2013 április 06, 10:32
Van időm mindent lépésről lépésre kideríteni (na egy pajszert odakészítek, hogy ezt a motort tartó állásban megforgassam).[#vigyor5]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 április 06, 10:44
Írta: 000000000 Dátum 2013 április 06, 10:44
Azért a pajszer kicsit túlzás. [#papakacsint]
Lehet hogy én vagyok jó erőben, de a 12Nm-es is minden további nélkül áttekertem.

Lehet hogy én vagyok jó erőben, de a 12Nm-es is minden további nélkül áttekertem.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 április 06, 16:07
Írta: istvan58 Dátum 2013 április 06, 16:07
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 április 06, 19:55
Írta: 000000000 Dátum 2013 április 06, 19:55
A videón 2Nm-es motorral bírkózik a faszi, az enyém meg 8Nm. Na de lapozzunk. Megy nálam is az encoder.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 április 06, 20:36
Írta: istvan58 Dátum 2013 április 06, 20:36
Igen ez a kisebbik verzió, HBS57, de ugyanúgy müxik.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 április 06, 21:07
Írta: 000000000 Dátum 2013 április 06, 21:07
Ígéretesnek tűnik a dolog, de itt csak az az egy kérdés hogy szökik el az erő a motorból a fordulatszám növekedésével ?
Mert ha a nyomatékét képes lenne 3000RPM-ig megtartani akkor simán versenytársa lenne az AC szervó hajtásoknak.
Ezt viszont kétlem mivel a léptetőmotor a kialakításából adódóan képtelen a nyomaték tartásra nagyobb fordulatszámon.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 április 06, 21:27
Írta: istvan58 Dátum 2013 április 06, 21:27
Igen, nagy fordulaton csökken a nyomaték,mint minden léptetőmotornál. A leadshine honlapjan látható a nyomaték/fordulat görbe
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 április 07, 08:56
Írta: 000000000 Dátum 2013 április 07, 08:56
Ez a nyomaték görbe után lehet hogy könnyelmű kijelentés volt az hogy versenytársa lehet az AC szervóknak.
Sajnos az encoderes visszacsatolás se tud csodát tenni a léptetőmotorral.
Lehet hogy A BLDC irányba kellene kacsintgatni lineáris nyomaték ügyben.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2013 április 07, 12:42
Írta: s7manbs8 Dátum 2013 április 07, 12:42
Tegnap még csak 0RPM-ig jutottam ... :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 április 08, 10:51
Írta: 000000000 Dátum 2013 április 08, 10:51
Szerintem meg a felhasználás célja dönti el hova jó a léptető és hova jó az AC motoros szervó.
Cak néhány jó tulajdonsága a szervós léptetőnek:
- Nem kell mágnes fék (esetleg ellensúly) még nagy tömegű Z esetén sem
- Nagyon nagy indítási nyomaték, emiatt jóval nagyobb gyorsítási érték adható
- Nincs szükség lassító áttétel alkalmazására és minden esetben direkt hajtás használható még a 4. forgótengelyes alkalmazás esetén is
- Fém megmunkálási célú gépek sebességéhez jól illeszthető
Az meg hab a tortán, hogy egy 200W-os AC motor folyamatos nyomatékát (0,64Nm) ez tudja 3000-es fodulaton
Az meg természetes,hogy gravírozési vagy lézer célra más sebesség tartmányú szervót célszerű alkalmazni.
Cak néhány jó tulajdonsága a szervós léptetőnek:
- Nem kell mágnes fék (esetleg ellensúly) még nagy tömegű Z esetén sem
- Nagyon nagy indítási nyomaték, emiatt jóval nagyobb gyorsítási érték adható
- Nincs szükség lassító áttétel alkalmazására és minden esetben direkt hajtás használható még a 4. forgótengelyes alkalmazás esetén is
- Fém megmunkálási célú gépek sebességéhez jól illeszthető
Az meg hab a tortán, hogy egy 200W-os AC motor folyamatos nyomatékát (0,64Nm) ez tudja 3000-es fodulaton
Az meg természetes,hogy gravírozési vagy lézer célra más sebesség tartmányú szervót célszerű alkalmazni.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2013 április 08, 21:01
Írta: s7manbs8 Dátum 2013 április 08, 21:01
Nem akart menni a motorom, addig-addig erőltettem, a panelen egy ellenállás letestelt GND-re ... így kimaradt egy fázis a léptetésből és akadozott szegény, na most hátha meg tudom szegelgetni a Z tengelyt kiderül bírja e hajtani, lehet kicsi lesz a motor.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2013 április 09, 02:24
Írta: s7manbs8 Dátum 2013 április 09, 02:24
Léptetővezérlővel kísérletezek és valami nagyobb motorral is jó lenne megtesztelni, valakinek van ilyenje ? NEMA34 akár valami több N erős, több Amper igényű unipolárisan hajtható ?
FET végfoka van diszkrét alkatrészes. Processzoros vezérlésű játékszer lesz.
FET végfoka van diszkrét alkatrészes. Processzoros vezérlésű játékszer lesz.
Cím: Re:Léptetőmotor
Írta: se6a9e636 Dátum 2013 április 13, 10:45
Írta: se6a9e636 Dátum 2013 április 13, 10:45
Sziasztok!Tudna valaki nekem segíteni?
Típusa: kh56km2U014 erröl a léptetőmotorrol van szó a nyomaték:0,7Nm.Nem régen belefogtam egy hobby CNC gép építésébe.Még nagyon kezdő vagyok ezért kérnék egy kis segítséget.Tehát ez a motor megfelelő lehet a tengelyek mozgatásához?
Típusa: kh56km2U014 erröl a léptetőmotorrol van szó a nyomaték:0,7Nm.Nem régen belefogtam egy hobby CNC gép építésébe.Még nagyon kezdő vagyok ezért kérnék egy kis segítséget.Tehát ez a motor megfelelő lehet a tengelyek mozgatásához?
Cím: Re:Léptetőmotor
Írta: se6a9e636 Dátum 2013 április 13, 12:29
Írta: se6a9e636 Dátum 2013 április 13, 12:29
Bocsi rossz topic-ot használtam Elnézést!
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2013 április 30, 19:12
Írta: ht0cjk58i Dátum 2013 április 30, 19:12
Helló.
Lenne valakinek TB6560-ra épülő nyák terve ami működik is?
Lenne valakinek TB6560-ra épülő nyák terve ami működik is?
Cím: Re:Léptetőmotor
Írta: robroy007 Dátum 2013 április 30, 22:08
Írta: robroy007 Dátum 2013 április 30, 22:08
Kulcsár Zolit keresd neki biztos van
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2013 május 02, 06:00
Írta: Szalai György Dátum 2013 május 02, 06:00
Meg tudná-e valaki mondani, hogy mi okból vezetik ki a gyártók a hat vezetékes unipoláris léptetőmotorok A2 és B2 tekercsközepeit külön-külön vezetéken? Miért nem egyetlen vezetéken vezetik ki a két tekercsközepet, már a motoron belül közösítve?
Hiszen a felhasználók ezeket rövid úton összekötik, és egy éren továbbítják az unipoláris maghajtó elektronikáig.
(Az ősidőkben ennek tudtam a műszaki okát, hogy a két tekercspár külön-külön soros teljesítmény ellenállást igényelt az emelt feszültségű, gyorsított működtetés miatt.)
Hiszen a felhasználók ezeket rövid úton összekötik, és egy éren továbbítják az unipoláris maghajtó elektronikáig.
(Az ősidőkben ennek tudtam a műszaki okát, hogy a két tekercspár külön-külön soros teljesítmény ellenállást igényelt az emelt feszültségű, gyorsított működtetés miatt.)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 május 02, 07:21
Írta: 000000000 Dátum 2013 május 02, 07:21
Azért vezetik ki, hogy lehessen bipoláris vezérlőhöz is bekötni a motort.
Cím: Re:Léptetőmotor
Írta: egux4t8tf Dátum 2013 május 16, 16:26
Írta: egux4t8tf Dátum 2013 május 16, 16:26
sziasztok!
meg tudja nekem valaki mondani a step/dir jelek paramétereit? Pc nélkül kellene léptecset vezérelnem, de nem találtam semmi konkrétat róla.
meg tudja nekem valaki mondani a step/dir jelek paramétereit? Pc nélkül kellene léptecset vezérelnem, de nem találtam semmi konkrétat róla.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2013 május 16, 16:56
Írta: s7manbs8 Dátum 2013 május 16, 16:56
Milyen paraméterüket ?
Cím: Re:Léptetőmotor
Írta: etc77f5nr Dátum 2013 május 16, 17:08
Írta: etc77f5nr Dátum 2013 május 16, 17:08
Sok mindentől függ. Pl motor, mechanika, elektronika. Mach3 alapján eltudsz indulni. Vagy arra vagy kíváncsi, hogy hogyan működik?
Cím: Re:Léptetőmotor
Írta: wcsxp0uxa Dátum 2013 május 16, 17:24
Írta: wcsxp0uxa Dátum 2013 május 16, 17:24
Nagyon vezérlő függő ami nekem bevált az a 2-20us- ig lévő tartomány (2 nél már nem nagyon világít a step led a meghajtómon , de működik nekem) , bár én hangra szoktam belőni.
A dir jelnek általában 4-5 us -el előbb kellene érkeznie , de ennek is vezérlő függő az értéke .
Nagyobb jelszélességgel is működik csak a hangja "ércesebb" lesz ,illetve proc. időpocsékolás.
A dir jelnek általában 4-5 us -el előbb kellene érkeznie , de ennek is vezérlő függő az értéke .
Nagyobb jelszélességgel is működik csak a hangja "ércesebb" lesz ,illetve proc. időpocsékolás.
Cím: Re:Léptetőmotor
Írta: vuk Dátum 2013 május 16, 17:28
Írta: vuk Dátum 2013 május 16, 17:28
Szia. Hát így általánosságban, bár ez a vezérlő bemenetétől is függ. Ha a jelalakokra gondolsz azok 5V-os TTL jelekkel vezérelhetők. Tesztelni tudod a vezérlőt,ha a STEP bemenetre kötsz egy négyszögjel generátort, és változtatod a frekvenciáját/sebesség növelése,csökkentése. A DIR bemenet ha alacsony szinten van egyik irányba, ha magas szinten másik irányba léptet a vezérlő.
Cím: Re:Léptetőmotor
Írta: vuk Dátum 2013 május 16, 17:55
Írta: vuk Dátum 2013 május 16, 17:55
Lehet nem egyértelműen fogalmaztam, írtam le.
Pontosítva fel vagy lefutó "éleket" figyel a vezérlő. De ugye ez is típus függő.
Pontosítva fel vagy lefutó "éleket" figyel a vezérlő. De ugye ez is típus függő.
Cím: Re:Léptetőmotor
Írta: etc77f5nr Dátum 2013 május 16, 18:28
Írta: etc77f5nr Dátum 2013 május 16, 18:28
Szerintem ne555-el tudsz step jelet generálni a dir-t pedig manuálisan. Nem tudom mik a terveid.
Cím: Re:Léptetőmotor
Írta: egux4t8tf Dátum 2013 május 17, 11:36
Írta: egux4t8tf Dátum 2013 május 17, 11:36
anyagtovábbítóba kellene, a fordulatszám szabályzása alapkövetelmény, ráadásul ezt 0 és max fordulat között kellene állítani. mikrovezérlővel gondoltam megoldani, mert így a sebességet is ki tudom íratni kijelzőre. ezért kérdeztem a paramétereket hogy valami alapján el tudjak indulni. még annyi kérdésem lenne hogy egy négszögjelhez mekkora szögelfordulás tartozik (az egyszerűség kedvéért 1,8 fokos motor és egészlépéses üzemmód). logikusan 1,8 fokot kellene lépnie, de inkább rákérdezek.
Cím: Re:Léptetőmotor
Írta: etc77f5nr Dátum 2013 május 17, 14:26
Írta: etc77f5nr Dátum 2013 május 17, 14:26
Természetesen egy step jel 1.8° egész lépésnél.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 május 17, 18:17
Írta: 000000000 Dátum 2013 május 17, 18:17
Sokáig így hajtottam a gépem három tengelyét. [#eljen]
Cím: Re:Léptetőmotor
Írta: etc77f5nr Dátum 2013 május 17, 20:11
Írta: etc77f5nr Dátum 2013 május 17, 20:11
Én NE555+4017+FET kombóval pörgettem az unipolárist tesztként :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 május 19, 15:56
Írta: 000000000 Dátum 2013 május 19, 15:56
Projektemben két léptetőmotort kell használjak. Tudna valaki ötleteket adni milyen mechanikai rendszert lehetne létrehozni kevés költségvetéssel?
Cím: Re:Léptetőmotor
Írta: Lpeti11 Dátum 2013 május 19, 16:34
Írta: Lpeti11 Dátum 2013 május 19, 16:34
Üdvözletem.
Egy bekötési rajz jó lenne szerintem mindenkinek.
Nekem is.... Ha lehetséges.[#worship]
Egy bekötési rajz jó lenne szerintem mindenkinek.
Nekem is.... Ha lehetséges.[#worship]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 május 19, 16:49
Írta: 000000000 Dátum 2013 május 19, 16:49
Nyugodtan hallgathatsz a logikádra.
Ez így logikus.[#nevetes1]
Cím: Re:Léptetőmotor
Írta: etc77f5nr Dátum 2013 május 19, 20:47
Írta: etc77f5nr Dátum 2013 május 19, 20:47
Összedobok egyet. Az az egyetlen baj, hogy amikor a 4 lépés után amikor az 5 lépés resetre megy, nem tudom mennyi idő tellik el persze ms-ban. Ezért a motor forgása nem is tökéletes. De amúgy nem nehéz összerakni, ha ismered a 4017-s ic-t. Van fent egy valag rajz neten knight rider villogó néven. Ott összevan rakva egy 555+4017. A lényeg, hogy az 555 impulzussal lépteti a 4017-t és az 5. lábat visszakell kötni reset lábra. Az első 4 kimenetre pedig kötni kell egy FET-et (diódával), vagy ULN2003 amiben benne van a védődióda. ULN2003-nak adsz tápot (max 35V) 7805-el pedig stabilizálod 555+4017-nek.
Példa
Látszanak a léptetőlábak Q0-Q3-ig 3;2;4;7 a 10-es lábat pedig RESET-re kötöd. Potival pedig a frekit tudod szabályozni.
Példa
Látszanak a léptetőlábak Q0-Q3-ig 3;2;4;7 a 10-es lábat pedig RESET-re kötöd. Potival pedig a frekit tudod szabályozni.
Cím: Re:Léptetőmotor
Írta: Lpeti11 Dátum 2013 május 19, 21:15
Írta: Lpeti11 Dátum 2013 május 19, 21:15
Köszönöm.
Igyekszem megépítemi.
Igyekszem megépítemi.
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2013 május 19, 23:41
Írta: Vetesi75 Dátum 2013 május 19, 23:41
Ezért szeretem jobban a bináris számláló+dekódoló összeállítást, mert egyenletesebb a motor járása.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 május 19, 23:43
Írta: 000000000 Dátum 2013 május 19, 23:43
És, az hogy van?
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2013 május 20, 00:14
Írta: Vetesi75 Dátum 2013 május 20, 00:14
Így
74193-assal még step-dir rendszerűvé is válhat.
74193-assal még step-dir rendszerűvé is válhat.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 május 20, 07:44
Írta: 000000000 Dátum 2013 május 20, 07:44
Elég "borzalmas" dolgokat látok itt ezekkel a step motor játék kapcsolási rajzokkal kapcsolatosan. Ezek így a mai korszerű kis Ohm-os ellenállású motorokhoz alkalmatlanok, mert:
- az ULN IC maximális árama csak 500 mA
- nincs áramgenerátor, így egyből el is szállnak ezek a meghajtók álló motor esetén, így a 35 V tápfesz de még a 12 V is igencsak necces.
- Unipoláris, azon belül is szakszerűtlen tekercsgerjesztéssel hajtják a motort, így 1-2 1/s fordulat után a motorok nyomatéka közel nulla lesz a már említett áramgenerátor hiánya miatt is.
Magyarul ezeket rajzokat így kár megépíteni, vagy csak nagyon korlátozott keretek közt alkalmazhatóak.
- az ULN IC maximális árama csak 500 mA
- nincs áramgenerátor, így egyből el is szállnak ezek a meghajtók álló motor esetén, így a 35 V tápfesz de még a 12 V is igencsak necces.
- Unipoláris, azon belül is szakszerűtlen tekercsgerjesztéssel hajtják a motort, így 1-2 1/s fordulat után a motorok nyomatéka közel nulla lesz a már említett áramgenerátor hiánya miatt is.
Magyarul ezeket rajzokat így kár megépíteni, vagy csak nagyon korlátozott keretek közt alkalmazhatóak.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2013 május 20, 08:29
Írta: besirkyjh Dátum 2013 május 20, 08:29
Szia Tibor
Nem látom itt a beirásod elörébb !
Ajánlani is fogsz valamit ?
Nem akarok vitatkozni veled de hagyd már hogy hobbizzanak kicsit a srácok .
Csak pár dolog ami sántit kicsit .
A léptetök nagy része bontott ( tehát koros ) .
Az ULN emeletesben is megoldhato és akkor .....
A táppal soros izzo nagyon jo áramkorlátozásra .
Stb .
Nem fogok vitatkozni , nincs hozzá türelmem .
Nem látom itt a beirásod elörébb !
Ajánlani is fogsz valamit ?
Nem akarok vitatkozni veled de hagyd már hogy hobbizzanak kicsit a srácok .
Csak pár dolog ami sántit kicsit .
A léptetök nagy része bontott ( tehát koros ) .
Az ULN emeletesben is megoldhato és akkor .....
A táppal soros izzo nagyon jo áramkorlátozásra .
Stb .
Nem fogok vitatkozni , nincs hozzá türelmem .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 május 20, 09:00
Írta: 000000000 Dátum 2013 május 20, 09:00
Ne vicelj már Zoltán! Én azt gondolom, azzal, hogy füstölési, pénzkidobási veszélyre hívtam fel a figyelmet, nem tettem rosszat.
A neten pedig rengeteg L297-re épülő komplett kapcsolás van, lehet válogatni bőven a kereső használatával.
Néhány száz lehetőség pl. itt.
A neten pedig rengeteg L297-re épülő komplett kapcsolás van, lehet válogatni bőven a kereső használatával.
Néhány száz lehetőség pl. itt.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 május 20, 09:02
Írta: 000000000 Dátum 2013 május 20, 09:02
vicelj-> viccelj
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2013 május 20, 09:33
Írta: Vetesi75 Dátum 2013 május 20, 09:33
Teljes mértékben egyetértek megállapításoddal. Az ULN kapuit jól lehetett párhuzamosítani, ritka volt a hibásodás. Ez a "hőskorban" 12V-os robotron, illetve "nagy-floppy" motorokkal hangvezérelt fényeffektbe készült, ahol egy féltenyérnyi tükröt kellett forgatnia kb. 40/min fordulattal. Primitív volta miatt mégis hatalmas előrelépést jelentett, mert a DC-motorok áttételei sajnos nem hülyeségállóak... Esetleges lépésvesztés nem számított, ellenben a egyenletlen járásból fakadó döcögés meglátszott. Készült belőle féllépéses változat is, az inverter sor helyén 7410-es Nand-kapukkal. Féllépés
Elődje a klasszikus 4017-es DTL logikával irányt váltva, ez döcögött rendesen, ráadásul irányváltáskor lépést is vesztett. :) 4017-roncs
DC-motorokhoz az optotriakos végfokozattal zárultak a kísérletek. Ez már komoly alkatrészspórolós megoldásnak számított, általános derültséget okozva hozzáértő körökben... :)
Elődje a klasszikus 4017-es DTL logikával irányt váltva, ez döcögött rendesen, ráadásul irányváltáskor lépést is vesztett. :) 4017-roncs
DC-motorokhoz az optotriakos végfokozattal zárultak a kísérletek. Ez már komoly alkatrészspórolós megoldásnak számított, általános derültséget okozva hozzáértő körökben... :)
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2013 május 20, 09:46
Írta: Vetesi75 Dátum 2013 május 20, 09:46
Emeletest soha nem csináltam belőle, ha két fokozat kevés volt párhuzamosan, akkor STA403 és társai kerültek előtérbe, vagy KT829A.
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2013 május 20, 09:57
Írta: Vetesi75 Dátum 2013 május 20, 09:57
"Ráérős diák koromban" annyit tudtam a léptetőmotorról, hogy létezik. Segítségképp "nem tudom", "az nagyon bonyolult", "az kilincsműves?", stb. instrukciókkal voltunk ellátva... :(
Cím: Re:Léptetőmotor
Írta: etc77f5nr Dátum 2013 május 20, 09:59
Írta: etc77f5nr Dátum 2013 május 20, 09:59
Amint írtam is én PRÓBÁLNI használtam és egy 1.22R 5W ellenállás volt kötve a tápfeszre. Nem nyákot marni építettem, hanem megnézni, egyáltalán megy e a motor.
Cím: Re:Léptetőmotor
Írta: etc77f5nr Dátum 2013 május 20, 10:04
Írta: etc77f5nr Dátum 2013 május 20, 10:04
Emellett nem mindenkinek fekszik otthon L297 és társai :). A kezdő elektronikásoknak pedig tuti, hogy van otthon 555+4017. Egyébként egy PIC16F628-ra is írtam programot, ami forgatja az unipoláris motort és az tökéletes :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 május 20, 10:17
Írta: 000000000 Dátum 2013 május 20, 10:17
Értem én a szándékaidat, de beláthatnád, hogy 35 V táp emlegetése ULN IC-nél úgy, hogy nem írtál semmit a kialakuló áramról, az nagyon veszélyes, és füstgyanús. Maradjunk annyiban ezekkel a megoldásokkal is lehet valamit kezdeni, ha pl. valamilyen kis 40*40 mm-es pár 10 Ohm-os tekercsű pl. nyomtatóból kibontott kis motorral próbálkozunk. Nagyobb fordulatokon is működő mai 1-2 Nm-es motorokhoz erősen javasolt valamilyen áramvédelem, és kicsi tápfesz, max 9-12 V, és legalább 10 A-es Fet-es végfok, hogy legalább az ne füstöljön el.:)
A PIC pedig egyáltalán nem hat meg, mert az Ohm törvényét a végfoknál ott is keményen tudnod kell, egyébként az is füstöl.:)
A PIC pedig egyáltalán nem hat meg, mert az Ohm törvényét a végfoknál ott is keményen tudnod kell, egyébként az is füstöl.:)
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2013 május 20, 12:18
Írta: besirkyjh Dátum 2013 május 20, 12:18
Na látod , megy ez :)
Nem rád vonatkozik de megfigyeltem ha valaki ir valamit ( proba gyanánt ) akkor egyböl egy más megoldást javaslunk neki .Ha azt akarja kipróbálni ám legyen !
Nekem mindenféle kis vacakbol van itthon egy rahedli és van mikor ezt épitem és van mikor azt épitem és van mikor én is boltbol veszem mert mindig más és más a követelmény !
Ezekkel a hiányos infokkal nehéz boldogulni igy elöbb mindig tisztázni kell mi is a feladat .
[#eljen]
Nem rád vonatkozik de megfigyeltem ha valaki ir valamit ( proba gyanánt ) akkor egyböl egy más megoldást javaslunk neki .Ha azt akarja kipróbálni ám legyen !
Nekem mindenféle kis vacakbol van itthon egy rahedli és van mikor ezt épitem és van mikor azt épitem és van mikor én is boltbol veszem mert mindig más és más a követelmény !
Ezekkel a hiányos infokkal nehéz boldogulni igy elöbb mindig tisztázni kell mi is a feladat .
[#eljen]
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2013 május 20, 12:25
Írta: s7manbs8 Dátum 2013 május 20, 12:25
Mindenki másképp csinálja ... :)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2013 május 20, 12:28
Írta: s7manbs8 Dátum 2013 május 20, 12:28
Tranyó meg mindenütt van, rossz TV ben stb ... abból is lehet léptetőt ...
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2013 május 20, 12:31
Írta: besirkyjh Dátum 2013 május 20, 12:31
Szia
Értem én meg valahol igazat is adok a "tapasztaltabbaknak " de képzeld el hogy Neked van egy "tuti" ötleted és azt megosztod itt és jön az özön viz ( holott a Tied is müködik csak máshogy ) .
Annak a hive vagyok hogy abbol hozzuk ki a maximumot amink van .Nem mindenki érti vagy szereti a cnc technologiát de nagyon szeretne a vele készült dolgoknak örülni , probálgatni és ebben kér segitséget .
Értem én meg valahol igazat is adok a "tapasztaltabbaknak " de képzeld el hogy Neked van egy "tuti" ötleted és azt megosztod itt és jön az özön viz ( holott a Tied is müködik csak máshogy ) .
Annak a hive vagyok hogy abbol hozzuk ki a maximumot amink van .Nem mindenki érti vagy szereti a cnc technologiát de nagyon szeretne a vele készült dolgoknak örülni , probálgatni és ebben kér segitséget .
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2013 május 20, 12:32
Írta: s7manbs8 Dátum 2013 május 20, 12:32
Szia, persze, nem is akarok én senkit eltántorítani, csak még egy ötlet, ha az eredeti megoldás kútba esik. :)
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2013 május 20, 12:35
Írta: besirkyjh Dátum 2013 május 20, 12:35
Tompika jutott eszembe akinek a nyakában logott egy doboz a következö felirattal : "mindenböl valamit csinálo gép " , egyre kevesebbszer de én is bele botlok ilyenbe , ötletelek :)
Cím: Re:Léptetőmotor
Írta: etc77f5nr Dátum 2013 május 20, 16:15
Írta: etc77f5nr Dátum 2013 május 20, 16:15
Én úgy építettem meg ezeket az áramköröket, hogy tisztában voltam azzal, hogy miből hogy jöhet ki a füst. Így építettem meg ezeket a "kapcsolásokat" és még 1x leírom csak próba volt ez nem végleges gépbe épített valami.
Cím: Re:Léptetőmotor
Írta: KoLa Dátum 2013 május 22, 22:43
Írta: KoLa Dátum 2013 május 22, 22:43
Tegnap csapágyas lett a plazmavágógép z tengelyének a léptetője!Csúnyán 'bőgött'ezért szétszedtük kicsit!
Ez egy Berger Lahr 6Nm-s motor!
Levettem az tengelycsonk felőli végét a motortornak, és szépen 'csőbehúztam' a forgórészt! mint ahogyan tanultuk...

Közbe eltelt egy nap, megjött az új csapágy a régi nevenincs helyett! a motor dekni lyukas a hátulján is, így a sok füst, por és fémszemcse átjutott a zártcsapágyon és egy kis galacsinban gyűlt össze amit görgetett a motor a csapágy és a forgórész között!látszik a nyoma a forgórészen!

2RS csapágyat tettem bele és helyére került a forgórész!

Utána még jött a java!és ezt már elfelejtettem fotózni!
A deknik nem tudták központosítani a forgórészt a házhoz!fél óráig ütögettem gumikalapáccsal félig meghúzott csavarokkal, mire jó lett!próba szépen megy szinte hangtalanul!
Ennek örömére esztergáltam a nyitott végébe műanyag dugókat porvédőnek!és a többi motornak is! Nem is értem hogy a gyártó! miért nem teszi ezt, egy plazmavágógép függőlegesen álló motorjával?!
Ez egy Berger Lahr 6Nm-s motor!
Levettem az tengelycsonk felőli végét a motortornak, és szépen 'csőbehúztam' a forgórészt! mint ahogyan tanultuk...
Közbe eltelt egy nap, megjött az új csapágy a régi nevenincs helyett! a motor dekni lyukas a hátulján is, így a sok füst, por és fémszemcse átjutott a zártcsapágyon és egy kis galacsinban gyűlt össze amit görgetett a motor a csapágy és a forgórész között!látszik a nyoma a forgórészen!
2RS csapágyat tettem bele és helyére került a forgórész!
Utána még jött a java!és ezt már elfelejtettem fotózni!
A deknik nem tudták központosítani a forgórészt a házhoz!fél óráig ütögettem gumikalapáccsal félig meghúzott csavarokkal, mire jó lett!próba szépen megy szinte hangtalanul!
Ennek örömére esztergáltam a nyitott végébe műanyag dugókat porvédőnek!és a többi motornak is! Nem is értem hogy a gyártó! miért nem teszi ezt, egy plazmavágógép függőlegesen álló motorjával?!
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2013 május 23, 08:27
Írta: ANTAL GÁBOR Dátum 2013 május 23, 08:27
Érdekes lett volna csinálni egy mérést.Szétszedés előtt egy esztergán megpörgetni 3 különböző fordulaton és mérni az üresjárási feszültséget ( esetleg egy kis terhelést ráakasztva egy másik munkapontot ) ( (generátoros üzem, ) Majd a csapágyazás után megismételni. Én egyszer végigcsináltam és minden csőbehúzás ellenére gyengébb lett a mágnes. ( A második mérés feszültségei kb csak 70% osak lettek Legközelebb ne hagyd ki !!!
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2013 május 23, 09:50
Írta: jani300 Dátum 2013 május 23, 09:50
Szépen megfogalmaztad azt ami engem is érdekelt volna .
Cím: Re:Léptetőmotor
Írta: etc77f5nr Dátum 2013 május 23, 11:22
Írta: etc77f5nr Dátum 2013 május 23, 11:22
Az utolsó kérdés jogos, nálunk is nekem kellett parasztmódszerrel leragasztani a motorok végét a plazmavágón :S.
Cím: Re:Léptetőmotor
Írta: Lpeti11 Dátum 2013 május 24, 07:45
Írta: Lpeti11 Dátum 2013 május 24, 07:45
Kicsit tudatlan vagyok...
Miért kell a forgórészt "csőbe húzni"?
Miért kell a forgórészt "csőbe húzni"?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2013 május 24, 08:20
Írta: svejk Dátum 2013 május 24, 08:20
Egyes motorok, melyek AlNiCo mágnessel szereltek elvesztik a mágnesük erejének több mint felét, ha egy pillanatra is megszakad a mágneses erővonalak záródása.
Cím: Re:Léptetőmotor
Írta: etc77f5nr Dátum 2013 május 24, 20:34
Írta: etc77f5nr Dátum 2013 május 24, 20:34
Üdv! Az egyik motorom valószínűleg megy az örök lépkedőmezőre :(. Tudom, hogy nem szabad forgatni a motort amikor a meghajtóra van kötve, persze nem mint az ökör, de megforgattam és nagyon könnyen forog. A másik, ugyanilyen típusú motort nehezen tudom megforgatni. Gondolom a melegedéstől elvesztette a mágnesessége egy részét. Ugyanazon beállítások mellet a "jó" motor simán forog lépésvesztés nélkül, a "rossz" motor pedig befullad. Jól gondolom, hogy kuka?
Cím: Re:Léptetőmotor
Írta: wcsxp0uxa Dátum 2013 május 24, 20:44
Írta: wcsxp0uxa Dátum 2013 május 24, 20:44
Tedd le egy kicsit pihizni , nekem már 1x bejött.
Nincs rá azóta sem logikus magyarázat.(ez újabb típus)
Nincs rá azóta sem logikus magyarázat.(ez újabb típus)
Cím: Re:Léptetőmotor
Írta: etc77f5nr Dátum 2013 május 24, 20:45
Írta: etc77f5nr Dátum 2013 május 24, 20:45
Jó 2 hetet pihent :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 május 24, 20:45
Írta: 000000000 Dátum 2013 május 24, 20:45
Azért csak nézd meg a bekötésének helyességét. És, szakadásra is vizsgáld meg.
És, ha használhatatlannak bizonyulna. Még akkor is hasznosítható lesz az őszi, hatvani talin.
A második léptetőmotor célba dobó versenyen.
Addig is gyakorolhatsz vele:))
Ne alázd meg, a kukába dobással.
[#nemtudom][#wave]
Cím: Re:Léptetőmotor
Írta: wcsxp0uxa Dátum 2013 május 24, 20:46
Írta: wcsxp0uxa Dátum 2013 május 24, 20:46
Nekem másnap visszajött a mágneses tér.(nem szettem szét)
Cím: Re:Léptetőmotor
Írta: etc77f5nr Dátum 2013 május 24, 20:49
Írta: etc77f5nr Dátum 2013 május 24, 20:49
Azért ki nem dobom :) Majd még játszok vele, a szakadással és a bekötéssel nincs baj, mivel előtte üzemelt rendesen.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 május 24, 20:50
Írta: 000000000 Dátum 2013 május 24, 20:50
Most, hogy mondod. Pár éve nekem is volt valami hasonló.
És, némi állás után, rendbe jött.
És, némi állás után, rendbe jött.
Cím: Re:Léptetőmotor
Írta: wcsxp0uxa Dátum 2013 május 24, 20:51
Írta: wcsxp0uxa Dátum 2013 május 24, 20:51
szettem=szedtem
Cím: Re:Léptetőmotor
Írta: cxmcdtrx Dátum 2013 június 06, 20:49
Írta: cxmcdtrx Dátum 2013 június 06, 20:49
Ismét a tisztelt közönség véleményét szeretném kérni.
Ha van egy 3.1 Nm-es léptetö motorom és egy 200W-os, 0,6 Nm-es Yaskawa AC szervóm, Melyiket érdemes feltennem egy faipari gépre? Elsöre rávágnám, hogy AC, de nem tudom, a nyomatékok mennyire mérvadók ennyire eltérö felépítés esetén...
Az AC nyilván képes nagyobb sebességre is, tud pozíció / sebesség üzemmódban is menni, ez mondjuk egy 4. tengelynél hálás dolog.
X,Y,Z Tengelyek meghajtásánál melyikkel járok jobban?
Köszi!
Ha van egy 3.1 Nm-es léptetö motorom és egy 200W-os, 0,6 Nm-es Yaskawa AC szervóm, Melyiket érdemes feltennem egy faipari gépre? Elsöre rávágnám, hogy AC, de nem tudom, a nyomatékok mennyire mérvadók ennyire eltérö felépítés esetén...
Az AC nyilván képes nagyobb sebességre is, tud pozíció / sebesség üzemmódban is menni, ez mondjuk egy 4. tengelynél hálás dolog.
X,Y,Z Tengelyek meghajtásánál melyikkel járok jobban?
Köszi!
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2013 június 07, 07:01
Írta: besirkyjh Dátum 2013 június 07, 07:01
Szia
Érdekes hogy nem jön rá válasz vagy javaslat ?
Legalább 4-en figyelnek pedig .Vagy inkább emailben kerestek meg ?
Na mindegy :) ( erre gondolom lesz észrevétel )
Tulajdon képen meg is válaszoltad a kérdésed .
A magasabb fordulatszám , a zárt hurkú lánc a tápegység a halk járás a kefenélküliség mind mind elönynek számit az AC szervonál .
A magasabb fordulat nem feltétlen jár magasabb gépsebességgel ( mechanikai áttétel ajánlott ) , direkt hajtásnál elég korlátozott a lehetöség ( csapágyak melegedése az orsoanya melegedés, tehetetlenség ,indulo nyomaték stb ) .
Azért az enkoderes visszacsatolás sem leány álom egy léptetös rendszerhez képest !!
Még ma is elég huzosak az árak AC szervo ügyben de megoldhato ha muszály .Az egyszerüsége és potolhatosága a léptetö melett szol és talán még a költsége is ( legalább is kisebb igénybevételü gépeknél , ez is elég tág fogalom ) .
Nagyon jo példa : rábeszélés ( és szerintem info tuláradat miatt ) vásárolva lett egy masina .Az anyag az optimális ( legalább is sok embeknek ) .Lin rendszer legalább 30-as (HiWin ? ) ehhez kb 40mm átméröjü golyos orso és a kb 200W-os AC szervo vezérlés .
Van egy másik gép ami még az infoáradat elött készült ( de már akkor is muszálybol lett megvásárolva ) az 1,5modulos fogasléces léptetömotoros gép a linek saját épitésüek ( homa-made verzio , nem én épitettem öket ) .
A léptetös gép teszi a dolgát és dolgozik amióta a helyén van , az AC szervos gép áll mert problémák vannak vele és hiányzik a szakértelem a megoldáshoz ( ugy mechanikus mint elektromos probléma ).
Lehet nem ez a jellemzö de ilyen is van , és számomra ez kidobott pénznek számit !
Léptetö konra Ac szervó ? Hát nem a léptetö javára fog billenni a mérleg :)
A lényeg az hogy rengeteg info kel hozzá mert egyik sem olyan mellék hajtás amit felteszel és megy egy életen át , néha bele bele kel nyulni és akkor észrevehetö a különbség :)
Jelzem én léptetö párti vagyok , de gondolom idövel váltanom kell !?
Érdekes hogy nem jön rá válasz vagy javaslat ?
Legalább 4-en figyelnek pedig .Vagy inkább emailben kerestek meg ?
Na mindegy :) ( erre gondolom lesz észrevétel )
Tulajdon képen meg is válaszoltad a kérdésed .
A magasabb fordulatszám , a zárt hurkú lánc a tápegység a halk járás a kefenélküliség mind mind elönynek számit az AC szervonál .
A magasabb fordulat nem feltétlen jár magasabb gépsebességgel ( mechanikai áttétel ajánlott ) , direkt hajtásnál elég korlátozott a lehetöség ( csapágyak melegedése az orsoanya melegedés, tehetetlenség ,indulo nyomaték stb ) .
Azért az enkoderes visszacsatolás sem leány álom egy léptetös rendszerhez képest !!
Még ma is elég huzosak az árak AC szervo ügyben de megoldhato ha muszály .Az egyszerüsége és potolhatosága a léptetö melett szol és talán még a költsége is ( legalább is kisebb igénybevételü gépeknél , ez is elég tág fogalom ) .
Nagyon jo példa : rábeszélés ( és szerintem info tuláradat miatt ) vásárolva lett egy masina .Az anyag az optimális ( legalább is sok embeknek ) .Lin rendszer legalább 30-as (HiWin ? ) ehhez kb 40mm átméröjü golyos orso és a kb 200W-os AC szervo vezérlés .
Van egy másik gép ami még az infoáradat elött készült ( de már akkor is muszálybol lett megvásárolva ) az 1,5modulos fogasléces léptetömotoros gép a linek saját épitésüek ( homa-made verzio , nem én épitettem öket ) .
A léptetös gép teszi a dolgát és dolgozik amióta a helyén van , az AC szervos gép áll mert problémák vannak vele és hiányzik a szakértelem a megoldáshoz ( ugy mechanikus mint elektromos probléma ).
Lehet nem ez a jellemzö de ilyen is van , és számomra ez kidobott pénznek számit !
Léptetö konra Ac szervó ? Hát nem a léptetö javára fog billenni a mérleg :)
A lényeg az hogy rengeteg info kel hozzá mert egyik sem olyan mellék hajtás amit felteszel és megy egy életen át , néha bele bele kel nyulni és akkor észrevehetö a különbség :)
Jelzem én léptetö párti vagyok , de gondolom idövel váltanom kell !?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2013 június 07, 11:02
Írta: svejk Dátum 2013 június 07, 11:02
Azt már tudjuk milyen motorjaid vannak, de azt még nem milyen/mekkora géped/mechanikád, amire rá akarod rakni a motorokat és azt sem milyen elvárásaid vannak a géppel kapcsolatban.
Ezek adatok nélkül balgaság lenne ajánlatot tenni.
De ha már megvannak azok a motorok és a gép, akkor egy nap alatt szinte mindkettővel letesztelheted a gépet.
A kísérletek mérések még sosem ártottak egy projectnek sem.
Műszaki végzettségű ember lévén sejtened kellene hogy a motort a "nyomaték hajtja", és valami nem stimmel a 0,6 kontra 3,1 Nm kapcsán.
Induló adatoknak:
Az AC servod 0,6 Nm-t(de inkább 0,7 az szerintem) tud egyenletesen a teljes 0-3000-es fordulatszám tartományban.
A léptetőd, 3,1Nm-t tud álló helyzetben, majd a fordulatszámot emelve ez csökkenni fog.
A 600-as fordulatszámot elérve úgy 1,5-2 Nm-el számolhatsz, felette már drasztikusan fog csökkenni, 1000-es fordulat fölé pedig egyáltalán nem ajánlott menni.
Persze sok függ a léptetőmotor meghajtótól is.
A megoldás a megfelelő illesztés lesz a motorok és mechanika közt, ami gyakorlatilag fogazott szíjhajtásos áttételben fog majd megvalósulni.
A fentiek alapján számolgathatsz már sebességeket akár fejben is a mechanikádra.
A neheze majd később jön, amikor a dinamikai képességeket kell kiszámolni.
De jobb híján ezt is ki lehet tökölni kísérletezgetéssel, áttétel módosításokkal.
Itt már nagyon nem mindegy a mechanikád mozgó elemeinek tömege, tehetetlenségi nyomatéka.
De ha ez már adott, akkor nincs mit tenni, csak a motor illesztésével tudsz variálni.
Ezek adatok nélkül balgaság lenne ajánlatot tenni.
De ha már megvannak azok a motorok és a gép, akkor egy nap alatt szinte mindkettővel letesztelheted a gépet.
A kísérletek mérések még sosem ártottak egy projectnek sem.
Műszaki végzettségű ember lévén sejtened kellene hogy a motort a "nyomaték hajtja", és valami nem stimmel a 0,6 kontra 3,1 Nm kapcsán.
Induló adatoknak:
Az AC servod 0,6 Nm-t(de inkább 0,7 az szerintem) tud egyenletesen a teljes 0-3000-es fordulatszám tartományban.
A léptetőd, 3,1Nm-t tud álló helyzetben, majd a fordulatszámot emelve ez csökkenni fog.
A 600-as fordulatszámot elérve úgy 1,5-2 Nm-el számolhatsz, felette már drasztikusan fog csökkenni, 1000-es fordulat fölé pedig egyáltalán nem ajánlott menni.
Persze sok függ a léptetőmotor meghajtótól is.
A megoldás a megfelelő illesztés lesz a motorok és mechanika közt, ami gyakorlatilag fogazott szíjhajtásos áttételben fog majd megvalósulni.
A fentiek alapján számolgathatsz már sebességeket akár fejben is a mechanikádra.
A neheze majd később jön, amikor a dinamikai képességeket kell kiszámolni.
De jobb híján ezt is ki lehet tökölni kísérletezgetéssel, áttétel módosításokkal.
Itt már nagyon nem mindegy a mechanikád mozgó elemeinek tömege, tehetetlenségi nyomatéka.
De ha ez már adott, akkor nincs mit tenni, csak a motor illesztésével tudsz variálni.
Cím: Re:Léptetőmotor
Írta: x4rhew5r3 Dátum 2013 június 07, 11:37
Írta: x4rhew5r3 Dátum 2013 június 07, 11:37
Megtoldanám Svejk érvelését azzal, hogy nem biztos, hogy a sebesség a legfontosabb szempont. Hiába tud a gép 10m/perccel száguldani, ha azt a sebességet hosszú másodpercek alatt éri el. Van amikor (szinte mindig) a gyorsulás az igazi szűk keresztmetszet. Ha sok apró szakaszok vannak irányváltásokkal, akkor könnyen lehet, hogy az 1500 mm/perc effektíve lecsökken pár százra, mert állandó lassulások és gyorsulások vannak a mozgásban.
Ha ezt is figyelembe vesszük, akkor nem nehéz a döntés:) A léptecsnek van egy start frekvenciája, ami már önmagában kizárja a nagy gyorsulásokat. Ez még terhelve a mechanika tehetetlenségével csak ront a helyzeten.
Ezzel szemben a szervónál a névleges 0.7Nm nyomaték rövid időre felszökhet 4-5-szörösére, ami a gyorsításoknál nem mindegy.
De mindez akkor lehet érdekes, ha a mechanika is bírja a nagyobb gyorsulásokat. Ha nem kellően masszív és merev a gép, akkor nyugodtan lehet léptecsekkel hajtani a tengelyeket.
Ha ezt is figyelembe vesszük, akkor nem nehéz a döntés:) A léptecsnek van egy start frekvenciája, ami már önmagában kizárja a nagy gyorsulásokat. Ez még terhelve a mechanika tehetetlenségével csak ront a helyzeten.
Ezzel szemben a szervónál a névleges 0.7Nm nyomaték rövid időre felszökhet 4-5-szörösére, ami a gyorsításoknál nem mindegy.
De mindez akkor lehet érdekes, ha a mechanika is bírja a nagyobb gyorsulásokat. Ha nem kellően masszív és merev a gép, akkor nyugodtan lehet léptecsekkel hajtani a tengelyeket.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2013 június 08, 08:38
Írta: Szalai György Dátum 2013 június 08, 08:38
Hadd röfögjek egyet.
A famegmunkálás is elég sokféle lehet. Ha bonyolult felületű 3D relief marása a cél, ahol az alakhűséggel szemben nincs is szigorú követelmény, akkor a Z-nek kapkodnia kell magát, még gyenge vázon is. A főorsó fordulatszáma után a Z dinamikája lesz a legfontosabb. Szerintem ott egy léptető nagyon lelassítja a munkát.
A motor paraméterei önmagukban csak határadatok. (Hobbyban még az se, mert alaposan túl is léphetők időnként.) A motor tulajdonságain kívül a motorvezérlő elektronika és a mechanikai környezet hatása fogja eldönteni, hogy milyen valóságos értékekkel üzemel majd a motor.
Lehetnek csodák meg kivételek, de általában az ideális motor tulajdonságait a fejlettebb (összetettebb, bonyolultabb) rendszerek közelítik jobban. Az nagyon nem egy mezei, sima léptető motor egy egyszerű meghajtóval.
Ha nem élsz örökké, akkor a léptetőt és egyszerű meghajtót felejteném, akkor is, ha megköveznek érte. Pláne, ha rendelkezésre is áll az AC servo.
Z-re meg mindenképpen a leg dinamikusabbat tenném.
A famegmunkálás is elég sokféle lehet. Ha bonyolult felületű 3D relief marása a cél, ahol az alakhűséggel szemben nincs is szigorú követelmény, akkor a Z-nek kapkodnia kell magát, még gyenge vázon is. A főorsó fordulatszáma után a Z dinamikája lesz a legfontosabb. Szerintem ott egy léptető nagyon lelassítja a munkát.
A motor paraméterei önmagukban csak határadatok. (Hobbyban még az se, mert alaposan túl is léphetők időnként.) A motor tulajdonságain kívül a motorvezérlő elektronika és a mechanikai környezet hatása fogja eldönteni, hogy milyen valóságos értékekkel üzemel majd a motor.
Lehetnek csodák meg kivételek, de általában az ideális motor tulajdonságait a fejlettebb (összetettebb, bonyolultabb) rendszerek közelítik jobban. Az nagyon nem egy mezei, sima léptető motor egy egyszerű meghajtóval.
Ha nem élsz örökké, akkor a léptetőt és egyszerű meghajtót felejteném, akkor is, ha megköveznek érte. Pláne, ha rendelkezésre is áll az AC servo.
Z-re meg mindenképpen a leg dinamikusabbat tenném.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2013 június 08, 09:17
Írta: svejk Dátum 2013 június 08, 09:17
Majd tartom a fedélt a fejed fölött a kőzápor ellen. :)
De meg kellene tudni mekkora is az a gép, nem biztos hogy elég a 200W AC szervoban.
De meg kellene tudni mekkora is az a gép, nem biztos hogy elég a 200W AC szervoban.
Cím: Re:Léptetőmotor
Írta: cxmcdtrx Dátum 2013 június 08, 12:35
Írta: cxmcdtrx Dátum 2013 június 08, 12:35
A gép még a tervezési fázisban van, így minden alakítható a rendelkezésre álló dolgokhoz, vagy amihez idő közben hozzájutok.
3+1 tengelyesnek indul (X,Y,Z + forgató)
A Z-t egy 15 mm átmérőjű, 5 mm emelkedésű Star golyós orsó viszi majd, a hasznos munkaútja 250 mm lesz, 15-ös vagy 20-as Rexroth lineáris vezetőkön.
(Az orsó + anya + hajtás oldali csapágyház, lineáris sínek, kocsik már megvannak)
Tekintve, hogy az AC elég nagy sebességre képes, viszonylag stabil nyomatékkal, a 200W-os AC-t szánom ide, esetleg szíj áttételen keresztül meghajtva
a golyós orsót. Nem tudom, direkt hajtásban elég lenne-é. A főorsó valószínűleg egy 1500W-os, "tradícionális kínai" nagy fordulatú ER16-os (esetleg ER11) lesz.
Az X sínek 20-as HIWIN-ek lesznek, 1600 mm a sín hossza, a hasznos munkaút 1200 mm-re van tervezve, az Y szintén 20-as lineáris sín,
tervezett munkaútja 800 mm körül. 90%, hogy mozgó hidas kialakítású lesz.
Az X,Y mozgatását minden bizonnyal egy-egy 750W-os Yaskawa AC végzi majd.
A gép alapját izmosabb zártszelvényből tervezem (betonnal kiöntve), a híd anyaga egyelőre bizonytalan. Acél U gerenda, vastagfalú zártszelvény, bosch
aluprofil, ami szóbajön.
3+1 tengelyesnek indul (X,Y,Z + forgató)
A Z-t egy 15 mm átmérőjű, 5 mm emelkedésű Star golyós orsó viszi majd, a hasznos munkaútja 250 mm lesz, 15-ös vagy 20-as Rexroth lineáris vezetőkön.
(Az orsó + anya + hajtás oldali csapágyház, lineáris sínek, kocsik már megvannak)
Tekintve, hogy az AC elég nagy sebességre képes, viszonylag stabil nyomatékkal, a 200W-os AC-t szánom ide, esetleg szíj áttételen keresztül meghajtva
a golyós orsót. Nem tudom, direkt hajtásban elég lenne-é. A főorsó valószínűleg egy 1500W-os, "tradícionális kínai" nagy fordulatú ER16-os (esetleg ER11) lesz.
Az X sínek 20-as HIWIN-ek lesznek, 1600 mm a sín hossza, a hasznos munkaút 1200 mm-re van tervezve, az Y szintén 20-as lineáris sín,
tervezett munkaútja 800 mm körül. 90%, hogy mozgó hidas kialakítású lesz.
Az X,Y mozgatását minden bizonnyal egy-egy 750W-os Yaskawa AC végzi majd.
A gép alapját izmosabb zártszelvényből tervezem (betonnal kiöntve), a híd anyaga egyelőre bizonytalan. Acél U gerenda, vastagfalú zártszelvény, bosch
aluprofil, ami szóbajön.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2013 június 08, 12:53
Írta: svejk Dátum 2013 június 08, 12:53
Ahhoz a Z-hez és 200W-os AC-val majdnem jó is az 1:1 de a későbbi változtatások lehetősége miatt tervezd be az áttételt, és induláskor használj 1:1,5 lassítást.
Kb. ezt dobja ki a gép.
Az X, Y-hoz sok az 750W, ha okosan választod meg az orsókat akkor fele, negyede is elég lenne.
pl. átm 20x10-es orsóval 400W 1:2,5-tel vígan repülne a szerkezet.
Kb. ezt dobja ki a gép.
Az X, Y-hoz sok az 750W, ha okosan választod meg az orsókat akkor fele, negyede is elég lenne.
pl. átm 20x10-es orsóval 400W 1:2,5-tel vígan repülne a szerkezet.
Cím: Re:Léptetőmotor
Írta: cxmcdtrx Dátum 2013 június 08, 13:29
Írta: cxmcdtrx Dátum 2013 június 08, 13:29
Köszi a tanácsot. Mivel számoltad ezt?
Azért terveztem 750W-ot, mert ez van :-)
Induljunk ki ebből, mi lenne ehhez az optimális mechanika? Gyári, Sigma 2 vezérlővel lenne hajtva
A motor adatai:

Azért terveztem 750W-ot, mert ez van :-)
Induljunk ki ebből, mi lenne ehhez az optimális mechanika? Gyári, Sigma 2 vezérlővel lenne hajtva
A motor adatai:
Cím: Re:Léptetőmotor
Írta: cxmcdtrx Dátum 2013 június 08, 13:31
Írta: cxmcdtrx Dátum 2013 június 08, 13:31
Az X-nél esélyes a 2200 mm hosszúságú lineáris sín is, így nagyjából 1800 mm lenne a hasznos út. A kérdés az, hogy milyen orsót tudok majd beszerezni, illetve kell-e ekkora...
Cím: Re:Léptetőmotor
Írta: etc77f5nr Dátum 2013 június 08, 15:06
Írta: etc77f5nr Dátum 2013 június 08, 15:06
Akkora távon lehet érdemesebb lenne inkább a szíj vagy fogaskerékhajtás. Olyan hosszú orsónak nagy a tehetetlensége szerintem főleg, ha minél nagyobb az átmérő. De nem akarok beleszólni a mesterek megmondják a tutit. :)
Cím: Re:Léptetőmotor
Írta: cxmcdtrx Dátum 2013 június 08, 15:09
Írta: cxmcdtrx Dátum 2013 június 08, 15:09
Abban az esetben már az orsó fixen állna, és az anyát hajtaná a motor.Úgy egészen más gyorsulás érhető el :-)
Cím: Re:Léptetőmotor
Írta: etc77f5nr Dátum 2013 június 08, 17:28
Írta: etc77f5nr Dátum 2013 június 08, 17:28
Így látatlanban elég nehéz elképzelni ezt :) A forgó anya vontatja az egész hidat :) De nem megoldhatatlan gondolom.
Cím: Re:Léptetőmotor
Írta: cxmcdtrx Dátum 2013 június 08, 20:17
Írta: cxmcdtrx Dátum 2013 június 08, 20:17
Elég sok, kimondottan nagy gépen láttam ezt a megoldást, szerintem is jó
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2013 június 08, 22:30
Írta: besirkyjh Dátum 2013 június 08, 22:30
Szia
Igen használják sok gépen , olyan helyeken ahhol az orso sulya tulnagy és nagy a fordulata is .
Ezzel a megoldással viszonylag hosszu orsokat lehet használni csak a "logásra " figyelni kel .
Igen használják sok gépen , olyan helyeken ahhol az orso sulya tulnagy és nagy a fordulata is .
Ezzel a megoldással viszonylag hosszu orsokat lehet használni csak a "logásra " figyelni kel .
Cím: Re:Léptetőmotor
Írta: cxmcdtrx Dátum 2013 június 09, 21:46
Írta: cxmcdtrx Dátum 2013 június 09, 21:46
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2013 június 09, 22:04
Írta: besirkyjh Dátum 2013 június 09, 22:04
Szia
Nem kel ahhoz ekkora gép .
Egy X tengelyre füzzél fel 2db Z asztalt és hajtsd meg , de ugy hogy független is tudjanak mozogni egymástol . Fogasléc vagy golyosorso hajtott anyával ! Cr onsrud pl bár ezek is elég nagyok .
Nem kel ahhoz ekkora gép .
Egy X tengelyre füzzél fel 2db Z asztalt és hajtsd meg , de ugy hogy független is tudjanak mozogni egymástol . Fogasléc vagy golyosorso hajtott anyával ! Cr onsrud pl bár ezek is elég nagyok .
Cím: Re:Léptetőmotor
Írta: Lpeti11 Dátum 2013 július 07, 13:27
Írta: Lpeti11 Dátum 2013 július 07, 13:27
üdvözletem.
A problémám a következő:
Lenne egy 10 vezetékes (5 tekercses) léptetőmotor. Ezt szeretném valahogyan átalakítani, hogy 4 vezetékes ként működjön. Esetleg elektronikával is lehetséges lenne.
mindenféle megoldás érdekel... [#nemtudom]
A problémám a következő:
Lenne egy 10 vezetékes (5 tekercses) léptetőmotor. Ezt szeretném valahogyan átalakítani, hogy 4 vezetékes ként működjön. Esetleg elektronikával is lehetséges lenne.
mindenféle megoldás érdekel... [#nemtudom]
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2013 július 07, 13:31
Írta: svejk Dátum 2013 július 07, 13:31
A tulajdonodban egy 5 fázisú, valószínűleg Vexta vagy Berger-Lahr léptetőmotor van.
Ehhez teljesen más vezérlő kell mint a kétfázisúakhoz.
Beszerzése nem lehetetlen, néha itt az Adok-veszekben is fel-felbukkan belőle.
Ehhez teljesen más vezérlő kell mint a kétfázisúakhoz.
Beszerzése nem lehetetlen, néha itt az Adok-veszekben is fel-felbukkan belőle.
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2013 július 07, 13:45
Írta: jani300 Dátum 2013 július 07, 13:45
Berger-Lahr 2nm 325 V 1,75A- es 3 fázisú léptetőm nekem is van (ez volt az első).
A kevés információ amit itt összeszedtem a témában azt sugallja hogy nem igazán lesz ehhez vezérlőm :(
A kevés információ amit itt összeszedtem a témában azt sugallja hogy nem igazán lesz ehhez vezérlőm :(
Cím: Re:Léptetőmotor
Írta: Lpeti11 Dátum 2013 július 07, 20:42
Írta: Lpeti11 Dátum 2013 július 07, 20:42
Köszönöm....
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2013 július 07, 21:35
Írta: svejk Dátum 2013 július 07, 21:35
Én még csak a szakirodalomban találkoztam 3 fázisú léptetővel.
Cím: Re:Léptetőmotor
Írta: ra8nsmk6w Dátum 2013 július 07, 21:59
Írta: ra8nsmk6w Dátum 2013 július 07, 21:59
Nekem van egy darab. Ha akarsz vele ismerkedni, a tied. Amúgy meg útban van. Egyszer találkoztam egy hozzá való vezérlővel embertelen áron
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 július 08, 08:02
Írta: 000000000 Dátum 2013 július 08, 08:02
3MSDD-60-8.3 /3 fázisú/ léptető meghajtó fórumos ára bruttó 24000,-Ft.
Cím: Re:Léptetőmotor
Írta: ggdr57dg Dátum 2013 július 08, 08:48
Írta: ggdr57dg Dátum 2013 július 08, 08:48
Csak bele kérdeznék a 3 fázisú dologba:
Van egy ismerősöm, akinek egy VRDM 397/50 LWB motorja van, de ő sem ért hozzá (én sem)
Viszont meg kellene mozdítani, esetleg ahhoz is jó lenne egy ilyen vezérlő?
Talán ebből a pdf-ből ki lehet hámozni adatokat.
Fotóm nincs az adattábláról, de ezek vannak rajta:
Berger Lahr
Germany 9545 1020
VRDM 397/50 LWB
52625 0350 00
In=1.75 A
Mn=2.0Nm P=50
Köszönöm.
Van egy ismerősöm, akinek egy VRDM 397/50 LWB motorja van, de ő sem ért hozzá (én sem)
Viszont meg kellene mozdítani, esetleg ahhoz is jó lenne egy ilyen vezérlő?
Talán ebből a pdf-ből ki lehet hámozni adatokat.
Fotóm nincs az adattábláról, de ezek vannak rajta:
Berger Lahr
Germany 9545 1020
VRDM 397/50 LWB
52625 0350 00
In=1.75 A
Mn=2.0Nm P=50
Köszönöm.
Cím: Re:Léptetőmotor
Írta: ggdr57dg Dátum 2013 július 08, 08:54
Írta: ggdr57dg Dátum 2013 július 08, 08:54
Ebben a pdf-ben biztosan vannak adatok a motorról. Most olvasom jobban, lehet ez pont olyan, mint jani300 motorja? :-)
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2013 július 08, 13:29
Írta: jani300 Dátum 2013 július 08, 13:29
Igen ,az én motorom is ilyen .
Cím: Re:Léptetőmotor
Írta: fa_kukac Dátum 2013 július 08, 13:47
Írta: fa_kukac Dátum 2013 július 08, 13:47
A Powercontrol Tökölön szinte csak ezeket használja, szép csendes, erős, és pontos! A klavio-tól veszik.
Cím: Re:Léptetőmotor
Írta: fa_kukac Dátum 2013 július 08, 13:53
Írta: fa_kukac Dátum 2013 július 08, 13:53
Üdv György, írtam mailt.
Cím: Re:Léptetőmotor
Írta: 80n6rakth Dátum 2013 július 10, 07:50
Írta: 80n6rakth Dátum 2013 július 10, 07:50
ha egy unipoláris motort 1 tekercsesbe kötök akkor ahogy néztem nagyobb fordulatszámig tartja meg a nyomatékát. Van ennek valami hátránya a sorba kötéshez képest?
Cím: Re:Léptetőmotor
Írta: etc77f5nr Dátum 2013 július 10, 19:20
Írta: etc77f5nr Dátum 2013 július 10, 19:20
https://sites.google.com/a/minibee.hu/minibee-hu/leptetomotorok-bekoetese
Hátha segít :)
Hátha segít :)
Cím: Re:Léptetőmotor
Írta: 80n6rakth Dátum 2013 július 10, 21:41
Írta: 80n6rakth Dátum 2013 július 10, 21:41
Megtalaltad minden tudasom forrasat, de azert koszi :D. Esetleg valaki tud ajanlani valami jo kis konyvet a temaval kapcsolatban amiben nem csak az altalanos dolgokat mondjak el hanem egy kicsit jobbakat is? Szerintem az lehet esetleg a hatranya, hogy az az 1 tekercs jobban melegedik, viszont amit nem kotunk be az elvezeti a hot... Sorba kotesnel ha raadom az 1 tekercses aramat akkor mennyire veszes a melegedes? Talpara szerelt ventillatorral vissza lehet huteni? ( ha esetleg 1/8-ad lepesnel mar gyenge lenne)
Cím: Re:Léptetőmotor
Írta: etc77f5nr Dátum 2013 július 10, 21:47
Írta: etc77f5nr Dátum 2013 július 10, 21:47
Jó az egytekercses bekötés, ha annyi áramot adsz neki amennyi kell, akkor nem melegszik. Én is így használtam, ha felemeltem az áramot 25% 50%-ra (3A a max) akkor sem melegedett az 1A-s motor. De mint tudjuk nem illik túlhajtani, mert a meleg kinyírja a motort :) De minimum nyomatékvesztés.. Nem kevés. De a tapasztaltabbak megmondják a tuti, ha idetalálnak :)
Cím: Re:Léptetőmotor
Írta: 80n6rakth Dátum 2013 július 10, 21:56
Írta: 80n6rakth Dátum 2013 július 10, 21:56
Tenyleg az is jo lenne ha valaki tapasztalt megmondana, hogy mennyit lehet rajta emelni buntetlenul. 2A-es lenne a motor 1 tekercsesen alapbol. Szerintem eleg kell hogy legyen de ha nem lesz eleg pontos es csokkentem a lepeseket akkor lehet nem artana meg egy kis kakao.
Cím: Re:Léptetőmotor
Írta: 5z7aew5x Dátum 2013 július 11, 11:09
Írta: 5z7aew5x Dátum 2013 július 11, 11:09
Mostanában sikerült hozzájutnom, néhány unipoláris motorhoz, egy nagy nyomtató "szorter" egységéből. Nos az unipoláris megoldás nekem sem tetszik, ezért én óvatosan szétszedtem a motort, és átkötöttem bipolárisra. Ez pont úgy néz ki mint a Yankoo által hivatkozott oldal utolsó rajza. Még nem teszteltem, de a vezérlőmön jól beállítható az áram. A párhuzamos kötés miatt az áthajtható áram megduplázódhat. Ez a kötési mód a legnagyobb nyomatékot és magasabb fordulatot tesz lehetővé.[#wave]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 július 11, 11:20
Írta: 000000000 Dátum 2013 július 11, 11:20
Igen, ott a pont !
A legjobb kivezetni minden tekercsvéget és így lesz 8 szál vezeték amit tetszés szerint lehet kötni unipoláris, bipolárisan, sorosan, párhuzamosan.
Mondjuk az használható méretű motoroknál ez alap opció.
Cím: Re:Léptetőmotor
Írta: 5z7aew5x Dátum 2013 július 11, 11:34
Írta: 5z7aew5x Dátum 2013 július 11, 11:34
Így van! A NEMA23-as nagy motorjaimnál alapból ki van vezetve minden tekercs vég, így szabadon játszadozhattam vele.[#integet2]
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2013 július 12, 21:18
Írta: Szalai György Dátum 2013 július 12, 21:18
Sajnos a jobb léptető motormeghajtók működési részletei még ipari és üzleti titkok, amikre vigyáz a gyártó. Az irodalma csak a szerződött szervizek számára hozzáférhető.
Annyit tudni lehet azért, hogy az állórész tekercsáramait a forgórész szöghelyzetétől függően kell szabályoznia a motorvezérlő elektronikának, egy a tengelyre szerelt speciális szögadó jele alapján. Így lehet az áramból, jó hatásfokkal, hő helyett inkább több nyomaték. Ha szükséges még több nyomaték, akkor keresztülhajtható a motoron a névleges áram többszöröse is, de csak egy rövid ideig mer a keletkezett hőmennyiség az áram négyzetével és az idővel arányos. Utána pihentető időre van szükség, ahogy a motor hő profilja megkívánja, az szerint melegszik és adja át a hőt a környezetének.
A vas mágneses telítődéséig bármekkora árammal hajthatod a motort, bármekkora ideig, ha a keletkezett hőt el tudod vezetni és nem melegszik túl. (Pl. folyadékhűtés) De az esztelen áram pocsékolásnál fontosabb a jó hatásfokú áram/nyomaték átalakítás, azt pedig csak megfelelően bonyolult motormeghajtó elektronikával érheted el.
Ez a titok, és erre a „mezei” léptetőmotor vezérlők nem képesek. Nem veszik figyelembe a forgórész szöghelyzetét, így az állórész tekercsein akkor is feleslegesen nagy áram folyik, mikor arra semmi szükség nincsen. Az pedig mind felesleges hővé alakul.
http://www.jvl.dk/Default.asp?Action=Details&Item=756
Annyit tudni lehet azért, hogy az állórész tekercsáramait a forgórész szöghelyzetétől függően kell szabályoznia a motorvezérlő elektronikának, egy a tengelyre szerelt speciális szögadó jele alapján. Így lehet az áramból, jó hatásfokkal, hő helyett inkább több nyomaték. Ha szükséges még több nyomaték, akkor keresztülhajtható a motoron a névleges áram többszöröse is, de csak egy rövid ideig mer a keletkezett hőmennyiség az áram négyzetével és az idővel arányos. Utána pihentető időre van szükség, ahogy a motor hő profilja megkívánja, az szerint melegszik és adja át a hőt a környezetének.
A vas mágneses telítődéséig bármekkora árammal hajthatod a motort, bármekkora ideig, ha a keletkezett hőt el tudod vezetni és nem melegszik túl. (Pl. folyadékhűtés) De az esztelen áram pocsékolásnál fontosabb a jó hatásfokú áram/nyomaték átalakítás, azt pedig csak megfelelően bonyolult motormeghajtó elektronikával érheted el.
Ez a titok, és erre a „mezei” léptetőmotor vezérlők nem képesek. Nem veszik figyelembe a forgórész szöghelyzetét, így az állórész tekercsein akkor is feleslegesen nagy áram folyik, mikor arra semmi szükség nincsen. Az pedig mind felesleges hővé alakul.
http://www.jvl.dk/Default.asp?Action=Details&Item=756
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2013 július 13, 18:12
Írta: ANTAL GÁBOR Dátum 2013 július 13, 18:12
Asztalon játszottam egy MSD50-4.2 es vezérlővel és egy Sonceboz ( piros ) léptetővel. A motor 4.7 A /fázis áramú . Féllépéses üzemben 4.2 A et jumperoltam ( RMS: 3 A ) A pihentetőáram : 50%
A táp 30 V DC labortáp ( Imax= 3 A ) A meghajtás frekije 2 KHz ( ez 300 1/min nek felel meg ) 10 perces állandó üzem után már nem szívesen fogtam meg a motort ( sacc 50-60 Celsius fok ) . Mit csináltam rosszul ? A kísérlet után hidegen megmértem a motor ellenállását és induktivitását, majd összehasonlítottam még 2 db motorral . Gyakorlatilag mind a 3 egyforma ( 0.37 ohm 600uH ) Ebből azt a következtetést vontam le hogy a motor nem menetzárlatos.
A táp 30 V DC labortáp ( Imax= 3 A ) A meghajtás frekije 2 KHz ( ez 300 1/min nek felel meg ) 10 perces állandó üzem után már nem szívesen fogtam meg a motort ( sacc 50-60 Celsius fok ) . Mit csináltam rosszul ? A kísérlet után hidegen megmértem a motor ellenállását és induktivitását, majd összehasonlítottam még 2 db motorral . Gyakorlatilag mind a 3 egyforma ( 0.37 ohm 600uH ) Ebből azt a következtetést vontam le hogy a motor nem menetzárlatos.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 július 13, 18:23
Írta: 000000000 Dátum 2013 július 13, 18:23
Szerintem semmit nem csinálsz rosszul, csak ezek ennyit tudnak.
Folyamatosan pörgetve nekem is forróak lettek a motorok annak ellenére hogy minden a gyári adatok szerint volt beállítva.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2013 július 13, 18:44
Írta: ANTAL GÁBOR Dátum 2013 július 13, 18:44
Kösz de bennem maradt a kisördög. Ha gyártok mondjuk egy talajhorgonyt és azt mondom hogy a névleges terhelése 5 tonna akkor az annyi. Nincs mellébeszélés . Újabban mindent kétkedéssel fogadok mert a gyártók egyre kedvezőbb értékeket tüntetek fel hogy versenyben maradjanak ( Tipikusan az olaszok ) De már a svájciak is ? ( vagy elhallgatják hogy Bi = 30 % ????? ) Tudom hogy a drótok hőosztálya már régen 110C fok fölött van és a felületi hőmérséklet növelésével nő a leadott hő mennyisége de nekem már égett le Sanyo Denki motorom . Szeretek óvatos lenni
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2013 július 19, 22:56
Írta: Vetesi75 Dátum 2013 július 19, 22:56
Üdv mindenkinek!
Valamit nem értek: Az alany TB6560 P-type vezérlő.
Miért van az, hogy azonos motorfordulatnál az 1/2 és 1/8-ad lépés között nem érzékelek a motor járásának finomságában különbséget?
2 vezérlő, 2 motor, felcserélve is, többféle beállítással - nem tűnik vezérlő vagy motorfüggőnek.
Mintha nem is a kimeneti áramokkal variálna, hanem a bemeneti step frekvenciát osztaná le.
A másik, ez nem is igazán nagy gond: Mikor a vezérlőket vettem nem kértem hozzá leírást, mivel úgy is sok helyen fellelhető a neten... Na most vagy az irományom rossz, vagy ez az IC nem az az IC, vagy elfuserált a dip-kapcsoló, mert hogy ez 2x off állásban küldi a motort a legnagyobb árammal az tuti! (és az 1/8-ad és 1/16-od lépés kapcsolója körül is van valami gebasz...)
Valamit nem értek: Az alany TB6560 P-type vezérlő.
Miért van az, hogy azonos motorfordulatnál az 1/2 és 1/8-ad lépés között nem érzékelek a motor járásának finomságában különbséget?
2 vezérlő, 2 motor, felcserélve is, többféle beállítással - nem tűnik vezérlő vagy motorfüggőnek.
Mintha nem is a kimeneti áramokkal variálna, hanem a bemeneti step frekvenciát osztaná le.
A másik, ez nem is igazán nagy gond: Mikor a vezérlőket vettem nem kértem hozzá leírást, mivel úgy is sok helyen fellelhető a neten... Na most vagy az irományom rossz, vagy ez az IC nem az az IC, vagy elfuserált a dip-kapcsoló, mert hogy ez 2x off állásban küldi a motort a legnagyobb árammal az tuti! (és az 1/8-ad és 1/16-od lépés kapcsolója körül is van valami gebasz...)
Cím: Re:Léptetőmotor
Írta: keri Dátum 2013 július 20, 23:53
Írta: keri Dátum 2013 július 20, 23:53
Gondolom mert még 1/8 is bőven tud rezonálni és te azt érzékeled. Meg ha ugyan akkora frekvenciájú step jelet küldesz be, akkor csak a tengely sebessége csökken, a rezgés frekvenciája nem. Viszont a lépésszám valójában növekszik fordulatonként.
Remélem erre voltál kíváncsi mert nem teljesen világos a problémád :)
Remélem erre voltál kíváncsi mert nem teljesen világos a problémád :)
Cím: Re:Léptetőmotor
Írta: xfg6v697j Dátum 2013 július 21, 06:04
Írta: xfg6v697j Dátum 2013 július 21, 06:04
Lehet,hogy rossz a doksid,mert tényleg kétszer off állásban van teljes teljesítményen hajtva a motor.
P-type
P-type
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2013 július 21, 09:39
Írta: Vetesi75 Dátum 2013 július 21, 09:39
Szia! Igen rossz volt a doksim. Az általad linkelt szerűen működik. Ezt a részét sikerült kihámoznom a próbák alatt. :)
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2013 július 21, 10:21
Írta: Vetesi75 Dátum 2013 július 21, 10:21
Nem teljesen világos...
Mindkét esetben a motor fordulata kb. 0.3/min, step jel frekvenciája természetesen különböző.
1/2 lépésben kb. 2Hz-es a duruzsolás, 1/8-adnál ugyan úgy. Pedig négyszer nagyobb frekvenciára számítottam, vagy legalábbis arra, hogy némileg besimul a hangja... (Jelenleg egy akácfa hokedlihez van fogatva, hogy el ne repüljön, ez jól vissza kellene adjon minden rezdülést.)
Rezonancia sem kizárt, mert az "összeállítás" közlekedik hokedlistől. :) Rögtön kézi léptetéssel megnézem mit csinál, csak a pergésmentes step impulzus beadásra , meg a 12' elfordulás detektálására kicsit rá kell készülni...
Mindkét esetben a motor fordulata kb. 0.3/min, step jel frekvenciája természetesen különböző.
1/2 lépésben kb. 2Hz-es a duruzsolás, 1/8-adnál ugyan úgy. Pedig négyszer nagyobb frekvenciára számítottam, vagy legalábbis arra, hogy némileg besimul a hangja... (Jelenleg egy akácfa hokedlihez van fogatva, hogy el ne repüljön, ez jól vissza kellene adjon minden rezdülést.)
Rezonancia sem kizárt, mert az "összeállítás" közlekedik hokedlistől. :) Rögtön kézi léptetéssel megnézem mit csinál, csak a pergésmentes step impulzus beadásra , meg a 12' elfordulás detektálására kicsit rá kell készülni...
Cím: Re:Léptetőmotor
Írta: keri Dátum 2013 július 21, 10:57
Írta: keri Dátum 2013 július 21, 10:57
No ez érdekes akkor.
Rágumizol a tengelyre egy hurkapálcát.
Rágumizol a tengelyre egy hurkapálcát.
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2013 július 21, 13:11
Írta: Vetesi75 Dátum 2013 július 21, 13:11
Megkerültek a mikrolépések. [#rinya][#rinya] Nem erre számítottam. *.wav állomány hová tudnék feltölteni, ahonnan linkelni lehetne ide a fórumba?
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2013 július 21, 18:34
Írta: ANTAL GÁBOR Dátum 2013 július 21, 18:34
Egy kis kiegészítés ( de minthogy fejből írom azért kontrollálandó ) Úgy emlékszem a linkelt doksiban is van egy sajtóhiba mert emlékeim szerint az 1/8 1/16 mikrolépés föl van cserélve. Valamint a tartóáram szó helyett is szerencsésebb lenne valami más . ( Én a tartóáramot eddig úgy értelmeztem hogy az az áram ami rögzíti a motort a stepek közötti szünetekben ) Pl 3 amper a névleges áram és 50% a tartó akkor a szünetben 1.5 A folyik . A tapasztalatom szerint ha 50% ot programozok akkor a névleges áram lesz 1.5 A . Remélem Svejk olvassa mert tudom, hogy mérte a pikodrive ot és kijavít ha tévtanokat terjesztenék. ( Én ezt tapasztaltam ) amúgy több vezérlőt elépítettem amik sikeresen működnek
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2013 szeptember 07, 22:13
Írta: c2nsu773m Dátum 2013 szeptember 07, 22:13
Ha olyan nagy a gép hogy az Y tengelyt két golyósorsóval kell meghajtani és ezt léptető motorral szeretném mozgatni mi a jó megoldáa?
A: 1 vezérlő hajt két motort.
Vagy
B: 2 vezérlő két motor és egy közös stepdir jel.(ebben az esetben mi akadályozza meg az X tengely derékszögből való kimozdulását ha késne az egyik motor és hogyan történik a referencia pont felvétele? Két ref.kapcsoló van az Y tengely 2 golyósorsójánál?)
A: 1 vezérlő hajt két motort.
Vagy
B: 2 vezérlő két motor és egy közös stepdir jel.(ebben az esetben mi akadályozza meg az X tengely derékszögből való kimozdulását ha késne az egyik motor és hogyan történik a referencia pont felvétele? Két ref.kapcsoló van az Y tengely 2 golyósorsójánál?)
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2013 szeptember 08, 07:34
Írta: Szalai György Dátum 2013 szeptember 08, 07:34
Ha a léptetőmotorokat nem pozíció visszacsatolt szervo körben fogod működtetni, akkor az elektronikus párhuzamosítás nem ad biztonságot a pozíció differencia ellen. (Semelyik.)
Ha jót akarsz, akkor kénytelen vagy mechanikusan párhuzamosítani őket.
(Szíj, tengely, egyéb.)
Ha jót akarsz, akkor kénytelen vagy mechanikusan párhuzamosítani őket.
(Szíj, tengely, egyéb.)
Cím: Re:Léptetőmotor
Írta: designr Dátum 2013 szeptember 08, 20:54
Írta: designr Dátum 2013 szeptember 08, 20:54
Megoldás lehet még a két golyósorsó,egy nagy léptető is.Persze ha a motor elég a mechanikához..
Cím: Re:Léptetőmotor
Írta: designr Dátum 2013 szeptember 08, 20:56
Írta: designr Dátum 2013 szeptember 08, 20:56
Egyébként ez a probléma szervo motoroknál szerintem még kacifántosabb..hova lehet tenni az encodert..hány motor,,stb..
Cím: Re:Léptetőmotor
Írta: ggdr57dg Dátum 2013 szeptember 09, 14:03
Írta: ggdr57dg Dátum 2013 szeptember 09, 14:03
Cím: Re:Léptetőmotor
Írta: smalla Dátum 2013 szeptember 10, 10:44
Írta: smalla Dátum 2013 szeptember 10, 10:44
nekem is van egy ilyen vezérlőm, a DIP kapcsolók selejtek rajta leginkább, kb fél év után használhatatlanná váltak az állásban :S az összeset cseréltem, azóta jó...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 szeptember 11, 10:10
Írta: 000000000 Dátum 2013 szeptember 11, 10:10
Sziasztok, van valakinek eladó 1 db:
23LM-c352-G1V léptető motor
?
23LM-c352-G1V léptető motor
?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 szeptember 11, 18:43
Írta: 000000000 Dátum 2013 szeptember 11, 18:43
Szia,
Nekem van egy 23LM-C355 motorom. Szerintem a motor ugyanaz, 6 kivezetéses, 6mm atmérőjű lapolt tengely. Valamilyen fénymásolóbban volt.
A baj hogy én és a motor Finnországban van jelenleg. A posta szerintem nagyon drága lenne, viszont 26-án megyek haza, ha addig ráér akkor hazaviszem, remélem felengedik a repülőre...
Udv
Nekem van egy 23LM-C355 motorom. Szerintem a motor ugyanaz, 6 kivezetéses, 6mm atmérőjű lapolt tengely. Valamilyen fénymásolóbban volt.
A baj hogy én és a motor Finnországban van jelenleg. A posta szerintem nagyon drága lenne, viszont 26-án megyek haza, ha addig ráér akkor hazaviszem, remélem felengedik a repülőre...
Udv
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 szeptember 11, 19:48
Írta: 000000000 Dátum 2013 szeptember 11, 19:48
szia, köszönöm, addig ráér,
rám nem hivatkozz a gépen :)
(úgy tűnik, megfelel, a tengelyvég más)
rám nem hivatkozz a gépen :)
(úgy tűnik, megfelel, a tengelyvég más)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 szeptember 11, 20:11
Írta: 000000000 Dátum 2013 szeptember 11, 20:11
Rendben, azért majd emlékeztess valamikor előtte. Ha esetleg van valami léptetőd negyed colos tengellyel (6,35mm) azt elfogadom cserébe.
Üdv
Üdv
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 szeptember 11, 20:40
Írta: 000000000 Dátum 2013 szeptember 11, 20:40
szerintem 6,35mm mindkettő
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 szeptember 11, 22:12
Írta: 000000000 Dátum 2013 szeptember 11, 22:12
ami nálam van az tuti 6mm.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 szeptember 11, 22:50
Írta: 000000000 Dátum 2013 szeptember 11, 22:50
akkor a tipusszám végén az eltérés jelentheti...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 szeptember 25, 14:20
Írta: 000000000 Dátum 2013 szeptember 25, 14:20
Szia,
Írtam mailt...
Írtam mailt...
Cím: Re:Léptetőmotor
Írta: dravecz Dátum 2013 november 09, 20:46
Írta: dravecz Dátum 2013 november 09, 20:46
Üdv.
Segítség kéne. Van egy gépem ilyen léptetőmotor vezérlővel:
http://webaruhaz.klavio.hu/index.php?id=t2cnch01_aruhaz_kulcs&p=termeklap&tkod=19
Ez a számítógép:
http://www.pcarena.hu/arlista/lenovo-thinkcentre-m55p-8811-t-6
Xp vel. Sp3-al!!!!!
Abban kéne a segítség hogy durván szolnak a léptető motorok. Igaz nem mindig. Csak néha. Lépést is veszt ha durva hangja van.De van amikor simán megy. Miért lehet ez????????
A gép most került hozzám, és KEZDŐ vagyok.
Segítség kéne. Van egy gépem ilyen léptetőmotor vezérlővel:
http://webaruhaz.klavio.hu/index.php?id=t2cnch01_aruhaz_kulcs&p=termeklap&tkod=19
Ez a számítógép:
http://www.pcarena.hu/arlista/lenovo-thinkcentre-m55p-8811-t-6
Xp vel. Sp3-al!!!!!
Abban kéne a segítség hogy durván szolnak a léptető motorok. Igaz nem mindig. Csak néha. Lépést is veszt ha durva hangja van.De van amikor simán megy. Miért lehet ez????????
A gép most került hozzám, és KEZDŐ vagyok.
Cím: Re:Léptetőmotor
Írta: Révész Richárd Dátum 2013 november 09, 20:55
Írta: Révész Richárd Dátum 2013 november 09, 20:55
Mit jelent az, hogy durván szól.Sípol?
Szerintem túl nagy a sebesség és a gyorsítási adat.
De ez csak egy gondolat.
Szerintem túl nagy a sebesség és a gyorsítási adat.
De ez csak egy gondolat.
Cím: Re:Léptetőmotor
Írta: f35ezvjs Dátum 2013 november 09, 21:01
Írta: f35ezvjs Dátum 2013 november 09, 21:01
Szia!
Nézd meg a vezérlőkártyád lépés beállítását.
vedd fel 1000 lépésre majd az ampert vedd fel fulra.
A sípolás az első végett van
a lépéstévesztés a második végett van.
De a motor tuningot pedig a második tedd 2500 ra biztos így nem téveszt lépést.
Nézd meg a vezérlőkártyád lépés beállítását.
vedd fel 1000 lépésre majd az ampert vedd fel fulra.
A sípolás az első végett van
a lépéstévesztés a második végett van.
De a motor tuningot pedig a második tedd 2500 ra biztos így nem téveszt lépést.
Cím: Re:Léptetőmotor
Írta: dravecz Dátum 2013 november 12, 19:19
Írta: dravecz Dátum 2013 november 12, 19:19
Szia.
Még nem nyúltam bele az állításokba, de olyat veszek észre, hogy a motor vagy sípol majd megsüketelek, újraindítom a sz.gépet, akkor meg már morog. És van amikor meg elég elfogadható a hangja. Ez mi lehet?
Lehet a számítógép zavar be valamit? Elég "nagy" gépet szereztem hozzá:
Lenovo ThinkCentre M55p (8811)
Állóházas számítógép (8811)
Pentium D-945 3400 MHz processzor (LGA775, 4MB L2, 800MHz FSB)
1024 MB DDR2-ram (4 slot, dual-channel)
160 GB HDD
Hagyományos méretű DVD meghajtó
Intel Q965 (ICH8) Express chipset
Intel GMA 3000 - 256 MB alaplapi VGA vezérlő (ezt kiváltottuk egy Gigabyte GV-N84STC-512I) mert ha jól tudom nem szereti a msch3 az alaplapi kártyát.
ADI 1983 HD alaplapi hangvezérlő
Intel 82566DM Gigabit alaplapi hálózati vezérlő
1 x PCI Express x16 slot hagyományos méretű kártyához
2 x PCI bővítőhely
1 x PCI Express x1 slot
5 x SATA vezérlő
10 x USB 2.0
1 x soros (RS-232) port
1 x párhuzamos (LPT) port
2 x 5,25" beépítőhely
nem lehet hogy valamit nem szeret a vezérlés a számítógépen belül?
A vezérlésem az MSD-50-5.6 Bipoláris,mikrolépéses léptető motor vezérlő.
Még nem nyúltam bele az állításokba, de olyat veszek észre, hogy a motor vagy sípol majd megsüketelek, újraindítom a sz.gépet, akkor meg már morog. És van amikor meg elég elfogadható a hangja. Ez mi lehet?
Lehet a számítógép zavar be valamit? Elég "nagy" gépet szereztem hozzá:
Lenovo ThinkCentre M55p (8811)
Állóházas számítógép (8811)
Pentium D-945 3400 MHz processzor (LGA775, 4MB L2, 800MHz FSB)
1024 MB DDR2-ram (4 slot, dual-channel)
160 GB HDD
Hagyományos méretű DVD meghajtó
Intel Q965 (ICH8) Express chipset
Intel GMA 3000 - 256 MB alaplapi VGA vezérlő (ezt kiváltottuk egy Gigabyte GV-N84STC-512I) mert ha jól tudom nem szereti a msch3 az alaplapi kártyát.
ADI 1983 HD alaplapi hangvezérlő
Intel 82566DM Gigabit alaplapi hálózati vezérlő
1 x PCI Express x16 slot hagyományos méretű kártyához
2 x PCI bővítőhely
1 x PCI Express x1 slot
5 x SATA vezérlő
10 x USB 2.0
1 x soros (RS-232) port
1 x párhuzamos (LPT) port
2 x 5,25" beépítőhely
nem lehet hogy valamit nem szeret a vezérlés a számítógépen belül?
A vezérlésem az MSD-50-5.6 Bipoláris,mikrolépéses léptető motor vezérlő.
Cím: Re:Léptetőmotor
Írta: dravecz Dátum 2013 november 12, 22:19
Írta: dravecz Dátum 2013 november 12, 22:19
utolsó hozzáoszlásom óta próbáltam még valamit. Ráraktam egy másik számítógépet. Jóval primitívebbet. Valamivel jobb lett a léptetőmotor hangja. Talán halkabban "sípol".A lépéstévesztés ritkább jóval! Most még próbálkoztam azzal is, hogy a motor tuningban állogattam az üresjáratai sebességet. a Z és a X akár 3000 nél is szépen fut, de az Y temngelynél, ha 2000 fölé veszem "rezonál" az egész gép, nagyon fura hangja van. Miért van ez?????
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 13, 07:45
Írta: 000000000 Dátum 2013 november 13, 07:45
Nulladik kérdésem: össze tudsz rakni egy 20 Ft-os IC-ből (pl. 555) egy potméterrel állítható stepjel generátort? Ugyanis ezzel PC nélkül le tudnád tesztelni a hajtásaid "zaját", képességeit. Utána ha ez a teszt ok., akkor a vezérlő program és PC beállításainál lehet tovább lépni a hiba felderítésében.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 13, 07:59
Írta: 000000000 Dátum 2013 november 13, 07:59
A meghajtón elvégezted az automatikus tuningot?
Ez a DIP4 kapcsoló átbillentése bekapcsolt állapotban.
Ez a DIP4 kapcsoló átbillentése bekapcsolt állapotban.
Cím: Re:Léptetőmotor
Írta: Révész Richárd Dátum 2013 november 13, 12:27
Írta: Révész Richárd Dátum 2013 november 13, 12:27
Milyen felépítésű a mechanikád?
Trapézorsó, menetes szár, golyósorsó?
Nem szorulnak a tengelyek?
Milyen a megvezetés?
Dobhatnál fel egy képet.
Driver tesztet csináltál már a PC-n?
Trapézorsó, menetes szár, golyósorsó?
Nem szorulnak a tengelyek?
Milyen a megvezetés?
Dobhatnál fel egy képet.
Driver tesztet csináltál már a PC-n?
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2013 november 13, 21:25
Írta: c2nsu773m Dátum 2013 november 13, 21:25
Nagy örömmel szereztem kapcsoló üzemü tápot, szépen beállítottam a megfelelő voltot , majd a programban is a megfelelő értékeket.
Alacsony sebességeknél lerázott magáról mindent a gép, döcögött,a hajamat téptem.
Tekertettem egy megfelelő toroidot, kicseréltem , azóta olyan szépen muzsikál és gyönyörű simán megy még a leg lassabb sebességnél is!
Alacsony sebességeknél lerázott magáról mindent a gép, döcögött,a hajamat téptem.
Tekertettem egy megfelelő toroidot, kicseréltem , azóta olyan szépen muzsikál és gyönyörű simán megy még a leg lassabb sebességnél is!
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2013 november 13, 22:09
Írta: jani300 Dátum 2013 november 13, 22:09
Üdv Tibor !
A stepjel generátortról tennél fel egy rajzot ? A legegyszerűbb működőt .
Már talán elboldogulok vele . :(
A stepjel generátortról tennél fel egy rajzot ? A legegyszerűbb működőt .
Már talán elboldogulok vele . :(
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2013 november 13, 22:24
Írta: svejk Dátum 2013 november 13, 22:24
Talán az egyik legegyszerűbb:
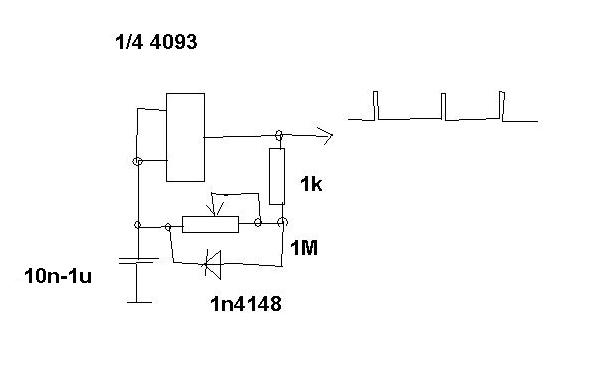
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2013 november 13, 22:27
Írta: svejk Dátum 2013 november 13, 22:27
De ha Mach3 kompatibilis kell akkor célszerú az astabil multivibrátorral egy monostabilt indítgatni, így állandó lesz a step jel szélessége, mely Mach3 esetén 2-25 us a motortuning beállításától függően.
Mindkét multivibrátor lehet 1-1 NE555.
Mindkét multivibrátor lehet 1-1 NE555.
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2013 november 13, 22:29
Írta: jani300 Dátum 2013 november 13, 22:29
Köszönöm !
Az ic tok bekötését sem tudom ,de arra már rákeresek .
Az ic tok bekötését sem tudom ,de arra már rákeresek .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 13, 22:32
Írta: 000000000 Dátum 2013 november 13, 22:32
Pl. ez a kapcsolás jó lesz Neked.
Az oldalon részletes RC kör méretezést is találsz, amivel a kívánt step frekit beállíthatod.
Az oldalon részletes RC kör méretezést is találsz, amivel a kívánt step frekit beállíthatod.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2013 november 13, 22:33
Írta: svejk Dátum 2013 november 13, 22:33
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2013 november 13, 22:35
Írta: jani300 Dátum 2013 november 13, 22:35
Hű ! A Mach 3 az még igen kínai . Az analóg áram köröket még úgy ahogy értem , de az ic -k nem annyira mennek ,de muszáj lesz ..
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2013 november 13, 22:36
Írta: jani300 Dátum 2013 november 13, 22:36
Köszönöm Urak !
Cím: Re:Léptetőmotor
Írta: dravecz Dátum 2013 november 15, 22:31
Írta: dravecz Dátum 2013 november 15, 22:31
Urak köszönöm a sok segítséget.
Sajnos nem vagyok műszaki ember, és nem igen értek az elektronika építéshez, tehát nem tudok építeni 20 ft-os dolgot a motor tesztelésére.
Csináltam a gépről 1-2 képet:
http://www.kepfeltoltes.hu/view/131115/1230520984002_www.kepfeltoltes.hu_.jpg
http://www.kepfeltoltes.hu/view/131115/1243627180001_www.kepfeltoltes.hu_.jpg
x-y tengely trapézmenetes, z tengely golyósorsos.
vezérlésről:
http://www.kepfeltoltes.hu/view/131115/299828526005_www.kepfeltoltes.hu_.jpg
http://www.kepfeltoltes.hu/view/131115/295628306004_www.kepfeltoltes.hu_.jpg
Nah és marás közbeni lépéstévesztésről:
http://www.kepfeltoltes.hu/view/131115/412275387003_www.kepfeltoltes.hu_.jpg
Itt elvileg mind körnek kéne lennie.
Video a jelenség lépéstévesztés hangjáról:
http://www.youtube.com/watch?v=zcgPKYIgWKE&feature=youtu.be
Nagyon kezdő vagyok a szakmában. Örülök a sok segítségnek, és kérem segítsetek mé van ez a lépéstévesztés.
Tibor, hol van a dip4 es kapcsoló? nagyon kezdő, vagyok , félek elszúrok valamit a vezérlésen, gépen.
Sajnos nem vagyok műszaki ember, és nem igen értek az elektronika építéshez, tehát nem tudok építeni 20 ft-os dolgot a motor tesztelésére.
Csináltam a gépről 1-2 képet:
http://www.kepfeltoltes.hu/view/131115/1230520984002_www.kepfeltoltes.hu_.jpg
http://www.kepfeltoltes.hu/view/131115/1243627180001_www.kepfeltoltes.hu_.jpg
x-y tengely trapézmenetes, z tengely golyósorsos.
vezérlésről:
http://www.kepfeltoltes.hu/view/131115/299828526005_www.kepfeltoltes.hu_.jpg
http://www.kepfeltoltes.hu/view/131115/295628306004_www.kepfeltoltes.hu_.jpg
Nah és marás közbeni lépéstévesztésről:
http://www.kepfeltoltes.hu/view/131115/412275387003_www.kepfeltoltes.hu_.jpg
Itt elvileg mind körnek kéne lennie.
Video a jelenség lépéstévesztés hangjáról:
http://www.youtube.com/watch?v=zcgPKYIgWKE&feature=youtu.be
Nagyon kezdő vagyok a szakmában. Örülök a sok segítségnek, és kérem segítsetek mé van ez a lépéstévesztés.
Tibor, hol van a dip4 es kapcsoló? nagyon kezdő, vagyok , félek elszúrok valamit a vezérlésen, gépen.
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2013 november 15, 22:50
Írta: c2nsu773m Dátum 2013 november 15, 22:50
Én egy kicsit kicsinylem ezeket a motorokat.
Cím: Re:Léptetőmotor
Írta: Révész Richárd Dátum 2013 november 15, 22:57
Írta: Révész Richárd Dátum 2013 november 15, 22:57
Merre laksz?Ha esetleg pest környéke akkor megnézném ezt a masinát.
Cím: Re:Léptetőmotor
Írta: dravecz Dátum 2013 november 15, 23:01
Írta: dravecz Dátum 2013 november 15, 23:01
Tamásiba. Tolna megye. Balaton alatt
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2013 november 15, 23:28
Írta: s7manbs8 Dátum 2013 november 15, 23:28
Ilyen step jel generátort lehetne csinálni egy olyat, hogy lenne rajta egy LPT port csatlakozó, meg egy kis rossz procit betenni és lehetne ezzel tesztelgetni, potival állítható step jel szélesség és freki .... Nem lenne nehéz megcsinálni, kell valakinek ilyen ? Ha kellene pár embernek érdemes lenne megrajzolni és csinálni belőle.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2013 november 15, 23:30
Írta: s7manbs8 Dátum 2013 november 15, 23:30
Ott a lépés vesztéskor nekem úgy tűnt, mintha nem is kapott volna utána jelet a videón, jó kis gépnek néz ki pedig.
Cím: Re:Léptetőmotor
Írta: dravecz Dátum 2013 november 15, 23:35
Írta: dravecz Dátum 2013 november 15, 23:35
Ha kézzel mozgatom, akkor tényleg nem megy tovább mikor téveszt. De ha "programban" megy akkor továbbmegy. Ebből mit lehet leszűrni?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 15, 23:53
Írta: 000000000 Dátum 2013 november 15, 23:53
Szerintem, egészen jól egybe van ez a gép. Abból ítélve, amit lehet látni, képeken, videón.
Valószínűleg, „csak” beállításilag kellene gatyába rázni, szoftverileg, és esetleg vezérlésileg is.
Első lépésben, vedd vissza a gyorsítást, lassítást.
Esetleg, megnézhetnéd a motorok vezetékeiből nincs e valamelyik meglazulva.
Ha, közelebb laknál, rendbe raknám.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2013 november 16, 00:08
Írta: s7manbs8 Dátum 2013 november 16, 00:08
Az mit jelent, hogy kézzel mozgatod ? Meg az is, hogy nem megy tovább ? Kicsit bővebben, nem érthető mire gondolsz.
Cím: Re:Léptetőmotor
Írta: dravecz Dátum 2013 november 16, 00:12
Írta: dravecz Dátum 2013 november 16, 00:12
A kézzel mozgatom, azt úgy értettem, hogy "nyomom" a klaviatúrán a "nyilat", és úgy mozgatom a tengelyeket. Az hogy nem megy tovább, az általában úgy alakul, hogy nyomom a felfele /y+ irányba/ nyilat, és mikor téveszt, még nem engedem el a nyilat, és nem nyomom újra addig nem megy tovább!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 16, 00:30
Írta: 000000000 Dátum 2013 november 16, 00:30
Óóó, bocs, hogy beleszóltam, Természetesen, nem muszáj nekünk beszélgetni.
Kiléptem a témából.
Cím: Re:Léptetőmotor
Írta: dravecz Dátum 2013 november 16, 00:37
Írta: dravecz Dátum 2013 november 16, 00:37
Bocsáss meg nekem Danibá. Gyarló ember lévén hirtelen az utolsó hozzászólást olvastam csak el. Köszönöm, hogy így ismeretlenül is segítesz nekem. A gyorsítást, lassítást mennyire kéne visszavenni? Ez okozná a tévesztést?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 16, 00:52
Írta: 000000000 Dátum 2013 november 16, 00:52
Na, jó. Akkor fussunk neki mégegyszer:))
Írok a levedre választ.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2013 november 16, 13:56
Írta: s7manbs8 Dátum 2013 november 16, 13:56
Az, normális, mert akkor míg nem engeded el a nyilat, addig adja ki a step jelet, de mivel megállt, az olyan gyors, hogy nem tud meg se moccanni.
Sebességet vedd le, gyorsulást vedd le kisebbre, hogy mennyire, annyira, hogy ne akadjon meg, de olyat is csinálhatsz, hogy ahol még majdnem nem akad meg, annak fele értékére leveszed, sebességnél ezt egész pici gyorsulással beállítva tudod megcsinálni, gyorsulást meg mikor már a sebesség max be van állítva, akkor szintén a sebesség fixen véve, gyorsulással játszol, hogy mennyi amit még épp bír és annak veszed le felére pl.
Sebességet vedd le, gyorsulást vedd le kisebbre, hogy mennyire, annyira, hogy ne akadjon meg, de olyat is csinálhatsz, hogy ahol még majdnem nem akad meg, annak fele értékére leveszed, sebességnél ezt egész pici gyorsulással beállítva tudod megcsinálni, gyorsulást meg mikor már a sebesség max be van állítva, akkor szintén a sebesség fixen véve, gyorsulással játszol, hogy mennyi amit még épp bír és annak veszed le felére pl.
Cím: Re:Léptetőmotor
Írta: etc77f5nr Dátum 2013 november 16, 14:05
Írta: etc77f5nr Dátum 2013 november 16, 14:05
A sebességet próbáld meg úgy állítani, hogy számolsz azzal, hogy a motorok 500 1/p fordulaton adják ki a max nyomatékot (ami valojában a max nyomaték 70%-a kb mert a tartóáram a max) Szóval, ha neked 3mm az emelkedésed akkor 1500mm/p a sebesség a gyorsulást pedig 200tól kezd. Nekem 2Nm névleges motorjaim vannak 3mm menetemelkedéssel, és a sebességem üresjárataban 2200mm/p a gyorsulás 600mm/sec2. Én is kikisérleteztem. Az x tengelyem tudna menni 5000mm/p el is de félnék, hogy munka közben téveszt.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2013 november 16, 15:00
Írta: besirkyjh Dátum 2013 november 16, 15:00
Szia
Mielött agyon tanácsolunk irj pár dolgot a gépedröl :) Nekem már igy is nagyon lassunak tünik ( a nagyságához képest ) .
Milyen a vezérlöd ? D-s vagy DD tipusu ( a Gyuri kérdezte a dü4-es kapcsolot , ebböl arra követketetek hogy DD-s , akkor azt a "hangolást " meg kel csinálni amit irt ) .
Használsz-e mikrosteppet ( a vezérlön ) .
Milyen nyomatéku a léptetöd ?
Milyen lineket használsz ?
Mekkora Kerner freki van állitva a PC-den ?
Mielött agyon tanácsolunk irj pár dolgot a gépedröl :) Nekem már igy is nagyon lassunak tünik ( a nagyságához képest ) .
Milyen a vezérlöd ? D-s vagy DD tipusu ( a Gyuri kérdezte a dü4-es kapcsolot , ebböl arra követketetek hogy DD-s , akkor azt a "hangolást " meg kel csinálni amit irt ) .
Használsz-e mikrosteppet ( a vezérlön ) .
Milyen nyomatéku a léptetöd ?
Milyen lineket használsz ?
Mekkora Kerner freki van állitva a PC-den ?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2013 november 16, 15:01
Írta: besirkyjh Dátum 2013 november 16, 15:01
Dp4-es kapcsolo
Bocsánat
Bocsánat
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 16, 17:15
Írta: 000000000 Dátum 2013 november 16, 17:15
Üdv uraim.
Remélem jó helyen járok.Van két léptető motorom ill. egy pár darab (lineáris mérő kocsija.)Ezt mondták,lehet hogy nem helyes a megfogalmazás.Itt szakértők vannak,szeretnék véleményt kérni.
A két motor típusa:23SH 086-028-8w-f8 3.1NM 1.8fok 2.1A/fázis 5.46v.Valaki fel tudna világosítani,hogy mit érnek ezek?
Remélem jó helyen járok.Van két léptető motorom ill. egy pár darab (lineáris mérő kocsija.)Ezt mondták,lehet hogy nem helyes a megfogalmazás.Itt szakértők vannak,szeretnék véleményt kérni.
A két motor típusa:23SH 086-028-8w-f8 3.1NM 1.8fok 2.1A/fázis 5.46v.Valaki fel tudna világosítani,hogy mit érnek ezek?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2013 november 16, 18:39
Írta: besirkyjh Dátum 2013 november 16, 18:39
Szia
Ha meg mondod , vagy meg mutatod , mi az a linerás mérö kocsi akkor többet fogunk tudni mondani :)
Egyébként a felhasználotol függ hogy mit ér Neki ez a léptetö ( ha eladásra szánod ) .
Ha meg mondod , vagy meg mutatod , mi az a linerás mérö kocsi akkor többet fogunk tudni mondani :)
Egyébként a felhasználotol függ hogy mit ér Neki ez a léptetö ( ha eladásra szánod ) .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 16, 20:09
Írta: 000000000 Dátum 2013 november 16, 20:09
Tartozás fejében kaptam.Máshogy nem tudtam "behajtani" az összeget.Igazából nekem nincs rá szükségem,így eladnám.Vadi újak.Mindjárt rakok képet.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 16, 20:18
Írta: 000000000 Dátum 2013 november 16, 20:18
Majdnem ugyanilyen,és van dupla ilyen hosszú is.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 16, 20:25
Írta: 000000000 Dátum 2013 november 16, 20:25
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 17, 01:48
Írta: 000000000 Dátum 2013 november 17, 01:48
Magánlevelezésben, megkaptam a „gép” adatait, képeit. Ezeknek utánajárva, számolgatva, és a tapasztalataim felhasználásával.
Megadtam, a körülményekhez képest, lehető legjobb választ, tanácsokat, beállításokat.
Remélhetőleg ennek felhasználásával, és eredményeként működőképessé válik a gép.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 17, 01:55
Írta: 000000000 Dátum 2013 november 17, 01:55
Kulcsár Zoltán!
Annyit mondhatok, Az összes hiba okozója, az átgondolatlan, inkorrekt megépítés.
A hozzá képest, aránytalanul nagy elvárás.
De, mint tudjuk, Trabanttal nem lehet Forma1 –et nyerni.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2013 november 17, 06:49
Írta: besirkyjh Dátum 2013 november 17, 06:49
Szia Danibá
Ugy van ahogy mondod de nekem a leirásbol nem volt egyértelmü ( és még most sem ) hogy Trabantrol van szo vagy sem .
Lehet tanulságos lenne mindenkinek ha kapnánk valami infot az elkövetett hibákrol és azok kiküszöböléséröl ?
elég ha csak a válasz gombot használod :)
Ugy van ahogy mondod de nekem a leirásbol nem volt egyértelmü ( és még most sem ) hogy Trabantrol van szo vagy sem .
Lehet tanulságos lenne mindenkinek ha kapnánk valami infot az elkövetett hibákrol és azok kiküszöböléséröl ?
elég ha csak a válasz gombot használod :)
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2013 november 17, 08:50
Írta: PSoft Dátum 2013 november 17, 08:50
Egy esetben lehet...
Ha az összes induló....Trabantos.:))
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 17, 18:32
Írta: 000000000 Dátum 2013 november 17, 18:32
Képet a saját gépről hogyan lehet feltölteni?
Cím: Re:Léptetőmotor
Írta: Révész Richárd Dátum 2013 november 17, 18:52
Írta: Révész Richárd Dátum 2013 november 17, 18:52
Felteszed valahová PL képfeltöltés és onnan linkeled.
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2013 november 17, 18:58
Írta: Rabb Ferenc Dátum 2013 november 17, 18:58
A képet lekicsinyíted max 800x600 pixel méretűre. Feltolod pl a www.kepfeltöltes.hu weboldalra. Majd innen belinkeled az ablak jobb alsó szélén lévő [kép] felugró ablakába.
Nem a közvetlen linket, mert abban szerepel egy felesleges "view" szó is. Behívod a képet, - egér jobb fül - tulajdonságok. Az itt megjelenő url-t másolod be.
Minden kép beszúrása előtt nyomj legalább két ENTERT-t. Így egymás alá kerülnek és nem egymás mellé szétnyomva a topikot.
Nem a közvetlen linket, mert abban szerepel egy felesleges "view" szó is. Behívod a képet, - egér jobb fül - tulajdonságok. Az itt megjelenő url-t másolod be.
Minden kép beszúrása előtt nyomj legalább két ENTERT-t. Így egymás alá kerülnek és nem egymás mellé szétnyomva a topikot.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 17, 19:06
Írta: 000000000 Dátum 2013 november 17, 19:06
Köszi erre nem jöttem volna rá.:)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 17, 19:10
Írta: 000000000 Dátum 2013 november 17, 19:10
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 17, 19:11
Írta: 000000000 Dátum 2013 november 17, 19:11
Uh ez nem lett túl kicsi...
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2013 november 17, 19:30
Írta: Rabb Ferenc Dátum 2013 november 17, 19:30
Bakker!!! Az első mondatom ... [#boxer][#boxer]
És ha nem lett túl kicsi, azt magyarul úgy mondják, hogy nagy lett [#duhos2]
És ha nem lett túl kicsi, azt magyarul úgy mondják, hogy nagy lett [#duhos2]
Cím: Re:Léptetőmotor
Írta: hostya Dátum 2013 november 17, 19:35
Írta: hostya Dátum 2013 november 17, 19:35
JÓ ez.. :((
Csak (© Rabb Ferenc #4098) első mondatát nem vetted figyelembe...
Itt rontja el a többség, hogy nem méretezi át a képet feltöltés előtt. :(
Csak (© Rabb Ferenc #4098) első mondatát nem vetted figyelembe...
Itt rontja el a többség, hogy nem méretezi át a képet feltöltés előtt. :(
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 17, 19:55
Írta: 000000000 Dátum 2013 november 17, 19:55
Bocsánat,pedig jól instruáltál.[#worship]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 17, 19:56
Írta: 000000000 Dátum 2013 november 17, 19:56
Ha tudnátok némi irányt adni hogy hol,és mennyiért lehetne ezektől megválni.12 és 16 mm-esek a "kocsik".
Cím: Re:Léptetőmotor
Írta: hostya Dátum 2013 november 17, 20:01
Írta: hostya Dátum 2013 november 17, 20:01
AZ " Adok-veszek-cserélek. CSAK ÁRMEGJELÖLÉSSEL!!" topikban próbálkozz..
Árajánlatot NE kérj, mert azzal rosszul jársz!
Árajánlatot NE kérj, mert azzal rosszul jársz!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 17, 20:09
Írta: 000000000 Dátum 2013 november 17, 20:09
hogyvan? hajónak indult, de nem komplett?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2013 november 17, 20:10
Írta: svejk Dátum 2013 november 17, 20:10
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 17, 20:46
Írta: 000000000 Dátum 2013 november 17, 20:46
Köszönöm.Nagyjából tisztában voltam vele,de így pontosabb.Valakit érdekel esetleg? Mielőtt máshol futnék egy pár kört.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 21, 15:38
Írta: 000000000 Dátum 2013 november 21, 15:38
AM882 léptetőmotor vezérlőt használ valaki?
Lenne pár kérdésem, nem világos.
Lenne pár kérdésem, nem világos.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2013 november 21, 16:36
Írta: istvan58 Dátum 2013 november 21, 16:36
Hali,
En fogok, de már elég sokat kisérleteztem vele és a gyartóval is konzultáltam egy két dologban.
En fogok, de már elég sokat kisérleteztem vele és a gyartóval is konzultáltam egy két dologban.
Cím: Re:Léptetőmotor
Írta: 9npx2xk89 Dátum 2013 november 21, 17:10
Írta: 9npx2xk89 Dátum 2013 november 21, 17:10
Hali!
Lehet a mach3-al hajtani a léptető motort, és közben egy encodertől venni a jeleket, és nem a lépéseket számlálni? Az talán pontosabb lenne, és elkerülhető a lépésvesztés.
Lehet a mach3-al hajtani a léptető motort, és közben egy encodertől venni a jeleket, és nem a lépéseket számlálni? Az talán pontosabb lenne, és elkerülhető a lépésvesztés.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2013 november 21, 17:43
Írta: besirkyjh Dátum 2013 november 21, 17:43
Szia
Linearis encoderre gondolsz ?( utméröre )
Egyszerübb lenne ha tennél egy erösebb léptetöt és egy kategoriával jobb vezérlöt használnál !
Esetleg más oprendszerröl hajtanád a géped .
Linearis encoderre gondolsz ?( utméröre )
Egyszerübb lenne ha tennél egy erösebb léptetöt és egy kategoriával jobb vezérlöt használnál !
Esetleg más oprendszerröl hajtanád a géped .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 21, 19:58
Írta: 000000000 Dátum 2013 november 21, 19:58
Ha, jól emlékszem, ezt már kérdezted párszor. Mindig az volt a válasz: Nem!
Most is az: Nem lehet.
Jól megválasztott motor, vezérlő, és beállítás a megoldás.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 22, 18:35
Írta: 000000000 Dátum 2013 november 22, 18:35
Üdv!
Keresem azt a bejegyzést ahol arról esett szó,hogy a léptetők milyen sebeséggel illetve miben másak,soros vagy párhuzamos bekötésben.
Tudja valaki hogy hol van ez a rész?
valamelyik módban gyorsabb de gyengéb stb...ilyesmire emlékszem.
Keresem azt a bejegyzést ahol arról esett szó,hogy a léptetők milyen sebeséggel illetve miben másak,soros vagy párhuzamos bekötésben.
Tudja valaki hogy hol van ez a rész?
valamelyik módban gyorsabb de gyengéb stb...ilyesmire emlékszem.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 22, 18:40
Írta: 000000000 Dátum 2013 november 22, 18:40
Soros kötésben nagyobb fordulatot tudsz elérni. De lényegesen gyengébb lesz a motor.
Én, kevés kivétellel, párhuzamost alkalmazok.
Cím: Re:Léptetőmotor
Írta: RogerCo Dátum 2013 november 22, 18:48
Írta: RogerCo Dátum 2013 november 22, 18:48
A 8-vezetékes motorok nagyobb fokú rugalmasságot kínálnak a rendszertervező számára, mert csatlakoztathatók sorosan és párhuzamosan is, számos alkalmazásnak felelve meg ezzel. Ne felejtse el, hogy két tekercs párhuzamos csatlakoztatásakor a tekercs induktivitása feleződik, és a motor sebessége jelentősen megnövekedhet. A soros csatlakoztatás megnövekedett induktivitást eredményez, és a motor csak kis sebességen működik.
A soros motor csatlakoztatást rendszerint olyan esetben kell alkalmazni, ahol nagyobb nyomatékra van szükség alacsonyabb sebességen. Mivel ez konfiguráció rendelkezik a legnagyobb induktivitással, a teljesítmény csökken nagyobb sebességeknél. A csúcs kimeneti áram meghatározásához használja a fázisonkénti (vagy egypólusú) áramot, vagy szorozza meg a kétpólusú áramot 1,4-gyel.
Ne felejtse el, hogy két tekercs párhuzamos csatlakoztatásakor a tekercsek induktivitása felére csökken, és a motor sebessége jelentősen megnőhet. A soros csatlakozás megnövekedett induktivitást eredményez, így a motor csak alacsonyabb sebességeken használható.
Egy 8-vezetékes motor párhuzamos konfigurációban stabilabb, de kisebb nyomatékot kínál alacsonyabb sebességen. Az alacsonyabb induktivitás miatt magasabb lesz a nyomaték a nagyobb sebességeknél. Szorozza meg a fázisonkénti (vagy egypólus) áramot 1,96-tal, vagy a bipoláris áramot 1,4-gyel a csúcs kimeneti áram meghatározásához.
A soros motor csatlakoztatást rendszerint olyan esetben kell alkalmazni, ahol nagyobb nyomatékra van szükség alacsonyabb sebességen. Mivel ez konfiguráció rendelkezik a legnagyobb induktivitással, a teljesítmény csökken nagyobb sebességeknél. A csúcs kimeneti áram meghatározásához használja a fázisonkénti (vagy egypólusú) áramot, vagy szorozza meg a kétpólusú áramot 1,4-gyel.
Ne felejtse el, hogy két tekercs párhuzamos csatlakoztatásakor a tekercsek induktivitása felére csökken, és a motor sebessége jelentősen megnőhet. A soros csatlakozás megnövekedett induktivitást eredményez, így a motor csak alacsonyabb sebességeken használható.
Egy 8-vezetékes motor párhuzamos konfigurációban stabilabb, de kisebb nyomatékot kínál alacsonyabb sebességen. Az alacsonyabb induktivitás miatt magasabb lesz a nyomaték a nagyobb sebességeknél. Szorozza meg a fázisonkénti (vagy egypólus) áramot 1,96-tal, vagy a bipoláris áramot 1,4-gyel a csúcs kimeneti áram meghatározásához.
Cím: Re:Léptetőmotor
Írta: RogerCo Dátum 2013 november 22, 18:49
Írta: RogerCo Dátum 2013 november 22, 18:49
Az idéző jelek lemaradtak :(
Ez egy idézet akart lenni.
Ez egy idézet akart lenni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 22, 19:25
Írta: 000000000 Dátum 2013 november 22, 19:25
Azt hiszem így a legkönnyebb átlátni a különbségeket:
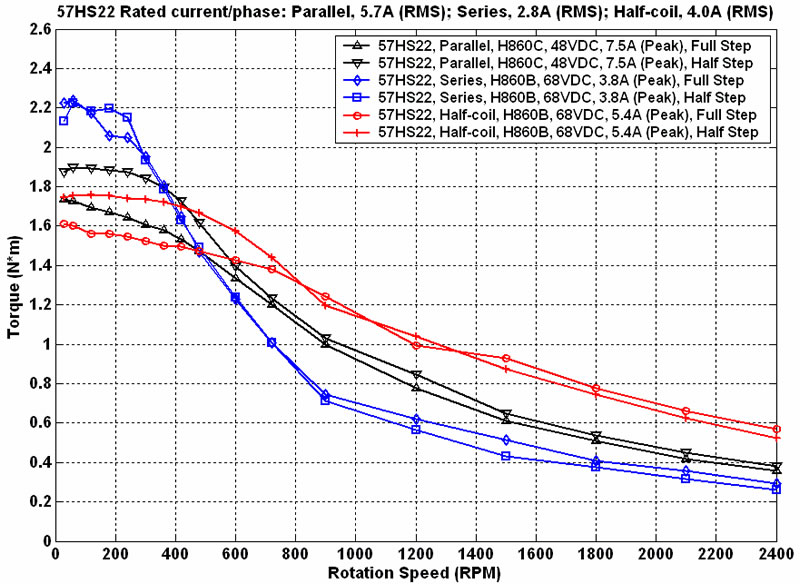
Ez egy 2.2Nm-es motor párhuzamos,soros, fél tekercs módban felvett nyomaték-fodulatszám görbéje.
Ez egy 2.2Nm-es motor párhuzamos,soros, fél tekercs módban felvett nyomaték-fodulatszám görbéje.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 22, 19:33
Írta: 000000000 Dátum 2013 november 22, 19:33
[#eljen][#taps]
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2013 november 22, 20:05
Írta: ANTAL GÁBOR Dátum 2013 november 22, 20:05
Ez már csak akkor lenne még szemléletesebb ha a párhuzamos üzemet is 68 V on mérték volna illetve a Half coil nál is csak 3.8 A lett volna a motoráram .( 600 as fordulatnál már a half coil győz mert 5.4 amperral megy a motor. Ez figyelemreméltó mert valószínüleg a keletkezett hőt le tudja adni a környezetnek ( csak egy tekercs melegszik )
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 22, 20:59
Írta: 000000000 Dátum 2013 november 22, 20:59
Tudod, statisztikával, és grafikonnal mindent el lehet adni.
Csak nem mindenkinek?))
Véleményem szerint, a paralel, 68 volton tovább tartaná a jobb nyomatékot.
Az, az, nagyobb fordulattartományba lehetne dinamikusabban használni.
Nekem, több motorral való kísérletezésem ezt mutatta.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 23, 09:07
Írta: 000000000 Dátum 2013 november 23, 09:07
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2013 november 23, 13:13
Írta: c2nsu773m Dátum 2013 november 23, 13:13
16400
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2013 november 23, 13:20
Írta: Vetesi75 Dátum 2013 november 23, 13:20
Elképzelhető, hogy azért adnak meg párhuzamos üzemhez alacsonyabb csúcsfeszültséget, mert a tekercs szigetelése nem viselne el nagyobbat biztonságosan?
Ilyen jellegű határadatot, miért nem szokás közölni az adatlapokon?
Ilyen jellegű határadatot, miért nem szokás közölni az adatlapokon?
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2013 november 23, 13:32
Írta: Vetesi75 Dátum 2013 november 23, 13:32
Elbizonytalanodtam. 8718M-16P motoromat merjem járatni 60V csúcsfeszültséggel? Az adatlapon 48V-hoz tartozó grafikon található.
http://www.alltronics.com/mas_assets/acrobat/28M028.pdf
http://www.alltronics.com/mas_assets/acrobat/28M028.pdf
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 23, 15:38
Írta: 000000000 Dátum 2013 november 23, 15:38
A feszültség, átütése szempontjából teljesen mindegy, soros vagy párhuzamos a kötés.
Nyugodtan járathatod 60 voltról a motorod.
Az átütési feszültség 100 volt fölött van, egészen biztosan.
Az isten se tudja, mikor, miért úgy tesztelik a motorokat, ahogy.
A grafikon, csak irányadó. Következtetések levonására. Nem szentírás.
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2013 november 23, 16:24
Írta: Vetesi75 Dátum 2013 november 23, 16:24
Köszönöm! Megnyugtató a válasz. Különösképp, hogy a motor-tápegység már végleges formájában van.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2013 november 23, 18:53
Írta: ANTAL GÁBOR Dátum 2013 november 23, 18:53
Ha át akarna ütni akkor azt a half coilnál is megtenné . Ha rákeresel egy zománcszigetelésű huzal átütési szilárdságára akkor sokkal nagyobb értéket fogsz találni. Egyszerűen csak Kinai . Lehet hogy a sárgának nem volt nagyobb tápegysége mert, sok logika az nincs benne mint azt a 4121 ben írtam
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 23, 19:55
Írta: 000000000 Dátum 2013 november 23, 19:55
Na meg a másik az, hogy az átütés az két menet közt értendő.
Arra egy motor tekercsénél kevés az esély, hogy az első és az utolsó menet egymás mellett legyen.
Ha van tizen-huszon menet, akkor a tápfesz annyiad része van két menet közt. A menetek tekercseléstől függően lehet pár menet egymáson, mert miért ne, de akkor sincs köztük akkora feszültség különbség, hogy átüthessen.
Egy 60-80V-ról járó motorban is ugyan az a zománcdrót van, mint egy 400-660V-os motorban.
Arra egy motor tekercsénél kevés az esély, hogy az első és az utolsó menet egymás mellett legyen.
Ha van tizen-huszon menet, akkor a tápfesz annyiad része van két menet közt. A menetek tekercseléstől függően lehet pár menet egymáson, mert miért ne, de akkor sincs köztük akkora feszültség különbség, hogy átüthessen.
Egy 60-80V-ról járó motorban is ugyan az a zománcdrót van, mint egy 400-660V-os motorban.
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2013 november 23, 22:44
Írta: Vetesi75 Dátum 2013 november 23, 22:44
Andrásnak is: A zománc huzal szigetelésével (aminek átütési szilárdsága papíron leírva és labor körülmények között mérve nem igazán megkérdőjelezhető) tisztában vagyok, csak az a kérdés, hogy (ismerve a kicsi sárgák technológiai igényességét és a huzal minőségére, illetve hosszára tekintettel) ez mennyire vehető alapul?
Gondolva itt a sorosan kötött kapacitások dielektrikumtól is függő feszültség megosztására... Bár, ha egy meneten belül is 500V-ot szigetel, abból baj nem lehet... :)
Gondolva itt a sorosan kötött kapacitások dielektrikumtól is függő feszültség megosztására... Bár, ha egy meneten belül is 500V-ot szigetel, abból baj nem lehet... :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 23, 23:17
Írta: 000000000 Dátum 2013 november 23, 23:17
Nyugodtan nyomd rá a hatvanat. Olyan nincs, hogy 48 még biztosan jó, hatvan meg átüt.
Ha, átüt 60 –on, akkor, 48 -on is, hamarosan. Az átütés, biztosan nem lesz gond. Ha, nem selejt a motor. Akkor, pedig ha selejt, mindenhogy rövidéletű lesz.
Azt így nem tudja sem a Kínai, se más elkészíteni. A tűrések, ettől sokkal messzebb vannak. Még náluk is.
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2013 november 24, 00:08
Írta: Vetesi75 Dátum 2013 november 24, 00:08
Nyugodt leszek. Csak elmélkedtem egy keveset... Elvégre a gyári vezérlők használatakor is ez a feszültségszint a megszokott.
Nálam még a vezérlő függőben van. Egyelőre sk. alkatrésztemető van kilátásban, ha meg az nem jön össze, akkor MSD(D)80 lesz - persze majd idővel, ha "kedvem" i$ akad hozzá. Remélem jövőhéten kiderül végre, mire jutottam a vezérelhető áramgenerátoraimmal. (Kapcsolóüzemű kütyü - a léptecs meg ugye elektromechanikus szerkentyű és gyanítom másképp fog viselkedni, mint a műterhelés.)
Nálam még a vezérlő függőben van. Egyelőre sk. alkatrésztemető van kilátásban, ha meg az nem jön össze, akkor MSD(D)80 lesz - persze majd idővel, ha "kedvem" i$ akad hozzá. Remélem jövőhéten kiderül végre, mire jutottam a vezérelhető áramgenerátoraimmal. (Kapcsolóüzemű kütyü - a léptecs meg ugye elektromechanikus szerkentyű és gyanítom másképp fog viselkedni, mint a műterhelés.)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 24, 00:40
Írta: 000000000 Dátum 2013 november 24, 00:40
Igen, arra figyelj, hogy a vezérlő magasabb feszültségű legyen, mint amivel járatni akarod.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 november 24, 08:54
Írta: 000000000 Dátum 2013 november 24, 08:54
Köszönöm mindenki segitségét!
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2013 december 14, 06:51
Írta: ht0cjk58i Dátum 2013 december 14, 06:51
Üdv Urak.Nem tudja valaki milyen nyomatéka van a Vextra C7092-9212 ill. C7093-9212 léptetőknek.Illetve hogyan tudnám kiszámolni a nyomatékát?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2013 december 14, 07:57
Írta: besirkyjh Dátum 2013 december 14, 07:57
Szia
A tartonyomatékát tudod megnézni : R 100mm-es erökar és egy müanyag flakon amit addig töltesz vizzel mig a motor megtudja tartani , utánna ezt egy mérlegen leméred és kész is .Ugyan ezzel a modszerrel megállapithato a hajtás igény is .
Olyan szempontbol jo ez hogy a léptetöd mostani állapotában kapsz adatot rola ( öreg , szét volt szedve stb ) .A léptetöre irt adatokat kel rá adni .
Ránézésre a kisebbik kb 0.5Nm és a nagyobb kb 1.2 és 1.5Nm közötti .
A tartonyomatékát tudod megnézni : R 100mm-es erökar és egy müanyag flakon amit addig töltesz vizzel mig a motor megtudja tartani , utánna ezt egy mérlegen leméred és kész is .Ugyan ezzel a modszerrel megállapithato a hajtás igény is .
Olyan szempontbol jo ez hogy a léptetöd mostani állapotában kapsz adatot rola ( öreg , szét volt szedve stb ) .A léptetöre irt adatokat kel rá adni .
Ránézésre a kisebbik kb 0.5Nm és a nagyobb kb 1.2 és 1.5Nm közötti .
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2013 december 14, 08:23
Írta: ht0cjk58i Dátum 2013 december 14, 08:23
Köszi!
Cím: Re:Léptetőmotor
Írta: hedbu09tz Dátum 2013 december 14, 21:10
Írta: hedbu09tz Dátum 2013 december 14, 21:10
Sziasztok!
Van egy kis problémám az egyik léptetőmotorommal.
Üresen,tehát amikor csak a kezemben tartom és elindítom bármelyik irányba,rövid megindulás után megáll és csak zúg.Ha megismétlem akárhányszor akkor ue.
Ha viszont a palástjánál körbe markolom és enyhén megszorítom a kezemmel akkor szépen megy.
Próbáltam a rögzítő csavarjain szorítani,lazítani stb.De nincs hatással rá.Ha össze van kötve a hajtással akkor is nagyon neház úgy beállítani,hogy szépen menjen.Valamelyik ponton ahol nagyobb ellenállással találkozik ugyanúgy megáll és zúg.
Mi lehet ez?Találkoztatok már ilyennel?
Van egy kis problémám az egyik léptetőmotorommal.
Üresen,tehát amikor csak a kezemben tartom és elindítom bármelyik irányba,rövid megindulás után megáll és csak zúg.Ha megismétlem akárhányszor akkor ue.
Ha viszont a palástjánál körbe markolom és enyhén megszorítom a kezemmel akkor szépen megy.
Próbáltam a rögzítő csavarjain szorítani,lazítani stb.De nincs hatással rá.Ha össze van kötve a hajtással akkor is nagyon neház úgy beállítani,hogy szépen menjen.Valamelyik ponton ahol nagyobb ellenállással találkozik ugyanúgy megáll és zúg.
Mi lehet ez?Találkoztatok már ilyennel?
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2013 december 14, 21:32
Írta: ANTAL GÁBOR Dátum 2013 december 14, 21:32
Találkoztam hasonlóval . Kopogtattam lazítgattam szorítottam azután kidobtam ( persze elötte szétszedtem ) Szerintem a lemezeléséből levált egy nagyon kicsi darab ami beszorult a légrésbe . Amikor sikerült úgy szorítani hogy ment én (is )Uri Gellernek képzeletem magam
Cím: Re:Léptetőmotor
Írta: hedbu09tz Dátum 2013 december 14, 21:39
Írta: hedbu09tz Dátum 2013 december 14, 21:39
Azt hogy menjen elég könnyű reprodukálni kézben,felszerelés után-amikor egyszer be van állítva akkor stabilan működik,de ameddig eljutok odáig az az idegőrlő:(
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2013 december 15, 05:32
Írta: besirkyjh Dátum 2013 december 15, 05:32
Szia
Ne szedd szét !!
Ha nincs a vezérlöre dugva akkor szépen "kattogosan" körbetudod forgatni ?
Fizikailag nincs sérülve , tengelye nem üt , csapágyai jok ?Pici a valoszinüsége hogy belül sérült vagy koszos legyen .
Mekkora ez a léptetö és milyen beállitásokkal hajtod ( tápfesz , áram , mikrostep stb ) ,Volt-e már szét szedve ?
Nagyobb pl : Nema34-es vagy hosszu Nema23-as léptetöknél tipikus jelenség kézben tartásnál hogy forgás közben leáll és csak bug .Ez nem hiba csak egyszerüen nem birod mereven pozicioban tartani a külsörészt .Tedd a földre és taposs rá és ugy probáld vagy szoritsd a földre a kezeddel és ugy .
Lehet még tul nagy fázis áramtol is vagy tul nagy dinamikátol is és tul nagy fordulatttol is tul nagy mikrostepptöl is ( vezérlö függö ) és lehet még a tápegység is kevés !
Ezek nem hibák csak a paraméterek rosszul vannak megválasztva a vezérlö szoftverben (Mach3 ? ) .
Ne szedd szét !!
Ha nincs a vezérlöre dugva akkor szépen "kattogosan" körbetudod forgatni ?
Fizikailag nincs sérülve , tengelye nem üt , csapágyai jok ?Pici a valoszinüsége hogy belül sérült vagy koszos legyen .
Mekkora ez a léptetö és milyen beállitásokkal hajtod ( tápfesz , áram , mikrostep stb ) ,Volt-e már szét szedve ?
Nagyobb pl : Nema34-es vagy hosszu Nema23-as léptetöknél tipikus jelenség kézben tartásnál hogy forgás közben leáll és csak bug .Ez nem hiba csak egyszerüen nem birod mereven pozicioban tartani a külsörészt .Tedd a földre és taposs rá és ugy probáld vagy szoritsd a földre a kezeddel és ugy .
Lehet még tul nagy fázis áramtol is vagy tul nagy dinamikátol is és tul nagy fordulatttol is tul nagy mikrostepptöl is ( vezérlö függö ) és lehet még a tápegység is kevés !
Ezek nem hibák csak a paraméterek rosszul vannak megválasztva a vezérlö szoftverben (Mach3 ? ) .
Cím: Re:Léptetőmotor
Írta: hedbu09tz Dátum 2013 december 15, 10:39
Írta: hedbu09tz Dátum 2013 december 15, 10:39
Köszönöm.Én is arra gondoltam,hogy nincs baja.Szétszedésre sem vetemedek.Ez egy 2.1 A es motor és úgy van ahogy mondod.Szépen körbe kattogva forog.A tengelye is jól fut és ha mereven tartom akkor forog szépen.Megnézem ezeket a beállításokat.A másik tengelyeimen ugyanilyen motorok vannak és azokkal nincs baj.Létezik hogy tengelyenként is lehet állítani valamit.A vezérlő panelen úgy emlékszem hogy minden jumper ugyanúgy van minden tengelynél.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2013 december 15, 10:40
Írta: PSoft Dátum 2013 december 15, 10:40
Már tapasztaltam kisebb(Nema17)motoroknál is ezt a jelenséget.
Szinte mindig,a helytelenül megválasztott/beállított motorparaméterekre vezethető vissza.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2013 december 15, 10:47
Írta: 000000000 Dátum 2013 december 15, 10:47
Kösd át a motorodat arra a step vezérlőre, amivel a másik ugyan ilyen jól működik. Így eldöntheted, hol a hiba: motornál vagy meghajtónál.
Cím: Re:Léptetőmotor
Írta: hedbu09tz Dátum 2013 december 15, 16:54
Írta: hedbu09tz Dátum 2013 december 15, 16:54
Közben állítgattam a motor tunningot.Úgy néz ki egyelőre megoldódott,Köszönöm.
Cím: Re:Léptetőmotor
Írta: Thowra Dátum 2013 december 31, 13:55
Írta: Thowra Dátum 2013 december 31, 13:55
Üdv mindenkinek!
Kaptam pár különböző léptetőmotort amiben van egy közös dolog. Ez a dolog, hogy kisfeszültségű, nagyáramú motorok.
Adattábla szerint
Iu:2.2A
Ib:3.2A
Rw:0.7 Ohn
Kb 1,5-2.2V kellene neki.
Milyen vezérlőt ajánlotok hozzá?
Viszonylag keveset menne a motor, "C" tengely lenne.
Kaptam pár különböző léptetőmotort amiben van egy közös dolog. Ez a dolog, hogy kisfeszültségű, nagyáramú motorok.
Adattábla szerint
Iu:2.2A
Ib:3.2A
Rw:0.7 Ohn
Kb 1,5-2.2V kellene neki.
Milyen vezérlőt ajánlotok hozzá?
Viszonylag keveset menne a motor, "C" tengely lenne.
Cím: Re:Léptetőmotor
Írta: pv5iuhiks Dátum 2014 január 04, 19:44
Írta: pv5iuhiks Dátum 2014 január 04, 19:44
Üdv mindenkinek
szeretném kérdezni mit tudtok EM 93 motorrol[#wink]
szeretném kérdezni mit tudtok EM 93 motorrol[#wink]
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 január 04, 19:53
Írta: s7manbs8 Dátum 2014 január 04, 19:53
Mutasd meg, az valami kicsi motor lehet szerintem.
Cím: Re:Léptetőmotor
Írta: pv5iuhiks Dátum 2014 január 04, 20:00
Írta: pv5iuhiks Dátum 2014 január 04, 20:00
epson nyomtato motor
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2014 január 04, 20:37
Írta: PSoft Dátum 2014 január 04, 20:37
Cím: Re:Léptetőmotor
Írta: pv5iuhiks Dátum 2014 január 04, 20:47
Írta: pv5iuhiks Dátum 2014 január 04, 20:47
szerinted jo lehet H1 vezérlőhőz
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 január 04, 21:13
Írta: s7manbs8 Dátum 2014 január 04, 21:13
Nézzed már ez az a jó fajta kis motor nekem is van egy ilyen még az 1W lézerhez tettem fel csak még épül az is.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 január 04, 21:13
Írta: s7manbs8 Dátum 2014 január 04, 21:13
Ha ennyire kicsi áramot lehet rajta állítani, akkor azzal működnie kell. 750mA-t.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2014 január 04, 21:41
Írta: PSoft Dátum 2014 január 04, 21:41
A leírás szerint,igen.
A második oldalon írja:
- Tengelyenkénti trimmeres motoráram beállítás,
- 0.1A - 4.7A /fázis motoráram szabályzási tartomány, konstans motorteljesítményre,
- Maximális motor tápfeszültség: 50V,
A hatodik oldalon,...a motorod bekötése.
Cím: Re:Léptetőmotor
Írta: pv5iuhiks Dátum 2014 január 05, 18:42
Írta: pv5iuhiks Dátum 2014 január 05, 18:42
köszi szépen
Cím: Re:Léptetőmotor
Írta: 3vv2btrhv Dátum 2014 január 06, 11:16
Írta: 3vv2btrhv Dátum 2014 január 06, 11:16
Nekem van egy 4 kivezetéses léptetö motorom , és H1 vezérlöm , a leirás szerint csak 6 , vagy 8 vezetékest lehet bekötni , a négyest nem ???
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 január 06, 11:23
Írta: 000000000 Dátum 2014 január 06, 11:23
4 kivezetéses 2 fázisú léptetőmotort csak bipoláris vezérlővel lehet hajtani, a H1 pedig nem az.
Cím: Re:Léptetőmotor
Írta: 3vv2btrhv Dátum 2014 január 06, 12:46
Írta: 3vv2btrhv Dátum 2014 január 06, 12:46
Somoru vagyok .
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2014 január 08, 20:09
Írta: juh0557j0 Dátum 2014 január 08, 20:09
Ki kell vezetni a hiányzó vezetékeket is! Nekem már többször sikerült. A hátsó pajzsot lebontva találsz egy kis nyákot amire a tekercsvégek és a kivezető kábelek forrasztva vannak. A hiányzó helyekre be kell forrasztani a vezetékeket!
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2014 január 08, 20:12
Írta: juh0557j0 Dátum 2014 január 08, 20:12
Valaki használt már IM483I léptetőmotor vezérlőt?
Van 2 db de sajna úgy látom, hogy nem step-dires.
IM483I
Van 2 db de sajna úgy látom, hogy nem step-dires.
IM483I
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2014 január 08, 20:14
Írta: s5f8tmfv3 Dátum 2014 január 08, 20:14
Ezt miből gondolod? Ott van:
Optically isolated logic inputs: step, direction, enable and reset
Optically isolated logic inputs: step, direction, enable and reset
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2014 január 08, 20:57
Írta: juh0557j0 Dátum 2014 január 08, 20:57
Abból, hogy megnéztem a pdf- ben a bekötéseket és ott nincsenek ilyenek.
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2014 január 08, 21:13
Írta: s5f8tmfv3 Dátum 2014 január 08, 21:13
Erre gondolsz? A P1 csatlakozón 2-es láb Step, 3-as Dir.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 január 08, 21:20
Írta: 000000000 Dátum 2014 január 08, 21:20
IM483 vezérlőnél ok, de Attilának IM483I van.
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2014 január 08, 21:52
Írta: s5f8tmfv3 Dátum 2014 január 08, 21:52
Hm. Akkor valamit benéztem, Az Ő linkjén lévő pdf-et néztem.
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2014 január 09, 15:56
Írta: juh0557j0 Dátum 2014 január 09, 15:56
Igen, az I betű a végén a probléma.
Ez sajna nem a step-dires változat.
Ez sajna nem a step-dires változat.
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2014 január 09, 16:02
Írta: s5f8tmfv3 Dátum 2014 január 09, 16:02
Érdekes hogy pont a Te linkeden az I-st írja step-dir bemenettel. Neked milyen pdf-ed van hozzá?
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2014 január 09, 16:40
Írta: juh0557j0 Dátum 2014 január 09, 16:40
Az én linkem PDF-je nem írja step-diresnek. A kezdőlapon a felsorolásban az van, de ha a downloads fülön leszeded a pdf-et, akkor láthatod a bekötését.
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2014 január 09, 16:42
Írta: juh0557j0 Dátum 2014 január 09, 16:42
Úgy látom, hogy ebbe be lehet tölteni egy programot és azt tudja végrehajtani. Egy cél robotban lehetett beépítve.
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2014 január 09, 18:23
Írta: s5f8tmfv3 Dátum 2014 január 09, 18:23
Akkor passz. A linkeden step/dires, alul a pdf-ben szintén, csak az már nem I-s. Te nem ezt a pdf-et nézed?
Cím: Re:Léptetőmotor
Írta: ebalint Dátum 2014 január 09, 18:44
Írta: ebalint Dátum 2014 január 09, 18:44
Én ebben a pdf-ben a 34 pin-es csatlakozó 21, 22 pinen step és dir jeleket látok. Nagyon nem nézegettem, de ez biztosan az I végű cuccé.
Itt :PDF
Itt :PDF
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 január 09, 19:02
Írta: 000000000 Dátum 2014 január 09, 19:02
Ez mind szép és jó, hogy step meg dir, csak sajnos 'output' mind a kettő.
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2014 január 10, 07:30
Írta: s5f8tmfv3 Dátum 2014 január 10, 07:30
Az a két pont az indexer kimenete. A blokkséma szerint az indexer csak a driver felé küld jeleket. Nem lehet hogy az a két pont egyben a driver bemenete is?
Cím: Re:Léptetőmotor
Írta: ebalint Dátum 2014 január 10, 07:39
Írta: ebalint Dátum 2014 január 10, 07:39
Cím: Re:Léptetőmotor
Írta: ebalint Dátum 2014 január 10, 07:41
Írta: ebalint Dátum 2014 január 10, 07:41
Cím: Re:Léptetőmotor
Írta: Benel Dátum 2014 január 10, 09:29
Írta: Benel Dátum 2014 január 10, 09:29
Szia!
A vezérlő soros proton keresztül érhető el.
Saját utasítás készlete van, ez letölthető a kontrollerbe. (tipikus robot vezérlés).
Kell hozzá a soros porti illesztő is.
Encoder input is van benne!
A vezérlő soros proton keresztül érhető el.
Saját utasítás készlete van, ez letölthető a kontrollerbe. (tipikus robot vezérlés).
Kell hozzá a soros porti illesztő is.
Encoder input is van benne!
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2014 január 10, 09:44
Írta: besirkyjh Dátum 2014 január 10, 09:44
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2014 január 10, 22:16
Írta: juh0557j0 Dátum 2014 január 10, 22:16
A linkemen I-s van és 34 pines csatlakozó. Ezen ami van step és dir az kimenet!
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2014 január 10, 22:23
Írta: juh0557j0 Dátum 2014 január 10, 22:23
Igen, pontosan ugyanilyen. Megvan a soros illesztő is rajta.
Valóban ez egy termelésben használt cél robot vezérlése lehetett. Ezek szerint Lonewolf is árul ilyeneket.
Majd ha unatkozom játszok egy kicsit vele, de azt már sejtem, hogy ebből habvágó vezérlés nem lesz :-)
Valóban ez egy termelésben használt cél robot vezérlése lehetett. Ezek szerint Lonewolf is árul ilyeneket.
Majd ha unatkozom játszok egy kicsit vele, de azt már sejtem, hogy ebből habvágó vezérlés nem lesz :-)
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2014 január 11, 11:42
Írta: s5f8tmfv3 Dátum 2014 január 11, 11:42
Igen már látom. Azok az indexer kimenetei, tehát a driver bemenete biztosan step/dir. A blokkséma szerint az indexer jelei mennek a driverbe, ott talán meg lehetne csípni a driver bemenetét, kihagyva az indexert. Vagy rosszul gondolom?
Cím: Re:Léptetőmotor
Írta: szf Dátum 2014 január 13, 19:03
Írta: szf Dátum 2014 január 13, 19:03
Üdv
Valaki nem ismeri véletlenül ezt a léptetőmotort: KS-085.2-200-r0?
Mik lehetnek a paraméterei,milyen vezérlő kell hozzá?
Valaki nem ismeri véletlenül ezt a léptetőmotort: KS-085.2-200-r0?
Mik lehetnek a paraméterei,milyen vezérlő kell hozzá?
Cím: Re:Léptetőmotor
Írta: juh0557j0 Dátum 2014 január 15, 00:43
Írta: juh0557j0 Dátum 2014 január 15, 00:43
Én is ebben reménykedek. Valamikor talán lesz rá idő, hogy kitaláljam.
Cím: Re:Léptetőmotor
Írta: Etib Dátum 2014 január 15, 10:39
Írta: Etib Dátum 2014 január 15, 10:39
Léptető motorok áttételezésével kapcsolatosan tudtok tanácsot adni? ! Nm-es motort 5mm-es menetemelkedésű golyósorsóhoz illeszteném, 300 mm hasznos hosszal, fém megmunkáláshoz.
Előre is köszi.
Előre is köszi.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 január 15, 10:46
Írta: 000000000 Dátum 2014 január 15, 10:46
Az optimális áttételhez még kellene minimum tudni:
orsó átmérő, teljes hossz, motor J, motor M, mozgatott tömeg.
orsó átmérő, teljes hossz, motor J, motor M, mozgatott tömeg.
Cím: Re:Léptetőmotor
Írta: Etib Dátum 2014 január 15, 11:20
Írta: Etib Dátum 2014 január 15, 11:20
Összegyűjtöm ezeket az adatokat és jelentkezem Nálad.
Cím: Re:Léptetőmotor
Írta: Etib Dátum 2014 január 15, 19:44
Írta: Etib Dátum 2014 január 15, 19:44
Kedves Tibor45!
Az adatok a következők:
X orsó : átmérő 20mm, menet emelkedés:5 mm, hossz: 600mm, mozgás tartomány :300 mmm
y orsó:átm: 30mm menetemelkedés:5mm, hossz 350mm , mozgás tartomány :150 mm
Z tengely orsó mint az Y tengely, csak a mozgás tartomány 250 mm.
Mozgó tömeg x, y síkban :60 kg + munkadarab max 20kg= max 80 kg.
Mozgó tömeg Z-n : 25 kg
Motorok : x,y orsón: L32RFD hibrid step motor 4.8Nm ,6A/70 V , motor J 0,12 Kgm^2*10-3 , tömeg 2.4kg
motor Z-n:vagy mint x,y-n, vagy hn 200 3451 0900 8Nm, J :4900 gcm^2, tömeg 4.9 kg.
Segítségedet előre is köszönöm.
Üdvözlettel:Tibor
Az adatok a következők:
X orsó : átmérő 20mm, menet emelkedés:5 mm, hossz: 600mm, mozgás tartomány :300 mmm
y orsó:átm: 30mm menetemelkedés:5mm, hossz 350mm , mozgás tartomány :150 mm
Z tengely orsó mint az Y tengely, csak a mozgás tartomány 250 mm.
Mozgó tömeg x, y síkban :60 kg + munkadarab max 20kg= max 80 kg.
Mozgó tömeg Z-n : 25 kg
Motorok : x,y orsón: L32RFD hibrid step motor 4.8Nm ,6A/70 V , motor J 0,12 Kgm^2*10-3 , tömeg 2.4kg
motor Z-n:vagy mint x,y-n, vagy hn 200 3451 0900 8Nm, J :4900 gcm^2, tömeg 4.9 kg.
Segítségedet előre is köszönöm.
Üdvözlettel:Tibor
Cím: Re:Léptetőmotor
Írta: Etib Dátum 2014 január 15, 19:56
Írta: Etib Dátum 2014 január 15, 19:56
Azt elfelejtettem írni, hogy a z tengelyt ellensúlyos megoldással gondoltam kiegyensúlyozni. Változtat ez valamin? Lehet így kisebb motort is felrakni?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 január 16, 08:36
Írta: 000000000 Dátum 2014 január 16, 08:36
Eredmények:
X: optimális lassító áttétel: 1.37 (1:1-nél csak 9%-ot veszítesz a maximális gyorsulásból, tehát még direktbe is mehetsz)
Y: optimális lassító áttétel: 1.81 ( a nagy orsó átmérő miatt ide már sajnos kell az áttétel)
Z: optimális lassító áttétel: 1.79 (~2-es áttétel javasolt, és akkor ellensúly sem kell)
Z / 8 Nm -es motorral: 1.23, de nem javasolt, mert nagyon érzékeny az áttételre (nagy meredekségű a függvény az optimumpont környezetében, és dinamikailag is gyegébb megoldás a nagy motor J miatt).
X: optimális lassító áttétel: 1.37 (1:1-nél csak 9%-ot veszítesz a maximális gyorsulásból, tehát még direktbe is mehetsz)
Y: optimális lassító áttétel: 1.81 ( a nagy orsó átmérő miatt ide már sajnos kell az áttétel)
Z: optimális lassító áttétel: 1.79 (~2-es áttétel javasolt, és akkor ellensúly sem kell)
Z / 8 Nm -es motorral: 1.23, de nem javasolt, mert nagyon érzékeny az áttételre (nagy meredekségű a függvény az optimumpont környezetében, és dinamikailag is gyegébb megoldás a nagy motor J miatt).
Cím: Re:Léptetőmotor
Írta: Etib Dátum 2014 január 16, 09:11
Írta: Etib Dátum 2014 január 16, 09:11
Ezer köszönet a munkádért!
Cím: Re:Léptetőmotor
Írta: Thowra Dátum 2014 január 16, 21:28
Írta: Thowra Dátum 2014 január 16, 21:28
Üdv!
Van pár bipoláris motorom amihez szeretnék segítséget kérni. Eddig egy TB6560 at fogyasztott el max 1A es áramkorláttal beállítva :(.
Iu:2.2A
Ib:3.2A
Rw:0.7 Ohn
Milyen vezérlőt ajánlotok hozzá?
Viszonylag keveset menne a motor, "C" tengely lenne.
Van pár bipoláris motorom amihez szeretnék segítséget kérni. Eddig egy TB6560 at fogyasztott el max 1A es áramkorláttal beállítva :(.
Iu:2.2A
Ib:3.2A
Rw:0.7 Ohn
Milyen vezérlőt ajánlotok hozzá?
Viszonylag keveset menne a motor, "C" tengely lenne.
Cím: Re:Léptetőmotor
Írta: Thowra Dátum 2014 január 16, 22:17
Írta: Thowra Dátum 2014 január 16, 22:17
Találtam egy ilyen vezérlőt, mi a véleményetek róla? Használ esetleg közületek valaki ilyet (ha igen, mi a a tapasztalata)? A panelen lévő TB6600 ic t nem ismerem, nem kellene védődióda a motor kivezetésekre?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 január 16, 22:22
Írta: 000000000 Dátum 2014 január 16, 22:22
Vagy be van integrálva az IC-be, vagy a panel túloldalán megtalálható, bár inkább a második lehetőség esélyesebb.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2014 január 17, 05:03
Írta: besirkyjh Dátum 2014 január 17, 05:03
Szia
Csak azért mert nagyobb a beállithato árama még ugyan ugy elfogja " fogyasztani " a motorod ezt is .
A 6560 szerintem jo választás ehhez a léptetöhöz (is ) .Más lesz ott a gond !
Pár sort irj az " elfogyasztott " elektromikárol és környezetéröl .
Csak azért mert nagyobb a beállithato árama még ugyan ugy elfogja " fogyasztani " a motorod ezt is .
A 6560 szerintem jo választás ehhez a léptetöhöz (is ) .Más lesz ott a gond !
Pár sort irj az " elfogyasztott " elektromikárol és környezetéröl .
Cím: Re:Léptetőmotor
Írta: Thowra Dátum 2014 január 17, 16:13
Írta: Thowra Dátum 2014 január 17, 16:13
Üdv!
Az elektronika egy egytengelyes panel TB6560AHQ val 100pF kondi (saját terv egy gyári rajz alapján). 12V ról ment 0,5-1A limittel melegedés nélkül. Tokon kívül voltak védődiódák. A hiba menet közbe jelentkezett, egyszerűen megugrott az áram és letiltott a táp 3A nál. Mint kiderült az ic egyik fele lett zárlatos + táp irányba a motorra menő egyik kivezetés.
Az elektronika egy egytengelyes panel TB6560AHQ val 100pF kondi (saját terv egy gyári rajz alapján). 12V ról ment 0,5-1A limittel melegedés nélkül. Tokon kívül voltak védődiódák. A hiba menet közbe jelentkezett, egyszerűen megugrott az áram és letiltott a táp 3A nál. Mint kiderült az ic egyik fele lett zárlatos + táp irányba a motorra menő egyik kivezetés.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 január 17, 16:50
Írta: s7manbs8 Dátum 2014 január 17, 16:50
És ezután még egy panelt nem építettél, az is elszállt ?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 január 17, 16:50
Írta: s7manbs8 Dátum 2014 január 17, 16:50
Nem gerjedt a paneled ? Valami nem jó lehet rajta ...
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2014 január 17, 18:19
Írta: besirkyjh Dátum 2014 január 17, 18:19
Szia
Neke gyanus hogy kevés a 12 volt táp .
A 100pf hol volt ? párhuzamosan a bemenetekkel ?
Sajnos ez tipikusnak mondhato pl rosz nyák topoligia vagy helytelen LPT illesztéseknél ( földhurok pl ) .
A nyákrol egy fotot feltennél ?
Már vagy 3 és fél marékot ellöttem én is de most sinen vagyok vele :) Az biztos hogy a lehetö legkisebbre és a lehetö legkevesebb alkatrésszel kel összerakni .Nekem nincs vele bajom ebben az árban szerintem jo .
Egyébbként már megépitett panel van 2000ft alatt is ebböl a tipusbol ( szintén Ebay) .
Neke gyanus hogy kevés a 12 volt táp .
A 100pf hol volt ? párhuzamosan a bemenetekkel ?
Sajnos ez tipikusnak mondhato pl rosz nyák topoligia vagy helytelen LPT illesztéseknél ( földhurok pl ) .
A nyákrol egy fotot feltennél ?
Már vagy 3 és fél marékot ellöttem én is de most sinen vagyok vele :) Az biztos hogy a lehetö legkisebbre és a lehetö legkevesebb alkatrésszel kel összerakni .Nekem nincs vele bajom ebben az árban szerintem jo .
Egyébbként már megépitett panel van 2000ft alatt is ebböl a tipusbol ( szintén Ebay) .
Cím: Re:Léptetőmotor
Írta: Thowra Dátum 2014 január 17, 20:52
Írta: Thowra Dátum 2014 január 17, 20:52
Ez volt a prototípus, hogy lássam mit tud az is mielőtt veszek egy gyári panelt. Gondoltam a forgatónak jó lesz a panel.
Cím: Re:Léptetőmotor
Írta: Thowra Dátum 2014 január 17, 21:12
Írta: Thowra Dátum 2014 január 17, 21:12
Cím: Re:Léptetőmotor
Írta: Thowra Dátum 2014 január 17, 21:36
Írta: Thowra Dátum 2014 január 17, 21:36
Nézelődtem ebayen és találtam többet ami tetszene de azt írják, hogy az árba nincs benne a vám, adó nem tudom az mennyi lehet :S.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 január 17, 21:50
Írta: 000000000 Dátum 2014 január 17, 21:50
Sziasztok!
Tudnátok nekem olyan helyet mondani ahol megtudom oldani okosba a léptetőmotor beszerzését, nem tudom hogy CNC-n kívül mely gépekben van ilyen motor.
És még 1 kérdésem van: ha gyenge léptetőmotort használok 80mNm forgatónyomatékkal de cserébe nagyon kis marófejet rakok fel és fába marok + úgy programoznám hogy (nagyon) lassan mozogjon X;Y tengelyen akkor az jó megoldás ?
hasonló kaliberű motorra gondoltam mint ez: ez
Tudnátok nekem olyan helyet mondani ahol megtudom oldani okosba a léptetőmotor beszerzését, nem tudom hogy CNC-n kívül mely gépekben van ilyen motor.
És még 1 kérdésem van: ha gyenge léptetőmotort használok 80mNm forgatónyomatékkal de cserébe nagyon kis marófejet rakok fel és fába marok + úgy programoznám hogy (nagyon) lassan mozogjon X;Y tengelyen akkor az jó megoldás ?
hasonló kaliberű motorra gondoltam mint ez: ez
Cím: Re:Léptetőmotor
Írta: a86ifm7g5 Dátum 2014 január 17, 22:11
Írta: a86ifm7g5 Dátum 2014 január 17, 22:11
Ez gyakorlatilag 0,08N-os motor. Ezzel szerintem ne akarj marni semmit. Illetve tengelyeket mozgatni sem, ez nagyon kis teljesítmény. Ezzel max tükröt lehet forgatni. Még egy Epson FX1050-es nyomtatóban is nagyobb motor van. Egyébként még az is kevés CNC-hez. Klaviónál nézz körbe, sokkal jobb árat találsz.
Cím: Re:Léptetőmotor
Írta: robokacsa Dátum 2014 január 17, 22:38
Írta: robokacsa Dátum 2014 január 17, 22:38
ennyi pénzért itt a fórumon nagyon jó mocikat tudsz beszerezni.
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2014 január 17, 23:27
Írta: jani300 Dátum 2014 január 17, 23:27
Nem akarok tolakodni ,de ennél még nekem is vannak jobb léptetőim . TYPE 17PM-K405-02V ,24V , 1,5 A , 1,8 deg . Ebből van 3db . 1500 ft ért szívesen neked adom a 3db-ot . Ezek unipolárisak . De vannak hasonló nema 23 asok o,5 nM körüliek is . Próbálgatni vettem ,de még nem forgott nálam léptető ,lassan talán belevágok :)
Cím: Re:Léptetőmotor
Írta: robokacsa Dátum 2014 január 17, 23:59
Írta: robokacsa Dátum 2014 január 17, 23:59
lonewolf kínálatában nézz körül, dioda.hu, szerintem korrekt mocikat árul, nekem is van pár db tőle.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2014 január 18, 05:57
Írta: besirkyjh Dátum 2014 január 18, 05:57
Szia
Tetszik a nyákod :) ( nosztalgiáztam kicsit rajta ) .Ha épiteni akarsz ilyen vezérlöt akkor inkább kérj egy bevált nyáktervet , ne kísérletez vele mert sokba kerül .Inkább a 330pf lenne optimális az oszcillátorhoz.
Szerintem ez még " becsuszik" vám és áfa nélkül .Ha nem akkor 27% ÁFA és erre 4% VÁM kerülne , nem olyan tétel hogy ne érné meg .
Lehet még jobban jársz ha komplett 3 vagy 4 csatornás vezérlöt veszel , bár nem tudom mire szeretnéd használni .
Tetszik a nyákod :) ( nosztalgiáztam kicsit rajta ) .Ha épiteni akarsz ilyen vezérlöt akkor inkább kérj egy bevált nyáktervet , ne kísérletez vele mert sokba kerül .Inkább a 330pf lenne optimális az oszcillátorhoz.
Szerintem ez még " becsuszik" vám és áfa nélkül .Ha nem akkor 27% ÁFA és erre 4% VÁM kerülne , nem olyan tétel hogy ne érné meg .
Lehet még jobban jársz ha komplett 3 vagy 4 csatornás vezérlöt veszel , bár nem tudom mire szeretnéd használni .
Cím: Re:Léptetőmotor
Írta: Thowra Dátum 2014 január 18, 16:13
Írta: Thowra Dátum 2014 január 18, 16:13
Ez a panel prototípus volt, ki akartam próbálni az ic t. A géphez van egy kínai 3 tengelyes kék panelem, az kergeti a 3 nyomtatóból bontott nema 17 es motort. Szeretnék építeni egy forgatót a géphez, ahhoz kellene a vezérlő. Rendeltettem 2 db ot az ebayes olcsóbból így marad tartalék is.
vezerlo
vezerlo
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 január 22, 00:34
Írta: s7manbs8 Dátum 2014 január 22, 00:34
Tavaly valamikor kérdeztem én, hogy lenne e valakinek erősebb, 1Nm vagy feletti kicsivel léptetőmotorja próbára kölcsönbe, mintha valaki Debrecenből lett volna, meg hogy jön erre, aztán nem jött, közben lenne valaki ismerősöm, aki Debrecenben van és érte tudna menni, ha meglenne még.
Néztem ezt a Sonceboz féle lonewolf motort is, ha valakinek lenne ilyen Debreceni pl. hogy meg tudnám a gépemmel tesztelni, hogy elég lenne e neki Nema23 méretűek érdekelnének, meg lenne nagyobb amperes unipoláris meghajtó vezérlőm azt is megtesztelni. Jelentkezni itt is, vagy email címemen is lehet, köszönöm.
Néztem ezt a Sonceboz féle lonewolf motort is, ha valakinek lenne ilyen Debreceni pl. hogy meg tudnám a gépemmel tesztelni, hogy elég lenne e neki Nema23 méretűek érdekelnének, meg lenne nagyobb amperes unipoláris meghajtó vezérlőm azt is megtesztelni. Jelentkezni itt is, vagy email címemen is lehet, köszönöm.
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2014 január 22, 05:33
Írta: c2nsu773m Dátum 2014 január 22, 05:33
1500ft/db áron tudok adni 1N-os motort.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2014 január 22, 08:01
Írta: besirkyjh Dátum 2014 január 22, 08:01
Szia
Nem én voltam de ha küldesz egy telefonszámot email-ben akkor délután valamikor felhivlak és találunk valamit ( ha kölcsön is jo ) !
Nem én voltam de ha küldesz egy telefonszámot email-ben akkor délután valamikor felhivlak és találunk valamit ( ha kölcsön is jo ) !
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 január 22, 14:17
Írta: s7manbs8 Dátum 2014 január 22, 14:17
Kép van róla, illetve milyen fajta lenne ?
Cím: Re:Léptetőmotor
Írta: Devecz Miklós Dátum 2014 január 22, 15:16
Írta: Devecz Miklós Dátum 2014 január 22, 15:16
Sziasztok,
Nyolcvezetékes motor négyvezetékesre való átkötésénél mi a különbség a soros és a párhuzamos bekötésnél?
Az előnye-hátránya érdekelne.
Nyolcvezetékes motor négyvezetékesre való átkötésénél mi a különbség a soros és a párhuzamos bekötésnél?
Az előnye-hátránya érdekelne.
Cím: Re:Léptetőmotor
Írta: Pali79 Dátum 2014 január 22, 15:37
Írta: Pali79 Dátum 2014 január 22, 15:37
A tekercsek soros összekötése miatt a hajtás által szolgáltatott maximum áram csak a fele lehet a motor névleges fázisáramának, a motor névleges nyomatékkal működik, viszont a maximális léptetési frekvencia jelentősen csökken.
A két tekercs soros kapcsolása miatt, a névleges gerjesztést már a névleges fázisáram fele létrehozza. A maximális léptetési frekvencia – a soros kapcsolásból eredendően – a kétszeresre nőtt induktivitás és a szintén kétszeresre nőtt ellenállás miatt csökken számottevően.
Párhuzamos kötésnél a hajtás által szolgáltatott maximális áram a névleges fázisárammal egyenlő, a motor nyomatéka nem változik, viszont a maximális léptetési frekvencia jelentősen megnő, továbbá nagyobb fordulatszámok esetén is nagyobb lesz a motor nyomatéktartaléka.
A fent elmondottak miatt a nyolc kivezetéses motoroknak párhuzamos bekötését ajánljuk.
Idézet Sir-Nyeteg tollából. Sem megerősíteni, sem cáfolni nem tudom.
A két tekercs soros kapcsolása miatt, a névleges gerjesztést már a névleges fázisáram fele létrehozza. A maximális léptetési frekvencia – a soros kapcsolásból eredendően – a kétszeresre nőtt induktivitás és a szintén kétszeresre nőtt ellenállás miatt csökken számottevően.
Párhuzamos kötésnél a hajtás által szolgáltatott maximális áram a névleges fázisárammal egyenlő, a motor nyomatéka nem változik, viszont a maximális léptetési frekvencia jelentősen megnő, továbbá nagyobb fordulatszámok esetén is nagyobb lesz a motor nyomatéktartaléka.
A fent elmondottak miatt a nyolc kivezetéses motoroknak párhuzamos bekötését ajánljuk.
Idézet Sir-Nyeteg tollából. Sem megerősíteni, sem cáfolni nem tudom.
Cím: Re:Léptetőmotor
Írta: Devecz Miklós Dátum 2014 január 22, 15:56
Írta: Devecz Miklós Dátum 2014 január 22, 15:56
Teljesen belekeveredtem.
A vezérlőn beállítandó motoráram zavart be.
Az alábbi link szerint:
Adatlap
Most mennyi áramot kell beállítani párhuzamos bekötésnél?
A vezérlőn beállítandó motoráram zavart be.
Az alábbi link szerint:
Adatlap
Most mennyi áramot kell beállítani párhuzamos bekötésnél?
Cím: Re:Léptetőmotor
Írta: Pali79 Dátum 2014 január 22, 16:07
Írta: Pali79 Dátum 2014 január 22, 16:07
Szerintem 3A. Próbáld ki, ha nagyon melegszik a motor akkor vedd vissza egy kicsit.
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2014 január 22, 21:31
Írta: c2nsu773m Dátum 2014 január 22, 21:31
6 vezetékesek , általában 1N, NEMA 23 , a tengely mérete 6,35 ha jol tudom....
1500/db
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2014 január 22, 21:34
Írta: c2nsu773m Dátum 2014 január 22, 21:34
A 3-4-5 képen lévő motorhoz nincs csatlakozóm, viszont a lent említett 8 tekercses csoportba tartozik és már sikeresen átkötöttünk párat, sokkal erősebbek lettek!
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2014 január 22, 22:19
Írta: istvan58 Dátum 2014 január 22, 22:19
Hali,
Van két Astrosyn Minebea leptetőm,
23LM-C718-01 es 23LM-C375-02
Sehol nem találom az adatait. Valaki esetleg?
Van két Astrosyn Minebea leptetőm,
23LM-C718-01 es 23LM-C375-02
Sehol nem találom az adatait. Valaki esetleg?
Cím: Re:Léptetőmotor
Írta: Benel Dátum 2014 január 23, 07:54
Írta: Benel Dátum 2014 január 23, 07:54
Szia!
Érdeklődöm van a KH56LM2-049-ből 3db, vagy a C7628-9212K-ból 3db?
Valami adatlap ?
Érdeklődöm van a KH56LM2-049-ből 3db, vagy a C7628-9212K-ból 3db?
Valami adatlap ?
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2014 január 23, 20:36
Írta: c2nsu773m Dátum 2014 január 23, 20:36
mindegyikből van 3db még. több is....
Adatlap: ------ :)
Adatlap: ------ :)
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2014 január 23, 21:53
Írta: PSoft Dátum 2014 január 23, 21:53
A kis VEXTA NEMA17-esek is sikeresen átköthetőek nyolc kivezetésesre.
Meg is történt.:))
A képeken,még az eredeti,hat kivezetéses állapot.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 január 23, 22:22
Írta: 000000000 Dátum 2014 január 23, 22:22
Az én gépemen 4 kivezetésesre van átkötve.
Tökéletes.
Tökéletes.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 január 23, 23:29
Írta: 000000000 Dátum 2014 január 23, 23:29
Üdvözlet Urak!
Léptető motor vezérlőhöz (RTA GMH06) kutatok tápegység után. 55-85 V DC, 6 Amper
Ilyen paraméterekkel rendelkező tápegység nincs eladó valakinek. Esetleg 2-3 db is érdekelne.
Köszönet!
Léptető motor vezérlőhöz (RTA GMH06) kutatok tápegység után. 55-85 V DC, 6 Amper
Ilyen paraméterekkel rendelkező tápegység nincs eladó valakinek. Esetleg 2-3 db is érdekelne.
Köszönet!
Cím: Re:Léptetőmotor
Írta: robokacsa Dátum 2014 január 25, 18:36
Írta: robokacsa Dátum 2014 január 25, 18:36
lézeres fórumban szóbakerült, hogy vinnyognak?? a motorok. én gépeimben a klavió által is forgalmazott MSD 5.6 60 valami ilyesmi típusú léptecsvezérlőket használom. a marógépemen nagyobb motorok vannak, 2-3-4 Nm es-ek, ott nem lehet megfigyelni azt a bizonyos vinnyogást, de lézeres gépemen kb 1-0.7 N os mocik lehetnek, de ott hallható ez a kissé zavaró hang, de ott miért????
az a baj, hogy vinnyogós motorokon semmiféle típus nem beazonosítható, volt 8 vezeték, abból kisilabizáltam, melyikkel működik. próbáltam kizárni a hibás bekötést, direkt rosszul bekötve, de akkor el sem indul, egy esetben megy, de akkor meg sipol......
az esetleg előfordulhat, hogy valamiféle speckó stepper, mert enkóderek vannak a tengelyek végein, amit persze az msd vezérlő nem kezel.
ez lehet a baj forrása??
az a baj, hogy vinnyogós motorokon semmiféle típus nem beazonosítható, volt 8 vezeték, abból kisilabizáltam, melyikkel működik. próbáltam kizárni a hibás bekötést, direkt rosszul bekötve, de akkor el sem indul, egy esetben megy, de akkor meg sipol......
az esetleg előfordulhat, hogy valamiféle speckó stepper, mert enkóderek vannak a tengelyek végein, amit persze az msd vezérlő nem kezel.
ez lehet a baj forrása??
Cím: Re:Léptetőmotor
Írta: izbeki Dátum 2014 január 30, 10:22
Írta: izbeki Dátum 2014 január 30, 10:22
Sziasztok!
Ha valaki esetleg bele akar mélyedni a léptetőmotorok lelki világába, ajánlom figyelmébe az adok-veszek rovat két bejegyzését:
#69514 és #69596
Szép napot mindenkinek!
Ha valaki esetleg bele akar mélyedni a léptetőmotorok lelki világába, ajánlom figyelmébe az adok-veszek rovat két bejegyzését:
#69514 és #69596
Szép napot mindenkinek!
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2014 január 30, 12:12
Írta: 4umhue7vh Dátum 2014 január 30, 12:12
Üdv!
Van valakinek ötlete, hogy honnan tudnék leírást szerezni erről a léptetőmotor vezérlőről? Sanyo Denki RBB2CT402

Van valakinek ötlete, hogy honnan tudnék leírást szerezni erről a léptetőmotor vezérlőről? Sanyo Denki RBB2CT402
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2014 január 30, 12:13
Írta: 4umhue7vh Dátum 2014 január 30, 12:13
http://www.tortlex2.com/ebay7.php?image=plc6737.jpg
Cím: Re:Léptetőmotor
Írta: vcxdia6f Dátum 2014 január 30, 12:57
Írta: vcxdia6f Dátum 2014 január 30, 12:57
Szia, a C6360-ból kérek 2darabot.
Cím: Re:Léptetőmotor
Írta: xfg6v697j Dátum 2014 január 30, 14:49
Írta: xfg6v697j Dátum 2014 január 30, 14:49
Ennek oka valószínűleg,csak a motor forgórészének a tömege.
A kissebb tömegű tudja követnia vezérlő által kiadott pwm frekit,a nagyobb tömegű pedig nem.
Így az mint egy hangszóró halhatóvá teszi.
A kissebb tömegű tudja követnia vezérlő által kiadott pwm frekit,a nagyobb tömegű pedig nem.
Így az mint egy hangszóró halhatóvá teszi.
Cím: Re:Léptetőmotor
Írta: a5p8dazn7 Dátum 2014 január 30, 22:03
Írta: a5p8dazn7 Dátum 2014 január 30, 22:03
Üdv!
KH56LM2-049-ből 3db-ot kérek.
Üzenek!
KH56LM2-049-ből 3db-ot kérek.
Üzenek!
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2014 január 31, 20:56
Írta: c2nsu773m Dátum 2014 január 31, 20:56
C7628-9212 elfogyott!
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2014 január 31, 20:57
Írta: c2nsu773m Dátum 2014 január 31, 20:57
Holnap megnézem hogy van-e még belőle.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 február 04, 09:25
Írta: 000000000 Dátum 2014 február 04, 09:25
Üdvözlöm!
A C6360-9212-ből lenne e 2 db és személyesen át lehetne e venni szerdán délután M7-M0-M5 útvonalon?
A C6360-9212-ből lenne e 2 db és személyesen át lehetne e venni szerdán délután M7-M0-M5 útvonalon?
Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2014 február 04, 15:10
Írta: Gyárfás Attila Dátum 2014 február 04, 15:10
Üdv Egy kis segitség kellene,mivel léptető motorokkal még nem volt dolgom.viszont egy projektemhez erre gondoltam. Nagyvonalakban a lényeg. Az R2D2 fejforgatásához kellene. 12V os a rendsze. Egy kisebb léptetőmotorra gondoltam,hozzá egy olyan kis elektronika,amin egy potméterrel lehetne váltani a forgásirányt és a sebességet.Mivel minden táviránitással működik,ezért a potit egy modell servo mozgatná. Középállásban nincs mozgás,jobbra-balra pedig a forgásirány lenne. Léptetőmotor egy cnc ből kibontott moci lenne,pontos adatot nemsokára rakok föl. Megoldható ez a terv,esetleg lenne valakinek hozzá nyákterve,vagy ötlete. Előre is köszi.
Cím: Re:Léptetőmotor
Írta: gorbi Dátum 2014 február 04, 17:55
Írta: gorbi Dátum 2014 február 04, 17:55
Szerintem az Arduino paneleit kéne körbenézned, elég egyszerű programozni. Lehet hozzá kapni rátét paneleket shild-nek nevezik ezeket, olyanokat is amik akár több léptetőmotort lekezelnek.
pl.: robotok
pl.: robotok
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 február 04, 20:10
Írta: s7manbs8 Dátum 2014 február 04, 20:10
Meg lehet oldani persze, mutasd meg mit óhajtol ás összehozzuk.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2014 február 04, 21:24
Írta: besirkyjh Dátum 2014 február 04, 21:24
Szia
Meg kaptad már a csomagot ? :)
Meg kaptad már a csomagot ? :)
Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2014 február 04, 21:51
Írta: Gyárfás Attila Dátum 2014 február 04, 21:51
A motor egy Dynasyn 2shg-055a56s, 5.5v, 8.5ohm, 1/8step, bipolaris. Ehhez kellene egy előzőekben leirt áramkör. A poti helyett,talán egy 2állásu kapcsoló is elég lenne, a forgásirány váltani. Ezt a kapcsolót is tudnám servoval mozgatni,kapcsolgatni. A potis verzió azért lenne jobb mert a sebességet is lehetne állitani. Ha lehetséges.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 február 04, 21:57
Írta: s7manbs8 Dátum 2014 február 04, 21:57
Szia , jajj még az sem ért ide hallod, de ma pont azt mondta, hogy szombaton jön elvileg, remélem még nem kell vissza küldenem, azért nem is írtam, mert még ide sem ért. :)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 február 04, 21:59
Írta: s7manbs8 Dátum 2014 február 04, 21:59
Meg lehet azt procival is meg anélkül is oldani valahogy ha a poti által meghatározott sebességgel impulzusokat adna ki léptetné a cuccot.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 február 04, 23:56
Írta: 000000000 Dátum 2014 február 04, 23:56
kiindulási alapnak
Esetleg jó lehet.
Valahol van leírás arról is, hogy hogyan lehet rákötni bipoláris motort, csak most nem akad a kezem ügyébe.
Esetleg jó lehet.
Valahol van leírás arról is, hogy hogyan lehet rákötni bipoláris motort, csak most nem akad a kezem ügyébe.
Cím: Re:Léptetőmotor
Írta: pbalazs Dátum 2014 február 05, 00:08
Írta: pbalazs Dátum 2014 február 05, 00:08
Meg lehet oldani.
Én anno csináltam hasonlót, de már rég szétszedtem, doksi persze nincs róla...
Ha jól emlékszem, sztereo potival oldottam meg: az egyik része feszosztónak volt bekötve, és pár komparátor figyelte, hogy a középső (tiltott) sávban van-e (motor állj), vagy abból kimozdult jobbra, vagy balra (motor engedélyezve).
A poti másik része pedig egy RC-oszcillátorra ment úgy, hogy a középső láb mindig rá volt kötve, a két szélső közül pedig egy analóg kapcsoló választott a forgásiránytól függően, azaz a szélső állásokban volt a leggyorsabb.
Remélem érthető volt.
De meg lehet mikrokontrollerrel is oldani, csak akkor még nem tudtam, hogy van ilyen :)
Így csináltam erősítőt kb. 40 TTL IC-ből, de az egy másik történet...
Én anno csináltam hasonlót, de már rég szétszedtem, doksi persze nincs róla...
Ha jól emlékszem, sztereo potival oldottam meg: az egyik része feszosztónak volt bekötve, és pár komparátor figyelte, hogy a középső (tiltott) sávban van-e (motor állj), vagy abból kimozdult jobbra, vagy balra (motor engedélyezve).
A poti másik része pedig egy RC-oszcillátorra ment úgy, hogy a középső láb mindig rá volt kötve, a két szélső közül pedig egy analóg kapcsoló választott a forgásiránytól függően, azaz a szélső állásokban volt a leggyorsabb.
Remélem érthető volt.
De meg lehet mikrokontrollerrel is oldani, csak akkor még nem tudtam, hogy van ilyen :)
Így csináltam erősítőt kb. 40 TTL IC-ből, de az egy másik történet...
Cím: Re:Léptetőmotor
Írta: jv7pu3a5p Dátum 2014 február 05, 08:06
Írta: jv7pu3a5p Dátum 2014 február 05, 08:06
Ez így elég bonyinak tűnik.
Én a helyedben a vevőből kijövő PWM jelet küldeném egy mikrokontrolleren át egy léptetőmotor vezérlőnek, pl amit Sir-nyeteg is árul.
Jóval egyszerűbb a dolog. Így egy karral vagy tekerővel a távon tudod állítani a sebességet és az irányt is.
De tudod mit ha akarod megcsinálom neked (én is nagy Star Wars fan vagyok...), feltétele, hogy egy CNC talira el kell hozd a D2-est. :))
Én a helyedben a vevőből kijövő PWM jelet küldeném egy mikrokontrolleren át egy léptetőmotor vezérlőnek, pl amit Sir-nyeteg is árul.
Jóval egyszerűbb a dolog. Így egy karral vagy tekerővel a távon tudod állítani a sebességet és az irányt is.
De tudod mit ha akarod megcsinálom neked (én is nagy Star Wars fan vagyok...), feltétele, hogy egy CNC talira el kell hozd a D2-est. :))
Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2014 február 05, 11:44
Írta: Gyárfás Attila Dátum 2014 február 05, 11:44
Szia
Köszi a segítséged, küldök is mailt.
Viszont egy cimbinek most készült el. Pécsen a Kikaban lesz a bemutatója most a szombati farsangon.
R2
Köszi a segítséged, küldök is mailt.
Viszont egy cimbinek most készült el. Pécsen a Kikaban lesz a bemutatója most a szombati farsangon.
R2
Cím: Re:Léptetőmotor
Írta: Kelepeisz Lajos Dátum 2014 február 09, 13:02
Írta: Kelepeisz Lajos Dátum 2014 február 09, 13:02
Tiszteletem uraim!
Kezdő vagyok a témába, és a célból regisztráltam ide, hogy hátha válaszokat kapok a kérdéseimre.
Van egy dolog amit nem értek, pl: egy léptetőmotor 3v tekercseit nagy feszültség rákapcsolásával tudjuk használni,ha jól tudom azért kell a nagy feszültség hogy minél gyorsabban reagáljon a motor, amit az elektronika szabályoz, és áramot korlátoz, de amire nem nagyon kaptam sehol választ, az az hogy miképpen kell megválasztani a tápegység feszültségét, és teljesítményét.
Ha valaki írna egy kis magyarázatot, annak nagyon hálás lennék.
Kezdő vagyok a témába, és a célból regisztráltam ide, hogy hátha válaszokat kapok a kérdéseimre.
Van egy dolog amit nem értek, pl: egy léptetőmotor 3v tekercseit nagy feszültség rákapcsolásával tudjuk használni,ha jól tudom azért kell a nagy feszültség hogy minél gyorsabban reagáljon a motor, amit az elektronika szabályoz, és áramot korlátoz, de amire nem nagyon kaptam sehol választ, az az hogy miképpen kell megválasztani a tápegység feszültségét, és teljesítményét.
Ha valaki írna egy kis magyarázatot, annak nagyon hálás lennék.
Cím: Re:Léptetőmotor
Írta: k9sgfk0dg Dátum 2014 február 09, 15:16
Írta: k9sgfk0dg Dátum 2014 február 09, 15:16
Szia!
Küldtem mailt a 7db. motor rendelés végett, és gondolom már megérkezett az utalásom is, ezért légy szíves válaszolj.
Köszönöm.
Küldtem mailt a 7db. motor rendelés végett, és gondolom már megérkezett az utalásom is, ezért légy szíves válaszolj.
Köszönöm.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 február 11, 01:10
Írta: s7manbs8 Dátum 2014 február 11, 01:10
Megteszteltem egy Sonceboz 6600R045 motort 4.7 A/phase bipolar. Vezérlő HY-DIV268N-5A 5A állásban.
Ez erősebb, mint ami most volt motorom a gépen, de annyira nem vagyok tőle elájulva, még csak asztalon néztem meg.
A kisebbik verzió meg 2.1A/phase 6600R034 tipus, de ez nem látszik erősebbnek első vizsgálatra, mint a Török Tamás féle motorok, persze most 30V tápot kapott, lehet még többel még jobban menne, más vezérlővel a sebesség szempontját ha nézzük, még van benne tartalék, de a Tamás félében is ha azt is magasabbról járatnám.
Viszont az az erősebb azért lehet jobban teljesítene a gépemen, holnap megnézem a tengelyre szerelve úgy mennyit bír a gyengébbhez képest.
Az biztos, ha fürgeséget szeretnénk, akkor a tápfesz nem árt, ha minél magasabb ez egyértelmű, de nyilván nem újdonság senkinek.
Ez erősebb, mint ami most volt motorom a gépen, de annyira nem vagyok tőle elájulva, még csak asztalon néztem meg.
A kisebbik verzió meg 2.1A/phase 6600R034 tipus, de ez nem látszik erősebbnek első vizsgálatra, mint a Török Tamás féle motorok, persze most 30V tápot kapott, lehet még többel még jobban menne, más vezérlővel a sebesség szempontját ha nézzük, még van benne tartalék, de a Tamás félében is ha azt is magasabbról járatnám.
Viszont az az erősebb azért lehet jobban teljesítene a gépemen, holnap megnézem a tengelyre szerelve úgy mennyit bír a gyengébbhez képest.
Az biztos, ha fürgeséget szeretnénk, akkor a tápfesz nem árt, ha minél magasabb ez egyértelmű, de nyilván nem újdonság senkinek.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 február 11, 01:20
Írta: s7manbs8 Dátum 2014 február 11, 01:20
1000-es fordulattal járatva 30V-on 1A-t fogyaszt kb. Csak táp méretezéshez ez ad támpontot valakinek, aki nem tudja.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 február 11, 01:22
Írta: s7manbs8 Dátum 2014 február 11, 01:22
Még annyit észleltem, hogy a Vezérlő HY-DIV268N-5A, a feliratok nem jól vannak a mikrolépést tekintetében, nem jó a táblázat .... az 1/4 állás a leggyorsabb mozgású, a nem tudom melyik meg a leglassabb !!
Cím: Re:Léptetőmotor
Írta: Sz.József Dátum 2014 február 11, 07:45
Írta: Sz.József Dátum 2014 február 11, 07:45
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 február 11, 13:45
Írta: s7manbs8 Dátum 2014 február 11, 13:45
Ja, azt láttam is , hogy valaki pont ezt a vezérlőt kérdezte tegnap ránézek én is mit írtál ott. :)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 február 11, 13:49
Írta: s7manbs8 Dátum 2014 február 11, 13:49
Úgy látom egyezik a tapasztalatunk, az áramértékek is kevesebbek tényleg, mint ami a táblázaton van, mert maximumon is gyengének tűnt ez a 4.7A-es motor, akkor már értem így, hogy miért nem akart langyosodni se szinte, még 1A kellett volna a motornak. ú
Na most az érzékelő ellenállás, ha jól látom 0.22Ohm-os, akkor oda lehet tenni 0.15Ohmot kb. akkor lesz reális, ha az IC bírja egyáltalán azt a majdnem 5A-t ???
Na most az érzékelő ellenállás, ha jól látom 0.22Ohm-os, akkor oda lehet tenni 0.15Ohmot kb. akkor lesz reális, ha az IC bírja egyáltalán azt a majdnem 5A-t ???
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 február 11, 13:50
Írta: s7manbs8 Dátum 2014 február 11, 13:50
A mikrolépés táblázat meg Matolcsyszemű.
Cím: Re:Léptetőmotor
Írta: Sz.József Dátum 2014 február 11, 14:28
Írta: Sz.József Dátum 2014 február 11, 14:28
Az ellenállás csere nem tudom megoldás lenne-e, hogy meglegyen az 5A.
Ezzel nem próbálkoztam...
Inkább betoltam a vezérlőt a fiók hátuljába... [#smile]
Ha viszont Te megpróbálkozol vele, szívesen venném a tapasztalatokat.
Ezzel nem próbálkoztam...
Inkább betoltam a vezérlőt a fiók hátuljába... [#smile]
Ha viszont Te megpróbálkozol vele, szívesen venném a tapasztalatokat.
Cím: Re:Léptetőmotor
Írta: Sz.József Dátum 2014 február 11, 14:30
Írta: Sz.József Dátum 2014 február 11, 14:30
[#nevetes1]
Na, ja...
Na, ja...
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 február 11, 16:48
Írta: s7manbs8 Dátum 2014 február 11, 16:48
Mivel az IC bemenete az ellenállást figyeli, ha kisebbet teszel, az több ampert fog engedni.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2014 február 11, 20:40
Írta: besirkyjh Dátum 2014 február 11, 20:40
Na,na :))
Csak ovatosan vele :)
Még a kinai is tudja hogy a Thosiba adatlap és a TB6600 nem ugyan az :) Ezért nem is merik jobban hajtani , de rajtunk kivül ugy sem méri senki ki ezeket :)
Csak ovatosan vele :)
Még a kinai is tudja hogy a Thosiba adatlap és a TB6600 nem ugyan az :) Ezért nem is merik jobban hajtani , de rajtunk kivül ugy sem méri senki ki ezeket :)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 február 11, 21:16
Írta: s7manbs8 Dátum 2014 február 11, 21:16
Ezt nem turbózom fel, csak ha az enyém lenne, akkor kijönne belőle 10A is ... :)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 február 11, 21:26
Írta: s7manbs8 Dátum 2014 február 11, 21:26
Viszont a mostani állapotában is, a kisebbik motornak is akkor adhatok a vezérlővel vagy 3.3A-t a vezérlő szerint, akkor lesz valójában 2.1A körül, és lehet elég erős lesz a gép hajtásra pl. kint meglátom majd ha kimegyek felszerelem.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2014 február 11, 22:02
Írta: besirkyjh Dátum 2014 február 11, 22:02
Látod mit jelent csak maga a szo hogy kinai :) ?
Észre sem vetted hogy Thosiba-t irtam ? ( Toshiba ).
Sokan ráfizettek már erre :))
Észre sem vetted hogy Thosiba-t irtam ? ( Toshiba ).
Sokan ráfizettek már erre :))
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 február 11, 22:16
Írta: s7manbs8 Dátum 2014 február 11, 22:16
Haha, pedig még Kazinczy érmem is van, de fel se tűnt, pedig tudom, hogy kell helyesen írni ezt. :)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 február 12, 01:06
Írta: s7manbs8 Dátum 2014 február 12, 01:06
A konfiguráció képben:

Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 február 12, 01:08
Írta: s7manbs8 Dátum 2014 február 12, 01:08
Asztali gép beépített LPT portjáról hajtom, közvetlenül, nincs meghajtó IC, se 5V feszültség, az optók negatív pontja GND-re téve a pozitív vége meg a kimenetet, Step, Dir, az Enablet meg rátettem a Y tengely Dir pinjére, így ha azon irányt váltok engedélyezhetem, vagy sem a vezérlőt.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 február 12, 07:45
Írta: 000000000 Dátum 2014 február 12, 07:45
Szervusz!
A KH56LM2-049-ből 3db-ot kérnék, ha még van belőle,köszönöm.
A KH56LM2-049-ből 3db-ot kérnék, ha még van belőle,köszönöm.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 február 21, 02:00
Írta: s7manbs8 Dátum 2014 február 21, 02:00
Most próbáltam tesztelni a gépre felrakva, de odáig nem jutottam el, mert nem akart működni semmi ...
A saját programommal meg s nyikkant a PSoft dobozos vezérlőm, ez a HY-DIV298 is egyik irányba megy, másikba nem, az én programommal. Aztán rájöttem, hogy alapból magas szint van az enyémben kiadva és az nem tetszik neki, meg a PSoft dobozosnak se, de azt hogy miért csak egyik irányba megy mindegy hogy a DIR jel alacsony vagy magas azt akkor se értem.
Mikor írtam régen ott az elektronikámban fázist váltott tranzisztorral azért lett olyan és azt nem is tudom opciókban állítani most. Holnap kiviszem a másik gépet, amin Mach3 meg Linuxot is meg tudom nézni, aztán ha megy, akkor jöhet ez a Piros Sonceboz motor is hogy az milyen lenne akkor, erre mindenképpen sor kerül holnap, most ezzel foglalkozok csak. Aztán ha megy méricskélek meg kép videó készül elvileg.
A saját programommal meg s nyikkant a PSoft dobozos vezérlőm, ez a HY-DIV298 is egyik irányba megy, másikba nem, az én programommal. Aztán rájöttem, hogy alapból magas szint van az enyémben kiadva és az nem tetszik neki, meg a PSoft dobozosnak se, de azt hogy miért csak egyik irányba megy mindegy hogy a DIR jel alacsony vagy magas azt akkor se értem.
Mikor írtam régen ott az elektronikámban fázist váltott tranzisztorral azért lett olyan és azt nem is tudom opciókban állítani most. Holnap kiviszem a másik gépet, amin Mach3 meg Linuxot is meg tudom nézni, aztán ha megy, akkor jöhet ez a Piros Sonceboz motor is hogy az milyen lenne akkor, erre mindenképpen sor kerül holnap, most ezzel foglalkozok csak. Aztán ha megy méricskélek meg kép videó készül elvileg.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 február 21, 02:03
Írta: s7manbs8 Dátum 2014 február 21, 02:03
Aztán a fogas szíjas kereket régen ahogy rátettem, szorosan ment egyik rá, másik meg papír lett közé dugva, de úgy látszik annyira rágyógyult, hogy nem tudom kézzel megforgatni a tengelyen ha az orsót megmarkolom és a kereket próbálnám elfordítani, hernyó csavar nélkül is igen erős így is, a motor meg ennyi erőt nem is tud kifejteni, de azért megpróbálom bele a menetet vágatni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 február 21, 08:29
Írta: 000000000 Dátum 2014 február 21, 08:29
Mach-ban van olyan lehetőség a kimenetek között, hogy Enabled.
Ezt állítod be az adott kimenetre akkor a reset gomb benyomásakor aktiválod vagy deaktiválod a vezérlőt.
Így a monitoron is láthatod mikor aktív.
Szerintem sokkal kulturáltabb lenne mint a mostani megoldás.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 február 22, 03:26
Írta: s7manbs8 Dátum 2014 február 22, 03:26
Sikerült tesztelni a motorokat is, a gépre is rátéve. A kisebbik SonceBoz is szépen viszi a nagy tengelyt, 1200-as fordulattal tud menni úgy néz ki stabilan, bár lehet kicsit inkább kevesebbet kell neki adni, de 1400-nál már leakad néha tehát látszik hogy az már sok.
A kisebbiket 3.3A-as beállításnál hajtja meg annyira, hogy melegszik valamennyire, de kézzel még bőven meg lehet fogni, kb. enniyt jelent neki a motor szerinti 2.1A igény.
Viszont a nagyobbnak 4.7A az igénye és azt nem tudja szolgáltatni ez a vezérlő, 5A állásnál is nem melegszik szinte semmit. ha a másikat nézem, akkor 6.5-7A lenne a neki való ha ezt a táblázatot nézem.
A Nagyobb motor se igen menne gyorsabban, bár lehet mégis, de így nem tudom kipróbálni, mert keveset kap erőt így.
A táp 34V, mikor álla motor, 32.7, mikor megy gyorsan, ez a táp jó neki úgy néz ki nem is túl sok a fesz, nem is kevés, csak jobb, mint 24V.
Viszont a PSoft féle dobozba rakott L1297 L1298 féle vezérlőből az egyik megint el kezdett rossz lenni, nehogy már működjön ... de a Z tengelyt ki tudtam azzal is próbálni a 6 kivezetéses motorommal, ami rajta van. Az egy kínai 4V 1.6A féle Olyan méretű, mint a kisebbik SonceBoz motor. Az eredmény az, hogy ezt is tudom hajtani 800-as fordulattal, és elég erősnek néz ki, mondhatni ez se rosszabb lehet, mint a SonceBoz féle. A táp viszont csak 24V abban a vezérlő dobozban, így annak a a számlájára írható szinte teljesen a kisebb fordulat 800, 1200 helyett, illetve a Z amúgy is felfele emeléskor nagyobb erőt kíván.
Viszont eddig ugyanez a motor unipolárisan ment, igaz csak vagy 18-20V-ról emiatt aztán eleve nem csoda ha jóval lassabban mehetett, nem csak az unipolárisa hajtás miatt, hanem a kicsi táp miatt, mert ilyenkor nagyobb induktivitás miatt arányosan nagyobb fesz is kéne neki, hogy hasonló teljesítményt nyújtson mint bipolárban hajtva. Egy jól megválasztott áttétellel, lassabban hajtva úgy is elég j lenne.
A nem jó tengelyvezérlő modult holnap megpróbálom megjavítani, nem tudom mitől nem lett jó, mi baja lehet, mert előtte még jó volt legutóbb, fél fázisa nincs meg neki, a kimeneti vezetékeknél lehet valami forrasztási hiba megint, mert eredetileg is azért volt rossz, de megcsináltam.
A következtetés mindenesetre úgy néz ki az, hogy a saját motorjaim is elegendőek a gépre, esetleg még jóval nagyobb feszültségről mehetne egy jó bipolár driverrel, ami mondjuk adna neki 50-60V-ot, akkor sebességben még fürgébb lehetne, mert az ereje amúgy elegendő.
Meg hét ugye szervó is van a világon, de itt az a lényeg, hogy vagy olcsó legyen még ha nem is a legfürgébb, de azért elviselhetően gyors, mert ha jobbat akarnék, akkor meg szervó lenne a jó választás, ami jóval nagyobb teljesítményt nyújthatna, persze akkor mélyen a zsebbe kellene nyúlni.
Holnap folytatom a mókát, meg kép, videó mérés is tervben van, ahogy az időben odáig elérek valahogy majd estefelére inkább.
Meg valamit vagdalni is kéne fürgén, mert úgy még nem láttam dolgozni, csak nagyon lassan.
A kisebbiket 3.3A-as beállításnál hajtja meg annyira, hogy melegszik valamennyire, de kézzel még bőven meg lehet fogni, kb. enniyt jelent neki a motor szerinti 2.1A igény.
Viszont a nagyobbnak 4.7A az igénye és azt nem tudja szolgáltatni ez a vezérlő, 5A állásnál is nem melegszik szinte semmit. ha a másikat nézem, akkor 6.5-7A lenne a neki való ha ezt a táblázatot nézem.
A Nagyobb motor se igen menne gyorsabban, bár lehet mégis, de így nem tudom kipróbálni, mert keveset kap erőt így.
A táp 34V, mikor álla motor, 32.7, mikor megy gyorsan, ez a táp jó neki úgy néz ki nem is túl sok a fesz, nem is kevés, csak jobb, mint 24V.
Viszont a PSoft féle dobozba rakott L1297 L1298 féle vezérlőből az egyik megint el kezdett rossz lenni, nehogy már működjön ... de a Z tengelyt ki tudtam azzal is próbálni a 6 kivezetéses motorommal, ami rajta van. Az egy kínai 4V 1.6A féle Olyan méretű, mint a kisebbik SonceBoz motor. Az eredmény az, hogy ezt is tudom hajtani 800-as fordulattal, és elég erősnek néz ki, mondhatni ez se rosszabb lehet, mint a SonceBoz féle. A táp viszont csak 24V abban a vezérlő dobozban, így annak a a számlájára írható szinte teljesen a kisebb fordulat 800, 1200 helyett, illetve a Z amúgy is felfele emeléskor nagyobb erőt kíván.
Viszont eddig ugyanez a motor unipolárisan ment, igaz csak vagy 18-20V-ról emiatt aztán eleve nem csoda ha jóval lassabban mehetett, nem csak az unipolárisa hajtás miatt, hanem a kicsi táp miatt, mert ilyenkor nagyobb induktivitás miatt arányosan nagyobb fesz is kéne neki, hogy hasonló teljesítményt nyújtson mint bipolárban hajtva. Egy jól megválasztott áttétellel, lassabban hajtva úgy is elég j lenne.
A nem jó tengelyvezérlő modult holnap megpróbálom megjavítani, nem tudom mitől nem lett jó, mi baja lehet, mert előtte még jó volt legutóbb, fél fázisa nincs meg neki, a kimeneti vezetékeknél lehet valami forrasztási hiba megint, mert eredetileg is azért volt rossz, de megcsináltam.
A következtetés mindenesetre úgy néz ki az, hogy a saját motorjaim is elegendőek a gépre, esetleg még jóval nagyobb feszültségről mehetne egy jó bipolár driverrel, ami mondjuk adna neki 50-60V-ot, akkor sebességben még fürgébb lehetne, mert az ereje amúgy elegendő.
Meg hét ugye szervó is van a világon, de itt az a lényeg, hogy vagy olcsó legyen még ha nem is a legfürgébb, de azért elviselhetően gyors, mert ha jobbat akarnék, akkor meg szervó lenne a jó választás, ami jóval nagyobb teljesítményt nyújthatna, persze akkor mélyen a zsebbe kellene nyúlni.
Holnap folytatom a mókát, meg kép, videó mérés is tervben van, ahogy az időben odáig elérek valahogy majd estefelére inkább.
Meg valamit vagdalni is kéne fürgén, mert úgy még nem láttam dolgozni, csak nagyon lassan.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 február 22, 22:40
Írta: s7manbs8 Dátum 2014 február 22, 22:40
Hangulatkép a motor tesztelésről:


Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 február 22, 23:52
Írta: s7manbs8 Dátum 2014 február 22, 23:52
A tegnapi problémám, hogy a vezérlő egyik motorja csak fele tekercs ment, most kiderült, hogy nem a vezérlő a hibás, hanem a motor vagy a motornál levő kábelek vagy szakadt, vagy nem tudom, vagy a motor olyan hogy nem menne bipolárisa, bár azt nem hinném, de érdekes, mindenesetre találtam egy másik olyan motort mint a többi így azt most beteszem és menni fog. Mindhárom tengelyt szeretném ezzel működtetni, teljesen beüzemelni, mert úgy néz ki elég lesz ez a fajta motorom egyelőre. Folytatom tovább ... Ez a nem menő motor 6V os féle most helyette egy 4V-ost teszek, az lehet többet is bír fordulatra emiatt remélem ugyanolyan erőre.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 február 23, 13:52
Írta: 000000000 Dátum 2014 február 23, 13:52
Üdv:
Kikapcsolódásként kérdezem, van még reményed a fuvart illetően?
Kikapcsolódásként kérdezem, van még reményed a fuvart illetően?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 február 23, 14:19
Írta: s7manbs8 Dátum 2014 február 23, 14:19
Üdv, van csak az illető megint halasztott, más meg még nem jött arról de rájuk is kérdezek megint, hogy mi a helyzet.
Cím: Re:Léptetőmotor
Írta: VighLajos Dátum 2014 február 23, 14:58
Írta: VighLajos Dátum 2014 február 23, 14:58
A marógép kapcsolójának rögzítése szenzációs!
[#nevetes1]
[#nevetes1]
Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2014 március 04, 18:01
Írta: Gyárfás Attila Dátum 2014 március 04, 18:01
Üdv
Van egy ilyen léptetőmocim:
Moci
Egy olyan kis vezérlő kellene hozzá,(12V-ról táphoz) amin lehet kapcsolni az irányt. Pl. egy egyszerű kapcsolóval.
Lenne valakinek ilyen?
Van egy ilyen léptetőmocim:
Moci
Egy olyan kis vezérlő kellene hozzá,(12V-ról táphoz) amin lehet kapcsolni az irányt. Pl. egy egyszerű kapcsolóval.
Lenne valakinek ilyen?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 március 04, 18:10
Írta: 000000000 Dátum 2014 március 04, 18:10
Minden léptető motor vezérlőnek van egy dir(irány) bemenete is. Oda beteszel egy kapcsolót, és kész.
Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2014 március 04, 18:55
Írta: Gyárfás Attila Dátum 2014 március 04, 18:55
És hol lehet venni ilyen vezérlőt?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 március 04, 19:33
Írta: 000000000 Dátum 2014 március 04, 19:33
Ez egy eléggé kis nyomatékú motor (nem tudom, mire használod majd, mivel adsz neki step jelet), de a 12 V ha nagyobb fordulatot is szeretnél, kevés lesz.
pl. Klavio webáruházában kapsz is mindenféle vezérlőt.
pl. Klavio webáruházában kapsz is mindenféle vezérlőt.
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2014 március 04, 20:00
Írta: Rabb Ferenc Dátum 2014 március 04, 20:00
Találtam a fiók alján egy Baji Elektronika féle unipoláris léptető vezérlőt és egy négyszöggenerátort. (gyufásdoboz méretű szerelt nyák lapok)
Pár alkatrészes cuccok, de ha csak ide-oda kell forgatni a motort, talán megfelel. Ha érdekel, holnap belegyűröm egy pufiborítékba.
Ja, és évekkel ezelőtt használtam utoljára léptető próbára, tehát a garancia már lejárt :))
Pár alkatrészes cuccok, de ha csak ide-oda kell forgatni a motort, talán megfelel. Ha érdekel, holnap belegyűröm egy pufiborítékba.
Ja, és évekkel ezelőtt használtam utoljára léptető próbára, tehát a garancia már lejárt :))
Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2014 március 04, 21:48
Írta: Gyárfás Attila Dátum 2014 március 04, 21:48
Itt a fórumon kaptam egy 250mm hosszú kis sines szerkezetet,amin ilyen moci van. Ezt egy kiemelő lesz,le és föl irányba mozogna végállásig.
Mennyiért adnád az elektronikát? De majd egy kis utmutatót a bekötésről jó lenne,mert a mocin sincs pl. Csati,csak 6 vezeték.
Mennyiért adnád az elektronikát? De majd egy kis utmutatót a bekötésről jó lenne,mert a mocin sincs pl. Csati,csak 6 vezeték.
Cím: Re:Léptetőmotor
Írta: Benel Dátum 2014 március 04, 22:18
Írta: Benel Dátum 2014 március 04, 22:18
Szerintem a célnak ez a kapcsolás megfelel:
http://bauhaus.ece.curtin.edu.au/~iain/CUB-Project/ELECTRONICS/74194%20Stepper%20Motor%20Driver.htm
http://bauhaus.ece.curtin.edu.au/~iain/CUB-Project/ELECTRONICS/74194%20Stepper%20Motor%20Driver.htm
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 március 04, 22:24
Írta: 000000000 Dátum 2014 március 04, 22:24
És ez még működőképes is, a neten fellelhető sok kapcsolással ellentétben ... [#wink]
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 március 04, 23:35
Írta: s7manbs8 Dátum 2014 március 04, 23:35
Ehhez van nyáktervem is ... amit megterveztem.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2014 március 04, 23:38
Írta: PSoft Dátum 2014 március 04, 23:38
No,akkor már teheted is a gépre az én példányomat!
[#eljen]
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 március 04, 23:44
Írta: s7manbs8 Dátum 2014 március 04, 23:44
Pont keresem, hogy hol is van ... :)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 március 04, 23:49
Írta: s7manbs8 Dátum 2014 március 04, 23:49
Ha erről van szó:


Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2014 március 05, 00:36
Írta: Gyárfás Attila Dátum 2014 március 05, 00:36
Nyákterve nézve pont jó lenne. Előre,hátra, meg poti a speed nek. Milyen tápról megy?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 március 05, 00:41
Írta: s7manbs8 Dátum 2014 március 05, 00:41
Szia ! 12V-ról megy pl. Minimum olyan 9V, maximum lehet több is a motortól függően 24V-is akár, ha olyan a motor mondjuk, ebben nincs áramkorlát, ha a motornak megfelelő feszről megy, akkor nem is kell semmi, ha meg esetleg több, akkor ellenállást lehet sorosan kötni esetleg a kimenetek és a motor kivezetések közé pl.
Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2014 március 05, 01:34
Írta: Gyárfás Attila Dátum 2014 március 05, 01:34
Vanelfekvőben esetleg egy ilyened?
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2014 március 05, 07:31
Írta: Rabb Ferenc Dátum 2014 március 05, 07:31
Ha a #4280 nekem szól, akkor a válaszom: ha ingyen elfogadod, állom a postát. A "vezérlő" rajzát megtaláltam, a generátorét nem. De a NYÁK-ok feliratozva vannak.
A működőképesség nem garantált, de egy próbát szerintem megér. Küldj egy postacímet, és holnap a kezedben a cucc.
A működőképesség nem garantált, de egy próbát szerintem megér. Küldj egy postacímet, és holnap a kezedben a cucc.
Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2014 március 05, 08:12
Írta: Gyárfás Attila Dátum 2014 március 05, 08:12
Szia
Neked szólt igen. Közben elektron mutatott egy komplett tervet, egyenlőre várom a válaszát. Ha aktuális mindenképp jelzem neked mailben.
Köszi
Neked szólt igen. Közben elektron mutatott egy komplett tervet, egyenlőre várom a válaszát. Ha aktuális mindenképp jelzem neked mailben.
Köszi
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 március 05, 08:26
Írta: 000000000 Dátum 2014 március 05, 08:26
Attila! Figyelj ide egy picit.
Írtad, hogy csak oda-vissza kell mozogni ~250 mm hosszon végálláskapcsolók között. Na de ennél az egyszerű feladatnál is tudnunk kellene, milyen max. sebességgel akarsz elmozdulni, ezt milyen motor áttétellel szeretnéd megoldani, mekkora erőt kell kifejteni a szerkezetnek. Ugyanis ha csak egy kapcsolóval váltasz irányt, és nincs lassulási, gyorsulási szakasz, akkor sajnos a motorod a korlátos start-stop frekvenciája miatt nem fog elindulni ilyen drasztikus, egységugrás sebessség jelekre. Azaz jó lenne, ha tehát leírnád azokat a sebesség, mechanika adatokat is, amire keresed az elektronikát, mert lehet, feleslegesen küldenek neked bármit is, az előbbiek miatt nem fog működni ilyen egyszerűen.
Írtad, hogy csak oda-vissza kell mozogni ~250 mm hosszon végálláskapcsolók között. Na de ennél az egyszerű feladatnál is tudnunk kellene, milyen max. sebességgel akarsz elmozdulni, ezt milyen motor áttétellel szeretnéd megoldani, mekkora erőt kell kifejteni a szerkezetnek. Ugyanis ha csak egy kapcsolóval váltasz irányt, és nincs lassulási, gyorsulási szakasz, akkor sajnos a motorod a korlátos start-stop frekvenciája miatt nem fog elindulni ilyen drasztikus, egységugrás sebessség jelekre. Azaz jó lenne, ha tehát leírnád azokat a sebesség, mechanika adatokat is, amire keresed az elektronikát, mert lehet, feleslegesen küldenek neked bármit is, az előbbiek miatt nem fog működni ilyen egyszerűen.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 március 05, 13:11
Írta: s7manbs8 Dátum 2014 március 05, 13:11
Olyat is lehetne csinálni, hogy a poti állásától függően középállásnál állna, erre arra tekerve pedig menne, és irányt váltana, mert ha a potit tekeri, akkor nem oylan nagyon gyorsul hirtelen, azt még le tudja követni, hacsak nem hirtelen egy pillanat alatt tekeri fel.
De egyszerűbb egy procit betenni és nem kell semmi, csak a végén az ULN meg a poti és programból meg van oldva ahogy tetszik. kisebb is a panel akkor.
De egyszerűbb egy procit betenni és nem kell semmi, csak a végén az ULN meg a poti és programból meg van oldva ahogy tetszik. kisebb is a panel akkor.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 március 05, 13:14
Írta: s7manbs8 Dátum 2014 március 05, 13:14
Olyanom is van ami lassulva gyorsulva irányt vált ha kell van ilyen megírt programom is elég sokáig kínlódtam vele mondjuk .. :) Megmondod neki a sebességet és az irányt és felveszi azt a tempót és irányt lassulva gyorsulva, ahogy a paramétere szerint szeretnéd.
Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2014 március 05, 13:52
Írta: Gyárfás Attila Dátum 2014 március 05, 13:52
Pár hete már volt erről szó. De több ilyen mechanika is kell. A sebessége kb. olyan mint a videon. Súlya kb. 35dkg. A potis megoldás még jobb lenne. Most készül egy léptetőmocis elektronika, de az RC távirányítással lesz kiegészítve.
VIDEO
Video2
VIDEO
Video2
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 március 05, 13:54
Írta: s7manbs8 Dátum 2014 március 05, 13:54
Lehet szólni kéne Vajnának, hogy forgassunk már valami Hungarian Star Wars filmet, lassan meglesznek hozzá az eszközök. :)
Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2014 március 05, 14:14
Írta: Gyárfás Attila Dátum 2014 március 05, 14:14
Jaja tényleg. Idén már szeretném ha elkészülne...Pont 2 éve kezdtem.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 március 05, 15:35
Írta: 000000000 Dátum 2014 március 05, 15:35
Sziasztok!
Röviden letudnátok írni hogy mire jó a pololu a4988 áramkör?
Röviden letudnátok írni hogy mire jó a pololu a4988 áramkör?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 március 05, 15:51
Írta: s7manbs8 Dátum 2014 március 05, 15:51
Bipoláris léptető motor hajtására, 2A-ig maximum.
Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2014 március 05, 16:09
Írta: Gyárfás Attila Dátum 2014 március 05, 16:09
Ment mail.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2014 március 08, 10:04
Írta: ANTAL GÁBOR Dátum 2014 március 08, 10:04
Nézegetem és egy helyen használom is a TB6560 as IC vel felépített léptetővezérlőt . Az adatlapján a mirolépéses üzemnél 2 PH , 1-2PH,
W1-2PH , 2W1-2PH jelölést használnak . Ha megnézem akkor egy fázis egy "szinusz " idejéhez 4,8,16,32 időegység tartozik . A megépített ( pl Sir Nyeteg féle de bármely kinai ) kapcsolások 1/1 ,1/2, 1/8, 1/16 os mikrolépéssel rendelkeznek ( a sorból hiányzik az 1/4 és a szisztematikusság is felborul ) Ki tudja ezt megmagyarázni nekem ?
W1-2PH , 2W1-2PH jelölést használnak . Ha megnézem akkor egy fázis egy "szinusz " idejéhez 4,8,16,32 időegység tartozik . A megépített ( pl Sir Nyeteg féle de bármely kinai ) kapcsolások 1/1 ,1/2, 1/8, 1/16 os mikrolépéssel rendelkeznek ( a sorból hiányzik az 1/4 és a szisztematikusság is felborul ) Ki tudja ezt megmagyarázni nekem ?
Cím: Re:Léptetőmotor
Írta: fektiforg Dátum 2014 március 08, 16:29
Írta: fektiforg Dátum 2014 március 08, 16:29
Szerintem úgy épül fel, mint a kettesszámrendszer
helyi értékei, ha ez volt a kérdés.
helyi értékei, ha ez volt a kérdés.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2014 március 08, 16:31
Írta: svejk Dátum 2014 március 08, 16:31
Nem tudom milyen adatlapot néztél de az enyémen 4, 8, 32, 64 órajelet ír a "szinusz" kirakásához.
Tehát ahogy a valóságban is van az 1/4 lépés hiányzik.
Ezt a kérdést anno a az Allegro IC kapcsán is feltettem, de nem tudtuk meg a választ.
Tehát ahogy a valóságban is van az 1/4 lépés hiányzik.
Ezt a kérdést anno a az Allegro IC kapcsán is feltettem, de nem tudtuk meg a választ.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2014 március 08, 16:34
Írta: svejk Dátum 2014 március 08, 16:34
Valószínűleg ilyen prózai az ok.
Nekem is már többször jó lett volna az 1/4 lépéses üzem.
Nekem is már többször jó lett volna az 1/4 lépéses üzem.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2014 március 08, 16:43
Írta: ANTAL GÁBOR Dátum 2014 március 08, 16:43
légy szíves linkeld el a te adatlapodat 5 ször megnéztem és nem akartam hinni a szememnek
Cím: Re:Léptetőmotor
Írta: 9a43swpp Dátum 2014 március 08, 16:46
Írta: 9a43swpp Dátum 2014 március 08, 16:46
Nézzétek meg a TB6600 adatlapját, az tud 1/4-lépést is. Hogy miért pont az 1/4 maradt ki a 6560-nál, azt csak a tervezői tudhatják [#wink]
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2014 március 08, 16:48
Írta: svejk Dátum 2014 március 08, 16:48
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2014 március 08, 16:54
Írta: ANTAL GÁBOR Dátum 2014 március 08, 16:54
www.hestore.hu/files/TB6560.pdf én meg ezt néztem Lehet a csalafintaság a HQ ill FG kódban rejlik ? ???
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2014 március 08, 16:55
Írta: svejk Dátum 2014 március 08, 16:55
A törvény nem tudása.... :))
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2014 március 08, 16:56
Írta: ANTAL GÁBOR Dátum 2014 március 08, 16:56
Pontosabban a tiedben van egy A betű
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2014 március 08, 16:58
Írta: ANTAL GÁBOR Dátum 2014 március 08, 16:58
a Sir Nyeteg es az AHQ végű..... Hát nem mindegy
Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2014 március 29, 12:40
Írta: Gyárfás Attila Dátum 2014 március 29, 12:40
Üdv
74HC194 nek lenne valamilen helyettesitője?
Köszi
74HC194 nek lenne valamilen helyettesitője?
Köszi
Cím: Re:Léptetőmotor
Írta: t5kzsyyvh Dátum 2014 március 29, 15:31
Írta: t5kzsyyvh Dátum 2014 március 29, 15:31
nem tudom konkreten mire gondolsz, de volt egy ilyen linkem: Bipolar Stepper Drivers
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 március 29, 15:39
Írta: s7manbs8 Dátum 2014 március 29, 15:39
Ha drága a a DIP verzió van TSSOP arra adapter panelkát lehetne csinálni pl. az csak vagy 50 Ft.
Cím: Re:Léptetőmotor
Írta: 97urdfkpc Dátum 2014 március 30, 11:04
Írta: 97urdfkpc Dátum 2014 március 30, 11:04
KEDVES ELEKTRON!
Látom újra aktív vagy a fórumon!
Ezek szerint nem ütött el egy kamion!
Mi lesz a nyákommal? Se kész nyák, se pénz, se válasz se semmi?
Szerinted el van intézve a dolog?
Látom újra aktív vagy a fórumon!
Ezek szerint nem ütött el egy kamion!
Mi lesz a nyákommal? Se kész nyák, se pénz, se válasz se semmi?
Szerinted el van intézve a dolog?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 március 31, 12:37
Írta: 000000000 Dátum 2014 március 31, 12:37
Sziasztok!
Keresek 1 db 3 fázisú 6.3 mm-es tengelyű 56*56 felfogatású 1.3 Nm-es motort!
Tud valaki ilyet!
Keresek 1 db 3 fázisú 6.3 mm-es tengelyű 56*56 felfogatású 1.3 Nm-es motort!
Tud valaki ilyet!
Cím: Re:Léptetőmotor
Írta: RJancsi Dátum 2014 április 10, 17:57
Írta: RJancsi Dátum 2014 április 10, 17:57
Sziasztok! Nagy titokban :) megépítettem életem első CNC maróját amolyan "sufni tuning" szinten, alapvetően eBay-en vett kínai alkatrészekből. (Kezdésnek és tanulni jó lesz.) A kérdéseim: mennyire számít, hogy milyen hosszúak a vezetékek, azaz a motorvezérlő az optikai leválasztó kártyához vagy a motorhoz legyen közelebb? (Wantai Nema17), illetve milyen vezetékeket célszerű használni (árnyékolt, sodrott érpárú stb.)? Előre is köszi a választ!
Cím: Re:Léptetőmotor
Írta: keri Dátum 2014 április 10, 18:18
Írta: keri Dátum 2014 április 10, 18:18
Igazából ahogy jólesik. A leválasztó kártyát és a vezérlőt kvázi egybe szokták építeni.
Nálam a 8A-es 5 fázisú motor (5* nagyobb frekvencia) is sima sokeres villanydróton megy. Nem zavar semmit.
Ebből következik hogy elég a sodrot, sőt még az sem feltétlen kell, de figyelj rá hogy ne érzékeny elektronika közelében vezessed.
Árnyékolni inkább a gyengeáramú jel vezetékeket érdemes, de a printerkábelek árnyékoltak, más ilyen kritikus vezeték meg nincs, a végállás kapcsolókat kondi-ellenállás szűréssel elég leválasztani ha netán érzékeny lenne rá, én még optocsatolót sem szoktam berakni, csak táp-föld közé shottky diódát, az megvédi a bemenetet...de ha te készen vetted a leválasztót azzal nincs dolgod.
Nálam a 8A-es 5 fázisú motor (5* nagyobb frekvencia) is sima sokeres villanydróton megy. Nem zavar semmit.
Ebből következik hogy elég a sodrot, sőt még az sem feltétlen kell, de figyelj rá hogy ne érzékeny elektronika közelében vezessed.
Árnyékolni inkább a gyengeáramú jel vezetékeket érdemes, de a printerkábelek árnyékoltak, más ilyen kritikus vezeték meg nincs, a végállás kapcsolókat kondi-ellenállás szűréssel elég leválasztani ha netán érzékeny lenne rá, én még optocsatolót sem szoktam berakni, csak táp-föld közé shottky diódát, az megvédi a bemenetet...de ha te készen vetted a leválasztót azzal nincs dolgod.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2014 április 10, 18:20
Írta: keri Dátum 2014 április 10, 18:20
Ja, NEMA17-es motornak a lengő UTP kábel is megteszi. Bőven bírja azt az áramot amit kell, és kényelmesen olcsó.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 április 10, 18:45
Írta: 000000000 Dátum 2014 április 10, 18:45
Ne viccelj már !
Kifog egy olyan minőségi kábelt ami fali UTP és alumínium rezezve, azzal lexopja magát 2x !
Múltkor beleszaladtunk egy ilyen csodálatos utp kábel vásárlásba.
Mondanom se kell, hogy jó pár kilométert kihúztam UTP kábelből minden probléma nélkül, csak nem ebből!
Ez a csoda kábel 3 hajtás után legalább 2 ér törést produkált.
És a legszebb, hogy olyan csomagolásban és áron kaptuk mint a 100x jobb minőségű réz társát.
Tehát ha nem akar szívóágra csapódni akkor 90FT-os utp helyett választ egy 140-es 4x0.5 MTK-t és kész.
Ugye ez nem akkora árkülönbség mint amekkorát szívni lehet vele.
Cím: Re:Léptetőmotor
Írta: RJancsi Dátum 2014 április 10, 20:03
Írta: RJancsi Dátum 2014 április 10, 20:03
Mindenkinek köszi a válaszokért! Már csak(?) a Mach3 beállítása van hátra, mert időnként forgás helyett csak rezeg az Y tengely...
Cím: Re:Léptetőmotor
Írta: keri Dátum 2014 április 10, 20:27
Írta: keri Dátum 2014 április 10, 20:27
Ezért mondtam lengőt, azaz flexit, az nem törik el két hajtástól.
Nekem mondjuk 10 mérföldes körzetemben nem volt egy olyan villanyaszerelési bolt ahol kaptam rendes kábelt, jó UTP meg van egy spulnival :)
Sajnos a 8-amperes motorhoz már kevés, oda muszáj volt rendes vastag vezérléstechnikai kábelt vadászni...mert persze az MTK-ban nincs elég ér nekem.
Nekem mondjuk 10 mérföldes körzetemben nem volt egy olyan villanyaszerelési bolt ahol kaptam rendes kábelt, jó UTP meg van egy spulnival :)
Sajnos a 8-amperes motorhoz már kevés, oda muszáj volt rendes vastag vezérléstechnikai kábelt vadászni...mert persze az MTK-ban nincs elég ér nekem.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2014 április 10, 20:29
Írta: keri Dátum 2014 április 10, 20:29
gyorsítást vedd vissza, meg a végsebességet is amíg stabilan nem megy, motor tuning menüpontban.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 április 10, 20:38
Írta: 000000000 Dátum 2014 április 10, 20:38
Hol laksz ember ?
Itt ebben a porfészekben kapásból 4 elektromossági szaküzlet van 5 km-en belül.
Ebből 2-ben akkora készlet van, hogy nehéz olyan kábelt mondani amit nem tudnak azonnal, vagy délutánra kezedbe nyomni.
Legrosszabb esetben másnapra, ha nem reggel 10-ig esel be hozzájuk.
Egyedüli kizáró tényező a rá szánt keret lehet. [#papakacsint]
Cím: Re:Léptetőmotor
Írta: RJancsi Dátum 2014 április 11, 06:42
Írta: RJancsi Dátum 2014 április 11, 06:42
keri: Már próbáltam :( a legjobb eredményt 900-as fordulatszámon és 300-as gyorsuláson (mm-ben dolgozom) értem el. Ha visszavettem a fordulatot 750-re, nemcsak lassult a motor, de sokkal rondább hangja lett. Még nem jöttem rá mi lehet a baja, mert véletlenszerűen hol hibátlanul műxik, hol meg rángatni kezd és időnként ellenkező irányban indul el. Már az összes vezetéket végignéztem, de nem találtam hibát. Lehet, hogy valamelyik vezeték törött, és az visz be zavaró inpulzusokat??? Kicseréltem a motorvezérlőt egy másikkal, de a hiba maradt. Szóval nem a vezérlő hibás.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2014 április 11, 07:59
Írta: besirkyjh Dátum 2014 április 11, 07:59
Szia
Nem irtad hogy milyen tipusu vezérlöt használsz és azt sem hogy asztali PC-t vagy laptoppot .
Milyen a PC-d bios beállitása stb ?
Részletezd kicsit : táp , PC tudás , vezérlö esetleg LPT illesztö stb stb ?
Nem irtad hogy milyen tipusu vezérlöt használsz és azt sem hogy asztali PC-t vagy laptoppot .
Milyen a PC-d bios beállitása stb ?
Részletezd kicsit : táp , PC tudás , vezérlö esetleg LPT illesztö stb stb ?
Cím: Re:Léptetőmotor
Írta: keri Dátum 2014 április 11, 11:46
Írta: keri Dátum 2014 április 11, 11:46
Bolt az itt is van, csak rendes kínálat nincs.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2014 április 11, 11:50
Írta: keri Dátum 2014 április 11, 11:50
Úgy hangzik, mintha a vezérlő bemenete szedne össze zavart. Printerkábelek nem mindig állnak a helyzet magaslatán.
Cím: Re:Léptetőmotor
Írta: dcsaba Dátum 2014 április 11, 12:51
Írta: dcsaba Dátum 2014 április 11, 12:51
Csak egy apróság. Két héten keresztül sz.ptam egy géppel, lépéstévesztés, irányváltás, stb. miatt. Tök véletlenül jöttem rá, hogy a gép mellett lévő szóda-automata hűtője okozza a bajt, amikor a kompresszor bekapcsol... Szal, induktív hálózati terhelés a közelben, ami ki-be kapcsolgat?
Cím: Re:Léptetőmotor
Írta: RJancsi Dátum 2014 április 11, 18:11
Írta: RJancsi Dátum 2014 április 11, 18:11
Mint írtam, a teljes elektronika eBay-ról származik és kínai cuccos. http://www.wantmotor.com/ProductsView.asp?id=278&pid=93
Vannak vele fenntartásaim, pl. minek küldtek optikai leválasztó kártyát a készlethez, amikor a vezérlők bemenete a leírásuk szerint optikai kapus.
Egyébként egy "célszámítógép" üzemelteti, azaz egy régebbi asztali PC, amin az Xp/Service pack 3-on és a MACH3-on kívül semmi más nincs. Még gravírozni valók sem, mert pendrive-n dugom bele a feldolgozni valót. MIt értesz bios beállításon?
Vannak vele fenntartásaim, pl. minek küldtek optikai leválasztó kártyát a készlethez, amikor a vezérlők bemenete a leírásuk szerint optikai kapus.
Egyébként egy "célszámítógép" üzemelteti, azaz egy régebbi asztali PC, amin az Xp/Service pack 3-on és a MACH3-on kívül semmi más nincs. Még gravírozni valók sem, mert pendrive-n dugom bele a feldolgozni valót. MIt értesz bios beállításon?
Cím: Re:Léptetőmotor
Írta: RJancsi Dátum 2014 április 11, 18:12
Írta: RJancsi Dátum 2014 április 11, 18:12
Elnézést, a válaszom Kulcsár Zoltánnak szólt, csak a bejelentkezésnél lemaradt a "címzett".
Cím: Re:Léptetőmotor
Írta: frkdv6dyr Dátum 2014 április 12, 21:37
Írta: frkdv6dyr Dátum 2014 április 12, 21:37
Segítség kellene a mikroma FA-34-4-2 motorhoz. Ismeri valaki?
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2014 április 19, 08:59
Írta: istvan58 Dátum 2014 április 19, 08:59
Hali,
Akkor itt folytatva a kezdő vagyok topikban elkezdetett.
Szóval még azt figyeltem meg hogy a léptető sokkal jobban melegszik ha pl 60V rol hajtom mint 32 röl, peddig szkópal mérve azonos áram folyik rajta. Annyi csak hogy 60V rol egy kissé meredekebb a felfutás. De a motor kb 20 fokkal melegebb.
Akkor itt folytatva a kezdő vagyok topikban elkezdetett.
Szóval még azt figyeltem meg hogy a léptető sokkal jobban melegszik ha pl 60V rol hajtom mint 32 röl, peddig szkópal mérve azonos áram folyik rajta. Annyi csak hogy 60V rol egy kissé meredekebb a felfutás. De a motor kb 20 fokkal melegebb.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2014 április 19, 09:17
Írta: keri Dátum 2014 április 19, 09:17
Ez nem meglepő, mivel az áram görbe alatti területtel arányos a melegedés, hiszen a melegedést kizárólag a tekercsek ohmos ellenállása okozza. Cserébe a tekercsenkénti nyomaték is javulni fog ezzel arányosan.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 április 19, 09:42
Írta: 000000000 Dátum 2014 április 19, 09:42
Mivel nagyobb a feszültség így előbb alakul ki a mágneses tér a tekercsben vagy ahogy írod meredekebb az áram felfutása.
De ha csak a mezei 5.-es fizikánál maradunk magyarázat tekintetében, kétszeres feszültség ugyan akkora áramnál az kapásból kétszeres teljesítmény növekedést jelent.
Viszont akkor az a vezérlő nem áll annyira a helyzet magaslatán ha ezt a feszültség növekedést már nem tudja a PWM kitöltés csökkentésével kompenzálni.
Másrészt nem mindig jó a túlzott feszültség növelés mert az áram lecsengés is lehet káros ha az már beindítja a szupresszort.
A keletkező áramlökések a Lenz-törvény szerint az őt létrehozó hatást akadályozni igyekszik, vagyis az áram kikapcsolásakor igyekszik fenntartani azt.
Hasonló jelenség figyelhető meg bekapcsoláskor is, csak akkor az indukálódó áramlökés ellentétes az áramforrás áramával.
Lehet páran szórakoztak azzal, hogy egy relére úgy kötöttek 9 voltos elemet, hogy az úgy működjön mint egy csengő és a tekercs kivezetéseit meghosszabbítva levezették a készüléken és ezt hanyag eleganciával átdobták valakinek aki el is kapta [#hehe]
Az megtanulta egyből mi az a Lenz-törvény mikor a tekercs próbálja fenntartani az áramot ami csak úgy lehetséges ha a feszültséget a végtelenhez próbálja emelni.
Kezdők mikor megépítik az első relés elektronikus kütyüjüket, és hát minek is tegyük bele azt a visszacsapást védő diódát a relé lábai közé mert az drága.
Na ilyenkor van az a bizonyos első és egyben utolsó kapcsolása az áramkörnek [#hehe]
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2014 április 19, 09:49
Írta: istvan58 Dátum 2014 április 19, 09:49
Nos az áram nem változik, de mivel nagyobb a feszültség ezért meredekebb, de szkópal csak szinuszt látok áram mérésnel.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2014 április 19, 09:53
Írta: istvan58 Dátum 2014 április 19, 09:53
Amugy a legtobb helyen a maximális feszültségnek a 32x négyzetgyök tekercs induktivitás (mH-ben)
Esetembe 32x gyök 3.8 =62V
Esetembe 32x gyök 3.8 =62V
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 április 19, 10:09
Írta: 000000000 Dátum 2014 április 19, 10:09
60 voltnál ez akkor 117 volt és általában a 90-nél indul a szupresszor ami már káros lehet a motor sebességére.
Igaz ezeket a leadshine vezérlőket nem veséztem ki, de van itt belőle és úgysem használok léptetőmotort, majd jól kibelezem megnézem, hogy védekezik [#hehe]
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2014 április 19, 10:24
Írta: istvan58 Dátum 2014 április 19, 10:24
A tappon van egy 85V os supressor dioda. AM882 vezérlő.
De a tapvonalon nem lehett több 62V-nal.
De a tapvonalon nem lehett több 62V-nal.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 április 19, 11:25
Írta: 000000000 Dátum 2014 április 19, 11:25
De ki beszél itt a táp oldalról, a tekercs oldali fezsültség lökésekről volt szó.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2014 április 19, 12:17
Írta: istvan58 Dátum 2014 április 19, 12:17
Ott nem igen láttam semmit a fettek körül
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2014 április 19, 13:37
Írta: Vetesi75 Dátum 2014 április 19, 13:37
Nem lehetséges, hogy a vasveszteség növekszik meg jelentősen? Meredekebb felfutás - nagyobb amolitudójú magasfrekvenciás összetevők.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2014 április 19, 13:52
Írta: istvan58 Dátum 2014 április 19, 13:52
De valószínű, azért nő az áram felvétel is nagyobb fordulaton........ez eddig eszembe sem jutott...[#worship]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 április 19, 18:15
Írta: 000000000 Dátum 2014 április 19, 18:15
Hello
2D A4988 Pololu -val vezérelnék két nema17 léptető motort.
Léptető motor paraméterei: 5V és 1,2A
Adapterem: 3-12V és 1A
Kérdésem az lenne, hogy használhatom e ezt az adapteremet két nema17 léptető motor-hoz, anélkül, hogy károsodjanak a motorok?
És mi van akkor, hogyha pl. a motorokat 8V és 1A -rel használom?
Vagy 6V és 2A -rrel?
2D A4988 Pololu -val vezérelnék két nema17 léptető motort.
Léptető motor paraméterei: 5V és 1,2A
Adapterem: 3-12V és 1A
Kérdésem az lenne, hogy használhatom e ezt az adapteremet két nema17 léptető motor-hoz, anélkül, hogy károsodjanak a motorok?
És mi van akkor, hogyha pl. a motorokat 8V és 1A -rel használom?
Vagy 6V és 2A -rrel?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 április 19, 18:43
Írta: s7manbs8 Dátum 2014 április 19, 18:43
Az a feszültség is kicsi lesz, jobban jársz ha adsz neki vagy 24Vot, amper nem sok kell , 0.5A elég 24V ról, két adaptert összekötsz pl .az elég 2-3 motornak is.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 április 19, 19:14
Írta: 000000000 Dátum 2014 április 19, 19:14
két adapter összekötése alatt mit értesz?
És mi van akkor, hogyha pl. a motorokat 8V és 1A -rel használom?
Vagy 6V és 2A -rel?
És mi van akkor, hogyha pl. a motorokat 8V és 1A -rel használom?
Vagy 6V és 2A -rel?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 április 19, 19:14
Írta: 000000000 Dátum 2014 április 19, 19:14
Érdekes lehetne, válasz szempontjából. Ha beírnád a Pololu paramétereit.
Mivel, azt sokan nem ismerik.
Pl. Menyi annak az alsó feszültséghatára?
Az, hogy nema 17, vagy nema akármennyi. Nincs jelentősége. Az, a motor, felfogató méretét jelöli.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 április 19, 19:40
Írta: 000000000 Dátum 2014 április 19, 19:40
Pololu A4988
http://www.pololu.com/product/1182
Két adapter összekötése alatt mit értesz?
És mi van akkor, hogyha pl. a motorokat 8V és 1A -rel használom?
Vagy 6V és 2A -rel?
http://www.pololu.com/product/1182
Két adapter összekötése alatt mit értesz?
És mi van akkor, hogyha pl. a motorokat 8V és 1A -rel használom?
Vagy 6V és 2A -rel?
Cím: Re:Léptetőmotor
Írta: Devecz Miklós Dátum 2014 április 19, 19:43
Írta: Devecz Miklós Dátum 2014 április 19, 19:43
A minimális feszültség, amivel üzemeltetni lehet 8V, de ez az alsó határ.
Itt már kicsit bizonytalan a müködtetés, ezt jobb magasabb értéken tartani.
Itt már kicsit bizonytalan a müködtetés, ezt jobb magasabb értéken tartani.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 április 19, 20:09
Írta: 000000000 Dátum 2014 április 19, 20:09
mit ajánlotok?
stabilan károsodás nélkül működtethető 6V 1A ról két motor?
stabilan károsodás nélkül működtethető 6V 1A ról két motor?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 április 19, 20:21
Írta: s7manbs8 Dátum 2014 április 19, 20:21
Két adapter kimenő két lába közül kettőt kötsz össze és a maradék kettőn dupla annyi feszültséget kapsz, pl. 12v-ból 24v-ot, Ampered ugyanannyi lesz, mint amit egyenként tudnak, de dupla feszültséged van és a motor sokkal gyorsabban tud mozogni, mint fele annyival.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 április 19, 20:21
Írta: s7manbs8 Dátum 2014 április 19, 20:21
Azon a POLOLU vezérlőn is 1A felet kell neki hűtés jobban, arra ügyelni kell, meg áramerősséget be lehet állítani, ami a motorodnak kell.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 április 19, 20:40
Írta: 000000000 Dátum 2014 április 19, 20:40
van gyári hűtő borda a pololu A4988 -nak.
stabilan károsodás nélkül működtethető 6V 1A ról két motor?
A motoroknak csak egy Damilt kell mozgatniuk... nem kell gyorsnak lenniük...
stabilan károsodás nélkül működtethető 6V 1A ról két motor?
A motoroknak csak egy Damilt kell mozgatniuk... nem kell gyorsnak lenniük...
Cím: Re:Léptetőmotor
Írta: Devecz Miklós Dátum 2014 április 19, 20:58
Írta: Devecz Miklós Dátum 2014 április 19, 20:58
Makacs vagy.
Nem.
Nem.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 április 19, 20:59
Írta: s7manbs8 Dátum 2014 április 19, 20:59
Minimum 8 V kell, itt írta valaki, ha a motorodat beállítod a neki megfelelő amperre, az nem fog leégni. A motorod meg 1.2A-es tehát attól több áram kell neki nem gondolod ? A vezérlő is lemelegít valamennyit tehát nem árt egy kicsivel több, de hát van annyi trafó, mint a nyű, ez nem lehet akadály, hogy kicsit nagyobbat tegyél.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 április 19, 21:00
Írta: s7manbs8 Dátum 2014 április 19, 21:00
Ha nem kell nagy erőt kifejteni a motort nem kell a neki megfelelő árammal hajtani sem, mehet valamivel kevesebbel, lehet 0.8A is elég neki. Ha nagyon spórolni akarsz.
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2014 április 19, 21:18
Írta: Vetesi75 Dátum 2014 április 19, 21:18
Visszatérve az eredeti kérdésre: Az adaptered szerintem nem alkalmas a 2db motor + a meghajtók tápellátására.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 április 19, 22:15
Írta: 000000000 Dátum 2014 április 19, 22:15
stabilan károsodás nélkül működtethető 6V 0,8A ről két motor?
hacsak egy tollat kell mozgatni?
hacsak egy tollat kell mozgatni?
Cím: Re:Léptetőmotor
Írta: Devecz Miklós Dátum 2014 április 19, 22:17
Írta: Devecz Miklós Dátum 2014 április 19, 22:17
#4354
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 április 19, 22:20
Írta: s7manbs8 Dátum 2014 április 19, 22:20
Igen, de mozogni nem fog ... :)
Cím: Re:Léptetőmotor
Írta: Devecz Miklós Dátum 2014 április 19, 22:24
Írta: Devecz Miklós Dátum 2014 április 19, 22:24
Szerintem hagyjuk rá. [#levele]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 április 19, 23:14
Írta: 000000000 Dátum 2014 április 19, 23:14
Szerintem, neki is érdemes lenne egy gépépítős topikot nyitni.
Kiélhetnénk, összes segítő anbiciónkat.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 április 20, 02:42
Írta: 000000000 Dátum 2014 április 20, 02:42
Jaj, ne viccelj már:))
Annyi mindent lehet hajtani 1 adapterrel is, ami 0,5 Amperos.
Az unokám, 6 libát hajtott 1 ilyen adapterrel.
Az adaptert fogta, a zsinórját suhogtatta. A libák szaladtak.
Szerintem legalább 5 ezerrel mentek a libák:))
Ráadásul, 6 darab.
Tudom, hogy hihetetlen, de igaz:))
Csak, számolj utána:))
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2014 április 20, 07:21
Írta: besirkyjh Dátum 2014 április 20, 07:21
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2014 április 20, 09:03
Írta: ht0cjk58i Dátum 2014 április 20, 09:03
Üdv urak.Egy 20 fogas T5 kerék megtett útját 1 fordulatra hogy számolom ki?
Cím: Re:Léptetőmotor
Írta: VighLajos Dátum 2014 április 20, 09:10
Írta: VighLajos Dátum 2014 április 20, 09:10
Fogtávolság 5 mm, van húsz fog, 20x5=100 mm.
Remélem, ez nem olyan beugratós, mint ez:
Két ház között van 200 m. Távvezetéket kell kiépíteni, oszloptávolság 50 m.
Hány oszlop kell?
Nem 4, hanem öt, mivel oszloppal kell kezdeni és befejezni.
[#wink]
Remélem, ez nem olyan beugratós, mint ez:
Két ház között van 200 m. Távvezetéket kell kiépíteni, oszloptávolság 50 m.
Hány oszlop kell?
Nem 4, hanem öt, mivel oszloppal kell kezdeni és befejezni.
[#wink]
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2014 április 20, 09:11
Írta: besirkyjh Dátum 2014 április 20, 09:11
Szia
A linearitási problémák miatt csak méréssel , de a kerülete a keréknek elég jo kiindulási pont .
A linearitási problémák miatt csak méréssel , de a kerülete a keréknek elég jo kiindulási pont .
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2014 április 20, 09:12
Írta: ht0cjk58i Dátum 2014 április 20, 09:12
Köszönöm!!!! Én az osztókörrel való számolásra tippeltem
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2014 április 20, 09:18
Írta: besirkyjh Dátum 2014 április 20, 09:18
Ha a Mach3 config miatt kérdezed akkor jelentéktelen a kerék egyfordulata álltal megtett ut .Ami számit az a stepper ( vagy szervo ) egykörére esö linearis elmozdulás .A kerék átméröböl eetleg max pozicionálo sebesség számolhato ) .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 április 20, 09:20
Írta: 000000000 Dátum 2014 április 20, 09:20
Átmérő, szorozva Pi –vel.
A fel sem tett kérdésre pedig az a válasz:
Ha, az eredmény 100 –at osztod a fordulatonkénti lépésszámmal. Akkor megkapod az egy lépésre eső, megtett utat.
Az, az, a felbontást.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2014 április 20, 09:24
Írta: ht0cjk58i Dátum 2014 április 20, 09:24
A felbontás miatt kérdeztem, már rég számoltam bordás szíjjal :), de csak nem felejtettem még el.
Cím: Re:Léptetőmotor
Írta: w987wzmm Dátum 2014 április 20, 09:26
Írta: w987wzmm Dátum 2014 április 20, 09:26
Kérdésedre a válasz!

Cím: Re:Léptetőmotor
Írta: Devecz Miklós Dátum 2014 április 20, 09:41
Írta: Devecz Miklós Dátum 2014 április 20, 09:41
Cím: Re:Léptetőmotor
Írta: Devecz Miklós Dátum 2014 április 20, 09:43
Írta: Devecz Miklós Dátum 2014 április 20, 09:43
Az eredeti kérdés "Pololu A4988" stepper driverre vonatkozott!
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2014 április 20, 12:16
Írta: besirkyjh Dátum 2014 április 20, 12:16
Szia
Igen tudom , de nem akarja elfogadni amit mondunk .Szerintem a kérdése sem tiszta .( lehet még elötte sem ? ) :)
Igen tudom , de nem akarja elfogadni amit mondunk .Szerintem a kérdése sem tiszta .( lehet még elötte sem ? ) :)
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2014 április 20, 12:20
Írta: besirkyjh Dátum 2014 április 20, 12:20
Fel mentem kicsit melozni és gondolkodtam amit irtál .
Gyakorlatban ezt hogyan csinálod ? Leirnád pontosan hogy miböl derül ki hogy egy szijkerék egyköréhez hány motor lépés kel ?
Gyakorlatban ezt hogyan csinálod ? Leirnád pontosan hogy miböl derül ki hogy egy szijkerék egyköréhez hány motor lépés kel ?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 április 20, 12:27
Írta: 000000000 Dátum 2014 április 20, 12:27
Maga a Pololu A4988 is 8V és 35V körül működik, max. 1A hűtés nélkül, és max. 2A hűtéssel.
De ezt már leírták előttem.
Nem hiszem, hogy nincs otthon egy kidobásra ítélt nagyobb trafó a megfelelő tápfesz és tápáram eléréséhez.
De ezt már leírták előttem.
Nem hiszem, hogy nincs otthon egy kidobásra ítélt nagyobb trafó a megfelelő tápfesz és tápáram eléréséhez.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2014 április 20, 12:38
Írta: besirkyjh Dátum 2014 április 20, 12:38
Szia
Nem érti az összefüggést a vezérlö müködtetö feszültsége és a motorra irt feszültség között .
Az is lehet hogy csak a kérdés fontos a számára :)
Nem érti az összefüggést a vezérlö müködtetö feszültsége és a motorra irt feszültség között .
Az is lehet hogy csak a kérdés fontos a számára :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 április 20, 13:28
Írta: 000000000 Dátum 2014 április 20, 13:28
„Gyakorlatban ezt hogyan csinálod ? Leirnád pontosan hogy miböl derül ki hogy egy szijkerék egyköréhez hány motor lépés kel ?”
Először is, örülök, ha pici gondolkodás után válaszolsz a beírásomra. Pont így vagyok mással is:))
Ugyanúgy csinálnám, ahogy rólad feltételezem.
Mivel, azt tudjuk, mennyi lépés kell a motor tengelyének egy fordulatához.
Pont annyi kell a tengelyén lévő tárcsának is.
,,,,,,,,,,,,,,,,,
A szíjkeréknek nem kell semennyi lépés. Az annyit kap amennyit adnak neki:))
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2014 április 20, 15:57
Írta: besirkyjh Dátum 2014 április 20, 15:57
Hát nem is tudom .
Másra számitottam , mert a kérdésböl nem derül ki hogy hajto vagy hajtott oldali keréknek az egykörre esö " utját " keresi .
Számomra értelmezhetöbb ha semmiféle kereket nem veszek figyelembe csak a linearis elnozdulást a pl léptetö egyfordulatára .
" Ha, az eredmény 100 –at osztod a fordulatonkénti lépésszámmal. Akkor megkapod az egy lépésre eső, megtett utat."
Ez a mondatod kavar össze mert egy 200mm kerületü tárcsához nem jöhet ki ugyan az a felbontás a #4370-es beirásod szerint , pedig annak kellene .
A mostani irásodnak meg az érvilágon semmi köze a léptetön lévö tárcsa kerületéhez , ha a tengelyen van akkor az is 360fokot fordul , logikusan .
Valamit elirtál .
Másra számitottam , mert a kérdésböl nem derül ki hogy hajto vagy hajtott oldali keréknek az egykörre esö " utját " keresi .
Számomra értelmezhetöbb ha semmiféle kereket nem veszek figyelembe csak a linearis elnozdulást a pl léptetö egyfordulatára .
" Ha, az eredmény 100 –at osztod a fordulatonkénti lépésszámmal. Akkor megkapod az egy lépésre eső, megtett utat."
Ez a mondatod kavar össze mert egy 200mm kerületü tárcsához nem jöhet ki ugyan az a felbontás a #4370-es beirásod szerint , pedig annak kellene .
A mostani irásodnak meg az érvilágon semmi köze a léptetön lévö tárcsa kerületéhez , ha a tengelyen van akkor az is 360fokot fordul , logikusan .
Valamit elirtál .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 április 20, 17:55
Írta: 000000000 Dátum 2014 április 20, 17:55
Látom, nem hiába gondolkodtál a válaszon.
Mindenféle, környezetéből kiragadott részekkel. Sikerült úgy kikavarni, valahogy kijöjjön. Hülye vagyok a CNC –hez. A működése meg annyira távol ál tőlem, hogy távcsővel se látom.
Jó, bevált recept. Már használtad máskor is. Ezt, a kavarás technikát.
Na, a továbbiakban ebbe a bujtatott hülyézésbe, nem veszek részt.
Mert ugye, mindenki tudja. Az ominózus részben, a fogasszíj egy lépésre eső, megtett útjának kiszámolásáról beszélek.
Az, az, a felbontásról.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2014 április 20, 18:37
Írta: besirkyjh Dátum 2014 április 20, 18:37
Alakul
Igen ez igy igaz de szeretem ki mondatni az emberekkel ha valamit nem jol látnak ( föleg ha azt tanácsként teszik ) , nem mindig vállik be mert sokszor ködösit az illetö vagy megprobál valami mögé bujni .
Egyszoval nem mondtam hogy hülye vagy a cnc-hez csak azt várnám el hogy gondold át mit irsz és hova .
Igen ez igy igaz de szeretem ki mondatni az emberekkel ha valamit nem jol látnak ( föleg ha azt tanácsként teszik ) , nem mindig vállik be mert sokszor ködösit az illetö vagy megprobál valami mögé bujni .
Egyszoval nem mondtam hogy hülye vagy a cnc-hez csak azt várnám el hogy gondold át mit irsz és hova .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 április 20, 20:21
Írta: 000000000 Dátum 2014 április 20, 20:21
Igen, alakul.
Ez is egy jó taktikának látszik. Amit mostanában nem először tapasztalok.
Mindenféle kavarásokkal elvenni a kedvem a segítségadástól.
Ha, beválik, szépen kiesek a tudatból. A régi dolgaimra meg a kutya sem emlékszik már.
Azonnal igazolódik az, amit, kezdenek tolni a kedves „barátaim”.
Mindig csak a levegőt rontottam. Semmi hasznosat nem tettem a közösségnek.
Ezért semmi keresnivalóm itt a fórumon.
Szép kis történet.
Na, ezzel itt az offolást bezártnak tekintem.
Utóiratként csak annyit. A kérdező rögtön értette miről írtam. Minden, csűrés, csavarás nélkül.
Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2014 április 21, 08:12
Írta: Gyárfás Attila Dátum 2014 április 21, 08:12
Üdv
Van lentebb egy agle terv ,egy mocivezérlőről 74H194 van benne. Viszont mind a 4 kimeneten folyamatos fesz van. A moci csak zizeg. Ledekkel is próbáltm hogy léptet e,de mind folyamatosan világit. A potit tekerve,a visszajelző led gyorsabb vagy lassabban villog,de a kimenet nem változik. Mindent megnéztem gyakorlatilag jó minden.
12v a bemeneti fesz.
Igaz csak 74194 es em volt,nem a 74hc-s. Nem lehet hogy ez a baj?
A mocim 6v os,
Szerintetek mi a gond?
Van lentebb egy agle terv ,egy mocivezérlőről 74H194 van benne. Viszont mind a 4 kimeneten folyamatos fesz van. A moci csak zizeg. Ledekkel is próbáltm hogy léptet e,de mind folyamatosan világit. A potit tekerve,a visszajelző led gyorsabb vagy lassabban villog,de a kimenet nem változik. Mindent megnéztem gyakorlatilag jó minden.
12v a bemeneti fesz.
Igaz csak 74194 es em volt,nem a 74hc-s. Nem lehet hogy ez a baj?
A mocim 6v os,
Szerintetek mi a gond?
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2014 április 21, 08:55
Írta: besirkyjh Dátum 2014 április 21, 08:55
Szia
Müszerek nélkül nehézkes lesz .
Ugyan azt a nyákot csináltad meg mint amit az Elektron csatolt ide ?
A HC nem hiszem hogy gondot jelent most .
Meg kellene nézni hogy a 74194 8-as és 16-os lábán ott van-e az 5V táp ( 16-os pozitiv és a 8-as negativ ( GND ), direkt az IC lábain mérj .Az ULN elött is meg kellene nézni hogy a 74194 10 - 11 - 12 - 13 lábakon van-e valami változo feszültség ( ha lehet az ULN-t addig vedd ki mig mérsz .
Müszerek nélkül nehézkes lesz .
Ugyan azt a nyákot csináltad meg mint amit az Elektron csatolt ide ?
A HC nem hiszem hogy gondot jelent most .
Meg kellene nézni hogy a 74194 8-as és 16-os lábán ott van-e az 5V táp ( 16-os pozitiv és a 8-as negativ ( GND ), direkt az IC lábain mérj .Az ULN elött is meg kellene nézni hogy a 74194 10 - 11 - 12 - 13 lábakon van-e valami változo feszültség ( ha lehet az ULN-t addig vedd ki mig mérsz .
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2014 április 21, 13:51
Írta: Vetesi75 Dátum 2014 április 21, 13:51
Ha jól rémlik, a 194-es az léptetőregiszter...
Lehet, hogy megfelelően léptet is, csak a soros beíró bemeneten mindig ugyan azt a logikai szintet kapja? Törlő bemenet, engedélyezők jó helyre vannak kötve?
Lehet, hogy megfelelően léptet is, csak a soros beíró bemeneten mindig ugyan azt a logikai szintet kapja? Törlő bemenet, engedélyezők jó helyre vannak kötve?
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2014 április 21, 15:52
Írta: ht0cjk58i Dátum 2014 április 21, 15:52
Köszönöm Uraim a segítséget.A végén meg lett a bibi, emlékezetből 20 fogra vettem a számítást és nem jött ki a mért elmozdulás sehogy sem a szíjon.Ezért is kérdeztem mert én is így tudtam,na szóval a sok sör megártott :), megszámoltam a fogakat és lőn csoda nem 20 hanem 18 van neki.Ezért nem akart kijönni az elmozdulás.Jár így az ember :).Ha kész lesz a gép akkor a Török Tomi engedelmével teszünk fel képeket.Egyébként már működik a gép csupán finomítani kell és teljes erővel hasíthatja a habot.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2014 április 21, 15:56
Írta: ht0cjk58i Dátum 2014 április 21, 15:56
Valószínűleg a mostani 18 fogas kerék cserélve lesz 10 fogasra, kicsit bizonytalannak érzem a mozgást a habvágáshoz, egyébként szépen simán jár csak nagyobb sebességen, de a habhoz kicsi sebesség kell.
Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2014 április 21, 17:53
Írta: Gyárfás Attila Dátum 2014 április 21, 17:53
Csak a 11 -es lábon változik minimálisan a fesz, a többin mindenhol meg van az 5V.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 április 21, 17:55
Írta: s7manbs8 Dátum 2014 április 21, 17:55
Megmérjem neked ? Vagy mi lehet a baja ?
Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2014 április 29, 08:25
Írta: Gyárfás Attila Dátum 2014 április 29, 08:25
Üdv
Még mindig itt tartok. Átnéztünk minden alkatrészt,kicseréltünk, jó minden. Viszont ahogy múltkor is írtam, ledekkel próbálva sem léptet. A mocival csak zizeg.
A linken van az itt közzétett eagle terv, és az én általam legyártott nyák terve is. Átnéztem, de eltérést nem találok, hogy esetleg az lenne-e a hiba. De több szem többet lát, hátha valaki észrevesz valami eltérést, mert csak erre tudok gondolni.
LINK
Köszi
Még mindig itt tartok. Átnéztünk minden alkatrészt,kicseréltünk, jó minden. Viszont ahogy múltkor is írtam, ledekkel próbálva sem léptet. A mocival csak zizeg.
A linken van az itt közzétett eagle terv, és az én általam legyártott nyák terve is. Átnéztem, de eltérést nem találok, hogy esetleg az lenne-e a hiba. De több szem többet lát, hátha valaki észrevesz valami eltérést, mert csak erre tudok gondolni.
LINK
Köszi
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2014 április 29, 08:37
Írta: besirkyjh Dátum 2014 április 29, 08:37
Szia
Lehet buta kérdés : unipoláriban van kötve a léptetö rá ?
Lehet buta kérdés : unipoláriban van kötve a léptetö rá ?
Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2014 április 29, 09:10
Írta: Gyárfás Attila Dátum 2014 április 29, 09:10
Ilyen a moci:
Moci
A 6 "vezetékes". De nem is a mocival van baj, mert ha a 4 kimenetre ledeket teszek, azt is kellene léptetni. De mind folyamatosan világít, hiába állitom a potit a leglassabbra.
Moci
A 6 "vezetékes". De nem is a mocival van baj, mert ha a 4 kimenetre ledeket teszek, azt is kellene léptetni. De mind folyamatosan világít, hiába állitom a potit a leglassabbra.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 április 29, 13:04
Írta: s7manbs8 Dátum 2014 április 29, 13:04
A tranzisztorok jó irányban vannak bekötve ? Azt lehet rosszul is betenni pl.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 április 29, 13:06
Írta: s7manbs8 Dátum 2014 április 29, 13:06
Az 555 IC- n jön ki a jele, a változó frekvenciájú, ahogy állítod a potival, azt is meg lehet nézni, hogy addig jó e, utána meg bemegy a 194-be, hogy ott lenne a bibi e vajon vagy hol akad el a dolog.
Cím: Re:Léptetőmotor
Írta: robokacsa Dátum 2014 április 29, 13:08
Írta: robokacsa Dátum 2014 április 29, 13:08
a rajzot sajna nem tudom meg nézni, de nem lehet, hogy túl gyorsan próbálod léptetni?, (még a leg lassabb állapotban is gyorsan.)
Cím: Re:Léptetőmotor
Írta: robokacsa Dátum 2014 április 29, 23:40
Írta: robokacsa Dátum 2014 április 29, 23:40
most sikerült megnéznem a rajzot, nem egy bonyolult dolog.
próbálok lehetőségeket mondani mitől lehet, egy kis műszerezettség nem árt hozzá.
-biztosan megfelelő értékűek az alkatrészek, amik be vannak építve, főleg az oszcillátorba, nem e 10, vagy 100 szor gyorsabban megy?
az uln ic pár kimenete nincs e lezárlatosodva.
közbe még gondolkodom, de mennem kell.
próbálok lehetőségeket mondani mitől lehet, egy kis műszerezettség nem árt hozzá.
-biztosan megfelelő értékűek az alkatrészek, amik be vannak építve, főleg az oszcillátorba, nem e 10, vagy 100 szor gyorsabban megy?
az uln ic pár kimenete nincs e lezárlatosodva.
közbe még gondolkodom, de mennem kell.
Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2014 április 30, 08:57
Írta: Gyárfás Attila Dátum 2014 április 30, 08:57
Az alkatrészeket kicseréltem, átmértem. Zárlat sehol nincs. Van rajta egy visszajelző led, ami gyakorlatilag a sebességet mutatja, úgy villog ahogy a potit tekerem. Elvileg a kimeneten is ilyen sebességnek kellene lennie. Úgyhogy passz.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 április 30, 14:48
Írta: s7manbs8 Dátum 2014 április 30, 14:48
Akkor az 555 IC rész működik, most már csak azt kell megnézni, hogy a HC194 be milyen jelek mennek vajon, mert annak meg a törlő bemenete meg a léptető stb. hogy ha ott bemegy, ki meg mégse jön az mitől lehet. Küldhettél volna egy példányt megnéztem volna.
Cím: Re:Léptetőmotor
Írta: yy2yggmv7 Dátum 2014 május 02, 06:03
Írta: yy2yggmv7 Dátum 2014 május 02, 06:03
Bocs ,hogy szólok de megnéztem a moci adatlapját és ott a fázisáram 1,2A ,az ULN2803 pedig Max 50V/0,5A-es.
Szerintem elszállt az IC, de elnézést ha tévedek és elnéztem valamit.
Szerintem elszállt az IC, de elnézést ha tévedek és elnéztem valamit.
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2014 május 03, 17:22
Írta: Vetesi75 Dátum 2014 május 03, 17:22
A bekapcsolás pillanatában az irányt adó kapcsoló valamelyik állásban zárva van?
Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2014 május 04, 09:23
Írta: Gyárfás Attila Dátum 2014 május 04, 09:23
Igen az egyik irány zárva van.
Cím: Re:Léptetőmotor
Írta: 2dbfy8y Dátum 2014 május 06, 20:45
Írta: 2dbfy8y Dátum 2014 május 06, 20:45
Sziasztok!
Valaki ismeri a H1-es vezérlőt?
Annál van valami áram, amper beállítási lehetőség?
Meg 8 vezetékes moci most 6 vezetékesre van bekötve. Itt is be lehet kötni 4 vezetékesként?
Valaki ismeri a H1-es vezérlőt?
Annál van valami áram, amper beállítási lehetőség?
Meg 8 vezetékes moci most 6 vezetékesre van bekötve. Itt is be lehet kötni 4 vezetékesként?
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2014 május 06, 20:49
Írta: s5f8tmfv3 Dátum 2014 május 06, 20:49
Itt minden kérdésedre választ találsz.
Cím: Re:Léptetőmotor
Írta: 2dbfy8y Dátum 2014 május 06, 21:09
Írta: 2dbfy8y Dátum 2014 május 06, 21:09
Köszi!
Egyik havernak vettük ezt, de lehet bukta lesz.
Lehet jobb lett volna, már a bevált msd.
Egyik havernak vettük ezt, de lehet bukta lesz.
Lehet jobb lett volna, már a bevált msd.
Cím: Re:Léptetőmotor
Írta: 279nwbpsa Dátum 2014 május 06, 21:51
Írta: 279nwbpsa Dátum 2014 május 06, 21:51
Szia Pabló!
Ez gondolom a tőlem vásárolt szett?
Ez a H1 egy unipoláris vezérlő,
6 vezetékes(unipoláris)motorokat köthetsz rá.Vagy unipolárisként bekötve,8 vez. mocikat.
Bipoláris,4 vez. motorok nem jók hozzá.
Az áramot,a nyákon található potival lehet 0.1A-4.7A között állítani.Feszültség Max.50Vdc
A jelenlegi táp,egy 24V/10A-es toroiddal készült.
Ez gondolom a tőlem vásárolt szett?
Ez a H1 egy unipoláris vezérlő,
6 vezetékes(unipoláris)motorokat köthetsz rá.Vagy unipolárisként bekötve,8 vez. mocikat.
Bipoláris,4 vez. motorok nem jók hozzá.
Az áramot,a nyákon található potival lehet 0.1A-4.7A között állítani.Feszültség Max.50Vdc
A jelenlegi táp,egy 24V/10A-es toroiddal készült.
Cím: Re:Léptetőmotor
Írta: 279nwbpsa Dátum 2014 május 06, 22:02
Írta: 279nwbpsa Dátum 2014 május 06, 22:02
Ja,az áram beállítására szolgáló potik ki vannak vezetve a doboz előlapjára,könnyű hozzájuk férni.
Cím: Re:Léptetőmotor
Írta: 2dbfy8y Dátum 2014 május 06, 22:49
Írta: 2dbfy8y Dátum 2014 május 06, 22:49
Szia!
Talált! [#nevetes1]
Kivezetve a doboz előlapjára?
Ott nem igazán láttam én.
Talált! [#nevetes1]
Kivezetve a doboz előlapjára?
Ott nem igazán láttam én.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 május 07, 08:00
Írta: 000000000 Dátum 2014 május 07, 08:00
Sziasztok!
Szeretnék véleményt kérni a kínai léptetőmotorokkal kapcsolatban!
Jelenleg tele van az e-bay wantai és longs nevű termékekkel.
10-12Nm-es szettek 3 motorral 3 táppal 3 vezérlővel 1 párhuzamos csatolóval 110eFt környékén vannak.
Kínai szett
Láttam már itt a fórumon is ilyeneket hirdetve, csak azok kisebbek voltak.
Érdemes ezeket megvenni?
Sajnos a külföldi fórumokon csak több évvel ezelőtti véleményeket találtam, bár azok között volt sok negatív is, de volt olyan személy is, aki sokat használt fel ezekből hiba nélkül.
Tehát érdemes beruházni ezekbe?
Köszönöm a segítséget előre is!
Szeretnék véleményt kérni a kínai léptetőmotorokkal kapcsolatban!
Jelenleg tele van az e-bay wantai és longs nevű termékekkel.
10-12Nm-es szettek 3 motorral 3 táppal 3 vezérlővel 1 párhuzamos csatolóval 110eFt környékén vannak.
Kínai szett
Láttam már itt a fórumon is ilyeneket hirdetve, csak azok kisebbek voltak.
Érdemes ezeket megvenni?
Sajnos a külföldi fórumokon csak több évvel ezelőtti véleményeket találtam, bár azok között volt sok negatív is, de volt olyan személy is, aki sokat használt fel ezekből hiba nélkül.
Tehát érdemes beruházni ezekbe?
Köszönöm a segítséget előre is!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 május 07, 09:02
Írta: 000000000 Dátum 2014 május 07, 09:02
Első blikkre a mérete alapján a felére tippelném a nyomatékot.
Legalább is amit a t2cnc-nél vettünk 12Nm-est az jóval méretesebb volt.
Mert úgy emlékszem az nem 32 hanem NEMA42 méretű.
Mellesleg mihez kell ekkora nyomaték, mert egy kis alu vázas gépet úgy szaggatná szét mint üzbég paraszt a tangóharmonikát. [#hehe]
Cím: Re:Léptetőmotor
Írta: 279nwbpsa Dátum 2014 május 07, 09:28
Írta: 279nwbpsa Dátum 2014 május 07, 09:28
Ne haragudj,de nem mostani dolog,lehet,hogy rosszul emlékezem rá...
Így sincsen gáz,mert,ha a doboz fedelét lecsavarozod,akkor látható a vezérlő és rajta a potik.0.1A-4.7A között állíthatsz...
Így sincsen gáz,mert,ha a doboz fedelét lecsavarozod,akkor látható a vezérlő és rajta a potik.0.1A-4.7A között állíthatsz...
Cím: Re:Léptetőmotor
Írta: 2dbfy8y Dátum 2014 május 07, 16:50
Írta: 2dbfy8y Dátum 2014 május 07, 16:50
Tetejét tegnap lekaptam, csak nem tudtam merre felé kell állítani!
Meg A-B-C poti van, gondolom az az X-Y-Z
Meg a másik kérdésem, hogy kicsit nem e lehet halkítani a sípolásán?
Gondolom ezt a motor adja, ahogyan gerjed.
Meg azt vettem észre, ha álló helyzetből indul, nehezebben akar megindulni, mintha menet közben irányt vált, és megindul ellenkező irányba.
Ezt mi okozhatja? Nagy lehet a tartó áram helyzete?
Meg A-B-C poti van, gondolom az az X-Y-Z
Meg a másik kérdésem, hogy kicsit nem e lehet halkítani a sípolásán?
Gondolom ezt a motor adja, ahogyan gerjed.
Meg azt vettem észre, ha álló helyzetből indul, nehezebben akar megindulni, mintha menet közben irányt vált, és megindul ellenkező irányba.
Ezt mi okozhatja? Nagy lehet a tartó áram helyzete?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 május 07, 17:12
Írta: 000000000 Dátum 2014 május 07, 17:12
Én is úgy gondoltam, hogy azért itt a forgatónyomaték értékek átestek kis optikai-tuningon, de ha a fele igaz, az már nekem jó lehet.
Egy HBM45 manuális maróra akasztanám őket, mert már unalmas a tekergetés. :-)
A kérdésem arra irányult elsősorban, hogy van-e esetleg gyakorlati tapasztalata valakinek ezekkel. Alapból nem drága, de ha nem működik jól, vagy halványlila amperszag kíséretében eltávoznak az alkatrészek, akkor nem annyira olcsó. :-)
Amennyiben nincs tapasztalat, akkor rendelek egy szettet és majd kiderül, hogy mit is tud valójában.
Egy HBM45 manuális maróra akasztanám őket, mert már unalmas a tekergetés. :-)
A kérdésem arra irányult elsősorban, hogy van-e esetleg gyakorlati tapasztalata valakinek ezekkel. Alapból nem drága, de ha nem működik jól, vagy halványlila amperszag kíséretében eltávoznak az alkatrészek, akkor nem annyira olcsó. :-)
Amennyiben nincs tapasztalat, akkor rendelek egy szettet és majd kiderül, hogy mit is tud valójában.
Cím: Re:Léptetőmotor
Írta: istvan3 Dátum 2014 május 07, 17:34
Írta: istvan3 Dátum 2014 május 07, 17:34
Ne felejtsd még a 27% áfát plusz vámot, ha nem tévedek, ezt még rárakják a határnál.
Cím: Re:Léptetőmotor
Írta: wm94bppdn Dátum 2014 május 07, 17:39
Írta: wm94bppdn Dátum 2014 május 07, 17:39
Ár + szállítás a vám alapja, majd a vámmal növelt értéket szorozzák 1.27-tel (ÁFA). A vám is adó, azt is megadőztatják...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 május 07, 17:43
Írta: 000000000 Dátum 2014 május 07, 17:43
Igen, így lenne, ha nem a németországi raktárból jönne! :-)
Cím: Re:Léptetőmotor
Írta: Devecz Miklós Dátum 2014 május 07, 19:49
Írta: Devecz Miklós Dátum 2014 május 07, 19:49
Olvasd vissza a visszajelzések között a negatívokat. Általában azért kapja, mert az csak egy dolog, hogy németből jön.
Cím: Re:Léptetőmotor
Írta: 2dbfy8y Dátum 2014 május 07, 20:21
Írta: 2dbfy8y Dátum 2014 május 07, 20:21
Ma tesztelgettem ismét.
Áramon tudtam állítani, de nem javult semmit.
Elég dadogva is jár, meg nincs ereje.
Lehet kevés neki az a 24V-os toroid?
Vagy ilyent okozhat a nem megfelelő pc is.
Jelen pillanatban egy laptopról próbálgattam, ennek a driver testje nem igazán szép.
Áramon tudtam állítani, de nem javult semmit.
Elég dadogva is jár, meg nincs ereje.
Lehet kevés neki az a 24V-os toroid?
Vagy ilyent okozhat a nem megfelelő pc is.
Jelen pillanatban egy laptopról próbálgattam, ennek a driver testje nem igazán szép.
Cím: Re:Léptetőmotor
Írta: 279nwbpsa Dátum 2014 május 07, 20:36
Írta: 279nwbpsa Dátum 2014 május 07, 20:36
Szia!
Amatőr a #4404-ben linkelte a vezérlő doksiját.
Érdemes lenne átnézned alaposabban.Benne van a potival kapcsolatos kérdésedre és a némításra is a válasz.Jobbat,többet én magam bizonyosan nem tudnék mondani...
A dobozoláson(előlapon)jelölve vannak a tengelyek(X-Y-Z),aránylag könnyen visszanézhető,melyik megy a nyák A-B-C pontjára,így aztán be tudod állítani az áramot.
Elképzelhető,hogy nem az eredeti sorrendben csatlakoztattátok a motorokat?Az biztos,hogy a legnagyobb moci,az Y tengelyhez tartozott,amikor még nálam volt használatban.
Aránylag sokáig használtam.Valóban sípolt és nem volt szélvész gyors vele a gépem,de olyan rendellenes működést nem tapasztaltam,mint amit írsz.
Mondjuk a sebességen egy,a mostaninál picit nagyobb feszültségű táp sokat segítene.
Nagyon szívesen segítenék többet,de elég régen használtam már azt a vezérlőt...
Amatőr a #4404-ben linkelte a vezérlő doksiját.
Érdemes lenne átnézned alaposabban.Benne van a potival kapcsolatos kérdésedre és a némításra is a válasz.Jobbat,többet én magam bizonyosan nem tudnék mondani...
A dobozoláson(előlapon)jelölve vannak a tengelyek(X-Y-Z),aránylag könnyen visszanézhető,melyik megy a nyák A-B-C pontjára,így aztán be tudod állítani az áramot.
Elképzelhető,hogy nem az eredeti sorrendben csatlakoztattátok a motorokat?Az biztos,hogy a legnagyobb moci,az Y tengelyhez tartozott,amikor még nálam volt használatban.
Aránylag sokáig használtam.Valóban sípolt és nem volt szélvész gyors vele a gépem,de olyan rendellenes működést nem tapasztaltam,mint amit írsz.
Mondjuk a sebességen egy,a mostaninál picit nagyobb feszültségű táp sokat segítene.
Nagyon szívesen segítenék többet,de elég régen használtam már azt a vezérlőt...
Cím: Re:Léptetőmotor
Írta: 279nwbpsa Dátum 2014 május 07, 20:41
Írta: 279nwbpsa Dátum 2014 május 07, 20:41
Hát,nem tudom,a pc hibás-e,de az tuti,hogy nálam ez a szett működött és elég soká.Érdemes lenne másik gépen is megpróbálni.
A 24V a max. sebességbe beleszólhat,más gondot nem hiszem,hogy okoz(én nem tapasztaltam)
A 24V a max. sebességbe beleszólhat,más gondot nem hiszem,hogy okoz(én nem tapasztaltam)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 május 07, 21:11
Írta: s7manbs8 Dátum 2014 május 07, 21:11
A bipolárishoz képes itt is egy nagyobb táp segít, akkor eléri azt a sebességet, amit lehet.
Cím: Re:Léptetőmotor
Írta: 2dbfy8y Dátum 2014 május 07, 21:21
Írta: 2dbfy8y Dátum 2014 május 07, 21:21
Kb mekkora tápig mehetek el?
Ez mennyit bír ki?
Ez mennyit bír ki?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 május 07, 22:37
Írta: s7manbs8 Dátum 2014 május 07, 22:37
Azt nem tudom, milyen FET-ek vannak benne, ha jól rémlik 100-V-osak, de lehet vagy 50-60 V-tal mehet az úgy gondolom, de ez nem tuti, csak vélemény.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2014 május 07, 22:49
Írta: PSoft Dátum 2014 május 07, 22:49
Olvassátok már el azt a qrva leírást,amit a gyártó 'anno mellékelt minden példányhoz!
© Amatőr,már linkelte a #4404-ben.
Pld. a motortápra azt írja,hogy:
"Maximális motor tápfeszültség : 50V,"
Cím: Re:Léptetőmotor
Írta: 2dbfy8y Dátum 2014 május 08, 08:03
Írta: 2dbfy8y Dátum 2014 május 08, 08:03
Köszönöm![#worship]
Hogy én ezt nem láttam benne.....
Túl szem előtt volt.
Hogy én ezt nem láttam benne.....
Túl szem előtt volt.
Cím: Re:Léptetőmotor
Írta: wvdn6us49 Dátum 2014 május 17, 14:31
Írta: wvdn6us49 Dátum 2014 május 17, 14:31
Sziasztok!
Szeretnék egy kis segítséget kérni. Elindítottam a marógépemet, sikerült végre beállítani és összehangolni a Mach3-as vezérlővel, tudom mozgatni mindegyik tengelyt, azonban az X és Y tengelyem mozgása elég nehézkes és rendellenes. Először azt hittem, hogy esetleg feszülnek a vezetők és emiatt nehezen tudja mozgatni a léptetőmotor, de aztán levettem a szíjat és úgy is elég érdekesen forog a motor. Léptető motor hiba?
Ezen a videón lehet hallani is különbséget, a Z irányba szépen jár, viszont a másik irányba szörnyű:
https://www.youtube.com/watch?v=rKkxT45Xrbg&feature=youtu.be
Ezen a videón pedig szíj nélkül, így is elég érdekes hangja van (bár ezen a videón nem jön át annyira):
https://www.youtube.com/watch?v=4Vm3V-1y-pg&feature=youtu.be
Volt esetleg valakinek már hasonló problémája?
A segítséget előre is köszönöm!!
Szeretnék egy kis segítséget kérni. Elindítottam a marógépemet, sikerült végre beállítani és összehangolni a Mach3-as vezérlővel, tudom mozgatni mindegyik tengelyt, azonban az X és Y tengelyem mozgása elég nehézkes és rendellenes. Először azt hittem, hogy esetleg feszülnek a vezetők és emiatt nehezen tudja mozgatni a léptetőmotor, de aztán levettem a szíjat és úgy is elég érdekesen forog a motor. Léptető motor hiba?
Ezen a videón lehet hallani is különbséget, a Z irányba szépen jár, viszont a másik irányba szörnyű:
https://www.youtube.com/watch?v=rKkxT45Xrbg&feature=youtu.be
Ezen a videón pedig szíj nélkül, így is elég érdekes hangja van (bár ezen a videón nem jön át annyira):
https://www.youtube.com/watch?v=4Vm3V-1y-pg&feature=youtu.be
Volt esetleg valakinek már hasonló problémája?
A segítséget előre is köszönöm!!
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 május 17, 15:10
Írta: s7manbs8 Dátum 2014 május 17, 15:10
Ezt a rossz motorodat tedd rá arra a vezérlőre, amelyiken szép a hangja a másiknak, ha akkor is csúnya a hangja, akkor a motor rossz, ha nem, akkor meg valami zavar van abban a vezérlőben.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 május 17, 15:11
Írta: s7manbs8 Dátum 2014 május 17, 15:11
A zavara lehet fizikailag is valami elektromos jel vagy pedig a léptető impulzus nem elég hosszú a vezérlő programban beállításban pl. olyan is lehet.
Cím: Re:Léptetőmotor
Írta: xfg6v697j Dátum 2014 május 17, 16:36
Írta: xfg6v697j Dátum 2014 május 17, 16:36
Ha nyolcvezetékes a motorod,akkor el is lehet kötve.
Cím: Re:Léptetőmotor
Írta: a86ifm7g5 Dátum 2014 május 17, 17:47
Írta: a86ifm7g5 Dátum 2014 május 17, 17:47
Milyen vezérlőt használsz?
Nekem pontosan volt ilyen jellegű tapasztalatom, TB6560-as vezérlővel. Ha a step jelet low active zöld pipába tettem, akkor csinált ilyen jellegzetes hangot, és tévesztett is. Ha a low active piros X volt, akkor hibátlanul futott szépen simán.
Ha optikai leválasztott vezérlőd van (pl MSD), akkor ott teljesen mindegy, hogy a low active milyen beállításban van, mindkét módban szép egyenletes járása lesz a motornak.
Hasonlítsd össze a Z tengelybeállításait a többivel.
Nekem pontosan volt ilyen jellegű tapasztalatom, TB6560-as vezérlővel. Ha a step jelet low active zöld pipába tettem, akkor csinált ilyen jellegzetes hangot, és tévesztett is. Ha a low active piros X volt, akkor hibátlanul futott szépen simán.
Ha optikai leválasztott vezérlőd van (pl MSD), akkor ott teljesen mindegy, hogy a low active milyen beállításban van, mindkét módban szép egyenletes járása lesz a motornak.
Hasonlítsd össze a Z tengelybeállításait a többivel.
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2014 május 17, 19:11
Írta: besirkyjh Dátum 2014 május 17, 19:11
Szia
A vezérlöröl és a léptetöröl és a táprol és az LPT illesztöröl is kellene még adat .
Tápfeszültségre illetve fázis áramra tippelek .
Irj több adatot .
A vezérlöröl és a léptetöröl és a táprol és az LPT illesztöröl is kellene még adat .
Tápfeszültségre illetve fázis áramra tippelek .
Irj több adatot .
Cím: Re:Léptetőmotor
Írta: wvdn6us49 Dátum 2014 május 18, 15:15
Írta: wvdn6us49 Dátum 2014 május 18, 15:15
Igen TB6560-as vezérlőm van, akkor majd megpróbálom ezt a low active beállítást :) csak közben elszállt egy IC a vezérlőben, úgyhogy előbb szervízelni kell...
Köszi
Köszi
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2014 május 18, 15:59
Írta: besirkyjh Dátum 2014 május 18, 15:59
Szia
Ok nékül nem szál el egyik sem .Ird le amit kértem és megelőzzük a bajt :)
Ok nékül nem szál el egyik sem .Ird le amit kértem és megelőzzük a bajt :)
Cím: Re:Léptetőmotor
Írta: x0bnhi5ag Dátum 2014 május 25, 15:20
Írta: x0bnhi5ag Dátum 2014 május 25, 15:20
Tisztelt Uraim!
A klaviotól vásároltam két db egyforma ISS 57 typ léptetőmotort integrált vezérléssel és enkoderes visszacsatolással. Összekötöttem őket egy vékony dróttal, ellentétes forgásirány mellett hajtottam meg valamilyen gyorsabb részeket is tartalmazó G -coddal.Kiválóan együtt futnak, nagyon dinamikusak, csak ajánlani tudom.
Video: https://www.youtube.com/watch?v=wypyhhnjBdA
A klaviotól vásároltam két db egyforma ISS 57 typ léptetőmotort integrált vezérléssel és enkoderes visszacsatolással. Összekötöttem őket egy vékony dróttal, ellentétes forgásirány mellett hajtottam meg valamilyen gyorsabb részeket is tartalmazó G -coddal.Kiválóan együtt futnak, nagyon dinamikusak, csak ajánlani tudom.
Video: https://www.youtube.com/watch?v=wypyhhnjBdA
Cím: Re:Léptetőmotor
Írta: y9au2mspr Dátum 2014 június 03, 22:01
Írta: y9au2mspr Dátum 2014 június 03, 22:01
Üdv mindenkinek. A mai napon bekötöttem a meghajtókat a motorokba. Továbbá a hdbb2-t is áram alá helyeztem. Mikor bekapcsolat a két MSDD-80-5.6-ra csatlakoztatott motorok halkan,de búgónak tűnő sziszegő hangot hallatnak. A 7.8A 80V DM860 meghajtóra szerelt motor viszont néma csendben van. Ha a motorokat megcserélem a két meghajtó típusnál akkor is csak az előzőnél jelentkeznek a tünetek. Ez normális lehet? A UC300-5LPT még nem került betáplálásra 5v táp hiánya végett. üdv Szabolcs
Cím: Re:Léptetőmotor
Írta: besirkyjh Dátum 2014 június 03, 22:25
Írta: besirkyjh Dátum 2014 június 03, 22:25
Szia
Ha tényleg DD-s a vezérlöd akkor elöbb tanitsd be a motorhoz ( SW4 -el ) utánna valoszinü elhalgat .
Ha tényleg DD-s a vezérlöd akkor elöbb tanitsd be a motorhoz ( SW4 -el ) utánna valoszinü elhalgat .
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2014 június 03, 22:27
Írta: ANTAL GÁBOR Dátum 2014 június 03, 22:27
Azt hiszem nekem is volt hasonlóm a DD ( digitális ) meghajtónál de az autótuninggal megszünt. Csináltál autótuningot ?
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2014 június 03, 22:48
Írta: istvan58 Dátum 2014 június 03, 22:48
Én is ilyen vezérlőket használok, halk sistergés mindég lesz de nem gond.
Cím: Re:Léptetőmotor
Írta: y9au2mspr Dátum 2014 június 04, 19:42
Írta: y9au2mspr Dátum 2014 június 04, 19:42
Köszönöm a válaszokat. Akkor egyenlőre hagyom. Az SW4 -nem segített.
Cím: Re:Léptetőmotor
Írta: 80n6rakth Dátum 2014 június 19, 19:42
Írta: 80n6rakth Dátum 2014 június 19, 19:42
Sziasztok! Van egy KH42JM2B140C 6 kivezetéses unipoláris léptetőmotorom. Gyártottak ebből sima bipolárisat is. Az lenne a kérdésem, hogy a 2 közt csak annyi a különbség, hogy az enyémnek van 1-1 kivezetése a féltekercsnél? Ha sorosan kötöm be akkor ugyan azt fogja tudni mint a bipoláris változat? Jól tudom, hogy ha fél tekercset kötök csak be akkor nagyobb nyomaték és kisebb sebesség érhető el?
Cím: Re:Léptetőmotor
Írta: keri Dátum 2014 június 19, 19:54
Írta: keri Dátum 2014 június 19, 19:54
Cím: Re:Léptetőmotor
Írta: Sz.József Dátum 2014 június 19, 20:43
Írta: Sz.József Dátum 2014 június 19, 20:43
"Jól tudom, hogy ha fél tekercset kötök csak be akkor nagyobb nyomaték és kisebb sebesség érhető el?"
Szerintem ha kihagyod a közepét, akkor igaz ez az állítás...
Féltekercsnél pont fordítva van.
Nagyobb sebesség, kisebb nyomaték.
Szerintem ha kihagyod a közepét, akkor igaz ez az állítás...
Féltekercsnél pont fordítva van.
Nagyobb sebesség, kisebb nyomaték.
Cím: Re:Léptetőmotor
Írta: vvvsmkgjx Dátum 2014 június 19, 20:50
Írta: vvvsmkgjx Dátum 2014 június 19, 20:50
Sziasztok!
Léptető motor méretezéshez keresek anyagokat. Amiket a fórumon találtam már halott link alatt futottak. :( Elég régen volt róla szó. Ha van valakinek ehhez kapcsolódóan segédlete, az ossza már meg egy szegény hobbystával akár magánban. :)
Léptető motor méretezéshez keresek anyagokat. Amiket a fórumon találtam már halott link alatt futottak. :( Elég régen volt róla szó. Ha van valakinek ehhez kapcsolódóan segédlete, az ossza már meg egy szegény hobbystával akár magánban. :)
Cím: Re:Léptetőmotor
Írta: 80n6rakth Dátum 2014 június 20, 08:50
Írta: 80n6rakth Dátum 2014 június 20, 08:50
Itt írnak indoklást, leginkább arra voltam kíváncsi, hogy ami motorokat vettem tudják-e ugyan azt produkálni, mint a bipoláris társaik.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2014 június 20, 16:26
Írta: svejk Dátum 2014 június 20, 16:26
Cím: Re:Léptetőmotor
Írta: vvvsmkgjx Dátum 2014 június 21, 11:54
Írta: vvvsmkgjx Dátum 2014 június 21, 11:54
köszönöm, megprobalom hasznositani. De ahogy belenéztem, nem lesz egyszerű. :-)
Cím: Re:Léptetőmotor
Írta: yy2yggmv7 Dátum 2014 június 29, 06:25
Írta: yy2yggmv7 Dátum 2014 június 29, 06:25
Megosztok veletek egy kis tapasztalatot TB6560-as vezérlőkkel kapcsolatban,amiket e-Bay-en rendeltem,( alul a vezérlő linkje )nagyon olcsók voltak de hát van egy mondás ugye.
3 db-ot rendeltem, egy működött kettő csak erőlködött , úgy csináltak mint mikor túl nagy fordulatot állítunk és el akarnak indulni de mindig befékeződnek.
Hamar észrevettem , hogy a 7-es lábra és a testre kötött oszcillátor smd kondik nem ugyanolyanok abban ami jó, és amik rosszak , vagyik a kedves kínai niggerek elültették.
A jóban fehér színű (100pf volt) a rosszakban barnás ami lehet, hogy 100nf? de ezt nem tudom nem mértem meg.A igénytelenül meózott vezérlők igényesen be voltak csomagolva antisztetikus zacsikban. Azért közöltem ezt mert hátha más is így jár és nem kell mindjárt a kukába dobni.
Egyébként tök jó a vezérlő sokféle áramot, pihentető áramot lehet állítani, a step bemenetén 6N137-van.
http://www.ebay.com/itm/TB6560-3A-Driver-Board-CNC-Router-1-Axis-Controller-Stepper-Motor-Driver-Board-/301141432876?pt=LH_DefaultDomain_2&hash=item461d6d9a2c
3 db-ot rendeltem, egy működött kettő csak erőlködött , úgy csináltak mint mikor túl nagy fordulatot állítunk és el akarnak indulni de mindig befékeződnek.
Hamar észrevettem , hogy a 7-es lábra és a testre kötött oszcillátor smd kondik nem ugyanolyanok abban ami jó, és amik rosszak , vagyik a kedves kínai niggerek elültették.
A jóban fehér színű (100pf volt) a rosszakban barnás ami lehet, hogy 100nf? de ezt nem tudom nem mértem meg.A igénytelenül meózott vezérlők igényesen be voltak csomagolva antisztetikus zacsikban. Azért közöltem ezt mert hátha más is így jár és nem kell mindjárt a kukába dobni.
Egyébként tök jó a vezérlő sokféle áramot, pihentető áramot lehet állítani, a step bemenetén 6N137-van.
http://www.ebay.com/itm/TB6560-3A-Driver-Board-CNC-Router-1-Axis-Controller-Stepper-Motor-Driver-Board-/301141432876?pt=LH_DefaultDomain_2&hash=item461d6d9a2c
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2014 augusztus 30, 13:43
Írta: KBalázs Dátum 2014 augusztus 30, 13:43
Biztos banális a kérdésem: jól tudom, hogy 8 kivezetéses, unipoláris létptecset bipolárisként, párhuzamos tekercses bekötésnél, a névleges áram max. 1.4x -esével szababd meghajtani? (vagy nem?) Ezt termikus megfontolásból, vagy valami más ok is van?
Cím: Re:Léptetőmotor
Írta: designr Dátum 2014 augusztus 30, 17:42
Írta: designr Dátum 2014 augusztus 30, 17:42
Általában az ilyen motorok adatlapján is részletezik a hajtási,és bekötési módhoz tartozó névleges áramot.Ha kevesebb áramot kap,nem hozod ki belőlle a maximumot,ha többel,valószínűleg melegedni fog..
Cím: Re:Léptetőmotor
Írta: keri Dátum 2014 augusztus 30, 20:02
Írta: keri Dátum 2014 augusztus 30, 20:02
igen.
Bár pontos számokat ne várjál tőlem, de kb így van.
Amúgy meg én mindig úgy kalibrálom a motor áramot, hogy hőmérővel nézem, hosszú munkánál mennyire melegszik. Kb. 60 fokra szoktam belőni...bár most az esztergámon 70 fokig is felmegy.
Bár pontos számokat ne várjál tőlem, de kb így van.
Amúgy meg én mindig úgy kalibrálom a motor áramot, hogy hőmérővel nézem, hosszú munkánál mennyire melegszik. Kb. 60 fokra szoktam belőni...bár most az esztergámon 70 fokig is felmegy.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2014 november 15, 10:54
Írta: Szalai György Dátum 2014 november 15, 10:54
Minden hibrid léptetőmotor tengelye korrózióálló anyagból készül?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2014 november 15, 11:09
Írta: svejk Dátum 2014 november 15, 11:09
Nem tudom, de én már találkoztam jó rozsdás tengelyű mocival.
De vajon miért érdekes a kérdés? Mágnesezhetőség?
De vajon miért érdekes a kérdés? Mágnesezhetőség?
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2014 november 15, 11:31
Írta: Szalai György Dátum 2014 november 15, 11:31
Pontosan.
A forgórész felépítéséből eredően, a mágnesesen vezető anyagú tengely söntöt képez az axiálisan polarizált mágnesgyűrű két pólusa között.
Vagy hogy van ez?
A forgórész felépítéséből eredően, a mágnesesen vezető anyagú tengely söntöt képez az axiálisan polarizált mágnesgyűrű két pólusa között.
Vagy hogy van ez?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2014 november 15, 12:57
Írta: svejk Dátum 2014 november 15, 12:57
Hmm...
Nézzük az alapesetet, amikor a két egymástól eltolt ricnijű kötegelt lemeztárcsa közt van egy vékony tárcsa alakú mágnes.
A tárcsamágnes ugye axiálisan polarizálva.
Az erővonalak úgy záródnak, hogy a mágnes egyik oldala - ricnis lemezköteg - a köteg külső palástja - állórész vastest - másik ricnis tárcsa - mágnesgyűrű.
Hogy a lágyvas tárcsákból miért nem a tengely felé akarnak menni az erővonalak azt nem tudom.
Még sosem nyomtam ki tengelyt a forgórészből.
Talán a tengely és a lágyvas közt van valami nem mágnesezhető gyűrű?
Nézzük az alapesetet, amikor a két egymástól eltolt ricnijű kötegelt lemeztárcsa közt van egy vékony tárcsa alakú mágnes.
A tárcsamágnes ugye axiálisan polarizálva.
Az erővonalak úgy záródnak, hogy a mágnes egyik oldala - ricnis lemezköteg - a köteg külső palástja - állórész vastest - másik ricnis tárcsa - mágnesgyűrű.
Hogy a lágyvas tárcsákból miért nem a tengely felé akarnak menni az erővonalak azt nem tudom.
Még sosem nyomtam ki tengelyt a forgórészből.
Talán a tengely és a lágyvas közt van valami nem mágnesezhető gyűrű?
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2014 november 15, 13:50
Írta: Szalai György Dátum 2014 november 15, 13:50
Szög egyszerű léptetőmotor, és szöget üt a fejembe.
Én már ütöttem szét vagy kettőt, de a tengely és a lemezelt rücnisvas között természetesen nem volt a mágneses erővonalakat szigetelő anyag.
(Sem az erővonalakat a tengelyből kiszorító szupravezető diamágnes, sem valami térgörbítés technológia.) [#vigyor2]
Szóval akkor miért nem söntöl a tengely?
Én már ütöttem szét vagy kettőt, de a tengely és a lemezelt rücnisvas között természetesen nem volt a mágneses erővonalakat szigetelő anyag.
(Sem az erővonalakat a tengelyből kiszorító szupravezető diamágnes, sem valami térgörbítés technológia.) [#vigyor2]
Szóval akkor miért nem söntöl a tengely?
Cím: Re:Léptetőmotor
Írta: Dakota25 Dátum 2014 november 15, 14:00
Írta: Dakota25 Dátum 2014 november 15, 14:00
Nem úgy működik a rendszer, mint a körmös forgórészű generátorok tere? A tengely tulajdonképp a "mágnes részévé válik"?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2014 november 15, 14:07
Írta: svejk Dátum 2014 november 15, 14:07
Biztos rém egyszerű a magyarázat de én sajnos nem tudom.
Ráadásul még egy fabatka léptetőmotorom sincs, amit gyorsan szétvernék. [#rinya]
Ráadásul még egy fabatka léptetőmotorom sincs, amit gyorsan szétvernék. [#rinya]
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2014 november 15, 14:12
Írta: svejk Dátum 2014 november 15, 14:12
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2014 november 15, 14:15
Írta: svejk Dátum 2014 november 15, 14:15
Antal Gábor valószínű tudja kapásból, Ő eléggé otthon van a mágnesek terén.
Ha nem, akkor meg tudja kitől kell megkérdezni.
Várjuk meg...
Ha nem, akkor meg tudja kitől kell megkérdezni.
Várjuk meg...
Cím: Re:Léptetőmotor
Írta: Dakota25 Dátum 2014 november 15, 14:56
Írta: Dakota25 Dátum 2014 november 15, 14:56
...mégsem:
"A hibrid léptetőmotor egy lemezelt, fogazott lágyvas állórészből, valamint DIAMÁGNESES TENGELYBŐL, a tengelyre húzott gyűrű alakú állandó mágnesből és erre húzott, fogazott lágyvas forgórészből áll."
/http://www.tankonyvtar.hu/hu/tartalom/tamop412A/2010-0017_49_elektrotechnika_II/ch07s02.html/
"A hibrid léptetőmotor egy lemezelt, fogazott lágyvas állórészből, valamint DIAMÁGNESES TENGELYBŐL, a tengelyre húzott gyűrű alakú állandó mágnesből és erre húzott, fogazott lágyvas forgórészből áll."
/http://www.tankonyvtar.hu/hu/tartalom/tamop412A/2010-0017_49_elektrotechnika_II/ch07s02.html/
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2014 november 15, 15:04
Írta: svejk Dátum 2014 november 15, 15:04
Hmm....
Voltak HYxxxx nevű 6-8 Nm-es motorjaim, azok közt tuti volt rozsdás tengelyű...
No de már rég volt, az is lehet rosszul emlékszem.
Voltak HYxxxx nevű 6-8 Nm-es motorjaim, azok közt tuti volt rozsdás tengelyű...
No de már rég volt, az is lehet rosszul emlékszem.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2014 november 15, 15:07
Írta: ANTAL GÁBOR Dátum 2014 november 15, 15:07
Valami gyártástechnológiai oka lehet.Minthogy motorokat általában AlNi Co mágnessel szerelik és azokat később ütik be. Szét kellene szedni egy neodímium mágnessel szerelt léptecset. Lehet ott vas a tengely
Ha építünk egy statikus mágneses szeparátort akkor az egymás mellé sorolt váltakozó polaritású mágneseket vastag erővonal vezető vaslapra ( dobra ) szereljük hogy megkönnyítsük a mágneses erő kifejtésében nem hasznosuló erővonalak rövid úton való záródását. De ha megnéztek egy pot ( fazék) rögzítőmágnest akkor a háta vas . Tehát a mágneses shunt az rossz felvetés
Ha építünk egy statikus mágneses szeparátort akkor az egymás mellé sorolt váltakozó polaritású mágneseket vastag erővonal vezető vaslapra ( dobra ) szereljük hogy megkönnyítsük a mágneses erő kifejtésében nem hasznosuló erővonalak rövid úton való záródását. De ha megnéztek egy pot ( fazék) rögzítőmágnest akkor a háta vas . Tehát a mágneses shunt az rossz felvetés
Cím: Re:Léptetőmotor
Írta: Dakota25 Dátum 2014 november 15, 15:37
Írta: Dakota25 Dátum 2014 november 15, 15:37
A vas elég hamar telítődik... lehet, ennyi söntveszteség belefért annál.
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2014 november 15, 16:45
Írta: Rabb Ferenc Dátum 2014 november 15, 16:45
Csak úgy kíváncsiságból megmutattam egy bikaerős neodímium mágnest a fiókokban fellelhető összes léptetőmotor tengelyének. Egyik sem mutatott semmi érdeklődést iránta...
Bár lehet, hogy a felmérésem nem tekinthető perdöntőnek, mert nem próbáltam ki a világ összes léptecsével [#nemtudom]
Bár lehet, hogy a felmérésem nem tekinthető perdöntőnek, mert nem próbáltam ki a világ összes léptecsével [#nemtudom]
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2014 november 15, 16:52
Írta: svejk Dátum 2014 november 15, 16:52
Akkor talán meg is van válaszolva a #4451.
Köszönjük! [#worship]
Köszönjük! [#worship]
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2014 november 15, 16:58
Írta: Rabb Ferenc Dátum 2014 november 15, 16:58
Dakota25 által belinkelt tankönyv már megválaszolta. Én a kis kiványcsi csak kipróbáltam, hogy igazat írnak-e
Cím: Re:Léptetőmotor
Írta: Dakota25 Dátum 2014 november 15, 17:04
Írta: Dakota25 Dátum 2014 november 15, 17:04
... a 4452 viszont nincs.
a. nem hibrid motor
b. felszíni széndiffúzió az idők során megváltoztatta a felszín szerkezetét
a. nem hibrid motor
b. felszíni széndiffúzió az idők során megváltoztatta a felszín szerkezetét
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2014 november 15, 17:16
Írta: svejk Dátum 2014 november 15, 17:16
a - a nevében is szerepelt a hybrid
b - valószínűleg csak rosszul emlékeztem
b - valószínűleg csak rosszul emlékeztem
Cím: Re:Léptetőmotor
Írta: Dakota25 Dátum 2014 november 15, 17:17
Írta: Dakota25 Dátum 2014 november 15, 17:17
:-)
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2014 november 15, 17:34
Írta: Szalai György Dátum 2014 november 15, 17:34
Akkor a válasz igen. Nikkeltartalmú, ausztenites, nem mágnesezhető ötvözet.
Diamágneses, nem gyűjti magába az erővonalakat, hanem éppen kissé kiszorítja azokat.
Ha ferromágneses volna, akkor söntöt képezne.
Mindenkinek köszi.
Diamágneses, nem gyűjti magába az erővonalakat, hanem éppen kissé kiszorítja azokat.
Ha ferromágneses volna, akkor söntöt képezne.
Mindenkinek köszi.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2014 november 15, 17:50
Írta: ANTAL GÁBOR Dátum 2014 november 15, 17:50
Érdekes hogy az én beírásomat nem is erősíti meg senki és nem is cáfolja . Ha valakinek van a birtokában neodímium mágnessel szerelt léptecs akkor meg kellene nézni a tengelyt
Svejknek rémlik hogy rozsdás volt egy modernebb tehát akár neodímiumos mágnessel szerelt léptecs tengelye ( a neodímium mágneseket előre felmágnesezik és úgy teszik be a forgórészbe az AlNiCo mágnesekkel szerelteket pedig a készre szerelt forgórésszel együtt egy készülékben mágnesezik föl . Szerintem pont a felmágnesezésnél nem lehet vas a tengely mert akkor a beütés gyengébb lenne ( a beütésnél az kell hogy az erővonalak az ALNiCo testen menjenek keresztül
Svejknek rémlik hogy rozsdás volt egy modernebb tehát akár neodímiumos mágnessel szerelt léptecs tengelye ( a neodímium mágneseket előre felmágnesezik és úgy teszik be a forgórészbe az AlNiCo mágnesekkel szerelteket pedig a készre szerelt forgórésszel együtt egy készülékben mágnesezik föl . Szerintem pont a felmágnesezésnél nem lehet vas a tengely mert akkor a beütés gyengébb lenne ( a beütésnél az kell hogy az erővonalak az ALNiCo testen menjenek keresztül
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2014 november 15, 17:54
Írta: ANTAL GÁBOR Dátum 2014 november 15, 17:54
És még annyit hogy a léptecsek zöme még AlNiCo val készülnek. Nekem van egy olyanom ami neodímiumos ( a gyári adatlapja szerint ) Ha leégetem akkor választ kaphatunk a kérdésre [#wink][#wink]
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2014 november 15, 17:58
Írta: istvan58 Dátum 2014 november 15, 17:58
most néztem meg az enyémeket, elvileg nedinium mégnesesek.
A tengelyt nem fogja a mágnes!
A tengelyt nem fogja a mágnes!
Cím: Re:Léptetőmotor
Írta: robroy007 Dátum 2014 november 15, 19:36
Írta: robroy007 Dátum 2014 november 15, 19:36
Ha leégetted már a mágnes is halovány lesz a melegtől
Ami tuti neodium mágnest jelent [#nevetes1]
Ami tuti neodium mágnest jelent [#nevetes1]
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2014 november 15, 20:30
Írta: Szalai György Dátum 2014 november 15, 20:30
Kiástam a nálam pihenő SmCo mágnesű nagyon iparit. Az sem ferromágneses tengelyű.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2014 november 15, 20:46
Írta: svejk Dátum 2014 november 15, 20:46
Én most már csak arra lennék kíváncsi, hogy hogy jutott eszedbe ez jó kis kérdés?
Majd 10 év alatt emlékeim szerint erről még nem volt szó.
Érdekes, hogy nem tűnt fel senkinek ez a dolog...
Majd 10 év alatt emlékeim szerint erről még nem volt szó.
Érdekes, hogy nem tűnt fel senkinek ez a dolog...
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2014 november 15, 22:17
Írta: Szalai György Dátum 2014 november 15, 22:17
Évek óta nem sikerül összekaparnom egy alkalmas, bolygókerekes hajtóművet, a 750W-os Yaskawa motoromra, fémmaráshoz.
Abból lehetne egy barátságos, kis tömegű és térfogatú, hatékony hobby marómű, fémekhez. Pár százas fordulat, elég nyomaték, kompakt felépítés, kevés zaj.
Viszont hányódik itt egy méretes Berger-Lahr ötfázisú hibrid léptetőmotor. Alacsony fordulat, sima futás, nagy nyomaték.
Gondoltam: Ha beledughatnék egy C20-ER16-150M szárat, még jó is lehetne valamire.
Csak hát az mágnesezhető.
Na, mindegy, majd alakul egyszer valami.
És hát igen, azért is írtam ide ezt a kérdést, mert ez még nem volt téma. Az újramágnesezés tárgyalásakor sem került szóba.
Abból lehetne egy barátságos, kis tömegű és térfogatú, hatékony hobby marómű, fémekhez. Pár százas fordulat, elég nyomaték, kompakt felépítés, kevés zaj.
Viszont hányódik itt egy méretes Berger-Lahr ötfázisú hibrid léptetőmotor. Alacsony fordulat, sima futás, nagy nyomaték.
Gondoltam: Ha beledughatnék egy C20-ER16-150M szárat, még jó is lehetne valamire.
Csak hát az mágnesezhető.
Na, mindegy, majd alakul egyszer valami.
És hát igen, azért is írtam ide ezt a kérdést, mert ez még nem volt téma. Az újramágnesezés tárgyalásakor sem került szóba.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2014 november 16, 09:10
Írta: svejk Dátum 2014 november 16, 09:10
Aha, értem.
A bolygómű kihajtótengelyére applikálnád a befogót? Szerintem nem nagyon lenne szerencsés mert a felépítéséből adódóan radiálisan nem nagyon terhelhetők, csak elöl van rövid távon csapágyazva.
Meg igazából kevés az a párszázas fordulat, manapság majd mindenki keményfémszerszámmal dolgozik már a hobbysták körében is.
Az AC szervo oké, a 750W is majd mindenre elég, de a robosztus precíz főorsócsapágyazás és a lehetőleg több fokozatú mechanikus hajtómű,- célszerűen szíj - alig kerülhető meg.
Én nagyon keveset marok, de az egyik pillanatban műanyagot a másikban acélt a harmadikban alut.
Csak kínlódok, mert az eredeti főorsó max. 2500-at tud, igaz azt 20 fokozatban, de ez a gép anno még a gyorsacélszerszámokhoz készült.
Így most még egy Perske motor van az eredeti főorsó oldalára fogatva, aluhoz és műanyaghoz.
No de szerintem tudod Te ezeket nagyon jól...
A bolygómű kihajtótengelyére applikálnád a befogót? Szerintem nem nagyon lenne szerencsés mert a felépítéséből adódóan radiálisan nem nagyon terhelhetők, csak elöl van rövid távon csapágyazva.
Meg igazából kevés az a párszázas fordulat, manapság majd mindenki keményfémszerszámmal dolgozik már a hobbysták körében is.
Az AC szervo oké, a 750W is majd mindenre elég, de a robosztus precíz főorsócsapágyazás és a lehetőleg több fokozatú mechanikus hajtómű,- célszerűen szíj - alig kerülhető meg.
Én nagyon keveset marok, de az egyik pillanatban műanyagot a másikban acélt a harmadikban alut.
Csak kínlódok, mert az eredeti főorsó max. 2500-at tud, igaz azt 20 fokozatban, de ez a gép anno még a gyorsacélszerszámokhoz készült.
Így most még egy Perske motor van az eredeti főorsó oldalára fogatva, aluhoz és műanyaghoz.
No de szerintem tudod Te ezeket nagyon jól...
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 november 30, 17:50
Írta: s7manbs8 Dátum 2014 november 30, 17:50
Nemrég próbáltam a 0.9 fokos Nema23 motorjaimat amik 6 kivezetésesek bipoláris vezérlővel hajtani, de az csak ide-oda ugrált, az 1.8 fokosak azok mennek így. Ennek van valami oka, vagy csak én bénáztam el valamit ?
Cím: Re:Léptetőmotor
Írta: 2dbfy8y Dátum 2014 november 30, 19:34
Írta: 2dbfy8y Dátum 2014 november 30, 19:34
Én ilyenekkel már szívtam eleget.
6 kivezetés 0.9fok, nagy szívás.
mikor megcsináltam 4-esre utána jó lett.
Igaz volt vele meló, fedél le,szétszedtem 8 vezetékre, utána közösítettem 4-re, és még ereje is lett.
5V 2.5A, kb mekkora NM? mocik lehetnek
6 kivezetés 0.9fok, nagy szívás.
mikor megcsináltam 4-esre utána jó lett.
Igaz volt vele meló, fedél le,szétszedtem 8 vezetékre, utána közösítettem 4-re, és még ereje is lett.
5V 2.5A, kb mekkora NM? mocik lehetnek
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 november 30, 21:38
Írta: s7manbs8 Dátum 2014 november 30, 21:38
Ezek konkrétan DC 6V és áram nincs ráírva, de az a szokásos 0.5Nm körüli lehet. Ereje van ennek, csak bipoláris vezérlőm lenne inkább, ami készen is van és nem akarnék most belegfogni vezérlőt építgetni unipoláris félét, illetve amik vannak, mert van oylanom is, ahhoz még kellene valamit csinálgatni forerasztgatni optót cserélni, vagy procit tenni programot írni, na most ehhez én nem kezdek az tuti, van elég más dolgom is.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 december 09, 00:41
Írta: s7manbs8 Dátum 2014 december 09, 00:41
Nekem ez elég furcsa, lehet rosszul emlékszem, hogy a 6 kivezetéses unipoláris motornál a bipoláris kötésnél az egybefüggő tekercs középső és egyik szélét kell bekötni én erre emlékszem, még a Magi féle ismertetője alapján, persze lehet tévedek. És még arra is emlékszem, hogy pont ezt egy hátránykén is említette, hogy emiatt, mivel csak fél tekercse van használva a kényszerű kompromisszum miatt, ezért kevesebb lesz a tartó ereje is, de a bipoláris mód miatt a végsebessége viszont megnő ... lehet csal a memóriám ?
Amúgy se értem, hogy ha az egyé tekercs van bekötve, akkor annak nem is szabad jól működni, mert a léptetési fázisa szerint egyik rész egyik pozícióba húzza a másik pedig 2 lépéssel arrébb, tehát itt valami nem stimmel szerinte, a 3D nyomtató topickban írjátok ezt a tanácsot, ami szerintem nem jól van úgy. De lehet tévedek, ha igen valami linkre emlékszik valaki, ahol ez meg van magyarázva ?
Amúgy se értem, hogy ha az egyé tekercs van bekötve, akkor annak nem is szabad jól működni, mert a léptetési fázisa szerint egyik rész egyik pozícióba húzza a másik pedig 2 lépéssel arrébb, tehát itt valami nem stimmel szerinte, a 3D nyomtató topickban írjátok ezt a tanácsot, ami szerintem nem jól van úgy. De lehet tévedek, ha igen valami linkre emlékszik valaki, ahol ez meg van magyarázva ?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 december 09, 00:42
Írta: s7manbs8 Dátum 2014 december 09, 00:42
Ha így is be lehet kötni, lehet hogy a 0.9 fokos motorjaim is mennének, ki tudja, mert az bipolárban bekötve fél tekercsesen csak ugrál ide oda, azt se értettem, lehet annál meg így lenne jó ki tudja.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 december 09, 00:48
Írta: s7manbs8 Dátum 2014 december 09, 00:48
Lehet nem is tévedek, csak akkor ha mindkét tekercs így megy, akkor a soros mód van használva, ami így nagyobb induktivitás kevesebb végsebesség, ahogy meg én kötöttem be, ott pedig a párhuzamost használom, csak mivel a tekercs végei közösek, így a másik tekercs rész nem köthető be, ezért lehet kissé gyengébb lesz csak a végsebessége viszont nagyobb, azonos feszültségű driver esetén.
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2014 december 09, 00:52
Írta: KBalázs Dátum 2014 december 09, 00:52
Ha a közép leágazástól nézel (képzeletben) a két szélsô leágazás felé, akkor az egyik felfelé, a másik ér lefelé indul el a csévetesten. Tehát középrôl nézve (megtáplálva általában U+) ezért az egyik tekercsrész ellentétesen húz mint a másik.
A legegyszerûbb megoldás nagyobb sebességre sarkallni a léptetôt (erre szólt a tanács, a régi menetesszáras világban a sebesség volt a gyenge láncszem), ha csak a fél tekercset használod, mivel így az induktivitása fele, cserébe persze a nyomaték is zuhan, mivel az áthajtható áram továbbra is ugyanannyi mint a két tekercs esetén (réz keresztmetszet) viszont csak fele annyi menet, azaz kisebb gerjesztés.
A legegyszerûbb megoldás nagyobb sebességre sarkallni a léptetôt (erre szólt a tanács, a régi menetesszáras világban a sebesség volt a gyenge láncszem), ha csak a fél tekercset használod, mivel így az induktivitása fele, cserébe persze a nyomaték is zuhan, mivel az áthajtható áram továbbra is ugyanannyi mint a két tekercs esetén (réz keresztmetszet) viszont csak fele annyi menet, azaz kisebb gerjesztés.
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2014 december 09, 00:54
Írta: KBalázs Dátum 2014 december 09, 00:54
Na mire leírtam leírtad magad is [#hehe]
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 december 09, 00:54
Írta: s7manbs8 Dátum 2014 december 09, 00:54
Aztán a soros kötésnél is mindegy, hogy az eleve közös tekercs pont jó irányban van e ? Mert ahogy nézem az unipolársi sorrendnéál az
1A
2A
1B
2B a jó sorrend, tehát ha az 1A...1B eleve közös tekercsre azonos áram irányt adunk, akkor más pozícióba akarja húzni, de mivel ha a két végére adunk feszültséget, és a közös kivezetést szabadon hagyjuk, akkor az áram irány pont ellentétes lesz, na meg is magyaráztam itt most magamnak, hogy miért jó úgy bekötni, hogy a két végét és a közepet szabadon hagyjuk.
OK, most már értem, akkor így viszont a nagyobb induktivitás miatt a végsebesség kisebb lesz, de mivel az egész tekercs működik kis sebességeken erősebb.
Akkor végkövetkeztetés, mindkettő jó, csak a felhasználástól függően érdemes vagy így, vagy úgy bekötni, pl. nagyobb sebesség érdekében és kis feszültségű driverről menve érdemes csak fél tekercset bekötni ha a nagy sebesség a lényeg ...
1A
2A
1B
2B a jó sorrend, tehát ha az 1A...1B eleve közös tekercsre azonos áram irányt adunk, akkor más pozícióba akarja húzni, de mivel ha a két végére adunk feszültséget, és a közös kivezetést szabadon hagyjuk, akkor az áram irány pont ellentétes lesz, na meg is magyaráztam itt most magamnak, hogy miért jó úgy bekötni, hogy a két végét és a közepet szabadon hagyjuk.
OK, most már értem, akkor így viszont a nagyobb induktivitás miatt a végsebesség kisebb lesz, de mivel az egész tekercs működik kis sebességeken erősebb.
Akkor végkövetkeztetés, mindkettő jó, csak a felhasználástól függően érdemes vagy így, vagy úgy bekötni, pl. nagyobb sebesség érdekében és kis feszültségű driverről menve érdemes csak fél tekercset bekötni ha a nagy sebesség a lényeg ...
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 december 09, 00:55
Írta: s7manbs8 Dátum 2014 december 09, 00:55
Magamtól rájöttem, ez a legjobb, elkezdtem gondolkodni a dologról ... :)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 december 09, 00:56
Írta: s7manbs8 Dátum 2014 december 09, 00:56
Ez kell nekem, pörögjön a menetes szár, mint a vesztés. :)
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2014 december 09, 00:57
Írta: KBalázs Dátum 2014 december 09, 00:57
De ha szétszedhető a motor (mármint a "kupakja", csapágyház), érdemes megnézni, hátha ki van vezetve mind a 8 ér belül, és ott párhuzamosra kötni.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2014 december 09, 09:24
Írta: keri Dátum 2014 december 09, 09:24
Pál kartárs 750W-os AC szervóval és asszem 1:3-as fogasszíjas hajtással mar 80-as átmérőjű marótárcsával is.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 december 13, 19:34
Írta: s7manbs8 Dátum 2014 december 13, 19:34
Berger lahr vrdm 5910/50 5 fázisú léptetőmotorhoz nehéz szerezni vezérlőt ? Építeni gondolom nem sok értelme lenne.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2014 december 19, 07:23
Írta: ANTAL GÁBOR Dátum 2014 december 19, 07:23
kíváncsi vagyok a kollégák véleményére. Lone Wolf írja hogy megint vannak nagy piros (svájci ) léptetői. Rákerestem az adatlapra és azt írják hogy nominal power 16.5watt . No ezt én korábban úgy értelmeztem hogy a motor teste képes a környezet felé lesugározni a 16.5 wattot ( Áll a motor és a tartóáram tartja a forgórészt. ) A motor névleges árama 4.7 A a tekercs ellenállása 0.37 ohm . Képzem a Inégyzet *R szorzatot 8.17 wattot kapok ( és a tartóáram a szorzatban 100 % kal van számolva ! ) Persze a motornak két fázis tekercse van de amikor áll akkor lehetetlen hogy mindkét fázistekercse 100 % ban gerjesztve legyen mert akkor nem lesz stabil a rotorpozíció.
Vagy a svájciak a forgás közbeni disszipált teljesítményt akarták megadni ? Itt is érvényes hogy egyszerre (folyamatosan) nincs gerjesztve mindkét tekercs (sőt az induktivitás miatt a felfutási áram átlagával kellene a disszipációt számolni a felfutási szakaszban ) Nézegetem a nyomaték - sebesség görbét . Alacsonyabb vezérlőfeszültség esetén kilövök két összetartozó pontot M= 1.2Nm at 1000pps ill M = 0.2Nm at 6000 pps. Kiszámolom a tengelyteljesítményt P = M*omega 1000pps az 1.8 fokos motornál 5 1/sec ami omegában 31.4 1/sec vagyis P = 37.7 watt .. Ugyanezt kapom a nagyobbik fordulaton . Tehát a megadott nominal power nem a tengelyteljesítmény ( és ezt is vártam ) De akkor micsoda ?
Vagy a svájciak a forgás közbeni disszipált teljesítményt akarták megadni ? Itt is érvényes hogy egyszerre (folyamatosan) nincs gerjesztve mindkét tekercs (sőt az induktivitás miatt a felfutási áram átlagával kellene a disszipációt számolni a felfutási szakaszban ) Nézegetem a nyomaték - sebesség görbét . Alacsonyabb vezérlőfeszültség esetén kilövök két összetartozó pontot M= 1.2Nm at 1000pps ill M = 0.2Nm at 6000 pps. Kiszámolom a tengelyteljesítményt P = M*omega 1000pps az 1.8 fokos motornál 5 1/sec ami omegában 31.4 1/sec vagyis P = 37.7 watt .. Ugyanezt kapom a nagyobbik fordulaton . Tehát a megadott nominal power nem a tengelyteljesítmény ( és ezt is vártam ) De akkor micsoda ?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2014 december 19, 08:08
Írta: 000000000 Dátum 2014 december 19, 08:08
"lehetetlen hogy mindkét fázistekercse 100 % ban gerjesztve legyen mert akkor nem lesz stabil a rotorpozíció."
Nagy tévedés, amit írtál, hiszen egész lépéses üzemmódban ez nem lehetetlen, hanem mindig igaz!
Így aztán a ~16.5 W is kijön, mint max. disszipációs P.
Nagy tévedés, amit írtál, hiszen egész lépéses üzemmódban ez nem lehetetlen, hanem mindig igaz!
Így aztán a ~16.5 W is kijön, mint max. disszipációs P.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2014 december 19, 08:19
Írta: Szalai György Dátum 2014 december 19, 08:19
Amikor kínálják, akkor csak tehetség kérdése, hogy menyire nehéz.
Az enyémek ilyenek.
https://www.google.hu/search?q=csd5814n&newwindow=1&biw=1280&bih=709&source=lnms&tbm=isch&sa=X&ei=a86TVMWdKoGTPJzVgJAD&ved=0CAcQ_AUoAg
Az enyémek ilyenek.
https://www.google.hu/search?q=csd5814n&newwindow=1&biw=1280&bih=709&source=lnms&tbm=isch&sa=X&ei=a86TVMWdKoGTPJzVgJAD&ved=0CAcQ_AUoAg
Cím: Re:Léptetőmotor
Írta: keri Dátum 2014 december 19, 08:21
Írta: keri Dátum 2014 december 19, 08:21
Stabil lesz akkor is ha két tekercs van bekapcsolva, csak a két vektor eredőjénél.
Gondolj csak a kereszt tekercses műszerekre.
Gondolj csak a kereszt tekercses műszerekre.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2014 december 19, 08:31
Írta: keri Dátum 2014 december 19, 08:31
Ritkán előfordul a használt piacon régi ipari vezérlő. Nekem van 3 darab felesleges 5 fázisú vezérlő panelem, de soha nem bírtam még működésre őket. Ezeknél a bekötési sorrend amit macerás kideríteni.
Ráadásul ennek nem tekercsenként 1 pár kivezetése van hanem csak öt. Vagyis vagy csillagba, vagy deltába kell kötni, és még a tekercs sorrend, vagy polaritás is kérdés...neked való móka :D Én inkább vettem egy olyat ami össze van rakva és működik.
Ha kell eladom neked, de szerintem jobban jársz ha veszel bármilyen kínai motort és vezérlőt, mert 2 fázisút. Vagy ha nagyon építeni akarsz, akkor miért nem szervóban gondolkodsz?
Ráadásul ennek nem tekercsenként 1 pár kivezetése van hanem csak öt. Vagyis vagy csillagba, vagy deltába kell kötni, és még a tekercs sorrend, vagy polaritás is kérdés...neked való móka :D Én inkább vettem egy olyat ami össze van rakva és működik.
Ha kell eladom neked, de szerintem jobban jársz ha veszel bármilyen kínai motort és vezérlőt, mert 2 fázisút. Vagy ha nagyon építeni akarsz, akkor miért nem szervóban gondolkodsz?
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2014 december 19, 08:39
Írta: ANTAL GÁBOR Dátum 2014 december 19, 08:39
Köszönöm Tibor és Keri . A vektoros magyarázattal korrekt...
Cím: Re:Léptetőmotor
Írta: m6j2vsrdz Dátum 2014 december 19, 08:46
Írta: m6j2vsrdz Dátum 2014 december 19, 08:46
Szalai Györgynek van egy nagyon jó gif-je: forgó vektorábra. Érdemes megkeresni [#vigyor2]
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2014 december 19, 08:52
Írta: Szalai György Dátum 2014 december 19, 08:52
Mekkora feszültségű és áramúak?
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2014 december 19, 08:57
Írta: Szalai György Dátum 2014 december 19, 08:57
Cím: Re:Léptetőmotor
Írta: m6j2vsrdz Dátum 2014 december 19, 09:11
Írta: m6j2vsrdz Dátum 2014 december 19, 09:11
Erre gondoltam. A különbség léptetőnél, hogy két vektor van, nem három. Az eredő vektor tehát lépésszögben "ugrál".
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 december 19, 09:24
Írta: s7manbs8 Dátum 2014 december 19, 09:24
Na, pont kérdezni akartam mintha neked lett volna ilyened valami.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2014 december 19, 09:27
Írta: s7manbs8 Dátum 2014 december 19, 09:27
Hát ez az , hogy a macera az nem hiányzik nekem se annyira. Most vagdalom ki az azt az 5 fázisú motort leváltó másik vagy szervó vagy léptetőre való átkonvertáláshoz szükséges paneleket, amire fel tudom szerelni az áttételt stb. meglátom úgy mire képes jó lesz e, az eredeti 5 fázisú motort meg ha egyszer nagyon ráérne az ember és egy ilyen vezérlővel meg tudná hajtani, azt is meg lehet majd próbálni, csak emez most sürgősebb lenne.
Cím: Re:Léptetőmotor
Írta: etc77f5nr Dátum 2014 december 19, 13:21
Írta: etc77f5nr Dátum 2014 december 19, 13:21
Nekem ilyen motorjaim vannak, az mondjuk érdekes, hogy elvileg a mach3 tartóáramon tartja a motorokat, ill a vezérlő (piros TB6560), de amikor állóhelyzetben van a kuplunkgál fogva kényelmesen eltudom forgatni kézzel, nyilván nem annyira kényelmesen, de nem kell megszakadjak, akkor ott nem max áram a tartóáram? Forgás közben nem tudom lefogni kézzel akkor nagyon erős. Mondjuk nincs is 4.7A-en hajtva csak 3A. Mlegedni így is durván melegszik szal a 16.5W-ot még talán keveslem is :) Kézzel 2mpig fogható 1-2 óra munka után, de után eléggé éget, pontosan nem tudom megmérni hány C° nincs lézeres hőmérőm multiméter kis érzékelőjét tapasztottam rá úgy volt 50C°környéke, ami elvileg nem túl meleg.
Cím: Re:Léptetőmotor
Írta: etc77f5nr Dátum 2014 december 19, 13:21
Írta: etc77f5nr Dátum 2014 december 19, 13:21
*kuplungnál
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2014 december 19, 14:14
Írta: Szalai György Dátum 2014 december 19, 14:14
Mérd csak meg, ha teheted. Lehet, hogy meglepődsz és nem is annyira meleg az, mint gondolod.
A 45C fokos motort már forrónak érzékeled, 50C felett pedig már fájdalmasan forrónak.
(Érdekes, hogy ha bekened a motort erős paprikával, akkor szobahőmérsékleten is forrónak érzed, mert a kapszaicin is aktiválja a forró receptoraidat.)
A motornak az 50C-fok még nem kánikula.
A 45C fokos motort már forrónak érzékeled, 50C felett pedig már fájdalmasan forrónak.
(Érdekes, hogy ha bekened a motort erős paprikával, akkor szobahőmérsékleten is forrónak érzed, mert a kapszaicin is aktiválja a forró receptoraidat.)
A motornak az 50C-fok még nem kánikula.
Cím: Re:Léptetőmotor
Írta: etc77f5nr Dátum 2014 december 19, 14:32
Írta: etc77f5nr Dátum 2014 december 19, 14:32
Szerintem is jó az 50C°de a tartóáram akkor is érdekes.
Cím: Re:Léptetőmotor
Írta: hostya Dátum 2014 december 19, 16:06
Írta: hostya Dátum 2014 december 19, 16:06
Mekkora tartóáram van beállítva a piros TB6560-on?
Én álló helyzetben is alig tudom elfordítani a 25mm átmérőjű kuplungon, pedig nekem csak 1,5Nm-es motorok vannak.
Én álló helyzetben is alig tudom elfordítani a 25mm átmérőjű kuplungon, pedig nekem csak 1,5Nm-es motorok vannak.
Cím: Re:Léptetőmotor
Írta: wcmwugefi Dátum 2014 december 19, 16:16
Írta: wcmwugefi Dátum 2014 december 19, 16:16
Sziasztok. Bocsánat, hogy itt is megkérdem. Tudna valaki segíteni az Elektronika topik #16076-os számú kérdésében? Előre is köszönöm! Attila
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2014 december 19, 16:26
Írta: ANTAL GÁBOR Dátum 2014 december 19, 16:26
nem minden hátsó gondolat nélkül tettem föl reggel a kérdést. Sok esetben a tartóáramot a névleges áram 60 % ára programozzuk no ilyenkor mivel a disszipált teljesítmény az áram négyzetével arányos ( 0.6*4.7 ) négyzet *0.37*2 = 5.88 watt lesz a fűtőteljesítmény .. A kezem szerint nekem is ( sokkal !!! ) melegebb . Majd megmérem korrektül a hőmérsékletet .Ha a tekercs melegellenállását a hideg ellenállással közelítem akkor egy kettősen integráló multiméterrel a fesz átlagát megmérve elvileg a disszipált teljesítmény számolható
Cím: Re:Léptetőmotor
Írta: etc77f5nr Dátum 2014 december 19, 16:45
Írta: etc77f5nr Dátum 2014 december 19, 16:45
100% vagyis elméletben 2.5A
Cím: Re:Léptetőmotor
Írta: keri Dátum 2014 december 19, 17:55
Írta: keri Dátum 2014 december 19, 17:55
Már régen szórakoztam vele akkor mértem, de már nem emlékszem
12V-ról játszottam vele.
2-3Amperes lehet.
Lefotóztam neked. kb. ennyit tudok én is róla.
12V-ról játszottam vele.
2-3Amperes lehet.
Lefotóztam neked. kb. ennyit tudok én is róla.
Cím: Re:Léptetőmotor
Írta: ebalint Dátum 2014 december 21, 10:58
Írta: ebalint Dátum 2014 december 21, 10:58
Szia!
Hány db van Neked ebből és kb. mennyi lenne?
/nekem 2 db motorom van 10 kivezetéssel, lehet jó lenne/
A PMM.. 5 fázisú, de az STK mintha nem az lenne ...
Hány db van Neked ebből és kb. mennyi lenne?
/nekem 2 db motorom van 10 kivezetéssel, lehet jó lenne/
A PMM.. 5 fázisú, de az STK mintha nem az lenne ...
Cím: Re:Léptetőmotor
Írta: f7pbhicb Dátum 2014 december 27, 12:21
Írta: f7pbhicb Dátum 2014 december 27, 12:21
Üdv,kellene nekem 3db 24v 3nm körüli 4 kivezetéses léptetőmotor akinek van az jelezze.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2014 december 27, 12:44
Írta: keri Dátum 2014 december 27, 12:44
Bocs, ez valahogy kimaradt.
3 darab van.
4ezerért vettem darabját itt a fórumon ugyan ebben az állapotban. Neked mennyit érne meg?
5 fázisú ez, nincs azzal gond, csak nincs hozzá a neten adatlap. Csak egy ilyen listát találtam, amiből kiderülnek a paraméterei.
3 darab van.
4ezerért vettem darabját itt a fórumon ugyan ebben az állapotban. Neked mennyit érne meg?
5 fázisú ez, nincs azzal gond, csak nincs hozzá a neten adatlap. Csak egy ilyen listát találtam, amiből kiderülnek a paraméterei.
Cím: Re:Léptetőmotor
Írta: u6p5jr23k Dátum 2015 január 24, 22:15
Írta: u6p5jr23k Dátum 2015 január 24, 22:15
Sziasztok!
Milyen árnyékolt kábelt használtok a motor bekötéséhez? Gondolom erenként árnyékolt kell.
Kösz!
Milyen árnyékolt kábelt használtok a motor bekötéséhez? Gondolom erenként árnyékolt kell.
Kösz!
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2015 január 24, 22:31
Írta: Rabb Ferenc Dátum 2015 január 24, 22:31
Én speciel semmilyet. Mezei 5x0,75-ös MTK vezeték megy a motorokhoz. Viszont az energialáncban mellette lévő végállás kapcsoló vezetéke az árnyékolt kéteres mikrofonkábel.
A motor nem kelt különösebben nagy zavart. Viszont az érzékeny bemenetek mindez elektromos zajra megőrülnek
A motor nem kelt különösebben nagy zavart. Viszont az érzékeny bemenetek mindez elektromos zajra megőrülnek
Cím: Re:Léptetőmotor
Írta: u6p5jr23k Dátum 2015 január 25, 16:43
Írta: u6p5jr23k Dátum 2015 január 25, 16:43
Köszönöm a választ.
Cím: Re:Léptetőmotor
Írta: remrendes Dátum 2015 január 29, 08:58
Írta: remrendes Dátum 2015 január 29, 08:58
Mitol lehet az, hogy 1-2 ev folyamatos hasznalat utan elgyengul a motor?
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2015 január 30, 06:14
Írta: Szalai György Dátum 2015 január 30, 06:14
Szerintem.
Ha névtelen gyártó alacsony minőségű terméke, akkor sajnos valószínűleg a forgórészbe épített mágnesgyűrű gyengülése miatt veszíti a nyomatékát. Neves motor ilyet megfőzve sem tesz.
(Csapágyhalál vagy csavarlazulás miatti forgórész súrlódás, az akadozó mozgást produkálna.)
Esetleg a motorvezérlő elektronika elhangolódása is okozhatja a motor nyomaték csökkenését. De gondolom a motoráramot ellenőrizted, mielőtt maga a motor vált gyanússá.
Ha névtelen gyártó alacsony minőségű terméke, akkor sajnos valószínűleg a forgórészbe épített mágnesgyűrű gyengülése miatt veszíti a nyomatékát. Neves motor ilyet megfőzve sem tesz.
(Csapágyhalál vagy csavarlazulás miatti forgórész súrlódás, az akadozó mozgást produkálna.)
Esetleg a motorvezérlő elektronika elhangolódása is okozhatja a motor nyomaték csökkenését. De gondolom a motoráramot ellenőrizted, mielőtt maga a motor vált gyanússá.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2015 január 30, 07:05
Írta: Szalai György Dátum 2015 január 30, 07:05
Az állandó mágnes, sajnos nem állandó erejű mágnes.
Idővel, hőmérséklettel, motor szétszedéssel, túlterheléssel, túl árammal gyengül.
Idővel, hőmérséklettel, motor szétszedéssel, túlterheléssel, túl árammal gyengül.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 január 30, 09:39
Írta: 000000000 Dátum 2015 január 30, 09:39
Történt olyan amire konkrét példa is van, hogy a motor tengely és a forgórész kezdet külön életet élni. (nem xar kínai, hanem egy Bautz motorral)
Amúgy meg a szakszerútlen szerelésből is adódhat motor gyengülés ha valaki állat módon felkalapálja a tengelyre a tengelykapcsolót.
Lehet nem azonnal ,következik be csak idővel szépen az elrepedt mágnesgyűrű szétrázódik így a mágneses tér elmegy manituhoz az örök vadászmezőkre.
Csatlakoznék Szalai György hozzászólásához a megfőzés gyanús motorhoz, mert ha kicsi a motor akkor adjunk neki áramot hagy égjen a zsír ahogy Rubint Réka is mondja [#hehe]
Ritka földfém alapú mágnesek (Nd2Fe14B) 80 °C körül már erősen kezdenek veszíteni a mágnesességükből.
És nem kell, hogy elérje ezt a hőmérsékletet, de ha évekig ennek a közelében van járatva azt nem fogja megköszönni!
Mellesleg nem csak a motor lehet a hiba hanem a karbantartás és a porvédő burkolatok és elszívás akkut hiánya is!
Mert a por bemegy mindenhova, megül a tengelyeken és gyönyörűségesen összegyűjtik a csapágyak a golyós vagy sima anyák.
Gondolom a többit nem kell magyarázni.
Cím: Re:Léptetőmotor
Írta: ra8nsmk6w Dátum 2015 január 30, 11:01
Írta: ra8nsmk6w Dátum 2015 január 30, 11:01
Még hozzátenném, hogy a látszólagos teljesítmény vesztés hátterében lehet a hajtott mechanika szorulása is. Nem nagy dolog a motor-motorok áramának figyelése amiből mindez kiszürhető.
Cím: Re:Léptetőmotor
Írta: ra8nsmk6w Dátum 2015 január 30, 11:05
Írta: ra8nsmk6w Dátum 2015 január 30, 11:05
Elnézést nem neked akartam cimezni. Ezt Te biztosan tudod[#pardon1]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 január 30, 11:29
Írta: 000000000 Dátum 2015 január 30, 11:29
Ezért írtam mint lehetséges tényezőként a por bejutását az olyan helyekre ahova nem kellene.
Léptetőmotor vezérlésnél meg nem fogod észrevenni a terhelt vagy a szabadon futó motor áramok közötti különbséget egy multiméterrel.
Cím: Re:Léptetőmotor
Írta: ra8nsmk6w Dátum 2015 január 30, 12:08
Írta: ra8nsmk6w Dátum 2015 január 30, 12:08
Amikor én léptetőt mértem annak 10 esztendeje. Mielött nagyon kiképződtem volna gyorsan abba is hagytam.(pedig igazán profi vezérlővel dolgoztam. Profi 1. nem fogom elfelejteni) Akkor az egyenáramú tápegységet mértem! nem közvetlenül a motor áramot, Fixen beépitett ampermérővel.
Cím: Re:Léptetőmotor
Írta: remrendes Dátum 2015 január 30, 15:57
Írta: remrendes Dátum 2015 január 30, 15:57
Fuji, nem kinai. Mechanikailag a szerkezetnek semmi gondja. Igazabol en csak tippeltem, hogy a magnes kezd benne gyengulni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 január 30, 16:11
Írta: 000000000 Dátum 2015 január 30, 16:11
Igen és terhelésre volt változás ?
Mert szinte elhanyagolható a különbség a terhelt és terheletlen motor áramfelvétele DC oldalon.
Profi 1-nél azt állítottad be, hogy az a csodás 400Hz-en azaz közel a zenei "A" hangon üvöltő PWM ne égesse szénné az aranyáron beszerzett NDK-s nyomtatómotort.
Talán még a hangoló szoftver is megvan valahol :)
De ez egy letűnt kor kezdeti időszakából való visszaemlékezések !
És mielőtt belekötne valaki a normál zenei "A" hang az pontosan 432Hz.
Cím: Re:Léptetőmotor
Írta: ra8nsmk6w Dátum 2015 január 30, 16:42
Írta: ra8nsmk6w Dátum 2015 január 30, 16:42
Egy vincseszteren megvan minden. Végül is egy része az életemnek.
Azt a hangot amit a motorok adtak ki-hát, szerintem boncolni lehet vele.
Ha irsz egy mail cimet amire képet tudok küldeni az archivumból.
Azt a hangot amit a motorok adtak ki-hát, szerintem boncolni lehet vele.
Ha irsz egy mail cimet amire képet tudok küldeni az archivumból.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 január 30, 16:57
Írta: 000000000 Dátum 2015 január 30, 16:57
Bocs, de a képét se kívánom még a hátam közepére sem, "elmúlt, szép volt, köszönöm ennyi !" ahogy a Rapülök egyik számában is elhangzott.
És ezt a hangot képzeld el mikor a Profi 1 emelt feszültségű és áramú vezérlőjével 12 Ampers fázisáramok mellet 6.4Nm-es motorokkal KB 4-5m2 rétegelt lemezzel burkolt fémvázas asztalon keresztül erősítette fel.
A szomszédból átjöttek, hogy most már fejezzük be mert nem tudnak aludni. [#hehe]
Két 40cm-es főfalon keresztül lehetett hallani.
Egy nagyobb melónál egy levél szedukszen és egy tálca sör elment mint védőital [#csodalk]
Szerinted miért utáltam meg egy életre a léptetőmotort mint szót is ?
És akkor mondják hogy elfogult vagyok.
Az ilyennek nem kívánnék mást csak egy 5-8 órás melót álljon mellet végig egy ilyen gépnél.
Cím: Re:Léptetőmotor
Írta: ra8nsmk6w Dátum 2015 január 30, 17:59
Írta: ra8nsmk6w Dátum 2015 január 30, 17:59
Átérzem! Nekem elég volt az 5.6 óra kb fél évre elosztva tesztüzemben.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2015 január 30, 19:32
Írta: Szalai György Dátum 2015 január 30, 19:32
Attól a hangtól a motort még szerethetnéd is.
Nem tehetett az róla, hogy a motorvezérlő csipogásra és fűtésre kényszerítette, forgatónyomaték termelés helyett. Akkor az volt a sokak számára elérhető meghajtó technika, (Hála érte az alkotójának.) de ma már tud csendben is működni a léptetőmotor.
Jeladós, zárt hurkú, vektorszabályozott motorkontrollerek, ráépítve a motorra egy egységben. Csökkent a léptetőmotorban a hőtermelés, nőtt a hatásfok, így kisebb is lehet a motor. A működés csendes, nincs elveszett lépés, mert a motorvezérlő minden pillanatban ismeri a forgórész pontos szöghelyzetét. A BLDC motortól is kedvezőbb a nyomaték / motorméret arány. Ahol a BLDC motorhoz áttételmű kell, ott a léptető mehet direkt hajtásként.
Nem vicc.
Nem tehetett az róla, hogy a motorvezérlő csipogásra és fűtésre kényszerítette, forgatónyomaték termelés helyett. Akkor az volt a sokak számára elérhető meghajtó technika, (Hála érte az alkotójának.) de ma már tud csendben is működni a léptetőmotor.
Jeladós, zárt hurkú, vektorszabályozott motorkontrollerek, ráépítve a motorra egy egységben. Csökkent a léptetőmotorban a hőtermelés, nőtt a hatásfok, így kisebb is lehet a motor. A működés csendes, nincs elveszett lépés, mert a motorvezérlő minden pillanatban ismeri a forgórész pontos szöghelyzetét. A BLDC motortól is kedvezőbb a nyomaték / motorméret arány. Ahol a BLDC motorhoz áttételmű kell, ott a léptető mehet direkt hajtásként.
Nem vicc.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 február 04, 22:14
Írta: 000000000 Dátum 2015 február 04, 22:14
Áthoztam a lézer topikból.
© Fishi ma 20:48 | Válasz | #5700
Szia!
A szóban forgó léptecs: Japan Servo, Type KH42HM2-052, 1,8 DEG/STEP, NO.5927.
A vezérlő: V-Type TB6560.
Leírás szerint: "A vezérlő pillanatnyi- azaz csúcsárama 3.5A. A tartó árama 2.5A.
A beállított mód százalék értéke mind a két értéket arányosan változtatja!
Tehát nem csak a tartóáramot módosítja.
Ha 15-30 perces működés után a motor hőmérséklete túl magas lenne, akkor csökkentsük a beállított áramot!"
Ez van a legkisebb, azaz 25%-ra állítva és nagyon forró volt anno a motor. Kapott egy nagy hűtőbordát ventivel, még csak nem is langyos. De ez nem változtat a cakkosságon...
Vélemény?
Válasz 'Pál' üzenetére (#5693)
© Fishi ma 20:48 | Válasz | #5700
Szia!
A szóban forgó léptecs: Japan Servo, Type KH42HM2-052, 1,8 DEG/STEP, NO.5927.
A vezérlő: V-Type TB6560.
Leírás szerint: "A vezérlő pillanatnyi- azaz csúcsárama 3.5A. A tartó árama 2.5A.
A beállított mód százalék értéke mind a két értéket arányosan változtatja!
Tehát nem csak a tartóáramot módosítja.
Ha 15-30 perces működés után a motor hőmérséklete túl magas lenne, akkor csökkentsük a beállított áramot!"
Ez van a legkisebb, azaz 25%-ra állítva és nagyon forró volt anno a motor. Kapott egy nagy hűtőbordát ventivel, még csak nem is langyos. De ez nem változtat a cakkosságon...
Vélemény?
Válasz 'Pál' üzenetére (#5693)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 február 04, 22:17
Írta: 000000000 Dátum 2015 február 04, 22:17
Kicsit több infó kell például a mechanikáról az 1 lépésre megtett útról, mert így csak találgatni lehet.
Cím: Re:Léptetőmotor
Írta: 90p3mhzrp Dátum 2015 február 07, 18:48
Írta: 90p3mhzrp Dátum 2015 február 07, 18:48
Szép estét!!!
Segíséget szeretnék kérni a képeken látható motorokról.
Hogyan tudom meg hány amperesek a motorok?
Előre is köszönöm.

Segíséget szeretnék kérni a képeken látható motorokról.
Hogyan tudom meg hány amperesek a motorok?
Előre is köszönöm.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 február 07, 18:59
Írta: 000000000 Dátum 2015 február 07, 18:59
Van hozzá unipoláris vezérlőd is ?
Sajnos bipolárisan ezen csak sorosan lehet kötni a tekercseket így a feszültsége magasabb lesz az elérhető nyomaték / fordulatszám görbe pedig laposabb.
Amúgy Google a barátod !
Cikkszám alapján van némi esély megtalálni az adatlapot.
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2015 február 07, 21:48
Írta: KBalázs Dátum 2015 február 07, 21:48
Ha az egyik szélsô és a mellette lévô kivezetés között ellenállást mérsz, és az 6.8 Ohm, akkor 1A unipolárisban ezeknek a motoroknak az ajánlott max áramfelvételük. Ekkor 0.8 Nm a tartó nyomatékuk.
Ha ügyes vagy, akkor átkötheted párhuzamosra, belül (de a rotort ki ne vedd!), volt itt akinek ez sikerült, úgy jobban gyorsulnak majd. Ekkor max 1.4A folyhat át rajtuk, de nem lesznek sokkal erősebbek.
Mérd meg hogy tényleg ennyi-e az ellenállása, és írd meg ide.
Ha ügyes vagy, akkor átkötheted párhuzamosra, belül (de a rotort ki ne vedd!), volt itt akinek ez sikerült, úgy jobban gyorsulnak majd. Ekkor max 1.4A folyhat át rajtuk, de nem lesznek sokkal erősebbek.
Mérd meg hogy tényleg ennyi-e az ellenállása, és írd meg ide.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 február 07, 23:20
Írta: 000000000 Dátum 2015 február 07, 23:20
Általában az unipoláris és bipoláris hajtás között ugyanannál a motornál kb 30-40% nyomaték növekedés érhető el.
Pontosabban bipoláris hajtásnál 100% a nyomaték unipolárisban ennek a 60-70%.
De attól függetlenül ezek a motorok a bútorlapos gépek színvonalához valók.
Ettől nagyobb motorokat is ajándékoztam el mert nálam ez játék vagy beugró szint, más meg őrül neki.
Ilyenért nincs pofám pénzt kérni !
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2015 február 07, 23:54
Írta: KBalázs Dátum 2015 február 07, 23:54
Ezt írtam én is, már ami a technikai részét illeti.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 február 08, 00:39
Írta: 000000000 Dátum 2015 február 08, 00:39
Száz szónak is egy a vége, akármilyen kombinációban is kerestem ezeket a motorokat sajnos a Google nem akart segíteni.
Találtam egy hasonló motor ugyanettől a gyártótól amiből kiderült pár dolog.
KH56 a típus jelölésben a pajzs méretet takarja milliméterben
L erre nem igazán derült fény talán a két tengely kivezetés.
M2 hogy 2 fázisú
04 a nyomatékot adva meg x10 azaz 40 gf*cm
9 padig a feszültségre utalhat.
Sajnos többet nem tudtam kibányászni Google barátunktól
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 február 08, 00:46
Írta: 000000000 Dátum 2015 február 08, 00:46
A nyomaték nem 100% csak következtetés.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 február 08, 01:08
Írta: 000000000 Dátum 2015 február 08, 01:08
Megvan a tuti !
HK = 2 fázisú
54 = pajzs méret mm-ben
L = motor hosszának a mérete E=20.8mm F=27mm G=31mm H=34mm J=40-42mm K=50-54mm Q=76 de sajnos L nincs.
M = HB motor azaz hybrid
2 = lépés szög 06=0.6fok 1=1.2fok 2=1.8fok 4=3.75fok/lépés
049-re nincs magyarázat de ez adná meg a tekercs elrendezést és a feszültséget, áramot.
Ez valami egyedi széria esélytelen adatlapot vadászni hozzá !
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2015 február 08, 01:08
Írta: s7manbs8 Dátum 2015 február 08, 01:08
A méret aránylag mutat valami irányadó képességet.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 február 08, 01:18
Írta: 000000000 Dátum 2015 február 08, 01:18
Ha legalább a tartó nyomatékot lehetne tudni 100%-ra akkor egy labortáppal és egy tárcsával némi madzaggal és megfelelő mennyiségű például vízzel meg lehetne állapítani a feszt és áramot.
Lehet agyalni mégis ezekkel hogyan :D
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2015 február 08, 01:31
Írta: s7manbs8 Dátum 2015 február 08, 01:31
Ha a hófokot megnézi mennyire melegszik mennyi áramnál, kb be lehetne lőni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 február 08, 01:55
Írta: 000000000 Dátum 2015 február 08, 01:55
Ha tudná az ember a nyomatékot akkor tesz rá egy tárcsát teker rá némi madzagok pet palackba megfelelő mennyiségű víz hogy meglegyen az adott sugáron a tartónyomaték és labortápon adni naki a feszt.
Mikor már pont megtartja akkor leolvasni a áramot és feszültséget.
Csak sajna ennél a motornál ez egy nagyon sok ismeretlenes valamiről beszélünk.
Ez a hőfokos megoldás is csak ilyen saccográfos valaminek jó.
Volt egy frankó Napirajzos karikatúra erre, de sajnos nem találom.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2015 február 08, 02:18
Írta: s7manbs8 Dátum 2015 február 08, 02:18
No, persze, legalább arra elég, hogy ne tévedjen el egy másik Galaxisba a Naprendszerbűűűl.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 február 08, 03:05
Írta: 000000000 Dátum 2015 február 08, 03:05
Most már csak azért is megkerestem a poént :)
Ez a hőmérséklet méréses dolog pont ennyire lenne pontos :D LINK
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2015 február 08, 05:19
Írta: KBalázs Dátum 2015 február 08, 05:19
Én pont egy éve ennek a motornak az egytengelyes változatával kísérleteztem, meg labortáppal, meg pár fellelt adatlappal (amiben ilyen hossz, ilyen ellenállású, induktivitású unipol motorok voltak) és a tartónyomatékot mértem meg. Itt ki is veséztük
Ugye kerestem viszonyítási alapot, mihez hasonlít a meglévô adatlapú motorok közül. Kb mint most © Kőhegyi Gábor. Meg is lettem miatta kövezve, hogy biztosan nem hajtani akarok a motorral, hanem tartani, ami egy abszurd kötözködés, dehát ilyen errefelé a hangulat már egy ideje.
Ugye kerestem viszonyítási alapot, mihez hasonlít a meglévô adatlapú motorok közül. Kb mint most © Kőhegyi Gábor. Meg is lettem miatta kövezve, hogy biztosan nem hajtani akarok a motorral, hanem tartani, ami egy abszurd kötözködés, dehát ilyen errefelé a hangulat már egy ideje.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 február 08, 09:58
Írta: 000000000 Dátum 2015 február 08, 09:58
Általában az ilyen motorok egy cégnek készülnek valami gyártmányba speciális vagy egyedi paraméterekkel PL nyomtató,ATM pénzadagoló, stb stb.
Leleményes hobbys kibontja és akkor keresek meg még is mit tud, de sajnos ezeket a egyedi dolgokat nem teszik közzé.
Van egy régi haverom Ő kimondottan csak ipari elektronikával foglalkozik profi szinten (PLC AC szervó...)
Sok éve beleszaladtunk egy DR2-es AC hajtás szériában amiinek az egyik csatlakozója eltért a publikus adatlapon közzétettől.
Haver perfekt angol tudásával írt is a Yaskawának hogy tudnának küldeni valami mankót ehhez a szériához ?
Finom szólva elhajtottak mint a magzatvizet mivel ezt csak egy cégnek gyártották és övék az egyedüli jog a dokumentációra.
Pedig a japcsik nem csinálnak ilyet, minden doksit megosztanak.
Visszatérve a léptetőmotorra, mindegyik adatlapon a csak Holding Torque van feltüntetve, ezért se értem mi a francot is gondoltak.
A kötözködésre visszatérve mindig is voltak viták, de ez egy szakmai fórumon szinte elkerülhetetlen, de ez amit tibor csinál a személyem ellen irányuló lejáratással kapcsolatban ez már tűrhetetlen !
Ajnározza a dos-os hajtásvezérlőjét ami megvásárolva kap az embert egy korlátozott valami.
Tételezzük fel kell egy plusz tengely mivel bejött egy olyan meló amit forgatni is kell és csak X Y Z-re vásároltam meg a jogot.
De sajnálatos módon a delikvens elhunyt, ilyenkor mégis mit tudok csinálni, van tovább aki folytassa ?
Ezt megkérdeztem tőle erre a igen csak beszűkült tudata elborult és habzó szájjal mindenféle a valóságot köszönő viszonyba se állító alaptalanságokkal dobálózott sértegetett.
Mikor mondtam neki hogy bocsánatot kéne kéri még ő gúnyoskodott.
Ezt személyesen csinálja meg az a minimum bárkitől, hogy felpofozza!
Cím: Re:Léptetőmotor
Írta: 90p3mhzrp Dátum 2015 február 08, 18:46
Írta: 90p3mhzrp Dátum 2015 február 08, 18:46
Hát először is köszönöm a sok segítséget, és a gyors választ. Megmértem a motor ellenállását és 6,8 Ohm. Vásároltam ebay ról egy arduino vezérlőt.
http://www.ebay.com/itm/Mini-Kossel-Delta-Reprap-3D-Printer-Arduino-Mega-2560-Ramps-1-4-A4988-LCD-/311055858797?pt=LH_DefaultDomain_0&var=&hash=item486c5fbc6d
viszont fogalmam sincs, hogy meghajthatom e vele a motort. A motorok egy 3d nyomtatóhoz kellenének. Ha a nyomatékot és a fordulatot is szeretném megtartani akkor milyen motorokat lenne érdemes vásárolni? Egy forumos kolega azt javasolta 2A alattit ne vegyek.
http://www.ebay.com/itm/Mini-Kossel-Delta-Reprap-3D-Printer-Arduino-Mega-2560-Ramps-1-4-A4988-LCD-/311055858797?pt=LH_DefaultDomain_0&var=&hash=item486c5fbc6d
viszont fogalmam sincs, hogy meghajthatom e vele a motort. A motorok egy 3d nyomtatóhoz kellenének. Ha a nyomatékot és a fordulatot is szeretném megtartani akkor milyen motorokat lenne érdemes vásárolni? Egy forumos kolega azt javasolta 2A alattit ne vegyek.
Cím: Re:Léptetőmotor
Írta: 0bn8uxmw Dátum 2015 február 08, 19:43
Írta: 0bn8uxmw Dátum 2015 február 08, 19:43
Ezek teljesen jók lesznek neked:
Vatera - NEMA17 lépetőmotor-42BYGHW811
Adatlap:
Adatlap - 42BYGHW811
A lényeg, hogy alacsony legyen a tekercsellenállása: dinamikusabb és nem melegszik.
Vatera - NEMA17 lépetőmotor-42BYGHW811
Adatlap:
Adatlap - 42BYGHW811
A lényeg, hogy alacsony legyen a tekercsellenállása: dinamikusabb és nem melegszik.
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2015 február 08, 19:47
Írta: KBalázs Dátum 2015 február 08, 19:47
Ezeknél egy számmal kisebbet kéne beszerezned motorokból. Tehát a most asztalodon lévô NEMA23 méretûek helyett NEMA17 motorok a nyerôk, fôképp ha egy kész terv (mármint nem saját) alapján készítenéd el. Amikre figyelj, hogy amit vettél vezérlô, a bipoláris motorokat kedveli (tehát 4 kivezetéseseket, de ha 8 kivezetésest kapsz, az is jó, ekkor ismét kérdezz itt), azokból is a nagyobb áramúakat.
Amikor fényképen nézed ezeket a NEMA17 motorokat (hirdetve), akkor azok a jók, amiknek jellemzôen a hosszuk közel akkora, vagy nagyobb mint a szélességük (L=45mm vagy több), ha rövidebb (ez arányos a nyomatékkal), akkor a nyomatékuk lehet nem lesz elegendô a mechanika mozgatásához.
A mostani motorjaid pedig egy késôbbi kisérleti projektedhez lesznek kiváló alapok.
Amikor fényképen nézed ezeket a NEMA17 motorokat (hirdetve), akkor azok a jók, amiknek jellemzôen a hosszuk közel akkora, vagy nagyobb mint a szélességük (L=45mm vagy több), ha rövidebb (ez arányos a nyomatékkal), akkor a nyomatékuk lehet nem lesz elegendô a mechanika mozgatásához.
A mostani motorjaid pedig egy késôbbi kisérleti projektedhez lesznek kiváló alapok.
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2015 február 08, 19:48
Írta: KBalázs Dátum 2015 február 08, 19:48
Ja, pl. ezek tökéletesek.[#eljen]
Cím: Re:Léptetőmotor
Írta: 90p3mhzrp Dátum 2015 február 10, 13:56
Írta: 90p3mhzrp Dátum 2015 február 10, 13:56
Köszönöm a válaszokat.
Számomra ez rengeteg segítség volt. Akkor beszerzek 4 nema 17 es motort. Valakinek van eladó közületek?
Még egyszer köszi mindenkinek.
Számomra ez rengeteg segítség volt. Akkor beszerzek 4 nema 17 es motort. Valakinek van eladó közületek?
Még egyszer köszi mindenkinek.
Cím: Re:Léptetőmotor
Írta: iv43r83d Dátum 2015 február 10, 23:07
Írta: iv43r83d Dátum 2015 február 10, 23:07
Szép estét!Kérdésem léptetőmotorral kapcsolatban állóhelyzeti áramnál picit tudom mozgatni a motor tengelyét. Ez hiba? Ha igen akkor mi az oka? Előre is köszönöm a segítséget!
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2015 február 10, 23:38
Írta: PSoft Dátum 2015 február 10, 23:38
Kevés a motorod tartóárama.
Ez még önmagában,nem biztos hogy hiba.
Alkalmazásfüggő is lehet.
Cím: Re:Léptetőmotor
Írta: Sz.József Dátum 2015 február 11, 06:56
Írta: Sz.József Dátum 2015 február 11, 06:56
Nem tudom mennyi az a "pici"...(?)
De nekem egyszer megfordult a kezemben egy olyan léptető, aminek a tengelye el vált (?) az állórésztől
és egy "picit" kottyant a tengely az állórészben, tartó áram nagyságától függetlenül...
Azt hittem a forgórészt tudom mozgatni és kiderült, csak a tengely kotyog...
De nekem egyszer megfordult a kezemben egy olyan léptető, aminek a tengelye el vált (?) az állórésztől
és egy "picit" kottyant a tengely az állórészben, tartó áram nagyságától függetlenül...
Azt hittem a forgórészt tudom mozgatni és kiderült, csak a tengely kotyog...
Cím: Re:Léptetőmotor
Írta: iv43r83d Dátum 2015 február 11, 07:13
Írta: iv43r83d Dátum 2015 február 11, 07:13
Szép napot! Ha a tartóáram a dinamikus árammal megegyezik akkor is ez a hiba.
Cím: Re:Léptetőmotor
Írta: iv43r83d Dátum 2015 február 11, 07:39
Írta: iv43r83d Dátum 2015 február 11, 07:39
Szép napot! Alu marásnál jött a hiba mert tizedeket csal kb 50-70 órát működött hibátlanul.A motorokat lehet javítani vagy a kukába kell dobni 100000-et? A kottyanás lehet vezérlő hiba is?Vagy egyértelmű motor hiba.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 február 11, 07:44
Írta: 000000000 Dátum 2015 február 11, 07:44
Nem egyedi probléma ez a tengely leválás !
Cím: Re:Léptetőmotor
Írta: Sz.József Dátum 2015 február 11, 07:49
Írta: Sz.József Dátum 2015 február 11, 07:49
Nálad mi lehet a bibi nem tudom.
Csak leírtam, hogy én hogyan jártam.
Nálam egyértelműen a motor mechanikus hibája lett kiderítve...
Csak leírtam, hogy én hogyan jártam.
Nálam egyértelműen a motor mechanikus hibája lett kiderítve...
Cím: Re:Léptetőmotor
Írta: Sz.József Dátum 2015 február 11, 07:50
Írta: Sz.József Dátum 2015 február 11, 07:50
Szerencsére még csak egy ilyen akadt a kezembe...
Cím: Re:Léptetőmotor
Írta: iv43r83d Dátum 2015 február 11, 11:02
Írta: iv43r83d Dátum 2015 február 11, 11:02
A tengelyleválást lehet javítani?
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2015 február 11, 11:29
Írta: KBalázs Dátum 2015 február 11, 11:29
Óvatosan fedlapot szétszedve, és a rotort kiékelve /nem kihúzni!/ a tengelyt egy olyan pozícióba forgatni izomból a rotorhoz képest, ahol totálisan megszorul? Ez csak egy tipp, de bejöhet. Ragasztás a hôtermelôdés és a tengely köszörültsége végett lehetetlen vállalkozásnak tûnik.
Cím: Re:Léptetőmotor
Írta: iv43r83d Dátum 2015 február 11, 16:52
Írta: iv43r83d Dátum 2015 február 11, 16:52
Miért nem szabad kihúzni a forgórészt a helyéről?
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2015 február 11, 17:11
Írta: KBalázs Dátum 2015 február 11, 17:11
Ki szabad, ha utána már csak levélnehezéknek használnád a motort. Tönkremegy, lemágnesezôdik a rotor. Azonnal.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 február 11, 17:54
Írta: istvan58 Dátum 2015 február 11, 17:54
Na ez már nem érvényes teljes egészében.
Az új neodinium mágnesel készült motoroknál ez a veszély már nem al fent. Csak az alnico magnesekel készültek-re érvényes.
Az új neodinium mágnesel készült motoroknál ez a veszély már nem al fent. Csak az alnico magnesekel készültek-re érvényes.
Cím: Re:Léptetőmotor
Írta: iv43r83d Dátum 2015 február 11, 20:28
Írta: iv43r83d Dátum 2015 február 11, 20:28
Köszönöm szépen a válaszokat de azt hogy lehet megállapítani hogy milyen mágnessel szerelték?
Cím: Re:Léptetőmotor
Írta: zoli0302 Dátum 2015 február 11, 20:40
Írta: zoli0302 Dátum 2015 február 11, 20:40
Kiszeded és ha visszaszerelés után is jó akkor neodinium :) Hagyd a forgórészt a helyén, szedd le az egyik pajzsot a csapággyal együtt, hőlégfúvóval melegítsd fel úgy 100 fokra, aztán csepegtess csapágyrögzítőt a tengely és forgórész találkozására valamennyi be fog kúszni a felületek közé. Melegítsd fel 200C ra. Szereld össze, várj egy fél órát és próbáld meg.
Cím: Re:Léptetőmotor
Írta: mex Dátum 2015 február 11, 20:45
Írta: mex Dátum 2015 február 11, 20:45
"Melegítsd fel 200C ra."
Ha esetleg mégiscsak neodímium mágnes volt a forgórészben,akkor sikerrel gyengíted el azt a típust is.
Ha esetleg mégiscsak neodímium mágnes volt a forgórészben,akkor sikerrel gyengíted el azt a típust is.
Cím: Re:Léptetőmotor
Írta: zoli0302 Dátum 2015 február 11, 20:50
Írta: zoli0302 Dátum 2015 február 11, 20:50
Lehet, de az csodaszámba megy ha 200 fok árt neki.
De elhagyható a lépés, csak akkor várni kell a kipróbálással úgy 12 órát
De elhagyható a lépés, csak akkor várni kell a kipróbálással úgy 12 órát
Cím: Re:Léptetőmotor
Írta: Dakota25 Dátum 2015 február 11, 20:52
Írta: Dakota25 Dátum 2015 február 11, 20:52
...ha ezután nem működik, beazonosítottad a neodímium mágnest :)
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 február 11, 21:02
Írta: istvan58 Dátum 2015 február 11, 21:02
Most olvastam a neodinyum magnesröl es azt irja hogy maradandó lemagnesezést csak a curie pont elérésekor szenved. Ez 310...400 celsius fok.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2015 február 11, 21:11
Írta: svejk Dátum 2015 február 11, 21:11
Melyik csapágyrögzítő ragasztó az, minek a kötése 200 C fokon gyorsítható?
Java részük már 180 fok fölött eldobja magát, így lehet oldani őket.
Java részük már 180 fok fölött eldobja magát, így lehet oldani őket.
Cím: Re:Léptetőmotor
Írta: mex Dátum 2015 február 11, 21:16
Írta: mex Dátum 2015 február 11, 21:16
Cím: Re:Léptetőmotor
Írta: iv43r83d Dátum 2015 február 11, 22:41
Írta: iv43r83d Dátum 2015 február 11, 22:41
Köszönök szépen minden infót az uraknak!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 február 12, 09:58
Írta: 000000000 Dátum 2015 február 12, 09:58
Tegnap került hozzám egy zsír új HY-DIV268B-5A típusú vezérlő.
Mindenek előtt szétszedtem és megnéztem mennyi paszta van alatta. (mutatóba volt alatta valami olajos akármi)
Csodálatos belvilágról néhány kép
Miután tettem alá normális pasztát, próbálgattam egy USB-s mozgásvezérlővel, és egy Kenwood Labortápról hajtva.
Körülbelül 15-20 percet működött is aztán a labortáp leült mivel az áramkorlát meghaladta a maximálist. (ergo zárlat)
Ez is elfingotta magát semmi előzetes jelenség nélkül, még langyosnak se volt mondható.
Erre mondjatok valamit ?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 február 12, 10:01
Írta: 000000000 Dátum 2015 február 12, 10:01
Még annyit az előzőhöz, stabil 36 Voltról lett tesztelve egy 2.5 Amperes fázisáramú motorral.
Tehát még az se mondhatnám hogy határértéken lett járatva.
Cím: Re:Léptetőmotor
Írta: zoli0302 Dátum 2015 február 12, 20:13
Írta: zoli0302 Dátum 2015 február 12, 20:13
Bármelyik.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2015 február 12, 22:32
Írta: PSoft Dátum 2015 február 12, 22:32
"Erre mondjatok valamit?"
Hát...
Így jártál!
Hiba volt szétszedni/összekenni.:(
Nincsenek ezek a "normális pasztához" szokva!!!
Nekem,a H2-esem évek óta szárazon,paszta nélkül megy.
A "gyártó" nem tartotta fontosnak,hát én se tettem.
[#nevetes1]
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2015 február 13, 09:13
Írta: svejk Dátum 2015 február 13, 09:13
Ahol már a pasztán, múlik ott már el van b@szva az egész tervezés és határértéken jár a cucc
Ettől függetlenül én is rakok ilyen helyekre ha kell ha nem, bár utálom, mert szervizeléskor úgy néz ki az ember tőle mint a disznó.
Ettől függetlenül én is rakok ilyen helyekre ha kell ha nem, bár utálom, mert szervizeléskor úgy néz ki az ember tőle mint a disznó.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2015 február 13, 09:15
Írta: svejk Dátum 2015 február 13, 09:15
Én a LOCTITE 270 és 638-at használgatom de mindkettő 200 fok környékén elhagyja magát, kifehéredik, elporlad és könnyen oldható.
Bár ezt hőfokot sosem mértem meg pontosan, de a szakirodalom is ezt írja a szétszereléshez.
Bár ezt hőfokot sosem mértem meg pontosan, de a szakirodalom is ezt írja a szétszereléshez.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 február 13, 09:30
Írta: 000000000 Dátum 2015 február 13, 09:30
A H2-ben nem is ilyen IC van (TB6560)
Ebben a fostalicskában meg TB6600. 48 volt 5 ampert tudna.
Ahhoz képest 36 voltnál és 2.5 Ampernél elment az örök vadászmezőkre kapálni.
És nem az első ilyen eset !
A hővezető pasztával meg biztos nincs gond mert ettől sokkal jobban disszipáló alkatrésznél is megfelelt.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2015 február 17, 20:56
Írta: svejk Dátum 2015 február 17, 20:56
Az utóbbi napokban elég viharos volt Tibor45 topicja.
Ha jól vettem ki az írásaiból akkor Tibor45
kifejlesztett a vezérlőjéhez egy olyan algoritmust, amelyik széles körűen kihasználja a léptetőmotorok un. start-stop frekvenciáját.
Ezt aztán szerintem sokan félreértették.
Magát az elvet ismerjük régóta, nekem anno 6-7 éve Varsányi mutatta be itt a fórumon a WINPC-NC programja kapcsán.
De mivel a MACH3 sajnos nem ismeri ezt a funkciót, ezért valószínű gyorsan feledésbe merült.
Én nem nagyon foglalkozom léptetőmotorokkal,
akkor is inkább mint segítő, így kértem egyet kölcsön.
A motor adatai:
bipoláris
1,8 fok
ellenállás: 0,43 Ohm
induktivitás: 1,7 mH
áram: 8,4 A
nyomaték: 5,4 Nm
inercia: 1,95 kgcm4
Sajnos a vezérlőm kisebb, így nem tudom rendesen kihajtani a motort, de minden teszt alatt ez lesz a konfiguráció.
tápfesz: 36 V
áram: 5,4 A
féllépés, azaz 400 step/fordulat.
A motor nyomaték diagramja:
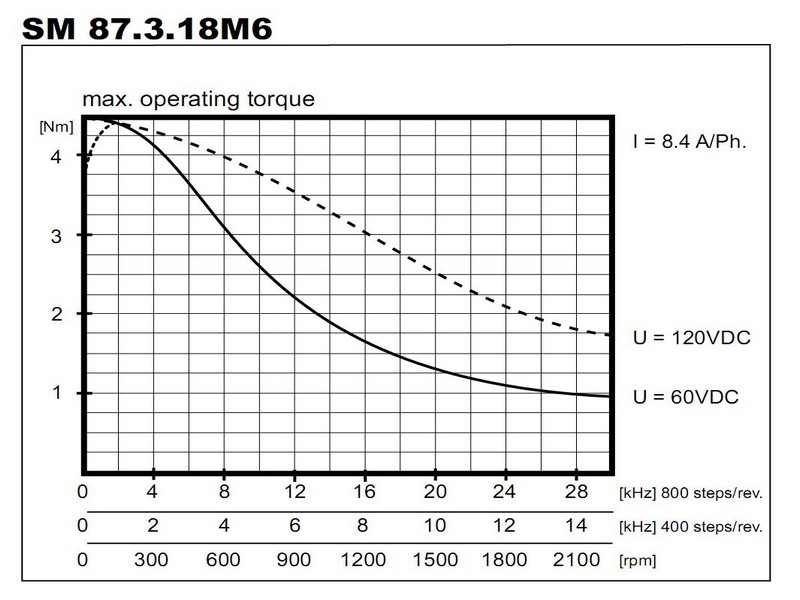
A program egyelőre MACH3, de szándékomban áll
az UCCNC-vel és a TurboCNC-vel is kipróbálni.
A motor jelentős tehetetlenségi nyomatékkal
rendelkezik, így mechanika nélkül is jól kiértékelhető a kísérlet.
A MACH3 beállításai:
400 step/mm,
A gyorsulást felvettem 1000000 mm/s2-re, ez bizonyára nem valós, de régebbi szkópos méréseim alapján ez gyakorlatilag egységurgásnak fele meg.
Az első tesztnél úgy kerestem meg az a maximális léptetési frekvenciát amelyiknél még nincs lépésvesztés, hogy 1-fordulatot forgattam a motort jobbra majd balra, közte 1 másodperces szünetek vannak az álló helyzet biztos felvételére, azaz 0-ról gyorsítunk és 0-ra lassítunk.
A G kód az alábbi, fokozatosan emeltem az F előtolás értékét, és kimondható, hogy 330 mm/perc, azaz visszaszámolva 2,2 kHz step frekvenciáig lépésvesztés nélkül végrehajtotta a kódot.
Tehát álló helyzetből ekkora a terheletlen motor start-stop frekvenciája, ezt rámpa NÉLKÜL tudja.
G90G61
M98 P1234 L500
M30
O1234
G4 P1
G1 X1 F330
G4 P1
G1 X0
M99
A következő teszt az volt, hogy nem tartottam szünetet, azaz megállás nélkül irányt váltottam a lentebbi G-kóddal.
Ekkor a motor tehetetlensége már jelentősebb szerepet játszik és ez meg is mutatkozott abban hogy ebben az üzemmódban 170 mm/perc azaz 1,13 kHz volt az a frekvencia amit lépésvesztés nélkül le tudott követni a terheletlen motor.
G90G61
M98 P1234 L500
M30
O1234
G1 X1 F170
G1 X0
M99
Mára ennyi, ha lesz időm-kedvem folytatom.
Kíváncsi vagyok, hogy ezekre a frekvenciákra milyen hatással lesznek a nagyobb microstep beállítások.
Illetve természetesen megmérem majd azt is, hogy egy adott sebességre mekkora gyorsulással(rámpával) lehet lépésvesztés nélkül eljutni, ez ugye a MACH3 által használt mindenkori üzemmód.
Tervbe lenne még sok egyéb mérés is de azok kissé bonyolultabbak és be kellene üzemelni hozzá még pár műszert. ( jeladó a tengelyre, tárolós szkóp, stb)
A tengelyre is szerelhetnék lendkereket ami egy adott mechanikát szimulálna, de majd meglátom mi lesz belőle.
Ha jól vettem ki az írásaiból akkor Tibor45
kifejlesztett a vezérlőjéhez egy olyan algoritmust, amelyik széles körűen kihasználja a léptetőmotorok un. start-stop frekvenciáját.
Ezt aztán szerintem sokan félreértették.
Magát az elvet ismerjük régóta, nekem anno 6-7 éve Varsányi mutatta be itt a fórumon a WINPC-NC programja kapcsán.
De mivel a MACH3 sajnos nem ismeri ezt a funkciót, ezért valószínű gyorsan feledésbe merült.
Én nem nagyon foglalkozom léptetőmotorokkal,
akkor is inkább mint segítő, így kértem egyet kölcsön.
A motor adatai:
bipoláris
1,8 fok
ellenállás: 0,43 Ohm
induktivitás: 1,7 mH
áram: 8,4 A
nyomaték: 5,4 Nm
inercia: 1,95 kgcm4
Sajnos a vezérlőm kisebb, így nem tudom rendesen kihajtani a motort, de minden teszt alatt ez lesz a konfiguráció.
tápfesz: 36 V
áram: 5,4 A
féllépés, azaz 400 step/fordulat.
A motor nyomaték diagramja:
A program egyelőre MACH3, de szándékomban áll
az UCCNC-vel és a TurboCNC-vel is kipróbálni.
A motor jelentős tehetetlenségi nyomatékkal
rendelkezik, így mechanika nélkül is jól kiértékelhető a kísérlet.
A MACH3 beállításai:
400 step/mm,
A gyorsulást felvettem 1000000 mm/s2-re, ez bizonyára nem valós, de régebbi szkópos méréseim alapján ez gyakorlatilag egységurgásnak fele meg.
Az első tesztnél úgy kerestem meg az a maximális léptetési frekvenciát amelyiknél még nincs lépésvesztés, hogy 1-fordulatot forgattam a motort jobbra majd balra, közte 1 másodperces szünetek vannak az álló helyzet biztos felvételére, azaz 0-ról gyorsítunk és 0-ra lassítunk.
A G kód az alábbi, fokozatosan emeltem az F előtolás értékét, és kimondható, hogy 330 mm/perc, azaz visszaszámolva 2,2 kHz step frekvenciáig lépésvesztés nélkül végrehajtotta a kódot.
Tehát álló helyzetből ekkora a terheletlen motor start-stop frekvenciája, ezt rámpa NÉLKÜL tudja.
G90G61
M98 P1234 L500
M30
O1234
G4 P1
G1 X1 F330
G4 P1
G1 X0
M99
A következő teszt az volt, hogy nem tartottam szünetet, azaz megállás nélkül irányt váltottam a lentebbi G-kóddal.
Ekkor a motor tehetetlensége már jelentősebb szerepet játszik és ez meg is mutatkozott abban hogy ebben az üzemmódban 170 mm/perc azaz 1,13 kHz volt az a frekvencia amit lépésvesztés nélkül le tudott követni a terheletlen motor.
G90G61
M98 P1234 L500
M30
O1234
G1 X1 F170
G1 X0
M99
Mára ennyi, ha lesz időm-kedvem folytatom.
Kíváncsi vagyok, hogy ezekre a frekvenciákra milyen hatással lesznek a nagyobb microstep beállítások.
Illetve természetesen megmérem majd azt is, hogy egy adott sebességre mekkora gyorsulással(rámpával) lehet lépésvesztés nélkül eljutni, ez ugye a MACH3 által használt mindenkori üzemmód.
Tervbe lenne még sok egyéb mérés is de azok kissé bonyolultabbak és be kellene üzemelni hozzá még pár műszert. ( jeladó a tengelyre, tárolós szkóp, stb)
A tengelyre is szerelhetnék lendkereket ami egy adott mechanikát szimulálna, de majd meglátom mi lesz belőle.
Cím: Re:Léptetőmotor
Írta: s2k5ycubj Dátum 2015 február 17, 22:10
Írta: s2k5ycubj Dátum 2015 február 17, 22:10
Ma én is így jártam egy ugyan ilyennel,ugyan így. Azután bánatosan elővettem a másikat is és az működik rendesen. Érdekes,hogy a motornak más hangja volt a két vezérlővel. Lesz egy ic cserém...De ahogy elnézem,ezeket még véletlenül sem fogom az esztergára tenni. Valószínűleg valamilyen típushiba van az ic-ben. Lehet rendelek két eredetit bele.
Cím: Re:Léptetőmotor
Írta: KoLa Dátum 2015 február 17, 22:32
Írta: KoLa Dátum 2015 február 17, 22:32
Akkor értem!ez az, amit fülre szoktunk beállítani!
Régebben azt mondta Tibor45 hogy, ezt kell visszaveni 60%-ra és akkor jó lesz a gép!
Nem igazán fogadtam meg ezt!de visszább vettem, és jól működik!
Az viszont jobban érdekelne hogy a léptetési frekvencia hogyan befolyásolja az elérhető sebességet!?[#eljen]
Régebben azt mondta Tibor45 hogy, ezt kell visszaveni 60%-ra és akkor jó lesz a gép!
Nem igazán fogadtam meg ezt!de visszább vettem, és jól működik!
Az viszont jobban érdekelne hogy a léptetési frekvencia hogyan befolyásolja az elérhető sebességet!?[#eljen]
Cím: Re:Léptetőmotor
Írta: xit3medzv Dátum 2015 február 17, 22:39
Írta: xit3medzv Dátum 2015 február 17, 22:39
Jól hangzik.
A gépet be kell venni a pakliba, a mechanikai rendszer válasza a kérdés.
A lendkerék túl ideális.
A gépet be kell venni a pakliba, a mechanikai rendszer válasza a kérdés.
A lendkerék túl ideális.
Cím: Re:Léptetőmotor
Írta: KoLa Dátum 2015 február 17, 22:44
Írta: KoLa Dátum 2015 február 17, 22:44
MSD vagy MSDD kell Neked!akkor, minimum!Az esztergára!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 február 17, 22:45
Írta: 000000000 Dátum 2015 február 17, 22:45
Legutóbb ezt a típust teszteltem: Leadshine-AM882.
Az összes előző léptető vezérlők elbujdoshat szégyenében ez mellet.
Még a hangja is más a motoroknak tőle.
Ahogy Svejk mondaná, Tisztább szárazabb érzés !
Meg is kell fizetni az árát mert 25,000 körül ér ide, de az érzés megfizethetetlen ! [#nevetes1]
A TB6600-es IC meg saját magát fingatja ki a nem megfelelő impulzus szélességgel való meghajtás miatt.
Más magyarázat nincs erre.
Cím: Re:Léptetőmotor
Írta: xit3medzv Dátum 2015 február 17, 22:48
Írta: xit3medzv Dátum 2015 február 17, 22:48
Esetleg tudok adni neked kölcsön a teszthez egy komplett Z egységet.
Cím: Re:Léptetőmotor
Írta: s2k5ycubj Dátum 2015 február 18, 01:13
Írta: s2k5ycubj Dátum 2015 február 18, 01:13
Szerintem hamisítják toshiba ic-ket és csak a hiba marad,a tosh lemaradt...[#nevetes1][#nevetes1][#nevetes1]
Szerintem építeni fogok magamnak,valószínűleg így járok a legjobban. Ma már ismeretlen fogalom a túlméretezés. Nálam úgy néz ki a rövidzárvédelem,hogy összetekerem a kimenet drótjait és elmegyek kényelmesen kávézni. Ha túlélte akkor jó.
Szerintem építeni fogok magamnak,valószínűleg így járok a legjobban. Ma már ismeretlen fogalom a túlméretezés. Nálam úgy néz ki a rövidzárvédelem,hogy összetekerem a kimenet drótjait és elmegyek kényelmesen kávézni. Ha túlélte akkor jó.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2015 február 18, 06:33
Írta: svejk Dátum 2015 február 18, 06:33
Az eddigi tapasztalataim szerint elég jól lehet vele modellezni a mechanikát. Esetleg még a kerékhez szorított "fékkel" a lineáris mozgó elemek súrlódását is lehetne modellezni, mely a lengést csökkenti.
Ha nagyon akarnám össze tudnék az itthoni anyagokból dobni egy szánrendszert, de úgy gondolom az elv gyakorlati bemuatása így is sikerült.
Ha nagyon akarnám össze tudnék az itthoni anyagokból dobni egy szánrendszert, de úgy gondolom az elv gyakorlati bemuatása így is sikerült.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 február 18, 07:06
Írta: istvan58 Dátum 2015 február 18, 07:06
En is ilyet használok a gépembe.
Nagyon jól viselkedik. adatlap szerint 300 1/min fellet lépésvesztéskor megál. Nekem az 1.1 verzió van és már 180 1/min fellet működik a lépésvesztés figyelés. Szkópal nézve meg egész lépésel is szinusz szerű áramal hajtja meg a motort. Innen a halk működés. A rezonancia pontokat is jól ki lehet hangolni.
Nagyon jól viselkedik. adatlap szerint 300 1/min fellet lépésvesztéskor megál. Nekem az 1.1 verzió van és már 180 1/min fellet működik a lépésvesztés figyelés. Szkópal nézve meg egész lépésel is szinusz szerű áramal hajtja meg a motort. Innen a halk működés. A rezonancia pontokat is jól ki lehet hangolni.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2015 február 18, 07:06
Írta: ANTAL GÁBOR Dátum 2015 február 18, 07:06
Nem akarom borzolni a kedélyeket igy magánban küldök egy levelet a kísérletedre reagálva
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2015 február 18, 07:51
Írta: Motoros Dátum 2015 február 18, 07:51
A TB6600HG-vel van egy piros paneles verzió is. Én 36V-al próbáltam. Élt kb 1 percet azán láng csapott ki belőle és annyi. Akkor azt hittem biztosan én bénáztam valamit. De lehet hogy nem.
Ic-t sem lehet cserélni rajta mert a panel is galyra ment teljesen...meg minek is ?
Azt gondolom, hogy az IC-t a Toshiba azért tesztelte rendesen, talán az áramköri kapcsolással lehet a baj ??
Ic-t sem lehet cserélni rajta mert a panel is galyra ment teljesen...meg minek is ?
Azt gondolom, hogy az IC-t a Toshiba azért tesztelte rendesen, talán az áramköri kapcsolással lehet a baj ??
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2015 február 18, 08:28
Írta: 4ybj8h3c8 Dátum 2015 február 18, 08:28
2 db. L297 és 3 db. L298 után abban maradtam magammal, hogy saját PIC-es program és FET végfok az egyetlen használható megoldás. 30 év alatt a 297-298 páros volt az első, aminél fogalmam nincs, hogy mit csesztem el, de a tok lángolva égett. Semmire nem jók ezek az integrált végfokok.
Cím: Re:Léptetőmotor
Írta: iiidyyiy3 Dátum 2015 február 18, 08:30
Írta: iiidyyiy3 Dátum 2015 február 18, 08:30
TB67S142
Ez már elég jónak tűnik, de annyira új, h nem nagyon találtok beszerzési forrást az USAn kívül.
50nS lépésjel elég neki, 80V/3A, 0,25ohm belső ellenállás. 6$ az ára, tehát nem vészes, csak az a fránya szállítás...
Ehhez kellene tervezni egy jó nyákot, és aki akarja, az megcsinálhatja másfélszer annyiért magának, mint amennyiért megveheti az msd-t...
Ez már elég jónak tűnik, de annyira új, h nem nagyon találtok beszerzési forrást az USAn kívül.
50nS lépésjel elég neki, 80V/3A, 0,25ohm belső ellenállás. 6$ az ára, tehát nem vészes, csak az a fránya szállítás...
Ehhez kellene tervezni egy jó nyákot, és aki akarja, az megcsinálhatja másfélszer annyiért magának, mint amennyiért megveheti az msd-t...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 február 18, 09:50
Írta: 000000000 Dátum 2015 február 18, 09:50
Tényleg lehet valami ebben az IC hamisításban.
Toshiba rádiófrekvenciás FET-el jártam így, hogy a megadott paraméterek közelébe se tudott eljutni.
furcsán is nézett ki a tokozás és kiszerelés után szinte 0 erőbehatásra ez lett belőle.
Egy félbetört karrier képe :)
Sajnos a fényképezőgép lencséjéhez hozzáért és így a pár milliméterre lévő dolgok már elmosódott lett.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 február 18, 10:01
Írta: 000000000 Dátum 2015 február 18, 10:01
Nekem EZ van, összesen 5db ot rendeltem (nem egyszerre) 1 szer én is így jártam, hogy 1 perc után füst aztán annyi. labortápról ment turbo-cncvel. De a 4db ami a gépemben van rendesen üzemel már egy ideje.
Én valahogy úgy képzelem, hogy nincs tesztelés, vagy ha van is a kiszórják amik rosszok
Én valahogy úgy képzelem, hogy nincs tesztelés, vagy ha van is a kiszórják amik rosszok
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 február 18, 10:05
Írta: 000000000 Dátum 2015 február 18, 10:05
mármint kiszórják a vevőknek
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2015 február 18, 12:32
Írta: svejk Dátum 2015 február 18, 12:32
Biztos hamis az a Toshiba, mert a képen Mitsubishi emléma van. :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 február 18, 12:48
Írta: 000000000 Dátum 2015 február 18, 12:48
Lényegen nem változtat ami xar az az is marad akármit tapmóznak rá.
Cím: Re:Léptetőmotor
Írta: iv43r83d Dátum 2015 február 18, 16:26
Írta: iv43r83d Dátum 2015 február 18, 16:26
Üdv Uraim!Kérdésem még mindig léptetőmotorral kapcsolatos.Egy 8.5Nm-es léptetőmotort meg lehet egy kicsit is mozdítani kézzel a tengelyén lévő kuplongon keresztül? Üdv Csaba.
Cím: Re:Léptetőmotor
Írta: designr Dátum 2015 február 18, 18:12
Írta: designr Dátum 2015 február 18, 18:12
Tartóáram alatt csak erőssen kesztyűvel ráfogva Nick Árpi...üresen kis ellenállással forgatható..
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2015 február 18, 19:41
Írta: svejk Dátum 2015 február 18, 19:41
Ma nem csináltam újabb kísérletet, mérést, mert T45 kissé elvette a kedvem, de arra azért rájöttem, hogy a tegnap mért start-stop frekvencia nem másból adódik mint a motor mechanikai (és elektromos?) időállandójából.
Gépre felrakva ehhez hozzájönne a mechanikai konstrukciótól nagyban függő plusz időállandó.
A tegnapi kísérletben ugye az első esetben amikor 0-ról gyorsítottam egységugrásszerűen, akkor 2,2 kHz jött ki.
Azt elfogadhatjuk alapelvnek, hogy motor lépésvesztés nélkül csak úgy tudja ezt lekövetni ha már az ELSŐ LÉPÉSNÉL ELÉRI ezt a 2,2 kHz által előírt sebességet, és ez nem más mint a start-stop freki, vagy visszaszámolva a 400 lépés/fordulattal 0,45 ms-os léptetési frekvencia azaz ennyi az időállandója a motornak.
A fentiekből adódik, hogy az a motor üresben 330 ford/perces sebességre tud felgyorsulni már az első lépés alkalmával és ha a G kódban ez a sebesség érték van megadva akkor ezzel tartósan megy is.
(itt képbe jöhetne a múltkori Békésivel való csevegésünk)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2015 február 18, 19:46
Írta: svejk Dátum 2015 február 18, 19:46
Persza a tegnapi kísérletem második fele rámutatott, hogy nem ilyen rózsás a helyzet mert pl. ha hirtelen irányváltás van akkor rögtön a felére lesett ez a lépésvesztés nélküli frekvencia.
Ezen kívül még vannak rezonanciák is amik szintén csökkentik ezt az értéket.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2015 február 18, 19:58
Írta: svejk Dátum 2015 február 18, 19:58
Egyébként aki épített már léptetőmotoros gépet még a microstepp előtti időkben az biztos jól emlékszik erre a 300 ford/perces körüli tartományra.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2015 február 18, 20:07
Írta: ANTAL GÁBOR Dátum 2015 február 18, 20:07
István ! nekem meg a dolgokon felbuzdulva ( 2 heti munka !!) sikerült egy 16F 1827 es Pic kel csinálni egy kapcsolást ami a step jel kiadása ELÖTT 100 ms al létrehozza a szán mozgását ( Msd és Msdd ) vezérlőkkel . Igaz vannak még megkötések , de dolgozom... Akit érdekel ingyen el tudom küldeni a hexat [#nevetes1][#nevetes1]
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2015 február 18, 21:28
Írta: s7manbs8 Dátum 2015 február 18, 21:28
A 3D nyomtatóknál rögtön kiderül, jól van e beállítva ez a start stop freki, mert az úgy működik.
Cím: Re:Léptetőmotor
Írta: 0bn8uxmw Dátum 2015 február 18, 22:33
Írta: 0bn8uxmw Dátum 2015 február 18, 22:33
Igen[#wink] a nyomtatóknál alapesetben 20mm/s-os sebesség különbségig nem gyorsít csak "ugrik" a hajtás.
Itt le van írva angolul az amiről megy a vita másfél hete egy másik topicban
Itt le van írva angolul az amiről megy a vita másfél hete egy másik topicban
Cím: Re:Léptetőmotor
Írta: torrente Dátum 2015 február 19, 09:27
Írta: torrente Dátum 2015 február 19, 09:27
Sziasztok, van néhány amatőr kérdésem a tapasztaltabbakhoz.. van egy léptetőmeghajtóm (dq860ma) ami mondjuk 8A áramot tud és van egy léptetőmotorom amin nincsenek feltüntetve az adatok. Meglehetősen nagy darab, és könnyen lehet, hogy nagyobb áramerősséget tud. Tegyük fel 15A.. Ebben az esetben mi fog történni? A motor nem tudja leadni a max teljesítményt, vagy a vezérlőt fogja kinyírni?
Másik kérdés.. a vezérlő 24-60V tartományban működik. A motort le lehet égetni ha túl nagy a feszültség vagy valahogy visszakorlátozza a vezérlő? pl egy nema23-as motor mellé 60V-os tápot kötök.
Köszönöm a hozzászólásokat! Péter
Másik kérdés.. a vezérlő 24-60V tartományban működik. A motort le lehet égetni ha túl nagy a feszültség vagy valahogy visszakorlátozza a vezérlő? pl egy nema23-as motor mellé 60V-os tápot kötök.
Köszönöm a hozzászólásokat! Péter
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 február 19, 09:49
Írta: 000000000 Dátum 2015 február 19, 09:49
Egy motort csak külalakjából, méretéből megitélve az U,I,R villamos adatairól alig lehet valami konkrétat, értelmeset mondani, hiszen ahhoz hogy valamennyire jól saccolni is lehessen, minimum látni kellene a tekercselését. Emiatt javasolnám, ne "tegyél fel semmit".
Ezért nulladik lépésként ismeretlen motornál mérjél, pl. egy Ohm mérővel, így meg tudod állapítani a tekercseinek Ohm-os ellenállását, az már értékes adat, lehet belőle következtetni több más dologra. Ha lenne induktivitás mérőd (gyanítom nincs), az L érték is kimérhető. Ez a két adat már nagyon sok további léptetőmotor méretezési, üzemeltetési tényszámot megalapoz, és segít optimális vezérlő elektronikához illeszteni.
Ezért nulladik lépésként ismeretlen motornál mérjél, pl. egy Ohm mérővel, így meg tudod állapítani a tekercseinek Ohm-os ellenállását, az már értékes adat, lehet belőle következtetni több más dologra. Ha lenne induktivitás mérőd (gyanítom nincs), az L érték is kimérhető. Ez a két adat már nagyon sok további léptetőmotor méretezési, üzemeltetési tényszámot megalapoz, és segít optimális vezérlő elektronikához illeszteni.
Cím: Re:Léptetőmotor
Írta: 0bn8uxmw Dátum 2015 február 19, 11:33
Írta: 0bn8uxmw Dátum 2015 február 19, 11:33
Szia,
Első körben tudni kellene, hány vezetékes az a motor.
Ha jó hozzá a vezérlőd, akkor nem fogja azt kinyírni a motor, max. nem tudja kihajtani magát majd rendesen ha tényleg 15A-re saccolod a motort.
Ahogy Tibor is írta egy multiméterrel kellene első körben a motor vezetékeit megvizsgálni, megkeresni az összetartozó tekercseket és megnézni az ellenállásukat. Az induktivitás megmérése még pontosabb képet adhatna a motor karakterisztikájának kiderítéséhez, ha ez nem kivitelezhető akkor marad a bekötés és próbálkozás.
Mivel azt mondtad nagy a motor, feszültségnek adhatsz neki 60v-ot mondjuk kezdetnek.(szerintem a 80V-tól sem riadna meg a motor de ez már a dq860ma vezérlőd maximuma).
Második kérdésre, a max. motor feszültség számítására, túl nagy fesz esetén képes túlmelegedni a motor és megállni de ha a amperban azt kapja amit az adatlapja szerint bír nem nagyon károsodhat miután visszahűlt.
Max fesz számításra ezt mondják képletnek:
32 * √L = VMAX
A motor induktivitása ugyebár az L.
Irodalom angolul
Első körben tudni kellene, hány vezetékes az a motor.
Ha jó hozzá a vezérlőd, akkor nem fogja azt kinyírni a motor, max. nem tudja kihajtani magát majd rendesen ha tényleg 15A-re saccolod a motort.
Ahogy Tibor is írta egy multiméterrel kellene első körben a motor vezetékeit megvizsgálni, megkeresni az összetartozó tekercseket és megnézni az ellenállásukat. Az induktivitás megmérése még pontosabb képet adhatna a motor karakterisztikájának kiderítéséhez, ha ez nem kivitelezhető akkor marad a bekötés és próbálkozás.
Mivel azt mondtad nagy a motor, feszültségnek adhatsz neki 60v-ot mondjuk kezdetnek.(szerintem a 80V-tól sem riadna meg a motor de ez már a dq860ma vezérlőd maximuma).
Második kérdésre, a max. motor feszültség számítására, túl nagy fesz esetén képes túlmelegedni a motor és megállni de ha a amperban azt kapja amit az adatlapja szerint bír nem nagyon károsodhat miután visszahűlt.
Max fesz számításra ezt mondják képletnek:
32 * √L = VMAX
A motor induktivitása ugyebár az L.
Irodalom angolul
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2015 február 19, 13:39
Írta: ANTAL GÁBOR Dátum 2015 február 19, 13:39
Annyi kiegészítés hogy a linkelt képlet egy tapasztalati összefüggés lehet, mert dimenzionálisan nem stimmel ( L = Vs/A ) Ilyenkor ismerni kell hogy mit helyettesítünk . No mHy kell oda ( az angol lapon szerencsére közlik )
Cím: Re:Léptetőmotor
Írta: s2k5ycubj Dátum 2015 február 19, 14:27
Írta: s2k5ycubj Dátum 2015 február 19, 14:27
Átnéztem a TB6600-as dokumentációját és összehasonlítottam a panellal. Megvan miért szállt el. Első ránézésre fel sem tűnt,de csak 5 dióda van a panelen. A pozitív irányú diódákat szépen lefelejtették a panelról és a kapcsolás köszönő viszonyban sincs a gyártó által ajánlottól. Viszont talán nem nehéz átalakítani. Persze,hogy a rosszul kivitelezett elektronika miatt nem működik megfelelően és gerjed,ezért melegszik is rendesen. És persze mindezt eloxált,alul méretezett és alig hőpasztázott hűtőbordán. Tehát veszek egy új ic-t és átalakítom,meglátjuk mit lehet ebből kihozni. Csak egy-két példa: Árammérő ellenállás 20%-os tűrésű és nem induktivitás mentes,a tápkondi nagyobb értékű(ez talán nem lenne baj) de nem low esr,a meglévő diódák 3A-esek és nem elég gyorsak,viszont egy ilyenen megy sorba a tápfesz és,ha csak 2x 3A van már jön is a füst... Hirtelen első körben ennyi. Fotózok és beszámolok majd az egészről.
Cím: Re:Léptetőmotor
Írta: 2dbfy8y Dátum 2015 február 19, 17:43
Írta: 2dbfy8y Dátum 2015 február 19, 17:43
Ez a tb6600 ic mennyiért szerezhető be?
Full áramon én is egyet elküldtem.
Én bekötésre tippeltem, hogy valamit elszúrtam.
Engemet is érdekelnének a fejlemények.
Akár egyeztethetnénk mailban is.
Lehet engem is érdekelne ic- ha csak ebay-ról lehet beszerezni.
Full áramon én is egyet elküldtem.
Én bekötésre tippeltem, hogy valamit elszúrtam.
Engemet is érdekelnének a fejlemények.
Akár egyeztethetnénk mailban is.
Lehet engem is érdekelne ic- ha csak ebay-ról lehet beszerezni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 február 19, 17:55
Írta: 000000000 Dátum 2015 február 19, 17:55
Hidd el nem kötötted el, ez ennyit tud , de stabilan !
1500+800Ft posta vagy 2700FT Free international shipping.
Tehát NEM rentábilis, mert 3555Ft-ér postával itt van egy ilyen vezérlő és nem kell szívni az azonnal szétégő nyákkal se.
Cím: Re:Léptetőmotor
Írta: iiidyyiy3 Dátum 2015 február 19, 18:01
Írta: iiidyyiy3 Dátum 2015 február 19, 18:01
Sok sikert! Én a piros 4 tengelyessel játszok, de nem tökéletes a nyák topológiája. Minimális átalakítással most már használható, de koránt sem tökéletes, már csak a TB6560 miatt sem. Talán ez a TB6600 nem igényel olyan hatalmas nyákot, lehet hogy célszerű lenne hozzá tervezni (és NEM RAJZOLNI) egy egészen újat, mintsem faragni. Szerintem lennénk itt néhányan, akik utánaépítenénk valamit, ami fényévekkel jobb, ha a kínai árának másfél-kétszeresébe is kerül.
Viszont ha eről közelítjük meg a dolgot, akkor meg TB67S142 vagy url=http://pdf.datasheetcatalog.com/datasheets/toshiba/TB67S149HG.pdf]TB67S149-cel kéne próbálkozni. Usában már beszerezhetőek, és a 6$ nem vészes ár a tudását nézve. (50ns step jel, 80v tápfesz, 3A motoráram, irreleváns tápsorrend).
Bátyám ugyan villamos mérnök, de nincs rá kapacitása, hogy foglalkozzon vele, de könnyen lehetséges, hogy tökéletes topológiához akár 4 rétegű nyák is kellhet.
Viszont ha eről közelítjük meg a dolgot, akkor meg TB67S142 vagy url=http://pdf.datasheetcatalog.com/datasheets/toshiba/TB67S149HG.pdf]TB67S149-cel kéne próbálkozni. Usában már beszerezhetőek, és a 6$ nem vészes ár a tudását nézve. (50ns step jel, 80v tápfesz, 3A motoráram, irreleváns tápsorrend).
Bátyám ugyan villamos mérnök, de nincs rá kapacitása, hogy foglalkozzon vele, de könnyen lehetséges, hogy tökéletes topológiához akár 4 rétegű nyák is kellhet.
Cím: Re:Léptetőmotor
Írta: iiidyyiy3 Dátum 2015 február 19, 18:08
Írta: iiidyyiy3 Dátum 2015 február 19, 18:08
Helyesen a TB67S149 adatlap
Gyorsan megnéztem a TB6600 adatlapot, végül is ez sem rossz, és legalább itthon is beszerezhető.
Gyorsan megnéztem a TB6600 adatlapot, végül is ez sem rossz, és legalább itthon is beszerezhető.
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2015 február 19, 18:29
Írta: B.Zoltán Dátum 2015 február 19, 18:29
A szövegbe mintha azt írná , hogy a TB67S149 unipoláris vezérlő.Ez nem gond,mert a TB6600 az bipoláris.
Cím: Re:Léptetőmotor
Írta: iiidyyiy3 Dátum 2015 február 19, 18:34
Írta: iiidyyiy3 Dátum 2015 február 19, 18:34
Lehet át kellene tenni a témát Bipoláris motor vezérlés topikba...
Cím: Re:Léptetőmotor
Írta: 2dbfy8y Dátum 2015 február 19, 19:41
Írta: 2dbfy8y Dátum 2015 február 19, 19:41
Szóval akkor mennyivel érdemes hajtani?
Vagy megéri még egy ilyent venni?
Vagy mit kell vele csinálni, hogy bírja, jó tanács esetleg?
Vagy megéri még egy ilyent venni?
Vagy mit kell vele csinálni, hogy bírja, jó tanács esetleg?
Cím: Re:Léptetőmotor
Írta: s2k5ycubj Dátum 2015 február 19, 20:43
Írta: s2k5ycubj Dátum 2015 február 19, 20:43
írtam a bipoláris-ba.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 február 19, 21:46
Írta: 000000000 Dátum 2015 február 19, 21:46
Nem szabad megvenni mert egy hulladék, de akinek kell a tanulópénz az vegye nyugodtan.
Ez a HY-DIV268N-5A vezérlő egyszerűen vagy ennyire használhatatlan vagy a kínai már a saját igénytelenségét is hamisítja.
Valaki váltig állítja, nála tökéletes, az én és többek tapasztalata pedig az, hogy egyszerűen a töredéke áramnál is megdöglik.
Mindenki döntsön saját belátása szerint.
Cím: Re:Léptetőmotor
Írta: xabi Dátum 2015 február 23, 14:05
Írta: xabi Dátum 2015 február 23, 14:05
Kb. fél év használat után ma elromlott a saját építésű CNC plazmavágóm egyik tengelye.
AZ Y, és a Z tengely hibátlanul megy továbbra is az X tengely is működik de olyan hangja van mint egy csikorgó harckocsinak, össze vissza rezeg, néha pozitív irány helyett negatívba mozog.
Meghajtás : PC-UC100-HDBB2-MSDD vezérlő, léptető motor.
Nem értek az elektronikához (abszolút semmit). Amit eddig kipróbáltam :
- Az X tengely motorjára közvetlenül rákötöttem az Y-t, a motor hibátlanul megy. Tehát a motor valószínűleg jó.
- A vezérlést és a vezérlő kábelt felcseréltem a hiba fent áll tehát nem a vezérlő vagy a vezérlőhöz érkező PC UC100 jellel van a baj.
- Úgy tűnik egyértelműen hogy a vezérlőből induló és motorba érkező kábellel van baj, de azt meg kimértem nincsen zárlat és mind a 4 ér él.
Mi lehet a probléma ? Mikor csinál ilyen hangot egy léptető motor ?
Köszi, ha válaszol valaki.
AZ Y, és a Z tengely hibátlanul megy továbbra is az X tengely is működik de olyan hangja van mint egy csikorgó harckocsinak, össze vissza rezeg, néha pozitív irány helyett negatívba mozog.
Meghajtás : PC-UC100-HDBB2-MSDD vezérlő, léptető motor.
Nem értek az elektronikához (abszolút semmit). Amit eddig kipróbáltam :
- Az X tengely motorjára közvetlenül rákötöttem az Y-t, a motor hibátlanul megy. Tehát a motor valószínűleg jó.
- A vezérlést és a vezérlő kábelt felcseréltem a hiba fent áll tehát nem a vezérlő vagy a vezérlőhöz érkező PC UC100 jellel van a baj.
- Úgy tűnik egyértelműen hogy a vezérlőből induló és motorba érkező kábellel van baj, de azt meg kimértem nincsen zárlat és mind a 4 ér él.
Mi lehet a probléma ? Mikor csinál ilyen hangot egy léptető motor ?
Köszi, ha válaszol valaki.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 február 23, 15:41
Írta: istvan58 Dátum 2015 február 23, 15:41
a tengelyeknek közös tápja van? Mert ha külön tápok vannak akkor lehet táphiba.
Cím: Re:Léptetőmotor
Írta: xabi Dátum 2015 február 23, 19:10
Írta: xabi Dátum 2015 február 23, 19:10
1 tápon van, mindhárom vezérlő, és motor.
Következőképpen teszteltem :
- először a jel kábeleket cseréltem fel az X-Y tengelyen a vezérlőn. A hiba fent áll. Tehát nem a jel résszel van a baj.
- A motorhoz kimenő kábeleket cseréltem fel az X-Y tengelyen a hiba fenn állt a tengely fordítás után is. Tehát nem a MSDDD vezérlő a hibás.
- Az Y kábelt átkötöttem az X-re így nem volt hiba.
Arra következtettem hogy a kábel a rossz, de azt meg kimértem és minden ér él és egymással nincsenek zárlatba.
Az lehet hogy megtört a kábel és néha átmegy az áram néha nem és ettől van a motornak eszméletlen hangja, rezgése ? Mitől fordul meg a polaritása a motornak néha fordítva indul ?
Holnap megnézem mégegyszer....
Következőképpen teszteltem :
- először a jel kábeleket cseréltem fel az X-Y tengelyen a vezérlőn. A hiba fent áll. Tehát nem a jel résszel van a baj.
- A motorhoz kimenő kábeleket cseréltem fel az X-Y tengelyen a hiba fenn állt a tengely fordítás után is. Tehát nem a MSDDD vezérlő a hibás.
- Az Y kábelt átkötöttem az X-re így nem volt hiba.
Arra következtettem hogy a kábel a rossz, de azt meg kimértem és minden ér él és egymással nincsenek zárlatba.
Az lehet hogy megtört a kábel és néha átmegy az áram néha nem és ettől van a motornak eszméletlen hangja, rezgése ? Mitől fordul meg a polaritása a motornak néha fordítva indul ?
Holnap megnézem mégegyszer....
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2015 február 23, 19:14
Írta: 4ybj8h3c8 Dátum 2015 február 23, 19:14
Milyen csatlakozót használsz? Jártam már úgy, hogy becsúszott az egyik pólus, és nem ért össze a két oldal.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2015 február 23, 19:29
Írta: s7manbs8 Dátum 2015 február 23, 19:29
Ha a motor vezeték közül egyik nem vezet át pl. akkor is így dadog. Valamelyik fázis amiatt kihagy, ha bipolársi, akkor kettő is.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2015 február 23, 19:30
Írta: s7manbs8 Dátum 2015 február 23, 19:30
Ha egyenként tudod léptetni, akkor valamelyik lépés utána a motor elenged, így meg tudod ezt nézni is.
Cím: Re:Léptetőmotor
Írta: xabi Dátum 2015 február 24, 08:18
Írta: xabi Dátum 2015 február 24, 08:18
Köszi a segítséget. Megtaláltam a "dadogás" okát az egyik "fázis" a csatlakozónál beégett (nem lehetett látni), néha ment néha nem..
Köszi még egyszer.
Köszi még egyszer.
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2015 március 03, 14:26
Írta: KBalázs Dátum 2015 március 03, 14:26
A léptetőmotoroknál a beállási pontosság (pl. 3..5%) egész lépésenként, névleges terhelésen vagy üresben értendő?
Tehát a gyártás ennyire bizonytalan, hogy 5% hibával tudják legyártani, amin még ront a statikus terhelés is (Z esetén pl.)? (Persze felfogom hogy ez egy átlagos (1.8 fok/step) motornál 0.09 fok szöghiba.)
Tehát a gyártás ennyire bizonytalan, hogy 5% hibával tudják legyártani, amin még ront a statikus terhelés is (Z esetén pl.)? (Persze felfogom hogy ez egy átlagos (1.8 fok/step) motornál 0.09 fok szöghiba.)
Cím: Re:Léptetőmotor
Írta: cytn7nv98 Dátum 2015 március 30, 20:38
Írta: cytn7nv98 Dátum 2015 március 30, 20:38
Sziasztok!
Érdeklődnék, hogy alábbi motorokról tudnátok-e nyilatkozni.
1.9Nm Léptetőmotor 2db lenne belőle
4Nm Léptetőmotor 1db lenne belőle
Hobby CNC maróba megfelelőek lennének?
Nem találtam a neten sokmindent róluk, csak ami itt szerepel. Ez alapján nem tudom eldönteni, hogy erejük, gyorsulások megfelelő lenne-e számomra. (léptető motor korlátaival tisztában vagyok, de nem szeretnék mellényúlni) Kb egy 30Kg-os hid mozgatású gép lenne ~500x400x150mm-es munkatérrel.
Először ismerkedem csak a CNC építéssel később valószínű váltok AC servo-ra.
Milyen vezérlőt ajánlatok hozzájuk, illetve tápegységnél is bizonytalan vagyok... bár az vezérlő függő.
Nem ismerem a fórum eldugott zugait, így ha lenne léptetőmotorokról egy tájékoztató, vagy méretezési segédlet azt megköszönném!
Érdeklődnék, hogy alábbi motorokról tudnátok-e nyilatkozni.
1.9Nm Léptetőmotor 2db lenne belőle
4Nm Léptetőmotor 1db lenne belőle
Hobby CNC maróba megfelelőek lennének?
Nem találtam a neten sokmindent róluk, csak ami itt szerepel. Ez alapján nem tudom eldönteni, hogy erejük, gyorsulások megfelelő lenne-e számomra. (léptető motor korlátaival tisztában vagyok, de nem szeretnék mellényúlni) Kb egy 30Kg-os hid mozgatású gép lenne ~500x400x150mm-es munkatérrel.
Először ismerkedem csak a CNC építéssel később valószínű váltok AC servo-ra.
Milyen vezérlőt ajánlatok hozzájuk, illetve tápegységnél is bizonytalan vagyok... bár az vezérlő függő.
Nem ismerem a fórum eldugott zugait, így ha lenne léptetőmotorokról egy tájékoztató, vagy méretezési segédlet azt megköszönném!
Cím: Re:Léptetőmotor
Írta: xit3medzv Dátum 2015 március 30, 20:53
Írta: xit3medzv Dátum 2015 március 30, 20:53
Megmunkálási paramétereket kéne írnod, hogy erre majd valaki érdemben tudjon válaszolni. (anyag, szerszám átmérő...) :)
Cím: Re:Léptetőmotor
Írta: cytn7nv98 Dátum 2015 március 30, 21:13
Írta: cytn7nv98 Dátum 2015 március 30, 21:13
Nem akartalak már ezzel is zavarni, ezért írtam ide. :)
Megmunkálás, fa, alumínium, szerszám átmérő max 8-10mm már ha elbírja, de kompromisszumot tudok kötni. Most a cél az, hogy a váz és a tengelyek első osztályún legyenek majd megépítve. Igaz ez tolódik, de az elektronikai résszel tudnék addig legózni.
Itthon akad pár dolog, és addig a kapcsoló szekrényt megcsinálnám. No meg a CAD-CAM részre is kell gyúrnom így van mivel elütni az időt míg lesz valami a gépből. Hiányos tudásom viszont szeretném pótolni, de gondolom itt sem mindenki profiként kezdte. :)
Megmunkálás, fa, alumínium, szerszám átmérő max 8-10mm már ha elbírja, de kompromisszumot tudok kötni. Most a cél az, hogy a váz és a tengelyek első osztályún legyenek majd megépítve. Igaz ez tolódik, de az elektronikai résszel tudnék addig legózni.
Itthon akad pár dolog, és addig a kapcsoló szekrényt megcsinálnám. No meg a CAD-CAM részre is kell gyúrnom így van mivel elütni az időt míg lesz valami a gépből. Hiányos tudásom viszont szeretném pótolni, de gondolom itt sem mindenki profiként kezdte. :)
Cím: Re:Léptetőmotor
Írta: xit3medzv Dátum 2015 március 30, 21:39
Írta: xit3medzv Dátum 2015 március 30, 21:39
:) 2élű 10mm-es maró, 3mm mélyen, forgácsolásra alkalmas alu. ötvözetben telibe ~300N előtolási erőt igényel kb. (jó minőségű keményfém szerszám, kenés/hűtés).
1.9Nm nyomaték, 5mm-es emelkedésű orsóval 2388N erőt fejt ki (surlódást nem számolva). Ugyanez 10mm-es orsóval 1194N. (Megjegyzem ez a művelet 10mm-es maróval elég brutális vázat kíván.) Tehát 10mm-es orsóval is majdnem 4x akkora a rendelkezésre álló forgató nyomaték, mint a művelet elméleti igénye. Léptető motor max. 600-700 1/percre képes. 5mm-es orsóval 3m/perc, 10mm-es emelkedésűvel 6m/perc (tipikusan egy ekkora gépen 3m/perc elég sztem.). Gyorsulásnak sztem. nincs jelentősége egy ilyen alkalmazásban léptetőnél, 1-2m/s2, kikisérletezed ha mozog a gép, 30kg-os híddal úgysem fogsz rekordot dönteni, nem is kell. Remélem más is beleszól, ha elszámoltam valamit..
1.9Nm nyomaték, 5mm-es emelkedésű orsóval 2388N erőt fejt ki (surlódást nem számolva). Ugyanez 10mm-es orsóval 1194N. (Megjegyzem ez a művelet 10mm-es maróval elég brutális vázat kíván.) Tehát 10mm-es orsóval is majdnem 4x akkora a rendelkezésre álló forgató nyomaték, mint a művelet elméleti igénye. Léptető motor max. 600-700 1/percre képes. 5mm-es orsóval 3m/perc, 10mm-es emelkedésűvel 6m/perc (tipikusan egy ekkora gépen 3m/perc elég sztem.). Gyorsulásnak sztem. nincs jelentősége egy ilyen alkalmazásban léptetőnél, 1-2m/s2, kikisérletezed ha mozog a gép, 30kg-os híddal úgysem fogsz rekordot dönteni, nem is kell. Remélem más is beleszól, ha elszámoltam valamit..
Cím: Re:Léptetőmotor
Írta: xit3medzv Dátum 2015 március 30, 22:11
Írta: xit3medzv Dátum 2015 március 30, 22:11
Annyiban finomítanék, hogy a gyorsulásnak természetesen van jelentősége, de nem érdemes számolgatni, ha nem akarsz áttételt beépíteni (mintha valahol írtad volna). Nem ez lesz a szűk keresztmetszete a rendszernek.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 március 30, 22:16
Írta: 000000000 Dátum 2015 március 30, 22:16
Ez a 300 N előtolási erő soknak tűnik.
Eleve nem írtál előtolási sebességet. Mekkora előtolásra gondolnád ezt az erőt?
Eleve nem írtál előtolási sebességet. Mekkora előtolásra gondolnád ezt az erőt?
Cím: Re:Léptetőmotor
Írta: xit3medzv Dátum 2015 március 30, 22:29
Írta: xit3medzv Dátum 2015 március 30, 22:29
1.3mm-es forgács leválasztással számoltam, 5000 1/p fordulat, 1300cm/perc előtolás. Kicsit erős, de méretezéshez gondoltam nem árt túlozni.
Cím: Re:Léptetőmotor
Írta: xit3medzv Dátum 2015 március 30, 22:30
Írta: xit3medzv Dátum 2015 március 30, 22:30
0.13mm az 1.3mm helyett.
Cím: Re:Léptetőmotor
Írta: cytn7nv98 Dátum 2015 március 30, 22:54
Írta: cytn7nv98 Dátum 2015 március 30, 22:54
Köszönöm!
Milyen vezérlő javallott ezekhez a motorokhoz ha megkérdezhetem? Nem szeretnék túl "gagyit" sem és túllőni sem anyagi oldalon. Persze ha van értelme a többlet költségnek akkor nem kérdés, inkább a minőséget választom, ha jár vele plusz szolgáltatás. Leválasztót már megrendeltem 3v1-es lesz, kábelek beszerzése folyamatban. Később ha esetleg valami gubanc lenne LPT-n akkor UC300-al könnyen össze lehet fűzni és nem kell ezen agyalni. A PC olcsóbb lesz mint a mozgásvezérlő, így nem is azt féltem. :)
Motor elhelyezés mindegy, vagy érdemes a nagyot Y tengelyre tenni, vagy a két egyforma legyen X és Y tengelyen? Többit majd személyesen, mert ez már lehet félig off.
Milyen vezérlő javallott ezekhez a motorokhoz ha megkérdezhetem? Nem szeretnék túl "gagyit" sem és túllőni sem anyagi oldalon. Persze ha van értelme a többlet költségnek akkor nem kérdés, inkább a minőséget választom, ha jár vele plusz szolgáltatás. Leválasztót már megrendeltem 3v1-es lesz, kábelek beszerzése folyamatban. Később ha esetleg valami gubanc lenne LPT-n akkor UC300-al könnyen össze lehet fűzni és nem kell ezen agyalni. A PC olcsóbb lesz mint a mozgásvezérlő, így nem is azt féltem. :)
Motor elhelyezés mindegy, vagy érdemes a nagyot Y tengelyre tenni, vagy a két egyforma legyen X és Y tengelyen? Többit majd személyesen, mert ez már lehet félig off.
Cím: Re:Léptetőmotor
Írta: xit3medzv Dátum 2015 március 30, 23:00
Írta: xit3medzv Dátum 2015 március 30, 23:00
Nem tudok a vezérlő kiválasztásában segíteni, nekem MSD van, működik, biztos van jobb, lejebb nem adnám. Azt kéne eldönteni mennyit szánsz rá.
Cím: Re:Léptetőmotor
Írta: xit3medzv Dátum 2015 március 30, 23:03
Írta: xit3medzv Dátum 2015 március 30, 23:03
Nagyobb motor - nagyobb tömeg, az vonszolja a hidat. Ilyen híd tömegnél, nézd meg nem lenne-e könyebb az asztalt mozgatni?
Cím: Re:Léptetőmotor
Írta: cytn7nv98 Dátum 2015 március 30, 23:27
Írta: cytn7nv98 Dátum 2015 március 30, 23:27
Igazad van, a híd tömege még változni fog és remélhetőleg könnyebb lesz. Valószínű eltúloztam a méretezéskor mikor 5mm-es vas lemezből számoltam hajtásokkal merevítve .
Cím: Re:Léptetőmotor
Írta: xit3medzv Dátum 2015 március 30, 23:31
Írta: xit3medzv Dátum 2015 március 30, 23:31
5mm nem túlzás. Meg kéne fogalmazni a célt. Lehet cél a lenti forgácsolási példát kiszolgáló váz. Akkor 10mm-es lemezből indulnék ki.
Cím: Re:Léptetőmotor
Írta: cytn7nv98 Dátum 2015 március 31, 07:45
Írta: cytn7nv98 Dátum 2015 március 31, 07:45
Cél alatt mit értesz?
Adatok pontos megadása, hogy a paramétereket ki lehessen számítani, vagy a marógép felhasználási céljának meghatározása?
Hobby célra szánnám, így nem fogom és nem is akarom a profi gépek specifikációit utolérni.
Fa és puhafém megmunkálás szimpatikusabb és gyengébb gép is ki tudja szolgálni gondolom mintha acélt munkálnék meg.
Sok helyen látom, hogy alu-profilból csinálnak gépet, én szeretném az asztalt és annak tartóját vasból megcsinálni, hogy legyen némi tömege és gondolom ez a stabilitásnak sem árt. Rezgéseket is gondolom jobban elnyeli, mint egy 10kg-os alu-profil váz. A híd anyaga ha nem fontos lehet alumínium is, de nem tudom milyen kompromisszumot kell kötni. Ha nehéz akkor jobbal elnyeli gondolom a rezgéseket, stabilabb de nagyobb erő kell a megmozdításához, így gondolom ugyanazzal a motorral kisebb gyorsulást érnék el. Ha túl könnyű, akkor gondolom az sem szerencsés. Alumíniumból milyen méret az amit már lehetne hobbi célú gépre ajánlani fenti felhasználási területre. Gondolom egy 10mm-es vaslemezes tartóval 20mm vastag alumínium nem veszi fel a versenyt. Alakítani biztos fogok rajta így csak némi támpont kellene, hogy merre induljak, milyen anyagból dolgozzak, hogy ne nyúljak nagyon mellé, viszont ehhez a témához nem találtam topikot.
Adatok pontos megadása, hogy a paramétereket ki lehessen számítani, vagy a marógép felhasználási céljának meghatározása?
Hobby célra szánnám, így nem fogom és nem is akarom a profi gépek specifikációit utolérni.
Fa és puhafém megmunkálás szimpatikusabb és gyengébb gép is ki tudja szolgálni gondolom mintha acélt munkálnék meg.
Sok helyen látom, hogy alu-profilból csinálnak gépet, én szeretném az asztalt és annak tartóját vasból megcsinálni, hogy legyen némi tömege és gondolom ez a stabilitásnak sem árt. Rezgéseket is gondolom jobban elnyeli, mint egy 10kg-os alu-profil váz. A híd anyaga ha nem fontos lehet alumínium is, de nem tudom milyen kompromisszumot kell kötni. Ha nehéz akkor jobbal elnyeli gondolom a rezgéseket, stabilabb de nagyobb erő kell a megmozdításához, így gondolom ugyanazzal a motorral kisebb gyorsulást érnék el. Ha túl könnyű, akkor gondolom az sem szerencsés. Alumíniumból milyen méret az amit már lehetne hobbi célú gépre ajánlani fenti felhasználási területre. Gondolom egy 10mm-es vaslemezes tartóval 20mm vastag alumínium nem veszi fel a versenyt. Alakítani biztos fogok rajta így csak némi támpont kellene, hogy merre induljak, milyen anyagból dolgozzak, hogy ne nyúljak nagyon mellé, viszont ehhez a témához nem találtam topikot.
Cím: Re:Léptetőmotor
Írta: xit3medzv Dátum 2015 március 31, 18:42
Írta: xit3medzv Dátum 2015 március 31, 18:42
"váz és a tengelyek első osztályún legyenek majd megépítve"
ezt írtad, ez nem túl egzakt műszakilag, de feltételeztem, hogy egy tervezési feladat kerül megvalósításra mielőtt elkezded építeni a vázat, kitűzöl egy célt, végig viszed és ez alapján osztályozod az eredményt.
Lent eljutottunk oda, hogy a motorok szélsőséges elképzeléseket is valóra tudnak váltani, elvileg 10mm-es maróval lehet rabolni alumíniumban. Ahhoz, hogy a motorok teljesítményét kihasználd olyan brutál vázat kellene építeni, amit nem szeretnél (érthető). Akkor ki kell tűzni egy alacsonyabban lévő célt. 150N-nal lehet vadulni egy 6-os maróval, korlátokkal el lehet menni akár 10-esig, reális célkitűzés lehet, hogy olyan vázat építesz, aminek a válasza egy 150N-os terhelésre a szerszámon, 0.1mm kimozdulás. Ez nem fogja azt jelenteni, hogy ilyen pontosan fogsz tudni dolgozni, simítással töredék igénybevétel keletkezik, töredék kimozdulással. Írtad, hogy CAD programmal szeretnél ismerkedni, akkor egy oktató anyag átrágása után a géped vázának a megtervezése és az igénybevételek szimulálása nem túl bonyolult mondjuk SolidWorks-el (Elég csak a szerkezetet modellezni.). Megtervezed a vázat kb. 150N/0.05mm kimozdulásra és mire elkészül, ha 0.1mm-t tudod tartani, akkor első osztályú munkát végeztél.
De ez csak a kis része volt a kérdéseknek, amiben döntened kell. Ki kell tűzni célnak a váz geometriai pontosságát. Marod, köszörülöd, hegeszted, csavarozod? Orsók kiválasztásánál elfogadod a kínai golyós anyák 0.0xmm játékát, duplán, feszítve építed be? Vezetékeket vállnak szorítod, simán felcsavarozod? És ez még messze a hobbi kategória. Kb. ilyen sokszínűek itt az "Épül a gépem.." topikok.
Ja és el kell döntened milyen lesz a marómotorod, milyen fordulatszám tartományban fogsz dolgozni, mekkora tartományt akarsz átfogni, ez is attól függ mi a cél? Döntően kis átmérőjű szerszámmal dolgozni dinamikusan az nagy fordulatot igényel...
Nem akarlak összezavarni, de érdemes tisztán látni, hogy mik a lehetőségek ebban a műfajban.
[#eljen]
ezt írtad, ez nem túl egzakt műszakilag, de feltételeztem, hogy egy tervezési feladat kerül megvalósításra mielőtt elkezded építeni a vázat, kitűzöl egy célt, végig viszed és ez alapján osztályozod az eredményt.
Lent eljutottunk oda, hogy a motorok szélsőséges elképzeléseket is valóra tudnak váltani, elvileg 10mm-es maróval lehet rabolni alumíniumban. Ahhoz, hogy a motorok teljesítményét kihasználd olyan brutál vázat kellene építeni, amit nem szeretnél (érthető). Akkor ki kell tűzni egy alacsonyabban lévő célt. 150N-nal lehet vadulni egy 6-os maróval, korlátokkal el lehet menni akár 10-esig, reális célkitűzés lehet, hogy olyan vázat építesz, aminek a válasza egy 150N-os terhelésre a szerszámon, 0.1mm kimozdulás. Ez nem fogja azt jelenteni, hogy ilyen pontosan fogsz tudni dolgozni, simítással töredék igénybevétel keletkezik, töredék kimozdulással. Írtad, hogy CAD programmal szeretnél ismerkedni, akkor egy oktató anyag átrágása után a géped vázának a megtervezése és az igénybevételek szimulálása nem túl bonyolult mondjuk SolidWorks-el (Elég csak a szerkezetet modellezni.). Megtervezed a vázat kb. 150N/0.05mm kimozdulásra és mire elkészül, ha 0.1mm-t tudod tartani, akkor első osztályú munkát végeztél.
De ez csak a kis része volt a kérdéseknek, amiben döntened kell. Ki kell tűzni célnak a váz geometriai pontosságát. Marod, köszörülöd, hegeszted, csavarozod? Orsók kiválasztásánál elfogadod a kínai golyós anyák 0.0xmm játékát, duplán, feszítve építed be? Vezetékeket vállnak szorítod, simán felcsavarozod? És ez még messze a hobbi kategória. Kb. ilyen sokszínűek itt az "Épül a gépem.." topikok.
Ja és el kell döntened milyen lesz a marómotorod, milyen fordulatszám tartományban fogsz dolgozni, mekkora tartományt akarsz átfogni, ez is attól függ mi a cél? Döntően kis átmérőjű szerszámmal dolgozni dinamikusan az nagy fordulatot igényel...
Nem akarlak összezavarni, de érdemes tisztán látni, hogy mik a lehetőségek ebban a műfajban.
[#eljen]
Cím: Re:Léptetőmotor
Írta: cytn7nv98 Dátum 2015 március 31, 21:24
Írta: cytn7nv98 Dátum 2015 március 31, 21:24
Köszi így már érthető.
Rövid leszek, többit szóban... [#wink]
Sík köszörült felület, vállra ütköztetés a léceknek, dupla anyás golyós orsó, csavaros kötés + helyező tüskék a híd összeépítésénél a terv.
Rövid leszek, többit szóban... [#wink]
Sík köszörült felület, vállra ütköztetés a léceknek, dupla anyás golyós orsó, csavaros kötés + helyező tüskék a híd összeépítésénél a terv.
Cím: Re:Léptetőmotor
Írta: dezso74 Dátum 2015 április 12, 12:42
Írta: dezso74 Dátum 2015 április 12, 12:42
Szia Mindenkinek!
Szeretnék segítséget kérni. Épülőben van egy cnc vezérlésre tervezett gép, ahhoz szeretnék vezérlést találni, ami jól és megbízhatóan működik. x,y,z tengely 3Nm-es motorokkal hajtva. Referenciapont kapcsolókkal. Már több kapcsolást is begyűjtöttem, de nem tudom melyik lenne az ideális. Segítséget előre is köszönöm.
Szeretnék segítséget kérni. Épülőben van egy cnc vezérlésre tervezett gép, ahhoz szeretnék vezérlést találni, ami jól és megbízhatóan működik. x,y,z tengely 3Nm-es motorokkal hajtva. Referenciapont kapcsolókkal. Már több kapcsolást is begyűjtöttem, de nem tudom melyik lenne az ideális. Segítséget előre is köszönöm.
Cím: Re:Léptetőmotor
Írta: m0cpb8m3 Dátum 2015 április 14, 15:10
Írta: m0cpb8m3 Dátum 2015 április 14, 15:10
Szerintetek az miért lehet, hogy amint a főorsót elindítom elkezd az egyik léptetőmotorom téveszteni. Ha a főorsó ki van kapcsolva, és végigmegy a program akárhányszor is ismétlem pontosan visszaáll a nullpontra. Ha a főorsó elindul de nincs fogásmélység és úgy megy a program azaz továbbra sem terhelem a motorokat azonnal tévedni kezd. Csak az egyik motorral van bajom. A motor lehet vajon rossz vagy a vezérlője?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 április 14, 15:44
Írta: 000000000 Dátum 2015 április 14, 15:44
Szia,
Valószínű zavart okoz a főorsó, vagy inkább a frekiváltó ha azzal hajtod. Egy zavarszűrő a megoldás a frekiváltó elé.
Üdv
Valószínű zavart okoz a főorsó, vagy inkább a frekiváltó ha azzal hajtod. Egy zavarszűrő a megoldás a frekiváltó elé.
Üdv
Cím: Re:Léptetőmotor
Írta: m0cpb8m3 Dátum 2015 április 14, 17:58
Írta: m0cpb8m3 Dátum 2015 április 14, 17:58
Ez egy sima asszinkron motor frekiváltó nélkül. Ami furcsa hogy mostanáig nem csinálta. Én is valamilyen zavarra gondoltam. Esetleg volna valamilyen javaslat zavarszűrőre? Nem igazán ismerem ezeket. Köszi.
Cím: Re:Léptetőmotor
Írta: s2k5ycubj Dátum 2015 április 14, 18:12
Írta: s2k5ycubj Dátum 2015 április 14, 18:12
Nézd meg a motorkábelt és a motort is,ez kontakthibára utal. Jártam már úgy 3f motorral,hogy csak menet közben,terheléskor jelentkezett a hiba,az rezonált és forró volt. De álló helyben hiába mértem,persze a kalapács segített a hibafeltárásban,mert már más nem maradt. De a motorcserével egyből jó lett...
Cím: Re:Léptetőmotor
Írta: s2k5ycubj Dátum 2015 április 14, 18:15
Írta: s2k5ycubj Dátum 2015 április 14, 18:15
Ja és a kapcsolóját is nézd meg! Egy igazi sokol rádióval gyerekjáték az ilyen hibákat felderíteni. De kinek van még olyanja...[#nemtudom]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 április 14, 18:22
Írta: 000000000 Dátum 2015 április 14, 18:22
Például nekem :)
Azzal kerestük a földben lévő csövek nyomvonalát.
Egy kis 100 Wattos frekvenciaváltóval meghajtottam egy biztonsági trafót a vízóránál rá lett téve a szekunder egyik vége a kerti csapnál a másik 1.5 Hz-el hajtva szépen jött a cső fölött a PWM frekvencia a Sokolon.
De erre építtettem már egy pofon egyszerű áramkört ami egy 9 Voltos elemmel ugyanezt csinálja :)
Cím: Re:Léptetőmotor
Írta: s2k5ycubj Dátum 2015 április 14, 18:25
Írta: s2k5ycubj Dátum 2015 április 14, 18:25
De az eredeti sokol-nál úgy sem lehet jobbat csinálni![#nevetes1][#nevetes1][#nevetes1]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 április 14, 18:29
Írta: 000000000 Dátum 2015 április 14, 18:29
Nem a Sokolt váltottam ki hanem a frekiváltó trafó kombinációt :)
A Sokol felülmúlhatatlan ha zavart kell össze szedni :D
Cím: Re:Léptetőmotor
Írta: m0cpb8m3 Dátum 2015 április 14, 19:08
Írta: m0cpb8m3 Dátum 2015 április 14, 19:08
Köszi, holnap átnézek mindent.
Cím: Re:Léptetőmotor
Írta: Borcz Dátum 2015 április 19, 20:23
Írta: Borcz Dátum 2015 április 19, 20:23
Sziasztok.
Lehetséges a léptetőmotorokat folyamatos 200ford/perc sebességgel hajtani? Azt hallottam hogy nem. Mi ennek az oka?
Milyen motorral lehetne helyettesíteni? Sima villanymotorral áttétellel?
Előre is köszönöm
Borcz
Lehetséges a léptetőmotorokat folyamatos 200ford/perc sebességgel hajtani? Azt hallottam hogy nem. Mi ennek az oka?
Milyen motorral lehetne helyettesíteni? Sima villanymotorral áttétellel?
Előre is köszönöm
Borcz
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2015 április 19, 20:41
Írta: ANTAL GÁBOR Dátum 2015 április 19, 20:41
Keresd meg az adott léptetőmotor nyomaték fordulatszám adatlapját ( paraméter a vezérlő tápfesz stb ) Azt fogod látni hogy igenis lehet ! Persze ha van valós munkapont a görbén.
M motor > M terhelés Normál esetben a motort fel kell pörgetni amihez idő kell. A motor nem szöcske de vannak kollégák akik ( bizonyos feltételek teljesülése esetén) tudják ugratni . Ha rám hallgatsz akkor szépen rámpával fölgyorsítod ....
M motor > M terhelés Normál esetben a motort fel kell pörgetni amihez idő kell. A motor nem szöcske de vannak kollégák akik ( bizonyos feltételek teljesülése esetén) tudják ugratni . Ha rám hallgatsz akkor szépen rámpával fölgyorsítod ....
Cím: Re:Léptetőmotor
Írta: Borcz Dátum 2015 április 19, 20:50
Írta: Borcz Dátum 2015 április 19, 20:50
Terhelés szempontjából nem lenne rajta sok. Az lenne a fontos hogy terheléshatására se lassuljon.
Napi 6 óra üzemre gondoltam.
Napi 6 óra üzemre gondoltam.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 április 19, 21:28
Írta: istvan58 Dátum 2015 április 19, 21:28
Nyugottan foroghat akkár egész nap. Arra kel figyelni hogy lehetüleg ne legyen melegebb 60-70 foknál. Akkár hüteni is lehet ha kell.
Cím: Re:Léptetőmotor
Írta: Borcz Dátum 2015 április 19, 21:35
Írta: Borcz Dátum 2015 április 19, 21:35
Köszönöm szépen.
Cím: Re:Léptetőmotor
Írta: s2k5ycubj Dátum 2015 április 19, 23:05
Írta: s2k5ycubj Dátum 2015 április 19, 23:05
Csak ennek is az a lelke,mint szinte mindennek,a túlméretezés! Régen még tudták és használták ezt a bevált receptet,ezért is működtek olyan sokáig a dolgok...
Cím: Re:Léptetőmotor
Írta: Borcz Dátum 2015 április 20, 21:37
Írta: Borcz Dátum 2015 április 20, 21:37
Igaz.
Nem is szeretném alul méretezni.
Egy motorról lenne szó. Van valami kis vezérlő egység ilyennek?
Nem is szeretném alul méretezni.
Egy motorról lenne szó. Van valami kis vezérlő egység ilyennek?
Cím: Re:Léptetőmotor
Írta: s2k5ycubj Dátum 2015 április 20, 21:48
Írta: s2k5ycubj Dátum 2015 április 20, 21:48
Persze,rengeteg van készen. Ha a felét elhiszed,mint amit ráírnak,akkor működhet.
e-bay
e-bay
Cím: Re:Léptetőmotor
Írta: s2k5ycubj Dátum 2015 április 20, 21:51
Írta: s2k5ycubj Dátum 2015 április 20, 21:51
Talán nemsokára elkészül a módosított TB6600-as vezérlőm. Próbanyákon elég ígéretes,most tervezem a végleges verziót. Ha kész lesz érdekelhet?
Cím: Re:Léptetőmotor
Írta: Borcz Dátum 2015 április 20, 21:58
Írta: Borcz Dátum 2015 április 20, 21:58
Igen érdekel.
Sőt. Inkább egy megbízható vezérlőre van szükség.
Hogy állsz vele?
Sőt. Inkább egy megbízható vezérlőre van szükség.
Hogy állsz vele?
Cím: Re:Léptetőmotor
Írta: s2k5ycubj Dátum 2015 április 20, 23:05
Írta: s2k5ycubj Dátum 2015 április 20, 23:05
Lassan halad,de a héten megpróbálok eljutni a panel gyártásig,szerencsére gép van hozzá.
Cím: Re:Léptetőmotor
Írta: m0cpb8m3 Dátum 2015 április 22, 18:57
Írta: m0cpb8m3 Dátum 2015 április 22, 18:57
Áts László. Az volt amit mondtál, és egy kábel volt kilazulva. Köszi szépen!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 április 26, 12:27
Írta: 000000000 Dátum 2015 április 26, 12:27
Van valamilyen tapasztalati képlet, hogy milyen géphez milyen (hány amperes) bipoláris motor kell?
Egy plazmavágó fejet mozgató gépet szeretnék építeni.
Egy plazmavágó fejet mozgató gépet szeretnék építeni.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2015 április 27, 06:20
Írta: Szalai György Dátum 2015 április 27, 06:20
Nincs.
Cím: Re:Léptetőmotor
Írta: 0bn8uxmw Dátum 2015 április 27, 07:08
Írta: 0bn8uxmw Dátum 2015 április 27, 07:08
Mivel forgácsolási erőt nem végzel a plazmával így csak szinte a "vasat" kell mozgatnod ott is főleg a híd súlya a mérvadó és hogy milyen hajtással oldod meg(szíj vagy fogasléc, z-re marad az orsó).
Dönts el mekkora asztal kell neked méretben, abból lehet saccolni a híd súlyára(alu vagy acél-ból akarod?). Ehhez már lehet számolni szükséges motor méretet.
Itt egy videó ötletadónak hogy is nézhet ki egy ilyen plazma asztal, bár ez szervo hajtásos de az ne zavarjon minden mechanikai részét megmutogatják.
Dynatorch
Szerintem a végén kb. egy hasonló 3A-es 3Nm-es kit-nél fogsz kikötni.
Dönts el mekkora asztal kell neked méretben, abból lehet saccolni a híd súlyára(alu vagy acél-ból akarod?). Ehhez már lehet számolni szükséges motor méretet.
Itt egy videó ötletadónak hogy is nézhet ki egy ilyen plazma asztal, bár ez szervo hajtásos de az ne zavarjon minden mechanikai részét megmutogatják.
Dynatorch
Szerintem a végén kb. egy hasonló 3A-es 3Nm-es kit-nél fogsz kikötni.
Cím: Re:Léptetőmotor
Írta: 0bn8uxmw Dátum 2015 április 27, 07:09
Írta: 0bn8uxmw Dátum 2015 április 27, 07:09
Cím: Re:Léptetőmotor
Írta: 0bn8uxmw Dátum 2015 április 27, 07:11
Írta: 0bn8uxmw Dátum 2015 április 27, 07:11
Persze a videót is sikerült úgy beraknom, hogy nem az elejéről kezdi tekerd vissza.... megyek csinálok egy kv-t..
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 április 27, 08:18
Írta: 000000000 Dátum 2015 április 27, 08:18
Nagyon köszönöm a a segítő hozzászólásodat és a linkelt videót.
Cím: Re:Léptetőmotor
Írta: xabi Dátum 2015 április 30, 23:18
Írta: xabi Dátum 2015 április 30, 23:18
Léptető motornál ha kb.: azonos nyomatékot tud melyik a jobb választás ?
Fázis áram 2.8A -- Fázis ellenállás 1.5ohm -- fázis indukció 6.8Mh -- Fázis feszültség 4.2V
vagy
Fázis áram 4A -- Fázis ellenállás 0.7ohm -- fázis indukció 3Mh -- Fázis feszültség 2.8V
A fázis ellenállás, fázis feszültség, fázis indukció mit befolyásol?
A kérdésből következik hogy nagyon nem vagyok elektromos szaki :)
DM556D 5.6A/50V vezérlőm van és 46V kapcsolóüzemű tápról hajtom a motorokat.
Fázis áram 2.8A -- Fázis ellenállás 1.5ohm -- fázis indukció 6.8Mh -- Fázis feszültség 4.2V
vagy
Fázis áram 4A -- Fázis ellenállás 0.7ohm -- fázis indukció 3Mh -- Fázis feszültség 2.8V
A fázis ellenállás, fázis feszültség, fázis indukció mit befolyásol?
A kérdésből következik hogy nagyon nem vagyok elektromos szaki :)
DM556D 5.6A/50V vezérlőm van és 46V kapcsolóüzemű tápról hajtom a motorokat.
Cím: Re:Léptetőmotor
Írta: 0bn8uxmw Dátum 2015 május 01, 06:17
Írta: 0bn8uxmw Dátum 2015 május 01, 06:17
A 4A-es-re szavaznék. Kisebb ellenállás- kevésbé melegszik, indukció is kisebb (áram lecsengése a tekercsben) a dinamikusságot befolyásolja pozitívan, alacsonyabb feszültség pedig a max. fordulatszámra van jó hatással.
De legjobb lenne ha meglenne a nyomatékgörbe táblázata a motoroknak.
Max. motor feszültésg számítás a #4615-ös bejegyzésben, a 4A-es motorra kb. 55 volt-ot ad(a 2.8A-esre 80volt) tehát ez is közelebb van a 46V-os tápodhoz.
De legjobb lenne ha meglenne a nyomatékgörbe táblázata a motoroknak.
Max. motor feszültésg számítás a #4615-ös bejegyzésben, a 4A-es motorra kb. 55 volt-ot ad(a 2.8A-esre 80volt) tehát ez is közelebb van a 46V-os tápodhoz.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2015 május 01, 06:48
Írta: ANTAL GÁBOR Dátum 2015 május 01, 06:48
A kisebb melegedés megítélése csalóka. A disszpációs teljesítmény P = Inégyzet *R
a 4 A es motornál : 16*0,7 = 11.2 Watt
a 2,8A es motornál :7.84*1.5= 11.76 Watt
Gyakorlatilag megegyezik . Az áramnál a maximális áramot vettem figyelembe. De ugyanez az arány pl egy 50% os pihentetőáramnál is ( 2.8 W kontra 2.94W )
És egy mondat Xabinak : indukciója a mágnesnek ,elektromágnesnek van a mértékegysége Vs / m2 vagy másképp Tesla. ( illetve CGS ben Gauss ) A tekercsnek induktivitása van . Mértékegysége:
Henry (H ) az angolszászoknál Hy. Tehát :
6.8 mH illetve illetve 3 mH
a 4 A es motornál : 16*0,7 = 11.2 Watt
a 2,8A es motornál :7.84*1.5= 11.76 Watt
Gyakorlatilag megegyezik . Az áramnál a maximális áramot vettem figyelembe. De ugyanez az arány pl egy 50% os pihentetőáramnál is ( 2.8 W kontra 2.94W )
És egy mondat Xabinak : indukciója a mágnesnek ,elektromágnesnek van a mértékegysége Vs / m2 vagy másképp Tesla. ( illetve CGS ben Gauss ) A tekercsnek induktivitása van . Mértékegysége:
Henry (H ) az angolszászoknál Hy. Tehát :
6.8 mH illetve illetve 3 mH
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2015 május 01, 07:33
Írta: ANTAL GÁBOR Dátum 2015 május 01, 07:33
Az előzőkhöz : a léptető tekercsének a villamos helyettesítő kapcsolása egy sorosan kapcsolt induktivitás és egy ellenállás. A rendszer villamos időállandója : L/ R . Az egyik esetben : 6.8/1.5 = 4.5ms a másik esetben : 3/0.7 = 4.28ms . Itt sincs lényeges különbség. A döntésnél a vezérlő és a tápegység határadatait kell figyelembe venni. De ha azt is beleveszem hogy a vezérlő végfokjaiban fet ek vannak és a csatorna ellenállása egy kis feszültségű nagy áramú fetnek jelentősen kisebb (vagyis a fet sem melegszik annyira ) akkor az jön ki hogy nagyáramú vezérlőt könnyebb a gyárnak csinálni . Ezért én is a nagyáramú motorra szavaznék
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 május 01, 09:11
Írta: istvan58 Dátum 2015 május 01, 09:11
Tisztelt módi-k,
Az én hozaszólasom miért lett törölve??
Az én hozaszólasom miért lett törölve??
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 01, 09:38
Írta: 000000000 Dátum 2015 május 01, 09:38
Dolgozik a radírpók?
Azért egy válasz illene a kérdésedre!
Azért egy válasz illene a kérdésedre!
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 május 01, 10:05
Írta: istvan58 Dátum 2015 május 01, 10:05
Szerintem semmi olyat nem irtam ami ütközik a fórum szabályzatával. Kizárólag szakmai írás volt.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2015 május 01, 10:47
Írta: ANTAL GÁBOR Dátum 2015 május 01, 10:47
István ! Minthogy modi lettem akár nekem is szólhat a beírás . Remélem nem feltételezel ilyet rólam . Átnéztem 4670 től minden beírás meg van . Mikor írtad, mert az továbbra is fennáll hogy ha egyszerre nyomunk " mehet" et akkor az egyik beírás elvész. Tedd föl még egyszer mert a szakmát nem hiszem hogy valaki is moderálná
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 május 01, 10:56
Írta: istvan58 Dátum 2015 május 01, 10:56
Xabinak válaszoltam meg késő este.
De amikor irtam a gépem megakadt és kétszer íródott be, azután irtam hogy nem értem miért lett 2. Még éjfél tájt megvoltak. Tehát 3 beirás lett törölve. Bizom benne hogy csak a duplikációt akarta a kolléga törölni de mindhárom törlődöt. Talán jobban kell figyelni ha már valaki bizalmat kapot.
De amikor irtam a gépem megakadt és kétszer íródott be, azután irtam hogy nem értem miért lett 2. Még éjfél tájt megvoltak. Tehát 3 beirás lett törölve. Bizom benne hogy csak a duplikációt akarta a kolléga törölni de mindhárom törlődöt. Talán jobban kell figyelni ha már valaki bizalmat kapot.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 május 01, 10:58
Írta: istvan58 Dátum 2015 május 01, 10:58
Tehát a 4679 re válaszoltam éjfél előtt.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2015 május 01, 11:07
Írta: ANTAL GÁBOR Dátum 2015 május 01, 11:07
Akkor nem áll fönn hogy egyszerre nyomtunk . Amikor Xabi írt már régen aludtam . Az lehet amit feltételezel, hogy egy jószándékú kolléga hibát vétett. Ha van pár perced visrosszakhatnád mert kíváncsivá tettél ( magam is meglepődtem hogy milyen konklúzióra jutottam )
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 május 01, 11:34
Írta: istvan58 Dátum 2015 május 01, 11:34
Nagyjából ugyanazt mint Vernyul #4680 ban.
Cím: Re:Léptetőmotor
Írta: xabi Dátum 2015 május 01, 12:48
Írta: xabi Dátum 2015 május 01, 12:48
- Köszönöm a válaszokat. Akkor a nagyobb áramerősség kontra kisebb ellenállás, fázisfeszültség, és indukció kedvezőbb megoldás (ha a vezérlő, és a táp teljesítménye bírja).
- Az épített plazmavágó asztalomat szeretném átépíteni, fejleszteni. Jelenleg léptető motorok vannak rajta, ezeket a nagyobb sebesség és gyorsulás miatt akarom lecserélni. Láttam Hibrid enkóderes léptető motorokat, ha jól gondolom az enkóder miatt nem lehet lépésvesztés. Ilyen motort használ valaki ? Érdemes ilyet beszerezni ?
- Buta kérdés, de nem egészen értem az enkóder működését. Mondjuk ütközik a fej, a motor lépést veszt, az enkóder jelzi a vezérlőnek hogy nem tudott annyit lépni mint kellett volna. Ilyenkor hogyan kommunikál a vezérlő programmal (mach3, Uccnc) ? Leállítja a program futást, vagy megpróbálja behozni a lépésvesztést ?
- Az épített plazmavágó asztalomat szeretném átépíteni, fejleszteni. Jelenleg léptető motorok vannak rajta, ezeket a nagyobb sebesség és gyorsulás miatt akarom lecserélni. Láttam Hibrid enkóderes léptető motorokat, ha jól gondolom az enkóder miatt nem lehet lépésvesztés. Ilyen motort használ valaki ? Érdemes ilyet beszerezni ?
- Buta kérdés, de nem egészen értem az enkóder működését. Mondjuk ütközik a fej, a motor lépést veszt, az enkóder jelzi a vezérlőnek hogy nem tudott annyit lépni mint kellett volna. Ilyenkor hogyan kommunikál a vezérlő programmal (mach3, Uccnc) ? Leállítja a program futást, vagy megpróbálja behozni a lépésvesztést ?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2015 május 01, 20:10
Írta: svejk Dátum 2015 május 01, 20:10
Sajnos a szoftverek csak egy irányba kommunikálnak a motor vezérlőkkel, csak parancsot adnak ki.
A visszacsatolt léptetős motorvezérlőket nem ismerem, de a servo vezérlőkben be lehet állítani, hogy mekkora lemaradás esetén tiltsanak le.
A visszacsatolt léptetős motorvezérlőket nem ismerem, de a servo vezérlőkben be lehet állítani, hogy mekkora lemaradás esetén tiltsanak le.
Cím: Re:Léptetőmotor
Írta: wm94bppdn Dátum 2015 május 02, 01:24
Írta: wm94bppdn Dátum 2015 május 02, 01:24
Egyik fórumtársunk kérésével kapcsolatban visszafejtettem egy kínai vezérlő egy részét, a bemeneteit. Amit találtam, az korrekt tervezésre utal, kivéve az optocsatolókat. Eltekintve attól, hogy 3 darabnak a bemeneti lába el van csípve, és drótdarabbal át van kötve a bemenet a kimenetre, az egész optocsatoló ügyet nem értem. Minek vannak, ha a bemenet és a kimenet földje és tápja közös? Így semmiféle galvanikus leválasztás nem valósul meg, akkor meg minek? Ráadásul jó lassú darabok. Nem hiszem, hogy a teljesítmény ic (TB6560) felől, tönkremenés esetén netán visszajövő feszültségtől gondolták megóvni a PC-t, mert ott bufferek-inverterek vannak, azok feláldozzák magukat. A többi kínai vezérlő is hasonló ebben a tekintetben?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 02, 05:59
Írta: 000000000 Dátum 2015 május 02, 05:59
A jelenlegi felállásban a párhuzamos port nem nagyon alkalmas a kétirányú kommunikációra.
Van ugyan négy bemenet (korlátozottan), de azokat használják a végálláskapcsolók.
Van ugyan négy bemenet (korlátozottan), de azokat használják a végálláskapcsolók.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 02, 09:08
Írta: 000000000 Dátum 2015 május 02, 09:08
Leadshine AM882 vezérlő tud visszajelzést küldeni a lépésvesztésről.
Ha ellép akkor nyom egy E stopot aztán ennyi, már ha be van kötve a stopkörbe :)
A normális encoder visszacsatolású "léptetőmotor" vezérlő meg nagy ívben tesz jó magasról a motor lépéseire. (felbontás a enkóder felbontása lesz )
Ezeknél már szervó rendszerről beszélhetünk mert a léptetőmotor mint végrehajtó egységként van jelen a rendszerben.
Tehát mint egy brushless motoros szervó lenne és erőszakkal kitérítve vissza fog ugrani az eredeti pozíciójába.
Egy kis demo Videó Link ITT!
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2015 május 02, 09:32
Írta: svejk Dátum 2015 május 02, 09:32
Ezek a közismert szoftverek szerintem anno mind mezei léptetős rendszerben gondolkoztak, oda elég volt az LPT, könnyű programozni.
Gondolom fontos dolog lehetett a tervezésben, hogy minél kevesebb hardvert kelljen használni.
(van olyan szoft. is ami 4 tranyó segítségével közvetlen a motorok tekercseit kapcsolgatja)
De szerintem maximum L297-ben gondolkodtak.
Aztán Kína elkezdte ontani az egyre bonyolultabb de olcsó microsteppes vezérlőket, az amcsik megalkották a filléres Gecko servot.
A szoftverek fejlesztői meg nem igazán tudtak, vagy kompatibilitás miatt nem akartak váltani a visszacsatolt mozgásvezérlésre.
Az 5. bemenet még jobban korlátozott, hogy nem is említetted?
Gondolom fontos dolog lehetett a tervezésben, hogy minél kevesebb hardvert kelljen használni.
(van olyan szoft. is ami 4 tranyó segítségével közvetlen a motorok tekercseit kapcsolgatja)
De szerintem maximum L297-ben gondolkodtak.
Aztán Kína elkezdte ontani az egyre bonyolultabb de olcsó microsteppes vezérlőket, az amcsik megalkották a filléres Gecko servot.
A szoftverek fejlesztői meg nem igazán tudtak, vagy kompatibilitás miatt nem akartak váltani a visszacsatolt mozgásvezérlésre.
Az 5. bemenet még jobban korlátozott, hogy nem is említetted?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2015 május 02, 09:40
Írta: svejk Dátum 2015 május 02, 09:40
Ez egy ügy, de ettől még a szoftver nincs bevonva a visszacsatolt mozgásvezérlésbe mint az iparban.
Amíg ezt valamelyik hobby szoftver nem oldja meg, addig egy jó nagy lépéssel fogunk az ipar után kullogni és kompromisszumokat kell elfogadnunk.
Bár lehet Tibor45 rendszere már ki van építve, de arról meg nem sokat tudunk.
Sajnos akik használják azoktól sem kapunk visszajelzést, pedig vannak itt páran.
Igaz régebben sem voltak nagy fórumozók.
Amíg ezt valamelyik hobby szoftver nem oldja meg, addig egy jó nagy lépéssel fogunk az ipar után kullogni és kompromisszumokat kell elfogadnunk.
Bár lehet Tibor45 rendszere már ki van építve, de arról meg nem sokat tudunk.
Sajnos akik használják azoktól sem kapunk visszajelzést, pedig vannak itt páran.
Igaz régebben sem voltak nagy fórumozók.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 02, 09:52
Írta: 000000000 Dátum 2015 május 02, 09:52
Jó vezérlőnél nem is kell visszacsatolás maximum a E stopon keresztül.
Több lenne a nyűje mint a haszna, ha hiba van lője ki a programot és kész.
Míg a vezérlő gondolkodás nélkül végrehajtja a program dolgait addig a lőtéri kutyát se érdekli ez program vezérlő hurok alkotás.
Csak nézz meg egy régebbi Fanuc rendszert !
Az országban egy kezemen meg tudom számolni akik VALÓJÁBAN értenek hozzá.
Akkor majd a egyszerű hobbis akinek az is problémát okoz, hogy az AM vezérlőt beiktassa a stopkörbe pont egy ilyen agyonbonyolított valamit akar majd ?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 02, 10:02
Írta: 000000000 Dátum 2015 május 02, 10:02
Az ötödiket tényleg nem említettem.
Kezdésnek jó volt ahogy csinálták. Tényleg ragaszkodtak a kompatibilitáshoz. Mint ahogy a Mach is.
Említetted a kezdetleges IC-ket. A Mach is erre épült. Közben elterjedtek az "okos" (most ez a kifejezés nagyon divatos) cél integrált áramkörök. Így aztán a rámpa kérdés aktuális lenne. [#nevetes1][#nevetes1][#nevetes1][#nevetes1][#nevetes1]
No de ez egy későbbi történet. [#nevetes1]
A múltkorában említettem, hogy szerintem is jó a párhuzamos port, de tovább kell lépni.
Éppen ezért vetődött fel bennem a saját I/O kártya problémája.
Nekem így kicsit nagy falat, de boldogulok vele. Csak, lassan.
Kezdésnek jó volt ahogy csinálták. Tényleg ragaszkodtak a kompatibilitáshoz. Mint ahogy a Mach is.
Említetted a kezdetleges IC-ket. A Mach is erre épült. Közben elterjedtek az "okos" (most ez a kifejezés nagyon divatos) cél integrált áramkörök. Így aztán a rámpa kérdés aktuális lenne. [#nevetes1][#nevetes1][#nevetes1][#nevetes1][#nevetes1]
No de ez egy későbbi történet. [#nevetes1]
A múltkorában említettem, hogy szerintem is jó a párhuzamos port, de tovább kell lépni.
Éppen ezért vetődött fel bennem a saját I/O kártya problémája.
Nekem így kicsit nagy falat, de boldogulok vele. Csak, lassan.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 02, 10:09
Írta: 000000000 Dátum 2015 május 02, 10:09
Mellesleg nem biztos az hogy sokkal el vagyunk maradva, mert nézd meg a Mach4-et.
Az már tud modbus vezérlést is és annál meg kétirányú kommunikációt alap feltétel.
Így az eddig úgymond használhatatlan vezérlők is lehet hogy egyszeriben használhatók lesznek.
Tehát nem kell fejlesztgetni mikor már rég van kész megoldás :D
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2015 május 02, 11:47
Írta: s7manbs8 Dátum 2015 május 02, 11:47
Az IO kártyát melyik buszra féle buszra tervezed ?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 02, 12:09
Írta: 000000000 Dátum 2015 május 02, 12:09
VESA, ha jól írom.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 02, 12:10
Írta: 000000000 Dátum 2015 május 02, 12:10
Nem jó!
ISA.
Ezekkel az idióta inglis dolgokkal bajban vagyok.
Na majd utána nézek a nevének.
ISA.
Ezekkel az idióta inglis dolgokkal bajban vagyok.
Na majd utána nézek a nevének.
Cím: Re:Léptetőmotor
Írta: xabi Dátum 2015 május 02, 12:14
Írta: xabi Dátum 2015 május 02, 12:14
Ilyesmit szeretnék venni : Enkoderes léptető motor + vezérlés
Ha jól értem hobbi szintű vezérlők, enkóderes motorok és programok (mach3,Uccnc), független attól hogy DC,AC szervó vagy enkóderes léptető motor úgy működnek, hogy a vezérlő megkapja a jeleket amit le kell lépni az enkóderen keresztül a vezérlés figyeli hogy le lett-e lépve ha lépésvesztés van kiad egy jelet mondjuk az E-stopra és megállítja a program futását ? Ennyi ?
A tévesztés függvényében a valós lelépett és a lelépni kívánt út különbséget sehogyan nem lehet korrigálni ? Ilyenkor hogyan lehet a programot tovább futtatni ?
Ha jól értem hobbi szintű vezérlők, enkóderes motorok és programok (mach3,Uccnc), független attól hogy DC,AC szervó vagy enkóderes léptető motor úgy működnek, hogy a vezérlő megkapja a jeleket amit le kell lépni az enkóderen keresztül a vezérlés figyeli hogy le lett-e lépve ha lépésvesztés van kiad egy jelet mondjuk az E-stopra és megállítja a program futását ? Ennyi ?
A tévesztés függvényében a valós lelépett és a lelépni kívánt út különbséget sehogyan nem lehet korrigálni ? Ilyenkor hogyan lehet a programot tovább futtatni ?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 02, 12:15
Írta: 000000000 Dátum 2015 május 02, 12:15
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2015 május 02, 12:29
Írta: ANTAL GÁBOR Dátum 2015 május 02, 12:29
Nézz utána a doksiban . A Klavió is árul hasonlót . Csak tipp : láttam valahol egy videót . Ha állt mondjuk a motor és megcsavarták a tengelyt akkor igyekezett visszatérni az induló helyzetbe. . Pont úgy viselkedett mint egy DC vagy AC szervó ( csak alapból nagyobb a nyomaték és kisebb a határ fordulatszám )
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2015 május 02, 12:44
Írta: s7manbs8 Dátum 2015 május 02, 12:44
Az aránylag könnyen kivitelezhető és nem is drága, csak ahhoz kell olyan alaplap is akkor.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 02, 12:47
Írta: 000000000 Dátum 2015 május 02, 12:47
Azért választottam ezt. A PCI -ost le s tudnám rajzolni. Van ilyen alaplapom vagy tíz.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2015 május 02, 12:51
Írta: s7manbs8 Dátum 2015 május 02, 12:51
Padláson nálam is van pár alaplap még ilyen, egy életre elég CNC-zni.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2015 május 02, 13:20
Írta: svejk Dátum 2015 május 02, 13:20
Hát, manapság ISA-ra fejleszteni, szerintem nem túl jó ötlet.
Kedvtelésnek viszont biztosan jó.
Kedvtelésnek viszont biztosan jó.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 02, 13:22
Írta: 000000000 Dátum 2015 május 02, 13:22
Engem a divat semmiben nem érdekelt soha.
Csak kedvtelés számomra ez az egész cnc, meg ami még hozzá kapcsolható.
Csak kedvtelés számomra ez az egész cnc, meg ami még hozzá kapcsolható.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2015 május 02, 13:25
Írta: svejk Dátum 2015 május 02, 13:25
Ezt szerintem nagyon nem jól látod. Pont a szoftverbe való visszacsatolás hiánya miatt ez a sok korlát a hobby-ban.
A hobbysták mindent meg tudnak tanulni, ha akarnak, no és persze van mit.
10 éve amikor megépítettem a bútorlapos gépemet én sem gondoltam sok mindent ami azóta megtörtént.
A hobbysták mindent meg tudnak tanulni, ha akarnak, no és persze van mit.
10 éve amikor megépítettem a bútorlapos gépemet én sem gondoltam sok mindent ami azóta megtörtént.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2015 május 02, 13:41
Írta: s7manbs8 Dátum 2015 május 02, 13:41
Meg DOS alá, meg LPT-re se, az is inkább csak hobbizgatás, de azért csak csinálgatja az ember, mint én is a DOS alatt futó cnc vezérlőprogramomat. :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 02, 13:53
Írta: 000000000 Dátum 2015 május 02, 13:53
Szerintem ennek az enkóderes léptetős rendszernek semmi értelme a szokásos felhasználásban.
Amit lentebb írsz, hogy gyorsítani szeretnéd a plazmádat, arra biztosan nem ez a megoldás.
Ha, gyorsítani akarod, akkor erősebb léptetőmotos, gyorsító áttétellel. Vagy szervó rendszer.
A léptetőmotoros rendszert nem úgy kell elképzelni, hogy az állandóan azon töri a fejét, hogyan tudna lépésvesztést okozni.
Ez, egyáltalán nem így van. Ez a hajtás is kb. olyan, mint a többi. Ha, jól van méretezve. Összerakva akkor jól működik. Ha, nem akkor hibázik.
Pont annyira fog hibázni, mint a gép tervezője, építője.
Ha, megakad, akkor megakad az enkóderes is. Ezen nem segít 5 enkóder sem.
Hiába próbálkozik, bepótolni a lépésvesztést.
Szerintem, csak speciális esetben van, lehet némi értelme az enkóderes léptetőnek.
Egyébként fölöslegesen bonyolítja a rendszert. Ennek megfelelően, fölösleges pénzkidobás.
Használok, szervós rendszert is, és léptetőset is. Mindkettő tökéletesen teszi a dolgát.
Komolynak mondható fémipari CNC gépem is léptetőmotoros rendszerrel dolgozik.
Hibázás nélkül, pontosan dolgozik évek óta.
Én is elgondolkodtam az enkóderes használatán. De, mindig arra jutottam, hogy számomra semmi előnye nem lenne.
Persze, nem tudom miért esett az enkóderesre a választásod.
Azért, csak gondold át logikusan.
Nem akarlak lebeszélni róla. Legalább, beszámolsz a tapasztalataidról.
Persze, még érdekesebb lenne, ha te tudnád összehasonlítani enkóder nélkülivel.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 02, 14:35
Írta: 000000000 Dátum 2015 május 02, 14:35
Felesleges az enkóder a léptetőre? [#nevetes1][#nevetes1][#nevetes1][#nevetes1][#nevetes1]
Egy fagépre biztosan.
Egy fagépre biztosan.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 02, 14:41
Írta: 000000000 Dátum 2015 május 02, 14:41
Ha bele akarunk karcolászni egy deszkába, hogy szeretlek julis, ahhoz tényleg nem kell enkóder.
Ha mást is akarunk csinálni vele, akkor néha elengedhetetlen.
Ha mást is akarunk csinálni vele, akkor néha elengedhetetlen.
Cím: Re:Léptetőmotor
Írta: 9pk59nuy Dátum 2015 május 02, 19:33
Írta: 9pk59nuy Dátum 2015 május 02, 19:33
"Ha mást is akarunk csinálni vele, akkor néha elengedhetetlen."
Mire gondoltál?
Mire gondoltál?
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2015 május 02, 19:41
Írta: Szalai György Dátum 2015 május 02, 19:41
Szerintem.
Amit írtál, annak ellentmondani látszik az a körülmény, hogy a léptetőmotor lépésének sebessége nagyrészben a tekercsén áthajtott áram mennyiségétől függ.
Semmi akadálya annak, hogy akár a névleges áram többszörösét lehessen áthajtani a motor tekercsén, addig, míg a hő profil megengedi. (Míg túl nem melegszik.)
Ez pedig lehetőséget mutat arra, hogy amikor a névleges áramon már nem tud lépni a rendelkezésére álló idő alatt (és ezt az encoderen keresztül érzékeli a motorvezérlő) akkor a névleges áram többszörösével utolérje magát, majd visszaálljon a névleges áramú, esetleg a pihentető állapotra.
Az encoderes megoldás (és némi intelligencia) átsegíti a motort a nehéz helyzeteken.
Az alulméretezésen természetesen ez sem segít, viszont sokkal jobb a motor kihasználtsága.
Szerintem.
Amit írtál, annak ellentmondani látszik az a körülmény, hogy a léptetőmotor lépésének sebessége nagyrészben a tekercsén áthajtott áram mennyiségétől függ.
Semmi akadálya annak, hogy akár a névleges áram többszörösét lehessen áthajtani a motor tekercsén, addig, míg a hő profil megengedi. (Míg túl nem melegszik.)
Ez pedig lehetőséget mutat arra, hogy amikor a névleges áramon már nem tud lépni a rendelkezésére álló idő alatt (és ezt az encoderen keresztül érzékeli a motorvezérlő) akkor a névleges áram többszörösével utolérje magát, majd visszaálljon a névleges áramú, esetleg a pihentető állapotra.
Az encoderes megoldás (és némi intelligencia) átsegíti a motort a nehéz helyzeteken.
Az alulméretezésen természetesen ez sem segít, viszont sokkal jobb a motor kihasználtsága.
Szerintem.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2015 május 02, 19:42
Írta: s7manbs8 Dátum 2015 május 02, 19:42
A léptetőmotoroknál mennyi vajon a megengedhető túláram, ahol még a vasmag nem telítődik ?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2015 május 02, 20:01
Írta: svejk Dátum 2015 május 02, 20:01
Ahogy Elektron is jól sejti, telítődik a vasmag.
A "hőprofil" ugyan elbírná, de túlgerjesztett motor járása "darabossá" válik és lecsökken a max. sebesség.
Mondjuk 0-hoz közeli sebességen működhet.
A "hőprofil" ugyan elbírná, de túlgerjesztett motor járása "darabossá" válik és lecsökken a max. sebesség.
Mondjuk 0-hoz közeli sebességen működhet.
Cím: Re:Léptetőmotor
Írta: xabi Dátum 2015 május 02, 20:59
Írta: xabi Dátum 2015 május 02, 20:59
Nem akarom mindenáron lecserélni a jelenlegi léptető motort, csak meg szeretném érteni a működését az enkóderes léptető motornak illetve a szervó motoroknak. Ez alapján tudnék dönteni.
Nekem egy plazma asztalom van, nagyobb vágás esetén néha fél óráig is ott felejtem, teszi a dolgát. Bizonyos esetekben pl. ha befordul valamilyen munkadarab és neki megy a fej akkor lépést veszthet a program. Arra gondolok hogy ilyen esetben az enkóder jelzi a vezérlőnek hogy nem tudta lelépni a feladatot és állítsa meg a programot. Azt is gondoltam mivel az enkóder tudja mennyit léptünk le (függetlenül attól hogy mennyit kellett volna), a referencia pontot így nem veszítjük el csak valahogy át kéne adni a programnak, és pár sor visszalépés után lehet folytatni. Szerintem álom világban élek mert a hozzászólások alapján ez nem így működik. :)
A szervóhajtás hogyan működik ? Mi történik ha akadály van ? (mondjuk marásánál túl nagy az ellenállás, ilyenkor a vezérlés a kisebb lépésvesztést próbálja mondjuk nagyobb áramerősséggel korrigálni ? és ha nem sikerül mondjuk x értéknél nagyobb a lépés lemaradás akkor leállítja a program futását ?
Nekem egy plazma asztalom van, nagyobb vágás esetén néha fél óráig is ott felejtem, teszi a dolgát. Bizonyos esetekben pl. ha befordul valamilyen munkadarab és neki megy a fej akkor lépést veszthet a program. Arra gondolok hogy ilyen esetben az enkóder jelzi a vezérlőnek hogy nem tudta lelépni a feladatot és állítsa meg a programot. Azt is gondoltam mivel az enkóder tudja mennyit léptünk le (függetlenül attól hogy mennyit kellett volna), a referencia pontot így nem veszítjük el csak valahogy át kéne adni a programnak, és pár sor visszalépés után lehet folytatni. Szerintem álom világban élek mert a hozzászólások alapján ez nem így működik. :)
A szervóhajtás hogyan működik ? Mi történik ha akadály van ? (mondjuk marásánál túl nagy az ellenállás, ilyenkor a vezérlés a kisebb lépésvesztést próbálja mondjuk nagyobb áramerősséggel korrigálni ? és ha nem sikerül mondjuk x értéknél nagyobb a lépés lemaradás akkor leállítja a program futását ?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2015 május 02, 21:04
Írta: s7manbs8 Dátum 2015 május 02, 21:04
Encoderes léptetőnél, csak jelez, hogy baj van, persze lehet, hogy van olyan szoftver, ami tud ezután korrigálni, folytatni is, szervónál, szintén kiakad úgymond, ha nem bírja követni a kiadott pozíciót, de annál, ha kicsit erőlködni kell, az még megy a szervónál, amennyit a vezérlője megenged, csak utána áll le hibával.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 május 02, 22:23
Írta: istvan58 Dátum 2015 május 02, 22:23
Sziasztok,
Az enkóderes léptető motor ugy működik ahogy Szalai György irja.
A motor a névleges áramnál kisebb áramal megy, igy sokkal kevésbé melegszik, majd ahogy terhelődik az enkóder jelzi a lemaradást és a vezerlő növeli az aramot akár a névleges többszörösére is.
Mig egy normál léptető rendszernél a nyomaték 50-60% ával számolhatunk addig az enkódereseröl azt írják hogy 100% al.
Nekem is sima léptetős gépem van, lépest csak akkor vesztet ha nekimentem valaminek a szerszámal. De ilyenkor mar ugy is mindegy [#smile]
Az enkóderes léptető motor ugy működik ahogy Szalai György irja.
A motor a névleges áramnál kisebb áramal megy, igy sokkal kevésbé melegszik, majd ahogy terhelődik az enkóder jelzi a lemaradást és a vezerlő növeli az aramot akár a névleges többszörösére is.
Mig egy normál léptető rendszernél a nyomaték 50-60% ával számolhatunk addig az enkódereseröl azt írják hogy 100% al.
Nekem is sima léptetős gépem van, lépest csak akkor vesztet ha nekimentem valaminek a szerszámal. De ilyenkor mar ugy is mindegy [#smile]
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 május 02, 22:26
Írta: istvan58 Dátum 2015 május 02, 22:26
http://www.leadshine.com/category.aspx?type=products&category=easy-servo-products
Cím: Re:Léptetőmotor
Írta: KoLa Dátum 2015 május 02, 22:27
Írta: KoLa Dátum 2015 május 02, 22:27
A plazmavágó fejet mágnessel kell rögzíteni!
Ez megvédi a fejet a töréstől beakadáskor, és nem lesz lépésvesztés sem!
Ez megvédi a fejet a töréstől beakadáskor, és nem lesz lépésvesztés sem!
Cím: Re:Léptetőmotor
Írta: vjanos Dátum 2015 május 02, 22:35
Írta: vjanos Dátum 2015 május 02, 22:35
Ez jó ötlet. Ha már ott a mágnes, akkor egy hall vagy reed kapcsoló érzékelheti is a fej leesését, és indíthatja az e-stopot.
Cím: Re:Léptetőmotor
Írta: KoLa Dátum 2015 május 02, 22:40
Írta: KoLa Dátum 2015 május 02, 22:40
Nem estop-ot kell aktiválni! hanem a pause-t!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 03, 06:03
Írta: 000000000 Dátum 2015 május 03, 06:03
Elsős sorban olyasmire gondoltam, amit Szalai sporttárs is felvázolt.
Nem biztos, hogy mindenki századonként, tizedenként akar elkoptatni átmérőben 20 - 40 millimétert.
Esztergában gondolkodva és persze egyedi munkára a "kézi" használat lehetősége egy hobbistának sokszor jól jönne. Én elsősorban hobbi célra használt gépre gondolok. Ritka az, aki valamiből pl. 50 ezer darabot akar valamiből otthon. [#nevetes1]
A fent említettek csak ízelítő a lehetőségek közül.
Nem biztos, hogy mindenki századonként, tizedenként akar elkoptatni átmérőben 20 - 40 millimétert.
Esztergában gondolkodva és persze egyedi munkára a "kézi" használat lehetősége egy hobbistának sokszor jól jönne. Én elsősorban hobbi célra használt gépre gondolok. Ritka az, aki valamiből pl. 50 ezer darabot akar valamiből otthon. [#nevetes1]
A fent említettek csak ízelítő a lehetőségek közül.
Cím: Re:Léptetőmotor
Írta: 9pk59nuy Dátum 2015 május 03, 10:31
Írta: 9pk59nuy Dátum 2015 május 03, 10:31
Egyetértek Danibá60-al!
Az én tapasztalatom is az, hogy amíg a léptető megy, addig pontos. Ha megáll akkor viszont mindegy, mert újra kell gondolni a paraméterezést.
Példa léptető alkalmazására:
AT520-as eszterga-marógépet alakítottam át CNC-re. A gép robusztus öntvényekből áll, prizmás vezetékekkel. A főorsómotor 600W teljesítményű. A mellékmozgások golyósorsóval, 6,5Nm nyomatékú, párhuzamosan kötött tekercsű motorokkal lettek kivitelezve. A vezérlő MSD 50-4,2 stabilizálatlan 48V tápfeszültséggel.
Ez a konfiguráció nekem sohasem téveszt, akár egész nap dolgozhatok vele a méret megtartása mellett! A léptetőmotorok árama úgy lett beállítva, hogy kézzel nem lehet melegnek érezni néhány óra munka után sem. A G0 sebessége pedig több mint elég, még vissza is vettem belőle.
Így én sem gondolom, hogy a léptetőmotorok nem megbízhatóak és ezért enkóderrel kellene kiegészíteni azokat. Viszont tagadhatatlan előnye az enkóderes rendszernek, hogy hiba esetén (pl.: ütközés) képes automatikusan leállítani a gépet.
Az én tapasztalatom is az, hogy amíg a léptető megy, addig pontos. Ha megáll akkor viszont mindegy, mert újra kell gondolni a paraméterezést.
Példa léptető alkalmazására:
AT520-as eszterga-marógépet alakítottam át CNC-re. A gép robusztus öntvényekből áll, prizmás vezetékekkel. A főorsómotor 600W teljesítményű. A mellékmozgások golyósorsóval, 6,5Nm nyomatékú, párhuzamosan kötött tekercsű motorokkal lettek kivitelezve. A vezérlő MSD 50-4,2 stabilizálatlan 48V tápfeszültséggel.
Ez a konfiguráció nekem sohasem téveszt, akár egész nap dolgozhatok vele a méret megtartása mellett! A léptetőmotorok árama úgy lett beállítva, hogy kézzel nem lehet melegnek érezni néhány óra munka után sem. A G0 sebessége pedig több mint elég, még vissza is vettem belőle.
Így én sem gondolom, hogy a léptetőmotorok nem megbízhatóak és ezért enkóderrel kellene kiegészíteni azokat. Viszont tagadhatatlan előnye az enkóderes rendszernek, hogy hiba esetén (pl.: ütközés) képes automatikusan leállítani a gépet.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 03, 16:03
Írta: 000000000 Dátum 2015 május 03, 16:03
Megpróbáltam elképzelni, amikor K1 -s anyagban 5 milis fogásmélységgel és másfél milkó fordulatonkénti előtolással hasítasz.
Nem sikerült elképzelnem. [#nevetes1]
Tudom, fantáziátlan vagyok.
Nem sikerült elképzelnem. [#nevetes1]
Tudom, fantáziátlan vagyok.
Cím: Re:Léptetőmotor
Írta: 9pk59nuy Dátum 2015 május 03, 18:44
Írta: 9pk59nuy Dátum 2015 május 03, 18:44
Elkerülte a figyelmedet, hogy 600W a főorsóm teljesítménye!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 03, 20:38
Írta: 000000000 Dátum 2015 május 03, 20:38
Ha elkerülte volna, akkor el is tudtam volna képzelni a jelenséget. [#nevetes1]
Pusztán arra céloztam, hogy talán nem tudod átlátni kellő mélységben a problémát. Ezért elegendő számodra az adott technikai feltétel.
Olyan is lehet, hogy tévedtem.
Pusztán arra céloztam, hogy talán nem tudod átlátni kellő mélységben a problémát. Ezért elegendő számodra az adott technikai feltétel.
Olyan is lehet, hogy tévedtem.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 03, 21:03
Írta: 000000000 Dátum 2015 május 03, 21:03
Abbahagyni az értelmetlen szócsatát!!!
az Egyik Modi
az Egyik Modi
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 03, 21:10
Írta: 000000000 Dátum 2015 május 03, 21:10
Abbahagyni az értelmetlen szócsatát!!!
az Egyik Modi
az Egyik Modi
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 03, 21:13
Írta: 000000000 Dátum 2015 május 03, 21:13
kezdődik!?
(nem már vége van!
az Egyik Modi)
(nem már vége van!
az Egyik Modi)
Cím: Re:Léptetőmotor
Írta: xit3medzv Dátum 2015 május 03, 22:05
Írta: xit3medzv Dátum 2015 május 03, 22:05
Azért az más, ha valós időben lehet vezérelni egy motort, új dinamikai távlatok nyílnak, pl. nagy tömeg mozgatásakor egy PID szabályozó sokkal hatékonyabb. Ilyen jellegű felhasználásnál, amik itt előfordulnak nem sok a jelentősége, de pl. egy régi gép cnc-sítésnél nagyon jól jön sztem.
Cím: Re:Léptetőmotor
Írta: cxmcdtrx Dátum 2015 május 05, 00:06
Írta: cxmcdtrx Dátum 2015 május 05, 00:06
Megint egy szakmainak tűnő, hobbi kategóriában még felmerülő, számomra fontos kérdés:
4 darab DM860A típusú léptetőmotor vezérlőhöz milyen tápegységet tegyek?
Kapcsolóüzemű, stabilizált Siemens, 48V / 20 Amper, vagy inkább toroid trafó egyenirányítva, pufferelve, stabilizálás nélkül (1250 VA, 48V)?
A vezérlők ugyebár áramgenerátoros üzemben mennek. Melyik a célszerűbb? Hogy mennyibe kerülne lényegtelen, mert itt van mindkettő megoldás kompletten a polcon, mindegy melyiket veszem le, csak jó legyen.
Előre is köszönöm a segítő szándékú válaszokat!
4 darab DM860A típusú léptetőmotor vezérlőhöz milyen tápegységet tegyek?
Kapcsolóüzemű, stabilizált Siemens, 48V / 20 Amper, vagy inkább toroid trafó egyenirányítva, pufferelve, stabilizálás nélkül (1250 VA, 48V)?
A vezérlők ugyebár áramgenerátoros üzemben mennek. Melyik a célszerűbb? Hogy mennyibe kerülne lényegtelen, mert itt van mindkettő megoldás kompletten a polcon, mindegy melyiket veszem le, csak jó legyen.
Előre is köszönöm a segítő szándékú válaszokat!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 05, 00:36
Írta: 000000000 Dátum 2015 május 05, 00:36
A kapcsolóüzemű stabilabban tartja a kimeneti feszültséget.
A toroidos megfelelően pufferelve az áramokkal bír jobban, viszont a feszültsége kis mértékben változhat a terhelés pillanatnyi mértékének megfelelően.
Viszont egy ekkora toroidnál nem biztos, hogy ez észrevehető lenne.
A kapcsolóüzemű kisebb helyen elfér.
A toroidos megfelelően pufferelve az áramokkal bír jobban, viszont a feszültsége kis mértékben változhat a terhelés pillanatnyi mértékének megfelelően.
Viszont egy ekkora toroidnál nem biztos, hogy ez észrevehető lenne.
A kapcsolóüzemű kisebb helyen elfér.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 05, 00:42
Írta: 000000000 Dátum 2015 május 05, 00:42
Én a trafós megoldást részesítem előnyben. Kevés alkatrész kevés hibalehetőség.
Egy trafós táp tud rugalmasan működni. Ami jól jöhet bizonyos esetekben.
A trafós tápot elég a várható összes áramszükséglet kétharmadára, háromnegyedére tervezni.
A kapcsolóüzemű tápot ajánlott legalább 100 százalékra tervezni. Mivel teljesen rugalmatlan.
Meg is viccelt már pár hobbystát. Nem találják, mi lehet a gond.
A stabilizálásra semmi szükség. Sőt, akár hátrányos is lehet alkalmanként.
A kapcsoló üzemű tápból kijöhetnek zavaró jelek is. Ami lépésvesztést okozhat.
Én már találkoztam ilyennel.
Persze, az is igaz. Több olyanról is tudok, ahol nem okoz lépésvesztést.
De, a megfelelő teljesítményű trafó soha nem okoz hibát.
A döntés a tiéd.
Cím: Re:Léptetőmotor
Írta: cxmcdtrx Dátum 2015 május 05, 00:51
Írta: cxmcdtrx Dátum 2015 május 05, 00:51
Oké :-)
Köszönöm a válaszokat mindkettőtöknek!
Ezek lesznek a motorok és alattuk láthatók a vezérlők.
4 db 3.1 Nm-es motor, ezt kell tudnom böcsülettel meghajtani.
Szerintem a 20 amperes kapcsolóüzemű éppúgy nem néz vissza neki, mint a 48V/10A toroid + 10-20 000 uF puffer...
De akkor melyiket is? [#nemtudom]
Köszönöm a válaszokat mindkettőtöknek!
Ezek lesznek a motorok és alattuk láthatók a vezérlők.
4 db 3.1 Nm-es motor, ezt kell tudnom böcsülettel meghajtani.
Szerintem a 20 amperes kapcsolóüzemű éppúgy nem néz vissza neki, mint a 48V/10A toroid + 10-20 000 uF puffer...
De akkor melyiket is? [#nemtudom]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 05, 01:09
Írta: 000000000 Dátum 2015 május 05, 01:09
A 4 motornak kicsit szűkös a 10 Amper. Legalább 12 -13 kellene.
Igaz, nem olvastam bele, hogyan is használnád a 4 motort.
Igy, már eldőlni látszik, hogy a kapcsi tápot kell használnod. Az, bőven sok.
Cím: Re:Léptetőmotor
Írta: cxmcdtrx Dátum 2015 május 05, 01:12
Írta: cxmcdtrx Dátum 2015 május 05, 01:12
2+2 tengely összeállításban fog közlekedni, tehát a két oldal nagyon sokszor fog szinkronban menni.
(Pl 45 fokos elmozdulásnál a 4 motor gyakorlatilag egyszerre kap STEP és DIR jeleket is.)
(Pl 45 fokos elmozdulásnál a 4 motor gyakorlatilag egyszerre kap STEP és DIR jeleket is.)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 05, 01:12
Írta: 000000000 Dátum 2015 május 05, 01:12
Az, az, bőven elég.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 05, 01:14
Írta: 000000000 Dátum 2015 május 05, 01:14
Akkor, egyértelmű a kapcsi.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 május 13, 14:00
Írta: 000000000 Dátum 2015 május 13, 14:00
Hello!
Elakadtam, van egy kezdetleges gépem, és egy olyan problémám, hogy az egyik tengelyemen egy bipoláris (4 vezetékes) léptetőmotor van,és amikor mozgatom pulzálva mozog, azaz lép néhányat, majd megáll(?) kicsit aztán így tovább, de nem kimondottan rángat. 16-od lépésben vezérlem, van egy kínai vezérlőm és mach3 programot használok. Ha valaki tudna valami javaslatot, kérem ne tartsa magába, nem találok megfelelő megoldást az interneten. Köszi!
Elakadtam, van egy kezdetleges gépem, és egy olyan problémám, hogy az egyik tengelyemen egy bipoláris (4 vezetékes) léptetőmotor van,és amikor mozgatom pulzálva mozog, azaz lép néhányat, majd megáll(?) kicsit aztán így tovább, de nem kimondottan rángat. 16-od lépésben vezérlem, van egy kínai vezérlőm és mach3 programot használok. Ha valaki tudna valami javaslatot, kérem ne tartsa magába, nem találok megfelelő megoldást az interneten. Köszi!
Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2015 június 12, 12:57
Írta: Gyárfás Attila Dátum 2015 június 12, 12:57
Üdv
Tudna valaki esetleg ötletet,tanácsot adni?
Egy projekthez kellene egy olyan motor+vezérlés, ami pontosan 12óra alatt fordul körbe, de lehetőleg nagyon pontosan. Folyamatos forgás gondolom áttételes lehetne, vagy max. a percenkénti léptetés lenne jó. (Ami percenként lépne egyet, vagyis 60*12=720 lépés.)
Minél egyszerűbb (max.12V-os )megoldás kellene, léptető vagy DC motoros.
Előre is köszi
Tudna valaki esetleg ötletet,tanácsot adni?
Egy projekthez kellene egy olyan motor+vezérlés, ami pontosan 12óra alatt fordul körbe, de lehetőleg nagyon pontosan. Folyamatos forgás gondolom áttételes lehetne, vagy max. a percenkénti léptetés lenne jó. (Ami percenként lépne egyet, vagyis 60*12=720 lépés.)
Minél egyszerűbb (max.12V-os )megoldás kellene, léptető vagy DC motoros.
Előre is köszi
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2015 június 12, 13:08
Írta: Rabb Ferenc Dátum 2015 június 12, 13:08
A rádió vezérlésű órák nagy mutatója pontosan ezt teszi. 12 óra alatt egy fordulat. És atomóra pontossággal.
A léptető motor vezérlő jele elektromosan "méretre szabva" vagy a tényleges mozgás mechanikusan tovább felhasználva szerintem teljesítheti az elvárt feladatot
A léptető motor vezérlő jele elektromosan "méretre szabva" vagy a tényleges mozgás mechanikusan tovább felhasználva szerintem teljesítheti az elvárt feladatot
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 június 12, 13:20
Írta: istvan58 Dátum 2015 június 12, 13:20
szerintem a kis mutatója [#nevetes1]
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 június 12, 13:23
Írta: istvan58 Dátum 2015 június 12, 13:23
amugy ezekben az órákban legtöbször szinkron motor van.
Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2015 június 12, 13:23
Írta: Gyárfás Attila Dátum 2015 június 12, 13:23
Igen, gondoltam egy ilyen "fali" órára, de nekem egy kb. 300mm átmérőjű tárcsát kellene forgatnia, a kismutató "résznek".
Gyakorlatilag erről lenne szó,igaz gyorsított video:
Aspiral Clock
Gyakorlatilag erről lenne szó,igaz gyorsított video:
Aspiral Clock
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 június 12, 13:24
Írta: 000000000 Dátum 2015 június 12, 13:24
Ha van kedved tökölni adok neked GPS modult és antennát amiből kiszedhető atomóra pontosságú 1 ppm-es jel. (a szokásos feltétellel!:) )
Ezzel a jellel már van egy nagy pontosságú referenciád amivel érdemes foglalkozni.
Ha nem tévedek akkor ez egy nap alatt 86400 másodperc amit vagy elektronikusan osztasz le, hogy meglegyen az egy körülfordulásod, vagy a motoron mechanikusan, vagy mindkettő alkalmazva.
Leadshine vezérlőnél mikrolépést beállítva a mechanikus áttétel mérete csökkenthető lenne. (sajnos ez nem 12 voltos)
Például 6400-as mikrolépésnél csak 1:13.5 áttétel kellene kihozni.
Így jócskán plusz nyomatékhoz is jutsz.
Gondolom távcsőhöz lesz.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 június 12, 13:28
Írta: 000000000 Dátum 2015 június 12, 13:28
Akkor mégsem távcső :D
Cím: Re:Léptetőmotor
Írta: VighLajos Dátum 2015 június 12, 13:28
Írta: VighLajos Dátum 2015 június 12, 13:28
szerintem is.
A csillagászati ekvatoriális távcsövek 24 óra alatt tesznek meg egy fordulatot, bár ez attól függ, hogy a Nap követésére, vagy csillag követésére van beállítva.
Léptetőmotor, csigakerék konstrukciók vannak. Az órajelet ki lehetne csatolni DCF-vevőből.
A csillagászati ekvatoriális távcsövek 24 óra alatt tesznek meg egy fordulatot, bár ez attól függ, hogy a Nap követésére, vagy csillag követésére van beállítva.
Léptetőmotor, csigakerék konstrukciók vannak. Az órajelet ki lehetne csatolni DCF-vevőből.
Cím: Re:Léptetőmotor
Írta: VighLajos Dátum 2015 június 12, 13:30
Írta: VighLajos Dátum 2015 június 12, 13:30
...tényleg nem távcső...
Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2015 június 12, 13:31
Írta: Gyárfás Attila Dátum 2015 június 12, 13:31
A belinkelt órához kellene. :)
Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2015 június 12, 13:34
Írta: Gyárfás Attila Dátum 2015 június 12, 13:34
Mint látható nem egy bonyolult dologról van szó, itt egyedül a 12órás "pontos átforduás" a lényeg.
+ ahogy olvasgattam, van egy + nyomógomb amivel felgyorsítva a forgást beállítható az óra.
+ ahogy olvasgattam, van egy + nyomógomb amivel felgyorsítva a forgást beállítható az óra.
Cím: Re:Léptetőmotor
Írta: ebalint Dátum 2015 június 12, 13:43
Írta: ebalint Dátum 2015 június 12, 13:43
Ha eről van szó, akkor többet kell, hogy forogjon.
Ha más a spirál, akkor persze elég lehet 1 fordulat is 12 óra alatt.
Ha más a spirál, akkor persze elég lehet 1 fordulat is 12 óra alatt.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 június 12, 13:43
Írta: 000000000 Dátum 2015 június 12, 13:43
Itt a sarki hobbi elektronika boltban a léptető motor vezérlő 1400Ft egységcsomagban. 6(5) vezetékes, unipoláris motorhoz ! egész lépéses. 5A kimenő áram.
Áramkorlát max ellenállással állítható be, de ezért kicsi olcsó és megy 12 voltról :)
Mondjuk ehhez így bazinagy áttétel kell fabrikálni 1:432
bajielektronika.hu
Viszont ha nem érdekel a GPS időalap akkor megmarad.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 június 12, 13:46
Írta: 000000000 Dátum 2015 június 12, 13:46
12 óra / fordulatnál elég 1:216 áttétel is.
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2015 június 12, 16:17
Írta: Rabb Ferenc Dátum 2015 június 12, 16:17
Az enyémen a kis mutató is nagy! [#wave]
Cím: Re:Léptetőmotor
Írta: sanyi84 Dátum 2015 június 15, 22:02
Írta: sanyi84 Dátum 2015 június 15, 22:02
Topicjába a kérdés:
A Wantai dq546ma vezérlők megérik az árukat? Pont épp jó az árama a motorokhoz, picit nagyobb is mint 2.8 A . Ami ismeretlen az a maximum léptetési frekvencia. Videókon a hangja meggyőző. De ott a Longs-motor nak is a vezérlője, hasonló adatokkal.
A Wantai dq546ma vezérlők megérik az árukat? Pont épp jó az árama a motorokhoz, picit nagyobb is mint 2.8 A . Ami ismeretlen az a maximum léptetési frekvencia. Videókon a hangja meggyőző. De ott a Longs-motor nak is a vezérlője, hasonló adatokkal.
Cím: Re:Léptetőmotor
Írta: kozo Dátum 2015 június 16, 18:50
Írta: kozo Dátum 2015 június 16, 18:50
Több Wantai dq542ma vezérlőt is használtam . Csendes , megbízható holmi , ha sokat veszel még kedvezőbb is tud lenni az ár. Merem ajánlani Nema23-24 motorig .
Anno a Longs motor (nema34) hajtásaiból is próbáltam 1-2db ot , de az nem jött be ,nagyon nem folytam bele a miértbe .
Anno a Longs motor (nema34) hajtásaiból is próbáltam 1-2db ot , de az nem jött be ,nagyon nem folytam bele a miértbe .
Cím: Re:Léptetőmotor
Írta: morfeus Dátum 2015 június 22, 00:32
Írta: morfeus Dátum 2015 június 22, 00:32
Sziasztok!
Lenne egy kérdésem hozzátok ha választanom kellene egy 3 tengelyes vezérlő kártyát ami közvetlen tudja fogadni a léptető motorokat akkor melyik tipust ajánlanátok?
A másik esetben ha csak sima vezérlő kártya lenne hozzá plusszban 3db végfok a léptető motorokhoz akkor szintén ebben az esetben melyiket ajánlanátok?
Előre is köszönöm mindenkinek a hasznos tanácsokat!
UI: azt el is felejtettem,hogy egy eszterga CNC-re való átszerelés a cél nyílván 2 tengely vonzatában(vezérorsó és keresztszán)!
Lenne egy kérdésem hozzátok ha választanom kellene egy 3 tengelyes vezérlő kártyát ami közvetlen tudja fogadni a léptető motorokat akkor melyik tipust ajánlanátok?
A másik esetben ha csak sima vezérlő kártya lenne hozzá plusszban 3db végfok a léptető motorokhoz akkor szintén ebben az esetben melyiket ajánlanátok?
Előre is köszönöm mindenkinek a hasznos tanácsokat!
UI: azt el is felejtettem,hogy egy eszterga CNC-re való átszerelés a cél nyílván 2 tengely vonzatában(vezérorsó és keresztszán)!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 június 22, 00:58
Írta: 000000000 Dátum 2015 június 22, 00:58
Kösz, hogy válaszra se méltattál pár napja.
Amikor levélben egy egyszerű, de sürgős segítséget kértem.
Ilyen az élet:((
Cím: Re:Léptetőmotor
Írta: morfeus Dátum 2015 június 22, 01:04
Írta: morfeus Dátum 2015 június 22, 01:04
Vajon.....[#falbav]
Cím: Re:Léptetőmotor
Írta: sanyi84 Dátum 2015 július 05, 17:23
Írta: sanyi84 Dátum 2015 július 05, 17:23
Ilyen állatfajt... Ha más mondaná azt mondom menny már ez 5 fázisú, de én mondom, aki látta a belsejét. Szóval van két Nema34 0.72 fokos motorom ami 8 tekercses (nem 10) 8 kivezetéses szóval ez akkor két fázisú... Hihetetlen számomra mert még ilyet nem láttam, de nem csak 1.8 , 0.9 és nagyobb hanem 0.72 fokos léptetőmotor is van két fázisúba... Ritka egy állatfaj lehet. Minden esetre gyengének ítélem most forgatva kézzel, ám lehet erős ez teszek is rá nemsokára egy normális vezérlőt.
Cím: Re:Léptetőmotor
Írta: gaspa Dátum 2015 július 20, 16:46
Írta: gaspa Dátum 2015 július 20, 16:46
Segítséget kérnék,egy régebbi léptetőmotorhoz keresek vezérlőt. HDM-150-2000-8 típusa,2000 lépés/ford,8 fázisú,16 kivezetéses,100V 35W.
Cím: Re:Léptetőmotor
Írta: sanyi84 Dátum 2015 július 20, 17:29
Írta: sanyi84 Dátum 2015 július 20, 17:29
Teszteltem múltkor vázolt léptetőmotort. A tengelyt kézzel nem lehet lefogni . Ha 50 V ot adok a vezérlőnek a motor sípol, 30 V környékén szépen megy. Nyomatéka kicsi, valószínű kevés az áram, sőt biztos kevés. Szerintem maximum 24 V ról lehet hajtani mert melegszik ez a böszme nagy dög is, viszont kell neki az 5.6 A , de már 50 V ról nagyon melegszik, 30 ról is. Nem egyértelmű a nagy meleg miatt mi is a probléma :) , meddig is melegszik még .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 július 20, 22:15
Írta: 000000000 Dátum 2015 július 20, 22:15
Kérdésem a tapasztaltabbakhoz: érdemes 3 fázisú léptetőkkel foglalkozni? Egyáltalán mennyire ritka ez a fajta léptető?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 július 20, 22:33
Írta: 000000000 Dátum 2015 július 20, 22:33
A kétfázisú manapság az általános, és már jó ideje.
A korszerű 2 fázisú vezérlőkel mindent tudnak a 2 fázisú motorok.
Könnyen pótolható, és kezelhető.
A 3 fázisú egy külön világ. A maga rögös útjával. Van némi előnye. De én több hátrányát látok, a mi szempontunkból.
De, ha szereted az izgalmakat, kihívásokat, és a külön utakat, vágj bele.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 július 20, 22:45
Írta: 000000000 Dátum 2015 július 20, 22:45
Vannak ilyen vezérlőim, Berger Lahr, nagy fesz, nagy áram, kb 10000-es mikrolépéses, step dir rendszerű ..
Csak, hogy érdemes-e hozzá motorokat beszerezni, ez itt a nagy kérdés.
Csak, hogy érdemes-e hozzá motorokat beszerezni, ez itt a nagy kérdés.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 július 20, 22:59
Írta: 000000000 Dátum 2015 július 20, 22:59
Elsősorban a vezérlő a kritikus. De, ha már van, akkor érdemes megpróbálni. Általában olcsón szoktam látni motorokat. Persze ritka. Mert nincs igazán kereslet rá.
Szóval, ha már van vezérlőd. Akkor keress hozzá motort..
Jó néhány biztos lapul itt, ott vezérlő hiányában.
Sima járás, jó nyomaték görbe jellemzi. Ha jól emlékszem.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 július 20, 23:05
Írta: 000000000 Dátum 2015 július 20, 23:05
Danibá megint csak félre beszél !
3 fázisú léptetőmotorokat lehet kapni akár a klavió kft-nél is.
Berger Lahr régi vezérlő, de még mindig jobb mint bármelyik kínai!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 július 20, 23:17
Írta: 000000000 Dátum 2015 július 20, 23:17
Már megint be vagy lőve?
Ma egésznap az én sza--mat eszed?
Peersze hogy van a Klavionál új. Ott van a webárúházába.
Mondta, hogy újat akar venni?
Lehet, nem is passzol a régi Bergerjével.
Én, nem venék új motort hozzá.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 július 20, 23:35
Írta: 000000000 Dátum 2015 július 20, 23:35
Persze, csak amennyiért ott vehetek hozzá motort, nem ér annyit az egész vezérlés, táppal együtt ...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 július 20, 23:57
Írta: 000000000 Dátum 2015 július 20, 23:57
Hidd el, hogy jóval többet ér mint azt te gondolád !
A kínai vezérlőkkel össze sem hasonlítható.
Volt szerencsém 3 fázisú Berger Lahr vezérlős gép mach3 átalakításhoz,tehát tudom mit beszélek.
De inkább akkor hallgass a kitiltott de gerinctelenül visszakúszott Danibára aki azt se tudja eszik e vagy isszák ezt a dolgot!
Cím: Re:Léptetőmotor
Írta: Csuhás Dátum 2015 július 21, 00:05
Írta: Csuhás Dátum 2015 július 21, 00:05
Nem létezik hogy nem tudtok csak írni, gonosz megjegyzések nélkül..
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 július 21, 00:15
Írta: 000000000 Dátum 2015 július 21, 00:15
Nem létezik, hogy hagyod ezt, a provokátort tombolni, mocskolódni.
Bárhol, bárkinek segítek.
Néz be a Mach3 topikba is.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 július 21, 00:22
Írta: 000000000 Dátum 2015 július 21, 00:22
Tisztában vagyok vele, ipari cucc, eleve többet tud, mint a gagyi kínaiak.
Cím: Re:Léptetőmotor
Írta: Csuhás Dátum 2015 július 21, 00:23
Írta: Csuhás Dátum 2015 július 21, 00:23
Jó éjt, remélem reggel nem kell takarítani.
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2015 július 21, 00:35
Írta: jani300 Dátum 2015 július 21, 00:35
Az én első léptetőm VRDM 397/50 LWB. 325V 175A
Szerintem reménytelen hogy lesz hozzá vezérlő .
Szerintem reménytelen hogy lesz hozzá vezérlő .
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2015 július 21, 00:36
Írta: jani300 Dátum 2015 július 21, 00:36
1,75A , 2 Nm
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 július 21, 07:54
Írta: 000000000 Dátum 2015 július 21, 07:54
Ha tisztában vagy, hogy egy ipari cucc, akkor mi a baj azzal ha egy 6.8 Nm-es motor ennyibe kerül ?
Nézz meg egy ugyanekkora új 2 fázisú motor mennyibe fáj és utána pattogj az árán.
A régebbi még nem hibrid motorok eléggé zsákbamacskák, elég ha megütöttét a tengelyét már is csak a fele, harmada nyomatékot tudják, a szétszedés okozta lemágneseződésről nem is beszélve.
Tehát lehet vadászni motort hozzá , de aki tudja mit ad el az nem fogja csínján bánni az árral és a fent említett tényezők akkor is benne vannak.
Aki meg ipari vezérlővel gépet épít az biztos nem játék gépet csinál tehát a nem 0.5Nm-es motor fog rátenni, és a nagy motornak bizony ára van!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 július 21, 08:01
Írta: 000000000 Dátum 2015 július 21, 08:01
Danika nyugodjál meg és inkább húzd meg magad, mert nem én vagyok a megtűrt személy !
Nem gondolod, hogy más néven vissza regisztrálásoddal és besunnyogásoddal egyfajta módon arcul köpted a fórumozókat akik egységesen kiszavaztak ?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 július 21, 12:49
Írta: 000000000 Dátum 2015 július 21, 12:49
Most nem tudom mit izélsz, feltettem egyszerű kérdéseket. Nem idejöttem panaszkodni, hogy mindenki drágán akar adni hozzá motort, meg nem rinyálok, hogy húú de krva drágán lehet hozzá venni.
Haverom a melóhelyén gépátalakításból hozzájutott a vezérlőkhöz, én meg megkaptam.
Ha nagyon akarok, szerzek hozzá motorokat, ha nem, akkor eladom a vezérlőket, vagy alkatrészként felhasználom. Ennyi.
Haverom a melóhelyén gépátalakításból hozzájutott a vezérlőkhöz, én meg megkaptam.
Ha nagyon akarok, szerzek hozzá motorokat, ha nem, akkor eladom a vezérlőket, vagy alkatrészként felhasználom. Ennyi.
Cím: Re:Léptetőmotor
Írta: d30xhrezp Dátum 2015 július 21, 16:53
Írta: d30xhrezp Dátum 2015 július 21, 16:53
Szia!
Ha érdekel,tudok küldeni egy kis 3f. motort.
Elég régi,nem nagy teljesítményű.De talán próbára jó.Természetesen ingyen,a jövő héten.
Ha érdekel,tudok küldeni egy kis 3f. motort.
Elég régi,nem nagy teljesítményű.De talán próbára jó.Természetesen ingyen,a jövő héten.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 július 21, 17:29
Írta: 000000000 Dátum 2015 július 21, 17:29
Végül is arra jó lenne, hogy kiderítsem, hogy miként viselkedik egy ilyen 3fázisú vezérlő, kis tapasztalatszerzésre. Hogy egyáltalán érdemes-e foglalkoznom vele, vagy passzoljam tovább.
Köszönöm a felajánlást, elfogadom!
Köszönöm a felajánlást, elfogadom!
Cím: Re:Léptetőmotor
Írta: d30xhrezp Dátum 2015 július 21, 20:58
Írta: d30xhrezp Dátum 2015 július 21, 20:58
Szia!
Akkor légy szíves küld az email címemre az adatokat ahová küldhetem.
Üdv.
Akkor légy szíves küld az email címemre az adatokat ahová küldhetem.
Üdv.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2015 augusztus 29, 15:16
Írta: ANTAL GÁBOR Dátum 2015 augusztus 29, 15:16
Idézet Zsuffa Attila Villamos hajtások és vezérlések cikkéből :
" a mikrolépések számának növelése az egy lépéshez tartozó nyomaték drasztikus csökkenéséhez vezet " M mikro = M *sin ( 90/n)
A kérdésem : Az állítás a cikk megírásakor használatos PWM es vezérlőkre vonatkozott és mára már megváltozott a modern ( főleg a digitális ) vezérlők megjelenésével ? Mi a helyzet e téren ?
" a mikrolépések számának növelése az egy lépéshez tartozó nyomaték drasztikus csökkenéséhez vezet " M mikro = M *sin ( 90/n)
A kérdésem : Az állítás a cikk megírásakor használatos PWM es vezérlőkre vonatkozott és mára már megváltozott a modern ( főleg a digitális ) vezérlők megjelenésével ? Mi a helyzet e téren ?
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2015 augusztus 29, 16:42
Írta: B.Zoltán Dátum 2015 augusztus 29, 16:42
Cím: Re:Léptetőmotor
Írta: keri Dátum 2015 augusztus 29, 17:09
Írta: keri Dátum 2015 augusztus 29, 17:09
Teljesen korrekt állítás.
A növelt felbontású egy lépéshez tartozó nyomaték szükségszerűen csökken.
Gondold el. Adott két egymásra 90 fokos egységnyi vektor, a motor pozíciója és nyomatéka a kettő összegzéséből adódik.
A mikrolépés esetén a vektorok nem egyszerűen előjelet váltanak, hanem modulálva vannak, vagyis két pozíció között lényegesen kisebb a potenciál különbség.
Ennek ellenére, vagy éppen ezért érdemes használni, mert a léptetéssel járó rezonanciák is ugyan ilyen arányban csökkennek, illetve javítja a ráállás felbontását is.
Modern digitális vezérlésnél ahol az áramot mindig optimálisan tartja, terhelés és fordulatszám függvényében, ott legfeljebb alacsonyabb fordulatokon van előnye.
A növelt felbontású egy lépéshez tartozó nyomaték szükségszerűen csökken.
Gondold el. Adott két egymásra 90 fokos egységnyi vektor, a motor pozíciója és nyomatéka a kettő összegzéséből adódik.
A mikrolépés esetén a vektorok nem egyszerűen előjelet váltanak, hanem modulálva vannak, vagyis két pozíció között lényegesen kisebb a potenciál különbség.
Ennek ellenére, vagy éppen ezért érdemes használni, mert a léptetéssel járó rezonanciák is ugyan ilyen arányban csökkennek, illetve javítja a ráállás felbontását is.
Modern digitális vezérlésnél ahol az áramot mindig optimálisan tartja, terhelés és fordulatszám függvényében, ott legfeljebb alacsonyabb fordulatokon van előnye.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2015 augusztus 29, 17:42
Írta: ANTAL GÁBOR Dátum 2015 augusztus 29, 17:42
Köszönöm a válaszokat ( és a konzultációt K.Lacival ) A linkelt topikban Svejk szemléletes okfejtése nagyon tetszett. Magam szavaival összefoglalom ( talán nem minősül "szakmai sületlenségnek ") A mikrolépéssel kétfázisú kvázi szinusz hullámmal tápláljuk a motort ami felfogható egy sokpólusú ( pl 100) szinkronmotornak. A szinkronmotornál pedig fellép az un terhelési szög ( a szakirodalomban béta ) A terhelés hatására a forgórész pillanatnyi szöghelyzete lemarad a tápláló szinusztól . ("nyúlósság " ) Ha túl nagy a terhelés akkor a szinkron motor kiesik a szinkronból és megáll
Cím: Re:Léptetőmotor
Írta: harima Dátum 2015 augusztus 31, 18:17
Írta: harima Dátum 2015 augusztus 31, 18:17
Segítséget kérnék.
A 8 vezetékes bipoláris léptetőmotort
sorosan vagy párhuzamosan jobb bekötni?
A 8 vezetékes bipoláris léptetőmotort
sorosan vagy párhuzamosan jobb bekötni?
Cím: Re:Léptetőmotor
Írta: nonopapa Dátum 2015 augusztus 31, 19:14
Írta: nonopapa Dátum 2015 augusztus 31, 19:14
Mindenhogy jó,de legjobb a zsíroskenyér:-))
Párhuzamosan kötve a tekercseket kétszer erősebb lesz,viszont dupla áramot is kajál...sorosan gyengébb de beéri kevesebb árammal.
Párhuzamosan kötve a tekercseket kétszer erősebb lesz,viszont dupla áramot is kajál...sorosan gyengébb de beéri kevesebb árammal.
Cím: Re:Léptetőmotor
Írta: harima Dátum 2015 augusztus 31, 19:20
Írta: harima Dátum 2015 augusztus 31, 19:20
Köszönöm a segítséget.
akkor maradok a párhuzamos bekötésnél.
akkor maradok a párhuzamos bekötésnél.
Cím: Re:Léptetőmotor
Írta: u6p5jr23k Dátum 2015 augusztus 31, 20:15
Írta: u6p5jr23k Dátum 2015 augusztus 31, 20:15
Szia harima.
Engedd meh, hogy kezdőként én is hozzászóljak.
Jelenlegi "gépem" egy bútorlapos mechanika, ami a 2014-es Rádiótechnika Évkönyv alapján készült. A képek alapján a motor pont olyan... Szinte ingyen jutottam hozzá. 24 voltos unipoláris volt. Addig agyaltam, hogy sikerült átkötnöm 8 vezetékesre.
Ezek után persze a próbálkozás jött a különböző bekötésekre. A vezérlést egy TB6600 kínai DYV268 vezérlő végzi. A párhuzamos bekötés már a beállítható legkisebb áram esetén is elképesztő eredményt hozott, legalábbis számomra. Az "orsó" 8 mm-es menetes szár. A mechanika kb. 30 kg. Már írtam egyszer, hogy igencsak meglepődtem mikor a gép letolta magát az asztalról. Bútorlapot martam át kétélű maróval 3 fogásból.
Az egészben az az érdekes számomra, hogy a motor 50 mm x 50 mm.
Végezetül azt javaslom, hogy próbáld ki a különböző bekötések hatását a sebességre és a nyomatékra.
Engedd meh, hogy kezdőként én is hozzászóljak.
Jelenlegi "gépem" egy bútorlapos mechanika, ami a 2014-es Rádiótechnika Évkönyv alapján készült. A képek alapján a motor pont olyan... Szinte ingyen jutottam hozzá. 24 voltos unipoláris volt. Addig agyaltam, hogy sikerült átkötnöm 8 vezetékesre.
Ezek után persze a próbálkozás jött a különböző bekötésekre. A vezérlést egy TB6600 kínai DYV268 vezérlő végzi. A párhuzamos bekötés már a beállítható legkisebb áram esetén is elképesztő eredményt hozott, legalábbis számomra. Az "orsó" 8 mm-es menetes szár. A mechanika kb. 30 kg. Már írtam egyszer, hogy igencsak meglepődtem mikor a gép letolta magát az asztalról. Bútorlapot martam át kétélű maróval 3 fogásból.
Az egészben az az érdekes számomra, hogy a motor 50 mm x 50 mm.
Végezetül azt javaslom, hogy próbáld ki a különböző bekötések hatását a sebességre és a nyomatékra.
Cím: Re:Léptetőmotor
Írta: harima Dátum 2015 augusztus 31, 20:57
Írta: harima Dátum 2015 augusztus 31, 20:57
Szia!
Kösz a tanácsot, majd kipróbálom.
Kösz a tanácsot, majd kipróbálom.
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2015 október 18, 20:46
Írta: e3h0cv4ph Dátum 2015 október 18, 20:46
Sziasztok.
Léptetőmotoros hajtáshoz számolok tápegység teljesítményt és egy kicsit elbizonytalanodtam.
Egy 3 tengelyes gépen van 3 db kétfázisú univerzális (8 vezetékes) léptetőmotor I=3A R=1ohm (U=40V) és M=1,4Nm -es motor.
Én úgy számoltam (cáfoljatok meg ha tévedek) ha álló helyzetben van a motor (és mondjuk nincs pihentetés bekapcsolva - tudjuk, hogy kell de a számolás kedvéért most tekintsünk el tőle), ilyenkor az 1 ohmos tekercsen 3A áram folyik 3 volt mellet, ez 9W teljesítmény. Forgás közben ennél csak kisebb lesz a felvett teljesítmény (az induktív ellenállás miatt).
Tehát 9W * 3 motor az 27W. Akkor elméletileg egy 30 W -os tápegység elég is lehetne (tudom, hogy a gyakorlatban a biztonsági tartalék miatt 1,5 .... 2 szeresére többre kell méretezni de most csak az elméleti határokat nézzük).
Ez nekem kevésnek tűnik, valamit elszámoltam volna?
Biztos volt már szó róla korábban (ha tudjátok mikor nekem az is jó).
Léptetőmotoros hajtáshoz számolok tápegység teljesítményt és egy kicsit elbizonytalanodtam.
Egy 3 tengelyes gépen van 3 db kétfázisú univerzális (8 vezetékes) léptetőmotor I=3A R=1ohm (U=40V) és M=1,4Nm -es motor.
Én úgy számoltam (cáfoljatok meg ha tévedek) ha álló helyzetben van a motor (és mondjuk nincs pihentetés bekapcsolva - tudjuk, hogy kell de a számolás kedvéért most tekintsünk el tőle), ilyenkor az 1 ohmos tekercsen 3A áram folyik 3 volt mellet, ez 9W teljesítmény. Forgás közben ennél csak kisebb lesz a felvett teljesítmény (az induktív ellenállás miatt).
Tehát 9W * 3 motor az 27W. Akkor elméletileg egy 30 W -os tápegység elég is lehetne (tudom, hogy a gyakorlatban a biztonsági tartalék miatt 1,5 .... 2 szeresére többre kell méretezni de most csak az elméleti határokat nézzük).
Ez nekem kevésnek tűnik, valamit elszámoltam volna?
Biztos volt már szó róla korábban (ha tudjátok mikor nekem az is jó).
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2015 október 18, 21:25
Írta: Szalai György Dátum 2015 október 18, 21:25
Szerintem a motorvezérlőd nem három voltról fogja léptetgetni a motortekercseket, hanem vagy úgy negyvenről, rövid pulzusok sorozatával, amik között szünetek vannak.
Így lesz a csúcs és a szünet átlaga a névleges áram közelében, a pillanatnyi csúcsok meg jóval az felett, ha szerencséd van.
Szóval ki kell szolgálni vagy negyven volton háromszor három ampert, ha száz százalék egyidejűséggel számolsz.
Az úgy négyszáz watt környéke, de szerintem a kétharmada is bőven elég, az egyidejűség miatt.
De majd megmondják a tapasztaltak, hogy mi a pont elég.
Így lesz a csúcs és a szünet átlaga a névleges áram közelében, a pillanatnyi csúcsok meg jóval az felett, ha szerencséd van.
Szóval ki kell szolgálni vagy negyven volton háromszor három ampert, ha száz százalék egyidejűséggel számolsz.
Az úgy négyszáz watt környéke, de szerintem a kétharmada is bőven elég, az egyidejűség miatt.
De majd megmondják a tapasztaltak, hogy mi a pont elég.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2015 október 18, 21:33
Írta: s7manbs8 Dátum 2015 október 18, 21:33
Ezt jól kiszámoltad. :) Az kicsit lehet sok lenne, motoronként vagy 30W-40W fogyhat kb. szerintem ilyesmi méretnél.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 október 18, 22:46
Írta: istvan58 Dátum 2015 október 18, 22:46
a gépem épitése allat sokszor mértem a fogyasztást, monhatom hogy nagy fordulaton simán megteszi a 3-A-ert a vezérlő 62V rol....mig alacsony fordulaton csak néhány száz mA-ert.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 október 18, 22:47
Írta: istvan58 Dátum 2015 október 18, 22:47
megteszi=megeszi
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2015 október 18, 22:50
Írta: s7manbs8 Dátum 2015 október 18, 22:50
A vezérlőtől is függ biztos, hogy mennyi kell neki, hogyan van hajtva, van e energia visszanyerés vagy mindent eldisszipál inkább, de nem a motor fog olyan sokat elfűteni.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 október 18, 23:03
Írta: istvan58 Dátum 2015 október 18, 23:03
Digitális vezérlőm van....
de sajnos igen...a motor fűti el. Amikor csak kis sebességel hajtom semi gond de ha sokat hajtom max sebességel igen csak izzik....hamar eléri a 80 fokot.
de sajnos igen...a motor fűti el. Amikor csak kis sebességel hajtom semi gond de ha sokat hajtom max sebességel igen csak izzik....hamar eléri a 80 fokot.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 október 18, 23:05
Írta: istvan58 Dátum 2015 október 18, 23:05
a vezérlők hidegek.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 október 18, 23:09
Írta: istvan58 Dátum 2015 október 18, 23:09
amugy az sem éertem miért melegszik jobban a motor ha 62V rol megy mint 40 röl? Hiszen a max áram csak 3.5A, a motoron meg max 4-5 V ig megy fell a feszültség.Tulajdonképen csak a felfutás meredeksége nagyobb 62V-on. De a melegedés számottevően megnő.
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2015 október 19, 00:09
Írta: e3h0cv4ph Dátum 2015 október 19, 00:09
Szia a PWM vezérlést lényegét értem (nagyobb feszültség akár 10 szerese a névlegesnek és rövid impulzusok)
De azzal nem lehet számolni, hogy 40V szor 3A szor 3 motor. Mert a 40 volt az impulzussorozatnak a csúcsértéke de a kitöltési tényezője csak mondjuk 10% ezért az effektív értéke 4V lesz, és akkor mindjárt csak 4V szor 3A szor 3 motor. Persze ezt a 10% csak behasaltam.
Mért valaki kitöltési tényezőt egy ilyen esetben?
De azzal nem lehet számolni, hogy 40V szor 3A szor 3 motor. Mert a 40 volt az impulzussorozatnak a csúcsértéke de a kitöltési tényezője csak mondjuk 10% ezért az effektív értéke 4V lesz, és akkor mindjárt csak 4V szor 3A szor 3 motor. Persze ezt a 10% csak behasaltam.
Mért valaki kitöltési tényezőt egy ilyen esetben?
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 október 19, 07:42
Írta: istvan58 Dátum 2015 október 19, 07:42
Szia,
nyugodtam szamolhatsz a 40V x 3A-el, mint lenneb említettem nagy fordulaton a vezérlő felveszi a 3A -ert, mi kissebb fordulaton beéri néhány száz mA-el. Amugy a vezérlő leírásában azt javasolják hogy:
analog táp esetén számoljunk a max áram 2/3-ával,
kapcsoló üzemü esetén peddig a max áramal.
nyugodtam szamolhatsz a 40V x 3A-el, mint lenneb említettem nagy fordulaton a vezérlő felveszi a 3A -ert, mi kissebb fordulaton beéri néhány száz mA-el. Amugy a vezérlő leírásában azt javasolják hogy:
analog táp esetén számoljunk a max áram 2/3-ával,
kapcsoló üzemü esetén peddig a max áramal.
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2015 október 19, 10:38
Írta: e3h0cv4ph Dátum 2015 október 19, 10:38
Szia,
Nem vita, hogy felveszi 40V-on a 3A-t de csak impulzus jelleggel (mondjuk 10%-os kitöltési tényezővel) tehát ha átlagot számolunk (effektív érték) akkor kb. 0,3A x 40V azaz 8W motoronként (és ezt kell akkor még túlméretezni 1,5 ....2 szeresére).
Még mindíg nem értem, hogy az elméleti számolásommal mi a probléma? Elég nagy a különbség az általam számolt és általad említett érték között!
Továbbá nem értem, hogy a 2/3-os szorzó honnan jön? Ez melyik képletek a melyik konstansa?
Nem vita, hogy felveszi 40V-on a 3A-t de csak impulzus jelleggel (mondjuk 10%-os kitöltési tényezővel) tehát ha átlagot számolunk (effektív érték) akkor kb. 0,3A x 40V azaz 8W motoronként (és ezt kell akkor még túlméretezni 1,5 ....2 szeresére).
Még mindíg nem értem, hogy az elméleti számolásommal mi a probléma? Elég nagy a különbség az általam számolt és általad említett érték között!
Továbbá nem értem, hogy a 2/3-os szorzó honnan jön? Ez melyik képletek a melyik konstansa?
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 október 19, 11:12
Írta: istvan58 Dátum 2015 október 19, 11:12
az ampermérő efektiv áramot mér!
igy mértem a 3 A-ert.
igy mértem a 3 A-ert.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 október 19, 11:14
Írta: istvan58 Dátum 2015 október 19, 11:14
Csak anyyi hogy mivel nem álandó a terhelés azért analog tápnál nem kell a maximumal számolni, de kapcsoló üzemnél azért kell a maximumal mer az áramkorlát letilt.
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 október 19, 11:16
Írta: istvan58 Dátum 2015 október 19, 11:16
ha gondolod akkor délután beköthetek egy ampermérőt az AM882 meghajtóm tápvonalába és megmérem az áramfelvételt külömböző sebeségeknél.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2015 október 19, 14:30
Írta: svejk Dátum 2015 október 19, 14:30
A léptetőmotort áramgenerátorosan illik meghajtani.
Álló helyzetben nem indukálódik ellenelekromotoros feszültség, tehát ott jó a számításod.
Ilyenkor a meghajtó mint egy step-down kapcsolózemű tápegység működik, azaz a 40 V-os tápegységból elég pár száz mA-t kivenni, hogy a motorra a 3V / 3A jusson.
De ahogy elkezded a fordulatot növelni, növekszik a generált ellenelektromotoros feszültség, és ez mintegy kivonódik a tépfeszültségből.
Hogy tudd tartani a tekercsekbe pumpált áramot, muszáj a tápfeszültséget növelni.
Ezért aztán meg fog nőni a tápból felvett teljesítmény.
A kínai vezérlőket méregettem, valahol az elektronika topicban le is írtam az eredményeket.
Egy ilyen 3V 3A-es motor 300-400-as fordulaton be fog szlopálni úgy 1,5-2A-t a 40 V-os tápból.
De számoljunk másképp.
Tételezzük fel, hogy igaz amit az adatlapok írnak, hogy 300-as fordulaton még leadja az 1,4 Nm-t a motorod.
Ez azt jelenti, hogy a tengelyen leadott mechanikai teljesítmény 44 W.
Tehát ha nem lenne semmilyen veszteség akkor is bele kell raknod ezt a villamos teljesítményt a motorba 300-as fordulaton.
És ez máris több mint 1A 40V-on, erre jönnek a veszteségek.
Álló helyzetben nem indukálódik ellenelekromotoros feszültség, tehát ott jó a számításod.
Ilyenkor a meghajtó mint egy step-down kapcsolózemű tápegység működik, azaz a 40 V-os tápegységból elég pár száz mA-t kivenni, hogy a motorra a 3V / 3A jusson.
De ahogy elkezded a fordulatot növelni, növekszik a generált ellenelektromotoros feszültség, és ez mintegy kivonódik a tépfeszültségből.
Hogy tudd tartani a tekercsekbe pumpált áramot, muszáj a tápfeszültséget növelni.
Ezért aztán meg fog nőni a tápból felvett teljesítmény.
A kínai vezérlőket méregettem, valahol az elektronika topicban le is írtam az eredményeket.
Egy ilyen 3V 3A-es motor 300-400-as fordulaton be fog szlopálni úgy 1,5-2A-t a 40 V-os tápból.
De számoljunk másképp.
Tételezzük fel, hogy igaz amit az adatlapok írnak, hogy 300-as fordulaton még leadja az 1,4 Nm-t a motorod.
Ez azt jelenti, hogy a tengelyen leadott mechanikai teljesítmény 44 W.
Tehát ha nem lenne semmilyen veszteség akkor is bele kell raknod ezt a villamos teljesítményt a motorba 300-as fordulaton.
És ez máris több mint 1A 40V-on, erre jönnek a veszteségek.
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2015 október 19, 22:50
Írta: e3h0cv4ph Dátum 2015 október 19, 22:50
Szia,
Köszönöm, már értem.
Még egy B kérdés ugyanezzel a motorral. 8 kivezetéses univerzális motorról van szó ha a tekercseket párhuzamosan kapcsolom (ha jól tudom ez a javasolt) akkor az így kötött tekercsekre adhatom az adatlap szerinti 3A kétszeresét azaz 6A-t is? (ha jól tudom a 3A egy tekercsre van megadva)
Vagy a melegedés miatt ezt nem lehet duplázni? Itt mi a gyakorlat? És gondolom akkor a tápot is ennek megfelelően duplázni?
Köszönöm, már értem.
Még egy B kérdés ugyanezzel a motorral. 8 kivezetéses univerzális motorról van szó ha a tekercseket párhuzamosan kapcsolom (ha jól tudom ez a javasolt) akkor az így kötött tekercsekre adhatom az adatlap szerinti 3A kétszeresét azaz 6A-t is? (ha jól tudom a 3A egy tekercsre van megadva)
Vagy a melegedés miatt ezt nem lehet duplázni? Itt mi a gyakorlat? És gondolom akkor a tápot is ennek megfelelően duplázni?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2015 október 20, 07:55
Írta: svejk Dátum 2015 október 20, 07:55
Valószínűleg igen, de erre az adatlapja adja meg a tuti válszt.
Cím: Re:Léptetőmotor
Írta: xfg6v697j Dátum 2015 október 20, 12:35
Írta: xfg6v697j Dátum 2015 október 20, 12:35
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2015 október 20, 17:43
Írta: Vetesi75 Dátum 2015 október 20, 17:43
Szabad kérdeznem, mivel mérted, hogy ennyire biztos vagy a mért érték "effektív" voltában?
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 október 20, 22:57
Írta: istvan58 Dátum 2015 október 20, 22:57
Valamit lehet félreértettél.
Nem a motor áramot mértem hanem a vezerlő aramfelvételét
Nem a motor áramot mértem hanem a vezerlő aramfelvételét
Cím: Re:Léptetőmotor
Írta: 2f428kduf Dátum 2015 október 22, 16:42
Írta: 2f428kduf Dátum 2015 október 22, 16:42
Mindnyájan tudjuk, hogy a közkézen forgó kézi műszerek az effektív értéket csak szinuszos váltóáram esetében mérnek. Egyenáram esetében ennek nincs értelme, de kell ezen lovagolni?
Cím: Re:Léptetőmotor
Írta: xabi Dátum 2015 október 23, 07:17
Írta: xabi Dátum 2015 október 23, 07:17
Kelepeisz Lajos topikjába lézer masinához (kis tömeg, nagy sebesség, nagy gyorsulás) próbáltam mechanikai számításokkal tanácsot adni. Jól látható kis tömeg nagy gyorsításához elé kis erők kellenek, a motor saját tehetetlensége szinte nehezebben gyorsítható...
Azt nem tudom hogy a step-dir vezérlő illetve a léptetőmotor induktivitása lehetővé teszi-e ezt a gyorsulást (csak a motort vizsgálva).
Mondjuk 2Nm tartó nyomatékú motor,a szán gyorsítása 1:1 áttétellel, a szán gyorsulása 30000mm/s2 (3G), a motor 0-ról 600 1/min-re 0,024sec alatt kéne gyorsulnia.
Sajnos én nem vagyok CNC közelébe a hétvégén, ha valaki kipróbálná a következő tesztet :
Az X vagy y motorjáról szedje le a bordás szíjat csak a bordás kerék maradjon (csak a motor forogjon), jelölje meg filccel a kiindulási pontot. Utána a következő G kódot futtassa mondjuk 50x
G0 x300
G0 x0
Motor vezérlő : 1600 mikró lépése állítva
Mach3 vagy UCCNC beállítások :
Steps/units : 22,15
Velocity (units/min) : 43332
Acceleration (units/s2) : induljunk 1000-el
Az Acceleration-t kellene növelni amíg a motor nem pörög fel vagy téveszt (1000,5000,10000,20000,30000,40000,innen már necces :))
Ha valaki már csinált ilyet, és nem találtam meg kérem linkelje be.
Azt nem tudom hogy a step-dir vezérlő illetve a léptetőmotor induktivitása lehetővé teszi-e ezt a gyorsulást (csak a motort vizsgálva).
Mondjuk 2Nm tartó nyomatékú motor,a szán gyorsítása 1:1 áttétellel, a szán gyorsulása 30000mm/s2 (3G), a motor 0-ról 600 1/min-re 0,024sec alatt kéne gyorsulnia.
Sajnos én nem vagyok CNC közelébe a hétvégén, ha valaki kipróbálná a következő tesztet :
Az X vagy y motorjáról szedje le a bordás szíjat csak a bordás kerék maradjon (csak a motor forogjon), jelölje meg filccel a kiindulási pontot. Utána a következő G kódot futtassa mondjuk 50x
G0 x300
G0 x0
Motor vezérlő : 1600 mikró lépése állítva
Mach3 vagy UCCNC beállítások :
Steps/units : 22,15
Velocity (units/min) : 43332
Acceleration (units/s2) : induljunk 1000-el
Az Acceleration-t kellene növelni amíg a motor nem pörög fel vagy téveszt (1000,5000,10000,20000,30000,40000,innen már necces :))
Ha valaki már csinált ilyet, és nem találtam meg kérem linkelje be.
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2015 október 23, 10:21
Írta: Vetesi75 Dátum 2015 október 23, 10:21
Szerintem, ha feltesszük azt a kérdést is, hogy a vezérlő által felvett "egyenáram", mekkora amplitúdójú és milyen jellegű (frekvencia/jelalak) váltakozóáramú összetevőt tartalmaz, akkor igenis érdemes vele foglalkozni.
Cím: Re:Léptetőmotor
Írta: 2f428kduf Dátum 2015 október 23, 12:00
Írta: 2f428kduf Dátum 2015 október 23, 12:00
Én ilyen mérésekre a régi jó mutatós "hideg" müszereket hesználom, a digitális össze-vissza jeltől megbolondul. Most restauráltam egy T34-es tank umformerét, ami 24 votból úgy 200-at csinált az adó-vevőnek, no a 200 volt egyenfeszültségét nem mutatta a digi, a zavarok miatt, a mutatós, "tömege" miatt átlagol.
Ha rendes zavarszűrő van a táp bemenetén, azért mérhatő.
Ha rendes zavarszűrő van a táp bemenetén, azért mérhatő.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2015 október 23, 17:28
Írta: s7manbs8 Dátum 2015 október 23, 17:28
Csak ránézésre hogy 2 század másodperc alatt felgyorsuljon 600-ra az már eleve lehetetlennek tűnik a motor magában is.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 november 03, 20:33
Írta: 000000000 Dátum 2015 november 03, 20:33
Van a munkahelyen egy panel mrásra használt kis "CNC" gép, abban NEMA17 méretű motorok vannak, viszont a dolog érdekessége hogy a motor 5 fázisú.
Mi előnye van egy 5 fázisú motornak a két fázisúhoz képest, illetve ha van akkor miért nem terjedt el?
Mi előnye van egy 5 fázisú motornak a két fázisúhoz képest, illetve ha van akkor miért nem terjedt el?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 november 03, 21:05
Írta: 000000000 Dátum 2015 november 03, 21:05
A vezérlő bazi drága hozzá és a 2 fázisú motorok mikrolépéses vezérlése miatt okafogyott lett az az alap felbontás.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2015 november 03, 22:15
Írta: Szalai György Dátum 2015 november 03, 22:15
„Mi előnye van egy 5 fázisú motornak a kétfázisúhoz képest”
Nem hobby cucc az biztos. Van még neki plusz három fázisa. Ettől forgás közben egyenletesebb a nyomatéka.
Míg a kétfázisú motor fél lépésben elveszíti a nyomaték 30-40%-át, addig az ötfázisú motor ezt a felbontást egészlépésből megteszi, nyomaték vesztesség nélkül.
De fél lépésben is csak a nyomaték 5%-át veszti.
Forgás közben ezek a nyomatékingadozások a kétfázisú motorban jelentős rezgést okoznak.
Az ötfázisúban ez az ingadozás jelentéktelen, a futása sima.
A kisebb lépésköz és egyenletes nyomatékleadás miatt a lépésvesztés kockázata lényegesen kisebb, a dinamika pedig nagyobb az ötfázisú motor esetében.
„ha van akkor miért nem terjedt el”
Oda teszik, ahová indokolt, máshova meg jó a kétfázisú is.
A mai motormeghajtó elektronikák, ha a kétfázisú léptetőmotorból nem, de a háromfázisúból kihozzák azt, amit a régi ötfázisúak tudtak.
Nem hobby cucc az biztos. Van még neki plusz három fázisa. Ettől forgás közben egyenletesebb a nyomatéka.
Míg a kétfázisú motor fél lépésben elveszíti a nyomaték 30-40%-át, addig az ötfázisú motor ezt a felbontást egészlépésből megteszi, nyomaték vesztesség nélkül.
De fél lépésben is csak a nyomaték 5%-át veszti.
Forgás közben ezek a nyomatékingadozások a kétfázisú motorban jelentős rezgést okoznak.
Az ötfázisúban ez az ingadozás jelentéktelen, a futása sima.
A kisebb lépésköz és egyenletes nyomatékleadás miatt a lépésvesztés kockázata lényegesen kisebb, a dinamika pedig nagyobb az ötfázisú motor esetében.
„ha van akkor miért nem terjedt el”
Oda teszik, ahová indokolt, máshova meg jó a kétfázisú is.
A mai motormeghajtó elektronikák, ha a kétfázisú léptetőmotorból nem, de a háromfázisúból kihozzák azt, amit a régi ötfázisúak tudtak.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2015 november 03, 22:33
Írta: keri Dátum 2015 november 03, 22:33
Komplikált, drága, akkor meg meg már szervót is lehet használni.
Nekem van egy régi ipari, de a kínai kétfázisú készletem is jobb már. Méretre, teljesítményre egyenletességre. Számomra csak annyi előnye volt hogy kilóra vettem hulladék árban.
Ha kell eladom neked :)
Nekem van egy régi ipari, de a kínai kétfázisú készletem is jobb már. Méretre, teljesítményre egyenletességre. Számomra csak annyi előnye volt hogy kilóra vettem hulladék árban.
Ha kell eladom neked :)
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 november 04, 15:54
Írta: istvan58 Dátum 2015 november 04, 15:54
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 november 05, 20:03
Írta: 000000000 Dátum 2015 november 05, 20:03
A vezérlő semmivel nem lenne drágább csak nem 4 kapcsoló elem kell bele hanem 10 de ezek fillérek, egy féllépésest magam is le tudnék programozni egy mikrokontrollerbe ( az említett gépbe is ilyen vezérlő van nem drága cél IC) ami 1000lépé / fordulat lenne.
Ha már a mikrolépésnél tartunk nekem ugye van egy 3D nyomtatóm 1/16 lépésre beállítva.
Ahogy nézem a nyomtatást a sorok nem egymás fölé kerülnek hanem kisebb mint +- 0,1mm hiba van bennük de nem lépésvesztés miatt, gondolom azért mert a motor a rá ható nyomatékok miatt nem pont oda áll be ahová az áramok aránya megadná.
Tulajdonképpen a mikrolépés a lassító áttétel kiváltása miatt terjedt el?
Ha már a mikrolépésnél tartunk nekem ugye van egy 3D nyomtatóm 1/16 lépésre beállítva.
Ahogy nézem a nyomtatást a sorok nem egymás fölé kerülnek hanem kisebb mint +- 0,1mm hiba van bennük de nem lépésvesztés miatt, gondolom azért mert a motor a rá ható nyomatékok miatt nem pont oda áll be ahová az áramok aránya megadná.
Tulajdonképpen a mikrolépés a lassító áttétel kiváltása miatt terjedt el?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 november 05, 20:11
Írta: 000000000 Dátum 2015 november 05, 20:11
Kellemesen csalódtam a válaszokban, a HE-n is feltettem ezt a kérdést de ottan azt írták hogy ilyen nincs is biztos jól megnéztem-e. Mivel nem hallottam még ilyenről mikor nézegettem nekem is soká esett le sok ellenállás induktivitás méréssel hogy mi is ez és utána kerestem rá a google-n.
Nem hobbi gép de az enkóder az nincs benne, ha téveszt esetleg valami oknál fogva akkor bizony belevág a panelba.
Nem hobbi gép de az enkóder az nincs benne, ha téveszt esetleg valami oknál fogva akkor bizony belevág a panelba.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2015 november 07, 18:06
Írta: svejk Dátum 2015 november 07, 18:06
Ma kezem ügyében volt egy MSD-90-8,2 vezérlő és egy hozzá passzoló 34SM155-059-SW.... 5,8A / 4,35V / 12Nm-es léptetőmotor.
Nosza gyorsan össze is kötöztem asztalon csak úgy üresben.
- A motor paralel bipolárisba volt kötve.
- A tápegység egy 800VA-es 65V-os névleges feszültségű toroid volt 30000 uF-al megfejelve.(eredeti helyén 4 ilyen tengelyt szolgál ki)
A gyakorlatban a tápfeszültség 79V DC volt.
- A vezérlő alaphelyzetben 5,5A-ra és 4000 step/fordulatra volt junmperelve a SW4 jumper off állában azaz pihentető árammódban.
A fenti beállításban a 79V-os DC tápfeszültségből nyugalmi helyzetben 0,18A-t vett fel a vezérlő, az SW4-et pihentetés nélküli ON állásba kapcsolva 0,48A-t.
A hajtásnak step jelet adtam, ekkor üresjáratban 300 1/min fordulatszámnál a a tápegységből az áramfelvétel 0,57A-re nőtt.
Következtek a terhelt mérések:
300 1/min fordulatszámnál lépésvesztésig leterhelve a motort a max. áramfelvétel 2A volt.
A fordulatszámot 60 1/min-re csökkentve a lépésveszésig való terhelésnél 1A.
Kipróbáltam féllépéses (400 step/ford) üzemmódban is.
Csak egy régi noti volt kéznél de a kisebb step frekvencia miatt itt már feljebb tudtam menni a fordulatszámmal.
1000 1/min fordulatszámnál a lépésvesztésig való terhelés határán az áramfelvétel 2,3 A volt.
Ugyanebben a féllépésesben 60 1/min fordulatszámnál az előzőleg mért 1A áramfelvétel tartozott a lépésvesztéses terhelésig.
Látható, hogy az 1000 ford/perces motorfordulat és teljes leterheltség mellett is csupán ~180W ezen nem kicsi 12Nm-es hajtás teljesítményigénye a tápegységből.
(megjegyzem az 1000-es motorfordulat már a nem túl biztonságos tartománya a léptetőmotoroknak, csak különös óvatossággal illik e köré vagy netán fölé menni))
A fentiekkel bizonyítottam a #4817-ben leírtakat.
És egyben rávilágítottam a kísérletekkel is, hogy teljesen feleslegesen használják a hobbisták a közel 1 kVA-es tápokat a mai korszerű léptetőmotorvezérlőkhöz.
Nosza gyorsan össze is kötöztem asztalon csak úgy üresben.
- A motor paralel bipolárisba volt kötve.
- A tápegység egy 800VA-es 65V-os névleges feszültségű toroid volt 30000 uF-al megfejelve.(eredeti helyén 4 ilyen tengelyt szolgál ki)
A gyakorlatban a tápfeszültség 79V DC volt.
- A vezérlő alaphelyzetben 5,5A-ra és 4000 step/fordulatra volt junmperelve a SW4 jumper off állában azaz pihentető árammódban.
A fenti beállításban a 79V-os DC tápfeszültségből nyugalmi helyzetben 0,18A-t vett fel a vezérlő, az SW4-et pihentetés nélküli ON állásba kapcsolva 0,48A-t.
A hajtásnak step jelet adtam, ekkor üresjáratban 300 1/min fordulatszámnál a a tápegységből az áramfelvétel 0,57A-re nőtt.
Következtek a terhelt mérések:
300 1/min fordulatszámnál lépésvesztésig leterhelve a motort a max. áramfelvétel 2A volt.
A fordulatszámot 60 1/min-re csökkentve a lépésveszésig való terhelésnél 1A.
Kipróbáltam féllépéses (400 step/ford) üzemmódban is.
Csak egy régi noti volt kéznél de a kisebb step frekvencia miatt itt már feljebb tudtam menni a fordulatszámmal.
1000 1/min fordulatszámnál a lépésvesztésig való terhelés határán az áramfelvétel 2,3 A volt.
Ugyanebben a féllépésesben 60 1/min fordulatszámnál az előzőleg mért 1A áramfelvétel tartozott a lépésvesztéses terhelésig.
Látható, hogy az 1000 ford/perces motorfordulat és teljes leterheltség mellett is csupán ~180W ezen nem kicsi 12Nm-es hajtás teljesítményigénye a tápegységből.
(megjegyzem az 1000-es motorfordulat már a nem túl biztonságos tartománya a léptetőmotoroknak, csak különös óvatossággal illik e köré vagy netán fölé menni))
A fentiekkel bizonyítottam a #4817-ben leírtakat.
És egyben rávilágítottam a kísérletekkel is, hogy teljesen feleslegesen használják a hobbisták a közel 1 kVA-es tápokat a mai korszerű léptetőmotorvezérlőkhöz.
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2015 november 07, 21:47
Írta: KBalázs Dátum 2015 november 07, 21:47
Köszi hogy szakítottál időt a kísérletre! Meg hogy meg is osztottad azt velünk. [#worship]
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2015 november 08, 17:34
Írta: Szalai György Dátum 2015 november 08, 17:34
Ki használ 1kVA körüli tápegységet? Én 2kVA-est használok, ha az van kéznél.
Na de komolyan. Te is ezzel a nagy döggel próbáltad.
Nem is tudtad felvetetni a motorral a vezérlőn bejumpolt 5,5A áramhoz közeli értéket, a lépésvesztést megelőző állapotban sem?
Látszik akkor, hogy kisebb trafó is elég, de azért a nagyobb megnyugtatóbb, jó sok kondival.
Több motorhoz egyetlen táp esetében is változik a helyzet. Van hogy egyszerre szaladnak, van hogy egyik táplálja a másikat.
Na de komolyan. Te is ezzel a nagy döggel próbáltad.
Nem is tudtad felvetetni a motorral a vezérlőn bejumpolt 5,5A áramhoz közeli értéket, a lépésvesztést megelőző állapotban sem?
Látszik akkor, hogy kisebb trafó is elég, de azért a nagyobb megnyugtatóbb, jó sok kondival.
Több motorhoz egyetlen táp esetében is változik a helyzet. Van hogy egyszerre szaladnak, van hogy egyik táplálja a másikat.
Cím: Re:Léptetőmotor
Írta: r5y7cufaj Dátum 2015 november 20, 17:31
Írta: r5y7cufaj Dátum 2015 november 20, 17:31
Sziasztok!
Az egyik léptetőmotorom az egyik irányba többet lép mint a másik irányba. Mi lehet a gond? A mechanikán nem "érzem" , hogy szorulna...
Az egyik léptetőmotorom az egyik irányba többet lép mint a másik irányba. Mi lehet a gond? A mechanikán nem "érzem" , hogy szorulna...
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2015 november 24, 22:29
Írta: s7manbs8 Dátum 2015 november 24, 22:29
Tudjátok mit ? Csöves léptetőmotor vezérlőt kéne építeni. :) EL34-ből vagy akármi, ami van. :)
Cím: Re:Léptetőmotor
Írta: mex Dátum 2015 november 24, 23:30
Írta: mex Dátum 2015 november 24, 23:30
Inkább pihenj le.[#vigyor3]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 november 24, 23:40
Írta: 000000000 Dátum 2015 november 24, 23:40
Igen milyen jó is lenne az mikor bekapcsolod a gépet és arra vársz, hogy a csövek végre elérjék az üzemi hőmérsékletüket. :)
Viszont egy 5 tengelyes vezérlőnél a 40 darab cső simám kifűtené a műhelyedet is :D
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2015 november 25, 00:06
Írta: s7manbs8 Dátum 2015 november 25, 00:06
A vezeték is aranyból lenne, mert úgy audiofilebb. :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 november 25, 00:22
Írta: 000000000 Dátum 2015 november 25, 00:22
Az arany elég xar vezető, (van jobb is) de nagyon jó bevonatként mert nem oxidálódik,
Tehát ez csak audiofil agyamentség, hogy magának a vezetéknek is ebből kell lenni.
(inkább ezüstöt ajánlanám)
Néhány fém fajlagos vezetőképessége:(Am/Vmm2)
ezüst 63
réz 56
arany 45
alumínium 37
vas 10
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2015 november 25, 00:51
Írta: s7manbs8 Dátum 2015 november 25, 00:51
Jó, akkor legyen szupravezető. :)
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2015 november 25, 08:51
Írta: Szalai György Dátum 2015 november 25, 08:51
Megoldás: Félvezető alapú mini áramkörök, légszereléssel, pici mozgó alkatrészekkel kiegészítve és adócső burkolatba zárva, belső Led disz világítással. Néha gőz is csapjon fel belőlük.
Korszerű, látványos, divatos, még senki nem készíti, eladható.
Az audiófülű nem feltétlenül ért az elektronikához, de van sok pénze. Veszi, ami jól néz ki, jó a hangja és drága.
Tőle fából is lehetne a villanydrót, de csak egzotikusból természetesen.
Korszerű, látványos, divatos, még senki nem készíti, eladható.
Az audiófülű nem feltétlenül ért az elektronikához, de van sok pénze. Veszi, ami jól néz ki, jó a hangja és drága.
Tőle fából is lehetne a villanydrót, de csak egzotikusból természetesen.
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2015 november 25, 09:25
Írta: KBalázs Dátum 2015 november 25, 09:25
[#eljen]
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2015 november 25, 09:34
Írta: Motoros Dátum 2015 november 25, 09:34
Fontos: Minden egységet el kell csatolni a föld káros tömegétől. Megoldható pl. mágneses lebegtetéssel (2 drb neodium mágnes tengelyesen megvezetve ébenfa foglalatba) --minden egység alá 3 vagy 4 darab.
Így nem hallod meg ha a villamos 4 háztömbel odébb kanyarodik.
Hangszóróvezetékeket, csöveket lehűteni -273 fok közelébe, ez rendezi az atomszerkezetet.
A trafókat ezüsthuzallal tekerni, a fali aljzat sem mindegy milyen, de a kriogenizálást se hanyagold el.
Ha mindent betartasz akkor azt is hallod, hogy a karmester suhint a pálcájával
A mester
És lehet hogy ez az egész igaz és akkor az R=U/I viszont felejthető.
Így nem hallod meg ha a villamos 4 háztömbel odébb kanyarodik.
Hangszóróvezetékeket, csöveket lehűteni -273 fok közelébe, ez rendezi az atomszerkezetet.
A trafókat ezüsthuzallal tekerni, a fali aljzat sem mindegy milyen, de a kriogenizálást se hanyagold el.
Ha mindent betartasz akkor azt is hallod, hogy a karmester suhint a pálcájával
A mester
És lehet hogy ez az egész igaz és akkor az R=U/I viszont felejthető.
Cím: Re:Léptetőmotor
Írta: designr Dátum 2015 november 25, 12:31
Írta: designr Dátum 2015 november 25, 12:31
Nagyon fontos még hogy az egyfázisú audiofil berendezéseknél nem mindegy a dugvilla helyzete..egyik irányban szebben szól.A referencia cd-t pedig pár órára mélyhűtőbe..-20 celziuszra hűteni..állítólag selymesebb hangja lessz::))
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2015 november 25, 12:36
Írta: KBalázs Dátum 2015 november 25, 12:36
A CD "kezelés" hatásra van tudományos magyarázat (-om).
Nekem volt olyan írott lemezem, (amikor még volt CD lejátszóm) amirôl a vége felé egyre zajosabb lett a felvétel. Nyilván ahogy öregedett a lemez, és próbáltak a pit-ek eltünedezni, a nagyszerû kódolásnak/hibajavításnak hála, a hiányos adatot feltöltötte zajjal a CD lejátszó agya. Rendesen fehérzaj volt a csendesebb részeken.
Nekem volt olyan írott lemezem, (amikor még volt CD lejátszóm) amirôl a vége felé egyre zajosabb lett a felvétel. Nyilván ahogy öregedett a lemez, és próbáltak a pit-ek eltünedezni, a nagyszerû kódolásnak/hibajavításnak hála, a hiányos adatot feltöltötte zajjal a CD lejátszó agya. Rendesen fehérzaj volt a csendesebb részeken.
Cím: Re:Léptetőmotor
Írta: designr Dátum 2015 november 25, 12:51
Írta: designr Dátum 2015 november 25, 12:51
Én ezzel úgy vagyok..mint minap mikor faanyagot vettem,és a fakereskedés tulaját kérdeztem a faanyag gombamentesítéséről..érdemes-e,az a kis vegyszer 20-30 évig véd-e valamit?
Na ő mondta :persze ha hiszel benne használ::))
Na ő mondta :persze ha hiszel benne használ::))
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2015 november 25, 13:18
Írta: KBalázs Dátum 2015 november 25, 13:18
Jah, nem azt mondtam hogy én csinálnék ilyent lemezzel, (vagy hogy adnék egy garast is egy ilyen misztifikált szettér :) hanem hogy lehet/van hatása a hangra, kivételesen.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2015 december 02, 17:37
Írta: ANTAL GÁBOR Dátum 2015 december 02, 17:37
Szeretnék egy DM556-D birtokost megkérdezni : Mekkora az alkalmazott zöld csati mérete ?
( a lábtávolság érdekel ) A régi vezérlőknél 5 mm vagy 5.08 mm az osztás az újabb digitális drivereknél kisebb . ( különösen igaz ez az RS 232 es csatit tartalmazó vezérlőknél )
( a lábtávolság érdekel ) A régi vezérlőknél 5 mm vagy 5.08 mm az osztás az újabb digitális drivereknél kisebb . ( különösen igaz ez az RS 232 es csatit tartalmazó vezérlőknél )
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 december 03, 16:15
Írta: istvan58 Dátum 2015 december 03, 16:15
3.81mm
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2015 december 03, 16:15
Írta: istvan58 Dátum 2015 december 03, 16:15
0.254x15
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2015 december 03, 16:38
Írta: ANTAL GÁBOR Dátum 2015 december 03, 16:38
Bíztam benne hogy maradt a régi 5.08. A fiatalok nem is tudják hogy régen mekkora keresztmetszeteket alkalmaztak pl 5 amper átvezetésére. Ahogy múlik az idő minden satnyul ( "más nemzedék nő fel mely ésszel hódit s nem testi erővel" ) .Csináltam egy laboreszközt és pár napja jelezték hogy gond van vele . Hát a csati hibásodott meg . 4,2 amper ra volt programozva a vezérlő ... A volt munkahelyemen rendszeresen darálnak kábelt . A minap egy autóipari beszállító ( autó ) kábele került a kezembe . Hát nem a zsigulis korszakból való ....
Cím: Re:Léptetőmotor
Írta: 5fgy7npup Dátum 2015 december 11, 16:13
Írta: 5fgy7npup Dátum 2015 december 11, 16:13
Sziasztok! Olyan kérdésem lenne h egy Arduino Megav 2560-al tudnák egy léptető motort vezérelni? vagy pedig ahhoz h tudjam vezérelni vennem kell még valamit hozzá
Cím: Re:Léptetőmotor
Írta: gg58bmmp2 Dátum 2015 december 11, 18:07
Írta: gg58bmmp2 Dátum 2015 december 11, 18:07
Venni kell még "valamit" hozzá.
Mondjuk egy léptetőmotor meghajtó áramkört, vagy minimum 2 H hidat tartalmazó áramkört.
Mondjuk egy léptetőmotor meghajtó áramkört, vagy minimum 2 H hidat tartalmazó áramkört.
Cím: Re:Léptetőmotor
Írta: 0bn8uxmw Dátum 2015 december 11, 18:58
Írta: 0bn8uxmw Dátum 2015 december 11, 18:58
Igen kell hozzá léptető vezérlő, amit a 3D nyomtatóknál használunk bipoláris motorokhoz 24V és 2A-ig jók ezek az A4988 és DRV8825 néven futnak (ez most van az adok veszek-ben is éppen 1200 Ft/db áron, Kínából 2500 Ft az 5db).
De bármilyen vezérlő jó neki ami tud step/dir-t.
De bármilyen vezérlő jó neki ami tud step/dir-t.
Cím: Re:Léptetőmotor
Írta: kisssandor Dátum 2015 december 16, 11:33
Írta: kisssandor Dátum 2015 december 16, 11:33
Sziasztok! Használ valaki 5 fázisú léptetőmotort?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2015 december 16, 11:55
Írta: svejk Dátum 2015 december 16, 11:55
Nálam nincs rendszerben, de többféle megfordult már a kezeim közt.
Az iparban elterjedt volt.
Az iparban elterjedt volt.
Cím: Re:Léptetőmotor
Írta: vvvsmkgjx Dátum 2015 december 24, 15:05
Írta: vvvsmkgjx Dátum 2015 december 24, 15:05
Sziasztok! Következő dolgot próbálom megfogalmazni. A jelenség egy BF20-as optimum marógépnél jelentkezett. Gyári cnc kit hozzá. A vezérlőprogram elszállít így újra fel kellett telepíteni így a léptető beállítások is elvesztek. Megpróbáltam beállítani de valami nem 100-as. A golyósorsót kióráztam egy körülfordulás 2,5 mm. Tehát a menetemelkedés megvan. A léptető 1,8-as a szokásos osztású így ugyebár 200 lépés egy fordulat. Ezeket a program megfelelő helyeire beírva maradva az egész lépésnél lényeg eltérés az elméleti és az elkészült darabtól. Egy egyszerű feladat volt a teszt. Egy adott átmérőjű kör marása. Áttérve féllépésre azaz 400 lépés/fordulat már közelítenek a méretek de nem jó továbbra sem. Ami érdekes, hogy 500 lépés az ami a legközelebbi méretet adja a programozotthoz képest. Ami továbbra is érdekes hogy X-ben és Y-ban mérve az átmérőt más-más értéket kapok ami az átmérő változásával is más és más eltérés. Nagyobb átmérőnél nagyobb eltérés, kisebb átmérőnél pedig arányosan kisebb. Pl: egy D30-nál X-ben mértem 29.5-öt míg Y-ban 29-et. Tehát nincs olyan állandó érték amivel esetleg módosítva a motor paramétereit kijavíthatnám a hibát. Másik érdekesség, hogy az a bizonyos kör sem kör valójában, ugyanis 45fokban rámérve az átmérőjére lényegesen nagyobb eltérést tapasztalta. Maradva a D30-as körömnél ezaz érték 30.4 körül mozog. Tehát a méret sem stimmel illetve a kör sem kör. Találkozott már valaki hasonló jelenséggel? Próbáltam órázni az X és Y tengelyt, hogy adott útra annyit megy-e amennyit kell neki. Kisebb eltérést tapasztaltam és folyton rendszertelenül lépett rosszul. Tehát valami lépéstévesztés van még a dologban csak nem tudok rájönni mi okozza. Talán nem elég a feszültség? 5V-os motorok vannak rajta.
Cím: Re:Léptetőmotor
Írta: 2f428kduf Dátum 2015 december 24, 15:42
Írta: 2f428kduf Dátum 2015 december 24, 15:42
Nem collos az az orsó:25.4X1.2=30.48
Cím: Re:Léptetőmotor
Írta: vvvsmkgjx Dátum 2015 december 25, 14:57
Írta: vvvsmkgjx Dátum 2015 december 25, 14:57
Nem valószínűtlen, csak sajnos semmi adatom nincs róluk. Viszont az nem hiszem h megmagyarázza hogy más eltérést tapasztaltam az X és az Y méretek között. Azt pedig végképp nem hogy az egyik colos a másik meg metrikus.
Cím: Re:Léptetőmotor
Írta: 9hpa53xy Dátum 2015 december 25, 17:11
Írta: 9hpa53xy Dátum 2015 december 25, 17:11
Sziasztok!
Lenne egy kérdésem léptetőmotor vezérlő beállítással kapcsolatban. Jelenleg LIN Engineering 4118M-01RO motorokat használok, amik a következő adatokkal rendelkeznek:
Rated Current 1,70A /Phase
Resistance 1,5Ohm /Phase
Kis számolgatás után azt kaptam hogy 1,70Amper áramhoz , 1,5Ohm ellenállás esetén 2,55V feszültség tartozik.
Ezeket a remek motorokat TB6600 IC-vel felépített vezérlővel szeretném hajtani, ami chopper módban hajtja a motorokat.
A kérdésem a következő: mekkora áramkorlátot állítsak be ebben az esetben? A rendszerem feszültsége 48V lenne.
A motor adatlapja ITT
Előre is köszönöm!
Lenne egy kérdésem léptetőmotor vezérlő beállítással kapcsolatban. Jelenleg LIN Engineering 4118M-01RO motorokat használok, amik a következő adatokkal rendelkeznek:
Rated Current 1,70A /Phase
Resistance 1,5Ohm /Phase
Kis számolgatás után azt kaptam hogy 1,70Amper áramhoz , 1,5Ohm ellenállás esetén 2,55V feszültség tartozik.
Ezeket a remek motorokat TB6600 IC-vel felépített vezérlővel szeretném hajtani, ami chopper módban hajtja a motorokat.
A kérdésem a következő: mekkora áramkorlátot állítsak be ebben az esetben? A rendszerem feszültsége 48V lenne.
A motor adatlapja ITT
Előre is köszönöm!
Cím: Re:Léptetőmotor
Írta: sanyi84 Dátum 2015 december 25, 17:23
Írta: sanyi84 Dátum 2015 december 25, 17:23
1.7 A állíts be (nem tisztázott milyen a vezérlőd, van pár verzió, van dip kapcsolósba és van trimmeres árambeállításúba is)
Cím: Re:Léptetőmotor
Írta: 9hpa53xy Dátum 2015 december 25, 17:24
Írta: 9hpa53xy Dátum 2015 december 25, 17:24
Még nem raktam össze, trimmeres lesz. Köszönöm!
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2015 december 30, 10:10
Írta: zozo Dátum 2015 december 30, 10:10
Alapvető dologgal nem vagyok tisztában...
A vezérlők adatait nézve, meg van adva az áramkorlát, a tápfeszültség, de hogy hány Voltos léptető motorhoz passzol, az nem szerepel.
Mondjuk van egy 2A-es 3,7V-os motorom, meg egy 2A-es 7,4V-os motorom. A vezérlő honnan tudja, milyen feszültség mellett kell a 2A-t produkálnia?
A vezérlők adatait nézve, meg van adva az áramkorlát, a tápfeszültség, de hogy hány Voltos léptető motorhoz passzol, az nem szerepel.
Mondjuk van egy 2A-es 3,7V-os motorom, meg egy 2A-es 7,4V-os motorom. A vezérlő honnan tudja, milyen feszültség mellett kell a 2A-t produkálnia?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 december 30, 10:15
Írta: 000000000 Dátum 2015 december 30, 10:15
Szinte minden léptecset feszültség tuninggal hajtunk.
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2015 december 30, 10:26
Írta: zozo Dátum 2015 december 30, 10:26
Kérhetlek, hogy kicsit bővebben?
Értsem, hogy a feszültség a léptetés pillanatában felszalad olyan értékre, amíg a példaként említett 2A-t el nem éri?
Értsem, hogy a feszültség a léptetés pillanatában felszalad olyan értékre, amíg a példaként említett 2A-t el nem éri?
Cím: Re:Léptetőmotor
Írta: keri Dátum 2015 december 30, 10:47
Írta: keri Dátum 2015 december 30, 10:47
A léptető motorokat áramgenerátorral hajtjuk meg.
Ugyanis a motor nyomatékát és termikus terhelését a tekercseiben folyó áram határozza meg. Feszültség nem érdekes mert bármekkora feszültséget (a szigetelések átütési feszültségéig) rá lehet kapcsolni, amíg az áram nem haladja meg a névlegeset.
Tehát ha egy motoron azt olvasod hogy 2A 3V akkor az azt jelenti, hogy 2A-el melegíthető folyamatosan, és ekkor egyenáramú ellenállásából (réz ellenállása) adódóan 3V fog esni rajta.
Viszont a léptető motorokat nem álló helyzetben használjuk. Váltakozó áramú szempontból pedig az induktív ellenállás a meghatározó.
Vagyis minél nagyobb a fordulatszám, annál nagyobb feszültség kell ugyan ahhoz a 2A tekercsáramhoz.
Tehát ezért mindegy mekkora feszültséget használsz (általában 80-100V a zománchuzal szigetelés névleges határértéke) mert az áramot kell korlátozni. A feszültség csak azt határozza meg hogy milyen magas fordulatszámot fog tudni a motor.
Régen amikor még nem áram generátorral hajtották, akkor meg volt adva hogy 12V-os a motor, azaz 12V-ról közvetlenül hajtották, és a nagy belső ellenállás korlátozta az áramot, de ez egy elavult rossz hatékonyságú üzemmód.
Ugyanis a motor nyomatékát és termikus terhelését a tekercseiben folyó áram határozza meg. Feszültség nem érdekes mert bármekkora feszültséget (a szigetelések átütési feszültségéig) rá lehet kapcsolni, amíg az áram nem haladja meg a névlegeset.
Tehát ha egy motoron azt olvasod hogy 2A 3V akkor az azt jelenti, hogy 2A-el melegíthető folyamatosan, és ekkor egyenáramú ellenállásából (réz ellenállása) adódóan 3V fog esni rajta.
Viszont a léptető motorokat nem álló helyzetben használjuk. Váltakozó áramú szempontból pedig az induktív ellenállás a meghatározó.
Vagyis minél nagyobb a fordulatszám, annál nagyobb feszültség kell ugyan ahhoz a 2A tekercsáramhoz.
Tehát ezért mindegy mekkora feszültséget használsz (általában 80-100V a zománchuzal szigetelés névleges határértéke) mert az áramot kell korlátozni. A feszültség csak azt határozza meg hogy milyen magas fordulatszámot fog tudni a motor.
Régen amikor még nem áram generátorral hajtották, akkor meg volt adva hogy 12V-os a motor, azaz 12V-ról közvetlenül hajtották, és a nagy belső ellenállás korlátozta az áramot, de ez egy elavult rossz hatékonyságú üzemmód.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2015 december 30, 10:47
Írta: keri Dátum 2015 december 30, 10:47
Röviden igen.
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2015 december 30, 11:34
Írta: zozo Dátum 2015 december 30, 11:34
Köszönöm mindkettőtöknek, így már teljesen világos.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2015 december 30, 11:46
Írta: 000000000 Dátum 2015 december 30, 11:46
Valaki el tudná magyarázni hogy működik egy AC szervó motor, hogy forog is meg egyszerre pozícionál is, mi ez egy 3 fázisú asszinkron motor, van benne mágnes?
Cím: Re:Léptetőmotor
Írta: 0bn8uxmw Dátum 2015 december 30, 11:49
Írta: 0bn8uxmw Dátum 2015 december 30, 11:49
A TB6600-as IC 24V volt felett elég érdekes dolgokat tud a kínai nyákokban (leginkább füstöt jó eséllyel).
Ökölszabályként elmondható, hogy Nema17-es motornak 12V-24V, Nema23-asnak 36-48V között érdemes adni, de a motor adatlapja a mérvadó ha van rajta.
A bevett számítás szerint a 32-szer az induktivitás gyöke a max motor feszültség.
Tehát ha van egy 1.6mH(millihenry)-s motorod akkor 32X gyök1.6= 40.477V
Ökölszabályként elmondható, hogy Nema17-es motornak 12V-24V, Nema23-asnak 36-48V között érdemes adni, de a motor adatlapja a mérvadó ha van rajta.
A bevett számítás szerint a 32-szer az induktivitás gyöke a max motor feszültség.
Tehát ha van egy 1.6mH(millihenry)-s motorod akkor 32X gyök1.6= 40.477V
Cím: Re:Léptetőmotor
Írta: keri Dátum 2015 december 30, 12:11
Írta: keri Dátum 2015 december 30, 12:11
Három fázisú szinkron motor. Alapvető működés olyan mint a léptetőnek, csak a pozícionálást végzi máshogy.
Amitől szervó lesz az az enkóder és az ebből visszacsatolt motorvezérlés.
Azaz az enkóder alapján tudja hol áll a motor. Amikor ettől a pozíciótól eltérő pozíció parancsot kap, akkor addig tekeri a motort a jó irányba amíg el nem éri.
Persze itt a pozíció megközelítésre és pozíción tartásra használnak egy komplex PID algoritmust, ami lehetővé teszi, hogy a lehető leg gyorsabban és pontosabban álljon be, és ott is tartsa az esetleges változó külső behatások ellenére.
Amitől szervó lesz az az enkóder és az ebből visszacsatolt motorvezérlés.
Azaz az enkóder alapján tudja hol áll a motor. Amikor ettől a pozíciótól eltérő pozíció parancsot kap, akkor addig tekeri a motort a jó irányba amíg el nem éri.
Persze itt a pozíció megközelítésre és pozíción tartásra használnak egy komplex PID algoritmust, ami lehetővé teszi, hogy a lehető leg gyorsabban és pontosabban álljon be, és ott is tartsa az esetleges változó külső behatások ellenére.
Cím: Re:Léptetőmotor
Írta: 9hpa53xy Dátum 2016 január 05, 11:24
Írta: 9hpa53xy Dátum 2016 január 05, 11:24
Köszi az infót!
Cím: Re:Léptetőmotor
Írta: 5yfyyj67 Dátum 2016 január 12, 14:07
Írta: 5yfyyj67 Dátum 2016 január 12, 14:07
Sziasztok,
Egy kis segítséget szeretnék kérni a DRV8825 vezérlő működésében jártas szakiktól.
Az érdekelne, hogy egy lézer vezérlőről aminek a motorvezérlő felé PUL/DIR/+5V kimenetek mennek, vezérelhető-e ez a meghajtó?
És ha igen, milyen bekötéssel?
A lézervezérlő egy AWC708C.
Köszi!
Egy kis segítséget szeretnék kérni a DRV8825 vezérlő működésében jártas szakiktól.
Az érdekelne, hogy egy lézer vezérlőről aminek a motorvezérlő felé PUL/DIR/+5V kimenetek mennek, vezérelhető-e ez a meghajtó?
És ha igen, milyen bekötéssel?
A lézervezérlő egy AWC708C.
Köszi!
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2016 január 12, 14:24
Írta: s7manbs8 Dátum 2016 január 12, 14:24
Igen.
Cím: Re:Léptetőmotor
Írta: u6p5jr23k Dátum 2016 január 12, 15:00
Írta: u6p5jr23k Dátum 2016 január 12, 15:00
Nállam is felszállt a füst 40V után...
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2016 január 12, 17:33
Írta: s7manbs8 Dátum 2016 január 12, 17:33
Ez a 40V felett elszállás mitől van ? Kicsi benne a pufferkondi vagy egyéb oka van ?
Cím: Re:Léptetőmotor
Írta: 0bn8uxmw Dátum 2016 január 12, 17:46
Írta: 0bn8uxmw Dátum 2016 január 12, 17:46
Minden alúl van méretezve benne vagy a nagyon gagyi minőség, TB IC javasolt áramköri felhasználásnak doksiját még véletlenül sem követték. 40V-nál leginkább az a baj, hogy amikor fékezné a motort megállásnál simán nem bírja a pufferkondi és az ellenállás és bevezeti a fölösleget a meghajtóba abból meg kiszalad a füst ijedtében. 24V környékén még megoldja ezt a feladatot de felette már bármi elszállhat.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2016 január 12, 17:49
Írta: 000000000 Dátum 2016 január 12, 17:49
sziasztok
ehez a léptető motor vezérlőhöz mit szóltok
pozitív és negatív dolgok egyaránt érdekelnek
http://www.ebay.com/itm/CNC-5-Axis-Interface-Breakout-Board-For-Stepper-Motor-Driver-CNC-Mill-MACH3-FE-/331510411979?hash=item4d2f8f72cb:g:AakAAOSwYGFUxZCc
ehez a léptető motor vezérlőhöz mit szóltok
pozitív és negatív dolgok egyaránt érdekelnek
http://www.ebay.com/itm/CNC-5-Axis-Interface-Breakout-Board-For-Stepper-Motor-Driver-CNC-Mill-MACH3-FE-/331510411979?hash=item4d2f8f72cb:g:AakAAOSwYGFUxZCc
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2016 január 12, 18:12
Írta: zozo Dátum 2016 január 12, 18:12
Hibátlanul dolgozik nálam, de ez leválasztó kártya, tehát a vezérlőt ezzel hajtod meg.
Ha optós csatolója van a motor vezérlőnek, akkor nincs rá szükséged.
Ha optós csatolója van a motor vezérlőnek, akkor nincs rá szükséged.
Cím: Re:Léptetőmotor
Írta: 0bn8uxmw Dátum 2016 január 12, 18:18
Írta: 0bn8uxmw Dátum 2016 január 12, 18:18
Ez egy optikai leválasztó kártya a PC és motorvezérlők és egyebek közzé. Az USB ne tévesszen meg csak tápot ad neki, a csomagban nincs hozzá LPT kábel csak USB!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2016 január 12, 18:31
Írta: 000000000 Dátum 2016 január 12, 18:31
azt tudom hogy még kellenek hozzá ezek és erre jönnek rá a motorok
http://www.cncpart.hu/custom/cncpart/image/cache/w900h500wt1/product/elektronika/m545d_1.jpg?lastmod=1451848303.1432209017
(ha jól tudom )
csak arra voltam kíváncsi hogy ez az optikai leválasztó kártya megbízható e
http://www.cncpart.hu/custom/cncpart/image/cache/w900h500wt1/product/elektronika/m545d_1.jpg?lastmod=1451848303.1432209017
(ha jól tudom )
csak arra voltam kíváncsi hogy ez az optikai leválasztó kártya megbízható e
Cím: Re:Léptetőmotor
Írta: u6p5jr23k Dátum 2016 január 12, 19:19
Írta: u6p5jr23k Dátum 2016 január 12, 19:19
Amit átküldtem a másvilágra, abban 3A-es diódák voltak a motor kimeneten...
Cím: Re:Léptetőmotor
Írta: u6p5jr23k Dátum 2016 január 12, 19:23
Írta: u6p5jr23k Dátum 2016 január 12, 19:23
Hasonló van nekem is. HY JK02 talán. Az volt benne az érdekes, hogy amíg usb-ről tápoltam, addig sokszor hülyeséget csinált. Külső tápról ez megszünt. Bár lehet, hogy a p3 laptop usb portja nem bírta már a hatalmas terhelést.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2016 január 12, 19:27
Írta: 000000000 Dátum 2016 január 12, 19:27
és szerintetek melyik a jobb ?
Cím: Re:Léptetőmotor
Írta: 0bn8uxmw Dátum 2016 január 12, 21:57
Írta: 0bn8uxmw Dátum 2016 január 12, 21:57
Az a jobb amin jobb optocsatolók vannak és nem riadnak meg a 100khz-es frekvenciától sem. De ez akkor derül ki ha megkapod és kipróbálod.
Nekem ez a fajta probléma nélkül ment eddig:
CNC 5 Axis Breakout Board
Sajna olcsóbban nem találtam gyorsan, amit linkeltél azzal van most tele az ebay.
Nekem ez a fajta probléma nélkül ment eddig:
CNC 5 Axis Breakout Board
Sajna olcsóbban nem találtam gyorsan, amit linkeltél azzal van most tele az ebay.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2016 január 12, 21:58
Írta: s7manbs8 Dátum 2016 január 12, 21:58
Amelyik ilyen gyenge kivitel meg kell patkolni ezzel-azzal és az is használhatóbb, persze csak aki ért valamennyire a dologhoz annak talán megéri ezeket megvenni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2016 január 13, 13:59
Írta: 000000000 Dátum 2016 január 13, 13:59
Köszi szépen a segítséget
Cím: Re:Léptetőmotor
Írta: 5yfyyj67 Dátum 2016 január 13, 18:01
Írta: 5yfyyj67 Dátum 2016 január 13, 18:01
Szia,
A segítségedet szeretném kérni, vagy bárkiét. :)
Megkaptam a DRV8825, köszönet a gyors tranzakcióért Morvai Ferencnek!
Azonban nem boldogulok egyelőre, és nem szeretném ellőni sem a vezérlőt, sem a lézer controllert.
E rajz szerint kötöttem be, de a motor csak muzsikál, szó szerint, megmozdulni csak néha rángat egyet egyet. Melegszik is. Motor táp bemenetre 24V megy. 5V a vezérlőnek.
KÖszönöm!
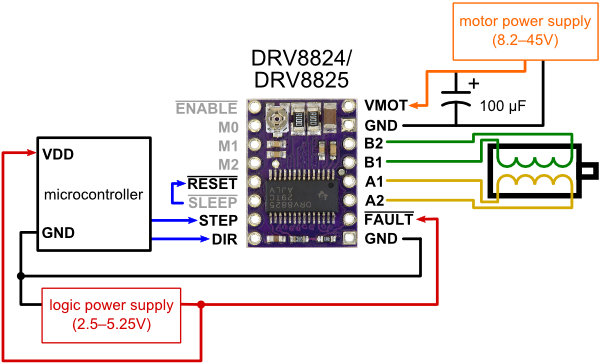
A segítségedet szeretném kérni, vagy bárkiét. :)
Megkaptam a DRV8825, köszönet a gyors tranzakcióért Morvai Ferencnek!
Azonban nem boldogulok egyelőre, és nem szeretném ellőni sem a vezérlőt, sem a lézer controllert.
E rajz szerint kötöttem be, de a motor csak muzsikál, szó szerint, megmozdulni csak néha rángat egyet egyet. Melegszik is. Motor táp bemenetre 24V megy. 5V a vezérlőnek.
KÖszönöm!
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2016 január 13, 18:35
Írta: zozo Dátum 2016 január 13, 18:35
Nincs még vele tapasztalatom, de pár nap múlva én is fel akarok egyet ilyet éleszteni.
Csak tipp, amíg nem kapsz további segítséget,
-ha a fault-tól elveszed a +5V-ot?
Nem tom, hogy Hi vagy LOW jelszint esetén aktív.
Csak tipp, amíg nem kapsz további segítséget,
-ha a fault-tól elveszed a +5V-ot?
Nem tom, hogy Hi vagy LOW jelszint esetén aktív.
Cím: Re:Léptetőmotor
Írta: 5yfyyj67 Dátum 2016 január 13, 18:49
Írta: 5yfyyj67 Dátum 2016 január 13, 18:49
Egy másik rajzon, a fault szabad és a reset/sleepre megy a +5v táp, de ugyanaz a helyzet. :(
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2016 január 13, 18:51
Írta: s7manbs8 Dátum 2016 január 13, 18:51
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2016 január 13, 18:54
Írta: s7manbs8 Dátum 2016 január 13, 18:54
Mozgatni mivel próbáltad ? A potméter milyen állásban van ? Arra vigyázzál, hogy áramtalan állapotban tekerjed csak és óvatosan, de simán közép állásban menni kellene neki, ha nem is optimálisan, melegedés az valameddig normális, a hűtőborda is elég forró szokott lenni, ha nem kap ventilátorral plusz hűtést. Itt van nekem is egy rakás A4988 panelem, majd megnézem már azokat is én is pont. A DRV8825-öt nekem csak elpukkantani sikerült eddig, bár csak egy darabom volt olyan ...
Cím: Re:Léptetőmotor
Írta: Devecz Miklós Dátum 2016 január 13, 18:55
Írta: Devecz Miklós Dátum 2016 január 13, 18:55
A motoráramot beállítottad?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2016 január 13, 18:55
Írta: s7manbs8 Dátum 2016 január 13, 18:55
A StepDIr lábak nincsenek is csatlakoztatva, vagy valamivel léptetnéd is és nem mozdul ?
Cím: Re:Léptetőmotor
Írta: 5yfyyj67 Dátum 2016 január 13, 19:14
Írta: 5yfyyj67 Dátum 2016 január 13, 19:14
huhh megszaladtak a hozzászólások:)
elektron bekötését is próbáltam ugyanaz a helyzet.
A step és dir jelet egy AWC708C-ről kapja, amihez ezt a bekötést írják a leírásban:

A motor egy 39HS02 0.6A/fázis
elektron bekötését is próbáltam ugyanaz a helyzet.
A step és dir jelet egy AWC708C-ről kapja, amihez ezt a bekötést írják a leírásban:
A motor egy 39HS02 0.6A/fázis
Cím: Re:Léptetőmotor
Írta: 5yfyyj67 Dátum 2016 január 13, 19:19
Írta: 5yfyyj67 Dátum 2016 január 13, 19:19
A motor adatlapja: 39HS02
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2016 január 13, 19:29
Írta: zozo Dátum 2016 január 13, 19:29
Huha, és hogyan kötötted rá akkor a vezérlőre?
Mert ez a negatívon vezérel, de fordítva kéne ennek a drivernek.
Mert ez a negatívon vezérel, de fordítva kéne ennek a drivernek.
Cím: Re:Léptetőmotor
Írta: 5yfyyj67 Dátum 2016 január 13, 19:53
Írta: 5yfyyj67 Dátum 2016 január 13, 19:53
Hááát
DC 5V - reset/sleep
PUL - STEP
DIR - DIR
Tapasztalatok:
- A DRV kimenetein ott a négyszögjel
- nyugalmi állapotban 0.6A folyik a tekercsen, ha ráküldök valami rajzot, akkor milliamperben sem mérhető az áram
DC 5V - reset/sleep
PUL - STEP
DIR - DIR
Tapasztalatok:
- A DRV kimenetein ott a négyszögjel
- nyugalmi állapotban 0.6A folyik a tekercsen, ha ráküldök valami rajzot, akkor milliamperben sem mérhető az áram
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2016 január 13, 20:02
Írta: zozo Dátum 2016 január 13, 20:02
Ez semmiképp nem jó, negatívot adtál a pozitív bemenetre.
Át lehet fordítani a vezérlő jelet valami IC-vel (nem emléxem rá most), de ezt majd elektron szaki elmeséli.
Át lehet fordítani a vezérlő jelet valami IC-vel (nem emléxem rá most), de ezt majd elektron szaki elmeséli.
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2016 január 13, 20:10
Írta: zozo Dátum 2016 január 13, 20:10
Jut eszembe, mivel érdemes a hűtőbordát ráragasztani az IC-re?
Muszáj vennem hővezető ragacsot, vagy van valami occo' megoldás is?
Muszáj vennem hővezető ragacsot, vagy van valami occo' megoldás is?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2016 január 13, 20:32
Írta: s7manbs8 Dátum 2016 január 13, 20:32
Na, ez eleve nem jó.
Cím: Re:Léptetőmotor
Írta: 5yfyyj67 Dátum 2016 január 13, 20:32
Írta: 5yfyyj67 Dátum 2016 január 13, 20:32
Kotorásztam a vezérlő menüjében találtam valamit amire azt gondoltam lehet megoldja, de nem:

Valid Pulse Edge: The virtual value of driver electronic level changes.
Alap helyzetben falling, de állítható rising-ra is. de úgy sem jó.
Valid Pulse Edge: The virtual value of driver electronic level changes.
Alap helyzetben falling, de állítható rising-ra is. de úgy sem jó.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2016 január 13, 20:32
Írta: s7manbs8 Dátum 2016 január 13, 20:32
Optocsatolóval lenne jó pont. az kéne közé.
Cím: Re:Léptetőmotor
Írta: 5yfyyj67 Dátum 2016 január 13, 20:34
Írta: 5yfyyj67 Dátum 2016 január 13, 20:34
Mármint mi?
A könyve szerint így kellene összekötni, mondjuk egy Leadshine DM422 vezérlővel.
SZerinted ez sem, jó vagy ez alapján a kimenete nem jó a DRV-nek?
A könyve szerint így kellene összekötni, mondjuk egy Leadshine DM422 vezérlővel.
SZerinted ez sem, jó vagy ez alapján a kimenete nem jó a DRV-nek?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2016 január 13, 20:40
Írta: s7manbs8 Dátum 2016 január 13, 20:40
Ahhoz jó, mert annak optós a bemenete, a DrV meg nem olyan, az másképp várja a jelet potenciálilag, meg lehet fázisban is pont fordított. Meg lehet oldani persze a dolgot, de kell hozzá még valami alkatrész.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2016 január 13, 20:43
Írta: s7manbs8 Dátum 2016 január 13, 20:43
Mid van a fiókban alkatrész ? Tranzisztor, 74HC14 stb. ?
Cím: Re:Léptetőmotor
Írta: 5yfyyj67 Dátum 2016 január 13, 20:44
Írta: 5yfyyj67 Dátum 2016 január 13, 20:44
Értem,
Köszi mindenkinek a segítséget!!!
Azt hiszem beruházok két DM422-re.
Még mielőtt ellövöm a lézer vezérlőt.
Köszi mindenkinek a segítséget!!!
Azt hiszem beruházok két DM422-re.
Még mielőtt ellövöm a lézer vezérlőt.
Cím: Re:Léptetőmotor
Írta: 5yfyyj67 Dátum 2016 január 13, 20:47
Írta: 5yfyyj67 Dátum 2016 január 13, 20:47
Ez a műhely egy kincses bánya, szerintem minden van :)74HC14N-et szerintem az előbb láttam....és igen van...egy zacskóval
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2016 január 13, 20:54
Írta: s7manbs8 Dátum 2016 január 13, 20:54
Azt kéne még tudni, hogy a STep jeled, alapesetben milyen állapotban van az 5V hoz képest mit mutat ? A lézer attól nem száll el hogy a motort mozgatjuk, hacsak bele nem vered az asztalba, de arra vigyázni kell, úgy nézni, hogy ne pont az asztal felett legyen egy tized mm-re.
Másik, hogy ez a mozgás vezérlő ez tápot hogy kap honnan, mert ha nem független tápról megy a DRV-hez képest, lehet más bekötést kell alkalmazni, de lehet jó úgy is, ha közös a tápja a DRV 5V, GND, végül simán egy fázist is lehet fordítani egy HC14 IC-vel pl. lehet annyi is elég neki, hogy menjen, csak párat mérni kéne lehet sima voltmérővel.
Másik, hogy ez a mozgás vezérlő ez tápot hogy kap honnan, mert ha nem független tápról megy a DRV-hez képest, lehet más bekötést kell alkalmazni, de lehet jó úgy is, ha közös a tápja a DRV 5V, GND, végül simán egy fázist is lehet fordítani egy HC14 IC-vel pl. lehet annyi is elég neki, hogy menjen, csak párat mérni kéne lehet sima voltmérővel.
Cím: Re:Léptetőmotor
Írta: 5yfyyj67 Dátum 2016 január 13, 21:10
Írta: 5yfyyj67 Dátum 2016 január 13, 21:10
Alapestben, a rajzon szereplő +5Vhoz képest 0V, a testhez képest 4,9
Arra gondoltam, hogy visszafelé ne menjen semmi olyan jel a lézer vezérlő felé ami kárt okozhat. Egyébként asztalon az egész, csak egy motor van rajta.
A mozgásvezérlő kap 24V-ot.
A DRV az 5 voltot a mozgás vezérlő +5 voltjáról kapja.ez lehet rossz?
Adjak neki teljesen külön 5 V tápot?
Arra gondoltam, hogy visszafelé ne menjen semmi olyan jel a lézer vezérlő felé ami kárt okozhat. Egyébként asztalon az egész, csak egy motor van rajta.
A mozgásvezérlő kap 24V-ot.
A DRV az 5 voltot a mozgás vezérlő +5 voltjáról kapja.ez lehet rossz?
Adjak neki teljesen külön 5 V tápot?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2016 január 13, 21:26
Írta: s7manbs8 Dátum 2016 január 13, 21:26
Az az 5V lehet csak a jelnek való, bár lehet arról is mehet.
Ha a step jel alapból magas szinten van, azt meg kell fordítani fázisban és lehet menni is fog, a Step és DIR kimeneteket a DRV Step-DIR-re kell kötni, a Step jelet meg megfordítani egy 74HC14-gyel úgy menni kéne neki.
Ha a step jel alapból magas szinten van, azt meg kell fordítani fázisban és lehet menni is fog, a Step és DIR kimeneteket a DRV Step-DIR-re kell kötni, a Step jelet meg megfordítani egy 74HC14-gyel úgy menni kéne neki.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2016 január 13, 21:28
Írta: s7manbs8 Dátum 2016 január 13, 21:28
A motor vezérlő behalása esetén rossz esetben akár mehet a vezérlőbe is vissza valami nagyobb fesz, ha nincs optó köztük. Ennek némi esélye van azért.
Cím: Re:Léptetőmotor
Írta: 5yfyyj67 Dátum 2016 január 13, 21:35
Írta: 5yfyyj67 Dátum 2016 január 13, 21:35
Kipróbáltam.
DRV külön tápról. dir a dir-rel pul a 74hcbe és onnan a stepbe és ugyanaz a helyzet. bizonyos részeknél elindul a motor de nem frankón épp megy meg cincog. :(
DRV külön tápról. dir a dir-rel pul a 74hcbe és onnan a stepbe és ugyanaz a helyzet. bizonyos részeknél elindul a motor de nem frankón épp megy meg cincog. :(
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2016 január 13, 21:47
Írta: s7manbs8 Dátum 2016 január 13, 21:47
Nem túl gyorsan gyorsítod és azért nem megy, vagy kicsi a motor áramod ?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2016 január 13, 21:50
Írta: s7manbs8 Dátum 2016 január 13, 21:50
Most a motor még nem mozgat semmit vagy hogy próbálod ? Ez a motor nem túl nagy mondjuk, magában persze mennie kéne.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2016 január 13, 21:52
Írta: s7manbs8 Dátum 2016 január 13, 21:52
A vezérlőnél az X tengely paraméterek be vannak állítva ? Ott a Max Acc értékét vedd kicsire meg a max Speedet is, úgy nézd meg elsőnek.
Cím: Re:Léptetőmotor
Írta: 5yfyyj67 Dátum 2016 január 13, 22:07
Írta: 5yfyyj67 Dátum 2016 január 13, 22:07
Holnap kipróbálom, mára elég volt. Bár amit ráengedtem rajz azon lassúra volt véve minden.
Remélem nem a vezérlő rossz.
Nincs hatvan környékén valakinek egy "rendes" motor vezérlő kipróbálás céljából?
Remélem nem a vezérlő rossz.
Nincs hatvan környékén valakinek egy "rendes" motor vezérlő kipróbálás céljából?
Cím: Re:Léptetőmotor
Írta: 5yfyyj67 Dátum 2016 január 14, 06:14
Írta: 5yfyyj67 Dátum 2016 január 14, 06:14
Semmit, van egy komplett 40W-os lézervágóm, ahhoz vettem egy új controllert, és volt egy tartalék motorom, azon próbálom életre kelteni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2016 január 14, 12:36
Írta: 000000000 Dátum 2016 január 14, 12:36
Sziasztok, érdeklődnék hogy nema34-es 12Nm léptetőmotorokhoz milyen köré épülő elektronikai egységeket(Vezérlőkártya,leválasztókártya,táp,stb..) ajánlotok amikkel stabilan működne egy cncmarógép.Vannak ugye ilyen egybe szettek, esetleg mire figyeljek, miket kerüljek?.Köszönöm a választ előre is.
Cím: Re:Léptetőmotor
Írta: svager Dátum 2016 január 14, 18:37
Írta: svager Dátum 2016 január 14, 18:37
Szia!
Szerintem a gyorsabban kapnál választ a kérdésedre,ha felvázolnád mire szeretnéd használni,mekkora munkaterűletű gépet szeretnél stb...
A 12Nm-es motor még nem garancia a "stabil" működésre és lehet,hogy fölöslegesen nagy [#wave]
Szerintem a gyorsabban kapnál választ a kérdésedre,ha felvázolnád mire szeretnéd használni,mekkora munkaterűletű gépet szeretnél stb...
A 12Nm-es motor még nem garancia a "stabil" működésre és lehet,hogy fölöslegesen nagy [#wave]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2016 január 14, 19:12
Írta: 000000000 Dátum 2016 január 14, 19:12
Köszönöm a segítséget,
a szerkezet meg tervezés alatt van,de olyan x tengelyen 500mm,y-tengelyen 450mm és z-tengelyen 400mm-t tudjon mozogni,minimum 25/5 golyósorsókkal.Az acél(c45) megmunkálás se legyen gond.nagyobb cam progikat is stabilan vigye.Előre is köszönöm szépen a válaszokat:)
a szerkezet meg tervezés alatt van,de olyan x tengelyen 500mm,y-tengelyen 450mm és z-tengelyen 400mm-t tudjon mozogni,minimum 25/5 golyósorsókkal.Az acél(c45) megmunkálás se legyen gond.nagyobb cam progikat is stabilan vigye.Előre is köszönöm szépen a válaszokat:)
Cím: Re:Léptetőmotor
Írta: svager Dátum 2016 január 14, 22:16
Írta: svager Dátum 2016 január 14, 22:16
Szerintem ez már nem a topik témája,de néhány gondolat a géppel kapcsolatban.
A 400mm Z tengelyen kicsit durva,ehhez már komoly vas kell ami tetemes súly. Ehhez vagy fékes motor kell,vagy mechanikai úton kell megakadályozni,hogy a nagy súlytól amikor a motor nincs áram alatt,lassan(vagy gyorsan)az asztalba ütközzön.
Ez az információ még nagyon kevés,hogy konkrét választ lehessen adni,(mert nem tudható mekkora sebességet szeretnél elérni a géppel)de a 12Nm-es motor és a 5mm menetemelkedésű orsó nem jó párosítás.Egy ekkora léptetőmotort max 500 al pörgethetsz mert magasabb fordulaton szinte semmi nyomatékuk nem marad,így könnyen kiszámolhatod a géped max sebességét ami igen csekély.
A 400mm Z tengelyen kicsit durva,ehhez már komoly vas kell ami tetemes súly. Ehhez vagy fékes motor kell,vagy mechanikai úton kell megakadályozni,hogy a nagy súlytól amikor a motor nincs áram alatt,lassan(vagy gyorsan)az asztalba ütközzön.
Ez az információ még nagyon kevés,hogy konkrét választ lehessen adni,(mert nem tudható mekkora sebességet szeretnél elérni a géppel)de a 12Nm-es motor és a 5mm menetemelkedésű orsó nem jó párosítás.Egy ekkora léptetőmotort max 500 al pörgethetsz mert magasabb fordulaton szinte semmi nyomatékuk nem marad,így könnyen kiszámolhatod a géped max sebességét ami igen csekély.
Cím: Re:Léptetőmotor
Írta: e3h0cv4ph Dátum 2016 január 14, 22:31
Írta: e3h0cv4ph Dátum 2016 január 14, 22:31
Szia,
A 25/5 -ös golyósorsót ajándékba kaptad vagy vetted?
Mert ekkora átmérőjű és menetemelkedésű orsót én egy 2500-as gépbe építettem be. Te méretű gépedbe fölöslegesen nagy.
A 25/5 -ös golyósorsót ajándékba kaptad vagy vetted?
Mert ekkora átmérőjű és menetemelkedésű orsót én egy 2500-as gépbe építettem be. Te méretű gépedbe fölöslegesen nagy.
Cím: Re:Léptetőmotor
Írta: 5yfyyj67 Dátum 2016 január 15, 23:26
Írta: 5yfyyj67 Dátum 2016 január 15, 23:26
Sziasztok,
A DRV8825-ket félretettem, és kipróbáltam a motort egy DM556 -al. DE nem jártam sok sikerrel. Beállítottam a ProTunerben 0.6A-t.
De alig lehet felvenni a sebességet. Ugyanez a motor az eredeti moshidraw vezérlővel gravírozáskor megy veszettül, itt meg alig.
Túrtam egy hy200-2220-270 motort ezer éves darab, full sebességre felhuzva is hibátlanul megy.
Valakinek van ötlete, mi lehet a baj? Tanácstalan vagyok!
A DRV8825-ket félretettem, és kipróbáltam a motort egy DM556 -al. DE nem jártam sok sikerrel. Beállítottam a ProTunerben 0.6A-t.
De alig lehet felvenni a sebességet. Ugyanez a motor az eredeti moshidraw vezérlővel gravírozáskor megy veszettül, itt meg alig.
Túrtam egy hy200-2220-270 motort ezer éves darab, full sebességre felhuzva is hibátlanul megy.
Valakinek van ötlete, mi lehet a baj? Tanácstalan vagyok!
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2016 január 16, 00:02
Írta: s7manbs8 Dátum 2016 január 16, 00:02
Na még mindig nem megy valami ...
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2016 január 16, 00:11
Írta: s7manbs8 Dátum 2016 január 16, 00:11
Itt ugyanannyi feszültséggel megy a hajtás, mint az eredetiben ahol megy mint a gép ?
Cím: Re:Léptetőmotor
Írta: 5yfyyj67 Dátum 2016 január 16, 08:56
Írta: 5yfyyj67 Dátum 2016 január 16, 08:56
Szia,
Hogy konkrétan a vezerlő mennyivel vezérli nem mértem. De 5v/24v betapja van.
Hogy konkrétan a vezerlő mennyivel vezérli nem mértem. De 5v/24v betapja van.
Cím: Re:Léptetőmotor
Írta: 5fgy7npup Dátum 2016 január 19, 13:28
Írta: 5fgy7npup Dátum 2016 január 19, 13:28
Sziasztok!
Van valakinek eladó léptető motor vezérlője?
Van valakinek eladó léptető motor vezérlője?
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2016 január 19, 13:41
Írta: zozo Dátum 2016 január 19, 13:41
[#nevetes1] ...valamilyen szerintem mindenkinek van.
Fejtsd ki bővebben, ha segítséget akarsz.
Fejtsd ki bővebben, ha segítséget akarsz.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2016 január 19, 18:16
Írta: s7manbs8 Dátum 2016 január 19, 18:16
Mekkorát szeretnél ?
Cím: Re:Léptetőmotor
Írta: 5yfyyj67 Dátum 2016 január 19, 21:58
Írta: 5yfyyj67 Dátum 2016 január 19, 21:58
Na sikerült belőni a vezérlőket a motorhoz, bár írtam a gyártónak, első kérdése az volt, hogy hol vettem, mert ehhez a motorhoz nem való, nem lehet jól optimalizálni a motorhoz. Hát csak sikerült. :)Három értékkel játszva:
Proportional Gain
Integral Gain
Electronic Damping Coefficient
Bár nem lehet úgy megtekerni mint a nagyobb motorjaimat.
De végre beépítve mindent a lézervágóba 300mm/sec sebességgel még hibátlanul vág, felette nem próbáltam. :)
Proportional Gain
Integral Gain
Electronic Damping Coefficient
Bár nem lehet úgy megtekerni mint a nagyobb motorjaimat.
De végre beépítve mindent a lézervágóba 300mm/sec sebességgel még hibátlanul vág, felette nem próbáltam. :)
Cím: Re:Léptetőmotor
Írta: 5fgy7npup Dátum 2016 január 27, 16:12
Írta: 5fgy7npup Dátum 2016 január 27, 16:12
Sziasztok!
A4988 vezerlőt keresek! min 5db kellene! akinek van kérem jelezze!!
A4988 vezerlőt keresek! min 5db kellene! akinek van kérem jelezze!!
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2016 január 30, 22:56
Írta: KBalázs Dátum 2016 január 30, 22:56
Elkezdtem léptetőmotorok tartónyomatékát méregetni, hogy tudjam az ismeretleneket hova sorolni (összedobtam egy mini mérôpadot) és valami egészen fura jött ki. Minden motornál, amikhez van adatlapom, pár tizednyi hibával az jön ki mint a katalógusadat (egy és két tekercset gerjesztve is). Van viszont egy kivétel, aminek hiába van 8 kivezetése, úgy néz ki hogy akárhogy kötve ugyanazt a tartónyomatékot produkálja, azaz nagyobb árammal, párhuzamos vagy soros kötésben sem erôsebb. Ezt a motorfajtát a vaskeresztmetszet korlátozza, telítôdik és ennyit tud? (egy pici Vexta)
Cím: Re:Léptetőmotor
Írta: iiidyyiy3 Dátum 2016 február 01, 13:02
Írta: iiidyyiy3 Dátum 2016 február 01, 13:02
Na ez izgalmas téma! Kicsit bővebben is bemutathatnád a mérőpadot, mérést, engem érdekel!
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 február 01, 13:15
Írta: keri Dátum 2016 február 01, 13:15
Gondolom rákapcsolja az áramot, és egy maghatározott erőkaron keresztül vagy súlyt pakol rá amíg le nem fittyed, vagy halmérleggel megnézi mekkora erővel tudja elforgatni.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 február 01, 13:16
Írta: keri Dátum 2016 február 01, 13:16
Igen, valószínű.
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2016 február 01, 17:59
Írta: KBalázs Dátum 2016 február 01, 17:59
Ahogyan keri is írja.
Egy pillepalackba vékony (a képen a mérlegre téve látszik) csövön folyatok vizet, ameddig a motorra rögzített kar (menetfúró hajtóvas) le nem "fittyen", névleges motoron átfolyó áramnál.
Készítettem egy képet, meg magyarázatot:

Egy pillepalackba vékony (a képen a mérlegre téve látszik) csövön folyatok vizet, ameddig a motorra rögzített kar (menetfúró hajtóvas) le nem "fittyen", névleges motoron átfolyó áramnál.
Készítettem egy képet, meg magyarázatot:
Cím: Re:Léptetőmotor
Írta: vjanos Dátum 2016 február 01, 18:13
Írta: vjanos Dátum 2016 február 01, 18:13
Ilyenkor csak egy tekercset kötsz be?:O
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2016 február 01, 18:17
Írta: KBalázs Dátum 2016 február 01, 18:17
Lejjebb írtam, hogy ha unipoláris akkor egyet, majd sorosan a kettôt is. Bipolárisnál ugye csak egyet, 8 kivezetésesnél mind3 variációban.
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2016 február 01, 18:36
Írta: zozo Dátum 2016 február 01, 18:36
Korábban én is játszottam ilyen nyomatékmérőset, csak én a motor tengelyét fogtam tokmányba, a házba két csavart behajtva, azon átvetettem egy méteres 5-ös karboncsövet. (súlya nulla) A pálcára húztam egy kisebb réz pogácsát,és addig húztam kifelé, amíg le nem fordult. Én mondjuk a vezérlőbe bekötve próbáltam a motort, nem jutott eszembe, hogy van labortápom is :)
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2016 február 01, 18:39
Írta: KBalázs Dátum 2016 február 01, 18:39
Ugye-ugye [#vigyor5]
Mivel egy rakás motort próbáltam, és a motorvezérlô diszkrét néhány áramerôsséget tud, és azt sem túl hitelesítetten, így inkább így mértem. Elég jól hozza a papírformát szinte az összes motor.
Mivel egy rakás motort próbáltam, és a motorvezérlô diszkrét néhány áramerôsséget tud, és azt sem túl hitelesítetten, így inkább így mértem. Elég jól hozza a papírformát szinte az összes motor.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2016 február 01, 19:14
Írta: Szalai György Dátum 2016 február 01, 19:14
Forgató nyomatékuk nem érdekelt?
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 február 01, 19:23
Írta: keri Dátum 2016 február 01, 19:23
Azt komplikáltabb mérni.... Bár nem is.
Rá kell tenni egy nehéz tárcsát és a gyorsulás inercia adatokból számolható a nyomaték is, csak a vezérlő jeleket kell megírni hozzá.
Rá kell tenni egy nehéz tárcsát és a gyorsulás inercia adatokból számolható a nyomaték is, csak a vezérlő jeleket kell megírni hozzá.
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2016 február 01, 19:26
Írta: KBalázs Dátum 2016 február 01, 19:26
Dehogynem, csakhogy azt nem tudom ennyire egyszerûen mérni. Elsô körben az érdekelt hogy milyen motorok (nagyjából) azok amikhez nincs semmi adatlapom (de nagyon hasonlóakhoz van). Itt azonnal találtam egy bizonyos motort, ami a képen az egyetlen nem szögletes Nema23 motor (van belôle néhány, egy csupasz tengelyût mértem, nem az amit fotóztam) és ugyan találtam egy beszkennelt adatlapot hozzá, de azzal nem teljesen lettem képben, mert nem következetesen viselkedik.
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2016 február 01, 23:35
Írta: B.Zoltán Dátum 2016 február 01, 23:35
Nagyon egyszerűen lehet csinálni egy primitív forgatónyomaték mérőt, ezen a linken a fiammal leírtuk, és képeket is bevágtunk, de sajnos ez most eltűnt... Ha érdekel benneteket, felrakjuk a képeket az itteni közös tárhelyre.
De szeretnék csinálni egy ilyen profi nyomatékmérőt én is:
Nyomaték mérő
De szeretnék csinálni egy ilyen profi nyomatékmérőt én is:
Nyomaték mérő
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2016 február 01, 23:44
Írta: B.Zoltán Dátum 2016 február 01, 23:44
A jó link
(valahol megduplázódott a linkben az sgforum.hu, de hogy hogyan...)
(valahol megduplázódott a linkben az sgforum.hu, de hogy hogyan...)
Cím: Re:Léptetőmotor
Írta: hostya Dátum 2016 február 01, 23:50
Írta: hostya Dátum 2016 február 01, 23:50
Ebből is látszik hogy a képfeltöltés.hu-ra feltöltött képek, -évek múltán- törlődnek.. (sajnos)
Cím: Re:Léptetőmotor
Írta: iiidyyiy3 Dátum 2016 február 02, 01:25
Írta: iiidyyiy3 Dátum 2016 február 02, 01:25
Szóval ez most "csak" tartónyomaték.
A egyes fordulatszámokhoz tartozó nyomatékgörbe lenne az igazán látványos.
A egyes fordulatszámokhoz tartozó nyomatékgörbe lenne az igazán látványos.
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2016 február 02, 04:54
Írta: KBalázs Dátum 2016 február 02, 04:54
Ez tehát (a videón) egy fék, amire fel van szerelve egy súly, és a fék erejét szabályozzák, bár szerintem itt a skálát nagyon be kell kalibrálni, nem lineáris,
és még leng is.
Nem lenne egyszerûbb, egy léptetômotort terhelésnek betenni, generátor üzemmódban? A söntölésen mért átfolyó áram arányos a szükséges nyomatékkal (az ipari precíziós mérlegek (egy része) is így mér, hogy kiegyensúlyozza a terhelést elektromágnessel, és az azon átoflyó áramot mutatja). Persze egyszer ezt is kalibrálni kell valahogy. Meg feláttételezni, hogy egyenletesebb legyen a terhelés a bevezetô tengelyen.
és még leng is.
Nem lenne egyszerûbb, egy léptetômotort terhelésnek betenni, generátor üzemmódban? A söntölésen mért átfolyó áram arányos a szükséges nyomatékkal (az ipari precíziós mérlegek (egy része) is így mér, hogy kiegyensúlyozza a terhelést elektromágnessel, és az azon átoflyó áramot mutatja). Persze egyszer ezt is kalibrálni kell valahogy. Meg feláttételezni, hogy egyenletesebb legyen a terhelés a bevezetô tengelyen.
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2016 február 02, 05:31
Írta: KBalázs Dátum 2016 február 02, 05:31
A "detent torque" mértéke milyen irányban befolyásolja a motor (gyakorlati) felhasználhatóságát?
Vannak egész nagy motorok amik tengelyét könnyen lehet kézzel elforgatni, meg harmad-akkorák amiknek jó nehéz (a nagyobbakénál is nehezebb) forgatni(tehát nem nyomaték, hanem felépítés-függő tulajdonság).
Valahol olvastam hogy ez állandó veszteség, ami a fordulat növelésével arányosan nôl.
De még inkább zavaró, ha súlyos rezonancia forrása lenne. Na letesztelem mindjárt hogy érezzem/halljam.
Vannak egész nagy motorok amik tengelyét könnyen lehet kézzel elforgatni, meg harmad-akkorák amiknek jó nehéz (a nagyobbakénál is nehezebb) forgatni(tehát nem nyomaték, hanem felépítés-függő tulajdonság).
Valahol olvastam hogy ez állandó veszteség, ami a fordulat növelésével arányosan nôl.
De még inkább zavaró, ha súlyos rezonancia forrása lenne. Na letesztelem mindjárt hogy érezzem/halljam.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2016 február 02, 15:45
Írta: svejk Dátum 2016 február 02, 15:45
Egy régi fórumtárs megkért, hogy figyelmeztesselek néhány dologra, de én inkább bemásolom szó szerint talán így a legjobb..:
"A léptetőmotor topikban légyszi figyelmeztessed már
a 4941bejegyzés íróját arra, hogy:
1. m*kg*N nem egyenlő Nm
2. 1 kg nem egyenlő 9.81 N
3. A tekercseket se minden esetben jól köti be a méréshez.
Néha még benézek ide, és ez most nagyon csípi a szememet,
hogy ennnyire alapvető szakmai dolgok se stimmelnek már ezen a Fórumon.. "
Én most nem akarom kommentálni, mert bokros teendőim miatt kissé hanyagolom a fórumot, majd át kell olvasnom az előző beírásokat.
"A léptetőmotor topikban légyszi figyelmeztessed már
a 4941bejegyzés íróját arra, hogy:
1. m*kg*N nem egyenlő Nm
2. 1 kg nem egyenlő 9.81 N
3. A tekercseket se minden esetben jól köti be a méréshez.
Néha még benézek ide, és ez most nagyon csípi a szememet,
hogy ennnyire alapvető szakmai dolgok se stimmelnek már ezen a Fórumon.. "
Én most nem akarom kommentálni, mert bokros teendőim miatt kissé hanyagolom a fórumot, majd át kell olvasnom az előző beírásokat.
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2016 február 02, 16:03
Írta: KBalázs Dátum 2016 február 02, 16:03
És a jó megoldást megtartotta magának? (F5)
Hú, kitalálom, egyetlen "régi fórumtárs" volt aki nem mondja a tutit, csak azt hogy szerinte nem jó.
Kösz a bemásolást.
Hú, kitalálom, egyetlen "régi fórumtárs" volt aki nem mondja a tutit, csak azt hogy szerinte nem jó.
Kösz a bemásolást.
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2016 február 02, 16:22
Írta: KBalázs Dátum 2016 február 02, 16:22
Külön mókásnak érzem, hogy nem annak írt akinek a bejegyzésével gondja van, hanem neked [#vigyor5] (pedig regisztráció/bejelentkezés nélkül is tudna üzenetet küldeni a fórumon át).
Persze átjött ez így is is, mûködik a cserkész-hírlánc.
Én a magam részérôl helyesnek ítélem meg a számítási és szemléltetési módot. Mivel nem oktatási céllal raktam fel a képet, hanem azért mert megkérte egy fórumtárs hogy mutassam már meg hogyan csináltam.
De amint jön jobb megoldás rá, szívesen lecserélem a képen a feliratokat.
Persze átjött ez így is is, mûködik a cserkész-hírlánc.
Én a magam részérôl helyesnek ítélem meg a számítási és szemléltetési módot. Mivel nem oktatási céllal raktam fel a képet, hanem azért mert megkérte egy fórumtárs hogy mutassam már meg hogyan csináltam.
De amint jön jobb megoldás rá, szívesen lecserélem a képen a feliratokat.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2016 február 02, 16:23
Írta: ANTAL GÁBOR Dátum 2016 február 02, 16:23
szia ! F = m*a . A Földön ( nálunk ) a nehézségi gyorsulás g= 9.81 m/s2 Tehát az az erő mit a Föld nehézségi erőterében a gravitáció a pille palackra kifejt 1 kg os tömegű testet feltételezve 1kg*9.81 m/s2 = 9.81 N
Az a baj hogy( általánosságban nem igaz hogy 1 kg egyenlő 9.81 N . Az egyik tömeg , a másik erő . Ha odaírtad volna hogy 1 kg tömegű test súlyereje ( a Földön, Európában , a tengerszint feletti magasságban ) 9.81 N akkor OK . Mert "kérem szépen" ha a kísérlet például a Holdon végezted volna akkor hibás az eredmény . [#vigyor4][#vigyor4]
Az a baj hogy( általánosságban nem igaz hogy 1 kg egyenlő 9.81 N . Az egyik tömeg , a másik erő . Ha odaírtad volna hogy 1 kg tömegű test súlyereje ( a Földön, Európában , a tengerszint feletti magasságban ) 9.81 N akkor OK . Mert "kérem szépen" ha a kísérlet például a Holdon végezted volna akkor hibás az eredmény . [#vigyor4][#vigyor4]
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2016 február 02, 16:41
Írta: svejk Dátum 2016 február 02, 16:41
Épp tegnap jártam így, megyek a komámhoz, de mondja a felesége hogy épp a holdon van forgatónyomatékot mérni pillepalackkal. :))
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2016 február 02, 16:44
Írta: KBalázs Dátum 2016 február 02, 16:44
A "vihar a biliben" jelző illik a történtekre leginkább, már láttunk ilyent.
Sajnos még nem áll módomban a Holdon elvégezni a kísérletet, de majd igyekszem.[#fejvakaras]
(Az sem sanszos hogy a holdról olvassa valaki a fórumot.)
Ha nyomsz egy F5 (frissít) gombot, akkor nálad is szebb lesz a képet (már átírtam 45 perce).
Köszönöm a fizika korrepetálást, de ez egy közelítô képlet, ami a célnak megfelel, (kivéve annak aki nem akarja érteni).
Sajnos még nem áll módomban a Holdon elvégezni a kísérletet, de majd igyekszem.[#fejvakaras]
(Az sem sanszos hogy a holdról olvassa valaki a fórumot.)
Ha nyomsz egy F5 (frissít) gombot, akkor nálad is szebb lesz a képet (már átírtam 45 perce).
Köszönöm a fizika korrepetálást, de ez egy közelítô képlet, ami a célnak megfelel, (kivéve annak aki nem akarja érteni).
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2016 február 02, 16:51
Írta: svejk Dátum 2016 február 02, 16:51
Tudod, megkértek...
ha nem írom be az a baj...
ha saját nevem alatt írom az a baj..
ha bemásolom az a baj...
Az 1. és 2. tényleg nem egyenlő, de azért én megértettem.
Hogy kellenek-e erre a fórumra komolyabb magyarázatok azt én nem tudom eldönteni.
Talán attól is függ ki hogy ébred. :)
ha nem írom be az a baj...
ha saját nevem alatt írom az a baj..
ha bemásolom az a baj...
Az 1. és 2. tényleg nem egyenlő, de azért én megértettem.
Hogy kellenek-e erre a fórumra komolyabb magyarázatok azt én nem tudom eldönteni.
Talán attól is függ ki hogy ébred. :)
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2016 február 02, 16:54
Írta: ANTAL GÁBOR Dátum 2016 február 02, 16:54
Folytatom még egy kicsit . Pl kofa a dinnyét egy egyenlő karú mérleggel méri és az egyik serpenyőbe belerakja a vas súlyokat és a másikba a dinnyét. Ha egyensúlyba kerül a mérleg akkor a súlyok tömege = a dinnye tömege . Ha a kofa a Holdon mérne akkor is igaz lenne az állítás. Az a mérleg ami a fotón van az egy elektronikus mérleg és a méréshez egy ERŐ mérő cellát használ . A mérleg kijelzi a tömeget ( kg ) de valójában erőt mér . Tehát ha a Holdon mérné a kofa a dinnyét ( az elektronikus mérleggel ) akkor igencsak pórul járna amikor a fizetésre kerülne a sor
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2016 február 02, 17:00
Írta: ANTAL GÁBOR Dátum 2016 február 02, 17:00
meg ne sértődj már ! Volt egy "kérem szépen" és egy smile .
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2016 február 02, 17:00
Írta: KBalázs Dátum 2016 február 02, 17:00
De most akkor a kofa melyik zsebében van a léptetômotor? És ki fizeti a kofának a Holdra-utat? Mert ugye ez sem mindegy!
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2016 február 02, 20:13
Írta: PSoft Dátum 2016 február 02, 20:13
A kofa, mindkét zsebében kell hogy legyen egy-egy léptetőmotor!
Különben, balanszos lesz a kofa, no meg a röppálya is,és...sosem ér a Holdra!:))
[#wave]
Cím: Re:Léptetőmotor
Írta: Etib Dátum 2016 február 04, 10:08
Írta: Etib Dátum 2016 február 04, 10:08
Sziasztok!
Bemásolom ide is az elektronikai rovat mellett.
Egy kis segítséget szeretnék kérni step motor meghajtásban. Felújítok egy motorkerékpárt és a kilóméteróra meghajtása bowdenes. Sajnos a keréknél azonban nem megvalósítható a bowden kihajtás kialakítása. Arra gondoltam mivel van ilyen csöpp DRV8825-ös meghajtóm szerzek hozzá egy picinyke step motort és egy hall jelfogóval az kerékagy körül leszedem a kerékfordulatszámot. A segítséget abban kérnék, hogy véleményetek szerint milyen közbenső kapcsolást kellene építenem hogy a leszedett impulzusok alapján meg tudjam hajtani stepmotort. Gondoskodni kell az „áttétel” beállításról is, hogy az óra azért a valóságot mutassa.
Szellemi tevékenységeteket előre is köszönöm!
Bemásolom ide is az elektronikai rovat mellett.
Egy kis segítséget szeretnék kérni step motor meghajtásban. Felújítok egy motorkerékpárt és a kilóméteróra meghajtása bowdenes. Sajnos a keréknél azonban nem megvalósítható a bowden kihajtás kialakítása. Arra gondoltam mivel van ilyen csöpp DRV8825-ös meghajtóm szerzek hozzá egy picinyke step motort és egy hall jelfogóval az kerékagy körül leszedem a kerékfordulatszámot. A segítséget abban kérnék, hogy véleményetek szerint milyen közbenső kapcsolást kellene építenem hogy a leszedett impulzusok alapján meg tudjam hajtani stepmotort. Gondoskodni kell az „áttétel” beállításról is, hogy az óra azért a valóságot mutassa.
Szellemi tevékenységeteket előre is köszönöm!
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2016 február 04, 10:24
Írta: KBalázs Dátum 2016 február 04, 10:24
Ha értesz valamennyire a programozáshoz, akkor ez nem feladat (akár egy pici arduino-nano-val is megoldható, ahhoz nem kell plusz fejlesztôeszköz).
Ha nem, akkor már neccesebb.
Kell ugye a keréktôl jövô jel feldolgozása (bizonyára felszorzása), amit TTL szinten átadsz a stepmotor vezérlônek, aminek viszont kell a 12V. Itt az is kérdés mekkora fordulat lehet maximum, és mekkora erôvel kell tekerni az óra mechanikus bemenetét. És minderre van-e hely beépíteni.
Ha nem, akkor már neccesebb.
Kell ugye a keréktôl jövô jel feldolgozása (bizonyára felszorzása), amit TTL szinten átadsz a stepmotor vezérlônek, aminek viszont kell a 12V. Itt az is kérdés mekkora fordulat lehet maximum, és mekkora erôvel kell tekerni az óra mechanikus bemenetét. És minderre van-e hely beépíteni.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 február 04, 11:11
Írta: keri Dátum 2016 február 04, 11:11
Tehát akkor mi a tanulság?
Helyesen nem pillepalackot, hanem kalibrált 1Nm-es léptető motort kell tenni az erőkar végére és annak a súlyereje alapján lesz pontos? :D
Helyesen nem pillepalackot, hanem kalibrált 1Nm-es léptető motort kell tenni az erőkar végére és annak a súlyereje alapján lesz pontos? :D
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 február 04, 11:17
Írta: keri Dátum 2016 február 04, 11:17
Mikrokontrollerbe le kell programozni.
Mérni kell egy kerék vagy főtengely fordulat idejét, az így kopott időeredménynek veszed a reciprokát, megszorzod egy állandóval amivel meghatározhatod a frekvencia függő mutató kitérés mértékét.
Ez után kiadsz annyi impulzust a megfelelő irányba hogy beálljon a mutató a kívánt értékre.
Ilyen egyszerű, én feladtam, de az is igaz hogy a mikroszteppinget is PIC-ből akartam megoldani, és a mutatók minnél realisztikusabb mozgása miatt PID algoritmust is belekevertem.
Amúgy autó bontóból szereztem műszerbe való mikroléptetőt. Nagyon primitívek. 2 lépés/ fordulatot tud, de le van áttételezve csigával és kb akkora minta DRV bélyeg önmagában.
Mérni kell egy kerék vagy főtengely fordulat idejét, az így kopott időeredménynek veszed a reciprokát, megszorzod egy állandóval amivel meghatározhatod a frekvencia függő mutató kitérés mértékét.
Ez után kiadsz annyi impulzust a megfelelő irányba hogy beálljon a mutató a kívánt értékre.
Ilyen egyszerű, én feladtam, de az is igaz hogy a mikroszteppinget is PIC-ből akartam megoldani, és a mutatók minnél realisztikusabb mozgása miatt PID algoritmust is belekevertem.
Amúgy autó bontóból szereztem műszerbe való mikroléptetőt. Nagyon primitívek. 2 lépés/ fordulatot tud, de le van áttételezve csigával és kb akkora minta DRV bélyeg önmagában.
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2016 február 04, 11:31
Írta: KBalázs Dátum 2016 február 04, 11:31
Én úgy értettem hogy egy meglévô tök-mechanikus km/h órát kell meghajtani, lehet félreértettem.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 február 04, 11:49
Írta: keri Dátum 2016 február 04, 11:49
Az is egy megoldás, bár én akkor már közvetlenül a mutatóra tenném a léptető motort, bár abban igazad van, hogy akkor a mutató mozgása természetesebb, ha a rugó és az örvényáramú kitérítésre van bízva.
Viszont akkor léptető sem kell, hanem egy 3 fázisú külső forgórészes BLDC motor állórészt kell belerakni az alu harangba és simán léptetni a fázisokat a fordulatszámmal arányosan, a mutató kitérését pedig az áramerősséggel lehet szabályozni....bár ez manapság már nagyon analóg megoldás :)
Viszont akkor léptető sem kell, hanem egy 3 fázisú külső forgórészes BLDC motor állórészt kell belerakni az alu harangba és simán léptetni a fázisokat a fordulatszámmal arányosan, a mutató kitérését pedig az áramerősséggel lehet szabályozni....bár ez manapság már nagyon analóg megoldás :)
Cím: Re:Léptetőmotor
Írta: Etib Dátum 2016 február 04, 11:50
Írta: Etib Dátum 2016 február 04, 11:50
Köszönöm az iránymutatásokat. Igen tök mechanikus a kilométeróra. Nincs más hátra megismerkedni az adruinoval. Az idő nem sürget, a mocin van még mit csinálni. Hely egyébként van, de mennyire bírja ez a kis áramköri lap az időjárási körülményeket? Vagy ki kell önteni műgyantával a végén?
Cím: Re:Léptetőmotor
Írta: 0bn8uxmw Dátum 2016 február 04, 12:11
Írta: 0bn8uxmw Dátum 2016 február 04, 12:11
Ezt találtam neked, a lényeg hogy szerezz egy kis léptető mocit valami régi műszerfalból.
My Stepper motor "Analog" speedometer project
My Stepper motor "Analog" speedometer project
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2016 február 04, 12:13
Írta: s5f8tmfv3 Dátum 2016 február 04, 12:13
Itt is van egy hasonló megoldás.
Cím: Re:Léptetőmotor
Írta: u6p5jr23k Dátum 2016 február 04, 12:43
Írta: u6p5jr23k Dátum 2016 február 04, 12:43
Szia Etib!
Ha gondolod, nekem kallódik egy kínai robogó műszeregységem. Abból neked adom a motort, ha segít.
Ha gondolod, nekem kallódik egy kínai robogó műszeregységem. Abból neked adom a motort, ha segít.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 február 04, 15:36
Írta: keri Dátum 2016 február 04, 15:36
Hát esőre ne tedd ki, de amúgy vízmentes helyen nem szokott gond lenni.
Egy saját gyártású elektronikus index áramköröm már megy vagy 15 éve gond nélkül. Kibeleztem egy rossz indexrelét, és abba peremeztem vissza, de nincs semmi extra szigetelése, csak lefújtam lakkal az egészet, hogy ne oxidálódjon a réz, meg a forrasztás.
Azonban manapság vagy kétkomponenses önthető szilikongumit használnék, vagy van alkatrész tokozó öntőgyanta. LEDlámpán próbáltam már.
Egy saját gyártású elektronikus index áramköröm már megy vagy 15 éve gond nélkül. Kibeleztem egy rossz indexrelét, és abba peremeztem vissza, de nincs semmi extra szigetelése, csak lefújtam lakkal az egészet, hogy ne oxidálódjon a réz, meg a forrasztás.
Azonban manapság vagy kétkomponenses önthető szilikongumit használnék, vagy van alkatrész tokozó öntőgyanta. LEDlámpán próbáltam már.
Cím: Re:Léptetőmotor
Írta: Etib Dátum 2016 február 04, 18:25
Írta: Etib Dátum 2016 február 04, 18:25
Köszönöm a segítségeteket és a felajánlást is.Úgy nézem két módszer lehetséges: az egyik hogy a mutatót közvetlenül a stepmotor tengelyére szereljük és azt pozízionáló motorként használjuk.(így lehet szép csapdosós mutatós órákat csinálni) Mivel a műszer is már veterán korú, én a másik módszert választanám (így az órát sem kell megbontani) amelyiknél a motor - igaz erősebb kell - az eredeti mechanikát fogja forgatni. Így már látom a fényt az alagút végén [#worship]
Cím: Re:Léptetőmotor
Írta: 5fgy7npup Dátum 2016 február 05, 03:07
Írta: 5fgy7npup Dátum 2016 február 05, 03:07
Sziasztok! Ez a program jó lenne egy léptető motor vezérléshez? Amim van hozzá: Arduino Uno R3+L298n meghajtómodul!Lényegében annyit szeretnék elérni hogy a motor forogjon körbe körbe és egy idő után váltson forgás irányt!
//defining connections to L298N
int input1 = 22;
int input2 = 23;
int input3 = 28;
int input4 = 29;
void setup()
{
pinMode(input1,OUTPUT);
pinMode(input2,OUTPUT);
pinMode(input3,OUTPUT);
pinMode(input4,OUTPUT);
}
void loop()
{
//1st step
digitalWrite(input1,HIGH);
digitalWrite(input2,LOW);
digitalWrite(input3,LOW);
digitalWrite(input4,HIGH);
delay(10); //small delay between each step of 10ms
//2nd step
digitalWrite(input1,LOW);
digitalWrite(input2,HIGH);
digitalWrite(input3,LOW);
digitalWrite(input4,HIGH);
delay(10);
//3rd step
digitalWrite(input1,LOW);
digitalWrite(input2,HIGH);
digitalWrite(input3,HIGH);
digitalWrite(input4,LOW);
delay(10);
//4th step
digitalWrite(input1,HIGH);
digitalWrite(input2,LOW);
digitalWrite(input3,HIGH);
digitalWrite(input4,LOW);
delay(10);
}
Cím: Re:Léptetőmotor
Írta: 0bn8uxmw Dátum 2016 február 05, 05:30
Írta: 0bn8uxmw Dátum 2016 február 05, 05:30
Szia,
Nem érdemes a kereket feltalálni ismét, ne szenvedj vele vannak jó kis libary-k hozzá.
Ezt olvasd el:
Easy Driver Examples
Tehát ami nálad pl kimaradt, hogy nem számolod hány lépést tettél meg eddig, persze végig léptetheted így is ahogy csináltad de elég durva és fölösleges megoldás.
És akkor olvasd el ezt L298N Dual Motor Controller Modules and Arduino és rájössz hogy ott van megírva már az arduino minta programjai között amit csinálni akarsz. [#vigyor3]
Nem érdemes a kereket feltalálni ismét, ne szenvedj vele vannak jó kis libary-k hozzá.
Ezt olvasd el:
Easy Driver Examples
Tehát ami nálad pl kimaradt, hogy nem számolod hány lépést tettél meg eddig, persze végig léptetheted így is ahogy csináltad de elég durva és fölösleges megoldás.
És akkor olvasd el ezt L298N Dual Motor Controller Modules and Arduino és rájössz hogy ott van megírva már az arduino minta programjai között amit csinálni akarsz. [#vigyor3]
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 február 05, 13:17
Írta: keri Dátum 2016 február 05, 13:17
Arduinohoz nem értek, tehát a szintaktikára nem tudok mint mondani, de program szempontjából kb. jó.
Észrevételek:
-Az outputot, miért Inputnak nevezed el?
-Lépés fázis késleltetést tedd ki állandóba, vagy változóba, így egy szám átírásával tudod a sebességet változtatni.
-én nem bitenként szoktam ki be kapcsolni a kimeneteket, hanem 4 báljton tárolom a kimenetek állapotát, és simán azt küldöm a komplett portra. Így áttekinthetőbbek a fázisok is.
pl ez a fél lépésées megoldás picival jobb mint az általad írt egész lépés. (gondolom hidat vezérelsz vele ha 4 kimenet van.)
AB CD
00
Észrevételek:
-Az outputot, miért Inputnak nevezed el?
-Lépés fázis késleltetést tedd ki állandóba, vagy változóba, így egy szám átírásával tudod a sebességet változtatni.
-én nem bitenként szoktam ki be kapcsolni a kimeneteket, hanem 4 báljton tárolom a kimenetek állapotát, és simán azt küldöm a komplett portra. Így áttekinthetőbbek a fázisok is.
pl ez a fél lépésées megoldás picival jobb mint az általad írt egész lépés. (gondolom hidat vezérelsz vele ha 4 kimenet van.)
AB CD
00
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 február 05, 13:24
Írta: keri Dátum 2016 február 05, 13:24
Na szóval:
AB CD
00 01
01 01
01 00
01 10
00 10
10 10
10 00
10 01
AB CD
00 01
01 01
01 00
01 10
00 10
10 10
10 00
10 01
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 február 05, 13:35
Írta: keri Dátum 2016 február 05, 13:35
...és természetesen ezt 8 bájton tárolom, és indirekt címzéssel szoktam ciklikusan betölteni.
így nem kell annyiszor leírni.
Szóval mégegyszer:
MEgszakítást teszek a DIRection lábra, meg a STEP lábra.
DIR láb állapota beírodik egy FLAG változóba.
STEP megszakítás meghívja a STEP függvényt/szubrutint/makrot/ciklust vagy t.om tudja minek hívják mostanában.
Ennek az elején DIR flag függvényében vagy hozzáadok vagy levonok egyet a fázis változóból, majd ennek a változónak törlöm a felső 5 bitjét, ezzel biztosítom hogy 0-7 között pörögjön.
Aztán ezt hozzáadom a kimeneti fázisok memóiájának kezdő címéhez (ebből is érdemes állandót csinálni mindjárt az elején) és ezt lehívom, átküldöm a kimenetre.
Kb. ennyi.
Természetesen ha nem kintről akarod vezérelni, akkor ezt az egészet megszakítások nélkül berakod egy ciklusba, késleltetéssel, mert így a te programod csak egyet lép.
így nem kell annyiszor leírni.
Szóval mégegyszer:
MEgszakítást teszek a DIRection lábra, meg a STEP lábra.
DIR láb állapota beírodik egy FLAG változóba.
STEP megszakítás meghívja a STEP függvényt/szubrutint/makrot/ciklust vagy t.om tudja minek hívják mostanában.
Ennek az elején DIR flag függvényében vagy hozzáadok vagy levonok egyet a fázis változóból, majd ennek a változónak törlöm a felső 5 bitjét, ezzel biztosítom hogy 0-7 között pörögjön.
Aztán ezt hozzáadom a kimeneti fázisok memóiájának kezdő címéhez (ebből is érdemes állandót csinálni mindjárt az elején) és ezt lehívom, átküldöm a kimenetre.
Kb. ennyi.
Természetesen ha nem kintről akarod vezérelni, akkor ezt az egészet megszakítások nélkül berakod egy ciklusba, késleltetéssel, mert így a te programod csak egyet lép.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 február 05, 13:43
Írta: keri Dátum 2016 február 05, 13:43
Abba semmi poén.[#idiota]
Ez tipikusan jó kezdő tanuló feladat.
Persze lehet library-t használni, de abból nem lehet tanulni, másrészt én jobb szeretem magam programozni az időkritikus részeket.
Ez tipikusan jó kezdő tanuló feladat.
Persze lehet library-t használni, de abból nem lehet tanulni, másrészt én jobb szeretem magam programozni az időkritikus részeket.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 február 05, 13:45
Írta: keri Dátum 2016 február 05, 13:45
Amúgy meg ha az egyszerűség a cél akkor készen kell venni egy microsteppinges vezérlőt.
A 3D nyomtatókban használt bélyegeket meg lehet fejelni tetszőleges teljesítményű FET-el....bár nagyobb teljesítményen már az ilyen sima mikrosztep sem "menő"
A 3D nyomtatókban használt bélyegeket meg lehet fejelni tetszőleges teljesítményű FET-el....bár nagyobb teljesítményen már az ilyen sima mikrosztep sem "menő"
Cím: Re:Léptetőmotor
Írta: ludus Dátum 2016 február 12, 08:45
Írta: ludus Dátum 2016 február 12, 08:45
Sziasztok!
Meg lehet oldani egy léptető motornál hogy megállás után elektronikusan "befékezze magát" a következő indításig? A4988 vezérlőm van.
Köszönöm - ludus
Meg lehet oldani egy léptető motornál hogy megállás után elektronikusan "befékezze magát" a következő indításig? A4988 vezérlőm van.
Köszönöm - ludus
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 február 12, 09:25
Írta: keri Dátum 2016 február 12, 09:25
Rajta kell hagyni a tartó áramot és akkor ottmarad.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 február 12, 09:34
Írta: keri Dátum 2016 február 12, 09:34
Ha meg kikapcsolt állapotban akarod rögzíteni, arra meg van olyan motor aminek a végén van fék.
de gyanítom neked nincs szükséged ilyenre, bár néha előfordulnak mágnesfékes motorok olcsón. Nekem pl van 3darab kilós áron vettem a vastelepen, csak sajna 5fázisú így spéci meghajtás kell neki.
Ha a Z tengely nem önzáró, akkor van hogy egy rugóval kompenzálják a súlyát, így megakadályozva hogy leessen egy áramszünet esetén, nem utolsó sorban a motorról is levesz egy kis munkát.
Illetve használaton kívül el kell küldeni parkolópályára ahol beakasztva rögzítik a Z-t.
Az hogy újra induláskor esetlen nem ugyan ott van, nem olyan nagy gond, el kell küldeni a HOME kapcsolóra meg amúgy is érdemes kalibrálni használat előtt.
de gyanítom neked nincs szükséged ilyenre, bár néha előfordulnak mágnesfékes motorok olcsón. Nekem pl van 3darab kilós áron vettem a vastelepen, csak sajna 5fázisú így spéci meghajtás kell neki.
Ha a Z tengely nem önzáró, akkor van hogy egy rugóval kompenzálják a súlyát, így megakadályozva hogy leessen egy áramszünet esetén, nem utolsó sorban a motorról is levesz egy kis munkát.
Illetve használaton kívül el kell küldeni parkolópályára ahol beakasztva rögzítik a Z-t.
Az hogy újra induláskor esetlen nem ugyan ott van, nem olyan nagy gond, el kell küldeni a HOME kapcsolóra meg amúgy is érdemes kalibrálni használat előtt.
Cím: Re:Léptetőmotor
Írta: ludus Dátum 2016 február 12, 10:37
Írta: ludus Dátum 2016 február 12, 10:37
Bekapcsolt állapotában akarom rögzíteni és pont ez lenne a kérdés hogy ennél a vezérlőnél hogyan tudom rajtahagyni a tartóáramot?
Cím: Re:Léptetőmotor
Írta: Karácsony Sándor Dátum 2016 február 12, 10:48
Írta: Karácsony Sándor Dátum 2016 február 12, 10:48
A léptető vezérlése szinte mindig ilyen .Tehát ,ha megáll egy pozícióban akkor a "tartóáram" az adott pozícióban tartja a következő indításig v. a kikapcsolásig.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2016 február 12, 14:34
Írta: Szalai György Dátum 2016 február 12, 14:34
Az A4988 adatlapján nem látok tartóáram funkciót.
Ha nincs neki, akkor lépésjel hiánykor rövid idő után megszünteti a tekercsáramot, a motortengely így külső erő hatására elfordul.
Akkor marad a fékes megoldás, vagy célszerűbb motorvezérlő használata.
Vagy elnéztem.
Ha nincs neki, akkor lépésjel hiánykor rövid idő után megszünteti a tekercsáramot, a motortengely így külső erő hatására elfordul.
Akkor marad a fékes megoldás, vagy célszerűbb motorvezérlő használata.
Vagy elnéztem.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 február 12, 15:06
Írta: keri Dátum 2016 február 12, 15:06
Amíg az ENA lábon jel van nem fogja elengedni.
3D nyomtatóhoz is ezek vannak használva, jó ez alap dolgokra.
3D nyomtatóhoz is ezek vannak használva, jó ez alap dolgokra.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2016 február 12, 15:59
Írta: svejk Dátum 2016 február 12, 15:59
Ha ez úgy lenne, akkor nem is lenne használható, mert microstep üzemmódban step jel nélkül minduntalan beugorna valamelyik egész fizikai állásba.
Viszont a tartóáramot a Sleep bementen keresztül is deaktiválni lehet nem csak az Enable-vel.
Viszont a tartóáramot a Sleep bementen keresztül is deaktiválni lehet nem csak az Enable-vel.
Cím: Re:Léptetőmotor
Írta: 9v9rb6gau Dátum 2016 február 13, 21:54
Írta: 9v9rb6gau Dátum 2016 február 13, 21:54
Üdv Urak!
Sikerült-e már valakinek VISCOM SMB 2-es, vagy SMB 3-as léptetőmotor vezérlő kártyát megszólaltatnia?
Sikerült-e már valakinek VISCOM SMB 2-es, vagy SMB 3-as léptetőmotor vezérlő kártyát megszólaltatnia?
Cím: Re:Léptetőmotor
Írta: 5fgy7npup Dátum 2016 február 15, 06:45
Írta: 5fgy7npup Dátum 2016 február 15, 06:45
Sziasztok! Easy Driver Léptető motor meghajtót keresek!!
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2016 február 16, 09:30
Írta: ht0cjk58i Dátum 2016 február 16, 09:30
Üdv Urak!
De rég jártam erre.
Lenne 1 olyan kérdésem, hogy valaki léptetőmotorokat 1 step/dir jellel szinkronban járatni( 2db illetve 4 db mocit kéne így járatni).
Köszönöm
De rég jártam erre.
Lenne 1 olyan kérdésem, hogy valaki léptetőmotorokat 1 step/dir jellel szinkronban járatni( 2db illetve 4 db mocit kéne így járatni).
Köszönöm
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2016 február 16, 09:41
Írta: D.Laci Dátum 2016 február 16, 09:41
Szaladj neki még egyszer :)
Ha jól értem, amit nem értek akkor elég párhuzamosan a vezérlőket bekötni, már ha van vezérlő?
Ha jól értem, amit nem értek akkor elég párhuzamosan a vezérlőket bekötni, már ha van vezérlő?
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2016 február 16, 11:19
Írta: ht0cjk58i Dátum 2016 február 16, 11:19
Lehetséges hogy úgy is menne, de még nem próbáltam,arra gondoltam, hogy van-e valami speckó kötés vagy elég párhuzamosan kötni a vezérlőket?
Cím: Re:Léptetőmotor
Írta: ki005gz70 Dátum 2016 február 16, 11:30
Írta: ki005gz70 Dátum 2016 február 16, 11:30
Úgy működik a dolog, mert csináltam, hogy 1 vezérlőre kötni több léptetőmotort. Attól függően hogy milyen feszültségen, milyen áramon dolgozik a vezérlő, és hogy gyors, vagy nyomatékos sebességet akarsz a motoroknak kell párhuzamosan vagy sorosan kötni. De a lényeg hogy működik.
Sőt ! ha párhuzamosan vannak kötve a motorok, akkor az indukció miatt egymást gerjesztik, és nagyon szépen dolgoznak össze, kisebb valószínűséággel fog bármelyik is lépéstvesztveszteni.
Sőt ! ha párhuzamosan vannak kötve a motorok, akkor az indukció miatt egymást gerjesztik, és nagyon szépen dolgoznak össze, kisebb valószínűséággel fog bármelyik is lépéstvesztveszteni.
Cím: Re:Léptetőmotor
Írta: ki005gz70 Dátum 2016 február 16, 11:38
Írta: ki005gz70 Dátum 2016 február 16, 11:38
Ezen a gépen összesen 6 motor van, és 2 vezérlőről megy. Az alsó 4 párhuzamosan egymással, és a fölső 2 is párhuzamosan egymással.

Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2016 február 16, 13:33
Írta: ht0cjk58i Dátum 2016 február 16, 13:33
Köszönöm a segítséget!!!!
Cím: Re:Léptetőmotor
Írta: ki005gz70 Dátum 2016 február 16, 15:49
Írta: ki005gz70 Dátum 2016 február 16, 15:49
Szívesen !
Cím: Re:Léptetőmotor
Írta: 0bn8uxmw Dátum 2016 február 16, 16:12
Írta: 0bn8uxmw Dátum 2016 február 16, 16:12
Írtam.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2016 február 24, 11:35
Írta: 000000000 Dátum 2016 február 24, 11:35
Sziasztok!
Tanácstalan vagyok léptetőmotor ügyben.
Nema 11-es léptetőmotort használok.
L298N motorvezérlővel, és egy comfiletech cubloc mikrovezérlővel. A mikrovezérlő BASIC-ban programozható.
Van egy apró probléma, amit nem veszek észre, és ami miatt a motor recsegő hangot ad ki, és lépést is veszít, azonban az utóbbit nem állandó jelleggel.
Az L298N vezérlőt összeszerelve vettem, nyákján: +VDC, Gnd, l1, l2, l3, l4, Enable1-2, Enable3-4 bemenetek
és M1 M2 M3 M4 kimenetek vannak.
A 12V tápot rákötöttem, ezek után a Cubloc vezérlő adott portjait p48,p49,p50,p51 rendre a motorvezérlő bemeneteire l1-l4ig, a p39 portot pedig az Enable 1-2, és az Enable 34-re.
A programban az egész port blokknak binárisan adom az utasításokat, a ciklus előtt high-ra állítva az enable jelet.
high 39
for a=1 to 10
byteout 5, &b00000001
delay 10
byteout 5, &b00000010
delay 10
byteout 5, &b00000001
delay 10
byteout 5, &b00000010
delay 10
next
//a bináris kiosztás 1-esei sorrendben a p48, // p49, p50, p51.
majd vissza:
high 39
for b=1 to 10
byteout 5, &b00001000
delay 10
byteout 5, &b00000100
delay 10
byteout 5, &b00000010
delay 10
byteout 5, &b00000001
delay 10
next
a motor viszont lépést veszít, és visszafelé elállítódik.
P.S.:
Ez csak egy példa, amit írtam, a valóságban sokkal több ciklust megy 2 darab motor, 2 külön motorvezérlőről, azonos portblokkról, így a jelek
00010001
00100010
01000100
10001000
Nem tudok rájönni, mitől lehet a karcoló hang, és a lépésvesztés.
Köszönök mindennemű segítséget!
Tanácstalan vagyok léptetőmotor ügyben.
Nema 11-es léptetőmotort használok.
L298N motorvezérlővel, és egy comfiletech cubloc mikrovezérlővel. A mikrovezérlő BASIC-ban programozható.
Van egy apró probléma, amit nem veszek észre, és ami miatt a motor recsegő hangot ad ki, és lépést is veszít, azonban az utóbbit nem állandó jelleggel.
Az L298N vezérlőt összeszerelve vettem, nyákján: +VDC, Gnd, l1, l2, l3, l4, Enable1-2, Enable3-4 bemenetek
és M1 M2 M3 M4 kimenetek vannak.
A 12V tápot rákötöttem, ezek után a Cubloc vezérlő adott portjait p48,p49,p50,p51 rendre a motorvezérlő bemeneteire l1-l4ig, a p39 portot pedig az Enable 1-2, és az Enable 34-re.
A programban az egész port blokknak binárisan adom az utasításokat, a ciklus előtt high-ra állítva az enable jelet.
high 39
for a=1 to 10
byteout 5, &b00000001
delay 10
byteout 5, &b00000010
delay 10
byteout 5, &b00000001
delay 10
byteout 5, &b00000010
delay 10
next
//a bináris kiosztás 1-esei sorrendben a p48, // p49, p50, p51.
majd vissza:
high 39
for b=1 to 10
byteout 5, &b00001000
delay 10
byteout 5, &b00000100
delay 10
byteout 5, &b00000010
delay 10
byteout 5, &b00000001
delay 10
next
a motor viszont lépést veszít, és visszafelé elállítódik.
P.S.:
Ez csak egy példa, amit írtam, a valóságban sokkal több ciklust megy 2 darab motor, 2 külön motorvezérlőről, azonos portblokkról, így a jelek
00010001
00100010
01000100
10001000
Nem tudok rájönni, mitől lehet a karcoló hang, és a lépésvesztés.
Köszönök mindennemű segítséget!
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2016 február 24, 11:50
Írta: s7manbs8 Dátum 2016 február 24, 11:50
A basicből a jelek egyenletesen mennek ki ? Motor áram jól be van állítva ?
Cím: Re:Léptetőmotor
Írta: r5y7cufaj Dátum 2016 március 02, 11:18
Írta: r5y7cufaj Dátum 2016 március 02, 11:18
Sziasztok!
A gépem jelenleg 800mm/perc-el tud max dolgozni, ennél nagyobb előtolásnál a motor téveszt. Gyorsítani akarom a gépet. A motorokra nagyobb veszültséget nem tudok adni mert a vezérlő fix 24V-os. A golyós orsó cseréjét (nagyobb menetemelkedésűre) nem szeretném, mert költséges lenne. Viszont, (itt jön a dilemmám) a bordáskerek cseréjével nem tudom, hogy gyorsìtható-e a gép. Mert ha most a bordáskerekek aránya 1:1, machban pl 500-ra van állítva a lépés. Cserélem a meghajtó kereket, gyorsítok pl 2:1-el és vissza kell írnom a machban a 500-as lépést kisebb értékre, akkor nem ugyan ott leszek a sebesség szempontjábol?!
Köszi
A gépem jelenleg 800mm/perc-el tud max dolgozni, ennél nagyobb előtolásnál a motor téveszt. Gyorsítani akarom a gépet. A motorokra nagyobb veszültséget nem tudok adni mert a vezérlő fix 24V-os. A golyós orsó cseréjét (nagyobb menetemelkedésűre) nem szeretném, mert költséges lenne. Viszont, (itt jön a dilemmám) a bordáskerek cseréjével nem tudom, hogy gyorsìtható-e a gép. Mert ha most a bordáskerekek aránya 1:1, machban pl 500-ra van állítva a lépés. Cserélem a meghajtó kereket, gyorsítok pl 2:1-el és vissza kell írnom a machban a 500-as lépést kisebb értékre, akkor nem ugyan ott leszek a sebesség szempontjábol?!
Köszi
Cím: Re:Léptetőmotor
Írta: r5y7cufaj Dátum 2016 március 02, 11:23
Írta: r5y7cufaj Dátum 2016 március 02, 11:23
Szia!
Nekem is volt hasonló problémám régebben. Recsegett a motor és egyik irányba kevesebbet lépett. Én mach3-at használok és ott nekem a megoldás az active low-al volt. Most nem tudom, hogy be vagy ki kellett pipálni de az volt a megoldás. Ha kell holnap meg tudom nézni.
Üdv!
Nekem is volt hasonló problémám régebben. Recsegett a motor és egyik irányba kevesebbet lépett. Én mach3-at használok és ott nekem a megoldás az active low-al volt. Most nem tudom, hogy be vagy ki kellett pipálni de az volt a megoldás. Ha kell holnap meg tudom nézni.
Üdv!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2016 március 02, 11:33
Írta: 000000000 Dátum 2016 március 02, 11:33
Nem, nem leszel ugyanott.
Az elméleti sebességed meg duplázódik. A felbontásod a felére esik.
De ezzel egy időben a motorod orsóra jutó ereje a felére esik.
Kérdés az, elég lesz e a meglévő motorok. Vagy cserélni kell.
Szinte kísértetiesen ugyanez áll fenn nagyobb emelkedésű orsóra való csere esetén is.
Cím: Re:Léptetőmotor
Írta: r5y7cufaj Dátum 2016 március 02, 12:08
Írta: r5y7cufaj Dátum 2016 március 02, 12:08
Köszönöm a választ!
Cím: Re:Léptetőmotor
Írta: dezso74 Dátum 2016 március 30, 15:17
Írta: dezso74 Dátum 2016 március 30, 15:17
Sziasztok!
Van valakinek TB6600-as léptetőmotor vezérlő IC-hez kapcsolása?
Előre is köszönöm!
Üdv: Dezső
Van valakinek TB6600-as léptetőmotor vezérlő IC-hez kapcsolása?
Előre is köszönöm!
Üdv: Dezső
Cím: Re:Léptetőmotor
Írta: u6p5jr23k Dátum 2016 március 30, 21:12
Írta: u6p5jr23k Dátum 2016 március 30, 21:12
ENNEK alapján elindulhatsz.
Cím: Re:Léptetőmotor
Írta: dezso74 Dátum 2016 március 31, 07:30
Írta: dezso74 Dátum 2016 március 31, 07:30
Szia Kocsora!
Nagyon szépen köszönöm a segítséget!!!!
Szép napot!
Dezső
Nagyon szépen köszönöm a segítséget!!!!
Szép napot!
Dezső
Cím: Re:Léptetőmotor
Írta: hncneuby Dátum 2016 április 04, 12:51
Írta: hncneuby Dátum 2016 április 04, 12:51
Sziasztok!
Tudna valaki segíteni abban, hogy nagyságrendileg mekkora nyomatékú léptetőmotor szükséges a következő CNC tengely mozgatásához?
- Két 1605-ös golyósorsó mozgatná a végein egy egy motor tengelykapcsolóval.
- 20-as lineáris vezetéken mozog 2-2 kocsin. Teljes elmozdulás 1000mm.
- Kb össz. 60kg
- Megmunkált anyagok: Fa és alu.
Ha odajutok megpróbálom kiszámolni pontosan, csak hátha van valakinek hasonló paraméterekkel rendelkező gépe...
Előzetes anyagi számolgatáshoz kelen.
Tudna valaki segíteni abban, hogy nagyságrendileg mekkora nyomatékú léptetőmotor szükséges a következő CNC tengely mozgatásához?
- Két 1605-ös golyósorsó mozgatná a végein egy egy motor tengelykapcsolóval.
- 20-as lineáris vezetéken mozog 2-2 kocsin. Teljes elmozdulás 1000mm.
- Kb össz. 60kg
- Megmunkált anyagok: Fa és alu.
Ha odajutok megpróbálom kiszámolni pontosan, csak hátha van valakinek hasonló paraméterekkel rendelkező gépe...
Előzetes anyagi számolgatáshoz kelen.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2016 április 04, 13:30
Írta: svejk Dátum 2016 április 04, 13:30
Ha megelégszel a dierkthajtással 2 Nm-el elindulhatsz, azok jó ár/érték arányban is vannak.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2016 április 04, 15:16
Írta: 000000000 Dátum 2016 április 04, 15:16
Mikor érdemes léptetőhöz áttételt használni? Nem marad több nyomaték, ha alacsonyabb fordulaton pörög a motor ?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2016 április 04, 19:21
Írta: svejk Dátum 2016 április 04, 19:21
Csökkentő áttételt túl nagy, több tíz mm emelkedésű orsónál,fogasléces hajtásoknál, gyorsító áttételt kis emelkedésű orsóknál.
Hobby gépeknél általában van egy sebesség cél, ezt kitűzve lehet nyomatékra keresni motort/áttételt és az optimum gyorsulást megkeresni amt még elvisel az adott váz.
Hobby gépeknél általában van egy sebesség cél, ezt kitűzve lehet nyomatékra keresni motort/áttételt és az optimum gyorsulást megkeresni amt még elvisel az adott váz.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2016 április 04, 20:21
Írta: Szalai György Dátum 2016 április 04, 20:21
A léptető motorral épp az a helyzet, hogy alacsony fordulaton nem forog.
Hanem ugrál.
Elég szűk az az impulzus tartomány, amikor a forgás nagyjából egyenletes szögsebességgel történik és a forgató nyomaték sem csökken nagyon.
(Sajnos a tartónyomatékból nem születik gyorsulás.)
Hanem ugrál.
Elég szűk az az impulzus tartomány, amikor a forgás nagyjából egyenletes szögsebességgel történik és a forgató nyomaték sem csökken nagyon.
(Sajnos a tartónyomatékból nem születik gyorsulás.)
Cím: Re:Léptetőmotor
Írta: hncneuby Dátum 2016 április 05, 10:36
Írta: hncneuby Dátum 2016 április 05, 10:36
Köszönöm!
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2016 június 26, 17:17
Írta: ANTAL GÁBOR Dátum 2016 június 26, 17:17
Gondolom hasznos ha leírom a tegnapi és a mai szívásomat ( okulásként ) Mindent egybevéve kb 10 órám ment el hiába . Egy ipari berendezésben egy súlyos eszközt egy csigahajtás+ láncáttétel segítségével fordítok . A csigára egy lépetővel hajtok rá . A léptetőt gyári driver hajtja , a stepgenerátor egy PIC es verzió kiegészítve hallos végállásokkel engedélyezéssel , rámpával stb Varga István (aliasz Is Varga írta a hexát )
A berendezés egy évvel ezelőtt már megépült ez egy klón
Minden gyönyörűen be van szerelve e dobozba , tegnap éleszteném . A driver M545D . Minthogy a dobozban már nem volt látható a jumper ezért nosza internet , rákerestem a driver adatlapjára . Egy magyar forgalmazónál ( nem pécsi nem Sir nyeteg és nem Klavió ) rátaláltam egy magyar nyelvű leírásra , és annak alapján beállítottam az eszközt . Próbára jó lesz a féllépéses üzem ezért az utolsó 4 jumpernél 0,0,0,0 t állítottam
És ezzel elkezdődött a szívatás . Már tegnap kivettem a stepgenerátort .Hajnalban szkóppal minden OK de biztos ami biztos újra programoztam a PIC et . Aztán ma külső tápról másik motorral , " reszelős stepgenerátorral " minden kipróbáltam . Már a drivert is szétbontottam ... Aztán a kezembe kerül a fedele és döbbenten olvasom hogy a 0,0,0,0 kombináció az " disabled "kombináció . Hát ilyen hülye lennék ??? Nosza még egyszer megnézem az adatlapot . Nem ott úgy van ahogy korábban hittem . Hát ránagyítok az adatlapon lévő fotóra ott is úgy van és nézem tovább a fotót hat ott a vezérlő tipusa CW-5045 ... Miközben a pdf az M 545 D ről szól .. Vagyis a kereskedő a M545D adatlapjának becsatolja a CW-5045 ös driver adatlapját
Egy találós kérdés marad de arra nem is várom a választ : Kinek a honlapjáról töltöttem le a hibás adatlapot....
A berendezés egy évvel ezelőtt már megépült ez egy klón
Minden gyönyörűen be van szerelve e dobozba , tegnap éleszteném . A driver M545D . Minthogy a dobozban már nem volt látható a jumper ezért nosza internet , rákerestem a driver adatlapjára . Egy magyar forgalmazónál ( nem pécsi nem Sir nyeteg és nem Klavió ) rátaláltam egy magyar nyelvű leírásra , és annak alapján beállítottam az eszközt . Próbára jó lesz a féllépéses üzem ezért az utolsó 4 jumpernél 0,0,0,0 t állítottam
És ezzel elkezdődött a szívatás . Már tegnap kivettem a stepgenerátort .Hajnalban szkóppal minden OK de biztos ami biztos újra programoztam a PIC et . Aztán ma külső tápról másik motorral , " reszelős stepgenerátorral " minden kipróbáltam . Már a drivert is szétbontottam ... Aztán a kezembe kerül a fedele és döbbenten olvasom hogy a 0,0,0,0 kombináció az " disabled "kombináció . Hát ilyen hülye lennék ??? Nosza még egyszer megnézem az adatlapot . Nem ott úgy van ahogy korábban hittem . Hát ránagyítok az adatlapon lévő fotóra ott is úgy van és nézem tovább a fotót hat ott a vezérlő tipusa CW-5045 ... Miközben a pdf az M 545 D ről szól .. Vagyis a kereskedő a M545D adatlapjának becsatolja a CW-5045 ös driver adatlapját
Egy találós kérdés marad de arra nem is várom a választ : Kinek a honlapjáról töltöttem le a hibás adatlapot....
Cím: Re:Léptetőmotor
Írta: Gyati Dátum 2016 június 26, 17:34
Írta: Gyati Dátum 2016 június 26, 17:34
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2016 június 26, 17:56
Írta: ANTAL GÁBOR Dátum 2016 június 26, 17:56
Te írtad [#ejnye1][#ejnye1]
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2016 június 26, 19:07
Írta: jani300 Dátum 2016 június 26, 19:07
A "reszelős stepgenerátor" az 5volt külső feszültség reszelővel szaggatva ?
Csinálok akkor így egy próbát .
Csinálok akkor így egy próbát .
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2016 június 26, 19:30
Írta: ANTAL GÁBOR Dátum 2016 június 26, 19:30
Kínomban próbáltam : nem teszem le a nagy esküt hogy működik mert ugye az a jel azért mégsem egy jól definiált négyszög . De annó ha egy nagyfesz gyújtást akartunk tesztelni akkor a megszakítókalapácsot jól helyettesítette a reszelő és egy darab sokeres vezeték .
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2016 június 26, 19:35
Írta: ANTAL GÁBOR Dátum 2016 június 26, 19:35
Egy kérdés a publikumnak ( a reszelős stepgenerátorról jut az eszembe . ) Van egy deprez műszerünk ( de lehet egy digitális multiméter is ) Meg akarunk bizonyosodni hogy működik e . ( zsinór van hozzá ) Egy átlagember zsebében található eszközökből kellene valamit eszkábálni amivel tesztelhetjük a műszert .. Hogyan ?
Cím: Re:Léptetőmotor
Írta: hostya Dátum 2016 június 26, 19:41
Írta: hostya Dátum 2016 június 26, 19:41
Mobiltelefon...
Aksi ki, aksi pólusait a mérőzsinórral megérint... :)
Aksi ki, aksi pólusait a mérőzsinórral megérint... :)
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2016 június 26, 19:59
Írta: ANTAL GÁBOR Dátum 2016 június 26, 19:59
és 35 évvel ezelőtt ??
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2016 június 26, 20:31
Írta: Rabb Ferenc Dátum 2016 június 26, 20:31
35 évvel ezelőtt könnyű volt, mert akkor még volt alumínium pénzérme is.
1Ft alu, 2Ft réz-nikkel ötvözet. Egy "sercintés" és máris van kb 1,5 Volt...
1Ft alu, 2Ft réz-nikkel ötvözet. Egy "sercintés" és máris van kb 1,5 Volt...
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2016 június 26, 20:35
Írta: PSoft Dátum 2016 június 26, 20:35
Elkéstem...Feri már megmondta a tutit!:)
Azt akartam mondani, hogyha van a zsebedben három forint két darabban, akkor már nyert ügyed van.:))
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2016 június 26, 20:39
Írta: ANTAL GÁBOR Dátum 2016 június 26, 20:39
OK de én még egy papir zsebkendő darabot is be szoktam vetni. Az tartotta az "elektrolitot" Egyébként működik az a mai pénzekkel is
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2016 június 26, 20:44
Írta: PSoft Dátum 2016 június 26, 20:44
Hehe!
35 éve...papírzsebkendő?[#nemtudom]
Opppsz!
(lehet, hogy mégis volt)???
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2016 június 26, 20:47
Írta: Rabb Ferenc Dátum 2016 június 26, 20:47
Elektrolitos zsepi csak van kéznél... [#vigyor2]
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2016 június 26, 20:58
Írta: PSoft Dátum 2016 június 26, 20:58
Na de, azt...megnyálazni, ha nem elég "nyirkos"!!![#csodalk][#wow1]
[#vigyor2]
Cím: Re:Léptetőmotor
Írta: KoLa Dátum 2016 június 26, 22:05
Írta: KoLa Dátum 2016 június 26, 22:05
Van egy papírzsepid?
- nincs!csak műsoros!
- nincs!csak műsoros!
Cím: Re:Léptetőmotor
Írta: vjanos Dátum 2016 június 26, 22:10
Írta: vjanos Dátum 2016 június 26, 22:10
A két mérőcsúcsot kézbe fogva az emberi test ellenállását mérni jó alternatív megoldás?
A kezem is szokott zsebben lenni :)
Vagy ha csipogós a multiméter, akkor csak összeérinteni a csúcsokat :)
A kezem is szokott zsebben lenni :)
Vagy ha csipogós a multiméter, akkor csak összeérinteni a csúcsokat :)
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2016 június 27, 06:43
Írta: ANTAL GÁBOR Dátum 2016 június 27, 06:43
De a módszer csak a multiméternél ad eredményt , a deprez is szerepelt a felsorolásban oda mindenképp kell a feszültségforrás ....
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2016 június 27, 07:24
Írta: Motoros Dátum 2016 június 27, 07:24
Nem kell sem elem sem semmi a deprez alapműszerhez.
A mérőzsinórral rövidrezárom a deprez műszert.
A műszert megmozgatva a mutató jelentős csillapítással leng, mig nyitott állapotban csapkod ide oda.
A lényeg persze, hogy az alap műszerhez direktbe hozzá férjek, és ne kavarjon be semmi sönt.
A mérőzsinórral rövidrezárom a deprez műszert.
A műszert megmozgatva a mutató jelentős csillapítással leng, mig nyitott állapotban csapkod ide oda.
A lényeg persze, hogy az alap műszerhez direktbe hozzá férjek, és ne kavarjon be semmi sönt.
Cím: Re:Léptetőmotor
Írta: wm94bppdn Dátum 2016 június 27, 10:38
Írta: wm94bppdn Dátum 2016 június 27, 10:38
Szerintem is ez a legszebb megoldás!
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2016 június 27, 13:20
Írta: ANTAL GÁBOR Dátum 2016 június 27, 13:20
Szellemes megoldás ...[#eljen]
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2016 június 27, 14:55
Írta: Motoros Dátum 2016 június 27, 14:55
Egyébként a nyalás is jó.
Lényeg, hogy nehogy eldurranjon idő előtt a nagy delejtől.
Ezért elemmel nem próbálnám sosem.
Ha végkitérésbe vág a mutató, ami a jobbaknál üvegből volt,...és ha eltörik akkor ha kell van üvegmutatóm még pár.
Lényeg, hogy nehogy eldurranjon idő előtt a nagy delejtől.
Ezért elemmel nem próbálnám sosem.
Ha végkitérésbe vág a mutató, ami a jobbaknál üvegből volt,...és ha eltörik akkor ha kell van üvegmutatóm még pár.
Cím: Re:Léptetőmotor
Írta: kaqkk007 Dátum 2016 június 27, 17:42
Írta: kaqkk007 Dátum 2016 június 27, 17:42
"három forint két darabban" tudtommal már az 5 forintosnál nincs kisebb pénz forgalomban ...
Cím: Re:Léptetőmotor
Írta: kaqkk007 Dátum 2016 június 27, 18:40
Írta: kaqkk007 Dátum 2016 június 27, 18:40
Bocsi nem olvastam vissza eléggé .....
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2016 június 27, 20:56
Írta: PSoft Dátum 2016 június 27, 20:56
"Egyébként a nyalás is jó.
Lényeg, hogy nehogy eldurranjon idő előtt a nagy delejtől."
Most, vonatkoztassunk el kicsit a Deprez műszertől,....
Mindkét megállapításod igaz, megállja a helyét más összefüggésben is.:)))
(bocs Misi, de...hat órája pattog ez a magas labda)
[#nevetes1]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2016 június 27, 21:36
Írta: 000000000 Dátum 2016 június 27, 21:36
Sziasztok!
Segítsetek, mit rontottam el?
Az egyik léptetőmotorom 2x annyit fordul, mint a másik, de nem értem, mi lehet a baj.
Nem azonos típus, de mindkettő Nema17 és 1,8 fokos.
Segítsetek, mit rontottam el?
Az egyik léptetőmotorom 2x annyit fordul, mint a másik, de nem értem, mi lehet a baj.
Nem azonos típus, de mindkettő Nema17 és 1,8 fokos.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 június 27, 21:41
Írta: keri Dátum 2016 június 27, 21:41
Egész lépés/fél lépés állítás a vezérlőn?
Vagy lehet hogy az egyik mégsem 1,8fokos. Nekem is van 0,9fokos léptetőm.
Bár ez hamar kiderül ha kézzel megtekered.
Vagy lehet hogy az egyik mégsem 1,8fokos. Nekem is van 0,9fokos léptetőm.
Bár ez hamar kiderül ha kézzel megtekered.
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2016 június 28, 16:39
Írta: Motoros Dátum 2016 június 28, 16:39
Azért volt a nagy csönd mert mindenkinek eszébe juttattam mi a jó.
Nekem meg a vicc jutott eszembe:
Az öreg Kavington bácsi vadász élményeiről mesél az unokáinak.
- Szóval, célba vettem a rosszvast. A megfelelő pillanatban meghúztam a ravaszt. Oda mentem hozzá, és azon töprengtem, hogyan vigyem el. Megfogtam a két lábát és a nyakamba tettem.
..Ekkor bejönnek a szobába és szólnak az öregnek, hogy telefonja van. Az öreg befejezte a telefonálást, majd visszament a gyerekekhez..
- Na, hol is tartottam?
- Ott, hogy a két lábát a nyakadba tetted.
- Ja igen, .. és csak nyaltam, csak nyaltam...
Nekem meg a vicc jutott eszembe:
Az öreg Kavington bácsi vadász élményeiről mesél az unokáinak.
- Szóval, célba vettem a rosszvast. A megfelelő pillanatban meghúztam a ravaszt. Oda mentem hozzá, és azon töprengtem, hogyan vigyem el. Megfogtam a két lábát és a nyakamba tettem.
..Ekkor bejönnek a szobába és szólnak az öregnek, hogy telefonja van. Az öreg befejezte a telefonálást, majd visszament a gyerekekhez..
- Na, hol is tartottam?
- Ott, hogy a két lábát a nyakadba tetted.
- Ja igen, .. és csak nyaltam, csak nyaltam...
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2016 június 28, 16:40
Írta: Motoros Dátum 2016 június 28, 16:40
Ja bocs most látom ez a léptetős topik. :((
Cím: Re:Léptetőmotor
Írta: sasi Dátum 2016 június 28, 17:03
Írta: sasi Dátum 2016 június 28, 17:03
No igen, a CAVINTON... [#smile]
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2016 június 29, 06:55
Írta: ANTAL GÁBOR Dátum 2016 június 29, 06:55
Egy ismerősöm szenved egy lépetőmotoros kameramozgatóval ami bizonyos esetekben rezonál ( és az a felvett képnél zavaró ): Rákerestem a rezonanciára és pont itt a fórumos dolgok között találtam néhány bejegyzést ( Talán Kéri Laci írta ). Ki tudja pár szóval pontosan megfogalmazni a pontos okot mert akkor az ellene való védekezés is meg lesz . A motor drivere egyedi és ott lehetőség lenne a mikrolépés elektronikus ( nem a szokásos jumperes ) gyors megváltoztatásának és ehhez kapcsolódóan a stepfreki átállításának . Gondolom ha egy adott mechanika mellett az ember fel tudná venni a kritikus rezonancia helyeket akkor pl a jelzett módon azokat ki is lehetne hagyni. ( ha a Trabantomnak ki akart esni az üvege anno az alapjáraton akkor rátapostam a gázra )
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2016 június 29, 07:22
Írta: Motoros Dátum 2016 június 29, 07:22
A régi nyomtatókban lévő léptetőknél volt az a bizonyos gumibakos felfüggesztés. Biztos a rezonanciák miatt...az nem elegendő.
A Trabanton a rezgést 4 brutál bimiláb csökkentette a motor alatt. prés lába alá is hatásos volt betenni.
A Trabanton a rezgést 4 brutál bimiláb csökkentette a motor alatt. prés lába alá is hatásos volt betenni.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2016 június 29, 08:06
Írta: Szalai György Dátum 2016 június 29, 08:06
A kétfázisú léptetőmotor, alacsony tengelyterheléssel, csak nagyon szűk léptetési frekvencia sávon képes kis amplitúdójú rezonanciakeltéssel üzemelni.
Az alacsony sebességű régióban működésmódjából eredően ugrál és az ugrások között is oszcillál, a kis tehetetlenségű tengelyterhelés meg ezt nem képes fékezni.
A rezonancia csökkentés mechanikus módja hagyományosan a forgótömeg növelése egy lendkerékkel és a motor vibrációcsillapító gumigallérra szerelése.
Újabban az elektronikus varázslatok.
Az alacsony sebességű régióban működésmódjából eredően ugrál és az ugrások között is oszcillál, a kis tehetetlenségű tengelyterhelés meg ezt nem képes fékezni.
A rezonancia csökkentés mechanikus módja hagyományosan a forgótömeg növelése egy lendkerékkel és a motor vibrációcsillapító gumigallérra szerelése.
Újabban az elektronikus varázslatok.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2016 június 29, 08:59
Írta: ANTAL GÁBOR Dátum 2016 június 29, 08:59
köszönöm mindkettőtöknek de várom még a konstruktív hozzászólásokat
Cím: Re:Léptetőmotor
Írta: vjanos Dátum 2016 június 29, 09:03
Írta: vjanos Dátum 2016 június 29, 09:03
Esetleg lassító áttétel beépítése?
Nálam a 3d nyomtatónál segített, dinamikosabb is lett és a hangja is jobb (rezonancia)
Nálam a 3d nyomtatónál segített, dinamikosabb is lett és a hangja is jobb (rezonancia)
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2016 június 29, 10:54
Írta: Motoros Dátum 2016 június 29, 10:54
Volt egyszer dolgom a Klaviótol vásárolt metalkék szinű vezérlővel, na az olyanná tette a kétfázisú léptetőt mintha szervó lenne, csendesen simán suhant, megvan valahol a tipusa is
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2016 június 29, 10:59
Írta: Szalai György Dátum 2016 június 29, 10:59
Mivel a mechanikai rendszer rezonancia frekvenciáit többek között a szerkezet geometriája határozza meg, ami pedig a mozgásút alatt folyamatosan változik, ezért az alap rezonancia frekvencia is változó lesz az út során.
A motor rezgése sem egyetlen frekvencia, hanem egymással interferáló, önmagukban is változó frekvenciájú rezgések széles spektruma.
A változó motorfrekvencia által gerjesztett változó tulajdonságú mechanika éppen aktuális önfrekvenciája kölcsönhat egymással.
Sok mindent kéne kihagynod a frekvenciasávból, hogy sehol ne rezegjen.
Rögzíthetsz rá egy kétfilléres gyorsulás érzékelő SMD IC-t és felveheted szkóppal a kimeneti jeleit.
Vagy figyelheted közvetlenül spektrum analizátorral.
Ha a lengésamplitúdók nem is lesznek hitelesek, de a rezgésfrekvenciák beszélnek majd.
Megmondják, hogy mit kéne kihagynod, de lehet, hogy az egészet, mert bármilyen frekvencián gerjeszted, valamelyik útszakaszon mindég berezonál a rendszer.
Akkor mégiscsak az marad majd, hogy rezgéscsillapítottan szereled a motort, gallért és gumikuplungot teszel rá.
A mechanikai rendszer meghatározó darabjait pedig alkalmas kompozit anyagból készíted, ahol az alkotók rezonancia frekvenciája úgy tér el, hogy nem engedik egymást berezegni.
Ez a tudomány, amit meg kell fizetni.
A motor rezgése sem egyetlen frekvencia, hanem egymással interferáló, önmagukban is változó frekvenciájú rezgések széles spektruma.
A változó motorfrekvencia által gerjesztett változó tulajdonságú mechanika éppen aktuális önfrekvenciája kölcsönhat egymással.
Sok mindent kéne kihagynod a frekvenciasávból, hogy sehol ne rezegjen.
Rögzíthetsz rá egy kétfilléres gyorsulás érzékelő SMD IC-t és felveheted szkóppal a kimeneti jeleit.
Vagy figyelheted közvetlenül spektrum analizátorral.
Ha a lengésamplitúdók nem is lesznek hitelesek, de a rezgésfrekvenciák beszélnek majd.
Megmondják, hogy mit kéne kihagynod, de lehet, hogy az egészet, mert bármilyen frekvencián gerjeszted, valamelyik útszakaszon mindég berezonál a rendszer.
Akkor mégiscsak az marad majd, hogy rezgéscsillapítottan szereled a motort, gallért és gumikuplungot teszel rá.
A mechanikai rendszer meghatározó darabjait pedig alkalmas kompozit anyagból készíted, ahol az alkotók rezonancia frekvenciája úgy tér el, hogy nem engedik egymást berezegni.
Ez a tudomány, amit meg kell fizetni.
Cím: Re:Léptetőmotor
Írta: vjanos Dátum 2016 június 29, 21:50
Írta: vjanos Dátum 2016 június 29, 21:50
Tudja-e valaki, hogy az alábbi három léptecs vezérlő csak feliratában különbözik, vagy a belsőleg is?
- Wantai DQ542MA
- Longs Motor DM542A
- Leadshine DM542
Ránézésre, paramétereire ugyanaz...
A Leadshine manual említ egy bizonyos autotuning lehetőséget az SW4 kapcsoló gyors ide-oda billentésével.
Ez vajon a többivel is megy, próbálta valaki?
- Wantai DQ542MA
- Longs Motor DM542A
- Leadshine DM542
Ránézésre, paramétereire ugyanaz...
A Leadshine manual említ egy bizonyos autotuning lehetőséget az SW4 kapcsoló gyors ide-oda billentésével.
Ez vajon a többivel is megy, próbálta valaki?
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2016 június 30, 07:04
Írta: ANTAL GÁBOR Dátum 2016 június 30, 07:04
Gyuri köszönöm a kimerítő állásfoglalást . A konklúzió : elöször érdemes a rezgésdiagnosztikai vizsgálatokat elvégezni
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 június 30, 09:27
Írta: keri Dátum 2016 június 30, 09:27
Tagadok mindent [#hehe]
Értem én hogy magadnak csinálni érdekes kihívás, de szerintem olcsóbb megvenni egy ilyen kamera gimbalt, vagy legalább a hozzá való motort, és vezérlést, mivel ezek hihetetlen jól ki vannak már találva és a kínaiak gyártják így olcsó.
Giroszkópos stabilizáció ezeknél már alap, és rezgést sem termel a motor.
Lényegében AC szervó motorok, amik közvetlenül áttétel nélkül mozgatják a kamerát ezért hihetetlen gyors is tud lenni.
Igaz analóg szervó kör lévén programozott csillag követésre lehet nem a legjobb, de ezek a motorok tuti nem rezonálnak.
De hogy a kérdésre is válaszoljak.
Léptető motornál ha az aktuális fordulathoz és a terheléshez tartozó optimális áramot megtalálod, akkor az is teljesen simán tud futni, mivel a rezonanciát az okozza, hogy minden lépésnél felgyorsít és megtorpan a motor, kisebb áramnál egyenletesen fog forogni, de így a lépésvesztést kockáztatja az ember, tehát eléggé a határon kell egyensúlyozni ha nincs mozgás visszacsatolás.
Elméletben egy elég okos vezérlő képes lehet erre, de az igazi megoldás mindenképpen a valódi szervókör alkalmazása.
Értem én hogy magadnak csinálni érdekes kihívás, de szerintem olcsóbb megvenni egy ilyen kamera gimbalt, vagy legalább a hozzá való motort, és vezérlést, mivel ezek hihetetlen jól ki vannak már találva és a kínaiak gyártják így olcsó.
Giroszkópos stabilizáció ezeknél már alap, és rezgést sem termel a motor.
Lényegében AC szervó motorok, amik közvetlenül áttétel nélkül mozgatják a kamerát ezért hihetetlen gyors is tud lenni.
Igaz analóg szervó kör lévén programozott csillag követésre lehet nem a legjobb, de ezek a motorok tuti nem rezonálnak.
De hogy a kérdésre is válaszoljak.
Léptető motornál ha az aktuális fordulathoz és a terheléshez tartozó optimális áramot megtalálod, akkor az is teljesen simán tud futni, mivel a rezonanciát az okozza, hogy minden lépésnél felgyorsít és megtorpan a motor, kisebb áramnál egyenletesen fog forogni, de így a lépésvesztést kockáztatja az ember, tehát eléggé a határon kell egyensúlyozni ha nincs mozgás visszacsatolás.
Elméletben egy elég okos vezérlő képes lehet erre, de az igazi megoldás mindenképpen a valódi szervókör alkalmazása.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 június 30, 09:34
Írta: keri Dátum 2016 június 30, 09:34
Szerintem egyformák.
Nekem a Longs Motoros vezérlőm van. Annál is van ilyen autotuning.
Nem tudom mit csinál ez pontosan. Szerintem a motor indukciójához igazítja az időzítéseket, ezzel csökkentve a tranzienseket, és javítva a hatékonyságot.
Szóval nem olyan autotuning mint az MSDD vezérlőknél a mozgás optimalizálás.
Ennek ellenére én elégedett vagyok vele. Alap, de elég jó léptető vezérlő szerintem.
Nekem a Longs Motoros vezérlőm van. Annál is van ilyen autotuning.
Nem tudom mit csinál ez pontosan. Szerintem a motor indukciójához igazítja az időzítéseket, ezzel csökkentve a tranzienseket, és javítva a hatékonyságot.
Szóval nem olyan autotuning mint az MSDD vezérlőknél a mozgás optimalizálás.
Ennek ellenére én elégedett vagyok vele. Alap, de elég jó léptető vezérlő szerintem.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 június 30, 09:36
Írta: keri Dátum 2016 június 30, 09:36
Itt van egy ilyen gimbal teszt.
Szerintem elég meggyőző.
Szerintem elég meggyőző.
Cím: Re:Léptetőmotor
Írta: vjanos Dátum 2016 június 30, 10:31
Írta: vjanos Dátum 2016 június 30, 10:31
Kösz, tehát a semminél talán több :)
Nemrég vettem ilyent, de még nem volt alkalmam kipróbálni ezt a metódust...
Egyébként ezeknél mennyire illik menet kötben kapcsolgatni az áram és microstep beállító kapcsolókat?
Nemrég vettem ilyent, de még nem volt alkalmam kipróbálni ezt a metódust...
Egyébként ezeknél mennyire illik menet kötben kapcsolgatni az áram és microstep beállító kapcsolókat?
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 június 30, 13:38
Írta: keri Dátum 2016 június 30, 13:38
Soha nem próbáltam, de szerintem semmi gondot nem okozna, mivel ha jól értelmeztem a panelt, szoftverből kezeli.
Szerintem érdemes ráállítani a motorra.
Szerintem érdemes ráállítani a motorra.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 június 30, 13:49
Írta: keri Dátum 2016 június 30, 13:49
Ja várj, bekapcsolt állapotban már kapcsolgattam én is, motor forgás közben még nem.
Cím: Re:Léptetőmotor
Írta: vjanos Dátum 2016 június 30, 13:53
Írta: vjanos Dátum 2016 június 30, 13:53
Köszi.
Csak mert a DRV-ket ugye kikapcsolva érdemesebb tekergetni, meg a régebbi léptecs vezérlőket is inkább áramtalanítva mókoltam...
Csak mert a DRV-ket ugye kikapcsolva érdemesebb tekergetni, meg a régebbi léptecs vezérlőket is inkább áramtalanítva mókoltam...
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 június 30, 14:31
Írta: keri Dátum 2016 június 30, 14:31
Azoknál az áramkorlátot tekergeted közvetlenül, és főleg a silány potméterek miatt nem érdemes tekergetni üzem közben.
Cím: Re:Léptetőmotor
Írta: 55kv34cjs Dátum 2016 augusztus 12, 20:35
Írta: 55kv34cjs Dátum 2016 augusztus 12, 20:35
Sziasztok
az asztalt bordás szíjak segítségével két léptetőmotor mozgatná. Hogy kellene a motorokat vezérelni? Lehet a két motort párhuzamosan kötni és az egyiknél csak egyszerüen megcsrélni a szálakat, hogy fordítva forogjon?
Arduinóba grbl 0.9j van beégetve a motorokat EasyDriver vezérelné.
az asztalt bordás szíjak segítségével két léptetőmotor mozgatná. Hogy kellene a motorokat vezérelni? Lehet a két motort párhuzamosan kötni és az egyiknél csak egyszerüen megcsrélni a szálakat, hogy fordítva forogjon?
Arduinóba grbl 0.9j van beégetve a motorokat EasyDriver vezérelné.
Cím: Re:Léptetőmotor
Írta: Kisamotors Dátum 2016 augusztus 12, 21:35
Írta: Kisamotors Dátum 2016 augusztus 12, 21:35
Szerintem a legjobb lenne minden motorhoz egy-egy EasyDriver-t tenni úgy, hogy ugyanazokat a step/dir jeleket kapja.
A meghajtó max. 750mA fázisáramot bír (hűtve), az párhuzamosan kötött két motornak kevés lesz.
A meghajtó max. 750mA fázisáramot bír (hűtve), az párhuzamosan kötött két motornak kevés lesz.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 augusztus 12, 21:44
Írta: keri Dátum 2016 augusztus 12, 21:44
Cím: Re:Léptetőmotor
Írta: Kisamotors Dátum 2016 augusztus 12, 21:57
Írta: Kisamotors Dátum 2016 augusztus 12, 21:57
Én ezt használom a kis gépen, 5 motorhoz 5 vezérlő, saját nyákkal, de a kérdés nem ez volt :)
Az Easy-t nem ismerem, bár van belőle valahol pár darab, még ki sem bontottam.
Az Easy-t nem ismerem, bár van belőle valahol pár darab, még ki sem bontottam.
Cím: Re:Léptetőmotor
Írta: 55kv34cjs Dátum 2016 augusztus 13, 07:14
Írta: 55kv34cjs Dátum 2016 augusztus 13, 07:14
köszi a válaszokat
nyomtatóból bontott léptetőmotort használok, alig melegszik az Easy driver. Ezt a cikket olvastam, ezért gondoltam, hogy olcsóbb egy drivert használni két motornak:
gual motor
nyomtatóból bontott léptetőmotort használok, alig melegszik az Easy driver. Ezt a cikket olvastam, ezért gondoltam, hogy olcsóbb egy drivert használni két motornak:
gual motor
Cím: Re:Léptetőmotor
Írta: swghderh5 Dátum 2016 augusztus 15, 11:50
Írta: swghderh5 Dátum 2016 augusztus 15, 11:50
Sziasztok
Kérdésem,hogy létezik Nema 17 vagy 23-s(max 1-1.5A-s) motoroknál olyan kivitel ahol a motor mind két vége meg van azért,hogy egy kézi "tekerőt" tudjak tenni az egyik végére!!!
Kérdésem,hogy létezik Nema 17 vagy 23-s(max 1-1.5A-s) motoroknál olyan kivitel ahol a motor mind két vége meg van azért,hogy egy kézi "tekerőt" tudjak tenni az egyik végére!!!
Cím: Re:Léptetőmotor
Írta: ebalint Dátum 2016 augusztus 15, 15:19
Írta: ebalint Dátum 2016 augusztus 15, 15:19
Cím: Re:Léptetőmotor
Írta: gaben Dátum 2016 augusztus 25, 09:49
Írta: gaben Dátum 2016 augusztus 25, 09:49
A múltkor volt szó fékes léptetőkről amit a Z tengelyhez szánnék. (persze most nem találom)
Tudnátok ajánlani beszerzési forrást, mert egyik ismert weboldalon sem találok. (CNCPart, CNCdrive, Klavio és Variometrum-nál sem)
köszi, Gábor
Tudnátok ajánlani beszerzési forrást, mert egyik ismert weboldalon sem találok. (CNCPart, CNCdrive, Klavio és Variometrum-nál sem)
köszi, Gábor
Cím: Re:Léptetőmotor
Írta: gaben Dátum 2016 augusztus 29, 13:03
Írta: gaben Dátum 2016 augusztus 29, 13:03
Valakinek esetleg ötlete ezzel kapcsolatban?
Köszi
Köszi
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2016 augusztus 29, 13:54
Írta: 4ybj8h3c8 Dátum 2016 augusztus 29, 13:54
ISEL gyártott ilyen fékkel szerelt masinákat. Ha meg tudod oldani nélküle, akkor inkább felejtsd el, nagyon kínlódós.
Szerencsétlen motornak minden lépésnél le kell győznie a fék szorítóerejét, ha meg nem elég szoros akkor meg a saját súlya lehúzza a Z tengelyt.
Szerencsétlen motornak minden lépésnél le kell győznie a fék szorítóerejét, ha meg nem elég szoros akkor meg a saját súlya lehúzza a Z tengelyt.
Cím: Re:Léptetőmotor
Írta: gaben Dátum 2016 augusztus 29, 14:13
Írta: gaben Dátum 2016 augusztus 29, 14:13
Szia,
köszi az infót.
Lesz rajta egy (2 vagy)3:1-es lassító fogasszíjáttétel. Talán az megfogja a Z tengelyt a lezuhanástól.
köszi az infót.
Lesz rajta egy (2 vagy)3:1-es lassító fogasszíjáttétel. Talán az megfogja a Z tengelyt a lezuhanástól.
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2016 augusztus 29, 14:20
Írta: Kristály Árpád Dátum 2016 augusztus 29, 14:20
Halihóóó
Több helyen láttam ilyen ellensúlyos megoldást...
Egy kis szíjtárcsa szerű melyen egy acélsodrony (bovden) van átvíve és rajta van egy ellensúly, melyet kisérlet útján lehet kimérni...[#rolleyes][#rolleyes]
Több helyen láttam ilyen ellensúlyos megoldást...
Egy kis szíjtárcsa szerű melyen egy acélsodrony (bovden) van átvíve és rajta van egy ellensúly, melyet kisérlet útján lehet kimérni...[#rolleyes][#rolleyes]
Cím: Re:Léptetőmotor
Írta: gaben Dátum 2016 augusztus 29, 14:54
Írta: gaben Dátum 2016 augusztus 29, 14:54
Szia Árpád,
na pont ezt szeretném elkerülni, hogy ilyen ellensúlyos megoldást kelljen alkalmaznom.
Egy fix Z hidas megoldásnál még jó is lehet, de én nem olyat tervezek. [#wave]
na pont ezt szeretném elkerülni, hogy ilyen ellensúlyos megoldást kelljen alkalmaznom.
Egy fix Z hidas megoldásnál még jó is lehet, de én nem olyat tervezek. [#wave]
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2016 augusztus 29, 15:54
Írta: 4ybj8h3c8 Dátum 2016 augusztus 29, 15:54
Lassú függőleges mozgásokhoz jó, de relief jellegű akárminél már problémás lehet. Oldalirányba is beleng a súly, nem az igazi. Próbáltam, nem igazán jött be.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2016 augusztus 29, 16:01
Írta: Szalai György Dátum 2016 augusztus 29, 16:01
Ötlet:
Talán, ha bekötnéd a libák bal lábát piros vászonszalaggal, az jó lehetne. Valamire. [#vigyor2]
Minden féle kiszolgált fénymásolóból előtermelhető pár darab elektromos fék, meg kuplung. (http://www.southernpower.com/shinko/shinko.cfm)
Olcsón vagy még olcsóbban hozzáférhető és ráapplikálhatod a golyósorsó nem hajtott végére is, vagy akár a fogasszíjat is fékezheted vele. [#integet2]
Talán, ha bekötnéd a libák bal lábát piros vászonszalaggal, az jó lehetne. Valamire. [#vigyor2]
Minden féle kiszolgált fénymásolóból előtermelhető pár darab elektromos fék, meg kuplung. (http://www.southernpower.com/shinko/shinko.cfm)
Olcsón vagy még olcsóbban hozzáférhető és ráapplikálhatod a golyósorsó nem hajtott végére is, vagy akár a fogasszíjat is fékezheted vele. [#integet2]
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2016 augusztus 29, 16:07
Írta: 4ybj8h3c8 Dátum 2016 augusztus 29, 16:07
Mach3 le tud vezérelni egy ilyet? Ugyi a lépés előtt kell valami jel belőle ami oldja a féket, az utsó lépés után meg zárja.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2016 augusztus 29, 16:15
Írta: Szalai György Dátum 2016 augusztus 29, 16:15
Próbáld ki a helyszinen, és ha nem forgat, akkor alkudjad le ötven forintra, ha már nem tudja, hogy mit árul. (http://www.jofogas.hu/gyor_moson_sopron/Shinko_24V_motor_51456726.htm?first=1)
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2016 augusztus 29, 16:19
Írta: Szalai György Dátum 2016 augusztus 29, 16:19
Na de melyik az utolsó lépés és melyik az első?
Talán a mágnesféket a motorvezérlő kapcsolgatja, nem az interpolátor program. [#nemtudom]
Talán a mágnesféket a motorvezérlő kapcsolgatja, nem az interpolátor program. [#nemtudom]
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 augusztus 29, 16:31
Írta: keri Dátum 2016 augusztus 29, 16:31
Vezérlőkön van egy ENABLE láb. Arra kell kötni a fék vezérlést. Az engedélyezést meg úgy használjuk hogy 5-10másodpercig van engedélyezve a motor, nem halmozódóan minden egyes léptetés után.
Nálam kiválóan működött így a rögzítőfék, és a motor melegedése is jelentősen kisebb.
Nálam kiválóan működött így a rögzítőfék, és a motor melegedése is jelentősen kisebb.
Cím: Re:Léptetőmotor
Írta: gaben Dátum 2016 augusztus 29, 16:43
Írta: gaben Dátum 2016 augusztus 29, 16:43
Szia Keri,
ilyen rögzítőféket hol lehet venni a léptetőkhöz?
Szétkerestem a google-t, de nem leltem rá. Valszeg rossz helyen ill. névvel keresem.
köszi, Gábor [#wave]
ilyen rögzítőféket hol lehet venni a léptetőkhöz?
Szétkerestem a google-t, de nem leltem rá. Valszeg rossz helyen ill. névvel keresem.
köszi, Gábor [#wave]
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2016 augusztus 29, 16:46
Írta: 4ybj8h3c8 Dátum 2016 augusztus 29, 16:46
Erről van szó. Ha a Mach nem küld korrekt ide való jelet akkor lépések tömege jöhet a fékezett motorra, vagy a lépés nélküli motor nincs lefékezve. Bármilyen lépésfigyeléses engedélyezés vagy a vezérlőből kivett jel alkalmatlan korrekt vezérlésre.
Cím: Re:Léptetőmotor
Írta: gaben Dátum 2016 szeptember 10, 21:22
Írta: gaben Dátum 2016 szeptember 10, 21:22
Ezt eddig máshogy olvastam (tapasztalatom nincs), és abban az volt, hogy a rögzítőfék csak abban az esetben kell ha a léptetőmotor nincs feszültség alatt. Ergo: ki van kapcsolva a CNC masina és ebben az esetben kell megakadályozni, hogy a "Z" tengely ne csorogjon le az asztalba.
Ha be van kapcsolva a gép, akkor meg a motorvezérlő tartóárama az, ami megtartja a Z tengelyt.
Jól gondolom? [#fejvakaras]
ui: Keri pedig még a motorvezérlőn is segített azzal, hogy "beprogramozta" az engedélyező lábon kiadott jelet, ami a valszeg egy relén keresztül kapcsolja a féket, megfelelő időközökben. Így a tartóáramot is jóval kisebbre vehette a szünetek között.
Ha be van kapcsolva a gép, akkor meg a motorvezérlő tartóárama az, ami megtartja a Z tengelyt.
Jól gondolom? [#fejvakaras]
ui: Keri pedig még a motorvezérlőn is segített azzal, hogy "beprogramozta" az engedélyező lábon kiadott jelet, ami a valszeg egy relén keresztül kapcsolja a féket, megfelelő időközökben. Így a tartóáramot is jóval kisebbre vehette a szünetek között.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2016 szeptember 10, 21:38
Írta: ANTAL GÁBOR Dátum 2016 szeptember 10, 21:38
Nekem van egy gyári (Isel ) gépem .Annál van fék a léptetőn ( árammentes esetben a rugó fékezi a motort ) Amikor bekapcsolom akkor kattan egy jól hallhatót és old a fék DE belép a tartóáram és az fogja a motort . Lehet dolgozni . Egy bibi azért van : másnap bekapcsolva a gépet nem ott lesz ahol befejeztük a munkát ( a fék oldás és a tartóáram kialakulás között eltelik egy kis idő ami alatt egy picit érvényesül a gravitáció ) Az is lehet hogy amikor "szűzen " megkapja a tartóáramot akkor egy kicsit fordul a motor . Gyakorlati jelentősége nincsen .
Cím: Re:Léptetőmotor
Írta: gaben Dátum 2016 szeptember 11, 09:09
Írta: gaben Dátum 2016 szeptember 11, 09:09
Szia Gábor,
közben nekem is sikerült vennem egy fékes léptetőmotort, szóval halad az ügy. [#wave]
A féket kipróbáltam és igen ugyanez a kattanó hang jelzi a fék oldását.
Amúgy is áttételezve tervezem a beépítését.
közben nekem is sikerült vennem egy fékes léptetőmotort, szóval halad az ügy. [#wave]
A féket kipróbáltam és igen ugyanez a kattanó hang jelzi a fék oldását.
Amúgy is áttételezve tervezem a beépítését.
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2016 szeptember 12, 16:19
Írta: 4ybj8h3c8 Dátum 2016 szeptember 12, 16:19
Jól gondolod, de nálam speciel az eggyel feletted írt ugyancsak ISEL rendszerben nem volt bekötve a fék.
Bekötve sem működött, csak felesleges súly volt az amúgy is 25 kiló fölötti Z tengelyen.
Bekötve sem működött, csak felesleges súly volt az amúgy is 25 kiló fölötti Z tengelyen.
Cím: Re:Léptetőmotor
Írta: 4u88hx8j6 Dátum 2016 szeptember 17, 16:23
Írta: 4u88hx8j6 Dátum 2016 szeptember 17, 16:23
A találkozón felhívták a figyelmemet hogy túlságosan melegednek a léptető motorok. Azt szeretném megkérdezni mi lenne az optimális beállítás?
Jelenleg : motor tápfeszültség: 46V (42V)
motor áram erősség: Rms 2.41A
motor bekötés: bipoláris párhuzamos
(http://cnctar.hobbycnc.hu/Csike/egy%C3%A9b/SAM_0946.JPG)
(http://cnctar.hobbycnc.hu/Csike/egy%C3%A9b/SAM_0947.JPG)
léptető motor (http://www.cncpart.hu/elektronika/leptetomotor/leptetomotor233128)
Jelenleg : motor tápfeszültség: 46V (42V)
motor áram erősség: Rms 2.41A
motor bekötés: bipoláris párhuzamos
(http://cnctar.hobbycnc.hu/Csike/egy%C3%A9b/SAM_0946.JPG)
(http://cnctar.hobbycnc.hu/Csike/egy%C3%A9b/SAM_0947.JPG)
léptető motor (http://www.cncpart.hu/elektronika/leptetomotor/leptetomotor233128)
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2016 szeptember 17, 19:32
Írta: jani300 Dátum 2016 szeptember 17, 19:32
Ez egy négytengelyes motorvezérlő ?
Később rákeresek , érdekes .
Később rákeresek , érdekes .
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2016 szeptember 17, 19:33
Írta: jani300 Dátum 2016 szeptember 17, 19:33
Mondjuk oda van írva hogy 3 ...
De az adatait néztem ...[#fejvakaras]
De az adatait néztem ...[#fejvakaras]
Cím: Re:Léptetőmotor
Írta: ca6ehk3nt Dátum 2016 szeptember 19, 11:35
Írta: ca6ehk3nt Dátum 2016 szeptember 19, 11:35
Sziaszok!
Volt valakinek dolga 9-vezetékes Responsyn léptető motorral?
Az adattáblán szerepelő adatok:
HDM 155-2000-8 / 9 Ohm / 2000 step /fordulat.
A neten semmi infót nem találok. Tud valaki segíteni hogy tudnám működésre szeretném bírni? (http://kepfeltoltes.hu/view/160919/responsyn_motor_www.kepfeltoltes.hu_.jpg)
Volt valakinek dolga 9-vezetékes Responsyn léptető motorral?
Az adattáblán szerepelő adatok:
HDM 155-2000-8 / 9 Ohm / 2000 step /fordulat.
A neten semmi infót nem találok. Tud valaki segíteni hogy tudnám működésre szeretném bírni? (http://kepfeltoltes.hu/view/160919/responsyn_motor_www.kepfeltoltes.hu_.jpg)
Cím: Re:Léptetőmotor
Írta: ca6ehk3nt Dátum 2016 szeptember 19, 11:37
Írta: ca6ehk3nt Dátum 2016 szeptember 19, 11:37
responsyn motor (http://kepfeltoltes.hu/view/160919/responsyn_motor_www.kepfeltoltes.hu_.jpg)
Cím: Re:Léptetőmotor
Írta: iv43r83d Dátum 2016 szeptember 19, 19:55
Írta: iv43r83d Dátum 2016 szeptember 19, 19:55
Szép estét mindenkinek!Épülő fém marógépemhez léptetőmotor választásban szeretném kérni a segítségeteket Z tengely 20Kg, mozgatása líneáris vezeték+20x5-ös golyósorsó X-y mozgatás szintén ez csak az X 45Kg Y 50Kg milyen motorokat kellene vásárolni ne szeretnék mellé fogni!Előre is köszönöm! Üdv Csaba!
Cím: Re:Léptetőmotor
Írta: svager Dátum 2016 szeptember 20, 19:19
Írta: svager Dátum 2016 szeptember 20, 19:19
Szia
Ez még nagyon kevés információ,hogy tanácsot adjon valaki.
Szerintem 4NM-es motornál nem szükséges nagyobb,áttétel nélkül is használhatod. Könnyedén megbirkóznak ekkora tömeggel.
Ez még nagyon kevés információ,hogy tanácsot adjon valaki.
Szerintem 4NM-es motornál nem szükséges nagyobb,áttétel nélkül is használhatod. Könnyedén megbirkóznak ekkora tömeggel.
Cím: Re:Léptetőmotor
Írta: iv43r83d Dátum 2016 szeptember 20, 20:01
Írta: iv43r83d Dátum 2016 szeptember 20, 20:01
Szia!Köszönöm hogy időt szántál rám!Milyen információ hiányra gondolsz még? Üdv Csaba!
Cím: Re:Léptetőmotor
Írta: svager Dátum 2016 szeptember 20, 21:17
Írta: svager Dátum 2016 szeptember 20, 21:17
Mekkora a gép munkaterülete,mekkora sebességet szeretnél,ha kicsi a munkaterület,vagy nem akarsz nagy üresjárati sebességet(az anyagban meg nem kell)akár kisebb motorokat is rakhatsz leáttételezve.
Egyébként mit jelent a fém?
Egyébként mit jelent a fém?
Cím: Re:Léptetőmotor
Írta: iv43r83d Dátum 2016 szeptember 20, 21:28
Írta: iv43r83d Dátum 2016 szeptember 20, 21:28
Y300 X500 Z500 üresjárati sebesség 2000mm/min-re gondoltam bocsánat fém helyett vas.
Cím: Re:Léptetőmotor
Írta: Kisamotors Dátum 2016 szeptember 20, 21:42
Írta: Kisamotors Dátum 2016 szeptember 20, 21:42
Z 500mm út? Elírás?
Cím: Re:Léptetőmotor
Írta: iv43r83d Dátum 2016 szeptember 20, 21:46
Írta: iv43r83d Dátum 2016 szeptember 20, 21:46
Nem elírás.
Cím: Re:Léptetőmotor
Írta: iv43r83d Dátum 2016 szeptember 20, 21:56
Írta: iv43r83d Dátum 2016 szeptember 20, 21:56
Mégis elírás.
Cím: Re:Léptetőmotor
Írta: guliver83 Dátum 2016 szeptember 20, 21:58
Írta: guliver83 Dátum 2016 szeptember 20, 21:58
[#taps]
Cím: Re:Léptetőmotor
Írta: r5y7cufaj Dátum 2016 október 23, 18:38
Írta: r5y7cufaj Dátum 2016 október 23, 18:38
Sziasztok!
Ha klónozni szeretnék egy tengelyt, akkor azt, hogy kell megoldani, hogy csináljátok?
A leválasztóból clk-t cw-t enable-t osszam ketté és kössem be a két motorvezérlőbe?
Köszi!
Ha klónozni szeretnék egy tengelyt, akkor azt, hogy kell megoldani, hogy csináljátok?
A leválasztóból clk-t cw-t enable-t osszam ketté és kössem be a két motorvezérlőbe?
Köszi!
Cím: Re:Léptetőmotor
Írta: gaben Dátum 2016 október 24, 09:36
Írta: gaben Dátum 2016 október 24, 09:36
Szia,
ez engem is érdekel. Egyáltalán lehet pontosan beállítani a két léptetőmotort, hogy az "X" tengelyt tökéletesen vigye?
ez engem is érdekel. Egyáltalán lehet pontosan beállítani a két léptetőmotort, hogy az "X" tengelyt tökéletesen vigye?
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 október 24, 10:00
Írta: keri Dátum 2016 október 24, 10:00
Igen.
Ez a legjobb megoldás.
De olcsósításnál, hobbi kategóriába belefér az is ha a motorokat kötöd párhuzamosan. Természetesen egyforma motorok kellenek, a motor áramok összeadódnak, illetve figyelembe kell venni, hogy adódhatnak problémák, de azért használják ezt a megoldást is.
Ez a legjobb megoldás.
De olcsósításnál, hobbi kategóriába belefér az is ha a motorokat kötöd párhuzamosan. Természetesen egyforma motorok kellenek, a motor áramok összeadódnak, illetve figyelembe kell venni, hogy adódhatnak problémák, de azért használják ezt a megoldást is.
Cím: Re:Léptetőmotor
Írta: r5y7cufaj Dátum 2016 október 24, 13:29
Írta: r5y7cufaj Dátum 2016 október 24, 13:29
Köszi!
Cím: Re:Léptetőmotor
Írta: 2f428kduf Dátum 2016 október 24, 16:07
Írta: 2f428kduf Dátum 2016 október 24, 16:07
Mégegy meghajtó-elektronika, ugyanazzal a jellel??
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2016 október 24, 16:17
Írta: PSoft Dátum 2016 október 24, 16:17
Nem tudom milyen gép, milyen mechanika, mik a lehetőségek...[#nemtudom]
De, az "ősi" módszernél, nincs biztosabb. (http://cnctar.hobbycnc.hu/PSoft/50W_CO2_laser/mechanika/):)
Itt, nem mászik el a szinkron.
De, az "ősi" módszernél, nincs biztosabb. (http://cnctar.hobbycnc.hu/PSoft/50W_CO2_laser/mechanika/):)
Itt, nem mászik el a szinkron.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 október 24, 17:05
Írta: keri Dátum 2016 október 24, 17:05
Persze. Működik pár ilyen gép itt.
De mint mondtam, ha a meghajtó bírja a dupla motor áramot, akkor lehet egyre is tenni, csak teszteld az éles alkalmazás előtt, mert a motor ellenállás és reaktancia is feleződik, amit nem biztos hogy szeret a meghajtó.
De mint mondtam, ha a meghajtó bírja a dupla motor áramot, akkor lehet egyre is tenni, csak teszteld az éles alkalmazás előtt, mert a motor ellenállás és reaktancia is feleződik, amit nem biztos hogy szeret a meghajtó.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 október 24, 17:06
Írta: keri Dátum 2016 október 24, 17:06
Amúgy, igen. Ez a legjobb...vagy szíjjal összekötni, és akkor nincs gond, csak nem ezt kérdezték.
Cím: Re:Léptetőmotor
Írta: r5y7cufaj Dátum 2016 október 24, 19:15
Írta: r5y7cufaj Dátum 2016 október 24, 19:15
Én így terveztem, nem pedig egy motorvezérlőre kötve.
(http://users.atw.hu/dono/dupla%20motor%20vezerles.jpg) (http://users.atw.hu/dono/dupla%20motor%20vezerles.jpg)
(http://users.atw.hu/dono/dupla%20motor%20vezerles.jpg) (http://users.atw.hu/dono/dupla%20motor%20vezerles.jpg)
Cím: Re:Léptetőmotor
Írta: r5y7cufaj Dátum 2016 október 24, 19:18
Írta: r5y7cufaj Dátum 2016 október 24, 19:18
A negatívot (enable-t) nem rajzoltam be! Mielőtt valaki csak jóindulatból leba**na.
Cím: Re:Léptetőmotor
Írta: r5y7cufaj Dátum 2016 október 24, 19:24
Írta: r5y7cufaj Dátum 2016 október 24, 19:24
Az a baj, hogy az "ősi" módszert azért nem szeretném használni, mert jelen esetben a szíj az fixen van kifeszítve és a bordáskerék (helyesen fogazott tárcsa) mozog a motorral.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 október 24, 20:35
Írta: keri Dátum 2016 október 24, 20:35
Optocsatoló a kimeneten, bemeneten, így a szintekkel sem lesz tuti gond, meg hurok sem tud kialakulni.
Én is így tervezem a lézerhez megoldani. A híd két végére rakott motorral, omega hajtással. Bár végül is mehet tengely a híd hosszában, csak félek túl nehéz.
Én is így tervezem a lézerhez megoldani. A híd két végére rakott motorral, omega hajtással. Bár végül is mehet tengely a híd hosszában, csak félek túl nehéz.
Cím: Re:Léptetőmotor
Írta: r5y7cufaj Dátum 2016 október 28, 10:37
Írta: r5y7cufaj Dátum 2016 október 28, 10:37
Sziasztok!
Már rég óta meg akarom kérdezni.
Ha megy a gép és bekapcsolok egy "nagy fogyasztót (pl porszívót) akkor tévesztet a gép. Mitől van ez?
(Gondolom le kellene árnyékolni a vezérlő dobozát)
Köszi!
Már rég óta meg akarom kérdezni.
Ha megy a gép és bekapcsolok egy "nagy fogyasztót (pl porszívót) akkor tévesztet a gép. Mitől van ez?
(Gondolom le kellene árnyékolni a vezérlő dobozát)
Köszi!
Cím: Re:Léptetőmotor
Írta: svager Dátum 2016 október 28, 12:14
Írta: svager Dátum 2016 október 28, 12:14
Ugyanabban az aljzatba van budugva a porszívó amibe a vezérlő van?
Már nálam is volt ilyen amikor a kompresszor elindult.
Amióta másik aljzatba van,nem jelentkezett,gondolom elinduláskor nagy volt az áramfelvétel és ez kavart be.
Már nálam is volt ilyen amikor a kompresszor elindult.
Amióta másik aljzatba van,nem jelentkezett,gondolom elinduláskor nagy volt az áramfelvétel és ez kavart be.
Cím: Re:Léptetőmotor
Írta: r5y7cufaj Dátum 2016 október 28, 12:23
Írta: r5y7cufaj Dátum 2016 október 28, 12:23
Nem ugyan az az ajzat, de szerintem egy körön van.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 október 28, 13:05
Írta: keri Dátum 2016 október 28, 13:05
Megszüntetni a hurkokat a rendszerben, hibatűrő jelátvitel (optocsatolt, és/vagy bemeneti szűrő, ezek a gyári vezérlőkön megvan általában), rövid jelvezetékek, árnyékolt/sodort/szimmetrikus átvitelű jel vezetékek, hálózati zavarszűrés, ilyesmi.
nekem pl véletlenül a léptető vezetéke mellet ment a printerkábel, és az okozott némi zavart, de ha csak merőlegesen megy rá akkor már nincs gond, a printerkábelen elvágtam az egyik oldalon az árnyékolást, az is sokat javított a dolgon, illetve nekem saját építésű, és leválasztó nélküli vezérlőm volt, sima 1K-s ellenállás volt csak a zavarszűrés.
Másik hogy én eleve csak zavarszűrős aljzatokat szoktam a gépeimbe beépíteni. Kompresszor ugyan azon a dróton nekem nem kavar be.
Az esztergám és a 3D nyomtatóm teljesen érzéketlenek már az ilyen zavarokra a fenti dolgok figyelembe vételével.
nekem pl véletlenül a léptető vezetéke mellet ment a printerkábel, és az okozott némi zavart, de ha csak merőlegesen megy rá akkor már nincs gond, a printerkábelen elvágtam az egyik oldalon az árnyékolást, az is sokat javított a dolgon, illetve nekem saját építésű, és leválasztó nélküli vezérlőm volt, sima 1K-s ellenállás volt csak a zavarszűrés.
Másik hogy én eleve csak zavarszűrős aljzatokat szoktam a gépeimbe beépíteni. Kompresszor ugyan azon a dróton nekem nem kavar be.
Az esztergám és a 3D nyomtatóm teljesen érzéketlenek már az ilyen zavarokra a fenti dolgok figyelembe vételével.
Cím: Re:Léptetőmotor
Írta: sastas Dátum 2016 október 28, 14:14
Írta: sastas Dátum 2016 október 28, 14:14
Alapvetően az a baj, hogy az erős induktív fogyasztó induláskor a lakásod rendszerébe beenged egy impulzust(lásd heggesztőtrafó-hagyományos lámpaizzó), és ez az impulzus megzavarja a vezérlődet. Megfelelő zavarszűrés+nagy pufferkondi a tápon általában megoldja.
Cím: Re:Léptetőmotor
Írta: r5y7cufaj Dátum 2016 október 28, 15:55
Írta: r5y7cufaj Dátum 2016 október 28, 15:55
Köszi!
Ezt már más is ajánlotta, akkor ezzel kezdem.
Ezt már más is ajánlotta, akkor ezzel kezdem.
Cím: Re:Léptetőmotor
Írta: fpd0kbd4 Dátum 2016 november 01, 08:00
Írta: fpd0kbd4 Dátum 2016 november 01, 08:00
Fölleltem egy Berger-Lahr VRDM 3910/50LWB 3fázisú léptetőmotort.Az eredeti környezetéből arra gondolok,vezérlő nélkül üzemeltették.Ilyen adatokat találtam róla:230VAC,325VDC
Eredeti vezérlő beszerzését föladtam.A kérdésem az lenne, forgásra, valamilyen szintű üzemelésre fogható ez egy frekiváltóval,mint mondjuk szinkron motor?
itt egy pár adat róla (http://www.icare.cnrs-orleans.fr/IMG/pdf/gdr_pivoine/systemededeplacement/translateuravecbalancemoteur/moteur-vrdm39.pdf)
Eredeti vezérlő beszerzését föladtam.A kérdésem az lenne, forgásra, valamilyen szintű üzemelésre fogható ez egy frekiváltóval,mint mondjuk szinkron motor?
itt egy pár adat róla (http://www.icare.cnrs-orleans.fr/IMG/pdf/gdr_pivoine/systemededeplacement/translateuravecbalancemoteur/moteur-vrdm39.pdf)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2016 november 01, 08:28
Írta: svejk Dátum 2016 november 01, 08:28
Meg lehetne találni egy feszültség munkapontot amin szépen menne, de alapjában a mezei frekiváltók nem szeretik a szinkron motorokat. (akár füst is lehet belőle)
A vectorosoknál általában engedélyezett üzemmód, de én béna voltam mindig hozzájuk.
A vectorosoknál általában engedélyezett üzemmód, de én béna voltam mindig hozzájuk.
Cím: Re:Léptetőmotor
Írta: fpd0kbd4 Dátum 2016 november 01, 08:56
Írta: fpd0kbd4 Dátum 2016 november 01, 08:56
A füst eredetére a motorból vagy a frekiváltóból kell számolni? Van egy muzeális csavarhúzós hangolású frekiváltóm.Talán azzal megpróbálni? De jó lenne valamit tudni,hogy milyen kotta szerint.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2016 november 01, 09:35
Írta: svejk Dátum 2016 november 01, 09:35
a frekiváltóból...
a mágnes miatt nagyokat visrosszúg.
az U/f karakterisztikát kellene jól beállítani
a mágnes miatt nagyokat visrosszúg.
az U/f karakterisztikát kellene jól beállítani
Cím: Re:Léptetőmotor
Írta: fpd0kbd4 Dátum 2016 november 01, 09:40
Írta: fpd0kbd4 Dátum 2016 november 01, 09:40
Köszi. Megpróbálok először rágyúrni elméletben.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2016 november 01, 09:47
Írta: svejk Dátum 2016 november 01, 09:47
Olcsóbb mint a füst. :)
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 november 01, 12:53
Írta: keri Dátum 2016 november 01, 12:53
Mi a célod? Egy szenzor nélküli BLDC meghajtó viszi ezeket a motorokat.
Cím: Re:Léptetőmotor
Írta: fpd0kbd4 Dátum 2016 november 01, 13:12
Írta: fpd0kbd4 Dátum 2016 november 01, 13:12
Eredeti vezérlő nélkül gondolom a reális cél csak az lehet, hogy forogjon.BLDC meghajtó létezik olyan, ami ennek a motornak a feszültség, áramerősség igényén, tud működni?
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 november 01, 17:15
Írta: keri Dátum 2016 november 01, 17:15
Sajnos ilyen feszültségűt nem találtam, de nekem már 30V-ról (ennyi volt kéznél) is kellemes nyomatékot adott le egy régi 200V-os AC szervó.
50V-os Modellhez való motorvezérlő. (http://www.ebay.com/itm/AX-AE-HV70A-Brushless-ESC-Speed-Controller-5-12S-w-Heat-Sink-fr-RC-Multicopters-/262268828682?hash=item3d1070bc0a:g:OIwAAOSw-kdXzQ64)
Sajnos a CNC-s cuccok között, a kínaiaknál csak szenzoros vezérlőket találtam.
Elektromos járművekhez való (http://tech-mobile.hu/termekek-motorvezerlo-bldc.php) BLDC vezérlőknél is csak 72V-osat találtam, de 48V az általános, úgy látom.
Ráadásul ezek drágák, és oda kell figyelni, mert nem mindegyik tudja a szenzormentes üzemet.
50V-os Modellhez való motorvezérlő. (http://www.ebay.com/itm/AX-AE-HV70A-Brushless-ESC-Speed-Controller-5-12S-w-Heat-Sink-fr-RC-Multicopters-/262268828682?hash=item3d1070bc0a:g:OIwAAOSw-kdXzQ64)
Sajnos a CNC-s cuccok között, a kínaiaknál csak szenzoros vezérlőket találtam.
Elektromos járművekhez való (http://tech-mobile.hu/termekek-motorvezerlo-bldc.php) BLDC vezérlőknél is csak 72V-osat találtam, de 48V az általános, úgy látom.
Ráadásul ezek drágák, és oda kell figyelni, mert nem mindegyik tudja a szenzormentes üzemet.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 november 01, 17:22
Írta: keri Dátum 2016 november 01, 17:22
Esetleg ez 90V-os (http://www.ebay.com/itm/VXP-Racing-High-Power-Voltage-100A-ESC-3-22S-LiPo-1-8-1-5-Car-On-Off-Road-/171388358525?hash=item27e78acf7d:g:kjEAAOSwGzlTxloo)
de sajnos ezek már mind durván nagy áramúak és ezért drágák...mondjuk tartós üzemben a felével kényelmesen mennek, mert ezek 5-20percet szoktak egyszerre üzemelni, de neked nem is kell 10Ampernál több.
de sajnos ezek már mind durván nagy áramúak és ezért drágák...mondjuk tartós üzemben a felével kényelmesen mennek, mert ezek 5-20percet szoktak egyszerre üzemelni, de neked nem is kell 10Ampernál több.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2016 november 01, 17:24
Írta: keri Dátum 2016 november 01, 17:24
Ja még annyit hogy ha közelemben jársz akkor ki tudjuk próbálni. Bp. 18. kerületben lakok.
Cím: Re:Léptetőmotor
Írta: fpd0kbd4 Dátum 2016 november 01, 18:39
Írta: fpd0kbd4 Dátum 2016 november 01, 18:39
Köszi a fölajánlott lehetőséget,de nem valószínű hogy tudok vele élni.Ár érték arányban ez a BLDC meghajtó is felejtős, ugyan úgy mint egy eredeti vezérlő, piaci áron.A frekiváltóval próbálkozást még nem adom föl egyenlőre.
Cím: Re:Léptetőmotor
Írta: 3z3fhyubr Dátum 2016 november 26, 10:31
Írta: 3z3fhyubr Dátum 2016 november 26, 10:31
hello! nincs esetleg eladó valakinek egy d550-rs vezérlője.
Cím: Re:Léptetőmotor
Írta: Kelepeisz Lajos Dátum 2016 december 21, 21:16
Írta: Kelepeisz Lajos Dátum 2016 december 21, 21:16
Uraim!
Lenne itt egy anomália, amit meg nem tudok érteni, van nekem egy Sonceboz 8660R033-as léptető motorom, feketén fehéren ez a szám áll az adattáblán, de az ég világon sehol nem találok róla leírás, a 8660R030-ról még van és ennyi.
Nincs valakinek ötlete hogy miért nem találok róla semmit?
Lenne itt egy anomália, amit meg nem tudok érteni, van nekem egy Sonceboz 8660R033-as léptető motorom, feketén fehéren ez a szám áll az adattáblán, de az ég világon sehol nem találok róla leírás, a 8660R030-ról még van és ennyi.
Nincs valakinek ötlete hogy miért nem találok róla semmit?
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2016 december 21, 22:20
Írta: s5f8tmfv3 Dátum 2016 december 21, 22:20
Előfordulhat hogy nem kereskedelmi céllal készült, hanem valamilyen cégnek a célgépébe. Ezért nincs nyilvános adatlap.
Cím: Re:Léptetőmotor
Írta: Peppe Dátum 2017 január 27, 19:43
Írta: Peppe Dátum 2017 január 27, 19:43
Üdvözlet Mindenkinek,
Érdeklődnék a TB6600 motormeghajtókat érdemes használni?
Vagy vannak problémák amit el lehet hárítani és utána már megbízható?
Ezt szemeltem ki:
http://www.ebay.com/itm/1-x-CNC-Single-Axis-4A-TB6600-2-4-Phase-Hybrid-Stepper-Motor-Driver-Controller/142040039768?_trksid=p2141725.c100338.m3726&_trkparms=aid%3D222007%26algo%3DSIC.MBE%26ao%3D1%26asc%3D20150313114020%26meid%3D119315d54bb04b508b04db9208e5294d%26pid%3D100338%26rk%3D1%26rkt%3D20%26sd%3D311565211791
Köszönöm a válaszokat.
Peppe
Érdeklődnék a TB6600 motormeghajtókat érdemes használni?
Vagy vannak problémák amit el lehet hárítani és utána már megbízható?
Ezt szemeltem ki:
http://www.ebay.com/itm/1-x-CNC-Single-Axis-4A-TB6600-2-4-Phase-Hybrid-Stepper-Motor-Driver-Controller/142040039768?_trksid=p2141725.c100338.m3726&_trkparms=aid%3D222007%26algo%3DSIC.MBE%26ao%3D1%26asc%3D20150313114020%26meid%3D119315d54bb04b508b04db9208e5294d%26pid%3D100338%26rk%3D1%26rkt%3D20%26sd%3D311565211791
Köszönöm a válaszokat.
Peppe
Cím: Re:Léptetőmotor
Írta: Varga Ferenc Dátum 2017 január 28, 08:42
Írta: Varga Ferenc Dátum 2017 január 28, 08:42
Igen.
Kifogástalan.
Kifogástalan.
Cím: Re:Léptetőmotor
Írta: kaqkk007 Dátum 2017 január 28, 09:04
Írta: kaqkk007 Dátum 2017 január 28, 09:04
Szerintem jók a 6600 as meghajtók , nálam már kb másfél éve hibátlanul mennek (előtte 6550 esek voltak azokról ezt nem tudom elmondani)
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 január 28, 09:44
Írta: 4ybj8h3c8 Dátum 2017 január 28, 09:44
Saját tapasztalat:
Két amperes motort L297-298 felcsapó lánggal jutalmazott.
TB6560 vitte ugyan de sebességet nem bírt.
TB6600 tökéletesen működik.
Sosem árt ha bőven van tartalék.
Két amperes motort L297-298 felcsapó lánggal jutalmazott.
TB6560 vitte ugyan de sebességet nem bírt.
TB6600 tökéletesen működik.
Sosem árt ha bőven van tartalék.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2017 január 28, 09:49
Írta: PSoft Dátum 2017 január 28, 09:49
Nekem ugyan nincs saját tapasztalat, de...
Visszaolvasva/visszaemlékezve, a fórumtársak írásai alapján jók a tapasztalatok a TB6600-val épített meghajtókkal kapcsolatban.
Visszaolvasva/visszaemlékezve, a fórumtársak írásai alapján jók a tapasztalatok a TB6600-val épített meghajtókkal kapcsolatban.
Cím: Re:Léptetőmotor
Írta: Peppe Dátum 2017 január 28, 19:35
Írta: Peppe Dátum 2017 január 28, 19:35
Köszönöm a tapasztalatokat.
Most építem a gépem és vásárolgatok hozzá dolgokat.
TB6600 elég olcsó. És furcsa hogy ennyire megbízható.
Most építem a gépem és vásárolgatok hozzá dolgokat.
TB6600 elég olcsó. És furcsa hogy ennyire megbízható.
Cím: Re:Léptetőmotor
Írta: szf Dátum 2017 február 03, 17:51
Írta: szf Dátum 2017 február 03, 17:51
Ilyen motorokhoz keresek vezérlőt.
Tudtok valamit ajànlani?
Köszönöm

Tudtok valamit ajànlani?
Köszönöm

Cím: Re:Léptetőmotor
Írta: z2a2u8wf Dátum 2017 február 03, 18:00
Írta: z2a2u8wf Dátum 2017 február 03, 18:00
Kevés pénzből a tb6600.
Kicsit többért dm542.
Kicsit többért dm542.
Cím: Re:Léptetőmotor
Írta: szf Dátum 2017 február 03, 18:11
Írta: szf Dátum 2017 február 03, 18:11
nem kellene túl méretezni?
vagy ennyi elégséges?
vagy ennyi elégséges?
Cím: Re:Léptetőmotor
Írta: z2a2u8wf Dátum 2017 február 03, 18:26
Írta: z2a2u8wf Dátum 2017 február 03, 18:26
Én dm542 vezérlőt vennék egy 36v 10A-es tappal. Ez nema23 motorok ha jól látom. Ezeknek szerintem ez maximálisan megfelelő.
Cím: Re:Léptetőmotor
Írta: z2a2u8wf Dátum 2017 február 03, 18:28
Írta: z2a2u8wf Dátum 2017 február 03, 18:28
Esetleg egy 48v 15A-es tápot megerne.
Mit mozgatna?
Mit mozgatna?
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2017 február 03, 18:43
Írta: zozo Dátum 2017 február 03, 18:43
Miért is? Biztosan nem akar ebből a motorból 50 db-ot hajtani egyszerre.
Cím: Re:Léptetőmotor
Írta: szf Dátum 2017 február 03, 18:44
Írta: szf Dátum 2017 február 03, 18:44
Egy gépet újítok fel és azon egy kisebb hidat.kb80kg.ez a motor volt fent eredetileg.de majd holnap lefényképezett....
Cím: Re:Léptetőmotor
Írta: z2a2u8wf Dátum 2017 február 03, 18:47
Írta: z2a2u8wf Dátum 2017 február 03, 18:47
A klavio azt ajánlja 10-15szörös feszültség kell a motornak mint ami rá van írva. A 3 motor ha egyszerre megy akkor 3*4ampert vesz fel. Szerintem.
Cím: Re:Léptetőmotor
Írta: z2a2u8wf Dátum 2017 február 03, 18:55
Írta: z2a2u8wf Dátum 2017 február 03, 18:55
3volt szorozva 10-15 az 30-45volt. ezért ajánlottam a minimum32 inkább a 48voltos tápot. a 3x4amper meg 12 amper.
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2017 február 03, 18:59
Írta: zozo Dátum 2017 február 03, 18:59
Az a 48V 15A-es táp a legextrémebb körülmények közt is bírna 25 ilyen motorral. Erre mondtam, hogy felesleges ilyen drága nagy teljesítményű táp.
Cím: Re:Léptetőmotor
Írta: z2a2u8wf Dátum 2017 február 03, 19:10
Írta: z2a2u8wf Dátum 2017 február 03, 19:10
szerintem 10-15ezer forint nem sok egy tápért.
táp (http://www.ebay.com/itm/AC-110V-220V-TO-DC-5V-12V-24V-48V-Switch-Power-Supply-Driver-Adapter-Transformer-/222347985178?var=&hash=item33c4f9011a:m:mhRvRH6EljKZS7OxW7KG-5Q)
táp (http://www.ebay.com/itm/AC-110V-220V-TO-DC-5V-12V-24V-48V-Switch-Power-Supply-Driver-Adapter-Transformer-/222347985178?var=&hash=item33c4f9011a:m:mhRvRH6EljKZS7OxW7KG-5Q)
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2017 február 03, 19:12
Írta: zozo Dátum 2017 február 03, 19:12
" 3x4amper meg 12 amper."
Az csak 3V mellett 4A (fázis áram, egyik tekercsen)
48V esetén majdnem arányosan csökken.
De ez gyakorlatban más, mert két tekercs is kaphat egyszerre áramot, no meg lehet, hogy még ezt is szorozni kell 1.4-el. Akkor is csak kb. 34W a maximum, amit fel bír zabálni. Ez kevesebb mint 1A áram.
A 48v/15A táp pedig 720W. Tehát több mint 20-szoros túlméretezés táp tekintetében.
Az csak 3V mellett 4A (fázis áram, egyik tekercsen)
48V esetén majdnem arányosan csökken.
De ez gyakorlatban más, mert két tekercs is kaphat egyszerre áramot, no meg lehet, hogy még ezt is szorozni kell 1.4-el. Akkor is csak kb. 34W a maximum, amit fel bír zabálni. Ez kevesebb mint 1A áram.
A 48v/15A táp pedig 720W. Tehát több mint 20-szoros túlméretezés táp tekintetében.
Cím: Re:Léptetőmotor
Írta: szf Dátum 2017 február 03, 19:27
Írta: szf Dátum 2017 február 03, 19:27
tápot nem veszek van egy 400/50V 550VA-os trafóm .szerintem megoldja a feladatott.csak úgy gondolom, hogy alul méretezettek a motorok de mielőtt cserélek ki akarom próbálni. (valakinek a vezérlőjével)
Cím: Re:Léptetőmotor
Írta: z2a2u8wf Dátum 2017 február 03, 19:36
Írta: z2a2u8wf Dátum 2017 február 03, 19:36
egyszer szivesen kipróbálnék egy mechanikát olyan felálásban hogy a motorok 3V 4A, a vezérlők pedig dm542.
először rátennék egy 48V 10A-es tápoz. Felhúznám a maximum telljesítményre amit a motorok és a mechanika lépésvesztés nélkül folyamatosan üzemben bírnak úgy hogy mindhárom tengely egyszerre megy. Minimum 3órás G-kódot lefuttatnám. utánna beállítások megtartásával rátennék egy 24V 4A-es tápot és megint elindítanám.
Vajon lenne különbség bármiben?
először rátennék egy 48V 10A-es tápoz. Felhúznám a maximum telljesítményre amit a motorok és a mechanika lépésvesztés nélkül folyamatosan üzemben bírnak úgy hogy mindhárom tengely egyszerre megy. Minimum 3órás G-kódot lefuttatnám. utánna beállítások megtartásával rátennék egy 24V 4A-es tápot és megint elindítanám.
Vajon lenne különbség bármiben?
Cím: Re:Léptetőmotor
Írta: szf Dátum 2017 február 03, 19:38
Írta: szf Dátum 2017 február 03, 19:38
ezek szerint a cncdrive-től megfelel a "M545D" is.
Cím: Re:Léptetőmotor
Írta: szf Dátum 2017 február 03, 19:45
Írta: szf Dátum 2017 február 03, 19:45
majd,ha karácsonyra összerakom a szerkezetet kipróbálhatod.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 február 03, 19:50
Írta: 000000000 Dátum 2017 február 03, 19:50
"Minimum 3órás G-kódot lefuttatnám."
Minek ehhez minimum 3 óra meg a sok haszontalan G kód?
Spórolok Neked egy kis időt.[#circling]
A Robsy egységugrás teszt alkalmazásával a különbség 1 perc alatt kimérhető.
Minek ehhez minimum 3 óra meg a sok haszontalan G kód?
Spórolok Neked egy kis időt.[#circling]
A Robsy egységugrás teszt alkalmazásával a különbség 1 perc alatt kimérhető.
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2017 február 03, 19:52
Írta: zozo Dátum 2017 február 03, 19:52
Állítólag biztosabb és simább a motor futása, ha a vezérlő max. feszültségén hajtod. Danibá kísérletezett vele.
Az áramfelvételről pedig még annyit.
Úgy méreteztem a gépem tápját, hogy a motor árama kétszer és szorozva 1,4-el. Ez persze szorozva a motor feszültséggel, hogy kb. teljesítményt kapjak.
Aztán 32V-on 6A áramkorlátot állítottam. 3A -t sem érte el soha, sem hold-ban sem 3 tengely egyidejű mozgása esetén.
Az áramfelvételről pedig még annyit.
Úgy méreteztem a gépem tápját, hogy a motor árama kétszer és szorozva 1,4-el. Ez persze szorozva a motor feszültséggel, hogy kb. teljesítményt kapjak.
Aztán 32V-on 6A áramkorlátot állítottam. 3A -t sem érte el soha, sem hold-ban sem 3 tengely egyidejű mozgása esetén.
Cím: Re:Léptetőmotor
Írta: guliver83 Dátum 2017 február 03, 19:52
Írta: guliver83 Dátum 2017 február 03, 19:52
Pár évvel ezelőtt teszteltem pár darab léptetőmotor meghajtót.
30V-os labortápról hajtottam 3db vezérlőt motorral.
Vezérlő 1,5A volt állítva és amikor a három db ment egyszerre akkor nem vettek fel 3A összesen.
30V-os labortápról hajtottam 3db vezérlőt motorral.
Vezérlő 1,5A volt állítva és amikor a három db ment egyszerre akkor nem vettek fel 3A összesen.
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2017 február 03, 19:57
Írta: zozo Dátum 2017 február 03, 19:57
Tibor, hogy méretezünk léptető max.áramfelvételt?
Egységugrás Kísérletekkel?
-Vagy van valami jobb az általam írt saccolásos módszertől?
Egységugrás Kísérletekkel?
-Vagy van valami jobb az általam írt saccolásos módszertől?
Cím: Re:Léptetőmotor
Írta: z2a2u8wf Dátum 2017 február 03, 19:58
Írta: z2a2u8wf Dátum 2017 február 03, 19:58
Meg tudnád akkor nézni van e különbség? Persze ha időd engedi.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 február 03, 20:51
Írta: 000000000 Dátum 2017 február 03, 20:51
"hogy méretezünk léptető max.áramfelvételt?"
Nem értem a kérdésedet.
A kétfázisú léptetőmotor adatlapján ott van, hogy mennyi lehet a max. árama.
A tápegységből felvett elméleti max. áram pedig ennek ~1.41 szerese lehet. Ez az érték viszont nem állandó, hanem a két fázistekercs eredő áramáról beszélhetünk, ami az idő függvényében egymástól 90 fokkal eltolt két szinuszos függvényből adódik ki. Ezt még kompenzálni kell a pillanatnyi fordulatszámmal, hiszen alacsony vagy álló motortengely esetén töredék lesz az áram felvétel is.
A lényeg tehát, hogy a mai korszerű kapcsoló üzemű áramgenerátoros PWM FET-es végfokkal rendelkező lépetető motor vezérlők esetében teljesen felesleges a motor áram max. értékénél folyamatosan többet tudó tápegységre beruházni.
Nem értem a kérdésedet.
A kétfázisú léptetőmotor adatlapján ott van, hogy mennyi lehet a max. árama.
A tápegységből felvett elméleti max. áram pedig ennek ~1.41 szerese lehet. Ez az érték viszont nem állandó, hanem a két fázistekercs eredő áramáról beszélhetünk, ami az idő függvényében egymástól 90 fokkal eltolt két szinuszos függvényből adódik ki. Ezt még kompenzálni kell a pillanatnyi fordulatszámmal, hiszen alacsony vagy álló motortengely esetén töredék lesz az áram felvétel is.
A lényeg tehát, hogy a mai korszerű kapcsoló üzemű áramgenerátoros PWM FET-es végfokkal rendelkező lépetető motor vezérlők esetében teljesen felesleges a motor áram max. értékénél folyamatosan többet tudó tápegységre beruházni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 február 03, 20:59
Írta: 000000000 Dátum 2017 február 03, 20:59
Csináltam már sok ilyen mérést, és természetsen aztörténik, amit az elmélet mond, azaz nyilván a második esetben leromlik a léptető motor dinmamikája, de nem elsősorban a 4A miatt, hanem a csökkentett tápfesz miatt.
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2017 február 03, 22:30
Írta: zozo Dátum 2017 február 03, 22:30
Természetesen a táp oldali áramra gondoltam én is, mivel arról volt szó végig.
Akkor ez így rendben, köszi.
Akkor ez így rendben, köszi.
Cím: Re:Léptetőmotor
Írta: RJancsi Dátum 2017 február 08, 16:12
Írta: RJancsi Dátum 2017 február 08, 16:12
Sziasztok! Az a kérdésem, hogy egy kínai DRV8825 motordriver milyen "step" jelet vár? Konkrétan úgy szeretnék egy léptecset meghajtani, hogy nem pc-vel, hanem egy önálló astabil multivibrátorral (pl. 555 IC) generálnám a léptető jeleket. A "DIR" szabadon maradna mert nincs szükség irányváltásra. Ami még érdekel, milyen kitöltési tényezők mellett működhet a dolog, mert a fordulatszámot egy potival szeretném változtatni így a kitöltési tényező sem állandó.
Cím: Re:Léptetőmotor
Írta: pbalazs Dátum 2017 február 08, 17:02
Írta: pbalazs Dátum 2017 február 08, 17:02
Én ezt (http://www.ti.com/lit/ds/symlink/drv8825.pdf) az adatlapot néztem, és azt mondja a 7.6 pontban, hogy max. 250KHz a freki, és min. 1.9us a magas- és alacsony szintek ideje.
Cím: Re:Léptetőmotor
Írta: RJancsi Dátum 2017 február 08, 17:09
Írta: RJancsi Dátum 2017 február 08, 17:09
Köszi! Eszerint simán meghajtható egy 555 IC-re épülő áramkörrel. Az talán nem is tud ilyen rövid impulzust kiadni.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2017 február 08, 19:38
Írta: ANTAL GÁBOR Dátum 2017 február 08, 19:38
Mindíg kézzel ( lecsavart potiállással) fogsz indulni majd felpörgeted a motort? Vagy egy adott potiállás jelét kapcsolod rá a motorra ?
Ha az utóbbi akkor érhetnek meglepetések ( a rámpa hiánya miatt ) Én a cmos pll áramkörből csináltam olyan step generátort ( a belső VCO felhasználásával ) ami rámpásan indul és hasonlóan rámpásan áll meg
( geofizikai karottázs csörlőnél használják )
Ha az utóbbi akkor érhetnek meglepetések ( a rámpa hiánya miatt ) Én a cmos pll áramkörből csináltam olyan step generátort ( a belső VCO felhasználásával ) ami rámpásan indul és hasonlóan rámpásan áll meg
( geofizikai karottázs csörlőnél használják )
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2017 február 08, 19:56
Írta: zozo Dátum 2017 február 08, 19:56
Esetleg ez?
NE55 pulse generator (http://www.ebay.com/itm/NE555-Pulse-Generator-Frequency-Duty-Cycle-Adjust-Stepper-Motor-Driver-tester-/282050613506?hash=item41ab86d102:g:RlMAAOSwepZXSA2F)
-4 frekihatár
-potis freki állítás
-kitöltési tényező állítás (finomhangolás?)
NE55 pulse generator (http://www.ebay.com/itm/NE555-Pulse-Generator-Frequency-Duty-Cycle-Adjust-Stepper-Motor-Driver-tester-/282050613506?hash=item41ab86d102:g:RlMAAOSwepZXSA2F)
-4 frekihatár
-potis freki állítás
-kitöltési tényező állítás (finomhangolás?)
Cím: Re:Léptetőmotor
Írta: RJancsi Dátum 2017 február 09, 06:42
Írta: RJancsi Dátum 2017 február 09, 06:42
Teljesen eretnek gondolatom támadt, új megközelítésű 3D nyomtatót akarok építeni a meglévő CNC gravírozóm minimális átalakításával. Az eretnekség az, hogy nem hagyományos filament olvasztásos műanyagot szeretnék használni, hanem pépes anyagot (pl. tortadíszítő vajkrémet stb.) amit egy kis perisztaltikus pumpával (ez már meg van) (http://www.ebay.com/itm/Peristaltic-Pump-Dosing-Pump-42-Stepper-Motor-Tubing-Hose-Pump-Aquarium-Lab-/182086308403?hash=item2a65309233:g:tloAAOSw8RJXCOTm) továbbítanék a fúvókához. A szivattyú vezérlését a Planet CNCUSB MK1 vezérlőm spindle vagy a flood jelével kapcsolnám. Egyszerűbbnek tűnik egy külső fordulatszám (térfogatáram) szabályzás, mint az MK1-ből kihozni a jelet. Különösen, hogy a kísérletezés szakaszában jobb ötletnek tűnik "kézzel" beavatkozni a "nyomtatásba" mint szoftveresen állítgatni.
Cím: Re:Léptetőmotor
Írta: RJancsi Dátum 2017 február 09, 06:48
Írta: RJancsi Dátum 2017 február 09, 06:48
Köszi! Jópofa áramkör, de lehet, hogy bonyolultabb mint ami nekem kéne.
Cím: Re:Léptetőmotor
Írta: kaqkk007 Dátum 2017 február 09, 07:13
Írta: kaqkk007 Dátum 2017 február 09, 07:13
Ha kínai klónod van akkor az tudja a fordulatszabályzást van rajta 0-10V kimenet ..
Cím: Re:Léptetőmotor
Írta: RJancsi Dátum 2017 február 09, 07:19
Írta: RJancsi Dátum 2017 február 09, 07:19
Nekem eredeti Planet van. Ebben az esetben nem előny.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2017 február 09, 07:47
Írta: ANTAL GÁBOR Dátum 2017 február 09, 07:47
Azzal nem lesz semmi gond,a perisztaltika nem igényel nagy fordulatot . Rámpa nélkül is menni fog , elég az 555
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2017 február 09, 09:07
Írta: Rabb Ferenc Dátum 2017 február 09, 09:07
Csak egy naív kérdés: kipróbáltad már, hogy ez a pumpa fel tudja szívni a közel sem homogén állagú, viszonylag sűrű masszát?
Cím: Re:Léptetőmotor
Írta: RJancsi Dátum 2017 február 09, 09:21
Írta: RJancsi Dátum 2017 február 09, 09:21
Igen. Próbaként levettem róla a léptetőmotort és a szivattyút egy akkus csavarozógéppel hajtottam. A nem túl kemény vajat, margarint simán vitte. Elrendezés kérdése, hogy nem kelljen felszívnia a trutyit, lehet a tartály a pumpa felett is. Az iparban ilyen pumpákat használnak kenőcsök, zsírok, de akár lekvárok továbbítására, adagolására is.
Cím: Re:Léptetőmotor
Írta: RJancsi Dátum 2017 február 09, 09:30
Írta: RJancsi Dátum 2017 február 09, 09:30
Ja, annyi változtatást eszközöltem, hogy az eredeti szűk keresztmetszetű műanyag csatlakozók helyett simán áthúztam egy 6x0.5 mm-es szilikon csövet a pumpán. A "tartály" egy 200 ml-es szérum fecskendő volt, amivel az indításnál rá tudtam venni a trutyit, hogy légbubik nélkül menjen el a szivattyúig.
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2017 február 09, 09:37
Írta: Rabb Ferenc Dátum 2017 február 09, 09:37
Köszönöm, megnyugtattál [#worship][#law]
Cím: Re:Léptetőmotor
Írta: Karácsony Sándor Dátum 2017 február 09, 09:42
Írta: Karácsony Sándor Dátum 2017 február 09, 09:42
Jó ötlet cnc-re.
Szeretem nézegetni a "nem vas marós "cnc -s megoldásokat is.
Hobby szinten a cnc-ben a mechanikai stabilitás és pontosság drága. De díszítő alkalmazásoknál nem mindig ez a legfontosabb követelmény, ha eredmény, és az esztétikai élmény nem romlik.pl.
torta díszítő cnc (https://www.youtube.com/watch?v=Za3Z7b-dpZQ)
Szeretem nézegetni a "nem vas marós "cnc -s megoldásokat is.
Hobby szinten a cnc-ben a mechanikai stabilitás és pontosság drága. De díszítő alkalmazásoknál nem mindig ez a legfontosabb követelmény, ha eredmény, és az esztétikai élmény nem romlik.pl.
torta díszítő cnc (https://www.youtube.com/watch?v=Za3Z7b-dpZQ)
Cím: Re:Léptetőmotor
Írta: Karácsony Sándor Dátum 2017 február 09, 09:45
Írta: Karácsony Sándor Dátum 2017 február 09, 09:45
https://www.youtube.com/watch?v=Za3Z7b-dpZQ torta díszítő
Cím: Re:Léptetőmotor
Írta: Karácsony Sándor Dátum 2017 február 09, 09:50
Írta: Karácsony Sándor Dátum 2017 február 09, 09:50
Nem lilul be a link csak kiíródik....Hol a bénázó topik?
Cím: Re:Léptetőmotor
Írta: b4nm7gjvr Dátum 2017 február 09, 11:41
Írta: b4nm7gjvr Dátum 2017 február 09, 11:41
Ja, hogy ott lent jobbra talán ha rámentél volna az "[Internet link beszúrása]" és oda beszúrod a linket, és még el is nevezed, akkor belilul a link! :D
itt tudsz gyakorolni! (http://forum.hobbycnc.hu/topic.php?topic=196)
itt tudsz gyakorolni! (http://forum.hobbycnc.hu/topic.php?topic=196)
Cím: Re:Léptetőmotor
Írta: dezso74 Dátum 2017 március 15, 16:01
Írta: dezso74 Dátum 2017 március 15, 16:01
Szia kymcol1!
Az említett léptető motorvezérlőkhöz hol találok kapcsolási rajzot Tb6600, dm542.
Előre is köszönöm a válaszod!
Üdv:
dezso74
Az említett léptető motorvezérlőkhöz hol találok kapcsolási rajzot Tb6600, dm542.
Előre is köszönöm a válaszod!
Üdv:
dezso74
Cím: Re:Léptetőmotor
Írta: vjanos Dátum 2017 március 15, 17:41
Írta: vjanos Dátum 2017 március 15, 17:41
Nem is olyan eretnek ötlet... ;)
Paste extruder (https://www.google.hu/search?q=pasta+extruder&ie=utf-8&oe=utf-8&client=firefox-b-ab&gfe_rd=cr&ei=_mzJWIPiJKfi8AeBx4OwDw#q=3d+printer+paste+extruder&*) néven találsz különféle megoldásokat a neten.
Egy szempont: Általában a 3d nyomtatásnál fontos minőség javító a retract, azaz a szálvisszahúzás.
Mindenképp olyan konstrukciót javaslok, amivel meg tudod oldani az anyag minimális visszaszippantását, vagy legalább a masszára nehezedő nyomást tudod csökkenteni.
Ilyen szempontból ez a pumpa jónak tűnik, csak egy kis visszaforgatás kellhet...
Én csokoládé nyomtatót akarok csinálni már egy ideje, főleg mikor húsvétkor és mikuláskor kapnak a gyerekek egy fél vödörnyi csokinyuszit/csokimikit, amit aztán meg se kóstolnak...
Paste extruder (https://www.google.hu/search?q=pasta+extruder&ie=utf-8&oe=utf-8&client=firefox-b-ab&gfe_rd=cr&ei=_mzJWIPiJKfi8AeBx4OwDw#q=3d+printer+paste+extruder&*) néven találsz különféle megoldásokat a neten.
Egy szempont: Általában a 3d nyomtatásnál fontos minőség javító a retract, azaz a szálvisszahúzás.
Mindenképp olyan konstrukciót javaslok, amivel meg tudod oldani az anyag minimális visszaszippantását, vagy legalább a masszára nehezedő nyomást tudod csökkenteni.
Ilyen szempontból ez a pumpa jónak tűnik, csak egy kis visszaforgatás kellhet...
Én csokoládé nyomtatót akarok csinálni már egy ideje, főleg mikor húsvétkor és mikuláskor kapnak a gyerekek egy fél vödörnyi csokinyuszit/csokimikit, amit aztán meg se kóstolnak...
Cím: Re:Léptetőmotor
Írta: RJancsi Dátum 2017 március 15, 17:47
Írta: RJancsi Dátum 2017 március 15, 17:47
És mit nyomtatnál, amit mégiscsak megkóstolnak? [#nevetes1]
Sokkal életszerűbb, ha a megkóstolt (körberágott) csokidarabokból újrahasznosított valamit nyomtatsz amit újból megkóstolhatnak/körberághatnak. Előbb-utóbb csak elfogy... [#vigyor2]
Sokkal életszerűbb, ha a megkóstolt (körberágott) csokidarabokból újrahasznosított valamit nyomtatsz amit újból megkóstolhatnak/körberághatnak. Előbb-utóbb csak elfogy... [#vigyor2]
Cím: Re:Léptetőmotor
Írta: vjanos Dátum 2017 március 15, 17:52
Írta: vjanos Dátum 2017 március 15, 17:52
Sikeresen kiragadtad a lényeget... :(
A saját ovisjelét, kisautót, kismotort biztos megennék - egyszer :)
De nyilván ez csak szórakozás, mint ahogy tojásrajzolót is csináltam, meg még egyéb haszontalan vackokat...
A saját ovisjelét, kisautót, kismotort biztos megennék - egyszer :)
De nyilván ez csak szórakozás, mint ahogy tojásrajzolót is csináltam, meg még egyéb haszontalan vackokat...
Cím: Re:Léptetőmotor
Írta: yy2yggmv7 Dátum 2017 március 18, 17:16
Írta: yy2yggmv7 Dátum 2017 március 18, 17:16
Lehet már nem aktuális de én anno 4046-ból csináltam, +egy-két alkatrész.
http://www.eleccircuit.com/the-100-hz-to-10-khz-square-wave-generator-by-phase-lock-loop-ic/
http://www.eleccircuit.com/the-100-hz-to-10-khz-square-wave-generator-by-phase-lock-loop-ic/
Cím: Re:Léptetőmotor
Írta: RJancsi Dátum 2017 március 18, 18:14
Írta: RJancsi Dátum 2017 március 18, 18:14
Köszi, de már úton van Kínából az 555-re épülő négyszög generátor.
Cím: Re:Léptetőmotor
Írta: frob Dátum 2017 április 18, 17:40
Írta: frob Dátum 2017 április 18, 17:40
Sziasztok
Érdekelne hogy használt e valaki már ilyen léptető motor , meghajtó kombót?
Easy Servo iES-2320-1000 (http://webaruhaz.klavio.hu/?id=85b75cfc564c4822863dbd4884138991&p=termeklap&tkod=1554)
Az enkóder miatt tetszik a dolog... gondolom mivel servonak van titulálva, hasonló módon kezeli a léptető motort...
Érdekelne hogy használt e valaki már ilyen léptető motor , meghajtó kombót?
Easy Servo iES-2320-1000 (http://webaruhaz.klavio.hu/?id=85b75cfc564c4822863dbd4884138991&p=termeklap&tkod=1554)
Az enkóder miatt tetszik a dolog... gondolom mivel servonak van titulálva, hasonló módon kezeli a léptető motort...
Cím: Re:Léptetőmotor
Írta: 4x9xcj5r9 Dátum 2017 május 11, 18:49
Írta: 4x9xcj5r9 Dátum 2017 május 11, 18:49
Sziasztok
megvan valakinek az a leiras ami hatrebb linkelve van csak nem él a link, hogyan kell méretezni a léptetömotorokat?
köszi
megvan valakinek az a leiras ami hatrebb linkelve van csak nem él a link, hogyan kell méretezni a léptetömotorokat?
köszi
Cím: Re:Léptetőmotor
Írta: cnv Dátum 2017 május 18, 12:23
Írta: cnv Dátum 2017 május 18, 12:23
Ez engem is érdekel...
Egy hasonlóval szemezek (HSS57 + 57HSE)
Leginkább az érdekelne, hogyan működik ez a gyakorlatban?
Ha érzékeli hogy nem sikerült lépni, akkor próbálkozik valameddig (meddig?) és aztán ad egy lépéshiba jelet ha még mindig sikertelen?
Mi van akkor, ha a microstep felbontás meghaladja az enkóder felbontást (1000ppr). Azért full step szinten követi hol tart?
És akkor mi van, ha tartás közben külső erő kimozdítja a pozícióból? Visszamozog mint egy szervó, vagy csak a saját maga által kezdeményezett mozgásokat követi?
Egy hasonlóval szemezek (HSS57 + 57HSE)
Leginkább az érdekelne, hogyan működik ez a gyakorlatban?
Ha érzékeli hogy nem sikerült lépni, akkor próbálkozik valameddig (meddig?) és aztán ad egy lépéshiba jelet ha még mindig sikertelen?
Mi van akkor, ha a microstep felbontás meghaladja az enkóder felbontást (1000ppr). Azért full step szinten követi hol tart?
És akkor mi van, ha tartás közben külső erő kimozdítja a pozícióból? Visszamozog mint egy szervó, vagy csak a saját maga által kezdeményezett mozgásokat követi?
Cím: Re:Léptetőmotor
Írta: dezsoe Dátum 2017 május 18, 14:09
Írta: dezsoe Dátum 2017 május 18, 14:09
Nekem Vexta AlphaStep ASC zárt hurkú léptetőim vannak, nagyon jók. Ez azt csinálja, hogy ha kitéríted a helyéről, akkor visszamegy. Ha annyira kitéríted, hogy már nem tudja követni, vagy túl sokáig nincs pozícióban, akkor lekapcsol hibajellel.
Cím: Re:Léptetőmotor
Írta: cnv Dátum 2017 május 18, 19:51
Írta: cnv Dátum 2017 május 18, 19:51
Köszi...
Közben sikerült felvennem a kapcsolatot az egyik forgalmazóval is, ők is azt mondják amit Te, +-128 encoder lépés eltérésig úgy viselkedik mint a szervóhajtás, tehát visszatér, illetve próbálja tartani az előírt pozíciót.
Ez a +-128 azért elég soknak tűnik, 5mm-es orsónál már több mint 1mm. Gondolom csak extrém gyorsulás/lassulás esetén lehet ekkora csúszás, normál marás közben nemigen.
Mindenesetre engem meggyőzött, beruházok egy ilyen szettre (pontosabban háromra).
Közben sikerült felvennem a kapcsolatot az egyik forgalmazóval is, ők is azt mondják amit Te, +-128 encoder lépés eltérésig úgy viselkedik mint a szervóhajtás, tehát visszatér, illetve próbálja tartani az előírt pozíciót.
Ez a +-128 azért elég soknak tűnik, 5mm-es orsónál már több mint 1mm. Gondolom csak extrém gyorsulás/lassulás esetén lehet ekkora csúszás, normál marás közben nemigen.
Mindenesetre engem meggyőzött, beruházok egy ilyen szettre (pontosabban háromra).
Cím: Re:Léptetőmotor
Írta: dezsoe Dátum 2017 május 18, 20:26
Írta: dezsoe Dátum 2017 május 18, 20:26
Nekem nagyon bevált. Az elsőt egy mechanikával vettem, mert rajta volt. :) Aztán még amennyit tudtam és futotta rá. Most egy 10x2-es trapézorsóval röhögve viszi a 2500 mm/min-t. Ja, és ez a gyengébbik, mert kétféle volt. Kereteimhez képest nem volt olcsó, de az értékéhez viszonyítva nagyon. :)
Cím: Re:Léptetőmotor
Írta: GPeti1977 Dátum 2017 május 19, 17:46
Írta: GPeti1977 Dátum 2017 május 19, 17:46
Ha a kis CNC gépemen lecserélném a NEMA-17 léptetőket 30W os AC szervó motorra akkor attól jobb lenne, pl gyorsabb dinamikusabb, a motor megvan de nincs hozzá driverem, bár a CNC zone fórumon találtam egy DIY driver leírását amit el is tudnék készíteni.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 május 19, 18:48
Írta: svejk Dátum 2017 május 19, 18:48
Minden bizonnyal, de majdnem biztos, hogy meg kell az áttételt is változtatnod.
Milyen motorjaid vannak pontosan és milyen DIY szervo leírást találtál?
Milyen motorjaid vannak pontosan és milyen DIY szervo leírást találtál?
Cím: Re:Léptetőmotor
Írta: GPeti1977 Dátum 2017 május 19, 21:09
Írta: GPeti1977 Dátum 2017 május 19, 21:09
CNC Zone DIY AC Servo Drive (http://www.cnczone.com/forums/open-source-controller-boards/253254-software.html)
A letöltéshez regisztrálni kell.
A motor Sanyo Denki 30W 100V 6000rpm, még azt nem tudom hogy hány pólusú, meg mekkora az enkóder felbontása, 2 fázisú szimetrikus jelet ad, meg egy másik érpáron minden fordulatra egy impulzust. a pontos típust majd leírom most nincs nálam hátha kiderül abból valami paraméter még.
A letöltéshez regisztrálni kell.
A motor Sanyo Denki 30W 100V 6000rpm, még azt nem tudom hogy hány pólusú, meg mekkora az enkóder felbontása, 2 fázisú szimetrikus jelet ad, meg egy másik érpáron minden fordulatra egy impulzust. a pontos típust majd leírom most nincs nálam hátha kiderül abból valami paraméter még.
Cím: Re:Léptetőmotor
Írta: 0cphxg8ns Dátum 2017 május 23, 07:48
Írta: 0cphxg8ns Dátum 2017 május 23, 07:48
Tiszteletem!
Lenne egy fura kérdésem és biztos vagyok benne, hogy az itteni tapasztalt rókák azonnal tudnak valami okosat mondani rá. :)
Mért van az, hogy egy régi NEMA17-es motor. 4V 1.1A, vagy másik testvére 24V 0.3A árammal megy, míg a mai (modern) darabok 1.5A alatt meg se nyekkennek?
pl: Astrosyn 23LM-C003-03 (https://www.picclickimg.com/d/l400/pict/282042575498_/Lot-of-2-TWO-Astrosyn-23LM-C003-03-Miniangle-Stepper.jpg)
Mert ugye az olcsó vezérlők 1.5A alatt hűtőborda nélkül is mennek, akár 40++V feszültséggel, ezért örülök, hogy léteznek ilyen nagy feszültségű/kis áramú motorok, csak nem értem, hogy ha ma szeretnék (modern, nem régi) venni egy ilyet, akkor nem találok nagyon. (rosszul keresem?)
A kérdésem igazából arra vonatkozik, hogy miért az áramfelvétele nő a "modern" motoroknak, és mért nem a feszkó? Mi a titok nyitja?
(ugye így új vezérlőt kéne vennem (a mostani bmp 8825 helyett).
A kérdés gyermeteg jellege miatt kérném kellő türelemmel kezelni a válaszokat is. :P
Köszönöm előre is az építő hozzászólásokat! [#worship]
Üdv: Sokimm
Lenne egy fura kérdésem és biztos vagyok benne, hogy az itteni tapasztalt rókák azonnal tudnak valami okosat mondani rá. :)
Mért van az, hogy egy régi NEMA17-es motor. 4V 1.1A, vagy másik testvére 24V 0.3A árammal megy, míg a mai (modern) darabok 1.5A alatt meg se nyekkennek?
pl: Astrosyn 23LM-C003-03 (https://www.picclickimg.com/d/l400/pict/282042575498_/Lot-of-2-TWO-Astrosyn-23LM-C003-03-Miniangle-Stepper.jpg)
Mert ugye az olcsó vezérlők 1.5A alatt hűtőborda nélkül is mennek, akár 40++V feszültséggel, ezért örülök, hogy léteznek ilyen nagy feszültségű/kis áramú motorok, csak nem értem, hogy ha ma szeretnék (modern, nem régi) venni egy ilyet, akkor nem találok nagyon. (rosszul keresem?)
A kérdésem igazából arra vonatkozik, hogy miért az áramfelvétele nő a "modern" motoroknak, és mért nem a feszkó? Mi a titok nyitja?
(ugye így új vezérlőt kéne vennem (a mostani bmp 8825 helyett).
A kérdés gyermeteg jellege miatt kérném kellő türelemmel kezelni a válaszokat is. :P
Köszönöm előre is az építő hozzászólásokat! [#worship]
Üdv: Sokimm
Cím: Re:Léptetőmotor
Írta: Csuhás Dátum 2017 május 23, 08:01
Írta: Csuhás Dátum 2017 május 23, 08:01
Nagyobb feszültségű motor az vékonyabb huzalból nagyobb menetszámú tekercselést jelent ami nagyobb induktivitású. A nagyobb induktivitás viszont növeli az elektromos időállandót. Azaz a léptetés idejére hiába kapcsolsz nagy feszültséget a motorra az áram csak lassan fut fel. Az átlagáram gyorsan csökken a léptetési freki növelésével, ez padig a mágneses tér csökkenését, és végül is a nyomaték esését okozza.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 május 23, 08:32
Írta: 000000000 Dátum 2017 május 23, 08:32
A motor feszültsége minél kisebb az áramnak annál nagyobbnak kell lenni hogy a teljesítménye ugyanakkora legyen.
Vegyük a példádat. 24 volt 0.3Amper az 7.2 Watt és a 4 volt 1,5 Amper az 6 Watt
De a 4 voltos motor a például 24 volt betáplálású vezérlővel sem fog felvenni 1.5 Ampert mert az áram olyan gyorsan alakul ki a tekercseben hogy a PWM szinte csak tűimpulzusokat tud küldeni.
Eleve 24 volton a 1.5 Amper 36 Watt, az a kis motor ekkora teljesítmény bevitelre lángolna pillanatokon belül. (ezért is röhögök mikor több 1000Wattos tápokat tesznek a léptető motorokhoz)
Csak egy példa : 17HS5415P1-X6 típusú motor és egy leadshine vezérlő 24 volt betáplálással álló helyzetben 0.1Ampert fogyaszt.
Ugyanez a motor és vezérlő percenkénti 500-as fordulaton 0,35-0.4 Amper vesz fel.
Ez azért van mert a motor áramfelépülése a kisebb indukciójú tekercsben gyors és a vezérlő figyeli az áramot amit a PWM-el szabályoz.
A PWM átlag feszültség és áram pedig nem fogja meghaladni a a motor összteljesítményét.
És mint tudjuk energiát sem előállítani sem elpusztítani nem lehet, max átalakítani !
Így a tápegységből sem vehet fel 36 wattot az a szerencsétlen pár wattos motor.
De a lényeg nem ez !
Azért használnak is feszültségű motorokat mert az áram sokkal gyorsabban épül fel a kis indukciójú tekercsekben így nagyobb fordulatszámon lehet pörgetni.
Hátránya: azonos teljesítményhez nagyobb áram kell.
A 24 voltos motorkádat meg simán olajozd le és mehet át a szomszédba, hogy szopjanak vele Ők tovább [#nevetes1]
Mert az például 24 voltos vezérlővel pár 100-asfordulatnál úgy el fogja dobni a nyomatékát amivel semmit nem fog tudni mozgatni.
És a pár 100-as fordulat is erős jóindulattal megelőlegezve.
És még lehetne beszélni itt a DC choper tartományról és egyéb dolgokról, de most szerintem ennyi bőven elég előemésztésre.
Vegyük a példádat. 24 volt 0.3Amper az 7.2 Watt és a 4 volt 1,5 Amper az 6 Watt
De a 4 voltos motor a például 24 volt betáplálású vezérlővel sem fog felvenni 1.5 Ampert mert az áram olyan gyorsan alakul ki a tekercseben hogy a PWM szinte csak tűimpulzusokat tud küldeni.
Eleve 24 volton a 1.5 Amper 36 Watt, az a kis motor ekkora teljesítmény bevitelre lángolna pillanatokon belül. (ezért is röhögök mikor több 1000Wattos tápokat tesznek a léptető motorokhoz)
Csak egy példa : 17HS5415P1-X6 típusú motor és egy leadshine vezérlő 24 volt betáplálással álló helyzetben 0.1Ampert fogyaszt.
Ugyanez a motor és vezérlő percenkénti 500-as fordulaton 0,35-0.4 Amper vesz fel.
Ez azért van mert a motor áramfelépülése a kisebb indukciójú tekercsben gyors és a vezérlő figyeli az áramot amit a PWM-el szabályoz.
A PWM átlag feszültség és áram pedig nem fogja meghaladni a a motor összteljesítményét.
És mint tudjuk energiát sem előállítani sem elpusztítani nem lehet, max átalakítani !
Így a tápegységből sem vehet fel 36 wattot az a szerencsétlen pár wattos motor.
De a lényeg nem ez !
Azért használnak is feszültségű motorokat mert az áram sokkal gyorsabban épül fel a kis indukciójú tekercsekben így nagyobb fordulatszámon lehet pörgetni.
Hátránya: azonos teljesítményhez nagyobb áram kell.
A 24 voltos motorkádat meg simán olajozd le és mehet át a szomszédba, hogy szopjanak vele Ők tovább [#nevetes1]
Mert az például 24 voltos vezérlővel pár 100-asfordulatnál úgy el fogja dobni a nyomatékát amivel semmit nem fog tudni mozgatni.
És a pár 100-as fordulat is erős jóindulattal megelőlegezve.
És még lehetne beszélni itt a DC choper tartományról és egyéb dolgokról, de most szerintem ennyi bőven elég előemésztésre.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2017 május 23, 11:26
Írta: keri Dátum 2017 május 23, 11:26
Röviden. A kisebb feszültségű motorok, gyorsabban pörögnek és magasabb fordulaton adják le a nyomatékukat, vagyis nagyobb teljesítményre képesek jobb hatásfok mellet.
Cím: Re:Léptetőmotor
Írta: 0cphxg8ns Dátum 2017 május 23, 16:41
Írta: 0cphxg8ns Dátum 2017 május 23, 16:41
Köszönöm mindenkinek a szuper válaszokat! Irtó klassz az itteni segítőkészség, és szaktudás keveréke! [#worship]
Már csak egy fura kérdésem lenne:
Egy DRV8825 (https://www.pololu.com/product/2133) meghajtónak (1.5A 45V) melyik a maximum (nem szeretnék hűtőbordát rá) motor, amit elbír?
(ilyen meghajtóm van itthon egy marék, ezért is szeretnék maximalizálni a lehetőségeimhez képest)
Persze tudom, itt tennétek fel a kérdést: Mit fog hajtani?
Jelenleg csak diódás lézerrel (3.5W) szeretnék nyákot égetni (akril), és 3mm-es rétegelt lemezt szeretnék vágni, de ha a jövőben lenne keret egy maró motorra, akkor akár alu marással is bepróbálkoznék.
És mit mozgatna a motor?
3mm-es menetemelkedésű mángorolt trapézorsót, amin egy durván 5kg-os alu lap (1x36x40cm) van, (ez az Y tengely). Ez a munkaterület alapja. A munkadarabok súlya elenyésző az Y tengelyen lévő alu laphoz képest... :)
Nem tudom igazán mennyire kellene erős (gyors?) motor ide.
(még soha nem volt összeszerelve, használva a gép, most vagyok a motorválasztás előtt... :P)
(a többi tengely (X, Z) nem mozgatna ekkora súlyt, max 2kg-ot, tehát ami az Y-hoz jó, az jó lenne mindenhova. :P
Bármilyen tanácsot elfogadok tőletek! :)
Már csak egy fura kérdésem lenne:
Egy DRV8825 (https://www.pololu.com/product/2133) meghajtónak (1.5A 45V) melyik a maximum (nem szeretnék hűtőbordát rá) motor, amit elbír?
(ilyen meghajtóm van itthon egy marék, ezért is szeretnék maximalizálni a lehetőségeimhez képest)
Persze tudom, itt tennétek fel a kérdést: Mit fog hajtani?
Jelenleg csak diódás lézerrel (3.5W) szeretnék nyákot égetni (akril), és 3mm-es rétegelt lemezt szeretnék vágni, de ha a jövőben lenne keret egy maró motorra, akkor akár alu marással is bepróbálkoznék.
És mit mozgatna a motor?
3mm-es menetemelkedésű mángorolt trapézorsót, amin egy durván 5kg-os alu lap (1x36x40cm) van, (ez az Y tengely). Ez a munkaterület alapja. A munkadarabok súlya elenyésző az Y tengelyen lévő alu laphoz képest... :)
Nem tudom igazán mennyire kellene erős (gyors?) motor ide.
(még soha nem volt összeszerelve, használva a gép, most vagyok a motorválasztás előtt... :P)
(a többi tengely (X, Z) nem mozgatna ekkora súlyt, max 2kg-ot, tehát ami az Y-hoz jó, az jó lenne mindenhova. :P
Bármilyen tanácsot elfogadok tőletek! :)
Cím: Re:Léptetőmotor
Írta: 3z4pi4rei Dátum 2017 május 24, 17:45
Írta: 3z4pi4rei Dátum 2017 május 24, 17:45
Sziasztok!
Akkor ide áthelyezve, kiegészítve...
A kisebbik motorom, Nema 17 típusa a csatolt képen.
Amit leírásban találtam (persze az utsó 3 szám nem stimmel) uni-polar esetén 0,58 és 0,46 A.
A TB6560 V-type 3 tengelyes (képen látható) leírása szerint a vezérlő csúcsárama 3,5 A. A DIP kapcsolókat variálva max 25%-ig lehet levinni, tehát 0,875 A. Azaz többet kap a kelleténél, nem?
Az áramlecsengéssel kapcsolatban a leírás ugyan azt írja, hogy nem érdemes hobbi szinten állítgatni, hagyjuk 0,0 állásban, mert akár tönkre is mehet a vezérlő. De én valakitől azt hallottam, hogy mégis állított rajta és sokkal halkabbak lettek a motorok! Ezt próbálta már valaki más is? A két pöcök milyen állásánál lett jó?
Belenagyítva a DIP kapcsolók állása is látható, változtassak valamin?
(https://hobbicncforum.hu/uploaded_images/2017/05/tn_ckyu28xfyv20zbdjwaki6_3680.jpg) (https://hobbicncforum.hu/uploaded_images/2017/05/ckyu28xfyv20zbdjwaki6_3680.jpg) (https://hobbicncforum.hu/uploaded_images/2017/05/tn_wajdgm62eixduw8akkuk_3680.jpg) (https://hobbicncforum.hu/uploaded_images/2017/05/wajdgm62eixduw8akkuk_3680.jpg)
Akkor ide áthelyezve, kiegészítve...
A kisebbik motorom, Nema 17 típusa a csatolt képen.
Amit leírásban találtam (persze az utsó 3 szám nem stimmel) uni-polar esetén 0,58 és 0,46 A.
A TB6560 V-type 3 tengelyes (képen látható) leírása szerint a vezérlő csúcsárama 3,5 A. A DIP kapcsolókat variálva max 25%-ig lehet levinni, tehát 0,875 A. Azaz többet kap a kelleténél, nem?
Az áramlecsengéssel kapcsolatban a leírás ugyan azt írja, hogy nem érdemes hobbi szinten állítgatni, hagyjuk 0,0 állásban, mert akár tönkre is mehet a vezérlő. De én valakitől azt hallottam, hogy mégis állított rajta és sokkal halkabbak lettek a motorok! Ezt próbálta már valaki más is? A két pöcök milyen állásánál lett jó?
Belenagyítva a DIP kapcsolók állása is látható, változtassak valamin?
(https://hobbicncforum.hu/uploaded_images/2017/05/tn_ckyu28xfyv20zbdjwaki6_3680.jpg) (https://hobbicncforum.hu/uploaded_images/2017/05/ckyu28xfyv20zbdjwaki6_3680.jpg) (https://hobbicncforum.hu/uploaded_images/2017/05/tn_wajdgm62eixduw8akkuk_3680.jpg) (https://hobbicncforum.hu/uploaded_images/2017/05/wajdgm62eixduw8akkuk_3680.jpg)
Cím: Re:Léptetőmotor
Írta: kaqkk007 Dátum 2017 május 24, 17:56
Írta: kaqkk007 Dátum 2017 május 24, 17:56
Én maximum ezt tenném rá a drv re (http://www.ebay.com/itm/1-8-Degree-35mm-NEMA14-2-Phase-12V-BYGHW-Stepper-Motor-For-3D-Printer-High-Quity-/191880094916)
Cím: Re:Léptetőmotor
Írta: kaqkk007 Dátum 2017 május 24, 17:59
Írta: kaqkk007 Dátum 2017 május 24, 17:59
Ja és ekkora meghajtókkal léptecsekkel az alu marást talán nem is kéne erőltetni, lézerre jó lesz (és még 3d nyominak)
Cím: Re:Léptetőmotor
Írta: keri Dátum 2017 május 24, 18:26
Írta: keri Dátum 2017 május 24, 18:26
Nem igazán értelek.
Nem harap a hűtőborda [#hehe]
Érdemes rátenni és akkor többet bír.
Kínaiak adnak hozzá alapból. (http://www.ebay.com/itm/5Pcs-DRV8825-stepper-motor-driver-Module-3D-printer-RAMPS1-4-RepRap-StepStick-/262136739294?hash=item3d089135de:g:MmUAAOSwSHZWclFU)
24-32V-nál többet ne adj a DRV-nek szerintem.
24V-ról nekem ennyit tud. (https://1drv.ms/v/s!ArYQ5r5KRF2jj80_UrzJIMzD8wvojA)
XY tengelyen a szíjas mozgatással 40mm az elmozdulás egy motor fordulatra.
Z tengelyen 8mm-es menetemelkedésű 4bekezdéses 8mm vastag orsó van bronz anyával. Szépen mozgatja, de erőt nem tud kifejteni.
2kg-ot nem hiszem hogy megemelne.
Annak is örülök hogy a súrlódást képes legyőzni és nem szorul meg :)
Ahol nem kell súlyt emelgetnie, ott mindegy mekkora tömeget mozgatsz, legfeljebb a gyorsulása lesz borzasztó alacsony.
Lézerre én egy hasonló könnyed szerkezetet javasolnék inkább. Marást nem erőltetném. A kisebb orsó menetemelkedéssel nem lesz erősebb, csak lassabb, mert a súrlódás amit le kell győzni. Golyós orsóval jó lenne, de az meg drága. Olcsóbb egy erősebb motort és vezérlőt venni.
Másik nyomtatómban 2mm-es menetemelkedésű orsó van 2.5A-es Nema17-es motorral. Oké kicsit erősebb mint a videón lévő, de nem alkalmas marásra.
Nem harap a hűtőborda [#hehe]
Érdemes rátenni és akkor többet bír.
Kínaiak adnak hozzá alapból. (http://www.ebay.com/itm/5Pcs-DRV8825-stepper-motor-driver-Module-3D-printer-RAMPS1-4-RepRap-StepStick-/262136739294?hash=item3d089135de:g:MmUAAOSwSHZWclFU)
24-32V-nál többet ne adj a DRV-nek szerintem.
24V-ról nekem ennyit tud. (https://1drv.ms/v/s!ArYQ5r5KRF2jj80_UrzJIMzD8wvojA)
XY tengelyen a szíjas mozgatással 40mm az elmozdulás egy motor fordulatra.
Z tengelyen 8mm-es menetemelkedésű 4bekezdéses 8mm vastag orsó van bronz anyával. Szépen mozgatja, de erőt nem tud kifejteni.
2kg-ot nem hiszem hogy megemelne.
Annak is örülök hogy a súrlódást képes legyőzni és nem szorul meg :)
Ahol nem kell súlyt emelgetnie, ott mindegy mekkora tömeget mozgatsz, legfeljebb a gyorsulása lesz borzasztó alacsony.
Lézerre én egy hasonló könnyed szerkezetet javasolnék inkább. Marást nem erőltetném. A kisebb orsó menetemelkedéssel nem lesz erősebb, csak lassabb, mert a súrlódás amit le kell győzni. Golyós orsóval jó lenne, de az meg drága. Olcsóbb egy erősebb motort és vezérlőt venni.
Másik nyomtatómban 2mm-es menetemelkedésű orsó van 2.5A-es Nema17-es motorral. Oké kicsit erősebb mint a videón lévő, de nem alkalmas marásra.
Cím: Re:Léptetőmotor
Írta: keri Dátum 2017 május 24, 18:28
Írta: keri Dátum 2017 május 24, 18:28
No igen. Hűtőborda nélkül kb. ennyit bír.
Hűtőbordával elbír nagyobb motorral is.
Hűtőbordával elbír nagyobb motorral is.
Cím: Re:Léptetőmotor
Írta: kaqkk007 Dátum 2017 május 24, 18:32
Írta: kaqkk007 Dátum 2017 május 24, 18:32
Hát azért 1,5A a vége azt hűtőbordával sem lépném át ...
de ott a tb6560 az már akár egy 3A os 3 Nm es motorral is megbírkózik és az sem egy ökör ára ...
de ott a tb6560 az már akár egy 3A os 3 Nm es motorral is megbírkózik és az sem egy ökör ára ...
Cím: Re:Léptetőmotor
Írta: 2dbfy8y Dátum 2017 május 24, 22:58
Írta: 2dbfy8y Dátum 2017 május 24, 22:58
Motorod 6 vezetékes?
Én azt az egyet tudom, miután szétszedtem a 6 vezetékest, ésátkötöttem úgy, hogy 4 vezetékesre vezttem ki, vagyis szétszedtem 8 veztékesne, úgy lett az igazi. Ereje sokkal jobb lett, és nem is melegedett utána annyira. Mondjuk én msd, és leandshine vezérlőt használtam, szerintem a tb-sek sehol nincsenek hozzá. Még a hangjuk is más, sokkal szebben jár vele a motor. Az áramlecsengéssel szerintem sok mindent nem fogsz elérni.
Én azt az egyet tudom, miután szétszedtem a 6 vezetékest, ésátkötöttem úgy, hogy 4 vezetékesre vezttem ki, vagyis szétszedtem 8 veztékesne, úgy lett az igazi. Ereje sokkal jobb lett, és nem is melegedett utána annyira. Mondjuk én msd, és leandshine vezérlőt használtam, szerintem a tb-sek sehol nincsenek hozzá. Még a hangjuk is más, sokkal szebben jár vele a motor. Az áramlecsengéssel szerintem sok mindent nem fogsz elérni.
Cím: Re:Léptetőmotor
Írta: 3z4pi4rei Dátum 2017 május 25, 06:06
Írta: 3z4pi4rei Dátum 2017 május 25, 06:06
Igen, emlékeim szerint 6 vezetékes mind a két motor.
Ahhoz szét kéne bombázni az egész gépet, amit nem szeretnék. Ezért támadt az az ötletem, hogy valami selfmade elektronika közbeiktatásával kiküszöbölhető lenne a dolog. Szerintem nem a mechanikában keresendő hiba okozza a cakkos kontúrokat, így a túlhajtott motor okozta rezgésre tippeltem. A lecsengés csak úgy eszembe jutott ezzel kapcsolatban. Ha csendesebb lehet tőle a motor, akkor gondoltam érdemes lehet kipróbálni, csak azt nem tudom melyik állásba kapcsoljam.
Ahhoz szét kéne bombázni az egész gépet, amit nem szeretnék. Ezért támadt az az ötletem, hogy valami selfmade elektronika közbeiktatásával kiküszöbölhető lenne a dolog. Szerintem nem a mechanikában keresendő hiba okozza a cakkos kontúrokat, így a túlhajtott motor okozta rezgésre tippeltem. A lecsengés csak úgy eszembe jutott ezzel kapcsolatban. Ha csendesebb lehet tőle a motor, akkor gondoltam érdemes lehet kipróbálni, csak azt nem tudom melyik állásba kapcsoljam.
Cím: Re:Léptetőmotor
Írta: 0cphxg8ns Dátum 2017 május 25, 07:01
Írta: 0cphxg8ns Dátum 2017 május 25, 07:01
Köszönöm mindenkinek a tippeket, véleményeket! [#worship]
Cím: Re:Léptetőmotor
Írta: 2dbfy8y Dátum 2017 május 25, 08:13
Írta: 2dbfy8y Dátum 2017 május 25, 08:13
Cikk-cakk oka a tb vezérlő lesz.
Nálam is olyan volt vele mint a varrógép, msd-vel egész máshogyan jár.
Erre más orvosság nincs.
Nálam is olyan volt vele mint a varrógép, msd-vel egész máshogyan jár.
Erre más orvosság nincs.
Cím: Re:Léptetőmotor
Írta: 3z4pi4rei Dátum 2017 május 25, 11:04
Írta: 3z4pi4rei Dátum 2017 május 25, 11:04
Ajjaj...
Tudnál nekem linket adni ezzel kapcsolatban?
Kép, méret, ár, stb...
Mert, ha nem fér be a mostani helyére, akkor esélytelen a csere.
Tudnál nekem linket adni ezzel kapcsolatban?
Kép, méret, ár, stb...
Mert, ha nem fér be a mostani helyére, akkor esélytelen a csere.
Cím: Re:Léptetőmotor
Írta: 2dbfy8y Dátum 2017 május 25, 14:12
Írta: 2dbfy8y Dátum 2017 május 25, 14:12
Nekem ilyenek voltak:
msd50-4.2 (http://www.webaruhaz.klavio.hu/?id=85b75cfc564c4822863dbd4884138991&p=termeklap&tkod=77)
Ennek az az egy a gondja, ha 2 tengely kell, akkor 2db kell belőle, ez egy tengelyt szolgál ki.
De nagyon jók régóta, és sokáig is használtam ilyent.
agy esetleg szervó van még, beállítani mondjuk azt nehezebb.
De annak aztán se hangja, és szépen is jár, ha jól be van hangolva.
msd50-4.2 (http://www.webaruhaz.klavio.hu/?id=85b75cfc564c4822863dbd4884138991&p=termeklap&tkod=77)
Ennek az az egy a gondja, ha 2 tengely kell, akkor 2db kell belőle, ez egy tengelyt szolgál ki.
De nagyon jók régóta, és sokáig is használtam ilyent.
agy esetleg szervó van még, beállítani mondjuk azt nehezebb.
De annak aztán se hangja, és szépen is jár, ha jól be van hangolva.
Cím: Re:Léptetőmotor
Írta: 3z4pi4rei Dátum 2017 május 25, 15:18
Írta: 3z4pi4rei Dátum 2017 május 25, 15:18
De ennél 1A a min. csúcsáram. Akkor nem lehet, hogy nekem a 2,2-t kéne venni?
És a kettő db hogy jön össze 1 LTP portra?
És a kettő db hogy jön össze 1 LTP portra?
Cím: Re:Léptetőmotor
Írta: 2dbfy8y Dátum 2017 május 25, 15:50
Írta: 2dbfy8y Dátum 2017 május 25, 15:50
Ha neked elég kisebb Amper erősségü is, persze akkor azt vegyél.
Simán 3, de 4db is mehet egy lpt portról.
Az enable jel lehet mindnél egy helyről.
Nekem 3Nm-es mocik mentek róla.
De az nem baj azért ha kicsit többet tud mint a motor.
És 32V-os toroidról járattam.
Simán 3, de 4db is mehet egy lpt portról.
Az enable jel lehet mindnél egy helyről.
Nekem 3Nm-es mocik mentek róla.
De az nem baj azért ha kicsit többet tud mint a motor.
És 32V-os toroidról járattam.
Cím: Re:Léptetőmotor
Írta: zip0ji0se Dátum 2017 június 10, 21:54
Írta: zip0ji0se Dátum 2017 június 10, 21:54
Sziasztok!
Kaptam cnc gép építéshez unipoláris motorokat, de lecserélném őket erősebb 23-ra. Legalábbis az x és y. A kérdésem a következő. Melyik jobb. A bi vagy uni és egy vezérlésen belül keverhető e a két fajta motor.
Üdv.
Kaptam cnc gép építéshez unipoláris motorokat, de lecserélném őket erősebb 23-ra. Legalábbis az x és y. A kérdésem a következő. Melyik jobb. A bi vagy uni és egy vezérlésen belül keverhető e a két fajta motor.
Üdv.
Cím: Re:Léptetőmotor
Írta: u6p5jr23k Dátum 2017 június 10, 22:00
Írta: u6p5jr23k Dátum 2017 június 10, 22:00
Szia.
Miért nem kötöd át bipolárisra?
Ha 6 vezetékes, akkor tudod hajtani soros bipolárisként. Ha 5 vezetékes, akkor vagy átkötöd, vagy marad az unipopáris vezérlő.
Ha motoronként külön vezérlőt használsz, szerintem nincs elvi akadálya az unipoláris és bipoláris vezérlés használatának. Az más kérdés, hogy egyformára nem fogod tudni beállítani a motorokat.
Miért nem kötöd át bipolárisra?
Ha 6 vezetékes, akkor tudod hajtani soros bipolárisként. Ha 5 vezetékes, akkor vagy átkötöd, vagy marad az unipopáris vezérlő.
Ha motoronként külön vezérlőt használsz, szerintem nincs elvi akadálya az unipoláris és bipoláris vezérlés használatának. Az más kérdés, hogy egyformára nem fogod tudni beállítani a motorokat.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 június 11, 08:56
Írta: 000000000 Dátum 2017 június 11, 08:56
Unipolárisban a motor nyomatékának maximum a 60%-val számolhatsz a bipoláris kötéshez képest.
Amúgy meg új unipoláris vezérlővel meg vagy 10 éve nem találkoztam. [#nevetes1]
Mellesleg az uni vagy bipoláris motor belül ugyanaz csak egyiken az összes tekercsvég ki van hozva míg a másikon belül van összekötve.
Mikor volt kedvem ezekkel tökölni akkor szétkaptam és a 5 vagy 6 vezetékesből csináltam 8 vezetékes motort.
Azt meg úgy köti az amber ahogy akarja, lehet soros bipoláris vagy párhuzamos, vagy unipoláris is.
Amúgy meg új unipoláris vezérlővel meg vagy 10 éve nem találkoztam. [#nevetes1]
Mellesleg az uni vagy bipoláris motor belül ugyanaz csak egyiken az összes tekercsvég ki van hozva míg a másikon belül van összekötve.
Mikor volt kedvem ezekkel tökölni akkor szétkaptam és a 5 vagy 6 vezetékesből csináltam 8 vezetékes motort.
Azt meg úgy köti az amber ahogy akarja, lehet soros bipoláris vagy párhuzamos, vagy unipoláris is.
Cím: Re:Léptetőmotor
Írta: ORCA17 Dátum 2017 június 11, 10:40
Írta: ORCA17 Dátum 2017 június 11, 10:40
Szép napot!
Az a kérdésem, hogy mi alapján dönthető el, hogy NEMA XX méretű egy stepper motor, ha az adatlapján nincs rajta.
P.l. ez a motor FL60STH86-2008BF:
(https://hobbicncforum.hu/uploaded_images/2017/06/tn_5d6d946xk73s3camb9shw_993.jpg) (https://hobbicncforum.hu/uploaded_images/2017/06/5d6d946xk73s3camb9shw_993.jpg)
Az a kérdésem, hogy mi alapján dönthető el, hogy NEMA XX méretű egy stepper motor, ha az adatlapján nincs rajta.
P.l. ez a motor FL60STH86-2008BF:
(https://hobbicncforum.hu/uploaded_images/2017/06/tn_5d6d946xk73s3camb9shw_993.jpg) (https://hobbicncforum.hu/uploaded_images/2017/06/5d6d946xk73s3camb9shw_993.jpg)
Cím: Re:Léptetőmotor
Írta: morvfer7 Dátum 2017 június 11, 10:45
Írta: morvfer7 Dátum 2017 június 11, 10:45
Ez egy Nema 24 motor
Itt van róla infó. (https://fullingmotor.en.alibaba.com/product/481487843-800529971/Nema_24_Hybrid_Stepper_Motor.html)
Itt van róla infó. (https://fullingmotor.en.alibaba.com/product/481487843-800529971/Nema_24_Hybrid_Stepper_Motor.html)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 június 11, 10:46
Írta: 000000000 Dátum 2017 június 11, 10:46
Mérd meg a pajzsot !
(https://hobbicncforum.hu/uploaded_images/2017/06/tn_w0zikefi2ecptjw8mkktx_705.jpg) (https://hobbicncforum.hu/uploaded_images/2017/06/w0zikefi2ecptjw8mkktx_705.jpg)
(https://hobbicncforum.hu/uploaded_images/2017/06/tn_w0zikefi2ecptjw8mkktx_705.jpg) (https://hobbicncforum.hu/uploaded_images/2017/06/w0zikefi2ecptjw8mkktx_705.jpg)
Cím: Re:Léptetőmotor
Írta: ORCA17 Dátum 2017 június 11, 10:58
Írta: ORCA17 Dátum 2017 június 11, 10:58
Kössz MORVFER7
Hiába kerestem, mindenütt csak a befoglaló méreteket és elektromos jellemzőket találtam [#worship]
Pálnak is köszi![#integet2]
Akkor az enyém NEMA24...most már tudok nyugodtan aludni[#wink]
Üdv
Csaba
Hiába kerestem, mindenütt csak a befoglaló méreteket és elektromos jellemzőket találtam [#worship]
Pálnak is köszi![#integet2]
Akkor az enyém NEMA24...most már tudok nyugodtan aludni[#wink]
Üdv
Csaba
Cím: Re:Léptetőmotor
Írta: zip0ji0se Dátum 2017 június 11, 20:52
Írta: zip0ji0se Dátum 2017 június 11, 20:52
Sziasztok!
Köszönöm a válaszokat mindkettőtöknek, akkor a bipoláris motorok lesznek a Nema 23-ok. A z tengelyét meg bipolárisra
kötöm.
Olyan kérdésem lenne még, hogy vezérlésre milyen meghajtót ajánlatok aminek elfogadható ára van. Nézegettem pár fajtát, de tanácstalan vagyok. Az elképzelés a következő lenne. Az y tengely két motorral a többi egyértelműen egy- egy. Később majd szeretnék az asztalon is egy meghajtást forgástestek megmunkálásra és kék lézert is hozzá. Hasonlóan, mint az X-Carve, vagy a Shapeoko.
Üdv.
Köszönöm a válaszokat mindkettőtöknek, akkor a bipoláris motorok lesznek a Nema 23-ok. A z tengelyét meg bipolárisra
kötöm.
Olyan kérdésem lenne még, hogy vezérlésre milyen meghajtót ajánlatok aminek elfogadható ára van. Nézegettem pár fajtát, de tanácstalan vagyok. Az elképzelés a következő lenne. Az y tengely két motorral a többi egyértelműen egy- egy. Később majd szeretnék az asztalon is egy meghajtást forgástestek megmunkálásra és kék lézert is hozzá. Hasonlóan, mint az X-Carve, vagy a Shapeoko.
Üdv.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 június 11, 21:06
Írta: 000000000 Dátum 2017 június 11, 21:06
Ha csak játszani akarsz akkor tökmindegy milyen.
Viszont ha komolyabban gondolod akkor csak Leadshine vezérlőt !
Viszont ha komolyabban gondolod akkor csak Leadshine vezérlőt !
Cím: Re:Léptetőmotor
Írta: 3z4pi4rei Dátum 2017 június 14, 18:42
Írta: 3z4pi4rei Dátum 2017 június 14, 18:42
Sziasztok!
Elkövettem egy hibát a hozzá nem értésemből adódóan...
A képen a felső a meglévő szíj a hozzávaló tárcsákkal az X tengelyen, alatta a GT2. Ugyebár köszönő viszonyban sincsenek.
Igénybevétel szempontjából le merhetem cserélni ezt a robusztus méretűt a GT2-re?
Egyébként ez milyen típusú?
(https://hobbicncforum.hu/uploaded_images/2017/06/tn_skcw6c446aj89zhbdavu_3680.jpg) (https://hobbicncforum.hu/uploaded_images/2017/06/skcw6c446aj89zhbdavu_3680.jpg)
Elkövettem egy hibát a hozzá nem értésemből adódóan...
A képen a felső a meglévő szíj a hozzávaló tárcsákkal az X tengelyen, alatta a GT2. Ugyebár köszönő viszonyban sincsenek.
Igénybevétel szempontjából le merhetem cserélni ezt a robusztus méretűt a GT2-re?
Egyébként ez milyen típusú?
(https://hobbicncforum.hu/uploaded_images/2017/06/tn_skcw6c446aj89zhbdavu_3680.jpg) (https://hobbicncforum.hu/uploaded_images/2017/06/skcw6c446aj89zhbdavu_3680.jpg)
Cím: Re:Léptetőmotor
Írta: RJancsi Dátum 2017 június 14, 22:12
Írta: RJancsi Dátum 2017 június 14, 22:12
Elég rosszul látszik, talán T5 (http://www.powerbelt.hu/products/t5) ?
Cím: Re:Léptetőmotor
Írta: vjanos Dátum 2017 június 14, 22:34
Írta: vjanos Dátum 2017 június 14, 22:34
Én a kerek fogprofil miatt HTD 5M-re tippelem.
Ha a lézert rángatja, szerintem cserélheted GT2-re, bár abból jobb lenne a fehér, PU anyagú acélszálas.
Ez az olcsófekete nyúlani fog, készülj fel rá, hogy feszíteni kell később.
Ha a lézert rángatja, szerintem cserélheted GT2-re, bár abból jobb lenne a fehér, PU anyagú acélszálas.
Ez az olcsófekete nyúlani fog, készülj fel rá, hogy feszíteni kell később.
Cím: Re:Léptetőmotor
Írta: 4hny8ry2z Dátum 2017 június 27, 16:26
Írta: 4hny8ry2z Dátum 2017 június 27, 16:26
Sziaszok!
Hosszú évek óta először jöttem ide vissza és csodálkozva látom, hogy nincs hobbycnc oldal, csak a fórum. Aztán megtaláltam az archív oldalt.
Naszóval a gondom az ogy annó vettem itt egy léptetőmotort és most kéne még egy ilyen jószág, de ugye nem tudom honnan lehetne már rendelni, hisz archívba van téve minden!
A régi motor:
Típus: 23LC051-025-8W-xx.xx-1.0
Nyomaték: 1.0 Nm
Névleges áram: 1.25 A
Tekercs ellenállás: 0.9 Ohm
Alap feszültség: 1.1 V
Induktivitás: 1.5 mH
Kivezetések száma: 8
Hossz: 51 mm
Tengelyvégek: F8 vagy F8+F8
Súly: 0.63 kg vagy 0.64 kg.
Köszi a tippeket
Zsolt
Hosszú évek óta először jöttem ide vissza és csodálkozva látom, hogy nincs hobbycnc oldal, csak a fórum. Aztán megtaláltam az archív oldalt.
Naszóval a gondom az ogy annó vettem itt egy léptetőmotort és most kéne még egy ilyen jószág, de ugye nem tudom honnan lehetne már rendelni, hisz archívba van téve minden!
A régi motor:
Típus: 23LC051-025-8W-xx.xx-1.0
Nyomaték: 1.0 Nm
Névleges áram: 1.25 A
Tekercs ellenállás: 0.9 Ohm
Alap feszültség: 1.1 V
Induktivitás: 1.5 mH
Kivezetések száma: 8
Hossz: 51 mm
Tengelyvégek: F8 vagy F8+F8
Súly: 0.63 kg vagy 0.64 kg.
Köszi a tippeket
Zsolt
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 június 27, 16:34
Írta: svejk Dátum 2017 június 27, 16:34
ha gyorsan kell akkor pl. a Variometrumnál. (http://variometrum.hu/meghajtas-kategoria)
Cím: Re:Léptetőmotor
Írta: 4hny8ry2z Dátum 2017 június 27, 16:50
Írta: 4hny8ry2z Dátum 2017 június 27, 16:50
igen itt is láttam hasonlót http://www.cncdrive.hu/shop/index.php?productID=464
de ezek 4 kivezetésesek, ez amit meg itt rendeltem annó 8 vezetékes volt!
És ezt a 4 vezetékest nem tudom bekötni a H1 vezérlőbe :(
de ezek 4 kivezetésesek, ez amit meg itt rendeltem annó 8 vezetékes volt!
És ezt a 4 vezetékest nem tudom bekötni a H1 vezérlőbe :(
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 június 27, 17:10
Írta: svejk Dátum 2017 június 27, 17:10
Szerintem van köztük 8 kivetéses is, amit bárhogy beköthetsz, de hátha lesz itt valakinek a fórumon felesleges.
Kérdezd meg az adok-veszek topicban!
Ma már nem divat és értéke sem nagyon van az unipoláris motoroknak.
Kérdezd meg az adok-veszek topicban!
Ma már nem divat és értéke sem nagyon van az unipoláris motoroknak.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 június 27, 17:11
Írta: svejk Dátum 2017 június 27, 17:11
No de nézd csak, a Klavio-nak van raktáron! (http://www.webaruhaz.klavio.hu/?id=85b75cfc564c4822863dbd4884138991&p=termeklap&tkod=31)
Cím: Re:Léptetőmotor
Írta: 4hny8ry2z Dátum 2017 június 27, 21:15
Írta: 4hny8ry2z Dátum 2017 június 27, 21:15
A H1 vezérlő adott és az csak unipolárisan működik :(
Annó ez volt az elérhető számomra így adott hogy ehhez kell alkalmazkodnom.
A gép legalább 8-10 éve áll, az egyik motor adta meg magát, most leporoltam és gondoltam itt az ideje hogy új motort kapjon.
Köszi az infókat!
Annó ez volt az elérhető számomra így adott hogy ehhez kell alkalmazkodnom.
A gép legalább 8-10 éve áll, az egyik motor adta meg magát, most leporoltam és gondoltam itt az ideje hogy új motort kapjon.
Köszi az infókat!
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 június 27, 21:23
Írta: svejk Dátum 2017 június 27, 21:23
No de a Klavios linken 8 kivezetése van, azt be tudod kötni.
Cím: Re:Léptetőmotor
Írta: 4hny8ry2z Dátum 2017 június 27, 21:53
Írta: 4hny8ry2z Dátum 2017 június 27, 21:53
igen-igen az jó lesz, köszi! :)
Cím: Re:Léptetőmotor
Írta: 3z4pi4rei Dátum 2017 július 03, 18:54
Írta: 3z4pi4rei Dátum 2017 július 03, 18:54
Sziasztok!
Ezerszer lassabban, mint gondoltam, de ma elkészült az X tengely bordás kerék / szíj cseréje / átalakítása. Dunsztom sincs mennyire kéne megfeszíteni... A finomabb mozgás ára kb 45 mm hasznos út veszteség, de másképp nem volt megoldható. Remélem hozza majd az elvárásokat. A héten megveszem a Leadshine vezérlőket is.
(https://hobbicncforum.hu/uploaded_images/2017/07/tn_n2m30a6pgibp2e5hzspk_3680.jpg) (https://hobbicncforum.hu/uploaded_images/2017/07/n2m30a6pgibp2e5hzspk_3680.jpg) (https://hobbicncforum.hu/uploaded_images/2017/07/tn_aeg3qzg0fugmw8a0gsj_3680.jpg) (https://hobbicncforum.hu/uploaded_images/2017/07/aeg3qzg0fugmw8a0gsj_3680.jpg)
Ezerszer lassabban, mint gondoltam, de ma elkészült az X tengely bordás kerék / szíj cseréje / átalakítása. Dunsztom sincs mennyire kéne megfeszíteni... A finomabb mozgás ára kb 45 mm hasznos út veszteség, de másképp nem volt megoldható. Remélem hozza majd az elvárásokat. A héten megveszem a Leadshine vezérlőket is.
(https://hobbicncforum.hu/uploaded_images/2017/07/tn_n2m30a6pgibp2e5hzspk_3680.jpg) (https://hobbicncforum.hu/uploaded_images/2017/07/n2m30a6pgibp2e5hzspk_3680.jpg) (https://hobbicncforum.hu/uploaded_images/2017/07/tn_aeg3qzg0fugmw8a0gsj_3680.jpg) (https://hobbicncforum.hu/uploaded_images/2017/07/aeg3qzg0fugmw8a0gsj_3680.jpg)
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2017 július 03, 19:11
Írta: PSoft Dátum 2017 július 03, 19:11
Te is elkövetted azt a hibát, hogy "el" feszítesz a motortengely hajtó bordáskerekétől.:(
Persze, az attól még...jó lesz!
Én, egy feszítőkereket tettem volna, az eredeti mellé,(ha már meg kellet hagyni az eredetit)a kocsira rögzítéssel ellentétes oldalra. A hátul, oda-vissza futó szíj, mehetne akár szögben feszítve is, ha elfér. Úgy, megmaradt volna a hasznos, eredeti úthosszad.
[#wave]
Persze, az attól még...jó lesz!
Én, egy feszítőkereket tettem volna, az eredeti mellé,(ha már meg kellet hagyni az eredetit)a kocsira rögzítéssel ellentétes oldalra. A hátul, oda-vissza futó szíj, mehetne akár szögben feszítve is, ha elfér. Úgy, megmaradt volna a hasznos, eredeti úthosszad.
[#wave]
Cím: Re:Léptetőmotor
Írta: 3z4pi4rei Dátum 2017 július 03, 19:25
Írta: 3z4pi4rei Dátum 2017 július 03, 19:25
Az "elfeszítő", azaz a piros alkatrész és a konstrukció, az gyári, én csak kicsit gatyába ráztam...
A kocsin történő rögzítés síkjába kellett vezetni / kényszeríteni a szíjat, így más megoldás nem volt.
A piros konzolon kívül mind a 4 kerék új, nem a gyári.
A kocsin történő rögzítés síkjába kellett vezetni / kényszeríteni a szíjat, így más megoldás nem volt.
A piros konzolon kívül mind a 4 kerék új, nem a gyári.
Cím: Re:Léptetőmotor
Írta: hnpuikupi Dátum 2017 július 03, 20:01
Írta: hnpuikupi Dátum 2017 július 03, 20:01
Sziasztok!
Volna egy kérdésem.
Most szedegem össze a gépem alkatrészeit. Rendeltem egy léptetőmotrot is, de felmerült egy kérdés.
A motor kódja: 85HSE4N-BC38
A gond az, hogy 86HSE4H - nak kellene lennie.
Tudja valaki, hogy mi ez a "85"-ös verzió?
(https://hobbicncforum.hu/uploaded_images/2017/07/tn_zw5tatc70ms2tvikenf9_5301.jpg) (https://hobbicncforum.hu/uploaded_images/2017/07/zw5tatc70ms2tvikenf9_5301.jpg)
Volna egy kérdésem.
Most szedegem össze a gépem alkatrészeit. Rendeltem egy léptetőmotrot is, de felmerült egy kérdés.
A motor kódja: 85HSE4N-BC38
A gond az, hogy 86HSE4H - nak kellene lennie.
Tudja valaki, hogy mi ez a "85"-ös verzió?
(https://hobbicncforum.hu/uploaded_images/2017/07/tn_zw5tatc70ms2tvikenf9_5301.jpg) (https://hobbicncforum.hu/uploaded_images/2017/07/zw5tatc70ms2tvikenf9_5301.jpg)
Cím: Re:Léptetőmotor
Írta: izbeki Dátum 2017 július 03, 20:04
Írta: izbeki Dátum 2017 július 03, 20:04
Szerintem elnyomtatták, 86 akart lenni.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2017 július 03, 20:10
Írta: PSoft Dátum 2017 július 03, 20:10
Az "elfeszítésre" a második képeden, a motortengely melletti kerékre gondoltam.(elemeli a szíjat a keréktől, így kevesebb hajtó fog kapcsolódik a szíjhoz)
De mint írtam, jó az úgy is![#wave]
De mint írtam, jó az úgy is![#wave]
Cím: Re:Léptetőmotor
Írta: hnpuikupi Dátum 2017 július 03, 20:12
Írta: hnpuikupi Dátum 2017 július 03, 20:12
Grrr, kínai cucc. Elvileg korrekt csapat, de ezt soha nem lehet tudni.
Feldobtam nekik is a kérdést, kíváncsi leszek a magyarázatra ...
Elvileg "JSS" gyártmánynak kellene lennie.
Feldobtam nekik is a kérdést, kíváncsi leszek a magyarázatra ...
Elvileg "JSS" gyártmánynak kellene lennie.
Cím: Re:Léptetőmotor
Írta: svager Dátum 2017 július 03, 21:08
Írta: svager Dátum 2017 július 03, 21:08
Szerintem nem kell aggódni,ezt a magyar kereskedők is alkalmazzák,Te megrendeled az ismertebb árút,és Ő meg megkeresi a legolcsóbb beszerzési forrást,ugyanannak a gyártónak más, pl.a kínai belpiacra gyártott változatát.
Ezzel nincs is gond,hogy simán lehúz,mivel még olcsóbban tudja beszerezni ezeket.
A gond majd ott kezdődik mikor szeretnéd beállítani a szoftverrel és kiderül,hogy csak kínai szoftverrel működik.[#wink]
Ezzel nincs is gond,hogy simán lehúz,mivel még olcsóbban tudja beszerezni ezeket.
A gond majd ott kezdődik mikor szeretnéd beállítani a szoftverrel és kiderül,hogy csak kínai szoftverrel működik.[#wink]
Cím: Re:Léptetőmotor
Írta: hnpuikupi Dátum 2017 július 03, 21:19
Írta: hnpuikupi Dátum 2017 július 03, 21:19
Nah, ne már :) Ennél a szteppernél csak nem lesz ilyen gond ..
XHC vezérlő + Mach4; szerintem csak ki tudja hajtani a hozzá való HSS86-os vezérlőt
(Még nem tudom kipróbálni, mert a tápegység még nem ért ide)
XHC vezérlő + Mach4; szerintem csak ki tudja hajtani a hozzá való HSS86-os vezérlőt
(Még nem tudom kipróbálni, mert a tápegység még nem ért ide)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 július 03, 21:23
Írta: svejk Dátum 2017 július 03, 21:23
No! Van Mach4-ed?
Hogy tetszik?
Hogy tetszik?
Cím: Re:Léptetőmotor
Írta: hnpuikupi Dátum 2017 július 03, 21:35
Írta: hnpuikupi Dátum 2017 július 03, 21:35
Vettem egy XHC vezérlőt ami csak a Mach4-el hajlandó működni :I (usb miatt lett ez)
Még nem mélyültem el benne, demó módban próbálgattam ezzel a vezérlővel.
Úgyhogy ha tetszik ha nem, tetszeni fog :) ([#vigyor3])
Nem próbáltam a Mach3-at, szerintem a Mach4-is elfogadható szoftver, bár még nincs annyira bejáratva mint az elődje.
Vannak vele rossz tapasztalatok? (Ha lehet ne nagyon idegesítsetek fel [#sniffles])
Még nem mélyültem el benne, demó módban próbálgattam ezzel a vezérlővel.
Úgyhogy ha tetszik ha nem, tetszeni fog :) ([#vigyor3])
Nem próbáltam a Mach3-at, szerintem a Mach4-is elfogadható szoftver, bár még nincs annyira bejáratva mint az elődje.
Vannak vele rossz tapasztalatok? (Ha lehet ne nagyon idegesítsetek fel [#sniffles])
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 július 03, 22:16
Írta: 000000000 Dátum 2017 július 03, 22:16
Építettem gépet Mach 4-el is és azóta sem hívtak, hogy probléma lenne vele.
A Mach hardveres vezérlő része valami amerikai LAN-os cucc volt.
Már nem emlékszem a pontos típusra.
A Mach hardveres vezérlő része valami amerikai LAN-os cucc volt.
Már nem emlékszem a pontos típusra.
Cím: Re:Léptetőmotor
Írta: hnpuikupi Dátum 2017 július 04, 08:59
Írta: hnpuikupi Dátum 2017 július 04, 08:59
Én se gondolom, hogy használhatatlan lenne. Közbe eszembe jutott, hogy nem is az USB miatt, hanem a W10 miatt döntöttem mellette. Túl sok vezérlő kártyát nem találtam hozzá, az XHC volt a legszimpatikusabb.
Mondjuk volt gond a beüzemelésével, egyenlőre úgy látszik, hogy a Mach4 driverei ütköznek az arduinoval. Mondjuk ennek nem nagyon néztem utána, de látszólag van ilyen baja. (lehet még integrált usb3 ütközés is)
Jut eszembe, nem találtam rá, hogy hogyan lehet megváltoztatni a grafikus ablak hátterét. Valamiért az én laptopomon alig látni a kirajzolt pályákat, jó lenne valami más szín hozzá.(mondjuk lehet, hogy a demo mód miatt nem lehet)
Mondjuk volt gond a beüzemelésével, egyenlőre úgy látszik, hogy a Mach4 driverei ütköznek az arduinoval. Mondjuk ennek nem nagyon néztem utána, de látszólag van ilyen baja. (lehet még integrált usb3 ütközés is)
Jut eszembe, nem találtam rá, hogy hogyan lehet megváltoztatni a grafikus ablak hátterét. Valamiért az én laptopomon alig látni a kirajzolt pályákat, jó lenne valami más szín hozzá.(mondjuk lehet, hogy a demo mód miatt nem lehet)
Cím: Re:Léptetőmotor
Írta: 3z4pi4rei Dátum 2017 július 04, 17:08
Írta: 3z4pi4rei Dátum 2017 július 04, 17:08
No így már értem az "elfeszítés" fogalmát.
A motor a kocsi síkjába történő áthelyezése kategorikusan lehetetlen és ez volt a legkisebb mechanikán történő fabrikálással (1-1 db furat) járó, általam elképzelt legjobbnak tűnő megoldás... A szíjnak muszáj a kocsi síkjában maradni, nem?
(https://hobbicncforum.hu/uploaded_images/2017/07/tn_txbj0zqjwqnc6a7h2waq_3680.jpg) (https://hobbicncforum.hu/uploaded_images/2017/07/txbj0zqjwqnc6a7h2waq_3680.jpg)
A motor a kocsi síkjába történő áthelyezése kategorikusan lehetetlen és ez volt a legkisebb mechanikán történő fabrikálással (1-1 db furat) járó, általam elképzelt legjobbnak tűnő megoldás... A szíjnak muszáj a kocsi síkjában maradni, nem?
(https://hobbicncforum.hu/uploaded_images/2017/07/tn_txbj0zqjwqnc6a7h2waq_3680.jpg) (https://hobbicncforum.hu/uploaded_images/2017/07/txbj0zqjwqnc6a7h2waq_3680.jpg)
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2017 július 04, 17:28
Írta: PSoft Dátum 2017 július 04, 17:28
A húzó oldalon igen, de a "hátsó" oldalon, nem feltétlen.
(erre gondoltam lentebb)
Nem látom a képeden, hol/hogy csatalakozik a szíj a kocsihoz.
(erre gondoltam lentebb)
Nem látom a képeden, hol/hogy csatalakozik a szíj a kocsihoz.
Cím: Re:Léptetőmotor
Írta: 3z4pi4rei Dátum 2017 július 10, 18:45
Írta: 3z4pi4rei Dátum 2017 július 10, 18:45
Sziasztok!
Mivel az előző kialakításhoz képest most érezhetően több erő kell a mozgatáshoz, így bekapcsoltam a gépet.
Természetesen még az eredeti kialakítás beállításai, ennél gyorsabb volt azzal. Kb mint Y irányban. Ha minden jól megy, akkor a jövő hét végén ki lesz cserélve a vezérlés és megtörténik a kalibrálás.
Azt honnan lehet megtudni, hogy ha erőlködik a motor?
Mivel az előző kialakításhoz képest most érezhetően több erő kell a mozgatáshoz, így bekapcsoltam a gépet.
Természetesen még az eredeti kialakítás beállításai, ennél gyorsabb volt azzal. Kb mint Y irányban. Ha minden jól megy, akkor a jövő hét végén ki lesz cserélve a vezérlés és megtörténik a kalibrálás.
Azt honnan lehet megtudni, hogy ha erőlködik a motor?
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2017 augusztus 23, 09:08
Írta: Rabb Ferenc Dátum 2017 augusztus 23, 09:08
A "Lézer" topikban taglalt "lendkerekes" léptetőmotor jó dolog ha a sebesség és a gyorsulás nem szempont. Egy fórumtársunk jóvoltából sok ilyen motor forgott közkézen pár éve.
Nekem is ilyen volt, de olyan tetű lassú, hogy legyomláltam róla a tárcsát. A lépéstévesztés nélküli sebességet duplájára, a gyorsulást kb háromszorosára tudtam növelni. A rezonancia nekem a zajon kívül nem okozott gondot. De azt a KRESS űberelte :)
(https://hobbicncforum.hu/uploaded_images/2017/08/tn_4yqgi9gmnzie9j8b3khs_1406.jpg) (https://hobbicncforum.hu/uploaded_images/2017/08/4yqgi9gmnzie9j8b3khs_1406.jpg)
Nekem is ilyen volt, de olyan tetű lassú, hogy legyomláltam róla a tárcsát. A lépéstévesztés nélküli sebességet duplájára, a gyorsulást kb háromszorosára tudtam növelni. A rezonancia nekem a zajon kívül nem okozott gondot. De azt a KRESS űberelte :)
(https://hobbicncforum.hu/uploaded_images/2017/08/tn_4yqgi9gmnzie9j8b3khs_1406.jpg) (https://hobbicncforum.hu/uploaded_images/2017/08/4yqgi9gmnzie9j8b3khs_1406.jpg)
Cím: Re:Léptetőmotor
Írta: 0cphxg8ns Dátum 2017 augusztus 23, 13:31
Írta: 0cphxg8ns Dátum 2017 augusztus 23, 13:31
Tiszteletem!
Szeretnék újítani, és ehhez nagyobb léptetők dukálnak. Kaptam jó áron most nema23-as, 3.6A-es léptető motorokat, de nincs hozzá meghajtóm.
Ehhez szeretnék egy kis szakmai tanácsot kérni.
Milyet érdemes venni, akár a jövőre nézve nagyobb motorokhoz is?
Kínából van a TB6600, DM542, DM3230, és sorolhatnám...
Nem tudok dűlőre jutni, melyik "jó".
Gondolok itt elsősorban az élettartamra, és a melegedés (leégés) problémára.
Mindennemű segítséget előre is köszönök.
Köszönettel: Tamás
Szeretnék újítani, és ehhez nagyobb léptetők dukálnak. Kaptam jó áron most nema23-as, 3.6A-es léptető motorokat, de nincs hozzá meghajtóm.
Ehhez szeretnék egy kis szakmai tanácsot kérni.
Milyet érdemes venni, akár a jövőre nézve nagyobb motorokhoz is?
Kínából van a TB6600, DM542, DM3230, és sorolhatnám...
Nem tudok dűlőre jutni, melyik "jó".
Gondolok itt elsősorban az élettartamra, és a melegedés (leégés) problémára.
Mindennemű segítséget előre is köszönök.
Köszönettel: Tamás
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 augusztus 23, 19:08
Írta: svejk Dátum 2017 augusztus 23, 19:08
Ja-ja, egészen Hollandiától cipeltem őket. :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 23, 21:56
Írta: 000000000 Dátum 2017 augusztus 23, 21:56
Lendkerék kinézete van , de az egy lengéscsillapító [#papakacsint]
Mivel a motor... de beszéljen inkább ez a videó
Mivel a motor... de beszéljen inkább ez a videó
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2017 augusztus 23, 22:40
Írta: jani300 Dátum 2017 augusztus 23, 22:40
Csak kibic vagyok a témában , de műszakilag nézve ez inkább értelmesnek tűnik :)
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2017 augusztus 23, 22:49
Írta: Rabb Ferenc Dátum 2017 augusztus 23, 22:49
Köszönöm az ismételt felvilágosítást! Idézőjel bezárva...
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2017 augusztus 24, 05:26
Írta: ANTAL GÁBOR Dátum 2017 augusztus 24, 05:26
Szervusz ! Emlékszel hogy hogyan kapcsolódott a tengelyhez a tárcsa ? Ott kell valami trükknek lennie....
Cím: Re:Léptetőmotor
Írta: remrendes Dátum 2017 augusztus 24, 07:05
Írta: remrendes Dátum 2017 augusztus 24, 07:05
Talan, mint az autokon a kettos tomegu lendkerek?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 24, 07:33
Írta: 000000000 Dátum 2017 augusztus 24, 07:33
Na az még egy elbaszott valami !
Mivel az autóknál a főtengelyt már nem kovácsolják mint régen hanem öntik és forgácsolják.
Ezért van szükség a kettős tömegű istenverésére !
Mert a dugattyúk is halálra le vannak könnyítve így a tömegerők nincsenek kiegyenlítve és a keletkező rezonancia kettétörné a főtengelyt.
(mellékelt ábrán látható egy modern motor dugattyúja, nincs is oldala)
Erre kell ez a rugós gumis, plusz némelyikben ilyen hangvilla szerű végén kis tömegekkel csillapítók is vannak.
Aztán ehhez jön a motorgyilkos vezetési stílus amikor nem vált vissza a paraszt, hanem 5.-ben akarja gyorsítani szinte alapjáratról.
(https://hobbicncforum.hu/uploaded_images/2017/08/tn_2k8mceehwfv86iuuscnp9_705.jpg) (https://hobbicncforum.hu/uploaded_images/2017/08/2k8mceehwfv86iuuscnp9_705.jpg)
Mivel az autóknál a főtengelyt már nem kovácsolják mint régen hanem öntik és forgácsolják.
Ezért van szükség a kettős tömegű istenverésére !
Mert a dugattyúk is halálra le vannak könnyítve így a tömegerők nincsenek kiegyenlítve és a keletkező rezonancia kettétörné a főtengelyt.
(mellékelt ábrán látható egy modern motor dugattyúja, nincs is oldala)
Erre kell ez a rugós gumis, plusz némelyikben ilyen hangvilla szerű végén kis tömegekkel csillapítók is vannak.
Aztán ehhez jön a motorgyilkos vezetési stílus amikor nem vált vissza a paraszt, hanem 5.-ben akarja gyorsítani szinte alapjáratról.
(https://hobbicncforum.hu/uploaded_images/2017/08/tn_2k8mceehwfv86iuuscnp9_705.jpg) (https://hobbicncforum.hu/uploaded_images/2017/08/2k8mceehwfv86iuuscnp9_705.jpg)
Cím: Re:Léptetőmotor
Írta: ywathzay Dátum 2017 augusztus 24, 09:13
Írta: ywathzay Dátum 2017 augusztus 24, 09:13
-off-
Kovácsolt dugattyút régen is inkább csak a versenytechnikában, ill az arra érdemes járművekben használtak. Amúgy ilyen alacsony dugattyúkat motorkerékpárokban már igen régóta használnak.
Tudtommal a kettős tömegűt nem a dugattyú miatt, hanem a "komfortérzet" fokozása miatt vezették be. Miután angol kutatók bebizonyították, hogy nem szereti a paraszt ha a dízel rázza magát -mert azt ugye kis fordulaton rötyögtették- ezért a mérnököknek ki kellett fejleszteni valamit, ami ezt ellensúlyozza. Persze ezáltal ami soha nem ment tönkre, így van egy újabb méregdrága alkatrész amit el lehet adni. Ha nem jól mondtam valamit, kérem ne kövezzetek meg.
-on-
Kovácsolt dugattyút régen is inkább csak a versenytechnikában, ill az arra érdemes járművekben használtak. Amúgy ilyen alacsony dugattyúkat motorkerékpárokban már igen régóta használnak.
Tudtommal a kettős tömegűt nem a dugattyú miatt, hanem a "komfortérzet" fokozása miatt vezették be. Miután angol kutatók bebizonyították, hogy nem szereti a paraszt ha a dízel rázza magát -mert azt ugye kis fordulaton rötyögtették- ezért a mérnököknek ki kellett fejleszteni valamit, ami ezt ellensúlyozza. Persze ezáltal ami soha nem ment tönkre, így van egy újabb méregdrága alkatrész amit el lehet adni. Ha nem jól mondtam valamit, kérem ne kövezzetek meg.
-on-
Cím: Re:Léptetőmotor
Írta: remrendes Dátum 2017 augusztus 24, 09:58
Írta: remrendes Dátum 2017 augusztus 24, 09:58
Szinten off.
Az a dugattyu ott van kikonnyitve, ahol nem tamaszkodik a hengerfalra, a csapszegre merolegesen.
Igen, sokat javit a komforterzeten is, de sokkal tobb forgattyustengely es valto csere is lenne nelkule.
Az a dugattyu ott van kikonnyitve, ahol nem tamaszkodik a hengerfalra, a csapszegre merolegesen.
Igen, sokat javit a komforterzeten is, de sokkal tobb forgattyustengely es valto csere is lenne nelkule.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 24, 17:07
Írta: 000000000 Dátum 2017 augusztus 24, 17:07
Itt elmondják miért is kell az a sz*r !
Köze nincs ahhoz amit mondasz !
Köze nincs ahhoz amit mondasz !
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2017 augusztus 24, 17:16
Írta: jani300 Dátum 2017 augusztus 24, 17:16
autóm :) (https://www.google.hu/search?q=passat+kombi+1982&oq=passat+combi+1982&aqs=chrome.1.69i57j0l3.26577j0j4&sourceid=chrome&ie=UTF-8)
Egyre biztosabb vagyok benne , hogy ennél már csak rosszabbat tudnak gyártani :)
Egyre biztosabb vagyok benne , hogy ennél már csak rosszabbat tudnak gyártani :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 24, 18:20
Írta: 000000000 Dátum 2017 augusztus 24, 18:20
Teljesen igazd van, ezek a a mechanikus rezgés csillapítók lerontják a léptetőmotor dinamikáját, így ez egy elavult, idejét múlt technika.
A megoldás az, hogy az egész lépéses üzemmódot egy léptető motor esetében el kell kerülni. A mai vezérlőkön 2-3 másodperc alatt beállítható 400, 800, 1600, vagy akármilyen más felbontás. Majd teszek fel olyan Robsy motordinamikai mérési eredményeket, ahol ez remekül látszik a motor valós pozíció adatai kapcsán.
A megoldás az, hogy az egész lépéses üzemmódot egy léptető motor esetében el kell kerülni. A mai vezérlőkön 2-3 másodperc alatt beállítható 400, 800, 1600, vagy akármilyen más felbontás. Majd teszek fel olyan Robsy motordinamikai mérési eredményeket, ahol ez remekül látszik a motor valós pozíció adatai kapcsán.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 24, 18:30
Írta: 000000000 Dátum 2017 augusztus 24, 18:30
Ez így egyáltalán nem fedi a valóságot !
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 augusztus 24, 18:51
Írta: 4ybj8h3c8 Dátum 2017 augusztus 24, 18:51
Ez igaz, de mi a megoldás arra, amikor a léptetővezérlő jel nélkül visszakarmolja a tartóáramot, a nyüves ISEL Z tengely meg a laza 20 kilójával elindul lefelé.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 24, 19:16
Írta: 000000000 Dátum 2017 augusztus 24, 19:16
Az a megoldás, hogy be kell tartani a léptető motorhajtás méretezés elemei szabályait, és ennek kapcsán helyesen kell kiválasztani az adott tengely hajtáslánc elemeit.
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 augusztus 24, 19:37
Írta: 4ybj8h3c8 Dátum 2017 augusztus 24, 19:37
Ez valóban megoldás. Megadnád az ISEL címét, átpostázom nekik az aggályodat.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 24, 19:51
Írta: 000000000 Dátum 2017 augusztus 24, 19:51
Ez jóóó ! [#hehe]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 24, 20:13
Írta: 000000000 Dátum 2017 augusztus 24, 20:13
ISEL Hungária Kft.
Cím: 8200 Veszprém,
József Attila u. 38.
Telefon: 88/568-030
Skype:
lehoczki711
iselhun
iselmark
Csak neked ! [#papakacsint]
Cím: 8200 Veszprém,
József Attila u. 38.
Telefon: 88/568-030
Skype:
lehoczki711
iselhun
iselmark
Csak neked ! [#papakacsint]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 24, 20:20
Írta: 000000000 Dátum 2017 augusztus 24, 20:20
Nekem semmilyen aggályom nincs, tudod a műszaki életben pont az a szép, hogy eléggé objektív. Így ha HELYESEN megtanultad, ismered, érted, tudod egy adott témakör alap összefüggéseit, nem lehet gondod.
Mellesleg semmilyen adatot nem írtál, így még csak utána se tudok számolni, mi lehet a visszapörgés problémád oka.
Valószínűleg valamit te rontottál el, vagy változtattál meg a gépeden.
Ugyanis hirtelen számolással egy példa kapcsán az a helyzet, hogy egy kis vacak 1 Nm-es tartónyomatékú léptetőmotor is már egy 5 mm menetemelkedésű direkt hajtású golyósorsó esetén ~128 kg tömeget képes megtartani. Ez ugye 6.4-szeresen több, mint a 20 kg.
Mellesleg semmilyen adatot nem írtál, így még csak utána se tudok számolni, mi lehet a visszapörgés problémád oka.
Valószínűleg valamit te rontottál el, vagy változtattál meg a gépeden.
Ugyanis hirtelen számolással egy példa kapcsán az a helyzet, hogy egy kis vacak 1 Nm-es tartónyomatékú léptetőmotor is már egy 5 mm menetemelkedésű direkt hajtású golyósorsó esetén ~128 kg tömeget képes megtartani. Ez ugye 6.4-szeresen több, mint a 20 kg.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 24, 20:24
Írta: 000000000 Dátum 2017 augusztus 24, 20:24
A mese helyett valami objetív érv???[#nevetes1]
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 augusztus 24, 20:28
Írta: 4ybj8h3c8 Dátum 2017 augusztus 24, 20:28
Szerintem is én rontottam el valamit egy gyári gépen.
Ebben megegyeztünk.
Kösz a szokásos nesze semmi fogd meg jól típusú segítséget.
Ebben megegyeztünk.
Kösz a szokásos nesze semmi fogd meg jól típusú segítséget.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 24, 20:28
Írta: 000000000 Dátum 2017 augusztus 24, 20:28
Hogy is szoktad írni?
Nincs kellő szakmai alázat ehhez ! [#eplus2]
Csak vakló bátorságával osztod itt az észt ! [#eplus2]
Nincs kellő szakmai alázat ehhez ! [#eplus2]
Csak vakló bátorságával osztod itt az észt ! [#eplus2]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 24, 20:38
Írta: 000000000 Dátum 2017 augusztus 24, 20:38
Konkrét példát írtam, te meg semmilyen adatot nem írtál most se. Nem tudok többet segíteni neked, és kérlek, a hazug, rosszindulatú következtetéseidet velem kapcsolatban mellőzzed.
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 augusztus 24, 20:58
Írta: 4ybj8h3c8 Dátum 2017 augusztus 24, 20:58
Ez egy ilyen világ. Leírom az igazat, ami néha fájdalmas annak akit érint. Ez van.
Cím: Re:Léptetőmotor
Írta: Sanyi Bá Dátum 2017 augusztus 24, 21:11
Írta: Sanyi Bá Dátum 2017 augusztus 24, 21:11
ISEL CNC gépem van és a Z tengelyt úgy csinálták meg hogy egy rugó tartja egyensúlyba, ami a golyósorsóra van szerelve. Karbantartáskor lefogom fényképezni.
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 augusztus 24, 21:30
Írta: 4ybj8h3c8 Dátum 2017 augusztus 24, 21:30
Az enyémen fék van a motortengelyen, de mint ezt Tibor helyesen írta, ez lassítja a gépet.
Cím: Re:Léptetőmotor
Írta: Kisamotors Dátum 2017 augusztus 24, 22:35
Írta: Kisamotors Dátum 2017 augusztus 24, 22:35
Pál, ez kicsit demagóg volt, nem is túl pontos.
Nem a mérnökökkel van a baj elsősorban, hanem a pénzügyi osztályon.
Nem akarok itt offolni.
Nem a mérnökökkel van a baj elsősorban, hanem a pénzügyi osztályon.
Nem akarok itt offolni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 25, 07:29
Írta: 000000000 Dátum 2017 augusztus 25, 07:29
Azon, hogy ki demagog vagy sem, gondolkozz el egy picit !
(http://www.gotl1ke.com/media/wp-content/uploads/2012/02/1328570077.5468-engineer-f.jpg)
(http://www.gotl1ke.com/media/wp-content/uploads/2012/02/1328570077.5468-engineer-f.jpg)
Cím: Re:Léptetőmotor
Írta: remrendes Dátum 2017 augusztus 25, 07:33
Írta: remrendes Dátum 2017 augusztus 25, 07:33
Motort vagy vezerlot probaltal felcserelni? Csak hogy szukujon a kor.
Cím: Re:Léptetőmotor
Írta: Zozi Dátum 2017 augusztus 25, 07:36
Írta: Zozi Dátum 2017 augusztus 25, 07:36
Picit más téma... 48v tb6600 vs 12v tmc2100
(https://hobbicncforum.hu/uploaded_images/2017/08/tn_6dikbp0ps08pa90zudcg_2702.png) (https://hobbicncforum.hu/uploaded_images/2017/08/6dikbp0ps08pa90zudcg_2702.png) (https://hobbicncforum.hu/uploaded_images/2017/08/tn_eiim5j3ffyzd8psw2si6_2702.png) (https://hobbicncforum.hu/uploaded_images/2017/08/eiim5j3ffyzd8psw2si6_2702.png)
(https://hobbicncforum.hu/uploaded_images/2017/08/tn_6dikbp0ps08pa90zudcg_2702.png) (https://hobbicncforum.hu/uploaded_images/2017/08/6dikbp0ps08pa90zudcg_2702.png) (https://hobbicncforum.hu/uploaded_images/2017/08/tn_eiim5j3ffyzd8psw2si6_2702.png) (https://hobbicncforum.hu/uploaded_images/2017/08/eiim5j3ffyzd8psw2si6_2702.png)
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 augusztus 25, 08:45
Írta: 4ybj8h3c8 Dátum 2017 augusztus 25, 08:45
Most TB6600 van rajta, ez úgy tűnik jó lesz. (Jobb mint az előbbiek)
Cím: Re:Léptetőmotor
Írta: nigj66r5m Dátum 2017 augusztus 28, 07:47
Írta: nigj66r5m Dátum 2017 augusztus 28, 07:47
Jó Reggelt!
Nema23h léptetőmotorjaim gyakorlatilag már üresjáratban hamar felmelegednek(kb 20perc). Mi lehet az oka,esetleg a Mach3 szoftverben nincs jól beállítva valami vagy csak fizikai problémája van?
Nema23h léptetőmotorjaim gyakorlatilag már üresjáratban hamar felmelegednek(kb 20perc). Mi lehet az oka,esetleg a Mach3 szoftverben nincs jól beállítva valami vagy csak fizikai problémája van?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 28, 07:53
Írta: 000000000 Dátum 2017 augusztus 28, 07:53
A Mach3 nem tudja, mekkora a léptető motorod árama, így ott azt állítani se lehet. Az áramot a léptetőmotor vezérlődön kell beállítani, erre vagy DIP kapcsolók szolgálnak, vagy egy trimmer potméter. Esetedben vedd vissza ezen elemek átállításával az áramot, és akkor már nem fog annyira melegedni.
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2017 augusztus 28, 08:10
Írta: Motoros Dátum 2017 augusztus 28, 08:10
Esetleg még az is lehet, hogy a motorjaid nem kis ohmikus ellenállású "modern" hibrid motorok, hanem valami régifajta bontott motorok ahol az ohmmérővel mért tekercsellenállás több Ohm...akár 6..7 Ohm.
Ha visszaveszed a vezérlő áramot a legkisebbre és még mindig melegszik akkor az egyik megoldás a motorcsere, mert olyan vezérlő már nem igen létezik ami ezekhez jó lenne.
Ha visszaveszed a vezérlő áramot a legkisebbre és még mindig melegszik akkor az egyik megoldás a motorcsere, mert olyan vezérlő már nem igen létezik ami ezekhez jó lenne.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 29, 13:48
Írta: 000000000 Dátum 2017 augusztus 29, 13:48
Sziasztok!
Szeretném tapasztalt fórtársak véleményét kikérni,
van egy
34HST9805-37B2 tipusú léptető motorom
60v táppal bipoláris bekötéssel
DM860A meghajtóval jelenleg
2.8A curent áram erősséggel,
Mennyi a max áram erősség amit adhatok ennek a motornak illetve befolyásolja e a mikroléptetés nagysága az adható áramerősséget?
(https://hobbicncforum.hu/uploaded_images/2017/08/tn_dc09wn6e0vmxvedx79cyg_5303.jpg) (https://hobbicncforum.hu/uploaded_images/2017/08/dc09wn6e0vmxvedx79cyg_5303.jpg) (https://hobbicncforum.hu/uploaded_images/2017/08/tn_e7eg860ccnq475qnvyue_5303.jpg) (https://hobbicncforum.hu/uploaded_images/2017/08/e7eg860ccnq475qnvyue_5303.jpg)
Szeretném tapasztalt fórtársak véleményét kikérni,
van egy
34HST9805-37B2 tipusú léptető motorom
60v táppal bipoláris bekötéssel
DM860A meghajtóval jelenleg
2.8A curent áram erősséggel,
Mennyi a max áram erősség amit adhatok ennek a motornak illetve befolyásolja e a mikroléptetés nagysága az adható áramerősséget?
(https://hobbicncforum.hu/uploaded_images/2017/08/tn_dc09wn6e0vmxvedx79cyg_5303.jpg) (https://hobbicncforum.hu/uploaded_images/2017/08/dc09wn6e0vmxvedx79cyg_5303.jpg) (https://hobbicncforum.hu/uploaded_images/2017/08/tn_e7eg860ccnq475qnvyue_5303.jpg) (https://hobbicncforum.hu/uploaded_images/2017/08/e7eg860ccnq475qnvyue_5303.jpg)
Cím: Re:Léptetőmotor
Írta: designr Dátum 2017 augusztus 29, 14:25
Írta: designr Dátum 2017 augusztus 29, 14:25
Ha 8 kivezetéses a motorod,te döntöd el hogy a bipolás soros vagy párhuzamos bekötésű legyen..egyik kisebb nyomaték de nagyobb fordulat,másik erősebb de nem szereti a nagy fordulatot.Párhuzamos bekötés szerencsésebb.Indulj alulról..2.8A-t ir..ha nem melegszik a motor és szükséged van rá egy dippel emelhetsz rajta..
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 augusztus 29, 15:14
Írta: svejk Dátum 2017 augusztus 29, 15:14
Már már többször olvastam itt a fórumon ilyeneket, de most csak szóvá teszem.
A biboláris párhuzamos és a bipoláris soros bekötésnek ugyan azt a tartónyomatékot kell tudnia.
A bipoláris párhuzamos valóban nagyobb sebességre lehet képes, de a két bekötés közüli választás inkább meghajtó függő.
Van-e elég tápfeszültség a bipoláros soros meghajtáshoz, vagy nagyobb motoroknál tud-e a meghajtó elég áramot biztosítani a bipoláris párhuzamos kapcsoláshoz.
A biboláris párhuzamos és a bipoláris soros bekötésnek ugyan azt a tartónyomatékot kell tudnia.
A bipoláris párhuzamos valóban nagyobb sebességre lehet képes, de a két bekötés közüli választás inkább meghajtó függő.
Van-e elég tápfeszültség a bipoláros soros meghajtáshoz, vagy nagyobb motoroknál tud-e a meghajtó elég áramot biztosítani a bipoláris párhuzamos kapcsoláshoz.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 29, 15:44
Írta: 000000000 Dátum 2017 augusztus 29, 15:44
Párhuzamos bipolárisan kötöttem be 8 kivezetéses.
A gépem kb 600kg gép és a sebesség növelésével X tengelyem 3500 -as előtolás felet kezd lépést veszteni míg a többi tengely stabil ennél a sebességnél, egy dippel nagyobb áram nem tudom hogy mennyire terheli a motort?
2,8A helyett 3.5A kicsit soknak érződik bár a motorok tartós nyüstölésnél kb 40-45 fokig melegszenek
Ti fa relief marássnál milyen sebességekkel dolgoztok esetleg van valami szakmai fogásotok a megmunkálási idő csökkentéséhez?
A gépem kb 600kg gép és a sebesség növelésével X tengelyem 3500 -as előtolás felet kezd lépést veszteni míg a többi tengely stabil ennél a sebességnél, egy dippel nagyobb áram nem tudom hogy mennyire terheli a motort?
2,8A helyett 3.5A kicsit soknak érződik bár a motorok tartós nyüstölésnél kb 40-45 fokig melegszenek
Ti fa relief marássnál milyen sebességekkel dolgoztok esetleg van valami szakmai fogásotok a megmunkálási idő csökkentéséhez?
Cím: Re:Léptetőmotor
Írta: designr Dátum 2017 augusztus 29, 15:54
Írta: designr Dátum 2017 augusztus 29, 15:54
Igen minden igy van és ez nem nem cáfolja az én beirásomat.
Legtöbb motorhoz megtalálható a nyomaték görbe mindkét fajta bekötéshez.Az emlitett vezérlő a DM860 simán ellátja a párhuzamos bekötést.A hiányzó infó inkább hogy az adott helyzetben nagy tömegű gép lassú előtolás vagy gyors mozgás szükséges..és ugye itt a az áttételezésről sem tudunk..
Mivel a két bekötés és az áram pár perc alatt változtatható,nyugodtan lehet próbálgatni.kellő odafigyeléssel a nagyobb áramra állitott vezérlő tesztelhető..ha melegszik még nem gond..tüzforró ne legyen..
Legtöbb motorhoz megtalálható a nyomaték görbe mindkét fajta bekötéshez.Az emlitett vezérlő a DM860 simán ellátja a párhuzamos bekötést.A hiányzó infó inkább hogy az adott helyzetben nagy tömegű gép lassú előtolás vagy gyors mozgás szükséges..és ugye itt a az áttételezésről sem tudunk..
Mivel a két bekötés és az áram pár perc alatt változtatható,nyugodtan lehet próbálgatni.kellő odafigyeléssel a nagyobb áramra állitott vezérlő tesztelhető..ha melegszik még nem gond..tüzforró ne legyen..
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 29, 17:25
Írta: 000000000 Dátum 2017 augusztus 29, 17:25
A motorod elég rossz adatokkal (pl. 6.4 V, 15 mH) rendelkezik, így nem csoda, ha 3500-as sebességig tudod használni.
Ettől sokkal jobb motorok vannak dinamikailag ebben a kategóriában, pl. a Klavió kft-nél is vehetsz.
Sajnos vasba öntött a motorod rossz dinamikai képessége, és ezen már nem segít semmi, hiszen a motor a "főnök" a CNC-ben a szerényebb vagy komolyabb képességeivel megszabja a lehetőségeket.
Ha érdekel a konkrét pozíció jelleggörbéje, dinamikája, akkor bemérem Neked a Robsy motor dinamikai mérőrendszeremmel.
Az előtolás sok tényezős CNC technológiai adat, maró fordulatszám, maró anyagösszetétele, munkadarab anyaga, maró típusa, fogszáma, fogásmélység, stb. határozzák meg. Ezekből sok mindent nem tudunk, így lehetetlen számszerű adatot mondani segítségképpen.
Ettől sokkal jobb motorok vannak dinamikailag ebben a kategóriában, pl. a Klavió kft-nél is vehetsz.
Sajnos vasba öntött a motorod rossz dinamikai képessége, és ezen már nem segít semmi, hiszen a motor a "főnök" a CNC-ben a szerényebb vagy komolyabb képességeivel megszabja a lehetőségeket.
Ha érdekel a konkrét pozíció jelleggörbéje, dinamikája, akkor bemérem Neked a Robsy motor dinamikai mérőrendszeremmel.
Az előtolás sok tényezős CNC technológiai adat, maró fordulatszám, maró anyagösszetétele, munkadarab anyaga, maró típusa, fogszáma, fogásmélység, stb. határozzák meg. Ezekből sok mindent nem tudunk, így lehetetlen számszerű adatot mondani segítségképpen.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 29, 19:28
Írta: 000000000 Dátum 2017 augusztus 29, 19:28
Értem, vagyis annyira nem az elektronikában nem vagyok túlzottan elmélyülve.
Mivel jellemezhető egy léptető motor jósága? vagy is milyen lenne a legideálisabb az esetemben?
A gépészeti részével és a forgácsolással nagyjából tisztában vagyok, a korlátozó tényező esetemben, ugy gondolom , hogy a tömeg tehetetlenségből adódik és korlátozza le a sebességet a beállításokból többet nem hiszem, hogy kilehet hozni, a motor jelleggörbéje adott.
Egy jó szervó hajtást nehéz pótolni.
Ez a dinamikai bemérés pontosan mit takar?
Mivel jellemezhető egy léptető motor jósága? vagy is milyen lenne a legideálisabb az esetemben?
A gépészeti részével és a forgácsolással nagyjából tisztában vagyok, a korlátozó tényező esetemben, ugy gondolom , hogy a tömeg tehetetlenségből adódik és korlátozza le a sebességet a beállításokból többet nem hiszem, hogy kilehet hozni, a motor jelleggörbéje adott.
Egy jó szervó hajtást nehéz pótolni.
Ez a dinamikai bemérés pontosan mit takar?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 29, 19:49
Írta: 000000000 Dátum 2017 augusztus 29, 19:49
jól gondolom, hogy ez a bemérés a start stop határgörbét illetve üzemi tartományt segíti meghatározni?
Igen ezt csak gyakorlati próbálgatással tudom az ideálishoz közelíteni viszont ez tartalmazza az egész hajtáslánc jellemzőit, rezonancia csodákra képes az ideális beállításokra jókora biztonsági tényezőt kell számolnom.
Igen ezt csak gyakorlati próbálgatással tudom az ideálishoz közelíteni viszont ez tartalmazza az egész hajtáslánc jellemzőit, rezonancia csodákra képes az ideális beállításokra jókora biztonsági tényezőt kell számolnom.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 30, 08:11
Írta: 000000000 Dátum 2017 augusztus 30, 08:11
"Mivel jellemezhető egy léptető motor jósága? vagy is milyen lenne a legideálisabb az esetemben?"
A motort valamilyen vezérlő sok fajta beállítási lehetőség mellett működteti. Így sajnos az is lehet, hogy egy jó motort valaki a rossz minőségű, vagy helytelen konfigurálással hajt, így a végeredmény rossz lehet.
A motor "jósága pedig abban áll, hogy pl. a 0-4 1/s fordulatszám tartományban elvégezzük azt a mérést, amikor a kiadott step jelekre a valós pozícióját megállapítjuk.
Ideális esetben a motor a stepjel kiadásakor már "ugrik" is, és nincs lemaradása vagy túllendülése. Nyilván ilyen motor nincs a valóságban, ezért arra kell törekedni, hogy viszont minél inkább szinkronban legyen a motortengely szögelfordulása a step jelekkel. Az a hajtásrendszer a jobb, ami mindig csak minimálisan hibázik (kicsi az eltérés), és kis időállandóval követi az alapjelet.
A bemérés pedig azt jelenti, hogy egy X típusú step-dir hajtást (stepmotoros, DC vagy AC szervo) Y típusú motorral Z peremfeltételéek mellett az előbbiek alapján egy speciális Robsy motordinamikai mérőprogrammal egységugrás vizsgálójelek felhasználásával működtetünk, és a valós motor szögelfordulási adatokat a kiadott step jelek függvényében ábrázoljuk. A mérési eredmények egy adatbázisba kerülnek, így a későbbiek során összevethető több fajta vezérlő vagy motor műszaki, dinamikai jósága, minősége. Így akár az is kiderülhet, hogy egy jobb léptetőmotoros hajtás legyőzi a gyengébb szervót.
Ha pedig ezeket tudod egy adott hajtásról, akkor a "hazudós" vezérlő csicsa ablakait többé már nem fogod elhinni, és helyén kezeled a virtuális monitor által súlykoltakat, és a valóságot. Lehetőleg elkerülöd azokat a gyenge hajtástartományokat, ahol a legrosszabbak a mért eredmények, így sokkal inkább megbízható, lépés és rezonanciamentes, jobb minőségű lesz a CNC hajtásod, ezáltal az azzal elvégzett technológia minősége is javul.
A motort valamilyen vezérlő sok fajta beállítási lehetőség mellett működteti. Így sajnos az is lehet, hogy egy jó motort valaki a rossz minőségű, vagy helytelen konfigurálással hajt, így a végeredmény rossz lehet.
A motor "jósága pedig abban áll, hogy pl. a 0-4 1/s fordulatszám tartományban elvégezzük azt a mérést, amikor a kiadott step jelekre a valós pozícióját megállapítjuk.
Ideális esetben a motor a stepjel kiadásakor már "ugrik" is, és nincs lemaradása vagy túllendülése. Nyilván ilyen motor nincs a valóságban, ezért arra kell törekedni, hogy viszont minél inkább szinkronban legyen a motortengely szögelfordulása a step jelekkel. Az a hajtásrendszer a jobb, ami mindig csak minimálisan hibázik (kicsi az eltérés), és kis időállandóval követi az alapjelet.
A bemérés pedig azt jelenti, hogy egy X típusú step-dir hajtást (stepmotoros, DC vagy AC szervo) Y típusú motorral Z peremfeltételéek mellett az előbbiek alapján egy speciális Robsy motordinamikai mérőprogrammal egységugrás vizsgálójelek felhasználásával működtetünk, és a valós motor szögelfordulási adatokat a kiadott step jelek függvényében ábrázoljuk. A mérési eredmények egy adatbázisba kerülnek, így a későbbiek során összevethető több fajta vezérlő vagy motor műszaki, dinamikai jósága, minősége. Így akár az is kiderülhet, hogy egy jobb léptetőmotoros hajtás legyőzi a gyengébb szervót.
Ha pedig ezeket tudod egy adott hajtásról, akkor a "hazudós" vezérlő csicsa ablakait többé már nem fogod elhinni, és helyén kezeled a virtuális monitor által súlykoltakat, és a valóságot. Lehetőleg elkerülöd azokat a gyenge hajtástartományokat, ahol a legrosszabbak a mért eredmények, így sokkal inkább megbízható, lépés és rezonanciamentes, jobb minőségű lesz a CNC hajtásod, ezáltal az azzal elvégzett technológia minősége is javul.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 30, 09:24
Írta: 000000000 Dátum 2017 augusztus 30, 09:24
Kapiskálom, hasznos dolognak tünik ha egy adott rendszerhez keressük a legjobb összeállítást, de sajnos hobby szinten az anyagiak nem engedik meg hogy szabadon valaszam a legjobb technikai paraméterekkel rendelkező hardvert.
Persze a kalibrálni a rendszert így is sok információt tudna nyújtani bár nehez univerzális munkapontot beállítani pl óriási a fém és fa közötti paraméterek közti igények.
Persze a kalibrálni a rendszert így is sok információt tudna nyújtani bár nehez univerzális munkapontot beállítani pl óriási a fém és fa közötti paraméterek közti igények.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 augusztus 30, 10:52
Írta: svejk Dátum 2017 augusztus 30, 10:52
Általában elmondható, hogy addig növelheted az áramot amíg normál, folyamatos használat mellet sem emelkedik a motor hőmérséklete olyan 80 C fok fölé.
Ezt a hőfokot egy átlag ember tenyere alig 1 másodpercig viseli el.
(vannak márkás specko motorok amik akár 110 fokon is üzemelhetnek)
Az e fölötti áram már valószínűleg csak ront a helyzeten, mert telítődik a vasmag, amit hallani fogsz a motor hangján is.
A mikrolépés nagysága nem befolyásolja különösebben az áramot.
Ezt a hőfokot egy átlag ember tenyere alig 1 másodpercig viseli el.
(vannak márkás specko motorok amik akár 110 fokon is üzemelhetnek)
Az e fölötti áram már valószínűleg csak ront a helyzeten, mert telítődik a vasmag, amit hallani fogsz a motor hangján is.
A mikrolépés nagysága nem befolyásolja különösebben az áramot.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 augusztus 30, 11:00
Írta: svejk Dátum 2017 augusztus 30, 11:00
A lépésvesztés a fordulatszám és a gyorsulás függvénye.
Ha szép lassan pörgeted fel a motorrral a hajtásodat akkor meglepően nagy sebességeket lehet elérni, de ez általában használahatatlan.
Tanítóink szerint a megmunkálógépek mellékhajtásait gyorsulásra optimalizálják, tehát nem tehetsz mást -ha a motor, elektronika és a mechanika adott-, mint, hogy addig variálod az áttételt az orsó és motor közt amíg el nem éred a maximális gyorsulást.
Ehhez nem feltétlen kell különösebb műszer, akár a Mach3-al is tesztelheted a motortuning bállításait állítgatva.
Nem utolsó sorban a valóságban is ezzel a szoftverrel fog menni a gép.
Nagy vonalakban ki is lehet számolni, hogy kb. mekkora áttétel lesz az ideális, ebben is tud neked segíteni Robsy ha beírod a hajtáslánc pontos adatait.
Ha szép lassan pörgeted fel a motorrral a hajtásodat akkor meglepően nagy sebességeket lehet elérni, de ez általában használahatatlan.
Tanítóink szerint a megmunkálógépek mellékhajtásait gyorsulásra optimalizálják, tehát nem tehetsz mást -ha a motor, elektronika és a mechanika adott-, mint, hogy addig variálod az áttételt az orsó és motor közt amíg el nem éred a maximális gyorsulást.
Ehhez nem feltétlen kell különösebb műszer, akár a Mach3-al is tesztelheted a motortuning bállításait állítgatva.
Nem utolsó sorban a valóságban is ezzel a szoftverrel fog menni a gép.
Nagy vonalakban ki is lehet számolni, hogy kb. mekkora áttétel lesz az ideális, ebben is tud neked segíteni Robsy ha beírod a hajtáslánc pontos adatait.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 augusztus 30, 11:04
Írta: svejk Dátum 2017 augusztus 30, 11:04
Ha viszont az optimális gyorsuláshoz tartózó áttétellel túl lassú lenne a szánok mozgása - a faiparban, vagy nagy munkaterületű gépeknél gyakran előfordulhat- akkor nincs mese marad a kompromisszum, vagy a zsebbe nyúlás és nagyobb motor vásárlása.
Illetve a hobby gépeknél még elő szokott jönni az a probléma, hogy fizikailag nem bírják a nagy gyorsulást a szedett-vedett mechanikák.
Illetve a hobby gépeknél még elő szokott jönni az a probléma, hogy fizikailag nem bírják a nagy gyorsulást a szedett-vedett mechanikák.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 30, 12:43
Írta: 000000000 Dátum 2017 augusztus 30, 12:43
Köszönöm a válaszokat, tesztelem, hogy egy kis plusz áram mit jelent illetve megéri e tunig a nyüstölést.
De gyanus, be kell érjem a 3000 előtolással ez még stabil és biztonságos zóna.
Ha egy második gépet építenénk sok mindent máshogy terveznénk de szerintem ennek soha nincs vége, mindig van vmi amit lehet jobban vagy máshogy.
Talán egyszer rászánom magam egy szervós 5tengelyes gép építésre egyelőre le köti az időm ez a kis 4tengelyes.
De gyanus, be kell érjem a 3000 előtolással ez még stabil és biztonságos zóna.
Ha egy második gépet építenénk sok mindent máshogy terveznénk de szerintem ennek soha nincs vége, mindig van vmi amit lehet jobban vagy máshogy.
Talán egyszer rászánom magam egy szervós 5tengelyes gép építésre egyelőre le köti az időm ez a kis 4tengelyes.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 30, 14:00
Írta: 000000000 Dátum 2017 augusztus 30, 14:00
"a rezonancia csodákra képes"
Valóban, a léptetőmotoros hajtások rezonaciája egy adott sebességnél nagy bajok forrása lehet. Íme itt egy mérési példa, amikor még a viszonylag jó képességű MSD vezérlő se tud mit kezdeni a kis "vacak" nema 17-es motorral:
(http://www.robsy.hu/te2/robsy-motor-measure79.gif)
Sajnos ha valaki ezzel nem törődik az adott hajtásánál, azaz hogy hol vannak ilyen veszélyes tartományok, akkor ha hobby, ha profi a felhasználó, ebben a sebesség tartományban nagy csodát, nagy minőséget ne várjunk a CNC gépünk kapcsán. Sőt erősen javasolt elkerülni ezeket az előtolás értékeket, hiszen a mérésből az is látható, milyen vacak a motor valós poziciónálása.
Ha ezt nem tudjuk, sejtjük, akkor marad nekünk a vezérlő virtuális "megnyugtató, népámító hazugsága" a pozíció, előtolási sebesség kijelzése kapcsán.
Valóban, a léptetőmotoros hajtások rezonaciája egy adott sebességnél nagy bajok forrása lehet. Íme itt egy mérési példa, amikor még a viszonylag jó képességű MSD vezérlő se tud mit kezdeni a kis "vacak" nema 17-es motorral:
(http://www.robsy.hu/te2/robsy-motor-measure79.gif)
Sajnos ha valaki ezzel nem törődik az adott hajtásánál, azaz hogy hol vannak ilyen veszélyes tartományok, akkor ha hobby, ha profi a felhasználó, ebben a sebesség tartományban nagy csodát, nagy minőséget ne várjunk a CNC gépünk kapcsán. Sőt erősen javasolt elkerülni ezeket az előtolás értékeket, hiszen a mérésből az is látható, milyen vacak a motor valós poziciónálása.
Ha ezt nem tudjuk, sejtjük, akkor marad nekünk a vezérlő virtuális "megnyugtató, népámító hazugsága" a pozíció, előtolási sebesség kijelzése kapcsán.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 30, 14:27
Írta: 000000000 Dátum 2017 augusztus 30, 14:27
Mintha erre utaltam volna már, hogy nem a léptetőmotor és a vezérlő fogja ezt megoldani.
Mivel az összes ma kapható léptetőmotor alap tulajdonsága a rezonancia !
Ameddig a mágneses tér ezen a módon oldja meg a léptetést a rezonancia elkerülhetetlen !
Az a motor ami némileg segítene az a mai állás szerint még ipari szinten is drága és egyre jobban feledésbe merülőben van.
A szakmai alázat és egyéb becsmérlő szavakat kéretik mellőzni !
Mivel az összes ma kapható léptetőmotor alap tulajdonsága a rezonancia !
Ameddig a mágneses tér ezen a módon oldja meg a léptetést a rezonancia elkerülhetetlen !
Az a motor ami némileg segítene az a mai állás szerint még ipari szinten is drága és egyre jobban feledésbe merülőben van.
A szakmai alázat és egyéb becsmérlő szavakat kéretik mellőzni !
Cím: Re:Léptetőmotor
Írta: istvan58 Dátum 2017 augusztus 30, 15:13
Írta: istvan58 Dátum 2017 augusztus 30, 15:13
Sziasztok,
ha már megint léptetőről van szó egy kis saját tapasztalat:
A gépemen léptetők vannak AM882 vezérlővel. Szerintem ezek a legjobbak közé tartoznak. Tényleg szépen mennek, lépésvesztést is figyelik, egy bizonyos fordulat fellet.
Van benne egy olyan funkció hogy a rezonancia frekiken ki lehet kompenzálni a rezonanciát. Nos ez nagyon szépen megy, szinte teljesen rezonancia mentes lesz bármilyen fordulaton. Na de ha irányt váltok akkor rosszabb helyzett mint hangolás nélkül. Tehát ez nem megoldás. Egy irányba hangolva a másikba romlik a helyzett. Igy ezt a funkciót nem használom.
ha már megint léptetőről van szó egy kis saját tapasztalat:
A gépemen léptetők vannak AM882 vezérlővel. Szerintem ezek a legjobbak közé tartoznak. Tényleg szépen mennek, lépésvesztést is figyelik, egy bizonyos fordulat fellet.
Van benne egy olyan funkció hogy a rezonancia frekiken ki lehet kompenzálni a rezonanciát. Nos ez nagyon szépen megy, szinte teljesen rezonancia mentes lesz bármilyen fordulaton. Na de ha irányt váltok akkor rosszabb helyzett mint hangolás nélkül. Tehát ez nem megoldás. Egy irányba hangolva a másikba romlik a helyzett. Igy ezt a funkciót nem használom.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 augusztus 30, 15:31
Írta: svejk Dátum 2017 augusztus 30, 15:31
Csak kíváncsiskodom.
Leírnád a kérdéses szán körülbelüli tömegét, az orsó hosszát, átmérőjét, emelkedését és ha van a szíjkerekek adatait?
Leírnád a kérdéses szán körülbelüli tömegét, az orsó hosszát, átmérőjét, emelkedését és ha van a szíjkerekek adatait?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 30, 15:42
Írta: 000000000 Dátum 2017 augusztus 30, 15:42
"Mintha erre utaltam volna már, hogy nem a léptetőmotor és a vezérlő fogja ezt megoldani"
1. Kár sokszor ugyanazat a téves állításodat szajkózni, ugyanis a kevesebb vagy semmi hozzászólás egy témához, az több, ha lövésed sincs a valóságról, a műszaki tényekről.
2. A beírásom EGY ADOTT hajtás konfiguráció esetén a rezonacia jelenségét mutatja be konkrét bemérési adatok mentén.
3. Ha a bejegyzésemnek tárgya lett volna más meghajtóval elvégzett mérési eredemények összevetése, azok is világosan és egyértelmnűen kimutatják, hogy bizony X vezérlő sokkal jobban megoldja a rezonacia problémát ugyanezen motornál, Y kevésbé. Annál is inkább mert manapság már léteznek olyan korszerű pl. DSP alapú microstep algortitmusok, megoldások, amik a rezonancia kezelésben is sokkal többet tudnak, mint egy hagyományos vezérlő. A decay lekezelési módok, lehetőségek, belső PWM órajelek, FET Rdson-ok sem szoktak azonosak lenni, így könnyen belátható, hogy az idézett mondatodnak semmi szakmai alapja nem volt.
1. Kár sokszor ugyanazat a téves állításodat szajkózni, ugyanis a kevesebb vagy semmi hozzászólás egy témához, az több, ha lövésed sincs a valóságról, a műszaki tényekről.
2. A beírásom EGY ADOTT hajtás konfiguráció esetén a rezonacia jelenségét mutatja be konkrét bemérési adatok mentén.
3. Ha a bejegyzésemnek tárgya lett volna más meghajtóval elvégzett mérési eredemények összevetése, azok is világosan és egyértelmnűen kimutatják, hogy bizony X vezérlő sokkal jobban megoldja a rezonacia problémát ugyanezen motornál, Y kevésbé. Annál is inkább mert manapság már léteznek olyan korszerű pl. DSP alapú microstep algortitmusok, megoldások, amik a rezonancia kezelésben is sokkal többet tudnak, mint egy hagyományos vezérlő. A decay lekezelési módok, lehetőségek, belső PWM órajelek, FET Rdson-ok sem szoktak azonosak lenni, így könnyen belátható, hogy az idézett mondatodnak semmi szakmai alapja nem volt.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 30, 15:46
Írta: 000000000 Dátum 2017 augusztus 30, 15:46
Lehet trükközni, ahogy a leadshine AM-es vezérlők is teszik, de tökéletes sosem lesz.
Sajnos visszacsatolás nélkül ezt lehet kihozni.
Sajnos visszacsatolás nélkül ezt lehet kihozni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 30, 15:56
Írta: 000000000 Dátum 2017 augusztus 30, 15:56
Amivel most kísérletezgetsz azt már rég el is felejtettem !
A nagy csodás mérőpadhoz elég egy tachogenerátor és egy oszcilloszkóp.
Csak nem mindenki veri itt a mellét, hogy így meg úgy a mitudoménmilyen névtelem mérőrendszer.
Tehát hátrébb az agyarakkal ami a szakmai tapasztalatot illeti !
A nagy csodás mérőpadhoz elég egy tachogenerátor és egy oszcilloszkóp.
Csak nem mindenki veri itt a mellét, hogy így meg úgy a mitudoménmilyen névtelem mérőrendszer.
Tehát hátrébb az agyarakkal ami a szakmai tapasztalatot illeti !
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 augusztus 30, 16:07
Írta: svejk Dátum 2017 augusztus 30, 16:07
Csak szintén kíváncsiságból.
Mi az oka, hogy mostanában ennyire belemélyedtél a léptetőmotorok lelki világába?
Hiszen már vagy nyolc éve AC szervo motorokat forgattál saját elektronikával.
A 300 1/min körüli rezonanciát mindenki megtapasztalja, a microstep is csak gyengíti a jelenséget de nem szünteti meg.
Valami visszacsatolt rendszert kreáltál?
Esetleg a vezérlőddel ténylegesen ki akarod/tudod zárni a rezonáns pontokat?
Mert, hogy valamire ki akarsz lyukadni az hót' ziher, nagyon tolod elénk a grafikonokat. :)
Mi az oka, hogy mostanában ennyire belemélyedtél a léptetőmotorok lelki világába?
Hiszen már vagy nyolc éve AC szervo motorokat forgattál saját elektronikával.
A 300 1/min körüli rezonanciát mindenki megtapasztalja, a microstep is csak gyengíti a jelenséget de nem szünteti meg.
Valami visszacsatolt rendszert kreáltál?
Esetleg a vezérlőddel ténylegesen ki akarod/tudod zárni a rezonáns pontokat?
Mert, hogy valamire ki akarsz lyukadni az hót' ziher, nagyon tolod elénk a grafikonokat. :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 30, 16:34
Írta: 000000000 Dátum 2017 augusztus 30, 16:34
A tömege kb 120kg orsó 22mm/05 hasznos hosz 1200mm áttétel 0.6:1
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 augusztus 30, 16:49
Írta: svejk Dátum 2017 augusztus 30, 16:49
Gyorsító áttétel?
A tárcsák anyaga, szélessége, átmérője?
A tárcsák anyaga, szélessége, átmérője?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 30, 17:12
Írta: 000000000 Dátum 2017 augusztus 30, 17:12
"A nagy csodás mérőpadhoz elég egy tachogenerátor és egy oszcilloszkóp."
[#nyes][#nevetes1]
1. A tacho generátor váltakozó feszt ad ki, így eleve nem jöhet szóba ilyen mérésre.
2. A tachó sebesség mérő eszköz, ha nem vetted volna észre a mérések a pozícióról szólnak. Hol látsz te a szkópon pozíciót?
3. Hol van a hiteles step/dir vizsgáló alapjel egy szkóp meg tachó esetén?
Most őszintén, jó az neked, ha ennyire égeted magad? Hiszen arról tettél ismét tanubizonyságot, hogy a sebesség és út és vizgálójel fogalmát se ismered, és szakmaiság helyett csak kötekedő, topikromboló írási, és böfögési kényszered van, ha meglátod a Robsy nevet.
[#nyes][#nevetes1]
1. A tacho generátor váltakozó feszt ad ki, így eleve nem jöhet szóba ilyen mérésre.
2. A tachó sebesség mérő eszköz, ha nem vetted volna észre a mérések a pozícióról szólnak. Hol látsz te a szkópon pozíciót?
3. Hol van a hiteles step/dir vizsgáló alapjel egy szkóp meg tachó esetén?
Most őszintén, jó az neked, ha ennyire égeted magad? Hiszen arról tettél ismét tanubizonyságot, hogy a sebesség és út és vizgálójel fogalmát se ismered, és szakmaiság helyett csak kötekedő, topikromboló írási, és böfögési kényszered van, ha meglátod a Robsy nevet.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 30, 17:27
Írta: 000000000 Dátum 2017 augusztus 30, 17:27
Bizonyára elkerülte a figyelmedet, hogy ez a rendszer nem csak a léptető motor, hanem bármilyen step/dir szervo bemérésére is alkalmas, és gondoltam összemérek pár szervót akár egy step motorossal is, mi is a helyzet. Nagy legendák dőltek meg, annyit elárulhatok.
Az aktualitását pedig az adja, hogy bizonyos kőkemény teszt ábráimat nem tudtam szépen lézerrel gravírozni, és a jelenségeket meg kellett "kutatni" ilyen mószerekkel is, miért nem ott vannak a lézerpöttyök, ahol kellene lenniük.
Aztán arra is gondoltam, talán ez a téma megér egy misét ezen a Fórumon is, és képvisel akkora tanulságot, mint pl. egy részeg sofőrös videó link.
Pár magánlevélben is kértek arra, írjak már ezen dolgokról, amit tudok, mert őket is érdekeli a működés mélyebb tartalma, és nekik is volt olyan olyan lépésvesztési, poziconálási problémájuk, amire ezek a mérési adatok magyarázatot adhatnak.
Az aktualitását pedig az adja, hogy bizonyos kőkemény teszt ábráimat nem tudtam szépen lézerrel gravírozni, és a jelenségeket meg kellett "kutatni" ilyen mószerekkel is, miért nem ott vannak a lézerpöttyök, ahol kellene lenniük.
Aztán arra is gondoltam, talán ez a téma megér egy misét ezen a Fórumon is, és képvisel akkora tanulságot, mint pl. egy részeg sofőrös videó link.
Pár magánlevélben is kértek arra, írjak már ezen dolgokról, amit tudok, mert őket is érdekeli a működés mélyebb tartalma, és nekik is volt olyan olyan lépésvesztési, poziconálási problémájuk, amire ezek a mérési adatok magyarázatot adhatnak.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 30, 17:30
Írta: 000000000 Dátum 2017 augusztus 30, 17:30
Igen gyorsító, 60mm 37.5mm alu-ból 18mm széles
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 augusztus 30, 18:16
Írta: svejk Dátum 2017 augusztus 30, 18:16
Köszönöm a választ.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 augusztus 30, 18:24
Írta: svejk Dátum 2017 augusztus 30, 18:24
Az előző és a fenti adatokkal, gyorsító áttétel nem nagyon tetszik nekem ez elsőre.
Főleg nem, hogy az 1,7 kgcm2 inerciájú motor tengelyére rögtön felpakoltál egy 0.6 kgcm2-es kereket.
Valószínű nálad a nagyobb emelkedésű orsóra váltás hozná meg a jobb eredményt.
De ennek jól utána kellene számolni.
Főleg nem, hogy az 1,7 kgcm2 inerciájú motor tengelyére rögtön felpakoltál egy 0.6 kgcm2-es kereket.
Valószínű nálad a nagyobb emelkedésű orsóra váltás hozná meg a jobb eredményt.
De ennek jól utána kellene számolni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 30, 19:43
Írta: 000000000 Dátum 2017 augusztus 30, 19:43
Csak, hogy újra beleverjem a csúfot a mérnöki tudásodba ! [#hehe]
Figyeld a videót az 5. másodperctől !
Mi is van ott ?
Figyeld a videót az 5. másodperctől !
Mi is van ott ?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 30, 20:50
Írta: 000000000 Dátum 2017 augusztus 30, 20:50
Mikor kezdtem tervezgetni nagyobb nyomatékú motort szerettem volna de költségek közbeszóltak.
Biztos van benne valami amit mondsz, hogy az inerciaviszony jól meg választása hajtás rendszer alapja.
Persze végig nem érő számítgatásokba is bele lehet menni de mindent figyelembe venni ugysem lehet.
Nem beszélve a kínai cuccok megadott paraméterei néha igen csak kérdésesek.
Én már elégedett lennénk egy olyan rendszerrel aminek a terhelés tehetetlenségi nyomatéka nem nagyobb a motor tehetetlenségi nyomatékának 5-6x sával de mindennek árra van szó szerint.
Biztos van benne valami amit mondsz, hogy az inerciaviszony jól meg választása hajtás rendszer alapja.
Persze végig nem érő számítgatásokba is bele lehet menni de mindent figyelembe venni ugysem lehet.
Nem beszélve a kínai cuccok megadott paraméterei néha igen csak kérdésesek.
Én már elégedett lennénk egy olyan rendszerrel aminek a terhelés tehetetlenségi nyomatéka nem nagyobb a motor tehetetlenségi nyomatékának 5-6x sával de mindennek árra van szó szerint.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 30, 20:54
Írta: 000000000 Dátum 2017 augusztus 30, 20:54
"Mi is van ott ?"
Két betűcske, "DC" van ott, amit te elhagytál, én meg PONT ERRE hívtam fel figyelmet. Az ilyen eszközt magyarul dinamónak hívják és nem generátornak.
Aztán hiába linkleled sokadszor ezt a videót, az a rossz hírem van továbbra is, azon az oszcilloszkópon a tachodinamóból származóan NEM pozíció jelek láthatók, hanem sebesség jelek.
Hát így jártál, tovább égeted magad egy olyan videóval, aminek semmi köze a Robsy motordinamikai a mérőrendszerhez, és az 5304 bejegyzésem mérési eredményéhez.
Vedd már észre:
1. A kevesebb néha több, nem kell neked mindenhez nem saját tudással, hanem google keresővel reagálni.
2. Motor hajtás témakörben nagyon nem vagy velem egy súlycsoportban műszaki tudásodat illetően, ezért hanyagoljál az ostoba hozzászólásiddal.
3. Ha az első két pont nem érthető, égessed magad tovább itt a fórumon a topikromboló viselkedésed kapcsán, nekem aztán nyolc, engem nem idegesítesz vele, hiszen imserünk már itt sokan.
Két betűcske, "DC" van ott, amit te elhagytál, én meg PONT ERRE hívtam fel figyelmet. Az ilyen eszközt magyarul dinamónak hívják és nem generátornak.
Aztán hiába linkleled sokadszor ezt a videót, az a rossz hírem van továbbra is, azon az oszcilloszkópon a tachodinamóból származóan NEM pozíció jelek láthatók, hanem sebesség jelek.
Hát így jártál, tovább égeted magad egy olyan videóval, aminek semmi köze a Robsy motordinamikai a mérőrendszerhez, és az 5304 bejegyzésem mérési eredményéhez.
Vedd már észre:
1. A kevesebb néha több, nem kell neked mindenhez nem saját tudással, hanem google keresővel reagálni.
2. Motor hajtás témakörben nagyon nem vagy velem egy súlycsoportban műszaki tudásodat illetően, ezért hanyagoljál az ostoba hozzászólásiddal.
3. Ha az első két pont nem érthető, égessed magad tovább itt a fórumon a topikromboló viselkedésed kapcsán, nekem aztán nyolc, engem nem idegesítesz vele, hiszen imserünk már itt sokan.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 30, 21:05
Írta: 000000000 Dátum 2017 augusztus 30, 21:05
És kit érdekel a pozíciójel mikor rezonanciáról volt szó ?
Ha nincs rezonancia nincs számottevő lépéskésés sem !
A kevesebb néha több, minek csináljam meg újra mikor van róla profi videó is ?
Tehát te égsz itt mint a Reichstag !
Ha nincs rezonancia nincs számottevő lépéskésés sem !
A kevesebb néha több, minek csináljam meg újra mikor van róla profi videó is ?
Tehát te égsz itt mint a Reichstag !
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 30, 21:09
Írta: 000000000 Dátum 2017 augusztus 30, 21:09
A tachogenerátor szinte minden szervómotoron DC annak ellenére, hogy hibásan generátornak van mindenhol írva.
Ez is csak kicsinyes "mérnöki" kötekedés !
Ez is csak kicsinyes "mérnöki" kötekedés !
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 30, 21:16
Írta: 000000000 Dátum 2017 augusztus 30, 21:16
Van egy nagyon ütős összefüggésa hajtásméretezésben, lehet tudod is, volt már a Fórumon erről szó. Nevezetesen egy forgó tengely vagy tárcsa tehetetlenségi nyomatéka az átmérő NEGYEDIK hatványával növekszik. Minden tized milliméter számíthat, ami felelsleges az áttételeken, és a golyósorsón, a megyedik hatvány letarolja álmainkat, és kemény realitásra készerít. Ezt szemléltetik a hajtásméretező progim alábbi sorozat jellegörbéi, ahol csak annyi történt, hogy 2 miliméterenként növelvea golyósorsó átmérőjét szemléltetésre került a negyedik hatvány hatása. Jól látszik, hogyan veszíti el a dinamikai képességét a hajtás.
(http://cnctar.hobbycnc.hu/Tibor45/1-Robsy-drivertest.jpg)
(http://cnctar.hobbycnc.hu/Tibor45/1-Robsy-drivertest.jpg)
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2017 augusztus 30, 22:46
Írta: zozo Dátum 2017 augusztus 30, 22:46
...és hogyan változik a hajtás rezonanciája, ha a Nema 17-es motor terhelten fut, mondjuk egy fogazott szíjas hajtással, ami eleve rezgéscsillapító hatású.
Mértél így is, vagy csak szabadon futó motort teszteltél?
Érdekelne, hogy a helyén miként viselkedik egy hajtáslánc, nem csak a motor saját inerciájára hagyatkozva a tesztek során.
Mértél így is, vagy csak szabadon futó motort teszteltél?
Érdekelne, hogy a helyén miként viselkedik egy hajtáslánc, nem csak a motor saját inerciájára hagyatkozva a tesztek során.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2017 augusztus 31, 06:25
Írta: ANTAL GÁBOR Dátum 2017 augusztus 31, 06:25
Sokkal többre mennénk ezekkel a görbékkel ha az ordináta értékekkel, és dimenziókkal lenne megadva .Az abszcisszán vannak ugyan számok de mik azok arra csak tippelni lehet ( de a dimenzió hiányában az sem ér semmit ) Az már hab lenne a tortán ha a görbék paraméterei is jelezve lennének .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 06:47
Írta: 000000000 Dátum 2017 augusztus 31, 06:47
Azt hiszem rátapintottál a lényegre, mert ilyen ábrákkal bárki teleszórhatja a fórumot, de haszna max annyi mint vödörbe ordibálni. [#nevetes1]
Majd figyeld ki, a szakmai alázat és egyéb lejárató kampányt amit ide lesz biggyesztve ezért ! [#papakacsint]
Majd figyeld ki, a szakmai alázat és egyéb lejárató kampányt amit ide lesz biggyesztve ezért ! [#papakacsint]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 07:17
Írta: 000000000 Dátum 2017 augusztus 31, 07:17
Tévedésben vagy, mert ez a beírásom csak az átmérő hatását mutatja be a J-re, ezáltal pedig a hajtás optimális gyorsulási képességére. Így aztán mivel ott vannak a vízsintes gyorsulási szint vonalak, valamint az áttélei arányok is, teljesen tanulságos és érthető a tendencia, az ok-okozati összefüggés.
Megkérnélek, Te is fejezd be azt a stílust, hogy ha meglátod a Robsy nevet, akkor előjön benned a szubjektív előitélet, kötekedés, míg az igazi objektív műszaki érveid erősen háttérbe szorulnak.
Megkérnélek, Te is fejezd be azt a stílust, hogy ha meglátod a Robsy nevet, akkor előjön benned a szubjektív előitélet, kötekedés, míg az igazi objektív műszaki érveid erősen háttérbe szorulnak.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 07:23
Írta: 000000000 Dátum 2017 augusztus 31, 07:23
Te azzal foglalkozzál elsősorban, hogy kezd el megérteni a sebesség és az út fogalmát. Halkan jegyzem meg, ez általános iskolai tananyag. Ha majd eljutsz a megértési folyamat kapcsán valameddig, akkor nem írkálsz olyan orbitális szakmai ostobaságot, hogy "A nagy csodás mérőpadhoz elég egy tachogenerátor és egy oszcilloszkóp."
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2017 augusztus 31, 07:32
Írta: ANTAL GÁBOR Dátum 2017 augusztus 31, 07:32
Ha nem láttam volna már a görbéket korábban akkor a mostaniról (vegyük Vadnyuszit aki most látja elöször ) honnan tudnám hogy a vízszintes tengelyen az alkalmazott áttétel van? Sem a beírásból sem a görbékből az nem derül ki
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 07:42
Írta: 000000000 Dátum 2017 augusztus 31, 07:42
Nyilván hatással van rá, és lehetne a méréseket számos új mérési feltétellel kiegészíteni, ha minden részletre kimenő teszteket akar valaki. Egyelőre így is nagyon sok a változó, a peremfeltétel, és fő vizzsgálati kérdésként ha sajnos az bizonyosodik be, hogy ugyanaz a motor ugyanolyan mérési feltételek mellett X, vagy Y motorvezérlővel teljesen másként viselkedik, és szinte nem is rezonál, akkor a mérés ezen tanulsága máris kézzelfogható.
A szomorú valóság az lesz igazán, hogy ha majd egyszer teszek fel ilyen terheléses mérési eredményeket is, ezek még rosszabb pozíció követést mutatnak a léptető motorok esetében. Hiszen még nulla motor tengely terhelés esetén is egyre inkább kezd lemaradni, elcsúszni a valós és kiadott pozíció, és a végén szétesik a hajtásrendszer, és a lépéstévesztés jelenség sorozat következik be a mérés kapcsán.
A szomorú valóság az lesz igazán, hogy ha majd egyszer teszek fel ilyen terheléses mérési eredményeket is, ezek még rosszabb pozíció követést mutatnak a léptető motorok esetében. Hiszen még nulla motor tengely terhelés esetén is egyre inkább kezd lemaradni, elcsúszni a valós és kiadott pozíció, és a végén szétesik a hajtásrendszer, és a lépéstévesztés jelenség sorozat következik be a mérés kapcsán.
Cím: Re:Léptetőmotor
Írta: remrendes Dátum 2017 augusztus 31, 07:50
Írta: remrendes Dátum 2017 augusztus 31, 07:50
En nem kotekedni akarok, de szerintem Gabor sem akart. Igazabol engem is erdekelne, hogy az atmerok 2, 6 vagy 10mm-rol indulnak, szamomra ez nem derult ki. Azt ertem, hogy gyorsulas-attetel grafikont latunk, de az is erdekes lenne, hogy milyen osztasban. Lehet, hogy a gyorsulas tengely erteki kozott elhanyagolhato kulonbseg van?
Altalaban nem lehetne beled kotni, de sokszor csak fel informacio er el hozzank.
Altalaban nem lehetne beled kotni, de sokszor csak fel informacio er el hozzank.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 07:57
Írta: 000000000 Dátum 2017 augusztus 31, 07:57
Látom te beteg vagy !
Sokszor kértem a gyalázkodó lejárató mondataidat mellőzni !
Szerinted egy több sugaras szkópon meddig tart megjeleníteni a step jeleket is ?
Itt látszik, hogy zéró a szakmai tapasztalatod !!!
És ehhez nem kell rotyszi mérő rendszer se hogy láthatóvá tegye az ember a léptetős rendszer rezonanciáit hibáit !
Sokszor kértem a gyalázkodó lejárató mondataidat mellőzni !
Szerinted egy több sugaras szkópon meddig tart megjeleníteni a step jeleket is ?
Itt látszik, hogy zéró a szakmai tapasztalatod !!!
És ehhez nem kell rotyszi mérő rendszer se hogy láthatóvá tegye az ember a léptetős rendszer rezonanciáit hibáit !
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 08:09
Írta: 000000000 Dátum 2017 augusztus 31, 08:09
A görbékből világosan látszódik a dinamika romlása, amihez pedig közöltem, hogy ez a 2 mm-enkénti golyósorsó átmérő változás eredménye. Mivel az y tengelyen ott van az "a" (gyorsulás) magyarázat, TELJESEN EGYÉRTELMŰ mondandóm lényege, a hatásmechanizmus, függetlenül attól, hogy az x tengely végéről az "i" (áttétel) jelzés a kép kivágás során lemaradt. A dinamika, gyorsulási képesség leromlása, annak tendenciája egyértelmű. Ennyi volt a célom csak.
Az egész gondolati kör pedig úgy jön vadnyuszi gépéhez, hogy ő egy elég nagy átmérőjű golyósorsót, és fogazott szíj tárcsát használ. Majd megírja, hogy tudta-e azt, hogy a negyedik hatvány kapcsán ennek mi a következménye J-re.
Hátha nem ismerte a negyedik hatvány hatást, vagy az új Fórumtagok között bizonyára sokan nem tudták ezt, azaz tanulhatnak belőle. Így a fő célját ezen beírás máris elérte, hiába kötsz bele lényegtelen részlet kérdésekbe.
Az egész gondolati kör pedig úgy jön vadnyuszi gépéhez, hogy ő egy elég nagy átmérőjű golyósorsót, és fogazott szíj tárcsát használ. Majd megírja, hogy tudta-e azt, hogy a negyedik hatvány kapcsán ennek mi a következménye J-re.
Hátha nem ismerte a negyedik hatvány hatást, vagy az új Fórumtagok között bizonyára sokan nem tudták ezt, azaz tanulhatnak belőle. Így a fő célját ezen beírás máris elérte, hiába kötsz bele lényegtelen részlet kérdésekbe.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 08:17
Írta: 000000000 Dátum 2017 augusztus 31, 08:17
Fáj az igazság mi???? Továbbre is arra kérünk, tanuljál elsősorban, és csak műszakilag korrekt állításokat írkáljál egy MŰSZAKI fórumon, vagy ha ez nem megy tűrjed a jogos kritikát vagy lássad be, egy tachóval te a büdös életbe nem tudsz egy szkópon pozíció jeleket megnézni, mint ezt írtad:
"A nagy csodás mérőpadhoz elég egy tachogenerátor és egy oszcilloszkóp."
[#csodalk][#nevetes1]
"A nagy csodás mérőpadhoz elég egy tachogenerátor és egy oszcilloszkóp."
[#csodalk][#nevetes1]
Cím: Re:Léptetőmotor
Írta: Csuhás Dátum 2017 augusztus 31, 08:34
Írta: Csuhás Dátum 2017 augusztus 31, 08:34
Nem kötekedésként, de ha már ennyit beszélünk a görbeseregről, elmondanád mi van a vízszintes tengelyen? ( Csak hogy ne nézzük egy fekete test sugárzási görbe seregének ( intenzitás, hullámhossz, hőmérséklettel paraméterezve :- ))
Cím: Re:Léptetőmotor
Írta: fn47xk7ei Dátum 2017 augusztus 31, 08:37
Írta: fn47xk7ei Dátum 2017 augusztus 31, 08:37
Nekem tetszik , hogy egy mérnök ember így el tud mélyülni egy általa érdekesnek vélt témakörbe . Gyakran elolvasom hozzászólásaid és sokszor csak pislogok - de ez az én problémám . Ezen esetben szerintem sem szükséges minden egyes paramétert megadni mivel csak szemléltetésnek tetted közzé és a lényeg a " 2 miliméterenként növelve a golyósorsó átmérőjét SZEMLÉLTETÉSRE KERÜLT A NEGYEDIK HATVÁNY HATÁSA ! A lényeg látszik - érzékelhető ... ha elfogadja az átlag fórumlakó , hogy nem hasalásról hanem egy valós vagy egy jól szimulált mérésről van szó .[#eljen] De tovább nem okoskodom itt és nem akarok többet hozzászólni inkább maradok egyszerű olvasója a témának .[#worship]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 08:37
Írta: 000000000 Dátum 2017 augusztus 31, 08:37
Nem értelek, leírtam az 5334-ben. Olvasd el megint.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 08:56
Írta: 000000000 Dátum 2017 augusztus 31, 08:56
Kedves vagy, köszönöm.
Igazából a célom évek óta csak annyi, hogy:
1. Érdemes elgondolkodni, megérteni bizonyos műszaki tényeket, mert azok akkor is hatnak ránk, gépünkre ha nem érdekel.
2. A világ analóg, sajnos két digitális stepjel közt is van élet.
3. Legyünk nagyon óvatosak, és mindig legyünk annak tudatában, hogy a step-dir vezérlésű léptető motoros hajtások valós pozíció adatai és az általunk hitt vagy látott vezérlő program ablakok kijelzései között igen nagy eltérések lehetségesek. Leginkább a folyamatos kisebb vagy nagyobb műszaki hazugság, félre tájékoztatás áldozatai vagyunk CNC-zés közben. Ennek felső határértéke pedig a lépésvesztés, leállás, ahonnan kezdve a munkánk is kárbavész.
Igazából a célom évek óta csak annyi, hogy:
1. Érdemes elgondolkodni, megérteni bizonyos műszaki tényeket, mert azok akkor is hatnak ránk, gépünkre ha nem érdekel.
2. A világ analóg, sajnos két digitális stepjel közt is van élet.
3. Legyünk nagyon óvatosak, és mindig legyünk annak tudatában, hogy a step-dir vezérlésű léptető motoros hajtások valós pozíció adatai és az általunk hitt vagy látott vezérlő program ablakok kijelzései között igen nagy eltérések lehetségesek. Leginkább a folyamatos kisebb vagy nagyobb műszaki hazugság, félre tájékoztatás áldozatai vagyunk CNC-zés közben. Ennek felső határértéke pedig a lépésvesztés, leállás, ahonnan kezdve a munkánk is kárbavész.
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2017 augusztus 31, 09:08
Írta: D.Laci Dátum 2017 augusztus 31, 09:08
"léptető motoros hajtások valós pozíció adatai és az általunk hitt vagy látott vezérlő program ablakok kijelzései között igen nagy eltérések lehetségesek. "
A te általad készített vezérlő program a valós léptetőmotor pozíciókat (rezonanciákat, lengéseket) mutatja vagy a vélt step impulzusok alapján fiktív pozíciót?
Gondolom, ha encoder van rászerelve akkor a valós értékeket mutatja és kalkulál vele mint a Linuxcnc (zárthurkú vezérlés).
A te általad készített vezérlő program a valós léptetőmotor pozíciókat (rezonanciákat, lengéseket) mutatja vagy a vélt step impulzusok alapján fiktív pozíciót?
Gondolom, ha encoder van rászerelve akkor a valós értékeket mutatja és kalkulál vele mint a Linuxcnc (zárthurkú vezérlés).
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2017 augusztus 31, 09:44
Írta: zozo Dátum 2017 augusztus 31, 09:44
A hobbista fórumozó az érem másik oldaláról nézi a dolgot.
Azt mondja: -Felőlem rezonálhat kedvére a motor, amíg a három elkészült csapágyfészekbe hibátlanul passzol a csapágy [#nevetes1]
Azt mondja: -Felőlem rezonálhat kedvére a motor, amíg a három elkészült csapágyfészekbe hibátlanul passzol a csapágy [#nevetes1]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 09:56
Írta: 000000000 Dátum 2017 augusztus 31, 09:56
Mivel szerintem nem jó dolog szinte folyamatosan hazudni, fölöslges tizedmikront is odabiggyesztő csicsa dolgokkal traktálni a felhasználót, alapesetben nálam le vannak tiltva a pozíció kijelzések G kód futtatásakor a vezérlő programjaimban, egy színes kis mini grafika viszont mindig mutatja a szerszámpályákat. Ha valakinek mégis az kell, hogy tévedésben tartsák, bekapcsolja, és nézze. A gépkönyvben van arra utalás, hogy ebben az esetben mivel csak vezérlő programról beszélünk ez csak egy alapjel kijelzés, adott esetben semmi köze a valósághoz. Ez könnyen megérthető, ha valaki eljátsza azt a szitut, hogy nincs is aktív hajtása, ahova küldenénk a sted/dir jeleket, mert pl. be sincs kötve, de a buta csicsa vezérlő program akkor is végig hazudja az egész folyamatot az X Y Z idétlen adataival, holott közben végig álló helyzetben volt a motor.
Más kérdés az ha tengelyenkénti pozíció és sebesség visszacsatolás is van a valóságról a program működéséhez, a G kódok futtatásakor, mint az igazi ipari CNC gépeken. Ez egy más kategória, nincsenek ilyen vezérlőim, mivel egy mezei PC tengelyenkénti külön processzor HW támogatás nélkül erre eleve esélytelen.
Más kérdés az ha tengelyenkénti pozíció és sebesség visszacsatolás is van a valóságról a program működéséhez, a G kódok futtatásakor, mint az igazi ipari CNC gépeken. Ez egy más kategória, nincsenek ilyen vezérlőim, mivel egy mezei PC tengelyenkénti külön processzor HW támogatás nélkül erre eleve esélytelen.
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2017 augusztus 31, 09:58
Írta: D.Laci Dátum 2017 augusztus 31, 09:58
Csapágyfészek csak csak elkészül. Mert ott álltalábban golyósorsó+ áttétel is van, az elméleti felbontás viszonylag nagy, de lézergravírozóknál és 3D nyomtatóknál gyakorta találkozni ~40 lépés/mm felbontással, na ott már jelentös az a ~ +-3 mikrostep lengés.
Szerintem.
Szerintem.
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2017 augusztus 31, 10:03
Írta: D.Laci Dátum 2017 augusztus 31, 10:03
Értem!
De akkor a te programodban is bekapcsolható a csicsa, meg más csicsa programban is beállítható a kijelzett érték, ill. ki is kapcsolható. :)
A lényeg pörögjön a motor, repüljön a forgács! :)
De akkor a te programodban is bekapcsolható a csicsa, meg más csicsa programban is beállítható a kijelzett érték, ill. ki is kapcsolható. :)
A lényeg pörögjön a motor, repüljön a forgács! :)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 10:09
Írta: 000000000 Dátum 2017 augusztus 31, 10:09
A rezonacia, és hibátlanság egymást kizáró fogalom.
Könnyű annak, aki csak nagy felbontással éli az életét, és az apró ám valós részletek nem érdeklik, így aztán mindig minden szép és jó. Maradjunk abba, két diszkrét pont között mindig van valamilyen összekötő út, csak mérés és szemlélet kérdése, hogy erről is elgondolkodjunk, és aztán a hibátlanság, működés fogalmát valósan alkalmazhassuk.
Könnyű annak, aki csak nagy felbontással éli az életét, és az apró ám valós részletek nem érdeklik, így aztán mindig minden szép és jó. Maradjunk abba, két diszkrét pont között mindig van valamilyen összekötő út, csak mérés és szemlélet kérdése, hogy erről is elgondolkodjunk, és aztán a hibátlanság, működés fogalmát valósan alkalmazhassuk.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 10:15
Írta: 000000000 Dátum 2017 augusztus 31, 10:15
".. repüljön a forgács!"
Ez nem mindig jó, mert még a végén védőszemüveg nélkül kiveri a Hobbysta szemét a forgács, és aztán már oda a sok (egyébként majdnem fölösleges) ablakocskának a nézegetése is.[#zavart2][#circling]
Ez nem mindig jó, mert még a végén védőszemüveg nélkül kiveri a Hobbysta szemét a forgács, és aztán már oda a sok (egyébként majdnem fölösleges) ablakocskának a nézegetése is.[#zavart2][#circling]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 16:56
Írta: 000000000 Dátum 2017 augusztus 31, 16:56
Ezt egy kamaránál regisztrált mérnök látna amit itt hazugságot összehordasz az visszaadná a képesítését !
Nem az igazság fáj, mert amit eddig írtál abban semi igaz nincs, csak az az agresszív marketing és törtetés, taposás, lejáratás amit itt végzel !
Ha valaki nem polírozza az üleped fényesre az egyből "elmebeteg" vagy "nincs kellő szakmai alázat" stb stb !
Mellesleg:
Próbáltad már mit generál egy tachogenerátor összekötve egy szkóppal ?
Természetesen nem.
Így nekem ne gyere azzal, hogy nem lehet poziciót nézni !
A túlövések tökéletesen mutatják amikor eléri a pozíciót és ha alá beteszem a lépésjelet akkor össze is lehet hasonlítani !
Még mindig a lőtéri kutyás se érdekli az mennyit késik egy lépés a kiadott step jelhez képest.
De egy ilyen fajta mérnök ezt direkt nem is akarja megérteni mert akkor igazat kellene adni magának az antikrisztusnak !
Viszont az jobban izgatja a tisztelt publikumot melyik léptető vezérlő csökkenti a legjobban a rezonanciát akár a 2 forintos gagyi NEMA 17-es léptetőmotoron !
Viszont tőled 99,999% hogy nem fogunk erről használható adatot kapni!
Csak a rotyszi ajnározása és ugyanaz a ronggyá linkelt 3 képet teszed fel lassan 10 éve !
Használható adatot itt még senki nem látott tőled csak ködös utalásokat amiben felajánlod a szolgálataidat ki tudja menyiért !
Nem az igazság fáj, mert amit eddig írtál abban semi igaz nincs, csak az az agresszív marketing és törtetés, taposás, lejáratás amit itt végzel !
Ha valaki nem polírozza az üleped fényesre az egyből "elmebeteg" vagy "nincs kellő szakmai alázat" stb stb !
Mellesleg:
Próbáltad már mit generál egy tachogenerátor összekötve egy szkóppal ?
Természetesen nem.
Így nekem ne gyere azzal, hogy nem lehet poziciót nézni !
A túlövések tökéletesen mutatják amikor eléri a pozíciót és ha alá beteszem a lépésjelet akkor össze is lehet hasonlítani !
Még mindig a lőtéri kutyás se érdekli az mennyit késik egy lépés a kiadott step jelhez képest.
De egy ilyen fajta mérnök ezt direkt nem is akarja megérteni mert akkor igazat kellene adni magának az antikrisztusnak !
Viszont az jobban izgatja a tisztelt publikumot melyik léptető vezérlő csökkenti a legjobban a rezonanciát akár a 2 forintos gagyi NEMA 17-es léptetőmotoron !
Viszont tőled 99,999% hogy nem fogunk erről használható adatot kapni!
Csak a rotyszi ajnározása és ugyanaz a ronggyá linkelt 3 képet teszed fel lassan 10 éve !
Használható adatot itt még senki nem látott tőled csak ködös utalásokat amiben felajánlod a szolgálataidat ki tudja menyiért !
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 17:33
Írta: 000000000 Dátum 2017 augusztus 31, 17:33
"Látom te beteg vagy!"
"amit eddig írtál abban semi igaz nincs, csak az az agresszív marketing és törtetés, taposás, lejáratás amit itt végzel !
Ha valaki nem polírozza az üleped fényesre az egyből "elmebeteg" vagy "nincs kellő szakmai alázat" stb"
"Használható adatot itt még senki nem látott tőled csak ködös utalásokat amiben felajánlod a szolgálataidat ki tudja menyiért!"
Úgy látom hiába kérnek, kérlek, hogy ilyen minősíthetelen stílusban ne írkáljál.[#ejnye1]
Az idézett mondataid helyett, a szakmai butaságok linkelése helyett lenne bőven értelmes agyi munkád, feladatod, amit szépen, tanulgatva az alapokat, végre elvégezhetnél azzal kapcsolatban, hogy egy szkópra kötött tachó jelalak az micsoda, mit látsz ilyenkor, és ennek mennyi köze van a forgó mozgást végző step motor pozíciójához.
Ja és ez majdnem lemaradt:
"Próbáltad már mit generál egy tachogenerátor összekötve egy szkóppal? Természetesen nem."
Honnan tudod te ezt ilyen magabiztosan? [#conf]
A valóság természtesen az, hogy igen, "véletlenül" 20 éves koromban a saját építésű szkópomon nézegettem már ezt a jelet. Kicsit rég volt, de a mai napig megvan ez a szkópom, és még szoktam is használgatni nosztalgiából vagy akár bemérésre is.
"amit eddig írtál abban semi igaz nincs, csak az az agresszív marketing és törtetés, taposás, lejáratás amit itt végzel !
Ha valaki nem polírozza az üleped fényesre az egyből "elmebeteg" vagy "nincs kellő szakmai alázat" stb"
"Használható adatot itt még senki nem látott tőled csak ködös utalásokat amiben felajánlod a szolgálataidat ki tudja menyiért!"
Úgy látom hiába kérnek, kérlek, hogy ilyen minősíthetelen stílusban ne írkáljál.[#ejnye1]
Az idézett mondataid helyett, a szakmai butaságok linkelése helyett lenne bőven értelmes agyi munkád, feladatod, amit szépen, tanulgatva az alapokat, végre elvégezhetnél azzal kapcsolatban, hogy egy szkópra kötött tachó jelalak az micsoda, mit látsz ilyenkor, és ennek mennyi köze van a forgó mozgást végző step motor pozíciójához.
Ja és ez majdnem lemaradt:
"Próbáltad már mit generál egy tachogenerátor összekötve egy szkóppal? Természetesen nem."
Honnan tudod te ezt ilyen magabiztosan? [#conf]
A valóság természtesen az, hogy igen, "véletlenül" 20 éves koromban a saját építésű szkópomon nézegettem már ezt a jelet. Kicsit rég volt, de a mai napig megvan ez a szkópom, és még szoktam is használgatni nosztalgiából vagy akár bemérésre is.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 17:41
Írta: 000000000 Dátum 2017 augusztus 31, 17:41
Akkor próbáld meg újra egy normális szkópon !
És utána mond ennyire magabiztosan !
De lehet, némi meglepetést fog okozni amit látsz.
Mondjuk úgysem fogod beismerni, hogy igazam volt !
Nekem csak egy gagyi 4 sugaras 250MHz szkóp jutott. [#nevetes1]
És utána mond ennyire magabiztosan !
De lehet, némi meglepetést fog okozni amit látsz.
Mondjuk úgysem fogod beismerni, hogy igazam volt !
Nekem csak egy gagyi 4 sugaras 250MHz szkóp jutott. [#nevetes1]
Cím: Re:Léptetőmotor
Írta: 2vkx6unz Dátum 2017 augusztus 31, 17:51
Írta: 2vkx6unz Dátum 2017 augusztus 31, 17:51
Szerintem a DC tachogenerátor tulajdonképpen egy dinamo ami a fordulaatszámmal arányos egyenfeszültséget állít elő. Ez itt kérem nyelvészkedés mert amúgy a generátort általában váltakozó feszültésget előállító gépre szokás alkalmazni ami a fordulatszámmal alrányos frekvenciájú és amplitúdójú jelet állít elő.
A linkelt videóban a szkópon levő jel a forgórész fordulatszám váltzását mutatja (felteszem, hogy a DC komponens le lett választva). Tibor viszont egy enkódert használt szeritnem erre a célra és ott a lengéseken kívül az adott léptetőmotor szöghelyzetét is lehet vizsgálni a lengéseken kívül. Ez azért hordoz némi többelt információt...
Ha a tachogenerátoros megoldás mellé oda teszed a léptető impulzusokat is akkor amíg van tüske addig láthatsz némi fázis eltérést, de mivel nincs egzakt pozíció elég nehéz megmondani hol milyen szöghelyzetben van a motor és hol is kelle lennie. Amúgy szerinetem nem az első túllövés csúcsánál van pozícióban, henem elötte a nulla átmenetnél de azt nem is lehet valójában detektálni mert még nem csengett le az előző jel. Így elég enhéz lenne a léptető jelhez képest fázist mérni és azt pozíció hibára átszámolni (és még mindíg nincs tényleges információ a motor valós szöghelyzetéről).
Szóval a videó jó szemlétetetése a léptető motor rezonancia problémájának és
Amint ráteszel egy csillapítót teljesen tönkrevágod a dinamikai képességeket - ezért sem lesz olyan lengés - de én nem szeretnék olyan gépen dolgozni amin ilyen feleslegesen forgó tömegek vannak mert vagy nagyon lassan lehetne vele dolgozni vagy nagyon pontatlanul esetleg mindkettő...
Szerintem fontos tudni, hogy a kiadott step jelhez képest hol is tartunk mozgásban mert kevés kivételtől eltekintve nincs visszacsatolás a léptetős rendszerekben és többnyire csak hisszük illetve bízunk benne hogy ott van ahol szeretnénk. A rezonancia csökkentésnek ára van - nem csak pénzben mérve - és mindenkinek el kell döntenie, hogy mibő mennyit áldoz be...
A linkelt videóban a szkópon levő jel a forgórész fordulatszám váltzását mutatja (felteszem, hogy a DC komponens le lett választva). Tibor viszont egy enkódert használt szeritnem erre a célra és ott a lengéseken kívül az adott léptetőmotor szöghelyzetét is lehet vizsgálni a lengéseken kívül. Ez azért hordoz némi többelt információt...
Ha a tachogenerátoros megoldás mellé oda teszed a léptető impulzusokat is akkor amíg van tüske addig láthatsz némi fázis eltérést, de mivel nincs egzakt pozíció elég nehéz megmondani hol milyen szöghelyzetben van a motor és hol is kelle lennie. Amúgy szerinetem nem az első túllövés csúcsánál van pozícióban, henem elötte a nulla átmenetnél de azt nem is lehet valójában detektálni mert még nem csengett le az előző jel. Így elég enhéz lenne a léptető jelhez képest fázist mérni és azt pozíció hibára átszámolni (és még mindíg nincs tényleges információ a motor valós szöghelyzetéről).
Szóval a videó jó szemlétetetése a léptető motor rezonancia problémájának és
Amint ráteszel egy csillapítót teljesen tönkrevágod a dinamikai képességeket - ezért sem lesz olyan lengés - de én nem szeretnék olyan gépen dolgozni amin ilyen feleslegesen forgó tömegek vannak mert vagy nagyon lassan lehetne vele dolgozni vagy nagyon pontatlanul esetleg mindkettő...
Szerintem fontos tudni, hogy a kiadott step jelhez képest hol is tartunk mozgásban mert kevés kivételtől eltekintve nincs visszacsatolás a léptetős rendszerekben és többnyire csak hisszük illetve bízunk benne hogy ott van ahol szeretnénk. A rezonancia csökkentésnek ára van - nem csak pénzben mérve - és mindenkinek el kell döntenie, hogy mibő mennyit áldoz be...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 18:10
Írta: 000000000 Dátum 2017 augusztus 31, 18:10
Most őszintén téged érdekel mennyit késik a pc által kiadott step jel és a valós elmozdulás ?
Ha késik akkor az összes tengely szinkronban késik, de ha 5 milliszekundummal később ér pozícióba szerintem azért senki nem fog eret vágni magán.
Mert engem nem nagyon érint meg, de az viszont igen, melyik vezérlő jó, jobb, legjobb, eredménnyel csillapítja akár a legagyibb léptetőmotor káros rezonanciáit.
Viszont erről soha nem fogunk objektív véleményt kapni, csak ha újra összerakom azt a gagyi mérőpadot, aztán publikálom az eredményeket.
Viszont egyenlőre örülök, hogy luk van a seggemen és szelel.
A régebbi Profi egyes vezérlőknél brutális rezonanciák jöttek ki, de a mostani Leadshine vezérlöket ( M, DM, AM ) érdemes lenne rezonancia tesztre feltenni.
Ha késik akkor az összes tengely szinkronban késik, de ha 5 milliszekundummal később ér pozícióba szerintem azért senki nem fog eret vágni magán.
Mert engem nem nagyon érint meg, de az viszont igen, melyik vezérlő jó, jobb, legjobb, eredménnyel csillapítja akár a legagyibb léptetőmotor káros rezonanciáit.
Viszont erről soha nem fogunk objektív véleményt kapni, csak ha újra összerakom azt a gagyi mérőpadot, aztán publikálom az eredményeket.
Viszont egyenlőre örülök, hogy luk van a seggemen és szelel.
A régebbi Profi egyes vezérlőknél brutális rezonanciák jöttek ki, de a mostani Leadshine vezérlöket ( M, DM, AM ) érdemes lenne rezonancia tesztre feltenni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 18:33
Írta: 000000000 Dátum 2017 augusztus 31, 18:33
Így van, nagyon helyesen írtad, a tachó jel az szögsebesség (fordulatszám) jel, és nem szögpozíció. Ezt bizony illene tudni Pálnak, kár neki erőlködni, de majd szép lassan megérti a tényeket, és nem ír olyan komolytalan szakmaiatlanságot (megspékelve a minősíthetetlen egyéb mondataival is), hogy a Robsy motordinamikai mérőrendszert megpróbálja egy olyan primitív méréssel pótolni, miszerint:
"A nagy csodás mérőpadhoz elég egy tachogenerátor és egy oszcilloszkóp."
Ugyan már kérem szépen, ez még viccnek is rossz![#nevetes1]
"Szerintem fontos tudni, hogy a kiadott step jelhez képest hol is tartunk mozgásban mert kevés kivételtől eltekintve nincs visszacsatolás a léptetős rendszerekben és többnyire csak hisszük illetve bízunk benne hogy ott van ahol szeretnénk."
Örülök, hogy Te is így gondolod, ez a beszéd! [#eljen]
"A nagy csodás mérőpadhoz elég egy tachogenerátor és egy oszcilloszkóp."
Ugyan már kérem szépen, ez még viccnek is rossz![#nevetes1]
"Szerintem fontos tudni, hogy a kiadott step jelhez képest hol is tartunk mozgásban mert kevés kivételtől eltekintve nincs visszacsatolás a léptetős rendszerekben és többnyire csak hisszük illetve bízunk benne hogy ott van ahol szeretnénk."
Örülök, hogy Te is így gondolod, ez a beszéd! [#eljen]
Cím: Re:Léptetőmotor
Írta: 2vkx6unz Dátum 2017 augusztus 31, 18:47
Írta: 2vkx6unz Dátum 2017 augusztus 31, 18:47
Az hogy mennyire érdekel, hogy hol van a step jel által feltételezett pozícióhoz képest az alkalmazásfüggő. Mert ugyan önmagában egy adott motor egy adott vezérlóvel a 3 különböző tengelyre szerelve egész másképp képes működni és egy adott pozíciót felvenni. Az biztos, hogy nem egy a tengelyre szerelt tárcsával próbálnám meg kiküszöbölni a rezonanciát.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 18:54
Írta: 000000000 Dátum 2017 augusztus 31, 18:54
Akkor ezt próbáld meg értelmezni.
De csak egy eredményre juthatsz ezzel kapcsolatban, hogy igazam van !
Tökéletesen látni hol kezd új lépésbe a motor akár egy tachogenerátorral is, mivel valós elmozduláshoz tartozó jelek láthatóak. (akinek úgy jobban tetszik egy dinamóval)
Aki picit is ért az elektronikához az nekem fog igazat adni, mert a léptetőmotor alap tulajdonsága a rezonancia.
Aztán így a legkisebb rezzenést is látni lehet.
De ami a legszebb ezt még egy mikrofonnal is meg lehet csinálni, de az nem lesz ennyire szép !
Tehát kár törnöd megad ez neked vesztett ügy !
(https://hobbicncforum.hu/uploaded_images/2017/08/tn_i2tym5zc2ifgftejvc0p9_705.jpg) (https://hobbicncforum.hu/uploaded_images/2017/08/i2tym5zc2ifgftejvc0p9_705.jpg)
De csak egy eredményre juthatsz ezzel kapcsolatban, hogy igazam van !
Tökéletesen látni hol kezd új lépésbe a motor akár egy tachogenerátorral is, mivel valós elmozduláshoz tartozó jelek láthatóak. (akinek úgy jobban tetszik egy dinamóval)
Aki picit is ért az elektronikához az nekem fog igazat adni, mert a léptetőmotor alap tulajdonsága a rezonancia.
Aztán így a legkisebb rezzenést is látni lehet.
De ami a legszebb ezt még egy mikrofonnal is meg lehet csinálni, de az nem lesz ennyire szép !
Tehát kár törnöd megad ez neked vesztett ügy !
(https://hobbicncforum.hu/uploaded_images/2017/08/tn_i2tym5zc2ifgftejvc0p9_705.jpg) (https://hobbicncforum.hu/uploaded_images/2017/08/i2tym5zc2ifgftejvc0p9_705.jpg)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 augusztus 31, 18:59
Írta: svejk Dátum 2017 augusztus 31, 18:59
Hát ha majd még jönnek a szervo késleltetéseinek a "grafikinjai" !!
Sírva fog mindenki szaladni majd a Klaviohoz léptetőmotort venni. :)
Azokat legalább óvatosan használja a ember mert különben lépést veszt, de a szervokat meg hajtják mint állat a hobbisták, mert az "nem tilt le, meg úgy is behozza a lemaradást".
Sírva fog mindenki szaladni majd a Klaviohoz léptetőmotort venni. :)
Azokat legalább óvatosan használja a ember mert különben lépést veszt, de a szervokat meg hajtják mint állat a hobbisták, mert az "nem tilt le, meg úgy is behozza a lemaradást".
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 19:04
Írta: 000000000 Dátum 2017 augusztus 31, 19:04
Kérem, valaki állítsa meg ennek az embenek az ámokfutását, aki már az orbitális szakmai hazugságait, tévedéseit is szándékosan duplázva rombolja szét a topikot, mint annak idején a Robsy topikot is.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 19:05
Írta: 000000000 Dátum 2017 augusztus 31, 19:05
Ott a pont és mégis megcsinálja a csapágy illesztés ! [#vigyor2]
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 augusztus 31, 19:05
Írta: svejk Dátum 2017 augusztus 31, 19:05
Már amelyik. :(
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 19:12
Írta: 000000000 Dátum 2017 augusztus 31, 19:12
Tudod jól legalább 10 éve AC használok, Te rontottál meg az AC szervókkal.
Azóta nem kísérleteztem léptetőmotorokkal.
Azóta nem kísérleteztem léptetőmotorokkal.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 19:21
Írta: 000000000 Dátum 2017 augusztus 31, 19:21
Itt sokan sírva fakadnának, ha egy mikron felbontású koordináta mérőgépen szembesülnének az ovalitási, felületi érdességi mérési eredményekkel egy hobby gépen készült (de akár még iparin is) furatmarás bemérése kapcsán.
Az ilyen hibákért pedig döntően a mellékhajtások pozicinálási problémaköre is döntően felelős, tehát azoknak, akiket egy picit is érdeklődnek, hogy valóban a legjobbat hozzák ki a kis hobby gépükből, nos azoknak ezek a pozíció bemérési tesztek nagyon tanulságosak lehetnek.
Az ilyen hibákért pedig döntően a mellékhajtások pozicinálási problémaköre is döntően felelős, tehát azoknak, akiket egy picit is érdeklődnek, hogy valóban a legjobbat hozzák ki a kis hobby gépükből, nos azoknak ezek a pozíció bemérési tesztek nagyon tanulságosak lehetnek.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 19:44
Írta: 000000000 Dátum 2017 augusztus 31, 19:44
Figyelted már a fenti fejlécben mi látható ?
Ide bemásolom, hogy ne kelljen felfelé görgetned.
. HobbyCNC fórum
Akinek mikronos megmunkálásra van szüksége és 0.02µm felületi érdességere az biztos nem ide fog jönni megmunkáltatni.
Akinek meg van 0.001mm-es mérőórája az tudja, hogy merev anyag se létezik.
Ide bemásolom, hogy ne kelljen felfelé görgetned.
. HobbyCNC fórum
Akinek mikronos megmunkálásra van szüksége és 0.02µm felületi érdességere az biztos nem ide fog jönni megmunkáltatni.
Akinek meg van 0.001mm-es mérőórája az tudja, hogy merev anyag se létezik.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 19:51
Írta: 000000000 Dátum 2017 augusztus 31, 19:51
Nem kell ez a 0.02 mikronos nagyképű duma, mert századokról, tizedekről beszélünk, ami már hobby szinten se mindegy.
Az értelmes dolgod pedig meglenne, hogy állsz a tacho jel megértésével, mi is az amit ott látsz? Mi köze van annak a léptető motor pozíciójához?[#nyes]
Az értelmes dolgod pedig meglenne, hogy állsz a tacho jel megértésével, mi is az amit ott látsz? Mi köze van annak a léptető motor pozíciójához?[#nyes]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 augusztus 31, 20:04
Írta: 000000000 Dátum 2017 augusztus 31, 20:04
Erről nem kell meggyőznöd mert tisztában vagyok mikre képesek ezek a hobby gépek.
Viszont ez a "0.02 mikronos" duma és utóbbi mondatod (kérdésed) csak szánalmas kötekedés, mert már nem tudod ész érvekkel cáfolni az állításomat.
Mellesleg a 0.02µm a felületi érdességere értendő.
Viszont ez a "0.02 mikronos" duma és utóbbi mondatod (kérdésed) csak szánalmas kötekedés, mert már nem tudod ész érvekkel cáfolni az állításomat.
Mellesleg a 0.02µm a felületi érdességere értendő.
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 szeptember 01, 06:21
Írta: 4ybj8h3c8 Dátum 2017 szeptember 01, 06:21
Bementem a műszereimhez és megkérdeztem, de egyiken sem panaszkodott a banándugó, vagy a DS csatlakozó, hogy nem mikronos pontossággal vágtam ki a helyüket.
A NASA és a hobbi szint között van némi különbség.
A NASA és a hobbi szint között van némi különbség.
Cím: Re:Léptetőmotor
Írta: remrendes Dátum 2017 szeptember 01, 07:10
Írta: remrendes Dátum 2017 szeptember 01, 07:10
Azert vessunk egy pillantast pl Farkas Adam gepere. Ot szerintem igen csak zavarna, ha tizedes pontossagu lenne a gepe. Szoval szerintem azert van nemi letjogosultsaga a dolognak itt is.
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 szeptember 01, 07:19
Írta: 4ybj8h3c8 Dátum 2017 szeptember 01, 07:19
Persze, hogy van. De felhasználásfüggő.
T-nek az nem megy át a felfogásán, hogy játszótéri farönkbútort nem ezredmilliméteres pontosságú gépparkkal, és ezzel ellentétben NASA űrtechnikát nem fióksínes géppel fognak gyártani. Mindenki azt használja ami a feladatának és a pénztárcájának megfelel.
T-nek az nem megy át a felfogásán, hogy játszótéri farönkbútort nem ezredmilliméteres pontosságú gépparkkal, és ezzel ellentétben NASA űrtechnikát nem fióksínes géppel fognak gyártani. Mindenki azt használja ami a feladatának és a pénztárcájának megfelel.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 01, 07:23
Írta: 000000000 Dátum 2017 szeptember 01, 07:23
Nem véletlen HobbyCNC fórum a neve. [#nevetes1]
Cím: Re:Léptetőmotor
Írta: svager Dátum 2017 szeptember 01, 07:31
Írta: svager Dátum 2017 szeptember 01, 07:31
Javaslom aki nem tudja hasznosítani a Tibor altal elhangzó észrevételeket\tanácsokat,esetleg már túl is lépett ezen a szinten,keressen más elfoglaltságot,vagy komolyabb kihivást magának,és ne ítt trollkodja szét a topikokat.
Lehet nekik már unalmas,de vam ítt tőbb 100 fórumozó akit érdekelhet.
Lehet nekik már unalmas,de vam ítt tőbb 100 fórumozó akit érdekelhet.
Cím: Re:Léptetőmotor
Írta: remrendes Dátum 2017 szeptember 01, 07:35
Írta: remrendes Dátum 2017 szeptember 01, 07:35
Viszont vannak igenyesebb felhasznalok, akik lehet, hogy megprobalnak kihozni a maximumot az adott keretek kozott is. Ami szinten lehetseges, hogy nem is penztarcafuggo, csak pl egy masik leptetovezerlon mulik.
Az is elofordulhat, hogy a faronkbutort gyarto, kevesbbe hobby felhasznalo, mint akinek porosodik a garazsban egy ezred mm-es pontossagu gepe.
Az is elofordulhat, hogy a faronkbutort gyarto, kevesbbe hobby felhasznalo, mint akinek porosodik a garazsban egy ezred mm-es pontossagu gepe.
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 szeptember 01, 07:46
Írta: 4ybj8h3c8 Dátum 2017 szeptember 01, 07:46
De ezt mindenkinek saját magának kell eldönteni, nem vezényszóra, mert egy valakinek ez a becsípődése és senki nem köteles eltűrni azt, hogy lenézzék és pocskondiázzák ezért.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 01, 08:46
Írta: 000000000 Dátum 2017 szeptember 01, 08:46
Beírásodból két dolgot (szakmaiatlanság és gúnyolódás) is érzek, és ezek együttállása kapcsán régebben ki tudtak hozni a béketűrésből, de ez most már nem megy senkinek. Amikor ugyanis belépek ide, annak a kb. 5-6 szokásos kötekedő ám de szakmai érv nélküli ember kedvéért az agyamban bekapcsolom a Hobby CNC fórumra kifejlesztett Robsy PID kört. Nagyon hasznosan, és jól teszi a dolgát, mert mindig higgadt maradok, és csak szakmai érvekkel reagálok.
A fentiek szellemében tehát próbálok segíteni a megértésben neked is. Az 5304-es bejegyzésemben publikáltam egy Nema17-es motor bemérést bizonyos mérési feltételek mellett. Nézzük meg ennek egy kinagyított origótól kezdődő részét, ezt:
(http://www.robsy.hu/te2/robsy-motor-measure79-10.gif)
Nullától 10-ig a kiadott step jeleket sorszámoztam, és ragyogóan látszik, mekkora pozíció hibával dolgozik a motor a valóságban, hiszen az ideális esetben egy a zöld pontokon átmenő 45 fokos egyenest kellene látnunk. Ezzel szemben a szomorú valóság, hogy csak "véletlenül" metszi héba-hóba a valós (piros) pozíció görbe az ideálisat, esetünkbe ez csak a 10 stepjel kiadási pillanatában van, addig hol kisebb hol nagyobb igen durva lemaradásban van a motor. Ennek a bemért pozícióhibának a vizsgált szakaszon jól láthatóan a 4, 5, 6, 7 pontokon vannak a maximumjai. Ha ezt számszerűsítjük, akkor 4-5 mikrostepnek megfelelő a pozíció hiba.
HOPPÁ kedves barátaim! Mit is jelenet ez a Hobbsyta direkthajtású egy motor fordulatra 40 mm-t elmozduló rugalmas fogazott szíjhajtású lézer vagy 3D nyomtató gépe esetén? Bizony 0.1 tized mm-nél is nagyobb alaphibát. Egy jól beállított lézersugár fókuszpontja ettől kevesebb még hobbyban is. Szerintem a tized milliméteres hibák amik csak a hajtásból erednek (hol van még a mechanikai, merevségi hibák összhatása) már akkora, hogy egy hobbystának is érdeke, hogy ezt csökkentse, odafigyeljen rá. Hiszen az ilyen hibák miatt csíkos, hullámos, cikk-cakkos egy gravírozott kép általában.
Az is szerintem meghökkentő, hogy a "butuska" vezérlőnk igazmondási rátája 10 % alatt van, mert kb. minden tizedik kiadott stepjel után van nagyjából abban a pontban a tengely, amit az a szemünkbe tol állandóan csodálatos grafikus dizájn mellett.
A Robsy motordinamikai mérőrendszer különösen fontos adatokat szolgáltat, és ez remekül látszik is a hajtás időállandójával kapcsolatban is, hiszen nézzétek csak: 0, 1, 2, 3 stepjelig állva marad a motor. Elég baj ez a Hobbystának is mert azt hiszi már régen forgácsol a gépe, vagy lézerezik, hollott csak áll a motor és próbál szegény a saját műszaki törvényei alapján elindulni, reagálni.
Remélem ezen érvek, tanulságok után picit lanyhul a topikromboló támadási kedv, és ahogy szoktam mondani a szakmai alázat, gondolkodási folyamat a tények mentén lép a helyére.
Végül de nem utolsósorban köszönöm azon Kollégáknak, Fórumtársaknak a beirásaikat, Akik biztanak, védenek, és látják értelmét még egy Hobby fórumon is a Robsy féle "tényfeltáró" írásoknak.
A fentiek szellemében tehát próbálok segíteni a megértésben neked is. Az 5304-es bejegyzésemben publikáltam egy Nema17-es motor bemérést bizonyos mérési feltételek mellett. Nézzük meg ennek egy kinagyított origótól kezdődő részét, ezt:
(http://www.robsy.hu/te2/robsy-motor-measure79-10.gif)
Nullától 10-ig a kiadott step jeleket sorszámoztam, és ragyogóan látszik, mekkora pozíció hibával dolgozik a motor a valóságban, hiszen az ideális esetben egy a zöld pontokon átmenő 45 fokos egyenest kellene látnunk. Ezzel szemben a szomorú valóság, hogy csak "véletlenül" metszi héba-hóba a valós (piros) pozíció görbe az ideálisat, esetünkbe ez csak a 10 stepjel kiadási pillanatában van, addig hol kisebb hol nagyobb igen durva lemaradásban van a motor. Ennek a bemért pozícióhibának a vizsgált szakaszon jól láthatóan a 4, 5, 6, 7 pontokon vannak a maximumjai. Ha ezt számszerűsítjük, akkor 4-5 mikrostepnek megfelelő a pozíció hiba.
HOPPÁ kedves barátaim! Mit is jelenet ez a Hobbsyta direkthajtású egy motor fordulatra 40 mm-t elmozduló rugalmas fogazott szíjhajtású lézer vagy 3D nyomtató gépe esetén? Bizony 0.1 tized mm-nél is nagyobb alaphibát. Egy jól beállított lézersugár fókuszpontja ettől kevesebb még hobbyban is. Szerintem a tized milliméteres hibák amik csak a hajtásból erednek (hol van még a mechanikai, merevségi hibák összhatása) már akkora, hogy egy hobbystának is érdeke, hogy ezt csökkentse, odafigyeljen rá. Hiszen az ilyen hibák miatt csíkos, hullámos, cikk-cakkos egy gravírozott kép általában.
Az is szerintem meghökkentő, hogy a "butuska" vezérlőnk igazmondási rátája 10 % alatt van, mert kb. minden tizedik kiadott stepjel után van nagyjából abban a pontban a tengely, amit az a szemünkbe tol állandóan csodálatos grafikus dizájn mellett.
A Robsy motordinamikai mérőrendszer különösen fontos adatokat szolgáltat, és ez remekül látszik is a hajtás időállandójával kapcsolatban is, hiszen nézzétek csak: 0, 1, 2, 3 stepjelig állva marad a motor. Elég baj ez a Hobbystának is mert azt hiszi már régen forgácsol a gépe, vagy lézerezik, hollott csak áll a motor és próbál szegény a saját műszaki törvényei alapján elindulni, reagálni.
Remélem ezen érvek, tanulságok után picit lanyhul a topikromboló támadási kedv, és ahogy szoktam mondani a szakmai alázat, gondolkodási folyamat a tények mentén lép a helyére.
Végül de nem utolsósorban köszönöm azon Kollégáknak, Fórumtársaknak a beirásaikat, Akik biztanak, védenek, és látják értelmét még egy Hobby fórumon is a Robsy féle "tényfeltáró" írásoknak.
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 szeptember 01, 09:03
Írta: 4ybj8h3c8 Dátum 2017 szeptember 01, 09:03
Az első bekezdés felesleges, ez csak a finomított verziója a valódnak amitől itt már páran elájultak, hogy mennyire más lettél, kicsit állíts még azon a PID szabályzón és az ilyen jellegű megjegyzések végleg szűrődjenek ki.
A többit meg soha, sehol nem vitattam, szóval rossz helyre címezted.
Annyit hozzátennék, hogy ugyan mondtam már itt, de senki nem foglalkozott vele (pont mint azzal amiket te mondasz), hogy néhány léptetőmotor vezérlőnek van egy nagyon idióta alaptulajdonsága, az áram visszakorlátozása jel nélküli helyzetben, és nagyrészt ez okozza azt amit írtál, hogy az első lépéseknél még nincs mozgás.
A többit meg soha, sehol nem vitattam, szóval rossz helyre címezted.
Annyit hozzátennék, hogy ugyan mondtam már itt, de senki nem foglalkozott vele (pont mint azzal amiket te mondasz), hogy néhány léptetőmotor vezérlőnek van egy nagyon idióta alaptulajdonsága, az áram visszakorlátozása jel nélküli helyzetben, és nagyrészt ez okozza azt amit írtál, hogy az első lépéseknél még nincs mozgás.
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 szeptember 01, 09:05
Írta: 4ybj8h3c8 Dátum 2017 szeptember 01, 09:05
Az viszont érdekelne, hogy egy lineáris vezérlésnél mitől van ez a belengés amit a piros vonal ábrázol.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2017 szeptember 01, 09:34
Írta: ANTAL GÁBOR Dátum 2017 szeptember 01, 09:34
Kár hogy a vizsgálatnál a (beállított) mikrolépések számára nem találunk utalást. Hacsak a 40 mm-es elmozdulásnál létrejött kb 100 mikronos hibából nem indulunk ki . Ha ehhez 5 hiba kellett akkor egy step = 20 mikron Vagyis 2000 a mikrolépések száma
Ha ugyanez a hajtás egy 5 ös golyósorsóra dolgozik
( gravírgépe van nem lézer ) a hiba elvileg 12.5 mikron .
Ez a szomorú valóság ... De sok hobbista azért nem dől a kardjába .
Ha ugyanez a hajtás egy 5 ös golyósorsóra dolgozik
( gravírgépe van nem lézer ) a hiba elvileg 12.5 mikron .
Ez a szomorú valóság ... De sok hobbista azért nem dől a kardjába .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 01, 10:06
Írta: 000000000 Dátum 2017 szeptember 01, 10:06
"Kár hogy a vizsgálatnál a (beállított) mikrolépések számára nem találunk utalást."
Inkább az a kár, hogy az eredeti bemérési görbén közölt adatokat nem akarod meglátni, értelmezni. Pedig ott van minden.
Azaz tévedtél, nem mondasz igazat, és így erre alapozva már veszélyes újabb állításokat tenned. Tudod ez olyan, mint amikor egy matek egyenletet eleve rosszul állítasz fel egy szöveges példa kapcsán. Ha meg is oldod sok munkával netán még helyesen is, a végereményed a valóságot tekintve csakis rossz lehet.
Inkább az a kár, hogy az eredeti bemérési görbén közölt adatokat nem akarod meglátni, értelmezni. Pedig ott van minden.
Azaz tévedtél, nem mondasz igazat, és így erre alapozva már veszélyes újabb állításokat tenned. Tudod ez olyan, mint amikor egy matek egyenletet eleve rosszul állítasz fel egy szöveges példa kapcsán. Ha meg is oldod sok munkával netán még helyesen is, a végereményed a valóságot tekintve csakis rossz lehet.
Cím: Re:Léptetőmotor
Írta: Zozi Dátum 2017 szeptember 01, 10:10
Írta: Zozi Dátum 2017 szeptember 01, 10:10
Szia, ehhez a méréshez megosztanád a motor adatait is? Az eredmények sokkal többet mondanak bemenő adatokkal, léptetési értékekkel esetleg feszültség adatokkal.
Cím: Re:Léptetőmotor
Írta: designr Dátum 2017 szeptember 01, 10:20
Írta: designr Dátum 2017 szeptember 01, 10:20
Pár hónappal ezelőtt hosszú zöngéket hallottunk egy fórumtárs grafikonjáról..miszerint mi ez a szakmaiatlan ábra ahol a tengelyek csak úgy jelölés,megnevezés nélkül oda vannak hányva..megkeresem ha gondolod..te irtad.Legyünk igényesek..tudja a hobbista mit hasonlít mivel..mennyi az annyi..
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 01, 10:21
Írta: 000000000 Dátum 2017 szeptember 01, 10:21
A léptető motort a vezérlőprogram egységugrások sorozatával piszkálja a step-dir küldés kapcsán. A motor gépészeti és villamos modellként is erre a periodikus gerjesztésre a saját időállandói kapcsán reagál, és az úgynevezett saját vagy rezonacia frekvenciájának a környeztében meglehetősen vadul visszavág. Ennek kőkemény differenciál egyenlet és matek leíró rendszere van, ha nem haragszol nem mennék bele, mert nekem is nagy falat lenne.
Egyszerűbb, ha ezt kimérjük egy adott motorra, pl. a Robsy mérőrendszer ebben is nagy segítséget ad. Hiszen utána bemérhetjük ugyanazt a motort egy másik vezérlővel, amivel aztán esetleg alig rezonál ebben a tartományban. Ezek után ezen mérési eredmények birtokában ha hobby ha profi gépet hajtunk egy kevésbé rezonáló hajtástechnikával, azzal csakis nyerhetünk.
Egyszerűbb, ha ezt kimérjük egy adott motorra, pl. a Robsy mérőrendszer ebben is nagy segítséget ad. Hiszen utána bemérhetjük ugyanazt a motort egy másik vezérlővel, amivel aztán esetleg alig rezonál ebben a tartományban. Ezek után ezen mérési eredmények birtokában ha hobby ha profi gépet hajtunk egy kevésbé rezonáló hajtástechnikával, azzal csakis nyerhetünk.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 01, 10:23
Írta: 000000000 Dátum 2017 szeptember 01, 10:23
Replay 5376!!!!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 01, 10:51
Írta: 000000000 Dátum 2017 szeptember 01, 10:51
Ennél a mérésnél a teljes diagramon már közöltem pár fontos mootor adatot, nézd meg megint kérlek.
A mért léptető motor további részletes adatait pl. a Klavio Kft honlapján tanulmányozhatod. (https://webaruhaz.klavio.hu/?id=85b75cfc564c4822863dbd4884138991&p=termeklap&tkod=25)
A mért léptető motor további részletes adatait pl. a Klavio Kft honlapján tanulmányozhatod. (https://webaruhaz.klavio.hu/?id=85b75cfc564c4822863dbd4884138991&p=termeklap&tkod=25)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2017 szeptember 01, 11:15
Írta: s7manbs8 Dátum 2017 szeptember 01, 11:15
Ez rendben van, hogy így viselkedik egy léptető motor.
A kérdésünk azonban az, hogy neked milyen léptető motor hajtásod van, ami által a valós görbe szinte teljesen rásimul az elméletire.
Kérünk egy olyan ábrát is.
A kérdésünk azonban az, hogy neked milyen léptető motor hajtásod van, ami által a valós görbe szinte teljesen rásimul az elméletire.
Kérünk egy olyan ábrát is.
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2017 szeptember 01, 11:18
Írta: KBalázs Dátum 2017 szeptember 01, 11:18
Érdekelne milyen típusú, mekkora felbontású encoder adta a szögelfordulás jelét.
Illetve kimutatható-e hogy teljes ill. féllépésekkor mekkora hibával áll be a motor a szögbe.
Illetve érdekes lenne nem folyamatos fordulaton, hanem adott szögben megállva mérni, nyugalmi helyzetben mekkora a szöghiba (mármint mikrolépésekkor is).
Mert a grafikon ha jól értem 135 RPM mellett mért adatokat mutat.
Illetve kimutatható-e hogy teljes ill. féllépésekkor mekkora hibával áll be a motor a szögbe.
Illetve érdekes lenne nem folyamatos fordulaton, hanem adott szögben megállva mérni, nyugalmi helyzetben mekkora a szöghiba (mármint mikrolépésekkor is).
Mert a grafikon ha jól értem 135 RPM mellett mért adatokat mutat.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 01, 15:53
Írta: 000000000 Dátum 2017 szeptember 01, 15:53
A lézer topik 12414-ben egy egész lépéses bemérési eredménnyel nyitottam a témát, talán ez elkerülte a figyelmedet. Ez a kérdéseid zömére is választ ad, íme:
(http://www.robsy.hu/te2/robsy-motor-measure18.gif)
Az encodert úgy kell kiválasztani, hogy minimum a vizsgált step/fordulat motor maximum vizsgálati felbontásának a 3-4 szeresét tudjad belőle kinyerni. Ezt lehet utána még pozíció jelfeldolgozási interpolációs algoritmussal növelni a mérőprogramban.
Csak egy lépés vizsgálatáról már évekkel ezelőtt tettem fel képet, a Robsy motordinamikai mérések fejezetben tudsz erről többet olvasni. (http://www.robsy.hu/te2/tem2.htm)
(http://www.robsy.hu/te2/robsy-motor-measure18.gif)
Az encodert úgy kell kiválasztani, hogy minimum a vizsgált step/fordulat motor maximum vizsgálati felbontásának a 3-4 szeresét tudjad belőle kinyerni. Ezt lehet utána még pozíció jelfeldolgozási interpolációs algoritmussal növelni a mérőprogramban.
Csak egy lépés vizsgálatáról már évekkel ezelőtt tettem fel képet, a Robsy motordinamikai mérések fejezetben tudsz erről többet olvasni. (http://www.robsy.hu/te2/tem2.htm)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 01, 16:09
Írta: 000000000 Dátum 2017 szeptember 01, 16:09
Az adatbázisaimban eddig négy féle motormeghajtót mértem be alaposabban: DRV8255, TB6560, TB67S109, MSD50-4.2, következik majd a TB6600.
Én csak ezeket használom (igaz saját panel nyáktervvel, mérések által visszaigazolt setup paraméterekkel). Nem vacakolok már teljesen saját tervezésű és készítésű mikrostep hajtással, amikor 500 Ft-ért is vehetsz készen.
Az pedig hogy melyik motorral, melyik vezérlő a legjobb, azt nem árulnám most még el, több évnyi szellemi termék munka van ezekbe a mérésekbe, mérőprogram verziókban. Egyébként is tudod egyesek szerint a "közhangulat" az, hogy ez egy Hobby oldal, a "lőtéri kutyát" nem érdeklik ezek.:)
Ábrák pedig majd még lesznek idővel.
Én csak ezeket használom (igaz saját panel nyáktervvel, mérések által visszaigazolt setup paraméterekkel). Nem vacakolok már teljesen saját tervezésű és készítésű mikrostep hajtással, amikor 500 Ft-ért is vehetsz készen.
Az pedig hogy melyik motorral, melyik vezérlő a legjobb, azt nem árulnám most még el, több évnyi szellemi termék munka van ezekbe a mérésekbe, mérőprogram verziókban. Egyébként is tudod egyesek szerint a "közhangulat" az, hogy ez egy Hobby oldal, a "lőtéri kutyát" nem érdeklik ezek.:)
Ábrák pedig majd még lesznek idővel.
Cím: Re:Léptetőmotor
Írta: kaqkk007 Dátum 2017 szeptember 01, 20:44
Írta: kaqkk007 Dátum 2017 szeptember 01, 20:44
"melyik motorral, melyik vezérlő a legjobb, azt nem árulnám most még el" Ne haragudj de nem pap vagy véletlenül ? Minden hozzászólásod olyan mint ha misét hallgatnék , a hívők biztosan feltétel nélkül elhiszik de aki gondolkodik abban felmerülnek kételyek soha egy számokkal alátámasztott mérési eredmény csak ábrák vonalak mindenféle megfogható dimenzió nélkül .....
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 01, 20:57
Írta: 000000000 Dátum 2017 szeptember 01, 20:57
Replay 5376!!!!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 01, 21:06
Írta: 000000000 Dátum 2017 szeptember 01, 21:06
A megszűnt fórumon is ugyanez volt sajnos [#szomoru1]
A kezdet kezdetétől ott lévő fórumozók közel 8-9 éve mióta regisztrált, csak ezt láttuk.
Jön a mézesmadzag, aztán semmi.
De egy újszülöttnek minden vicc új !
A kezdet kezdetétől ott lévő fórumozók közel 8-9 éve mióta regisztrált, csak ezt láttuk.
Jön a mézesmadzag, aztán semmi.
De egy újszülöttnek minden vicc új !
Cím: Re:Léptetőmotor
Írta: kaqkk007 Dátum 2017 szeptember 01, 21:10
Írta: kaqkk007 Dátum 2017 szeptember 01, 21:10
Értem én a viccet , de nem nagyon szeretem ...De úgy látom nem vagyok egyedül a véleményemmel ..
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2017 szeptember 01, 21:11
Írta: PSoft Dátum 2017 szeptember 01, 21:11
Én inkább tanárt mondanék, mint papot.
Aki Tibort ismeri személyes, vagy akár kollektív szakmai beszélgetés kapcsán,(pld. egy-egy tali)az tudja miért mondom ezt.
Aki Tibort ismeri személyes, vagy akár kollektív szakmai beszélgetés kapcsán,(pld. egy-egy tali)az tudja miért mondom ezt.
Cím: Re:Léptetőmotor
Írta: kaqkk007 Dátum 2017 szeptember 01, 21:18
Írta: kaqkk007 Dátum 2017 szeptember 01, 21:18
Lehet hogy szemtől szembe Ő egy tanár de amióta a fórumot követem azóta csak ezt látom a hozzászólásaiban amit Pál tökéletesen megfogalmazott..
Cím: Re:Léptetőmotor
Írta: fn47xk7ei Dátum 2017 szeptember 01, 21:22
Írta: fn47xk7ei Dátum 2017 szeptember 01, 21:22
Szerintem csak a falkaszellem uralkodik ...lásd pld.: Nema17 0,47Nm Stepmotor/DRV8825 vagy ... S:200 N: .25 1/s ... olvassam még ? Nem kéne már ez a cirkusz mert egy idő után unalmas mindenkinek .[#ejnye1] Tovább kellene lépni .[#nevetes1]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 01, 21:23
Írta: 000000000 Dátum 2017 szeptember 01, 21:23
Replay 5376!!!!
Sajnálom, hogy a tahós-szkópos szakmaiatlanságaid után még mindig csak topikot rombolsz. A főnök remélem megunja most már gyorsan.
Sajnálom, hogy a tahós-szkópos szakmaiatlanságaid után még mindig csak topikot rombolsz. A főnök remélem megunja most már gyorsan.
Cím: Re:Léptetőmotor
Írta: kaqkk007 Dátum 2017 szeptember 01, 21:27
Írta: kaqkk007 Dátum 2017 szeptember 01, 21:27
Nem próbáltam senkit követni , de mivel szépen kérted tovább lépek [#banplz]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 01, 21:44
Írta: 000000000 Dátum 2017 szeptember 01, 21:44
A tachos szkópos eszközzel neked mikroszekundumra megmondom mennyi a lépés jel és a valós elmozdulás között idő.
Mert anno félmilliós szkópról beszélünk ami mindent kiír a kijelzőre.
De mivel 10 éve volt mikor utoljára szórakoztam így léptetőmotorral azóta már csak a szkóp maradt meg.
Viszont én még annyival ki tudom egészíteni amivel a tekercsekben kialakuló áramot is meg tudom jeleníteni ezzel szinkronban.
Tehát azt is látom mennyit késik az adott vezérlő az elmozdulás és a step jel.
Nem kell tovább fokoznod, mert rég vesztettél lejárató kampányoddal !
Az az egy szerencséd, hogy nincs időm újra ilyenekkel szórakozni és publikálni !
Mert anno félmilliós szkópról beszélünk ami mindent kiír a kijelzőre.
De mivel 10 éve volt mikor utoljára szórakoztam így léptetőmotorral azóta már csak a szkóp maradt meg.
Viszont én még annyival ki tudom egészíteni amivel a tekercsekben kialakuló áramot is meg tudom jeleníteni ezzel szinkronban.
Tehát azt is látom mennyit késik az adott vezérlő az elmozdulás és a step jel.
Nem kell tovább fokoznod, mert rég vesztettél lejárató kampányoddal !
Az az egy szerencséd, hogy nincs időm újra ilyenekkel szórakozni és publikálni !
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2017 szeptember 01, 22:06
Írta: zozo Dátum 2017 szeptember 01, 22:06
Pedig én sokat tanultam a lentiekből.
Mégpedig, hogy akármit csinálunk, a stepper motor csak úgy képes lépkedni, mintha reszelőn húzkodott dróttal adnánk neki a step jeleket. Pozíciót téveszt, lépést veszít stb. Igaz nem mindegy, hogy simító reszelőt, kettős simítót, vagy káposzta reszelőt használunk, de ezt sajnos sosem tudjuk meg.
Abba már bele sem merek gondolni, hogy egy vezérlőre visszacsatolt enkóderes steppermotor hogyan rángana a korrekciók miatt, milyen randa görbéket látnánk a dinamikai mérések során.
Legszívesebben kidobnám a gépemet,[#rinya] de sajnos van még pár sürgős munkám rá...
Mindezektől függetlenül, érdekes dolgokat tudtunk meg a léptetők lelkivilágáról, de a "laborCNC"-zést hagyom másnak, inkább hajtom a motorokat, csinálják tovább amire eddig is képesek voltak, és nem morgok, ha 2 századdal nagyobb lett pl. a kulcskolonc hossza.
Mégpedig, hogy akármit csinálunk, a stepper motor csak úgy képes lépkedni, mintha reszelőn húzkodott dróttal adnánk neki a step jeleket. Pozíciót téveszt, lépést veszít stb. Igaz nem mindegy, hogy simító reszelőt, kettős simítót, vagy káposzta reszelőt használunk, de ezt sajnos sosem tudjuk meg.
Abba már bele sem merek gondolni, hogy egy vezérlőre visszacsatolt enkóderes steppermotor hogyan rángana a korrekciók miatt, milyen randa görbéket látnánk a dinamikai mérések során.
Legszívesebben kidobnám a gépemet,[#rinya] de sajnos van még pár sürgős munkám rá...
Mindezektől függetlenül, érdekes dolgokat tudtunk meg a léptetők lelkivilágáról, de a "laborCNC"-zést hagyom másnak, inkább hajtom a motorokat, csinálják tovább amire eddig is képesek voltak, és nem morgok, ha 2 századdal nagyobb lett pl. a kulcskolonc hossza.
Cím: Re:Léptetőmotor
Írta: fn47xk7ei Dátum 2017 szeptember 01, 22:21
Írta: fn47xk7ei Dátum 2017 szeptember 01, 22:21
Ok . [#eljen]Én is gyorsan befejezem .Uff.[#awink]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 02, 07:20
Írta: 000000000 Dátum 2017 szeptember 02, 07:20
A tachó jel NEM pozíció jel, így ideje lenne belátnod ezt a hatalmas szakmai tévedésedet is. Ezért aztán felőlem egy 5 milliós szkóppal is nézegetheted a tachódat.
"A tachos szkópos eszközzel neked mikroszekundumra megmondom mennyi a lépés jel"
Micsoda???? [#nevetes1]
Eleve a DC tachóban súrlódó kefék vannak, amik bizony még a legjobbaknál se mindig érinkeznek (zaj keletkezik). Ezt még tovább rontja a kommutátor konstrukcióból adódó ugynevezett ripple jelenség, ami miatt mindig csak egy hullámos görbéről beszélünk önmagában is alacsony fordulatoknál, Aztán elve 1 % körüli csak a linearitása, had ne soroljam.
Szóval nonszensz az egész, amolyan Pál féle mesevilág.
"A tachos szkópos eszközzel neked mikroszekundumra megmondom mennyi a lépés jel"
Micsoda???? [#nevetes1]
Eleve a DC tachóban súrlódó kefék vannak, amik bizony még a legjobbaknál se mindig érinkeznek (zaj keletkezik). Ezt még tovább rontja a kommutátor konstrukcióból adódó ugynevezett ripple jelenség, ami miatt mindig csak egy hullámos görbéről beszélünk önmagában is alacsony fordulatoknál, Aztán elve 1 % körüli csak a linearitása, had ne soroljam.
Szóval nonszensz az egész, amolyan Pál féle mesevilág.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 02, 07:26
Írta: 000000000 Dátum 2017 szeptember 02, 07:26
Köszönöm, hogy tanulságos és érdekes dolgokat találtál ezen léptető motor mérések kapcsán. Örülök, hogy Te teszel is azért, hogy a lehetőségek határán belül egy kis odafigyeléssel, tesztelgetéssel, korrekcióval, az elméleti alapok mentén egyre jobb minőségű legyen a hajtásod.[#eljen]
Cím: Re:Léptetőmotor
Írta: MoparMan Dátum 2017 szeptember 02, 10:34
Írta: MoparMan Dátum 2017 szeptember 02, 10:34
(http://kreszklub.hu/images/blog/011_allj_elsobbsegadas_kotelezo.jpg)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 02, 11:37
Írta: 000000000 Dátum 2017 szeptember 02, 11:37
Volna egy szakmai kérdésem, egy hibrid léptetőmotor ha tartósan tartóáram alatt van akkor az kárósítja, pl lemágneseződhet vagy bármi baja lehet? Értem itt napok hetk vagy több időintervallumot.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2017 szeptember 02, 12:32
Írta: Szalai György Dátum 2017 szeptember 02, 12:32
Ennyire statikus üzemnél szerintem a melegedés fog határt szabni.
Annyi hőt termelhet a tartóáram, hogy a motor hőmérséklete üzemszerű értéken stabilizálódjon.
Így a motor nem károsodik, de felette meg igen.
Kicsi tartóárammal örökkévalóságig működhet, naggyal meg elfüstöl.
Annyi hőt termelhet a tartóáram, hogy a motor hőmérséklete üzemszerű értéken stabilizálódjon.
Így a motor nem károsodik, de felette meg igen.
Kicsi tartóárammal örökkévalóságig működhet, naggyal meg elfüstöl.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 02, 13:06
Írta: 000000000 Dátum 2017 szeptember 02, 13:06
Kevés adatot közöltél. Nem ismerjük, pl. hogy miyen a motor step/fordulat beállítása a vezérlőn, valamint motorméret, és a tartóáram sem ismert.
A helyzetet tovább bonyolítja, hogy microstep esetén egy kétfázisú léptetőmotornál a sin(x)+cos(x) függvény kapcsán az áram minimum 1 és gyök2/2-szeres áram értékei alakulhatnak ki a megállítási pozíciótól függően. Így az P=I*I*R hőveszteségi képlet alapján ez a szorzótényező már 1 és 2-re növekszik!
Azaz akkor lehetsz nyugodt, ha szándékosan azokban a motor pozíciókban teszteled, ahol az említett függvénynek a maximum szélső érték pontja van. A teszt során pedig ekkor olyan hőegyensúlyra kell törekedned, hogy a motor a kellő biztonság érdekében 50-60 C fok fölé soha ne tudjon melegedni, még a tűző napon sem, ha egyáltalán érheti napsugárzás (ezt se tudjuk ugyebár...).
Ezekkel szerettem volna kiegészteni György magyarázatát, és akkor ha ezeket a fő méretezési, tesztelési elveket betartod, valóban az "örökkévalóságig" jó marad a motor.:)
A helyzetet tovább bonyolítja, hogy microstep esetén egy kétfázisú léptetőmotornál a sin(x)+cos(x) függvény kapcsán az áram minimum 1 és gyök2/2-szeres áram értékei alakulhatnak ki a megállítási pozíciótól függően. Így az P=I*I*R hőveszteségi képlet alapján ez a szorzótényező már 1 és 2-re növekszik!
Azaz akkor lehetsz nyugodt, ha szándékosan azokban a motor pozíciókban teszteled, ahol az említett függvénynek a maximum szélső érték pontja van. A teszt során pedig ekkor olyan hőegyensúlyra kell törekedned, hogy a motor a kellő biztonság érdekében 50-60 C fok fölé soha ne tudjon melegedni, még a tűző napon sem, ha egyáltalán érheti napsugárzás (ezt se tudjuk ugyebár...).
Ezekkel szerettem volna kiegészteni György magyarázatát, és akkor ha ezeket a fő méretezési, tesztelési elveket betartod, valóban az "örökkévalóságig" jó marad a motor.:)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 02, 13:12
Írta: 000000000 Dátum 2017 szeptember 02, 13:12
A fene ebbe a vacak billentyűzetbe, meg a sietségembe!
A mondat helyesen:
Így az P=I*I*R hőveszteségi képlet alapján ez a szorzótényező már 1.414-ről 2-re növekszik!
A mondat helyesen:
Így az P=I*I*R hőveszteségi képlet alapján ez a szorzótényező már 1.414-ről 2-re növekszik!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 02, 13:52
Írta: 000000000 Dátum 2017 szeptember 02, 13:52
Azt értem, hogy a túl nagy tartóáram túl nagy hőt termel, pontosan arra lennénk kíváncsi, hogy a rotor ugye állandó mágnesű ez gyengülhet e vagy károsítható e?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 02, 14:00
Írta: 000000000 Dátum 2017 szeptember 02, 14:00
Beállításokra visszatérve, tesztelgetem a különféle beállításokat nehéz közép utat találni, hogy alacsony előtolásnál is kielégítő legyen illetve nagy előtolási értéknél is megfelelő legyen.
Rezonancia öngerjedése nehéz ügy, és ezt javítani lehessen tényleg szőrszál hasogatónak kell lenni.
Rezonancia öngerjedése nehéz ügy, és ezt javítani lehessen tényleg szőrszál hasogatónak kell lenni.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2017 szeptember 02, 18:35
Írta: Szalai György Dátum 2017 szeptember 02, 18:35
Minden mágnesnek van az anyagától függő megengedett max. hőmérséklete. Ez természetesen mindég sokkal magasabb érték, mint a motorra megengedett max. hőmérséklet.
Olcsó háztartási készülékbe szánt motor mágnese lehet csak kicsit több mint 100C fok, drága ipari motornál meg 300 fölött is lehet.
Tehát amíg a kezed nem ég rá, addig nincs baja a mágnesnek.
De a tartóáramú üzemben nem is a mágnesben keletkezik a meleg, hanem azt csak átvezetik rá a tekercsből a fém alkatrészek. A meleg a tekercsben keletkezik, ezért rézveszteség a neve.
Tehát a legmelegebb pont valahol a tekercs belső meneteiben lesz.
Következő kérdés, hogy mekkora hőmérséklettől károsodik a tekercs.
A réz olvadáspontja magas, az bírja, míg nem lesz baja a szigetelésének.
A szigetelés hő tűrését a gyártó osztályba sorolással, húszezer órára adja meg. Elég általános lett az F osztályú szigetelés, ami 155 C fokot jelent, de a leggyengébb Y osztály is 90 C fok.
Ez is sokkal tovább bírja, mint a kezed.
Mi van még? Hát sajnos kapcsolóüzemű motorvezérlő esetén, tartóáramnál is van vasveszteség.
Mert nem tiszta stabil egyenáram, hanem változó értékű, az meg mágneses térerő változást okoz a vasban, vagyis hiszterézis veszteséget eredményez.
Olcsó háztartási készülékbe szánt motor mágnese lehet csak kicsit több mint 100C fok, drága ipari motornál meg 300 fölött is lehet.
Tehát amíg a kezed nem ég rá, addig nincs baja a mágnesnek.
De a tartóáramú üzemben nem is a mágnesben keletkezik a meleg, hanem azt csak átvezetik rá a tekercsből a fém alkatrészek. A meleg a tekercsben keletkezik, ezért rézveszteség a neve.
Tehát a legmelegebb pont valahol a tekercs belső meneteiben lesz.
Következő kérdés, hogy mekkora hőmérséklettől károsodik a tekercs.
A réz olvadáspontja magas, az bírja, míg nem lesz baja a szigetelésének.
A szigetelés hő tűrését a gyártó osztályba sorolással, húszezer órára adja meg. Elég általános lett az F osztályú szigetelés, ami 155 C fokot jelent, de a leggyengébb Y osztály is 90 C fok.
Ez is sokkal tovább bírja, mint a kezed.
Mi van még? Hát sajnos kapcsolóüzemű motorvezérlő esetén, tartóáramnál is van vasveszteség.
Mert nem tiszta stabil egyenáram, hanem változó értékű, az meg mágneses térerő változást okoz a vasban, vagyis hiszterézis veszteséget eredményez.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 02, 19:29
Írta: 000000000 Dátum 2017 szeptember 02, 19:29
A Robsy motor dinamikai mérőrendszerrel amikor bemértünk egy léptetőmotor/meghajtó párost, annak ereménye egy fájlba elmenthető. Így utólag egy értékelő, nézegető programmal tetszés szerint ezeket behívhatjuk, összehasonlíthatjuk, melyik motor, melyik vezérlő, melyik peremfeltétel a nyerő a legjobb pozíciótartás tekintetében. Egy koordinátarenszerben akár 3-4 adatbázis betehető, egymásra vetíthetők a pozíció jelleggörbék, így máris minden elválik objektív módon, erre mutat példát az alábbi eset:
(http://www.robsy.hu/te2/robsy-motor-measure79vs39.gif)
Szerintem elég érdekes, tanulságos ez az eredmény, hiszen direkt két olyan meghajtót választottam, ami a Fórumon elég gyakori.
(http://www.robsy.hu/te2/robsy-motor-measure79vs39.gif)
Szerintem elég érdekes, tanulságos ez az eredmény, hiszen direkt két olyan meghajtót választottam, ami a Fórumon elég gyakori.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 03, 11:44
Írta: 000000000 Dátum 2017 szeptember 03, 11:44
Köszönöm, kimerítő válasz volt.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 03, 12:05
Írta: 000000000 Dátum 2017 szeptember 03, 12:05
Elfogadnánk egy ilyen mérőeszközt tény, hogy tiszta képet kap az ember az adott helyzetről.
Robsy volna egy szakmai kérdésem ami szerintem számodra testreálló vérbeli gépészmérnökét gondolkozol.
Rengeteg beállítási variációval próbálkoztam, és úgytünik h szinte akármilyen fordulatra lehet hangolni a rendszert ahol simán fut, egész extra előtolást is sikerült elérnem sima futással de akkor az alacsony tartomány borzasztó.
Lehetséges létrehozni egy olyan kiegyensúlyozó rendszert ami a perpillanat rezonanciát aktívan hangolja el.
Gondolok pl. olyasmire mint a dinamikus kiegyensúlyozás számításakor, vibráció méréssel és próba tömeg alkalmazásával, egy egyszerű számítás gyakorlatilag.
Olyan gyakorlati megoldásra gondolok mint pl a golyósorsón elhelyezett három elhelyezett x tömeg aminek az egymáshoz viszonyított szöghelyzetét egy mikrokontroller változtatja a rezonanciát figyelve.
Elméletben működőkepés lenne?
Robsy volna egy szakmai kérdésem ami szerintem számodra testreálló vérbeli gépészmérnökét gondolkozol.
Rengeteg beállítási variációval próbálkoztam, és úgytünik h szinte akármilyen fordulatra lehet hangolni a rendszert ahol simán fut, egész extra előtolást is sikerült elérnem sima futással de akkor az alacsony tartomány borzasztó.
Lehetséges létrehozni egy olyan kiegyensúlyozó rendszert ami a perpillanat rezonanciát aktívan hangolja el.
Gondolok pl. olyasmire mint a dinamikus kiegyensúlyozás számításakor, vibráció méréssel és próba tömeg alkalmazásával, egy egyszerű számítás gyakorlatilag.
Olyan gyakorlati megoldásra gondolok mint pl a golyósorsón elhelyezett három elhelyezett x tömeg aminek az egymáshoz viszonyított szöghelyzetét egy mikrokontroller változtatja a rezonanciát figyelve.
Elméletben működőkepés lenne?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 03, 13:45
Írta: 000000000 Dátum 2017 szeptember 03, 13:45
A 2 fázisú léptető motor a leghitványabb a rezonacia tekintetében, a 3 vagy 5 fázisúk sokkal jobbak.
Szerintem a gépednél ott a bibi, hogy gyorsító áttételt alkalmazol, és a böhöm golyósorsó átmérőd kapcsán a negyedik hatvány tesszi a dolgát, így sok fölösleges J-t érez a motorod.
Az orsódat nyilvánvalóan csak nagy konstrukciós változtatással, és sok pénzért tudnád lecserélni. Viszont azt a gyorsító áttételt szedd ki, próbáld meg 1:1-ben vagy 1:1.2-1.5 lassítással.
Majd lefuttatok egy hajtásméretezést is az esetedre, ha több időm lesz, az pontosan megmondja, mekkora áttételnél van a hajtásoptimumod, ahol a CNC gép gyorsulási képessége a legnagyobb.
Az ilyen mechanikus kiegyensúlyozó szerkezetkben nem hiszek, csak fölösleges újabb J-ket termelnek. Az áttétel optimum a legfontosabb, meg persze az, hogy pár különböző képességű vezérlővel is teszteljed a motorodat, mert gondolom motort se akarsz jobbra cserélni.
Szerintem a gépednél ott a bibi, hogy gyorsító áttételt alkalmazol, és a böhöm golyósorsó átmérőd kapcsán a negyedik hatvány tesszi a dolgát, így sok fölösleges J-t érez a motorod.
Az orsódat nyilvánvalóan csak nagy konstrukciós változtatással, és sok pénzért tudnád lecserélni. Viszont azt a gyorsító áttételt szedd ki, próbáld meg 1:1-ben vagy 1:1.2-1.5 lassítással.
Majd lefuttatok egy hajtásméretezést is az esetedre, ha több időm lesz, az pontosan megmondja, mekkora áttételnél van a hajtásoptimumod, ahol a CNC gép gyorsulási képessége a legnagyobb.
Az ilyen mechanikus kiegyensúlyozó szerkezetkben nem hiszek, csak fölösleges újabb J-ket termelnek. Az áttétel optimum a legfontosabb, meg persze az, hogy pár különböző képességű vezérlővel is teszteljed a motorodat, mert gondolom motort se akarsz jobbra cserélni.
Cím: Re:Léptetőmotor
Írta: GPeti1977 Dátum 2017 szeptember 05, 05:32
Írta: GPeti1977 Dátum 2017 szeptember 05, 05:32
Lépés simító (https://m.aliexpress.com/s/item/32776922807.html?trace=storeDetail2msiteDetail#autostay)
Cím: Re:Léptetőmotor
Írta: GPeti1977 Dátum 2017 szeptember 05, 05:47
Írta: GPeti1977 Dátum 2017 szeptember 05, 05:47
Miért jó. (http://www.engineerination.com/2015/02/drv8825-missing-steps.html?m=1)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 05, 12:46
Írta: 000000000 Dátum 2017 szeptember 05, 12:46
Kipróbáltam ezt a módszert ennél a meghajtónál, a mérőrendszerem alig mutatott ki pozíció javulást a rezonancia frekvenciáknál.
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2017 szeptember 05, 13:23
Írta: zozo Dátum 2017 szeptember 05, 13:23
Méréseid szerint van egy általános megbízható tartomány?
-ami különböző mikrolépésekhez ajánlott max. rpm-et tartalmaz.
Vagy számítható a mikrolépés és meghajtó freki ismeretében a rezonancia frekvencia?
-ami különböző mikrolépésekhez ajánlott max. rpm-et tartalmaz.
Vagy számítható a mikrolépés és meghajtó freki ismeretében a rezonancia frekvencia?
Cím: Re:Léptetőmotor
Írta: GPeti1977 Dátum 2017 szeptember 05, 13:54
Írta: GPeti1977 Dátum 2017 szeptember 05, 13:54
4 dióda csodát nem okoz.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 05, 14:56
Írta: 000000000 Dátum 2017 szeptember 05, 14:56
0-5 1/s fordulatszám tartományban szinte minden léptetőmotornál jelenetkezik a rezonancia. Utána lecsendesülnek, de sajnos a nyomatékuk is egyre kevesebb már ekkor. A motor saját J-je és a mágneses térerő rendszere, időállandói határozzák meg ezt elsőrorban, megközelítően egész jól számolhatók is, ha kellőszámú, és pontos gyári adat van a motorról.
A méréseknek két fő csoportja van:
1. Üresjárati mérések.
2. Terheléses mérések.
Terhelés hatására a rezonancia jelenség alaposan módosulhat.
Hogy aztán ez hogy alakul, mennyire tolódik el, az már a motorhajtás képességeitől, beállításától, és a hajtott rendszer paramétereitől függ nagymértékben.
Az eddig közölt ábráim, mérési eredményeim mindegyike üresjárati mérések voltak, terhelés hatására a pozíció hibák is még nagyobbá válnak, majd lépésvesztéssel szétesik a szinkron.
A méréseknek két fő csoportja van:
1. Üresjárati mérések.
2. Terheléses mérések.
Terhelés hatására a rezonancia jelenség alaposan módosulhat.
Hogy aztán ez hogy alakul, mennyire tolódik el, az már a motorhajtás képességeitől, beállításától, és a hajtott rendszer paramétereitől függ nagymértékben.
Az eddig közölt ábráim, mérési eredményeim mindegyike üresjárati mérések voltak, terhelés hatására a pozíció hibák is még nagyobbá válnak, majd lépésvesztéssel szétesik a szinkron.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 05, 19:28
Írta: 000000000 Dátum 2017 szeptember 05, 19:28
Mi a véleményetek egy jól megszerkesztett Damper-ről?
rengetegféle megoldást látni ,néhány közülük
Mi ezeknek a működési elve?
rengetegféle megoldást látni ,néhány közülük
Mi ezeknek a működési elve?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 05, 19:33
Írta: 000000000 Dátum 2017 szeptember 05, 19:33
damper (https://solsylva.com/cnc/dampers.shtml) Vexta (https://www.cloudynights.com/topic/129962-stepper-damper-an-interesting-find/) Rotary damper / visco-elasticRotary damper (http://www.directindustry.com/prod/phytron-gmbh/product-7098-464406.html)
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2017 szeptember 05, 19:51
Írta: Szalai György Dátum 2017 szeptember 05, 19:51
Megbízható csillapítást ígér, a sebesség és a pontosság csökkenése nélkül!
De az elméleti szerszámpálya minél pontosabb gyakorlati lekövetéséhez dinamikából kéne a lehető legtöbb.
Azt nem ígéri.
Szerintem, ha az alkalmazás szempontjából van feleslegesen sok dinamikai képesség a rendszerben, akkor hasznos lehet a rezgéscsillapító.
Vagy, ha eleve betervezték a dinamikai méretezés során.
De ez csak egy vélemény. Lássuk a többit.
De az elméleti szerszámpálya minél pontosabb gyakorlati lekövetéséhez dinamikából kéne a lehető legtöbb.
Azt nem ígéri.
Szerintem, ha az alkalmazás szempontjából van feleslegesen sok dinamikai képesség a rendszerben, akkor hasznos lehet a rezgéscsillapító.
Vagy, ha eleve betervezték a dinamikai méretezés során.
De ez csak egy vélemény. Lássuk a többit.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 05, 20:04
Írta: 000000000 Dátum 2017 szeptember 05, 20:04
Hunka Tibor a megmondhatója mikor beüzemeltem nála egy ATT-s gépe milyen hangja van egy rezonáló léptetőmotornak !
A felesége lejött az emeletről a hangzavarra.
Pedig mikrolépésben megy és Pacific Scientific vezérlőkről van szó !
Tehát nem minden a dinamika !
A felesége lejött az emeletről a hangzavarra.
Pedig mikrolépésben megy és Pacific Scientific vezérlőkről van szó !
Tehát nem minden a dinamika !
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2017 szeptember 07, 09:32
Írta: ht0cjk58i Dátum 2017 szeptember 07, 09:32
Üdv Urak!
Találkozott már valaki olyan hibával illetve jelenséggel, hogy
a léptecs nagyon melegszik de a motor áramot el se éri.
A léptecs Vextra 0.9' DC 5.5V 1,34A, a végfok HY-DIV268N-5A, a mikrolépés:1/8 a beállított áram 0,6A. Mindez 1-1 hajt egy 2mm trapézorsót és igy max 300-as előtolást tudok ki hozni motor tuningnál.
Találkozott már valaki olyan hibával illetve jelenséggel, hogy
a léptecs nagyon melegszik de a motor áramot el se éri.
A léptecs Vextra 0.9' DC 5.5V 1,34A, a végfok HY-DIV268N-5A, a mikrolépés:1/8 a beállított áram 0,6A. Mindez 1-1 hajt egy 2mm trapézorsót és igy max 300-as előtolást tudok ki hozni motor tuningnál.
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2017 szeptember 07, 09:32
Írta: ht0cjk58i Dátum 2017 szeptember 07, 09:32
Ja 24Vról hajtva.
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2017 szeptember 07, 09:39
Írta: Motoros Dátum 2017 szeptember 07, 09:39
Régifajta motor, talán még az unipoláris világból---nem illeszkedik a mostani vezérlődhöz.
Keress hozzávaló vezérlőt...nem egyszerű...., vagy cserélj motort.
Keress hozzávaló vezérlőt...nem egyszerű...., vagy cserélj motort.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 07, 09:46
Írta: 000000000 Dátum 2017 szeptember 07, 09:46
Azok a vezérlők csoda, hogy még működnek !
Nekem 24 voltról az originál csomagból kivéve élt 2 percet !
És az áram is le volt véve 1.8 Amperre.
Normális megbízható vezérlőt akarsz akkor csak Leadshine veszel !
Jóval drágább, de ahogy szokták itt mondani, tisztább szárazabb érzés.
Nekem 24 voltról az originál csomagból kivéve élt 2 percet !
És az áram is le volt véve 1.8 Amperre.
Normális megbízható vezérlőt akarsz akkor csak Leadshine veszel !
Jóval drágább, de ahogy szokták itt mondani, tisztább szárazabb érzés.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 07, 09:49
Írta: 000000000 Dátum 2017 szeptember 07, 09:49
A 2mm-es trapézorsó direkt hajtása is rossz esetedben, messze vagy a hajtásdinamikai optimumtól. Így az N objektív tényező megpecsételte a sorsodat, ennyi hiba kapcsán örülj, hogy ennyit is tud az a szerencsétlen hajtásod.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 07, 09:51
Írta: 000000000 Dátum 2017 szeptember 07, 09:51
Vexta motorok nem rosszak, sőt !
És általában 99%-ban 4 vagy 8 kivezetésesek a 2 fázisú darabjaik !
Az a kinai százhuszonhatszor egymásról rosszul koppintott vezérlő ennyit tud, de azt stabilan !
És általában 99%-ban 4 vagy 8 kivezetésesek a 2 fázisú darabjaik !
Az a kinai százhuszonhatszor egymásról rosszul koppintott vezérlő ennyit tud, de azt stabilan !
Cím: Re:Léptetőmotor
Írta: ht0cjk58i Dátum 2017 szeptember 07, 10:23
Írta: ht0cjk58i Dátum 2017 szeptember 07, 10:23
Köszi urak, veszek uj mocikat és azzal majd jó lesz. :)
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2017 szeptember 07, 11:28
Írta: Motoros Dátum 2017 szeptember 07, 11:28
a 4 vagy 8 az igen, de szerintem ez egy régi, és csak 6 a kivezetés. A Te általad épített vezérlőnek is az vvolt a baja, hogy nem jó motorokat raktak hozzá és mire végzett addigra a rántotta is készen volt.
Pontosabban a vezérlőd teljesen OK csak a "talált" motorok nem passzoltak.
De ez magántéma.
Még valami: szrintem a TB6560 IC az teljesen korrekt, csak a kapcsolások amiket hozzá berheltek mindenféle hozzá nem értők, és a nem illesztett motorok járatták le. Más a koppintott ál IC de én olyannal nem találkoztam.
Pontosabban a vezérlőd teljesen OK csak a "talált" motorok nem passzoltak.
De ez magántéma.
Még valami: szrintem a TB6560 IC az teljesen korrekt, csak a kapcsolások amiket hozzá berheltek mindenféle hozzá nem értők, és a nem illesztett motorok járatták le. Más a koppintott ál IC de én olyannal nem találkoztam.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2017 szeptember 07, 12:31
Írta: s7manbs8 Dátum 2017 szeptember 07, 12:31
Nem is lehet mindig a vezérlőre fogni, vagy valami hülye hiba miatt is lehet hogy elszáll, rossz forrasztás, az alja hozzáér a fémhézhoz meg iylen hülyeségek miatt pl.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 07, 13:07
Írta: 000000000 Dátum 2017 szeptember 07, 13:07
Csak mellesleg mennyi Leadshine vezérlőt hallottál ami tönkrement használat közben ?
És mennyi volt ezekből a TB all in one vackokból ?
Konkrétan eddig csak a közelemben: Leadshine 0 TB xxxx 13 darab !
Azért ez konkrétan elég rossz arány !
És a másik, a 6 vezetékes motor meddig is tart átkötni 8 vezetékesre ?
Ha akkor szedek elő hozzá mindent akkor is 10-15 perc !
A harmadik , csak nekem tűnik viccesnek, mókásnak, bolondosnak, egy univerzálisnak árult TB vezérlőre nem mindegy milyen motort köt az ember mert különben tönkremegy ?
A Leadshine miért nem megy tönkre ?
És mennyi volt ezekből a TB all in one vackokból ?
Konkrétan eddig csak a közelemben: Leadshine 0 TB xxxx 13 darab !
Azért ez konkrétan elég rossz arány !
És a másik, a 6 vezetékes motor meddig is tart átkötni 8 vezetékesre ?
Ha akkor szedek elő hozzá mindent akkor is 10-15 perc !
A harmadik , csak nekem tűnik viccesnek, mókásnak, bolondosnak, egy univerzálisnak árult TB vezérlőre nem mindegy milyen motort köt az ember mert különben tönkremegy ?
A Leadshine miért nem megy tönkre ?
Cím: Re:Léptetőmotor
Írta: svager Dátum 2017 szeptember 07, 13:31
Írta: svager Dátum 2017 szeptember 07, 13:31
Én már hallottam,nekem az 5-ből 1 ment tönkre,igaz az talán 20 percet ha ment.
Visszavittem a klaviós srácok három hónapig nézegették és visszaadták,hogy nem tudják mi baja.[#sniffles]
Visszavittem a klaviós srácok három hónapig nézegették és visszaadták,hogy nem tudják mi baja.[#sniffles]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 07, 13:38
Írta: 000000000 Dátum 2017 szeptember 07, 13:38
Ha azokat a csőpalást hegesztőket is számolom amiknek a vezérlését építettem akkor 28 darab Leadshine vezérlő ment át a kezeimen.
Még eddig egy sem jött vissza üzem közbeni meghibásodással.
Viszont a Klaviónál sem hülyék vannak, nem véletlen kaptad vissza úgy ahogy !
Még eddig egy sem jött vissza üzem közbeni meghibásodással.
Viszont a Klaviónál sem hülyék vannak, nem véletlen kaptad vissza úgy ahogy !
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 07, 13:50
Írta: 000000000 Dátum 2017 szeptember 07, 13:50
Sokaknak építettem már vezérlőt is.
Volt aki először Leadshine M vezérlővel kezdte aztán nem tetszett neki a rezonancia és az elérhető sebesség aztán váltott AM verzióra.
Most is váltani akar mert a tápok 400 voltosak és adott helyen nincs ilyen és nem is akar táppal baszakodni többet!
Aztán most az AC 230 voltos betáplálású Leadshine-ra esett a választás.
Tehát csak nála ez a csere után 12 vezérlő lesz a működőképes állás.
Volt aki először Leadshine M vezérlővel kezdte aztán nem tetszett neki a rezonancia és az elérhető sebesség aztán váltott AM verzióra.
Most is váltani akar mert a tápok 400 voltosak és adott helyen nincs ilyen és nem is akar táppal baszakodni többet!
Aztán most az AC 230 voltos betáplálású Leadshine-ra esett a választás.
Tehát csak nála ez a csere után 12 vezérlő lesz a működőképes állás.
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2017 szeptember 07, 15:05
Írta: Motoros Dátum 2017 szeptember 07, 15:05
Nem hiszem, hogy a japánok szériába gyártanak olyat ami nem korrekt. Ez a TB ic eredetileg valami "gyári" nyomtatóba, vagy akármibe készült, és ott tette a dolgát a megfelelő áramköri környezetbe ültetve. Ha hibás lett volna akkor az kiderül és leállnak vele.
Aztán a hobbysták felfedezték, hozzámókoltak valamit, és lett belőle ami lett.
Van itt a fórumon valaki aki sajnos nagyon ritkán irogat.
Megoldotta ezt a bizonyos elfüstölős gondot, de közbe bejöttek a kínai kékek rosszé hugyé, és nem volt értelme a témával foglalkozni, azaz gyártani. Majd hozzászól ha gondolja, de szerintem nem fog belebonyolódni értelmetlen vitákba.
Aztán a hobbysták felfedezték, hozzámókoltak valamit, és lett belőle ami lett.
Van itt a fórumon valaki aki sajnos nagyon ritkán irogat.
Megoldotta ezt a bizonyos elfüstölős gondot, de közbe bejöttek a kínai kékek rosszé hugyé, és nem volt értelme a témával foglalkozni, azaz gyártani. Majd hozzászól ha gondolja, de szerintem nem fog belebonyolódni értelmetlen vitákba.
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2017 szeptember 07, 15:14
Írta: Motoros Dátum 2017 szeptember 07, 15:14
Ismerem az AM882-t olyan mintha szervomotorok lennének a sima kétfázisú léptecsek helyén. Az elöregedett Emco eszterga 5 fázisú motorjai + vezérlője lett generálozva. Jobb lett mint volt.
Cím: Re:Léptetőmotor
Írta: s2k5ycubj Dátum 2017 szeptember 11, 15:54
Írta: s2k5ycubj Dátum 2017 szeptember 11, 15:54
Én írtam le régebben a tapasztalatokat és egy lehetséges megoldást. A bipoláris léptető topikban van,vissza kell keresni. Simán 8 gyors dióda és korrekt LOW ESR kondi a bemenetre és tökéletesen működik! Ja ez a TB6600 széria. Nem rossz ic,de sajnos könnyen meghal. Elég elolvasni és értelmezni a gyári adatlapját.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 15, 19:15
Írta: 000000000 Dátum 2017 szeptember 15, 19:15
A rezonanciához és lépésvesztéshez, sokat kínlódtam vele mostanság és hol jelentkezett hol nem, hol rezonált hol nem, végig játszottam sok mindent és a végén kiderült, hogy a kínai golyósorsó rosszul lett gyárilag összeszerelve.
Egy golyóval több lett beletéve így ha ugy jött ki abnormálisan viselkedett normálisan egy golyónyi hézaggal van összeszerelve.
Ha esetleg valaki is hasonló jelenségeket tapasztalt szedje szét és ellenőrizze mert kézzel forgatva semmit nem érezni.
Egy golyóval több lett beletéve így ha ugy jött ki abnormálisan viselkedett normálisan egy golyónyi hézaggal van összeszerelve.
Ha esetleg valaki is hasonló jelenségeket tapasztalt szedje szét és ellenőrizze mert kézzel forgatva semmit nem érezni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 17, 08:12
Írta: 000000000 Dátum 2017 szeptember 17, 08:12
Bemutatok egy újabb esetet, ahol egy motorhajtás Robsy motordinamikai mérési eredményei elég siralmasak, és ennek kapcsán bekövetkezik a lépésvesztés. Innentől kezdve pedig jól látható, hogy a motor valós pozíció végleg leszakad az alapjeltől, maradó hiba kapcsán már soha nem lesz azzal azonos.
(http://www.robsy.hu/te2/robsy-motor-measure-e3.gif)
(http://www.robsy.hu/te2/robsy-motor-measure-e3.gif)
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2017 szeptember 17, 10:18
Írta: zozo Dátum 2017 szeptember 17, 10:18
Már visszafelé is lépked?
80 step 18 fok tengely fordulat lenne, a grafikon szerint meg lépett vagy 13 fokot.
Nem értem. Ez így nagyon durva, ezt hogyan erőltetted rá?
80 step 18 fok tengely fordulat lenne, a grafikon szerint meg lépett vagy 13 fokot.
Nem értem. Ez így nagyon durva, ezt hogyan erőltetted rá?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 17, 10:52
Írta: 000000000 Dátum 2017 szeptember 17, 10:52
"Már visszafelé is lépked?"
Persze, hiszen ha belegondolsz a szinkron mágneses forgótér szögpozíciójába és a valóságos, lemaradt motor pozícióba, akkor sajnos van az a fázishelyzet, amikor a motor visszafelé forog gőzerővel. Ez a "megdöbbentő" jelenség figyelhető meg a mérési görbénél is.
Egyébként semmit nem erőltettem rá, a motor tengelye üresjáratban volt a méréskor, és még így se tudta saját magát se normálisan forgatni ebben az esetben a kis DRV8825-el.
Képzeld el, ha még egy bögrés forgatót kapott volna a nyakába.:)
Amikor egy léptető motor maradó lépéseket téveszt, az eredőben soha nem egy lépés, hanem négy egész (vagy ennek is a többszöröse), azaz 7.2 fok innentől kezdve a hiba, ez remekül látszik a mérési eredményből is. Ilyen értelemben a lépésvesztés helytelen kifejezés, egy léptető motorhajtás egy lépést nem tud elveszíteni, csak a többszörösét.
Persze, hiszen ha belegondolsz a szinkron mágneses forgótér szögpozíciójába és a valóságos, lemaradt motor pozícióba, akkor sajnos van az a fázishelyzet, amikor a motor visszafelé forog gőzerővel. Ez a "megdöbbentő" jelenség figyelhető meg a mérési görbénél is.
Egyébként semmit nem erőltettem rá, a motor tengelye üresjáratban volt a méréskor, és még így se tudta saját magát se normálisan forgatni ebben az esetben a kis DRV8825-el.
Képzeld el, ha még egy bögrés forgatót kapott volna a nyakába.:)
Amikor egy léptető motor maradó lépéseket téveszt, az eredőben soha nem egy lépés, hanem négy egész (vagy ennek is a többszöröse), azaz 7.2 fok innentől kezdve a hiba, ez remekül látszik a mérési eredményből is. Ilyen értelemben a lépésvesztés helytelen kifejezés, egy léptető motorhajtás egy lépést nem tud elveszíteni, csak a többszörösét.
Cím: Re:Léptetőmotor
Írta: kaqkk007 Dátum 2017 szeptember 17, 11:54
Írta: kaqkk007 Dátum 2017 szeptember 17, 11:54
Ha ez igaz amit leírtál akkor abszolút nem üzemszerű mérés volt tehát szinte értelmetlen ... Üres tengellyel hogyan kényszerítetted ki a lépésvesztést ??
Cím: Re:Léptetőmotor
Írta: kaqkk007 Dátum 2017 szeptember 17, 11:57
Írta: kaqkk007 Dátum 2017 szeptember 17, 11:57
Ezt így csak túl alacsony motoráram beállításával lehet elkövetni ami egyáltalán nem életszerű...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 17, 12:03
Írta: 000000000 Dátum 2017 szeptember 17, 12:03
Gondolkozzál, azután nem fogsz szakmaiatlanságokat állítani.
Cím: Re:Léptetőmotor
Írta: kaqkk007 Dátum 2017 szeptember 17, 12:08
Írta: kaqkk007 Dátum 2017 szeptember 17, 12:08
Azért sem árulod el mi okozta a lépésvesztést ? Akkor abszolút értelmetlen a mérésed és nincs is értelme gondolkozni rajta hogy mi és hogyan került a grafikonra ...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 17, 12:11
Írta: 000000000 Dátum 2017 szeptember 17, 12:11
Kértelek valamire, azt tedd, és ne tetézd a hibáidat.
Cím: Re:Léptetőmotor
Írta: kaqkk007 Dátum 2017 szeptember 17, 14:40
Írta: kaqkk007 Dátum 2017 szeptember 17, 14:40
Én is kértek hogy mondd el miért vesztett lépést , de ha nem akkor nem , azt írták hogy te egy tanár vagy ha így tanítasz nem akarok tőled tanulni
Cím: Re:Léptetőmotor
Írta: Bencze András Dátum 2017 szeptember 17, 16:00
Írta: Bencze András Dátum 2017 szeptember 17, 16:00
Kérlek csináld meg ugyanezt teljes lépéssel is. Hab lenne a tortán összehasonlítani a különböző mikro-lépésekkel felvett diagramokat. Elsősorban 1/4 és 1/2-re gondolok.
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 szeptember 17, 17:06
Írta: 4ybj8h3c8 Dátum 2017 szeptember 17, 17:06
Ne küzdj vele, használható információt soha nem ad át.
Cím: Re:Léptetőmotor
Írta: kaqkk007 Dátum 2017 szeptember 17, 17:12
Írta: kaqkk007 Dátum 2017 szeptember 17, 17:12
Nem is érdekel tovább egyel több tiltása ,van ezentúl nem is látom mit ír ...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 17, 17:22
Írta: 000000000 Dátum 2017 szeptember 17, 17:22
"Kérlek csináld meg ugyanezt teljes lépéssel is."
De hiszen ez az volt, így gondolom ezt elírtad.
Megcsinálom majd a fél és negyed lépés mérési eredmény görbéit is, a mérési adatfájlok egy másik gépen vannak, így ma már ezt nem tudom megtenni. Az biztos, hogy sokat javul a rezonancia helyzet 1/2, 1/4, ... lépéseknél, és megszűnik ez a durva hiba, a lépésvesztés.
De hiszen ez az volt, így gondolom ezt elírtad.
Megcsinálom majd a fél és negyed lépés mérési eredmény görbéit is, a mérési adatfájlok egy másik gépen vannak, így ma már ezt nem tudom megtenni. Az biztos, hogy sokat javul a rezonancia helyzet 1/2, 1/4, ... lépéseknél, és megszűnik ez a durva hiba, a lépésvesztés.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 17, 17:28
Írta: 000000000 Dátum 2017 szeptember 17, 17:28
Ne hazudj, ne rombolj topikot, hiszen az 5456 bejegyzés diagramja már önmagában is a GONOLKODNI tudó kicsit is műszaki érdeklődésű ember számára rendkívül sok hasznos információt szolgáltat!
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 szeptember 17, 17:39
Írta: 4ybj8h3c8 Dátum 2017 szeptember 17, 17:39
Kezd megint visszatérni az okoskodó, felsőbbrendű stílusod. Engem nem zavar, téged vágnak ki, és amíg itt vagy addig is mulattató ahogy mindenkit lenézel.
Csak így tovább.
Csak így tovább.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2017 szeptember 17, 17:52
Írta: PSoft Dátum 2017 szeptember 17, 17:52
Kívülállónak kétség kívül mulattató, mint ahogy nekem is.
De aki érintett, annak nem biztos.:(
De aki érintett, annak nem biztos.:(
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2017 szeptember 17, 20:21
Írta: ANTAL GÁBOR Dátum 2017 szeptember 17, 20:21
"Kérlek csináld meg ugyanezt teljes lépéssel is."
"De hiszen ez az volt, így gondolom ezt elírtad."
Tibor ! az én szakmaiatlan (nyugodtan naívnak is nevezhető ) értelmezésem szerint az elérendő 9 fokos szögpozícióhoz a diagramon 40 lépés kiadása tartozik ( ezt látom) . Ha 200 lépéses a motor akkor 1 lépéshez 1.8 fok tartozik Akkor ez nem lehet teljes léptetés . Vagy az abszcisszán lévő számokat szorozzam 1/ 8 al de akkor mik azok a pöttyök ? ( nem számolom meg de saccra a 9 fokhoz 40 pötty van ábrázolva )
"De hiszen ez az volt, így gondolom ezt elírtad."
Tibor ! az én szakmaiatlan (nyugodtan naívnak is nevezhető ) értelmezésem szerint az elérendő 9 fokos szögpozícióhoz a diagramon 40 lépés kiadása tartozik ( ezt látom) . Ha 200 lépéses a motor akkor 1 lépéshez 1.8 fok tartozik Akkor ez nem lehet teljes léptetés . Vagy az abszcisszán lévő számokat szorozzam 1/ 8 al de akkor mik azok a pöttyök ? ( nem számolom meg de saccra a 9 fokhoz 40 pötty van ábrázolva )
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2017 szeptember 17, 20:36
Írta: ANTAL GÁBOR Dátum 2017 szeptember 17, 20:36
Mindjárt jön a dörgedelmes válasz ... Szóval valószínű szorozni kell ! Vagyis a 80 szorozva 1/ 8 az 10 step A pöttyök csak úgy ott vannak .... Ja és az hogy 1/8 az az ellenség ( vagyis jelen esetben én ) megtévesztése
Más kérdés hogy én még életemben léptettem 0.5 Nm es motort teljes léptetéssel egy fityfiritty vezérlővel.... Ja és a motorjaim teszik a dolgukat
Más kérdés hogy én még életemben léptettem 0.5 Nm es motort teljes léptetéssel egy fityfiritty vezérlővel.... Ja és a motorjaim teszik a dolgukat
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2017 szeptember 17, 20:38
Írta: ANTAL GÁBOR Dátum 2017 szeptember 17, 20:38
NEM léptettem !( kimaradt a nem )
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 18, 06:38
Írta: 000000000 Dátum 2017 szeptember 18, 06:38
"Ha 200 lépéses a motor akkor 1 lépéshez 1.8 fok tartozik Akkor ez nem lehet teljes léptetés."
Körülbelül két hete már értetlenkedtél, kötözködtél a mérési diagramjaimmal kapcsolatban, holott akkor is kiderült, minden adat rajta van, semmilyen megtévesztésről nincs szó. Akkor is, most is emlékeztetlek, hogy ha figyelmesen megnézed, van ott fent a második sorban egy adatközlés: "S : 200". Ez egyértelműen arra a peremfeltételre utal, hogy ez egy 200 step/fordulatra vonatkozó mérés volt.
Így megkérnélek, a jövőben ilyen hamis kijelentést ne tegyél, hogy "Akkor ez nem lehet teljes léptetés."
Körülbelül két hete már értetlenkedtél, kötözködtél a mérési diagramjaimmal kapcsolatban, holott akkor is kiderült, minden adat rajta van, semmilyen megtévesztésről nincs szó. Akkor is, most is emlékeztetlek, hogy ha figyelmesen megnézed, van ott fent a második sorban egy adatközlés: "S : 200". Ez egyértelműen arra a peremfeltételre utal, hogy ez egy 200 step/fordulatra vonatkozó mérés volt.
Így megkérnélek, a jövőben ilyen hamis kijelentést ne tegyél, hogy "Akkor ez nem lehet teljes léptetés."
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 18, 07:01
Írta: 000000000 Dátum 2017 szeptember 18, 07:01
"Más kérdés hogy én még életemben léptettem 0.5 Nm es motort teljes léptetéssel egy fityfiritty vezérlővel...."
Ez valóban más kérdés, ez a te magánügyed, aminek semmi köze az én mérésemhez.
Mellesleg egy léptető motornak üzemszerű használata az egész lépéses felbontás, és bizonyos alkalmazásoknál az előnyei miatt csak ez a jó megoldás. Így ennek a bemérése alapkövetelmény egy mérőrendszernél.
"Ja és a motorjaim teszik a dolgukat"
Semmi komoly bemérésen gondolom nem esett át a motorhajtásod, amiből a valós pozíciókövetési hibáját tudnád. Így csak abban lehetsz biztos, hogy az aktuális ideális, elméleti szögponthoz képest +- 3.6 fokon belül valahol mindig kóvályog a szerencsétlen léptetőmotorod. Ha szembesülnél a valósággal egy mérés kapcsán, átértékelődne, és erősen árnyalódna benned az a mindent elmosó, leegyszerűsítő kifejezés, hogy "teszi a dolgát", meg hogy "működik" valami.
A motordinamikai méréseimnek a valóság feltárásával, megmutatásával, publikálásával pont az az egyik célja, hogy egy kis szemléletváltozás, elgondolkozás is induljon be egyes emberek gondolkodásmódjában, függetlenül attól, hogy hobbysta vagy profi CNC felhasználó.
Ez valóban más kérdés, ez a te magánügyed, aminek semmi köze az én mérésemhez.
Mellesleg egy léptető motornak üzemszerű használata az egész lépéses felbontás, és bizonyos alkalmazásoknál az előnyei miatt csak ez a jó megoldás. Így ennek a bemérése alapkövetelmény egy mérőrendszernél.
"Ja és a motorjaim teszik a dolgukat"
Semmi komoly bemérésen gondolom nem esett át a motorhajtásod, amiből a valós pozíciókövetési hibáját tudnád. Így csak abban lehetsz biztos, hogy az aktuális ideális, elméleti szögponthoz képest +- 3.6 fokon belül valahol mindig kóvályog a szerencsétlen léptetőmotorod. Ha szembesülnél a valósággal egy mérés kapcsán, átértékelődne, és erősen árnyalódna benned az a mindent elmosó, leegyszerűsítő kifejezés, hogy "teszi a dolgát", meg hogy "működik" valami.
A motordinamikai méréseimnek a valóság feltárásával, megmutatásával, publikálásával pont az az egyik célja, hogy egy kis szemléletváltozás, elgondolkozás is induljon be egyes emberek gondolkodásmódjában, függetlenül attól, hogy hobbysta vagy profi CNC felhasználó.
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2017 szeptember 18, 07:26
Írta: Motoros Dátum 2017 szeptember 18, 07:26
A Tb6560-ról volt szó. A TB 6600-hoz volt szerencsém, az első bekapcsolásnál visszaadta a lelkét a gyártójának.Elment kicsit a kedvem, nem tudom mi lehetett a baj...egytengelyes variáció volt.
Cím: Re:Léptetőmotor
Írta: fn47xk7ei Dátum 2017 szeptember 18, 07:38
Írta: fn47xk7ei Dátum 2017 szeptember 18, 07:38
Nekem léptetőmotoros a plazmavágóm és elég nagy a mozgástere ( Y- 4200 mm ) és mivel szigorú ember vagyok és katona is voltam így szigorú parancsba adtam a gépemnek , hogy előre menetben csak annyi lépésvesztés lehet ( statisztikailag ) mint hátramenetben - lelépni meg nem lehet ...leléphet ![#vigyor2][#nevetes1]
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 szeptember 18, 08:21
Írta: 4ybj8h3c8 Dátum 2017 szeptember 18, 08:21
A TéBéknél arra figyelj a legjobban, hogy az áram beállító poti minimumon legyen. Nagyon nem szereti ha nem onnan kezded a beállítást.
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 szeptember 18, 08:27
Írta: 4ybj8h3c8 Dátum 2017 szeptember 18, 08:27
A tanítás az lenne, ha dörgedelmes kioktató kisregények helyett közölnéd, hogy mi volt az ellépés pontos oka, hogyan sikerült elérni, és főleg, hogy hogyan lehet elkerülni. Az itt lévőket ez a fajta kommunikációd jobban érdekelné, és téged is jobban elfogadnának, ha nem csak a Robsyreklámmal foglalkoznál, hanem segítséget is adnál.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 18, 08:47
Írta: 000000000 Dátum 2017 szeptember 18, 08:47
Unalmas vagy nagyon![#ejnye1]
Én arról ugyanis nem tehetek, hogy benned meg még kb. összesen a szokásos 6-8 emberben csak a topikrombolás, a rosszindulat, a téves előítélet él velem kapcsolatban évek óta. Objektivitás, saját erőfeszítés, elgondolkozás a szakmai dolgok megértésre, annak kapcsán amit írogattok itt, az pedig majnem egyenlő a nullával a viselkedésetek kapcsán. A minimális agyi munkát, a normális gondolataid elidítását a fejedben neked kell elvégezni, ebben én nem segíthetek.
Csináljad, csináljátok a kavarást, engem nem zavar, viszont ez minden többi objektív olvasó (ŐK sokkal többen vannak, mint ti, 2000 >> 8) szemében csakis téged, benneteket minősít. Számtalanszor kértem, konkrét szakmai dolgot kritizálj, ha találsz ilyet az irományaimban, ez egy műszaki szakmai fórum lenne!
Én arról ugyanis nem tehetek, hogy benned meg még kb. összesen a szokásos 6-8 emberben csak a topikrombolás, a rosszindulat, a téves előítélet él velem kapcsolatban évek óta. Objektivitás, saját erőfeszítés, elgondolkozás a szakmai dolgok megértésre, annak kapcsán amit írogattok itt, az pedig majnem egyenlő a nullával a viselkedésetek kapcsán. A minimális agyi munkát, a normális gondolataid elidítását a fejedben neked kell elvégezni, ebben én nem segíthetek.
Csináljad, csináljátok a kavarást, engem nem zavar, viszont ez minden többi objektív olvasó (ŐK sokkal többen vannak, mint ti, 2000 >> 8) szemében csakis téged, benneteket minősít. Számtalanszor kértem, konkrét szakmai dolgot kritizálj, ha találsz ilyet az irományaimban, ez egy műszaki szakmai fórum lenne!
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 szeptember 18, 09:17
Írta: 4ybj8h3c8 Dátum 2017 szeptember 18, 09:17
A te döntésed, hogy mérnökként viselkedsz, és egy mérést úgy vezetsz elő, hogy arról beszélni is lehessen, vagy folytatod a jól megszokott durcás óvodás szinteden.
Tehát: Mi az indoka az ellépésnek, vezesd elő a mérési összeállítást, amiről senki semmit nem tud, de mindenkitől elvárod, hogy a kisujjából kirázza, és egyből meg lehet beszélni a mérés eredményét. Ha tudod, hogy miért lép el, mondd meg, ha nem akkor meg ne vergődj, csak magadat nevetteted ki mint az tőled megszokott.
Nem keresem vissza, mintha azt hablatyoltad volna, hogy üres tengellyel mérsz, így megkérdezem, az ellépés jelalakját milyen módon veszed fel, ha ez a tengelyre csatlakozik akkor már egyből gáz a dumád, mert nem üres, milyen terheléssel jár ez a készülék a motor felé? Csak, hogy legyen mire válaszolnod a mellébeszélés helyett, és végre valódi mérnökként viselkedned.
Tehát: Mi az indoka az ellépésnek, vezesd elő a mérési összeállítást, amiről senki semmit nem tud, de mindenkitől elvárod, hogy a kisujjából kirázza, és egyből meg lehet beszélni a mérés eredményét. Ha tudod, hogy miért lép el, mondd meg, ha nem akkor meg ne vergődj, csak magadat nevetteted ki mint az tőled megszokott.
Nem keresem vissza, mintha azt hablatyoltad volna, hogy üres tengellyel mérsz, így megkérdezem, az ellépés jelalakját milyen módon veszed fel, ha ez a tengelyre csatlakozik akkor már egyből gáz a dumád, mert nem üres, milyen terheléssel jár ez a készülék a motor felé? Csak, hogy legyen mire válaszolnod a mellébeszélés helyett, és végre valódi mérnökként viselkedned.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 szeptember 18, 09:38
Írta: svejk Dátum 2017 szeptember 18, 09:38
Most végigszaladtam pár beíráson, a Pál és Lazi féle néha értelmetlen támadásokat én is elítélem, bár ugye néha én is elkövetek ilyeneket, mint ahogy Te is elköveted azt más topicban.
No de a lényeg, még mindig nem értem mire akarsz kilyukadni...
Aki valaha is megvezérelt egy léptetőmotort az tisztában van a 300-as fordulat körüli rezonanciával, a lépésvesztéssel, visszafelé forgással, sőt már vagy 8-9 éve rávilágított egy szerény fórumtársunk arra is amit tegnap írtál, hogy a léptető egyszerre minimum 4 egész lépést tud csak veszteni.
Ezt anno mindenki el is fogadta mint princípium.
No persze azóta már majd fél nemzedék felnőtt, tehát nem árt ismételni, vagy újra kezdeni a tanítást.
De személy szerint én is azt várnám, -hogy ha már így nekiveselkedtél a témának,- hogy pl. ugyanaz a motor 3-4 különféle szituációban mit tud a tesztelt vezérlőkkel.
(persze tudom én hogy nehéz kihozni vesztesnek esetleg egy közismert vezérlőt, de meg kell tenni a cél érdekében)
Bizonyos, hogy a kínai barátaink sokat fejlesztettek erre a témára, a 80-as évekbeli ipari vezérlőket simán verik a mostani DSP-s technikával.
(anno én még az L297-et is tuningolgattamtam úgy, hogy egy lépés kétféle áramból állt egy nagy pofon induláskor és egy lecsengés a pozícióba állásra)
Ami a grafikont illeti, nem tudom észrevetted-e hogy egyre csicsásabb.
De nem baj, mi így szeretjük. :)
(mellesleg az S :200-ra én sem jöttem volna rá ha addig is élek mint egy teknősbéka, no meg a fordulatszám jele az "n" és nem az "N", bár a mértékegység valamelyest egyértelműsíti.
De ezek már csak szőrszálhasogatások, de volt kitől tanulni :) )
más:
Székesfehérváron a találkozón láthatunk-e majd valami ilyesmi bemutatót Tőled?
No de a lényeg, még mindig nem értem mire akarsz kilyukadni...
Aki valaha is megvezérelt egy léptetőmotort az tisztában van a 300-as fordulat körüli rezonanciával, a lépésvesztéssel, visszafelé forgással, sőt már vagy 8-9 éve rávilágított egy szerény fórumtársunk arra is amit tegnap írtál, hogy a léptető egyszerre minimum 4 egész lépést tud csak veszteni.
Ezt anno mindenki el is fogadta mint princípium.
No persze azóta már majd fél nemzedék felnőtt, tehát nem árt ismételni, vagy újra kezdeni a tanítást.
De személy szerint én is azt várnám, -hogy ha már így nekiveselkedtél a témának,- hogy pl. ugyanaz a motor 3-4 különféle szituációban mit tud a tesztelt vezérlőkkel.
(persze tudom én hogy nehéz kihozni vesztesnek esetleg egy közismert vezérlőt, de meg kell tenni a cél érdekében)
Bizonyos, hogy a kínai barátaink sokat fejlesztettek erre a témára, a 80-as évekbeli ipari vezérlőket simán verik a mostani DSP-s technikával.
(anno én még az L297-et is tuningolgattamtam úgy, hogy egy lépés kétféle áramból állt egy nagy pofon induláskor és egy lecsengés a pozícióba állásra)
Ami a grafikont illeti, nem tudom észrevetted-e hogy egyre csicsásabb.
De nem baj, mi így szeretjük. :)
(mellesleg az S :200-ra én sem jöttem volna rá ha addig is élek mint egy teknősbéka, no meg a fordulatszám jele az "n" és nem az "N", bár a mértékegység valamelyest egyértelműsíti.
De ezek már csak szőrszálhasogatások, de volt kitől tanulni :) )
más:
Székesfehérváron a találkozón láthatunk-e majd valami ilyesmi bemutatót Tőled?
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 szeptember 18, 10:25
Írta: 4ybj8h3c8 Dátum 2017 szeptember 18, 10:25
Mi az értelmetlen abban, ha megpróbálunk használható információt kiszedni belőle ahelyett, hogy kiragad mondatokat valaki hozzászólásából és arra pattog? Adott bármilyen tanácsot arra, hogy mivel lehet elkerülni az általa felvázolt hibát? Nem, és te is nagyon jól tudod, hogy nem is fog, de 3 nap múlva jön egy újabb ábra és azzal próbálja meg igazolni a semmit.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 szeptember 18, 10:33
Írta: svejk Dátum 2017 szeptember 18, 10:33
Azt írtam : "néha értelmetlen".
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 szeptember 18, 10:36
Írta: 4ybj8h3c8 Dátum 2017 szeptember 18, 10:36
Ez igaz.
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 szeptember 18, 10:40
Írta: 4ybj8h3c8 Dátum 2017 szeptember 18, 10:40
Mondjuk azt hiszem már leírtam, de én azóta aprítom a komát, amióta egy vadonatúj belépő normálisan feltett kérdésére olyan ótvar bunkó stílusban osztotta ki szerencsétlent, amilyennel régebben elég sokat kommunikált.
Ez az én hibám, hiányzik belőlem a tekintélytisztelet, főleg ha meg sem érdemlik, és védem a gyengébbet.
Ez az én hibám, hiányzik belőlem a tekintélytisztelet, főleg ha meg sem érdemlik, és védem a gyengébbet.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 18, 10:51
Írta: 000000000 Dátum 2017 szeptember 18, 10:51
"De személy szerint én is azt várnám, -hogy ha már így nekiveselkedtél a témának,- hogy pl. ugyanaz a motor 3-4 különféle szituációban mit tud a tesztelt vezérlőkkel."
Arról nem tehetek, hogy szelektíven olvasol te is, innentől kezdve hibára, igaztalan állításodra építve teszed fel a kérdésed.
Ugyanis az 5425-ben pl. pont azt történt, amit vársz.
Fehérvárra voltak terveim ezzel kapcsolatban is, István is invitált, amit külön köszönök neki. Azonban a sorozatos ok nélküli támadások, kötözködések miatt erősen el kell gondolkoznom még, van-e értelme bármit is bemutatnom. Kaja, pia, duma, bizniszasztal van nélkülem is a találkozón, ez kell a népeknek.:)
Akit pedig komolyan érdekel, és megérti a mondanivalóm lényegét, az már személyesen megkeresett régen is, most is, és szívesen segítek, bemérem a cuccát.
Arról nem tehetek, hogy szelektíven olvasol te is, innentől kezdve hibára, igaztalan állításodra építve teszed fel a kérdésed.
Ugyanis az 5425-ben pl. pont azt történt, amit vársz.
Fehérvárra voltak terveim ezzel kapcsolatban is, István is invitált, amit külön köszönök neki. Azonban a sorozatos ok nélküli támadások, kötözködések miatt erősen el kell gondolkoznom még, van-e értelme bármit is bemutatnom. Kaja, pia, duma, bizniszasztal van nélkülem is a találkozón, ez kell a népeknek.:)
Akit pedig komolyan érdekel, és megérti a mondanivalóm lényegét, az már személyesen megkeresett régen is, most is, és szívesen segítek, bemérem a cuccát.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 szeptember 18, 11:06
Írta: svejk Dátum 2017 szeptember 18, 11:06
Elolvastam még egyszer az #5425-öt.
Ott kiderül mire jó, ezt eddig is tudtam/tuk.
De neked mi a célod vele?
Kitelepülni és az hobbysta által összevásárolt rendszereket bemérni?
Vagy vigye el az emberke a rendszereit és otthon méred be neki?
Esetleg a bemérőrendszert árulni? (ezt kétlem)
Ha csak saját magad megnyugtatására, szakmai fejlődésedre, akkor meg minek kezdted el publikálni?
Szóval ahogy írták már többen is ez eddig olyan nesze semmi fogd meg jól.
No de mindegy, "ugorgyunk!"
Fehérvár... Azzal a pár emberrel ne foglalkozz aki támad, többen nem is járnak közülük a találkozókra.
Engem meg ismersz, tőlem aztán nem kell félned :)
Viszont biztos vannak itt jó páran akik szívesen meghallgatnának, kérdéseket tennének fel.
Sok látogató nem is aktív itt a fórumon, ami mellékesen szólva érthető is a sok cirkusz miatt.
Ott kiderül mire jó, ezt eddig is tudtam/tuk.
De neked mi a célod vele?
Kitelepülni és az hobbysta által összevásárolt rendszereket bemérni?
Vagy vigye el az emberke a rendszereit és otthon méred be neki?
Esetleg a bemérőrendszert árulni? (ezt kétlem)
Ha csak saját magad megnyugtatására, szakmai fejlődésedre, akkor meg minek kezdted el publikálni?
Szóval ahogy írták már többen is ez eddig olyan nesze semmi fogd meg jól.
No de mindegy, "ugorgyunk!"
Fehérvár... Azzal a pár emberrel ne foglalkozz aki támad, többen nem is járnak közülük a találkozókra.
Engem meg ismersz, tőlem aztán nem kell félned :)
Viszont biztos vannak itt jó páran akik szívesen meghallgatnának, kérdéseket tennének fel.
Sok látogató nem is aktív itt a fórumon, ami mellékesen szólva érthető is a sok cirkusz miatt.
Cím: Re:Léptetőmotor
Írta: Bencze András Dátum 2017 szeptember 18, 11:18
Írta: Bencze András Dátum 2017 szeptember 18, 11:18
Szerencsésebb lenne (a gyengébbek kedvéért mint én) részletes szamárvezetőt adnod az ábráidhoz. Akkor sok félreértésnek és még ki tudja minek vennéd elejét.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 18, 11:38
Írta: 000000000 Dátum 2017 szeptember 18, 11:38
"De neked mi a célod vele?"
Röviden pl. ilyesmi céljaim vannak: az analóg világ, a valóság, a műszaki tények bemutatása, gondolatok ébresztése, a sok csicsa hazugság felfedése, adott CNC gép gyártási-minőségi paramétereinek a megállapítása a hajtás lánc hibái kapcsán, különböző CNC vezérlők, hajtáselektronikák, motorok pályakövetési, mozgásdinamikai képességének a megállapítása, összehasonlítása, stb... Aztán még napestig sorolhatnám.
"... ez eddig olyan nesze semmi fogd meg jól. No de mindegy, ugorgyunk!"
Sajnálom, hogy az előbbi céljaim közül egyse ment át hozzád az eddigi bejegyzéseim kapcsán. Így valóban ugorgyunk!
Röviden pl. ilyesmi céljaim vannak: az analóg világ, a valóság, a műszaki tények bemutatása, gondolatok ébresztése, a sok csicsa hazugság felfedése, adott CNC gép gyártási-minőségi paramétereinek a megállapítása a hajtás lánc hibái kapcsán, különböző CNC vezérlők, hajtáselektronikák, motorok pályakövetési, mozgásdinamikai képességének a megállapítása, összehasonlítása, stb... Aztán még napestig sorolhatnám.
"... ez eddig olyan nesze semmi fogd meg jól. No de mindegy, ugorgyunk!"
Sajnálom, hogy az előbbi céljaim közül egyse ment át hozzád az eddigi bejegyzéseim kapcsán. Így valóban ugorgyunk!
Cím: Re:Léptetőmotor
Írta: MoparMan Dátum 2017 szeptember 18, 11:45
Írta: MoparMan Dátum 2017 szeptember 18, 11:45
egy kicsit finomabban add elő, de most teljesen igazad van egyébként.
aki nem ért hozzá, az nem tudja "kigondolni" a miérteket. ha elmagyarázzák neki akkor van esély.
aki nem ért hozzá, az nem tudja "kigondolni" a miérteket. ha elmagyarázzák neki akkor van esély.
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 szeptember 18, 11:49
Írta: 4ybj8h3c8 Dátum 2017 szeptember 18, 11:49
Most nem keresem vissza, de valaki nem oly rég Palinak nagyon jól megfogalmazott egy választ. Nem szó szerint:
A DRV és TB meghajtók az adott fejlesztési környezetükben nagyon jól és hibátlanul működtek, aztán jöttek a CNC-sek és elkezdték ilyen-olyan áramköri változatokkal mókolni és megsértődtek, hogy nem jól teljesít.
Most jössz te, hogy: .... a megoldás erre az, hogy a 8-as lábra 10 nF helyett 33nF, a tápszűrő nem 2200 hanem 1300 uF és hasonlók.
Ezen a fórumon ez lenne a tanítás és a segítség. Hogy példával is szolgáljak, amit reggel írtam, TB áramköröknélbemérésnél áram poti letekerve, minimummal indít, mert különben durran. A vágyaidra keress olyat ahol NASA szintű társalkodó partnereid vannak.
A DRV és TB meghajtók az adott fejlesztési környezetükben nagyon jól és hibátlanul működtek, aztán jöttek a CNC-sek és elkezdték ilyen-olyan áramköri változatokkal mókolni és megsértődtek, hogy nem jól teljesít.
Most jössz te, hogy: .... a megoldás erre az, hogy a 8-as lábra 10 nF helyett 33nF, a tápszűrő nem 2200 hanem 1300 uF és hasonlók.
Ezen a fórumon ez lenne a tanítás és a segítség. Hogy példával is szolgáljak, amit reggel írtam, TB áramköröknélbemérésnél áram poti letekerve, minimummal indít, mert különben durran. A vágyaidra keress olyat ahol NASA szintű társalkodó partnereid vannak.
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 szeptember 18, 11:53
Írta: 4ybj8h3c8 Dátum 2017 szeptember 18, 11:53
Erről beszélek. Van egy terület, aminek a szakértője. Mindenki elismeri, ebben nincs vita. De elvárja azt, hogy egy olyan ember aki életében nem foglalkozott léptetőmotorral, de pl. penge a mikrohullámú technikában amihez meg ő nem tudna hozzászólni, az profi módon gyenge utalások, tizedinformációk alapján azonnal kenje vágja azt amire ő az életét áldozta. Én is tudnék olyat kérdezni tőle amiről fingja nem lenne mert nem CNC és hajtástechnika de van annyi agyam, hogy nem várom el, hogy penge legyen benne.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 18, 14:24
Írta: 000000000 Dátum 2017 szeptember 18, 14:24
Én meg azt gondolom, az a szerencsés, ha valamit nem értesz a bejegyzésemből, akkor ne a téves feltételezésedre építve kérdezzél, kérjél, hanem előbb légy biztos benne. Annak pedig az a módja, hogy rákérdezel előbb, pl. így: Ez a mérés teljes lépéses üzemmódban történt? Ha ez megtörtén volna megkaptad volna a helyes választ (ami egyébként ugye ott van S:200), és így akkor már nem írsz ilyen rossz mondatot:
"Kérlek csináld meg ugyanezt teljes lépéssel is."
Ezér a mondatért tehát téged terhel a felelősség a fentiek alapján, és nyomát nem látom, hogy ezt észrevetted volna, sőt engem terhelnél mindenféle adminisztratív "litánia" , "szamárvezető" beírásával, amihez se időm, se energiám, se módom, se kedvem itt.
"Kérlek csináld meg ugyanezt teljes lépéssel is."
Ezér a mondatért tehát téged terhel a felelősség a fentiek alapján, és nyomát nem látom, hogy ezt észrevetted volna, sőt engem terhelnél mindenféle adminisztratív "litánia" , "szamárvezető" beírásával, amihez se időm, se energiám, se módom, se kedvem itt.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 szeptember 18, 14:55
Írta: svejk Dátum 2017 szeptember 18, 14:55
Nem egyszerűbb lenne -akár paint-el- kijavítani azt a vacak grafikont, mint azt az apró hibát/hiányosságot másra kenni?
Szerintem fórumtársunkat is csak a jó szándék vezérelte és kérése egyáltalán nem volt sértő.
Még ha kicsit értetlennek is tűnik a koma.
Írj az S helyett step-et vagy lépést.
(közben azt a nagy N-t is kijavíthatod)
Szerintem fórumtársunkat is csak a jó szándék vezérelte és kérése egyáltalán nem volt sértő.
Még ha kicsit értetlennek is tűnik a koma.
Írj az S helyett step-et vagy lépést.
(közben azt a nagy N-t is kijavíthatod)
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2017 szeptember 18, 15:13
Írta: PSoft Dátum 2017 szeptember 18, 15:13
Nem akarom iderakni...
(majd, ha Tibor engedi)
Így gondltad? (http://cnctar.hobbycnc.hu/PSoft/Vegyes/Grafikon.gif):)
(majd, ha Tibor engedi)
Így gondltad? (http://cnctar.hobbycnc.hu/PSoft/Vegyes/Grafikon.gif):)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 18, 15:21
Írta: 000000000 Dátum 2017 szeptember 18, 15:21
"Nem egyszerűbb lenne -akár paint-el- kijavítani azt a vacak grafikont, mint azt az apró hibát/hiányosságot másra kenni?"
Te most pont azt a hibát követted el, amit írtam válaszként az előbb Andrásnak.
1. Nem "kenek hibát", ezt a te téves értelmezésed, minősítésed rám.
2. A téves értelmezésed kapcsán ráadásul el kezdesz nekem te is plussz feladatokat adni, amikor mindez fölösleges, és írtam, se időm, se energiám, se semmi...
Te most pont azt a hibát követted el, amit írtam válaszként az előbb Andrásnak.
1. Nem "kenek hibát", ezt a te téves értelmezésed, minősítésed rám.
2. A téves értelmezésed kapcsán ráadásul el kezdesz nekem te is plussz feladatokat adni, amikor mindez fölösleges, és írtam, se időm, se energiám, se semmi...
Cím: Re:Léptetőmotor
Írta: Bencze András Dátum 2017 szeptember 18, 16:30
Írta: Bencze András Dátum 2017 szeptember 18, 16:30
Akkor sárgával az X tengelynél mi az 1/8 step? Csinálj akkor egyértelmű ábrát, grafikont. De hidd el, nagyon sok energiát megspórolhatnál, ha magyaráznál is egy kicsit. Hidd el teljes jóindulatból mondom.
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 szeptember 18, 16:41
Írta: 4ybj8h3c8 Dátum 2017 szeptember 18, 16:41
Ha a válaszok felét válaszadásra használnád kioktatás helyett, a fele időd felszabadulna... Erre nem gondoltál?
Az jut eszembe rólad, hogy amikor valaki egy kéretlen reklámlevélre dörgedelmes válaszlevelet fogalmaz másfél oldalon keresztül, kikeresi a jogszabályt, abból idézget, eltölt vele 15-20 percet az "X" vagy a "DEL" gomb fél másodperces megnyomása helyett. Próbáld ki, ha nem kioktatod a népet, hanem a kérdésre válaszolsz tizedannyi terjedelemben, neked is több időd marad.
Az jut eszembe rólad, hogy amikor valaki egy kéretlen reklámlevélre dörgedelmes válaszlevelet fogalmaz másfél oldalon keresztül, kikeresi a jogszabályt, abból idézget, eltölt vele 15-20 percet az "X" vagy a "DEL" gomb fél másodperces megnyomása helyett. Próbáld ki, ha nem kioktatod a népet, hanem a kérdésre válaszolsz tizedannyi terjedelemben, neked is több időd marad.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 18, 17:06
Írta: 000000000 Dátum 2017 szeptember 18, 17:06
Hányadszor írjam le: Ott van, hogy S : 200 a step felbontás a vezérlőn a méréskor. Ettől pedig az teljesen független, hogy az abszcissza tengelynek mennyivel kisebb skálaosztást (microstep-et) választok. Egy a lényeg, hogy a feltüntetett step mértékegység pontosan kiadja egy 1.8 fokos alapszög lépésű motor szögpozíció értékét, ha beszorozzuk vele a microstephez tartozó szögértékét. Ez pl. 40 db 1/8-os microstep esetén 9 fok, ez is világosan ott van.
Komolyan mondom, ilyen triviális dolgon rágódni már huszadszor ez kiborító, amikor ez ezred rangú kötekedő értetlenkedés ahhoz képest, amit az egész mérés mutat és tanít nekünk.[#falbav]
Komolyan mondom, ilyen triviális dolgon rágódni már huszadszor ez kiborító, amikor ez ezred rangú kötekedő értetlenkedés ahhoz képest, amit az egész mérés mutat és tanít nekünk.[#falbav]
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 szeptember 18, 17:06
Írta: 4ybj8h3c8 Dátum 2017 szeptember 18, 17:06
Amúgy, hogy tényleg szakmai síkon mozogjunk, ezzel a diagrammal sokunkat páros lábbal vágtak volna ki. Semmit nem tartalmaz. Milyen üzemmódban fut a 8825, hol áll a Decay, ami kurvára nem mindegy üzem szempontjából, és mekkora árammal van hajtva. Mekkora feszültséggel? Csupa olyan info hiányzik ami nélkül a diagramod csak sorminta.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2017 szeptember 18, 20:02
Írta: s7manbs8 Dátum 2017 szeptember 18, 20:02
Ne is mondd, épp most szenvedek hasonló grafikus ábrák megjelenítésével, sok idő az, mire egy jó kinézetűá, meg mindent tartalmazó, mégis átlátható valamit összehozni, még pénzért csinálva is kínlódás, nemhogy csak úgy szórakozásból. :)
Cím: Re:Léptetőmotor
Írta: kaqkk007 Dátum 2017 szeptember 18, 20:20
Írta: kaqkk007 Dátum 2017 szeptember 18, 20:20
"Azzal a pár emberrel ne foglalkozz aki támad" Egyáltalán nem volt célom soha senkit támadni a fórumon (nem is az én stílusom) de mint látjuk a kezdő hiába kérdez a mérnök úrtól ő csak a haverokkal áll szóba, a többi neki mind csak .......
Cím: Re:Léptetőmotor
Írta: Dakota25 Dátum 2017 szeptember 18, 20:40
Írta: Dakota25 Dátum 2017 szeptember 18, 20:40
Mintha sikerült volna elcsípni egy olyan léptetési frekvenciát, aminél a pólusváltás majdnem a létező legrosszabbkor érkezik a saját lengéseit végző forgórész számára. Ez egy elég ronda rezonancia jelenségnek tűnik.
Valószínűleg az említett "bögrés forgató" inerciája nem rontana, hanem javítana a kialakult helyzeten, nagyobb periódusidő felé hangolva a forgórész önrezgését.
Valószínűleg az említett "bögrés forgató" inerciája nem rontana, hanem javítana a kialakult helyzeten, nagyobb periódusidő felé hangolva a forgórész önrezgését.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 19, 08:25
Írta: 000000000 Dátum 2017 szeptember 19, 08:25
Így van, az előjelei már megvoltak a 0.5 1/s mérésnél is, hogy itt baj lesz, hatalmas amplitúdójú rezgésekkel terhelt volt a görbe, mondhatnánk hivány minőségű volt itt már a pozíció követése. Ezeknek a méréseknek az egyik célja a sok közül a veszélyes rezonancia pontok megállapítása egy adott motor/hajtás párosnál. Ennél a hajtásverziónál az 5456 bejegyzés képe alapján 0.7 ... 0.8 1/s az egyik ilyen veszélyes fordulatszám tartomány.
(http://www.robsy.hu/te2/robsy-motor-measure-e2.gif)
A bögre azért egy "veszélyes" jószág, mivel a gyűrűszerű palást kialakítása koncentráltan valósítja meg a nagy J-t, azaz ideális lendkerék.
Mivel a Robsy motordinamikai mérés egységugrás vizsgáló jelet alkalmaz, ha a terhelési J / motor J arány túl nagy lesz, sajnos a motor el se tud indulni, egy helyben kezd össze-vissza rezegni. Abban viszont igazad van, a nagyobb motor tengelyre redukált J csökkenti a rezonancia frekvencia értékét, viszont alaposan rontja a dinamikáját a motornak. A rossz dinamikájú hajtás pedig előbb-utóbb lépésvesztéshez vezet.
(http://www.robsy.hu/te2/robsy-motor-measure-e2.gif)
A bögre azért egy "veszélyes" jószág, mivel a gyűrűszerű palást kialakítása koncentráltan valósítja meg a nagy J-t, azaz ideális lendkerék.
Mivel a Robsy motordinamikai mérés egységugrás vizsgáló jelet alkalmaz, ha a terhelési J / motor J arány túl nagy lesz, sajnos a motor el se tud indulni, egy helyben kezd össze-vissza rezegni. Abban viszont igazad van, a nagyobb motor tengelyre redukált J csökkenti a rezonancia frekvencia értékét, viszont alaposan rontja a dinamikáját a motornak. A rossz dinamikájú hajtás pedig előbb-utóbb lépésvesztéshez vezet.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 19, 09:04
Írta: 000000000 Dátum 2017 szeptember 19, 09:04
A tömeg nem számít hobby szinten !
Iparban sem 10 grammos enkoder üvegtárcsákat forgatnak üresen ezért van a felfutási lefutási rámpa.
Sőt ipari gépen ha úgymond 0 idő alatt akarnák felgyorsítani azt a brutális tömeget abból baj lenne.
Ezért van iparban az S görbe ami aztán totálisan ellentmond mindenféle ugribugri bohóckodásnak !
Alábbi videó is jól demonstrálja, és képzeld el ezt egységugribugri bohóckodással amit SEHOL nem használnak cnc technikában !
Még a pohár sor is elrepülne a francba ! [#nevetes1]
Iparban sem 10 grammos enkoder üvegtárcsákat forgatnak üresen ezért van a felfutási lefutási rámpa.
Sőt ipari gépen ha úgymond 0 idő alatt akarnák felgyorsítani azt a brutális tömeget abból baj lenne.
Ezért van iparban az S görbe ami aztán totálisan ellentmond mindenféle ugribugri bohóckodásnak !
Alábbi videó is jól demonstrálja, és képzeld el ezt egységugribugri bohóckodással amit SEHOL nem használnak cnc technikában !
Még a pohár sor is elrepülne a francba ! [#nevetes1]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 19, 09:13
Írta: 000000000 Dátum 2017 szeptember 19, 09:13
Ezt figyeld !
Mérőpad se kell ahhoz, hogy látni lehessen a lépéshibát!
Csak a gyorsítást kell csökkenteni és nem egységugribugrizni [#hehe]
Mérőpad se kell ahhoz, hogy látni lehessen a lépéshibát!
Csak a gyorsítást kell csökkenteni és nem egységugribugrizni [#hehe]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 19, 09:32
Írta: 000000000 Dátum 2017 szeptember 19, 09:32
Fejezd már be ezt a borzalmas topikromboló, szakmaiatlan, primitív dumádat, stílusodat. Eleve nem is értem, miért nem vagy kitiltva pár hétre az olyan szövegeléseid után, ahol "senkinek" merészelsz nevezni engem, és csak egy mezei kitörléssel megúszod a viselkedésedet 5503-06 között.
Cím: Re:Léptetőmotor
Írta: Dakota25 Dátum 2017 szeptember 19, 09:40
Írta: Dakota25 Dátum 2017 szeptember 19, 09:40
Ez nem gyorsítási jelenség. A rezonancia képes akár a szépen forgó motor megállítására is szerencsétlen esetben.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 19, 09:46
Írta: 000000000 Dátum 2017 szeptember 19, 09:46
Akkor nem jött át a mondanivalóm, tehát a rezonanciára orvosság a "lendkerék" a lendkerékre orvosság a felfutási görbe !
A dinamika 126 rendű hobby szinten, inkább legyen lassú a gép , de biztos mint ugribugrizzon összevissza aztán szétverje az orsókat meg mindent és lépést tévesszen !
A dinamika 126 rendű hobby szinten, inkább legyen lassú a gép , de biztos mint ugribugrizzon összevissza aztán szétverje az orsókat meg mindent és lépést tévesszen !
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 19, 09:51
Írta: 000000000 Dátum 2017 szeptember 19, 09:51
Nem tudom mit írt ez a [5512] hozzászólásában mivel letiltottam , de ha a szokásos lejárató kicsinyes szakmaiatlan dumát akkor kérem töröld, ha a nem is ehhez intézett hozzászólásomat is törölted !
Köszi !
Köszi !
Cím: Re:Léptetőmotor
Írta: Dakota25 Dátum 2017 szeptember 19, 09:52
Írta: Dakota25 Dátum 2017 szeptember 19, 09:52
Ezzel viszont egyetértek. A hobbysta kénytelen egyben megalkuvó is lenni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 19, 10:04
Írta: 000000000 Dátum 2017 szeptember 19, 10:04
Pontosan ahogy mondod a megalkuvás a kis pénztárca lényege !
Aki léptetőmotorral kezd az már eleve belenyugodott abba ami van. (szintén ott vagyunk A kis pénztárcánál)
Jobb vezérlővel lehet javítani a tulajdonságain, de a léptetőmotor alapértelmezetten rezonál !
Gyengébb vezérlőtől nem kell csodát várni, együtt kell vele élni ! (erre volt pénz hát erre volt pénz, együtt kell vele élni)
Vagy le kell rontani a dinamikát, hogy ne legyen káros rezonancia. ("lendkerék" vagy ámerikániasan damper)
Ez ellen akármilyen mérnök se tudna mit csinálni méregetéses bohóckodással ha a pénztárca ennyit enged !
Aki léptetőmotorral kezd az már eleve belenyugodott abba ami van. (szintén ott vagyunk A kis pénztárcánál)
Jobb vezérlővel lehet javítani a tulajdonságain, de a léptetőmotor alapértelmezetten rezonál !
Gyengébb vezérlőtől nem kell csodát várni, együtt kell vele élni ! (erre volt pénz hát erre volt pénz, együtt kell vele élni)
Vagy le kell rontani a dinamikát, hogy ne legyen káros rezonancia. ("lendkerék" vagy ámerikániasan damper)
Ez ellen akármilyen mérnök se tudna mit csinálni méregetéses bohóckodással ha a pénztárca ennyit enged !
Cím: Re:Léptetőmotor
Írta: Dakota25 Dátum 2017 szeptember 19, 10:11
Írta: Dakota25 Dátum 2017 szeptember 19, 10:11
Gyors, pontos és olcsó!
Ezek közül ÖN kettőt szabadon választhat.
Ezek közül ÖN kettőt szabadon választhat.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 19, 10:13
Írta: 000000000 Dátum 2017 szeptember 19, 10:13
[#eljen]
Ne állj le egy ilyen alaphiányos tudású, ám topikromboló emberrel szakmailag vitázni, hiszen a nyitómondata is annyira primitív és nevetéséges:
"A tömeg nem számít hobby szinten !"[#nevetes1]
Láthatod a végeredményt, szétcseszte azt az értelmes, szakszerű gondolatot, szálat, amit Te felvetettél és én meg folytattam egy újabb mérési eredmény linkelésvel, nevezeteses a különböző hajtástechnikák, különösen a léptetőmotoros hajtások rezonancia frekvenciájának a problematikáját.
Ne állj le egy ilyen alaphiányos tudású, ám topikromboló emberrel szakmailag vitázni, hiszen a nyitómondata is annyira primitív és nevetéséges:
"A tömeg nem számít hobby szinten !"[#nevetes1]
Láthatod a végeredményt, szétcseszte azt az értelmes, szakszerű gondolatot, szálat, amit Te felvetettél és én meg folytattam egy újabb mérési eredmény linkelésvel, nevezeteses a különböző hajtástechnikák, különösen a léptetőmotoros hajtások rezonancia frekvenciájának a problematikáját.
Cím: Re:Léptetőmotor
Írta: Dakota25 Dátum 2017 szeptember 19, 10:27
Írta: Dakota25 Dátum 2017 szeptember 19, 10:27
Tibor!
Nem vitázom vagy veszekszem. Beszélgetek.
Megértelek Téged is, a Te megfellebezhetetlen szempontjaidat is, de megértem a szembenállók érveit is. Ez nem háború. Légy Te is kicsit toleránsabb a más nézópontokkal szemben! Élhetőbb lesz a világ.
Régi emlék:
Margarétakerekes Robotron írógép kerékforgató steppere el sem indult a margarétakerék tömege nélkül. "Össze voltak tervezve." Ezt itthon, az asztal sarkán, hiányos eszközparkkal és még hiányosabb ismeretekkel nem lehet összehozni.
Pedig micsoda öröm, amikor egy (akár rettenetesen rossz paraméterekkel rendelkező) masina jól-rosszul de elkezd működni. Nem kell mindennek tökéletesnek lennie.
Nem vitázom vagy veszekszem. Beszélgetek.
Megértelek Téged is, a Te megfellebezhetetlen szempontjaidat is, de megértem a szembenállók érveit is. Ez nem háború. Légy Te is kicsit toleránsabb a más nézópontokkal szemben! Élhetőbb lesz a világ.
Régi emlék:
Margarétakerekes Robotron írógép kerékforgató steppere el sem indult a margarétakerék tömege nélkül. "Össze voltak tervezve." Ezt itthon, az asztal sarkán, hiányos eszközparkkal és még hiányosabb ismeretekkel nem lehet összehozni.
Pedig micsoda öröm, amikor egy (akár rettenetesen rossz paraméterekkel rendelkező) masina jól-rosszul de elkezd működni. Nem kell mindennek tökéletesnek lennie.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 19, 10:42
Írta: 000000000 Dátum 2017 szeptember 19, 10:42
Aki személyesen ismer, tudja rólam, semmi bajom azzal, aki nem ért valamihez (én se értek sok mindenhez, nem is szólok bele olyan témékba, ismerem a határaimat), próbálom elmagyarázni több kevesebb sikerrel a tényeket, ha visszakérdeznek. Viszont ha a szakmaiatlansága még nagyképűséggel, alap tételek vitatásával, egyéb hitvány emberi viselkedéssel (ok nélküli besértődés, kötözködés, topikrombolás, ...) is halmozódik, párosul, az súlyos eset szerintem.
De tudod írtam már, speciális Hobby CNC PID agyi algoritmusom van már az ilyen esetekre, teljesen nyugodtan, higgadtan kezelem az ilyen eseteket, alakokat. Ettől még sajnos elérik a céljukat, nézd csak meg, hányadik nem is idetartozó bejegyzénél tartunk az értelmes, szakmai diskurzus helyett.
De tudod írtam már, speciális Hobby CNC PID agyi algoritmusom van már az ilyen esetekre, teljesen nyugodtan, higgadtan kezelem az ilyen eseteket, alakokat. Ettől még sajnos elérik a céljukat, nézd csak meg, hányadik nem is idetartozó bejegyzénél tartunk az értelmes, szakmai diskurzus helyett.
Cím: Re:Léptetőmotor
Írta: Dakota25 Dátum 2017 szeptember 19, 12:26
Írta: Dakota25 Dátum 2017 szeptember 19, 12:26
Visszatérve a rezonanciához:
A legutóbbi grafikonon mutatott egész szép mozgásnál már nincs közel egymáshoz az önrezgési frekvencia és a léptetési frekvencia.
Az önrezgés kb. másfél periódusa alatt a rendszer csillapításai szépen felemésztik a lengés amplitúdóját, így már boldogul a léptetés a lengéssel szemben.
Nyilván minden lépés egy-egy PID szabályzási történet a maga tragédiáival és sikereivel. A legrosszabb eset az önrezgési frekvencia körüli léptetőfrekinél van.
Az önrezgési hullámhossz többszöröseinél -csillapított jellegű- lecsengése miatt kevésbé vészes a helyzet.
Nyilván számolható-mérhető az önrezgési freki egy konkrét munkapontra, de a valós berendezések munkapontja folyamatosan változik, ráadásul egész széles határok közt.
Félek nem létezik olyan vezérlő, ami két lépés közt átállítja a saját "PID" paramétereit úgy, hogy a következő lépésre optimalizál.
Megoldás lehet az extrém nagy önrezgési freki, hiszen mire jön a következő lépés, addigra lecseng a lengés,
Vagy épp az extrém alacsony, hogy a görbe alulról simuljon rá az alapjelre. (damper)
Azt gondolom, hogy az optimális karakterisztika - egy kis túllövés, felülről simulás - változó körülmények közt nem megvalósítható. Nem csak hobbyszinten.
A legutóbbi grafikonon mutatott egész szép mozgásnál már nincs közel egymáshoz az önrezgési frekvencia és a léptetési frekvencia.
Az önrezgés kb. másfél periódusa alatt a rendszer csillapításai szépen felemésztik a lengés amplitúdóját, így már boldogul a léptetés a lengéssel szemben.
Nyilván minden lépés egy-egy PID szabályzási történet a maga tragédiáival és sikereivel. A legrosszabb eset az önrezgési frekvencia körüli léptetőfrekinél van.
Az önrezgési hullámhossz többszöröseinél -csillapított jellegű- lecsengése miatt kevésbé vészes a helyzet.
Nyilván számolható-mérhető az önrezgési freki egy konkrét munkapontra, de a valós berendezések munkapontja folyamatosan változik, ráadásul egész széles határok közt.
Félek nem létezik olyan vezérlő, ami két lépés közt átállítja a saját "PID" paramétereit úgy, hogy a következő lépésre optimalizál.
Megoldás lehet az extrém nagy önrezgési freki, hiszen mire jön a következő lépés, addigra lecseng a lengés,
Vagy épp az extrém alacsony, hogy a görbe alulról simuljon rá az alapjelre. (damper)
Azt gondolom, hogy az optimális karakterisztika - egy kis túllövés, felülről simulás - változó körülmények közt nem megvalósítható. Nem csak hobbyszinten.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 19, 16:00
Írta: 000000000 Dátum 2017 szeptember 19, 16:00
Valóban így van, a rezonancia ha kicsit komolyabb szinten elmélyülünk benne, nagyon bonyolult dolog. Neked az nem új információ, hogy ugyebár egy villamos motor legalább egy kéttárolós, csillapító taggal ellátott lengőrendszert képez. Erre szépen felállítható egy differenciál egyenlet rendszer, és ha az adott motor adatai alapján felvesszük a helyes peremfeltételeket, paramétereket, máris ezen matematikai modell kapcsán vizsgálható az átviteli függvénye a különböző gerjesztő, vizsgáló jelek kapcsán. Csakhogy rengeteg az ismeretlen, és így pontos adat nélkül a modell megoldási futtatási eredménye biztosan nem lesz megfelelő pontosságú.
Ezért alakult ki nálam ez a mérőrendszer, mert itt minden azonnal, és gyorsan kiderül, hiszen a mérési folyamat algortimusa alkalmazkodik a motor modellhez, az értékeléskor, diagram szerkesztéskor pedig a valós, nagy pontosságú mérési paraméterek kerülnek behelyettesítésre. A dos pedig "bivaly erős" mérési képességeket (ezért imádom, mert csicsa helyett a lényegen dolgozik) ad a speciális gyors mérési algortimusaimhoz, ami azt jeleneti a gyakorlatban, hogy egy régi P3 800 MHz alaplappal is LPT porton szoftverből megvan a max. 5 MHz-es step-dir küldés lehetősége, és a max. 500 KHz-es input feldolgozási sebesség, P4-nél ez már a duplája.
A rezonancia leghatékonyabb, legegyszerűbb csökkentési módja az egész lépés hanyagolása, és a microstep alkalmazása. Azonban ennek is ára van, a nyomaték kisebb lesz, és az egész lépések közti mágneses mező pozíció és linearitási hibája motor konstrukciótól, vezérlő elektronikától nagyban függővé válik.
Ezért alakult ki nálam ez a mérőrendszer, mert itt minden azonnal, és gyorsan kiderül, hiszen a mérési folyamat algortimusa alkalmazkodik a motor modellhez, az értékeléskor, diagram szerkesztéskor pedig a valós, nagy pontosságú mérési paraméterek kerülnek behelyettesítésre. A dos pedig "bivaly erős" mérési képességeket (ezért imádom, mert csicsa helyett a lényegen dolgozik) ad a speciális gyors mérési algortimusaimhoz, ami azt jeleneti a gyakorlatban, hogy egy régi P3 800 MHz alaplappal is LPT porton szoftverből megvan a max. 5 MHz-es step-dir küldés lehetősége, és a max. 500 KHz-es input feldolgozási sebesség, P4-nél ez már a duplája.
A rezonancia leghatékonyabb, legegyszerűbb csökkentési módja az egész lépés hanyagolása, és a microstep alkalmazása. Azonban ennek is ára van, a nyomaték kisebb lesz, és az egész lépések közti mágneses mező pozíció és linearitási hibája motor konstrukciótól, vezérlő elektronikától nagyban függővé válik.
Cím: Re:Léptetőmotor
Írta: zt2c4wh9 Dátum 2017 szeptember 19, 16:35
Írta: zt2c4wh9 Dátum 2017 szeptember 19, 16:35
Vannak ilyen vezérlők, sőt, a kínai "DSP" vagy "digitális" vezérlőknek nevezettek nem a régen megszokott egyszerű chopperes áram szabályzással működnek, hanem PI áramszabályzókkal.
Vagyis nem egyszerűen egy referenciafeszültséghez komparálják a mért áramot, hanem PI szabályzóhurokkal szabályozzák a motor fázisáramait.
A rezonancia csökkentésére vannak trükkök, pl. a szabályzóhurok pólusainak eltolása adott frekvenciatartományban. Ezek némely vezérlőkben állíthatók is egyszerűbb vagy bonyolultabb módon.
Éppen ezért egy ilyen mérés nem igazán azt mutatja meg, hogy milyen "jó" a motor, sőt még azt sem hogy milyen "jó" a vezérlő, hanem hogy a kettő együtt mennyire jól tud együtt működni adott környezetben.
Vagyis nem egyszerűen egy referenciafeszültséghez komparálják a mért áramot, hanem PI szabályzóhurokkal szabályozzák a motor fázisáramait.
A rezonancia csökkentésére vannak trükkök, pl. a szabályzóhurok pólusainak eltolása adott frekvenciatartományban. Ezek némely vezérlőkben állíthatók is egyszerűbb vagy bonyolultabb módon.
Éppen ezért egy ilyen mérés nem igazán azt mutatja meg, hogy milyen "jó" a motor, sőt még azt sem hogy milyen "jó" a vezérlő, hanem hogy a kettő együtt mennyire jól tud együtt működni adott környezetben.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 19, 17:24
Írta: 000000000 Dátum 2017 szeptember 19, 17:24
"Éppen ezért egy ilyen mérés nem igazán azt mutatja meg, hogy milyen "jó" a motor, sőt még azt sem hogy milyen "jó" a vezérlő, hanem hogy a kettő együtt mennyire jól tud együtt működni adott környezetben."
Ezt a kijelentésedet vitatnám a több ezer mérési adat, eredményem, tapasztalatom kapcsán. Nagyon is nagy eltérések vannak a különböző léptetőmotor vezérlők között, ha azonos motoron teszteljük, és fordítva is nagyok a minőségi eltérések, azaz ha egy vezérlőt tesztelek sokféle motorral. Így aztán ezeket a mérési eredményeket összevetve egy koordináterendszerben azonnal eldönthető, mi a nyerő hajtás, és motor kategória.
Pont ezen felismerés alapján van az, hogy a komolyabb gyártóknak komplett hajtás láncai vannak, azaz lefedik nem csak a motor/motorvezérlő párost, hanem még a harmadik elemet is a CNC vezérlőprogramot is. Sajnos a hajtástechnika már csak egy ilyen világ, minden összefügg mindennel.
Ezt a kijelentésedet vitatnám a több ezer mérési adat, eredményem, tapasztalatom kapcsán. Nagyon is nagy eltérések vannak a különböző léptetőmotor vezérlők között, ha azonos motoron teszteljük, és fordítva is nagyok a minőségi eltérések, azaz ha egy vezérlőt tesztelek sokféle motorral. Így aztán ezeket a mérési eredményeket összevetve egy koordináterendszerben azonnal eldönthető, mi a nyerő hajtás, és motor kategória.
Pont ezen felismerés alapján van az, hogy a komolyabb gyártóknak komplett hajtás láncai vannak, azaz lefedik nem csak a motor/motorvezérlő párost, hanem még a harmadik elemet is a CNC vezérlőprogramot is. Sajnos a hajtástechnika már csak egy ilyen világ, minden összefügg mindennel.
Cím: Re:Léptetőmotor
Írta: zt2c4wh9 Dátum 2017 szeptember 19, 17:58
Írta: zt2c4wh9 Dátum 2017 szeptember 19, 17:58
Úgy látom valami nem változott, még mindig szöveg értelmezési problémáid vannak.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 19, 18:11
Írta: 000000000 Dátum 2017 szeptember 19, 18:11
Köszönöm. Én már csak ilyen hülye idióta vagyok szerinted, te meg a szakmai zseni.[#lookaround]
Ahogy Svejk szokta mondani "ugorgyunk"!
Ahogy Svejk szokta mondani "ugorgyunk"!
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2017 szeptember 19, 18:15
Írta: ANTAL GÁBOR Dátum 2017 szeptember 19, 18:15
Érdekes lenne egy MSDD( digitális) vezérlőt és egy ( mondjuk 2-3 Nm es ) motort( akár szabad tengelyvéggel ) tesztelni a Robsy measuring system -mel ( bőven a mikrolépéses tartományban!!) úgy hogy előbb lefuttatjuk az autotuningot .
Szerintem a fórum közönsége ( beleértve a Klavió KFT- t is) bőven összedobná a méréshez szükséges eszközöket.
Szerintem a fórum közönsége ( beleértve a Klavió KFT- t is) bőven összedobná a méréshez szükséges eszközöket.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 19, 18:34
Írta: 000000000 Dátum 2017 szeptember 19, 18:34
Biztos olvassa a Klavio Kft. szakembere is az írásodat, részemről semmi akadálya. Egyeztetett időpontban elmegyek Hozzájuk, és egy félóra-óra alatt lezavarjuk ezeket a méréseket. Sőt még egy 3 fázisú enkóderes visszacsatolású léptetős hajtást is megnézhetünk, netán egy AC szervót, mert még az a meglepetés is érhet minket, hogy egy jobb fajta léptetős hajtás leveri az AC szervót pozíció követésben, dinamikában.:)
Cím: Re:Léptetőmotor
Írta: Dakota25 Dátum 2017 szeptember 19, 18:42
Írta: Dakota25 Dátum 2017 szeptember 19, 18:42
:-)) Olyan vezérlő szerintem nincs, amilyet írtam, ami a "következő lépésre optimalizál":-) - pici beépített időgéppel tudná megtenni.
Bocs, csak vicc! - Nyilván két szomszédos lépés hasonló lesz egymáshoz, a pici változásokból a PI hurok+SW "megsejti" a közeljövőt.
Miből következtetnek a mai csúcs vezérlők az adott lépés lefutási jellemzőire? Másképpen: Honnan veszik a hibajelet?
A pólusfeszültség a forrás?
Bocs, csak vicc! - Nyilván két szomszédos lépés hasonló lesz egymáshoz, a pici változásokból a PI hurok+SW "megsejti" a közeljövőt.
Miből következtetnek a mai csúcs vezérlők az adott lépés lefutási jellemzőire? Másképpen: Honnan veszik a hibajelet?
A pólusfeszültség a forrás?
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2017 szeptember 19, 18:44
Írta: ANTAL GÁBOR Dátum 2017 szeptember 19, 18:44
Sikerélményben részesítettel . Ez a beszéd ! Végre
( borítékolom hogy rengeteg embert érint és komoly gyakorlati jelentőséggel bír )
Holnap hívom a Klaviót
De biztos más is olvassa amit javasolok .. kis szerencsével még egy jó tali bemutató is kikerekedhetne belőle
( borítékolom hogy rengeteg embert érint és komoly gyakorlati jelentőséggel bír )
Holnap hívom a Klaviót
De biztos más is olvassa amit javasolok .. kis szerencsével még egy jó tali bemutató is kikerekedhetne belőle
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 szeptember 19, 19:22
Írta: svejk Dátum 2017 szeptember 19, 19:22
Valószínűleg a Back EMF van kiértékelve....
Az előző lépések lecsengése alapján lehet korrigálni.
Az előző lépések lecsengése alapján lehet korrigálni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 19, 20:40
Írta: 000000000 Dátum 2017 szeptember 19, 20:40
A Leadshine AM vezérlők pedig tudnak lépésvesztés detektálni encoder nélkül !
Sőt erre van kimenete is amivel például le tudja állítani a Mach3 vezérlő programot !
Sőt erre van kimenete is amivel például le tudja állítani a Mach3 vezérlő programot !
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 19, 20:43
Írta: 000000000 Dátum 2017 szeptember 19, 20:43
[5511] számú hozászolásomban ott van kerek perec, szkópon is látható a hiba
Cím: Re:Léptetőmotor
Írta: klaviokft Dátum 2017 szeptember 20, 12:12
Írta: klaviokft Dátum 2017 szeptember 20, 12:12
Antal Gáborral egyeztetve, a Klavio tud díjmentesen biztosítani a teszteléshez szükséges motort, vezérlőt.
Robsy egyeztessünk emailben, vagy telefonon.
Robsy egyeztessünk emailben, vagy telefonon.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2017 szeptember 20, 21:06
Írta: s7manbs8 Dátum 2017 szeptember 20, 21:06
A távcsöveknél is van iylen bemérés interferométerrel, ott is amelyik be van mérve többért is lehet majd adni, van róla papír. :) (hogy tényleg mozog)
Cím: Re:Léptetőmotor
Írta: Dakota25 Dátum 2017 szeptember 21, 10:02
Írta: Dakota25 Dátum 2017 szeptember 21, 10:02
Rendkívül érdekes lenne egy hirtelen változó terhelőnyomaték mellett elcsípni a mérésben olyan szakaszt, amikor a fejlett vezérlő kompenzálja a terhelésváltozást.
Cím: Re:Léptetőmotor
Írta: iv43r83d Dátum 2017 szeptember 24, 19:22
Írta: iv43r83d Dátum 2017 szeptember 24, 19:22
Sziasztok! A képen lévő léptetőmotorhoz milyen vezérlő lenne jó?[#nemtudom] A válaszokat előre is köszönöm!
Üdv Csaba!
Üdv Csaba!
Cím: Re:Léptetőmotor
Írta: iv43r83d Dátum 2017 szeptember 24, 19:23
Írta: iv43r83d Dátum 2017 szeptember 24, 19:23
Pics a kép lemaradt!
(http://www.imgserv.com/images/2017/09/24/iKV51W.jpg)
(http://www.imgserv.com/images/2017/09/24/iKV51W.jpg)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 24, 20:57
Írta: 000000000 Dátum 2017 szeptember 24, 20:57
Ezekhez ilyen vezérlő volt.
A vezérlő nagy rákfenéje, hogy a nyák szó szerint elpárolog a csatlakozó alatt a kis áramok miatt és utána már lépést veszt és egyéb nyalánkságok.
Hunka Tibor tudna erről mesélni.
(https://www.lektronix.net/images/equipment/Pacific-Scientific-6410-001-N-N-N.jpg)
A vezérlő nagy rákfenéje, hogy a nyák szó szerint elpárolog a csatlakozó alatt a kis áramok miatt és utána már lépést veszt és egyéb nyalánkságok.
Hunka Tibor tudna erről mesélni.
(https://www.lektronix.net/images/equipment/Pacific-Scientific-6410-001-N-N-N.jpg)
Cím: Re:Léptetőmotor
Írta: iv43r83d Dátum 2017 szeptember 24, 21:45
Írta: iv43r83d Dátum 2017 szeptember 24, 21:45
Köszi a képet és a választ!Megvan a vezérlője de nem biztos hogy össze lehet kötni számítógéppel holnap lefotózom!Ezért érdeklődtem!
Üdv Csaba!
Üdv Csaba!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 24, 21:51
Írta: 000000000 Dátum 2017 szeptember 24, 21:51
Alábbi vezérlő Mach3-al megy.
Cím: Re:Léptetőmotor
Írta: iv43r83d Dátum 2017 szeptember 25, 20:27
Írta: iv43r83d Dátum 2017 szeptember 25, 20:27
Sziasztok!Elvileg a tegnap felrakott léptetőmotornak ez a vezérlője!Kérdésem a következő!Lehet e számítógéppel használni és ha igen esetleg a bekötése?
Üdv Csaba!
(http://www.imgserv.com/images/2017/09/25/0tvGaRQA.jpg)
(http://www.imgserv.com/images/2017/09/25/mYa6t.jpg)
(http://www.imgserv.com/images/2017/09/25/oKGRXV.jpg)
Üdv Csaba!
(http://www.imgserv.com/images/2017/09/25/0tvGaRQA.jpg)
(http://www.imgserv.com/images/2017/09/25/mYa6t.jpg)
(http://www.imgserv.com/images/2017/09/25/oKGRXV.jpg)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 25, 21:24
Írta: 000000000 Dátum 2017 szeptember 25, 21:24
Nézz bele a lelki világába mélyebben és L297-es IC keress.
Esetleg ha találsz benne ilyet akkor biztos tud step dir-t
A 4 darab L6203 arra enged következtetni, ez 8 Amper fázisáramot tud mivel ez az IC-t DC motor diver-nek használják (Full Bridge Driver)
Léptetőhöz 1 pár kell és így tud max 4 ampert. (két pár dupla áram)
Amúgy fél lépésnél többet ne várj tőle ha L297 a vezérlője.
Viszont nem hiszem ez Pacific Scientific vezérlő lenne. (ezt a típust más gyártó preferálta)
Esetleg ha találsz benne ilyet akkor biztos tud step dir-t
A 4 darab L6203 arra enged következtetni, ez 8 Amper fázisáramot tud mivel ez az IC-t DC motor diver-nek használják (Full Bridge Driver)
Léptetőhöz 1 pár kell és így tud max 4 ampert. (két pár dupla áram)
Amúgy fél lépésnél többet ne várj tőle ha L297 a vezérlője.
Viszont nem hiszem ez Pacific Scientific vezérlő lenne. (ezt a típust más gyártó preferálta)
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2017 szeptember 25, 21:41
Írta: jani300 Dátum 2017 szeptember 25, 21:41
Régebben én is zavarogtam itt, hasonló vezérlővel .
Abban is négy végfok van , de két léptetőt visz .
Az l297 benne van . két darab .
Én sem találtam rendes doksit a vezérlőről , de már lényegtelen is . De tanultam azért míg kibogarásztam valamennyire a működését , arra jó volt .
A kép ilyen , csak nagyjából ,hogy miről dumálok :)
(https://hobbicncforum.hu/uploaded_images/2017/09/tn_gipkuqwki8cs9indpy69_2430.png) (https://hobbicncforum.hu/uploaded_images/2017/09/gipkuqwki8cs9indpy69_2430.png)
Abban is négy végfok van , de két léptetőt visz .
Az l297 benne van . két darab .
Én sem találtam rendes doksit a vezérlőről , de már lényegtelen is . De tanultam azért míg kibogarásztam valamennyire a működését , arra jó volt .
A kép ilyen , csak nagyjából ,hogy miről dumálok :)
(https://hobbicncforum.hu/uploaded_images/2017/09/tn_gipkuqwki8cs9indpy69_2430.png) (https://hobbicncforum.hu/uploaded_images/2017/09/gipkuqwki8cs9indpy69_2430.png)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 25, 21:51
Írta: 000000000 Dátum 2017 szeptember 25, 21:51
Haver épített ilyen dupla L298-as L297 meghajtós cuccot, majd elajándékozom azt is.
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2017 szeptember 25, 21:59
Írta: jani300 Dátum 2017 szeptember 25, 21:59
A képen az 6203 okkal megy .
De festékköpőből vadásztam ki L298 ast is , motorral .
Azok is frankó ipari cuccok , csak már értéktelenek .
Elfüstöltetni azért azok nem fájtak volna annyira :)
Sok butát kérdeztem , de tanultam , az is valami ...
De festékköpőből vadásztam ki L298 ast is , motorral .
Azok is frankó ipari cuccok , csak már értéktelenek .
Elfüstöltetni azért azok nem fájtak volna annyira :)
Sok butát kérdeztem , de tanultam , az is valami ...
Cím: Re:Léptetőmotor
Írta: iv43r83d Dátum 2017 szeptember 25, 22:00
Írta: iv43r83d Dátum 2017 szeptember 25, 22:00
Sajna az elektronikához nem nagyon értek de holnap megnézem és jelentkezem!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 25, 22:02
Írta: 000000000 Dátum 2017 szeptember 25, 22:02
Ha a vezérlő típusát írnád meg akkor utána lehetne nézni mi is ez.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 25, 23:05
Írta: 000000000 Dátum 2017 szeptember 25, 23:05
Régi Isel vezérlők is ilyen felépítésűek. L6203 / L297
Az alábbi képen már egy újabb verzió látható, de a régi is így néz ki.
Mondjuk ezekből az Isel-es vezérlőkből is alakítottam át párat Mach3-ra.
(http://www.isel.com/media/catalog/product/cache/55/image/9df78eab33525d08d6e5fb8d27136e95/3/1/316301_1.jpg)
Az alábbi képen már egy újabb verzió látható, de a régi is így néz ki.
Mondjuk ezekből az Isel-es vezérlőkből is alakítottam át párat Mach3-ra.
(http://www.isel.com/media/catalog/product/cache/55/image/9df78eab33525d08d6e5fb8d27136e95/3/1/316301_1.jpg)
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2017 szeptember 26, 00:25
Írta: jani300 Dátum 2017 szeptember 26, 00:25
Nos ,mondhattátok volna pár éve is .
ISNC LK1/2-B a panel kódja , E. GEENEN ELECTRONIK.
Ez csak a végfok , a léptető meghajtó .
Magát a kártya részt , később megnézem .
Lényegtelen , de kíváncsi vagyok .
ISNC LK1/2-B a panel kódja , E. GEENEN ELECTRONIK.
Ez csak a végfok , a léptető meghajtó .
Magát a kártya részt , később megnézem .
Lényegtelen , de kíváncsi vagyok .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 26, 09:35
Írta: 000000000 Dátum 2017 szeptember 26, 09:35
Ez maga a léptetőmotor meghajtó, ehhez a megfelelő pinekre rá kell kötni egy 1200-1500 Forintos IO kártyát és működik !
A régebbi vezérlőknél a Step pulse értéket 15-re kellet tenni és invertálni a kimenetet és már működött is !
De eléggé fapados ez a féllépéses szanaszét rezonálós vezérlő.
Kezdésre elmegy, de mint tudjuk mindenki rendőrnek születik, de vannak akik tovább képzik magukat !
Tehát mint írtam kezdésre elmegy, de még egy Leadshine M széria is megeszi reggelire, rezonancia terén mint hangban és sebességben is!
A DM vagy AM szériák meg fényévekkel rávernek mindenben !
Nem véletlen az Isel honlapján sem található meg a régi vezérlő.
A régebbi vezérlőknél a Step pulse értéket 15-re kellet tenni és invertálni a kimenetet és már működött is !
De eléggé fapados ez a féllépéses szanaszét rezonálós vezérlő.
Kezdésre elmegy, de mint tudjuk mindenki rendőrnek születik, de vannak akik tovább képzik magukat !
Tehát mint írtam kezdésre elmegy, de még egy Leadshine M széria is megeszi reggelire, rezonancia terén mint hangban és sebességben is!
A DM vagy AM szériák meg fényévekkel rávernek mindenben !
Nem véletlen az Isel honlapján sem található meg a régi vezérlő.
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2017 szeptember 26, 10:55
Írta: jani300 Dátum 2017 szeptember 26, 10:55
Kezdésre elmegy, de mint tudjuk mindenki rendőrnek születik, de vannak akik tovább képzik magukat !
Köszi ! :)
Kibogarásztam én a bekötést , de ebből már csak dísz lesz ... Nemrég vettem itt egy dq860ma t , majd ha nagy hó lesz megnézem mire megyek vele .
Az hogy a régit törlik ,nekem kicsit parasztságnak tűnik ,
technika történet ,mi avval a baj ?
Ennyi erővel büntethetnék azt is hogy aljas módon használni merészelünk akár 100 éves gépeket is .
A helyi autóklubból jöttem épen . Láttam 6kerekű tréleren két öreg "rosszt" . Most akkor azok miért érnek 10 millákat ?
Köszi ! :)
Kibogarásztam én a bekötést , de ebből már csak dísz lesz ... Nemrég vettem itt egy dq860ma t , majd ha nagy hó lesz megnézem mire megyek vele .
Az hogy a régit törlik ,nekem kicsit parasztságnak tűnik ,
technika történet ,mi avval a baj ?
Ennyi erővel büntethetnék azt is hogy aljas módon használni merészelünk akár 100 éves gépeket is .
A helyi autóklubból jöttem épen . Láttam 6kerekű tréleren két öreg "rosszt" . Most akkor azok miért érnek 10 millákat ?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 26, 11:04
Írta: 000000000 Dátum 2017 szeptember 26, 11:04
A DQ860MA a kinai Leadshine kinai koppintása [#hehe]
A Leadshine M szériával egyenlő tudású vezérlő.
Tartóssága számomra még ismeretlen, de majd beszámolsz róla. [#papakacsint]
A Leadshine M szériával egyenlő tudású vezérlő.
Tartóssága számomra még ismeretlen, de majd beszámolsz róla. [#papakacsint]
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2017 szeptember 26, 11:11
Írta: jani300 Dátum 2017 szeptember 26, 11:11
Utána néztem már , nem digitális ?
Hátaztán ... Szerintem pár nappal előtte buktam legalább 15 öt máson . Azé még itt vagyok ... :)[#integet2]
Hátaztán ... Szerintem pár nappal előtte buktam legalább 15 öt máson . Azé még itt vagyok ... :)[#integet2]
Cím: Re:Léptetőmotor
Írta: iv43r83d Dátum 2017 szeptember 26, 12:08
Írta: iv43r83d Dátum 2017 szeptember 26, 12:08
Sziasztok! leszereltem a hűtőbordát és ezt látni!Van benne L 297 IC!A panelon :SECHRIST PART NO.30013 ASYY NO. 25009
(http://www.imgserv.com/images/2017/09/26/qLadGvSTn.jpg)
(http://www.imgserv.com/images/2017/09/26/qLadGvSTn.jpg)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 26, 13:18
Írta: 000000000 Dátum 2017 szeptember 26, 13:18
Az L297 IC sajnos nem tud igazi fél lépést (az áramgenerátora mindig csak a beállított egyféle áramra képes (féllépésnél ugyebár kétféle kellene), emiatt nagy alapból a pozíció linearitási hibája. Lehetőleg ne bajlódjál ezzel a vezérlővel, egy kis vacak DRV8825 vagy TBxxxx vezérlőt használj helyette. Ha pedig sok pénzed van, MSDX és társai.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 26, 13:29
Írta: 000000000 Dátum 2017 szeptember 26, 13:29
Ma délelőtt voltam a Klavio Kft-nél, és 3 féle léptető motoros hajtást teszteltünk.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2017 szeptember 26, 13:52
Írta: svejk Dátum 2017 szeptember 26, 13:52
Nagyszerű!
Végre egy vita ami Happyenddel zárulhat, mindenki jól jár, főleg a fórumolvasók.
Végre egy vita ami Happyenddel zárulhat, mindenki jól jár, főleg a fórumolvasók.
Cím: Re:Léptetőmotor
Írta: fn47xk7ei Dátum 2017 szeptember 26, 14:44
Írta: fn47xk7ei Dátum 2017 szeptember 26, 14:44
Örülök én is ![#eljen]
Cím: Re:Léptetőmotor
Írta: iv43r83d Dátum 2017 szeptember 26, 15:27
Írta: iv43r83d Dátum 2017 szeptember 26, 15:27
Szép napot Tibor! Az IC cserével lehetne használni?Már ha megvan jó lenne használni és nem másikat venni!
Cím: Re:Léptetőmotor
Írta: klaviokft Dátum 2017 szeptember 26, 16:32
Írta: klaviokft Dátum 2017 szeptember 26, 16:32
Kettőről született is kép.
(https://hobbicncforum.hu/uploaded_images/2017/09/tn_2d7ic2bc747gp82gzukz_5432.jpg) (https://hobbicncforum.hu/uploaded_images/2017/09/2d7ic2bc747gp82gzukz_5432.jpg) (https://hobbicncforum.hu/uploaded_images/2017/09/tn_npsvjukqhzyv63pkschf_5432.jpg) (https://hobbicncforum.hu/uploaded_images/2017/09/npsvjukqhzyv63pkschf_5432.jpg)
(https://hobbicncforum.hu/uploaded_images/2017/09/tn_2d7ic2bc747gp82gzukz_5432.jpg) (https://hobbicncforum.hu/uploaded_images/2017/09/2d7ic2bc747gp82gzukz_5432.jpg) (https://hobbicncforum.hu/uploaded_images/2017/09/tn_npsvjukqhzyv63pkschf_5432.jpg) (https://hobbicncforum.hu/uploaded_images/2017/09/npsvjukqhzyv63pkschf_5432.jpg)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 26, 20:05
Írta: 000000000 Dátum 2017 szeptember 26, 20:05
Az első képen látható digitális stepmotor vezérlő mérési eredményei 4 különböző fordulatszámon bemérve:
(http://www.robsy.hu/te2/robsy-motortest301.gif)
Ez a diagram sereg a három különböző motorvezérlő összevetését mutatja azonos fordulaton:
(http://www.robsy.hu/te2/robsy-motortest302.gif)
(http://www.robsy.hu/te2/robsy-motortest301.gif)
Ez a diagram sereg a három különböző motorvezérlő összevetését mutatja azonos fordulaton:
(http://www.robsy.hu/te2/robsy-motortest302.gif)
Cím: Re:Léptetőmotor
Írta: svager Dátum 2017 szeptember 26, 20:28
Írta: svager Dátum 2017 szeptember 26, 20:28
Ha elvinnék Fehérvárra egy ilyen (https://webaruhaz.klavio.hu/pictures/f2514_xl-85b75cfc564c4822863dbd4884138991.jpg) motort és egy vezérlőt,ott be tudnád mérni?
Csak kíváncsiságból,mert ha nem olyan jó akkor is ez marad [#vigyor5]
Egyébként mi kell még a méréshez valami táp meg,hogy összekösd az encoderrel?
Csak kíváncsiságból,mert ha nem olyan jó akkor is ez marad [#vigyor5]
Egyébként mi kell még a méréshez valami táp meg,hogy összekösd az encoderrel?
Cím: Re:Léptetőmotor
Írta: svager Dátum 2017 szeptember 26, 20:29
Írta: svager Dátum 2017 szeptember 26, 20:29
A link talán most jó (https://webaruhaz.klavio.hu/?id=85b75cfc564c4822863dbd4884138991&p=termeklap&tkod=67)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 26, 20:54
Írta: 000000000 Dátum 2017 szeptember 26, 20:54
Ha hozod a motort és a vezérlőt is hozzá, meg a hozzávaló tápegységet, akkor megoldjuk a bemérést. A teszt step jeleket a Robsy mérőrendszer adja a léptetőmotor vezérlő optós bemenetére, a motortengelyt pedig mechanikusan összekötjük a mérőpad enkóderével (lásd fotó).
Ezeket a méréseket másoknak is felajánlom a fehérvári találkozón.
Így ha valakit még érdekel egy adott léptetőmotoros hajtásának pozíció dinamikai bemérése, pályakövetési minősége (elsősorban Nema 17, 23 kategóriában), akkor a fentiekben említett hajtáselemeit hozza el, és keressen meg.
Ezeket a méréseket másoknak is felajánlom a fehérvári találkozón.
Így ha valakit még érdekel egy adott léptetőmotoros hajtásának pozíció dinamikai bemérése, pályakövetési minősége (elsősorban Nema 17, 23 kategóriában), akkor a fentiekben említett hajtáselemeit hozza el, és keressen meg.
Cím: Re:Léptetőmotor
Írta: svager Dátum 2017 szeptember 26, 21:16
Írta: svager Dátum 2017 szeptember 26, 21:16
Köszönöm!
Rendben viszek egy tápot is,a tengely összekötésen azon még gondolkodom mert nincs 14-es tengelykapcsolóm.
Rendben viszek egy tápot is,a tengely összekötésen azon még gondolkodom mert nincs 14-es tengelykapcsolóm.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 26, 21:34
Írta: 000000000 Dátum 2017 szeptember 26, 21:34
Nem kell kuplung, annak nagyobb J-je lenne (torzítaná az üresjárati mérést), megoldjuk helyette "szigszalagos" tengelykapcsolóval.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2017 szeptember 26, 21:41
Írta: ANTAL GÁBOR Dátum 2017 szeptember 26, 21:41
Örülök hogy sikerült összehozni a dolgot . Nekem szembeötlő a mikroléptetés jótékony hatása . Az amatőr mechanikákat figyelembe véve azt hiszem a szögeltérésből adódó hiba elhanyagolható.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 szeptember 26, 21:51
Írta: 000000000 Dátum 2017 szeptember 26, 21:51
Igen, jól látható, hogy ezek a vezérlők nem véletlenül drágábbak, hiszen a tudásuk, minőségük is jobbak. A rezonancia szűrés a digitiális meghajtóknál elég hatékony, az encoderes visszacsatolású Easy Servo (IST-2320) pedig a legjobban igyekszik "tapadni", és követi a 45 fokos ideális egyenest a három "versenyző" közül.
Cím: Re:Léptetőmotor
Írta: wvdn6us49 Dátum 2017 szeptember 26, 21:58
Írta: wvdn6us49 Dátum 2017 szeptember 26, 21:58
Sziasztok!
Tud esetleg valaki egy leírást (bekötés) küldeni erről a vezérlőről:
Pico drive (https://www.cncpart.hu/elektronika/motorvezerlo/picodrive-leptetomotor-vezerlo)
Köszi előre is!
Tud esetleg valaki egy leírást (bekötés) küldeni erről a vezérlőről:
Pico drive (https://www.cncpart.hu/elektronika/motorvezerlo/picodrive-leptetomotor-vezerlo)
Köszi előre is!
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2017 szeptember 26, 22:02
Írta: s5f8tmfv3 Dátum 2017 szeptember 26, 22:02
Ott van a kép alatt.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2017 szeptember 26, 22:03
Írta: PSoft Dátum 2017 szeptember 26, 22:03
Ha oda klikkelnél a kép alá...
Pico Drive leírás... (https://www.cncpart.hu/custom/cncpart/image/data/srattached/e232092438982bfdf60f3f1a1a0a8f02_Pico_Drive_Manual_1v2.pdf)
Pico Drive leírás... (https://www.cncpart.hu/custom/cncpart/image/data/srattached/e232092438982bfdf60f3f1a1a0a8f02_Pico_Drive_Manual_1v2.pdf)
Cím: Re:Léptetőmotor
Írta: wvdn6us49 Dátum 2017 szeptember 26, 22:05
Írta: wvdn6us49 Dátum 2017 szeptember 26, 22:05
Köszi! Mit kerestem, de nem látom a fától az erdőt [#vigyor3]
Cím: Re:Léptetőmotor
Írta: prinx Dátum 2017 szeptember 28, 18:35
Írta: prinx Dátum 2017 szeptember 28, 18:35
Üdv mindenkinek segítséget szeretnék kérni az alábbi léptetővel kapcsolatban :
Sanyo Denki 103H7123-1745
Nem találok erről a típusról információkat, hasonlóakat találok csak a fázisonkénti áram nem stimmel
Ez a léptető 4A.
Segítségeteket előre is köszönöm.
Üdv H.Attila
(https://hobbicncforum.hu/uploaded_images/2017/09/tn_kt0nqaa00p9e0m6cqtmi_4870.jpg) (https://hobbicncforum.hu/uploaded_images/2017/09/kt0nqaa00p9e0m6cqtmi_4870.jpg)
Sanyo Denki 103H7123-1745
Nem találok erről a típusról információkat, hasonlóakat találok csak a fázisonkénti áram nem stimmel
Ez a léptető 4A.
Segítségeteket előre is köszönöm.
Üdv H.Attila
(https://hobbicncforum.hu/uploaded_images/2017/09/tn_kt0nqaa00p9e0m6cqtmi_4870.jpg) (https://hobbicncforum.hu/uploaded_images/2017/09/kt0nqaa00p9e0m6cqtmi_4870.jpg)
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2017 szeptember 28, 21:24
Írta: zozo Dátum 2017 szeptember 28, 21:24
Hát, ha a feszültség érdekel, sztem ellenállást kéne mérni és abból már számíthatod.
Cím: Re:Léptetőmotor
Írta: vadember Dátum 2017 szeptember 29, 06:08
Írta: vadember Dátum 2017 szeptember 29, 06:08
Megmondaná valaki, hogy milyen értéket javít ebben a videóban a kondenzátor beforrasztásával a TB6560-as vezérlőn az illető?AHQ (https://www.youtube.com/watch?v=XJKodmZihbk)
Cím: Re:Léptetőmotor
Írta: fa4igtzhp Dátum 2017 szeptember 29, 13:49
Írta: fa4igtzhp Dátum 2017 szeptember 29, 13:49
Hello,
http://www.kosmodrom.com.ua/data/cncstepdriver/TB6560AHQ.pdf
Pin6 GND, Pin7 Osc
Page 10: 8 Chapter alatt vannak az ertekek.
Az adatlap szerint ide egy kondenzatort kell kotni es az erteknek megfeleloen bizonyos frekivel osszcillal majd. A videoban szerintem a srac ezt a kondit csereli ki mivel szerinte nem jo.
http://www.kosmodrom.com.ua/data/cncstepdriver/TB6560AHQ.pdf
Pin6 GND, Pin7 Osc
Page 10: 8 Chapter alatt vannak az ertekek.
Az adatlap szerint ide egy kondenzatort kell kotni es az erteknek megfeleloen bizonyos frekivel osszcillal majd. A videoban szerintem a srac ezt a kondit csereli ki mivel szerinte nem jo.
Cím: Re:Léptetőmotor
Írta: prinx Dátum 2017 szeptember 29, 19:21
Írta: prinx Dátum 2017 szeptember 29, 19:21
Üdv nem a feszültség érdekelne hanem a nyomaték és a rögzítő furatai. Vennékilyen motort és ezért kérdeztem, hogy valaki nem tud valami infót az adott léptetőről. Ha a nyomatéka valamivel nagyobb lenne és stimmel a nema 23 szabvány rögzítő furataival akkor vennék ilyeneket. Azért köszönöm szépen a válaszát
Cím: Re:Léptetőmotor
Írta: morfeus Dátum 2017 október 02, 12:54
Írta: morfeus Dátum 2017 október 02, 12:54
Sziasztok!
Az lenne a kérdésem,hogy mi a véleményetek, tapasztalatok a képen látható vezérlőről?
Jelenleg ezekkel tudom megoldani a 3tengely vezérlését plusz egy ETH400 kártya!
Az lenne még a kérdésem,hogy van okyan aki tud segíteni ha elakadok a bekötésben?
Tudom több rajz is van,de az ördög nem alszik :)
Előre is köszönöm a válaszokat!
(https://hobbicncforum.hu/uploaded_images/2017/10/tn_eis24widsedsakk58ua0b_3384.jpg) (https://hobbicncforum.hu/uploaded_images/2017/10/eis24widsedsakk58ua0b_3384.jpg)
Az lenne a kérdésem,hogy mi a véleményetek, tapasztalatok a képen látható vezérlőről?
Jelenleg ezekkel tudom megoldani a 3tengely vezérlését plusz egy ETH400 kártya!
Az lenne még a kérdésem,hogy van okyan aki tud segíteni ha elakadok a bekötésben?
Tudom több rajz is van,de az ördög nem alszik :)
Előre is köszönöm a válaszokat!
(https://hobbicncforum.hu/uploaded_images/2017/10/tn_eis24widsedsakk58ua0b_3384.jpg) (https://hobbicncforum.hu/uploaded_images/2017/10/eis24widsedsakk58ua0b_3384.jpg)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 október 02, 13:16
Írta: 000000000 Dátum 2017 október 02, 13:16
TB6600-ra épülő kinai katyvasz !
Például nálam ebből bekapcsolás követően 2 azonnal hívta a indiánokat, egy meg némi forgás után dobta a füstjeleket.
Japán Kenwood labor tápról voltak próbálva ! (mindössze 24 voltról)
Tehát ettől jobb és kisebb zajú maximum akkumról lehetett volna.
Leadshine M542-vel nem lehet mellé fogni ha ebben a feszültség és áram értékben gondolkozol !
Például nálam ebből bekapcsolás követően 2 azonnal hívta a indiánokat, egy meg némi forgás után dobta a füstjeleket.
Japán Kenwood labor tápról voltak próbálva ! (mindössze 24 voltról)
Tehát ettől jobb és kisebb zajú maximum akkumról lehetett volna.
Leadshine M542-vel nem lehet mellé fogni ha ebben a feszültség és áram értékben gondolkozol !
Cím: Re:Léptetőmotor
Írta: morfeus Dátum 2017 október 02, 13:39
Írta: morfeus Dátum 2017 október 02, 13:39
Köszönöm válaszodat!
Meglátjuk mi lesz ,mindenképpen jelentkezem!
Meglátjuk mi lesz ,mindenképpen jelentkezem!
Cím: Re:Léptetőmotor
Írta: istvan3 Dátum 2017 október 02, 13:44
Írta: istvan3 Dátum 2017 október 02, 13:44
Én nagyon tudom ajánlatni a DM542 típusú vezérlőket. 3 vezérlő németből ebayen, breakout boarddal, és kábellel 30000Ft körül itt van.
Többet használok évek óta, nagyon jól működnek. Gyorsak vele a motorok, és halkak.
Többet használok évek óta, nagyon jól működnek. Gyorsak vele a motorok, és halkak.
Cím: Re:Léptetőmotor
Írta: morfeus Dátum 2017 október 02, 13:55
Írta: morfeus Dátum 2017 október 02, 13:55
Ha netán ezek nem válnak be ,vagy elhaláloznak akkor mindenképpen rendelek az említett típus-ból 3db!
De remélem elketyeg ezekkel is,jelenleg erre van lehetőségem,anyagi okok miatt sajnos!
De remélem elketyeg ezekkel is,jelenleg erre van lehetőségem,anyagi okok miatt sajnos!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 október 02, 15:08
Írta: 000000000 Dátum 2017 október 02, 15:08
A fórum "nagy mesemondója" megint jól becsapott téged.:)
1. Ez biztos nem TB6600 az nem tud 6400 microstep-et.
2. Ebbe valószínűleg egy TB67S109-es IC van.
3. Nyugodtan használjad (hiába szidja ezt is, mint a pillanatpákát, stb...), az a lényeg 30-32 V-nál ne adjál neki nagyobb tápfeszt, és akkor nincs ezekkel semmi baj.
4. Nyilván van jobb vezérlő is, de azok akár 10-szer annyiba is kerülhetnek, mint ez. A méréseim alapján pedig azt is elmondhatom, hogy sokszor a digitális csicsa, szemfényvesztés bajt is okozhat a sok pénzért. Pl. egységugrásra rosszabbul is teljesíthetnek a modernebb vezérlők, és bizony vannak olyan alkalmazások, ahol ez gond lehet.
1. Ez biztos nem TB6600 az nem tud 6400 microstep-et.
2. Ebbe valószínűleg egy TB67S109-es IC van.
3. Nyugodtan használjad (hiába szidja ezt is, mint a pillanatpákát, stb...), az a lényeg 30-32 V-nál ne adjál neki nagyobb tápfeszt, és akkor nincs ezekkel semmi baj.
4. Nyilván van jobb vezérlő is, de azok akár 10-szer annyiba is kerülhetnek, mint ez. A méréseim alapján pedig azt is elmondhatom, hogy sokszor a digitális csicsa, szemfényvesztés bajt is okozhat a sok pénzért. Pl. egységugrásra rosszabbul is teljesíthetnek a modernebb vezérlők, és bizony vannak olyan alkalmazások, ahol ez gond lehet.
Cím: Re:Léptetőmotor
Írta: 8nyxwdmzs Dátum 2017 október 02, 15:12
Írta: 8nyxwdmzs Dátum 2017 október 02, 15:12
Sziasztok!
Nekem egy TB6560 v4 red vezérlőm van, a gondok a következők:
-A motorok hangosak alapból súgnak
-léptetésük nem sima nem könnyű
-egész lépésben darabosan fut
Mach3 vezérlés, LPT porton.
Motorok 4Nm
60HS100-4008B08-D2413
PC:
Core 2 duo processzor
2 Gb Ram
Windows XP
Félek ,hogy a vezérlővel van a probléma.
Minden segítséget szívesen veszek!
Köszönöm!
Nekem egy TB6560 v4 red vezérlőm van, a gondok a következők:
-A motorok hangosak alapból súgnak
-léptetésük nem sima nem könnyű
-egész lépésben darabosan fut
Mach3 vezérlés, LPT porton.
Motorok 4Nm
60HS100-4008B08-D2413
PC:
Core 2 duo processzor
2 Gb Ram
Windows XP
Félek ,hogy a vezérlővel van a probléma.
Minden segítséget szívesen veszek!
Köszönöm!
Cím: Re:Léptetőmotor
Írta: morfeus Dátum 2017 október 02, 15:15
Írta: morfeus Dátum 2017 október 02, 15:15
Köszönöm szépen kimerítő és hasznos válaszodat!
He elakadok és nem gond privát keresnélek?!
He elakadok és nem gond privát keresnélek?!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 október 02, 15:20
Írta: 000000000 Dátum 2017 október 02, 15:20
Olvass vissza, láthatod majd a Robsy motordinamikai mérési digaramok kapcsán, hogy az egész de még a féllépés is felejtős a motor saját rezonanciája miatt. Használj pl. 1600-os microsteppet, és zajszegényebb lesz a hajtásod.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 október 02, 15:22
Írta: 000000000 Dátum 2017 október 02, 15:22
Persze, keress nyugodtan.
Cím: Re:Léptetőmotor
Írta: vadember Dátum 2017 október 02, 17:54
Írta: vadember Dátum 2017 október 02, 17:54
Régebben láttam diagrammot a mikrolépés-nyomaték összefüggésről. Arra emlékszem, hogy drasztikusan csökkent a nyomaték a mikrolépések számának a növekedésével. Van esetleg mérésed vagy tapasztalatod ezzel kapcsolatban?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 október 02, 19:07
Írta: 000000000 Dátum 2017 október 02, 19:07
Összetett a kérdés.
Elvileg valóban csökken a nyomaték mikrolépéses üzemmódban, erre még kézi méréssel táblázatos formában végeztem méréseket vagy 20 évvel ezelőtt.
Egy teljes periódus alatt egész lépésnél az áram állandóan 2*X értékű, mikrolépénél pedig (1 és gyök2)*X közötti értékeket vesz fel 7.2 fok alatt egy 1.8 fokos alaplépésű bipoláris motornál, így a nyomaték is ilyen arányban kevesebb egy periódusra vonatkoztatva.
Viszont a pályakövetés tragikusan rossz egész lépésnél, és így a léptetőmotor rezonancia frekvenciánál akár le is állhat a motor (kiüti magát), vagy erősen lépésvesztések közepette rángatva forog nagy zaj közepette (lásd 5456, 5509 mérési eredmény görbék).
Elvileg valóban csökken a nyomaték mikrolépéses üzemmódban, erre még kézi méréssel táblázatos formában végeztem méréseket vagy 20 évvel ezelőtt.
Egy teljes periódus alatt egész lépésnél az áram állandóan 2*X értékű, mikrolépénél pedig (1 és gyök2)*X közötti értékeket vesz fel 7.2 fok alatt egy 1.8 fokos alaplépésű bipoláris motornál, így a nyomaték is ilyen arányban kevesebb egy periódusra vonatkoztatva.
Viszont a pályakövetés tragikusan rossz egész lépésnél, és így a léptetőmotor rezonancia frekvenciánál akár le is állhat a motor (kiüti magát), vagy erősen lépésvesztések közepette rángatva forog nagy zaj közepette (lásd 5456, 5509 mérési eredmény görbék).
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 október 02, 20:02
Írta: 000000000 Dátum 2017 október 02, 20:02
A fehérvári CNC találkozón mint már jeleztem sikerült a kedves Érdeklődők (Svager, Variometrum) jóvoltából pár mérést ott helyben is készíteni.
Ezek közül íme egy meglepő mérési eredmény, amikor egy digtiális komolyabb meghajtó "összeakasztotta a bajszát" a jó öreg Toshiba "agyon ócsárolt" vezérlővel. No nézzük csak mi is történt egy stepjeles mérés esetén:
(http://www.robsy.hu/te2/robsy-motor-measure-s1.gif)
Hoppá, de izgalmas és érdekes!!![#conf] Mit is látunk itt?
Akiket érdekelnek ezek a kis finom nyalánkságok, elemezzétek Ti is egy kicsit ezt a műszaki egységugrás eseményt, történést [#fejvakaras] ( ne csak én dolgozzak :) ). [#fejvakaras]
Ezek közül íme egy meglepő mérési eredmény, amikor egy digtiális komolyabb meghajtó "összeakasztotta a bajszát" a jó öreg Toshiba "agyon ócsárolt" vezérlővel. No nézzük csak mi is történt egy stepjeles mérés esetén:
(http://www.robsy.hu/te2/robsy-motor-measure-s1.gif)
Hoppá, de izgalmas és érdekes!!![#conf] Mit is látunk itt?
Akiket érdekelnek ezek a kis finom nyalánkságok, elemezzétek Ti is egy kicsit ezt a műszaki egységugrás eseményt, történést [#fejvakaras] ( ne csak én dolgozzak :) ). [#fejvakaras]
Cím: Re:Léptetőmotor
Írta: Dakota25 Dátum 2017 október 02, 20:04
Írta: Dakota25 Dátum 2017 október 02, 20:04
Ettől valamivel érthetőbb...
(https://hobbicncforum.hu/uploaded_images/2017/10/tn_026jw8s25vgqtvdhetyik_1973.jpg) (https://hobbicncforum.hu/uploaded_images/2017/10/026jw8s25vgqtvdhetyik_1973.jpg)
(https://hobbicncforum.hu/uploaded_images/2017/10/tn_026jw8s25vgqtvdhetyik_1973.jpg) (https://hobbicncforum.hu/uploaded_images/2017/10/026jw8s25vgqtvdhetyik_1973.jpg)
Cím: Re:Léptetőmotor
Írta: svager Dátum 2017 október 02, 20:17
Írta: svager Dátum 2017 október 02, 20:17
Érdekes,hogy az én vezérlőmön (http://www.t2cnc.hu/downloads/Leadshine/ES-Dhm_V1.1.pdf) alapból 800 a felbontás amit be lehet állítani.
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2017 október 02, 20:19
Írta: zozo Dátum 2017 október 02, 20:19
Egy lépés, csúnyán induló, majd csillapodó lengésekkel...
-De legalább lelépte :)
-De legalább lelépte :)
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2017 október 02, 20:22
Írta: zozo Dátum 2017 október 02, 20:22
Default-ban (on-on-on-on) 400.Írja a doksi.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 október 02, 20:23
Írta: 000000000 Dátum 2017 október 02, 20:23
Így van Sándor, a Te "nehézbombázó" 8 Nm-es hajtástechnikád is sorra kerül majd.
Cím: Re:Léptetőmotor
Írta: svager Dátum 2017 október 02, 20:58
Írta: svager Dátum 2017 október 02, 20:58
Valóban,de ez már a vezérlőről lemaradt..[#sniffles]
(https://hobbicncforum.hu/uploaded_images/2017/10/tn_83ptjpc2qe33836a2du_2939.jpg) (https://hobbicncforum.hu/uploaded_images/2017/10/83ptjpc2qe33836a2du_2939.jpg)
(https://hobbicncforum.hu/uploaded_images/2017/10/tn_83ptjpc2qe33836a2du_2939.jpg) (https://hobbicncforum.hu/uploaded_images/2017/10/83ptjpc2qe33836a2du_2939.jpg)
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2017 október 02, 21:06
Írta: zozo Dátum 2017 október 02, 21:06
De hát rajta van itt is a default és mindegyik ON.
Úgy sem fogod használni, de tutira felet lép defaultban.
Általában más leadshine vezérlőkön is így van.
Úgy sem fogod használni, de tutira felet lép defaultban.
Általában más leadshine vezérlőkön is így van.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 október 03, 07:47
Írta: 000000000 Dátum 2017 október 03, 07:47
"De legalább lelépte."
Valóban, na de mennyivel gyorsabban reagál az olcsó Toshiba, az itt a meglepő. Jól látható, hogy 2.5 ms-nál a TB6560 már teljesítette a fél lépést, a másik még ekkor álló helyzetben van. Aztán telik az idő, és 5 ms-nál már a túllendülésből kezd visszajönni a TB, a DM556 pedig ekkor kezd el picit megmozdulni. Érthetetlen, mire várt eddig ennyit, majd még a továbbiakban mindig nagyon kényelmesen reagál, és szépen, komótosan lineárisan növekedve valahol 50 ms után beéri a fürgébb versenyzőt, amelyik állva hagyta, és már rég túl van az egészen egy klasszikus csillapodó lecsengést követően.
Ez szerintem hibás megoldás pl. ennél a vezérlőnél is, ilyen nagy fix időállandó (~20-szorosa a másiknak) bizonyosan túlzás annak érdekében, hogy ne lendüljön túl. Ez a lomhaság ugyanis bizonyos szinkron és kisebb léptetési frekvenciás esetekben igen nagy pozícióhibát fog okozni, esetleg ki is zárja az ilyen alkalmazásokat.
Valóban, na de mennyivel gyorsabban reagál az olcsó Toshiba, az itt a meglepő. Jól látható, hogy 2.5 ms-nál a TB6560 már teljesítette a fél lépést, a másik még ekkor álló helyzetben van. Aztán telik az idő, és 5 ms-nál már a túllendülésből kezd visszajönni a TB, a DM556 pedig ekkor kezd el picit megmozdulni. Érthetetlen, mire várt eddig ennyit, majd még a továbbiakban mindig nagyon kényelmesen reagál, és szépen, komótosan lineárisan növekedve valahol 50 ms után beéri a fürgébb versenyzőt, amelyik állva hagyta, és már rég túl van az egészen egy klasszikus csillapodó lecsengést követően.
Ez szerintem hibás megoldás pl. ennél a vezérlőnél is, ilyen nagy fix időállandó (~20-szorosa a másiknak) bizonyosan túlzás annak érdekében, hogy ne lendüljön túl. Ez a lomhaság ugyanis bizonyos szinkron és kisebb léptetési frekvenciás esetekben igen nagy pozícióhibát fog okozni, esetleg ki is zárja az ilyen alkalmazásokat.
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 október 03, 08:50
Írta: 4ybj8h3c8 Dátum 2017 október 03, 08:50
Jók ezek az összehasonlítások. Lefordítva mondjuk szakácsnyelvre kb. arról szól, hogy paradicsom, vagy savanyú káposzta jobb a madártejbe.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 október 03, 09:00
Írta: 000000000 Dátum 2017 október 03, 09:00
Sajnálom, hogy ennyit értettél belőle.
Szívesen elmagyaráztam volna egy személyes találkozás keretében a fehérvári találkozó alkalmából, csak ugye nem volt bátorságod odajönni, ilyeneket sokkal könnyebb a virtuális térből továbbra is fröcsögnöd.
Szívesen elmagyaráztam volna egy személyes találkozás keretében a fehérvári találkozó alkalmából, csak ugye nem volt bátorságod odajönni, ilyeneket sokkal könnyebb a virtuális térből továbbra is fröcsögnöd.
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 október 03, 09:27
Írta: 4ybj8h3c8 Dátum 2017 október 03, 09:27
Egy tesztkörnyezet kialakításának mi köze van Fehérvárhoz? Máshol nem működik?
Mindegy.
Egy adott motort a gyári határértékig kell tesztelni, a gyár által megadott paraméterekkel. Ha fölötte hajtod és nem működik, a gyár széttárja a karját, és kiröhög. Ha nem a megadott értékekkel hajtod és nem működik, a gyár széttárja a karját és kiröhög, így jártál.
Azt halljuk tőled tíz éve, hogy a hajtásrendszereket méretezni kell. Mit látunk most? Adhoc motor adhoc vezérlőkre ráakasztva, gyári adatokat letojva meghajtva, és óbégatás, hogy nem működik.
Nema-23 4 amperes motor. TB tud 3 ampert. Már hibádzik az elképzelés, nem tudja kihajtani.
Segítek a tesztkörnyezet kialakításában: Nema-23 200 lépés (1,8 fok), 4A - nem nézem meg, talán 50 V, és 100-300 lépés per másodperc. Ezen belül teszteld, ne hasraütéses alapon ami neked tetszik és utána csodálkozol ha nem működik.
Mindegy.
Egy adott motort a gyári határértékig kell tesztelni, a gyár által megadott paraméterekkel. Ha fölötte hajtod és nem működik, a gyár széttárja a karját, és kiröhög. Ha nem a megadott értékekkel hajtod és nem működik, a gyár széttárja a karját és kiröhög, így jártál.
Azt halljuk tőled tíz éve, hogy a hajtásrendszereket méretezni kell. Mit látunk most? Adhoc motor adhoc vezérlőkre ráakasztva, gyári adatokat letojva meghajtva, és óbégatás, hogy nem működik.
Nema-23 4 amperes motor. TB tud 3 ampert. Már hibádzik az elképzelés, nem tudja kihajtani.
Segítek a tesztkörnyezet kialakításában: Nema-23 200 lépés (1,8 fok), 4A - nem nézem meg, talán 50 V, és 100-300 lépés per másodperc. Ezen belül teszteld, ne hasraütéses alapon ami neked tetszik és utána csodálkozol ha nem működik.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 október 03, 09:40
Írta: 000000000 Dátum 2017 október 03, 09:40
Miről beszélsz?
Fussál már neki megint az 5594 bejegyzésnek, és kb. 1 hét múlva, amikor valamit végre megértettél belőle, legközelebb akkor gyere ide topikot rombolni. [#circling]
Fussál már neki megint az 5594 bejegyzésnek, és kb. 1 hét múlva, amikor valamit végre megértettél belőle, legközelebb akkor gyere ide topikot rombolni. [#circling]
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 október 03, 09:52
Írta: 4ybj8h3c8 Dátum 2017 október 03, 09:52
Nem robinak, őt a valóság nem szokta érdekelni, hanem a "kőfaragóknak és balettáncosoknak", hogy értsék, miről van szó:
Ha veszek egy Chevi Camarot, és telenyomom 72-es oktánszámú mosóbenzinnel, akkor én nem csodálkozok, ha kimegyek vele a versenypályára és egy kispolszki röhögve lealáz. Robsy kiakadna, hogy a kispolák otthagyja, és csodálkozik ha a versenymotor nem az adott paraméterek szerint üzemel.
Magyarra fordítva, ha egy motort nem a gyári adatokkal hajtok, akkor az nem úgy működik ahogy a gyár megtervezte. Ez tény (egyesek szemében szakmaiatlanság) és kőkeményen a valóság.
(Délután leszek, addig agyalhatsz a valóságon és keresheted a magyarázatokat a mellébeszélésedre)
Ha veszek egy Chevi Camarot, és telenyomom 72-es oktánszámú mosóbenzinnel, akkor én nem csodálkozok, ha kimegyek vele a versenypályára és egy kispolszki röhögve lealáz. Robsy kiakadna, hogy a kispolák otthagyja, és csodálkozik ha a versenymotor nem az adott paraméterek szerint üzemel.
Magyarra fordítva, ha egy motort nem a gyári adatokkal hajtok, akkor az nem úgy működik ahogy a gyár megtervezte. Ez tény (egyesek szemében szakmaiatlanság) és kőkeményen a valóság.
(Délután leszek, addig agyalhatsz a valóságon és keresheted a magyarázatokat a mellébeszélésedre)
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 október 03, 09:54
Írta: 4ybj8h3c8 Dátum 2017 október 03, 09:54
Ja, valószínű, hogy mire hazaérek ki leszek vágva, de ettől az igazság még igazság marad bármennyire is kellemetlen ez pár embernek.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 október 03, 11:54
Írta: 000000000 Dátum 2017 október 03, 11:54
Ezeken a tanulságos eredményeken pedig az látható, hogy az első step jel lassú, késedelmes feldolgozása sajnos nagyobb kezdeti eltéréseket okoz a pozíció pályakövetési folyamat során.
(http://www.robsy.hu/te2/robsy-motor-measure-DM556-400.gif)
(http://www.robsy.hu/te2/robsy-motor-measure-DM556-400.gif)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 október 03, 12:06
Írta: 000000000 Dátum 2017 október 03, 12:06
Svager Fórum társunk hozott a találkozóra egy komolyabb (Easy servo), nagy nyomatékú léptetőmotoros hajtást, készített is egy fotót a gyorsan összeállított mérési elrendezésről:
(http://cnctar.hobbycnc.hu/Svager/Motor%20bem%C3%A9r%C3%A9s%20Feh%C3%A9rv%C3%A1r/DSC02841.JPG)
A hajtásdinamikai bemérési eredmények pedig itt láthatók erről a rendszerről:
(http://www.robsy.hu/te2/robsy-motor-measure-8Nm.gif)
Szépen teljesítő, egészen jó minőségű hajtásról tanúskodnak ezek a mérési diagramok.
(http://cnctar.hobbycnc.hu/Svager/Motor%20bem%C3%A9r%C3%A9s%20Feh%C3%A9rv%C3%A1r/DSC02841.JPG)
A hajtásdinamikai bemérési eredmények pedig itt láthatók erről a rendszerről:
(http://www.robsy.hu/te2/robsy-motor-measure-8Nm.gif)
Szépen teljesítő, egészen jó minőségű hajtásról tanúskodnak ezek a mérési diagramok.
Cím: Re:Léptetőmotor
Írta: LittleSV Dátum 2017 október 03, 14:04
Írta: LittleSV Dátum 2017 október 03, 14:04
Tibor arról van információd/mérésed hogy különböző típusú kuplungok mennyi késleltetést visznek a hajtásba (ha visznek egyáltalán)? Ha jól gondolom a gumicsöves "kuplung" vagy a betétes karmos kuplungnak is van holtjátéka (nem tudom a pontos szakmai kifejezést a jelenségre) vagy késése a forgó mozgás átvitelben (a gumi csavarodik, a karmosnál a betét nyomódhat). Ezek befolyásolják a mérési eredményt, vagy használsz kompenzációt a Robsy sw-ben?
Köszönöm!
Köszönöm!
Cím: Re:Léptetőmotor
Írta: fn47xk7ei Dátum 2017 október 03, 14:25
Írta: fn47xk7ei Dátum 2017 október 03, 14:25
Gratulálok Tibor az eredményeidhez és a kitartó munkásságod okán is .[#eljen][#integet2]..és persze ezek után leírom mi nem tetszik nekem azaz a kritikámat is : az egész mérésedet elfogadhatatlannak kell vennem !Ilyen mérési eredményt szerintem egy mérnök ember nem adhat ki a kezéből ahol nincsenek stabil pontok !(Írom én egy buta lakatos emberként .)Évek óta foglalkozol ezen témával és akkor mit látok - egy telefonkönyv van az encoder alá téve ! Szigetelő szalag a kuplung ...no ezt még elnézem valahogyan ..de , hogy a mért motor is csak úgy az asztalra lerakva figyelmen kívül hagyva a motor forgórész tömegének visszahatását az állórészre és így rezgést-lengést-rezonanciát-stb.- így mérni hiteltelen ! Évek óta foglalkozol a témával és még nem állítottál össze egy komoly univerzális mérőpadot ?[#levele]Én most egy egyszerű hegesztő asztalt készítek éppen - de már a negyedik napomat cseszem el rá és még mindig csak a lábaknál tartok mert azt akarom , hogy számomra a legjobb vagy legmegfelelőbb legyen így az időt mégsem sajnálom rá . Elvárnám , hogy mérésnél minél jobban kizárt tényezők legyenek a külső hatások ill. a mérést erősen torzító esetleges hatások - a te esetedben egy nagyobb tömegű több fajta motor felfogatására alkalmas stabilan tartó konzolt - egy egytengelyűséget állítható eszközzel stabilan felfogatott encodert - egy jó minőségű nagyobb teljesítményű tápot állítható feszültséggel és persze áram-volt kijelzőkkel , különböző furatméretű de egységesített tömegű kuplung készlettel ,és még más okosabb ember által megmondott " mivel még" .. A leírtakat ne kötekedésnek vedd mert nem áll szándékomban az - de őszinte KŐ KEMÉNY KRITIKÁNAK IGEN ![#worship]De hajrá , tessék folytatni a munkát ![#eljen]
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 október 03, 14:32
Írta: 4ybj8h3c8 Dátum 2017 október 03, 14:32
Alattam leírták a méréstechnikád alapvető hibáit, már csak azzal tudom kiegészíteni, hogy a terhelést is jó lenne belekalkulálni, a csicsa grafikonod üres motorra igaz, de marhára nem mindegy, hogy mozgat egy 20 kilós marófejet, vagy rá van akasztva egy 2 wattos lézer a maga 20 dekájával.
Jó az elgondolásod, már csak használhatóvá és hitelessé kell tenni a mérésedet, hogy a motor valódi karakterisztikáját tudd bemutatni különböző körülmények között.
Hasonló "profizmust" úgy 30 éve láttam utoljára amikor egy koma a falból kilógó drótokra szigeteletlen krokicsipesszel csatlakozott, 3 fázis 25 A fogyasztóval.
Jó az elgondolásod, már csak használhatóvá és hitelessé kell tenni a mérésedet, hogy a motor valódi karakterisztikáját tudd bemutatni különböző körülmények között.
Hasonló "profizmust" úgy 30 éve láttam utoljára amikor egy koma a falból kilógó drótokra szigeteletlen krokicsipesszel csatlakozott, 3 fázis 25 A fogyasztóval.
Cím: Re:Léptetőmotor
Írta: remrendes Dátum 2017 október 03, 15:03
Írta: remrendes Dátum 2017 október 03, 15:03
En ugy olvastam, hogy mikrolepes eseten a tartonyomatek igen, csokken, de amint a forgas indul, mar nagyobb vagy legalabb egyenlo nyomatekkal rendelkezik, mint az egesz lepeses verzio.
Cím: Re:Léptetőmotor
Írta: Csuhás Dátum 2017 október 03, 15:07
Írta: Csuhás Dátum 2017 október 03, 15:07
Remélem Tibor megmutatja a profi berendezését is néhány fotóval, és pár röpke videóval, hogy ne egy kiállításon provizórikusan összerakott mérést tekintse valaki a "mérőrendszernek"
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 október 03, 15:55
Írta: 000000000 Dátum 2017 október 03, 15:55
Hatalmas tévedésben vagy.
Szerinted mennyi a méréseknél alkalmazott encoder üresjárati nyomatéka, J-je, és a megtett mérési szögelfordulás? Ezek hogyan arányulnak a mostani 8 Nm-es motorhoz képest?
Ha majd ezeknek utána nézel, és a tény műszaki adatakat tudni és értelmezni fogod helyesen, akkor pont arra jössz rá, hogy a szigetelő szalagos primitívnek tűnő tengely összekapcsolás megoldás a lehető legjobb, és aligha van ettől egyszerűbb, ami ennyire elhanyagolható módon befolyásolja a mérést.
Azt meg kérlek nézd el nekem, hogy a világ összes motorjának a felfogatásához ott helyben a CNC találkozón nem voltam felkészülve, csak a szabványos Nema 17 és 23 motorokra. Viszont képzeld, Svágernak van két keze, és le tudta szorítani a motort a kiállítói asztalra egyedül is, amikor kellett egyáltalán. Hiszen a többször megismételt mérés során gyakorlatilag egybevágóan azonos eredmények keletkeztek. Sőt volt olyan fordulatszám tartomány, ahol tök mindegy volt, hogy lefogtuk vagy nem pont a fent említett mérési TÉNYEK miatt.
Összességében tehát kérlek gondolj át sok mindent a jövőben, és NE írjál le ilyen elhamarkodotton hazug és durva dolgokat méréseim szakmai hátterét illetően, kár az alternatív valóságaid harsogásával beállni abba a sorba, amit pl. Lazi is művel. Ugyanis tudod az életben az mindig veszélyes, ha a tudatlanság, szakmaiatlanság még kioktató magabiztossággal, rosszindulattal is párosul, ezt a együttállást nehezen szoktam viselni. De mint már írtam az új Fórumos PID hozzáállásom kapcsán az ilyen esetekre is szépen, higgadtan válaszoltam most neked.
Végül pedig szeretném megköszönni Sándornak és Variometrum-nak, hogy érdekelték az adott hajtásaik mérési eredményei, és szakmai, emberi hozzállásukkal színesítették a Fórumot, a mérési eredmények megosztása pedig remélhetőleg a többségnek hasznos és tanulságos volt.
Szerinted mennyi a méréseknél alkalmazott encoder üresjárati nyomatéka, J-je, és a megtett mérési szögelfordulás? Ezek hogyan arányulnak a mostani 8 Nm-es motorhoz képest?
Ha majd ezeknek utána nézel, és a tény műszaki adatakat tudni és értelmezni fogod helyesen, akkor pont arra jössz rá, hogy a szigetelő szalagos primitívnek tűnő tengely összekapcsolás megoldás a lehető legjobb, és aligha van ettől egyszerűbb, ami ennyire elhanyagolható módon befolyásolja a mérést.
Azt meg kérlek nézd el nekem, hogy a világ összes motorjának a felfogatásához ott helyben a CNC találkozón nem voltam felkészülve, csak a szabványos Nema 17 és 23 motorokra. Viszont képzeld, Svágernak van két keze, és le tudta szorítani a motort a kiállítói asztalra egyedül is, amikor kellett egyáltalán. Hiszen a többször megismételt mérés során gyakorlatilag egybevágóan azonos eredmények keletkeztek. Sőt volt olyan fordulatszám tartomány, ahol tök mindegy volt, hogy lefogtuk vagy nem pont a fent említett mérési TÉNYEK miatt.
Összességében tehát kérlek gondolj át sok mindent a jövőben, és NE írjál le ilyen elhamarkodotton hazug és durva dolgokat méréseim szakmai hátterét illetően, kár az alternatív valóságaid harsogásával beállni abba a sorba, amit pl. Lazi is művel. Ugyanis tudod az életben az mindig veszélyes, ha a tudatlanság, szakmaiatlanság még kioktató magabiztossággal, rosszindulattal is párosul, ezt a együttállást nehezen szoktam viselni. De mint már írtam az új Fórumos PID hozzáállásom kapcsán az ilyen esetekre is szépen, higgadtan válaszoltam most neked.
Végül pedig szeretném megköszönni Sándornak és Variometrum-nak, hogy érdekelték az adott hajtásaik mérési eredményei, és szakmai, emberi hozzállásukkal színesítették a Fórumot, a mérési eredmények megosztása pedig remélhetőleg a többségnek hasznos és tanulságos volt.
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 október 03, 16:13
Írta: 4ybj8h3c8 Dátum 2017 október 03, 16:13
Hogy lássuk a valóságot is, hogy milyen az amikor profik veszik fel egy léptetőmotor jelleggörbéit, egy általános léptetőmotor nyomaték - lépésfrekvencia görbéje.
(https://hobbicncforum.hu/uploaded_images/2017/10/tn_499h7kcaw5dk23ahs9a_710.jpg) (https://hobbicncforum.hu/uploaded_images/2017/10/499h7kcaw5dk23ahs9a_710.jpg)
(https://hobbicncforum.hu/uploaded_images/2017/10/tn_499h7kcaw5dk23ahs9a_710.jpg) (https://hobbicncforum.hu/uploaded_images/2017/10/499h7kcaw5dk23ahs9a_710.jpg)
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 október 03, 16:17
Írta: 4ybj8h3c8 Dátum 2017 október 03, 16:17
Egy olyan verzió, amin látszik az, amikor "szakmaiatlanul" meg mertem kérdőjelezni a motor áramát, feszültségét és annak hatásait:
(https://hobbicncforum.hu/uploaded_images/2017/10/tn_ig0uh3h0a3hzuvq6ie0ey_710.gif) (https://hobbicncforum.hu/uploaded_images/2017/10/ig0uh3h0a3hzuvq6ie0ey_710.gif)
(https://hobbicncforum.hu/uploaded_images/2017/10/tn_ig0uh3h0a3hzuvq6ie0ey_710.gif) (https://hobbicncforum.hu/uploaded_images/2017/10/ig0uh3h0a3hzuvq6ie0ey_710.gif)
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 október 03, 16:17
Írta: 4ybj8h3c8 Dátum 2017 október 03, 16:17
Info lemaradt, szaggatott 24V, a másik 48V.
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2017 október 03, 17:01
Írta: Rabb Ferenc Dátum 2017 október 03, 17:01
Valóban ilyen az amikor profik veszik fel egy léptetőmotor jelleggörbéit, egy általános léptetőmotor nyomaték - lépésfrekvencia görbéjét.
De Tibor mintha egy egészen más tulajdonságát vizsgálta volna a motornak... Vagy tévedek, mint mindenki más? [#nemtudom]
De Tibor mintha egy egészen más tulajdonságát vizsgálta volna a motornak... Vagy tévedek, mint mindenki más? [#nemtudom]
Cím: Re:Léptetőmotor
Írta: fn47xk7ei Dátum 2017 október 03, 17:03
Írta: fn47xk7ei Dátum 2017 október 03, 17:03
Má ne haragudj de azért az durva , hogy "hazug" és kioktatni sem akartalak ! Innentől kezdve lenézlek !
Cím: Re:Léptetőmotor
Írta: fn47xk7ei Dátum 2017 október 03, 17:07
Írta: fn47xk7ei Dátum 2017 október 03, 17:07
A "rosszindulatot" meg főleg visszautasítom !!
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 október 03, 17:52
Írta: 4ybj8h3c8 Dátum 2017 október 03, 17:52
Nem tévedsz. Mert ha jól megnézzük, Tibor görbéje is rajta van. Fogsz egy ceruzát, és találomra beleböksz a "C" tartományba, ahol a pontot látod, ott van a görbéje.
Melyik a használható? Ismerni egy motor adatait és annak alapján használni, tudni, hogy mi az a lépésfrekvencia ami alatt, felett nem működik normálisan, vagy tudni egy lépésfrekvenciát ahol nem jó, és semmi más infó nincs a motorról.
De mehetünk tovább, ha egy motort gyári adatokkal meghajtok, és működik, akkor mi a helyzet ha önkényesen visszaveszem a teljesítményét, és nagy szemekkel nézve csodálkozom és hirdetem, hogy nédmá de gagyi csicsavilág, ezen nem tudja a specifikációját.
Melyik a használható? Ismerni egy motor adatait és annak alapján használni, tudni, hogy mi az a lépésfrekvencia ami alatt, felett nem működik normálisan, vagy tudni egy lépésfrekvenciát ahol nem jó, és semmi más infó nincs a motorról.
De mehetünk tovább, ha egy motort gyári adatokkal meghajtok, és működik, akkor mi a helyzet ha önkényesen visszaveszem a teljesítményét, és nagy szemekkel nézve csodálkozom és hirdetem, hogy nédmá de gagyi csicsavilág, ezen nem tudja a specifikációját.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 október 03, 18:21
Írta: 000000000 Dátum 2017 október 03, 18:21
"De Tibor mintha egy egészen más tulajdonságát vizsgálta volna a motornak..."
Én is ezt gondolom.[#eljen]
De tudod, új világ van a Hobby Fórumon, az alternatív valóság világa Lazi módon, ahol egy motor nyomaték-fordulatszám diagramja szerinte dettó ugyanaz, mint egy motor szögelfordulás-idő ábra. Jajj Istenem!!![#csodalk]
Ez az ember szánalmas dolgokat művel itt, rá kell hagyni, ugyanúgy, mint a "lenézős" emberkére.
Én is ezt gondolom.[#eljen]
De tudod, új világ van a Hobby Fórumon, az alternatív valóság világa Lazi módon, ahol egy motor nyomaték-fordulatszám diagramja szerinte dettó ugyanaz, mint egy motor szögelfordulás-idő ábra. Jajj Istenem!!![#csodalk]
Ez az ember szánalmas dolgokat művel itt, rá kell hagyni, ugyanúgy, mint a "lenézős" emberkére.
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2017 október 03, 18:25
Írta: Rabb Ferenc Dátum 2017 október 03, 18:25
A körtét hasonlítod össze az almával. Gyümi mind a kettő - de egészen más
Az általad bemutatott diagramok a motor - talán mondhatom így - egy állandósult állapotához tartozó adatait mutatják a teljes üzemi tartományban. Tibor viszont a lépések közötti tranziens jelenségeket vizsgálja nagy felbontásban.
Való igaz amit mondasz - a "C" tartomány egy pontja Tibor egész diagramja. Ezért nem lehet egy kalap alá venni őket még akkor sem, ha most Tiboron megint nincs sapka.
Az általad bemutatott diagramok a motor - talán mondhatom így - egy állandósult állapotához tartozó adatait mutatják a teljes üzemi tartományban. Tibor viszont a lépések közötti tranziens jelenségeket vizsgálja nagy felbontásban.
Való igaz amit mondasz - a "C" tartomány egy pontja Tibor egész diagramja. Ezért nem lehet egy kalap alá venni őket még akkor sem, ha most Tiboron megint nincs sapka.
Cím: Re:Léptetőmotor
Írta: ecp4rs0md Dátum 2017 október 03, 18:26
Írta: ecp4rs0md Dátum 2017 október 03, 18:26
Sziasztok! Érdekelnek a léptetőmotorok de sajnos akárhányszor ide látogatok mindig ezt a civódást látom. Kezd unalmas lenni,kérném,hogy aki nem tartja hitelesnek,szakmainak a másik hozzászólását az hagyja figyelmen kívül és ne terheljük a fórumot felesleges szócsatákkal. Nem vagyunk egyformák ezt kell elsősorban megérteni.Köszönöm.
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2017 október 03, 18:42
Írta: Rabb Ferenc Dátum 2017 október 03, 18:42
Ha a szakmaiatlan hozzászólásokat mindenki - aki esetleg még ért is hozzá - figyelmen kívül hagyja akkor végül csak a hülyeség és a téveszme marad. Nagy hiba lenne!
De a társalgási stíluson, az érvek és ellenérvek ütköztetésén és a viták színvonalán mindenképpen változtatni kellene.
Bár nincsenek illúzióim ezzel kapcsolatban, mert több mint tíz éve fórumozok itt (ne tévesszen meg az, hogy a valódi nevemen csak 2009 óta)
De a társalgási stíluson, az érvek és ellenérvek ütköztetésén és a viták színvonalán mindenképpen változtatni kellene.
Bár nincsenek illúzióim ezzel kapcsolatban, mert több mint tíz éve fórumozok itt (ne tévesszen meg az, hogy a valódi nevemen csak 2009 óta)
Cím: Re:Léptetőmotor
Írta: 4ybj8h3c8 Dátum 2017 október 03, 18:53
Írta: 4ybj8h3c8 Dátum 2017 október 03, 18:53
Igaz, de én is ezt írtam:
"Jók ezek az összehasonlítások. Lefordítva mondjuk szakácsnyelvre kb. arról szól, hogy paradicsom, vagy savanyú káposzta jobb a madártejbe."
Nekem igazából az tetszik, hogy mint mindig, a képletből azt emelitek ki ami titeket (is) igazol, amit meg ezen felül írtam, az valahogy lemarad mert az a kellemetlenebb része a bulinak.
Akkor újra. Az összehasonlítást arra használtam, hogy jelezzem, különböző teljesítményű motormeghajtókkal van meghajtva a motor és a végeredmény nem a valós állapotokat tükrözi. És bármennyire is nem tetszik nektek a valóság, sajnos ha egy motort nem hajtok a valós gyári adataival, akkor soha nem fogja hozni a specifikációját. Az elektronika és a fizika sajna így működik, ha egy tömeg megmozdításához x energiára van szükség, akkor a 0.5 - 0.6 x kevés hozzá, hamis eredményeket fog szolgáltatni egy ilyen mérés. Arról már végkép nem beszélve, hogy a léptetőmotor adott fizikailag meghatározott lépésszámra van konstruálva, a meghajtók lépésosztása csak egy elektronika erőltetés, soha nem fog tökéletes eredményt adni.
Még tovább lépve, én szeretem a miérteket is megismerni, és főleg azt is megtudni, hogy mivel lehet elkerülni az adott hibát, azaz a lépésvesztést. Nem véletlenül tettem be ezt a grafikont, mert a Tibor féle kiragadott pillanat ábrázolja a jelenséget, de Tiborunk mint máskor is, a megoldást nem akarja elmondani, a táblázatai csak az eddigi, az utóbbi időkben leszerepelt "egységugrás" mantráját váltják le egy újabbra ami pontosan ugyanazt a "nesze semmi fogd meg jól" mentalitást hirdetik a szokásos reklámmantrájával együtt.
"Jók ezek az összehasonlítások. Lefordítva mondjuk szakácsnyelvre kb. arról szól, hogy paradicsom, vagy savanyú káposzta jobb a madártejbe."
Nekem igazából az tetszik, hogy mint mindig, a képletből azt emelitek ki ami titeket (is) igazol, amit meg ezen felül írtam, az valahogy lemarad mert az a kellemetlenebb része a bulinak.
Akkor újra. Az összehasonlítást arra használtam, hogy jelezzem, különböző teljesítményű motormeghajtókkal van meghajtva a motor és a végeredmény nem a valós állapotokat tükrözi. És bármennyire is nem tetszik nektek a valóság, sajnos ha egy motort nem hajtok a valós gyári adataival, akkor soha nem fogja hozni a specifikációját. Az elektronika és a fizika sajna így működik, ha egy tömeg megmozdításához x energiára van szükség, akkor a 0.5 - 0.6 x kevés hozzá, hamis eredményeket fog szolgáltatni egy ilyen mérés. Arról már végkép nem beszélve, hogy a léptetőmotor adott fizikailag meghatározott lépésszámra van konstruálva, a meghajtók lépésosztása csak egy elektronika erőltetés, soha nem fog tökéletes eredményt adni.
Még tovább lépve, én szeretem a miérteket is megismerni, és főleg azt is megtudni, hogy mivel lehet elkerülni az adott hibát, azaz a lépésvesztést. Nem véletlenül tettem be ezt a grafikont, mert a Tibor féle kiragadott pillanat ábrázolja a jelenséget, de Tiborunk mint máskor is, a megoldást nem akarja elmondani, a táblázatai csak az eddigi, az utóbbi időkben leszerepelt "egységugrás" mantráját váltják le egy újabbra ami pontosan ugyanazt a "nesze semmi fogd meg jól" mentalitást hirdetik a szokásos reklámmantrájával együtt.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2017 október 03, 19:43
Írta: 000000000 Dátum 2017 október 03, 19:43
Szinte minden mondatod egy hatalmas szakmai sületlenség.:)
Pl. aszondja:
"utóbbi időkben leszerepelt "egységugrás" mantráját váltják le egy újabbra"
1. Csak nálad meg még pár kötekedő, topikromboló haverodnál "szerepelt le", mert a fogalmat se ismered, és a jelentőségét se a méréstechnikában.
2. Ezek a mérések természetesen továbbra is a sebesség egységugrás vizsgáló jelre adott válaszdiagramok. Annyira szánalmas, hogy még ezt se értetted meg belőlük.
A nap logikai találós kérdése pedig a következő:
Egy üresjárati Robsy motor dinamikai mérés során pl. kiderül, hogy az adott motor/meghajtó annyira hitvány, hogy lépést téveszt nulla hasznos nyomaték mellett is (lásd #5456 diagram). Leterhelem még adott nyomatékkal is, ettől jobb lesz, és megszűnik a lépésvesztése?[#fejvakaras][#nevetes1][#vigyor2]
Pl. aszondja:
"utóbbi időkben leszerepelt "egységugrás" mantráját váltják le egy újabbra"
1. Csak nálad meg még pár kötekedő, topikromboló haverodnál "szerepelt le", mert a fogalmat se ismered, és a jelentőségét se a méréstechnikában.
2. Ezek a mérések természetesen továbbra is a sebesség egységugrás vizsgáló jelre adott válaszdiagramok. Annyira szánalmas, hogy még ezt se értetted meg belőlük.
A nap logikai találós kérdése pedig a következő:
Egy üresjárati Robsy motor dinamikai mérés során pl. kiderül, hogy az adott motor/meghajtó annyira hitvány, hogy lépést téveszt nulla hasznos nyomaték mellett is (lásd #5456 diagram). Leterhelem még adott nyomatékkal is, ettől jobb lesz, és megszűnik a lépésvesztése?[#fejvakaras][#nevetes1][#vigyor2]
Cím: Re:Léptetőmotor
Írta: fn47xk7ei Dátum 2017 október 03, 20:03
Írta: fn47xk7ei Dátum 2017 október 03, 20:03
Nyugi , én biztosan nem fogok napokig vitatkozni . Én eddig elismertem az illető munkásságát és jeleztem is itt a fórumon is és + persze biztosan szakmaiatlan is vagyok mert miért is lennék az - nem a szakmám e téma . De viszont az nem tűrhetem el , hogy így válaszoljon valaki ezért már küldtem is az illetőt a letiltott felhasználók közzé .Általánosítani meg nem szeretnék mert biztos vagyok benne , hogy az értelmiségünk java része nem ilyen stílusban szokott válaszolni egy általa nem tetsző kritikára vagy véleményre .Elnézést ha hosszú voltam ![#worship]
Cím: Re:Léptetőmotor
Írta: b7gwr90m6 Dátum 2018 január 25, 21:34
Írta: b7gwr90m6 Dátum 2018 január 25, 21:34
Sziasztok
Érdeklődni szeretnék, mivel sajnos nem értek hozzá:/
Ha van egy ilyen léptetőmotor ( step syn 103h7126-5740 )akkor azt csak a gyári hozzávaló vezérlővel lehet működtetni?
Vagy ha nem akkor mitől fűgg?
Köszi
Érdeklődni szeretnék, mivel sajnos nem értek hozzá:/
Ha van egy ilyen léptetőmotor ( step syn 103h7126-5740 )akkor azt csak a gyári hozzávaló vezérlővel lehet működtetni?
Vagy ha nem akkor mitől fűgg?
Köszi
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2018 január 25, 21:44
Írta: svejk Dátum 2018 január 25, 21:44
Nem, ez egy kommersz kialakítású de márkás léptetőmotor, bipoláris (ma már szinte mind ilyen) meghajtókkal működik.
Cím: Re:Léptetőmotor
Írta: b7gwr90m6 Dátum 2018 január 25, 21:46
Írta: b7gwr90m6 Dátum 2018 január 25, 21:46
Ouhhh értem, akkor igazából csak azt kell néznem hogy a vezérlő az bipoláris motorhoz való legyen?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2018 január 25, 21:51
Írta: svejk Dátum 2018 január 25, 21:51
Így van, meg hogy tudjon a vezérlő legalább 2 A-t.
Cím: Re:Léptetőmotor
Írta: b7gwr90m6 Dátum 2018 január 25, 21:54
Írta: b7gwr90m6 Dátum 2018 január 25, 21:54
Köszönöm a segítséget!
Cím: Re:Léptetőmotor
Írta: b7gwr90m6 Dátum 2018 január 25, 21:59
Írta: b7gwr90m6 Dátum 2018 január 25, 21:59
Esetleg még egy gyors kérdés ezekhez milyen vezérlőt ajànlanál amit ebay-en belehet szerezni?! Vagy esetleg amit érdemes elkerülni ebay-en!?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2018 január 25, 23:05
Írta: svejk Dátum 2018 január 25, 23:05
Valamilyen digitálisnak tituláltad vegyél, pl. MSDD vagy ilyesmi.
Cím: Re:Léptetőmotor
Írta: Peppe51 Dátum 2018 január 30, 14:17
Írta: Peppe51 Dátum 2018 január 30, 14:17
Teljesítmény kérdés:
A4899 NEMA 17
TB6560 NEMA 23
TB6660 NEMA?
DM556 NEMA?
Kérdezem, hogy a vezérlőhöz max. használható motorok típusai hogyan alakulnak a fenti négy esetben?
Szomorúan láttam, hogy minden melegszik!!!
Tapasztalt kollégák!
A vezérlőcsip hány fokig melegedhet lépésvesztés nélkül?
Köszönettel P
A4899 NEMA 17
TB6560 NEMA 23
TB6660 NEMA?
DM556 NEMA?
Kérdezem, hogy a vezérlőhöz max. használható motorok típusai hogyan alakulnak a fenti négy esetben?
Szomorúan láttam, hogy minden melegszik!!!
Tapasztalt kollégák!
A vezérlőcsip hány fokig melegedhet lépésvesztés nélkül?
Köszönettel P
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2018 január 31, 09:00
Írta: 000000000 Dátum 2018 január 31, 09:00
Minden léptetőmotor vezérlő IC-nak van olyan gyári adata, ahol:
1. Megadják a chip maximum fázisonkénti motoráramát.
2. Megadják, azt az áram töréspontot (vagy kiszámíthatod egyéb gyári adatokból), amit még külön hűtés nélkül az IC tok vagy a különálló FET híd el tud disszipálni. Ezt meghaladóan pedig akkora hűtőbordát kell rátenni, ami a maximális motoráramnál se lesz a gyakorlatban 70-100 C foknál melegebb.
A komolyabb, vagy bedobozolt vezérlőket elve hűtőbordával szerelik, és az jó esetben akkora, hogy nincs külön dolgod a hűtéssel.
Az olcsó stick vezérlőket (DRV8825, A4988, stb.) pedig általában ~1 A felett a hozzájuk adott megfelelő hűtőbordával kell ellátni, és akkor megint nincs már dolgod.
A motor mérethez (NemaX) pedig közvetenül nem érdemes kötni egy vezérlőt, hiszen nagy méretű motorban is vannak kisebb áramúak, és fordítva is igaz.
1. Megadják a chip maximum fázisonkénti motoráramát.
2. Megadják, azt az áram töréspontot (vagy kiszámíthatod egyéb gyári adatokból), amit még külön hűtés nélkül az IC tok vagy a különálló FET híd el tud disszipálni. Ezt meghaladóan pedig akkora hűtőbordát kell rátenni, ami a maximális motoráramnál se lesz a gyakorlatban 70-100 C foknál melegebb.
A komolyabb, vagy bedobozolt vezérlőket elve hűtőbordával szerelik, és az jó esetben akkora, hogy nincs külön dolgod a hűtéssel.
Az olcsó stick vezérlőket (DRV8825, A4988, stb.) pedig általában ~1 A felett a hozzájuk adott megfelelő hűtőbordával kell ellátni, és akkor megint nincs már dolgod.
A motor mérethez (NemaX) pedig közvetenül nem érdemes kötni egy vezérlőt, hiszen nagy méretű motorban is vannak kisebb áramúak, és fordítva is igaz.
Cím: Re:Léptetőmotor
Írta: Pali79 Dátum 2018 január 31, 10:00
Írta: Pali79 Dátum 2018 január 31, 10:00
Egyetértek az előttem szólóval! A motor áramához kell választani a megfelelő vezérlőt. Az A4988-cal is lehet jahtani kisebb NEMA23-as motort, mert 30 V 2A-ig lehet terhelni. A TB6560 vs TB6600 között nincs olyan nagy különbség. Összeszedve:
A4988: 32V 2A
TB6560: 32V 3A
TB6600: 45V 4,5A
DM556: 50V 5,6A
Az áram értéke általában a motorra is rá van írva. Ha nincs ráírva semmi és adatlap sincs akkor az problémás.
Egyébként az A4988 adatlapja szerint 85 fok az üzemi hőmérséklet felső határa, az abszolút max 150 fok. Tehát ha melegszik az nem feltétlen baj. Ha forró, az már gond. Ha be vannak dobozolva rendesen akkor a doboz szellőzését meg lehet támogatni egy ventilátorral vagy minden hűtőbordára is lehet külön ventit tenni, de a doboz szellőzőzése fontosabb.
A4988: 32V 2A
TB6560: 32V 3A
TB6600: 45V 4,5A
DM556: 50V 5,6A
Az áram értéke általában a motorra is rá van írva. Ha nincs ráírva semmi és adatlap sincs akkor az problémás.
Egyébként az A4988 adatlapja szerint 85 fok az üzemi hőmérséklet felső határa, az abszolút max 150 fok. Tehát ha melegszik az nem feltétlen baj. Ha forró, az már gond. Ha be vannak dobozolva rendesen akkor a doboz szellőzését meg lehet támogatni egy ventilátorral vagy minden hűtőbordára is lehet külön ventit tenni, de a doboz szellőzőzése fontosabb.
Cím: Re:Léptetőmotor
Írta: istvan3 Dátum 2018 január 31, 10:31
Írta: istvan3 Dátum 2018 január 31, 10:31
Én használtam már mindkét féle TB-s léptető vezérlőt. Megbízhatóság szempontjából rendben voltak, egy sem ment tönkre, van amelyiket 4-5 éve használom, viszont biztosan nem tudja egyik sem a megadott áramértéket. TB6600-as 5A-on meg sem melegítette a motort, míg a digitális DM542-est nem lehetett a max 4.2A-re beállítani, mert megfőzte volna ugyanazon motort.
Mindenkinek jó szívvel ajánlom a Wantai vezérlőit, már sokat beépítettem, és mind jól működik, össze sem lehet hasonlítani a TB IC-s vezérlőkkel. Ebayről kínából darabonként megrendelve a legolcsóbb, így vám sem fog terhelni.
Mindenkinek jó szívvel ajánlom a Wantai vezérlőit, már sokat beépítettem, és mind jól működik, össze sem lehet hasonlítani a TB IC-s vezérlőkkel. Ebayről kínából darabonként megrendelve a legolcsóbb, így vám sem fog terhelni.
Cím: Re:Léptetőmotor
Írta: Pali79 Dátum 2018 január 31, 11:45
Írta: Pali79 Dátum 2018 január 31, 11:45
"viszont biztosan nem tudja egyik sem a megadott áramértéket."
Ezt méréssel is alá tudod támasztani vagy csak a melegedéssel?
Ezt méréssel is alá tudod támasztani vagy csak a melegedéssel?
Cím: Re:Léptetőmotor
Írta: istvan3 Dátum 2018 január 31, 11:53
Írta: istvan3 Dátum 2018 január 31, 11:53
Nem mértem, de nincs nyomatéka a motornak, hangosabb sokkal, és fele fordulatot sem tudja mint az említett vezérlővel. Ettől függetlenül tekercselőgépemben használok ilyet, mai napig, oda nem kell nagy sebesség, gyorsulás, de próbáltam már gravírozó és plazmavágó gépbe, oda nem használnám.
3db vezérlőnél az a kb. 10e Ft különbség elhanyagolható összeg szerintem, amennyivel jobb.
3db vezérlőnél az a kb. 10e Ft különbség elhanyagolható összeg szerintem, amennyivel jobb.
Cím: Re:Léptetőmotor
Írta: Pali79 Dátum 2018 január 31, 12:54
Írta: Pali79 Dátum 2018 január 31, 12:54
Lehet veszek én is egyet. De Wantaiban sokkal drábább és ilyet DQ542 jelzéssel találtam. A noname is jó? Az van 4000.- körül? Esetleg egy linket tudsz adni, hogy te pontosan mit vettél?
Cím: Re:Léptetőmotor
Írta: vp0ek7s5 Dátum 2018 január 31, 13:55
Írta: vp0ek7s5 Dátum 2018 január 31, 13:55
Sziasztok. 3db 2A-es Nema17 léptetőmotornak milyen tápot érdemes vennem? Arduinoval lesznek hajtva, könnyű és kicsi lézeres gépen.
Cím: Re:Léptetőmotor
Írta: Peppe51 Dátum 2018 január 31, 14:07
Írta: Peppe51 Dátum 2018 január 31, 14:07
Köszönöm a válaszokat!
A wantai DQ542MA-ben milyen IC van?
Írták, hogy az IC melegét főleg a védő dióda termeli.
Van olyan vezérlő, ahol ezt kivezetik?
A wantai DQ542MA-ben milyen IC van?
Írták, hogy az IC melegét főleg a védő dióda termeli.
Van olyan vezérlő, ahol ezt kivezetik?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2018 január 31, 14:22
Írta: s7manbs8 Dátum 2018 január 31, 14:22
Fogsz egy 500 Ft-os használt PC tápot 12V-ot adsz mneki és kész.
Cím: Re:Léptetőmotor
Írta: vp0ek7s5 Dátum 2018 január 31, 14:28
Írta: vp0ek7s5 Dátum 2018 január 31, 14:28
Oké [#nyes] Én is ilyenben gondolkodtam [#taps]
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2018 február 01, 08:37
Írta: svejk Dátum 2018 február 01, 08:37
Melyik most a "menő" léptetőmotor vezérlő, hagyományos bipoláris motorhoz, ami tudja a 70-80 V-os tápfeszt és 8 A körül?
No és persze délután bemegyek a boltba és megveszem fajta.
Kellene nagy hirtelen 4 db.
Amit látok:
Klavio:
KINCI 2M880N (https://webaruhaz.klavio.hu/?id=85b75cfc564c4822863dbd4884138991&p=termeklap&tkod=1365)
MSDE 80-8,2 (https://webaruhaz.klavio.hu/?id=85b75cfc564c4822863dbd4884138991&p=termeklap&tkod=1199)
Variometrum:
DM860A (https://variometrum.hu/elektronika-kategoria/leptetomotor-meghajto-kategoria/digitalis_bipolaris_leptetomotor_vezerlo_7_2a_80vac_dm860a)
220V-osban 2DM2280 (https://variometrum.hu/elektronika-kategoria/leptetomotor-meghajto-kategoria/bipolaris_leptetomotor_meghajto_8a_230vac_2dm2280)
Egyéb ajánlat?
Lehet ebay-es viszonteladós is, csak azonnal megvehető legyen.
No és persze délután bemegyek a boltba és megveszem fajta.
Kellene nagy hirtelen 4 db.
Amit látok:
Klavio:
KINCI 2M880N (https://webaruhaz.klavio.hu/?id=85b75cfc564c4822863dbd4884138991&p=termeklap&tkod=1365)
MSDE 80-8,2 (https://webaruhaz.klavio.hu/?id=85b75cfc564c4822863dbd4884138991&p=termeklap&tkod=1199)
Variometrum:
DM860A (https://variometrum.hu/elektronika-kategoria/leptetomotor-meghajto-kategoria/digitalis_bipolaris_leptetomotor_vezerlo_7_2a_80vac_dm860a)
220V-osban 2DM2280 (https://variometrum.hu/elektronika-kategoria/leptetomotor-meghajto-kategoria/bipolaris_leptetomotor_meghajto_8a_230vac_2dm2280)
Egyéb ajánlat?
Lehet ebay-es viszonteladós is, csak azonnal megvehető legyen.
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2018 február 01, 09:52
Írta: KBalázs Dátum 2018 február 01, 09:52
A vezérlô IC nem kapcsol nagy áramot, abban diszkrét alkatrészek melegedhetnek (MOSFET-ek).
Itt láthatsz fotót a belsejérôl:
[#t163p9790#]
Itt láthatsz fotót a belsejérôl:
[#t163p9790#]
Cím: Re:Léptetőmotor
Írta: istvan3 Dátum 2018 február 01, 10:07
Írta: istvan3 Dátum 2018 február 01, 10:07
A LeadShine MSDE-8.2 típusúbúl használok egyet, az jól működik. Lépésevesztést is felismeri nagyobb fordulaton.
Cím: Re:Léptetőmotor
Írta: iv43r83d Dátum 2018 február 01, 10:26
Írta: iv43r83d Dátum 2018 február 01, 10:26
Szia! Nekem Variometrumos DM 860A van kifogástalanul működik!
Üdv Csaba!
Üdv Csaba!
Cím: Re:Léptetőmotor
Írta: RJancsi Dátum 2018 február 01, 12:11
Írta: RJancsi Dátum 2018 február 01, 12:11
A jobb felső képet nézve kíváncsi lettem, vajon mit lehet "jumperelni" a kívülről hozzá nem férhető dugaszokkal? [#fejvakaras]
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2018 február 01, 12:50
Írta: KBalázs Dátum 2018 február 01, 12:50
Pl.: fel/lefutó élre léptet-e, illetve forgásirányt lehet invertálni.
Az adatlapja szerint. (http://robokits.download/datasheets/Leadshine%20DM542.pdf)
Az adatlapja szerint. (http://robokits.download/datasheets/Leadshine%20DM542.pdf)
Cím: Re:Léptetőmotor
Írta: RJancsi Dátum 2018 február 01, 13:04
Írta: RJancsi Dátum 2018 február 01, 13:04
Köszi az infót! Nekem külsőre hasonló Wantai-os meghajtóim vannak, nem tudom abban is van-e ilyen. A leírásuk mélyen hallgat róla. De elvagyok velük így is, ezért nem szedem szét a vezérlőt/meghajtókat, csak hogy lássam.
Cím: Re:Léptetőmotor
Írta: Peppe51 Dátum 2018 február 01, 16:21
Írta: Peppe51 Dátum 2018 február 01, 16:21
Köszönöm.
A képről látható, hogy a nagy áramot nem az IC kapcsolja, mint az A4899-ben. Tehát a "dobozos-hűtőbordás" vezérlőkben külön vannak a digitális és erőelemek. Ezért nem melegednek oly nagyon, mint az egy IC-sek.
A képről látható, hogy a nagy áramot nem az IC kapcsolja, mint az A4899-ben. Tehát a "dobozos-hűtőbordás" vezérlőkben külön vannak a digitális és erőelemek. Ezért nem melegednek oly nagyon, mint az egy IC-sek.
Cím: Re:Léptetőmotor
Írta: tj6r3g25 Dátum 2018 február 11, 18:26
Írta: tj6r3g25 Dátum 2018 február 11, 18:26
Sziasztok új kezdő vagyok egyetemes marót szeretnék átépíteni amatőr nc gépre igazándiból ilyen egyszerűbb dolgok megmunkálására gondolok bizonyos egyenesvonalú mozgások és egy egy iv rádius marás esetleg osztókörön való dolgozás ehhez szeretnék infót szerezni milyen motor alkalmas erre mivel lehetne ezeket vezérelni hogy működik ennek programozása ehhez kérném a segítségeteket ! köszönöm előre is
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2018 február 28, 20:06
Írta: zozo Dátum 2018 február 28, 20:06
Vettem egy Nema23 léptetőt, aminek 24 óránként totálisan beáll, szinte megragad a tengelye.
Kell vagy 2Nm nyomaték, mire megindul, aztán utána forog könnyedén.
Aztán áll egy napig, és megint nem lehet megmozdítani, csak bivalyerővel.
Mi a franc baja lehet? Nincs bekötve, nem zárlatos.
Esetleg a mágnese porladt szét és egy nap alatt berendeződnek a porszemek kötésbe? Nem tudok mást elképzelni. Nem akarom szétszedni.
Kell vagy 2Nm nyomaték, mire megindul, aztán utána forog könnyedén.
Aztán áll egy napig, és megint nem lehet megmozdítani, csak bivalyerővel.
Mi a franc baja lehet? Nincs bekötve, nem zárlatos.
Esetleg a mágnese porladt szét és egy nap alatt berendeződnek a porszemek kötésbe? Nem tudok mást elképzelni. Nem akarom szétszedni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2018 február 28, 20:12
Írta: 000000000 Dátum 2018 február 28, 20:12
Erős a gyanúm, hogy csapágyas.
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2018 február 28, 20:15
Írta: jani300 Dátum 2018 február 28, 20:15
Nekem is van egy hasonló problémával rendelkező , érdekel engem is a válasz . De én feladtam már ,de a kíváncsiság azért megvan .
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2018 február 28, 20:15
Írta: zozo Dátum 2018 február 28, 20:15
Ha megindítom, akkor könnyedén lépked, nem rág a csapágy, érezni minden egyes lépés döccenését.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2018 február 28, 20:23
Írta: ANTAL GÁBOR Dátum 2018 február 28, 20:23
Homovits Miklós is panaszkodott a napokban hogy van egy hasonló motorja. Jó lenne a végére járni ! A klasszikus léptecsekben AlNiCo a mágnes , az nem porlad . De vannak Neodymiumos léptecsek is . Nos ott komoly gond lehet a korrozió mert bevonat nélkül a mágnes extrém módon korrodál.
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2018 február 28, 20:24
Írta: zozo Dátum 2018 február 28, 20:24
Ha az eladó hozzájárul, akkor szétszedem, (természetesen a forgórész marad a házban, nem mozdítom axiálisan) aztán kiderül a baja. Főleg azért is, mert amikor be van állva, akkor húzom le a dekniket.
Volt már amit régebben ki tudtam takarítani, bár nem nagyobb a hézag egy tizednél. 8 bar nyomással ki tudtam fújni egy kis törmeléket, aztán levettem a szélen.
Bár annak a motornak elég rövid volt a sztátora, ez meg háromszor hosszabb.
Volt már amit régebben ki tudtam takarítani, bár nem nagyobb a hézag egy tizednél. 8 bar nyomással ki tudtam fújni egy kis törmeléket, aztán levettem a szélen.
Bár annak a motornak elég rövid volt a sztátora, ez meg háromszor hosszabb.
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2018 február 28, 20:28
Írta: jani300 Dátum 2018 február 28, 20:28
Én átkötöttem az unipoláris motort bipoláris párhuzamba ,de előtte is ez volt a baja .
Tehát a hátsó deknit levettem ,de nem volt ott baja a csapágynak . Az viszont lehet hogy megázott .
Tehát a hátsó deknit levettem ,de nem volt ott baja a csapágynak . Az viszont lehet hogy megázott .
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2018 február 28, 20:44
Írta: 000000000 Dátum 2018 február 28, 20:44
A vezetékvégek nem érnek össze?
A léptető, kopott csapággyal, némileg másképp viselkedik mint a szokásos motorok.
De, akár a pajzs is lehet elmozdulva. + társulhat még akár némi csapágykopás is.
Kilazulás után (amikor kézzel könnyen forog) kapcsolj rá áramot. Azt elvéve is nézd meg megszorult e.
Ha igen, akkor teljesen egyértelműen csapágy. Esetleg vasreszelék került bele.
A léptető, kopott csapággyal, némileg másképp viselkedik mint a szokásos motorok.
De, akár a pajzs is lehet elmozdulva. + társulhat még akár némi csapágykopás is.
Kilazulás után (amikor kézzel könnyen forog) kapcsolj rá áramot. Azt elvéve is nézd meg megszorult e.
Ha igen, akkor teljesen egyértelműen csapágy. Esetleg vasreszelék került bele.
Cím: Re:Léptetőmotor
Írta: r6cvn479y Dátum 2018 február 28, 21:10
Írta: r6cvn479y Dátum 2018 február 28, 21:10
Szép estét !
Érdeklődni szeretnék hogy miként kell egy esztergára léptetőmotor méretezni ?
Ean-t szeretnék cnc vezérlésűre megcsinálni
Hosszszánra egy 12Nm es
Keresztszánra egy 4Nm es motort gondoltam
Milyen áttétel szükséges hozzá ?
Előre is köszönöm .
Érdeklődni szeretnék hogy miként kell egy esztergára léptetőmotor méretezni ?
Ean-t szeretnék cnc vezérlésűre megcsinálni
Hosszszánra egy 12Nm es
Keresztszánra egy 4Nm es motort gondoltam
Milyen áttétel szükséges hozzá ?
Előre is köszönöm .
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2018 február 28, 21:13
Írta: zozo Dátum 2018 február 28, 21:13
Természetesen nem fékezem a vezetékek összezárásával :)
Pajzs nem hiszem, hogy elmozdult, úgy nézem, nem volt még szétszedve.
Majd holnap labortápról adok egyik-egyik pólusra áramot, nyolcad-nyolcad fordulatok után. Meglátjuk, leragad-e valahol.
0,4 A árammal forgattam lassan, nem venni észre, hogy bárhol is akadt volna. Kiküldtem neki 32000 step impulzust, pontosan lelépett egy egész kört. (1/16 mikrostep)
Érdekes eset.
Pajzs nem hiszem, hogy elmozdult, úgy nézem, nem volt még szétszedve.
Majd holnap labortápról adok egyik-egyik pólusra áramot, nyolcad-nyolcad fordulatok után. Meglátjuk, leragad-e valahol.
0,4 A árammal forgattam lassan, nem venni észre, hogy bárhol is akadt volna. Kiküldtem neki 32000 step impulzust, pontosan lelépett egy egész kört. (1/16 mikrostep)
Érdekes eset.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2018 február 28, 21:28
Írta: 000000000 Dátum 2018 február 28, 21:28
Én már találkoztam mindkét hibával. És törmelékessel is. A pajzs elmozdulás hiba a kerek motoroknál jellemző. Szögletesnél nem találkoztam vele.
Cím: Re:Léptetőmotor
Írta: svager Dátum 2018 február 28, 21:37
Írta: svager Dátum 2018 február 28, 21:37
Golyósorsó lesz?
Ekkora motorokat nem kell áttételezni,szerintem bőven elég a 8Nm és 3Nm.
Ekkora motorokat nem kell áttételezni,szerintem bőven elég a 8Nm és 3Nm.
Cím: Re:Léptetőmotor
Írta: r6cvn479y Dátum 2018 március 01, 15:31
Írta: r6cvn479y Dátum 2018 március 01, 15:31
Igen lesz golyósorsó
keresztszánra 12/4 es
Hosszánra 16 vagy 20/5 ös
keresztszánra 12/4 es
Hosszánra 16 vagy 20/5 ös
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2018 március 01, 22:52
Írta: zozo Dátum 2018 március 01, 22:52
Akkor most újat fogsz hallani. :)
Szétszedtem a mocit, de előtte adtam áramot az egyik tekercsre, többféle tengelyállásnál. Miután elvettem az áramot, több esetben megragadt kicsit a forgórész.
Ezután szétszedtem. A könnyen forgó tengely azonnal beállt, amint a csavarokat meglazítottam. A dekniket könnyen lehúztam, az elsőt főleg könnyen.
Danibá, erre céloztam az első mondatban, szögletes motor, és lötyögős deknivel!
Ha megnézed a képet, a deknit semmi más nem vezeti meg, mint a 0,8 mm falvastagságú műanyag "csévetest"
A hengeresnél legalább kettő esztergált, egymásba illesztett felület van...
A csapágyak szárazak, de nem rágnak.
Aztán jött a második rácsodálkozás, miután a lupémmal belekukucskáltam. Dzsuva bőven van a bordák, "ricnik" között. A légrés kevesebb mint 0,1 mm, még egy újságpapír sem fér közé, kifújni sűrített levegővel nem tudtam belőle semmit. Kár, hogy nem szabad kivenni a belőlük a forgórészt :)
Aztán látható még, hogy a forgórész egy helyen beleért az állórészbe, koptatta azt, vagyis excenteresen helyezkedett el a házban. A dekni bizony engedi van bő 1 tized lötyögése.
Ezenkívűl látható felhólyagosodott festék is belül, ami arra utal, hogy túlmelegedhetett a motor.
Tehát a tengely megragadás okának a következőt vélem:
-A forgórészen századnyi fémpor réteg ül. Forgatáskor ez feltorlódik valamelyik élen, kicsit fékezve azt, de engedi forogni. Hosszabb állás után a fémpor berendeződik a forgórész és a hozzá közelebb lévő test közé, így teljesen összetapad a két felület egy kis sávban.
Vagy: van ugye egy századnyi rés az egyik oldalon, a motor futása közben, -aztán mikor pihen, azt a századot rugalmasan leküzdi a mágneses erő, és egy idő után összetapad a két felület. Mindenképp a központosság hiánya a fő gond.
Képek:
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_p9ssfnzqysabspzg8qqc_2204.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/p9ssfnzqysabspzg8qqc_2204.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_nks7yk22st7xiti3es0m_2204.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/nks7yk22st7xiti3es0m_2204.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_ascwqmuwsmsswsptxfhg_2204.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/ascwqmuwsmsswsptxfhg_2204.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_k8etgdmkmeewd2f698fs_2204.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/k8etgdmkmeewd2f698fs_2204.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_auycst6sefcdquuyeq33y_2204.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/auycst6sefcdquuyeq33y_2204.jpg)
Szétszedtem a mocit, de előtte adtam áramot az egyik tekercsre, többféle tengelyállásnál. Miután elvettem az áramot, több esetben megragadt kicsit a forgórész.
Ezután szétszedtem. A könnyen forgó tengely azonnal beállt, amint a csavarokat meglazítottam. A dekniket könnyen lehúztam, az elsőt főleg könnyen.
Danibá, erre céloztam az első mondatban, szögletes motor, és lötyögős deknivel!
Ha megnézed a képet, a deknit semmi más nem vezeti meg, mint a 0,8 mm falvastagságú műanyag "csévetest"
A hengeresnél legalább kettő esztergált, egymásba illesztett felület van...
A csapágyak szárazak, de nem rágnak.
Aztán jött a második rácsodálkozás, miután a lupémmal belekukucskáltam. Dzsuva bőven van a bordák, "ricnik" között. A légrés kevesebb mint 0,1 mm, még egy újságpapír sem fér közé, kifújni sűrített levegővel nem tudtam belőle semmit. Kár, hogy nem szabad kivenni a belőlük a forgórészt :)
Aztán látható még, hogy a forgórész egy helyen beleért az állórészbe, koptatta azt, vagyis excenteresen helyezkedett el a házban. A dekni bizony engedi van bő 1 tized lötyögése.
Ezenkívűl látható felhólyagosodott festék is belül, ami arra utal, hogy túlmelegedhetett a motor.
Tehát a tengely megragadás okának a következőt vélem:
-A forgórészen századnyi fémpor réteg ül. Forgatáskor ez feltorlódik valamelyik élen, kicsit fékezve azt, de engedi forogni. Hosszabb állás után a fémpor berendeződik a forgórész és a hozzá közelebb lévő test közé, így teljesen összetapad a két felület egy kis sávban.
Vagy: van ugye egy századnyi rés az egyik oldalon, a motor futása közben, -aztán mikor pihen, azt a századot rugalmasan leküzdi a mágneses erő, és egy idő után összetapad a két felület. Mindenképp a központosság hiánya a fő gond.
Képek:
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_p9ssfnzqysabspzg8qqc_2204.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/p9ssfnzqysabspzg8qqc_2204.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_nks7yk22st7xiti3es0m_2204.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/nks7yk22st7xiti3es0m_2204.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_ascwqmuwsmsswsptxfhg_2204.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/ascwqmuwsmsswsptxfhg_2204.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_k8etgdmkmeewd2f698fs_2204.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/k8etgdmkmeewd2f698fs_2204.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_auycst6sefcdquuyeq33y_2204.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/auycst6sefcdquuyeq33y_2204.jpg)
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2018 március 02, 09:08
Írta: ANTAL GÁBOR Dátum 2018 március 02, 09:08
Gondolom kínai a motor . Látom amint ül a kis kínai és a kezében egy kalapács amivel kopogtatja a lazán lehúzott deklit és próbálja forgatni a tengelyt aztán amikor forog akkor gyorsan lehúzza a csavarokat . Ha sikerül lehúzni és forog akkor Ok ha nem akkor vagy beteszi a készek közé ( mert már nagyon unja vagy kezdi elölről ( gondolom inkább beteszi , majd forog az ha megkapja a delejt felkiáltással )
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2018 március 02, 10:18
Írta: Rabb Ferenc Dátum 2018 március 02, 10:18
Ezt a "kopogtatós" módszert kipróbáltam. Nem tartom sem jónak, sem eredményesnek.
De akkor hogy a viharba lehet újra központosítani a pajzsokat egy csapágycsere után?
Esetleg... az állórész vastestet fixen lerögzíteni, és mindkét pajzsot X-Y irányban állítócsavarokkal finoman mozgatva (esetleg kiórázva) beállítani a pontos helyzetet. Aztán megtépni a rögzítő csavarokat [#nemtudom]
De akkor hogy a viharba lehet újra központosítani a pajzsokat egy csapágycsere után?
Esetleg... az állórész vastestet fixen lerögzíteni, és mindkét pajzsot X-Y irányban állítócsavarokkal finoman mozgatva (esetleg kiórázva) beállítani a pontos helyzetet. Aztán megtépni a rögzítő csavarokat [#nemtudom]
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2018 március 02, 10:28
Írta: Szalai György Dátum 2018 március 02, 10:28
A laza összerakás és forgatás közbeni kocogtatás leginkább a háromfázisú, rövidrezárt forgórészű, indukciós motorok összerakására való.
A forgó mágneses tér középre vezeti a forgórészt.
Mágneses forgórészű motorokat csak a forgórészt középre kényszerítve lehet jól összerakni.
Nem véletlen van a jobbakban megvezető perem, ami ezt pontosan, passzosan elvégzi.
Az olcsók. . . Hát, azok meg olcsók.
A forgó mágneses tér középre vezeti a forgórészt.
Mágneses forgórészű motorokat csak a forgórészt középre kényszerítve lehet jól összerakni.
Nem véletlen van a jobbakban megvezető perem, ami ezt pontosan, passzosan elvégzi.
Az olcsók. . . Hát, azok meg olcsók.
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2018 március 02, 10:45
Írta: Rabb Ferenc Dátum 2018 március 02, 10:45
De az olcsókat is valahogyan összerakták! Bizonyára gyorsan, olcsón - de jól. Csak a csapágy élettartama véges. Na itt kezdődnek a bajok... És a hogyan továbbra Te sem adtál választ.
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2018 március 02, 10:54
Írta: zozo Dátum 2018 március 02, 10:54
Szerintem új korábban passzol ám a dekni a műanyag keretre!
Mivel ez a motor valószínűleg túlmelegedett, a műanyag csévetest is deformálódott. Sztem hőre lágyuló lehet.
Az is lehet, hogy üzemi hőfokon is deformálódik egy idő után, ezért szétszedve már nem lehet ugyanúgy visszatenni.
Mivel ez a motor valószínűleg túlmelegedett, a műanyag csévetest is deformálódott. Sztem hőre lágyuló lehet.
Az is lehet, hogy üzemi hőfokon is deformálódik egy idő után, ezért szétszedve már nem lehet ugyanúgy visszatenni.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2018 március 02, 11:04
Írta: Szalai György Dátum 2018 március 02, 11:04
A hogyan továbbra azt mondom, veszek egy használt márkás motort, ezt meg. . .
Mert már most is több nehézséget okozott, mint amennyit megoldott és ez csak egyre inkább így lesz.
A pacific scientific motor meg örök, a szamárium kobalt mágnesével.
A csapágy élettartama ezen a fordulaton és terhelésen örök utáni kéne legyen.
Ha az miatt van a baj, akkor rég rossz.
Ez a motor eredendően és javíthatatlanul ócska.
Ócska a csapágy, ócska a vas, ócska a megmunkálás.
Kínlódni persze mindég lehet vele.
Mert már most is több nehézséget okozott, mint amennyit megoldott és ez csak egyre inkább így lesz.
A pacific scientific motor meg örök, a szamárium kobalt mágnesével.
A csapágy élettartama ezen a fordulaton és terhelésen örök utáni kéne legyen.
Ha az miatt van a baj, akkor rég rossz.
Ez a motor eredendően és javíthatatlanul ócska.
Ócska a csapágy, ócska a vas, ócska a megmunkálás.
Kínlódni persze mindég lehet vele.
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 02, 11:37
Írta: J-Steel Dátum 2018 március 02, 11:37
Zozo!
Tegnap olvastam a hozzászólásodat a szétszedéssel kapcsolatban, de valamit nem értettem meg.
Levetted a két végén a két alut ami a csapágyokkal tartja a forgórészt. És írtad, hogy..
"ricnik" között. A légrés kevesebb mint 0,1 mm
Az álló és forgórész között gondoltad vagy hol? Azért kérdezem, mert ha leveszem a két oldalon a csapágyat, akkor a forgórészen a mágnes miatt odaragad az állórészhez. Igazából a tényt, hogy nem középen van, nem is tudom kideríteni, mert akkor mindkét oldalról fel kell tenni az alut, de akkor nem lát bele az ember.
Mit értettél azalatt, hogy "Kár, hogy nem szabad kivenni a belőlük a forgórészt"? Nem tettél fel képet csak a forgórészről, akkor nem húztad ki? De akkor hogy fújtál bele kompresszorral?
Tegnap olvastam a hozzászólásodat a szétszedéssel kapcsolatban, de valamit nem értettem meg.
Levetted a két végén a két alut ami a csapágyokkal tartja a forgórészt. És írtad, hogy..
"ricnik" között. A légrés kevesebb mint 0,1 mm
Az álló és forgórész között gondoltad vagy hol? Azért kérdezem, mert ha leveszem a két oldalon a csapágyat, akkor a forgórészen a mágnes miatt odaragad az állórészhez. Igazából a tényt, hogy nem középen van, nem is tudom kideríteni, mert akkor mindkét oldalról fel kell tenni az alut, de akkor nem lát bele az ember.
Mit értettél azalatt, hogy "Kár, hogy nem szabad kivenni a belőlük a forgórészt"? Nem tettél fel képet csak a forgórészről, akkor nem húztad ki? De akkor hogy fújtál bele kompresszorral?
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2018 március 02, 12:04
Írta: jani300 Dátum 2018 március 02, 12:04
Tényleg nem olvasod a fórumot .
Azért nem kellene kivenni a forgórészt mert el fog utána gyengülni a motor .
Egyébként ki lehet, csak nem érdemes , próbálkozni .
Azért nem kellene kivenni a forgórészt mert el fog utána gyengülni a motor .
Egyébként ki lehet, csak nem érdemes , próbálkozni .
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2018 március 02, 12:06
Írta: Kristály Árpád Dátum 2018 március 02, 12:06
Halihóóó...
Egy kicsit godolkozol.....
A hézag osztva kettővel... s lás csodát annyi![#worship]
Ha vissza szereled a pajzsokat beáll a gyári hézag...[#integet2]
Szerintem ha vaspor van benne...nem igazán tudod kifújni, csak valami oltári nyomással...[#nemtudom]
Persze szemüveg használata kötelezŐŐŐŐ![#worship]
Üdv.: Árpád
Apropóóóó
Milyen motorról van szó? Dobj egy képet, lehet, hogy tudok segíteni...
(Cseredarab)[#worship]
Egy kicsit godolkozol.....
A hézag osztva kettővel... s lás csodát annyi![#worship]
Ha vissza szereled a pajzsokat beáll a gyári hézag...[#integet2]
Szerintem ha vaspor van benne...nem igazán tudod kifújni, csak valami oltári nyomással...[#nemtudom]
Persze szemüveg használata kötelezŐŐŐŐ![#worship]
Üdv.: Árpád
Apropóóóó
Milyen motorról van szó? Dobj egy képet, lehet, hogy tudok segíteni...
(Cseredarab)[#worship]
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 02, 12:16
Írta: J-Steel Dátum 2018 március 02, 12:16
Én kivettem a forgórészt a 2,5Nm-es 4A-es motoromból. Többször is, mert vizsgálódtam valamin. Utána összerakatam és lemértem a nyomatékot és ugyanúgy tudta a 2,5Nm-ert álló helyzetben.
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2018 március 02, 12:19
Írta: jani300 Dátum 2018 március 02, 12:19
Akkor az olyan ami nem veszít a mágnesességéből !
Lehet csak városi legenda az egész ?
Mások meg vacakolnak itt "csőbehúzzák" szerencsétlen forgórészt ... :)
Lehet csak városi legenda az egész ?
Mások meg vacakolnak itt "csőbehúzzák" szerencsétlen forgórészt ... :)
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 02, 12:20
Írta: J-Steel Dátum 2018 március 02, 12:20
A recék közül a vasreszeléket kiszedni tényleg nehéz. Nekem BLDC motornál a mágnesek közti reszeléket kellett volna kiszedni, de nem volt ötletem.
Aztán a youtube-on valaki használt gyúrma szerű anyagot. Olyat, ami ragadós, de nem nyúlós. Benyomta a mágnesek közé, a vaspor ráragadt, és amikor elhúzta jöttek a vasreszelékek vele.
Aztán a youtube-on valaki használt gyúrma szerű anyagot. Olyat, ami ragadós, de nem nyúlós. Benyomta a mágnesek közé, a vaspor ráragadt, és amikor elhúzta jöttek a vasreszelékek vele.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2018 március 02, 12:22
Írta: s7manbs8 Dátum 2018 március 02, 12:22
Lehet hogy úgy kell kivenni, hogy a kivételi előtolási sebesség ne legyen nagyobb, mint 10mm/perc, ekkor megmarad a térerő. :)
J-Steel, meg még nagyon óvatos, így szerencséje volt lehet. :)
J-Steel, meg még nagyon óvatos, így szerencséje volt lehet. :)
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 02, 12:22
Írta: J-Steel Dátum 2018 március 02, 12:22
Valaki feldobta a külföldi fórumon, hogy neki a tengely hajlott meg. Ő később bevallotta, hogy a motort feszegette.
Ennek eredménye az volt, hogy forgás közben rázkódott. De mivel nem volt büdzséje, ezért úgy döntött tovább használja.
Ennek eredménye az volt, hogy forgás közben rázkódott. De mivel nem volt büdzséje, ezért úgy döntött tovább használja.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2018 március 02, 12:24
Írta: s7manbs8 Dátum 2018 március 02, 12:24
Központosan betenni a forgórészt is lehet úgy kellene, hogy előtte bekenjük egy vastagabb lakkréteggel és úgy betenni, akkor majd mozgás közben a felesleget ledúrja a motor, de legalább középen van. :)
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 02, 12:29
Írta: J-Steel Dátum 2018 március 02, 12:29
Nem így történt.
Most váltsunk komolyra.
Úgy történt, hogy miután kivettem a csavarokat, nem tudtam szétszedni, mert gondolom a ragasztás ott tartotta. Ekkor fogtam a műanyag fejű kakapácsot, és ráüttöttem azon az oldalon amelyiken a vezeték jön ki. (már tanultam belőle kisebb motornál, hogy a másik oldalon ütve letépi a műanyag egyik felét). Az ütés hatására alumíniummal-csapággyal együtt kihullott a forgórész és az ölembe esett.
Visrosszakáskor is kopogtattam egy picit, hogy rendesen bemenjen a csapágyba. Nem simogattam, nem lacafacáztam.
Hallottam róla, hogy a mágnesek veszítenek mágnesességükből, ha odacsapja valahova az ember, de nagyon nem izgatott a dolog. A mérés igazolta, hogy a Nm megmaradt.
Most váltsunk komolyra.
Úgy történt, hogy miután kivettem a csavarokat, nem tudtam szétszedni, mert gondolom a ragasztás ott tartotta. Ekkor fogtam a műanyag fejű kakapácsot, és ráüttöttem azon az oldalon amelyiken a vezeték jön ki. (már tanultam belőle kisebb motornál, hogy a másik oldalon ütve letépi a műanyag egyik felét). Az ütés hatására alumíniummal-csapággyal együtt kihullott a forgórész és az ölembe esett.
Visrosszakáskor is kopogtattam egy picit, hogy rendesen bemenjen a csapágyba. Nem simogattam, nem lacafacáztam.
Hallottam róla, hogy a mágnesek veszítenek mágnesességükből, ha odacsapja valahova az ember, de nagyon nem izgatott a dolog. A mérés igazolta, hogy a Nm megmaradt.
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 02, 12:31
Írta: J-Steel Dátum 2018 március 02, 12:31
Megj. Nekem olyan motorom van, hogy mindkét végéből kiáll a tengely.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2018 március 02, 13:09
Írta: ANTAL GÁBOR Dátum 2018 március 02, 13:09
Én meg csináltam egy másik kísérletet . Egy léptetőt megpörgettem az esztergán ( generátorként ) tettem rá valamilyen reális terhelést és különböző fordulaton megmértem az üresjárási ás a terheléssel leadott feszültséget
Aztán óvatosan csőbe húztam és vissza . Újra mértem .. Majd lazán kihúztam és vissza . Megint mértem Az eredmények siralmasak : a csőbehúzással is veszített a mágnesességből Fizikailag nem lehetett úgy csőbe húzni hogy abs tökéletes legyen ( pedig cél csövet esztergáltam ) Az eredmények meg vannak de kb 25 % al volt kisebb a kapott fesz a csőbe húzáskor es 40 % al amikor kikerült a szabad térbe . Vagyis lecsökkent a B
A kommersz léptecsket ALNiCo mágnessel szerelik ( Meg lehet nézni az un demagnetizációs görbét) Találkoztam egyszer neodymiumos lépteccsel de annak az adatlapján a gyártó büszkén hirdette is azt
Szerintem a generátoros mérés korrektebb mint a tartó nyomaték mérése
Aztán óvatosan csőbe húztam és vissza . Újra mértem .. Majd lazán kihúztam és vissza . Megint mértem Az eredmények siralmasak : a csőbehúzással is veszített a mágnesességből Fizikailag nem lehetett úgy csőbe húzni hogy abs tökéletes legyen ( pedig cél csövet esztergáltam ) Az eredmények meg vannak de kb 25 % al volt kisebb a kapott fesz a csőbe húzáskor es 40 % al amikor kikerült a szabad térbe . Vagyis lecsökkent a B
A kommersz léptecsket ALNiCo mágnessel szerelik ( Meg lehet nézni az un demagnetizációs görbét) Találkoztam egyszer neodymiumos lépteccsel de annak az adatlapján a gyártó büszkén hirdette is azt
Szerintem a generátoros mérés korrektebb mint a tartó nyomaték mérése
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 02, 13:19
Írta: J-Steel Dátum 2018 március 02, 13:19
Ez nagyon jó hír!!! (nekem)
Ezzel le lehet csökkenteni a léptető motor indukált feszültségét, így alacsonyabb feszültségű tápról is lehet járatni.
Való igaz én statikus mérést végeztem, dinamikusban eszembe sem jutott. Bár a generátoros feszültségcsökkenést még nem írnám a nyomatékvesztés javára!
Ezzel le lehet csökkenteni a léptető motor indukált feszültségét, így alacsonyabb feszültségű tápról is lehet járatni.
Való igaz én statikus mérést végeztem, dinamikusban eszembe sem jutott. Bár a generátoros feszültségcsökkenést még nem írnám a nyomatékvesztés javára!
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 02, 13:20
Írta: J-Steel Dátum 2018 március 02, 13:20
Ha hazamegyek ki is kapom a rotort a 9,5Nm-es nagynyomatékú motoromból!
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2018 március 02, 13:23
Írta: jani300 Dátum 2018 március 02, 13:23
Az előbb akartam írni hogy később szoktak jönni a szakik ,kapsz majd :)
De ez jobb azért !
Mindjárt állok is neki ,kihúzgálom az öreg motorjaim forgórészét [#csodalk]
Tudtad űberelni az előzőt :)
De ez jobb azért !
Mindjárt állok is neki ,kihúzgálom az öreg motorjaim forgórészét [#csodalk]
Tudtad űberelni az előzőt :)
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 02, 13:29
Írta: J-Steel Dátum 2018 március 02, 13:29
Hobbioldalon szabad árral szemben úszni. Azért hobbi.
Ha a cégnél csinálom, aminél dolgozom, akkor nem számolok be az eredményről, hogy az év végi értékelésnél a prémium ne maradjon el. :)
Motort még nem égettem le (ellentétben pár kollégával). Olyan már viszont volt, hogy nem vettem észre, hogy a tonnás pozíciószabályzó kocsija nekiütközött a golyósorsó végéhez, (egymás alatt voltak) és leszakította a 14-es és csavart furatot ami azt tartotta.
Ha a cégnél csinálom, aminél dolgozom, akkor nem számolok be az eredményről, hogy az év végi értékelésnél a prémium ne maradjon el. :)
Motort még nem égettem le (ellentétben pár kollégával). Olyan már viszont volt, hogy nem vettem észre, hogy a tonnás pozíciószabályzó kocsija nekiütközött a golyósorsó végéhez, (egymás alatt voltak) és leszakította a 14-es és csavart furatot ami azt tartotta.
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 02, 13:30
Írta: J-Steel Dátum 2018 március 02, 13:30
* 14-es csavar(okat) (2db) és furatokat ami a kocsit tartotta
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2018 március 02, 13:38
Írta: jani300 Dátum 2018 március 02, 13:38
AHA !
Tehát akkor direkt csinálod ?
Valami itt nem kerek :)
Tehát akkor direkt csinálod ?
Valami itt nem kerek :)
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 02, 13:46
Írta: J-Steel Dátum 2018 március 02, 13:46
Mármint mi? A szakadás?
Nem volt direkt. A lakatos mondta, hogy mozgassam felfelé a kocsit, mert hátulról be akar csavarni egy imbuszcsavart, de abban a pozícióban nem fér hozzá. (azt tudni kell, hogy az egész gépért ők felelnek, tehát én tulképp nekik dolgoztam)
Erre hallotunk egy reccccssst. Azonnal stop. Nagyon hangos volt, és furcsa, hogy a mozgás fent volt a reccs meg lent. Mondom a lakatosnak, hogy most mi legyen ő látott-e valamit. Erre azt mondta nem. Jó akkor óvatosan engedem tovább. Ő figyelt, és egyszer csak bumm, kiszakadt a kocsi.
Egy pici 350W-os aszinkron motor hajtott valami ordenáré nagy csigahajtást, ami aztán egy 5mm-es emelkedésu D25-ös golyósorsót hajtott.
Nem volt direkt. A lakatos mondta, hogy mozgassam felfelé a kocsit, mert hátulról be akar csavarni egy imbuszcsavart, de abban a pozícióban nem fér hozzá. (azt tudni kell, hogy az egész gépért ők felelnek, tehát én tulképp nekik dolgoztam)
Erre hallotunk egy reccccssst. Azonnal stop. Nagyon hangos volt, és furcsa, hogy a mozgás fent volt a reccs meg lent. Mondom a lakatosnak, hogy most mi legyen ő látott-e valamit. Erre azt mondta nem. Jó akkor óvatosan engedem tovább. Ő figyelt, és egyszer csak bumm, kiszakadt a kocsi.
Egy pici 350W-os aszinkron motor hajtott valami ordenáré nagy csigahajtást, ami aztán egy 5mm-es emelkedésu D25-ös golyósorsót hajtott.
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2018 március 02, 14:02
Írta: zozo Dátum 2018 március 02, 14:02
J-Steel:
A légrést a forgórész és állórész magja között mértem, ott, ahol a legnagyobb volt. A 0,9-es hézagmérőt tudtam csak beletuszkolni, tehát összeszerelve ~5 század csupán körkörösen a légrés.
Kompresszorral a ricnik közét próbáltam kifújni, 1mm-es fúvókát téve a tömlőre, de hiába.
Árpi bá':
Köszönöm a felajánlott segítséget, de a fórumos eladó amint olvasta a topikot, azzonal becsomagolt egy másik példányt és elküldte nekem térítés mentesen. Ma meg is kaptam egy szépen szaladó példányt.
A légrést a forgórész és állórész magja között mértem, ott, ahol a legnagyobb volt. A 0,9-es hézagmérőt tudtam csak beletuszkolni, tehát összeszerelve ~5 század csupán körkörösen a légrés.
Kompresszorral a ricnik közét próbáltam kifújni, 1mm-es fúvókát téve a tömlőre, de hiába.
Árpi bá':
Köszönöm a felajánlott segítséget, de a fórumos eladó amint olvasta a topikot, azzonal becsomagolt egy másik példányt és elküldte nekem térítés mentesen. Ma meg is kaptam egy szépen szaladó példányt.
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2018 március 02, 14:07
Írta: jani300 Dátum 2018 március 02, 14:07
Csak pici volt az a hajtómű ,nem volt elég nagy a vesztesége ,maradt elég ,szaggatni .
Egyedül szeretek dolgozni .
Nincsen úgyse sok eszem ,az kéne még hogy segítsenek is :)
Egyedül szeretek dolgozni .
Nincsen úgyse sok eszem ,az kéne még hogy segítsenek is :)
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 02, 14:09
Írta: J-Steel Dátum 2018 március 02, 14:09
Úgy érted 0,09mm-es hézagmérő. Az tényleg nem sok.
Ha úgyis szétszedem az enyémet megint, akkor majd én is megmérem. Én nem emlékszem ilyen kis hézagra.
Ha úgyis szétszedem az enyémet megint, akkor majd én is megmérem. Én nem emlékszem ilyen kis hézagra.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2018 március 02, 14:27
Írta: ANTAL GÁBOR Dátum 2018 március 02, 14:27
Node akkor a gyár miért cicózik hogy zárt vaskörben mágnesez ?. Meg miért alkalmaz ALNiCo mágnest ?? ( aminek a zárt vaskörben mért indukciója NAGYOBB!! mint a neodímiumé) Meg kell nézni az előbb is idézett demagnetizációs görbét ! Ha cél lenne hogy kicsi legyen a B akkor egyszerűen stroncium ferrit mágnest alkalmaznának.
A neodímium meg drága és mint említettem kissé még gyengébb is ( és a hőtűrő képessége is nagyon alacsony )
A neodímium meg drága és mint említettem kissé még gyengébb is ( és a hőtűrő képessége is nagyon alacsony )
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 02, 14:42
Írta: J-Steel Dátum 2018 március 02, 14:42
Ennek a mágnesnek köszönhetem, hogy sokpólusú szinkronmotorként tudom járatni a léptetőt az egyedi vezérlésemmel. Ha nem lenne mágnes benne, akkor megszűnne az átmenet két fő lépés között, mert a reluktancia egyből berántaná.
Ez nem válasz a kérdésre, tudom jól.
Ez nem válasz a kérdésre, tudom jól.
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2018 március 02, 14:47
Írta: zozo Dátum 2018 március 02, 14:47
Bocs, lemaradt előle egy nulla, igen, 0,09 mm a legnagyobb hézag, de gyárilag 0,1 lehet, csak íves felületen nehéz a hézagmérőt betolni.
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2018 március 02, 15:27
Írta: jani300 Dátum 2018 március 02, 15:27
Már előzőleg akartam kérdezni hogy l297-el vezérled a végfokokat , vagy valami mással .
Van gyári kétmotoros vezérlőm ilyesmi ,de az csak féllépést tud .
Én ,vettem DQ860MA-t egyszer már csak kipróbálom reszelővel .
Van gyári kétmotoros vezérlőm ilyesmi ,de az csak féllépést tud .
Én ,vettem DQ860MA-t egyszer már csak kipróbálom reszelővel .
Cím: Re:Léptetőmotor
Írta: Kristály Árpád Dátum 2018 március 02, 15:32
Írta: Kristály Árpád Dátum 2018 március 02, 15:32
[#worship][#worship][#worship][#integet2]
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 02, 15:50
Írta: J-Steel Dátum 2018 március 02, 15:50
Nem L297. Saját készítésű logika vezérli (FPGA) - olyasmi a logikája mint az A300 vezérlőnek amit a másik topicban tárgyalunk.
A motoron van egy encoder, ez alapján tudja, hogy pontosan hogy áll a rotor. Én annyit csinálok, hogy mindig 90 fokkal arréb gerjesztem, így létrehozva a forgatónyomatékot. Olyan ez mint az egyenáramú motornál, ahol a szénkefék kialakítása miatt mindig 90 fok körül van a gerjesztés.
Az encoder jele miatt tud tökéletesen fordulatszámot tartani, és pozicionálni is. Mivel nem stepper módban van vezérelve, nincs lépésvesztés.
Majd tovább bővítem, hogy feldolgozza a step/dir jeleket amit a mach3-tól fog kapni, de még ott nem tartok.
A motoron van egy encoder, ez alapján tudja, hogy pontosan hogy áll a rotor. Én annyit csinálok, hogy mindig 90 fokkal arréb gerjesztem, így létrehozva a forgatónyomatékot. Olyan ez mint az egyenáramú motornál, ahol a szénkefék kialakítása miatt mindig 90 fok körül van a gerjesztés.
Az encoder jele miatt tud tökéletesen fordulatszámot tartani, és pozicionálni is. Mivel nem stepper módban van vezérelve, nincs lépésvesztés.
Majd tovább bővítem, hogy feldolgozza a step/dir jeleket amit a mach3-tól fog kapni, de még ott nem tartok.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2018 március 02, 16:01
Írta: ANTAL GÁBOR Dátum 2018 március 02, 16:01
A Granite devices ( finn ) vezérlő is 2 fázisú sokpólusú szinkronmotor modellt csinált . Ismered? Szívesen kipróbálnám a tiédet is.. Mennyibe kerülne ? ( a végfokot meg is tudnám csinálni ) Küldhetnél egy "agyat " Persze fontos lenne hogy tudja a ( klasszikus ) step üzemet
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2018 március 02, 16:08
Írta: jani300 Dátum 2018 március 02, 16:08
Rendben .
Léptetőmotor topik , azért gondoltam hogy valami step-dir es vezérlő .
Lusta voltam először kikeresni az IC típusát , pedig kellet volna . Másképp néz azért ki így a dolog .
Léptetőmotor topik , azért gondoltam hogy valami step-dir es vezérlő .
Lusta voltam először kikeresni az IC típusát , pedig kellet volna . Másképp néz azért ki így a dolog .
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 02, 16:14
Írta: J-Steel Dátum 2018 március 02, 16:14
Az előbb lemaradt a matematikai rész, meg rajzoltam is.
A 90-fokkal odébb gerjesztem matematikailag azt jelenti, hogy van egy szinusz tábla az IC-ben elmentve. Megnézi, hogy most hol áll az encoder (rotor), abbol visszaszámolja elektromos melyik gerjesztési foknál áll a rotor, majd hozzáad vagy elvesz 90 fokot (aszerint melyik irányba kell forognia), kiolvassa a táblázatból az értéket, megszorozza a PI (PID, differenciális tag nélkül) szabályzó kimenetével (ezt teszi a fordulatszám szabályzás miatt) és azt adja a motorra. A PWM 10kHz-en dolgozik, tehát ez az egész számolgatás 1s/10kHz = 10us alatt megtörténik.
Elvi diagram képe lent van.
Nagyon szívesen küldök egyet, de kompletten motorral, a múltkor amikor privát üzeneteztünk, gondoltam is rá, hogy felajánlom, de gondoltam inkább megvárom, míg lesz érdeklődés.
A step dir beírása a kódba 2 perc, az nem okoz gondot.
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_070ivasbspm3c2gvuj6p_4880.png) (https://hobbicncforum.hu/uploaded_images/2018/03/070ivasbspm3c2gvuj6p_4880.png)
A 90-fokkal odébb gerjesztem matematikailag azt jelenti, hogy van egy szinusz tábla az IC-ben elmentve. Megnézi, hogy most hol áll az encoder (rotor), abbol visszaszámolja elektromos melyik gerjesztési foknál áll a rotor, majd hozzáad vagy elvesz 90 fokot (aszerint melyik irányba kell forognia), kiolvassa a táblázatból az értéket, megszorozza a PI (PID, differenciális tag nélkül) szabályzó kimenetével (ezt teszi a fordulatszám szabályzás miatt) és azt adja a motorra. A PWM 10kHz-en dolgozik, tehát ez az egész számolgatás 1s/10kHz = 10us alatt megtörténik.
Elvi diagram képe lent van.
Nagyon szívesen küldök egyet, de kompletten motorral, a múltkor amikor privát üzeneteztünk, gondoltam is rá, hogy felajánlom, de gondoltam inkább megvárom, míg lesz érdeklődés.
A step dir beírása a kódba 2 perc, az nem okoz gondot.
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_070ivasbspm3c2gvuj6p_4880.png) (https://hobbicncforum.hu/uploaded_images/2018/03/070ivasbspm3c2gvuj6p_4880.png)
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 02, 16:19
Írta: J-Steel Dátum 2018 március 02, 16:19
Granit devices? Még nem hallottam róluk. Pont Tamperében, ahol a főhasziálásuk van a Google szerint, voltam tavaly több mint egy hónapot, és helyeztem üzembe egy gyártógépet.
Majd ha megint hívnak, hogy változtatni kell a PLC programon lehet beugrok hozzájuk is. :)
Majd ha megint hívnak, hogy változtatni kell a PLC programon lehet beugrok hozzájuk is. :)
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2018 március 02, 16:40
Írta: ANTAL GÁBOR Dátum 2018 március 02, 16:40
Érdemes rákeresni . Olyan drivert csinál amiben 2 H híd van ezeket kombinálja Dc motorhoz egyet használ ( de akár a meglévőket párhuzamba köti ) Ac szervóhoz, Brushless hez 1.5 H híd van használva Léptecshez meg mind a kettő .
Annó vettem egyet és sokat játszottam vele . A fórumon 1-2 ember használja . Hízó Józsi kötött velük egy szerződést nála forintért is meg lehet venni ( én közvetlenül Finnországból rendeletem mert akkor még Józsi nem üzletelt velük)
Keressek típusszámot? De a Dolphincam on ( Józsi ) is megleled.
Annó vettem egyet és sokat játszottam vele . A fórumon 1-2 ember használja . Hízó Józsi kötött velük egy szerződést nála forintért is meg lehet venni ( én közvetlenül Finnországból rendeletem mert akkor még Józsi nem üzletelt velük)
Keressek típusszámot? De a Dolphincam on ( Józsi ) is megleled.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2018 március 03, 07:08
Írta: ANTAL GÁBOR Dátum 2018 március 03, 07:08
Előkerestem a generátoros léptecsmérésem papírját
390 ohmos ellenállással terheltem a léptecs egyik fázisát
az adatok ( V )
10Hz 6.66 5.13 4.05
12Hz 7.95 6.16 4.60
14Hz 9.32 7.15 5.03
16Hz 10.72 8.16 5.33
18Hz 12.02 9.14 5.66
Az első oszlopban az esztergát forgató frekiváltó névleges frekvenciája szerepel ( 10Hz megfelel 57 1/ min nek )
A második oszlopban a gyári állapotú motor feszültsége látható
A harmadik oszlopban az óvatosan csőbehúzott majd visszahelyezett forgórész feszültség adatai szerepelnek . A negyedik oszlopban a levegőre kivett és visszahelyezett forgórésszel történt a mérés
Megállapítások : a csőbehúzással kb 77 % ra esett le a B
A teljes kivételnél (átlagosan ) az 53 % ára . A fordulatszám indukált feszültség a nyers motornál lineáris , a csőbe húzottnál is , viszont a levegőre kivett forgórész nagyobb fordulatoknál már csökkenő feszültséget eredményez
Megállapítás 2 . A kommersz léptetők ( ALNiCo mágnessel vannak szerelve ) IGENIS lemágneseződnek ha kihúzzuk a forgórészt
390 ohmos ellenállással terheltem a léptecs egyik fázisát
az adatok ( V )
10Hz 6.66 5.13 4.05
12Hz 7.95 6.16 4.60
14Hz 9.32 7.15 5.03
16Hz 10.72 8.16 5.33
18Hz 12.02 9.14 5.66
Az első oszlopban az esztergát forgató frekiváltó névleges frekvenciája szerepel ( 10Hz megfelel 57 1/ min nek )
A második oszlopban a gyári állapotú motor feszültsége látható
A harmadik oszlopban az óvatosan csőbehúzott majd visszahelyezett forgórész feszültség adatai szerepelnek . A negyedik oszlopban a levegőre kivett és visszahelyezett forgórésszel történt a mérés
Megállapítások : a csőbehúzással kb 77 % ra esett le a B
A teljes kivételnél (átlagosan ) az 53 % ára . A fordulatszám indukált feszültség a nyers motornál lineáris , a csőbe húzottnál is , viszont a levegőre kivett forgórész nagyobb fordulatoknál már csökkenő feszültséget eredményez
Megállapítás 2 . A kommersz léptetők ( ALNiCo mágnessel vannak szerelve ) IGENIS lemágneseződnek ha kihúzzuk a forgórészt
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2018 március 03, 10:24
Írta: zozo Dátum 2018 március 03, 10:24
[#eljen][#taps] Érdekes infók, köszönjük.
Az mire utalhat, hogy használt, de soha szét nem szedett 2db tök egyforma léptető házának a mágneses vonzereje eltérő?
Érthetőbben írva, ha egy (összeszerelt) motor házához fémet közelítünk, érezhető, hogy permanens mágnes lakik benne.
Mondjuk adott egy 40x40x1 mm-es lemezdarab, amit egyik motor háza magához tapaszt, a másiké meg elejti.
Mire következtethetünk ebből?
-hogy egyik motor mágnese gyengébb, vagy
-hogy az egyikben excentrikus a forgórész és jobban átadja a mágnesességet a külső vasnak.
A másik kérdés. ami éppen időszerű és ebből a jelenségből felmerült bennem:
-Két motort úgy lenne célszerű elhelyeznem, hogy 2-3 mm-re egymástól, párhuzamosan egymás mellé kerüljenek. Viszont attól tartok, hogy a házak egymásra gyakorolt kölcsönös mágneses hatása valamilyen károsodáshoz vezethet egy idő után. -Van alapja az ilyen aggodalomnak ?
Az mire utalhat, hogy használt, de soha szét nem szedett 2db tök egyforma léptető házának a mágneses vonzereje eltérő?
Érthetőbben írva, ha egy (összeszerelt) motor házához fémet közelítünk, érezhető, hogy permanens mágnes lakik benne.
Mondjuk adott egy 40x40x1 mm-es lemezdarab, amit egyik motor háza magához tapaszt, a másiké meg elejti.
Mire következtethetünk ebből?
-hogy egyik motor mágnese gyengébb, vagy
-hogy az egyikben excentrikus a forgórész és jobban átadja a mágnesességet a külső vasnak.
A másik kérdés. ami éppen időszerű és ebből a jelenségből felmerült bennem:
-Két motort úgy lenne célszerű elhelyeznem, hogy 2-3 mm-re egymástól, párhuzamosan egymás mellé kerüljenek. Viszont attól tartok, hogy a házak egymásra gyakorolt kölcsönös mágneses hatása valamilyen károsodáshoz vezethet egy idő után. -Van alapja az ilyen aggodalomnak ?
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 03, 10:51
Írta: PSoft Dátum 2018 március 03, 10:51
Nem is oly rég, én is tapasztaltam ezt a "jelenséget".
(a tapasztalás, véletlen szüleménye)
-Két, teljesen egyforma(gyártó, típus) NEMA23-as motor.
-Szinte biztos vagyok benne, hogy egy beszerzés is.
-Az eddigi "munkaidejük" is azonos.
-A külső körülmények,és a villamos paraméterek is ugyanazok az eddigi üzemelés során.
-Nem "leharcolt" egyik motor sem, most is újszerűek.
Mégis jelentős különbséget mutat a két motor a "lágyvas teszt" során.
Hogy újkorán mit mutattak volna a motorok...
Hát azt...nem tudom.:)
(a tapasztalás, véletlen szüleménye)
-Két, teljesen egyforma(gyártó, típus) NEMA23-as motor.
-Szinte biztos vagyok benne, hogy egy beszerzés is.
-Az eddigi "munkaidejük" is azonos.
-A külső körülmények,és a villamos paraméterek is ugyanazok az eddigi üzemelés során.
-Nem "leharcolt" egyik motor sem, most is újszerűek.
Mégis jelentős különbséget mutat a két motor a "lágyvas teszt" során.
Hogy újkorán mit mutattak volna a motorok...
Hát azt...nem tudom.:)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2018 március 03, 12:01
Írta: svejk Dátum 2018 március 03, 12:01
Szerintem ami kifelé jelentős mágnesességet mutat az már eleve vacak, rossz hatásfokú.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 03, 12:58
Írta: PSoft Dátum 2018 március 03, 12:58
No igen, de ugyanazon típusból, két motor...
Az egyik, könnyedén megtartja/magához rántja a képen látható 120x20x0,5 mm-es trafólemez darabkát, a másik meg, nem.
Mutat ugyan vonzalmat iránta, de közel sem annyit, hogy magán tartsa a lemezt.
A motor tengelyeket kézzel forgatva, nem érezhető jelentős különbség, talán amelyik "kifele is mágneses", kicsit nehezebben forgatható a másiknál.
FL57STH56-xxx .pdf 23. oldal (http://cnctar.hobbycnc.hu/PSoft/Vegyes/hybrid-stepper-motors.pdf)
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_y2cbickjb09qmwkd3psw_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/y2cbickjb09qmwkd3psw_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_38i4qtivu8ej4xmyd06ve_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/38i4qtivu8ej4xmyd06ve_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_wdenjy9nwits9fnbekfy9_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/wdenjy9nwits9fnbekfy9_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_hze6ee8k5vd235yp2dh8a_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/hze6ee8k5vd235yp2dh8a_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_2desx4scgd3tbty8z556_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/2desx4scgd3tbty8z556_1068.jpg)
Az egyik, könnyedén megtartja/magához rántja a képen látható 120x20x0,5 mm-es trafólemez darabkát, a másik meg, nem.
Mutat ugyan vonzalmat iránta, de közel sem annyit, hogy magán tartsa a lemezt.
A motor tengelyeket kézzel forgatva, nem érezhető jelentős különbség, talán amelyik "kifele is mágneses", kicsit nehezebben forgatható a másiknál.
FL57STH56-xxx .pdf 23. oldal (http://cnctar.hobbycnc.hu/PSoft/Vegyes/hybrid-stepper-motors.pdf)
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_y2cbickjb09qmwkd3psw_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/y2cbickjb09qmwkd3psw_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_38i4qtivu8ej4xmyd06ve_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/38i4qtivu8ej4xmyd06ve_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_wdenjy9nwits9fnbekfy9_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/wdenjy9nwits9fnbekfy9_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_hze6ee8k5vd235yp2dh8a_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/hze6ee8k5vd235yp2dh8a_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_2desx4scgd3tbty8z556_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/2desx4scgd3tbty8z556_1068.jpg)
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2018 március 03, 13:10
Írta: Szalai György Dátum 2018 március 03, 13:10
Nem úgy van az, hogy bizonyos számú erővonal belefér a vasba, a többi meg kiszorul?
Ha már keveset produkál a mágnes, akkor mind belefér.
Érdekes lehetne különbséget találni köztük az ANTAL GÁBOR 3423 méréssel.
Ha már keveset produkál a mágnes, akkor mind belefér.
Érdekes lehetne különbséget találni köztük az ANTAL GÁBOR 3423 méréssel.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 03, 13:32
Írta: PSoft Dátum 2018 március 03, 13:32
No de akkor, Svejk megállapítása az [5714]-ben?
Épp hogy az ellenkezője lenne az igaz?[#nemtudom]
Épp hogy az ellenkezője lenne az igaz?[#nemtudom]
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2018 március 03, 14:22
Írta: ANTAL GÁBOR Dátum 2018 március 03, 14:22
Svejk megállapítását én is osztom Mindennel spórolnak .
Nem szabadna kívül mágnesesnek lenni a lágyvasnak . Mondok egy példát : csinálok egy mágneses szeparátort a poligon dobra felragasztom a mágneseket Ha nem alkalmazok elég vastag falat a dobnál akkor az erővonalak egy része a dobon belül kilép a levegőbe és aztán záródik . A szeparátornak lecsökken a teljesítőképessége. . Van egy véges elemes modellező program FEMM amivel gyönyörűen modellezni is lehet a dolgot .
A léptecsgyártók nem teszik be a megfelelő vastagságú koszorút mert sok kocsi sokra megy
Én megmértem a motort a gyári B vel Tételezzük fel hogy elég vastag volt a koszorú tehát minden erővonal benn maradt Aztán a forgórész kihúzása után lecsökkent a B és még jobban benn maradt
Nem szabadna kívül mágnesesnek lenni a lágyvasnak . Mondok egy példát : csinálok egy mágneses szeparátort a poligon dobra felragasztom a mágneseket Ha nem alkalmazok elég vastag falat a dobnál akkor az erővonalak egy része a dobon belül kilép a levegőbe és aztán záródik . A szeparátornak lecsökken a teljesítőképessége. . Van egy véges elemes modellező program FEMM amivel gyönyörűen modellezni is lehet a dolgot .
A léptecsgyártók nem teszik be a megfelelő vastagságú koszorút mert sok kocsi sokra megy
Én megmértem a motort a gyári B vel Tételezzük fel hogy elég vastag volt a koszorú tehát minden erővonal benn maradt Aztán a forgórész kihúzása után lecsökkent a B és még jobban benn maradt
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 03, 14:36
Írta: PSoft Dátum 2018 március 03, 14:36
Akkor, az én két motorom közül amelyik kifele gyengébb, az már...befele is gyengébb.:(
(az forgatható kézzel könnyebben)
Most épp foglalt az eszterga, de megcsinálom a magam módján az általad vázolt tesztet a "gyengébb" (kifele is gyengébb) motorral.
Csőbe húzást nem ígérek, az egész nem ér annyit.:)
De az eredeti, és a levegőre széthúzott, majd összerakott motor generátor tesztjét megcsinálom.
legfeljebb lesz egy fasza...macskadobálóm a teszt végére.[#nevetes1]
(az forgatható kézzel könnyebben)
Most épp foglalt az eszterga, de megcsinálom a magam módján az általad vázolt tesztet a "gyengébb" (kifele is gyengébb) motorral.
Csőbe húzást nem ígérek, az egész nem ér annyit.:)
De az eredeti, és a levegőre széthúzott, majd összerakott motor generátor tesztjét megcsinálom.
legfeljebb lesz egy fasza...macskadobálóm a teszt végére.[#nevetes1]
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2018 március 03, 14:38
Írta: Szalai György Dátum 2018 március 03, 14:38
Lehet, hogy nem is mérhető különbség PSoft 10275 motorjai között, mert a vas mindkettőben tele van?
Ami meg kiszorul belőle az úgysem hasznos befelé.
De akkor hova férnek el a koszorúba még az állórésztekercsek erővonalai, ha már a forgórészé is kiszorul belőle?
Ami meg kiszorul belőle az úgysem hasznos befelé.
De akkor hova férnek el a koszorúba még az állórésztekercsek erővonalai, ha már a forgórészé is kiszorul belőle?
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2018 március 03, 15:28
Írta: jani300 Dátum 2018 március 03, 15:28
[#nemtudom] Gyengíteni talán tudja a telítét , ellendolgozva az alap mágnesességnek .
Lényeg a változás .
Tudom hogy marhaság , de a mai világban még ezen sem csodálkoznék .
Lényeg a változás .
Tudom hogy marhaság , de a mai világban még ezen sem csodálkoznék .
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2018 március 03, 15:39
Írta: jani300 Dátum 2018 március 03, 15:39
Erővonal kiszorításra gondoltam , az előző még tőlem is túl pongyolára sikerült :)
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 03, 17:03
Írta: PSoft Dátum 2018 március 03, 17:03
Nos...
Megcsináltam a tesztet.:)
A motor(ok) tengelyét a TUM25-B esztergám tokmányába fogva, és a gépen kínált fordulatszámokat használva.
Mindkét motoromat megforgattam, majd a gyengébbnek ítélt,(kézi forgatásra)és kifele is gyengébb mágneses vonzást mutató motort...szétszedtem.
Csőbe nem húztam a forgórészt, azzal nem tököltem.:)
Szóval, szabad levegőn volt a forgórész a fotózkodás idejére,és még utána is jó pár percig.
Kb. fél órát töltött a forgórész szabadon, a levegőben záródó erővonalakkal.
Összerakás után, újból megforgattam, ugyanazokkal a feltételekkel.
Unipoláris motorok lévén az egész tekercsen mértem, és közben terheltem egy 390 Ohmos ellenállással.(mint ahogy Gábor is)
A táblázat első oszlopában, a teszthez alkalmazott fordulatszámok.
A második oszlopban, a gyengébbnek ítélt motor, amelyik kézzel könnyebben forgatható,és amelyik kifele is kevesebb mágnesességet mutat.
A harmadik oszlopban a kifele több mágnesességet mutató motor, ez forgatható kézzel is keményebben.(ezt, nem szedtem szét):)
A negyedik oszlopban, a szétszedett, majd kb. fél óra után összerakott motor újbóli mérése, az előzőekkel megegyező paraméterekkel.
Érdekes adatok a negyedik oszlopban...
-35,5 1/min. 2,1V 2,5V 2,16V
-50 1/min. 2,9V 3,6V 3,0 V
-71 1/min. 4,2V 5,1V 4,29V
-100 1/min. 5,9V 7,2V 6,03V
-280 1/min. 16,7V 20,1V 16,58V
Szétszedéskor kiderült...
Ezek a típusú motorok sem rendelkeznek illesztő vállal.
A pajzsok, és a forgórész központozását, a tekercsfej műanyag elemei biztosítják.:(
Összerakáskor, pár koppintással:) érzésre, központozható a forgórész, beállítható az "akadásmentes" futás.
Összerakás után, szerintem...megmaradt a két motor közötti különbség.
Már ami a kifele mutató mágnességet,és a kézzel forgathatósághoz szükséges erőt illeti.
(lehet, mégsem lesz a szétszedett motorból sem...macskadobáló):)
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_0fheuuz9n6dwuijg5n0mh_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/0fheuuz9n6dwuijg5n0mh_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_g6skuu95bwgmwdm8mtku_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/g6skuu95bwgmwdm8mtku_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_8ayan38vebj25ajcze9am_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/8ayan38vebj25ajcze9am_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_6zkyiw3znfxhabvz0pg6s_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/6zkyiw3znfxhabvz0pg6s_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_wcahwgtqu4eeevmsg9xg_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/wcahwgtqu4eeevmsg9xg_1068.jpg)
Megcsináltam a tesztet.:)
A motor(ok) tengelyét a TUM25-B esztergám tokmányába fogva, és a gépen kínált fordulatszámokat használva.
Mindkét motoromat megforgattam, majd a gyengébbnek ítélt,(kézi forgatásra)és kifele is gyengébb mágneses vonzást mutató motort...szétszedtem.
Csőbe nem húztam a forgórészt, azzal nem tököltem.:)
Szóval, szabad levegőn volt a forgórész a fotózkodás idejére,és még utána is jó pár percig.
Kb. fél órát töltött a forgórész szabadon, a levegőben záródó erővonalakkal.
Összerakás után, újból megforgattam, ugyanazokkal a feltételekkel.
Unipoláris motorok lévén az egész tekercsen mértem, és közben terheltem egy 390 Ohmos ellenállással.(mint ahogy Gábor is)
A táblázat első oszlopában, a teszthez alkalmazott fordulatszámok.
A második oszlopban, a gyengébbnek ítélt motor, amelyik kézzel könnyebben forgatható,és amelyik kifele is kevesebb mágnesességet mutat.
A harmadik oszlopban a kifele több mágnesességet mutató motor, ez forgatható kézzel is keményebben.(ezt, nem szedtem szét):)
A negyedik oszlopban, a szétszedett, majd kb. fél óra után összerakott motor újbóli mérése, az előzőekkel megegyező paraméterekkel.
Érdekes adatok a negyedik oszlopban...
-35,5 1/min. 2,1V 2,5V 2,16V
-50 1/min. 2,9V 3,6V 3,0 V
-71 1/min. 4,2V 5,1V 4,29V
-100 1/min. 5,9V 7,2V 6,03V
-280 1/min. 16,7V 20,1V 16,58V
Szétszedéskor kiderült...
Ezek a típusú motorok sem rendelkeznek illesztő vállal.
A pajzsok, és a forgórész központozását, a tekercsfej műanyag elemei biztosítják.:(
Összerakáskor, pár koppintással:) érzésre, központozható a forgórész, beállítható az "akadásmentes" futás.
Összerakás után, szerintem...megmaradt a két motor közötti különbség.
Már ami a kifele mutató mágnességet,és a kézzel forgathatósághoz szükséges erőt illeti.
(lehet, mégsem lesz a szétszedett motorból sem...macskadobáló):)
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_0fheuuz9n6dwuijg5n0mh_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/0fheuuz9n6dwuijg5n0mh_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_g6skuu95bwgmwdm8mtku_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/g6skuu95bwgmwdm8mtku_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_8ayan38vebj25ajcze9am_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/8ayan38vebj25ajcze9am_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_6zkyiw3znfxhabvz0pg6s_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/6zkyiw3znfxhabvz0pg6s_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_wcahwgtqu4eeevmsg9xg_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/wcahwgtqu4eeevmsg9xg_1068.jpg)
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2018 március 03, 17:28
Írta: jani300 Dátum 2018 március 03, 17:28
[#eljen] Érdekes .
Hibrid léptető az biztos ,olvastam olyat is hogy ezek nem kényesek a forgórész kihúzásra .
Multiméterrel mérted ? Remélem nem merült közben az elem .
Más magyarázat most nem ugrik be a javulásra [#fejvakaras]
De jó hogy megcsináltad a tesztet !
Hibrid léptető az biztos ,olvastam olyat is hogy ezek nem kényesek a forgórész kihúzásra .
Multiméterrel mérted ? Remélem nem merült közben az elem .
Más magyarázat most nem ugrik be a javulásra [#fejvakaras]
De jó hogy megcsináltad a tesztet !
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 03, 17:50
Írta: J-Steel Dátum 2018 március 03, 17:50
PSoft, Antal Gábor!
Mivel lett mérve a feszültség? Ganzuniv 3 tud true RMS-t.
Mivel lett mérve a feszültség? Ganzuniv 3 tud true RMS-t.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 03, 18:04
Írta: PSoft Dátum 2018 március 03, 18:04
Én, egy mezei, digitális multiméterrel mértem.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 03, 18:45
Írta: PSoft Dátum 2018 március 03, 18:45
A lentebbi pár kép alapján, erről...mi a véleményed?
Három csatornás mozgásvezérlő...
A végein, L6297 motormeghajtókkal. (http://cnctar.hobbycnc.hu/PSoft/Vegyes/L6207%20motor%20drive.pdf)
Ilyen vezérlők hajtották pl. a lentebbi boncolt/tesztelt NEMA23-asokat.
De vegyesen, ugyanez a kártya hajtott DC motort, enkóderes DC szervót,és BLDC-t is.
Csak, a "százlábú" protokollját kéne megfejteni...:)
Küldjek egyet "tesztelésre"?
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_uwbhhwduijfqxhpvbne6_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/uwbhhwduijfqxhpvbne6_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_2cy0uch2k56c9x4hzt3wx_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/2cy0uch2k56c9x4hzt3wx_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_qyhn0gji0hpfs26und9qn_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/qyhn0gji0hpfs26und9qn_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_34w9c8ce2tnmjvy5dwy2z_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/34w9c8ce2tnmjvy5dwy2z_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_k2hdnanqt2xywc8peb0p_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/k2hdnanqt2xywc8peb0p_1068.jpg)
Három csatornás mozgásvezérlő...
A végein, L6297 motormeghajtókkal. (http://cnctar.hobbycnc.hu/PSoft/Vegyes/L6207%20motor%20drive.pdf)
Ilyen vezérlők hajtották pl. a lentebbi boncolt/tesztelt NEMA23-asokat.
De vegyesen, ugyanez a kártya hajtott DC motort, enkóderes DC szervót,és BLDC-t is.
Csak, a "százlábú" protokollját kéne megfejteni...:)
Küldjek egyet "tesztelésre"?
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_uwbhhwduijfqxhpvbne6_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/uwbhhwduijfqxhpvbne6_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_2cy0uch2k56c9x4hzt3wx_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/2cy0uch2k56c9x4hzt3wx_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_qyhn0gji0hpfs26und9qn_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/qyhn0gji0hpfs26und9qn_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_34w9c8ce2tnmjvy5dwy2z_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/34w9c8ce2tnmjvy5dwy2z_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_k2hdnanqt2xywc8peb0p_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/k2hdnanqt2xywc8peb0p_1068.jpg)
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 03, 18:51
Írta: PSoft Dátum 2018 március 03, 18:51
Ezt, elbaccctam, kétszer ment el.[#falbav]
Aki itt van, nyomjon már egy törlést az [5728]-ra.
Aki itt van, nyomjon már egy törlést az [5728]-ra.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 03, 18:57
Írta: PSoft Dátum 2018 március 03, 18:57
Persze, az L6207-et is elírtam 6297 lett belőle,[#falbav] de a link a 6207-re mutat.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2018 március 03, 19:26
Írta: ANTAL GÁBOR Dátum 2018 március 03, 19:26
Ha mégis macskadobálós lenne akkor kérném a forgórészt !! Én szétszedném és bevonnám Sasit hogy nézze meg az összetételét (de más csatorna is lehet ) Nem tudom mással magyarázni csak azzal hogy nem AlNiCo . A fotót nézve nem látom hogy volt e nikkelezve vagy cinkezve a palástja ?
Kínai vagy japán ?
Kínai vagy japán ?
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2018 március 03, 19:28
Írta: ANTAL GÁBOR Dátum 2018 március 03, 19:28
Minthogy szinuszosnak lehet feltételezni a feszültséget én is a kettős integrálós multiméteremet vettem elő . A különbség azzal is kiderül
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2018 március 03, 19:33
Írta: ANTAL GÁBOR Dátum 2018 március 03, 19:33
De van egy jobb ötletem is : kölcsönkérek egy indukciómérőt és a szétszedett forgórész mágnesneak megmérem a felületi indukcióját ( van egy saját indukciómérőm is de elég kaotikus , egy kis ráfordítást megérne , lehet megcsinálom )
Az én szétszedett forgórészem is meg van talán azzal kezdem ....
Az én szétszedett forgórészem is meg van talán azzal kezdem ....
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2018 március 03, 19:59
Írta: ANTAL GÁBOR Dátum 2018 március 03, 19:59
Beszéltem Bélával telefonon . Elküldi nekem a motort és tovább vizsgálódok ( az adatlap alapján feltételezhetően neodymiummal van szerelve mert T max = 80 C fok . ) A pdf ben nem utalnak a mágnes minőségére
Összerakom a térerőmérőmet és egy kölcsön műszerrel lekalibrálom . Előszedtem az én motoromat Az egy Sanyo denki 2.1 Nm es 4 szegmeneses forgórészű klasszikus AlNiCo ( nincs nikkelezve ,nyers a felülete a mágnesnek )
Összerakom a térerőmérőmet és egy kölcsön műszerrel lekalibrálom . Előszedtem az én motoromat Az egy Sanyo denki 2.1 Nm es 4 szegmeneses forgórészű klasszikus AlNiCo ( nincs nikkelezve ,nyers a felülete a mágnesnek )
Cím: Re:Léptetőmotor
Írta: rokonok Dátum 2018 március 03, 20:05
Írta: rokonok Dátum 2018 március 03, 20:05
Itt a katalógus a motorokról. Sajna mágnesről nem írnak.
kati... (http://www.motioncontrolproducts.com/pdfs/hybrid-stepper-motors.pdf)
kati... (http://www.motioncontrolproducts.com/pdfs/hybrid-stepper-motors.pdf)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2018 március 03, 20:07
Írta: svejk Dátum 2018 március 03, 20:07
"A harmadik oszlopban a kifele több mágnesességet mutató motor, ez forgatható kézzel is keményebben.(ezt, nem szedtem szét)"
Kár, pedig akár tanulságos is lehetett volna.
Kár, pedig akár tanulságos is lehetett volna.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 03, 20:15
Írta: PSoft Dátum 2018 március 03, 20:15
No de, ott a katalógus, az [5715]-ben is!
[#t168p5715#]
[#t168p5715#]
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 03, 20:26
Írta: PSoft Dátum 2018 március 03, 20:26
Gáborral beszélgetve született egy teória is, a két egyforma motor, nem egyforma "külső mágnesességével" kapcsolatban.
Röviden...
A motorpajzsok, nem illesztővállas kialakítása miatt elképzelhető, hogy az "erősebb" külső mágnesességet mutató motor forgórésze, nincs tökéletesen "központban".
Talán, ezért a kézzel nehezebb forgatás is.[#nemtudom]
Röviden...
A motorpajzsok, nem illesztővállas kialakítása miatt elképzelhető, hogy az "erősebb" külső mágnesességet mutató motor forgórésze, nincs tökéletesen "központban".
Talán, ezért a kézzel nehezebb forgatás is.[#nemtudom]
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2018 március 03, 20:38
Írta: zozo Dátum 2018 március 03, 20:38
Wow, akkor nekem is vannak néha "okos" gondolataim [#nevetes1]
[#t168p5712#]
Az én motorom annyira klón, hogy adatlapot se találni róla. :)
[#t168p5712#]
Az én motorom annyira klón, hogy adatlapot se találni róla. :)
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 03, 20:45
Írta: PSoft Dátum 2018 március 03, 20:45
Mindenképpen![#worship]
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 04, 02:41
Írta: J-Steel Dátum 2018 március 04, 02:41
Olvasgattam külföldi fórumokon.
Azt írják, hogy a mágnesek idővel gyengülnek, ha a pólusaik nincsenek összekapcsolva valamilyen ferromágneses anyaggal.
Erre azt a tapasztalati példát hozták, hogy a fizika szertár patkómágnesét is úgy tárolják, hogy a két pólusvéget vassal "rövidzárják", különben az évek alatt lemágneseződik.
Van egy Orientalmotors nevű cég, aki hibrid léptetőket forgalmaz, és megírta a fontos infókat.
- A motort ne terheljük a névleges áramnál 2x jobban, mert telítődés miatt nem alakul több forg. nyomaték
- A motor névleges áramának 10x terhelése esetén a mágnes lemagnetizálódik
- A forgórészt komplett összeszerelés után mágnesezik fel a gyárban
- A motor szétszedésével a nyomaték 50%-ra csökkenhet
forrás:
http://www.orientalmotor.com/stepper-motors/technology/stepper-motor-basics.html (http://www.orientalmotor.com/stepper-motors/technology/stepper-motor-basics.html)
Egy másik cég azt írta, hogy a csapágycsere miatti szétszedés után vállal újramágnesezést bizonyos költségtérítés fejében.
Ezen a tudományos oldalon pedig azt írják, hogy a permanens mágnes nem is olyan permanens mint gondolnánk.
- néhány ütést kibír, de gyakori ismétlődés esetén elveszíti mágnesességét
- ha úgy tároljuk a mágneseket, hogy egymást taszítják, akkor idővel mindkét mágnes veszít erejéből. Érdemes úgy tárolni a patkómágneseket, hogy északi pólust a másik déli pólusával kapcsolunk össze.
https://sciencing.com/causes-magnet-lose-its-magnetism-8229455.html (https://sciencing.com/causes-magnet-lose-its-magnetism-8229455.html)
Azt írják, hogy a mágnesek idővel gyengülnek, ha a pólusaik nincsenek összekapcsolva valamilyen ferromágneses anyaggal.
Erre azt a tapasztalati példát hozták, hogy a fizika szertár patkómágnesét is úgy tárolják, hogy a két pólusvéget vassal "rövidzárják", különben az évek alatt lemágneseződik.
Van egy Orientalmotors nevű cég, aki hibrid léptetőket forgalmaz, és megírta a fontos infókat.
- A motort ne terheljük a névleges áramnál 2x jobban, mert telítődés miatt nem alakul több forg. nyomaték
- A motor névleges áramának 10x terhelése esetén a mágnes lemagnetizálódik
- A forgórészt komplett összeszerelés után mágnesezik fel a gyárban
- A motor szétszedésével a nyomaték 50%-ra csökkenhet
forrás:
http://www.orientalmotor.com/stepper-motors/technology/stepper-motor-basics.html (http://www.orientalmotor.com/stepper-motors/technology/stepper-motor-basics.html)
Egy másik cég azt írta, hogy a csapágycsere miatti szétszedés után vállal újramágnesezést bizonyos költségtérítés fejében.
Ezen a tudományos oldalon pedig azt írják, hogy a permanens mágnes nem is olyan permanens mint gondolnánk.
- néhány ütést kibír, de gyakori ismétlődés esetén elveszíti mágnesességét
- ha úgy tároljuk a mágneseket, hogy egymást taszítják, akkor idővel mindkét mágnes veszít erejéből. Érdemes úgy tárolni a patkómágneseket, hogy északi pólust a másik déli pólusával kapcsolunk össze.
https://sciencing.com/causes-magnet-lose-its-magnetism-8229455.html (https://sciencing.com/causes-magnet-lose-its-magnetism-8229455.html)
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2018 március 04, 08:09
Írta: ANTAL GÁBOR Dátum 2018 március 04, 08:09
"- A motor szétszedésével a nyomaték 50%-ra csökkenhet"
ezt kommunikálom 2 napja ! De a Psoft féle mérés mást is előrevetít . Régen ( atombiztos infó) AlNiCo mágnesekkel szerelték a motorokat és zárt vaskörben mágnesezték föl azt
Az AlNiCo gyártása egy régi technológia ,azt hiszem a 30 as években a Japánok találták fel , olcsó és zárt vaskörben az indukciója kissé nagyobb mint a neodímiumé
A felmágnesezéshez komoly cél készülék kell . Aztán a neodímium mágnesek ára csökkent ( manapság megint emelkedik ) és a cégek kihagyták a AlNiCo mágneseket és egyszerűbb konstrukciót választottak . Saccra egy 3 Nm es motorban a neodímium mágnes ára kb 300 -500 Ft lehet Ennyit megér a gyárnak, belefér a költségekbe
És akkor jön a dilemma :kivehető e a forgórész ? Ha tudjuk hogy a gyár neodímiummal szerelte akkor IGEN minden ellenkező esetben NEM ! Vettem Németországból direkt mérési célra fejlesztett analóg Hall cellákat ( Ic = 5 mA és B = 1 Tesla estén Uki = 2 V ) megcsinálom a hőkompenzált áramgenerátort és mérek ( addig ideér a Psoft féle forgórész )
( folyt köv mert keresek egy demagnetizációs görbét
( mindkét mágnesét ) hogy jobban érthető legyen amit írok
ezt kommunikálom 2 napja ! De a Psoft féle mérés mást is előrevetít . Régen ( atombiztos infó) AlNiCo mágnesekkel szerelték a motorokat és zárt vaskörben mágnesezték föl azt
Az AlNiCo gyártása egy régi technológia ,azt hiszem a 30 as években a Japánok találták fel , olcsó és zárt vaskörben az indukciója kissé nagyobb mint a neodímiumé
A felmágnesezéshez komoly cél készülék kell . Aztán a neodímium mágnesek ára csökkent ( manapság megint emelkedik ) és a cégek kihagyták a AlNiCo mágneseket és egyszerűbb konstrukciót választottak . Saccra egy 3 Nm es motorban a neodímium mágnes ára kb 300 -500 Ft lehet Ennyit megér a gyárnak, belefér a költségekbe
És akkor jön a dilemma :kivehető e a forgórész ? Ha tudjuk hogy a gyár neodímiummal szerelte akkor IGEN minden ellenkező esetben NEM ! Vettem Németországból direkt mérési célra fejlesztett analóg Hall cellákat ( Ic = 5 mA és B = 1 Tesla estén Uki = 2 V ) megcsinálom a hőkompenzált áramgenerátort és mérek ( addig ideér a Psoft féle forgórész )
( folyt köv mert keresek egy demagnetizációs görbét
( mindkét mágnesét ) hogy jobban érthető legyen amit írok
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2018 március 04, 09:07
Írta: ANTAL GÁBOR Dátum 2018 március 04, 09:07
No itt a görbe .. De erre rá kell rajzolnunk a levegő B H görbéjét . Akkor a mágnes görbéje és a levegő görbéje munkapontot alkot és leolvasható a kialakuló B érték
egy kis fizika
B = mű null *műrel *H (mű rel = 1 levegőre )
műnull = 1.256*10ad minusz 6 Vs /Am SI egységben
Hozzunk létre 2 Kgauss indukciót ( 0.2 Tesla )
ehhez 0.2/ 1.256*10ad -6 gerjesztés tartozik ami 159000A/m
ez a fránya diagram Oerster-rel operál nem baj 1 Oe = 79.6 A/ m vagyis a 159000A/m az megfelel 2000 Oe nek
Most már rá lehet rajzolni a levegő görbéjét ( 2 kGauss illetve 2000 Oe ( az origóból induló egyenes) végpontja 1 gausses/ oersted ordinátaponton van mert 2000 gauss / 2000 Oe az pont eggyel egyenlő
Siralmas az AlNiCo-9 es munkapontja mert kb 1.5 kGasuus vagyis 0.15 Tesla
Az érdeklődők megkereshetik a neodimim lemágnesezési görbéjét is és arra is rávetíthetik a levegőjét 1-1.2 tesla lesz a munkapont ( 20 C fokon )
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_i5ffx8shv4pgtne6hhk8_906.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/i5ffx8shv4pgtne6hhk8_906.jpg)
egy kis fizika
B = mű null *műrel *H (mű rel = 1 levegőre )
műnull = 1.256*10ad minusz 6 Vs /Am SI egységben
Hozzunk létre 2 Kgauss indukciót ( 0.2 Tesla )
ehhez 0.2/ 1.256*10ad -6 gerjesztés tartozik ami 159000A/m
ez a fránya diagram Oerster-rel operál nem baj 1 Oe = 79.6 A/ m vagyis a 159000A/m az megfelel 2000 Oe nek
Most már rá lehet rajzolni a levegő görbéjét ( 2 kGauss illetve 2000 Oe ( az origóból induló egyenes) végpontja 1 gausses/ oersted ordinátaponton van mert 2000 gauss / 2000 Oe az pont eggyel egyenlő
Siralmas az AlNiCo-9 es munkapontja mert kb 1.5 kGasuus vagyis 0.15 Tesla
Az érdeklődők megkereshetik a neodimim lemágnesezési görbéjét is és arra is rávetíthetik a levegőjét 1-1.2 tesla lesz a munkapont ( 20 C fokon )
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_i5ffx8shv4pgtne6hhk8_906.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/i5ffx8shv4pgtne6hhk8_906.jpg)
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2018 március 04, 09:08
Írta: ANTAL GÁBOR Dátum 2018 március 04, 09:08
Oersted -del operál
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2018 március 04, 09:13
Írta: Szalai György Dátum 2018 március 04, 09:13
Szerintem.
Ma már az olcsó tömeg gyárthatósággal nem fér meg az AlNiCo egyedileg beépítve felmágnesezős technológiája.
Olcsóba beleteszik a leghitványabb N33M minőségű NdFeB karikát, ami száz fok fölött már nem is mágnes.
Jó az pl. a nyomtatóba. Ha már olyan meleg, akkor úgyis meglágyul körülötte a többi műanyag kivetnivaló és oda a filléren vett boldogság.
Igényesebbe meg mehet az N52EH amibe kerül egy csipetnyi Tb/Dy is, így működik akár száznyolcvan fokon, vagy kicsit fölötte. Az már más motor, mert még a csapágyzsír sem lehet egyszerű benne. Valószínűleg nem is rakják háztartási készülékekbe.
Csúcskategóriásba meg SmCo mágnes kerül, ami akkor is mágnes marad, ha leolvad róla az alumínium motorpajzs.
Ezek mind szétszedhetőek, nem igényelnek zárt mágnes kört.
Az AlNiCo a régi idők öröksége, mikor az volt az alternatíva, a törékeny ferrit mellett.
Ma már az olcsó tömeg gyárthatósággal nem fér meg az AlNiCo egyedileg beépítve felmágnesezős technológiája.
Olcsóba beleteszik a leghitványabb N33M minőségű NdFeB karikát, ami száz fok fölött már nem is mágnes.
Jó az pl. a nyomtatóba. Ha már olyan meleg, akkor úgyis meglágyul körülötte a többi műanyag kivetnivaló és oda a filléren vett boldogság.
Igényesebbe meg mehet az N52EH amibe kerül egy csipetnyi Tb/Dy is, így működik akár száznyolcvan fokon, vagy kicsit fölötte. Az már más motor, mert még a csapágyzsír sem lehet egyszerű benne. Valószínűleg nem is rakják háztartási készülékekbe.
Csúcskategóriásba meg SmCo mágnes kerül, ami akkor is mágnes marad, ha leolvad róla az alumínium motorpajzs.
Ezek mind szétszedhetőek, nem igényelnek zárt mágnes kört.
Az AlNiCo a régi idők öröksége, mikor az volt az alternatíva, a törékeny ferrit mellett.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2018 március 04, 09:51
Írta: ANTAL GÁBOR Dátum 2018 március 04, 09:51
Hasonló a meglátásod . Amit én szétszedtem az egy neves ( japán) gyár terméke volt ( Sanyó Denki . ) Szét kellene szedni egy mai kínait is . ( Psoft motorja azt hiszem angol )
INNENTŐL GYŰJTÖM A LEÉGETT MOTOROKAT !!!!
( főleg a Klaviós és ebay-os motorok érdekelnek , majd visszamérem a mágneseket és csinálok egy katalógust [#vigyor4])
INNENTŐL GYŰJTÖM A LEÉGETT MOTOROKAT !!!!
( főleg a Klaviós és ebay-os motorok érdekelnek , majd visszamérem a mágneseket és csinálok egy katalógust [#vigyor4])
Cím: Re:Léptetőmotor
Írta: sanyi84 Dátum 2018 március 04, 10:03
Írta: sanyi84 Dátum 2018 március 04, 10:03
Ha kiveszed a központból már akkor is lemágneseződik??? Mert hogy nem feltétlen kell kivenni cseréhez a forgórészt.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 04, 12:01
Írta: PSoft Dátum 2018 március 04, 12:01
[#t168p5736#]
No akkor...
Csak most, csak Neked![#nevetes1]
Ugyanazt, elkövettem a kifele több mágnességet mutató motorral is.
Tegnap ugye, mértem a "gyárilag" összeszerelt motor generátoros adatait.
Ma, szétszedtem Őt is. Kb. fél óra(fotók, stb.)szabad levegőn tartott forgórész után összeraktam, és a tegnapi metodikát alkalmazva, megismételtem a mérést.
Az első oszlopban, a teszthez alkalmazott fordulatszámok.
A második oszlopban a kifele több mágnesességet mutató motor, ez volt forgatható kézzel is keményebben.(ezt, nem szedtem szét tegnap, ezek a tegnapi mérés számadatai):)
A harmadik oszlopban, a szétszedett, majd kb. fél óra után összerakott motor újbóli mérése, az előzőekkel megegyező paraméterekkel.
A mérés során, az alábbi adatokat kaptam...
-35,5 1/min. 2,5V 2,68V
-50 1/min. 3,6V 3,73V
-71 1/min. 5,1V 5,28V
-100 1/min. 7,2V 7,46V
-280 1/min. 20,1V 21,1V
Most, kicsit jobban megnéztem a motor forgórészét.
Talán most jobban látszik, hogy nikkelezett a mágnesgyűrű palástja a forgórész közepén.
Az összeszerelés simán ment,:) pár koppintás/kézzel forgatás mint tegnap,és a forgórész vélhetőleg "beállt" a helyére.
Összerakás után, a külső, "lágyvas vonzás" tesztet megismételve, érzésre nem történt változás.
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_6p4jtgw4epj04cviecjq_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/6p4jtgw4epj04cviecjq_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_5bjxq2ek4iagczbb33ct_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/5bjxq2ek4iagczbb33ct_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_aq0cmiyua8m9dvv3emt8_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/aq0cmiyua8m9dvv3emt8_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_u52j4beg99huxxbmx46_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/u52j4beg99huxxbmx46_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_yq35n2zezgx2qdyhbe0_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/yq35n2zezgx2qdyhbe0_1068.jpg)
No akkor...
Csak most, csak Neked![#nevetes1]
Ugyanazt, elkövettem a kifele több mágnességet mutató motorral is.
Tegnap ugye, mértem a "gyárilag" összeszerelt motor generátoros adatait.
Ma, szétszedtem Őt is. Kb. fél óra(fotók, stb.)szabad levegőn tartott forgórész után összeraktam, és a tegnapi metodikát alkalmazva, megismételtem a mérést.
Az első oszlopban, a teszthez alkalmazott fordulatszámok.
A második oszlopban a kifele több mágnesességet mutató motor, ez volt forgatható kézzel is keményebben.(ezt, nem szedtem szét tegnap, ezek a tegnapi mérés számadatai):)
A harmadik oszlopban, a szétszedett, majd kb. fél óra után összerakott motor újbóli mérése, az előzőekkel megegyező paraméterekkel.
A mérés során, az alábbi adatokat kaptam...
-35,5 1/min. 2,5V 2,68V
-50 1/min. 3,6V 3,73V
-71 1/min. 5,1V 5,28V
-100 1/min. 7,2V 7,46V
-280 1/min. 20,1V 21,1V
Most, kicsit jobban megnéztem a motor forgórészét.
Talán most jobban látszik, hogy nikkelezett a mágnesgyűrű palástja a forgórész közepén.
Az összeszerelés simán ment,:) pár koppintás/kézzel forgatás mint tegnap,és a forgórész vélhetőleg "beállt" a helyére.
Összerakás után, a külső, "lágyvas vonzás" tesztet megismételve, érzésre nem történt változás.
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_6p4jtgw4epj04cviecjq_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/6p4jtgw4epj04cviecjq_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_5bjxq2ek4iagczbb33ct_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/5bjxq2ek4iagczbb33ct_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_aq0cmiyua8m9dvv3emt8_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/aq0cmiyua8m9dvv3emt8_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_u52j4beg99huxxbmx46_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/u52j4beg99huxxbmx46_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_yq35n2zezgx2qdyhbe0_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/yq35n2zezgx2qdyhbe0_1068.jpg)
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2018 március 04, 12:17
Írta: Szalai György Dátum 2018 március 04, 12:17
Megvan a tanulság: Szétszedve kell tárolni, mert jót tesz neki. [#vigyor2]
(Kövér tréfa, sovány fizetség a munkádért.)
(Kövér tréfa, sovány fizetség a munkádért.)
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 04, 12:34
Írta: PSoft Dátum 2018 március 04, 12:34
Én nem tudom...
De valaki legalább "megpróbálhatná" leírni a miért-jét.
Már látom a jövő léptecseit a boltok polcain.[#nevetes1]
Bemegyek,és kérek...
-egy állórészt...
-két pajzsot...
-két csapágyat...
-egy forgórészt...
-meg...pár apró csavart.
De valaki legalább "megpróbálhatná" leírni a miért-jét.
Már látom a jövő léptecseit a boltok polcain.[#nevetes1]
Bemegyek,és kérek...
-egy állórészt...
-két pajzsot...
-két csapágyat...
-egy forgórészt...
-meg...pár apró csavart.
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2018 március 04, 12:42
Írta: jani300 Dátum 2018 március 04, 12:42
Na ,én már láttam hogy lehet szépen csomagolt forgórészt rendelni ...
Van egy szép nagy bika 6-8 Nm es , de elgörbítették a kihajtó tengelyét , egyszer , talán ,nekiállok egyengetni .
Szét kéne gyorsan kapnom az akadósat ...
Van egy szép nagy bika 6-8 Nm es , de elgörbítették a kihajtó tengelyét , egyszer , talán ,nekiállok egyengetni .
Szét kéne gyorsan kapnom az akadósat ...
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2018 március 04, 12:45
Írta: jani300 Dátum 2018 március 04, 12:45
Fűtöttél, nőtt a terhelőellenállás értéke .
Ez kapásból megvolt , de nem akartam írni ,hátha valaki tényleg okosat ír :)
Ez kapásból megvolt , de nem akartam írni ,hátha valaki tényleg okosat ír :)
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 04, 12:46
Írta: PSoft Dátum 2018 március 04, 12:46
Ne kapkodj, ráér az!:)
(holnapra, úgyis lecseng ez a léptecs sztori)[#wave]
(holnapra, úgyis lecseng ez a léptecs sztori)[#wave]
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 04, 13:01
Írta: PSoft Dátum 2018 március 04, 13:01
Egy másik, csak "vizuális" vizsgálat...
Ugyanennek a gyártónak, (http://www.motioncontrolproducts.com/)egy másik, kisebb,(NEMA17-es)400 lépéses motorja.
Ezt a motort nem méricskéltem, csak szétszedtem,(mert kíváncsi voltam a forgórészre)majd, összeraktam.
Ez a motor is mutatott kifele kevéske vonzalmat a lágyvas lemez iránt.(szétszedés előtt is,és utána is)
Ennél a motornál, négy részre osztott a forgórész.
A mágnesek itt, műgyantával kiöntöttek.
Egykét helyen látni lehet, a gyantába szorult légbuborékot is.:)
Pár kép erről a motorról/forgórészről...
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_yexmtwu3sghe9tg9n9uz_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/yexmtwu3sghe9tg9n9uz_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_udfemqpvjzt758d5jkci2_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/udfemqpvjzt758d5jkci2_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_zma9qmpj38cjhu6w6kpc4_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/zma9qmpj38cjhu6w6kpc4_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_scvsti0zupqkd2f87m0e_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/scvsti0zupqkd2f87m0e_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_bpadbt9h50dvescy_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/bpadbt9h50dvescy_1068.jpg)
Ugyanennek a gyártónak, (http://www.motioncontrolproducts.com/)egy másik, kisebb,(NEMA17-es)400 lépéses motorja.
Ezt a motort nem méricskéltem, csak szétszedtem,(mert kíváncsi voltam a forgórészre)majd, összeraktam.
Ez a motor is mutatott kifele kevéske vonzalmat a lágyvas lemez iránt.(szétszedés előtt is,és utána is)
Ennél a motornál, négy részre osztott a forgórész.
A mágnesek itt, műgyantával kiöntöttek.
Egykét helyen látni lehet, a gyantába szorult légbuborékot is.:)
Pár kép erről a motorról/forgórészről...
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_yexmtwu3sghe9tg9n9uz_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/yexmtwu3sghe9tg9n9uz_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_udfemqpvjzt758d5jkci2_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/udfemqpvjzt758d5jkci2_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_zma9qmpj38cjhu6w6kpc4_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/zma9qmpj38cjhu6w6kpc4_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_scvsti0zupqkd2f87m0e_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/scvsti0zupqkd2f87m0e_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_bpadbt9h50dvescy_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/bpadbt9h50dvescy_1068.jpg)
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2018 március 04, 13:03
Írta: Szalai György Dátum 2018 március 04, 13:03
Elég érdekesen alakult a százalékos eltérés.
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_fu3345shpec9k96iwmkuc_415.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/fu3345shpec9k96iwmkuc_415.jpg)
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_fu3345shpec9k96iwmkuc_415.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/fu3345shpec9k96iwmkuc_415.jpg)
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2018 március 04, 14:02
Írta: zozo Dátum 2018 március 04, 14:02
Huh, mekkora nagy mágnes-mágus vagy! [#nevetes1]
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2018 március 04, 14:49
Írta: ANTAL GÁBOR Dátum 2018 március 04, 14:49
Arra a következtetésre jutok hogy Bélának is kell csinálnom egy hallos térerősség mérőt . ( egy klasszikus multiméterrel és egy 9 V os rádiós ( Sokol ) elemmel ( 2 db lítium cellával ) működik . Az ilyen szétszedés után térerősséget KELLENE MÉRNI !!
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2018 március 04, 15:39
Írta: Szalai György Dátum 2018 március 04, 15:39
De képes az a készülék a NdFeB-ra jellemző max. 1,5T értékig detektálni?
Ahogy a Hall ic-ket nézem, a feléig is alig, de inkább csak a harmadáig.
Ahogy a Hall ic-ket nézem, a feléig is alig, de inkább csak a harmadáig.
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 04, 15:42
Írta: J-Steel Dátum 2018 március 04, 15:42
Véleményem szerint félcsőbe is be lehet húzni a forgórészt, ha sokáig dolga van vele az embernek.
Így ki lehet takarítani valami ragadós anyaggal.
Így ki lehet takarítani valami ragadós anyaggal.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2018 március 04, 16:00
Írta: svejk Dátum 2018 március 04, 16:00
Köszönöm!
Megnyugtató, hogy akkor a modernebb darabok nem AlNiCo mágnessel készülnek.
A régi nagy böszme hybrid stepperek egy pillanat alatt kukaéretté váltak ilyen esetben.
A mérést nem kell kommentálni az a pár % eltérés akármiből is összejöhet.
Megnyugtató, hogy akkor a modernebb darabok nem AlNiCo mágnessel készülnek.
A régi nagy böszme hybrid stepperek egy pillanat alatt kukaéretté váltak ilyen esetben.
A mérést nem kell kommentálni az a pár % eltérés akármiből is összejöhet.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 04, 16:48
Írta: PSoft Dátum 2018 március 04, 16:48
[#t168p5742#]
Itt írja Gábor, hogy...
"Vettem Németországból direkt mérési célra fejlesztett analóg Hall cellákat ( Ic = 5 mA és B = 1 Tesla estén Uki = 2 V )"
Itt írja Gábor, hogy...
"Vettem Németországból direkt mérési célra fejlesztett analóg Hall cellákat ( Ic = 5 mA és B = 1 Tesla estén Uki = 2 V )"
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 04, 16:51
Írta: PSoft Dátum 2018 március 04, 16:51
Ha már "csőbe kell húzni"...
Megnyugtatóbb a zárt hüvely.
Talán, egyszerűbb is kivitelezni.
Megnyugtatóbb a zárt hüvely.
Talán, egyszerűbb is kivitelezni.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2018 március 04, 17:19
Írta: Szalai György Dátum 2018 március 04, 17:19
Nem figyeltem eléggé, mert máshova is kellett. Köszi. (http://cnctar.hobbycnc.hu/Szalai_Gyorgy/IMG_1173.JPG)
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 04, 17:35
Írta: PSoft Dátum 2018 március 04, 17:35
Aafrancbaaa![#finom]
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2018 március 04, 17:41
Írta: ANTAL GÁBOR Dátum 2018 március 04, 17:41
Ezek nem kommersz ( Lomexes ) hallok ezek klasszikus ( méréstechnikára kifejlesztett ) hallok.Áramgenerátorral megtáplálom , és a B hatására megképződik a hall feszültség amit multiméterrel mérek
Tudják a 1.5 teslát de az összehasonlításnál én a szétszedett motornál sokkal kisebb értékeket várok.... Régóta akartam egy indukciómérőt de sajnáltam rá a 70 e ft ot . Németországból vettem 7 cellát 25 euróért
Tudják a 1.5 teslát de az összehasonlításnál én a szétszedett motornál sokkal kisebb értékeket várok.... Régóta akartam egy indukciómérőt de sajnáltam rá a 70 e ft ot . Németországból vettem 7 cellát 25 euróért
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2018 március 04, 19:45
Írta: Szalai György Dátum 2018 március 04, 19:45
Az klassz, annyiból jut mindenkinek.[#vigyor2]
Én is összeszedek mindent, amivel mérni lehet valamit, de mágneses térerőt egyszerűen nem tudok mérni. Bonyolultul tudnék.
Nekem a rezgetett tekercses mágnesmérés tűnt házilag megvalósíthatónak, ebben a méréstartományban.
De a Hall biztos egyszerűbb.
Én is összeszedek mindent, amivel mérni lehet valamit, de mágneses térerőt egyszerűen nem tudok mérni. Bonyolultul tudnék.
Nekem a rezgetett tekercses mágnesmérés tűnt házilag megvalósíthatónak, ebben a méréstartományban.
De a Hall biztos egyszerűbb.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 04, 20:02
Írta: PSoft Dátum 2018 március 04, 20:02
Jujjjj, de jóóó![#eljen][#worship]
"Az ilyen szétszedés után térerősséget KELLENE MÉRNI!!"
Ebben csak az a nem jó, hogy könnyen lehet...eső után köpönyeg a mérés eredménye.:(
Én most, minden mindegy alapon boncoltam azt a léptecset.
"Legfeljebb lesz egy fasza...macskadobálóm a teszt végére."
Írtam, még az elején.
(hogy mégse az lett belőle, az...nem rajtam múlott):)
Valami olyat is "összefabrikálhatnál", ami még a bontás előtt kiabál, hogy NEEE csináld, mert ebből...macskadobáló lesz![#vigyor2]
"Az ilyen szétszedés után térerősséget KELLENE MÉRNI!!"
Ebben csak az a nem jó, hogy könnyen lehet...eső után köpönyeg a mérés eredménye.:(
Én most, minden mindegy alapon boncoltam azt a léptecset.
"Legfeljebb lesz egy fasza...macskadobálóm a teszt végére."
Írtam, még az elején.
(hogy mégse az lett belőle, az...nem rajtam múlott):)
Valami olyat is "összefabrikálhatnál", ami még a bontás előtt kiabál, hogy NEEE csináld, mert ebből...macskadobáló lesz![#vigyor2]
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2018 március 04, 20:50
Írta: ANTAL GÁBOR Dátum 2018 március 04, 20:50
A 46 ost olvasd el !
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2018 március 05, 09:58
Írta: svejk Dátum 2018 március 05, 09:58
A 46-al csak az a baj, hogy én még nem is találkoztam leégett motorral.
Megütik, elgörbül a tengely, a pajzsot elütik oldalra, víz folyik bele (rozsda koma) vagy csak a sok használattól lesz csapágyas, ennyi.. az össz. hibalehetőség.
Olyanra nem térnék ki, hogy megforog a tengely a forgórészben mert az már eleve komolytalan moci lehetett.
Megütik, elgörbül a tengely, a pajzsot elütik oldalra, víz folyik bele (rozsda koma) vagy csak a sok használattól lesz csapágyas, ennyi.. az össz. hibalehetőség.
Olyanra nem térnék ki, hogy megforog a tengely a forgórészben mert az már eleve komolytalan moci lehetett.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 05, 19:51
Írta: PSoft Dátum 2018 március 05, 19:51
Vagy csak úgy egyszerűen...kiesik az ember kezéből az a motor![#rinya]
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_fjjh2gdi3fh77e6c5p769_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/fjjh2gdi3fh77e6c5p769_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_sw8ai6nxcvwic56mpdzhk_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/sw8ai6nxcvwic56mpdzhk_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_scww8h2waay7yu0iqtvw_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/scww8h2waay7yu0iqtvw_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_mx930p549eu3d69i5w47q_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/mx930p549eu3d69i5w47q_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_p040tp8784dsq4kcwjy8_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/p040tp8784dsq4kcwjy8_1068.jpg)
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_fjjh2gdi3fh77e6c5p769_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/fjjh2gdi3fh77e6c5p769_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_sw8ai6nxcvwic56mpdzhk_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/sw8ai6nxcvwic56mpdzhk_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_scww8h2waay7yu0iqtvw_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/scww8h2waay7yu0iqtvw_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_mx930p549eu3d69i5w47q_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/mx930p549eu3d69i5w47q_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_p040tp8784dsq4kcwjy8_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/p040tp8784dsq4kcwjy8_1068.jpg)
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2018 március 05, 20:24
Írta: Szalai György Dátum 2018 március 05, 20:24
Vajon mennyiért készítenének ma egy ilyen sokpólusú karikát Sm2Co17-ből?
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 05, 21:09
Írta: PSoft Dátum 2018 március 05, 21:09
Biztos nem annyiért, amennyiért hobby berkekben körbe-körbe jár egy ilyen pöpec kis motor.
Ha mindenki csak picit gondol, akkor se olyan rossz még...ötödiknek sem lenni a sorban.:)
Ha mindenki csak picit gondol, akkor se olyan rossz még...ötödiknek sem lenni a sorban.:)
Cím: Re:Léptetőmotor
Írta: swghderh5 Dátum 2018 március 05, 21:30
Írta: swghderh5 Dátum 2018 március 05, 21:30
Sziasztok !
Az volna a kérdésem,hogy mi a különbség a léptető motorok közt pl: NEMA34 Stepper Motor 1100oz.in 4A Driver 7.8A Engrave illetve a Nema34 Stepper Motor 1232oz.in 5.6A&Driver DM860A
melyiket válasszam??!! Azok a számok mit jelentenek?? 1232 ill. 1100..Köszi a válaszokat előre is
Üdv Gyuri
Az volna a kérdésem,hogy mi a különbség a léptető motorok közt pl: NEMA34 Stepper Motor 1100oz.in 4A Driver 7.8A Engrave illetve a Nema34 Stepper Motor 1232oz.in 5.6A&Driver DM860A
melyiket válasszam??!! Azok a számok mit jelentenek?? 1232 ill. 1100..Köszi a válaszokat előre is
Üdv Gyuri
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2018 március 05, 21:42
Írta: zozo Dátum 2018 március 05, 21:42
Az 1232oz.in a nyomatékát jelöli, átváltva Nm-re ez kb. 8,7Nm.
Cím: Re:Léptetőmotor
Írta: dezsoe Dátum 2018 március 05, 21:43
Írta: dezsoe Dátum 2018 március 05, 21:43
Szia!
El kell osztani 141,61193227806-tal és megkapod Nm-ben. Pöpec tengerentúli mértékegység. :) (ounce/inch)
El kell osztani 141,61193227806-tal és megkapod Nm-ben. Pöpec tengerentúli mértékegység. :) (ounce/inch)
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2018 március 05, 21:44
Írta: zozo Dátum 2018 március 05, 21:44
Lemaradt, az 1100 oz.in pedig 7,7Nm-nek felel meg.
A neten találsz rá konvertert.
A neten találsz rá konvertert.
Cím: Re:Léptetőmotor
Írta: dezsoe Dátum 2018 március 05, 21:44
Írta: dezsoe Dátum 2018 március 05, 21:44
Illetve nem ounce*inch, bocs.
Cím: Re:Léptetőmotor
Írta: swghderh5 Dátum 2018 március 05, 21:56
Írta: swghderh5 Dátum 2018 március 05, 21:56
Nagyon szépen köszönöm nektek!! Most már képbe vagyok valamennyire!! [#circling]
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2018 március 05, 22:31
Írta: svejk Dátum 2018 március 05, 22:31
Ez a múltkori D.laci féle? [#wow1]
Cím: Re:Léptetőmotor
Írta: sasi Dátum 2018 március 05, 22:40
Írta: sasi Dátum 2018 március 05, 22:40
A léptetőmotorok között is akad olyan, mely képes pörögni.
A polcomon pihen egy ilyen, mely 1.500 1/min, a maximuma 3.000 1/min, 4,52 Nm.
Adatlapja. (http://www.ni.com/datasheet/pdf/en/ds-311)
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_dumx8zksddyfp4m6bc9d_205.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/dumx8zksddyfp4m6bc9d_205.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_6n4xacp7cqmwsw4i23d0_205.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/6n4xacp7cqmwsw4i23d0_205.jpg)
A polcomon pihen egy ilyen, mely 1.500 1/min, a maximuma 3.000 1/min, 4,52 Nm.
Adatlapja. (http://www.ni.com/datasheet/pdf/en/ds-311)
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_dumx8zksddyfp4m6bc9d_205.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/dumx8zksddyfp4m6bc9d_205.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_6n4xacp7cqmwsw4i23d0_205.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/6n4xacp7cqmwsw4i23d0_205.jpg)
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 05, 22:42
Írta: PSoft Dátum 2018 március 05, 22:42
Sejtettem hogy rákérdezel, de...nem!
Vigyázok én arra...rendesen!:)
(most hirtelen...azt se tudom, hol van)[#nemtudom]
Ez egy másik. Később került hozzám, már így, törött mágnessel.
De...ezt se tudom, most hol van.[#nevetes1]
(csak a képeket találtam meg hirtelen, az [5769]apropóján)
Vigyázok én arra...rendesen!:)
(most hirtelen...azt se tudom, hol van)[#nemtudom]
Ez egy másik. Később került hozzám, már így, törött mágnessel.
De...ezt se tudom, most hol van.[#nevetes1]
(csak a képeket találtam meg hirtelen, az [5769]apropóján)
Cím: Re:Léptetőmotor
Írta: rokonok Dátum 2018 március 07, 22:22
Írta: rokonok Dátum 2018 március 07, 22:22
Valaki rájött a léptecs ha csak önmagába áll és nagy fordulaton akarom pörgetni csak ide-oda mocorog. Ha lefogom elindul rendesen. Ez minek tulajdonítható?
Cím: Re:Léptetőmotor
Írta: designr Dátum 2018 március 07, 23:09
Írta: designr Dátum 2018 március 07, 23:09
A forgórésznek a sulya miatt van egy tehetetlensége.ha rögzités nélkül akarod hirtelen egységugráshoz hasonló gyorsasággal meginditani akkor a z állórészt is "viszi" magával.
Tesztet nagy fordulaton csak lerögzitett motorral vagy "rálépve" végzünk.
Szervóknál pl autotuningot ugyancsak nem érdemes rögzítetlen motorral..ugyanilyen oknál fogva csak "vibromotor" mozgás lesz belőlle.
Tesztet nagy fordulaton csak lerögzitett motorral vagy "rálépve" végzünk.
Szervóknál pl autotuningot ugyancsak nem érdemes rögzítetlen motorral..ugyanilyen oknál fogva csak "vibromotor" mozgás lesz belőlle.
Cím: Re:Léptetőmotor
Írta: designr Dátum 2018 március 07, 23:29
Írta: designr Dátum 2018 március 07, 23:29
Ezt a "viszi"magával persze ugy értsd hogy induláskor a forgórész tehetetlensége és az állórész rögzitetlensége miatt nem csak a forgórész indul el ,hanem az állórészt elinditja csak ellenkező irányba..
Cím: Re:Léptetőmotor
Írta: szabo janko Dátum 2018 március 10, 12:16
Írta: szabo janko Dátum 2018 március 10, 12:16
Az egy dolog hogy mi van ráírva. Én próbálgattam pörgetni MSD vezérlővel kevés sikerrel. Csak a saját KOLMORGEN-es vezérlővel sikerülhet. Azt meg hiába kötöttem a gépkönyv szerint 220 V ra eldurrant.
Cím: Re:Léptetőmotor
Írta: szabo janko Dátum 2018 március 10, 12:18
Írta: szabo janko Dátum 2018 március 10, 12:18
Bocsi erre akartam válaszolni
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2018 március 10, 14:00
Írta: svejk Dátum 2018 március 10, 14:00
Mi volt a jelenség az MSD-vel?
lehet sokkal kisebb az indulóktivitása mint a kommersznek?
MSDD-vel nincs lehetőséged kipróbálni?
Az elvileg méregeti a motort az autotuning során.
lehet sokkal kisebb az indulóktivitása mint a kommersznek?
MSDD-vel nincs lehetőséged kipróbálni?
Az elvileg méregeti a motort az autotuning során.
Cím: Re:Léptetőmotor
Írta: szabo janko Dátum 2018 március 10, 14:11
Írta: szabo janko Dátum 2018 március 10, 14:11
Ilyenem volt. Működik csak lassú.
Cím: Re:Léptetőmotor
Írta: xsugix Dátum 2018 március 12, 17:24
Írta: xsugix Dátum 2018 március 12, 17:24
Szia!
Milyen vezérlő volt, ami elpukkant? Típus..
Milyen vezérlő volt, ami elpukkant? Típus..
Cím: Re:Léptetőmotor
Írta: szabo janko Dátum 2018 március 13, 07:17
Írta: szabo janko Dátum 2018 március 13, 07:17
A motorhoz való KOLMORGEN. A gépkönyv szerint bekötve 220-ra.
Bekapcsolás után pukk. A bekötést más is ellenőrizte nem volt elkötve. Két példány is így járt.
Bekapcsolás után pukk. A bekötést más is ellenőrizte nem volt elkötve. Két példány is így járt.
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 13, 16:19
Írta: J-Steel Dátum 2018 március 13, 16:19
Régi komment, de hátha emlékeztek még.
Tegnap miközben szerelgettem a bipoláris léptetőmet, megvizsgáltam a vasmagot, és arra jöttem rá, hogy nem egydarabból készülnek a lemezek, hanem több darab van egy síkon összeillesztve.
Ebből arra következtetek, hogy aki erős mágneses hatást mér a motor külsején, annak nem az elektroacélon záródik mágneses fluxus az állórészen, hanem valahol kilép. Talán túl nagyok a légrések az összeillesztésnél, vagy sok volt a gyanta.
Tegnap miközben szerelgettem a bipoláris léptetőmet, megvizsgáltam a vasmagot, és arra jöttem rá, hogy nem egydarabból készülnek a lemezek, hanem több darab van egy síkon összeillesztve.
Ebből arra következtetek, hogy aki erős mágneses hatást mér a motor külsején, annak nem az elektroacélon záródik mágneses fluxus az állórészen, hanem valahol kilép. Talán túl nagyok a légrések az összeillesztésnél, vagy sok volt a gyanta.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2018 március 13, 16:29
Írta: svejk Dátum 2018 március 13, 16:29
Ha nem szénné égett akkor szívesen belenéznék, esetleg lehet életet tudnék lehelni bele.
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2018 március 13, 16:45
Írta: jani300 Dátum 2018 március 13, 16:45
Esetleg egy fénykép ? Hogy jól értem-e amit írsz .
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 13, 16:51
Írta: J-Steel Dátum 2018 március 13, 16:51
Később.
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2018 március 13, 17:00
Írta: jani300 Dátum 2018 március 13, 17:00
Jaj , hát nem sürgős :)
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 13, 17:48
Írta: J-Steel Dátum 2018 március 13, 17:48
Valamit rosszul láthattam, összetévesztettem a külső összehegesztést az illesztéssel.
DE, a csatolmányban egy léptetőmotor állórészének képe.
Az enyém pl. a valóságban magasabb, de szemléltetésnek ez is jó.
Az állórész lapokból áll, ahogyan a kép ezt jól mutatja is. A kék vonalnál látható illesztések között hézag van, és szerény véleményem szerint úgy van lekezelve a lapok felülete, hogy két lap az összeillesztésnél ne tudjon jól elekromos áramot vezetni. Így a fluxusváltozás nem tud akkora köráramot létrehozni, mintha az egész állórész tömör lenne.
Az állórészt ha odaképzeljük a közepébe, ott úgy van a mágnes, hogy felfele az egyik pólus lefelé a másik pólus néz. Emiatt a mágneses fluxus álló helyzetben a piros nyíl szerint alakul, ahol a felső nyíl a forgórészbe visszamutat.
Elképzelésem szerint, ha a motor úgy van elkészítve, hogy a ezek a lemezek:
- Távolabb vannak egymástól
- Anyaghiba van a lemezek között
- Nem egyforma permeabilitású lemezek kerülnek bele
Akkor a mágneses fluxus egy része kiléphet a levegőbe. És ha odaérintünk egy ferromágneses anyagot, akkor azt erősebben vonzza.
Persze az is lehehet amit korábban írtak, hogy olyan űberbrutál módon sikerült felmágnesezni a mágnest, hogy a rendelkezésre álló vas nem elég az erővonalaknak, akkor ki kell lépniük a levegőbe.
Ha pedig megmelegítettük a motort, akkor a forgórész mágnese veszített térősségéből, és ugyanúgy csökken a vasból kifelé mutató fluxus mennyisége.
DE, a csatolmányban egy léptetőmotor állórészének képe.
Az enyém pl. a valóságban magasabb, de szemléltetésnek ez is jó.
Az állórész lapokból áll, ahogyan a kép ezt jól mutatja is. A kék vonalnál látható illesztések között hézag van, és szerény véleményem szerint úgy van lekezelve a lapok felülete, hogy két lap az összeillesztésnél ne tudjon jól elekromos áramot vezetni. Így a fluxusváltozás nem tud akkora köráramot létrehozni, mintha az egész állórész tömör lenne.
Az állórészt ha odaképzeljük a közepébe, ott úgy van a mágnes, hogy felfele az egyik pólus lefelé a másik pólus néz. Emiatt a mágneses fluxus álló helyzetben a piros nyíl szerint alakul, ahol a felső nyíl a forgórészbe visszamutat.
Elképzelésem szerint, ha a motor úgy van elkészítve, hogy a ezek a lemezek:
- Távolabb vannak egymástól
- Anyaghiba van a lemezek között
- Nem egyforma permeabilitású lemezek kerülnek bele
Akkor a mágneses fluxus egy része kiléphet a levegőbe. És ha odaérintünk egy ferromágneses anyagot, akkor azt erősebben vonzza.
Persze az is lehehet amit korábban írtak, hogy olyan űberbrutál módon sikerült felmágnesezni a mágnest, hogy a rendelkezésre álló vas nem elég az erővonalaknak, akkor ki kell lépniük a levegőbe.
Ha pedig megmelegítettük a motort, akkor a forgórész mágnese veszített térősségéből, és ugyanúgy csökken a vasból kifelé mutató fluxus mennyisége.
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 13, 17:49
Írta: J-Steel Dátum 2018 március 13, 17:49
A hiányzó kép.
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_8cd3d4yjxgxd0iudqdiyu_4880.png) (https://hobbicncforum.hu/uploaded_images/2018/03/8cd3d4yjxgxd0iudqdiyu_4880.png)
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_8cd3d4yjxgxd0iudqdiyu_4880.png) (https://hobbicncforum.hu/uploaded_images/2018/03/8cd3d4yjxgxd0iudqdiyu_4880.png)
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 13, 18:04
Írta: PSoft Dátum 2018 március 13, 18:04
Ha csak kívülről, szétszedés nélkül vizsgáltad az állórész lemezelését, a...látszat csal.:)
Egy darabból vannak azok a lemezek.
A NEMA17-eseknél,az állórész vasalás szemközti két oldalán, átlósan látható a csalóka "jelenség".
-Az első képen, amit kívülről látsz.(NEMA17-es motorok)
-A második képen, kicsit közelebbről, az első pajzsot levéve.
-A harmadik képen látható, hogy csak egy íves "köröm" van stancolva a lemezbe, maga a lemez folytonos.
(valószínű, hogy csak a lemezcsomag gépi összerakását segítő hornyok lehetnek)
A lemezcsomag szegecselt, a négy sarkán, két-két összefogó/rögzítő szegeccsel.
-A negyedik-ötödik képen, ugyanannak a gyártónak egy NEMA23-as motorja.
Ennél, a motor mind a négy oldalán, két-két hegesztési varrat a lemezcsomag rögzítésére.
Szerintem, ugyanolyan íves stancolás van a 23-asokon is, mint a 17-eseknél, csak a 23-asoknál, a nagyobb test miatt a stancolás vonala hegesztett.
A szegecseknek stancolt furatok a 23-asoknál is megvannak, csak üresen, szegecsek nélkül.
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_bdv3k0uh606cygepvifye_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/bdv3k0uh606cygepvifye_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_cp729advadfjuggi2chq5_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/cp729advadfjuggi2chq5_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_tys8h9v0x9dfx9ajwpga_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tys8h9v0x9dfx9ajwpga_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_wbyf89tct50dms6x2kqj_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/wbyf89tct50dms6x2kqj_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_fq34mxbbfawd7f5s3j2z_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/fq34mxbbfawd7f5s3j2z_1068.jpg)
Egy darabból vannak azok a lemezek.
A NEMA17-eseknél,az állórész vasalás szemközti két oldalán, átlósan látható a csalóka "jelenség".
-Az első képen, amit kívülről látsz.(NEMA17-es motorok)
-A második képen, kicsit közelebbről, az első pajzsot levéve.
-A harmadik képen látható, hogy csak egy íves "köröm" van stancolva a lemezbe, maga a lemez folytonos.
(valószínű, hogy csak a lemezcsomag gépi összerakását segítő hornyok lehetnek)
A lemezcsomag szegecselt, a négy sarkán, két-két összefogó/rögzítő szegeccsel.
-A negyedik-ötödik képen, ugyanannak a gyártónak egy NEMA23-as motorja.
Ennél, a motor mind a négy oldalán, két-két hegesztési varrat a lemezcsomag rögzítésére.
Szerintem, ugyanolyan íves stancolás van a 23-asokon is, mint a 17-eseknél, csak a 23-asoknál, a nagyobb test miatt a stancolás vonala hegesztett.
A szegecseknek stancolt furatok a 23-asoknál is megvannak, csak üresen, szegecsek nélkül.
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_bdv3k0uh606cygepvifye_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/bdv3k0uh606cygepvifye_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_cp729advadfjuggi2chq5_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/cp729advadfjuggi2chq5_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_tys8h9v0x9dfx9ajwpga_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tys8h9v0x9dfx9ajwpga_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_wbyf89tct50dms6x2kqj_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/wbyf89tct50dms6x2kqj_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_fq34mxbbfawd7f5s3j2z_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/fq34mxbbfawd7f5s3j2z_1068.jpg)
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 13, 18:17
Írta: PSoft Dátum 2018 március 13, 18:17
A második-harmadik képen az is látható, hogy az összeszerelt állórész lemezelésén...
Az első és az utolsó lemez maga egy síkolt/esztergált illesztő váll.
Ez ad precíz illesztőfelületet a motorpajzsoknak.:)
Az első és az utolsó lemez maga egy síkolt/esztergált illesztő váll.
Ez ad precíz illesztőfelületet a motorpajzsoknak.:)
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2018 március 13, 18:45
Írta: jani300 Dátum 2018 március 13, 18:45
Az enyémek nem is ilyenek ! Porosabbak :)
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_4di7jdjqchbgxe4xu54za_2430.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/4di7jdjqchbgxe4xu54za_2430.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_0zmx4edtc6ib9mtuj8ck_2430.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/0zmx4edtc6ib9mtuj8ck_2430.jpg)
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_4di7jdjqchbgxe4xu54za_2430.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/4di7jdjqchbgxe4xu54za_2430.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_0zmx4edtc6ib9mtuj8ck_2430.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/0zmx4edtc6ib9mtuj8ck_2430.jpg)
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 március 13, 19:47
Írta: PSoft Dátum 2018 március 13, 19:47
Nem is látszik a ...por rajtuk![#vigyor2]
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2018 március 13, 20:33
Írta: jani300 Dátum 2018 március 13, 20:33
[#wow3] Túl kicsik voltak a motorok :)
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_4u4a5zthi5qswiv0hfi4v_2430.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/4u4a5zthi5qswiv0hfi4v_2430.jpg)
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_4u4a5zthi5qswiv0hfi4v_2430.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/4u4a5zthi5qswiv0hfi4v_2430.jpg)
Cím: Re:Léptetőmotor
Írta: szabo janko Dátum 2018 március 14, 07:23
Írta: szabo janko Dátum 2018 március 14, 07:23
Köszönöm a lehetőséget de xsugix kollégával már hamarabb felvettem a kapcsolatot.
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2018 március 15, 12:20
Írta: zozo Dátum 2018 március 15, 12:20
Érdekesség képpen...
A múltkoriban szó volt róla, most feltettem egy videót, milyen csúnyán lépked a stepper motor mikrolépésekkel is.
Sajna a DRV8825 és A4988 driverrel készült videó már nincs meg, de érzékelhető volt, hogy a legzajosabb lépkedést a DRV8825 követte el.
A legszebben a korábban tesztelt DM556D vezérlőm léptetett, a videón pedig TB6560 van.
A múltkoriban szó volt róla, most feltettem egy videót, milyen csúnyán lépked a stepper motor mikrolépésekkel is.
Sajna a DRV8825 és A4988 driverrel készült videó már nincs meg, de érzékelhető volt, hogy a legzajosabb lépkedést a DRV8825 követte el.
A legszebben a korábban tesztelt DM556D vezérlőm léptetett, a videón pedig TB6560 van.
Cím: Re:Léptetőmotor
Írta: szf Dátum 2018 március 15, 12:42
Írta: szf Dátum 2018 március 15, 12:42
Az arduino alatt milyen panel van amin az lpt port is van?
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2018 március 15, 13:29
Írta: zozo Dátum 2018 március 15, 13:29
Csak egy sima LPT kifejtő panel. Ilyen:
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_p45p0qymf0f4kzg5isef0_2204.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/p45p0qymf0f4kzg5isef0_2204.jpg)
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_p45p0qymf0f4kzg5isef0_2204.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/p45p0qymf0f4kzg5isef0_2204.jpg)
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2018 március 15, 13:31
Írta: zozo Dátum 2018 március 15, 13:31
Erre meg egy LPT teszter van dugva, mert keresgéltem a PIN-eket :)
Cím: Re:Léptetőmotor
Írta: szf Dátum 2018 március 15, 20:35
Írta: szf Dátum 2018 március 15, 20:35
Köszönöm
Cím: Re:Léptetőmotor
Írta: jau5ccsn9 Dátum 2018 március 22, 00:44
Írta: jau5ccsn9 Dátum 2018 március 22, 00:44
Üdv!
Lett egy Schneider Electric (Bereger-Lahr) VRDM564/50 LMA 5 fázisú léptető motorom (70V, 0.95A) Ehhez kell külön meghajtó, vagy rá van építve minden? Nem találok róla semmit a neten [#nemtudom]
Köszi a segítséget!
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_30e6s3gfeysj9043u456_5664.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/30e6s3gfeysj9043u456_5664.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_ivj3t9cssf4s2htjgev_5664.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/ivj3t9cssf4s2htjgev_5664.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_y0y3fbykd8tvugei8j7a_5664.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/y0y3fbykd8tvugei8j7a_5664.jpg)
Lett egy Schneider Electric (Bereger-Lahr) VRDM564/50 LMA 5 fázisú léptető motorom (70V, 0.95A) Ehhez kell külön meghajtó, vagy rá van építve minden? Nem találok róla semmit a neten [#nemtudom]
Köszi a segítséget!
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_30e6s3gfeysj9043u456_5664.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/30e6s3gfeysj9043u456_5664.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_ivj3t9cssf4s2htjgev_5664.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/ivj3t9cssf4s2htjgev_5664.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_y0y3fbykd8tvugei8j7a_5664.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/y0y3fbykd8tvugei8j7a_5664.jpg)
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 22, 02:09
Írta: J-Steel Dátum 2018 március 22, 02:09
Üdv!
A kérdésre nem tudok válaszolni, de érdekelne, hogy a képen az IC-kre mi van ráírva?
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_wtp050txkw7wne5d5ngsd_4880.png) (https://hobbicncforum.hu/uploaded_images/2018/03/wtp050txkw7wne5d5ngsd_4880.png)
A kérdésre nem tudok válaszolni, de érdekelne, hogy a képen az IC-kre mi van ráírva?
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_wtp050txkw7wne5d5ngsd_4880.png) (https://hobbicncforum.hu/uploaded_images/2018/03/wtp050txkw7wne5d5ngsd_4880.png)
Cím: Re:Léptetőmotor
Írta: jau5ccsn9 Dátum 2018 március 22, 09:26
Írta: jau5ccsn9 Dátum 2018 március 22, 09:26
2darab:
JM96AFE3
LMD18200T
3 darab:
JM02ABE3
LMD1800T
JM96AFE3
LMD18200T
3 darab:
JM02ABE3
LMD1800T
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 22, 11:32
Írta: J-Steel Dátum 2018 március 22, 11:32
Kérhetnék képet külön az LMD1800T-ről? Arról nem találok semmit.
Annyit találtam, hogy a másik IC, az 18200-as egy max 55V / 3A-es H-Hidas IC, ami irány és impulzus jeleket fogad.
Alapvetően DC motor példákat hoz az adatlapon, de azt írja Stepper-re is jó.
Annyit találtam, hogy a másik IC, az 18200-as egy max 55V / 3A-es H-Hidas IC, ami irány és impulzus jeleket fogad.
Alapvetően DC motor példákat hoz az adatlapon, de azt írja Stepper-re is jó.
Cím: Re:Léptetőmotor
Írta: jau5ccsn9 Dátum 2018 március 22, 11:49
Írta: jau5ccsn9 Dátum 2018 március 22, 11:49
Bocsánat, elírtam. Az is LMD18200T. És van még egy P+ jelzés mindegyiken.
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 22, 11:53
Írta: J-Steel Dátum 2018 március 22, 11:53
Tehát mind az öt IC egyforma (LMD18200).
És 5 fázisú a stepper. Akkor úgy tűnik, hogy a "végfok" ott van. Láttam szenzort is.
Már csak azt kell megnézni, hogy milyen más IC-k vannak a penelon, amik esetleg a vezérlést végeznék.
Küldj még infót!
És 5 fázisú a stepper. Akkor úgy tűnik, hogy a "végfok" ott van. Láttam szenzort is.
Már csak azt kell megnézni, hogy milyen más IC-k vannak a penelon, amik esetleg a vezérlést végeznék.
Küldj még infót!
Cím: Re:Léptetőmotor
Írta: jau5ccsn9 Dátum 2018 március 22, 12:34
Írta: jau5ccsn9 Dátum 2018 március 22, 12:34
Remélem így látszik minden.
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_e70e6qx04wfjcj7xvk6_5664.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/e70e6qx04wfjcj7xvk6_5664.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_a9bwkfbxq6mngsncx793j_5664.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/a9bwkfbxq6mngsncx793j_5664.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_0wx7inp2j7aj2tvwe4ef_5664.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/0wx7inp2j7aj2tvwe4ef_5664.jpg)
(https://hobbicncforum.hu/uploaded_images/2018/03/tn_e70e6qx04wfjcj7xvk6_5664.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/e70e6qx04wfjcj7xvk6_5664.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_a9bwkfbxq6mngsncx793j_5664.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/a9bwkfbxq6mngsncx793j_5664.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/tn_0wx7inp2j7aj2tvwe4ef_5664.jpg) (https://hobbicncforum.hu/uploaded_images/2018/03/0wx7inp2j7aj2tvwe4ef_5664.jpg)
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 22, 14:12
Írta: J-Steel Dátum 2018 március 22, 14:12
Az a nagy ALTERA FLEX ic egy hatalmas programozható logikai kapuhálózat.
Azt gondolom, hogy a gyártó mérnökei készítették el a kódot, és konfigurálták ("felprogramozták"), hogy a léptetőmotor vezérlését ellássa. Belső méretéből adódóan megfelel erre a célre.
Ez tehát nem egy olyan IC aminek az adatlapját letöltjük, és kiderül mit hova kell kötni.
Így már tudok válaszolni arra a kérdésedre:
"Ehhez kell külön meghajtó, vagy rá van építve minden?"
Nem kell, erre már rá van építve minden.
Az, hogy mit tett bele a gyártó, hogy melyik lábán milyen jel kell érkezzen, azt a gyártó dokumentálta. Senki más nem tudja.
Ez kicsit olyan, mint amkor egy haver ad egy panelt, amin van egy mikrokontroller, de nem ad dokumentációt, hogy mit hova kössünk.
Esetleg van-e a házán, dobozán, a csatlakozókon írás, hogy a bekötésre rájöjjön az ember?
Azt gondolom, hogy a gyártó mérnökei készítették el a kódot, és konfigurálták ("felprogramozták"), hogy a léptetőmotor vezérlését ellássa. Belső méretéből adódóan megfelel erre a célre.
Ez tehát nem egy olyan IC aminek az adatlapját letöltjük, és kiderül mit hova kell kötni.
Így már tudok válaszolni arra a kérdésedre:
"Ehhez kell külön meghajtó, vagy rá van építve minden?"
Nem kell, erre már rá van építve minden.
Az, hogy mit tett bele a gyártó, hogy melyik lábán milyen jel kell érkezzen, azt a gyártó dokumentálta. Senki más nem tudja.
Ez kicsit olyan, mint amkor egy haver ad egy panelt, amin van egy mikrokontroller, de nem ad dokumentációt, hogy mit hova kössünk.
Esetleg van-e a házán, dobozán, a csatlakozókon írás, hogy a bekötésre rájöjjön az ember?
Cím: Re:Léptetőmotor
Írta: jau5ccsn9 Dátum 2018 március 22, 14:18
Írta: jau5ccsn9 Dátum 2018 március 22, 14:18
Köszi! Akkor marad Panasonic servo. Ha majd egyszer lesz mire felszerelnem.
Cím: Re:Léptetőmotor
Írta: jau5ccsn9 Dátum 2018 március 22, 14:21
Írta: jau5ccsn9 Dátum 2018 március 22, 14:21
Írás csak az van ami az 1. és a 3. fotón látszik. Még megpróbálom túrni a netet, hátha valamit találok.
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 22, 14:24
Írta: J-Steel Dátum 2018 március 22, 14:24
Igen már én is látom.
Van bemenő feszültség 36V és két egyedi csatlakozó.
Sajnos csak a gyártó tudja, hogy a csati tűin melyik mire való.
Van bemenő feszültség 36V és két egyedi csatlakozó.
Sajnos csak a gyártó tudja, hogy a csati tűin melyik mire való.
Cím: Re:Léptetőmotor
Írta: jau5ccsn9 Dátum 2018 március 22, 19:16
Írta: jau5ccsn9 Dátum 2018 március 22, 19:16
Az nagyon hülye ötlet, hogy a 1,2,3-as csatlakozók lehetnek a Step, Dir és Enable bemenetek? Ha így lenne, egy optocsatolós BOB-al ki lehetne találni.
Ezt találtam közben róla:Berger-Lahr (http://doczz.net/doc/957009/berger_lahr_5-phase_stepping_motors)
Ezt találtam közben róla:Berger-Lahr (http://doczz.net/doc/957009/berger_lahr_5-phase_stepping_motors)
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 22, 20:02
Írta: J-Steel Dátum 2018 március 22, 20:02
Írtam az osztrák leánycégnek, érdeklődvén a csatlakozók kiosztásáért. Ma már munkaidő után vagyunk, majd talán holnap vagy jövőhéten elővesznek.
Cím: Re:Léptetőmotor
Írta: jau5ccsn9 Dátum 2018 március 22, 20:25
Írta: jau5ccsn9 Dátum 2018 március 22, 20:25
Nagyon szépen köszönöm! Annyira nem fontos a dolog, hogy mindenáron beüzemeljük, de sajnáltam volna kidobni. Ha eljutok a debreceni talira, jövök egy sörrel. [#eljen]
Cím: Re:Léptetőmotor
Írta: rbbhbyvfs Dátum 2018 március 22, 21:46
Írta: rbbhbyvfs Dátum 2018 március 22, 21:46
Az első két csatlakozó ráadásul optikai, szóval nem egy mezei léptető + vezérló ami a kezedben van :)
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 23, 00:59
Írta: J-Steel Dátum 2018 március 23, 00:59
Kezd bonyolódni. Ha az amit a képen látunk valóban 2db optikai csatlakozó, akkor még rosszabb a helyzet, mert vagy az egyik a step és a másik a dir, vagy pedig valami szinkron soros port (órajel + adat), ami meg aztán végképp nem lesz sehol dokumentálva.
Lehet, hogy a végén az lesz a legegyszerűbb, ha eldobja az ember a vezérlőt, és valami kínai meghajtóval hajtja.
Lehet, hogy a végén az lesz a legegyszerűbb, ha eldobja az ember a vezérlőt, és valami kínai meghajtóval hajtja.
Cím: Re:Léptetőmotor
Írta: J-Steel Dátum 2018 március 27, 20:32
Írta: J-Steel Dátum 2018 március 27, 20:32
Nem írtak vissza. Gondoltam, hogy ez lesz. Nincs több ötletem. A Schneider nem egy olyan cég, aki törődik a kis hobbistákkal.
Cím: Re:Léptetőmotor
Írta: jau5ccsn9 Dátum 2018 március 27, 23:22
Írta: jau5ccsn9 Dátum 2018 március 27, 23:22
Köszi a fáradozásodért! Akkor marad a bontott servo... Ehhez meg egyszer beszerzek egy meghajtót. Vextát láttam az e-bayon 20$-ért. Üdv!
Cím: Re:Léptetőmotor
Írta: 3szwbavt Dátum 2018 július 28, 09:13
Írta: 3szwbavt Dátum 2018 július 28, 09:13
Üdv Mindenkinek!!!
Maslow CNC marót szeretnék csinálni és ebben kellene a segítség...
Erről lenne szó. Léptetőmotor? Szoftverek? Stb...
Tud ebben nekem valaki segíteni?
Maslow CNC marót szeretnék csinálni és ebben kellene a segítség...
Erről lenne szó. Léptetőmotor? Szoftverek? Stb...
Tud ebben nekem valaki segíteni?
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2018 július 28, 10:52
Írta: zozo Dátum 2018 július 28, 10:52
Rajzgépek szoftvere jó hozzá. Arduinoval egyszerű megoldani.
polar V (https://github.com/euphy/polargraphcontroller/releases/tag/2016-03-29-10-23)
Polar V rajzgépekre (polar V drawing robot polargraf) keress rá a neten, sok infót találsz.
Megjegyzem, a videón lévő szerkezet méretben és arányokban nagyon sokat csal, mivel a kötélágaknak minden helyzetben a maró központja felé kell(ene) mutatnia. Tehát így tervezd a szerkezetet.
A motorok nyomatéka meg függ a szerkezeted súlyától. surlódási tényezőktől, forgácsolási erőtől stb.
Mivel itt a forgácsolási erőt minimálisra kell venni, hogy lógó helyzetben a saját súlyától is képes legyen forgácsolni, így 1-2 Nm-nél nagyobb nyomatékra nem nagyon lesz szükség.
polar V (https://github.com/euphy/polargraphcontroller/releases/tag/2016-03-29-10-23)
Polar V rajzgépekre (polar V drawing robot polargraf) keress rá a neten, sok infót találsz.
Megjegyzem, a videón lévő szerkezet méretben és arányokban nagyon sokat csal, mivel a kötélágaknak minden helyzetben a maró központja felé kell(ene) mutatnia. Tehát így tervezd a szerkezetet.
A motorok nyomatéka meg függ a szerkezeted súlyától. surlódási tényezőktől, forgácsolási erőtől stb.
Mivel itt a forgácsolási erőt minimálisra kell venni, hogy lógó helyzetben a saját súlyától is képes legyen forgácsolni, így 1-2 Nm-nél nagyobb nyomatékra nem nagyon lesz szükség.
Cím: Re:Léptetőmotor
Írta: 3szwbavt Dátum 2018 július 28, 11:23
Írta: 3szwbavt Dátum 2018 július 28, 11:23
Köszi a hozzászólásodat.
Sajna rossz lett a yu link.
Bevallom nem értek hozzá ezért lenne jó valaki aki segít.
Konkrétan, pénzért. Építeni, beszerezni, megírni, installálni stb :-)
Sajna rossz lett a yu link.
Bevallom nem értek hozzá ezért lenne jó valaki aki segít.
Konkrétan, pénzért. Építeni, beszerezni, megírni, installálni stb :-)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2018 július 28, 12:50
Írta: 000000000 Dátum 2018 július 28, 12:50
"Megjegyzem, a videón lévő szerkezet méretben és arányokban nagyon sokat csal, mivel a kötélágaknak minden helyzetben a maró központja felé kell(ene) mutatnia."
Ezt így nem lehet kijelenteni, hiszen van olyan transzformációs modell, ami ezt az esetet is kezeli. Az én fejlesztésem is ilyen.
Ezt így nem lehet kijelenteni, hiszen van olyan transzformációs modell, ami ezt az esetet is kezeli. Az én fejlesztésem is ilyen.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2018 július 28, 12:54
Írta: 000000000 Dátum 2018 július 28, 12:54
Szia!
Van ehhez a kinematikához Robsy CNC vezérlő fejlesztésem.
Szívesen segítek, amiben tudok, egy plotter mintapéldányt is megnézhetsz működés közben, ha errefelé jársz.
Beszélgessünk a részletekről magánban.
Van ehhez a kinematikához Robsy CNC vezérlő fejlesztésem.
Szívesen segítek, amiben tudok, egy plotter mintapéldányt is megnézhetsz működés közben, ha errefelé jársz.
Beszélgessünk a részletekről magánban.
Cím: Re:Léptetőmotor
Írta: ecp4rs0md Dátum 2018 augusztus 17, 05:03
Írta: ecp4rs0md Dátum 2018 augusztus 17, 05:03
Van egy 8Nm-es léptetőm Longs Motor, DM860A vezérlővel, 60VDC táppal, adhatok neki 72VDC-t, jobb lesz, mármint erősebb és gyorsabb? A vezérlő 80V-ig írja de van értelme, érezhető ennyi változás? X tengelyen van, feleztem egy 5M-es szíjhajtással 25/5-ös golyósorsót hajt, megemelem a sebességet 500mm/min fölé már lépést veszt, pedig jó lenne akár 1000mm/min is legalább villámjáratnak.
Cím: Re:Léptetőmotor
Írta: svager Dátum 2018 augusztus 17, 06:22
Írta: svager Dátum 2018 augusztus 17, 06:22
Miért felezted a hajtást?
Cím: Re:Léptetőmotor
Írta: ecp4rs0md Dátum 2018 augusztus 17, 14:14
Írta: ecp4rs0md Dátum 2018 augusztus 17, 14:14
Szia! Nyomaték növelés céljából, gondoltam nem baj ha van tartalék.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2018 augusztus 17, 18:26
Írta: 000000000 Dátum 2018 augusztus 17, 18:26
Mekkora ez a gép?
Mire akarod használni?
Mire akarod használni?
Cím: Re:Léptetőmotor
Írta: ecp4rs0md Dátum 2018 augusztus 17, 18:43
Írta: ecp4rs0md Dátum 2018 augusztus 17, 18:43
Fém marásra használom, 1250*280 a mérete.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2018 augusztus 17, 19:09
Írta: 000000000 Dátum 2018 augusztus 17, 19:09
Ehhez a G.oróhoz, ezzel a motorral, nem feltétlen kellett volna a felező. Bár, nem tudom a mozgatott sújt.
A 12 volt feszültségnövelés ebben a tartományban, nem hoz látványos javulást, de hozna.
Kicsit erősebb, rugalmasabb lenne.
Az ezres sebességet így is bőven teljesíteni kellene. Látatlanba, legalább 1500 -ra gondolok.
Beállítási problémákat sejtek.
Úgymint: túl nagy mikro lépés, túlzott gyorsítás, stb.
A mechanikát is át kellene vizsgálni, szorulásokat, elakadásokat keresve.
Esetleg a gyenge PC nem tudja kiszolgálni.
A 12 volt feszültségnövelés ebben a tartományban, nem hoz látványos javulást, de hozna.
Kicsit erősebb, rugalmasabb lenne.
Az ezres sebességet így is bőven teljesíteni kellene. Látatlanba, legalább 1500 -ra gondolok.
Beállítási problémákat sejtek.
Úgymint: túl nagy mikro lépés, túlzott gyorsítás, stb.
A mechanikát is át kellene vizsgálni, szorulásokat, elakadásokat keresve.
Esetleg a gyenge PC nem tudja kiszolgálni.
Cím: Re:Léptetőmotor
Írta: ecp4rs0md Dátum 2018 augusztus 17, 21:22
Írta: ecp4rs0md Dátum 2018 augusztus 17, 21:22
A gép egy Lagun FU1250-es ezt alakítgatom. Az asztal üresen kb. 150kg + súrlódás, még állítgatok rajt de az éklécet is lehet túlhúztam.
Cím: Re:Léptetőmotor
Írta: svager Dátum 2018 augusztus 18, 05:26
Írta: svager Dátum 2018 augusztus 18, 05:26
Nálam két 20/5 orsó van áttétel nélkül,a híd 170kg a gyorsjárat meg 4500.
Nem tudom mekkora a súrlódás de a motornak áttétel nélkül is tudnia kell a 2000.
Nem tudom mekkora a súrlódás de a motornak áttétel nélkül is tudnia kell a 2000.
Cím: Re:Léptetőmotor
Írta: ecp4rs0md Dátum 2018 augusztus 18, 07:39
Írta: ecp4rs0md Dátum 2018 augusztus 18, 07:39
Mekkora motorral hajtod? Az neked linsinen van?
Cím: Re:Léptetőmotor
Írta: svager Dátum 2018 augusztus 18, 08:49
Írta: svager Dátum 2018 augusztus 18, 08:49
8Nm encoderes,de ettől függetlenül a motor paraméterek nem változnak,persze linsínen van
Cím: Re:Léptetőmotor
Írta: ecp4rs0md Dátum 2018 augusztus 30, 17:00
Írta: ecp4rs0md Dátum 2018 augusztus 30, 17:00
Egy az egyben viszi, úgy látszik a magsabb fordulatokat nem szereti. A villámjáratom 800 a gyáriaknak sem szoktak 1000-1200-nál többet adni mert összerágnak a felületek.
Cím: Re:Léptetőmotor
Írta: gaben Dátum 2018 szeptember 14, 18:53
Írta: gaben Dátum 2018 szeptember 14, 18:53
Sziasztok hozzáértők,
léptetőmotort lehet vezérelni potméterrel?
kösz, gaben
léptetőmotort lehet vezérelni potméterrel?
kösz, gaben
Cím: Re:Léptetőmotor
Írta: Devecz Miklós Dátum 2018 szeptember 14, 19:00
Írta: Devecz Miklós Dátum 2018 szeptember 14, 19:00
Lehet.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2018 szeptember 14, 19:06
Írta: 000000000 Dátum 2018 szeptember 14, 19:06
Persze. Hiszen csak annyi az egész, hogy a potméter tekergetése step/dir jelet eredményezzen egy elektronika kapcsán, és ezek a jelek a léptetőmotor vezérlővel is összeköttetésben legyenek. És már forog is a motor.
A komolyabbak pedig még forgásirányt is váltanak a potméter középállásánál, így nem kell kapcsolóval vacakolni.
Szuper ilyen kis áramkör fejlesztéseim vannak.
A komolyabbak pedig még forgásirányt is váltanak a potméter középállásánál, így nem kell kapcsolóval vacakolni.
Szuper ilyen kis áramkör fejlesztéseim vannak.
Cím: Re:Léptetőmotor
Írta: gaben Dátum 2018 szeptember 14, 19:22
Írta: gaben Dátum 2018 szeptember 14, 19:22
Szia Robsy,
na ez érdekelne.
Írok privátot.
na ez érdekelne.
Írok privátot.
Cím: Re:Léptetőmotor
Írta: 2am4nwzib Dátum 2018 szeptember 14, 19:25
Írta: 2am4nwzib Dátum 2018 szeptember 14, 19:25
.
(https://hobbicncforum.hu/uploaded_images/2018/09/tn_32e5hg8392by53kwve5yp_5949.jpg) (https://hobbicncforum.hu/uploaded_images/2018/09/32e5hg8392by53kwve5yp_5949.jpg)
(https://hobbicncforum.hu/uploaded_images/2018/09/tn_32e5hg8392by53kwve5yp_5949.jpg) (https://hobbicncforum.hu/uploaded_images/2018/09/32e5hg8392by53kwve5yp_5949.jpg)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2018 szeptember 14, 19:35
Írta: 000000000 Dátum 2018 szeptember 14, 19:35
Ez valami agyrém!!!!![#csodalk][#conf]
Cím: Re:Léptetőmotor
Írta: bundyland Dátum 2018 szeptember 14, 19:37
Írta: bundyland Dátum 2018 szeptember 14, 19:37
Én is akartam írni hogyha csinál valamit akkor ezt ne!
BORZALMAS!
BORZALMAS!
Cím: Re:Léptetőmotor
Írta: 2am4nwzib Dátum 2018 szeptember 14, 20:14
Írta: 2am4nwzib Dátum 2018 szeptember 14, 20:14
Nem tudom hogy mennyire agyrém (nem próbáltam ki), a szerzoje Colin Mitchel forras itt (https://www.slideshare.net/marcostonon1/50-555-circuits-22768180)
(https://hobbicncforum.hu/uploaded_images/2018/09/tn_i87ch6x5i42g8h783_5949.jpg) (https://hobbicncforum.hu/uploaded_images/2018/09/i87ch6x5i42g8h783_5949.jpg)
(https://hobbicncforum.hu/uploaded_images/2018/09/tn_i87ch6x5i42g8h783_5949.jpg) (https://hobbicncforum.hu/uploaded_images/2018/09/i87ch6x5i42g8h783_5949.jpg)
Cím: Re:Léptetőmotor
Írta: bundyland Dátum 2018 szeptember 14, 20:41
Írta: bundyland Dátum 2018 szeptember 14, 20:41
Az nem kizárt hogy működik, de ez csak és kizárolag valami kényszer megoldás lehet. Eleve az 555-nek 1 kimenete van, tehát 4 tranzisztort nem hajthat függetlenül. A 2 es láb bemenet(trigger) a rajzon kimenetnek van használva.
Aztán meg a jelalakok milyenek lehetnek arról ne is beszéljünk.
Aztán meg a jelalakok milyenek lehetnek arról ne is beszéljünk.
Cím: Re:Léptetőmotor
Írta: 2am4nwzib Dátum 2018 szeptember 14, 20:48
Írta: 2am4nwzib Dátum 2018 szeptember 14, 20:48
Nem tudom , de egy probát megérne.
(https://hobbicncforum.hu/uploaded_images/2018/09/tn_ujfxisuqiyky7ffx9pxs_5949.jpg) (https://hobbicncforum.hu/uploaded_images/2018/09/ujfxisuqiyky7ffx9pxs_5949.jpg)
(https://hobbicncforum.hu/uploaded_images/2018/09/tn_ujfxisuqiyky7ffx9pxs_5949.jpg) (https://hobbicncforum.hu/uploaded_images/2018/09/ujfxisuqiyky7ffx9pxs_5949.jpg)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2018 szeptember 14, 22:05
Írta: 000000000 Dátum 2018 szeptember 14, 22:05
Az internet tele van dezinformációval, virtuális idétlenséggel, hazugsággal, mindent elfedő csicsával, amiknek a tényekhez, valósághoz semmi köze. Ennek lettél az áldozata (elhitted, amit látsz), mert a mellékelt kapcsolás működésképtelen számos ok miatt.
Elvi hibáktól hemzsegő dolgokat nem kell kipróbálni, elég ha tudjuk, mi lenne a jó megoldás, mi a működési alapja egy 555-ös IC-nek, mi a helyes lábkiosztása. Hiszen ezen a kapcsolási rajzon már az IC tápfeszültség bekötése se stimmel, így step jelek helyett inkább füst jeleket fog ez küldeni.
Elvi hibáktól hemzsegő dolgokat nem kell kipróbálni, elég ha tudjuk, mi lenne a jó megoldás, mi a működési alapja egy 555-ös IC-nek, mi a helyes lábkiosztása. Hiszen ezen a kapcsolási rajzon már az IC tápfeszültség bekötése se stimmel, így step jelek helyett inkább füst jeleket fog ez küldeni.
Cím: Re:Léptetőmotor
Írta: GG Dátum 2018 szeptember 14, 22:19
Írta: GG Dátum 2018 szeptember 14, 22:19
"This is a bogus circuit. The TE555-1 is not a 555 timer chip, It is a MCU prototype bipolar stepper motor controller with totally different pin assignments, and is also unavailable. This circuit does not belong on a 555 circuits book or page, or anything else for that matter, because it cannot be found."
Udv, G
Udv, G
Cím: Re:Léptetőmotor
Írta: 2am4nwzib Dátum 2018 szeptember 14, 22:39
Írta: 2am4nwzib Dátum 2018 szeptember 14, 22:39
Nem lep meg .......szomorú hogy igy van ez.
Köszi
Köszi
Cím: Re:Léptetőmotor
Írta: kaqkk007 Dátum 2018 szeptember 15, 06:04
Írta: kaqkk007 Dátum 2018 szeptember 15, 06:04
A TL 555 nem az lm 555 időzitő hanem egy léptető meghajtó (de szinte beszerezhetetlen nálunk)
Cím: Re:Léptetőmotor
Írta: simarex Dátum 2018 szeptember 15, 08:40
Írta: simarex Dátum 2018 szeptember 15, 08:40
Azért ha kiadnak egy könyvet annak azért szokott lenni valóságalapja főleg ha az műszaki könyv.
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2018 szeptember 15, 08:44
Írta: Rabb Ferenc Dátum 2018 szeptember 15, 08:44
Adatlapot tudnál linkelni róla?
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2018 szeptember 15, 08:47
Írta: Rabb Ferenc Dátum 2018 szeptember 15, 08:47
Ennyire azért ne legyél optimista! A műszaki könyvek íróit is oldalra fizetik...
Ma már szinte sehol nem találsz olyat, hogy - Lektorálta: XY
Ma már szinte sehol nem találsz olyat, hogy - Lektorálta: XY
Cím: Re:Léptetőmotor
Írta: simarex Dátum 2018 szeptember 15, 09:01
Írta: simarex Dátum 2018 szeptember 15, 09:01
555 (http://www.ti.com/lit/ds/symlink/tlc555.pdf)
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2018 szeptember 15, 14:36
Írta: Rabb Ferenc Dátum 2018 szeptember 15, 14:36
Köszi, de ez a mezei 555 egyik változata és még véletlenül sem a @kaqukk007 által említett léptető vezérlő
Cím: Re:Léptetőmotor
Írta: kaqkk007 Dátum 2018 szeptember 15, 15:30
Írta: kaqkk007 Dátum 2018 szeptember 15, 15:30
Sajnos az is megtalálhatatlan ...Szerintem kár is foglalkozni vele
Cím: Re:Léptetőmotor
Írta: Dakota25 Dátum 2018 szeptember 15, 15:51
Írta: Dakota25 Dátum 2018 szeptember 15, 15:51
...ez egy 12F629-es PIC, amit ez a cég (vagy személy) felkonfigurál különböző funkciókra és elnevez -ki tudja miért- 555-1, 555-2, 555-3, stb. névre.
Erről az oldalról ki lehet silabizálni. Az 555-5-nél elfeledték lekaparni a rajzról a PIC számát.
Szerintem...
oldal (http://www.talkingelectronics.com/projects/50%20-%20555%20Circuits/50%20-%20555%20Circuits.html#61)
Erről az oldalról ki lehet silabizálni. Az 555-5-nél elfeledték lekaparni a rajzról a PIC számát.
Szerintem...
oldal (http://www.talkingelectronics.com/projects/50%20-%20555%20Circuits/50%20-%20555%20Circuits.html#61)
Cím: Re:Léptetőmotor
Írta: kaqkk007 Dátum 2018 szeptember 15, 16:34
Írta: kaqkk007 Dátum 2018 szeptember 15, 16:34
Így már teljesen érthető miért nem lehet találni róla semmit ....
Cím: Re:Léptetőmotor
Írta: kaqkk007 Dátum 2018 szeptember 15, 17:07
Írta: kaqkk007 Dátum 2018 szeptember 15, 17:07
Ha gondolod és ki akarod próbálni megírom a programját (és beégetem a picbe) beszéljük meg privátban ...
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2018 szeptember 15, 18:40
Írta: Rabb Ferenc Dátum 2018 szeptember 15, 18:40
Köszönöm, így már érthető. Én csak arra voltam kíváncsi, hogy ez mennyire 555.
Pontosan annyira mint ahogy Tibor mondta. Semennyire. Akár kisnyúlnak is nevezhette volna...
Pontosan annyira mint ahogy Tibor mondta. Semennyire. Akár kisnyúlnak is nevezhette volna...
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2018 szeptember 15, 18:59
Írta: ANTAL GÁBOR Dátum 2018 szeptember 15, 18:59
Öntsünk tiszta vizet a pohárba !! Van egy TE555 ös Ic ami léptető driver . Hogy hogyan jött létre az más kérdés lehet akár egy felprogramozott PIC is .
És vannak a köznapi ( mezei mint az egér ) 555 ök . Azok timerek . Hogy miért adták a léptető vezérlőnek ugyanazt a számhármast(555) az más kérdés . DE a betűben eltérés mutatkozik. Vagyis más a kód ... ( a csapba rosszni ill a rosszba csapni esete )
Sokan benézték , kár kozmetikázni . A google választ ad mindenre ( tessék beírni hogy TE 555 !!!! [#kacsint][#kacsint] és kitisztul minden
És vannak a köznapi ( mezei mint az egér ) 555 ök . Azok timerek . Hogy miért adták a léptető vezérlőnek ugyanazt a számhármast(555) az más kérdés . DE a betűben eltérés mutatkozik. Vagyis más a kód ... ( a csapba rosszni ill a rosszba csapni esete )
Sokan benézték , kár kozmetikázni . A google választ ad mindenre ( tessék beírni hogy TE 555 !!!! [#kacsint][#kacsint] és kitisztul minden
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2018 szeptember 15, 20:47
Írta: Rabb Ferenc Dátum 2018 szeptember 15, 20:47
Hát ez az! Ha a világon bárhol azt mondod, hogy 555-ös IC, akkor mindenki a mezei timerre gondol - legyen az LM, NE, TL stb.
És erről az IC-ről szól az egész könyv 50 kapcsolásából 45. Aztán a szerző gondolt egy merészet és nagyot, és innentől ugyanennek nevezett egy felprogramozott PIC-et is. Na ez az átverés.
Szerintem az 555 "védjegy" és mindenütt a világon ugyanazt jelenti, a mezei "egér" timert. (kivéve persze a buzi amerikai filmek telefonszámainak első három számjegyét)
Tudom, az okos(kodó) Google majd megmondja a frankót...
És erről az IC-ről szól az egész könyv 50 kapcsolásából 45. Aztán a szerző gondolt egy merészet és nagyot, és innentől ugyanennek nevezett egy felprogramozott PIC-et is. Na ez az átverés.
Szerintem az 555 "védjegy" és mindenütt a világon ugyanazt jelenti, a mezei "egér" timert. (kivéve persze a buzi amerikai filmek telefonszámainak első három számjegyét)
Tudom, az okos(kodó) Google majd megmondja a frankót...
Cím: Re:Léptetőmotor
Írta: Dakota25 Dátum 2018 szeptember 15, 21:55
Írta: Dakota25 Dátum 2018 szeptember 15, 21:55
Nem olvastam a könyvet, csak a weblapot nézegettem meg, de szemmel láthatóan van valami alapja a névadásnak.
A listázott implementációkban egy "mezei" 555 van a kapcsolások elején, és különböző "végfokok" vannak ráaggatva.
Gondolom, a PIC "eleje" úgy viselkedik, mint az 555, a "vége" pedig az adott alkalmazásnak megfelelően van kialakítva.
Persze mindez programból, a PIC lehetőségeit kiaknázva.
Egy -amúgy rettentő jól használható- kis IC továbbgondolása.
Nincs ezzel semmi baj.
Szerintem...
A listázott implementációkban egy "mezei" 555 van a kapcsolások elején, és különböző "végfokok" vannak ráaggatva.
Gondolom, a PIC "eleje" úgy viselkedik, mint az 555, a "vége" pedig az adott alkalmazásnak megfelelően van kialakítva.
Persze mindez programból, a PIC lehetőségeit kiaknázva.
Egy -amúgy rettentő jól használható- kis IC továbbgondolása.
Nincs ezzel semmi baj.
Szerintem...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2018 szeptember 16, 07:49
Írta: 000000000 Dátum 2018 szeptember 16, 07:49
[#eljen]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2018 szeptember 16, 08:19
Írta: 000000000 Dátum 2018 szeptember 16, 08:19
Te nem tiszta vizet öntöttél a pohárba, hanem fordítva, zavarosat és csak kavarsz itt össze-vissza.
"Van egy TE555 ös Ic"
NINCS ilyen IC, ezt Dakota25 is világosan leírta, hiszen ez valójában 12F629-es PIC. Az egy sunyi, megtévesztő, és szerintem tilos dolog is, hogy valaki egy áramkör eredeti nevét, típusát eltávolítja, és ráhamisít egy olyan nevet, alkatrész kódot, amiben szerepel az 555 (és előtte még két betű "TE").
Ahogyan Ferenc írta, 1971 óta az elektronika világában az 555 egy fogalom, és minden szakember a klasszikus timer IC-t érti alatta, az előtte és utána lévő betűk csak gyártói, minőségi különbségekre utalnak, hiszen van ugyebár LM555, NE555, SE555, és még ki tudja hányféle. Ráadásul ez egy 555 timer IC kapcsolási rajz gyűjtemény könyvben történik, és egy olyan kapcsolási rajzon, aminek a felső részén az "555-TIMER-CIRCUITS.COM" felirat is szerepel.
Kár ezt a témát tovább ragozni, agyrém az egész, ahogyan legelőször írtam, hiszen a fentiek kapcsán, és azzal a ténnyel, hogy a PIC +- lába is éppen fordított, már rengeteg bosszúságot okozhat a szerencsétlen utánépítőknek, akik a rajz alapján jogosan egy 555 IC-t kötnek be ide. Ez az egész egy védhetetlen, műszaki emberhez méltalan dolog.
"Van egy TE555 ös Ic"
NINCS ilyen IC, ezt Dakota25 is világosan leírta, hiszen ez valójában 12F629-es PIC. Az egy sunyi, megtévesztő, és szerintem tilos dolog is, hogy valaki egy áramkör eredeti nevét, típusát eltávolítja, és ráhamisít egy olyan nevet, alkatrész kódot, amiben szerepel az 555 (és előtte még két betű "TE").
Ahogyan Ferenc írta, 1971 óta az elektronika világában az 555 egy fogalom, és minden szakember a klasszikus timer IC-t érti alatta, az előtte és utána lévő betűk csak gyártói, minőségi különbségekre utalnak, hiszen van ugyebár LM555, NE555, SE555, és még ki tudja hányféle. Ráadásul ez egy 555 timer IC kapcsolási rajz gyűjtemény könyvben történik, és egy olyan kapcsolási rajzon, aminek a felső részén az "555-TIMER-CIRCUITS.COM" felirat is szerepel.
Kár ezt a témát tovább ragozni, agyrém az egész, ahogyan legelőször írtam, hiszen a fentiek kapcsán, és azzal a ténnyel, hogy a PIC +- lába is éppen fordított, már rengeteg bosszúságot okozhat a szerencsétlen utánépítőknek, akik a rajz alapján jogosan egy 555 IC-t kötnek be ide. Ez az egész egy védhetetlen, műszaki emberhez méltalan dolog.
Cím: Re:Léptetőmotor
Írta: Dakota25 Dátum 2018 szeptember 16, 09:44
Írta: Dakota25 Dátum 2018 szeptember 16, 09:44
Nem! Dakota25 nem írt le semmi ilyesmit. (Emlékeznék rá.)
Sőt! VAN ilyen IC. Valaki elhelyezte saját szellemi termékét egy erre szolgáló hordozóban, a keletkező -minőségében új- terméket pedig elnevezte:
Talking Electronics TE555-1, -2, -stb. A termék megrendelhető.
A publikált kapcsolásokban egyértelműen jelzik, hogy:
"This circuit uses the latest TE555-1 STEPPER MOTOR SPEED CONTROLLER chip from Talking Electronics. It is available for $2.50..."
Részemről kiszálltam.
Sőt! VAN ilyen IC. Valaki elhelyezte saját szellemi termékét egy erre szolgáló hordozóban, a keletkező -minőségében új- terméket pedig elnevezte:
Talking Electronics TE555-1, -2, -stb. A termék megrendelhető.
A publikált kapcsolásokban egyértelműen jelzik, hogy:
"This circuit uses the latest TE555-1 STEPPER MOTOR SPEED CONTROLLER chip from Talking Electronics. It is available for $2.50..."
Részemről kiszálltam.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 szeptember 16, 09:48
Írta: PSoft Dátum 2018 szeptember 16, 09:48
Mint már annyiszor, megint kezd kialakulni a...jellemrajz.:(
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2018 szeptember 16, 10:47
Írta: 000000000 Dátum 2018 szeptember 16, 10:47
Ebben egyetértünk, egész szépen alakul a te jellemrajzod is.[#nyes]
Cím: Re:Léptetőmotor
Írta: gaben Dátum 2018 szeptember 16, 10:49
Írta: gaben Dátum 2018 szeptember 16, 10:49
Közben (Robsy segítségével) sikerült megtalálni a nekem kellő alkatrészt ami szükséges a feladatomhoz:MPG kézi jeladó (inkrementális enkóder) (https://variometrum.hu/Kezikerek_MPG_100ppr_5V?search=MPG&description=true)
Ez sokkal jobb megoldás, mint a potméter, mert csak akkor és addig megy majd a léptető amíg tekerem és ez a lényeg.
köszi, Gábor [#wave]
Ez sokkal jobb megoldás, mint a potméter, mert csak akkor és addig megy majd a léptető amíg tekerem és ez a lényeg.
köszi, Gábor [#wave]
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2018 szeptember 16, 11:07
Írta: D.Laci Dátum 2018 szeptember 16, 11:07
Olcsóbb ha veszel pár ezerért egy kis DC szervó motort encoderrel.
Cím: Re:Léptetőmotor
Írta: Devecz Miklós Dátum 2018 szeptember 16, 11:07
Írta: Devecz Miklós Dátum 2018 szeptember 16, 11:07
Ez is egy megoldás a problémádra:
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2018 szeptember 16, 11:23
Írta: 000000000 Dátum 2018 szeptember 16, 11:23
1. "VAN ilyen IC"
Meggyőzhető vagyok a műszaki tények alapján, így kérnénk "TE555-1" névvel egy PDF adatlapot róla. Előre megsúgom, nem fogsz találni (hisz már ez kiderült itt), de azért várjuk.
2. "szemmel láthatóan van valami alapja a névadásnak"
Hacsakúgynem.[#csodalk]
Szemmel láthatóan formailag 2 nyolclábú DIP tokos IC messziről nézve külalakilag nagyjából azonos, aztán ha elovassuk mi van ráírva, akkor derül ki, valójában tartalmilag is azonosak-e. Nyilván a "beltartalom" a legfontosabb, hiszen több ezer egészen más belső felépítésű IC típus létezik, annak ellenére, hogy szemre mindnek 8 lába van.
3. Most őszintén, azt gondolod rólam (meg sok száz emberről a külföldi comment linkek alapján), ha ez a szerző jó ember egy olyan kapcsolási rajzot közöl, amin meghagyja az eredeti alkatrész típus feliratát (mint ahogyan az kötelessége, és elvárható), azaz nem megtévesztést eszközöl, akkor én egy büdös szóval is kritizálom szakmailag az eredeti #5847 bejegyzést szakmailag?
4. Aztán egészen más kérdés az is, hogy ez a PIC-es "csoda" kapcsolás micsoda is tulajdonkképpen [#conf], mert hogy azzal a négy darab BC547-es levegőbe lógó open kollektoros A, B, C, D kimenettel közvetlenül bajosan lehetne egy léptető motort szakszerűen működtetni, az is biztos.
5. Épp elég baj a mai világgal, hogy szinte minden a valóság, a tények kifordításáról, megtévesztéséről, félrevezetésről szól. Szerintem sokkal jobb, és szebb lenne a világ, ha legalább a műszaki életben egy magát műszaki fórumnak nevező oldalon CSAK A VALÓSÁG számítana.
Meggyőzhető vagyok a műszaki tények alapján, így kérnénk "TE555-1" névvel egy PDF adatlapot róla. Előre megsúgom, nem fogsz találni (hisz már ez kiderült itt), de azért várjuk.
2. "szemmel láthatóan van valami alapja a névadásnak"
Hacsakúgynem.[#csodalk]
Szemmel láthatóan formailag 2 nyolclábú DIP tokos IC messziről nézve külalakilag nagyjából azonos, aztán ha elovassuk mi van ráírva, akkor derül ki, valójában tartalmilag is azonosak-e. Nyilván a "beltartalom" a legfontosabb, hiszen több ezer egészen más belső felépítésű IC típus létezik, annak ellenére, hogy szemre mindnek 8 lába van.
3. Most őszintén, azt gondolod rólam (meg sok száz emberről a külföldi comment linkek alapján), ha ez a szerző jó ember egy olyan kapcsolási rajzot közöl, amin meghagyja az eredeti alkatrész típus feliratát (mint ahogyan az kötelessége, és elvárható), azaz nem megtévesztést eszközöl, akkor én egy büdös szóval is kritizálom szakmailag az eredeti #5847 bejegyzést szakmailag?
4. Aztán egészen más kérdés az is, hogy ez a PIC-es "csoda" kapcsolás micsoda is tulajdonkképpen [#conf], mert hogy azzal a négy darab BC547-es levegőbe lógó open kollektoros A, B, C, D kimenettel közvetlenül bajosan lehetne egy léptető motort szakszerűen működtetni, az is biztos.
5. Épp elég baj a mai világgal, hogy szinte minden a valóság, a tények kifordításáról, megtévesztéséről, félrevezetésről szól. Szerintem sokkal jobb, és szebb lenne a világ, ha legalább a műszaki életben egy magát műszaki fórumnak nevező oldalon CSAK A VALÓSÁG számítana.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2018 szeptember 16, 11:33
Írta: 000000000 Dátum 2018 szeptember 16, 11:33
Köszi Gábor!
Örülök, hogy segíthettem a feladatodnál ezzel az encoderes megoldási lehetőséggel. A konkrét típusát viszont nem én javasoltam, nyilván "véletlenül" ez tetszik Neked, vagy már vettél ilyet elég drágán, és ott van a polcodon, hiszen sokkal olcsóbb hobbysta encoder megoldások is léteznek, ahogyan D.Laci is írta.
Örülök, hogy segíthettem a feladatodnál ezzel az encoderes megoldási lehetőséggel. A konkrét típusát viszont nem én javasoltam, nyilván "véletlenül" ez tetszik Neked, vagy már vettél ilyet elég drágán, és ott van a polcodon, hiszen sokkal olcsóbb hobbysta encoder megoldások is léteznek, ahogyan D.Laci is írta.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 szeptember 16, 11:50
Írta: PSoft Dátum 2018 szeptember 16, 11:50
Ahogy én látom...
Csípőből tüzeltél a TE 555-1 Ic-re.
Úgy hogy a jelek szerint nem vetted a fáradtságot, hogy utána nézz a létezésének.
Amikor finoman jelzi valaki hogy melléfogtál, van, létezik az Ic...
Nem mondod hogy igen, figyelmetlen voltam, vagy bármi mást, hanem....
Próbálod az általad kevert rosszt, másra/másokra kenni.
Én, a jellemalakulás megemlítésekor...erre gondoltam.
És, legyen itt egy idézet Tőled...
"Ez az egész egy védhetetlen, műszaki emberhez méltatlan dolog."
Van úgy, hogy a "fagyi visszanyal".
Csípőből tüzeltél a TE 555-1 Ic-re.
Úgy hogy a jelek szerint nem vetted a fáradtságot, hogy utána nézz a létezésének.
Amikor finoman jelzi valaki hogy melléfogtál, van, létezik az Ic...
Nem mondod hogy igen, figyelmetlen voltam, vagy bármi mást, hanem....
Próbálod az általad kevert rosszt, másra/másokra kenni.
Én, a jellemalakulás megemlítésekor...erre gondoltam.
És, legyen itt egy idézet Tőled...
"Ez az egész egy védhetetlen, műszaki emberhez méltatlan dolog."
Van úgy, hogy a "fagyi visszanyal".
Cím: Re:Léptetőmotor
Írta: MoparMan Dátum 2018 szeptember 16, 11:56
Írta: MoparMan Dátum 2018 szeptember 16, 11:56
[#offtopic]
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2018 szeptember 16, 13:06
Írta: PSoft Dátum 2018 szeptember 16, 13:06
Ok!
Köszönöm.
Köszönöm.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2018 szeptember 16, 13:45
Írta: Szalai György Dátum 2018 szeptember 16, 13:45
Attól hogy egy 12F629-be (http://www.talkingelectronics.com/projects/Stepper%20Motor%20Controller/images/StepperMotorCct.gif) írnak egy kezdetleges sorrendvezérlő kódot, még nem lesz léptetőmotor meghajtó.
Hiába írom rá, hogy 555-1, (https://i.stack.imgur.com/VqSCm.gif) még nem lesz 555 sem.
Ez az elnevezés csak egy alantas haszonszerzési vágyból született reklámötlet.
A magam részéről szégyenletesnek és gyalázatosnak látom.
Hiába írom rá, hogy 555-1, (https://i.stack.imgur.com/VqSCm.gif) még nem lesz 555 sem.
Ez az elnevezés csak egy alantas haszonszerzési vágyból született reklámötlet.
A magam részéről szégyenletesnek és gyalázatosnak látom.
Cím: Re:Léptetőmotor
Írta: mex Dátum 2018 szeptember 16, 13:50
Írta: mex Dátum 2018 szeptember 16, 13:50
Azért ebben van egy kis csúsztatás.
Szóval TE 555-1
A magam részéről így látom korrektnek...
Szóval TE 555-1
A magam részéről így látom korrektnek...
Cím: Re:Léptetőmotor
Írta: MoparMan Dátum 2018 szeptember 16, 14:17
Írta: MoparMan Dátum 2018 szeptember 16, 14:17
nem csak neked szólt, ezért nem válaszként írtam.
Cím: Re:Léptetőmotor
Írta: gaben Dátum 2018 szeptember 16, 14:56
Írta: gaben Dátum 2018 szeptember 16, 14:56
Köszi az ötleteket Miklós és Laci, de már megvan a tökéletes cucc a feladatra.
Sajnos nem értek annyira az elektronikához, mint kellene, sosem foglalkoztam ilyen berendezések építésével.
Jelen pillanatban a minél egyszerűbb, mondhatnám "plug&play" eszközök jöhetnek számításba, mert sem időm, sem energiám nincs a többi tanulására.
Szeretném ha az év végére működne a CNC gépem és még rengeteg egyéb feladat várat magára amit el kell végeznem.
Az arduinos verzió még érdekelne is, és van is otthon tanulókészletem, de tél óta elő sem vettem.
Na majd egyszer biztos minden olyan projektre lesz időm, ami a fejemben van. :)
Sajnos nem értek annyira az elektronikához, mint kellene, sosem foglalkoztam ilyen berendezések építésével.
Jelen pillanatban a minél egyszerűbb, mondhatnám "plug&play" eszközök jöhetnek számításba, mert sem időm, sem energiám nincs a többi tanulására.
Szeretném ha az év végére működne a CNC gépem és még rengeteg egyéb feladat várat magára amit el kell végeznem.
Az arduinos verzió még érdekelne is, és van is otthon tanulókészletem, de tél óta elő sem vettem.
Na majd egyszer biztos minden olyan projektre lesz időm, ami a fejemben van. :)
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2018 szeptember 21, 09:52
Írta: zozo Dátum 2018 szeptember 21, 09:52
Egy 4 Nm-es mocit raktam egy emelő szerkezetbe. Vezérlője az eredeti enkóderes, hozzávaló.
Az egyik cél a csendes üzemelés is lenne, ezért gumiágyban vannak a motor csavarok, a kuplung műanyag betétes. Orsót hajt.
Próbáltam az összes mikrolépést és ehhez megfelelő meghajtó frekit, de a motortesten érezhető rezgés/zaj nem sokat változik. 10.000 step/rev körül a legcsendesebb.
Mit lehetne esetleg még tenni a csendesítés érdekében, na persze a szervóra való cserélés nélkül :)
Egyik további ötletem, hogy az orsón a réz anyát pl. POM-ra cserélem, mivel érezhető, hogy az orsó viszi a hangot a további fémelemekre. Tartok tőle, ez sem sokat segítene, a műanyag is átadná az alacsonyfrekis rezgést...
Sajna fogazott szíjas hajtásnak nincs hely, mindenképp direktben kell hajtani az orsót.
Az egyik cél a csendes üzemelés is lenne, ezért gumiágyban vannak a motor csavarok, a kuplung műanyag betétes. Orsót hajt.
Próbáltam az összes mikrolépést és ehhez megfelelő meghajtó frekit, de a motortesten érezhető rezgés/zaj nem sokat változik. 10.000 step/rev körül a legcsendesebb.
Mit lehetne esetleg még tenni a csendesítés érdekében, na persze a szervóra való cserélés nélkül :)
Egyik további ötletem, hogy az orsón a réz anyát pl. POM-ra cserélem, mivel érezhető, hogy az orsó viszi a hangot a további fémelemekre. Tartok tőle, ez sem sokat segítene, a műanyag is átadná az alacsonyfrekis rezgést...
Sajna fogazott szíjas hajtásnak nincs hely, mindenképp direktben kell hajtani az orsót.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2018 szeptember 21, 17:58
Írta: Szalai György Dátum 2018 szeptember 21, 17:58
Tehetetlenségi csillapító? Esetleg a kuplungra, vagy helyette. (https://www.google.hu/search?q=inertia+damper&newwindow=1&source=lnms&tbm=isch&sa=X&ved=0ahUKEwiE4_H5uczdAhVilIsKHfU0BEEQ_AUICigB&biw=1280&bih=709#imgrc=_)
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2018 szeptember 21, 21:31
Írta: zozo Dátum 2018 szeptember 21, 21:31
Köszi! -ezen érdemes elgondolkodni....
Az orsóra tudnám esetleg tenni, közvetlen a kuplung után, mert a kuplung egy lyukban van. Végülis ott is ugyanolyan jó lehet. A gyorsításokat meg visszább vehetem, nincs jelentősége.
Az orsóra tudnám esetleg tenni, közvetlen a kuplung után, mert a kuplung egy lyukban van. Végülis ott is ugyanolyan jó lehet. A gyorsításokat meg visszább vehetem, nincs jelentősége.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2018 szeptember 23, 12:24
Írta: Szalai György Dátum 2018 szeptember 23, 12:24
Az Oriental szerint a rezgések csökkentése érdekében a tehetetlen terhelésnek fel kell vennie a motor által szolgáltatott nyomaték 30-70% -át.
Túlzottan nagy motor nem hatékony és túllendülésből származó rezgéseket kelt, mert alul van terhelve.
A terhelés J és a rotor J aránya 1: 1 és 10: 1 között legyen, rövidebb, gyorsabb mozgások esetén a jó arány 1:1-3:1 közötti.
Lehet, hogy a vezérlés hangolásával is csökkentheted a rezgéseket.
Azt írják, hogy legtöbb motor rezonanciapontja 60 fordulat/perc, 200Hz körül van.
Kerülni kell a rezonanciapont környékét.
Túlzottan nagy motor nem hatékony és túllendülésből származó rezgéseket kelt, mert alul van terhelve.
A terhelés J és a rotor J aránya 1: 1 és 10: 1 között legyen, rövidebb, gyorsabb mozgások esetén a jó arány 1:1-3:1 közötti.
Lehet, hogy a vezérlés hangolásával is csökkentheted a rezgéseket.
Azt írják, hogy legtöbb motor rezonanciapontja 60 fordulat/perc, 200Hz körül van.
Kerülni kell a rezonanciapont környékét.
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2018 szeptember 23, 14:19
Írta: zozo Dátum 2018 szeptember 23, 14:19
Köszi Gyuri.
A fordulat amúgy 300-500 rpm között van üzemi körülmények közt, itt már illik/illene szépen futnia.
A fordulat amúgy 300-500 rpm között van üzemi körülmények közt, itt már illik/illene szépen futnia.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2018 szeptember 23, 18:04
Írta: svejk Dátum 2018 szeptember 23, 18:04
No ha már szóba jött az Orientál, akkor én meg a napokban találtam egy régi adatlapjukon a következő képletet, mellyel számolható a start frekvencia csökkenése a terhelés tehetetlenségi nyomatékának függvényében.
Talán úgy egy éve sok szó esett erről a támáról Robsy gyors, léptetős hajtásai kapcsán.
(https://hobbicncforum.hu/uploaded_images/2018/09/tn_27a30gw00pqg283ftdsy8_66.jpg) (https://hobbicncforum.hu/uploaded_images/2018/09/27a30gw00pqg283ftdsy8_66.jpg)
Talán úgy egy éve sok szó esett erről a támáról Robsy gyors, léptetős hajtásai kapcsán.
(https://hobbicncforum.hu/uploaded_images/2018/09/tn_27a30gw00pqg283ftdsy8_66.jpg) (https://hobbicncforum.hu/uploaded_images/2018/09/27a30gw00pqg283ftdsy8_66.jpg)
Cím: Re:Léptetőmotor
Írta: gaben Dátum 2018 november 13, 15:24
Írta: gaben Dátum 2018 november 13, 15:24
Sziasztok,
a léptetőmotorok ideális fordulatszámáról olvasgatok a neten, de eléggé tág határok között vannak erről leírások.
Van ahol 100-300ford/perc, van ahol 5-600ford/perc környékére írják az ideálist.
Nem szeretném ha a gépem lépést tévesztene a megmunkálás közben, éppen ezért még időben szeretném jól belőni azt a max. fordulatszámot (illetve az áttételek függvényében a megmunkálási m/min sebességet), ahol biztonsággal üzemeltethetem.
Tehát a kérdés, mekkora fordulatszámmal kalkuláljak?
köszi, Gábor
a léptetőmotorok ideális fordulatszámáról olvasgatok a neten, de eléggé tág határok között vannak erről leírások.
Van ahol 100-300ford/perc, van ahol 5-600ford/perc környékére írják az ideálist.
Nem szeretném ha a gépem lépést tévesztene a megmunkálás közben, éppen ezért még időben szeretném jól belőni azt a max. fordulatszámot (illetve az áttételek függvényében a megmunkálási m/min sebességet), ahol biztonsággal üzemeltethetem.
Tehát a kérdés, mekkora fordulatszámmal kalkuláljak?
köszi, Gábor
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2018 november 13, 15:33
Írta: Miki2 Dátum 2018 november 13, 15:33
Nagyon sok múlik az alkalmazott feszültségen.
Tapasztalatom szerint érdemes legalább 70-80 V-os meghajtót alkalmazni.
Nálam a 3.1 Nm-es motorok 70 V-os meghajtóval mennek 68 V üresjárati feszültségű tápegységről.
A toroid 48 V-os szekunder feszültségű.
Ez így működik már vagy 10 éve, lépésvesztés csak az én hibám eredményeként fordult elő.
Tapasztalatom szerint érdemes legalább 70-80 V-os meghajtót alkalmazni.
Nálam a 3.1 Nm-es motorok 70 V-os meghajtóval mennek 68 V üresjárati feszültségű tápegységről.
A toroid 48 V-os szekunder feszültségű.
Ez így működik már vagy 10 éve, lépésvesztés csak az én hibám eredményeként fordult elő.
Cím: Re:Léptetőmotor
Írta: gaben Dátum 2018 november 14, 08:16
Írta: gaben Dátum 2018 november 14, 08:16
Köszönöm, de a kérdésem úgy általában a léptetőmotorok fordulatszámára irányult.
Tudom, hogy sok múlik a feszültségen, de nekem egy másik tartományban működő rendszerem van, ezen már nem tudok változtatni.
Klavio-s szakemberektől kaptam választ.
üdv, Gábor
Tudom, hogy sok múlik a feszültségen, de nekem egy másik tartományban működő rendszerem van, ezen már nem tudok változtatni.
Klavio-s szakemberektől kaptam választ.
üdv, Gábor
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2018 november 14, 08:23
Írta: svejk Dátum 2018 november 14, 08:23
No ezt már a golyósorsó és motor -esetleg áttétel- választás esetén be kellett volna lőnöd.
Most már csak az marad hátra, hogy megkeresed a mechanikád határát és egy biztonsági tényezővel leosztva határozod meg a max. sebességet és gyorsulást.
Most már csak az marad hátra, hogy megkeresed a mechanikád határát és egy biztonsági tényezővel leosztva határozod meg a max. sebességet és gyorsulást.
Cím: Re:Léptetőmotor
Írta: ab Dátum 2018 november 14, 08:24
Írta: ab Dátum 2018 november 14, 08:24
Powerbelt-nel is segitenek, ha kerdezel. Ott kaphato motoroknal 300f/p van feltuntetve. Tibor (Robsy) 600f/p-ben szokta javasolni a maximumot. Ez egyebkent meg 6Nm-es motornal is bevalt, persze attetelen keresztul hajtva az adott orsot.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2018 november 14, 08:26
Írta: svejk Dátum 2018 november 14, 08:26
Általában 300-ig nincs baj, felette meg segít az ima. :)
Te UCCNC-vel fogod használni, az szerencsére jobban kézben tartja a gyorsulásokat mint a Mach3.
Te UCCNC-vel fogod használni, az szerencsére jobban kézben tartja a gyorsulásokat mint a Mach3.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2018 november 14, 08:27
Írta: svejk Dátum 2018 november 14, 08:27
Egyébként meg tekintsd meg a motorod nyomaték-fordulat grafikonját és rögtön látni fogod, hogy kb. mit várhatsz.
Cím: Re:Léptetőmotor
Írta: gaben Dátum 2018 november 14, 09:21
Írta: gaben Dátum 2018 november 14, 09:21
Belőttem én ezt már régen, ez alapján terveztem a gépet és a mechanikát is.
A max. és biztonságos fordulatszámra azért van szükségem, hogy véletlenül se fussak bele lépésvesztésbe.
A max. és biztonságos fordulatszámra azért van szükségem, hogy véletlenül se fussak bele lépésvesztésbe.
Cím: Re:Léptetőmotor
Írta: gaben Dátum 2018 november 14, 09:23
Írta: gaben Dátum 2018 november 14, 09:23
Ismerem a Powerbelt-es szakikat is, szoktam tőlük is szakmai tanácsot kérni.
De gondoltam itt előbb kapok választ, végül is ez a HobbyCNC fórum. ;)
Itt azért mégiscsak gyakorlati szakemberek lézengenek. [#awink]
De gondoltam itt előbb kapok választ, végül is ez a HobbyCNC fórum. ;)
Itt azért mégiscsak gyakorlati szakemberek lézengenek. [#awink]
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2018 november 14, 10:59
Írta: Szalai György Dátum 2018 november 14, 10:59
Itt egy kis "segítség" hogy még annyira sem legyen egyszerű. (https://www.orientalmotor.com/stepper-motors/technology/speed-torque-curves-for-stepper-motors.html)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2018 november 14, 11:34
Írta: 000000000 Dátum 2018 november 14, 11:34
Jó lenne, ha a konkrét hajtástechnikai fő adatokat is megírnád (motor tartónyomaték, áttétel, orsó menetemelkedés), enélkül csak általános "ökölszabályokat" lehet mondani v. max. tekintetében.
Aztán a lépésvesztés szempontjából sokkal fontosabb a gyorsulási szakasz, amiről eddig szó se volt. Hiszen az állandó sebesség egy "mesebeli" dolog, oda el is kell jutni a CNC világában is, és ez a "rögös út" sokkal veszedelmesebbb, mint állandó sebességgel szántani a levegőt. A primitív lineáris rámpa mint tudjuk messze van az optimálistól, tehát ha olyan vezérlőd van, ami csak ezt tudja, máris érdemes sok mindent átgondolni.
Aztán a lépésvesztés szempontjából sokkal fontosabb a gyorsulási szakasz, amiről eddig szó se volt. Hiszen az állandó sebesség egy "mesebeli" dolog, oda el is kell jutni a CNC világában is, és ez a "rögös út" sokkal veszedelmesebbb, mint állandó sebességgel szántani a levegőt. A primitív lineáris rámpa mint tudjuk messze van az optimálistól, tehát ha olyan vezérlőd van, ami csak ezt tudja, máris érdemes sok mindent átgondolni.
Cím: Re:Léptetőmotor
Írta: ab Dátum 2018 november 17, 17:39
Írta: ab Dátum 2018 november 17, 17:39
Van egy régen vásárolt léptetőmotorom. Még t2cnc.hu matricás. Típusa: 34SM095-064-8W-SB14-6.4 (1.8fok, 6.4A/fázis, 2.6V). Megmértem a tekercsek ellenállását, 0.8Ohm. Elírás lehet a 6.4A/fázis, vagy ekkora különbség lenne a most listában szereplő 6.4Nm-es motor között?
(Minden méret egyezik, csak zavar ez a felirat.)
(Minden méret egyezik, csak zavar ez a felirat.)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2018 november 17, 17:52
Írta: 000000000 Dátum 2018 november 17, 17:52
Nincs itt semmi gond.
Párhuzamos tekercs bekötés esetén jó közelítéssel stimmelnek az adatok.
Párhuzamos tekercs bekötés esetén jó közelítéssel stimmelnek az adatok.
Cím: Re:Léptetőmotor
Írta: xbwtgv9j Dátum 2018 november 17, 20:21
Írta: xbwtgv9j Dátum 2018 november 17, 20:21
https://m.youtube.com/watch?v=BWtbD51z5wg
Cím: Re:Léptetőmotor
Írta: ab Dátum 2018 november 17, 20:39
Írta: ab Dátum 2018 november 17, 20:39
Sorosan, vagy párhuzamosan kötve érdemes bekötnöm a tekercseket? (Azokról a motorokról van szó, amiket meghatároztál nekem a héten.)
Két vezérlő adott már. Ezek fázisonként csúcsban tudnak 8.2A-t, így bárhogy köthetem a tekercseket. Nagy motorfordulatra nincs szükség.
Két vezérlő adott már. Ezek fázisonként csúcsban tudnak 8.2A-t, így bárhogy köthetem a tekercseket. Nagy motorfordulatra nincs szükség.
Cím: Re:Léptetőmotor
Írta: td9vdrgga Dátum 2018 december 26, 14:38
Írta: td9vdrgga Dátum 2018 december 26, 14:38
Sziasztok.
Fel tudnátok világosítani hoy az uni és a bi poláris léptetők közt mi a különbség? Mi az előnye és hátránya? Lézergépet akarok építeni gravírozáshoz..
Fel tudnátok világosítani hoy az uni és a bi poláris léptetők közt mi a különbség? Mi az előnye és hátránya? Lézergépet akarok építeni gravírozáshoz..
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2018 december 27, 10:56
Írta: dtb Dátum 2018 december 27, 10:56
Ezt a linket (http://qtp.hu/elektro/leptetomotor_mukodese.php) (is) olvasd el, nagyjából benne van minden.
Cím: Re:Léptetőmotor
Írta: td9vdrgga Dátum 2019 január 01, 11:40
Írta: td9vdrgga Dátum 2019 január 01, 11:40
Köszi a linket. Sajna nem lettem okosabb. Az unipoláris talán erősebb a több tekercs miatt és több lépést képes megtenni?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 január 01, 12:18
Írta: svejk Dátum 2019 január 01, 12:18
Akkor elégedj meg annyival, hogy itt a tengelymozgatásoknál az unipoláris felejtős, legnagyobb előnye az egyszerűbb, kevesebb félvezetőt tartalamazó meghajtó elektronika volt.
Ne erőltesd Te sem.
Ne erőltesd Te sem.
Cím: Re:Léptetőmotor
Írta: hostya Dátum 2019 január 01, 12:25
Írta: hostya Dátum 2019 január 01, 12:25
A Google a barátod...
-Keress..!
-Olvass..!
-Tanulj.!!
Ne várd a sült galambot, mert az nem tud repülni... [#integet2]
-Keress..!
-Olvass..!
-Tanulj.!!
Ne várd a sült galambot, mert az nem tud repülni... [#integet2]
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2019 január 01, 13:01
Írta: s7manbs8 Dátum 2019 január 01, 13:01
Milyen értelemben szeretnél okosabb lenni ?
Ha nem elég jó, amid van, motor hajtásnak, akkor:
Minőségben, jóságban valami hasonló a sorrend, mint az alább látható listában, lefele egyre jobb a cucc, persze a jóság is relatív milyen értelemben.
1. Régi fajta Robotron léptetőmotor
2. Unipoláris motor
3. Bipoláris motor
4. 5 fázisú léptető motort
5. DC szervó motor
6. AC szervó motor
stb. van még pár különleges kategória, meg lehet ezekről elég sokat elmélkedni.
Ha nem elég jó, amid van, motor hajtásnak, akkor:
Minőségben, jóságban valami hasonló a sorrend, mint az alább látható listában, lefele egyre jobb a cucc, persze a jóság is relatív milyen értelemben.
1. Régi fajta Robotron léptetőmotor
2. Unipoláris motor
3. Bipoláris motor
4. 5 fázisú léptető motort
5. DC szervó motor
6. AC szervó motor
stb. van még pár különleges kategória, meg lehet ezekről elég sokat elmélkedni.
Cím: Re:Léptetőmotor
Írta: fpd0kbd4 Dátum 2019 január 01, 14:49
Írta: fpd0kbd4 Dátum 2019 január 01, 14:49
Sziasztok! B.Ú.É.K.
Mivel aktív a topik lenne egy kérdésem. Egy léptecs doksijában,jól értelmezem,hogy a következő szöveg arra utal, jumperelhető step-dir üzemmódra?
1/2 CLK switch is to select pulse input mode.
.
1-pulse input mode : CW › operation command pulse input, CCW › rotation direction pulse input
([H]: CW rotation, [L]: CCW rotation)
.
2-Puls input mode : CW › CW direction rotation pulse input, CCW › CCW direction rotation pulse input
Teljes doksi (https://www.rhona.pe/uploads/archivos/20141215131325_cat-062216md5140418.pdf)
Mivel aktív a topik lenne egy kérdésem. Egy léptecs doksijában,jól értelmezem,hogy a következő szöveg arra utal, jumperelhető step-dir üzemmódra?
1/2 CLK switch is to select pulse input mode.
.
1-pulse input mode : CW › operation command pulse input, CCW › rotation direction pulse input
([H]: CW rotation, [L]: CCW rotation)
.
2-Puls input mode : CW › CW direction rotation pulse input, CCW › CCW direction rotation pulse input
Teljes doksi (https://www.rhona.pe/uploads/archivos/20141215131325_cat-062216md5140418.pdf)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 január 01, 14:57
Írta: svejk Dátum 2019 január 01, 14:57
Igen, az 1 pulse input módot kell kiválasztanod.
Cím: Re:Léptetőmotor
Írta: fpd0kbd4 Dátum 2019 január 01, 15:54
Írta: fpd0kbd4 Dátum 2019 január 01, 15:54
Köszi! Ez az év jó hírrel kezdődik.Remélem csak így tovább.
Cím: Re:Léptetőmotor
Írta: td9vdrgga Dátum 2019 január 02, 00:02
Írta: td9vdrgga Dátum 2019 január 02, 00:02
Igyekszem tanulni ahogy időm engedi. De napközben ritkán érek a gép elé. És ilyenkor este éjfél felé, már annyira nem fog az agyam. A munka és a két gyerek lefáraszt rendesen.
Reméltem hogy tudok segíteni a jó irányba elindulni. Mert ha a gép váza megvan azután már a motorokhoz kell igazodni mindenben vezérlés téren. És ha rossz típusú motort vennék és vezérlést stb dobatom a kukába. Akkor kicsit drága a hobbi.
Reméltem hogy tudok segíteni a jó irányba elindulni. Mert ha a gép váza megvan azután már a motorokhoz kell igazodni mindenben vezérlés téren. És ha rossz típusú motort vennék és vezérlést stb dobatom a kukába. Akkor kicsit drága a hobbi.
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2019 január 02, 00:28
Írta: jani300 Dátum 2019 január 02, 00:28
Szia !
Svejk meg írta a tutit !
Annyí dolgod maradt hogy megállapítsd milyen teljesítményű motorokra van szükséged .
Ha nem tudod eldönteni közölj némi infót a gép méreteiről ,várható felhasználási területéről ,ha eddig még nem tetted .
A motorok működésének megértéséről annyit írnék hogy nekem évekbe tellett míg itt olvasgatva nagyjából képbe kerültem ,és utána tudok önállóan keresni egyedül is már ha valamit nem értek .
Most néztem mikor is regisztráltam ...
A hab a tortán hogy elektronikai alapképzettségem azért megvolt ,de ez teljesen ismeretlen terület volt számomra .
Sok mindet begyűjtöttem alkatrészeket ,de ténylegesen semmit nem alkottam még a témában :(
Most tevékenységi kört kell váltanom ,talán jutok e téren is valamire ...
Svejk meg írta a tutit !
Annyí dolgod maradt hogy megállapítsd milyen teljesítményű motorokra van szükséged .
Ha nem tudod eldönteni közölj némi infót a gép méreteiről ,várható felhasználási területéről ,ha eddig még nem tetted .
A motorok működésének megértéséről annyit írnék hogy nekem évekbe tellett míg itt olvasgatva nagyjából képbe kerültem ,és utána tudok önállóan keresni egyedül is már ha valamit nem értek .
Most néztem mikor is regisztráltam ...
A hab a tortán hogy elektronikai alapképzettségem azért megvolt ,de ez teljesen ismeretlen terület volt számomra .
Sok mindet begyűjtöttem alkatrészeket ,de ténylegesen semmit nem alkottam még a témában :(
Most tevékenységi kört kell váltanom ,talán jutok e téren is valamire ...
Cím: Re:Léptetőmotor
Írta: td9vdrgga Dátum 2019 január 02, 01:43
Írta: td9vdrgga Dátum 2019 január 02, 01:43
Lézergépet akarok építeni. Az elképzelésem szerint 1.5N motorokat raknék fel. Ez már elég erős gondolom hogy egy megközelítőleg hasznos 500*500 alapterületen mozgassa a 40x40 alu gépépítő idomon a lézerfejet. a Felső sínen csakis a lézerfej fog helyet kapni. Minden egyéb elektronika a gép egyéb részén.
Elképzelésem az hogy egy dobozt fogok gyártani és abban lesz elhelyezve az összes vezérlő elektronika. A leolvadást megelőzendő aktív hűtés fog kapni.
A híd mozgatására egy két oldalon forgó motort, a lézer modul mozgatáshoz egy motort teszek.A mozgatáshoz lineáris sin rendszert fogok alkalmazni. Fogastárcsa és fogasszíj 3mm fogtávval
Hosszirányban két tengelyen fog mozogni dupla hosszú golyós hüvelykeken. Fogastárcsa és fogasszíj 3mm fogtávval.
Hobbinak szánom de ha kicsivel többért megbízhatóvá lehet tenni ami akár kisüzemi teljesítményt is tud nem bánom.
Ezen felül egy magasságálltóval is ellátom a lézer modult. Amivel a különböző vastagságú anyagokhoz tudom igazítani a fókuszpontot. De ez inkább már luxus kategória.
Elképzelésem az hogy egy dobozt fogok gyártani és abban lesz elhelyezve az összes vezérlő elektronika. A leolvadást megelőzendő aktív hűtés fog kapni.
A híd mozgatására egy két oldalon forgó motort, a lézer modul mozgatáshoz egy motort teszek.A mozgatáshoz lineáris sin rendszert fogok alkalmazni. Fogastárcsa és fogasszíj 3mm fogtávval
Hosszirányban két tengelyen fog mozogni dupla hosszú golyós hüvelykeken. Fogastárcsa és fogasszíj 3mm fogtávval.
Hobbinak szánom de ha kicsivel többért megbízhatóvá lehet tenni ami akár kisüzemi teljesítményt is tud nem bánom.
Ezen felül egy magasságálltóval is ellátom a lézer modult. Amivel a különböző vastagságú anyagokhoz tudom igazítani a fókuszpontot. De ez inkább már luxus kategória.
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2019 január 02, 03:21
Írta: jani300 Dátum 2019 január 02, 03:21
Ehhez érdemben nem tudok hozzászólni ,tanácsot adni.
De a leírtak alapján a tapasztaltabb fórumtársak már biztosan tudnak segítséget adni ,véleményt mondani .
De a leírtak alapján a tapasztaltabb fórumtársak már biztosan tudnak segítséget adni ,véleményt mondani .
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2019 január 02, 05:39
Írta: Szalai György Dátum 2019 január 02, 05:39
Nem luxus kategória a vágógáz adagolás és a füst elszívás.
(Lehet egyesített rendszerben is.)
(Lehet egyesített rendszerben is.)
Cím: Re:Léptetőmotor
Írta: td9vdrgga Dátum 2019 január 02, 11:03
Írta: td9vdrgga Dátum 2019 január 02, 11:03
A füst elszívás az nem luxus. Csak nem írtam. A vágógáz meg talán lesz. De mivelhogy nem vágási célzattal vettem meg a lézer fejet így nem lesz rá szükség. Legalábbis most.
De természetesen beszerzek majd egy kompresszort és szépen beadagolom a levegőt hogy azzal gyorsítsam és javítsam a minőséget a vágásnál.
De természetesen beszerzek majd egy kompresszort és szépen beadagolom a levegőt hogy azzal gyorsítsam és javítsam a minőséget a vágásnál.
Cím: Re:Léptetőmotor
Írta: td9vdrgga Dátum 2019 január 02, 11:20
Írta: td9vdrgga Dátum 2019 január 02, 11:20
Ez az elképzelésem nagy vonalakban. Természetesen egy biztosan fog változni az elképzelés ahogy növekszik a tudásom. Nem egy hirtelen jött ötlet volt ez már évek óta álmodozom róla. A tanácsot viszont elfogadom hogy bipoláris motorokat alkalmazzak.
Idézetet írta: ElektronMilyen értelemben szeretnél okosabb lenni ?Csak arra voltam kíváncsi hogy a bi és uni poláris motoroknak mi az előnye és hátránya egymáshoz képest. De ez már eldöntve.
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2019 január 02, 22:17
Írta: zozo Dátum 2019 január 02, 22:17
IdézFogastárcsa és fogasszíj 3mm fogtávval.
Felbontást számoltál már?
Cím: Re:Léptetőmotor
Írta: td9vdrgga Dátum 2019 január 02, 22:46
Írta: td9vdrgga Dátum 2019 január 02, 22:46
Még nem. Mivelhogy terv még a gép.De ha elárulod mit jelent a felbontás számítás máris kalkulálok.
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2019 január 02, 23:06
Írta: zozo Dátum 2019 január 02, 23:06
Nagyon off itt, törölve lesz biztosan, de röviden:
a fogazott tárcsa (fogszám * osztás) megadja egy fordulatra eső elmozdulást. Ezt elosztod a léptető mikrolépéssel és megtudod, mekkora lesz a legkisebb elmozdulás. 1/4-1/8 mikrolépésnél ne nagyon számolj kisebbel, mert nem biztos, hogy le fogja lépni.
Ez tájékoztat a várható pontosságáról (legkisebb lépésnagyságáról) a gépednek.
a fogazott tárcsa (fogszám * osztás) megadja egy fordulatra eső elmozdulást. Ezt elosztod a léptető mikrolépéssel és megtudod, mekkora lesz a legkisebb elmozdulás. 1/4-1/8 mikrolépésnél ne nagyon számolj kisebbel, mert nem biztos, hogy le fogja lépni.
Ez tájékoztat a várható pontosságáról (legkisebb lépésnagyságáról) a gépednek.
Cím: Re:Léptetőmotor
Írta: td9vdrgga Dátum 2019 január 03, 00:29
Írta: td9vdrgga Dátum 2019 január 03, 00:29
Ebbe jobban bele kell merülnöm.
Köszi a segítséget.
Köszi a segítséget.
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 január 17, 19:05
Írta: 4umhue7vh Dátum 2019 január 17, 19:05
Sziasztok! ismeri valaki ezt a léptetőmotor szettet ? A kéket ismeren én is az jól müködik, de ez 10eft-al olcsóbb, lehet hogy használhatatlan?
https://www.ebay.com/itm/EU-SHIP-NEMA34-34SSM1460-Closed-Loop-Stepper-motor-142mm-9n-m-1000-line-HBS86H/153137387524?hash=item23a7b31804:g:rOYAAOSwe91bcRER:rk:2:pf:1&frcectupt=true
https://www.ebay.com/itm/EU-SHIP-NEMA34-34SSM1460-Closed-Loop-Stepper-motor-142mm-9n-m-1000-line-HBS86H/153137387524?hash=item23a7b31804:g:rOYAAOSwe91bcRER:rk:2:pf:1&frcectupt=true
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 január 20, 14:46
Írta: 000000000 Dátum 2019 január 20, 14:46
Vannak olyan feladatok, amikor egy step/dir hajtást manuálisan, számítógépes CNC vezérlés nélkül is lehet működtetni (pl. vezérlő/mechanika/motor tesztek, kamera mozgatás, stb.). Ilyen esetekeben elég egy potméter, mint fő kezelő elem, aminek középállásában a motor fordulatszáma nulla, a két végpontban pedig +/- irányban maximális.
Ez a kis kézi vezérlő fejlesztésem TTL szintű step/dir jeleket ad ki, ezeket kell csak csatlakoztatni a hajtás bemenetekhez, és már kényelmesen forgathatjuk is tetszés szerint a motort a poti tekergetésével.
http://www.robsy.hu/te19/Robsy-manual-controller-k.jpg
Robsy kézi vezérlő demovideó. (http://www.robsy.hu/te19/Robsy-manual-controller.mpg)
Ez a kis kézi vezérlő fejlesztésem TTL szintű step/dir jeleket ad ki, ezeket kell csak csatlakoztatni a hajtás bemenetekhez, és már kényelmesen forgathatjuk is tetszés szerint a motort a poti tekergetésével.
http://www.robsy.hu/te19/Robsy-manual-controller-k.jpg
Robsy kézi vezérlő demovideó. (http://www.robsy.hu/te19/Robsy-manual-controller.mpg)
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2019 január 20, 15:19
Írta: PSoft Dátum 2019 január 20, 15:19
Tudsz ebből nyomógombos verziót is készíteni?
Két alkalmazás szerinti iránygomb, a motor addig forog amíg a gombot nyomod.
Ha elengeded a gombot, az adott pozícióban marad a hajtás.
A videó jobb oldali potija pedig, a hajtás sebessége, mint ahogy most is.
Potinál nem fordulhat elő, de a két gombos verziónál ki kellene zárni az együttnyomás hibáját.
Két alkalmazás szerinti iránygomb, a motor addig forog amíg a gombot nyomod.
Ha elengeded a gombot, az adott pozícióban marad a hajtás.
A videó jobb oldali potija pedig, a hajtás sebessége, mint ahogy most is.
Potinál nem fordulhat elő, de a két gombos verziónál ki kellene zárni az együttnyomás hibáját.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 január 20, 15:57
Írta: 000000000 Dátum 2019 január 20, 15:57
Kényelmetlenebb, macerásabb lesz a kezelés, de megoldható. Sajnos ekkor a nyomógomb használata egységugrás problémakört vet fel a start-stop fordulatszám felett.
Ugyanis nagyobb poti sebesség beállításoknál pl. start esetén lehetséges, hogy el se tud indulni a mezei léptetőmotoros hajtás, leálláskor meg túllendül a motor, és lépéstévesztések közepette akadozva fog esetleg megállni.
Ezért aztán ilyen nyomógombos esetekben be kell tenni egy automatikus gyorsulást kezelő modult is, ami "megszelidíti" a nyomógomb hirtelen motor indítási alapjelét.
A potméteres kezelésnél ugye nincsenek ilyen gondok, mert a gyakorlatban nem tudsz egységugrás jelet generálni, bármilyen gyors is a kezed.
Ugyanis nagyobb poti sebesség beállításoknál pl. start esetén lehetséges, hogy el se tud indulni a mezei léptetőmotoros hajtás, leálláskor meg túllendül a motor, és lépéstévesztések közepette akadozva fog esetleg megállni.
Ezért aztán ilyen nyomógombos esetekben be kell tenni egy automatikus gyorsulást kezelő modult is, ami "megszelidíti" a nyomógomb hirtelen motor indítási alapjelét.
A potméteres kezelésnél ugye nincsenek ilyen gondok, mert a gyakorlatban nem tudsz egységugrás jelet generálni, bármilyen gyors is a kezed.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2019 január 20, 16:05
Írta: Szalai György Dátum 2019 január 20, 16:05
Csalható lenne a dolog, ha a nyomógomb alatt nem egy záró kontaktus, hanem egy nyomó potméter funkciót megvalósító szerkezet van.
Mint pisztolyfúrógép ravasza potméter.
Mint pisztolyfúrógép ravasza potméter.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 január 20, 16:06
Írta: svejk Dátum 2019 január 20, 16:06
Okos dolog, sokszor jól jöhet. [#eljen]
Van benne valami meredekséghatároló is, hogy ha odatekered a potit nagy sebességnél, akkor se lépjen ki a motor a max. gyorsulási tartományából?
Főleg Psoft kérte gombos verzióánál lehetne gond nélküle.
Sőt itt ki lehetne használni a start-stop frekit, meg az "S" gyorsulási görbe szerinti fejlesztésedet.
No nem akarok én belepofázni csak megindult a kivánsághormon az agyamban.
Van benne valami meredekséghatároló is, hogy ha odatekered a potit nagy sebességnél, akkor se lépjen ki a motor a max. gyorsulási tartományából?
Főleg Psoft kérte gombos verzióánál lehetne gond nélküle.
Sőt itt ki lehetne használni a start-stop frekit, meg az "S" gyorsulási görbe szerinti fejlesztésedet.
No nem akarok én belepofázni csak megindult a kivánsághormon az agyamban.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 január 20, 16:07
Írta: svejk Dátum 2019 január 20, 16:07
No, míg körmöltem szinte meg is válaszoltad. :)
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2019 január 20, 16:11
Írta: PSoft Dátum 2019 január 20, 16:11
Elárulom, egy lézer asztalemelésre gondolok.:)
Szerintem ez esetben, a rámpa sem gond...
Ha megcsinálod a két gombos verziót, -az általad jobban látható problémák kiküszöbölésével- érdekelne a dolog.
Szerintem ez esetben, a rámpa sem gond...
Ha megcsinálod a két gombos verziót, -az általad jobban látható problémák kiküszöbölésével- érdekelne a dolog.
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 január 20, 16:23
Írta: 4umhue7vh Dátum 2019 január 20, 16:23
Esetleg potméteres joystick?
Cím: Re:Léptetőmotor
Írta: remrendes Dátum 2019 január 20, 16:23
Írta: remrendes Dátum 2019 január 20, 16:23
Ilyenre nem lenne jobb egy mondjuk 6 gombos megoldas? Pluszminusz iranyban mondjuk egy 5mm, 1mm es 0,1mm gomb?
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2019 január 20, 16:31
Írta: PSoft Dátum 2019 január 20, 16:31
Igen, de az csak bonyolítaná a dolgot.
Én egyszerű kontaktusban gondolkodom, a többi meg...legyen az elektronika dolga.:)
No de akkor, én is elmélkedek...
Az általam vázolt feladatra elég volna egy csavarbehajtó motoros hajtása, -aksi helyett táp- az irányt kiválasztó kapcsoló, meg az "ahogy nyomom, úgy megy ravasz".
Én egyszerű kontaktusban gondolkodom, a többi meg...legyen az elektronika dolga.:)
No de akkor, én is elmélkedek...
Az általam vázolt feladatra elég volna egy csavarbehajtó motoros hajtása, -aksi helyett táp- az irányt kiválasztó kapcsoló, meg az "ahogy nyomom, úgy megy ravasz".
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2019 január 20, 16:33
Írta: PSoft Dátum 2019 január 20, 16:33
No de akkor, már nem is itt a helye, hanem a..."mechanikai ötletek"-ben.:)
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2019 január 20, 16:41
Írta: Szalai György Dátum 2019 január 20, 16:41
Nyomógombbal mindenképp az lesz a végeredmény, hogy vagy lassan forog a motor, vagy a lassulási rámpa miatt nem ott áll meg ahol elengedted a gombot.
Az eredmény kínlódás.
Visszacsatolás nélkül hosszabb távon üdvözítő megoldás szerintem a több fokozatban egymás után kapcsolható léptetési frekvencia plusz az egyeslépés üzemmód.
De kinek hogy.
Az eredmény kínlódás.
Visszacsatolás nélkül hosszabb távon üdvözítő megoldás szerintem a több fokozatban egymás után kapcsolható léptetési frekvencia plusz az egyeslépés üzemmód.
De kinek hogy.
Cím: Re:Léptetőmotor
Írta: remrendes Dátum 2019 január 20, 16:44
Írta: remrendes Dátum 2019 január 20, 16:44
Meg egy verzio, 1-1 gomb plusz-minusz es 1 gombbal lehet allitani a lepestavot. Mondjuk Arduinoval, plusz akar egy kis LCD-vel.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 január 20, 21:29
Írta: dtb Dátum 2019 január 20, 21:29
Egy szimpla Aruino-ra nem gondoltál? A driver hajtható róla, van analóg bemenete, tehát akár potmétert is tehetsz rá, és még gomboknak is marad bemenet.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 január 20, 21:30
Írta: dtb Dátum 2019 január 20, 21:30
de egyre gondoltunk:-)
[#taps][#taps][#taps]
[#taps][#taps][#taps]
Cím: Re:Léptetőmotor
Írta: Gyárfás Attila Dátum 2019 február 02, 08:49
Írta: Gyárfás Attila Dátum 2019 február 02, 08:49
Üdv
Egy kis tanács kellene.
Fitózáshoz kellene egy timelapse slider.
Egy hasonló mint ez.
https://youtu.be/YJUrCWnqNHM
Egy a rajta lévő motor léptető vagy dc legyen szerintetek.?
Ebay vagy Alin vannak ezek a stepper meg dc motor speed controlerek. Tudnátok ajánlani erre valami megoldást.?
Ami lényeges, nem nagy tömeget mozgatna, max. 3-400gr. Max 12v os legyen. Sebességet lehhessen állitani, pl. potival, köszi.
Egy kis tanács kellene.
Fitózáshoz kellene egy timelapse slider.
Egy hasonló mint ez.
https://youtu.be/YJUrCWnqNHM
Egy a rajta lévő motor léptető vagy dc legyen szerintetek.?
Ebay vagy Alin vannak ezek a stepper meg dc motor speed controlerek. Tudnátok ajánlani erre valami megoldást.?
Ami lényeges, nem nagy tömeget mozgatna, max. 3-400gr. Max 12v os legyen. Sebességet lehhessen állitani, pl. potival, köszi.
Cím: Re:Léptetőmotor
Írta: fpd0kbd4 Dátum 2019 február 08, 18:09
Írta: fpd0kbd4 Dátum 2019 február 08, 18:09
Kérem a törlést "adok-veszek"-be akartam
Cím: Re:Léptetőmotor
Írta: 4h4344ty Dátum 2019 február 11, 14:04
Írta: 4h4344ty Dátum 2019 február 11, 14:04
Tanácsot kérnék:
Léptető motor esetén (párhuzamos kötés, 3A) a meghajtó korlátozását csúcsáramra vagy RMS-re kell beállítani?
Léptető motor esetén (párhuzamos kötés, 3A) a meghajtó korlátozását csúcsáramra vagy RMS-re kell beállítani?
Cím: Re:Léptetőmotor
Írta: ibudwmwah Dátum 2019 március 26, 22:27
Írta: ibudwmwah Dátum 2019 március 26, 22:27
Sziasztok!
A mai nap folyamán egy "CNCPart" féle Pico Drive (P-type) motorvezérlőt akartam beüzemelni, de sajnos nem sikerült munkára bírni. Az első próbánál sajnos nem az egymáshoz tartózó léptetőmotor tekercsvégeket párosítottam össze, de utána rögtön javítottam a hibát és ezután se akarta az igazat. Utána kicseréltem egy másik ugyanilyen tipusú motorvezérlőre és azzal tökéletesen működött minden. A kérdésem az lenne, hogy ez okozhatta-e a léptetőmotor vezérlő meghibásodását? Mert más kockázatos dolgot nem csináltam vele ami esetleg hibát okozhatott volna. [#nemtudom]
A mai nap folyamán egy "CNCPart" féle Pico Drive (P-type) motorvezérlőt akartam beüzemelni, de sajnos nem sikerült munkára bírni. Az első próbánál sajnos nem az egymáshoz tartózó léptetőmotor tekercsvégeket párosítottam össze, de utána rögtön javítottam a hibát és ezután se akarta az igazat. Utána kicseréltem egy másik ugyanilyen tipusú motorvezérlőre és azzal tökéletesen működött minden. A kérdésem az lenne, hogy ez okozhatta-e a léptetőmotor vezérlő meghibásodását? Mert más kockázatos dolgot nem csináltam vele ami esetleg hibát okozhatott volna. [#nemtudom]
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2019 április 06, 20:08
Írta: ANTAL GÁBOR Dátum 2019 április 06, 20:08
Tisztelt Kollégák !
A mai debreceni találkozó miatt ragadok tollat .Ismét láttam Tuba István ( Egy újabbgépépítő )encoderrel visszacsatolt léptetőmotor (szuper!!) vezérlőjét . A korábbi ( székesfehérvári) találkozón is csak néztem mint a moziban .
A kommersz léptecs tengelyére ragasztott mágneses Hallos encoder informálja az elektronikát a léptecs tengelyének az állapotáról és ha az a kiadott parancstól eltér ( hiba képződik ) akkor a léptecs az erőnek erejével visszaáll a parancs által dekralált értékre .. Felületes szemlélő azt érzékeli mintha Dc ( AC ) szervó lenne a motor ill a driver
És akkor a javaslatom : A Fórumon évekkel ezelőtt az összetartó kollégák képesek voltak egy közös célért összefogni ( E240 es motorok behozatala Hollandiából (köszönet Svejknek ) , A300 as nyákok gyártása,( mind elfogyott azóta) spéci driver a E 240 es motorokhoz amit Sneci szervezett , és Tuba István is csinált egy szuper panelt amivel csoda dolgokat művelhettünk a Mach -hal
És akkor kinyögöm a javaslatomat :
Várom olyan kollégák jelentkezését akik szeretnének birtokolni olyan léptecs hajtást ami visszacsatolt ("SMART STEPPER")
Bírom István ígéretét: amennyiben kb 20 jelentkező összejön akkor nekiáll a gyártásnak Vagyok én minimum 2 vel Homovics Miklós is jelezte hogy kellene neki min 3 db
Reggelre kiszedem a fotókat a telefonomból és fölteszem ide a képeket
Addig is :a nagyobb egység egy Nema 23 es léptecsre építhető
. Extrém erős , ( Bőven nagyobb a nyomatéka mint 1.5 Nm )
A léptecs sokkal gyorsabb mint a hagyományos driverekkel és a rendszer ára ( amit remélem István az érdeklődők számának függvényében hamarosan kiszámol ) is NAGYON humánus .
Szóval : várom a potenciális jelentkezők nevét
.. István ! Te pedig kalkulálj és ha összejön a"kritikus tömeg ( elég aktuális a napjainkban ) akkor csinálj nekünk ilyet !!!
Ps : reggelre felteszek 1-2 fotót a látott csodáról
A mai debreceni találkozó miatt ragadok tollat .Ismét láttam Tuba István ( Egy újabbgépépítő )encoderrel visszacsatolt léptetőmotor (szuper!!) vezérlőjét . A korábbi ( székesfehérvári) találkozón is csak néztem mint a moziban .
A kommersz léptecs tengelyére ragasztott mágneses Hallos encoder informálja az elektronikát a léptecs tengelyének az állapotáról és ha az a kiadott parancstól eltér ( hiba képződik ) akkor a léptecs az erőnek erejével visszaáll a parancs által dekralált értékre .. Felületes szemlélő azt érzékeli mintha Dc ( AC ) szervó lenne a motor ill a driver
És akkor a javaslatom : A Fórumon évekkel ezelőtt az összetartó kollégák képesek voltak egy közös célért összefogni ( E240 es motorok behozatala Hollandiából (köszönet Svejknek ) , A300 as nyákok gyártása,( mind elfogyott azóta) spéci driver a E 240 es motorokhoz amit Sneci szervezett , és Tuba István is csinált egy szuper panelt amivel csoda dolgokat művelhettünk a Mach -hal
És akkor kinyögöm a javaslatomat :
Várom olyan kollégák jelentkezését akik szeretnének birtokolni olyan léptecs hajtást ami visszacsatolt ("SMART STEPPER")
Bírom István ígéretét: amennyiben kb 20 jelentkező összejön akkor nekiáll a gyártásnak Vagyok én minimum 2 vel Homovics Miklós is jelezte hogy kellene neki min 3 db
Reggelre kiszedem a fotókat a telefonomból és fölteszem ide a képeket
Addig is :a nagyobb egység egy Nema 23 es léptecsre építhető
. Extrém erős , ( Bőven nagyobb a nyomatéka mint 1.5 Nm )
A léptecs sokkal gyorsabb mint a hagyományos driverekkel és a rendszer ára ( amit remélem István az érdeklődők számának függvényében hamarosan kiszámol ) is NAGYON humánus .
Szóval : várom a potenciális jelentkezők nevét
.. István ! Te pedig kalkulálj és ha összejön a"kritikus tömeg ( elég aktuális a napjainkban ) akkor csinálj nekünk ilyet !!!
Ps : reggelre felteszek 1-2 fotót a látott csodáról
Cím: Re:Léptetőmotor
Írta: Devecz Miklós Dátum 2019 április 06, 20:20
Írta: Devecz Miklós Dátum 2019 április 06, 20:20
Ha elfogadható lesz az ára, akkor 3-(6) darabra én is jelentkezek.
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2019 április 06, 20:20
Írta: c2nsu773m Dátum 2019 április 06, 20:20
Ha nema32 is megoldható lenne akkor 3db érdekelne.
Kérdés 3 tengely esetén hogyan történik a visszaállás?
A másik két tengely is visszalép?
Kérdés 3 tengely esetén hogyan történik a visszaállás?
A másik két tengely is visszalép?
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2019 április 06, 20:54
Írta: Szalai György Dátum 2019 április 06, 20:54
Én is jelentkeznék pár darabra, de a határértékek és árak azért érdekelnének természetesen.
Cím: Re:Léptetőmotor
Írta: dezs Dátum 2019 április 06, 20:59
Írta: dezs Dátum 2019 április 06, 20:59
2-3 db nekem is jöhet.
(https://hobbicncforum.hu/uploaded_images/2019/04/tn_g67z2f6qnymd2mzhcqqc_1047.jpg) (https://hobbicncforum.hu/uploaded_images/2019/04/g67z2f6qnymd2mzhcqqc_1047.jpg)
(https://hobbicncforum.hu/uploaded_images/2019/04/tn_g67z2f6qnymd2mzhcqqc_1047.jpg) (https://hobbicncforum.hu/uploaded_images/2019/04/g67z2f6qnymd2mzhcqqc_1047.jpg)
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2019 április 06, 21:07
Írta: ANTAL GÁBOR Dátum 2019 április 06, 21:07
Frászt ! Csak az a tengely lép vissza aminél a hiba képződött. Bezárom a rendszert egy black box" ba és tekergetem a kiálló tengelyt : , pont úgy működik mint egy Dc szervó ( csak nem "zizeg " ) viszont nincsen keféje, helyette olcsó és erős . Van egy rendszerem ami korábban léptecsre épült . Ha túlteheltem akkor létrejött a lépéstévesztés és gebasz , No ez a hibatárolóban maximált hiba erejéig kijavítja hibát ...
A Nema 23 az csak egy fizikai lehetőség ( a panel mérete ) az áram a döntő. A driver ( emlékeim szerint ) Kb 3 A es DE : más az a 3 amper mint a normál esetben
A Nema 23 az csak egy fizikai lehetőség ( a panel mérete ) az áram a döntő. A driver ( emlékeim szerint ) Kb 3 A es DE : más az a 3 amper mint a normál esetben
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 április 06, 21:11
Írta: dtb Dátum 2019 április 06, 21:11
Amper és ára függvényében akár 10 darab is...
Cím: Re:Léptetőmotor
Írta: bicme92us Dátum 2019 április 06, 21:15
Írta: bicme92us Dátum 2019 április 06, 21:15
Az én értelmezésem szerint mindegyik motornak saját enkóderes vezérlője van, amelyik ha lépésvesztés lenne korrigálja a lépéseket. Tehát mindegyik motor független a másiktól önálló.
tehát akár a központi vezérlő hibáit is képes kijavítani
tehát akár a központi vezérlő hibáit is képes kijavítani
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 április 06, 21:18
Írta: dtb Dátum 2019 április 06, 21:18
Ez igaz, de lényeges a hiba visszacsatolás. Nekem olyan closed loop-os (kínai) léptetőm van, aminek van ARM kimenete, ha hiba van, le lehet tiltani a további munkát. Gondolj bele, két oldali hajtásnál megáll az egyik motor, te meg nézed, ahogy eltekeredik az Y hid...
Cím: Re:Léptetőmotor
Írta: dezsoe Dátum 2019 április 06, 21:19
Írta: dezsoe Dátum 2019 április 06, 21:19
Ártól függően 3 vagy 6 db-ra én is beszállok. Nagyon igényes kis szerkezet!
Cím: Re:Léptetőmotor
Írta: morvfer7 Dátum 2019 április 06, 21:44
Írta: morvfer7 Dátum 2019 április 06, 21:44
3 db engem is érdekelne.
Cím: Re:Léptetőmotor
Írta: xt79ipd3 Dátum 2019 április 06, 21:45
Írta: xt79ipd3 Dátum 2019 április 06, 21:45
A további részletekre én is kíváncsi lennék. 3 darabbal lennék érintett.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 április 06, 21:47
Írta: 000000000 Dátum 2019 április 06, 21:47
"..erős.."
Mitől erős és hány %-al erősebb mint az érzékelő nélküli léptető motor? Az eső M/n karakterisztika ugyanúgy megmarad (nagyob fordulatoknál lecsökken a nyomatéka), hiszen a léptető motorból nem lesz AC vagy DC szervomotor, "vasba öntött" az alap képessége.
Mitől erős és hány %-al erősebb mint az érzékelő nélküli léptető motor? Az eső M/n karakterisztika ugyanúgy megmarad (nagyob fordulatoknál lecsökken a nyomatéka), hiszen a léptető motorból nem lesz AC vagy DC szervomotor, "vasba öntött" az alap képessége.
Cím: Re:Léptetőmotor
Írta: prinx Dátum 2019 április 06, 21:51
Írta: prinx Dátum 2019 április 06, 21:51
Üdv, 4db-ra vevő lennék, esetleg ha Nema34 léptecsekre is lenne ahhoz is érdekelne ha jó áron lesz.
Köszönettel H.Attila
Köszönettel H.Attila
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2019 április 06, 21:57
Írta: ANTAL GÁBOR Dátum 2019 április 06, 21:57
Vártam a negatívumokat is .
Tippem ( is!) volt a beíróra. ( süllyedt talált : T45 alias Robsy ) )
.Csinálj olyat mint István és azután fanyalgás helyett mérd ki ! Csodálkozni fogsz .....
Tippem ( is!) volt a beíróra. ( süllyedt talált : T45 alias Robsy ) )
.Csinálj olyat mint István és azután fanyalgás helyett mérd ki ! Csodálkozni fogsz .....
Cím: Re:Léptetőmotor
Írta: Jenei László Dátum 2019 április 06, 22:03
Írta: Jenei László Dátum 2019 április 06, 22:03
Üdv! Ártól függően 4-8db érdekelne.J.Laci
Cím: Re:Léptetőmotor
Írta: sastas Dátum 2019 április 06, 22:07
Írta: sastas Dátum 2019 április 06, 22:07
Gábor, legalább 3 darabra én is vevő vagyok.
Robsy-tól mit vártál? Fotókkal dokumentált utánépítést [#taps][#violent]
Robsy-tól mit vártál? Fotókkal dokumentált utánépítést [#taps][#violent]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 április 06, 22:14
Írta: 000000000 Dátum 2019 április 06, 22:14
Nem kell ez a mellébeszélés, személyeskedö duma, az igazságról, a szakmai tényekről beszélj, amit felvetettem, mert arról egy szavad se volt!
Nagyon fontos lenne két összehasonlító M/n diagram egy closed loop és egy open loop esetről azonos motor esetén. Az egyértelműen mutatja majd, mekkora csak a javaulás.
Mellesleg a 2017-ben a fehérvári talin is egy Easy-servo kapcsán ezt a technikát bemértem, tehát kár mérésre buzdítanod régen megtörténtek.
Nagyon fontos lenne két összehasonlító M/n diagram egy closed loop és egy open loop esetről azonos motor esetén. Az egyértelműen mutatja majd, mekkora csak a javaulás.
Mellesleg a 2017-ben a fehérvári talin is egy Easy-servo kapcsán ezt a technikát bemértem, tehát kár mérésre buzdítanod régen megtörténtek.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 április 06, 22:22
Írta: 000000000 Dátum 2019 április 06, 22:22
Téged is megkérnélek, hogy a téves előitéletes szövegedet hanyagoljad velem kapcsolatban, szakmai alapon vitázz velem, és az energiáidat inkább pl. normális, helyes alkatrész rajzok elkészíétésére fordítsad!!![#ejnye1]
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2019 április 06, 22:32
Írta: ANTAL GÁBOR Dátum 2019 április 06, 22:32
Tartsd meg a mérési eredményeidet és ne légy kerékkötője egy hasznos dolognak
Kár duzzogni! Jó és hasznos dolog amit felvetek
Ja hogy nem a te fejedből pattant ki . Sajnálom..
Hát igyekezni kell ... Én még nem láttam olyan komoly mikrokontrolleres egységet (megépítve) felprogramozva tőled mint amit István napi szinten tud .
A CD4011 NE555 korszaka lezárult ( bármennyire is fájdalmas)
Kár duzzogni! Jó és hasznos dolog amit felvetek
Ja hogy nem a te fejedből pattant ki . Sajnálom..
Hát igyekezni kell ... Én még nem láttam olyan komoly mikrokontrolleres egységet (megépítve) felprogramozva tőled mint amit István napi szinten tud .
A CD4011 NE555 korszaka lezárult ( bármennyire is fájdalmas)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 április 06, 22:44
Írta: 000000000 Dátum 2019 április 06, 22:44
"ne légy kerékkötője egy hasznos dolognak
Kár duzzogni! Jó és hasznos dolog amit felvetek
Ja hogy nem a te fejedből pattant ki"
[#csodalk][#nyes]
Kértelek már, ilyen ok nélküli személyeskedő szöveg helyett inkább nézz utána a szakirodalomban, mekkora az M/n görbe változás.
Mellesleg gratulálok Istvánnak, (természetesen semmi irigység nincs bennem), és felőlem 1000 darabig meg se álljatok, csak azért tudjátok, mit is vesztek, és mit is reméltek ettől, és mik a száraz műszaki tények.
Kár duzzogni! Jó és hasznos dolog amit felvetek
Ja hogy nem a te fejedből pattant ki"
[#csodalk][#nyes]
Kértelek már, ilyen ok nélküli személyeskedő szöveg helyett inkább nézz utána a szakirodalomban, mekkora az M/n görbe változás.
Mellesleg gratulálok Istvánnak, (természetesen semmi irigység nincs bennem), és felőlem 1000 darabig meg se álljatok, csak azért tudjátok, mit is vesztek, és mit is reméltek ettől, és mik a száraz műszaki tények.
Cím: Re:Léptetőmotor
Írta: sastas Dátum 2019 április 06, 23:00
Írta: sastas Dátum 2019 április 06, 23:00
Már megint keresed a kákán a csomót.
Más témában leírtam már, de most kifejezetten Neked címezve. Mutass is valamit, ne csak a levegőbe beszélj. Én(személy szerint saját szememmel) több gépet, mérési módszert és dokumentációt láttam már Gábortól. Te mindig csak írogatsz itt a görbékről meg a száraz elméleteidről, de egy képet, vagy doksit ami alátámasztana, igazolna nem vagy hajlandó prezentálni.
A részedről sem érkezett semmi érdemi adat csak behánytál egy mondatot. Aztán ahhoz ragaszkodsz foggal körömmel, hogy más mennyire hülye, hogy nem hallgat rád. Mutass valamit. Addig minden csak fikázás.
Más témában leírtam már, de most kifejezetten Neked címezve. Mutass is valamit, ne csak a levegőbe beszélj. Én(személy szerint saját szememmel) több gépet, mérési módszert és dokumentációt láttam már Gábortól. Te mindig csak írogatsz itt a görbékről meg a száraz elméleteidről, de egy képet, vagy doksit ami alátámasztana, igazolna nem vagy hajlandó prezentálni.
A részedről sem érkezett semmi érdemi adat csak behánytál egy mondatot. Aztán ahhoz ragaszkodsz foggal körömmel, hogy más mennyire hülye, hogy nem hallgat rád. Mutass valamit. Addig minden csak fikázás.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2019 április 06, 23:02
Írta: ANTAL GÁBOR Dátum 2019 április 06, 23:02
Majd Moparman úgy is kitörli De nem hagyom hogy az utolsó bejegyzés a tied legyen :
Egy kérdés : nem jutott benzin az Alekó-dba ?
Bp - Debrecen nem oly nagy távolság . Személyesen is meggyőződhettél volna arról amit állítok ...
Egy kérdés : nem jutott benzin az Alekó-dba ?
Bp - Debrecen nem oly nagy távolság . Személyesen is meggyőződhettél volna arról amit állítok ...
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2019 április 07, 07:07
Írta: ANTAL GÁBOR Dátum 2019 április 07, 07:07
És akkor az ígért fénykép . A feltűzhető kijelző segítségével láthatóvá válnak a beállított paraméterek . ( áram , hiba stb) Az egység felprogramozása a panelon 4 db kis nyomógombbal történik .. És mint a képen látható minden a motor végén helyezkedik el . Csak táp kell neki ( Dc 24 V )
(https://hobbicncforum.hu/uploaded_images/2019/04/tn_wnvnh3sinm48f32hwbsvn_906.jpg) (https://hobbicncforum.hu/uploaded_images/2019/04/wnvnh3sinm48f32hwbsvn_906.jpg)
(https://hobbicncforum.hu/uploaded_images/2019/04/tn_wnvnh3sinm48f32hwbsvn_906.jpg) (https://hobbicncforum.hu/uploaded_images/2019/04/wnvnh3sinm48f32hwbsvn_906.jpg)
Cím: Re:Léptetőmotor
Írta: guliver83 Dátum 2019 április 07, 07:16
Írta: guliver83 Dátum 2019 április 07, 07:16
Már csak egy ár kellene.
[#eljen]
[#eljen]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 április 07, 07:24
Írta: 000000000 Dátum 2019 április 07, 07:24
"Mutass is valamit, ne csak a levegőbe beszélj. Te mindig csak írogatsz itt a görbékről meg a száraz elméleteidről, de egy képet, vagy doksit ami alátámasztana, igazolna nem vagy hajlandó prezentálni."
Megkérlek ismét, ne hazudozzál![#ejnye1]
A Robsy motorhajtás dinamikai mérőrendszereimről itt (http://www.robsy.hu/#2tema) olvashatsz. Ezen mérési eredmények kapcsán pedig nagy dinamikájú, különleges szinkronhajtás fejlesztéseim, alkalmazásaim vannak, pl. itt (http://www.robsy.hu/te7/robsy-csavexc.mp4) és itt (http://www.robsy.hu/te7/robsy-menetexc.mpg) prezentáltam. A fórumon is számos helyen találsz utalásokat az egységugrás tesztjeimről, hobby CNC találkozókon 2006 óta ezek nagy részét bemutattam. Sajnálom, hogy egyszer se jöttél oda hozzám, akkor talán nem hazudoznál itt össze-vissza velem kapcsolatban.
A helyedben arról az apró tényről se feledkeznék meg, hogy te még se születtél, amikor én már saját fejlesztésű CNC szervohajtású Robsy oktató és labor robot család fejlesztésével, gyártásával foglalkoztam. Így aztán szívesen mesélek neked személyesen a villamos motorok kéttárolós differenciál egyenletéről és az abból fakadó műszaki következményekről is.[#hamm][#wave]
Megkérlek ismét, ne hazudozzál![#ejnye1]
A Robsy motorhajtás dinamikai mérőrendszereimről itt (http://www.robsy.hu/#2tema) olvashatsz. Ezen mérési eredmények kapcsán pedig nagy dinamikájú, különleges szinkronhajtás fejlesztéseim, alkalmazásaim vannak, pl. itt (http://www.robsy.hu/te7/robsy-csavexc.mp4) és itt (http://www.robsy.hu/te7/robsy-menetexc.mpg) prezentáltam. A fórumon is számos helyen találsz utalásokat az egységugrás tesztjeimről, hobby CNC találkozókon 2006 óta ezek nagy részét bemutattam. Sajnálom, hogy egyszer se jöttél oda hozzám, akkor talán nem hazudoznál itt össze-vissza velem kapcsolatban.
A helyedben arról az apró tényről se feledkeznék meg, hogy te még se születtél, amikor én már saját fejlesztésű CNC szervohajtású Robsy oktató és labor robot család fejlesztésével, gyártásával foglalkoztam. Így aztán szívesen mesélek neked személyesen a villamos motorok kéttárolós differenciál egyenletéről és az abból fakadó műszaki következményekről is.[#hamm][#wave]
Cím: Re:Léptetőmotor
Írta: ebalint Dátum 2019 április 07, 07:25
Írta: ebalint Dátum 2019 április 07, 07:25
Talán jobb lett volna, ha a műszaki tartalmat a készítője tárta volna elénk, így kizárható lett volna ilyen-olyan félreértések, pontatlan fogalmazás miatti vita.
A "szervezés" ötlete becsülendő.
A "szervezés" ötlete becsülendő.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2019 április 07, 07:31
Írta: Szalai György Dátum 2019 április 07, 07:31
Azt gondolom, hogy a 24V 3A határ, a felhasználást a kis, gyenge gépekre korlátozza.
Lehet ezen emelni? Mondjuk 80V 10A környékére?
Még egy tulajdonság fontos. Nekem legalábbis.
Lehet-e a tartóáramot alacsony értékre állítani?
Lehet ezen emelni? Mondjuk 80V 10A környékére?
Még egy tulajdonság fontos. Nekem legalábbis.
Lehet-e a tartóáramot alacsony értékre állítani?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 április 07, 07:51
Írta: 000000000 Dátum 2019 április 07, 07:51
Micsoda stílus ez megint?[#wilting][#conf][#csodalk]
Mi az összefüggés szerinted egy ember szakmai felkészültsége és hogy van-e, és hány éves az autója között? Hát a nagy semmi!
Ugyanis ismerhetünk pár világhíres professzort, akinek nincs autója, gyalog, vagy tömegközlekedéssel jár, viszont sok olyan ostoba, idióta gazember is van ebben az országban, akinek a feneke alatt több tízmilliós új autó van.
Úgy látom a néhány karekteres csicsa kijelző a motoron totál csődöt okozott nálad az utóbbi megnyilvánulásaid kapcsán.[#nyes][#conf]
Arról mesélj inkább, hogy pl. 1000 rpm körüli léptetőmotor fordulatnál beavatkozási helyzetben honnan lesz 5 - 20-szor nagyobb motornyomaték, amitől valóságos és hatékony pozíció szabályzás tudna megvalósulni, mint az AC és DC szervóknál?
Vagy azt gondolod, hogy ez a fő műszaki kérdés mellékes, és a csilivili kijelző ezt is megoldja? Ugyan már, ne bohóckodjunk emberek!
Mi az összefüggés szerinted egy ember szakmai felkészültsége és hogy van-e, és hány éves az autója között? Hát a nagy semmi!
Ugyanis ismerhetünk pár világhíres professzort, akinek nincs autója, gyalog, vagy tömegközlekedéssel jár, viszont sok olyan ostoba, idióta gazember is van ebben az országban, akinek a feneke alatt több tízmilliós új autó van.
Úgy látom a néhány karekteres csicsa kijelző a motoron totál csődöt okozott nálad az utóbbi megnyilvánulásaid kapcsán.[#nyes][#conf]
Arról mesélj inkább, hogy pl. 1000 rpm körüli léptetőmotor fordulatnál beavatkozási helyzetben honnan lesz 5 - 20-szor nagyobb motornyomaték, amitől valóságos és hatékony pozíció szabályzás tudna megvalósulni, mint az AC és DC szervóknál?
Vagy azt gondolod, hogy ez a fő műszaki kérdés mellékes, és a csilivili kijelző ezt is megoldja? Ugyan már, ne bohóckodjunk emberek!
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2019 április 07, 08:00
Írta: Szalai György Dátum 2019 április 07, 08:00
Szerintem, de Te ezt jobban tudod.
Attól ,,erős", hogy a motortengely szöghelyzetének ismeretében a betáplált villamos energiának nagyobb részét lehet forgatónyomaték létrehozásra fordítani, mint a szöghelyzet ismerete nélkül.
Míg a hagyományos léptetőmotor meghajtó pocsékolja a motor ,,vasba öntött" képességeit, mert a villamos energiát nem jó pillanatban (szöghelyzetben) és nem optimális mértékben adagolja, ezért a motor, az idő jelentős részében, forgatónyomaték létrehozása helyett csak melegszik.
Valószínűleg a léptetőmotoros lépés-veszteség kompenzált hajtás nem egyenértékű egy szervomotoros pozíciószabályozással, de legalább már közelit hozzá.
Attól ,,erős", hogy a motortengely szöghelyzetének ismeretében a betáplált villamos energiának nagyobb részét lehet forgatónyomaték létrehozásra fordítani, mint a szöghelyzet ismerete nélkül.
Míg a hagyományos léptetőmotor meghajtó pocsékolja a motor ,,vasba öntött" képességeit, mert a villamos energiát nem jó pillanatban (szöghelyzetben) és nem optimális mértékben adagolja, ezért a motor, az idő jelentős részében, forgatónyomaték létrehozása helyett csak melegszik.
Valószínűleg a léptetőmotoros lépés-veszteség kompenzált hajtás nem egyenértékű egy szervomotoros pozíciószabályozással, de legalább már közelit hozzá.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 április 07, 08:33
Írta: dtb Dátum 2019 április 07, 08:33
Egyetértek veled, nálam is a terhelhetőség lenne a fő kérdés, de szerintem ilyen méretekben a 10A irreális elvárás. Gyakorlatias megközelítésből nézve, a 2Nm léptetőmotorok kb. 4A-5A körül mennek, szerintem ezt kéne tudnia a tömeges felhasználhatóságért.
A fotót nézegetve csak két inputot látni, gondolom a step+dir.
Van bármi féle hiba visszacsatolás a PC irányába, ha valami gebasz van?
Ha a vezérlő csak 3A terhelhető, akkor 5db kellene, ha többet is tud, akkor akár 10 is.
A fotót nézegetve csak két inputot látni, gondolom a step+dir.
Van bármi féle hiba visszacsatolás a PC irányába, ha valami gebasz van?
Ha a vezérlő csak 3A terhelhető, akkor 5db kellene, ha többet is tud, akkor akár 10 is.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 április 07, 08:39
Írta: 000000000 Dátum 2019 április 07, 08:39
Szerintem valamit alaposan félreértesz Te most itt ezekkel a gondolataiddal, hiszen a léptetőmotor alap M/n görbéje adott, és az rendkívül kedvezőtlen szabályozhatóság szempontjából magasabb fordulatszámok esetében.
A műszaki szabályzás egyik alapfeltétele pedig az, hogy a végrehajtó eszköz (itt éppen egy léptecs) képes legyen tág határok között a névleges paraméterének az X-szeres túlteljesítésére bizonyos idő tartományban, ha a rendelkezőjel azt úgy kívánja.
Szerinted konkrétan mennyi ez az X egy léptető motornál ilyen esetben, és egyáltalán milyen lehetőséged van ezt növelni? Na ez itt a fő kérdés, ezen érdemes elgondolkodni.
A műszaki szabályzás egyik alapfeltétele pedig az, hogy a végrehajtó eszköz (itt éppen egy léptecs) képes legyen tág határok között a névleges paraméterének az X-szeres túlteljesítésére bizonyos idő tartományban, ha a rendelkezőjel azt úgy kívánja.
Szerinted konkrétan mennyi ez az X egy léptető motornál ilyen esetben, és egyáltalán milyen lehetőséged van ezt növelni? Na ez itt a fő kérdés, ezen érdemes elgondolkodni.
Cím: Re:Léptetőmotor
Írta: svager Dátum 2019 április 07, 09:06
Írta: svager Dátum 2019 április 07, 09:06
Megy a kavarás mint mindig![#nemtudom]
A találkozón bemutatott,és a [#t23p1274#] publikált vezérlöről kell eldönteni,hogy igény van rávagy sem.
Nem 5A,nem 10A,erre a konkrét tipusról van szó!
Itt az a kérdés,hogy összejöne legalább 20 darabra igény mivel az István ESETLEG! foglalkozna vele.
A találkozón bemutatott,és a [#t23p1274#] publikált vezérlöről kell eldönteni,hogy igény van rávagy sem.
Nem 5A,nem 10A,erre a konkrét tipusról van szó!
Itt az a kérdés,hogy összejöne legalább 20 darabra igény mivel az István ESETLEG! foglalkozna vele.
Cím: Re:Léptetőmotor
Írta: uferi Dátum 2019 április 07, 12:28
Írta: uferi Dátum 2019 április 07, 12:28
Tisztelt fórumtársaim!
Kipróbálva a debreceni találkozón a motorokra szerelt elektronika működését illetve utánaolvasva az eredeti terv dokumentációját én is vevő lennék 4 darabra nema23 léptecsre ha az ára belefér kb. 10.000Ft-os összegebe. Azért, hogy a jelentkezők listája és az igényelt darabok száma világos legyen egy listát nyitok aemelyen szerepelnek a nevek és darbszámok:
1. ANTAL GÁBOR 2
2. Homovics Miklós 3
3. Devecz Miklós 3-6
4. Török Tamás 3
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen)
8. morvfer7 3
9. roland7 3
10.prinx 4
11.Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen)
=============================================
Eddig összesen: 40-50 darab + n darab
Aki érintett a litán és változtatna a számokon az legyen szíves frissítse az összeget is!
Minden jót,
Feri
Kipróbálva a debreceni találkozón a motorokra szerelt elektronika működését illetve utánaolvasva az eredeti terv dokumentációját én is vevő lennék 4 darabra nema23 léptecsre ha az ára belefér kb. 10.000Ft-os összegebe. Azért, hogy a jelentkezők listája és az igényelt darabok száma világos legyen egy listát nyitok aemelyen szerepelnek a nevek és darbszámok:
1. ANTAL GÁBOR 2
2. Homovics Miklós 3
3. Devecz Miklós 3-6
4. Török Tamás 3
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen)
8. morvfer7 3
9. roland7 3
10.prinx 4
11.Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen)
=============================================
Eddig összesen: 40-50 darab + n darab
Aki érintett a litán és változtatna a számokon az legyen szíves frissítse az összeget is!
Minden jót,
Feri
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2019 április 07, 14:02
Írta: PSoft Dátum 2019 április 07, 14:02
Tisztelt fórumtársaim!
Kipróbálva a debreceni találkozón a motorokra szerelt elektronika működését illetve utánaolvasva az eredeti terv dokumentációját én is vevő lennék 4 darabra nema23 léptecsre ha az ára belefér kb. 10.000Ft-os összegebe. Azért, hogy a jelentkezők listája és az igényelt darabok száma világos legyen egy listát nyitok aemelyen szerepelnek a nevek és darbszámok:
1. ANTAL GÁBOR 2
2. Homovics Miklós 3
3. Devecz Miklós 3-6
4. Török Tamás 3
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen)
8. morvfer7 3
9. roland7 3
10.prinx 4
11.Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen)
14. PSoft 5
=============================================
Eddig összesen: 50-55 darab + n darab
Aki érintett a litán és változtatna a számokon az legyen szíves frissítse az összeget is!
Minden jót,
Feri
Kipróbálva a debreceni találkozón a motorokra szerelt elektronika működését illetve utánaolvasva az eredeti terv dokumentációját én is vevő lennék 4 darabra nema23 léptecsre ha az ára belefér kb. 10.000Ft-os összegebe. Azért, hogy a jelentkezők listája és az igényelt darabok száma világos legyen egy listát nyitok aemelyen szerepelnek a nevek és darbszámok:
1. ANTAL GÁBOR 2
2. Homovics Miklós 3
3. Devecz Miklós 3-6
4. Török Tamás 3
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen)
8. morvfer7 3
9. roland7 3
10.prinx 4
11.Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen)
14. PSoft 5
=============================================
Eddig összesen: 50-55 darab + n darab
Aki érintett a litán és változtatna a számokon az legyen szíves frissítse az összeget is!
Minden jót,
Feri
Cím: Re:Léptetőmotor
Írta: s5f8tmfv3 Dátum 2019 április 07, 15:54
Írta: s5f8tmfv3 Dátum 2019 április 07, 15:54
Tisztelt fórumtársaim!
Kipróbálva a debreceni találkozón a motorokra szerelt elektronika működését illetve utánaolvasva az eredeti terv dokumentációját én is vevő lennék 4 darabra nema23 léptecsre ha az ára belefér kb. 10.000Ft-os összegebe. Azért, hogy a jelentkezők listája és az igényelt darabok száma világos legyen egy listát nyitok aemelyen szerepelnek a nevek és darbszámok:
1. ANTAL GÁBOR 2
2. Homovics Miklós 3
3. Devecz Miklós 3-6
4. Török Tamás 3
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen)
8. morvfer7 3
9. roland7 3
10.prinx 4
11.Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen)
14. PSoft 5
15. Amatőr 3 (feltételesen)
=============================================
Eddig összesen: 50-55 darab + n darab
Aki érintett a litán és változtatna a számokon az legyen szíves frissítse az összeget is!
Minden jót,
Feri
Kipróbálva a debreceni találkozón a motorokra szerelt elektronika működését illetve utánaolvasva az eredeti terv dokumentációját én is vevő lennék 4 darabra nema23 léptecsre ha az ára belefér kb. 10.000Ft-os összegebe. Azért, hogy a jelentkezők listája és az igényelt darabok száma világos legyen egy listát nyitok aemelyen szerepelnek a nevek és darbszámok:
1. ANTAL GÁBOR 2
2. Homovics Miklós 3
3. Devecz Miklós 3-6
4. Török Tamás 3
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen)
8. morvfer7 3
9. roland7 3
10.prinx 4
11.Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen)
14. PSoft 5
15. Amatőr 3 (feltételesen)
=============================================
Eddig összesen: 50-55 darab + n darab
Aki érintett a litán és változtatna a számokon az legyen szíves frissítse az összeget is!
Minden jót,
Feri
Cím: Re:Léptetőmotor
Írta: mex Dátum 2019 április 07, 16:24
Írta: mex Dátum 2019 április 07, 16:24
Tisztelt fórumtársaim!
Kipróbálva a debreceni találkozón a motorokra szerelt elektronika működését illetve utánaolvasva az eredeti terv dokumentációját én is vevő lennék 4 darabra nema23 léptecsre ha az ára belefér kb. 10.000Ft-os összegebe. Azért, hogy a jelentkezők listája és az igényelt darabok száma világos legyen egy listát nyitok aemelyen szerepelnek a nevek és darbszámok:
1. ANTAL GÁBOR 2
2. Homovics Miklós 3
3. Devecz Miklós 3-6
4. Török Tamás 3
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen)
8. morvfer7 3
9. roland7 3
10.prinx 4
11.Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
=============================================
Eddig összesen: 55-60 darab + n darab
Aki érintett a litán és változtatna a számokon az legyen szíves frissítse az összeget is!
Minden jót,
Feri
Kipróbálva a debreceni találkozón a motorokra szerelt elektronika működését illetve utánaolvasva az eredeti terv dokumentációját én is vevő lennék 4 darabra nema23 léptecsre ha az ára belefér kb. 10.000Ft-os összegebe. Azért, hogy a jelentkezők listája és az igényelt darabok száma világos legyen egy listát nyitok aemelyen szerepelnek a nevek és darbszámok:
1. ANTAL GÁBOR 2
2. Homovics Miklós 3
3. Devecz Miklós 3-6
4. Török Tamás 3
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen)
8. morvfer7 3
9. roland7 3
10.prinx 4
11.Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
=============================================
Eddig összesen: 55-60 darab + n darab
Aki érintett a litán és változtatna a számokon az legyen szíves frissítse az összeget is!
Minden jót,
Feri
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2019 április 07, 16:56
Írta: Egyújabbgépépítő Dátum 2019 április 07, 16:56
Sziasztok!
Sajnálom,hogy megint ekkora felfordulást okoztam.
Figyelmetekbe ajánlom a 1276 hozzászólást is a Bipoláris topikban.
Múlt évben Fehérváron már ott volt, nem igazán okozott feltűnést, Debrecenbe talán azért mert mellé raktam egy "tojásrajzolót" is.
A tisztánlátás végett a kiindulás:
A KICKSTARTER-en indult 2016-ban. (https://www.kickstarter.com/projects/tropicallabs/mechaduino-powerful-open-source-industrial-servo-m/posts/1669946)
A mai napig megvásárolható tőlük. (https://tropical-labs.com/shop/mechaduino-0-2-pcb/)
Természetesen Kínából is olcsóbban. (https://www.aliexpress.com/item/Upgrade-NEMA17-Nano-Zero-Stepper-Motor-Same-3-2A-NEMA23-Smart-Stepper-With-Closed-Loop-Motor/32952859759.html?spm=2114.search0604.3.7.4e9f697bZ5dYFi&ws_ab_test=searchweb0_0,searchweb201602_5_10065_10068_10890_10546_319_10059_10884_10548_317_10887_10696_321_322_453_10084_10083_454_10103_10618_10304_10307_10820_537_536,searchweb201603_70,ppcSwitch_0&algo_expid=2761ea56-663d-4d7f-bb7b-eb2200012706-1&algo_pvid=2761ea56-663d-4d7f-bb7b-eb2200012706)
Persze többen felkarolták, készült hozzá automatikus PID hangoló program is.
A hátránya, hogy minden beállítást, kalibrálást vissza kell másolnia forrásba és újra égetni.
Ezt a projektet gondolta tovább Trampas. (http://misfittech.net/smart-steppers/)
Kiegészítette egy OLED kijelzővel és a paramétereket már nem kell újrafordítással beégetni, hanem automatikusan rögzíti a program.
Mivel nyílt forráskódú megépítettem és már több mint 2 éve használom a 3D nyomtatómban.
Amit változtattam:
A step/dir bemenet kapott egy opto leválasztást, és a NEMA23 -as verziót NEMA17 -re sűrítettem, mivel egyre több NEMA17-es motor kér több mint 2A-t.
Végül nekem 2 verzióm van, egy 2A-es és egy 3A-es.
Mindkettő NEMA17 méretben, ami most Debrecenben egy nyomtatott adapterrel került a 23-as motorra.
Ha a nagy többség a NEMA23 -ast szeretné érdemes visszatérni arra a formátumra.
Sajnálom,hogy megint ekkora felfordulást okoztam.
Figyelmetekbe ajánlom a 1276 hozzászólást is a Bipoláris topikban.
Múlt évben Fehérváron már ott volt, nem igazán okozott feltűnést, Debrecenbe talán azért mert mellé raktam egy "tojásrajzolót" is.
A tisztánlátás végett a kiindulás:
A KICKSTARTER-en indult 2016-ban. (https://www.kickstarter.com/projects/tropicallabs/mechaduino-powerful-open-source-industrial-servo-m/posts/1669946)
A mai napig megvásárolható tőlük. (https://tropical-labs.com/shop/mechaduino-0-2-pcb/)
Természetesen Kínából is olcsóbban. (https://www.aliexpress.com/item/Upgrade-NEMA17-Nano-Zero-Stepper-Motor-Same-3-2A-NEMA23-Smart-Stepper-With-Closed-Loop-Motor/32952859759.html?spm=2114.search0604.3.7.4e9f697bZ5dYFi&ws_ab_test=searchweb0_0,searchweb201602_5_10065_10068_10890_10546_319_10059_10884_10548_317_10887_10696_321_322_453_10084_10083_454_10103_10618_10304_10307_10820_537_536,searchweb201603_70,ppcSwitch_0&algo_expid=2761ea56-663d-4d7f-bb7b-eb2200012706-1&algo_pvid=2761ea56-663d-4d7f-bb7b-eb2200012706)
Persze többen felkarolták, készült hozzá automatikus PID hangoló program is.
A hátránya, hogy minden beállítást, kalibrálást vissza kell másolnia forrásba és újra égetni.
Ezt a projektet gondolta tovább Trampas. (http://misfittech.net/smart-steppers/)
Kiegészítette egy OLED kijelzővel és a paramétereket már nem kell újrafordítással beégetni, hanem automatikusan rögzíti a program.
Mivel nyílt forráskódú megépítettem és már több mint 2 éve használom a 3D nyomtatómban.
Amit változtattam:
A step/dir bemenet kapott egy opto leválasztást, és a NEMA23 -as verziót NEMA17 -re sűrítettem, mivel egyre több NEMA17-es motor kér több mint 2A-t.
Végül nekem 2 verzióm van, egy 2A-es és egy 3A-es.
Mindkettő NEMA17 méretben, ami most Debrecenben egy nyomtatott adapterrel került a 23-as motorra.
Ha a nagy többség a NEMA23 -ast szeretné érdemes visszatérni arra a formátumra.
Cím: Re:Léptetőmotor
Írta: prinx Dátum 2019 április 07, 17:00
Írta: prinx Dátum 2019 április 07, 17:00
Üdv fórum társak elfelejtettem beírni a méretet ezért pótolom, én is Nema23 méretbe vennék 4db-ot.
Üdv H.Attila
Üdv H.Attila
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 április 07, 17:19
Írta: dtb Dátum 2019 április 07, 17:19
Ne sajnáld, nem Te okoztál felfordulást!!! :-)
Nekem egy kérdésem lenne, amit korábban is megfogalmaztam már, a N23 verziónál az amper terhelhetőséget nem lehetne legalább 4A-ra feltornázni?
Nekem egy kérdésem lenne, amit korábban is megfogalmaztam már, a N23 verziónál az amper terhelhetőséget nem lehetne legalább 4A-ra feltornázni?
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2019 április 07, 17:47
Írta: Egyújabbgépépítő Dátum 2019 április 07, 17:47
A max. áramot a beépített meghajtók határozzák meg.
A 2A-esben A4954 van. (https://www.allegromicro.com/en/Products/Motor-Driver-And-Interface-ICs/Brush-DC-Motor-Drivers/A4954.aspx)
A 3A-esben A5995. (https://www.allegromicro.com/en/Products/Motor-Driver-And-Interface-ICs/Brush-DC-Motor-Drivers/A5995.aspx)
A 2A-esben A4954 van. (https://www.allegromicro.com/en/Products/Motor-Driver-And-Interface-ICs/Brush-DC-Motor-Drivers/A4954.aspx)
A 3A-esben A5995. (https://www.allegromicro.com/en/Products/Motor-Driver-And-Interface-ICs/Brush-DC-Motor-Drivers/A5995.aspx)
Cím: Re:Léptetőmotor
Írta: uferi Dátum 2019 április 07, 18:01
Írta: uferi Dátum 2019 április 07, 18:01
Tisztelt fórumtársak!
Akkor pontosítsuk a típust, elkezdem én:
1. ANTAL GÁBOR 2
2. Homovics Miklós 3
3. Devecz Miklós 3-6
4. Török Tamás 3
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen)
8. morvfer7 3
9. roland7 3
10.prinx 4
11.Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
=============================================
Eddig összesen: 55-60 darab + n darab
Aki érintett a litán és változtatna a számokon az legyen szíves frissítse az összeget is!
Akkor pontosítsuk a típust, elkezdem én:
1. ANTAL GÁBOR 2
2. Homovics Miklós 3
3. Devecz Miklós 3-6
4. Török Tamás 3
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen)
8. morvfer7 3
9. roland7 3
10.prinx 4
11.Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
=============================================
Eddig összesen: 55-60 darab + n darab
Aki érintett a litán és változtatna a számokon az legyen szíves frissítse az összeget is!
Cím: Re:Léptetőmotor
Írta: morvfer7 Dátum 2019 április 07, 18:15
Írta: morvfer7 Dátum 2019 április 07, 18:15
Ha meg lehet csinálni nema 17-re, majd ahogy a képen is van, ez felrakható a nema 23-ra, akkor inkább a nema 17-nél maradjunk.
Lehet a Kínaiakkal nem lehet versenyezni árban, itt már megvan a kijelzős verzió is. (https://www.aliexpress.com/item/BIGTREETECH-S42A-42-Stepper-Motor-Closed-Loop-Stepper-SERVO42A-Motor-Driver-Board-Kits-With-OLED-12864/32996565980.html?spm=2114.search0604.3.50.a7a81e18aBMml5&ws_ab_test=searchweb0_0,searchweb201602_2_10065_10068_319_10059_10884_317_10887_10696_321_322_10084_453_10083_454_10103_10618_10304_10307_10820_10821_537_10302_536,searchweb201603_56,ppcSwitch_0&algo_expid=baadb95b-ad5d-4bb9-aba0-87559e45808c-7&algo_pvid=baadb95b-ad5d-4bb9-aba0-87559e45808c)
Lehet a Kínaiakkal nem lehet versenyezni árban, itt már megvan a kijelzős verzió is. (https://www.aliexpress.com/item/BIGTREETECH-S42A-42-Stepper-Motor-Closed-Loop-Stepper-SERVO42A-Motor-Driver-Board-Kits-With-OLED-12864/32996565980.html?spm=2114.search0604.3.50.a7a81e18aBMml5&ws_ab_test=searchweb0_0,searchweb201602_2_10065_10068_319_10059_10884_317_10887_10696_321_322_10084_453_10083_454_10103_10618_10304_10307_10820_10821_537_10302_536,searchweb201603_56,ppcSwitch_0&algo_expid=baadb95b-ad5d-4bb9-aba0-87559e45808c-7&algo_pvid=baadb95b-ad5d-4bb9-aba0-87559e45808c)
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2019 április 07, 18:39
Írta: Miki2 Dátum 2019 április 07, 18:39
Tisztelt fórumtársak!
Akkor pontosítsuk a típust, elkezdem én:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen)
8. morvfer7 3
9. roland7 3
10.prinx 4
11.Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
=============================================
Eddig összesen: 55-60 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Akkor pontosítsuk a típust, elkezdem én:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen)
8. morvfer7 3
9. roland7 3
10.prinx 4
11.Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
=============================================
Eddig összesen: 55-60 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2019 április 07, 18:47
Írta: Miki2 Dátum 2019 április 07, 18:47
Még egy fontos dolog: a 3 amperest kérném.
Cím: Re:Léptetőmotor
Írta: uferi Dátum 2019 április 07, 18:56
Írta: uferi Dátum 2019 április 07, 18:56
Miki, a listára nem iratkoznál fel?(nem látlak a listán...)
Üdv.,
Feri
Üdv.,
Feri
Cím: Re:Léptetőmotor
Írta: morvfer7 Dátum 2019 április 07, 18:58
Írta: morvfer7 Dátum 2019 április 07, 18:58
Ott van a 2. helyen
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2019 április 07, 19:02
Írta: Egyújabbgépépítő Dátum 2019 április 07, 19:02
Ez ugyanaz. Ha megnézed a Github-on még a copyright részt sem vették ki a forrásból.
Ezzel az árral nem lehet versenyezni, lehet érdemes tőlük megrendelni, ha nagyobb menyiséget rendelünk, még vámmal áfával is jó az ár.
Ezzel az árral nem lehet versenyezni, lehet érdemes tőlük megrendelni, ha nagyobb menyiséget rendelünk, még vámmal áfával is jó az ár.
Cím: Re:Léptetőmotor
Írta: uferi Dátum 2019 április 07, 19:26
Írta: uferi Dátum 2019 április 07, 19:26
A gond az, hogy a kínai 2 Amperes max. áramú, nincs galvanikus leválasztás a vezérlőjeleken, illetve a Hall szenzor amit István beépít az egy 11 USD-s eredeti példány, a kínai valószínüleg a kínai megfelőjét építi be. Egyszóval én megbízhatóbnak tartom az István verzióját bár igaz, hogy ez drágább.
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2019 április 07, 19:53
Írta: Egyújabbgépépítő Dátum 2019 április 07, 19:53
Nézelődtem az Allegro hon lapján. 2 db A4950 meghajtót használva 3.5A lehetne a maximum.
Ami a lényeg a firmware nem változik és a kapcsolási rajz is csak minimálisat.
Ami a lényeg a firmware nem változik és a kapcsolási rajz is csak minimálisat.
Cím: Re:Léptetőmotor
Írta: vjanos Dátum 2019 április 07, 22:23
Írta: vjanos Dátum 2019 április 07, 22:23
Tisztelt fórumtársak!
Akkor pontosítsuk a típust, elkezdem én:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen)
8. morvfer7 3
9. roland7 3
10. prinx 4
11. Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
=============================================
Eddig összesen: 59-64 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Akkor pontosítsuk a típust, elkezdem én:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen)
8. morvfer7 3
9. roland7 3
10. prinx 4
11. Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
=============================================
Eddig összesen: 59-64 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Cím: Re:Léptetőmotor
Írta: xt79ipd3 Dátum 2019 április 07, 23:19
Írta: xt79ipd3 Dátum 2019 április 07, 23:19
Tisztelt fórumtársak!
Akkor pontosítsuk a típust, elkezdem én:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen)
8. morvfer7 3
9. roland7 3 (feltételesen)
10. prinx 4
11. Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
=============================================
Eddig összesen: 59-64 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Akkor pontosítsuk a típust, elkezdem én:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen)
8. morvfer7 3
9. roland7 3 (feltételesen)
10. prinx 4
11. Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
=============================================
Eddig összesen: 59-64 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Cím: Re:Léptetőmotor
Írta: gg58bmmp2 Dátum 2019 április 07, 23:29
Írta: gg58bmmp2 Dátum 2019 április 07, 23:29
Tisztelt fórumtársak!
Akkor pontosítsuk a típust, elkezdem én:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen)
8. morvfer7 3
9. roland7 3 (feltételesen)
10. prinx 4
11. Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
18 yeti 4-6 (feltételesen) 3A verzió
=============================================
Eddig összesen: 63-66 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Akkor pontosítsuk a típust, elkezdem én:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen)
8. morvfer7 3
9. roland7 3 (feltételesen)
10. prinx 4
11. Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
18 yeti 4-6 (feltételesen) 3A verzió
=============================================
Eddig összesen: 63-66 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Cím: Re:Léptetőmotor
Írta: dezsoe Dátum 2019 április 07, 23:48
Írta: dezsoe Dátum 2019 április 07, 23:48
Tisztelt fórumtársak!
Akkor pontosítsuk a típust, elkezdem én:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen) 3A verzió
8. morvfer7 3
9. roland7 3 (feltételesen)
10. prinx 4
11. Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
18 yeti 4-6 (feltételesen) 3A verzió
=============================================
Eddig összesen: 63-66 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Akkor pontosítsuk a típust, elkezdem én:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen) 3A verzió
8. morvfer7 3
9. roland7 3 (feltételesen)
10. prinx 4
11. Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
18 yeti 4-6 (feltételesen) 3A verzió
=============================================
Eddig összesen: 63-66 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Cím: Re:Léptetőmotor
Írta: c2nsu773m Dátum 2019 április 08, 06:33
Írta: c2nsu773m Dátum 2019 április 08, 06:33
Tisztelt fórumtársak!
Akkor pontosítsuk a típust, elkezdem én:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3db nema23 3.5A
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen) 3A verzió
8. morvfer7 3
9. roland7 3 (feltételesen)
10. prinx 4
11. Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
18 yeti 4-6 (feltételesen) 3A verzió
=============================================
Eddig összesen: 63-66 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Akkor pontosítsuk a típust, elkezdem én:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3db nema23 3.5A
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen) 3A verzió
8. morvfer7 3
9. roland7 3 (feltételesen)
10. prinx 4
11. Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
18 yeti 4-6 (feltételesen) 3A verzió
=============================================
Eddig összesen: 63-66 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Cím: Re:Léptetőmotor
Írta: prinx Dátum 2019 április 08, 06:40
Írta: prinx Dátum 2019 április 08, 06:40
Tisztelt fórumtársak!
Akkor pontosítsuk a típust, elkezdem én:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3db nema23 3.5A
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen) 3A verzió
8. morvfer7 3
9. roland7 3 (feltételesen)
10. prinx 4db Nema23 3.5A
11. Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
18 yeti 4-6 (feltételesen) 3A verzió
=============================================
Eddig összesen: 63-66 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Akkor pontosítsuk a típust, elkezdem én:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3db nema23 3.5A
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen) 3A verzió
8. morvfer7 3
9. roland7 3 (feltételesen)
10. prinx 4db Nema23 3.5A
11. Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
18 yeti 4-6 (feltételesen) 3A verzió
=============================================
Eddig összesen: 63-66 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2019 április 08, 08:27
Írta: D.Laci Dátum 2019 április 08, 08:27
Tisztelt fórumtársak!
Akkor pontosítsuk a típust, elkezdem én:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3db nema23 3.5A
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen) 3A verzió
8. morvfer7 3
9. roland7 3 (feltételesen)
10. prinx 4db Nema23 3.5A
11. Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
18. yeti 4-6 (feltételesen) 3A verzió
19. D.Laci 3db.
=============================================
Eddig összesen: 61-77 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Akkor pontosítsuk a típust, elkezdem én:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3db nema23 3.5A
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen) 3A verzió
8. morvfer7 3
9. roland7 3 (feltételesen)
10. prinx 4db Nema23 3.5A
11. Jenei László 4-8 (feltételesen)
12. sastas 3
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
18. yeti 4-6 (feltételesen) 3A verzió
19. D.Laci 3db.
=============================================
Eddig összesen: 61-77 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Cím: Re:Léptetőmotor
Írta: 2vkx6unz Dátum 2019 április 08, 08:33
Írta: 2vkx6unz Dátum 2019 április 08, 08:33
Sziasztok!
Ilyen mennyiség mellett már érdemes lesz elgondolkodni a finanszírozési kérdéseken is mert jelentős berüházást igényel ilyen mennyiségben az alkatrészek beszerzése is.
Ilyen mennyiség mellett már érdemes lesz elgondolkodni a finanszírozési kérdéseken is mert jelentős berüházást igényel ilyen mennyiségben az alkatrészek beszerzése is.
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2019 április 08, 08:40
Írta: D.Laci Dátum 2019 április 08, 08:40
Ezen sokat nem gondolkodtam, hisz nyilvánvaló számomra, hogy előre kifizetem.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 április 08, 09:32
Írta: svejk Dátum 2019 április 08, 09:32
No látod, csak volt értelme a múlt heti agitálásnak! :)
Bár Morvfer7 barátunk nélkül nem lett volna az igazi. [#worship]
A felfordulással meg nem kell foglalkozni, hátha még tanulunk is belőle.
Bár Morvfer7 barátunk nélkül nem lett volna az igazi. [#worship]
A felfordulással meg nem kell foglalkozni, hátha még tanulunk is belőle.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 április 08, 10:55
Írta: svejk Dátum 2019 április 08, 10:55
Engem érdekelne ez az "X" érték!
Gondolom már mértél be ilyen visszacsatolt léptetős rendszert is.
Nekem csak 6 Nm-es kínai Klavio-tól vásárolt Lichuan-nal volt tapasztalatom. Konkrét mérésekre idő és megfelelő műszerpark hiányában nem került sor.
(ennél vezérlőnél meg van az az előny, hogy kikapcsolható az encoderes visszacsatolás)
Ugyanazon mechanikán kipróbálva,visszacsatolás nélkül 500-as fordulatszám és 3000 mm/s2 gyorsulás volt elérhető, míg bekapcsolt állapotban 800-as percenkénti fordulatszám és 12000 mm/s2-es gyorsulás.
A lemaradást a fenti okok miatt nem tudtam ekzaktul mérni, a hangja alapján efölött már durva volt a követési hiba.
Mint tudjuk sokan használnak relief marásra Mach3-at.
A Mach3 meg híres arról, hogy a gyorsulást a beállítottól függetlenül önkényesen kezeli, emiatt van a sok érthetetlen lépésvesztés.
Ezzel a visszacsatolt rendszerrel ez a probléma elég jól orvosolható. A problémás részeknél a lemaradás miatt bizonyára nem lesz alakhű a relief, de a lemaradást korrigálja és lehet nem kell eldobni az egész művet, mint egy durva, több mm-t okozó lépésvesztés esetében ami utána végig kíséri a gép munkáját.
Én úgy gondolom, hogy egyáltalán nem haszontalan dolog ez ráadásul fillérekért, illetve utólag is feljavítható egy hagyományos rendszer.
Gondolom már mértél be ilyen visszacsatolt léptetős rendszert is.
Nekem csak 6 Nm-es kínai Klavio-tól vásárolt Lichuan-nal volt tapasztalatom. Konkrét mérésekre idő és megfelelő műszerpark hiányában nem került sor.
(ennél vezérlőnél meg van az az előny, hogy kikapcsolható az encoderes visszacsatolás)
Ugyanazon mechanikán kipróbálva,visszacsatolás nélkül 500-as fordulatszám és 3000 mm/s2 gyorsulás volt elérhető, míg bekapcsolt állapotban 800-as percenkénti fordulatszám és 12000 mm/s2-es gyorsulás.
A lemaradást a fenti okok miatt nem tudtam ekzaktul mérni, a hangja alapján efölött már durva volt a követési hiba.
Mint tudjuk sokan használnak relief marásra Mach3-at.
A Mach3 meg híres arról, hogy a gyorsulást a beállítottól függetlenül önkényesen kezeli, emiatt van a sok érthetetlen lépésvesztés.
Ezzel a visszacsatolt rendszerrel ez a probléma elég jól orvosolható. A problémás részeknél a lemaradás miatt bizonyára nem lesz alakhű a relief, de a lemaradást korrigálja és lehet nem kell eldobni az egész művet, mint egy durva, több mm-t okozó lépésvesztés esetében ami utána végig kíséri a gép munkáját.
Én úgy gondolom, hogy egyáltalán nem haszontalan dolog ez ráadásul fillérekért, illetve utólag is feljavítható egy hagyományos rendszer.
Cím: Re:Léptetőmotor
Írta: sastas Dátum 2019 április 08, 10:59
Írta: sastas Dátum 2019 április 08, 10:59
Tisztelt fórumtársak!
Akkor pontosítsuk a típust:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3db nema23 3.5A
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen) 3A verzió
8. morvfer7 3
9. roland7 3 (feltételesen)
10. prinx 4db Nema23 3.5A
11. Jenei László 4-8 (feltételesen)
12. sastas 3 (+5 feltételesen) Nema23, 3A
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
18. yeti 4-6 (feltételesen) 3A verzió
19. D.Laci 3db.
=============================================
Eddig összesen: 61-82 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Akkor pontosítsuk a típust:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3db nema23 3.5A
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen) 3A verzió
8. morvfer7 3
9. roland7 3 (feltételesen)
10. prinx 4db Nema23 3.5A
11. Jenei László 4-8 (feltételesen)
12. sastas 3 (+5 feltételesen) Nema23, 3A
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
18. yeti 4-6 (feltételesen) 3A verzió
19. D.Laci 3db.
=============================================
Eddig összesen: 61-82 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 április 08, 12:04
Írta: dtb Dátum 2019 április 08, 12:04
Kicsit pontosítsuk már a lehetőségeket, és a tényleges igényt, hogy István tudjon kalkulálni, pontosítani.
Készítettem egy Google táblázatot, a link birtokában bárki szerkesztheti, csak Google fiók kell hozzá. Akinek androidos telefonja van, az ott megadott felhasználónév/jelszó is jó a Google belépéshez.
Feltételezek annyi értelmi szintet, hogy senki nem fogja más beírását módosítani.
Egy próbát megér...
Hall szenzoros léptető vezérlő igény felmérő (https://drive.google.com/file/d/1zmqLByA-ZuM7OHDmlIErfTCUh3VZicr8/view?usp=sharing)
Ha használható, akkor a teljes táblázat helyett elég ennek a linkjét másolgatni.
Készítettem egy Google táblázatot, a link birtokában bárki szerkesztheti, csak Google fiók kell hozzá. Akinek androidos telefonja van, az ott megadott felhasználónév/jelszó is jó a Google belépéshez.
Feltételezek annyi értelmi szintet, hogy senki nem fogja más beírását módosítani.
Egy próbát megér...
Hall szenzoros léptető vezérlő igény felmérő (https://drive.google.com/file/d/1zmqLByA-ZuM7OHDmlIErfTCUh3VZicr8/view?usp=sharing)
Ha használható, akkor a teljes táblázat helyett elég ennek a linkjét másolgatni.
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2019 április 08, 16:43
Írta: Miki2 Dátum 2019 április 08, 16:43
Vess egy pillantást az adatlapomra.
Könnyen beazonosítható vagyok.
Üdv:
Homovics Miklós
(Miki2)
Könnyen beazonosítható vagyok.
Üdv:
Homovics Miklós
(Miki2)
Cím: Re:Léptetőmotor
Írta: korbendallas Dátum 2019 április 09, 08:47
Írta: korbendallas Dátum 2019 április 09, 08:47
Tisztelt fórumtársak!
Akkor pontosítsuk a típust:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3db nema23 3.5A
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen) 3A verzió
8. morvfer7 3
9. roland7 3 (feltételesen)
10. prinx 4db Nema23 3.5A
11. Jenei László 4-8 (feltételesen)
12. sastas 3 (+5 feltételesen) Nema23, 3A
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
18. yeti 4-6 (feltételesen) 3A verzió
19. D.Laci 3db.
20. korbendallas 4db 3.5A verzió
=============================================
Eddig összesen: 65-86 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Akkor pontosítsuk a típust:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3db nema23 3.5A
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen) 3A verzió
8. morvfer7 3
9. roland7 3 (feltételesen)
10. prinx 4db Nema23 3.5A
11. Jenei László 4-8 (feltételesen)
12. sastas 3 (+5 feltételesen) Nema23, 3A
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
18. yeti 4-6 (feltételesen) 3A verzió
19. D.Laci 3db.
20. korbendallas 4db 3.5A verzió
=============================================
Eddig összesen: 65-86 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2019 április 09, 13:41
Írta: zozo Dátum 2019 április 09, 13:41
Az a baj, ez így nem szerkeszthető. Ahhoz előbb be kell hívni a táblázatkezelőbe, menteni, aztán újra megosztani.
Vagy Te is elfelejtetted szerkeszthetővé tenni, majd utána megosztani? :)
Vagy Te is elfelejtetted szerkeszthetővé tenni, majd utána megosztani? :)
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 április 09, 15:03
Írta: dtb Dátum 2019 április 09, 15:03
A megosztási linken én engedélyeztem a szerkeszthetőséget, de valami nem kóser, én is látom.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 április 09, 15:06
Írta: dtb Dátum 2019 április 09, 15:06
Most próbáld, légyszives!
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 április 09, 15:12
Írta: dtb Dátum 2019 április 09, 15:12
Hall szenzoros léptető vezérlő igény felmérő (https://docs.google.com/spreadsheets/d/1Ndj28G4LMsJFrl32Pi2W6Kb_g8uybu9yQgRfLBcijiM/edit?usp=sharing)
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2019 április 09, 16:31
Írta: Miki2 Dátum 2019 április 09, 16:31
Tisztelt fórumtársak!
Akkor pontosítsuk a típust:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db 3.5A NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3db nema23 3.5A
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen) 3A verzió
8. morvfer7 3
9. roland7 3 (feltételesen)
10. prinx 4db Nema23 3.5A
11. Jenei László 4-8 (feltételesen)
12. sastas 3 (+5 feltételesen) Nema23, 3A
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
18. yeti 4-6 (feltételesen) 3A verzió
19. D.Laci 3db.
20. korbendallas 4db 3.5A verzió
=============================================
Eddig összesen: 65-86 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Akkor pontosítsuk a típust:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db 3.5A NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3db nema23 3.5A
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen) 3A verzió
8. morvfer7 3
9. roland7 3 (feltételesen)
10. prinx 4db Nema23 3.5A
11. Jenei László 4-8 (feltételesen)
12. sastas 3 (+5 feltételesen) Nema23, 3A
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
18. yeti 4-6 (feltételesen) 3A verzió
19. D.Laci 3db.
20. korbendallas 4db 3.5A verzió
=============================================
Eddig összesen: 65-86 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2019 április 09, 16:54
Írta: zozo Dátum 2019 április 09, 16:54
Most OK! Használható innentől.[#eljen]
Cím: Re:Léptetőmotor
Írta: dezs Dátum 2019 április 09, 22:21
Írta: dezs Dátum 2019 április 09, 22:21
| 1856 Ma 16:31:17 [6018]
Tisztelt fórumtársak!
Akkor pontosítsuk a típust:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db 3.5A NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3db nema23 3.5A
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen) 3A verzió
8. morvfer7 3
9. roland7 3 (feltételesen)
10. prinx 4db Nema23 3.5A
11. Jenei László 4-8 (feltételesen)
12. sastas 3 (+5 feltételesen) Nema23, 3A
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
18. yeti 4-6 (feltételesen) 3A verzió
19. D.Laci 3db.
20. korbendallas 4db 3.5A verzió
21. dezs 3 db kicsi 3db nagy
=============================================
Eddig összesen: 71-92 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Tisztelt fórumtársak!
Akkor pontosítsuk a típust:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db 3.5A NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3db nema23 3.5A
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen) 3A verzió
8. morvfer7 3
9. roland7 3 (feltételesen)
10. prinx 4db Nema23 3.5A
11. Jenei László 4-8 (feltételesen)
12. sastas 3 (+5 feltételesen) Nema23, 3A
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
18. yeti 4-6 (feltételesen) 3A verzió
19. D.Laci 3db.
20. korbendallas 4db 3.5A verzió
21. dezs 3 db kicsi 3db nagy
=============================================
Eddig összesen: 71-92 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Cím: Re:Léptetőmotor
Írta: dezs Dátum 2019 április 09, 22:26
Írta: dezs Dátum 2019 április 09, 22:26
Kicsit nem nézek oda, és már majdnem lemaradtam a listáról.
Nem nézem minden nap ezt a topic-ot. Lehetne, hogy a listán szereplők kapjanak egy értesítést, amikor a vezérlő rendelhető/előlegezhető állapotba kerül?
Nem nézem minden nap ezt a topic-ot. Lehetne, hogy a listán szereplők kapjanak egy értesítést, amikor a vezérlő rendelhető/előlegezhető állapotba kerül?
Cím: Re:Léptetőmotor
Írta: Dakota25 Dátum 2019 április 09, 22:41
Írta: Dakota25 Dátum 2019 április 09, 22:41
Tisztelt fórumtársak!
Akkor pontosítsuk a típust:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db 3.5A NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3db nema23 3.5A
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen) 3A verzió
8. morvfer7 3
9. roland7 3 (feltételesen)
10. prinx 4db Nema23 3.5A
11. Jenei László 4-8 (feltételesen)
12. sastas 3 (+5 feltételesen) Nema23, 3A
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
18. yeti 4-6 (feltételesen) 3A verzió
19. D.Laci 3db.
20. korbendallas 4db 3.5A verzió
21. dezs 3 db kicsi 3db nagy
22. Dakota25 1db N17/23 3A
=============================================
Eddig összesen: 72-93 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Akkor pontosítsuk a típust:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db 3.5A NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3db nema23 3.5A
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen) 3A verzió
8. morvfer7 3
9. roland7 3 (feltételesen)
10. prinx 4db Nema23 3.5A
11. Jenei László 4-8 (feltételesen)
12. sastas 3 (+5 feltételesen) Nema23, 3A
13. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
14. PSoft 5
15. Amatőr 3 (feltételesen)
16. mex 3
17. vjanos 4-8 (feltételesen) 3A verzió
18. yeti 4-6 (feltételesen) 3A verzió
19. D.Laci 3db.
20. korbendallas 4db 3.5A verzió
21. dezs 3 db kicsi 3db nagy
22. Dakota25 1db N17/23 3A
=============================================
Eddig összesen: 72-93 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 április 09, 23:02
Írta: dtb Dátum 2019 április 09, 23:02
Ide ird be, és ezt a linket másold.Hall szenzoros léptető vezérlő igény felmérő (https://docs.google.com/spreadsheets/d/1Ndj28G4LMsJFrl32Pi2W6Kb_g8uybu9yQgRfLBcijiM/edit?usp=sharing)
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2019 április 10, 06:44
Írta: Egyújabbgépépítő Dátum 2019 április 10, 06:44
Sziasztok!
Tekintélyes mennyiség jött össze.
Mivel úgy tűnik a nagy többség 3A mellett szavaz, úgy gondolom érdemes arra koncentrálni.
Ezt a darabszámot már nem tudom legyártani, egyezkednem kell a megszokott beültetős céggel.
Valamint szeretném módosítani a meglévő PCB-t, leginkább a hűtés lehetőségét kell javítani a 3A miatt.
Már elkezdtem a módosítást, szerintem 1-2 héten belül lesz ár is.
Tekintélyes mennyiség jött össze.
Mivel úgy tűnik a nagy többség 3A mellett szavaz, úgy gondolom érdemes arra koncentrálni.
Ezt a darabszámot már nem tudom legyártani, egyezkednem kell a megszokott beültetős céggel.
Valamint szeretném módosítani a meglévő PCB-t, leginkább a hűtés lehetőségét kell javítani a 3A miatt.
Már elkezdtem a módosítást, szerintem 1-2 héten belül lesz ár is.
Cím: Re:Léptetőmotor
Írta: morvfer7 Dátum 2019 április 10, 11:00
Írta: morvfer7 Dátum 2019 április 10, 11:00
Tisztelt fórumtársak!
Akkor pontosítsuk a típust:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db 3.5A NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3db nema23 3.5A
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen) 3A verzió
8. roland7 3 (feltételesen)
9. prinx 4db Nema23 3.5A
10. Jenei László 4-8 (feltételesen)
11. sastas 3 (+5 feltételesen) Nema23, 3A
12. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
13. PSoft 5
14. Amatőr 3 (feltételesen)
15. mex 3
16. vjanos 4-8 (feltételesen) 3A verzió
17. yeti 4-6 (feltételesen) 3A verzió
18. D.Laci 3db.
19. korbendallas 4db 3.5A verzió
20. dezs 3 db kicsi 3db nagy
21. Dakota25 1db N17/23 3A
=============================================
Eddig összesen: 69-90 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Akkor pontosítsuk a típust:
1. ANTAL GÁBOR 2
2. Homovics Miklós 5 db 3.5A NEMA23 adapterrel
3. Devecz Miklós 3-6
4. Török Tamás 3db nema23 3.5A
5. Szalai György n (feltételesen)
6. dtb 5 (feltételesen)
7. dezsoe 3-6 (feltételesen) 3A verzió
8. roland7 3 (feltételesen)
9. prinx 4db Nema23 3.5A
10. Jenei László 4-8 (feltételesen)
11. sastas 3 (+5 feltételesen) Nema23, 3A
12. uferi 4 (feltételesen) Nema23 3A (A5995 driver)
13. PSoft 5
14. Amatőr 3 (feltételesen)
15. mex 3
16. vjanos 4-8 (feltételesen) 3A verzió
17. yeti 4-6 (feltételesen) 3A verzió
18. D.Laci 3db.
19. korbendallas 4db 3.5A verzió
20. dezs 3 db kicsi 3db nagy
21. Dakota25 1db N17/23 3A
=============================================
Eddig összesen: 69-90 darab + n darab
Aki érintett a listán és változtatna a számokon az legyen szíves frissítse az összeget is!
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 április 10, 12:29
Írta: 4umhue7vh Dátum 2019 április 10, 12:29
Sziasztok! Használ valaki ilyen encoderes léptetőmotor vezérlőt? Elméletileg a Leadshine oldalról kell ketölteni a konfig szoftvert, de ott ilyen jelzésű mincs, tudja valaki mit töltsek le?
(https://hobbicncforum.hu/uploaded_images/2019/04/tn_676pxd3tt22ydvtgqqxq_653.jpg) (https://hobbicncforum.hu/uploaded_images/2019/04/676pxd3tt22ydvtgqqxq_653.jpg)
(https://hobbicncforum.hu/uploaded_images/2019/04/tn_676pxd3tt22ydvtgqqxq_653.jpg) (https://hobbicncforum.hu/uploaded_images/2019/04/676pxd3tt22ydvtgqqxq_653.jpg)
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 április 10, 12:37
Írta: dtb Dátum 2019 április 10, 12:37
Nézd meg a magyar forgalmazónál, a letöltéseknél (klavio)
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 április 10, 14:22
Írta: 4umhue7vh Dátum 2019 április 10, 14:22
ja, próbáltam, van kétirányú kommunikáció de a kapcsolat nem jön létre. Ezer féle variációja, koppintása van ezeknek,de úgy tűnik nem tök egyformák, az rs232 port 3 féle bekötését láttam már leírásokban. Ennél a konkrét változatnál nem láttam sehol milyen progit kell használni, csak próbálkozok.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 április 10, 14:40
Írta: dtb Dátum 2019 április 10, 14:40
Ezt nézted már? Leadshine download (http://www.leadshine.com/Download.aspx?Type=software)
Az oldalon található PDF segít a típus/software beazonosításában.
Az oldalon található PDF segít a típus/software beazonosításában.
Cím: Re:Léptetőmotor
Írta: eduard Dátum 2019 április 10, 16:56
Írta: eduard Dátum 2019 április 10, 16:56
Udv, erdeklodom, hogy mikorra varhato keszlet a smart stepperbol? Erdemes megvarnom, ha par napon belul kellene?
Cím: Re:Léptetőmotor
Írta: svager Dátum 2019 április 10, 17:11
Írta: svager Dátum 2019 április 10, 17:11
Ennek a variometrumos vezérlőnek [#t52p802#] [#2699@adamant] (elvileg)megtalálta a programját.
Cím: Re:Léptetőmotor
Írta: sastas Dátum 2019 április 10, 17:37
Írta: sastas Dátum 2019 április 10, 17:37
Röviden: nem, többet kell várni.
Hosszabban, kb 5 hszel lejebb.
[#t168p6024#]
Hosszabban, kb 5 hszel lejebb.
[#t168p6024#]
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 április 10, 19:33
Írta: 4umhue7vh Dátum 2019 április 10, 19:33
Semmire sem jutottam, majd szét b@sz az ideg. Remélem amit Adamant talált jó lesz, holnap kipróbálom.
Cím: Re:Léptetőmotor
Írta: klaviokft Dátum 2019 április 10, 20:41
Írta: klaviokft Dátum 2019 április 10, 20:41
Sajnos ehhez nem jó a Leadsine szoftwer, hiszen nem az Ő termékük. Elérhető szoftwerrel sajnos nem tudok segíteni, de arra nagyon kényesek a soros portot használó eszközök, hogy milyen soros porttal kell kommunikálni. Az alaplapi port mindíg jól kommunikál, de az USB/RS232 átalakítók nagyon szórnak. Sokfélét kipróbáltunk a Klavióban, de csak egyet találtunk ami minden RS232-es eszközünkkel együtt tud működni. ( cserébe viszont rohadt drága [#conf], ezért nincs is fent a webshopban )
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 április 10, 21:53
Írta: 4umhue7vh Dátum 2019 április 10, 21:53
Az a legnagyobb baj hogy nem tudom a tuti szoftwert, ha meglenne, valahogy kikínlódom, de ez igy nem egyszerű, az lesz a legjobbha végre sikerül, és kiderül hogy nem is tudja azt amit szeretnék.[#conf] Pl, egy 2048 ostású encodert biggyesztettem rá egy 6,5Nm-es Sanyo motorra, ezt szeretném forgatni vele,de kéerdés hogy lehet-e állitani az encoder osztást, valahol azt olvasam hogy 1000-2500 között lehet.Egyépként alaplapi rs232- vel próbálkozok.
Cím: Re:Léptetőmotor
Írta: 4h4344ty Dátum 2019 április 11, 00:09
Írta: 4h4344ty Dátum 2019 április 11, 00:09
A 2Nm-es motorjaim most 55V/3A-el mennek. Érdemes lehet erre
a meghajtásra váltani (40V/3A)? Vagyis a csökkenő erőt ez a rendszer tudja kompenzálni?
a meghajtásra váltani (40V/3A)? Vagyis a csökkenő erőt ez a rendszer tudja kompenzálni?
Cím: Re:Léptetőmotor
Írta: klaviokft Dátum 2019 április 11, 08:30
Írta: klaviokft Dátum 2019 április 11, 08:30
Sajnos az olcsóbb Easy Servos rendszerünkben sem lehet enkóder paramétert állítani. Előre programozott ( 2Nm-es, 3Nm-es ), vagy motorfelismerős rendszerrel ellátott ( 4Nm-es, 6 Nm-es ) vezérlők ezek. Ezért is áruljuk párban együtt. A Leadshine ES-D808-as vezérlőjét lehet paraméterezni, de az Leadshine árban van.
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 április 11, 12:11
Írta: 4umhue7vh Dátum 2019 április 11, 12:11
Hát ezzel nem tudok mit kezdeni, semmivel nem kommunikál.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 április 12, 11:25
Írta: dtb Dátum 2019 április 12, 11:25
Csak hangosan gondolkodok.
A korábbi beírások alapján elég sok darabra lenne igény a hall szenzoros vezérlőből, de költség oldalról nem sokat tudunk.
Van akinek a kisebb, van akinek a nagyobb, és van, akinek a 3.5A verzió lenne az ideális. A költségekről/árról nem sokat tudni, de van egy olyan sejtésem, hogy nem lesz olcsó.
Ha ilyen remek szakemberek készítik az eszközt, mi lenne, ha nem DRIVER-t, hanem CSAK egy jeladót készíttettnénk, ami kiválthatná a nem túl olcsó, és elég érzékeny encodereket.
Egy closed loop-os kinai vezérlő ~$50 körül mozog, esetleg akciós áron ki lehet fogni még olcsóbbat is, ezzel az árral szerintem nem lehet versenyezni.
Szerintetek nem volna jobb megoldás egy 1000-es jel felbontású hall szenzoros encoder "fejlesztése"? Olcsóbb lenne, és bővebb felhasználási lehetőségei lennének, mint az amperfüggő drivernek.
A korábbi beírások alapján elég sok darabra lenne igény a hall szenzoros vezérlőből, de költség oldalról nem sokat tudunk.
Van akinek a kisebb, van akinek a nagyobb, és van, akinek a 3.5A verzió lenne az ideális. A költségekről/árról nem sokat tudni, de van egy olyan sejtésem, hogy nem lesz olcsó.
Ha ilyen remek szakemberek készítik az eszközt, mi lenne, ha nem DRIVER-t, hanem CSAK egy jeladót készíttettnénk, ami kiválthatná a nem túl olcsó, és elég érzékeny encodereket.
Egy closed loop-os kinai vezérlő ~$50 körül mozog, esetleg akciós áron ki lehet fogni még olcsóbbat is, ezzel az árral szerintem nem lehet versenyezni.
Szerintetek nem volna jobb megoldás egy 1000-es jel felbontású hall szenzoros encoder "fejlesztése"? Olcsóbb lenne, és bővebb felhasználási lehetőségei lennének, mint az amperfüggő drivernek.
Cím: Re:Léptetőmotor
Írta: uferi Dátum 2019 április 12, 12:31
Írta: uferi Dátum 2019 április 12, 12:31
Tisztelt fórumtársak!
Hasonlóan csak csak gondolatfuttatásként a véleményem az, hogy ebben a külalakban (ha István azt mondja, hogy a Nema 17-es méretet rá lehet dolgozni gond nélkül a Nema 23-as motorra), illetve a 3,5Amperes verziót gond nélkül lehet használni a kissebb áramú motorokon, akkor szerintem érdemes lenne ezt a projektet végigvinni, mivel a különböző verziók valószínüleg leredukálódnak egyetlen verzióra. A Hall érzékelő a legdrágább alkatrész az alkatrészlistáról, a proci és a léptecsvezérlő ahogy láttam max 5-6 Eurónyi összeg. A jeladó gyártásához szoftware-t kell fejleszteni, amit nem szoktak átalában ingyen megcsinálni...
Javaslatom tehát az lenne, hogy a jeladós projekt az fusson ettől függetlenül és önállóan.
Minden jót, üdv.,
Feri
Hasonlóan csak csak gondolatfuttatásként a véleményem az, hogy ebben a külalakban (ha István azt mondja, hogy a Nema 17-es méretet rá lehet dolgozni gond nélkül a Nema 23-as motorra), illetve a 3,5Amperes verziót gond nélkül lehet használni a kissebb áramú motorokon, akkor szerintem érdemes lenne ezt a projektet végigvinni, mivel a különböző verziók valószínüleg leredukálódnak egyetlen verzióra. A Hall érzékelő a legdrágább alkatrész az alkatrészlistáról, a proci és a léptecsvezérlő ahogy láttam max 5-6 Eurónyi összeg. A jeladó gyártásához szoftware-t kell fejleszteni, amit nem szoktak átalában ingyen megcsinálni...
Javaslatom tehát az lenne, hogy a jeladós projekt az fusson ettől függetlenül és önállóan.
Minden jót, üdv.,
Feri
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 április 12, 12:38
Írta: dtb Dátum 2019 április 12, 12:38
A jeladóhoz miért kell szoftver? Ezt nem értem. Hardveresen ugyanaz, (na jó nem pont, de hasonló) mint az enkóderes jeladók. A, B , Index, vagy ezek bővitett verziói. Rosszul tudom?
Cím: Re:Léptetőmotor
Írta: uferi Dátum 2019 április 12, 14:59
Írta: uferi Dátum 2019 április 12, 14:59
A Hall szenzor ( AS5047D ) adatlapja szerint a választható felbontások a következőekÉ "ABI programmable decimal and binary pulse-count:
500, 400, 300, 200, 100, 50, 25, 8, 512, 256 ppr ", mindezt SPI buszos parancsokkal lehet megcsinálni.
Azt, hogy nem kell programozni, azt értsd úgy, hogy nem kell bele firmware-t írni, de minden egyes bekapcsoláskor SPI buszon konfigurálni kell, illetve vannak OTP regiszterei is (például a null-helyzet koordinátája) amit ugyancsk SPI buszon történik.
Ha nincs ott egy mikrovezérlő akkor ki fogja elvégezni ezeket a beállításokat? A Hall szenzor nem fogja kitalálni, hogz neked 500, 400, 300, 200, 100, 50, 25, 8, 512, 256 impulzus per fordulatra van szükséged az adott alaklmazásban... (ezeket tudja az IC)
500, 400, 300, 200, 100, 50, 25, 8, 512, 256 ppr ", mindezt SPI buszos parancsokkal lehet megcsinálni.
Azt, hogy nem kell programozni, azt értsd úgy, hogy nem kell bele firmware-t írni, de minden egyes bekapcsoláskor SPI buszon konfigurálni kell, illetve vannak OTP regiszterei is (például a null-helyzet koordinátája) amit ugyancsk SPI buszon történik.
Ha nincs ott egy mikrovezérlő akkor ki fogja elvégezni ezeket a beállításokat? A Hall szenzor nem fogja kitalálni, hogz neked 500, 400, 300, 200, 100, 50, 25, 8, 512, 256 impulzus per fordulatra van szükséged az adott alaklmazásban... (ezeket tudja az IC)
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2019 április 12, 15:22
Írta: Szalai György Dátum 2019 április 12, 15:22
Egyre kevésbé szimpatikus. Túl van ez bonyolítva.
Miért nem tudja egy ilyen kis eszköz megjegyezni a beállításokat és utána egyszerűen csak tenni a dolgát örök időkig?
Miért nem tudja egy ilyen kis eszköz megjegyezni a beállításokat és utána egyszerűen csak tenni a dolgát örök időkig?
Cím: Re:Léptetőmotor
Írta: uferi Dátum 2019 április 12, 18:55
Írta: uferi Dátum 2019 április 12, 18:55
Pillanat, pillanat, a programot már mecsinálták, működik a léptecs vezérlése, paraméterek elmentése, PID értékek megjegyzése, kalibrációs értékek elmentése és megjegyzése, DE mindez a léptetőmotor zárthurkú vezérlésére igaz nem pedig más alkalmazásra (jeladó)! Meg lehet csinálni egy másik projektben a jeladót de ez plusszmunkát fog igényelni (firmware-fejlesztés).
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2019 április 12, 20:59
Írta: Szalai György Dátum 2019 április 12, 20:59
Ééértem. Köszi.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 április 12, 23:52
Írta: dtb Dátum 2019 április 12, 23:52
Szia, köszi a magyarázatot, én másképp gondoltam a működését. Nem vagyok ebben a témakörben gyakorlott[/u], ezért elolvastam a hivatkozott AS5047D manualt (http://pdf1.alldatasheet.com/datasheet-pdf/view/621651/AMSCO/AS5047D.html), de nem lettem tőle okosabb. A manualban leírják, hogy ki lehet választani a szükséges interfész felületet, ebből az egyik az ABI, amikor is az A, B, I lábakon közvetlenül megjelenik az incrementális jel, az én értelmezésem szerint ehhez nem kell SPI.
A manual másik része taglalja az OTP memóriát "
A manual végefelé pedig leírja, hogy hogyan kell felprogramozni:
"
Tehát én összességében ebből azt okoskodtam ki, hogy minimális hardver építéssel lehetne egy fix encoderfelbontású jeladót készíteni,de akkor ezek szerint valamit rosszul értelmeztem.
A manual másik része taglalja az OTP memóriát "
Kód Kijelölés
Non-Volatile Registers (OTP) A nonvolatile memory (One-Time Programmable) is used store the zero position of the magnet and custom settings", ami nem felejtős, ha jól értelmezem, vagyis csak egyszer kell megcsinálni. (mondjuk a mágnes kalibrálása is itt van,..hmmmm)A manual végefelé pedig leírja, hogy hogyan kell felprogramozni:
"
Kód Kijelölés
Burn and Verification of the OTP Memory
Step-by-step procedure to permanently program the
non-volatile memory (OTP)"Tehát én összességében ebből azt okoskodtam ki, hogy minimális hardver építéssel lehetne egy fix encoderfelbontású jeladót készíteni,de akkor ezek szerint valamit rosszul értelmeztem.
Cím: Re:Léptetőmotor
Írta: uferi Dátum 2019 április 14, 10:11
Írta: uferi Dátum 2019 április 14, 10:11
Szia!
Bocs, hogy nem válaszoltam hamarabb, de a tegnapi nap LoneWolfnál voltam böngészni/vásárolni és elment az oda-vissz úttal az egész nap...
Ahogy írtad az előző hozzászólásban "minimális hardver építés" szükséges az IC konfigurálásához. Ez lehet egy SPI buszos interfész is (és persze minden bitet a regiszterekből tudnod kell, hogy milyen funkcióért felel), vagy persze egy mikrovezérlő akár(2-3 Eurós áron már "izmos" példány vásárolható). A mikrovezérlős megoldásnak szerintem egyértelmü előnye, hogy a Hall szenzor regisztereit (OTP) soft módon használhatja, vagyis nem szükséges végleges tartalomra írni, a mikrovezérlő minden reszetkor vagy betáp eseménynél a belső eepromból (mikrovezérlő eeprom!!!) beírogatja a regisztereket, tehát bármikor újratanítható és konfigurálható, ha viszont egy programozóval "véglegesre" írod az OTP regisztereket akkor azokat nem tudod már átírni, ha változtatni akarsz, akkor IC-t kell cserélni! (ami kb. 11USD ahogy Istán mondta)
Eredetileg nyíltforráskódja volt a SmartStepperes projektnek, meg kellene kérdezni Istvántól, hogy a jelenlegi "stabil" verzió forráskódja hozzáférhető-e, lehet, hogy könnyen átírható lenne jeladónak.
Üdv.,
Feri
Bocs, hogy nem válaszoltam hamarabb, de a tegnapi nap LoneWolfnál voltam böngészni/vásárolni és elment az oda-vissz úttal az egész nap...
Ahogy írtad az előző hozzászólásban "minimális hardver építés" szükséges az IC konfigurálásához. Ez lehet egy SPI buszos interfész is (és persze minden bitet a regiszterekből tudnod kell, hogy milyen funkcióért felel), vagy persze egy mikrovezérlő akár(2-3 Eurós áron már "izmos" példány vásárolható). A mikrovezérlős megoldásnak szerintem egyértelmü előnye, hogy a Hall szenzor regisztereit (OTP) soft módon használhatja, vagyis nem szükséges végleges tartalomra írni, a mikrovezérlő minden reszetkor vagy betáp eseménynél a belső eepromból (mikrovezérlő eeprom!!!) beírogatja a regisztereket, tehát bármikor újratanítható és konfigurálható, ha viszont egy programozóval "véglegesre" írod az OTP regisztereket akkor azokat nem tudod már átírni, ha változtatni akarsz, akkor IC-t kell cserélni! (ami kb. 11USD ahogy Istán mondta)
Eredetileg nyíltforráskódja volt a SmartStepperes projektnek, meg kellene kérdezni Istvántól, hogy a jelenlegi "stabil" verzió forráskódja hozzáférhető-e, lehet, hogy könnyen átírható lenne jeladónak.
Üdv.,
Feri
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 április 14, 11:14
Írta: dtb Dátum 2019 április 14, 11:14
Nálam féllábú a történet, az elektronikát ilyen szinten nem ismerem, (max alapfogalmakat). A forráskód elérhető, értelmesen, logikusan megírt, emészthető, de ez ugye arduinóra lett irva, nem tudom, ez így mennyire kompatibilis más micro kontrollerekkel.
Az egész történetnek igazából akkor van értelme, ha az így kapott encoder jeleit tudja kezelni az olcsó kínai closed loop-os driver, tehát elsőként ezt a kérdést kellene rövidre zárni szerintem.
Mielőtt bárki nekiállna a kínait fikázni, nekem kétfajta (2Nm) olcsó closed loop-os vezérlő+motor párosom is van, december óta használom őket, és bár mindennel csak ennyi gond lenne (semmi). Itt maximum még az marad nyitott kérdésként, hogy a kínai driver mennyire autoconfig, mert bár a leírás szerint tudja ezt a funkciót, de élesben még nem teszteltem, mert nincs mivel.
Az egész történetnek igazából akkor van értelme, ha az így kapott encoder jeleit tudja kezelni az olcsó kínai closed loop-os driver, tehát elsőként ezt a kérdést kellene rövidre zárni szerintem.
Mielőtt bárki nekiállna a kínait fikázni, nekem kétfajta (2Nm) olcsó closed loop-os vezérlő+motor párosom is van, december óta használom őket, és bár mindennel csak ennyi gond lenne (semmi). Itt maximum még az marad nyitott kérdésként, hogy a kínai driver mennyire autoconfig, mert bár a leírás szerint tudja ezt a funkciót, de élesben még nem teszteltem, mert nincs mivel.
Cím: Re:Léptetőmotor
Írta: klaviokft Dátum 2019 április 16, 09:14
Írta: klaviokft Dátum 2019 április 16, 09:14
Szia,
Kicsit utánajártam, ( bár nem forgalmazzuk )hivatalosan csak az új típusú vezérlőt lehet bizonyos szinten programozni, a típusa CL-HSS86. A régi típusnak nem nyitott a programozási lehetősége, csak a gyárban használják. ( A kontakt gyártónk még magyarországra nem adott el új típusú vezérlőt ebből a sorozatból. [#wilting] )
(https://hobbicncforum.hu/uploaded_images/2019/04/tn_h28kb9y0nja94fd50y_5432.jpg) (https://hobbicncforum.hu/uploaded_images/2019/04/h28kb9y0nja94fd50y_5432.jpg)
Kicsit utánajártam, ( bár nem forgalmazzuk )hivatalosan csak az új típusú vezérlőt lehet bizonyos szinten programozni, a típusa CL-HSS86. A régi típusnak nem nyitott a programozási lehetősége, csak a gyárban használják. ( A kontakt gyártónk még magyarországra nem adott el új típusú vezérlőt ebből a sorozatból. [#wilting] )
(https://hobbicncforum.hu/uploaded_images/2019/04/tn_h28kb9y0nja94fd50y_5432.jpg) (https://hobbicncforum.hu/uploaded_images/2019/04/h28kb9y0nja94fd50y_5432.jpg)
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2019 április 30, 15:52
Írta: Egyújabbgépépítő Dátum 2019 április 30, 15:52
Folytatva a Smart Stepper történetét.
Elkészült egy újabb változat, az A4954 helyett 2db A4950 került beépítésre.
Ahogy vártam kitűnően működik, a firmware minden változtatása nélkül 3.3 A a maximum beállítható áram.
Ezt fel lehet vinni 3.5 A -re, de akkor az áramérzékelő ellenállást cserélni kell és a szoftvert is módosítani kell.
Megváltoztattam az alkatrészek elhelyezését, most már majdnem minden a motor oldalon található.
Ennek az az előnye, hogy lehet egy hűtőbordát ragasztani az A4950 hűtésére, de hűtőborda nélkül is sokkal jobb a hűtés.
Valamint nyomtattam kétféle felfogatót, az egyik NEMA17 a másik NEMA23 motorhoz.
A NEMA17 kicsit ormótlan, ezen még gondolkodni kell. Ezekre a tartókra ventilátor is csavarozható, nagyobb áramnál szükség van kényszerhűtésre.
(https://hobbicncforum.hu/uploaded_images/2019/04/tn_wwa5tyys3b2h0bcdwieu_450.jpg) (https://hobbicncforum.hu/uploaded_images/2019/04/wwa5tyys3b2h0bcdwieu_450.jpg) (https://hobbicncforum.hu/uploaded_images/2019/04/tn_szjkmj90x7qjfd8fvx8p8_450.jpg) (https://hobbicncforum.hu/uploaded_images/2019/04/szjkmj90x7qjfd8fvx8p8_450.jpg) (https://hobbicncforum.hu/uploaded_images/2019/04/tn_fjthsgcc8vk4jck89d3tm_450.jpg) (https://hobbicncforum.hu/uploaded_images/2019/04/fjthsgcc8vk4jck89d3tm_450.jpg) (https://hobbicncforum.hu/uploaded_images/2019/04/tn_9gdye702ws99f62xxntxy_450.jpg) (https://hobbicncforum.hu/uploaded_images/2019/04/9gdye702ws99f62xxntxy_450.jpg)
Elkészült egy újabb változat, az A4954 helyett 2db A4950 került beépítésre.
Ahogy vártam kitűnően működik, a firmware minden változtatása nélkül 3.3 A a maximum beállítható áram.
Ezt fel lehet vinni 3.5 A -re, de akkor az áramérzékelő ellenállást cserélni kell és a szoftvert is módosítani kell.
Megváltoztattam az alkatrészek elhelyezését, most már majdnem minden a motor oldalon található.
Ennek az az előnye, hogy lehet egy hűtőbordát ragasztani az A4950 hűtésére, de hűtőborda nélkül is sokkal jobb a hűtés.
Valamint nyomtattam kétféle felfogatót, az egyik NEMA17 a másik NEMA23 motorhoz.
A NEMA17 kicsit ormótlan, ezen még gondolkodni kell. Ezekre a tartókra ventilátor is csavarozható, nagyobb áramnál szükség van kényszerhűtésre.
(https://hobbicncforum.hu/uploaded_images/2019/04/tn_wwa5tyys3b2h0bcdwieu_450.jpg) (https://hobbicncforum.hu/uploaded_images/2019/04/wwa5tyys3b2h0bcdwieu_450.jpg) (https://hobbicncforum.hu/uploaded_images/2019/04/tn_szjkmj90x7qjfd8fvx8p8_450.jpg) (https://hobbicncforum.hu/uploaded_images/2019/04/szjkmj90x7qjfd8fvx8p8_450.jpg) (https://hobbicncforum.hu/uploaded_images/2019/04/tn_fjthsgcc8vk4jck89d3tm_450.jpg) (https://hobbicncforum.hu/uploaded_images/2019/04/fjthsgcc8vk4jck89d3tm_450.jpg) (https://hobbicncforum.hu/uploaded_images/2019/04/tn_9gdye702ws99f62xxntxy_450.jpg) (https://hobbicncforum.hu/uploaded_images/2019/04/9gdye702ws99f62xxntxy_450.jpg)
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2019 április 30, 16:42
Írta: Miki2 Dátum 2019 április 30, 16:42
Azért lassan kialakúl a végleges verzió.
Mikorra tervezed, hogy árat is tudsz mondani.
Várom már a kis ceruzahegyezőm átalakítására az első darabokat.
Mikorra tervezed, hogy árat is tudsz mondani.
Várom már a kis ceruzahegyezőm átalakítására az első darabokat.
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2019 április 30, 16:51
Írta: Egyújabbgépépítő Dátum 2019 április 30, 16:51
Most kaptam meg az ajánlatot a beültető cégtől.
Még átnézem és jelzem.
Viszont szeretném ha valaki még tesztelné mielőtt elindul a gyártás.
Még átnézem és jelzem.
Viszont szeretném ha valaki még tesztelné mielőtt elindul a gyártás.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 április 30, 19:00
Írta: dtb Dátum 2019 április 30, 19:00
Szuper! [#taps][#taps][#taps] Épp ma volt eszembe, hogy vajon hogy áll a projekt, mert nagy a csend :-)
A képeket nézegetve nekem eszembe jutott valami. Léteznek olyan projektek, ahol Android+Arduino párossal remek, működő DRO-kat csinálnak. Ennek a készülő kütyünek esetleg ki lehet tenni elérhető (csatlakoztatható) formában az ABI jeleket? Ez esetben akár még DRO-t is lehetne hozzá csatlakoztatni!
A képeket nézegetve nekem eszembe jutott valami. Léteznek olyan projektek, ahol Android+Arduino párossal remek, működő DRO-kat csinálnak. Ennek a készülő kütyünek esetleg ki lehet tenni elérhető (csatlakoztatható) formában az ABI jeleket? Ez esetben akár még DRO-t is lehetne hozzá csatlakoztatni!
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2019 április 30, 19:59
Írta: Egyújabbgépépítő Dátum 2019 április 30, 19:59
Nem fér el több csatlakozó.
De...
Ha megnézed USB-n vagy soros vonalon most is lekérhető az aktuális pozíció.
A szoftver módosításával szerintem megoldható a folyamatos
pozíció kimenet.
De...
Ha megnézed USB-n vagy soros vonalon most is lekérhető az aktuális pozíció.
A szoftver módosításával szerintem megoldható a folyamatos
pozíció kimenet.
Cím: Re:Léptetőmotor
Írta: phff55j06 Dátum 2019 április 30, 23:06
Írta: phff55j06 Dátum 2019 április 30, 23:06
Egy 4A fázisáramú 3,2V fázisfeszültségű (3Nm) léptetőmotorhoz keresek tápegységet. Milyen feszültségű és teljesítményűt kell választani a maximális nyomatékú működéshez? A kapcsolóüzemű vagy a transzformátoros a megfelelőbb?
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2019 április 30, 23:11
Írta: jani300 Dátum 2019 április 30, 23:11
A meghajtó feszültség maximumánál nagyobb feszültségűt semmiképpen .
Csak arra céloznék hogy a kérdés feltevés is hiányos tartalmú .
Csak arra céloznék hogy a kérdés feltevés is hiányos tartalmú .
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2019 április 30, 23:47
Írta: jani300 Dátum 2019 április 30, 23:47
Na jó , írd meg milyen léptetőmotor vezérlőt választanál .
40-80 volt körüli max feszültségűek vannak , ahhoz kell tápot választani utána .
Mondjuk egy DM 860 vezérlő talán jó lehet .
A hozzászólás alapján kezdőnek látszol ,nem akartalak megsérteni .
40-80 volt körüli max feszültségűek vannak , ahhoz kell tápot választani utána .
Mondjuk egy DM 860 vezérlő talán jó lehet .
A hozzászólás alapján kezdőnek látszol ,nem akartalak megsérteni .
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 május 01, 00:02
Írta: dtb Dátum 2019 május 01, 00:02
Hát ha értenék hozzá... [#kacsint] ... én biztos rátenném még azt az ABI kimenetet!
(arról nem is beszélve, hogy az eszmei/piaci értékét is növeli, nem is kicsit!!!)
(arról nem is beszélve, hogy az eszmei/piaci értékét is növeli, nem is kicsit!!!)
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2019 május 01, 00:59
Írta: B.Zoltán Dátum 2019 május 01, 00:59
Szinte ugyan ilyen adatokkal rendelkező 3Nm motorom hajtja az esztergám vezérorsóját.
32 Voltos trafóról egyenirányítón keresztül, alapterheléssel 42v egyenfeszültségre töltődik a 10000uF kondi.
Vezérlő most 2M542, vagy DM556 is lehetne, 800-as fordulaton 1,5 menetet vágva, több mint 600-on forog a léptetőmotor, és nem fogyaszt még 60 Wattot sem.
Én a 3Nm-es motort 120 Watt hálózatról felvett teljesítményig sikerült megterhelni.
Ettől sokkal nagyobb teljesítményű tápegység fölösleges, ráadású ez csak szakaszos terhelés általában.
Előttem is írták, ha olyan vezérlőt használsz, akkor lehet 70-80 Volt közé menni a feszültséggel, de szerintem teljesítményben nem kell nagyobb, csak a motorod magasabb fordulaton is nagyobb nyomatékot ad.
32 Voltos trafóról egyenirányítón keresztül, alapterheléssel 42v egyenfeszültségre töltődik a 10000uF kondi.
Vezérlő most 2M542, vagy DM556 is lehetne, 800-as fordulaton 1,5 menetet vágva, több mint 600-on forog a léptetőmotor, és nem fogyaszt még 60 Wattot sem.
Én a 3Nm-es motort 120 Watt hálózatról felvett teljesítményig sikerült megterhelni.
Ettől sokkal nagyobb teljesítményű tápegység fölösleges, ráadású ez csak szakaszos terhelés általában.
Előttem is írták, ha olyan vezérlőt használsz, akkor lehet 70-80 Volt közé menni a feszültséggel, de szerintem teljesítményben nem kell nagyobb, csak a motorod magasabb fordulaton is nagyobb nyomatékot ad.
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2019 május 01, 01:09
Írta: jani300 Dátum 2019 május 01, 01:09
Jó ez a hozzászólás , ilyen részletes , gyakorlati adatokkal bíró hozzászólás ritka mostanában . [#eljen]
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 május 01, 11:06
Írta: svejk Dátum 2019 május 01, 11:06
Az ajánlott tápfeszültségre van egy jó közelítő képlet.
A léptetőmotor tekercs induktivitásának a négyzetgyöke szorozva 32-vel.
(az induktivitást mH-ben kell a képletbe helyezni)
A tápegység pedig le tudja adni a motor áramának a kb. 70%-át.
A léptetőmotor tekercs induktivitásának a négyzetgyöke szorozva 32-vel.
(az induktivitást mH-ben kell a képletbe helyezni)
A tápegység pedig le tudja adni a motor áramának a kb. 70%-át.
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2019 május 01, 11:11
Írta: Egyújabbgépépítő Dátum 2019 május 01, 11:11
Ne haragudj de nem értem miért növelné az értékét.
A reáli felhasználási terület: 3D nyomtatók, lézer garnírozók és kisebb CNC gépek.
Ha megnézed a használható parancsokat (https://github.com/Misfittech/nano_stepper), nemcsak az aktuális pozíciót lehet lekérdezni, hanem kiadhatsz move parancsot soros porton.
Így nem csak step/dir üzemmódban használhatod.
És amint írtam meglehetősen tele van a panel, nem igazán férne el rajta még 4 db csatlakozási pont.
És természetesen hogy használni tudd az ABI kimenetet, módosítani kell a firmware-t.
A reáli felhasználási terület: 3D nyomtatók, lézer garnírozók és kisebb CNC gépek.
Ha megnézed a használható parancsokat (https://github.com/Misfittech/nano_stepper), nemcsak az aktuális pozíciót lehet lekérdezni, hanem kiadhatsz move parancsot soros porton.
Így nem csak step/dir üzemmódban használhatod.
És amint írtam meglehetősen tele van a panel, nem igazán férne el rajta még 4 db csatlakozási pont.
És természetesen hogy használni tudd az ABI kimenetet, módosítani kell a firmware-t.
Cím: Re:Léptetőmotor
Írta: 3m9kaxws5 Dátum 2019 május 02, 12:24
Írta: 3m9kaxws5 Dátum 2019 május 02, 12:24
Sziasztok.
van 2db Nema23, 2.1Nm, 2.8A motorom milyen vezérlőt ajánlanátok hozzá ha lézert gravírozót szeretnék építeni.
van 2db Nema23, 2.1Nm, 2.8A motorom milyen vezérlőt ajánlanátok hozzá ha lézert gravírozót szeretnék építeni.
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2019 május 02, 16:53
Írta: B.Zoltán Dátum 2019 május 02, 16:53
DM542 vezérlőnél én nem vennék drágábbat.
A esztergám vezérorsóját ugyan úgy meghajtja 650 ford/perccel, mint ami dupla annyiba kerül.
Gondolom a lézerednek is megfelelne.
Persze vannak ettől olcsóbbak is a 3D nyomtatóké, de azt nem tudom, hogy a 2A körüli áramával szóba jöhet-e.
DM542 driver (https://www.ebay.com/itm/DM542-Stepper-Motor-Driver-For-57-86-Series-2-phase-Digital-Stepper-Motor-Driver/143003169217?hash=item214ba731c1:g:6dQAAOSw4Ldba6nr)
Kereshetsz még szimpatikusabb eladót is, van 100%-os is.
A esztergám vezérorsóját ugyan úgy meghajtja 650 ford/perccel, mint ami dupla annyiba kerül.
Gondolom a lézerednek is megfelelne.
Persze vannak ettől olcsóbbak is a 3D nyomtatóké, de azt nem tudom, hogy a 2A körüli áramával szóba jöhet-e.
DM542 driver (https://www.ebay.com/itm/DM542-Stepper-Motor-Driver-For-57-86-Series-2-phase-Digital-Stepper-Motor-Driver/143003169217?hash=item214ba731c1:g:6dQAAOSw4Ldba6nr)
Kereshetsz még szimpatikusabb eladót is, van 100%-os is.
Cím: Re:Léptetőmotor
Írta: 3m9kaxws5 Dátum 2019 május 02, 20:11
Írta: 3m9kaxws5 Dátum 2019 május 02, 20:11
köszönöm szépen.
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2019 május 03, 21:04
Írta: Egyújabbgépépítő Dátum 2019 május 03, 21:04
Ma sikerült egyezkedni a beültetéssel kapcsolatban.
Ha legalább 50db -ot megrendelünk 13500,-Ft lenne darabja.
Ebben egy komplett beültetett meghajtó felprogramozva és 1 db mágnes van.
A NYÁK természetesen Kínában készül.
Ha legalább 50db -ot megrendelünk 13500,-Ft lenne darabja.
Ebben egy komplett beültetett meghajtó felprogramozva és 1 db mágnes van.
A NYÁK természetesen Kínában készül.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 május 03, 22:50
Írta: dtb Dátum 2019 május 03, 22:50
Én akkor 4db Nema23-as verziót fixálok.
Viszont lenne egy javaslatom/kérésem.
Akiknek van nagyobb kapacitása 3D nyomtatásra, egyuttal nem nyomtatná ki a szükséges mennyiségű kereteket? Természetesen nem ingyen gondoltam, és nem tudom, ténylegesen hány darabra lenne igény, de hátha másnak is lenne ilyen igénye.
Tehát igazából kellene 4db vezérlő, és 4 darab keret.
Viszont lenne egy javaslatom/kérésem.
Akiknek van nagyobb kapacitása 3D nyomtatásra, egyuttal nem nyomtatná ki a szükséges mennyiségű kereteket? Természetesen nem ingyen gondoltam, és nem tudom, ténylegesen hány darabra lenne igény, de hátha másnak is lenne ilyen igénye.
Tehát igazából kellene 4db vezérlő, és 4 darab keret.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2019 május 03, 23:26
Írta: PSoft Dátum 2019 május 03, 23:26
Ha odáig jut a projekt, nem látom akadályát, hogy "beszálljak" a keretek nyomtatásába.
Persze akkor, ha István is bólint rá,és rendelkezésre bocsájtja a munka file-t.
Persze akkor, ha István is bólint rá,és rendelkezésre bocsájtja a munka file-t.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2019 május 04, 08:21
Írta: s7manbs8 Dátum 2019 május 04, 08:21
Mekkorák a méretek ?
Nekem is van szabad kapacitásom nyomtatásra.
Nekem is van szabad kapacitásom nyomtatásra.
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2019 május 04, 08:26
Írta: Egyújabbgépépítő Dátum 2019 május 04, 08:26
Nagyon örülök ha van aki vállalkozik a nyomtatásra.
Természetesen mindent megosztok ami szükséges.
Sőt jó lenne ha van még ötlet hogyan lehetne jobb NEMA23 adaptert nyomtatni.
Szerintem érdemes lenne egy külön topikot kérni a témának.
Természetesen mindent megosztok ami szükséges.
Sőt jó lenne ha van még ötlet hogyan lehetne jobb NEMA23 adaptert nyomtatni.
Szerintem érdemes lenne egy külön topikot kérni a témának.
Cím: Re:Léptetőmotor
Írta: Miki2 Dátum 2019 május 04, 15:51
Írta: Miki2 Dátum 2019 május 04, 15:51
Kérek (egyenlőre) 2 db-ot.
NEMA23 adapterrel, 3,5 A-es terhelhetőséggel és valamilyen magyar nyelvű leírással. Olyan egyszerű dolgokra gondolok, mint pl. a ragasztó típusa a mágnes ragasztásához, és egy egyszerű manuál a vezérlő beállításához, bekötéséhez.
Adataim a nevem alatt.
NEMA23 adapterrel, 3,5 A-es terhelhetőséggel és valamilyen magyar nyelvű leírással. Olyan egyszerű dolgokra gondolok, mint pl. a ragasztó típusa a mágnes ragasztásához, és egy egyszerű manuál a vezérlő beállításához, bekötéséhez.
Adataim a nevem alatt.
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2019 május 04, 16:31
Írta: D.Laci Dátum 2019 május 04, 16:31
https://docs.google.com/spreadsheets/d/1Ndj28G4LMsJFrl32Pi2W6Kb_g8uybu9yQgRfLBcijiM/edit#gid=1285449047
Tartom a 3db.
Tartom a 3db.
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2019 május 04, 16:51
Írta: Egyújabbgépépítő Dátum 2019 május 04, 16:51
Már kértem a rendszergazdát, hogy kapjon egy új témát a SmartStepper számára.
Mindenkit arra kérek, ebben a táblázatban (https://docs.google.com/spreadsheets/d/1Ndj28G4LMsJFrl32Pi2W6Kb_g8uybu9yQgRfLBcijiM/edit#gid=1285449047) erősítse meg igényét.
Lehetőleg a darabszám háttérszínét mondjuk zöldre változtatva.
A gyártás 31 munkanap, 6 hét miután tisztázódott a darabszám.
Mivel meglehetősen nagy összegről van szó, nem tudom megfinanszírozni.
Amint tisztázódik a darabszám előreutalást fogok kérni.
A gyártás indításához nekem is előre kell fizetnem, jelentős kedvezményt kaptunk, de az alkatrészek képviselik a költségek jelentős részét.
Mindenkit arra kérek, ebben a táblázatban (https://docs.google.com/spreadsheets/d/1Ndj28G4LMsJFrl32Pi2W6Kb_g8uybu9yQgRfLBcijiM/edit#gid=1285449047) erősítse meg igényét.
Lehetőleg a darabszám háttérszínét mondjuk zöldre változtatva.
A gyártás 31 munkanap, 6 hét miután tisztázódott a darabszám.
Mivel meglehetősen nagy összegről van szó, nem tudom megfinanszírozni.
Amint tisztázódik a darabszám előreutalást fogok kérni.
A gyártás indításához nekem is előre kell fizetnem, jelentős kedvezményt kaptunk, de az alkatrészek képviselik a költségek jelentős részét.
Cím: Re:Léptetőmotor
Írta: MoparMan Dátum 2019 május 04, 17:55
Írta: MoparMan Dátum 2019 május 04, 17:55
Vigyétek át ide a témát: [#t263#] [#kacsint]
Cím: Re:Léptetőmotor
Írta: uhf57gbx7 Dátum 2019 május 05, 23:34
Írta: uhf57gbx7 Dátum 2019 május 05, 23:34
Sziasztok !
Kérdésem lenne H2 CNC controllerhez Milyen motrot tudok használni már mint típusra amit maximálissan elbir . Nekem kb 2,5 3 Nm kellene .És ugyebár elérhető áron .
Ha valakinek van szivesen meg is venném .
Kérdésem lenne H2 CNC controllerhez Milyen motrot tudok használni már mint típusra amit maximálissan elbir . Nekem kb 2,5 3 Nm kellene .És ugyebár elérhető áron .
Ha valakinek van szivesen meg is venném .
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 május 11, 20:37
Írta: 4umhue7vh Dátum 2019 május 11, 20:37
Egy kis érdekesség. Itt ez a motor, kicsit megtévesztő adattáblával, a neten semmit nem találni róla.
Akár mi is van ráírva ez egy bipoláris léptetőmotor,kipróbáltam egy DM860 veezérlővel 48v-ról 10perc után tűz forró. Még jó hogy nem volt itthon 220-as vezérlőm.[#conf] Egyépként 40v körüli feszről jól müködik, kb 4,5 Nm lehet a nyomatéka.
(https://hobbicncforum.hu/uploaded_images/2019/05/tn_aq8yy5xgwhucj4097it9_653.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/aq8yy5xgwhucj4097it9_653.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/tn_t7325mvuep4hq0c5g3_653.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/t7325mvuep4hq0c5g3_653.jpg)
Akár mi is van ráírva ez egy bipoláris léptetőmotor,kipróbáltam egy DM860 veezérlővel 48v-ról 10perc után tűz forró. Még jó hogy nem volt itthon 220-as vezérlőm.[#conf] Egyépként 40v körüli feszről jól müködik, kb 4,5 Nm lehet a nyomatéka.
(https://hobbicncforum.hu/uploaded_images/2019/05/tn_aq8yy5xgwhucj4097it9_653.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/aq8yy5xgwhucj4097it9_653.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/tn_t7325mvuep4hq0c5g3_653.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/t7325mvuep4hq0c5g3_653.jpg)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 május 12, 13:00
Írta: 000000000 Dátum 2019 május 12, 13:00
"Akár mi is van ráírva ez egy bipoláris léptetőmotor"
Miért???? Áttkercselted 2 fázisúra az eredeti szervó motort?
Miért???? Áttkercselted 2 fázisúra az eredeti szervó motort?
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 május 12, 14:37
Írta: 4umhue7vh Dátum 2019 május 12, 14:37
Nem , nem ez igy gyári.
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 május 12, 14:41
Írta: 4umhue7vh Dátum 2019 május 12, 14:41
ez a belseje
(https://hobbicncforum.hu/uploaded_images/2019/05/tn_kvjvw6pkia5ap2e5nex9w_653.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/kvjvw6pkia5ap2e5nex9w_653.jpg)
(https://hobbicncforum.hu/uploaded_images/2019/05/tn_kvjvw6pkia5ap2e5nex9w_653.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/kvjvw6pkia5ap2e5nex9w_653.jpg)
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 május 12, 19:03
Írta: dtb Dátum 2019 május 12, 19:03
Ennyit találtam róla. (http://www.ibesmt.com/RB29G1GT4B1/RB29G1GT4B1/robustsyn-servo-motor/7772/SP.aspx)
Szervó, nem léptető.
Szervó, nem léptető.
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2019 május 12, 19:44
Írta: jani300 Dátum 2019 május 12, 19:44
Van egy faxnis motorom nekem is .
Hátha tudja valaki a rossz kép alapján miféle lehet ,én semmit nem találtam róla .
(https://hobbicncforum.hu/uploaded_images/2019/05/tn_7z7zak42j8vsyg9uxuf69_2430.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/7z7zak42j8vsyg9uxuf69_2430.jpg)
Hátha tudja valaki a rossz kép alapján miféle lehet ,én semmit nem találtam róla .
(https://hobbicncforum.hu/uploaded_images/2019/05/tn_7z7zak42j8vsyg9uxuf69_2430.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/7z7zak42j8vsyg9uxuf69_2430.jpg)
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 május 12, 19:50
Írta: 4umhue7vh Dátum 2019 május 12, 19:50
A képemen tisztán látszik hogy léptető, és műkődik is.Annyi hogy van rajta fék, meg egy néhány százas osztású encoder.
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 május 12, 19:54
Írta: 4umhue7vh Dátum 2019 május 12, 19:54
Ez egy szenzoros bldc motor, némi encoderkezdeménnyel.
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2019 május 12, 20:10
Írta: jani300 Dátum 2019 május 12, 20:10
Köszönöm !
Szerintem fénymásolóból van , három léptetővel és a panellal , de valószínűleg ezekből sem lesz semmi :(
Szerintem fénymásolóból van , három léptetővel és a panellal , de valószínűleg ezekből sem lesz semmi :(
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 május 12, 22:04
Írta: dtb Dátum 2019 május 12, 22:04
Jó :-) Nem szervo motor. Ez meg itt a driver hozzá. (https://smtpartssupply.en.made-in-china.com/product/qXSEQoOWXGRH/China-FUJI-Cp6-X-Axis-Servo-Driver-Cacr-Sr15bc1ksy396.html)
...de nekem tényleg mindegy, hidd el! :-)
...de nekem tényleg mindegy, hidd el! :-)
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 május 12, 22:25
Írta: 4umhue7vh Dátum 2019 május 12, 22:25
Ez egy yaskawa.[#rolleyes] Egyépként meg van hozzá a vezérlőm is de nem tudtam vele mit kezdeni.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 május 12, 22:55
Írta: dtb Dátum 2019 május 12, 22:55
Félreértel. Én nem ezen lovagolok, hogy ez mi, - mert NEM érdekel. Csak neked akartam segíteni, mert ott van a linkelt oldalon, a servopack oldalán a supported motorok listája, és ott van az te motorod is ezen a listán.
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 május 12, 23:32
Írta: 4umhue7vh Dátum 2019 május 12, 23:32
Ok, értem. Igazából megfejtésként raktam fel, hátha másnak is hentereg otthon egy ilyen motorja.....
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2019 május 13, 08:55
Írta: Rabb Ferenc Dátum 2019 május 13, 08:55
Talán egy alapfogalmat kellene tisztázni - nevezetesen azt, hogy mit jelent: SZERVO.
Ez egy hajtásrendszer aminek a lényege, hogy a kiadott parancs végrehajtásáról van visszacsatolás a szabályozórendszer felé és szükség esetén korrekció. De ez nem attól függ, hogy a sor végén léptetőmotor, DC vagy AC motor, esetleg egy hidromotor vagy pneumatika van.
A "mezei" visszacsatolás nélküli léptetőmotoros hajtásnál van egy parancssor, amit a léptetőmotor helyes méretezés esetén végrehajt pontosan - vagy nem (annyira)
Szervo rendszer esetén addig nincs továbblépés amíg a parancs maradéktalanul nincs végrehajtva, vagy a rendszer hibajelzéssel leáll...
A különböző szabályozási rendszerek, az ellenőrző és végrehajtó szerkezetek részletes taglalásától most eltekintenék, mert arról több vaskos könyvet írtak már nálam okosabbak és szorgalmasabbak.
Ez egy hajtásrendszer aminek a lényege, hogy a kiadott parancs végrehajtásáról van visszacsatolás a szabályozórendszer felé és szükség esetén korrekció. De ez nem attól függ, hogy a sor végén léptetőmotor, DC vagy AC motor, esetleg egy hidromotor vagy pneumatika van.
A "mezei" visszacsatolás nélküli léptetőmotoros hajtásnál van egy parancssor, amit a léptetőmotor helyes méretezés esetén végrehajt pontosan - vagy nem (annyira)
Szervo rendszer esetén addig nincs továbblépés amíg a parancs maradéktalanul nincs végrehajtva, vagy a rendszer hibajelzéssel leáll...
A különböző szabályozási rendszerek, az ellenőrző és végrehajtó szerkezetek részletes taglalásától most eltekintenék, mert arról több vaskos könyvet írtak már nálam okosabbak és szorgalmasabbak.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 május 13, 09:14
Írta: dtb Dátum 2019 május 13, 09:14
Egy percig sem vitatom a tőlem nagyságrendekkel jobban hozzáértő véleményét, de:
"Szervo rendszer esetén addig nincs továbblépés amíg a parancs maradéktalanul nincs végrehajtva, vagy a rendszer hibajelzéssel leáll..."
Az én kici, óccó kínai closed loopos léptetőmotoromra ez maradéktalanul igaz. Akkor most hogy is van ez?
"Szervo rendszer esetén addig nincs továbblépés amíg a parancs maradéktalanul nincs végrehajtva, vagy a rendszer hibajelzéssel leáll..."
Az én kici, óccó kínai closed loopos léptetőmotoromra ez maradéktalanul igaz. Akkor most hogy is van ez?
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2019 május 13, 09:29
Írta: Rabb Ferenc Dátum 2019 május 13, 09:29
Az előző kicsit korán ment el...
Closed loop (https://en.wikipedia.org/wiki/Closed_loop) Ez a lényege és nem az, hogy mi zümmög a sor végén. Az a működés minőségét befolyásolja - és ezzel együtt a rendszer árát is.
Tehát ugyanúgy szervo rendszer mint Ati-é, amiről kiderült, hogy még a vezérlője is meg van. De a végén neki is egy léptetőmotor dolgozik.
Closed loop (https://en.wikipedia.org/wiki/Closed_loop) Ez a lényege és nem az, hogy mi zümmög a sor végén. Az a működés minőségét befolyásolja - és ezzel együtt a rendszer árát is.
Tehát ugyanúgy szervo rendszer mint Ati-é, amiről kiderült, hogy még a vezérlője is meg van. De a végén neki is egy léptetőmotor dolgozik.
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2019 május 13, 09:32
Írta: Rabb Ferenc Dátum 2019 május 13, 09:32
De várom [#4936@Robsy] véleményét, ő majd - ha úgy gondolja - helyre teszi az alapfogalmakat, az esetleges félreértéseket és tévhiteket.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 május 13, 09:43
Írta: svejk Dátum 2019 május 13, 09:43
Hű, de de déja vu érzésem van... :)
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 május 13, 09:52
Írta: dtb Dátum 2019 május 13, 09:52
[#kacsint]
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 május 13, 09:55
Írta: 4umhue7vh Dátum 2019 május 13, 09:55
Ja teljesen igyazad van, engem nem is az zavar hogy szervo van rá írva, inkább a 200v AC ami a vezérlő tápfeszültsége, nem a motoré. Ha valaki rápillan az adattáblára, azt gondolj hogy egy macskadobáló servomotor és megy a sarokba. Közbe meg használható, akár egy pár ezer forintos vezérlővel is, max 40v 4-5A.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 május 14, 10:06
Írta: 000000000 Dátum 2019 május 14, 10:06
Egy motor attól még nem lesz szervómotor, ha szervó körbe beteszed. A szervómotor egy minőségi kategória, a paraméterei pedig a minél jobb szabályozhatósági feltételekhez lettek tervezve, amikkel egy átlagos, olcsó motor nem rendelkezik.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 május 14, 10:16
Írta: 000000000 Dátum 2019 május 14, 10:16
A következő dolgokat kell még tudni erről a szervomotor feliratú motorról, amit te léptetőként teszteltél:
1. Mennyi a tekercsek ohm-os ellenállása?
2. A motorból négy vezeték jön ki, azaz két galvanikusan
független tekercs kivezetésű a motor?
3. Ha kézzel forgatod a motortengelyt, és rövidrezárod az egyik tekercset, akkor jelentős fékező nyomatékot érzel?
4. Kézzel forgatva sima járású a motor, vagy döcögve be-be ugrik pozíciókba?
5. Mennyi a pólus száma?
1. Mennyi a tekercsek ohm-os ellenállása?
2. A motorból négy vezeték jön ki, azaz két galvanikusan
független tekercs kivezetésű a motor?
3. Ha kézzel forgatod a motortengelyt, és rövidrezárod az egyik tekercset, akkor jelentős fékező nyomatékot érzel?
4. Kézzel forgatva sima járású a motor, vagy döcögve be-be ugrik pozíciókba?
5. Mennyi a pólus száma?
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 május 14, 11:48
Írta: 4umhue7vh Dátum 2019 május 14, 11:48
1,8 fokos, 4 vezetékes pipoláris leptetőmotor, tesztelve.Már egy gépen van, 10mm emelkedésű orsót hajt 1:1 ben, 4,8m/perc sebességgel.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 május 14, 12:02
Írta: 000000000 Dátum 2019 május 14, 12:02
Szerinted léptető motor.
A gyártó adatlapja szerint nem az.
Pl. amit kértem, hogy mérd meg, a tekercs ellenállása mekkora?
A gyártó adatlapja szerint nem az.
Pl. amit kértem, hogy mérd meg, a tekercs ellenállása mekkora?
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 május 14, 14:42
Írta: 4umhue7vh Dátum 2019 május 14, 14:42
Berágtam, és szétszedtem megint, Ez a fogazott forgórész és állórész összekeverhető bármi mással? Ettől léptetőmotor. Úgy néz ki a gyártó hazudik.Van videó is a mŰködésről, később felrakom a youtube-ra.
(https://hobbicncforum.hu/uploaded_images/2019/05/tn_5unpqhgmvwwae2zjp74w_653.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/5unpqhgmvwwae2zjp74w_653.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/tn_hpvbe0jvevws4qh7i557_653.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/hpvbe0jvevws4qh7i557_653.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/tn_ch73dhh9i46bvny8iv954_653.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/ch73dhh9i46bvny8iv954_653.jpg)
(https://hobbicncforum.hu/uploaded_images/2019/05/tn_5unpqhgmvwwae2zjp74w_653.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/5unpqhgmvwwae2zjp74w_653.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/tn_hpvbe0jvevws4qh7i557_653.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/hpvbe0jvevws4qh7i557_653.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/tn_ch73dhh9i46bvny8iv954_653.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/ch73dhh9i46bvny8iv954_653.jpg)
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 május 14, 14:48
Írta: 4umhue7vh Dátum 2019 május 14, 14:48
A rossz kínai müszeremmel nem tudok pontosan megmérni ilyen kis ellenálását, ezért kihagyom.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 május 14, 14:52
Írta: svejk Dátum 2019 május 14, 14:52
Ne bosszantsd fel magad, a címkén lévő többi adat is léptetőre utal.
Egy neves gyártó azt írhat a cuccára amit akar, csak nekünk itt bugyuta hobbistáknak nem szabad véletlen sem valamit eltéveszteni, mert kapunk. :(
Egy neves gyártó azt írhat a cuccára amit akar, csak nekünk itt bugyuta hobbistáknak nem szabad véletlen sem valamit eltéveszteni, mert kapunk. :(
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 május 14, 15:11
Írta: 4umhue7vh Dátum 2019 május 14, 15:11
Ja, jó lenne egy 140W-os szervomotor 6,5Nm nyomatékkal, még ha csak tartonyomaték akkor is,bár ha a fékre gondoltak. Csak azt nem értem hogy jön ide a 200v 4A?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 május 14, 15:38
Írta: svejk Dátum 2019 május 14, 15:38
Mivel paralell-be van kötve hihető a 4A.
Mivel nem mai darab ezért a 200V is hihető, gondolom jó nagy az induktivitása.
Természetesen ez a meghajtó tápfeszültségét jelentheti.
Nehéz követni a gyártók logikáját gondolatmenetét, ott is csak mérnökök ülnek. :)
(nem ám megsértődni senkinek! :) )
Mivel nem mai darab ezért a 200V is hihető, gondolom jó nagy az induktivitása.
Természetesen ez a meghajtó tápfeszültségét jelentheti.
Nehéz követni a gyártók logikáját gondolatmenetét, ott is csak mérnökök ülnek. :)
(nem ám megsértődni senkinek! :) )
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 május 14, 15:39
Írta: svejk Dátum 2019 május 14, 15:39
Az adatlapján biztos le van írva minden szépen, csak gondolom nem elérhető.
Ide a motorra meg a "legszebb" adatok kerültek csak. :)
Ide a motorra meg a "legszebb" adatok kerültek csak. :)
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2019 május 14, 16:19
Írta: Rabb Ferenc Dátum 2019 május 14, 16:19
Egy kínai weblapon a Google Translate azt mondja erről az akármiről, hogy ez egy "Sanyo lépcsős szervomotor RB29G1GT4B1"
Ha az "akcentusát" leszámítjuk, akár még léptetőmotor is lehet egy szervo körben. Mert a vezérlője mindenütt jár hozzá mint hozományhoz a menyasszony...
Ha az "akcentusát" leszámítjuk, akár még léptetőmotor is lehet egy szervo körben. Mert a vezérlője mindenütt jár hozzá mint hozományhoz a menyasszony...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 május 14, 16:26
Írta: 000000000 Dátum 2019 május 14, 16:26
Ne "rágjál be", szétszedni is kár volt megint, ezek helyett még mindig nem válaszoltál a 6098 bejegyzésem 1, 3, 4 pontjaira.
Mellesleg jó ha megbarátkozol azzal a gondolattal, hogy minden állandó mágneses AC szervo motort ha "megerőszakolunk", akkor "léptető motorként" is képes működni, de fordítva ez csak részben igaz. Tehát nincs abban semmi meglepő, hogy ez a szerencsétlen motor forog neked.
Mellesleg jó ha megbarátkozol azzal a gondolattal, hogy minden állandó mágneses AC szervo motort ha "megerőszakolunk", akkor "léptető motorként" is képes működni, de fordítva ez csak részben igaz. Tehát nincs abban semmi meglepő, hogy ez a szerencsétlen motor forog neked.
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 május 14, 16:41
Írta: 4umhue7vh Dátum 2019 május 14, 16:41
Írtam egy pár nappal ezelőtti hozzászólásomban, hogy max 40v-ról lehet használni,nagyobb feszről már mocskosul melegszik, és itt jön elő a 4 amper, kb addíg ment fel jól megterhelve, Igy nagyjából ki is jön a 140 Watt, ami rá van írva.Tartásban jó erös, és olyan mitha oda lenne hegesztve a tengely, nem nyúlik jobbra balra.de 500rpm felett elveszti a nyomatéka nagyrészét.
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 május 14, 16:48
Írta: 4umhue7vh Dátum 2019 május 14, 16:48
Ez nem csak forog, lényegesen jobb tulajdonságokkal rendelkezik mint egy hasonló kinai léptetőmotor.
Kiszáltam!
Kiszáltam!
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 május 14, 17:05
Írta: svejk Dátum 2019 május 14, 17:05
"...de 500rpm felett elveszti a nyomatéka nagyrészét"
40 V-ról még a modern kis induktivitású motorok sem pörögnek sokkal jobban.
Itt jönne képbe az a 200 V még ha nem is teljesen annyi.
A saját vezérlője bizonyára 200 V-ról megy és jól lekezeli a problémát.
40 V-ról még a modern kis induktivitású motorok sem pörögnek sokkal jobban.
Itt jönne képbe az a 200 V még ha nem is teljesen annyi.
A saját vezérlője bizonyára 200 V-ról megy és jól lekezeli a problémát.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 május 14, 17:09
Írta: svejk Dátum 2019 május 14, 17:09
Visszaolvastam... hány ampera állítottad azt a DM860-at?
Egy rendes lépetőmotor vezérlő a beállított áramot tartja a teljes tápfesz tartományban, attól nem szabadna jobban melegednie, hogy a ttápfeszét feljebb viszed a meghajtónak.
Persze vannak határok amiket főképp a motor induktivitása határoz meg.
Egy rendes lépetőmotor vezérlő a beállított áramot tartja a teljes tápfesz tartományban, attól nem szabadna jobban melegednie, hogy a ttápfeszét feljebb viszed a meghajtónak.
Persze vannak határok amiket főképp a motor induktivitása határoz meg.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 május 14, 17:12
Írta: svejk Dátum 2019 május 14, 17:12
a tűzforró meg megint nem egy agzakt meghatározás.
Egy átlag ember a 70 C-fokot a tenyerével kb 1 másodpercig viseli el.
Régebbi Vexta vezérlő leírásában meg az szerepel, hogy ha a motorod melegebb mint 110 (!) C-fok akkor vedd vissza az áramot. :)
Kár hogy nincs meg a saját vezérlője, ezt a motort csak azzal tudnád igazán kihasználni.
Egy átlag ember a 70 C-fokot a tenyerével kb 1 másodpercig viseli el.
Régebbi Vexta vezérlő leírásában meg az szerepel, hogy ha a motorod melegebb mint 110 (!) C-fok akkor vedd vissza az áramot. :)
Kár hogy nincs meg a saját vezérlője, ezt a motort csak azzal tudnád igazán kihasználni.
Cím: Re:Léptetőmotor
Írta: 2f428kduf Dátum 2019 május 14, 17:18
Írta: 2f428kduf Dátum 2019 május 14, 17:18
A világ fejlődik, úgy több mint 35 éve panaszkodtam a franciáknak, hogy a daru forgató-motorján a kék festék, már sárgába hajlik, azt válaszolták: azon tojást is lehet sütni. És tényleg, talán azóta is megy.
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 május 14, 17:39
Írta: 4umhue7vh Dátum 2019 május 14, 17:39
Az amper maxon volt 7,5 :) DM860A
Egyépként megvan a vezérlője, most néztem, tényleg rámegy a 200volt a fetekre. Régebben küzdöztem vele pár napig, de nem jutottam semmire, van vagy 20db optós bemenete, ezeket ingereltem minden féle variációba de meg sem nyekkent.Szerintem nem is step/dir-es.
Egyépként megvan a vezérlője, most néztem, tényleg rámegy a 200volt a fetekre. Régebben küzdöztem vele pár napig, de nem jutottam semmire, van vagy 20db optós bemenete, ezeket ingereltem minden féle variációba de meg sem nyekkent.Szerintem nem is step/dir-es.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 május 14, 17:54
Írta: svejk Dátum 2019 május 14, 17:54
"Az amper maxon volt 7,5 :)"
Ugye-ugye!? [#ejnye1]
Ugye-ugye!? [#ejnye1]
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 május 14, 18:09
Írta: 4umhue7vh Dátum 2019 május 14, 18:09
Na jó megpróbálom 80v-ról kevesebb Amperral. [#kacsint]
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 május 14, 21:42
Írta: 4umhue7vh Dátum 2019 május 14, 21:42
75 Voltot tudtam varázsolni, az ampert 4.9-re állitottam. jobb lett! A 4.8m/perc sebességet fel tudtam vinni 5.1-re 0.3 G mellet. 1méteres 25/10-es orsót forgat.Szerintem nem rossz.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 május 14, 22:09
Írta: svejk Dátum 2019 május 14, 22:09
De ha 4 A van a mocira írva, akkor miért 4,9-re állítottad és miért nem a 4,28-ra? [#nemtudom]
Ezen encoder is van?
Akkor meglehet valamelyik encoderes vezérlővel lehetne még próbálkozni.
Ezen encoder is van?
Akkor meglehet valamelyik encoderes vezérlővel lehetne még próbálkozni.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 május 14, 22:12
Írta: svejk Dátum 2019 május 14, 22:12
Komoly a mechanikád?
A 3000 mm/s2 már eléggé rángatni szokta a hobby szerkezeteket.
Sajnos kompromisszumra szinte mindig szükség van.
A 3000 mm/s2 már eléggé rángatni szokta a hobby szerkezeteket.
Sajnos kompromisszumra szinte mindig szükség van.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 május 14, 22:20
Írta: dtb Dátum 2019 május 14, 22:20
Az eredeti meghajtója micsoda egyébként? Arról lenne olyan fotó, amivel be lehet azonosítani?
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 május 14, 22:47
Írta: 4umhue7vh Dátum 2019 május 14, 22:47
Kisseb áramnál nem melegedett eléggé a motor:)
Túl vagyok már az encoderes vezérlő kinlódáson, egy pár oldalal visszább megtalálod ha érdekel.
Túl vagyok már az encoderes vezérlő kinlódáson, egy pár oldalal visszább megtalálod ha érdekel.
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 május 14, 23:03
Írta: 4umhue7vh Dátum 2019 május 14, 23:03
Gránit az egész váz. Ez a motor az X tengelyre megy, még a Z nincs rajta, az még változtat a dinamikán. Ha lesz felesleges pénzem veszek ide is egy encóderes 6-8 Nm-es motort, de most az a lényeg hogy végre menjen valahogy.
Cím: Re:Léptetőmotor
Írta: noctiluxx Dátum 2019 május 20, 21:19
Írta: noctiluxx Dátum 2019 május 20, 21:19
Sziasztok!
Segítsetek kérlek jó meghajtót találni a motorjaimhoz!Régi álmom teljesült nemrég, sikeült egy Farkas Ádám féle w300-ra szert tennem. SONCEBOZ 6600R045 motorok vannak rajta. Kaptam "ajándékba" tb6600 meghajtókat, de jól emlékeztem, hogy nem a technika csúcsai :) Egy nagyobb gépből volt egy szett 2dm542, amivel gyönyörűen megy, de a legalacsonyabb 1A beállítással is melegednek picit. A tápfesz 45V.
Mi a jó választás? Mach3-nál maradnék és beruháznék egy smoothstepperre is...
Segítsetek kérlek jó meghajtót találni a motorjaimhoz!Régi álmom teljesült nemrég, sikeült egy Farkas Ádám féle w300-ra szert tennem. SONCEBOZ 6600R045 motorok vannak rajta. Kaptam "ajándékba" tb6600 meghajtókat, de jól emlékeztem, hogy nem a technika csúcsai :) Egy nagyobb gépből volt egy szett 2dm542, amivel gyönyörűen megy, de a legalacsonyabb 1A beállítással is melegednek picit. A tápfesz 45V.
Mi a jó választás? Mach3-nál maradnék és beruháznék egy smoothstepperre is...
Cím: Re:Léptetőmotor
Írta: Gyati Dátum 2019 május 20, 23:06
Írta: Gyati Dátum 2019 május 20, 23:06
Szia!
Ilyet vegyél, jobban jársz.
UC400ETH (https://www.cncdrive.hu/UC400ETH.html)
Ilyet vegyél, jobban jársz.
UC400ETH (https://www.cncdrive.hu/UC400ETH.html)
Cím: Re:Léptetőmotor
Írta: noctiluxx Dátum 2019 május 21, 19:29
Írta: noctiluxx Dátum 2019 május 21, 19:29
Köszönöm, ez szimpatikus! Ezt gondolom egy átalakítóval dughatom a sima BOB-ra. Mach3 pluginnal használható rendesen, vagy mindenképp uccnc? Eléggé hosszászoktam már a mach3hoz...
Cím: Re:Léptetőmotor
Írta: dezsoe Dátum 2019 május 21, 20:17
Írta: dezsoe Dátum 2019 május 21, 20:17
Használhatod Mach3-mal is. A mellékelt kábel d-sub25-ben végződik, simán rádugod és kész. Esélyes, hogy még konfigurálnod sem kell a már meglévő telepítésedet. Aztán, ha ki is akarod használni, akkor egyszer megleped magad egy UCCNC-vel. :)
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 május 21, 22:00
Írta: 4umhue7vh Dátum 2019 május 21, 22:00
Szia! jó pár éve Mach3-at és Edingcnc-t használok, fogalmam sincs az Uccnc-ről. Mi az a miétrt érdemes lenne beszereznem?
Cím: Re:Léptetőmotor
Írta: dezsoe Dátum 2019 május 21, 23:56
Írta: dezsoe Dátum 2019 május 21, 23:56
Szia!
Az előző hozzászólásban arra utaltam, hogy nem véletlenül kezdődik egyformán az UC400ETH és az UCCNC. Ugyanaz a fejlesztője az UCxxx vezérlőknek és az UCCNC-nek, és azt teljesen általánosságban el lehet mondani, hogy ez jót szokott jelenteni.
Az UCxxx vezérlőknek megvan az a jó tulajdonsága, hogy tudod használni Mach3-mal is, de ha úgy támad kedved, akkor megveheted hozzá az UCCNC licencet. Nagyon sok olyan vezérlő kapható, ami csak Mach3-mal (vagy mással, de csak egy programmal) működik, így ha le akarod cserélni a programot, akkor kidobhatod a vezérlőt is.
Akárhogy cifrázzuk, a Mach3 elavult, hibás, de nincs támogatása és lassan nem lesz gép sem, amin fusson. Ahogy olvasom, a Win10 legújabb frissítései óta vannak vele gondok. Tudom, lehet használni még XP-t is, meg ami közte van, illetve főleg csak volt, hiszen januártól már a Win7 támogatása is megszűnik. Az egyre újabb gépekben pedig olyan alkatrészek vannak, amivel már a régi rendszerek nem mennek, mindennaposak az olyan új alaplapok (főleg laptopban), amikre már nem tudsz csak Win10-et telepíteni.
Az előző hozzászólásban arra utaltam, hogy nem véletlenül kezdődik egyformán az UC400ETH és az UCCNC. Ugyanaz a fejlesztője az UCxxx vezérlőknek és az UCCNC-nek, és azt teljesen általánosságban el lehet mondani, hogy ez jót szokott jelenteni.
Az UCxxx vezérlőknek megvan az a jó tulajdonsága, hogy tudod használni Mach3-mal is, de ha úgy támad kedved, akkor megveheted hozzá az UCCNC licencet. Nagyon sok olyan vezérlő kapható, ami csak Mach3-mal (vagy mással, de csak egy programmal) működik, így ha le akarod cserélni a programot, akkor kidobhatod a vezérlőt is.
Akárhogy cifrázzuk, a Mach3 elavult, hibás, de nincs támogatása és lassan nem lesz gép sem, amin fusson. Ahogy olvasom, a Win10 legújabb frissítései óta vannak vele gondok. Tudom, lehet használni még XP-t is, meg ami közte van, illetve főleg csak volt, hiszen januártól már a Win7 támogatása is megszűnik. Az egyre újabb gépekben pedig olyan alkatrészek vannak, amivel már a régi rendszerek nem mennek, mindennaposak az olyan új alaplapok (főleg laptopban), amikre már nem tudsz csak Win10-et telepíteni.
Cím: Re:Léptetőmotor
Írta: 4umhue7vh Dátum 2019 május 22, 10:02
Írta: 4umhue7vh Dátum 2019 május 22, 10:02
Ok, köszi az infót.
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2019 május 23, 16:10
Írta: B.Zoltán Dátum 2019 május 23, 16:10
Teszteltem a DM542 (https://www.ebay.com/itm/DM542-Stepper-Motor-Driver-For-2-phase-86-57-Series-Digital-Stepper-Motor-Driver/132957436020?hash=item1ef4e17874:g:xz4AAOSwaKVcZ9W~) vezérlőt.
Nagy meglepetés ért, hogy a 400 lépés/ford felbontásnál is nagyon csendes, rezonancia mentes.
A másik 2M542 vezérlő 1600 lép/ford-nál is jobban zajong, mint ez.
Az esztergán nagyon észrevehető a különbség a menetvágásnál, főleg az előtolásnál.
A képeken látható a magyarázata a halk járásának. A 2M542 még a klasszikus lépcsőjellel dolgozik, ez viszont viszonylag szép szinuszt csinál már akkor is, ha 6 mp alatt fordul körbe a motor (10 RPM).
Felvettük a két vezérlő hangját, ugyanolyan körülmények között, egy deszkalapra rakva, hogy rezonálhasson ha akar:
(A DM-nél még a jelgenerátor nyomógombjának nyomkodása is erősebb a motor hangjánál.)
2M542 hangja (https://cnctar.hobbycnc.hu/B.Zoltan/Eszterga/2M542_hangja_400_lepeses_mod_20-400_lepes_mp.mp3)
DM542 hangja (https://cnctar.hobbycnc.hu/B.Zoltan/Eszterga/DM542_hangja_400_lepeses_mod_20-400_lepes_mp.mp3)
(https://hobbicncforum.hu/uploaded_images/2019/05/tn_jci0nx2938v98ei6ki_2865.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/jci0nx2938v98ei6ki_2865.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/tn_3q4fb5mpx6u2usqe5gu7_2865.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/3q4fb5mpx6u2usqe5gu7_2865.jpg)
Nagy meglepetés ért, hogy a 400 lépés/ford felbontásnál is nagyon csendes, rezonancia mentes.
A másik 2M542 vezérlő 1600 lép/ford-nál is jobban zajong, mint ez.
Az esztergán nagyon észrevehető a különbség a menetvágásnál, főleg az előtolásnál.
A képeken látható a magyarázata a halk járásának. A 2M542 még a klasszikus lépcsőjellel dolgozik, ez viszont viszonylag szép szinuszt csinál már akkor is, ha 6 mp alatt fordul körbe a motor (10 RPM).
Felvettük a két vezérlő hangját, ugyanolyan körülmények között, egy deszkalapra rakva, hogy rezonálhasson ha akar:
(A DM-nél még a jelgenerátor nyomógombjának nyomkodása is erősebb a motor hangjánál.)
2M542 hangja (https://cnctar.hobbycnc.hu/B.Zoltan/Eszterga/2M542_hangja_400_lepeses_mod_20-400_lepes_mp.mp3)
DM542 hangja (https://cnctar.hobbycnc.hu/B.Zoltan/Eszterga/DM542_hangja_400_lepeses_mod_20-400_lepes_mp.mp3)
(https://hobbicncforum.hu/uploaded_images/2019/05/tn_jci0nx2938v98ei6ki_2865.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/jci0nx2938v98ei6ki_2865.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/tn_3q4fb5mpx6u2usqe5gu7_2865.jpg) (https://hobbicncforum.hu/uploaded_images/2019/05/3q4fb5mpx6u2usqe5gu7_2865.jpg)
Cím: Re:Léptetőmotor
Írta: 8c3s5ew4i Dátum 2019 május 27, 11:26
Írta: 8c3s5ew4i Dátum 2019 május 27, 11:26
Sziasztok!
Kis 3018-as kinai cnc-t vettem, mnegérkezéskor a léptetőkön semmi adatot nem találtam. Józan paraszti ésszel rendeltem hozzá Nema 17 léptetőből 12v-1.4A-rest 1,8°. Multhéten érkezett, próbaként felcsatoltam de nem megy. Balra forgatva rángatózva megy, jobbra fergatva is balra fordul de rángatózva azaz előre hátra. Vagy nem jót rendeltem vagy eleve sz.. az egész. Kézzel balra forgatva simán forog de jobbra lehet érezni a mágneseket azaz a lépésközöket.
Találkozott már valaki hasonlóval?, ez most csereérett gyári hiba miatt vagy elcsesztem és nem jót rendeltem.
Kis 3018-as kinai cnc-t vettem, mnegérkezéskor a léptetőkön semmi adatot nem találtam. Józan paraszti ésszel rendeltem hozzá Nema 17 léptetőből 12v-1.4A-rest 1,8°. Multhéten érkezett, próbaként felcsatoltam de nem megy. Balra forgatva rángatózva megy, jobbra fergatva is balra fordul de rángatózva azaz előre hátra. Vagy nem jót rendeltem vagy eleve sz.. az egész. Kézzel balra forgatva simán forog de jobbra lehet érezni a mágneseket azaz a lépésközöket.
Találkozott már valaki hasonlóval?, ez most csereérett gyári hiba miatt vagy elcsesztem és nem jót rendeltem.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 május 27, 11:41
Írta: dtb Dátum 2019 május 27, 11:41
Ilyen akkor szokott lenni, h az A-A B-B vezetéket nem jó sorrendbe kötötted be. Műszerrel, vagy uram bocsá' pár volttal nézd meg, melyik vezeték melyikkel van párba, és ha rángatózik, akkor cseréld meg a pólust (a vezetéket)
Cím: Re:Léptetőmotor
Írta: 8c3s5ew4i Dátum 2019 május 27, 12:12
Írta: 8c3s5ew4i Dátum 2019 május 27, 12:12
A cnc gyári vezetékével próbáltam mert annak is ugyanaz a csatija, szin szerint is eggyezik a hozzákapott vezetékekkel.
Cím: Re:Léptetőmotor
Írta: 8c3s5ew4i Dátum 2019 május 27, 12:23
Írta: 8c3s5ew4i Dátum 2019 május 27, 12:23
bár a szín a kinai occo-nál nem mindig igaz mert találkoztam már 220v os hosszabitóval ahol a sárgazöld volt a fázisnak kötve és a kék a föld [#nyes]
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 május 27, 12:26
Írta: dtb Dátum 2019 május 27, 12:26
Hát akkor talán ideje lenne megnevezni, hogy konkrétan milyen vezérlőről, milyen motorról van szó, és milyen szoftverről, mert mondjuk ezzel kellett volna kezdeni.
Cím: Re:Léptetőmotor
Írta: 8c3s5ew4i Dátum 2019 május 27, 12:48
Írta: 8c3s5ew4i Dátum 2019 május 27, 12:48
Megnevezném ha ismerném a tipusát. Mint említettem 3018 as díy kinai. Arduino vezérli ez fix, tipusa nem leolvasható, de a gyári léptetőket szépen viszi grbl programból és offline vezérlővel is hiba nélkül. De a rendelt teljesen ugyanaz kinézetre csatlakozóra a gépenlevőkhöz, méretekre is, viszont a gépenlevők jelölés nélküliek. forgatót akartam csinálni és ugy okoskodtam hogy elég csak a csatit átdugni ha másik léptető van a forgatón, mert az x léptetésre akartam a forgatót. ennél többet nemtudok a lelkéről. Képet tudok max de azt is estefelé.
Cím: Re:Léptetőmotor
Írta: 8c3s5ew4i Dátum 2019 május 27, 13:12
Írta: 8c3s5ew4i Dátum 2019 május 27, 13:12
Ezért gondoltam hogy esetleg rossz a léptető mert lehetőség sincs a csatit másképp rádugni. Ha a rángatózás bekötési hibára utal akkor kimérem az a-c b-d vezetékeket és csinálok forditót. Ha meg rrossz akkor kuka és rendelek mást, csak az 1 hónapos szállítási idő dühít.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 május 27, 13:37
Írta: dtb Dátum 2019 május 27, 13:37
Na akkor kezd elölröl. Mindig ird le, miről beszélsz, a motorról, vagy a driverről. Mivel próbáltad léptetni? Arduinóval, vagy valami más szoftverrel? A léptetőmotoroknál A-A B-B jelölés van, az A, B, C, D jelölés a modellekhez használt léptetőmotoroknál használatos. Hány vezetéke van a motorodnak? Hogy kötötted be? Fényképezd le, vagy rajzold le, de lássuk, hogy mit alkottál, hogyan akartad bekötni. Milyen léptetővezérlőt vettél? Link? Próbálj már valami használható, konkrét információt is adni, mert ez így csak vaktába találgatás.
Cím: Re:Léptetőmotor
Írta: 8c3s5ew4i Dátum 2019 május 27, 14:07
Írta: 8c3s5ew4i Dátum 2019 május 27, 14:07
Előről: szépen működő kis arduino grbl kártya vezérli az x-y-z léptetőim és a 775 ös motort vagy lézert. PC usbn kapcsolódik gépen wint10 enterprise. A hozzákapott grbl control progival szépen dolgozik a gép / ugyanigy a felcsatlakoztatható offline vezérlővel is szépen dolgozik/. a vezérlési jelre a léptetők a beállított mértékben pontosan mozognak /bipoláris léptetők 1.8° ezt tudtam kideríteni. azt is kitudtam guglizni / ami a barátom/ hogy 1.7 a-ig tudnak az arduino vezérlői dolgozni.
minden szép és jó a gyári rendszerben. De a rendelt bipoláris léptetőmotor ami 12V 1.3A és 1.8° a gyártó adatai szerint.
Na most ha lehúzom az x tengelyem léptetőmotorjánál levő csatlakozót ami az arduinó-tól jön mint x vezérlés, és rádugom a vásárolt bipoláris léptetőmotor csatlakozójára akkor bárhonnan vezérlem is az x-et csak rángat, visszadugva az eredeti léptetőre megy szépen.
Tehát az én megitélésem hogy sz... az egész, de lehet hogy csak az occo gyárban elkötötték a madzagokat
de akkor bent a motorban :-)
Tehát a programoknak az offline vezérlőknek az arduinónak sőt a pc-nek sincs köze a rossz müködéshez.
marad az a lehetőség hogy a feszültség nem jó /de az max égésben vagy gyenge müködésben jelezne/ az amper eggyezik a gyárival.
40 éve vagyok elektromos :-) csak én leragadtam a vezérlés relés és diódás szintjén / de azt megtanultam rendesen Kuasy fröccsgépeken/
Ezért bátorkodtam csak a léptetőről érdeklődni a léptetős topicban.
Hátha ez a jelenség másra is utalhat.
minden szép és jó a gyári rendszerben. De a rendelt bipoláris léptetőmotor ami 12V 1.3A és 1.8° a gyártó adatai szerint.
Na most ha lehúzom az x tengelyem léptetőmotorjánál levő csatlakozót ami az arduinó-tól jön mint x vezérlés, és rádugom a vásárolt bipoláris léptetőmotor csatlakozójára akkor bárhonnan vezérlem is az x-et csak rángat, visszadugva az eredeti léptetőre megy szépen.
Tehát az én megitélésem hogy sz... az egész, de lehet hogy csak az occo gyárban elkötötték a madzagokat
de akkor bent a motorban :-)
Tehát a programoknak az offline vezérlőknek az arduinónak sőt a pc-nek sincs köze a rossz müködéshez.
marad az a lehetőség hogy a feszültség nem jó /de az max égésben vagy gyenge müködésben jelezne/ az amper eggyezik a gyárival.
40 éve vagyok elektromos :-) csak én leragadtam a vezérlés relés és diódás szintjén / de azt megtanultam rendesen Kuasy fröccsgépeken/
Ezért bátorkodtam csak a léptetőről érdeklődni a léptetős topicban.
Hátha ez a jelenség másra is utalhat.
Cím: Re:Léptetőmotor
Írta: 8c3s5ew4i Dátum 2019 május 27, 14:12
Írta: 8c3s5ew4i Dátum 2019 május 27, 14:12
Jópár bipoláris léptetőmotor kapcsolási rajzánál nem használják az A-A B-B jelölést. lásd gugli
csak hogy ne beszéljünk el egymás melett
csak hogy ne beszéljünk el egymás melett
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 május 27, 14:34
Írta: dtb Dátum 2019 május 27, 14:34
Akkor ha 40 éve vagy elektromos, akkor én azzal kezdeném, hogy az eredeti motornál megnézném, hogy melyik kivezetés mivel van párban, (tehát, hogy eredeti motoron az +A nak melyik az -A párja, és melyik a +B, -B) utána ugyanezt megnézném az új motorokon is. Ha egyezik, akkor gáz van. Ha nem, akkor át kell alakítani a csatlakozót. Először ezt nézd meg, utána lehet tovább agyalni. Szerintem.
Cím: Re:Léptetőmotor
Írta: 8c3s5ew4i Dátum 2019 május 27, 14:42
Írta: 8c3s5ew4i Dátum 2019 május 27, 14:42
ugy gondolkoztam hogy csak nem lehet ennyire rossz 1 gyártócég hogy elkeverje, ezért nem is mértem
Bár a diy rendszer nem nyerte el a cnc-nél mert amit küldtek ott a léptetőmotor felfogatása el volt furva 4 mm-t. az asztalba volt 2 mm csavarodás, meg pár apróság
Bár a diy rendszer nem nyerte el a cnc-nél mert amit küldtek ott a léptetőmotor felfogatása el volt furva 4 mm-t. az asztalba volt 2 mm csavarodás, meg pár apróság
Cím: Re:Léptetőmotor
Írta: 8c3s5ew4i Dátum 2019 május 27, 16:53
Írta: 8c3s5ew4i Dátum 2019 május 27, 16:53
Nagyon köszönöm az infokat. A cnc gyártó kötötte be másképp :-(
Az utánrendelt ugy ahogy kell és ahogy olvastam a hatpólusu csatin a1-a3 b4-b6
Cnc gyártónál szerintem /direkte forditva/ akarattal
a1-a4 b3-b6
Ennyit a kompatibilitásról.
Az életbe nem jöttem volna rá hisz a csatik stimmeltek.
Köszönöm szépen a tanácsot, hálám örökké üldözni fog.
Az utánrendelt ugy ahogy kell és ahogy olvastam a hatpólusu csatin a1-a3 b4-b6
Cnc gyártónál szerintem /direkte forditva/ akarattal
a1-a4 b3-b6
Ennyit a kompatibilitásról.
Az életbe nem jöttem volna rá hisz a csatik stimmeltek.
Köszönöm szépen a tanácsot, hálám örökké üldözni fog.
Cím: Re:Léptetőmotor
Írta: 8c3s5ew4i Dátum 2019 május 27, 16:58
Írta: 8c3s5ew4i Dátum 2019 május 27, 16:58
Az utánrendelthez adottkábel érintkezőit megforgattam és megy mint a kisangyal. látod az öreg róka erre nem gondol és még közben az is kiderült hogy a 2mm menetemelkedésű orsó 1 körre 4 mm visz mert dufla bekezdésű / na ezzel is szivtam volna :-D
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 május 27, 16:58
Írta: dtb Dátum 2019 május 27, 16:58
A kis kínai észjárását úgyse tudod kitalálni. A lényeg, hogy legközelebb már nem hiszel a szemednek, hanem először ellenőrzöl :-) [#taps]
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 május 27, 17:03
Írta: dtb Dátum 2019 május 27, 17:03
Este van már... Ne fárassz :-) Ezt azért még egyszer gondold át... Nem gondolnám, hogy olcsó DIY gépbe dupla bekezdésű, 2mm emelkedésű orsót adnak... Ott vagy a mikrolépéssel, vagy valami mással lesz a kavarás, de 4mm, vagy 5mm a kinai az én tapasztalatom szerint.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 május 27, 17:05
Írta: dtb Dátum 2019 május 27, 17:05
...feltéve, hogy golyós orsóról beszélünk, és nem trapézról.... de ott is furcsálnám.
Cím: Re:Léptetőmotor
Írta: 8c3s5ew4i Dátum 2019 május 27, 17:27
Írta: 8c3s5ew4i Dátum 2019 május 27, 17:27
Trapéz és 2 bekezdésű :-)
Szemüveggel néztem
Szemüveggel néztem
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 május 27, 17:56
Írta: 000000000 Dátum 2019 május 27, 17:56
Egy orsónál az egy fordulatra történő elmozdulásnál a menetemelkedés számít, a bekezdések száma nem!
Tehát az egy sületlenség, ahogy írtad, miszerint 2 bekezdés 2 mm menetemelkedéssel az 2*2=4 mm elmozdulást okoz.
Tehát az egy sületlenség, ahogy írtad, miszerint 2 bekezdés 2 mm menetemelkedéssel az 2*2=4 mm elmozdulást okoz.
Cím: Re:Léptetőmotor
Írta: 8c3s5ew4i Dátum 2019 május 27, 18:09
Írta: 8c3s5ew4i Dátum 2019 május 27, 18:09
na akkor hogy is van?
4 mm elmozdulási parancsot adok 1 tejes körhöz a léptetőn ha a menetek közt 2mm van akkor hogy jön ki?
4 mm elmozdulási parancsot adok 1 tejes körhöz a léptetőn ha a menetek közt 2mm van akkor hogy jön ki?
Cím: Re:Léptetőmotor
Írta: 8c3s5ew4i Dátum 2019 május 27, 18:15
Írta: 8c3s5ew4i Dátum 2019 május 27, 18:15
megmérve mert itt ülök előtte
1 kör 4mm elmozdulás
a menetek közt 2 mm
2 fuvolás a occo kinai szerint és szerintem is mert ellenőrizve
1 kör 4mm elmozdulás
a menetek közt 2 mm
2 fuvolás a occo kinai szerint és szerintem is mert ellenőrizve
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 május 27, 18:18
Írta: 000000000 Dátum 2019 május 27, 18:18
Fektessél be te is egy kis gondolkodási energiát, rajzolgassál orsót, meneteket, és ha nem megy X óra múlva a tisztán látás, majd visszatérünk rá.
Így érted neg, és tanulod is meg igazán, ha te is dolgozol egy kicsit, hiszen alap dologról van szó.
Így érted neg, és tanulod is meg igazán, ha te is dolgozol egy kicsit, hiszen alap dologról van szó.
Cím: Re:Léptetőmotor
Írta: 8c3s5ew4i Dátum 2019 május 27, 18:19
Írta: 8c3s5ew4i Dátum 2019 május 27, 18:19
akkor is én nyertem mert átgondolva / józan parasztival/ csak az egymás utáni meneteket mértem és az 2 mm
De minden másodikat kell mérni :-)
évek kérdése és belejövök :-)
De minden másodikat kell mérni :-)
évek kérdése és belejövök :-)
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 május 27, 18:35
Írta: dtb Dátum 2019 május 27, 18:35
Nem minden másodikat kell mérni!!!
"1 kör 4mm elmozdulás" Ennyi, és ne ragozd tovább, mert belegabalyodsz a saját hmmmm....
Az a lényeg, hogy alap esetben mondjuk 200 lépés egy kör, (360/1,8) akkor mennyi az elmozdulás, tehát így egy step jelre 4mm/200lépés=0,02mm lépésed lesz.
Javaslom, olvasgass! :-)
"1 kör 4mm elmozdulás" Ennyi, és ne ragozd tovább, mert belegabalyodsz a saját hmmmm....
Az a lényeg, hogy alap esetben mondjuk 200 lépés egy kör, (360/1,8) akkor mennyi az elmozdulás, tehát így egy step jelre 4mm/200lépés=0,02mm lépésed lesz.
Javaslom, olvasgass! :-)
Cím: Re:Léptetőmotor
Írta: 8c3s5ew4i Dátum 2019 május 27, 18:55
Írta: 8c3s5ew4i Dátum 2019 május 27, 18:55
olvasgatok
de nem érteni akarok hozzá hanem csak összehozni magamnak.
Ezért kérdezek olyanokat akik ezt tudják és vágják :-)
ebből lehet tanulni
Főleg azt hogy ne bízz az occo áruban :-)
de nem érteni akarok hozzá hanem csak összehozni magamnak.
Ezért kérdezek olyanokat akik ezt tudják és vágják :-)
ebből lehet tanulni
Főleg azt hogy ne bízz az occo áruban :-)
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 május 27, 21:49
Írta: dtb Dátum 2019 május 27, 21:49
Hát ez rossz hozzáállás... [#wilting]
Cím: Re:Léptetőmotor
Írta: 8c3s5ew4i Dátum 2019 május 27, 22:48
Írta: 8c3s5ew4i Dátum 2019 május 27, 22:48
akkor nem értetted mit akartam
az hogy használok orsót még nem jelenti hogy tudok csinálni
azt hogy az áttétet kiszámoljam az nem gond mert a fokból kitudtam számolni a léptetést, azt viszont nem tudtam hogy 4 mm mozdul az orsó 1 körre mivel én csak a menetemelkedést számoltam a 2 mm de ez nekem nem lényeges mert nekem az átmérők kellenek hogy a faragnivaló csövem is ugy mozogjon mint ha sik felület lenne és ez megoldgató ugy nálam hogy gumi görgőket hajtok meg és igy nem számít a cső átmérője csak a z beállításnál
tévedésem a menet miatt meg 2 x finomabb mozgást hozott volna ami megint csak 1 hetet visszavett volna mig megoldódik
a gondom ott hogy szakmai információ a neten rengeteg van de mind englis, én meg csak a magyart értem, hiába van tolmácsprogi ha a szakmai szavakat nem érthetőre hozza ki.
Ezért kérdezek és halgatom meg azokat akik értik. nem szégyelek kérdezni. nincs olyan ember aki mindenhez ért és nem is lessz. Hiába nézek utánna ha csak csepegtetett részinformációk vannak. Ezért hiszek bárkinek addig mig nem tapasztalom a szándékos átverést. De sajna mint a felvetett probléma is mutatja 2 azonos nema 17 motor sem azonos bekötésü belül hiába a csatik azonossága és a vezetékelés.
Mégegyszer köszönöm a segítséget mert megy a léptető.
az hogy használok orsót még nem jelenti hogy tudok csinálni
azt hogy az áttétet kiszámoljam az nem gond mert a fokból kitudtam számolni a léptetést, azt viszont nem tudtam hogy 4 mm mozdul az orsó 1 körre mivel én csak a menetemelkedést számoltam a 2 mm de ez nekem nem lényeges mert nekem az átmérők kellenek hogy a faragnivaló csövem is ugy mozogjon mint ha sik felület lenne és ez megoldgató ugy nálam hogy gumi görgőket hajtok meg és igy nem számít a cső átmérője csak a z beállításnál
tévedésem a menet miatt meg 2 x finomabb mozgást hozott volna ami megint csak 1 hetet visszavett volna mig megoldódik
a gondom ott hogy szakmai információ a neten rengeteg van de mind englis, én meg csak a magyart értem, hiába van tolmácsprogi ha a szakmai szavakat nem érthetőre hozza ki.
Ezért kérdezek és halgatom meg azokat akik értik. nem szégyelek kérdezni. nincs olyan ember aki mindenhez ért és nem is lessz. Hiába nézek utánna ha csak csepegtetett részinformációk vannak. Ezért hiszek bárkinek addig mig nem tapasztalom a szándékos átverést. De sajna mint a felvetett probléma is mutatja 2 azonos nema 17 motor sem azonos bekötésü belül hiába a csatik azonossága és a vezetékelés.
Mégegyszer köszönöm a segítséget mert megy a léptető.
Cím: Re:Léptetőmotor
Írta: 8c3s5ew4i Dátum 2019 május 27, 22:55
Írta: 8c3s5ew4i Dátum 2019 május 27, 22:55
nem rossz a hozzáállásom
Ha kocsit akarsz vezetni akkor megtanulod az adagoló a generátor és a klíma szerelését? Nemhiszem, megtanulod melyik szaki mit old meg a kocsidon és a telefonszámát és címét elmented :-)
Ha kocsit akarsz vezetni akkor megtanulod az adagoló a generátor és a klíma szerelését? Nemhiszem, megtanulod melyik szaki mit old meg a kocsidon és a telefonszámát és címét elmented :-)
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 május 28, 00:09
Írta: dtb Dátum 2019 május 28, 00:09
Nem vitatom a leírtakat, de nekem a "de nem érteni akarok hozzá, hanem csak összehozni magamnak" kicsit sántított. Vagy meg akarom érteni, vagy kihívom a szerelőt. A köztes állapot a "majd lesz valahogy", meg az okos nézés, fejvakarással. Nem cseszegetni akarlak, félre ne értsd, csak akár hobby, akár pénzkeresés, illik előtte azért ismerkedni vele, de utólag sem késő :-)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 május 28, 21:01
Írta: 000000000 Dátum 2019 május 28, 21:01
Jó, hogy méricskéltél, csak üdvözölni tudom.[#eljen]
Viszont ezeknek a digitális "trükközésű" csendes meghajtóknak nagy ám a hátránya is, mert pl. egy step jel esetén "szegénykém" nem tudja (elvi alapon nem is tudhatja) mit csináljon, és totál lebutul dinamikailag, mire meg is lépi teljesen, sehol sincs az ilyen hajtás a hagyományoshoz képest.
A másik problémájuk, hogy az egységugrást nehezen viselik, és nagyon sokáig hullámos, lüktető a valós pozíciójuk alakulása, ami sajnos a munkadarab kontúrján is megmutatkozik CNC megmunkáláskor. A Robsy weboldal motordinamikai mérések fejezténél láhatsz pár összehasonlító mérési eredményt a témával kapcsolatban is.
Viszont ezeknek a digitális "trükközésű" csendes meghajtóknak nagy ám a hátránya is, mert pl. egy step jel esetén "szegénykém" nem tudja (elvi alapon nem is tudhatja) mit csináljon, és totál lebutul dinamikailag, mire meg is lépi teljesen, sehol sincs az ilyen hajtás a hagyományoshoz képest.
A másik problémájuk, hogy az egységugrást nehezen viselik, és nagyon sokáig hullámos, lüktető a valós pozíciójuk alakulása, ami sajnos a munkadarab kontúrján is megmutatkozik CNC megmunkáláskor. A Robsy weboldal motordinamikai mérések fejezténél láhatsz pár összehasonlító mérési eredményt a témával kapcsolatban is.
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2019 május 28, 22:47
Írta: B.Zoltán Dátum 2019 május 28, 22:47
Egyet értek, hogy a dinamika az sérül, és olyan helyeken ahol fontos a gyors reagálás, egységugrás, ott nem előnyös ez a digitális vezérlő.
Viszont a menetvágásnál a mi esetünkben előnyösebb a csendes rezonancia mentes járása miatt.
A késleltetése egy step jel akár lehet is, mert a jövőbe nem lát szegényke.
Ebből úgy néz ki, hogy hátrány nem lesz, de nem kell növelni a mikrolépést tovább a csendes járás érdekében, mert akár 800 lép/ford esetén is szépen megy.
Az előtolásnál javulás tapasztalható, mert ott nagyon lassan kell lépkedni a motornak.
Emlékszem a méréseidre, gondoltam is rá, hogy jó lenne egy ilyen jellegű mérés, mert az én műszer parkom az nagyon szegényes.
Azért vannak érdekes dolgok, ezzel a meghajtóval 1800fod/percig ment egyik motor, a másikkal csak 1200-ig.
Tovább nyúzom, a gyakorlatban akár kiderülhetnek még disznóságok is, de eddig eltekintve a dinamikát, egységugrást, használhatónak tűnik.
Viszont a menetvágásnál a mi esetünkben előnyösebb a csendes rezonancia mentes járása miatt.
A késleltetése egy step jel akár lehet is, mert a jövőbe nem lát szegényke.
Ebből úgy néz ki, hogy hátrány nem lesz, de nem kell növelni a mikrolépést tovább a csendes járás érdekében, mert akár 800 lép/ford esetén is szépen megy.
Az előtolásnál javulás tapasztalható, mert ott nagyon lassan kell lépkedni a motornak.
Emlékszem a méréseidre, gondoltam is rá, hogy jó lenne egy ilyen jellegű mérés, mert az én műszer parkom az nagyon szegényes.
Azért vannak érdekes dolgok, ezzel a meghajtóval 1800fod/percig ment egyik motor, a másikkal csak 1200-ig.
Tovább nyúzom, a gyakorlatban akár kiderülhetnek még disznóságok is, de eddig eltekintve a dinamikát, egységugrást, használhatónak tűnik.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 május 29, 09:39
Írta: 000000000 Dátum 2019 május 29, 09:39
A menetkészítés egy szinkron vezérlési feladat. Nem árt, ha a motorvezérlő kellően dinamikus, és arra is nyitott, ha hirtelen megváltozik a főorsó fordulatszáma pl. azért, mert egy hitvány frekiváltó direkhajtással alacsony fordulaton megtorpan, amikor fogásba kerül a menetkés. Vagy az se mindegy, hogy ha kell, a kés kirántása milyen dinamikával történik egy speciális munkadarabnál.
De mint minden műszaki kérdésnél általában itt is az van, hogy vannak előnyök/hátrányok, és az optimalizálási feltételek döntik el, mi a jobb hajtás megoldás.
Ha pedig egyszer Bp. környékén jársz, hozd el a kedvenc motorodat, motorhajtásodat, bemérjük egységugrás tesztekre 0.1 és 6 1/s fordulatszám tartományban. A kapott mérési eredmények összevethetők más meghajtókkal, motorokkal is (amiket már bemértem), ha megnyitjuk azokat egy diagramban a grafikus kiértékeléskor, erre ITT (http://www.robsy.hu/te2/tem2.htm) is láthatsz pár példát.
De mint minden műszaki kérdésnél általában itt is az van, hogy vannak előnyök/hátrányok, és az optimalizálási feltételek döntik el, mi a jobb hajtás megoldás.
Ha pedig egyszer Bp. környékén jársz, hozd el a kedvenc motorodat, motorhajtásodat, bemérjük egységugrás tesztekre 0.1 és 6 1/s fordulatszám tartományban. A kapott mérési eredmények összevethetők más meghajtókkal, motorokkal is (amiket már bemértem), ha megnyitjuk azokat egy diagramban a grafikus kiértékeléskor, erre ITT (http://www.robsy.hu/te2/tem2.htm) is láthatsz pár példát.
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2019 május 29, 23:56
Írta: B.Zoltán Dátum 2019 május 29, 23:56
Igen, egy ésszerű kompromisszumot muszáj kötni az embernek, ilyen a kés kiemelés most nekünk.
Köszönöm a felajánlásodat, ha közelebb lennénk egymáshoz élnék is vele.
Ilyen távolságokra ritkán mozdulok ki sajnos, de még előfordulhat az is.
Köszönöm a felajánlásodat, ha közelebb lennénk egymáshoz élnék is vele.
Ilyen távolságokra ritkán mozdulok ki sajnos, de még előfordulhat az is.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 június 13, 22:16
Írta: dtb Dátum 2019 június 13, 22:16
Kíváncsi lennék a véleményetekre, ki hogyan értelmezi az alábbi képet, ami a closed loopos kici kínai vezérlőm doksija. Ez alapján ki mit mond, a vezérlő step/dir jelek "active high", vagy "active low" típusúak?
Az már csak hab a tortán, hogy egy DIP kapcsolóval ez a logika beállítható/megfordítható...
Szóval, ki hogy értelmezi?
Bónusz kérdés: A t1, t2, t3, t4 microsec időket az UCCNC-ben hol lehet beállítani?
(https://hobbicncforum.hu/uploaded_images/2019/06/tn_qj2cc92b9xximkk09e9a_5978.jpg) (https://hobbicncforum.hu/uploaded_images/2019/06/qj2cc92b9xximkk09e9a_5978.jpg)
Az már csak hab a tortán, hogy egy DIP kapcsolóval ez a logika beállítható/megfordítható...
Szóval, ki hogy értelmezi?
Bónusz kérdés: A t1, t2, t3, t4 microsec időket az UCCNC-ben hol lehet beállítani?
(https://hobbicncforum.hu/uploaded_images/2019/06/tn_qj2cc92b9xximkk09e9a_5978.jpg) (https://hobbicncforum.hu/uploaded_images/2019/06/qj2cc92b9xximkk09e9a_5978.jpg)
Cím: Re:Léptetőmotor
Írta: dezsoe Dátum 2019 június 13, 23:01
Írta: dezsoe Dátum 2019 június 13, 23:01
A képen egyértelműen "active low" a step jel. Az időket külön sehol nem tudod állítani, együtt a kernel frekvencia határozza meg.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 június 13, 23:15
Írta: dtb Dátum 2019 június 13, 23:15
Igen, én is így gondolom, viszont akkor hibás a kép. (feszültség értékek)
Az ENA láb viszont pont ellenkező, vagy annak ellenkező lenne a logikája?
Az ENA láb viszont pont ellenkező, vagy annak ellenkező lenne a logikája?
Cím: Re:Léptetőmotor
Írta: dezsoe Dátum 2019 június 13, 23:46
Írta: dezsoe Dátum 2019 június 13, 23:46
Igen, a feliratok némiképpen ellentmondanak egymásnak. :) Az ENA az magasra aktív.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 június 14, 08:03
Írta: dtb Dátum 2019 június 14, 08:03
Kb. 1 heti levelezésembe került, mire megküldte a kinai a pdf-t, de mindenképp meg akartam nézni, mi a gyártói javaslat a beállításokra.
Nekem is egyértelműen "Active Low" típusnak tűnik, viszont a default gyári beállításoknál épp az ellenkezője volt/van beállítva, ami elbizonytalanított:
"SW1 is used for setting the activate edge of the input signal, "off" means the activate edge is the rising edge"
Azóta már az adott szövegrészre rákeresve megtaláltam más gyártóknál is ezt a leírást, más helyeken a feszültség értékek jók, tehát az már biztos, hogy a leírás ezen része hibás.
Tehát a jelenlegi állapot szerint a javasolt az active low(?), ehhez képest a gyári default az active high(!).
Ezek szerint teljesen mindegy a driver szempontjából, hogy mire van beállítva?
Ha viszont így van, akkor melyik a jobb választás? Low vagy a High?
Nekem is egyértelműen "Active Low" típusnak tűnik, viszont a default gyári beállításoknál épp az ellenkezője volt/van beállítva, ami elbizonytalanított:
"SW1 is used for setting the activate edge of the input signal, "off" means the activate edge is the rising edge"
Azóta már az adott szövegrészre rákeresve megtaláltam más gyártóknál is ezt a leírást, más helyeken a feszültség értékek jók, tehát az már biztos, hogy a leírás ezen része hibás.
Tehát a jelenlegi állapot szerint a javasolt az active low(?), ehhez képest a gyári default az active high(!).
Ezek szerint teljesen mindegy a driver szempontjából, hogy mire van beállítva?
Ha viszont így van, akkor melyik a jobb választás? Low vagy a High?
Cím: Re:Léptetőmotor
Írta: dezsoe Dátum 2019 június 14, 08:44
Írta: dezsoe Dátum 2019 június 14, 08:44
Lényegében mindegy, de mivel bekapcsoláskor a vezérlő kimenetei alacsony szinten vannak, én felfutóra állítanám a meghajtót kikapcsolt active low pipával.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 június 14, 12:41
Írta: 000000000 Dátum 2019 június 14, 12:41
Az 1 hetet 5 percre redukáltam volna a helyedben.:)
Úgy, hogy egy 20 Ft-os IC-vel (pl. 555, 74HC14, .... stb.) készíthettél volna egy ~0.5 Hz-es bistabil multivibrátort, aminek jele meghajt egy ledet, és a léptető motormeghajtód step bemenetét is. Ezek után kezed a motortengelyen szemed a leden. Tökéletesen megállapítható, hogy pozitív vagy negatív élre történik a lépés.
Csak halkan jegyzem meg, a Robsy CNC vezérlőkhöz van ilyen élvezérlés megállapító bemérő program is, csak ugye ehhez már PC is kell.
Az meg nonszensz, hogy itt szinte mindeki össze-vissza pipálgat a setup menüpontokban a virtuális ketyvaszban, majd valahogy működik az a szerencsétlen CNC tengely, de közben fogalmunk a sincs a valóságról ebben hajtástechnikai alapkérdésben.
Úgy, hogy egy 20 Ft-os IC-vel (pl. 555, 74HC14, .... stb.) készíthettél volna egy ~0.5 Hz-es bistabil multivibrátort, aminek jele meghajt egy ledet, és a léptető motormeghajtód step bemenetét is. Ezek után kezed a motortengelyen szemed a leden. Tökéletesen megállapítható, hogy pozitív vagy negatív élre történik a lépés.
Csak halkan jegyzem meg, a Robsy CNC vezérlőkhöz van ilyen élvezérlés megállapító bemérő program is, csak ugye ehhez már PC is kell.
Az meg nonszensz, hogy itt szinte mindeki össze-vissza pipálgat a setup menüpontokban a virtuális ketyvaszban, majd valahogy működik az a szerencsétlen CNC tengely, de közben fogalmunk a sincs a valóságról ebben hajtástechnikai alapkérdésben.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 június 14, 13:16
Írta: dtb Dátum 2019 június 14, 13:16
Köszi a választ, de átsiklottál a lényegi részen.
1, Mint kiderült, hibás a gyári doksi,
2, A papíron javasolt beállításokkal pont ellentétes a gyári default beállítás.
Tehát gyakorlatilag a driver-en én állíthatom be, hogy felfutóra lépjen, vagy lefutóra.
A kérdésem az lett volna, hogy melyiket célszerű, ha már a gyári doksi ilyen trehány, illetve reménykedtem benne, hogy PRO és Kontra érveket fogok olvasni egyik vagy a másik mellett...
1, Mint kiderült, hibás a gyári doksi,
2, A papíron javasolt beállításokkal pont ellentétes a gyári default beállítás.
Tehát gyakorlatilag a driver-en én állíthatom be, hogy felfutóra lépjen, vagy lefutóra.
A kérdésem az lett volna, hogy melyiket célszerű, ha már a gyári doksi ilyen trehány, illetve reménykedtem benne, hogy PRO és Kontra érveket fogok olvasni egyik vagy a másik mellett...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 június 14, 16:53
Írta: 000000000 Dátum 2019 június 14, 16:53
Nem látom egész pontosan, mitől "trehány" a gyári doksi.
Én csak segíteni akartam, hogy műskor ne levelezzél bizonytalan adatokért hetekig, hanem mérjél 5 perc alatt a biztos eredményért.
Az meg teljesen mindegy, hogy utána közös anódos, vagy közös katódos bekötést alkalmazol a bemeneti optocsatolóknál, eleve a fölösleges leválasztó kártya ilyen téren is csak bajt okoz, és kényszer pályára vihet, bekavarhat.
A közös katódos megoldás jobban átlátható nekem, én ezt alkalmazom a rendszereimben.
Én csak segíteni akartam, hogy műskor ne levelezzél bizonytalan adatokért hetekig, hanem mérjél 5 perc alatt a biztos eredményért.
Az meg teljesen mindegy, hogy utána közös anódos, vagy közös katódos bekötést alkalmazol a bemeneti optocsatolóknál, eleve a fölösleges leválasztó kártya ilyen téren is csak bajt okoz, és kényszer pályára vihet, bekavarhat.
A közös katódos megoldás jobban átlátható nekem, én ezt alkalmazom a rendszereimben.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 június 16, 22:32
Írta: dtb Dátum 2019 június 16, 22:32
A feszültség szintek rosszul vannak megadva, és az egész más gyártók doksijából lett összeollózva.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 augusztus 12, 16:09
Írta: 000000000 Dátum 2019 augusztus 12, 16:09
Ez egy ~ 5 másodpercig tartó léptető motoros hajtás teszt hangja. (http://www.robsy.hu/te2/robsy-motortest-voice1.wma)
Ha pedig ezt a folyamatot kielemezzük közben a legújabb fejlesztésű Robsy motordinamikai mérőrendszerrel, egy csodálatos, rendkívül tanulságos valós kép tárul elénk.
(http://www.robsy.hu/te2/robsy-test-resonance1600.gif)
Azt pedig mindenki magában eldöntheti, hogy az eddigi műszaki elképzelése, ismerete egy ilyen eseményről és a bemért, megmutatott valóság mekkora mértékben egyezik meg.
Ha pedig ezt a folyamatot kielemezzük közben a legújabb fejlesztésű Robsy motordinamikai mérőrendszerrel, egy csodálatos, rendkívül tanulságos valós kép tárul elénk.
(http://www.robsy.hu/te2/robsy-test-resonance1600.gif)
Azt pedig mindenki magában eldöntheti, hogy az eddigi műszaki elképzelése, ismerete egy ilyen eseményről és a bemért, megmutatott valóság mekkora mértékben egyezik meg.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 augusztus 12, 20:09
Írta: dtb Dátum 2019 augusztus 12, 20:09
Ez egy nagyon szép kép, de egy kicsit bővebben is írhatnál arról, hogy mit kell látnunk, melyik tengely, melyik érték mit takar, mert enélkül mi laikusok csak annyit látunk, hogy ez egy nagyon szép kép :-)
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2019 augusztus 12, 20:43
Írta: PSoft Dátum 2019 augusztus 12, 20:43
Tibor, ugye megbocsájtod nekem...[#kacsint]
Én egy szép, augusztusi hullócsillagot vélek felfedezni a Balaton fölött, az amúgy tényleg látványos képen.[#wave]
Én egy szép, augusztusi hullócsillagot vélek felfedezni a Balaton fölött, az amúgy tényleg látványos képen.[#wave]
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 augusztus 12, 22:11
Írta: dtb Dátum 2019 augusztus 12, 22:11
[#taps][#eljen][#kacsint]
Cím: Re:Léptetőmotor
Írta: RJancsi Dátum 2019 szeptember 05, 19:34
Írta: RJancsi Dátum 2019 szeptember 05, 19:34
Ha már volt korábban akkor elnézést, nekem új. Többször volt szó róla, hogy ha valaki olyan gépet épít ahol ugyanazt a tengelyt két léptetőmotorral mozgatja, akkor mi a jobb: motoronként külön meghajtó és a step/dir jelek szétosztása, vagy egy meghajtó és a motorok párhuzamos kötése. Ezzel a megoldással most találkoztam először: egy meghajtó és a léptecsek sorba vannak kötve. (https://www.instructables.com/id/Wiring-Your-Z-Stepper-Motors-in-Series/) Találkoztatok már ilyennel? Netán kipróbálta valaki? Vélemény/tapasztalatok?
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 szeptember 05, 21:29
Írta: dtb Dátum 2019 szeptember 05, 21:29
A "hivatalos" megoldás az lenne, hogy a vezérlő programodban beállítod, hogy az a motor "slave" és persze meg kell hozzá adni az elsődleges tengelyt is. Igy a vezérlő, pl. MACH3, vagy az UCCNC, ha kiad egy lépést az elsődleges léptetőre, akkor kiadja a slave motorra is.
Elvileg ugyanezt éred el hardveresen azzal, ha az enable, a step, meg a dir jeleket két összetartozó motor vezérlőre vezeted, de vigyázz a forgásirányra.
Elvileg ugyanezt éred el hardveresen azzal, ha az enable, a step, meg a dir jeleket két összetartozó motor vezérlőre vezeted, de vigyázz a forgásirányra.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 szeptember 05, 23:19
Írta: 000000000 Dátum 2019 szeptember 05, 23:19
Ennek a megoldásnak mindig lesz nagy hátrány párhuzamos/soros kötés kérdés melyik tényezőt áldozod fel nyomaték vagy sebesség?!
Legjobb meghajtó motorokét és mehet egy vezérlőjel egyszere mindkét meghajtónak és megmarad a motorod összes gyári tényezői is amit nem kell beáldozni le rontani...[#eljen]
Legjobb meghajtó motorokét és mehet egy vezérlőjel egyszere mindkét meghajtónak és megmarad a motorod összes gyári tényezői is amit nem kell beáldozni le rontani...[#eljen]
Cím: Re:Léptetőmotor
Írta: 2f428kduf Dátum 2019 szeptember 06, 07:21
Írta: 2f428kduf Dátum 2019 szeptember 06, 07:21
Az első gépemnél nagyon "okos" akartam lenni, az Y tengelyt két motorral hajtottam, egy meghajtóval. Az A és B motor megfelelő tekercsei sorba voltak kötve. Mivel két motor hajtott egy tengelyt, nem ijedeztem, hogy nem bírják. Nem is az lett a baj, hanem előbb-utóbb befeszült, megszorult a két orsó, valószínű valamelyik motor lépést vesztett. Természetesen a legkellemetlenebb helyzetben. Kínomban összekötöttem a két Y-t, egy szíjjal, meg is szűnt az akadozás, de így mi értelme a két motornak. Azóta ezen a gépen is, a következő nagyobbon is két orsó, egy motor van. Hiba nélkül mennek.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 szeptember 06, 07:36
Írta: dtb Dátum 2019 szeptember 06, 07:36
..és akkor még azt is tegyük hozzá, hogy ha az egyik motor lépést veszt, a másik meg megy, akkor a lépésvesztett motor dinamóként fog működni, és közös áramkör esetén forgásiránytól függően, de kiszámíthatatlan hatásai vannak.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 szeptember 06, 08:14
Írta: 000000000 Dátum 2019 szeptember 06, 08:14
Ezeket kár volt leírnod, mert alig van benne korrekt műszaki valóságnak megfelelő tartalom.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 szeptember 06, 08:15
Írta: dtb Dátum 2019 szeptember 06, 08:15
Akkor talán ha megtudhatjuk tőled a valóságot? A lehetőség adott.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 szeptember 06, 08:20
Írta: 000000000 Dátum 2019 szeptember 06, 08:20
Egyébként többször megfigyeltem már, és erre a Fórumra kifejezettten jellemező, hogy ötletelés folyik, persze magabiztos kijelentések mentén. Ennek így semmi értelme egy műszaki Fórumon, jó lenne, ha mindenki csak akkor írna választ, ha ért is a támához, és halálbitosan tényeket, valóságot ír, és nem azt, amit hisz, vagy tévesen tud, vagy csak mert folyamatos netes íráskényszere van, és mindenhez hozzá akar kotyogni. Egy kis önmérséklet, szakmai tudászint önismeret nem ártana Uraim!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 szeptember 06, 08:22
Írta: 000000000 Dátum 2019 szeptember 06, 08:22
Először te válaszoljál.
1. Mióta dinamó egy léptető motor?
1. Mióta dinamó egy léptető motor?
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 szeptember 06, 08:42
Írta: dtb Dátum 2019 szeptember 06, 08:42
Azt írtam: "motor dinamóként fog működni" vagyis ha egy léptetőmotort manuálisan, vagy más módon megforgatsz, akkor a mérhető feszültség generálódik a motor vezetékein. Mivel a kérdés az volt, hogy jó e, ha össze van kötve két léptetőmotor sorosan/párhuzamosan, nem azon lovagolnék, hogy léptetőmotornak hívják, vagy dinamónak, hanem azon, hogy ez igaz, vagy nem.
Az, hogy nagyon szabatosan, korrekt műszaki tartalommal ezt más hogyan fogalmazná meg, azzal én nem nagyon tudok mit kezdeni, mert először le kéne írni, és utána lehet róla beszélgetni.
Az, hogy nagyon szabatosan, korrekt műszaki tartalommal ezt más hogyan fogalmazná meg, azzal én nem nagyon tudok mit kezdeni, mert először le kéne írni, és utána lehet róla beszélgetni.
Cím: Re:Léptetőmotor
Írta: fpd0kbd4 Dátum 2019 szeptember 06, 08:45
Írta: fpd0kbd4 Dátum 2019 szeptember 06, 08:45
Jól gondolom, hogy az említett összeállításban,lépésvesztés esetén sem áll fönn a generátor üzemmód feltétele?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 szeptember 06, 10:36
Írta: 000000000 Dátum 2019 szeptember 06, 10:36
Te kezded el nekem megmagyarázni, mit csinál egy léptető motor kézi forgatás esetén? Vicces.[#nyes]
Így aztán bocsi, de azzal az emberrel nekem nincs további vitám, aki még mindig magyarázkodik, védi a védhetetlent, és nem érti, mi az alapvető különbség a dinamó és a generátor között.
További szép napot![#wave]
Így aztán bocsi, de azzal az emberrel nekem nincs további vitám, aki még mindig magyarázkodik, védi a védhetetlent, és nem érti, mi az alapvető különbség a dinamó és a generátor között.
További szép napot![#wave]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 szeptember 06, 10:44
Írta: 000000000 Dátum 2019 szeptember 06, 10:44
Először azt kell tisztázni,a lépésvesztés alatt te mit értesz, mert itt is sok a tévhit.
Légyszi írjál egy konkrét esetet az elképzelésed alapján (x, y behelyettesítéssel), hogy x mikrostep esetén y lépést veszít a motor, amire a kérdésed vonatkozott arra az esetre.
Ezen eset tisztázása után lehet válaszolni a kérdésedre.
Légyszi írjál egy konkrét esetet az elképzelésed alapján (x, y behelyettesítéssel), hogy x mikrostep esetén y lépést veszít a motor, amire a kérdésed vonatkozott arra az esetre.
Ezen eset tisztázása után lehet válaszolni a kérdésedre.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 szeptember 06, 10:46
Írta: dtb Dátum 2019 szeptember 06, 10:46
Volt egy konkrét kérdés egy fórumtársunktól. Négy hozzászólásod született ehhez kapcsolódóan.
Neked is szép napot![#taps]
Neked is szép napot![#taps]
Cím: Re:Léptetőmotor
Írta: RJancsi Dátum 2019 szeptember 06, 10:56
Írta: RJancsi Dátum 2019 szeptember 06, 10:56
OFF
Nincs szánalmasabb annál, mint amikor egy tanár folyton azt bizonygatja a diákoknak, hogy okosabb náluk.
Az nem tanár.
Nem az a feladata, hogy kioktassa, lesajnálja a nála tudatlanabbakat, hanem hogy "leereszkedve" azok felfogó képességéhez megpróbálja átadni tudását. És akkor nem megvetés hanem tisztelet fogja övezni.
Kinek nem inge...
ON
Nincs szánalmasabb annál, mint amikor egy tanár folyton azt bizonygatja a diákoknak, hogy okosabb náluk.
Az nem tanár.
Nem az a feladata, hogy kioktassa, lesajnálja a nála tudatlanabbakat, hanem hogy "leereszkedve" azok felfogó képességéhez megpróbálja átadni tudását. És akkor nem megvetés hanem tisztelet fogja övezni.
Kinek nem inge...
ON
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 szeptember 06, 10:58
Írta: 000000000 Dátum 2019 szeptember 06, 10:58
"Négy hozzászólásod született ehhez kapcsolódóan."
Már megint tévedsz. A négy mióta egyenlő a nullával?[#csodalk]
Ugyanis egészen pontosan én a kérdés feltevőnek (RJancsi) még semmit nem írtam, hanem elsősorban arra a dezinformációra, szakmaiatlanságra reagáltam, amit te írtál neki válaszként.
Már megint tévedsz. A négy mióta egyenlő a nullával?[#csodalk]
Ugyanis egészen pontosan én a kérdés feltevőnek (RJancsi) még semmit nem írtam, hanem elsősorban arra a dezinformációra, szakmaiatlanságra reagáltam, amit te írtál neki válaszként.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 szeptember 06, 11:26
Írta: dtb Dátum 2019 szeptember 06, 11:26
Én csak amatőr hobbysta vagyok, beismerem, számomra ez nem jelent lelki válságot. Szívesen tanulok mindenkitől, és érdekel mások véleménye, (emiatt még akkor is kérdezek, ha esetleg nem kéne) ez szerintem túlélhető, megbocsájtható emberi "gyarlóság", viszont mivel szerinted - így írtad: elsősorban arra a dezinformációra, szakmaiatlanságra reagáltam, amit te írtál neki válaszként." - nem jó válaszokat adtam, a lehető legtiszteletteljesebben megkérlek, hogy elemezd ki a válaszaimat, itt szégyenüljek meg mindenki előtt, és tanuljunk belőle közösen, VÁLLALOM! [#taps]
Hogy ne kelljen visszaidézned, ide másolom neked újra, és szépen kérlek, tedd meg a kedvemért, hogy bejelölöd, szerinted melyik nem volt szakmai, vagy korrekt.
A "hivatalos" megoldás az lenne, hogy a vezérlő programodban beállítod, hogy az a motor "slave" és persze meg kell hozzá adni az elsődleges tengelyt is. Igy a vezérlő, pl. MACH3, vagy az UCCNC, ha kiad egy lépést az elsődleges léptetőre, akkor kiadja a slave motorra is.
Elvileg ugyanezt éred el hardveresen azzal, ha az enable, a step, meg a dir jeleket két összetartozó motor vezérlőre vezeted, de vigyázz a forgásirányra.
vagy ez?
..és akkor még azt is tegyük hozzá, hogy ha az egyik motor lépést veszt, a másik meg megy, akkor a lépésvesztett motor dinamóként fog működni, és közös áramkör esetén forgásiránytól függően, de kiszámíthatatlan hatásai vannak.
...és esetleg lehet, hogy tényleg így van??? Én már nem is merem érteni.
Hogy ne kelljen visszaidézned, ide másolom neked újra, és szépen kérlek, tedd meg a kedvemért, hogy bejelölöd, szerinted melyik nem volt szakmai, vagy korrekt.
A "hivatalos" megoldás az lenne, hogy a vezérlő programodban beállítod, hogy az a motor "slave" és persze meg kell hozzá adni az elsődleges tengelyt is. Igy a vezérlő, pl. MACH3, vagy az UCCNC, ha kiad egy lépést az elsődleges léptetőre, akkor kiadja a slave motorra is.
Elvileg ugyanezt éred el hardveresen azzal, ha az enable, a step, meg a dir jeleket két összetartozó motor vezérlőre vezeted, de vigyázz a forgásirányra.
vagy ez?
..és akkor még azt is tegyük hozzá, hogy ha az egyik motor lépést veszt, a másik meg megy, akkor a lépésvesztett motor dinamóként fog működni, és közös áramkör esetén forgásiránytól függően, de kiszámíthatatlan hatásai vannak.
...és esetleg lehet, hogy tényleg így van??? Én már nem is merem érteni.
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2019 szeptember 06, 12:25
Írta: jani300 Dátum 2019 szeptember 06, 12:25
Szia !
"Én csak amatőr hobbysta vagyok, beismerem, számomra ez nem jelent lelki válságot. Szívesen tanulok mindenkitől, és érdekel mások véleménye, (emiatt még akkor is kérdezek, ha esetleg nem kéne) ez szerintem túlélhető, megbocsájtható emberi "gyarlóság" " Evvel egyetértek ,én is vagyok evvel valahogy .
A lépésvesztést úgy gondolom hogyha elveszik néhány lépés az villamos problémát nem okoz .
A beszorult mechanika miatt viszont produkálhat érdekes dolgokat .
Kiváncsi vagyok a szakszerű magyarázatra ezek után én is .
"Én csak amatőr hobbysta vagyok, beismerem, számomra ez nem jelent lelki válságot. Szívesen tanulok mindenkitől, és érdekel mások véleménye, (emiatt még akkor is kérdezek, ha esetleg nem kéne) ez szerintem túlélhető, megbocsájtható emberi "gyarlóság" " Evvel egyetértek ,én is vagyok evvel valahogy .
A lépésvesztést úgy gondolom hogyha elveszik néhány lépés az villamos problémát nem okoz .
A beszorult mechanika miatt viszont produkálhat érdekes dolgokat .
Kiváncsi vagyok a szakszerű magyarázatra ezek után én is .
Cím: Re:Léptetőmotor
Írta: RJancsi Dátum 2019 szeptember 06, 12:53
Írta: RJancsi Dátum 2019 szeptember 06, 12:53
Megvallom villamos dolgokban elég tudatlan vagyok, nem szakmám, autodidakta módon tanultam (sokszor a saját káromon) ameddig eljutottam, hogy már 4 többé-kevésbé működő cnc gépet összeraktam. (2 gravírozó, 2 lézer).
A tojás pingálót és a 3D nyomtatót nem sorolom ide, azok "gyári" alkatrészekből és tervekből születtek.
És azt is bevallom, számomra időnként hasznosabbak a hobbysta vélemények, tapasztalatok olyanok szájából/tollából, akiket nem gátol a "tudás". Egy ártatlan kérdést tettem fel, van-e valakinek tapasztalata, véleménye a léptecsek sorba kötéséről. Köszönöm a pozitív hozzászólásokat!
A tojás pingálót és a 3D nyomtatót nem sorolom ide, azok "gyári" alkatrészekből és tervekből születtek.
És azt is bevallom, számomra időnként hasznosabbak a hobbysta vélemények, tapasztalatok olyanok szájából/tollából, akiket nem gátol a "tudás". Egy ártatlan kérdést tettem fel, van-e valakinek tapasztalata, véleménye a léptecsek sorba kötéséről. Köszönöm a pozitív hozzászólásokat!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 szeptember 06, 14:16
Írta: 000000000 Dátum 2019 szeptember 06, 14:16
y eljátszótam mindkét verziót amit kérdeztél 2 motor 2 vezérlővel nincs gond egyenlőre szoftveres szinkron van jelenleg...[#vigyor]
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2019 szeptember 06, 15:43
Írta: PSoft Dátum 2019 szeptember 06, 15:43
Gondolom, tegnap kora este óta, türelmetlenül vártál erre a pillanatra.
Persze szakavatottként, válaszolhattál volna [#3111@RJancsi] feltett kérdésére is, de valamiért ez...megint elmaradt.
Nem fogsz Te már megváltozni.
Mint ahogy...én sem.
Persze szakavatottként, válaszolhattál volna [#3111@RJancsi] feltett kérdésére is, de valamiért ez...megint elmaradt.
Nem fogsz Te már megváltozni.
Mint ahogy...én sem.
Cím: Re:Léptetőmotor
Írta: MoparMan Dátum 2019 szeptember 06, 19:08
Írta: MoparMan Dátum 2019 szeptember 06, 19:08
na a B verzió a jelen user kontextusában még nem történt sosem. nem is fog. [#vigyor]
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2019 szeptember 15, 13:09
Írta: s7manbs8 Dátum 2019 szeptember 15, 13:09
Egy tranyoval is lehet hajtani stepper motort:
Cím: Re:Léptetőmotor
Írta: 73bk3icgz Dátum 2019 szeptember 18, 07:43
Írta: 73bk3icgz Dátum 2019 szeptember 18, 07:43
Szia mennyiért adod a léptető motort? Nekem 1.8 fog minimum 1Nm kell.
üdv. Ambrus
üdv. Ambrus
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2019 szeptember 18, 16:13
Írta: PSoft Dátum 2019 szeptember 18, 16:13
No, ez jó nagy baromság lett...[#falbav]
Jelöljétek törlésre.
Jelöljétek törlésre.
Cím: Re:Léptetőmotor
Írta: pistikeid Dátum 2019 szeptember 20, 07:23
Írta: pistikeid Dátum 2019 szeptember 20, 07:23
Sziasztok
Szeretném megkérdezni hogy kinek milyen tapasztalata van a microstepp-el gondolok itt a pontosságra a mechanikai áttételekkel szemben, a nyomaték a kérdésben nem lényeges.
Az elektronikus áttétel 32x-es egy szijas mechanikát mozgatna.
A tapasztalatok érdekelnének.
Előre is köszönöm
Üdv
Szeretném megkérdezni hogy kinek milyen tapasztalata van a microstepp-el gondolok itt a pontosságra a mechanikai áttételekkel szemben, a nyomaték a kérdésben nem lényeges.
Az elektronikus áttétel 32x-es egy szijas mechanikát mozgatna.
A tapasztalatok érdekelnének.
Előre is köszönöm
Üdv
Cím: Re:Léptetőmotor
Írta: 5yfyyj67 Dátum 2019 szeptember 30, 11:30
Írta: 5yfyyj67 Dátum 2019 szeptember 30, 11:30
Sziasztok,
Van pár ilyen motorom (Jenaer), de nem nagyon tudom eldönteni róluk, hogy most ezek szervók vagy enkóderes léptetők.
Valaki tud ebben segíteni? Köszi!
17H19-0230 (https://www.jat-gmbh.de/fileadmin/website/files/englisch/Datenblatt/mot/2_1_17H_e.pdf)
23S41-0650 (https://www.jat-gmbh.de/fileadmin/website/files/englisch/Datenblatt/mot/2_2_23S_e.pdf)
34S50x-700 (https://www.jat-gmbh.de/fileadmin/website/files/englisch/Datenblatt/mot/2_4_34S50x_e.pdf)
Van pár ilyen motorom (Jenaer), de nem nagyon tudom eldönteni róluk, hogy most ezek szervók vagy enkóderes léptetők.
Valaki tud ebben segíteni? Köszi!
17H19-0230 (https://www.jat-gmbh.de/fileadmin/website/files/englisch/Datenblatt/mot/2_1_17H_e.pdf)
23S41-0650 (https://www.jat-gmbh.de/fileadmin/website/files/englisch/Datenblatt/mot/2_2_23S_e.pdf)
34S50x-700 (https://www.jat-gmbh.de/fileadmin/website/files/englisch/Datenblatt/mot/2_4_34S50x_e.pdf)
Cím: Re:Léptetőmotor
Írta: robokacsa Dátum 2019 szeptember 30, 12:39
Írta: robokacsa Dátum 2019 szeptember 30, 12:39
Első léptető.
Cím: Re:Léptetőmotor
Írta: robokacsa Dátum 2019 szeptember 30, 12:40
Írta: robokacsa Dátum 2019 szeptember 30, 12:40
Mindhárom stepper.
Cím: Re:Léptetőmotor
Írta: 5yfyyj67 Dátum 2019 szeptember 30, 13:36
Írta: 5yfyyj67 Dátum 2019 szeptember 30, 13:36
Köszi! :) Ez jó hír nekem.
A 17-es 23-ast akkor meghajthatom ezzel?:
DM556D (https://variometrum.hu/elektronika-kategoria/leptetomotor-meghajto-kategoria/digitalis_leptetomotor_meghajto_5_6a_dm556d)
A34-eseknek milyen meghajtó kellene?
Illetve ha enkódert is használni akarnám, szóba jöhet más gyártó vezérlője is? pl ezek: HSSxx (https://variometrum.hu/elektronika-kategoria/leptetomotor-meghajto-kategoria/Enkoderes_leptetomotor_meghajto_HSS42)
Vagy csak a gyári ecovario 114/214?
A 17-es 23-ast akkor meghajthatom ezzel?:
DM556D (https://variometrum.hu/elektronika-kategoria/leptetomotor-meghajto-kategoria/digitalis_leptetomotor_meghajto_5_6a_dm556d)
A34-eseknek milyen meghajtó kellene?
Illetve ha enkódert is használni akarnám, szóba jöhet más gyártó vezérlője is? pl ezek: HSSxx (https://variometrum.hu/elektronika-kategoria/leptetomotor-meghajto-kategoria/Enkoderes_leptetomotor_meghajto_HSS42)
Vagy csak a gyári ecovario 114/214?
Cím: Re:Léptetőmotor
Írta: robokacsa Dátum 2019 szeptember 30, 13:38
Írta: robokacsa Dátum 2019 szeptember 30, 13:38
Konkrét adatot nem néztem, de működésre bírni biztosan jó az első vezérlő is.
Cím: Re:Léptetőmotor
Írta: 5yfyyj67 Dátum 2019 október 01, 20:18
Írta: 5yfyyj67 Dátum 2019 október 01, 20:18
Ilyen encoder van az összesen:
SINCOS encoder, programmable resolution,
max. 128 000 inc/rev, servo amplifier ECOVARIO®114/214
Van egy ecovario 114-em, de fogalmam sincs lehet-e vezérelni step/dir-rel.
SINCOS encoder, programmable resolution,
max. 128 000 inc/rev, servo amplifier ECOVARIO®114/214
Van egy ecovario 114-em, de fogalmam sincs lehet-e vezérelni step/dir-rel.
Cím: Re:Léptetőmotor
Írta: kmajer Dátum 2019 október 02, 08:32
Írta: kmajer Dátum 2019 október 02, 08:32
Ecostep 200-as hajtásokat tudok adni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 03, 09:53
Írta: 000000000 Dátum 2019 november 03, 09:53
A Robsy motordinamikai mérőrendszer segítségével egy példát mutatok a virtuális mesevilág és a szomorú műszaki valóság közti hatalmas különbségre.
A mérés során a vezérlő program egy 10 mm-es elmozdulást 20 mm/s (1200 mm/min) előtolással 0.3 m/s2 gyorsulással hajt végre egy 1 Nm-es léptető motorral. A motor 1:1-ben fogazott szíj hajtással (T2.5/16 kerék fogszám) mozgat ~1.5 kg tömeget. A mérési pont a hajtás lánc legvége, a lineárisan elmozduló szán. Jö közelítéssel a 3D nyomtatók, CNC lézergravírozók zöme egy ilyesmi hajtás lánccal valósítják meg az elmozdulásokat.
A programozott sebesség zöld, a gyorsulás lila, a mért valós sebesség piros, a gyorsulás világos kék színű a képen.
Égbekiáltóak és igen tanulságosak a vágyálmak (én ezeket ugye virtuális csicsavilágnak szoktam hívni) és a VALÓSÁG közti különbségek annak összes műszaki következményével.
(https://hobbicncforum.hu/uploaded_images/2019/11/tn_8d3bv09n90tqm3en83nx_4936.gif) (https://hobbicncforum.hu/uploaded_images/2019/11/8d3bv09n90tqm3en83nx_4936.gif)
A mérés során a vezérlő program egy 10 mm-es elmozdulást 20 mm/s (1200 mm/min) előtolással 0.3 m/s2 gyorsulással hajt végre egy 1 Nm-es léptető motorral. A motor 1:1-ben fogazott szíj hajtással (T2.5/16 kerék fogszám) mozgat ~1.5 kg tömeget. A mérési pont a hajtás lánc legvége, a lineárisan elmozduló szán. Jö közelítéssel a 3D nyomtatók, CNC lézergravírozók zöme egy ilyesmi hajtás lánccal valósítják meg az elmozdulásokat.
A programozott sebesség zöld, a gyorsulás lila, a mért valós sebesség piros, a gyorsulás világos kék színű a képen.
Égbekiáltóak és igen tanulságosak a vágyálmak (én ezeket ugye virtuális csicsavilágnak szoktam hívni) és a VALÓSÁG közti különbségek annak összes műszaki következményével.
(https://hobbicncforum.hu/uploaded_images/2019/11/tn_8d3bv09n90tqm3en83nx_4936.gif) (https://hobbicncforum.hu/uploaded_images/2019/11/8d3bv09n90tqm3en83nx_4936.gif)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 november 03, 11:07
Írta: svejk Dátum 2019 november 03, 11:07
A léptetőmotor már csak ilyen, ugrabugrál, a szíj meg rugózik.
Egyébként a grafikonon egyforma a léptéke a programozott és a mért értékeknek?
Egyébként a grafikonon egyforma a léptéke a programozott és a mért értékeknek?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 november 03, 11:17
Írta: svejk Dátum 2019 november 03, 11:17
Jut eszembe, a múltkori dologra pontot tettél már?
Tudod a különféle vezérlőprogramok mérései.
Tudod a különféle vezérlőprogramok mérései.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 november 03, 11:47
Írta: dtb Dátum 2019 november 03, 11:47
Ez egy nagyon jó grafikon, de mint információ nekem sokat mondana az időintervallum is, azt nem lehet valahogy rávarázsolni?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 03, 13:00
Írta: 000000000 Dátum 2019 november 03, 13:00
"A léptetőmotor már csak ilyen, ugrabugrál"
1. Én azért a helyedben "dobmék egy hátast", amikor a valóság ennyire szembejön veled, miközben a kedvenc vezérlőd grafikája 24 millió színárnyalat mellett szinte folyamatosan mást mutat, mint a valóság.[#csodalk][#conf]
2. A gyorsulással kapcsolatban (lila egyenesek) akkorát hazudik a vezérlő alapadata, hogy azt csak 5-szörösen nagyított léptékkel lehet ebben az ábrában érzékeltetni. Ha azonos lenne a lépték (a sebességeknél azonos), akkor csak egy vízszintes lila vonalat látnál. Ez ugyebár a nulla szint.
Van az ábrán egébként két sárga segéd vonal, ezek a +- 5 m/s2 gyorsulási szintet jelölik ki. Jól látható, hogy bizonyos időőpillanatokban ezt a szintet jóval meghaladó gyorsulás értékeket és bemér a rendszer, és ennek rendkívül súlyos műszaki, dinamikia, technológiai következményei vannak. A röhej és egyben a katasztrófa meg az, hogy ezen jelenségek közben a vezérlés azzal nyugtat, hogy nincs itt semmi látnivaló, NULLA a gyorsulás az állandósult sebesség szakaszban.[#nyes]
3. Egyelőre Robsy, Mach bemérési adataim vannak.
1. Én azért a helyedben "dobmék egy hátast", amikor a valóság ennyire szembejön veled, miközben a kedvenc vezérlőd grafikája 24 millió színárnyalat mellett szinte folyamatosan mást mutat, mint a valóság.[#csodalk][#conf]
2. A gyorsulással kapcsolatban (lila egyenesek) akkorát hazudik a vezérlő alapadata, hogy azt csak 5-szörösen nagyított léptékkel lehet ebben az ábrában érzékeltetni. Ha azonos lenne a lépték (a sebességeknél azonos), akkor csak egy vízszintes lila vonalat látnál. Ez ugyebár a nulla szint.
Van az ábrán egébként két sárga segéd vonal, ezek a +- 5 m/s2 gyorsulási szintet jelölik ki. Jól látható, hogy bizonyos időőpillanatokban ezt a szintet jóval meghaladó gyorsulás értékeket és bemér a rendszer, és ennek rendkívül súlyos műszaki, dinamikia, technológiai következményei vannak. A röhej és egyben a katasztrófa meg az, hogy ezen jelenségek közben a vezérlés azzal nyugtat, hogy nincs itt semmi látnivaló, NULLA a gyorsulás az állandósult sebesség szakaszban.[#nyes]
3. Egyelőre Robsy, Mach bemérési adataim vannak.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 november 03, 13:14
Írta: svejk Dátum 2019 november 03, 13:14
Teendő?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 03, 13:25
Írta: 000000000 Dátum 2019 november 03, 13:25
1. Ha értelmeznéd az ábrához tartozó hosszú, szöveges adat felsorolást, ~1 másodpereces fejszámolással meg tudtad volna határozni, hogy kb. mennyi idő alatt is történt ez a teszt. Én helyetted most ezt biztos nem végzem el.
Mellesleg ennek az ábrának első körben az időnek csak annyi szerepe van, hogy egy állandósult mozgási sebesség szakasz is ki tudjon alakulni. Ez pedig szemmmel látható, hogy teljesül.
2. Ez az ábra egy nagyobb mérési kép kiragadott része csak, hiszen a pozíció (út) megjelenítés sincs rajta. A teljes ábrán minden fontos lépték, adat természetesen megtalálható, majd talán ilyeneket is láthatsz (meg már láthattál is) itt tőlem.
3. Épp elég infó, elgondolkozni való van ezen az ábrán (ezért is készítettem), egyelőre ezekkel küzdjél meg, és szűrd le belőle a számodra legfontosabb tanulságokat. Ha meg nem érdekel a valósággal való szebesülés, tanácsolom, hogy ugorjál, amikor a Robsy nick nevet meglátod ezen a fórumon. Informatikus nyelven:
if visual nick name$ = "Robsy" then goto to end of topic[#nyes]
Mellesleg ennek az ábrának első körben az időnek csak annyi szerepe van, hogy egy állandósult mozgási sebesség szakasz is ki tudjon alakulni. Ez pedig szemmmel látható, hogy teljesül.
2. Ez az ábra egy nagyobb mérési kép kiragadott része csak, hiszen a pozíció (út) megjelenítés sincs rajta. A teljes ábrán minden fontos lépték, adat természetesen megtalálható, majd talán ilyeneket is láthatsz (meg már láthattál is) itt tőlem.
3. Épp elég infó, elgondolkozni való van ezen az ábrán (ezért is készítettem), egyelőre ezekkel küzdjél meg, és szűrd le belőle a számodra legfontosabb tanulságokat. Ha meg nem érdekel a valósággal való szebesülés, tanácsolom, hogy ugorjál, amikor a Robsy nick nevet meglátod ezen a fórumon. Informatikus nyelven:
if visual nick name$ = "Robsy" then goto to end of topic[#nyes]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 03, 13:27
Írta: 000000000 Dátum 2019 november 03, 13:27
Tudod te azt. Gondolkozz, és a következtetéseket rád bízom.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2019 november 03, 13:43
Írta: PSoft Dátum 2019 november 03, 13:43
IdézVan az ábrán egébként két sárga segéd vonal,...
Én azt hittem, a két sárga vonalat csak az ábrád színesítésére rajzoltad oda.[#smile]
Mondom is magamban...
Ha lassan is, de azért a kőkemény valóságban is alakul a " 24 millió színárnyalat".[#wave]
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 november 03, 14:07
Írta: svejk Dátum 2019 november 03, 14:07
Gondolom használjunk DOS-os Robsy féle vezérlőprogramot.
Azzal egyébként mit mutat a grafikon?
Azzal egyébként mit mutat a grafikon?
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2019 november 03, 14:09
Írta: Vetesi75 Dátum 2019 november 03, 14:09
Üdv! A motor léptetési üzeméről (mikrolépés) lehet valami információt kapnunk? Köszönöm!
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 november 03, 15:15
Írta: dtb Dátum 2019 november 03, 15:15
Helytelen válasz :-)
Egyébként meg már a '90-es években is garantált pótvizsgát jelentett a GOTO használata a fősulin :-)
Én azt gondolom, hogy bármiféle mozgást ábrázolni az idő megadása nélkül, kb arra jó, mint a távfutó maraton futás közben fellépő viszkető bal heréjéről írt doktori disszertáció. Pedig ott legalább konkrétan tudjuk, hogy a bal heréje viszketett, de itt még az sem derült ki, hogy milyen vezérlőről van szó, és milyen beállításokal...
Egyébként meg már a '90-es években is garantált pótvizsgát jelentett a GOTO használata a fősulin :-)
Én azt gondolom, hogy bármiféle mozgást ábrázolni az idő megadása nélkül, kb arra jó, mint a távfutó maraton futás közben fellépő viszkető bal heréjéről írt doktori disszertáció. Pedig ott legalább konkrétan tudjuk, hogy a bal heréje viszketett, de itt még az sem derült ki, hogy milyen vezérlőről van szó, és milyen beállításokal...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 03, 15:22
Írta: 000000000 Dátum 2019 november 03, 15:22
Köszönöm a témába vágó műszaki kérdésedet.
1.8 fok-os kétfázisú motorra (konkrét típus: 23SH51-042, párhuzamos tekercs bekötéssel) vonatkozik a mérés 1600 step/fordulat microstep beállítású saját építésű TB6560 vezérlővel hajtva.
Egyébként egy rendkívül izgalmas lehetőséget teremt ez a Robsy mérőrendszer, rengeteg időt, energiát öltem már bele az elmúlt évek alatt. Ugyanis úgy kell felfogni a koncepciót, hogy az egész vizsgálandó CNC gépet mindenestül (A vezérlés + B hajtáslánc + C mechanika) tekintstük egy fekete doboznak, és ennek a legvégére (a szán szerkezet vagy a forgó asztalra) elhelyezzük a méréshez szükséges szenzort. A gépen csak egy 2 soros G kód fut majd le, pl. 10 mm-oda vissza mozgással különböző előtolási sebességekkel tesztenként, közben meg dolgozik a Robsy mérőrendszer, és begyűjti az adatokat. Ezt követően ott a helyszínen azonnal egy teljes kép jelenik meg arról, hogy mi történt a pozíció, sebesség, gyorsulás tekintetében.
Nyilván óriási különbségek lesznek attól föggően, hogy a "fekete doboz" milyen elemekből áll ( pl. milyen CNC vezérlővel, motorokkal /léptető, AC/DC szervo, ..../, milyen precíz mechanikával állunk szemben), és ez az egész CNC milyen érték kategóriát képvisel.
Egy biztos: A mérési eredmények a műszaki valósággal fognak szembesíteni minket, és ha kellő alázattal, tudással, tisztelettel fordultunk gépünk megépítése, tervezése során ezen törvények felé, a lehető legjobb, az ideálishoz egyre jobban közelítő eredményt fogunk kapni cserébe.
Ismerve persze néhány Fórum tag előítéletes mentalitást persze sokan azt mondják, "mit ugat már megint itt ez az ostoba mérnök", hát "működik" az én gépem, más meg nem számít. Nos nekik azt üzenem, alkalmazzák az előző beírásom feltételes ugrását. Ha viszont csak egy szakembert, hobbystát érdekel ez a téma, és a "működés" szavacska valós árnyalatai, minőségi jellemzői, akkor már sokat tanulhatunk az itt felvetett műszaki kérdések kapcsán egymástól. Így aztán köszönöm Neked a pontosító kérdésedet, ezek és még sok más apróság is ok-okozati összefüggésben van a végeredménnyel, hiszen minden méréshez tartozik egy feltétel/körülmény rendszer is sok-sok változóval.
1.8 fok-os kétfázisú motorra (konkrét típus: 23SH51-042, párhuzamos tekercs bekötéssel) vonatkozik a mérés 1600 step/fordulat microstep beállítású saját építésű TB6560 vezérlővel hajtva.
Egyébként egy rendkívül izgalmas lehetőséget teremt ez a Robsy mérőrendszer, rengeteg időt, energiát öltem már bele az elmúlt évek alatt. Ugyanis úgy kell felfogni a koncepciót, hogy az egész vizsgálandó CNC gépet mindenestül (A vezérlés + B hajtáslánc + C mechanika) tekintstük egy fekete doboznak, és ennek a legvégére (a szán szerkezet vagy a forgó asztalra) elhelyezzük a méréshez szükséges szenzort. A gépen csak egy 2 soros G kód fut majd le, pl. 10 mm-oda vissza mozgással különböző előtolási sebességekkel tesztenként, közben meg dolgozik a Robsy mérőrendszer, és begyűjti az adatokat. Ezt követően ott a helyszínen azonnal egy teljes kép jelenik meg arról, hogy mi történt a pozíció, sebesség, gyorsulás tekintetében.
Nyilván óriási különbségek lesznek attól föggően, hogy a "fekete doboz" milyen elemekből áll ( pl. milyen CNC vezérlővel, motorokkal /léptető, AC/DC szervo, ..../, milyen precíz mechanikával állunk szemben), és ez az egész CNC milyen érték kategóriát képvisel.
Egy biztos: A mérési eredmények a műszaki valósággal fognak szembesíteni minket, és ha kellő alázattal, tudással, tisztelettel fordultunk gépünk megépítése, tervezése során ezen törvények felé, a lehető legjobb, az ideálishoz egyre jobban közelítő eredményt fogunk kapni cserébe.
Ismerve persze néhány Fórum tag előítéletes mentalitást persze sokan azt mondják, "mit ugat már megint itt ez az ostoba mérnök", hát "működik" az én gépem, más meg nem számít. Nos nekik azt üzenem, alkalmazzák az előző beírásom feltételes ugrását. Ha viszont csak egy szakembert, hobbystát érdekel ez a téma, és a "működés" szavacska valós árnyalatai, minőségi jellemzői, akkor már sokat tanulhatunk az itt felvetett műszaki kérdések kapcsán egymástól. Így aztán köszönöm Neked a pontosító kérdésedet, ezek és még sok más apróság is ok-okozati összefüggésben van a végeredménnyel, hiszen minden méréshez tartozik egy feltétel/körülmény rendszer is sok-sok változóval.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 03, 15:28
Írta: 000000000 Dátum 2019 november 03, 15:28
[#nyes][#nevetes1]
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2019 november 03, 15:40
Írta: PSoft Dátum 2019 november 03, 15:40
Biztos sokunkban megfogalmazódott sok "műszaki" kérdés, a képeddel, grafikonoddal, közölt paramétereiddel kapcsolatban.
Többek között bennem is, pld. ugyanaz, amit Gábor megkérdezett.
Többé-kevésbé ismerve engem...
Vajon, ha én kérdezem ugyanezt, nekem...mit válaszoltál volna?[#nemtudom]
Többek között bennem is, pld. ugyanaz, amit Gábor megkérdezett.
Többé-kevésbé ismerve engem...
Vajon, ha én kérdezem ugyanezt, nekem...mit válaszoltál volna?[#nemtudom]
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2019 november 03, 15:43
Írta: zozo Dátum 2019 november 03, 15:43
-és milyen mértékben felelős a TB6560 ezekért a csúnya kilengésekért? Van/volt lehetőséged másik vezérlővel is ugyanezt a mérést elvégezni?
Sztem már túl sok energiát ne fektess a visszacsatolatlan léptető motor mérésekbe, megtanultuk Tőled, hogy lassan hobbi kategóriából is kiszorítandók lesznek.
Azért érdekes lenne még egy encoderes léptető viselkedése is a mérőpadodon.
Aztán léphetünk minden téren a szervók felé, már egyre gyakrabban elérhető itt a fórumon is a kis teljesítményű hobbira alkalmas szervó kombó.
Sztem már túl sok energiát ne fektess a visszacsatolatlan léptető motor mérésekbe, megtanultuk Tőled, hogy lassan hobbi kategóriából is kiszorítandók lesznek.
Azért érdekes lenne még egy encoderes léptető viselkedése is a mérőpadodon.
Aztán léphetünk minden téren a szervók felé, már egyre gyakrabban elérhető itt a fórumon is a kis teljesítményű hobbira alkalmas szervó kombó.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 03, 16:08
Írta: 000000000 Dátum 2019 november 03, 16:08
Ha nem vetted volna észre kerülöm már az olyan válaszadásokat, és így nem is írok semmit azokra a beszólásokra, amik NULLA közeli érdemi műszaki tartalommal bírnak a beírásom témájával kapcsolatban, viszont egébként erősen előítéletesek, szubjetívek, kötekedők és lényegtelenek.
Neked is most csak azért válaszoltam, hogy megértsed vagy észrevegyed ezt a fajta hozzáállásomat (tudod új, hatásos PID védelmi/békeszerető szabályzókör algortitmus fut már az agyamban az ilyen esetekre), és ne csak két nevetős ikont kapjál maximum most te is, mint az előbb dtb. Természetesen szakmai alapon a továbbiakban is állok a rendelkezésedre, mint írtam.[#wave]
Neked is most csak azért válaszoltam, hogy megértsed vagy észrevegyed ezt a fajta hozzáállásomat (tudod új, hatásos PID védelmi/békeszerető szabályzókör algortitmus fut már az agyamban az ilyen esetekre), és ne csak két nevetős ikont kapjál maximum most te is, mint az előbb dtb. Természetesen szakmai alapon a továbbiakban is állok a rendelkezésedre, mint írtam.[#wave]
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 03, 16:38
Írta: 000000000 Dátum 2019 november 03, 16:38
A léptető motor vezérlők közül az alábbi, hobbysták által is nagy számban használt fő típusokat teszteltem már ilyen mérések kapcsán: DRV8825, A4988, Toshiba szériák, TMC szériák, MSD50-4.2, DM542, stb....
Aztán néhány próbára kapott visszacsatolt encoderes stepper meghajtót is teszteltem, a 2017-es székesfehérvári talin élőben is.
Profi DC szervo motoros tesztjeim is vannak, ezek egyfajta referenciát jelentenek per pillanat a sorban.
Veled ellentétben én nem becsülném le ömagában a hagyományos léptető motort se, picit érteni kell a lelkivilágát, és a hajtásméretezés alapelveit, és akkor sokat tudnak javulni is a képességeiken belül persze. A rosszul megtervezett visszacsatolt stepperes hajtás néha rosszabb eredményt ad, mint egy jó mezei hagyományos.
A későbbiekben majd még valószínűleg itt is publikálok pár érdekes, és meglepő mérési eredményt, a weboldalamon van épp elég már.
Aztán néhány próbára kapott visszacsatolt encoderes stepper meghajtót is teszteltem, a 2017-es székesfehérvári talin élőben is.
Profi DC szervo motoros tesztjeim is vannak, ezek egyfajta referenciát jelentenek per pillanat a sorban.
Veled ellentétben én nem becsülném le ömagában a hagyományos léptető motort se, picit érteni kell a lelkivilágát, és a hajtásméretezés alapelveit, és akkor sokat tudnak javulni is a képességeiken belül persze. A rosszul megtervezett visszacsatolt stepperes hajtás néha rosszabb eredményt ad, mint egy jó mezei hagyományos.
A későbbiekben majd még valószínűleg itt is publikálok pár érdekes, és meglepő mérési eredményt, a weboldalamon van épp elég már.
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2019 november 03, 16:52
Írta: Vetesi75 Dátum 2019 november 03, 16:52
A hajtás felbontásigényét saccolva feltételeztem, hogy mikrolépéses üzemben ment, de ennek ellenére az egész lépések frekvenciájával ismétlődően ingadozik a gyorsulás.
Első körben megnézném azt a motort, hogy két egész lépéshez képest szimmetrikus-e a féllépés pozíciója. Statikus állapotban, vezérlő nélkül csak simán egy labortápról. Ezzel kb. kiszűrhető a selejt motor. Aztán ugyanezt megismételném a meghajtóval is, akár minden mikrolépés pozíciónál. Ha itt is minden rendben, akkor a fázisáramok aránya korrekt csak az egyes pozíciókhoz tartozó összegük nagyságával lehet baj.
Első körben megnézném azt a motort, hogy két egész lépéshez képest szimmetrikus-e a féllépés pozíciója. Statikus állapotban, vezérlő nélkül csak simán egy labortápról. Ezzel kb. kiszűrhető a selejt motor. Aztán ugyanezt megismételném a meghajtóval is, akár minden mikrolépés pozíciónál. Ha itt is minden rendben, akkor a fázisáramok aránya korrekt csak az egyes pozíciókhoz tartozó összegük nagyságával lehet baj.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 03, 17:22
Írta: 000000000 Dátum 2019 november 03, 17:22
Sok kis apró tényezőt említettél, pl. a léptető motoros hajtás statikus pozíci beállási képességét micro step esetén. A TB6560 IC sok más tőle 5-ször drágább digitális meghajtót ilyen szempontból megelőz a méréseim kapcsán, tehát nem ez a fő hullámossági ok.
Arról nem írtál semmit, ami szintea legfontosabb, egy olyan vasba öntött tényező, amit a motor mechanikai időállandójának nevez a szakirodalom. Több mint 10 éve, még Varsányi Péter Fórum főnöksége alatt a szervo topikban az egységugrás és az időállandó témát eléggé kiveséztük hatalmas viták kapcsán (talán akkor te még nem voltál aktív fórumos), azóta is pár ember (főleg akiknek sejtelme is alig van a témához szakmailag) ezeket a kifejezéseket itt szitokszónak, és hobbyban értelmetlennek tartja, de ez legyen az ő problémájuk.:)
Pedig minden itt kezdőddik, egy motor önmagában is egy lengő, két tárolós visszacsatolt rendszerként modellezhető, itt kell elsősorban keresgélni a jelenségek kiinduló okát, magyarázatát, mértékét.
Arról nem írtál semmit, ami szintea legfontosabb, egy olyan vasba öntött tényező, amit a motor mechanikai időállandójának nevez a szakirodalom. Több mint 10 éve, még Varsányi Péter Fórum főnöksége alatt a szervo topikban az egységugrás és az időállandó témát eléggé kiveséztük hatalmas viták kapcsán (talán akkor te még nem voltál aktív fórumos), azóta is pár ember (főleg akiknek sejtelme is alig van a témához szakmailag) ezeket a kifejezéseket itt szitokszónak, és hobbyban értelmetlennek tartja, de ez legyen az ő problémájuk.:)
Pedig minden itt kezdőddik, egy motor önmagában is egy lengő, két tárolós visszacsatolt rendszerként modellezhető, itt kell elsősorban keresgélni a jelenségek kiinduló okát, magyarázatát, mértékét.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2019 november 03, 17:33
Írta: PSoft Dátum 2019 november 03, 17:33
Korábban, igen csak lehúztad a TOSHIBA TB6560 IC köré épült kínai,és más egyéb gyártású motormeghajtókat.
Ezek szerint "sikerült" -lehet, nem is jó a kifejezés- kiküszöbölnöd saját tervezésben/építésben a korábban szinte majd mindegyiknél felmerülő hibákat/problémákat.
Más...csak kíváncsiság.
A [#t263#] motorvezérlőjét sikerült-e már tesztelned a saját mérőrendszereddel?
Ezek szerint "sikerült" -lehet, nem is jó a kifejezés- kiküszöbölnöd saját tervezésben/építésben a korábban szinte majd mindegyiknél felmerülő hibákat/problémákat.
Más...csak kíváncsiság.
A [#t263#] motorvezérlőjét sikerült-e már tesztelned a saját mérőrendszereddel?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 03, 18:14
Írta: 000000000 Dátum 2019 november 03, 18:14
Így van, az akkori piros és kék 3-4 axis kínai TB6560 vezérlők hibáira próbáltam rájönni én is, és egy saját nyákterv + pár jó helyen elhelyezett hidegítő kondi, és a HOME position IC láb felhasználása, áram lecsengés változatok beállítása az IC bemeneti lábainál "csodákat" művelt ezzel az IC-vel, és alap feladatokra bőven elég. Azt se felejtsük el, hogy azóta már van a TB6600-as nagyobb testvér is, ezt is szeretem a saját kis nyákjaimon, és a szokásos 3D nyomtató mini stick stepper meghjtókhoz is van egy saját kis optocsatolós leválasztású panelem.
Eddig még a SmartStepper-es hajtást nem mértem be, mivel én nem vettem belőle, fórumos érdeklődő meg ezzel kapcsolatosan még nem jelentkezett. De ahogy olvastam a topik fejleményeit sokan még fel se élesztették a komplett hajtást, csak "bespájzoltak" belőle.:)
Eddig még a SmartStepper-es hajtást nem mértem be, mivel én nem vettem belőle, fórumos érdeklődő meg ezzel kapcsolatosan még nem jelentkezett. De ahogy olvastam a topik fejleményeit sokan még fel se élesztették a komplett hajtást, csak "bespájzoltak" belőle.:)
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2019 november 03, 19:10
Írta: PSoft Dátum 2019 november 03, 19:10
Tudom, kitartó vagy...
(ebben talán...)[#kacsint]
Ezek szerint ennyit számít, ha valaki nem az olcsó "tömegcikk" előállításra,és a profitra törekszik.
A "bélyeg" meghajtóknál, -A49xx DRVxx- az optocsatolós panel milyen jelentőséggel bír? Miben nyilvánul meg a beépítés jelentősége?
Vannak gyakorlati, vagy -a hobbista szemével is- látható pozitív jelei, pld. egy 3D nyomtatónál?
Vagy...
Te tudod, hogy sokkal jobb úgy a motornak/vezérlőnek,és...punktum! [#smile]
A SmartStepper...
Biztos így lehet ahogy írod, az enyémek is a "spájzban" várakoznak.:)
Ha gondolod, szívesen a rendelkezésedre bocsájtok egy példányt egy "Robsy-féle tesztelésre/mérésre".[#wave]
(ebben talán...)[#kacsint]
Ezek szerint ennyit számít, ha valaki nem az olcsó "tömegcikk" előállításra,és a profitra törekszik.
A "bélyeg" meghajtóknál, -A49xx DRVxx- az optocsatolós panel milyen jelentőséggel bír? Miben nyilvánul meg a beépítés jelentősége?
Vannak gyakorlati, vagy -a hobbista szemével is- látható pozitív jelei, pld. egy 3D nyomtatónál?
Vagy...
Te tudod, hogy sokkal jobb úgy a motornak/vezérlőnek,és...punktum! [#smile]
A SmartStepper...
Biztos így lehet ahogy írod, az enyémek is a "spájzban" várakoznak.:)
Ha gondolod, szívesen a rendelkezésedre bocsájtok egy példányt egy "Robsy-féle tesztelésre/mérésre".[#wave]
Cím: Re:Léptetőmotor
Írta: Bencze András Dátum 2019 november 03, 19:47
Írta: Bencze András Dátum 2019 november 03, 19:47
Lehet elsiklottam felette.. akkor bocsi. A valós sebességet és gyorsulást hol és mivel mérted?
Cím: Re:Léptetőmotor
Írta: Bencze András Dátum 2019 november 03, 19:49
Írta: Bencze András Dátum 2019 november 03, 19:49
A kérdés csak a mivel...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 03, 19:59
Írta: 000000000 Dátum 2019 november 03, 19:59
Tapasztalatom szerint ha nincs galvanikusan leválasztva egy step/dir motor hajtás a mezei PC-s vezérlőről, az sok bosszantó, véletlenszerű hibajelnségnek is lehet a forrása. Védi is a vezérlő eszközt, mert azt ritkán élik túl a step/dir jel küldő eszközök, portok, ha a több tíz, netán több száz voltos motortáp is oda keveredik valami fatális meghajtó hiba miatt.
Ezen okok miatt optós leválasztás nélkül én semmilyen hajtást nem használok.
Köszönöma smartstepper-es teszt felajánlásodat, ha nem lesz közelebbről itt helyben, összehozzuk majd a tieddel.
Ezen okok miatt optós leválasztás nélkül én semmilyen hajtást nem használok.
Köszönöma smartstepper-es teszt felajánlásodat, ha nem lesz közelebbről itt helyben, összehozzuk majd a tieddel.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 03, 20:24
Írta: 000000000 Dátum 2019 november 03, 20:24
Ha egy lineáris vagy körpályán mozgó test egyik valós mozgás jellemző függvényét (út, sebesség, gyorsulás) bemértük egy arra alkalmas szenzorral, és azt így már ismerjük, abból bármelyik másik kettő kiszámolható, hiszen köztük egyértelmű, szoros differenciálási/integrálási matematikai összefüggések vannak. Hogy mik ezek, azt pedig ~340 éve már ismerhetjük Newton-nak köszönhetően, a földkerekség egyik legnagyobb zseni fizikusának/matematikusának köszönhetően.
Hál Istennek ezek a műszaki törvények nem változnak havonta, évente, mint a legújabb és éppen aktuális op. rendszer vagy PC alaplap, így elég egyszer az életünkben megtanulni, megérteni.
Hál Istennek ezek a műszaki törvények nem változnak havonta, évente, mint a legújabb és éppen aktuális op. rendszer vagy PC alaplap, így elég egyszer az életünkben megtanulni, megérteni.
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2019 november 03, 20:43
Írta: Vetesi75 Dátum 2019 november 03, 20:43
Statikus dolgokat méregetünk, tehát időállandó, inercia, stb. még szóba sem kerülhet. Először mechanikai szempontból tegyük korrekté a cuccost, utána vizsgálódjunk elektromosan. A jelleggörbe állandósult szakasza, ami nálam kiverte a biztosítékot, mert ennek a "nyomaték ingadozásnak" egy korrekt motornál, korrekten kezelt mikrolépéses üzemmódnál nem szabadna, hogy fellépjen.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 03, 20:49
Írta: 000000000 Dátum 2019 november 03, 20:49
"Statikus dolgokat méregetünk, tehát időállandó, inercia, stb. még szóba sem kerülhet."
Őőő, izé, .....[#csodalk][#conf]
Ugye viccelsz? Vagy ha nem, valamit teljesen félreértettél eddig ebből a motor dinamikai mérésből.
Őőő, izé, .....[#csodalk][#conf]
Ugye viccelsz? Vagy ha nem, valamit teljesen félreértettél eddig ebből a motor dinamikai mérésből.
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2019 november 03, 21:01
Írta: Vetesi75 Dátum 2019 november 03, 21:01
Nem viccelek!
A motor mechanikusan (mágnesesen) korrekt?
A vezérlő mikrolépés-pozíció szempontjából korrekt?
A vezérlő az egyes mikrolépés-pozícióhoz tartozó tartónyomaték szempontjából korrekt?
A motor mechanikusan (mágnesesen) korrekt?
A vezérlő mikrolépés-pozíció szempontjából korrekt?
A vezérlő az egyes mikrolépés-pozícióhoz tartozó tartónyomaték szempontjából korrekt?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 03, 21:12
Írta: 000000000 Dátum 2019 november 03, 21:12
Bocs, de ha nem viccelsz, akkor javasolnám, hogy aludjál ezekre a kérdésekre egy jót, holnapra "leesik a tantusz", és magad is rájössz sok mindenre, amiket most még nem látsz kristály tisztán, és így most még műszaki tévutakon jársz.
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2019 november 03, 21:32
Írta: Vetesi75 Dátum 2019 november 03, 21:32
Bocs, de én úgy vélem, hogy ami állandósult (statikus) állapotában is rossz, az a mozgatás (dinamikus terhelés) hatására is csak még rosszabbá válhat.
Gondolom készítettél 120mm/min sebességnél is mérést, azt szeretnéd publikálni?
Gondolom készítettél 120mm/min sebességnél is mérést, azt szeretnéd publikálni?
Cím: Re:Léptetőmotor
Írta: zozo Dátum 2019 november 03, 21:37
Írta: zozo Dátum 2019 november 03, 21:37
Tibor, találj ki nekünk olyan vezérlőt, ami képes 1/16-od (áh jó lesz 1/8-ad) lépésenként megállítani a 200 step-es motort és pozícióban is tartani. Akkor a mérésed görbéi is sokkal szebben alakulnának és mi is örülnénk. [#kacsint]
Tényleg, -léteznek 800, vagy 1600-as lépésű motorok?
-vagy drága lenne az előállítás?
Tényleg, -léteznek 800, vagy 1600-as lépésű motorok?
-vagy drága lenne az előállítás?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 03, 21:51
Írta: 000000000 Dátum 2019 november 03, 21:51
#6213-as bejegyzés, innen indultunk ma, amiben ezt írtam többek között:
"A mérés során a vezérlő program egy 10 mm-es elmozdulást 20 mm/s (1200 mm/min) előtolással 0.3 m/s2 gyorsulással hajt végre egy 1 Nm-es léptető motorral."
Mi ebben a mozgási eseményben a statikus?
Ha valami mozog, és ennek méricskéljük a fő mozgás jellemzőit az idő függvényében, az eleve hogy lehet statikus?
Nem akarsz mégis inkább aludni egyet az utóbbi beírásaidra?:)
Na mindegy, én lassan megyek lefeküdni, holnap is lesz nap.
"A mérés során a vezérlő program egy 10 mm-es elmozdulást 20 mm/s (1200 mm/min) előtolással 0.3 m/s2 gyorsulással hajt végre egy 1 Nm-es léptető motorral."
Mi ebben a mozgási eseményben a statikus?
Ha valami mozog, és ennek méricskéljük a fő mozgás jellemzőit az idő függvényében, az eleve hogy lehet statikus?
Nem akarsz mégis inkább aludni egyet az utóbbi beírásaidra?:)
Na mindegy, én lassan megyek lefeküdni, holnap is lesz nap.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 04, 06:43
Írta: 000000000 Dátum 2019 november 04, 06:43
1. Minek feltalálni, megtették ezt már 50-60 évvel ezelőtt, és ma is tudja alapvetően a kívánalmaidat minden hajtás.
2. Léteznek más alapfelbontású motorok mint a leggyakrabban használt 200 lépésű. Hiszen van ebben a 2 fázisú kategóriában is 400 lépéses kivitel, de pl. az ötfázisú kategóriában alap az 500 vagy 1000. Így jó napod volt, minden vágyad máris teljesült.
3. "Akkor a mérésed görbéi is sokkal szebben alakulnának"
Sajnos nem sokkal szebben, vagy adott esetben még durvább impulzus tüskék is keletkezhetnek. Ennek belátására elég, ha végig gondolod a léptetőmotor működési elvét, mi is történik két step jel között. A világ ugyanis analóg. Ezért két diszkrét idő pillanat alatt (két step jel között) is a valóságban végtelen sok más időpillanat van, miközben a motor forog. A digitális világnak pont ez az egyik fő hátránya, hogy ezekről közben fogalma sincs, bármit is látsz a számítógéped monitorján. Persze ha valaki vakon elhisz mindent (tisztelet a kivételnek), amit sugallnak neki, annak szép és boldog az élete a saját kis alternatív valóságában. Ezért nagyon fontos megmérni is a dolgokat, hiszen a valóságot, tényeket csak így ismerhetjük a mérési pontosság keretein belül.
2. Léteznek más alapfelbontású motorok mint a leggyakrabban használt 200 lépésű. Hiszen van ebben a 2 fázisú kategóriában is 400 lépéses kivitel, de pl. az ötfázisú kategóriában alap az 500 vagy 1000. Így jó napod volt, minden vágyad máris teljesült.
3. "Akkor a mérésed görbéi is sokkal szebben alakulnának"
Sajnos nem sokkal szebben, vagy adott esetben még durvább impulzus tüskék is keletkezhetnek. Ennek belátására elég, ha végig gondolod a léptetőmotor működési elvét, mi is történik két step jel között. A világ ugyanis analóg. Ezért két diszkrét idő pillanat alatt (két step jel között) is a valóságban végtelen sok más időpillanat van, miközben a motor forog. A digitális világnak pont ez az egyik fő hátránya, hogy ezekről közben fogalma sincs, bármit is látsz a számítógéped monitorján. Persze ha valaki vakon elhisz mindent (tisztelet a kivételnek), amit sugallnak neki, annak szép és boldog az élete a saját kis alternatív valóságában. Ezért nagyon fontos megmérni is a dolgokat, hiszen a valóságot, tényeket csak így ismerhetjük a mérési pontosság keretein belül.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2019 november 04, 14:47
Írta: PSoft Dátum 2019 november 04, 14:47
Ha már szóba kerültek a nagyobb felbontású, kisebb lépésszögű motorok, szerinted...
Várhatok minőségi javulást, -a nyomatra értve- ha a mostani 200 lépéses motorjaimat 0,9 fokos, 400 lépéses motorokra cserélem?
Most, A4988-ak hajtanak, 16 mikrosteppre jumperolva.
Várhatok minőségi javulást, -a nyomatra értve- ha a mostani 200 lépéses motorjaimat 0,9 fokos, 400 lépéses motorokra cserélem?
Most, A4988-ak hajtanak, 16 mikrosteppre jumperolva.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 04, 15:19
Írta: 000000000 Dátum 2019 november 04, 15:19
Van esély a javulásra, de pl. sok függ attól, hogy a 400-as motor tekercs induktivitása, ohm-os ellenállása mennyivel másabb, mint a 200-as motorodé.
Igazából ez úgy derülne ki, ha mindkettőt kimérnénk azonos fordulatszám tartományra, ilyen összahasonlító mérési adatom még nincs, de tervezem majd.
A 400-as motornál az is gond lehet még, hogy nagyobb sebességeknél hamarabb elvész a nyomatéka, és dupla akkora step jel freki is kell neki. Pl. megtartva az 1/16-os microstep-et 2 1/s motorfordulatnál ez már 12.8 kHz, és vannak hiványabb arduinós klónok, amik itt már akadoznak.
Szoktam nézni a 3D műveidet, szerintem elég szépek azok már abban a kategóriában, és kihozod belőle a maximumot. [#eljen] Az is igaz viszont, mindig lehet "reszelni", javítani egy kicsit a dolgokon.
Igazából ez úgy derülne ki, ha mindkettőt kimérnénk azonos fordulatszám tartományra, ilyen összahasonlító mérési adatom még nincs, de tervezem majd.
A 400-as motornál az is gond lehet még, hogy nagyobb sebességeknél hamarabb elvész a nyomatéka, és dupla akkora step jel freki is kell neki. Pl. megtartva az 1/16-os microstep-et 2 1/s motorfordulatnál ez már 12.8 kHz, és vannak hiványabb arduinós klónok, amik itt már akadoznak.
Szoktam nézni a 3D műveidet, szerintem elég szépek azok már abban a kategóriában, és kihozod belőle a maximumot. [#eljen] Az is igaz viszont, mindig lehet "reszelni", javítani egy kicsit a dolgokon.
Cím: Re:Léptetőmotor
Írta: Bencze András Dátum 2019 november 04, 18:21
Írta: Bencze András Dátum 2019 november 04, 18:21
Bocs még 1x mivel mérted? Avagy mi az "egy arra alkalmas szenzor"
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2019 november 04, 18:34
Írta: PSoft Dátum 2019 november 04, 18:34
A 400-as motor(ok) kérdezett paramétereiről nem tudok most nyilatkozni, mérnem kell őket.
No meg, a 200-ast is.:)
Nem akarok én nagyobb sebességet a "nyomigán", mint amit a mostani 200-as motorokkal el tudok érni.
Ahhoz, már kevés lenne az akril váz mechanikai szilárdsága, merevsége is.[#kacsint]
Elsősorban, látható felületminőségi javulást várnék a nyomatokon, pusztán csak a motorcserétől.
Tudom, van(vannak) jobb meghajtók is az A4988-nál, de épp ez van beépítve, ebből akarom mint ahogy írod is..."kihozni a maximumot".
Köszönöm, Tőled...jóleső szavak![#worship]
A mutatott fotók sokszor csalókák ám, vagy lehet csak...én vagyok csaló.[#kacsint]
Amúgy szépek, szépek, de...
Te magad is azt írod, hogy...
No meg, a 200-ast is.:)
Nem akarok én nagyobb sebességet a "nyomigán", mint amit a mostani 200-as motorokkal el tudok érni.
Ahhoz, már kevés lenne az akril váz mechanikai szilárdsága, merevsége is.[#kacsint]
Elsősorban, látható felületminőségi javulást várnék a nyomatokon, pusztán csak a motorcserétől.
Tudom, van(vannak) jobb meghajtók is az A4988-nál, de épp ez van beépítve, ebből akarom mint ahogy írod is..."kihozni a maximumot".
Köszönöm, Tőled...jóleső szavak![#worship]
A mutatott fotók sokszor csalókák ám, vagy lehet csak...én vagyok csaló.[#kacsint]
Amúgy szépek, szépek, de...
Te magad is azt írod, hogy...
Idéz...mindig lehet "reszelni", javítani egy kicsit a dolgokon.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 04, 18:44
Írta: 000000000 Dátum 2019 november 04, 18:44
Inkrementális encoder.
Cím: Re:Léptetőmotor
Írta: Bencze András Dátum 2019 november 04, 18:51
Írta: Bencze András Dátum 2019 november 04, 18:51
Köszi, ha még a felbontását és a csatlakoztatás módját elárulnád...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 04, 19:16
Írta: 000000000 Dátum 2019 november 04, 19:16
Egyedi fejlesztésű Robsy encoderjel feldolgozó interfészhez csatlakozik az encoder, amit egy ugyancsak egyedi fejlesztésű DOS-os mérő program kezel. A felbontás a mérendő mozgási sebesség, úttartomány függvénye, a 0.5 mikronos lineáris felbontás a "legvadabb" mérési feladatra is elég.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 05, 08:45
Írta: 000000000 Dátum 2019 november 05, 08:45
Egy ilyen motor dinamikai mérés (#6213) kapcsán érdemes objektív mérőszámokkal minősíteni az adott hajtást, pl. egy ilyen fontos eredmény a sebesség változási (ingadozási) arányszám. Ezt az ábrán látható fehér és zöld távolságok hányadosaként definiálhatjuk. Jelen mérés esetében ez 53.4 % (6,2/11.6) volt, ami igen siralmas eredmény, hiszen az előtolási sebesség szinte soha nem annyi, amit beprogramoztunk, és láthatunk a hobby CNC vezérlő kijelzőjén, hanem a valóságban ettől egy +- 53.4 %-os sávban eltér, és állandóan ingadozik.[#felkialtas][#ejnye1][#rinya]
Két különböző motorhajtást összehasonlítva nyilván az a jobb, ahol ez az arányszám kisebb, ideális esetben pedig ennek NULLÁNAK kellene lenni. Természetesen ezt a legjobb, legdrágább hajtás sem tudja, de az is nyilvánvaló, még a hobbyban is érdemes olyan CNC mellékhajtásokat alkalmazni, amiknél ez minél kisebb. Hiszen ennek az igadozásnak a nyoma, következménye letagadhatalanul ott lesz minden elkészült munkadarabunkon.
(https://hobbicncforum.hu/uploaded_images/2019/11/tn_4wzud0ffg2ghkyq5mx6gf_4936.jpg) (https://hobbicncforum.hu/uploaded_images/2019/11/4wzud0ffg2ghkyq5mx6gf_4936.jpg)
Két különböző motorhajtást összehasonlítva nyilván az a jobb, ahol ez az arányszám kisebb, ideális esetben pedig ennek NULLÁNAK kellene lenni. Természetesen ezt a legjobb, legdrágább hajtás sem tudja, de az is nyilvánvaló, még a hobbyban is érdemes olyan CNC mellékhajtásokat alkalmazni, amiknél ez minél kisebb. Hiszen ennek az igadozásnak a nyoma, következménye letagadhatalanul ott lesz minden elkészült munkadarabunkon.
(https://hobbicncforum.hu/uploaded_images/2019/11/tn_4wzud0ffg2ghkyq5mx6gf_4936.jpg) (https://hobbicncforum.hu/uploaded_images/2019/11/4wzud0ffg2ghkyq5mx6gf_4936.jpg)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 05, 09:21
Írta: 000000000 Dátum 2019 november 05, 09:21
Még egy gondolat, megjegyzés az előbbiekhez:
Ha ez az arányszám nagyobb mint 100% (volt már ilyen mérésem), akkor az a durva helyzet van, hogy adott pillanatokban a mozgás irányt is változtat. Magyarul amikor a motorhajtás mint "nagyfőnök" úgy gondolja magát, akkor nem előre megyünk a szánnal, hanem hátrafelé.[#csodalk][#conf]
Amikor szó szerint a valóság ennyire szembejön velünk azért az elég meredek dolog, hiszen közben abban a hitben is lehetünk, hogy szépen egyenletesen haladunk előre a programozott előtolási sebeséggel.
Ha ez az arányszám nagyobb mint 100% (volt már ilyen mérésem), akkor az a durva helyzet van, hogy adott pillanatokban a mozgás irányt is változtat. Magyarul amikor a motorhajtás mint "nagyfőnök" úgy gondolja magát, akkor nem előre megyünk a szánnal, hanem hátrafelé.[#csodalk][#conf]
Amikor szó szerint a valóság ennyire szembejön velünk azért az elég meredek dolog, hiszen közben abban a hitben is lehetünk, hogy szépen egyenletesen haladunk előre a programozott előtolási sebeséggel.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 november 05, 10:28
Írta: svejk Dátum 2019 november 05, 10:28
Nem lehet hogy ez utóbbi inkább durva motor-mechanika illesztetlenség esetén adódik, főleg a rezonancia frekik környékén?
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2019 november 05, 10:29
Írta: s7manbs8 Dátum 2019 november 05, 10:29
Ez a nagy hiba amúgy eléri a gép kottyanásának mértékét egyáltalán ?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 november 05, 10:41
Írta: svejk Dátum 2019 november 05, 10:41
Egy nagyobbacska (kb. 1000x1600) munkaterületű gyári kínai szíjas lézernél a prezentált mérésedhez hasonló dolgok látszottak a munkadarabon is. Főleg a gyorsulási és lassulási szakaszokon
(Y irányban 1 motor egy kb 1:3 áttételen keresztül kétoldalra kihajtva vitte az X hidat)
Sem a microstep állítások, sem a vezérlőprogram cseréje nem hozott eredményt. Sikertelen volt az encoderes léptetőmotor alkalmazása is, mivel nem lehetett a paraméterekhez hozzáférni.
Aztán ideiglenesen kapott ez a tengely egy 1:11-es áttétellel megfejelt 100 W-os AC szervot.
Itt már volt látványos javulás de a távolabbi terv az, hogy ez a része ki lesz cserélve golyósorsóra.
(Y irányban 1 motor egy kb 1:3 áttételen keresztül kétoldalra kihajtva vitte az X hidat)
Sem a microstep állítások, sem a vezérlőprogram cseréje nem hozott eredményt. Sikertelen volt az encoderes léptetőmotor alkalmazása is, mivel nem lehetett a paraméterekhez hozzáférni.
Aztán ideiglenesen kapott ez a tengely egy 1:11-es áttétellel megfejelt 100 W-os AC szervot.
Itt már volt látványos javulás de a távolabbi terv az, hogy ez a része ki lesz cserélve golyósorsóra.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 05, 11:46
Írta: 000000000 Dátum 2019 november 05, 11:46
Azt is beleméri a rendszer (hiszen ennél a mérésnél a szán elmozdulást mérem, azaz az egész CNC gép legvégső pontját), de a mechanikus kottyanási hiba nem ilyen, ott a sebesség és a gyorsulás mértéke akár egy nagységrenddel nagyobb impulzusként jelenik meg az ábrán.
Ha egy próbapadon csak a motor tengelyét mérem (természetesen annak a CNC gépnek a redukált inercia nyomatékával műterhelve, amit majd hajt a léptetőmotor), kihagyva ezáltal a gép mechanikáját, akkor szinte ugyanezek a mérési eredmények.
Tehát kimodható, a motorhajtás a legnagyobb főnök a láncban, az határoz meg minden valós rezdülést a hajtás elmélet idetartozó műszaki törvényei alapján. Ezek bemenő paramétereit pedig a motorra vonatkozó vasba öntött gyári gyári adatok jelentik. Ezeket az adatokat komolyabb gyártó közli egy motor adatlapon, és ezek beszédesek a szakembereknek önmagukban is.
Természetesen ezekhez a mérésekhez rendelkezem saját fejlesztésű, nagyon kis hibával rendelkező, gyakorlatilag etalonnak tekinthető step/dir jelgenerátorokkal is, amik az egység ugrástól kezdbve az "S" profilos gyorsításig bezárólag mindenféle step/dir alapjelet adnak a mérésekhez, pont azért, hogy a mérés legelején (alapjel szinten) a lehető legkisebb legyen a hiba. Ezeknek egy része van beépítve a Robsy CNC vezérlőkbe is.
Ez azért fontos, mert ha már a lánc elején valami "hitványság" megy a rendszerbe egy hobby CNC vezérlőjel kapcsán, akkor a világ legjobb motorhajtása is csak hitvány mérési eredményt produkálhat.
Egyébként meg ha a CNC lánc legvégén, az elmozduló szánnál mérünk a gép sajár vezérlőjén futtatott G kóddal, akkor az egész gépről kapunk egy minőségi képet szőröstül-bőröstül. A végeredmények kapcsán pedig vagy sírunk vagy örülünk majd.:)
Még egy dolog: Ez a kis prezentáció, és a mérési eredmények egy adott hobby kategóriájú léptető motoros hajtásról szól, de értelemszerűen a legkomolyabb ipari szervo hajtású CNC gép is bemérhető vele, és a végén kapunk valamilyen eredményt. Ahogy időm, lehetőségem engedi, majd ilyen mérésekről is beszámolok, főleg azért, hogy legyen összehasonlítási alapunk a játékos hobby "kapirgálás" meg a profi forgácsolás közötti minőségi különbségről.
Ha egy próbapadon csak a motor tengelyét mérem (természetesen annak a CNC gépnek a redukált inercia nyomatékával műterhelve, amit majd hajt a léptetőmotor), kihagyva ezáltal a gép mechanikáját, akkor szinte ugyanezek a mérési eredmények.
Tehát kimodható, a motorhajtás a legnagyobb főnök a láncban, az határoz meg minden valós rezdülést a hajtás elmélet idetartozó műszaki törvényei alapján. Ezek bemenő paramétereit pedig a motorra vonatkozó vasba öntött gyári gyári adatok jelentik. Ezeket az adatokat komolyabb gyártó közli egy motor adatlapon, és ezek beszédesek a szakembereknek önmagukban is.
Természetesen ezekhez a mérésekhez rendelkezem saját fejlesztésű, nagyon kis hibával rendelkező, gyakorlatilag etalonnak tekinthető step/dir jelgenerátorokkal is, amik az egység ugrástól kezdbve az "S" profilos gyorsításig bezárólag mindenféle step/dir alapjelet adnak a mérésekhez, pont azért, hogy a mérés legelején (alapjel szinten) a lehető legkisebb legyen a hiba. Ezeknek egy része van beépítve a Robsy CNC vezérlőkbe is.
Ez azért fontos, mert ha már a lánc elején valami "hitványság" megy a rendszerbe egy hobby CNC vezérlőjel kapcsán, akkor a világ legjobb motorhajtása is csak hitvány mérési eredményt produkálhat.
Egyébként meg ha a CNC lánc legvégén, az elmozduló szánnál mérünk a gép sajár vezérlőjén futtatott G kóddal, akkor az egész gépről kapunk egy minőségi képet szőröstül-bőröstül. A végeredmények kapcsán pedig vagy sírunk vagy örülünk majd.:)
Még egy dolog: Ez a kis prezentáció, és a mérési eredmények egy adott hobby kategóriájú léptető motoros hajtásról szól, de értelemszerűen a legkomolyabb ipari szervo hajtású CNC gép is bemérhető vele, és a végén kapunk valamilyen eredményt. Ahogy időm, lehetőségem engedi, majd ilyen mérésekről is beszámolok, főleg azért, hogy legyen összehasonlítási alapunk a játékos hobby "kapirgálás" meg a profi forgácsolás közötti minőségi különbségről.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 05, 11:51
Írta: 000000000 Dátum 2019 november 05, 11:51
Véletlenül erre is válaszoltam, amíg írtam az előző bejegyzésemet, sokat elárulna arról a lézergravír gépről, ha 10 perc alatt bemérnénk, és az eredmények birtokában megtennénk a változtatásokat a hibák kijavítása, lecsökkentése érdekében. Hol van helyileg az a CNC masina?
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2019 november 05, 13:25
Írta: svejk Dátum 2019 november 05, 13:25
Nem véletlen, hogy a kicsit is magára adó kínai cuccok is a saját motor-motorvezérlő párost erőltetik.
A saját motorjához van behangolva vezérlő, aztán más motorral meg vagy jó vagy nem.
A saját motorjához van behangolva vezérlő, aztán más motorral meg vagy jó vagy nem.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 06, 09:07
Írta: 000000000 Dátum 2019 november 06, 09:07
Egy újabb megdöbbentő, de nagyon tanulságos léptető motoros hajtás mérési eredményt mutatok nektek.
Ideális esetben ennek a szánnak 5 mm/s (300 mm/min) állandó előtolási sebességgel (kék vonalak +-5 mm/s szintek) kellene mozogni a CNC vezérlő kijelzése alapján. Ezzel szemben a durva valóság az, hogy egy 10.5/2.5=420%-os [#csodalk][#conf][#wilting] sávban állandó változás közepette, irányváltásokat is végrehajtva "teszi a dolgát és működik", ahogy szokták büszkén mondani egyesek itt a Fórumon. Pl. direkt az egyik negatív sebesség csúcshoz egy szálkeresztet tettem, és látható, hogy ebben a pillanatban éppen csúcssebességgel halad a szán (zöld út görbe) ne de nem előre, hanem HÁTRA. Hoppá!!!![#felkialtas]
Hatalmas tanulság ez a mérés azzal kapcsolatosan is, hogy micsoda "virtuális katyvaszban" élünk, CNC-zgetünk, hogy lesz a műszaki valóságból hit, vagy fordítva egyesek fejében. Pedig a dolog rendkívül egyszerű, hiszen a műszaki életben szinte mindig csak egy adat szokott igaz lenni, és jó dolog ezt tudni is, és törekedni illik mindig ennek megismerésére.
(https://hobbicncforum.hu/uploaded_images/2019/11/tn_72n94bkb3idqwxwjakb40_4936.jpg) (https://hobbicncforum.hu/uploaded_images/2019/11/72n94bkb3idqwxwjakb40_4936.jpg)
Ideális esetben ennek a szánnak 5 mm/s (300 mm/min) állandó előtolási sebességgel (kék vonalak +-5 mm/s szintek) kellene mozogni a CNC vezérlő kijelzése alapján. Ezzel szemben a durva valóság az, hogy egy 10.5/2.5=420%-os [#csodalk][#conf][#wilting] sávban állandó változás közepette, irányváltásokat is végrehajtva "teszi a dolgát és működik", ahogy szokták büszkén mondani egyesek itt a Fórumon. Pl. direkt az egyik negatív sebesség csúcshoz egy szálkeresztet tettem, és látható, hogy ebben a pillanatban éppen csúcssebességgel halad a szán (zöld út görbe) ne de nem előre, hanem HÁTRA. Hoppá!!!![#felkialtas]
Hatalmas tanulság ez a mérés azzal kapcsolatosan is, hogy micsoda "virtuális katyvaszban" élünk, CNC-zgetünk, hogy lesz a műszaki valóságból hit, vagy fordítva egyesek fejében. Pedig a dolog rendkívül egyszerű, hiszen a műszaki életben szinte mindig csak egy adat szokott igaz lenni, és jó dolog ezt tudni is, és törekedni illik mindig ennek megismerésére.
(https://hobbicncforum.hu/uploaded_images/2019/11/tn_72n94bkb3idqwxwjakb40_4936.jpg) (https://hobbicncforum.hu/uploaded_images/2019/11/72n94bkb3idqwxwjakb40_4936.jpg)
Cím: Re:Léptetőmotor
Írta: sastas Dátum 2019 november 08, 16:29
Írta: sastas Dátum 2019 november 08, 16:29
Szia!
Egy pár dolgot még kérdeznék, hátha úgy könyebben tudom értelmezni ezt a grafikont.
A vízszintes felbontás milyen időosztással van?
Milyen léptetőmotor, milyen vezérléssel, milyen hajtás, és hol mérsz a hajtásláncon belül?
Ha jól sejtem a mérőrendszer az a sajátod, lehet a vezérlő is, a hajtásláncból/mérési pontoról egy fotót is berakhatnál, ha van.
Egy pár dolgot még kérdeznék, hátha úgy könyebben tudom értelmezni ezt a grafikont.
A vízszintes felbontás milyen időosztással van?
Milyen léptetőmotor, milyen vezérléssel, milyen hajtás, és hol mérsz a hajtásláncon belül?
Ha jól sejtem a mérőrendszer az a sajátod, lehet a vezérlő is, a hajtásláncból/mérési pontoról egy fotót is berakhatnál, ha van.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 08, 18:06
Írta: 000000000 Dátum 2019 november 08, 18:06
Amit kérdeztél, az is rajta van a grafikonon, nézd meg alaposabban. Ha vissazolvasol, szinte minden más kérdésedre is ott a válasz.
Cím: Re:Léptetőmotor
Írta: sastas Dátum 2019 november 08, 19:31
Írta: sastas Dátum 2019 november 08, 19:31
Azt, hogy 0.1s-azt megtaláltam. Viszont, hogy ez mekkora tartomány azt legalább 3 féle képpen tudom értelmezni. Az gondolom neked egyértelmű, nekem nem.
A többit valóban megtaláltam.
A többit valóban megtaláltam.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 08, 20:08
Írta: 000000000 Dátum 2019 november 08, 20:08
A lila színű 0.1 s felirathoz tartozóan felette van egy lila színű lépték szakasz az időtengelyen. Amikor a kép készült sokkal élesebb és lilább volt ez a szakasz, de lementés után a jpg formátum elhomályosította, de így is a fehér időtengelyhez képest még jól kivehetően ott van ez a lila színű szakasz.
A 0.1 s pedig értelmeszerűen 1 tized másodpercet jelent.
A 0.1 s pedig értelmeszerűen 1 tized másodpercet jelent.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 16, 14:27
Írta: 000000000 Dátum 2019 november 16, 14:27
Szeretnék majd minél több fajta léptető (vagy akár szervo) hajtást tesztelgetni, ahogy időm engedni hobby vagy ipari kategóriában is. Az érdekesebb eseteket pedig itt majd megmutatom, kitárgyaljuk, tanulunk belőle.
Gyűlnek már az adatok, de még van bőven mit méregetni. Akiket érdekelnek ezek a mérések (lásd az utóbbi bejegyzéseim 6213-tól) a saját CNC rendszerére vonatkozóan, és első körben Bp. 2, 3, 4, 13 kerületében élnek, keressenek privát üzenetben, és egyeztetünk időpontot. Az alap mérések akár 15 perc alatt elvégezhetőek.
Gyűlnek már az adatok, de még van bőven mit méregetni. Akiket érdekelnek ezek a mérések (lásd az utóbbi bejegyzéseim 6213-tól) a saját CNC rendszerére vonatkozóan, és első körben Bp. 2, 3, 4, 13 kerületében élnek, keressenek privát üzenetben, és egyeztetünk időpontot. Az alap mérések akár 15 perc alatt elvégezhetőek.
Cím: Re:Léptetőmotor
Írta: istvan3 Dátum 2019 november 19, 10:09
Írta: istvan3 Dátum 2019 november 19, 10:09
Sziasztok!
Van valakinek tapasztalata ezekkel a manapság elterjedt kínai enkóderes visszacsatolt léptető motor rendszerekkel?
Többet tudnak ezek a motorok mint a sima léptetők, vagy csak egy enkóder van rábiggyesztve és ugyan olyan hamar kiesik a szinkronból?
Sajnos nyomaték görbét nem igazán találok sehol...
Van valakinek tapasztalata ezekkel a manapság elterjedt kínai enkóderes visszacsatolt léptető motor rendszerekkel?
Többet tudnak ezek a motorok mint a sima léptetők, vagy csak egy enkóder van rábiggyesztve és ugyan olyan hamar kiesik a szinkronból?
Sajnos nyomaték görbét nem igazán találok sehol...
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 november 19, 10:42
Írta: dtb Dátum 2019 november 19, 10:42
Nekem tavaly óta van 4db használatban,két külön gyártótól akkor nagyon olcsón sikerült vennem. (~$75/db volt akkor) Azon kívül, hogy az egyik tápkábel csatlakozója kilazult, és a rossz kontakt miatt félig elégett, más gondom nem volt vele. Szépen, csendben dolgoznak, nekem beváltak.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 november 19, 12:24
Írta: dtb Dátum 2019 november 19, 12:24
Ezekről van szó:
https://www.aliexpress.com/item/32836048823.html
https://www.aliexpress.com/item/32923572119.html
Ez utóbbi volt a szimpatikusabb.
https://www.aliexpress.com/item/32836048823.html
https://www.aliexpress.com/item/32923572119.html
Ez utóbbi volt a szimpatikusabb.
Cím: Re:Léptetőmotor
Írta: Egyújabbgépépítő Dátum 2019 november 19, 17:50
Írta: Egyújabbgépépítő Dátum 2019 november 19, 17:50
]Már volt róla szó. (http://[#t168p5986#)
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2019 november 19, 18:11
Írta: PSoft Dátum 2019 november 19, 18:11
[#t168p5986#]
Cím: Re:Léptetőmotor
Írta: rmkeh8a83 Dátum 2019 november 19, 19:36
Írta: rmkeh8a83 Dátum 2019 november 19, 19:36
Sziasztok adott a képen látható Berger Lahr motor megvan a vezérlő egység is kérdésem az lenne hogy ezeket a motorokat+vezérlőket lehet valahogy Mach3 mal vezérelni.
Mi szükséges ahoz hogy tudjam vezérelni.
Válaszokat köszönöm
(https://hobbicncforum.hu/uploaded_images/2019/11/tn_satq07662ac0mb9g43zg_2652.jpg) (https://hobbicncforum.hu/uploaded_images/2019/11/satq07662ac0mb9g43zg_2652.jpg)
Mi szükséges ahoz hogy tudjam vezérelni.
Válaszokat köszönöm
(https://hobbicncforum.hu/uploaded_images/2019/11/tn_satq07662ac0mb9g43zg_2652.jpg) (https://hobbicncforum.hu/uploaded_images/2019/11/satq07662ac0mb9g43zg_2652.jpg)
Cím: Re:Léptetőmotor
Írta: rmkeh8a83 Dátum 2019 november 19, 19:37
Írta: rmkeh8a83 Dátum 2019 november 19, 19:37
Meg egy kép közelebről
(https://hobbicncforum.hu/uploaded_images/2019/11/tn_hksex8g3tmgmwdh3jt38a_2652.jpg) (https://hobbicncforum.hu/uploaded_images/2019/11/hksex8g3tmgmwdh3jt38a_2652.jpg)
(https://hobbicncforum.hu/uploaded_images/2019/11/tn_hksex8g3tmgmwdh3jt38a_2652.jpg) (https://hobbicncforum.hu/uploaded_images/2019/11/hksex8g3tmgmwdh3jt38a_2652.jpg)
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2019 november 19, 20:36
Írta: s7manbs8 Dátum 2019 november 19, 20:36
A vezérlő egység bemeneteit kellene mutatni, hogy lássuk milyen jel kell neki.
Cím: Re:Léptetőmotor
Írta: rmkeh8a83 Dátum 2019 november 19, 20:53
Írta: rmkeh8a83 Dátum 2019 november 19, 20:53
Szia arról sajnos nincs képem jelenleg.
De rakok fel később.
De rakok fel később.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 24, 11:45
Írta: 000000000 Dátum 2019 november 24, 11:45
"Többet tudnak ezek a motorok mint a sima léptetők, vagy csak egy enkóder van rábiggyesztve és ugyan olyan hamar kiesik a szinkronból?
Sajnos nyomaték görbét nem igazán találok sehol..."
Motortól, szabályzó beállítástól függően 10-30%-al nagyob lesz a visszacsatolásnak köszönhetően így a léptetőmotoros hajtás nyomatéka, de sajnos ugyanúgy veszti el a nyomatékét magasabb fordulatszám esetén, mint egy normál hajtásnál.
Ezt meghaladó nyomaték esetén pedig ez is kiesik a szinkronból, de X időn belül ha a terhelő nyomaték újra kisebbé válik, és már képes korrigálni, akkor az aktuális pozíciót igyekszik újra felvenni és szinkronba kerülni, vagy ha betelt közben a pozíció hibatárolója, letilt.
Általában egész lépéses felbontást nem tudnak, 400 step/fordulattól kezdődnek a beállítási lehetőségek.
Van néhány konkrét mérési adatom ilyen hajtásokkal kapcsolatban a Robsy motor dinamikai mérőrendszer tesztek kapcsán, ha további részletek érdekelnek még, keress meg.
Sajnos nyomaték görbét nem igazán találok sehol..."
Motortól, szabályzó beállítástól függően 10-30%-al nagyob lesz a visszacsatolásnak köszönhetően így a léptetőmotoros hajtás nyomatéka, de sajnos ugyanúgy veszti el a nyomatékét magasabb fordulatszám esetén, mint egy normál hajtásnál.
Ezt meghaladó nyomaték esetén pedig ez is kiesik a szinkronból, de X időn belül ha a terhelő nyomaték újra kisebbé válik, és már képes korrigálni, akkor az aktuális pozíciót igyekszik újra felvenni és szinkronba kerülni, vagy ha betelt közben a pozíció hibatárolója, letilt.
Általában egész lépéses felbontást nem tudnak, 400 step/fordulattól kezdődnek a beállítási lehetőségek.
Van néhány konkrét mérési adatom ilyen hajtásokkal kapcsolatban a Robsy motor dinamikai mérőrendszer tesztek kapcsán, ha további részletek érdekelnek még, keress meg.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2019 november 24, 13:04
Írta: PSoft Dátum 2019 november 24, 13:04
Látványos kis videók sokasága a YouTube-n...
(most nem keresek)
Odébb löki az ember a nyomtatója "X" kocsiját és mintha mi sem történt volna...
A léptecs és a kocsi azonnal? visszaáll a pozícióra, látszólag hiba nélkül...folytatódik a nyomtatás.
Valóban így van, mennyi ennek a valóság alapja?
(most nem keresek)
Odébb löki az ember a nyomtatója "X" kocsiját és mintha mi sem történt volna...
A léptecs és a kocsi azonnal? visszaáll a pozícióra, látszólag hiba nélkül...folytatódik a nyomtatás.
Valóban így van, mennyi ennek a valóság alapja?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 24, 13:46
Írta: 000000000 Dátum 2019 november 24, 13:46
Van valóság alapja, de ezek a videók a gyártó speciális tesztjei ismeretlen step/dir jel küldővel és hajtás beállítások mellett.
Csak ugyebár a hobby CNC step/dir vezérlők alap esetben a vakvilágba nyomják ki a jeleket (sokszor hitvány minőségben), így hiába folytatja majd valamikor a mozgást a hajtás, ameddig állt, azok a pozíciók a munkadarabon már elvesztek, azaz a selejt garantált.
Csak ugyebár a hobby CNC step/dir vezérlők alap esetben a vakvilágba nyomják ki a jeleket (sokszor hitvány minőségben), így hiába folytatja majd valamikor a mozgást a hajtás, ameddig állt, azok a pozíciók a munkadarabon már elvesztek, azaz a selejt garantált.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2019 november 24, 13:55
Írta: PSoft Dátum 2019 november 24, 13:55
Köszönöm!
Azt az időt nem tudtam hova tenni, -illetve az az alatt történteket- amíg a hajtás visszaáll a "sokk" előtti pozícióra.
Talán egy hobby 3D nyomtatónál még nem is biztos, hogy selejt az a selejt...
De valahogy...én is így gondoltam ahogy az utolsó mondatod végén írod.
Azt az időt nem tudtam hova tenni, -illetve az az alatt történteket- amíg a hajtás visszaáll a "sokk" előtti pozícióra.
Talán egy hobby 3D nyomtatónál még nem is biztos, hogy selejt az a selejt...
De valahogy...én is így gondoltam ahogy az utolsó mondatod végén írod.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 24, 14:05
Írta: 000000000 Dátum 2019 november 24, 14:05
"Talán egy hobby 3D nyomtatónál még nem is biztos, hogy selejt az a selejt..."
Szinte biztos a selejt, mert közben valószínűleg a szál előtolás nem áll, és szegény így egy pontba vagy csak a másik nem elakadt tengely mentén próbál egy jó nagy sz@r kupacot kinyomtatni, ameddig nem sül be a nyomtatófej is.
Szinte biztos a selejt, mert közben valószínűleg a szál előtolás nem áll, és szegény így egy pontba vagy csak a másik nem elakadt tengely mentén próbál egy jó nagy sz@r kupacot kinyomtatni, ameddig nem sül be a nyomtatófej is.
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2019 november 24, 16:43
Írta: s7manbs8 Dátum 2019 november 24, 16:43
Bizonyos esetekben apróbb lépésvesztést tud még korrigálni, ha pl. egy kis dudor miatt megakadt a lépés és pár mm-t arrébb van, azt még utolérheti.
Mondjuk nálam volt olyan nyomat, hogy egy kis göb keletkezett egy helyen és mindig ott le is akadt emiatt, de ha lett volna ilyen nyomvonal követő szervó benne, ment volna tovább, persze a második szintnél, megint ugyanott elakad ...:)
Mondjuk nálam volt olyan nyomat, hogy egy kis göb keletkezett egy helyen és mindig ott le is akadt emiatt, de ha lett volna ilyen nyomvonal követő szervó benne, ment volna tovább, persze a második szintnél, megint ugyanott elakad ...:)
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2019 november 24, 17:04
Írta: PSoft Dátum 2019 november 24, 17:04
Persze ne abból indulunk ki hogy "namostjólalrébblököm"...
Mert ez egyáltalán nem életszerű helyzet.
Ha az a nyomtató -maradjunk ennél a példánál- jól be van állítva, -mechanika, motormeghajtók, sebességek, gyorsulás, adagolás, stb.- nem is lehet ilyen probléma.
Mert ez egyáltalán nem életszerű helyzet.
Ha az a nyomtató -maradjunk ennél a példánál- jól be van állítva, -mechanika, motormeghajtók, sebességek, gyorsulás, adagolás, stb.- nem is lehet ilyen probléma.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2019 november 24, 17:38
Írta: 000000000 Dátum 2019 november 24, 17:38
"Ha az a nyomtató -maradjunk ennél a példánál- jól be van állítva, -mechanika, motormeghajtók, sebességek, gyorsulás, adagolás, stb.- nem is lehet ilyen probléma."
Ekkor nem. Ha így nézzük, akkor tulajdonképpen kár "bohóckodni" ezekkel a hobby kategóriájú encoderes léptetőmotoros hajtásokkal, hiszen a lelkük a léptető motor az nem lesz szervomotor képességű (erősen eső továbbra is a nyomatékuk, zajonganak, lengedeznek, rezegnek, stb.). Így aztán majdnem hiába telepítünk köré egy kis csecsebecsét, a vasba öntött valós motor képességek felülírják az álmokat.
Az ipari kategória persze ebben az encoderes stepper kategóriában is más, és bizony vannak olyan alkalmazások, amikor összességében (előnyök/hátrányok mérlegelése)akár ki is válthatják az igazi szervomotoros hajtásokat.
Ekkor nem. Ha így nézzük, akkor tulajdonképpen kár "bohóckodni" ezekkel a hobby kategóriájú encoderes léptetőmotoros hajtásokkal, hiszen a lelkük a léptető motor az nem lesz szervomotor képességű (erősen eső továbbra is a nyomatékuk, zajonganak, lengedeznek, rezegnek, stb.). Így aztán majdnem hiába telepítünk köré egy kis csecsebecsét, a vasba öntött valós motor képességek felülírják az álmokat.
Az ipari kategória persze ebben az encoderes stepper kategóriában is más, és bizony vannak olyan alkalmazások, amikor összességében (előnyök/hátrányok mérlegelése)akár ki is válthatják az igazi szervomotoros hajtásokat.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2019 november 24, 18:30
Írta: dtb Dátum 2019 november 24, 18:30
Én használom is ezeket, és nagyon beváltak. Van egy nagyon jó plusz tulajdonságuk, az ALARM kimenet. Ez, ha be van kötve a vezérlőbe, akkor hiba esetén meg tudja állítani pl. a marást, vagy a nyomtatást, és akkor esélyes, hogy nincs selejt. :-)
Cím: Re:Léptetőmotor
Írta: flac72 Dátum 2019 december 15, 18:51
Írta: flac72 Dátum 2019 december 15, 18:51
Sziasztok,
építettem egy 3D nyomtatót, és az elején jól működöt, majd a 3. 4. nyomtatás után néha előjön egy olyan hiba, hogy a léptetőmotor kerregő hanggal elveszti a lépéseket, nem lép tovább, majd mint ha nem történt volna semmi folytatja a nyomtatást, persze már egy hibás pozícióban. A hiba teljesen véletlenszerűen jön elő van amikor 3 óra, van amikor 1 óra nyomtatás után. A léptetőmotorok amiket használok azok 3,6 fokos osztásúak, és 24V-ról van meghajtva, a motor típusa P532.258.004.89. A mechanika golyósorsós kialakítású. A motor elvileg 0,2Nm tartónyomatékú. Mi okozhatja ezt a hibát?
Előre is köszönöm a segítséget
Laci
építettem egy 3D nyomtatót, és az elején jól működöt, majd a 3. 4. nyomtatás után néha előjön egy olyan hiba, hogy a léptetőmotor kerregő hanggal elveszti a lépéseket, nem lép tovább, majd mint ha nem történt volna semmi folytatja a nyomtatást, persze már egy hibás pozícióban. A hiba teljesen véletlenszerűen jön elő van amikor 3 óra, van amikor 1 óra nyomtatás után. A léptetőmotorok amiket használok azok 3,6 fokos osztásúak, és 24V-ról van meghajtva, a motor típusa P532.258.004.89. A mechanika golyósorsós kialakítású. A motor elvileg 0,2Nm tartónyomatékú. Mi okozhatja ezt a hibát?
Előre is köszönöm a segítséget
Laci
Cím: Re:Léptetőmotor
Írta: Victorious Dátum 2020 január 19, 20:36
Írta: Victorious Dátum 2020 január 19, 20:36
Sziasztok,
A segítségeteket szeretném kérni ezzel a motorral kapcsolatban!!! Moons 34HY1416-02
Többen vettünk már innen belőle, ( Pl. SándorP ) de valami gond van vele, annak ellenére, hogy minden tekintetben újszerű állapotban van.
A tünet az, hogy a vezérlőt elindítva (üresen, csak a motorral), "tartó állapotban" kb. 3-5 lépéseket folyamatosan ugrál, és persze nagyon hangos.
Vezérlő: HBS860H 48V-ról táplálva.
A motorról nem találtam semmilyen adatot, de az eladó az alábbiakat adta meg:
Moons 34HY1416-02. Bipoláris 4 vezetékes , 1.8 fokos lépésszögű.
Amit feltártam:
Súly: 2500g
Tekercsek száma: 8
Menetszám: 12
Huzalátmérő: 1.25
Vasmag hossza: 60mm
Vasmag szélessége: 10mm
Forgórész fogas sor: 4
Forgórész fogszám soronként: 50
A tekercsek irányát, és kötéseit a rajzomon feltüntettem.
Mi lehet a hiba oka? Mit nem csinálunk jól?
... egyébként nagyon erős motornak tűnik, és nem tudom elhinni, hogy 10-ből 10 hibás legyen ...
Köszönök előre is minden jó ötletet, és választ!
... valaki írt rá a bekötéssel kapcsolatban nyilvánosban, de azt törölték ...
Olyasmit olvastam, hogy rosszul vannak kötve a tekercsek?
A rajzom a motor kötéseinek alapján készült.
Ha ez okozza a gondot, akkor viszont hibásan lenne kötve gyárilag?
(https://hobbicncforum.hu/uploaded_images/2020/01/tn_iq4y782jg4pj7qwiti0wf_6871.png) (https://hobbicncforum.hu/uploaded_images/2020/01/iq4y782jg4pj7qwiti0wf_6871.png) (https://hobbicncforum.hu/uploaded_images/2020/01/tn_ksqmy2ssjhsspn2ett7m_6871.jpg) (https://hobbicncforum.hu/uploaded_images/2020/01/ksqmy2ssjhsspn2ett7m_6871.jpg) (https://hobbicncforum.hu/uploaded_images/2020/01/tn_p0sn7tnv8xejnf793vz3b_6871.jpg) (https://hobbicncforum.hu/uploaded_images/2020/01/p0sn7tnv8xejnf793vz3b_6871.jpg) (https://hobbicncforum.hu/uploaded_images/2020/01/tn_kn02ax8v6qhhqajt3fkjq_6871.jpg) (https://hobbicncforum.hu/uploaded_images/2020/01/kn02ax8v6qhhqajt3fkjq_6871.jpg)
A segítségeteket szeretném kérni ezzel a motorral kapcsolatban!!! Moons 34HY1416-02
Többen vettünk már innen belőle, ( Pl. SándorP ) de valami gond van vele, annak ellenére, hogy minden tekintetben újszerű állapotban van.
A tünet az, hogy a vezérlőt elindítva (üresen, csak a motorral), "tartó állapotban" kb. 3-5 lépéseket folyamatosan ugrál, és persze nagyon hangos.
Vezérlő: HBS860H 48V-ról táplálva.
A motorról nem találtam semmilyen adatot, de az eladó az alábbiakat adta meg:
Moons 34HY1416-02. Bipoláris 4 vezetékes , 1.8 fokos lépésszögű.
Amit feltártam:
Súly: 2500g
Tekercsek száma: 8
Menetszám: 12
Huzalátmérő: 1.25
Vasmag hossza: 60mm
Vasmag szélessége: 10mm
Forgórész fogas sor: 4
Forgórész fogszám soronként: 50
A tekercsek irányát, és kötéseit a rajzomon feltüntettem.
Mi lehet a hiba oka? Mit nem csinálunk jól?
... egyébként nagyon erős motornak tűnik, és nem tudom elhinni, hogy 10-ből 10 hibás legyen ...
Köszönök előre is minden jó ötletet, és választ!
... valaki írt rá a bekötéssel kapcsolatban nyilvánosban, de azt törölték ...
Olyasmit olvastam, hogy rosszul vannak kötve a tekercsek?
A rajzom a motor kötéseinek alapján készült.
Ha ez okozza a gondot, akkor viszont hibásan lenne kötve gyárilag?
(https://hobbicncforum.hu/uploaded_images/2020/01/tn_iq4y782jg4pj7qwiti0wf_6871.png) (https://hobbicncforum.hu/uploaded_images/2020/01/iq4y782jg4pj7qwiti0wf_6871.png) (https://hobbicncforum.hu/uploaded_images/2020/01/tn_ksqmy2ssjhsspn2ett7m_6871.jpg) (https://hobbicncforum.hu/uploaded_images/2020/01/ksqmy2ssjhsspn2ett7m_6871.jpg) (https://hobbicncforum.hu/uploaded_images/2020/01/tn_p0sn7tnv8xejnf793vz3b_6871.jpg) (https://hobbicncforum.hu/uploaded_images/2020/01/p0sn7tnv8xejnf793vz3b_6871.jpg) (https://hobbicncforum.hu/uploaded_images/2020/01/tn_kn02ax8v6qhhqajt3fkjq_6871.jpg) (https://hobbicncforum.hu/uploaded_images/2020/01/kn02ax8v6qhhqajt3fkjq_6871.jpg)
Cím: Re:Léptetőmotor
Írta: Peppe51 Dátum 2020 január 19, 21:01
Írta: Peppe51 Dátum 2020 január 19, 21:01
Szervusz,
ide száműztek tehát. Ismétlem:
elmélet:
https://www.sciencedirect.com/topics/engineering/stator-pole
(https://hobbicncforum.hu/uploaded_images/2020/01/tn_ea4fk3w60si2nu82v4ct2_2600.jpg) (https://hobbicncforum.hu/uploaded_images/2020/01/ea4fk3w60si2nu82v4ct2_2600.jpg)
ide száműztek tehát. Ismétlem:
elmélet:
https://www.sciencedirect.com/topics/engineering/stator-pole
(https://hobbicncforum.hu/uploaded_images/2020/01/tn_ea4fk3w60si2nu82v4ct2_2600.jpg) (https://hobbicncforum.hu/uploaded_images/2020/01/ea4fk3w60si2nu82v4ct2_2600.jpg)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2020 január 19, 21:04
Írta: svejk Dátum 2020 január 19, 21:04
Valószínű a tekercsek induktivitás értékében találod meg a választ.
Ha van lehetőséged mérd meg és hasonlítsd össze egy olyan motoréval amit a vezérlődhöz ajánlanak.
Lehetne hókuszpókolni külső tekercsekkel vagy a vezérlő PWM körébe belepiszkálni, de nem olyan drága dolgok ezek, hogy ne lehessen túllépni rajtuk.
Ha van lehetőséged mérd meg és hasonlítsd össze egy olyan motoréval amit a vezérlődhöz ajánlanak.
Lehetne hókuszpókolni külső tekercsekkel vagy a vezérlő PWM körébe belepiszkálni, de nem olyan drága dolgok ezek, hogy ne lehessen túllépni rajtuk.
Cím: Re:Léptetőmotor
Írta: attila820224 Dátum 2020 január 19, 21:13
Írta: attila820224 Dátum 2020 január 19, 21:13
Szia!
A piros színú tekercsek az az "A" fázis, a kékszínű a "B" fázis.
Idsmeretlen motornál én a vezérlő kimenetére minden vezetékkel 1db ellenállást sorba kötnék és az áramot a vezérlőn levenném minimumra, mert, ha rossz a tekercsbekötés rövidzárként viselkedik a motor.Tönkremehet a vezérlő.
A piros színú tekercsek az az "A" fázis, a kékszínű a "B" fázis.
Idsmeretlen motornál én a vezérlő kimenetére minden vezetékkel 1db ellenállást sorba kötnék és az áramot a vezérlőn levenném minimumra, mert, ha rossz a tekercsbekötés rövidzárként viselkedik a motor.Tönkremehet a vezérlő.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2020 január 19, 21:16
Írta: svejk Dátum 2020 január 19, 21:16
Mondjuk ha már ennyire kivesézted a motort megpróbálhatod az azonos pólusú tekercsek sorba kötését.
Cím: Re:Léptetőmotor
Írta: Nagy Zoli Dátum 2020 január 19, 22:28
Írta: Nagy Zoli Dátum 2020 január 19, 22:28
Ezt a motort gyárilag egy A4989 IC és 4db IRLR024N FET félhídból kialakított áramkör vitte 24V-ról. A kötése biztosan jo... Tudok adni egy darab a teljes panelről "körbevágott " meghajtó részt ha valaki hajlandó a vezető sávokra "rátákolni ". Az IC step dir -es!
Cím: Re:Léptetőmotor
Írta: Nagy Zoli Dátum 2020 január 19, 22:30
Írta: Nagy Zoli Dátum 2020 január 19, 22:30
Ez kb ugyanaz lehet: https://www.thingiverse.com/thing:40540
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2020 január 19, 22:36
Írta: B.Zoltán Dátum 2020 január 19, 22:36
Érdemes lenne, ahogy a Svejk is írja , a most párhuzamosan kötött 2-2 tekercset sorosan kötni.
Lehet, hogy túl kicsi az ellenállása, és az induktivitása így a vezérlő számára, és azt nem szereti.
Lehet, hogy túl kicsi az ellenállása, és az induktivitása így a vezérlő számára, és azt nem szereti.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2020 január 19, 22:56
Írta: PSoft Dátum 2020 január 19, 22:56
Talán, ez lehetett az a meghajtó amiről beszélsz?
Itt is azokat a motormeghajtókat használja. (http://www.cravtec.com/rowery/kontakt/2-lukasz-lis)
(https://hobbicncforum.hu/uploaded_images/2020/01/tn_b5bjca9nufazn2gun9km_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2020/01/b5bjca9nufazn2gun9km_1068.jpg)
Itt is azokat a motormeghajtókat használja. (http://www.cravtec.com/rowery/kontakt/2-lukasz-lis)
(https://hobbicncforum.hu/uploaded_images/2020/01/tn_b5bjca9nufazn2gun9km_1068.jpg) (https://hobbicncforum.hu/uploaded_images/2020/01/b5bjca9nufazn2gun9km_1068.jpg)
Cím: Re:Léptetőmotor
Írta: Nagy Zoli Dátum 2020 január 20, 06:36
Írta: Nagy Zoli Dátum 2020 január 20, 06:36
Igen erre gondoltam :)
Cím: Re:Léptetőmotor
Írta: robokacsa Dátum 2020 január 20, 06:44
Írta: robokacsa Dátum 2020 január 20, 06:44
En már tegnap este írtam neked, de törölve lett mivel rossz helyen tetted fel a kérdést. A lényeg, az első rajz szerint ha bekötöd a vezérlőbe a motort, lehet el sem indul. Altalaban ugy szoktak jelölni a tekercsvégeket, es a vezerlő bekötését, hogy első tekercs A-B, masodik C-D.
Namost a te rajzod A-C és B-D. Mondjuk ha figyelsz a bekötésre, akkor mindegy hogyan jelölöd, csak jo legyen
Namost a te rajzod A-C és B-D. Mondjuk ha figyelsz a bekötésre, akkor mindegy hogyan jelölöd, csak jo legyen
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2020 január 20, 08:30
Írta: 000000000 Dátum 2020 január 20, 08:30
"A tünet az, hogy a vezérlőt elindítva (üresen, csak a motorral), "tartó állapotban" kb. 3-5 lépéseket folyamatosan ugrál, és persze nagyon hangos."
Vannak olyan célfeladatra (pl. banki automata) tervezett motorok, amik csak egész lépésre alkamasak a mágneses mező kontsrukciójuk miatt. Ez a Nema34-es típus, vagy pl. a Nema23 A23KMC050CN02CA is ilyen. Nem igazán alkalmasak CNC gép hajtáshoz, mert nem lehet ezeket normálisan microstep üzemben használni.
Vannak olyan célfeladatra (pl. banki automata) tervezett motorok, amik csak egész lépésre alkamasak a mágneses mező kontsrukciójuk miatt. Ez a Nema34-es típus, vagy pl. a Nema23 A23KMC050CN02CA is ilyen. Nem igazán alkalmasak CNC gép hajtáshoz, mert nem lehet ezeket normálisan microstep üzemben használni.
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2020 január 20, 15:32
Írta: KBalázs Dátum 2020 január 20, 15:32
Azt mondod, hogy az adok-veszekben sokat látott
Minebea 23KM-C050CN02CA (enkóderes)
Minebea 23KM-C050CN01CA (anélküli)
motorok konstrukcióilag alkalmatlanok CNC hajtásához (microstep-gond)?
Ezzel a problémával más is találkozott már itt?
Akár igen/nem, írja már le a véleményét, komolyan érdekelne.
Minebea 23KM-C050CN02CA (enkóderes)
Minebea 23KM-C050CN01CA (anélküli)
motorok konstrukcióilag alkalmatlanok CNC hajtásához (microstep-gond)?
Ezzel a problémával más is találkozott már itt?
Akár igen/nem, írja már le a véleményét, komolyan érdekelne.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2020 január 20, 17:23
Írta: 000000000 Dátum 2020 január 20, 17:23
Nem mondtam, hanem azt írtam.
Cím: Re:Léptetőmotor
Írta: Nagy Zoli Dátum 2020 január 20, 17:24
Írta: Nagy Zoli Dátum 2020 január 20, 17:24
Ezekre a motorokra még senki sem panaszkodott, biztos vagy benne amit írtál? Ha kipróbálod küldök egyet ajándékba.
Cím: Re:Léptetőmotor
Írta: Victorious Dátum 2020 január 20, 18:15
Írta: Victorious Dátum 2020 január 20, 18:15
Szia,
Természetesen nem állt szándékomban rontani a motorjaid hírét, csak valóban a megoldás érdekelne, hiszen pont azért vettem 6db-ot, mert dolgozni szeretnék velük, és mert egyébként bennem fel sem merült, hogy gond lehet egy közönséges bipol motorral.
Ha eddig senki sem panaszkodott, akkor szerintem megoldás lehetne, ha meg tudnánk kérdezni olyas valakit aki szintén vett ilyet, és használja, hogy neki hogyan sikerült munkára fogni?
Egyébként pont azért említettem, SándorP-t mert ő is vett belőle tőled, és neki is ugyanezt csinálják a motorok DM860-as vezérlővel, és ő is tanácstalan ...
Természetesen nem állt szándékomban rontani a motorjaid hírét, csak valóban a megoldás érdekelne, hiszen pont azért vettem 6db-ot, mert dolgozni szeretnék velük, és mert egyébként bennem fel sem merült, hogy gond lehet egy közönséges bipol motorral.
Ha eddig senki sem panaszkodott, akkor szerintem megoldás lehetne, ha meg tudnánk kérdezni olyas valakit aki szintén vett ilyet, és használja, hogy neki hogyan sikerült munkára fogni?
Egyébként pont azért említettem, SándorP-t mert ő is vett belőle tőled, és neki is ugyanezt csinálják a motorok DM860-as vezérlővel, és ő is tanácstalan ...
Cím: Re:Léptetőmotor
Írta: Victorious Dátum 2020 január 20, 18:21
Írta: Victorious Dátum 2020 január 20, 18:21
Köszi a választ!
Teljesen egyetértek a bekötési javaslatoddal, nekem is így logikus, továbbá a motor gyári kábelvégén is ilyen sorrendben vannak rendezve a kivezetések...
Egyébként a rajzomra a betű jeleket én csak rámásoltam a motor paneljáról.
A rajz célja az volt, hogy a motorról átlátható vázlatot tudjak készíteni, hogy érthető legyen ha hiba van a kötéseknél.
Még viszonylag kezdő vagyok a léptetőmotorok terén, ezért is fordultam a csoporthoz a kérdésemmel.
Teljesen egyetértek a bekötési javaslatoddal, nekem is így logikus, továbbá a motor gyári kábelvégén is ilyen sorrendben vannak rendezve a kivezetések...
Egyébként a rajzomra a betű jeleket én csak rámásoltam a motor paneljáról.
A rajz célja az volt, hogy a motorról átlátható vázlatot tudjak készíteni, hogy érthető legyen ha hiba van a kötéseknél.
Még viszonylag kezdő vagyok a léptetőmotorok terén, ezért is fordultam a csoporthoz a kérdésemmel.
Cím: Re:Léptetőmotor
Írta: Victorious Dátum 2020 január 20, 18:29
Írta: Victorious Dátum 2020 január 20, 18:29
A motor átalakítását csak a legvégső megoldásnak tartogatnám, mert a sorba kötés az egyenlő azzal, hogy kidobjam belőle a gyári kötőpanelt, és bele faragjak egyéb megoldást.
Felmerült bennem már gondolatként a teljes áttekercselés is, mert 8db 12 menetes tekercset feltekerni még kézzel sem akkora dolog, csak naaa.
No meg mi a gar ezek után arra, hogy azután jó lesz...
Az eladó említette azt is, hogy ő ingyenesen is elküldene egyet bárkinek tesztelésre ... ami nagyon korrekt felvetés.
SándorP említette, hogy neki törött füllel érkezett az egyik motor, hála a jó postának :/
Talán célszerű lenne azt boncolgatni tovább.
Felmerült bennem már gondolatként a teljes áttekercselés is, mert 8db 12 menetes tekercset feltekerni még kézzel sem akkora dolog, csak naaa.
No meg mi a gar ezek után arra, hogy azután jó lesz...
Az eladó említette azt is, hogy ő ingyenesen is elküldene egyet bárkinek tesztelésre ... ami nagyon korrekt felvetés.
SándorP említette, hogy neki törött füllel érkezett az egyik motor, hála a jó postának :/
Talán célszerű lenne azt boncolgatni tovább.
Cím: Re:Léptetőmotor
Írta: Nagy Zoli Dátum 2020 január 20, 18:35
Írta: Nagy Zoli Dátum 2020 január 20, 18:35
Ezt a 23asokra írtam, hogy még senki nem panaszkodik, SandorPvel beszéltem többször telefonon a problémáról a 34el de akkor még kevés áram volt a gyanú.
Robsy, amcsi oldalakon is keresgéltem de nem találtam semmi infót egész lépésre specializált motorról.
Egy 34est is felajánlok, ha vállalod hogy hullára teszteled :) (a soros bekötésre én is kiváncsi lennék, ha lesz este időm akkor átkötök egyet, de csak dm556 van kéznél hozzá)
Robsy, amcsi oldalakon is keresgéltem de nem találtam semmi infót egész lépésre specializált motorról.
Egy 34est is felajánlok, ha vállalod hogy hullára teszteled :) (a soros bekötésre én is kiváncsi lennék, ha lesz este időm akkor átkötök egyet, de csak dm556 van kéznél hozzá)
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2020 január 20, 18:48
Írta: ANTAL GÁBOR Dátum 2020 január 20, 18:48
Csak egy apró kérdés : " Alnico mágnessel vagy neodímiummal van szerelve a motor ?
Mert ha Alnico és szétszedted ( hogy menetszámot huzalátmérőt stb mérj)akkor mehet a kukába , abból már nem lesz motor .....
Mert ha Alnico és szétszedted ( hogy menetszámot huzalátmérőt stb mérj)akkor mehet a kukába , abból már nem lesz motor .....
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2020 január 20, 19:17
Írta: dtb Dátum 2020 január 20, 19:17
Ezt a szétszedés egyenlő a kukával dolgot már más is írta. Leírná valaki pontosan, hogy miért megy tönkre? Akkor is tönkre megy, ha csak a két fedelet (csapágyházat) bontjuk meg, vagy az is kell, hogy ki legyen véve a tengely a motor testből? Jópár N17 motort szétszedtem, az 5 vezetékesből, és átforrasztottam 4 vezetékesre, és jó lett. Csat tudni szeretném a miért-et...
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2020 január 20, 19:39
Írta: 000000000 Dátum 2020 január 20, 19:39
A "senki" biztos nem stimmel, mert itt a fórumon is jelezte valaki már. [#t263p137#]
Aztán én ezt a motor problémát már privátban is megírtam neked 4 hónappal ezelőtt (van tőled ilyen léptető motorom), mert kézzel, szemmmel, füllel is érezhető a problémája, amikor forogn egy meghajtóra kötve. A Robsy motor dinamikai mérőrendszer teszt eredmények (majd felteszem ide a tanulságos és elkeserítő diagramokat, adatokat) pedig egyértelműen bizonyítják a súlyos működési problémákat.
Ha lesz alkalmam, bemérhetem a Nema34-es típust is, amikre most pár ember panaszkodik, és én csak nekik válaszoltam a 6299-ben, ahol világosan leírtam, mi a fő gond.
Egyébként meg ez az egész egy remek példa arra, hogy mennyire semmitmondó az a szó, érv, ami itt népszerű és gyakori válasz kritikákra a Fórumon, hogy valami ugyebár rámondás alapon működik, pedig a valós, megmért fő műszaki paraméterek, tények meg közben siralmasak.[#csodalk]
Aztán én ezt a motor problémát már privátban is megírtam neked 4 hónappal ezelőtt (van tőled ilyen léptető motorom), mert kézzel, szemmmel, füllel is érezhető a problémája, amikor forogn egy meghajtóra kötve. A Robsy motor dinamikai mérőrendszer teszt eredmények (majd felteszem ide a tanulságos és elkeserítő diagramokat, adatokat) pedig egyértelműen bizonyítják a súlyos működési problémákat.
Ha lesz alkalmam, bemérhetem a Nema34-es típust is, amikre most pár ember panaszkodik, és én csak nekik válaszoltam a 6299-ben, ahol világosan leírtam, mi a fő gond.
Egyébként meg ez az egész egy remek példa arra, hogy mennyire semmitmondó az a szó, érv, ami itt népszerű és gyakori válasz kritikákra a Fórumon, hogy valami ugyebár rámondás alapon működik, pedig a valós, megmért fő műszaki paraméterek, tények meg közben siralmasak.[#csodalk]
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2020 január 20, 19:49
Írta: ANTAL GÁBOR Dátum 2020 január 20, 19:49
A kulcsszó :demagnetizációs görbe ( fejből demagnetisation curve ) Az Alnico B max ja meghaladja a neodímiumét , de csak zárt vaskörben . Ha megbomlik a vaskör akkor a B értéke a kb a harmadára esik aztán kampó.....
A neodímuim az más , annál más a B, H görbe lefutása , ott nincs ilyen jelenség ( természetesen szobahőmérsékletről beszélünk) .. Magasabb hőmérsékleten a neodímium is lemágneseződik
Csináltam annó egy kísérletet : egy Alnico-s léptecset generátoros üzemben teszteltem ( nemcsak üres járás hanem terhelés is ) . Aztán a leggondosabban "csőbe" húztam majd vissza .. Jelentősen leesett a kapott feszültség . Majd kihúztam és vissza , no akkor már csapnivaló volt az indukálódott feszültség ( Kb a harmada az eredetinek ) Vagyis a vaskörét elvesztő Alnico az már nem is mágnes . No motoros üzemben is hasonló a dolog ,
Látszatra működik csak nyomatéka nincsen ( a nyomaték az
I és a B lineáris függvénye )
Szerencsére változik a világ . Az Alnico az nagyon jó és piszok olcsó csak macerás felmágnesezni , A neodímium az drágább de nincs vele gond , egyre több léptetőt gyártó cég áll át a neodímiumra de ezt sajnos nem írja le az adatlapon , vagyis szétszedni egy ismeretlen motort az kockázatos
A neodímuim az más , annál más a B, H görbe lefutása , ott nincs ilyen jelenség ( természetesen szobahőmérsékletről beszélünk) .. Magasabb hőmérsékleten a neodímium is lemágneseződik
Csináltam annó egy kísérletet : egy Alnico-s léptecset generátoros üzemben teszteltem ( nemcsak üres járás hanem terhelés is ) . Aztán a leggondosabban "csőbe" húztam majd vissza .. Jelentősen leesett a kapott feszültség . Majd kihúztam és vissza , no akkor már csapnivaló volt az indukálódott feszültség ( Kb a harmada az eredetinek ) Vagyis a vaskörét elvesztő Alnico az már nem is mágnes . No motoros üzemben is hasonló a dolog ,
Látszatra működik csak nyomatéka nincsen ( a nyomaték az
I és a B lineáris függvénye )
Szerencsére változik a világ . Az Alnico az nagyon jó és piszok olcsó csak macerás felmágnesezni , A neodímium az drágább de nincs vele gond , egyre több léptetőt gyártó cég áll át a neodímiumra de ezt sajnos nem írja le az adatlapon , vagyis szétszedni egy ismeretlen motort az kockázatos
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2020 január 20, 21:10
Írta: B.Zoltán Dátum 2020 január 20, 21:10
Én a fénykép alapján úgy látom, hogy a panelon a forrasztás mellett átvágod a fóliát és könnyedén sorba köthető a két fél tekercs, remélem nem csal a szemem.
Ha itt csinálod, és nem jön össze, akkor vissza is kötheted ahogy volt eredetileg.
De tévedhetek is, mert a másik oldalát nem látom.
Ha itt csinálod, és nem jön össze, akkor vissza is kötheted ahogy volt eredetileg.
De tévedhetek is, mert a másik oldalát nem látom.
Cím: Re:Léptetőmotor
Írta: Nagy Zoli Dátum 2020 január 20, 21:22
Írta: Nagy Zoli Dátum 2020 január 20, 21:22
Minden témát nem olvasok... A Smart Stepper egyébként szerintem amúgy is kevés ezeknek a meghajtásához. Most visszaolvastam amit Te irtál, hogy pontos legyek azt irtad nincsen egy konkrét beállása két pozició között kézzel eltekerhető, Toschiba és Leadshine vezérlővel próbáltad.
Azt irod gond van velük... valótlant ne állits! a motorok a gyári speckóknak megfelelően biztos hogy tökéletesek! hogy esetleg adott feladatra nem alkalmas azt akár el tudom fogadni mivel nincs adatlap róluk, ezért is nem állitottam sosem semmiféle valótlan adatot róluk! (mérések jöhetnek fel ide nyugodtan, hátha tanulunk valamit)
A tekercsek induktivitása ~200uH a gyári elrendezésben, most gyorsan átkötöttem sorosra, igy ~520uH lett. (kézi multiméterrel mérve, az mérés igy kezelendő... )
Egyébként azt irtad egész lépésre van tervezve, de akkor miért nem tökéles egész lépéssel sem? Egyébként egy fórumtárs mondta, hogy ő terhelés nélkül nem próbálta, de terheléssel menni normálisan megy, csak tartás közben hangoskodik 860as vezérlővel.
Teszek fel mindjárt képet az átkötött motorról, de előtte megpróbálom egy DM556-ról viszont én csak terheletlenül fogom tudni 36V-ról.
Azt irod gond van velük... valótlant ne állits! a motorok a gyári speckóknak megfelelően biztos hogy tökéletesek! hogy esetleg adott feladatra nem alkalmas azt akár el tudom fogadni mivel nincs adatlap róluk, ezért is nem állitottam sosem semmiféle valótlan adatot róluk! (mérések jöhetnek fel ide nyugodtan, hátha tanulunk valamit)
A tekercsek induktivitása ~200uH a gyári elrendezésben, most gyorsan átkötöttem sorosra, igy ~520uH lett. (kézi multiméterrel mérve, az mérés igy kezelendő... )
Egyébként azt irtad egész lépésre van tervezve, de akkor miért nem tökéles egész lépéssel sem? Egyébként egy fórumtárs mondta, hogy ő terhelés nélkül nem próbálta, de terheléssel menni normálisan megy, csak tartás közben hangoskodik 860as vezérlővel.
Teszek fel mindjárt képet az átkötött motorról, de előtte megpróbálom egy DM556-ról viszont én csak terheletlenül fogom tudni 36V-ról.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2020 január 20, 21:51
Írta: 000000000 Dátum 2020 január 20, 21:51
Egyelőre te állítottál valótlant, nem én, hiszen kiderült, a senki az valaki.
"a motorok a gyári speckóknak megfelelően biztos hogy tökéletesek! hogy esetleg adott feladatra nem alkalmas azt akár el tudom fogadni mivel nincs adatlap róluk"
Ezek meg megint milyen mondatok? Ha nincs adatlap, akkor milyen gyári speckóról beszélsz?
Nyilván azért nem található ezekről a motorokról semmilyen adatlap, mert ahogyan írtam célgépre tervezték, nem pedig általános CNC felhasználásra. Ezt a katasztrófális mérési eredmények is bizonyítják. Pont.
"a motorok a gyári speckóknak megfelelően biztos hogy tökéletesek! hogy esetleg adott feladatra nem alkalmas azt akár el tudom fogadni mivel nincs adatlap róluk"
Ezek meg megint milyen mondatok? Ha nincs adatlap, akkor milyen gyári speckóról beszélsz?
Nyilván azért nem található ezekről a motorokról semmilyen adatlap, mert ahogyan írtam célgépre tervezték, nem pedig általános CNC felhasználásra. Ezt a katasztrófális mérési eredmények is bizonyítják. Pont.
Cím: Re:Léptetőmotor
Írta: Nagy Zoli Dátum 2020 január 20, 22:40
Írta: Nagy Zoli Dátum 2020 január 20, 22:40
Ami a mondanivalóm lényege a motoroknak semmi baja! ne ragozzuk ezt, hogy hogyan értelmezed a mondatomat. Nincs adatlap, nem állítottam hogy x Nm vagy y V akármi adatokkal bír a motor, de állítottam és állítom, hogy a motorok a gyárból kikerült adataival bírnak most is, nincsen semmi károsodásuk. Ezt a részét befejeztem! (technikai adat, mérési eredmény jöhet, de ezt a hülyeséget hagyjuk h nem jó, max Neked nem jó, vagy max egy adott feladatra nem jó, nem pedig általánosságban nem jó, a Ferrari sem jó ha egy folyón kell átkelni)
Képet tettem fel a sorosra átkötött motorról, illetve videot a működésről :)
https://drive.google.com/open?id=1RxtTlyFtlRf_hYQwcy3YGBma56yqpFur
A konfiguráció:
- motor sorosra átkötve (elvileg így 0,5mH lett 0,2mH-ről a tekercsinduktivitás)
- DM556(kínai koppincs) vezérlő a maximális áramra 5,6A-re beállítva , tartóáram a névleges 50%a
- 36V DC tápfesz kapcsolótápról
- 3 fajta beállítás a 3 videon 6400step/rev, 3200step/rev , 400 step/rev
- terhelés nincs a motoron
A 400 az elvileg 1/2 mikrolépés, ott már lépést veszít mert nagyon pörögni akar, a mach3ba emlékeim szerint 7200mm/min van megadva. Nincs kattogás, tartóáramon kézzel stabilnak tűnik a tengely és a motor nem is zenél.
Ebből Nekem az következik, hogy a meghajtás nem volt megfelelő, hogy kezelje ezt az alacsony induktivitást megfelelően. Az elméletem a problémára az, hogy a kis induktivitás nagy áramcsúcsokat eredményez ezért a pwm szabályzásának frekvenciája hallatszik a motorból. A lépegetés meg esetleg a "be-be" kapcsoló áramkorlátból adódhat, ami a tiltási szintet átlagban esetleg nem éri el, de arra elég hogy rendellenesen viselkedjen.
(https://hobbicncforum.hu/uploaded_images/2020/01/tn_0eq4gqa8k9yemej0tdhn3_3668.jpg) (https://hobbicncforum.hu/uploaded_images/2020/01/0eq4gqa8k9yemej0tdhn3_3668.jpg)
Képet tettem fel a sorosra átkötött motorról, illetve videot a működésről :)
https://drive.google.com/open?id=1RxtTlyFtlRf_hYQwcy3YGBma56yqpFur
A konfiguráció:
- motor sorosra átkötve (elvileg így 0,5mH lett 0,2mH-ről a tekercsinduktivitás)
- DM556(kínai koppincs) vezérlő a maximális áramra 5,6A-re beállítva , tartóáram a névleges 50%a
- 36V DC tápfesz kapcsolótápról
- 3 fajta beállítás a 3 videon 6400step/rev, 3200step/rev , 400 step/rev
- terhelés nincs a motoron
A 400 az elvileg 1/2 mikrolépés, ott már lépést veszít mert nagyon pörögni akar, a mach3ba emlékeim szerint 7200mm/min van megadva. Nincs kattogás, tartóáramon kézzel stabilnak tűnik a tengely és a motor nem is zenél.
Ebből Nekem az következik, hogy a meghajtás nem volt megfelelő, hogy kezelje ezt az alacsony induktivitást megfelelően. Az elméletem a problémára az, hogy a kis induktivitás nagy áramcsúcsokat eredményez ezért a pwm szabályzásának frekvenciája hallatszik a motorból. A lépegetés meg esetleg a "be-be" kapcsoló áramkorlátból adódhat, ami a tiltási szintet átlagban esetleg nem éri el, de arra elég hogy rendellenesen viselkedjen.
(https://hobbicncforum.hu/uploaded_images/2020/01/tn_0eq4gqa8k9yemej0tdhn3_3668.jpg) (https://hobbicncforum.hu/uploaded_images/2020/01/0eq4gqa8k9yemej0tdhn3_3668.jpg)
Cím: Re:Léptetőmotor
Írta: Nagy Zoli Dátum 2020 január 20, 22:47
Írta: Nagy Zoli Dátum 2020 január 20, 22:47
Köszi ez hasznos infót ezt eddig én nem tudtam. De jó hír, hogy akkor egy átkötéshez szükséges "kupak" levétel valószínűleg nem károsítja ha jól értem.
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2020 január 20, 22:59
Írta: B.Zoltán Dátum 2020 január 20, 22:59
Most, hogy leforrasztottad a panelt láttad a kivezetéseket.
A panel leforrasztása nélkül is lerajzolhatnád a soros átkötést akinek kedve lesz rá, úgy azért egyszerűbb lenne, panel átvágás+vezeték.
A panel leforrasztása nélkül is lerajzolhatnád a soros átkötést akinek kedve lesz rá, úgy azért egyszerűbb lenne, panel átvágás+vezeték.
Cím: Re:Léptetőmotor
Írta: Nagy Zoli Dátum 2020 január 20, 23:12
Írta: Nagy Zoli Dátum 2020 január 20, 23:12
Lerajzolom de nem vagyok benne biztos h leszerelés nélkül átköthető, mert az úgy emlékszem kétoldalas panel és szerintem alul is kellene akkor vágni. De ahogy időm engedi rajzolok
Cím: Re:Léptetőmotor
Írta: Victorious Dátum 2020 január 21, 01:00
Írta: Victorious Dátum 2020 január 21, 01:00
Én a magam részéről köszönöm a tesztedet!!!
... és köszi mindenkinek a hasznos tanácsokat (elsősorban a sorbakötőset)!
A videók számomra magukért beszélnek (mert ha kell csendben van, ha kell forog szépen, egyenletesen) bár én nem vagyok mérnök, csak azt látom a videón, hogy így terheletlenül gond nélkül működik, ráadásul mikrolépés módokban.
Ha ezt a motort eredetileg 24V-os rendszerbe építették X árammal, akkor 48V-ra kapcsolt vezérlőnél a sorba kötés X áram felét, így a vezérlőn folyó eredeti áram felét jelentené, azonos teljesítmény mellett? Vagy rosszul gondolom?
Magyarul vajon így is kihozható belőle az eredeti nyomaték?
... és köszi mindenkinek a hasznos tanácsokat (elsősorban a sorbakötőset)!
A videók számomra magukért beszélnek (mert ha kell csendben van, ha kell forog szépen, egyenletesen) bár én nem vagyok mérnök, csak azt látom a videón, hogy így terheletlenül gond nélkül működik, ráadásul mikrolépés módokban.
Ha ezt a motort eredetileg 24V-os rendszerbe építették X árammal, akkor 48V-ra kapcsolt vezérlőnél a sorba kötés X áram felét, így a vezérlőn folyó eredeti áram felét jelentené, azonos teljesítmény mellett? Vagy rosszul gondolom?
Magyarul vajon így is kihozható belőle az eredeti nyomaték?
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2020 január 21, 06:33
Írta: 000000000 Dátum 2020 január 21, 06:33
"a motoroknak semmi baja!"[#nyes][#csodalk]
Mások panasza alapján én adtam erről a A23KMC050CN02CA típusszámú léptető motorról egy szakvéleményt, komoly motordinamikai mérési tesztjeim alapján is. Ezekre építve igen kicsi a valószínűsége annak, hogy tévedek, mivel a műszaki tény közlés a fórumos létemnek a lényege, amikből aki akar, még tanulni is tud. Egyszer majd te is belátod, hogy ez egy eléggé "furcsa" motor, és akkor még nagyon finoman fogalmaztam. Addig meg jobb lenne, ha nem írkálnál valótlanságokat velem kapcsolatban is.
Van itt még egy fontos dolog. Törekeszem arra, hogy csak olyan támában írjak, amihez értek is! Ezt javasolnám másoknak és neked is! Ha ezt ugyanis betartaná mindenki itt a fórumon, nem lenne itt ennyi fölösleges ötletelés, butaság, dezinformáció, meddő vita, ami aztán gyakran sehova nem vezető személyeskedésbe fullad.[#ejnye1]
Mások panasza alapján én adtam erről a A23KMC050CN02CA típusszámú léptető motorról egy szakvéleményt, komoly motordinamikai mérési tesztjeim alapján is. Ezekre építve igen kicsi a valószínűsége annak, hogy tévedek, mivel a műszaki tény közlés a fórumos létemnek a lényege, amikből aki akar, még tanulni is tud. Egyszer majd te is belátod, hogy ez egy eléggé "furcsa" motor, és akkor még nagyon finoman fogalmaztam. Addig meg jobb lenne, ha nem írkálnál valótlanságokat velem kapcsolatban is.
Van itt még egy fontos dolog. Törekeszem arra, hogy csak olyan támában írjak, amihez értek is! Ezt javasolnám másoknak és neked is! Ha ezt ugyanis betartaná mindenki itt a fórumon, nem lenne itt ennyi fölösleges ötletelés, butaság, dezinformáció, meddő vita, ami aztán gyakran sehova nem vezető személyeskedésbe fullad.[#ejnye1]
Cím: Re:Léptetőmotor
Írta: Nagy Zoli Dátum 2020 január 21, 07:23
Írta: Nagy Zoli Dátum 2020 január 21, 07:23
Nem megyek személyeskedésbe ezért is mondtam, hogy ne állítsd hogy a motor nem jó, közöld a mérési eredményeid, nem fogok megsértődni ha ahogy említetted elkeserítő, mert nem támasztottam vele szemben követelményt, lévén nincs műszaki adatom róla.
A 34-re is most kiderült, hogy nem a motor a ludas. Amint lesz időm megpróbálom én is a 23-ast is.
Ez az általad említett rendszer pontosan mit tud mérni a motorról? Tényleg tehetnél fel képet az eredményről és a mérési összeállításról is.
A 34-re is most kiderült, hogy nem a motor a ludas. Amint lesz időm megpróbálom én is a 23-ast is.
Ez az általad említett rendszer pontosan mit tud mérni a motorról? Tényleg tehetnél fel képet az eredményről és a mérési összeállításról is.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2020 január 21, 09:06
Írta: 000000000 Dátum 2020 január 21, 09:06
"Ez az általad említett rendszer pontosan mit tud mérni a motorról?"
Írtam már ezekről a motor dinamikai mérésekről. Olvass visszza innentől: [#t168p6255#]
Ahogy időm engedi (most rohanásban vagyok), majd a motorod eredményét is felteszem.
Írtam már ezekről a motor dinamikai mérésekről. Olvass visszza innentől: [#t168p6255#]
Ahogy időm engedi (most rohanásban vagyok), majd a motorod eredményét is felteszem.
Cím: Re:Léptetőmotor
Írta: Nagy Zoli Dátum 2020 január 21, 09:40
Írta: Nagy Zoli Dátum 2020 január 21, 09:40
Illetve esetleg egy olyan motorét is amit jónak tartasz (de szintén léptető)
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2020 január 21, 14:22
Írta: B.Zoltán Dátum 2020 január 21, 14:22
Szerintem, ha kétoldalas is érdemes visrosszakni a panelt, vagy ott helyben átfúrni ott, ahol meg kell szakítani a vezetősávot.
Mondjuk úgy, hogy ne fúrjon bele a tekercsbe az ember.
Én tegnap kötöttem párhuzamosra egy Nema 23-as motort, 1,2 ohm 4A és 5mH lett, most már használható.
Itt nem volt panel a vezetékeknek, de kín szenvedés volt átkötni, úgy hogy fogok csinálni panelt hozzá.
Engemet nem érint a Te motorod, csak tanácsként írtam, végülis mindenki úgy csinálja ahogy egyszerűbb neki.
Mondjuk úgy, hogy ne fúrjon bele a tekercsbe az ember.
Én tegnap kötöttem párhuzamosra egy Nema 23-as motort, 1,2 ohm 4A és 5mH lett, most már használható.
Itt nem volt panel a vezetékeknek, de kín szenvedés volt átkötni, úgy hogy fogok csinálni panelt hozzá.
Engemet nem érint a Te motorod, csak tanácsként írtam, végülis mindenki úgy csinálja ahogy egyszerűbb neki.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2020 január 21, 14:30
Írta: 000000000 Dátum 2020 január 21, 14:30
"Amint lesz időm megpróbálom én is a 23-ast is."
Ezt a kézi tesztet próbáljátok ki:
A motor sárga-piros madzagra 0.3 - 0.4 A DC áramot adjatok (labortáp híján akár egy 4.5 V-os laposelem is jó ide 10-14 Ohm ellenállással sorba kötve), a másik tekercs szabadon marad. Ezután tekergessétek finoman kézzel a motorengelyt jobbra-balra.
Éreztek valami furcsát ennél a motornál? Jöhetnek a tanulságos élménybeszámolók.[#conf]
Ezt a kézi tesztet próbáljátok ki:
A motor sárga-piros madzagra 0.3 - 0.4 A DC áramot adjatok (labortáp híján akár egy 4.5 V-os laposelem is jó ide 10-14 Ohm ellenállással sorba kötve), a másik tekercs szabadon marad. Ezután tekergessétek finoman kézzel a motorengelyt jobbra-balra.
Éreztek valami furcsát ennél a motornál? Jöhetnek a tanulságos élménybeszámolók.[#conf]
Cím: Re:Léptetőmotor
Írta: Victorious Dátum 2020 január 21, 15:03
Írta: Victorious Dátum 2020 január 21, 15:03
Ez akkor egy teljesen "bevett" működő dolog léptetőknél, hogy átkössük őket?
Milyen + - mellékhatásai tudnak lenni ennek a megoldásnak?
Milyen + - mellékhatásai tudnak lenni ennek a megoldásnak?
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2020 január 21, 15:31
Írta: B.Zoltán Dátum 2020 január 21, 15:31
Nem valószínű, hogy ez gyakori dolog, eddig még nem találkoztam vele.
Tegnapig úgy gondoltam, hogy ez csak az én elfajzott ötletem.
A 6 kivezetéses motoroknál bevált megoldás a párhuzamosra kötés, az azonos pólus két szál huzallal tekercselt tekercseknél, de itt a 4 pólus sorosan marad.
Nálam 8,6 ohm 1A 20mH volt eredetileg, most sokkal simábban, és nagyobb fordulattal érőssebben megy.
A nyomatékát még nem mérten ki, hogy mennyit javult.
Az igazi megoldás az áttekercselés lenne, de ott ki kellene venni a forgórészt, ami kockázatos hogy mennyit veszít az erejéből.
A Te esetedbe szerencsésebb a soros kötés vissza állítása, mert gondolom nem akarsz ilyen nagy áramokkal dolgozni.
Tegnapig úgy gondoltam, hogy ez csak az én elfajzott ötletem.
A 6 kivezetéses motoroknál bevált megoldás a párhuzamosra kötés, az azonos pólus két szál huzallal tekercselt tekercseknél, de itt a 4 pólus sorosan marad.
Nálam 8,6 ohm 1A 20mH volt eredetileg, most sokkal simábban, és nagyobb fordulattal érőssebben megy.
A nyomatékát még nem mérten ki, hogy mennyit javult.
Az igazi megoldás az áttekercselés lenne, de ott ki kellene venni a forgórészt, ami kockázatos hogy mennyit veszít az erejéből.
A Te esetedbe szerencsésebb a soros kötés vissza állítása, mert gondolom nem akarsz ilyen nagy áramokkal dolgozni.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2020 január 21, 15:42
Írta: Szalai György Dátum 2020 január 21, 15:42
"de ott ki kellene venni a forgórészt, ami kockázatos hogy mennyit veszít az erejéből"
Ha egy vascsőbe tolod át a forgórészt, hogy ne szakadjon meg a mágneses erővonal kör, akkor esélyes, hogy semennyit.
Ha egy vascsőbe tolod át a forgórészt, hogy ne szakadjon meg a mágneses erővonal kör, akkor esélyes, hogy semennyit.
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2020 január 21, 15:51
Írta: B.Zoltán Dátum 2020 január 21, 15:51
Ebben reménykedem, de a megvalósításra még nem szántam rá magam.
Mindenképpen "csőbe fogom húzni".
Mindenképpen "csőbe fogom húzni".
Cím: Re:Léptetőmotor
Írta: Rabb Ferenc Dátum 2020 január 21, 18:12
Írta: Rabb Ferenc Dátum 2020 január 21, 18:12
Ha [#906@ANTAL GÁBOR]-nak nem sikerült, én nem kísérleteznék vele...
[#t168p6310#]
[#t168p6310#]
Cím: Re:Léptetőmotor
Írta: Nagy Zoli Dátum 2020 január 21, 18:27
Írta: Nagy Zoli Dátum 2020 január 21, 18:27
Kérlek írd le mit tapasztaltál Te ennél a mérésnél!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2020 január 21, 18:51
Írta: 000000000 Dátum 2020 január 21, 18:51
Hibás pozíció beállásokat.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2020 január 21, 19:03
Írta: ANTAL GÁBOR Dátum 2020 január 21, 19:03
A csőbehúzásról : Én a legoptimálisabb csövet esztergáltam . ( természetesen a falvastagság sem indifferens mert olyan vastag anyag kell hogy ne lépjen ki az erővonal ) De a probléma a tekercsfejekben rejlik ( nem lehet közelebb férkőzni ) .
Mint írtam a nevesebb gyártók( Pl Sonce Boz ) megemlítik a mágnes típusát az adatlapon .
Kíváncsi lennék hogy az Alnicot milyen szisztémával "ütik " be .
Azt tudom hogy Dévaványán a lemágneseződött Stroncium ferrit mágnesű Dc motorokat a saját armatúratekercsre adott áramütéssel újradelejezik
Mint írtam a nevesebb gyártók( Pl Sonce Boz ) megemlítik a mágnes típusát az adatlapon .
Kíváncsi lennék hogy az Alnicot milyen szisztémával "ütik " be .
Azt tudom hogy Dévaványán a lemágneseződött Stroncium ferrit mágnesű Dc motorokat a saját armatúratekercsre adott áramütéssel újradelejezik
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2020 január 21, 20:56
Írta: B.Zoltán Dátum 2020 január 21, 20:56
Milyen volt a cső falvastagsága?
Én gondoltam arra is, hogy az állórész pólusok közötti résbe benyúló csapokat is csinálnék, hogy ne szakadjon meg a mágnesestér olyan könnyen.
Én gondoltam arra is, hogy az állórész pólusok közötti résbe benyúló csapokat is csinálnék, hogy ne szakadjon meg a mágnesestér olyan könnyen.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2020 január 21, 21:40
Írta: svejk Dátum 2020 január 21, 21:40
Anno én is elszórakoztam pár napig ilyen mókával.
Egy már szétszedve hozzám került HybridStepper volt az áldozat és volt mellé egy jó is összehasonlításnak.
A saját tekercsével való felmágnesezés szinte semmi eredményt nem hozott.
Esztergáltam hozzá vascsövet, majd a két mágnes közti résznél rést martam ezen keresztül fűztem be a beütőtekercset.
A beütés érzésre sikerült elég jól, de a helyére való visszatoláskor mindig vesztett sokat az erejéből.
És igen az eredeti tekercsfejektől nem lehetett elég vastag ott a vascső, lehet telítődött.
A szétszerelt motor kb. 1:3-ra veszti a mágnesességét, nekem ezzel a barkács módszerrel kb. 70 %-osra sikerült visszaütni.
Időtöltésnek jó volt :)
A mai motorok szerintem már nem AlNiCo-val készülnek, ott talán nincs ilyen gond.
Egy már szétszedve hozzám került HybridStepper volt az áldozat és volt mellé egy jó is összehasonlításnak.
A saját tekercsével való felmágnesezés szinte semmi eredményt nem hozott.
Esztergáltam hozzá vascsövet, majd a két mágnes közti résznél rést martam ezen keresztül fűztem be a beütőtekercset.
A beütés érzésre sikerült elég jól, de a helyére való visszatoláskor mindig vesztett sokat az erejéből.
És igen az eredeti tekercsfejektől nem lehetett elég vastag ott a vascső, lehet telítődött.
A szétszerelt motor kb. 1:3-ra veszti a mágnesességét, nekem ezzel a barkács módszerrel kb. 70 %-osra sikerült visszaütni.
Időtöltésnek jó volt :)
A mai motorok szerintem már nem AlNiCo-val készülnek, ott talán nincs ilyen gond.
Cím: Re:Léptetőmotor
Írta: Victorious Dátum 2020 január 21, 21:44
Írta: Victorious Dátum 2020 január 21, 21:44
Én lerajzoltam.
Ha jól látom, és jól gondolom, akkor így kötötted be.
Továbbá találtam egy dokksit, ami talán azonos lehet ezzel a 34-es motorral.
https://www.astrosyn.com/wp-content/uploads/2015/10/MY34HY1-3-Technical-Datasheet.pdf
Vélemény? (Tök hülyeség, hogy azonos, ha a súlya, méretei, és a kinézete kb ugyanaz?)
(https://hobbicncforum.hu/uploaded_images/2020/01/tn_stacnuwcb0cygqbufphzf_6871.png) (https://hobbicncforum.hu/uploaded_images/2020/01/stacnuwcb0cygqbufphzf_6871.png)
Ha jól látom, és jól gondolom, akkor így kötötted be.
Továbbá találtam egy dokksit, ami talán azonos lehet ezzel a 34-es motorral.
https://www.astrosyn.com/wp-content/uploads/2015/10/MY34HY1-3-Technical-Datasheet.pdf
Vélemény? (Tök hülyeség, hogy azonos, ha a súlya, méretei, és a kinézete kb ugyanaz?)
(https://hobbicncforum.hu/uploaded_images/2020/01/tn_stacnuwcb0cygqbufphzf_6871.png) (https://hobbicncforum.hu/uploaded_images/2020/01/stacnuwcb0cygqbufphzf_6871.png)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2020 január 21, 21:46
Írta: svejk Dátum 2020 január 21, 21:46
Szerintem az is kevés lenne, de Gábor ki tudja számolni fejben milyen keresztmetszetnél telítődne, persze tudni kellene a szükséges B értékét is.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2020 január 21, 21:54
Írta: svejk Dátum 2020 január 21, 21:54
A kérdéses léptetőmotor tekintetében pedig a legbiztosabb a gyári meghajtással való kipróbálás lenne, mert ugye volt már itt is olyan a történelemben, hogy a legjobb szakik is elhamarkodottan nyilatkoztak egy-egy dologról.
Cím: Re:Léptetőmotor
Írta: Nagy Zoli Dátum 2020 január 21, 22:54
Írta: Nagy Zoli Dátum 2020 január 21, 22:54
Bocs, egy üzenetben válaszolok mindenkinek.
Victorious,
igen úgy kötöttem be pontosan ahogyan rajzoltad. Méretben kinézetben hasonlít, de teljesen nem ugyanez, jóval nagyobb fázisáramra tippelek, az induktivitása amit mértem 0,2mH volt alap kötésnél ennek az adatlapján 2mH, ennyit még a kézi műszer sem téved.
Robsy,
megcsináltam a mérést bár Nekem ez így jónak tűnik. 0,45A ment a tekercsre áramgenerátoros üzemmóddal egy labortápról, ezt rákapcsolva "megragad" a motor , ahogy próbálom eltekerni kissebb erővel akkor rezeg mintha ellentartana Nekem és vissza akarná tenni a pozícióba, nagyobb erővel eltekerhető de ilyenkor is beáll egy ilyen stabil nyugalmi pozícióba. Egy másik teljesen más motorral is megpróbáltam, a helyzet ugyanaz. (a kérdéses motort kézzel alig bírtam eltekerni mert nem volt rajta bordáskerék, csak a tengelybe egy kis csap és eléggé kényelmetlen volt a kezemnek abba kapaszkodni)
Csináltam egy ennél látványosabb mérést is, szintén DM556 vezérlővel:
- Áram 2.7A-re beállítva , nyugalmi 50%
- 1/16 ulepes
- többi ugyanaz mint a Nema34 esetében
Kézi multiméter nekem a szóban forgó motorra ~2,5mH tekercsinduktivitást mutatott, a másikra pedig 0.8mH-t.
A motor gyönyörűen pörög... megállításkor csendben van, nem kattog, nem zörög, semmi rendellenes. Jó lenne látni tőled is valami kézzelfoghatót, mert eddig csak "furcsa" , meg "nem jó" volt. Így most az egész mérőrendszer Nekem olyan mint Columbo felesége.
És persze videót is tettem fel róla ide:
https://drive.google.com/open?id=1RxtTlyFtlRf_hYQwcy3YGBma56yqpFur
Na most akkor? :) nem használtam fekete mágiát. Van még a telkemen pár egyszerű aktuátor amiket habvágókhoz építettem, jövőhéten elvileg megyek oda hazahozok egyet, felszerelem rá ezt a motort majd a végére egy mérőórát. Nekivezetem a mérőórának, majd elküldöm a másik végére. Újra vissza "0"ba és mérőóra leolvas. Ugyanezt kipróbálom majd úgy is hogy nem csak egy oda-vissza hanem esetleg útközbe egy-egy irányváltás ide-oda járkálás. Nem hiszem el h ez nem alkalmas CNC-re és pozíció gondjai vannak, most hogy saját magam is próbáltam pláne nem.
Victorious,
igen úgy kötöttem be pontosan ahogyan rajzoltad. Méretben kinézetben hasonlít, de teljesen nem ugyanez, jóval nagyobb fázisáramra tippelek, az induktivitása amit mértem 0,2mH volt alap kötésnél ennek az adatlapján 2mH, ennyit még a kézi műszer sem téved.
Robsy,
megcsináltam a mérést bár Nekem ez így jónak tűnik. 0,45A ment a tekercsre áramgenerátoros üzemmóddal egy labortápról, ezt rákapcsolva "megragad" a motor , ahogy próbálom eltekerni kissebb erővel akkor rezeg mintha ellentartana Nekem és vissza akarná tenni a pozícióba, nagyobb erővel eltekerhető de ilyenkor is beáll egy ilyen stabil nyugalmi pozícióba. Egy másik teljesen más motorral is megpróbáltam, a helyzet ugyanaz. (a kérdéses motort kézzel alig bírtam eltekerni mert nem volt rajta bordáskerék, csak a tengelybe egy kis csap és eléggé kényelmetlen volt a kezemnek abba kapaszkodni)
Csináltam egy ennél látványosabb mérést is, szintén DM556 vezérlővel:
- Áram 2.7A-re beállítva , nyugalmi 50%
- 1/16 ulepes
- többi ugyanaz mint a Nema34 esetében
Kézi multiméter nekem a szóban forgó motorra ~2,5mH tekercsinduktivitást mutatott, a másikra pedig 0.8mH-t.
A motor gyönyörűen pörög... megállításkor csendben van, nem kattog, nem zörög, semmi rendellenes. Jó lenne látni tőled is valami kézzelfoghatót, mert eddig csak "furcsa" , meg "nem jó" volt. Így most az egész mérőrendszer Nekem olyan mint Columbo felesége.
És persze videót is tettem fel róla ide:
https://drive.google.com/open?id=1RxtTlyFtlRf_hYQwcy3YGBma56yqpFur
Na most akkor? :) nem használtam fekete mágiát. Van még a telkemen pár egyszerű aktuátor amiket habvágókhoz építettem, jövőhéten elvileg megyek oda hazahozok egyet, felszerelem rá ezt a motort majd a végére egy mérőórát. Nekivezetem a mérőórának, majd elküldöm a másik végére. Újra vissza "0"ba és mérőóra leolvas. Ugyanezt kipróbálom majd úgy is hogy nem csak egy oda-vissza hanem esetleg útközbe egy-egy irányváltás ide-oda járkálás. Nem hiszem el h ez nem alkalmas CNC-re és pozíció gondjai vannak, most hogy saját magam is próbáltam pláne nem.
Cím: Re:Léptetőmotor
Írta: Nagy Zoli Dátum 2020 január 21, 23:15
Írta: Nagy Zoli Dátum 2020 január 21, 23:15
Találtam egy ilyet, ha nemis a konkrét motorról de a 23KM-C sorozatról
(https://hobbicncforum.hu/uploaded_images/2020/01/tn_hg8ghfn9m7u64as3cpbx_3668.png) (https://hobbicncforum.hu/uploaded_images/2020/01/hg8ghfn9m7u64as3cpbx_3668.png)
(https://hobbicncforum.hu/uploaded_images/2020/01/tn_hg8ghfn9m7u64as3cpbx_3668.png) (https://hobbicncforum.hu/uploaded_images/2020/01/hg8ghfn9m7u64as3cpbx_3668.png)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2020 január 22, 08:07
Írta: 000000000 Dátum 2020 január 22, 08:07
"az egész mérőrendszer Nekem olyan mint Columbo felesége.+
Nagy mesélő vagy, folyamatosan szeretsz mást mondani, mint a valóság. [#csodalk]
A tény az, hogy már 2017-ben a székesfehérvári Hobby CNC kiálításon látható volt a mérőrendszer, ott a helyszínen be is mértem vele pár fórumtárs motorját.
Aztán van egy szakmai honlapom, aminek az egyik fejezete csak a Robsy motor dinamikai mérésekrők szól, szerintem itt se jártál még. Itt a fórumon is számos publikációm van ebben a topikban is erről.
Aztán azt az elemi mérést se tudod normálisn érezni, megvalósítani, amit írtam. Az áram miért 0.45 A volt, amikor 0.3 - 0.4 közöttit javasoltam? Mellesleg hogy minél kisebb nyomatékkal tudjad kézzel kitéríteni a motor tengelyét, a kisebb áram értékek a jobbak ennél a tesztnél, tehát pl. 0.3 A-el ismételd meg.
Az is fontos alaptétel, hogy először egy léptetőmotort a +- 2 1/s fordulatszám tartományban érdemes tesztelni, kivizsgálni, mert a "hülyére" pörgett motor sokszor csak egy "látványpékség" a hobbysta videókon.
Hidd már el, nem a levegőbe beszélek, az a ritka szakemberke, megszállott vagyok, aki ~ 40 éve a CNC motorhajtások fejlesztésével, lelkivilágával is intenzíven, folyamatosan foglalkozik. Így amikről pedig írok, azok a kőkemény elvi alapokon megvalósuló gyakorlati tények, tapasztalatok, mérési eredmények, és nem valami misztikus duma, ahogy te is gondolod.
Nagy mesélő vagy, folyamatosan szeretsz mást mondani, mint a valóság. [#csodalk]
A tény az, hogy már 2017-ben a székesfehérvári Hobby CNC kiálításon látható volt a mérőrendszer, ott a helyszínen be is mértem vele pár fórumtárs motorját.
Aztán van egy szakmai honlapom, aminek az egyik fejezete csak a Robsy motor dinamikai mérésekrők szól, szerintem itt se jártál még. Itt a fórumon is számos publikációm van ebben a topikban is erről.
Aztán azt az elemi mérést se tudod normálisn érezni, megvalósítani, amit írtam. Az áram miért 0.45 A volt, amikor 0.3 - 0.4 közöttit javasoltam? Mellesleg hogy minél kisebb nyomatékkal tudjad kézzel kitéríteni a motor tengelyét, a kisebb áram értékek a jobbak ennél a tesztnél, tehát pl. 0.3 A-el ismételd meg.
Az is fontos alaptétel, hogy először egy léptetőmotort a +- 2 1/s fordulatszám tartományban érdemes tesztelni, kivizsgálni, mert a "hülyére" pörgett motor sokszor csak egy "látványpékség" a hobbysta videókon.
Hidd már el, nem a levegőbe beszélek, az a ritka szakemberke, megszállott vagyok, aki ~ 40 éve a CNC motorhajtások fejlesztésével, lelkivilágával is intenzíven, folyamatosan foglalkozik. Így amikről pedig írok, azok a kőkemény elvi alapokon megvalósuló gyakorlati tények, tapasztalatok, mérési eredmények, és nem valami misztikus duma, ahogy te is gondolod.
Cím: Re:Léptetőmotor
Írta: Nagy Zoli Dátum 2020 január 22, 08:32
Írta: Nagy Zoli Dátum 2020 január 22, 08:32
Félre ne érts én nem a szakmai hozzáértésedet kérdőjelezem meg ezt azért had szögezzem le!
Nem értem miért nem jó a 0,45A ha a 0,4 jó , ez kb 10% különbség. Ráadásul abban biztos vagyok, hogy nem lehet általánosan minden motorra kimondani, hogy 300mA a jó a próbához, más tulajdonságú motornak lehet elég 150mA vagy kell 500mA. (privát véleményem)
Kérdésem: ha normálisan motorvezérlőről meghajtva ahogy írtam egy aktuátoron referencia pozicióhoz mérve a kiadott és valóságos mozgást összevetve ha jó akkor még szerinted mindig nem könyvelhetjük el , hogy ez alkalmas CNC-re? Mert hogy CNC-ben is ugyanezt kell tudnia egy léptetőnek.
Illetve mint látod a SmartStepperes kolléga által írt hiba sincs. (nem csodálom az egy 3d nyomtatóhoz leginkább nema17hez való meghajtó)
Nem értem miért nem jó a 0,45A ha a 0,4 jó , ez kb 10% különbség. Ráadásul abban biztos vagyok, hogy nem lehet általánosan minden motorra kimondani, hogy 300mA a jó a próbához, más tulajdonságú motornak lehet elég 150mA vagy kell 500mA. (privát véleményem)
Kérdésem: ha normálisan motorvezérlőről meghajtva ahogy írtam egy aktuátoron referencia pozicióhoz mérve a kiadott és valóságos mozgást összevetve ha jó akkor még szerinted mindig nem könyvelhetjük el , hogy ez alkalmas CNC-re? Mert hogy CNC-ben is ugyanezt kell tudnia egy léptetőnek.
Illetve mint látod a SmartStepperes kolléga által írt hiba sincs. (nem csodálom az egy 3d nyomtatóhoz leginkább nema17hez való meghajtó)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2020 január 22, 08:50
Írta: 000000000 Dátum 2020 január 22, 08:50
Ennek a motornak már a tekergetése is olyan furcsa, amolyan "minebeás" érzés.
Tudod ez olyan, mint a görögdinnye vásárlás előtt a tenyérrel való kongatási teszt. Kellő tapasztalat, gyakorlat után van aki igen nagy valószínűséggel tud így számára jó minőségű dinnyét kiválasztani.
Leírtam világosan, miért jó ENNÉL a motornál a 0.3 A körüli teszt áram, olvasd el megint, és teszteld le így is.
Tudod ez olyan, mint a görögdinnye vásárlás előtt a tenyérrel való kongatási teszt. Kellő tapasztalat, gyakorlat után van aki igen nagy valószínűséggel tud így számára jó minőségű dinnyét kiválasztani.
Leírtam világosan, miért jó ENNÉL a motornál a 0.3 A körüli teszt áram, olvasd el megint, és teszteld le így is.
Cím: Re:Léptetőmotor
Írta: Nagy Zoli Dátum 2020 január 22, 09:00
Írta: Nagy Zoli Dátum 2020 január 22, 09:00
Kiváncsiságból már csak megcsinálom 300mA-el is. Ez a "minebea"-s ezt akkor úgy érted hogy a Minebea motorok nem jók?
Most visszaolvastam a SmartStepperes tapasztalatait, aki azt említi hogy darabosan jár de csak kis áramnál, nagyobb áramnál már jól jár menet közben csak zajos. Ezt teljes egészében én betudom a gyenge meghajtásnak, mivel nálam a 2,7A-re beállított vezérlőn normálisan jár. (na éppen ezért nem győzne meg még az sem ha 300mA-en bármit tapasztalnék, mert az nem korrekt meghajtás)
Az aktuátoros teszt kérdésemre is válaszolj légyszíves! Leginkább erre lennék kíváncsi
Most visszaolvastam a SmartStepperes tapasztalatait, aki azt említi hogy darabosan jár de csak kis áramnál, nagyobb áramnál már jól jár menet közben csak zajos. Ezt teljes egészében én betudom a gyenge meghajtásnak, mivel nálam a 2,7A-re beállított vezérlőn normálisan jár. (na éppen ezért nem győzne meg még az sem ha 300mA-en bármit tapasztalnék, mert az nem korrekt meghajtás)
Az aktuátoros teszt kérdésemre is válaszolj légyszíves! Leginkább erre lennék kíváncsi
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2020 január 22, 09:04
Írta: KBalázs Dátum 2020 január 22, 09:04
A SmartStepperes problémáról kiderült pár hsz-el később, hogy az opto-s bemenete elégtelenül lett meghajtva az Arduinoról.
Cím: Re:Léptetőmotor
Írta: Nagy Zoli Dátum 2020 január 22, 09:09
Írta: Nagy Zoli Dátum 2020 január 22, 09:09
Tovább olvasva a topicot, valami Pico Drive vezérlővel normálisan járt már a SmartStepperes kollégának is a motor.
https://www.youtube.com/watch?v=2IHCxHkufrU Ha jól látom ez a PicoDrive vagy TB6560 vagy 6600 alapú lehet. Én azt gyanítom ennek a motornak egyszerűen kell az áram...ennyi. High Torque motorról beszélgetünk elvégre, a sok lóerős autókat is etetni kell hogy menjenek :)
https://www.youtube.com/watch?v=2IHCxHkufrU Ha jól látom ez a PicoDrive vagy TB6560 vagy 6600 alapú lehet. Én azt gyanítom ennek a motornak egyszerűen kell az áram...ennyi. High Torque motorról beszélgetünk elvégre, a sok lóerős autókat is etetni kell hogy menjenek :)
Cím: Re:Léptetőmotor
Írta: Nagy Zoli Dátum 2020 január 22, 09:11
Írta: Nagy Zoli Dátum 2020 január 22, 09:11
Szóval én mindent összevetve azt gondolom meddő ez a vita tovább. Mindkét szóba került motor jól működik a megfelelő meghajtás mellett.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2020 január 22, 09:22
Írta: 000000000 Dátum 2020 január 22, 09:22
Ezredes mérőórával mérted az aktuátoros visszaállási pozíciót?
Egyébként a visszaállási pozíciója lehet még elfogadható egy motornál, miközben elfogadhatatlnok, hitványok a mozgás dinamikai függvény jellemzői (út, sebesség, gyorsulás).
Fontos tehát leszögezni, hogy óriási különbség van a statikus és dinamikus motorhajtás állapotok között.
Egyébként a visszaállási pozíciója lehet még elfogadható egy motornál, miközben elfogadhatatlnok, hitványok a mozgás dinamikai függvény jellemzői (út, sebesség, gyorsulás).
Fontos tehát leszögezni, hogy óriási különbség van a statikus és dinamikus motorhajtás állapotok között.
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2020 január 22, 09:53
Írta: B.Zoltán Dátum 2020 január 22, 09:53
Csak találgatok, mert nekem nincs ilyen motorom.
Egy bizonyos áramnál (0,3-0,4) kellemesen lehet érezni az előre-hátra mozgatásnál a mágneses rugalmasságot a következő pólusig, talán ezeket bontja mikrolépésekre.
Ezeknél a motoroknál nincs ez, vagy jóval kisebb?
Lehet rossz irányba tapogatózom?
Egy bizonyos áramnál (0,3-0,4) kellemesen lehet érezni az előre-hátra mozgatásnál a mágneses rugalmasságot a következő pólusig, talán ezeket bontja mikrolépésekre.
Ezeknél a motoroknál nincs ez, vagy jóval kisebb?
Lehet rossz irányba tapogatózom?
Cím: Re:Léptetőmotor
Írta: Nagy Zoli Dátum 2020 január 22, 10:09
Írta: Nagy Zoli Dátum 2020 január 22, 10:09
Még sehogy nem mértem, csak eszembe jutott, hogy ez releváns mérés lenne főleg h itt legtöbben CNC vagy hasonló dologra használják. Ezredes mérőórával is mérhetem, de azért ott már a mechanikának is jónak kellene lennie, viszont a habvágóhoz készült low-cost aktuátorom az nem az....
Na mindegy nem ragozom ezt tovább, a Nema34-es problémát sikerült elhárítani tehát vagy soros kötés vagy nagyon izmos vezérlő kell.
A Nema23 pedig akkor mindenkinek működik. Ezek szerint Neked is, csak hitványnak találod a dinamikai paramétereket. Nekem ehhez nincsen műszerezettségem, hogy cáfoljam vagy megerősítsem, illetve itt egy összehasonlító mérés pl egy klavios cnchez árult motorral többet elárulna. Aztán persze lehetne ár/érték arányt is nézni.
Na mindegy nem ragozom ezt tovább, a Nema34-es problémát sikerült elhárítani tehát vagy soros kötés vagy nagyon izmos vezérlő kell.
A Nema23 pedig akkor mindenkinek működik. Ezek szerint Neked is, csak hitványnak találod a dinamikai paramétereket. Nekem ehhez nincsen műszerezettségem, hogy cáfoljam vagy megerősítsem, illetve itt egy összehasonlító mérés pl egy klavios cnchez árult motorral többet elárulna. Aztán persze lehetne ár/érték arányt is nézni.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2020 január 22, 10:41
Írta: 000000000 Dátum 2020 január 22, 10:41
"Ezeknél a motoroknál nincs ez?"
De van, hiszen ettől nevezhető léptető motornak, hogy a poluspárok számának megfelelően beáll 7,2 fokonként.
Viszont a magy baj az ennél a motornál, hogy közben is beáll a "zavaros" mágnesese mező kontstrukciója miatt, ezért írtam a nyitó hozzászásomban, hogy ezt a motort alapvetően csak egész lépéses üzemmódra tervezhették célgépbe. [#t168p6299#]
Így teljesen jó irányba tapogatózol, gratulálok neked![#eljen]
De van, hiszen ettől nevezhető léptető motornak, hogy a poluspárok számának megfelelően beáll 7,2 fokonként.
Viszont a magy baj az ennél a motornál, hogy közben is beáll a "zavaros" mágnesese mező kontstrukciója miatt, ezért írtam a nyitó hozzászásomban, hogy ezt a motort alapvetően csak egész lépéses üzemmódra tervezhették célgépbe. [#t168p6299#]
Így teljesen jó irányba tapogatózol, gratulálok neked![#eljen]
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2020 január 23, 13:28
Írta: B.Zoltán Dátum 2020 január 23, 13:28
Léptetőmotor gyártás, mikor mágnesezik fel a forgórészt?
Mintha a srác a 1.18-nál, de hogyan?
Összerakva biztonságosabb, mert a hangszórókat is így csinálják, de itt...
Ilyen erős a mágnesestér, hogy pajzson keresztül is működik.
Mintha a srác a 1.18-nál, de hogyan?
Összerakva biztonságosabb, mert a hangszórókat is így csinálják, de itt...
Ilyen erős a mágnesestér, hogy pajzson keresztül is működik.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2020 január 23, 17:08
Írta: PSoft Dátum 2020 január 23, 17:08
Idéz...mikor mágnesezik fel a forgórészt?
Szerintem ezek a motorok a "büntetlenül szédszedhető" neodímium mágnessel szerelt hybrid motorok, nem utólag mágnesezik/üttetik őket.
0:31-nél látszanak a kék műanyag tárolódobozban a nikkel(?) bevonatú, fényes neodímium tárcsák.
A következő kockákon -a forgórész préselése után- is jól kivehetőek a fényes neodímium mágnesek.
Vannak ilyen motorjaim, régebben talán a boncolósban mutattam a szétszedett motorról képeket.
Ha jól emlékszem, akkor [#906@ANTAL GÁBOR] -nak is küldtem egy 23-ast tesztelésre.
De ha tévednék, úgy is kijavít valaki.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2020 január 23, 17:44
Írta: Szalai György Dátum 2020 január 23, 17:44
Nekem is ez volt az első ötletem, hogy előregyártott mágneskorongokkal dolgoznak már ezek.
A két fél lemeztest között kikukucskáló fényes karika is arra utalt, hogy NdFeB.
Azután megnéztem még pár mágnest, és a ferritet kivéve, a többi anyagúnak is fényes volt a széle.
Szóval a kinézete alapján nem tudtam megállapítani, hogy mi is az anyaga. Az AlNiCo is fényes, meg az SmCo is.
De miért gyártanának még AlNiCo-val motort?
Kommerszre már olcsóbb a NdFeB-al gyártás és nem is kell több száz fokon üzemelni.
A két fél lemeztest között kikukucskáló fényes karika is arra utalt, hogy NdFeB.
Azután megnéztem még pár mágnest, és a ferritet kivéve, a többi anyagúnak is fényes volt a széle.
Szóval a kinézete alapján nem tudtam megállapítani, hogy mi is az anyaga. Az AlNiCo is fényes, meg az SmCo is.
De miért gyártanának még AlNiCo-val motort?
Kommerszre már olcsóbb a NdFeB-al gyártás és nem is kell több száz fokon üzemelni.
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2020 január 23, 18:22
Írta: B.Zoltán Dátum 2020 január 23, 18:22
Azért ez nem biztos, hogy fel van mágnesezve, mert a hangszórógyártás is végig néztem, ott is közben mágnesezik fel, mert nem tudnák összerakni a dolgozók.
Itt is túl könnyedén teszi bele a hölgy a forgórész az állórészbe.
Aztán technikailag az összerakás, központosítás könnyebb, de tévedhetek.
Béla, nekem az volt gyanús, hogy az állórészek olyan össze-vissza vannak ott a rekeszbe, nem kellene azoknak jobban összeragadni?
Aztán a hölgy a 0.48-nál felszabályozza a forgórészt, mi lesz a köszörű által lecsiszolt vasreszelékkel?
Nem kellene beleragadni a pólusok közé?
Ilyen gondjaim vannak.
Itt is túl könnyedén teszi bele a hölgy a forgórész az állórészbe.
Aztán technikailag az összerakás, központosítás könnyebb, de tévedhetek.
Béla, nekem az volt gyanús, hogy az állórészek olyan össze-vissza vannak ott a rekeszbe, nem kellene azoknak jobban összeragadni?
Aztán a hölgy a 0.48-nál felszabályozza a forgórészt, mi lesz a köszörű által lecsiszolt vasreszelékkel?
Nem kellene beleragadni a pólusok közé?
Ilyen gondjaim vannak.
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2020 január 23, 20:30
Írta: B.Zoltán Dátum 2020 január 23, 20:30
Elnézést, most látom, hogy elírtam, 0:38-nál szabályozza a forgórészt.
Tanulságos videó, érdemes 1-13 részt megnézni.
5:40-nél látható egy Kapacitív nagyfeszültségű mágneses tápegység (Google fordítás kínaiból a képernyőről), mintha itt mágneseznék fel ezzel a berendezéssel a hangszóró mágnesét.
Tanulságos videó, érdemes 1-13 részt megnézni.
5:40-nél látható egy Kapacitív nagyfeszültségű mágneses tápegység (Google fordítás kínaiból a képernyőről), mintha itt mágneseznék fel ezzel a berendezéssel a hangszóró mágnesét.
Cím: Re:Léptetőmotor
Írta: SándorP Dátum 2020 január 23, 21:30
Írta: SándorP Dátum 2020 január 23, 21:30
Sziasztok!
Szeretném megköszönni mindenkinek a léptetőmotoros problémában nyújtott segítségét. Nálam a megoldást a tekercsek sorba kötése jelentette, külön köszönet érte Nagy Zolinak.
Mindenkinek további jó munkát és csevegést.
Üdv:Sándor
Szeretném megköszönni mindenkinek a léptetőmotoros problémában nyújtott segítségét. Nálam a megoldást a tekercsek sorba kötése jelentette, külön köszönet érte Nagy Zolinak.
Mindenkinek további jó munkát és csevegést.
Üdv:Sándor
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2020 január 24, 07:33
Írta: ANTAL GÁBOR Dátum 2020 január 24, 07:33
Az ALNICO védelmében : A mágnesezési görbét tanulmányozva mintegy 10 szer kisebb beütőimpulzussal beüthető mint a neodímium . Szerintem a léptecseket gyártó videóban éppen AlNiCo val szerelik a motorokat és valami trükkel a behelyezett forgórészt beütik
. Szerintem a Neodímiumosakat előre beütik és elhelyezik a forgórészben , majd egy spéci célgéppel ( pozícionálás ) helyezik be a helyére . Nem hinném hogy a helyi beütést meg lehetne valósítani mert iszonyat H -t kell létrehozni a neodímium esetében
. Szerintem a Neodímiumosakat előre beütik és elhelyezik a forgórészben , majd egy spéci célgéppel ( pozícionálás ) helyezik be a helyére . Nem hinném hogy a helyi beütést meg lehetne valósítani mert iszonyat H -t kell létrehozni a neodímium esetében
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2020 január 24, 10:13
Írta: svejk Dátum 2020 január 24, 10:13
Mi meg köszönjük, hogy visszajelezted a probléma megoldását!
Egyre ritkább ez a fórumon.
Egyre ritkább ez a fórumon.
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2020 január 24, 11:27
Írta: B.Zoltán Dátum 2020 január 24, 11:27
Ha nézted a 6355-ös hs videót, ott a hangszórót milyen egyszerűen összeszerelt állapotba felmágnesezik.
Gondolom naivan, hogy hasonló módszerrel, amikor a hölgy berakja a forgórész (1:16) az után felmágnesezhetik, az összerakott motor forgórészét.
Logikusan összerakás után történhet, különben vesződnének a mágneses alkatrészekkel.
Azért közel 2000Voltra töltött nagy kapacitású kondit rásütnek arra a tekercsre a hangszórónál.
A hangszóró mágnes az nem ALNICO ugye, vagy kitudja?
Gondolom naivan, hogy hasonló módszerrel, amikor a hölgy berakja a forgórész (1:16) az után felmágnesezhetik, az összerakott motor forgórészét.
Logikusan összerakás után történhet, különben vesződnének a mágneses alkatrészekkel.
Azért közel 2000Voltra töltött nagy kapacitású kondit rásütnek arra a tekercsre a hangszórónál.
A hangszóró mágnes az nem ALNICO ugye, vagy kitudja?
Cím: Re:Léptetőmotor
Írta: wsproBAGI Dátum 2020 január 24, 12:34
Írta: wsproBAGI Dátum 2020 január 24, 12:34
Azért nem semmi a célszerszám:
a szalag elején látszik, hogy a csajszi kezében egy kettétört csipesszel piszkálja a membrán közepét, majd a szalag végén a csipesz másik felét egy másik nő használja.
Takarékos, célravezető.
a szalag elején látszik, hogy a csajszi kezében egy kettétört csipesszel piszkálja a membrán közepét, majd a szalag végén a csipesz másik felét egy másik nő használja.
Takarékos, célravezető.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2020 január 24, 13:40
Írta: ANTAL GÁBOR Dátum 2020 január 24, 13:40
A hangszóró mágnes ( klasszikusan) Stroncium ferrit . Azt is igen könnyű beütni .
Magyarországon is volt mágnes gyártás a Kövac-ban . Jártam náluk anno és meg is mutatták az egész üzemet ( egy Miskolcon végzett kohómérnök volt az üzemvezető )
A felmágnesező gépek szerencsére megmenekültek a felszámolástól . Bors László ( Borsmagnet ) birtokolja az egyiket . Egy neodímim beütő pedig az Euromagnet birtokában ( Stellek Ernő ) van . Az azt hiszem a Fémipari Kutatóintézetből került oda
Korábban írtam hogy stroncium ferrittel szerelt ( hagyományos ) DC motorok mágneseit Dévaványán sikerrel újra mágnesezik
Magyarországon is volt mágnes gyártás a Kövac-ban . Jártam náluk anno és meg is mutatták az egész üzemet ( egy Miskolcon végzett kohómérnök volt az üzemvezető )
A felmágnesező gépek szerencsére megmenekültek a felszámolástól . Bors László ( Borsmagnet ) birtokolja az egyiket . Egy neodímim beütő pedig az Euromagnet birtokában ( Stellek Ernő ) van . Az azt hiszem a Fémipari Kutatóintézetből került oda
Korábban írtam hogy stroncium ferrittel szerelt ( hagyományos ) DC motorok mágneseit Dévaványán sikerrel újra mágnesezik
Cím: Re:Léptetőmotor
Írta: mazso1988 Dátum 2020 január 24, 13:52
Írta: mazso1988 Dátum 2020 január 24, 13:52
Sziasztok
Én is annyi észrevételt fűznék hozzá, hogy próbáltam Minebea 23KM-C050CN02CA (enkóderes motort) eredeti Leadshine ES-D808 vezérlővel.És nálam el sem tud indulni ez a fajta motor egyből pozíció követés hibával leáll a drive.
Ezután próbáltam csak a motort enkóder bekötése nélkül TB6560-as léptetőmotor vezérlővel azzal elindul a motor és megy is szépen 1/8-as mikrosteppel.
Csak valamiért zárt hurkú vezérlővel már nem mozdul meg.
Esetleg erre a problémára lenne valakinek tippje/ötlete?
Én is annyi észrevételt fűznék hozzá, hogy próbáltam Minebea 23KM-C050CN02CA (enkóderes motort) eredeti Leadshine ES-D808 vezérlővel.És nálam el sem tud indulni ez a fajta motor egyből pozíció követés hibával leáll a drive.
Ezután próbáltam csak a motort enkóder bekötése nélkül TB6560-as léptetőmotor vezérlővel azzal elindul a motor és megy is szépen 1/8-as mikrosteppel.
Csak valamiért zárt hurkú vezérlővel már nem mozdul meg.
Esetleg erre a problémára lenne valakinek tippje/ötlete?
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2020 január 24, 13:56
Írta: B.Zoltán Dátum 2020 január 24, 13:56
Jó furcsa, de egy akármivel is megigazíthatná a kivezetést, hogy ne akadjon bele a ragasztózógép orra.
Az első résztől nézz bele, ha van időd, azért megvan az szervezve rendesen.
Persze akad még javítani való, no de az a vinnyogás, amit a csaj csinál ott egész nap, már azért megérdemelnék a fizetést, persze ezzel mind a 100-200 dolgozót boldogítja.
Az első résztől nézz bele, ha van időd, azért megvan az szervezve rendesen.
Persze akad még javítani való, no de az a vinnyogás, amit a csaj csinál ott egész nap, már azért megérdemelnék a fizetést, persze ezzel mind a 100-200 dolgozót boldogítja.
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2020 január 24, 14:00
Írta: B.Zoltán Dátum 2020 január 24, 14:00
Gondoltam, hogy te tudod a típusát, jó tanulni mindig tőled.
Cím: Re:Léptetőmotor
Írta: Nagy Zoli Dátum 2020 január 24, 14:17
Írta: Nagy Zoli Dátum 2020 január 24, 14:17
Stimmel a felbontás?
Cím: Re:Léptetőmotor
Írta: mazso1988 Dátum 2020 január 24, 15:34
Írta: mazso1988 Dátum 2020 január 24, 15:34
Lehet nem teljesen mivel nem találtam róla adatlapot. De UCCNC-ben aux enkóder bemenetre rákötve ki tudtam számolni és azt az értéket írtam be a Drive-ba.
Esetleg neked lenne pontos adatod az enkóderrel kapcsolatban?
Esetleg neked lenne pontos adatod az enkóderrel kapcsolatban?
Cím: Re:Léptetőmotor
Írta: Nagy Zoli Dátum 2020 január 24, 16:16
Írta: Nagy Zoli Dátum 2020 január 24, 16:16
Nincsen sajnos szóval beírhatnád mit mértél :)
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2020 január 24, 16:20
Írta: Szalai György Dátum 2020 január 24, 16:20
2000V feszültségen 8500uF kapacitás már annyi energiát tárol amennyi a Gepárd M2 romboló torkolati energiája.
Cím: Re:Léptetőmotor
Írta: Victorious Dátum 2020 január 24, 18:26
Írta: Victorious Dátum 2020 január 24, 18:26
Sziasztok!
Ma nekem is lett időm alkalmazni az általatok ajánlottakat.
A sorba kötésre nekem is elindult a motor!
Az egészen finom lépések is szépen mennek, tehát úgy néz ki nem lesz itt gond a mikro lépéses üzemmóddal sem...
A működéshez még társul egy jó adag "zenélés", de legalább működik. :)
Köszönöm a segítőkészséget Nagy Zolinak, és mindenki másnak is!
Ma nekem is lett időm alkalmazni az általatok ajánlottakat.
A sorba kötésre nekem is elindult a motor!
Az egészen finom lépések is szépen mennek, tehát úgy néz ki nem lesz itt gond a mikro lépéses üzemmóddal sem...
A működéshez még társul egy jó adag "zenélés", de legalább működik. :)
Köszönöm a segítőkészséget Nagy Zolinak, és mindenki másnak is!
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2020 január 24, 18:33
Írta: 000000000 Dátum 2020 január 24, 18:33
Ezt az egyszerű tesztet végezd el. [#t168p6324#]
Írd meg mit tapasztaltál, az áram a tesztnél 0.3 A körül legyen inkább, akkor jobban érzed majd a problémát.
Írd meg mit tapasztaltál, az áram a tesztnél 0.3 A körül legyen inkább, akkor jobban érzed majd a problémát.
Cím: Re:Léptetőmotor
Írta: mazso1988 Dátum 2020 január 24, 19:13
Írta: mazso1988 Dátum 2020 január 24, 19:13
Nekem 1600-as felbontás jött ki, de mind mondottam lehet zagyvaság.
Cím: Re:Léptetőmotor
Írta: dezsoe Dátum 2020 január 24, 19:21
Írta: dezsoe Dátum 2020 január 24, 19:21
Én első körben elosztanám néggyel. Lásd: PPR és CPR közötti különbség.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2020 január 24, 19:36
Írta: svejk Dátum 2020 január 24, 19:36
Nem véletlen írtam a minap, az a 12 menet nagyon karcsúnak tűnt.
Cím: Re:Léptetőmotor
Írta: mazso1988 Dátum 2020 január 24, 20:08
Írta: mazso1988 Dátum 2020 január 24, 20:08
Ezért is mondtam, hogy nem vagyok biztos benne, hogy jó ez az érték akkor megpróbálom 400-al.
Cím: Re:Léptetőmotor
Írta: Victorious Dátum 2020 január 28, 12:36
Írta: Victorious Dátum 2020 január 28, 12:36
Sziasztok,
A képen látható USB-s illesztőt keresnék.
Nincs valakinek, ettől jobbra cserélés okán elfekvőben?
(https://hobbicncforum.hu/uploaded_images/2020/01/tn_csw373dq09et4si8y0mt_6871.jpg) (https://hobbicncforum.hu/uploaded_images/2020/01/csw373dq09et4si8y0mt_6871.jpg)
A képen látható USB-s illesztőt keresnék.
Nincs valakinek, ettől jobbra cserélés okán elfekvőben?
(https://hobbicncforum.hu/uploaded_images/2020/01/tn_csw373dq09et4si8y0mt_6871.jpg) (https://hobbicncforum.hu/uploaded_images/2020/01/csw373dq09et4si8y0mt_6871.jpg)
Cím: Re:Léptetőmotor
Írta: Victorious Dátum 2020 január 28, 17:44
Írta: Victorious Dátum 2020 január 28, 17:44
Tanácsot szeretnék kérni tőletek!
Hol találok szakirodalmat arról, hogy mit jelentenek az alábbi vezérlő kártya beállítások?
Current Loop Kp
Current Loop Ki
Position Loop Kp
Position Loop Ki
Position Loop Kd
Position Loop Kvff
Valaki azt mondta nekem erre a kérdésemre, hogy amit én keresek olvasnivalót, "az nem fehér embernek való".
Viszont engem ennek ellenére csak érdekelne :)
Jaaa ha véletlenül esetleg magyarul lenne aaz lenne csak az igazán nyerő, lévén hogy ezek szerint nem egyszerű a téma...
Előre is köszönöm!
Hol találok szakirodalmat arról, hogy mit jelentenek az alábbi vezérlő kártya beállítások?
Current Loop Kp
Current Loop Ki
Position Loop Kp
Position Loop Ki
Position Loop Kd
Position Loop Kvff
Valaki azt mondta nekem erre a kérdésemre, hogy amit én keresek olvasnivalót, "az nem fehér embernek való".
Viszont engem ennek ellenére csak érdekelne :)
Jaaa ha véletlenül esetleg magyarul lenne aaz lenne csak az igazán nyerő, lévén hogy ezek szerint nem egyszerű a téma...
Előre is köszönöm!
Cím: Re:Léptetőmotor
Írta: izbeki Dátum 2020 január 28, 18:01
Írta: izbeki Dátum 2020 január 28, 18:01
PID szabályzás (https://hu.wikipedia.org/wiki/PID_szab%C3%A1lyoz%C3%B3)
Cím: Re:Léptetőmotor
Írta: uph5fcryd Dátum 2020 január 30, 00:10
Írta: uph5fcryd Dátum 2020 január 30, 00:10
Jóestét, sziasztok!
Tudna valaki segíteni abban, hogy egy nyolc kivezetéses léptető motornál, hogyan határozzuk meg a tekercsek polaritását?(piros-sárga, zöld-barna, fekete-kék, és fehér-narancs)
Azt is megköszönöm, ha csak egy linket küldtök hol keressem.
A motoron semmi info nincs
Köszönettel:
navra
Tudna valaki segíteni abban, hogy egy nyolc kivezetéses léptető motornál, hogyan határozzuk meg a tekercsek polaritását?(piros-sárga, zöld-barna, fekete-kék, és fehér-narancs)
Azt is megköszönöm, ha csak egy linket küldtök hol keressem.
A motoron semmi info nincs
Köszönettel:
navra
Cím: Re:Léptetőmotor
Írta: uph5fcryd Dátum 2020 január 30, 00:16
Írta: uph5fcryd Dátum 2020 január 30, 00:16
Megint korán kérdeztem, megtaláltam...
Cím: Re:Léptetőmotor
Írta: gaben Dátum 2020 január 30, 09:05
Írta: gaben Dátum 2020 január 30, 09:05
Üdv,
léptetőmotor 8mm-es tengelyének hosszabbításra milyen megoldások léteznek?
köszi, Gábor
léptetőmotor 8mm-es tengelyének hosszabbításra milyen megoldások léteznek?
köszi, Gábor
Cím: Re:Léptetőmotor
Írta: designr Dátum 2020 január 30, 09:15
Írta: designr Dátum 2020 január 30, 09:15
Ha csak kicsivel nagyobb kinyúlás kell, akkor esztergálsz egy pontos tengelytoldót..8mm dörzsár..Ha egész hosszú, vagy nagy feszítő erő megy rá akkor a pajzshoz rögzithető csapágyazott támasztókonzol is kell..Ipari gépeknél nagyobb szélességű szijnál ez a korrekt megoldás..nem terheli úgy a csapágyat..
Cím: Re:Léptetőmotor
Írta: gaben Dátum 2020 január 30, 09:26
Írta: gaben Dátum 2020 január 30, 09:26
Szia Tibi,
nem kell túl hosszú, kb.: 30-50mm-ről beszélünk.
Valami ilyesmire gondoltam én is, esztergálok hozzá egy toldót, 1-1db hernyócsavarral a rögzítéshez.
köszi [#wave]
nem kell túl hosszú, kb.: 30-50mm-ről beszélünk.
Valami ilyesmire gondoltam én is, esztergálok hozzá egy toldót, 1-1db hernyócsavarral a rögzítéshez.
köszi [#wave]
Cím: Re:Léptetőmotor
Írta: Victorious Dátum 2020 február 11, 10:29
Írta: Victorious Dátum 2020 február 11, 10:29
Sziasztok,
A zárt hurkú léptetőmotor vezérlő, ha jól tudom azt jelenti, hogy folyamatos visszacsatolás érkezik pl. egy encoder-ről a vezérlőre, ami így követni tudja, hogy adott elmozdulás sikeresen megtörtént...
RS232-n keresztüli beállítás után Encoderrel ez hibátlanul működik ...
Kérdésem: (HBS860-as vezérlő) (beállítási paraméterek a csatolt képen láthatóak)
Van-e mód arra, hogy a zárt hurkú vezérlő, encoder visszacsatolás nélkül is mozgásra tudja bírni az adott motort?
Be lehet-e úgy állítani, (átmenetileg) hogy ne álljon le hibával, ha nem kap encoder jelet?
(tehát úgy viselkedjen mint az encoder bemenet nélküli nyílt hurkú kártyák)
Ha nem pontosak az ismereteim, elnézést! Tanulmányozni próbálom az eszközöket, és lehetőségeiket...
Köszönöm!
(https://hobbicncforum.hu/uploaded_images/2020/02/tn_3c6h4dc53646zbcd6wqbv_6871.png) (https://hobbicncforum.hu/uploaded_images/2020/02/3c6h4dc53646zbcd6wqbv_6871.png)
A zárt hurkú léptetőmotor vezérlő, ha jól tudom azt jelenti, hogy folyamatos visszacsatolás érkezik pl. egy encoder-ről a vezérlőre, ami így követni tudja, hogy adott elmozdulás sikeresen megtörtént...
RS232-n keresztüli beállítás után Encoderrel ez hibátlanul működik ...
Kérdésem: (HBS860-as vezérlő) (beállítási paraméterek a csatolt képen láthatóak)
Van-e mód arra, hogy a zárt hurkú vezérlő, encoder visszacsatolás nélkül is mozgásra tudja bírni az adott motort?
Be lehet-e úgy állítani, (átmenetileg) hogy ne álljon le hibával, ha nem kap encoder jelet?
(tehát úgy viselkedjen mint az encoder bemenet nélküli nyílt hurkú kártyák)
Ha nem pontosak az ismereteim, elnézést! Tanulmányozni próbálom az eszközöket, és lehetőségeiket...
Köszönöm!
(https://hobbicncforum.hu/uploaded_images/2020/02/tn_3c6h4dc53646zbcd6wqbv_6871.png) (https://hobbicncforum.hu/uploaded_images/2020/02/3c6h4dc53646zbcd6wqbv_6871.png)
Cím: Re:Léptetőmotor
Írta: mazso1988 Dátum 2020 február 11, 12:17
Írta: mazso1988 Dátum 2020 február 11, 12:17
Ez engem is érdekelne. Mert én is próbálok működésre bírni egy zárt láncú vezérlőt+ motort. De eddig még nem jártam sikerrel.
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2020 február 11, 14:39
Írta: TBS-TEAM Dátum 2020 február 11, 14:39
Zárthurku vezérlő.
Nem lehet kikapcsolni az encoder figyelését.
Nem lehet kikapcsolni az encoder figyelését.
Cím: Re:Léptetőmotor
Írta: angelero Dátum 2020 február 26, 15:08
Írta: angelero Dátum 2020 február 26, 15:08
Sziasztok!
Innen a fórumról vettem pár ilyen léptetőmotort, 3 fázisú.
Kérdésem az lenne, hogy milyen meghajtót ajánlanátok hozzá?
Köszönöm előre is!
(https://hobbicncforum.hu/uploaded_images/2020/02/tn_x6cf6uug8t5uj5gh9mhb_5105.jpg) (https://hobbicncforum.hu/uploaded_images/2020/02/x6cf6uug8t5uj5gh9mhb_5105.jpg)
Innen a fórumról vettem pár ilyen léptetőmotort, 3 fázisú.
Kérdésem az lenne, hogy milyen meghajtót ajánlanátok hozzá?
Köszönöm előre is!
(https://hobbicncforum.hu/uploaded_images/2020/02/tn_x6cf6uug8t5uj5gh9mhb_5105.jpg) (https://hobbicncforum.hu/uploaded_images/2020/02/x6cf6uug8t5uj5gh9mhb_5105.jpg)
Cím: Re:Léptetőmotor
Írta: Gyati Dátum 2020 február 26, 15:40
Írta: Gyati Dátum 2020 február 26, 15:40
Szia!
Ez talán jó lehet:
80-230VAC (https://variometrum.hu/elektronika-kategoria/leptetomotor-meghajto-kategoria/bipolaris_leptetomotor_meghajto_8a_230vac_2dm2280)
Itt nem tudod maximálisan kihasználni a tápot, de olcsóbb:
max 60VAC (https://variometrum.hu/elektronika-kategoria/leptetomotor-meghajto-kategoria/Leptetomotor_vezerlo_harom_fazisu_motorhoz_7_2A_3DM860A)
Ez talán jó lehet:
80-230VAC (https://variometrum.hu/elektronika-kategoria/leptetomotor-meghajto-kategoria/bipolaris_leptetomotor_meghajto_8a_230vac_2dm2280)
Itt nem tudod maximálisan kihasználni a tápot, de olcsóbb:
max 60VAC (https://variometrum.hu/elektronika-kategoria/leptetomotor-meghajto-kategoria/Leptetomotor_vezerlo_harom_fazisu_motorhoz_7_2A_3DM860A)
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2020 február 26, 16:21
Írta: B.Zoltán Dátum 2020 február 26, 16:21
Az első linkedre ezt írja, "bipoláris léptetőmotor vezérlő".
Cím: Re:Léptetőmotor
Írta: angelero Dátum 2020 február 26, 16:26
Írta: angelero Dátum 2020 február 26, 16:26
Az első linken lévő az 2 fázisú motorokhoz való szerintem :-)
A másodikat néztem már, azzal menne? A táp fesz. miatt sokat veszítenék nyomatékot vagy mi gond lehet vele?
A másodikat néztem már, azzal menne? A táp fesz. miatt sokat veszítenék nyomatékot vagy mi gond lehet vele?
Cím: Re:Léptetőmotor
Írta: Gyati Dátum 2020 február 26, 19:01
Írta: Gyati Dátum 2020 február 26, 19:01
Szia!
Igen jól látod, az elsőt elrontottam, bocsi.
Itt van a jó:
60-270VAC (https://variometrum.hu/elektronika-kategoria/leptetomotor-meghajto-kategoria/Leptetomotor_vezerlo_harom_fazisu_motorhoz_9_8A_230V_3M2270)
Igen jól látod, az elsőt elrontottam, bocsi.
Itt van a jó:
60-270VAC (https://variometrum.hu/elektronika-kategoria/leptetomotor-meghajto-kategoria/Leptetomotor_vezerlo_harom_fazisu_motorhoz_9_8A_230V_3M2270)
Cím: Re:Léptetőmotor
Írta: ki005gz70 Dátum 2020 március 08, 09:32
Írta: ki005gz70 Dátum 2020 március 08, 09:32
Sziasztok !
Olyan problémával találkoztatok már, hogy a msd 40.32 vezérlő, léptetőmotor, bordáskerék, bordásszíj évekig bevált megoldás, és akkor elkezdi a munkát, és 2-3 perc után nem hirtelen, hanem fokozatosan, de átmegy a motor mozgása remegőssé, a léptetés nem folyékony, hanem szakaszos. mintha menet közben kapcsolnánk át a 1/32 -ed miktolépést egészre. motorokat kicséreltem már, a vezérlőt is próbáltam másikkal, ugyan az, és nem értem a dolgot. ha menet közben, amikor már átmegy remegősbe a tengely, akkor ha kézzel megfokom a kocsit, és rántok rajta egyet, akkor elmúlik, majd megint kezdi, 2-3 perc, és már remeg az egész, a gravírozáson ez pedig ugye egyenletes ,függőleges csíkokban mutatkozik.
Olyan problémával találkoztatok már, hogy a msd 40.32 vezérlő, léptetőmotor, bordáskerék, bordásszíj évekig bevált megoldás, és akkor elkezdi a munkát, és 2-3 perc után nem hirtelen, hanem fokozatosan, de átmegy a motor mozgása remegőssé, a léptetés nem folyékony, hanem szakaszos. mintha menet közben kapcsolnánk át a 1/32 -ed miktolépést egészre. motorokat kicséreltem már, a vezérlőt is próbáltam másikkal, ugyan az, és nem értem a dolgot. ha menet közben, amikor már átmegy remegősbe a tengely, akkor ha kézzel megfokom a kocsit, és rántok rajta egyet, akkor elmúlik, majd megint kezdi, 2-3 perc, és már remeg az egész, a gravírozáson ez pedig ugye egyenletes ,függőleges csíkokban mutatkozik.
Cím: Re:Léptetőmotor
Írta: designr Dátum 2020 március 08, 09:38
Írta: designr Dátum 2020 március 08, 09:38
Mechanikát átnézném..sineket..kocsikat..Nincs-e valami szorulás..
Cím: Re:Léptetőmotor
Írta: designr Dátum 2020 március 08, 09:40
Írta: designr Dátum 2020 március 08, 09:40
Csapágyakat is nézd meg..túlfeszített bordásszíj okozhat idővel akadozást..
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2020 március 08, 10:44
Írta: TBS-TEAM Dátum 2020 március 08, 10:44
Motorkábelt cserélj
Cím: Re:Léptetőmotor
Írta: szf Dátum 2020 május 17, 10:31
Írta: szf Dátum 2020 május 17, 10:31
Az épülő berendezésemen van egy "Z" tengely jellegű mozgás. Kb 15kg-t kell emelgetni. Milyen méretű léptetőmotort válasszak hozzá? Tengely mozgási sebessége mint a hobby cnc maróké. Golyósorsó és THK sínek vannak benne. Orsó menetemelkedése 15mm.
Köszönöm, ha segítesz!
Köszönöm, ha segítesz!
Cím: Re:Léptetőmotor
Írta: s7manbs8 Dátum 2020 május 17, 12:26
Írta: s7manbs8 Dátum 2020 május 17, 12:26
Súrlódás nélkül, amikor mész felfele irányba, mikor is a nagyobb erő kell majd, akkor egyenletes mozgásnál szükséges teljesítmény:
Erő:
F=15kg*9.81m/s2 ~ 300 Newton
Sebesség hobbi módon kb.:
v=3000 mm/min = 50 mm/s =0.05m/s
Teljesítmény: P
P=F*v=300*0.05= 14 W
Mivel még gyorsulni is kell felfele, ezért 1G gyorsulásnál ennek duplája, illetve a súrlódások miattplusz valamennyi erő szükségeltetik ezért arra még a súrlódási erő * sebességet hozzáírod.
Egy combosabb NEMA23 biztos elviszi, vagy egy 50W-os DC szervó pl.
Erő:
F=15kg*9.81m/s2 ~ 300 Newton
Sebesség hobbi módon kb.:
v=3000 mm/min = 50 mm/s =0.05m/s
Teljesítmény: P
P=F*v=300*0.05= 14 W
Mivel még gyorsulni is kell felfele, ezért 1G gyorsulásnál ennek duplája, illetve a súrlódások miattplusz valamennyi erő szükségeltetik ezért arra még a súrlódási erő * sebességet hozzáírod.
Egy combosabb NEMA23 biztos elviszi, vagy egy 50W-os DC szervó pl.
Cím: Re:Léptetőmotor
Írta: wu8mduawj Dátum 2020 május 26, 23:56
Írta: wu8mduawj Dátum 2020 május 26, 23:56
Sziasztok!
Van egy plusz léptetőmotorom (KH56KM2-851), amelyet az asztali marógép magasság állítására szeretnék használni, de fogalmam sincs milyen vezérlő és egyebek kellenének a legegyszerűbb működéshez. Nincs semmi extra tervben, két gomb legyen hozzá az emeléshez és süllyesztéshez esetleg egy végállás kapcsoló. Segítségeteket köszönöm.
Van egy plusz léptetőmotorom (KH56KM2-851), amelyet az asztali marógép magasság állítására szeretnék használni, de fogalmam sincs milyen vezérlő és egyebek kellenének a legegyszerűbb működéshez. Nincs semmi extra tervben, két gomb legyen hozzá az emeléshez és süllyesztéshez esetleg egy végállás kapcsoló. Segítségeteket köszönöm.
Cím: Re:Léptetőmotor
Írta: GPeti1977 Dátum 2020 május 30, 19:54
Írta: GPeti1977 Dátum 2020 május 30, 19:54
Van egy ilyen karakterisztikájú léptetőmotor, a nyomaték görbén az y tengelyen a Nm nyomaték van, az x-en pedig pps. Akkor az most azt jelenti hogy beállítottam 600 as mikrolépést,és a step jelet 10kHz-re, ekkor a motor 1000f/percet forog. Ha jól értelmezem akkor ekkor lesz a nyomaték 8Nm és ha a mikrolépést leveszem 400 ra akkor pedig az 1500 as fordulatnál esik le a nyomaték 8Nm-re?
(https://hobbicncforum.hu/uploaded_images/2020/05/tn_d3bd30i449di8tz2gp853_5155.jpg) (https://hobbicncforum.hu/uploaded_images/2020/05/d3bd30i449di8tz2gp853_5155.jpg)
(https://hobbicncforum.hu/uploaded_images/2020/05/tn_d3bd30i449di8tz2gp853_5155.jpg) (https://hobbicncforum.hu/uploaded_images/2020/05/d3bd30i449di8tz2gp853_5155.jpg)
Cím: Re:Léptetőmotor
Írta: RJancsi Dátum 2020 május 31, 07:08
Írta: RJancsi Dátum 2020 május 31, 07:08
A legegyszerűbb, ha veszel egy léptető motor kontroll kártyát pl. ilyet, (https://www.ebay.com/itm/Motor-Pulse-Signal-Controller-Generator-Stepper-Motor-Driver-PWM-Speed-Regulator/322923303290?_trkparms=aid%3D1110012%26algo%3DSPLICE.SOIPOST%26ao%3D1%26asc%3D20200420083544%26meid%3D718b15bbbf0542e8ae7f2883d25aab40%26pid%3D100008%26rk%3D2%26rkt%3D12%26sd%3D323450554697%26itm%3D322923303290%26pmt%3D1%26noa%3D0%26pg%3D2047675%26algv%3DPromotedSellersOtherItemsV2&_trksid=p2047675.c100008.m2219) de rengeteg van a neten és hozzá egy motor meghajtót pl. egy DRV8825-öt. (https://www.ebay.com/itm/New-Stepper-Motor-Driver-Module-Board-DRV8825-for-3D-Printer-RepRap-StepStick/332507123801?epid=13029102728&hash=item4d6af81059:g:oMQAAOSwnVhaTJqp) Ezekhez már csak egy táp kell.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2020 május 31, 23:26
Írta: svejk Dátum 2020 május 31, 23:26
Az adataiddal 0,36 Nm forgatónyomaték kell az egyensúlyban tartáshoz.
De ugye vannak még súrlódások és gyorsítani is szeretnél.
A továbbiakhoz kellenének még a forgó egységekről adatok.
De ugye vannak még súrlódások és gyorsítani is szeretnél.
A továbbiakhoz kellenének még a forgó egységekről adatok.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2020 május 31, 23:40
Írta: svejk Dátum 2020 május 31, 23:40
Gyanús ez a grafikon...
A vízszintes tengelyen az egészlépés szokott lenni, alatt a fordulatszámot is fel szokták tüntetni.
No meg túl lapos is ez a karakterisztika egy léptetőmotohoz.
A vízszintes tengelyen az egészlépés szokott lenni, alatt a fordulatszámot is fel szokták tüntetni.
No meg túl lapos is ez a karakterisztika egy léptetőmotohoz.
Cím: Re:Léptetőmotor
Írta: GPeti1977 Dátum 2020 június 02, 13:57
Írta: GPeti1977 Dátum 2020 június 02, 13:57
Enkóderes léptető ami a forgatáskor számol is vele, ugyanis open loop módban 300 fordulat felett ugyanúgy megáll és remeg mint egy sima léptetőmotor, zárt hurkú módban viszont kipróbáltam 2-3000 f/perc-en is.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2020 június 02, 14:29
Írta: svejk Dátum 2020 június 02, 14:29
Én is kísérleteztem kínai encoderes 8 Nm-essel mechanikára felszerelve.
800 1/min-ig elég jól használható, afelett már rohamosan csökken a nyomaték.
Egy jénai Ecostep 2000-as valamivel jobb eredményt produkált, de azért ezek csak léptetőmotorok maradnak.
800 1/min-ig elég jól használható, afelett már rohamosan csökken a nyomaték.
Egy jénai Ecostep 2000-as valamivel jobb eredményt produkált, de azért ezek csak léptetőmotorok maradnak.
Cím: Re:Léptetőmotor
Írta: GPeti1977 Dátum 2020 június 02, 14:51
Írta: GPeti1977 Dátum 2020 június 02, 14:51
Igaz, egy ac szervóval biztos nem lehet versenyezni, de ahol nem kell nagy sebesség, gyorsulás, illetve egyszerűbb a beállítása, és még olcsóbb is, ilyen helyen megállhatja a helyét.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2020 június 02, 14:58
Írta: svejk Dátum 2020 június 02, 14:58
Ez kétségtelen!
Én is használni fogom.
Én is használni fogom.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2020 június 03, 12:40
Írta: svejk Dátum 2020 június 03, 12:40
No nézd csak!
Én egy hasonló összeállítást teszteltem (https://www.aliexpress.com/item/32681585709.html?spm=a2g0o.productlist.0.0.406315a33S7YrK&algo_pvid=d3993535-9e6b-46bc-84f3-5fea505c574e&algo_expid=d3993535-9e6b-46bc-84f3-5fea505c574e-1&btsid=0ab50f6115911803710634939e4b60&ws_ab_test=searchweb0_0,searchweb201602_,searchweb201603_)
Ezek a grafikonok kb. valóságosak, és egyértelműek a jelölések.
Én egy hasonló összeállítást teszteltem (https://www.aliexpress.com/item/32681585709.html?spm=a2g0o.productlist.0.0.406315a33S7YrK&algo_pvid=d3993535-9e6b-46bc-84f3-5fea505c574e&algo_expid=d3993535-9e6b-46bc-84f3-5fea505c574e-1&btsid=0ab50f6115911803710634939e4b60&ws_ab_test=searchweb0_0,searchweb201602_,searchweb201603_)
Ezek a grafikonok kb. valóságosak, és egyértelműek a jelölések.
Cím: Re:Léptetőmotor
Írta: phff55j06 Dátum 2020 június 19, 15:19
Írta: phff55j06 Dátum 2020 június 19, 15:19
Léptetőmotor mikrolépéses meghajtása hogyan befolyásolja a nyomatékot a fordulatszám függvényében? Nem tudtok valami leirást erröl?
Cím: Re:Léptetőmotor
Írta: dezs Dátum 2020 június 21, 02:05
Írta: dezs Dátum 2020 június 21, 02:05
Sziasztok,
Hosszútávú, stabil használatra milyen meghajtót javasoltok?
Sosem vettem még bolti léptető vezérlőt, de most sorozatgyártásra készítek elő egy nema17-es léptetőt tartalmazó berendezést, és a megbízhatóság, tartós beszerezhetőség a legfontosabb. Mondhatnám, hogy pénz nem számít, de nem lenne igaz. :)
MSDD-40-3.2 elég jó?
Hosszútávú, stabil használatra milyen meghajtót javasoltok?
Sosem vettem még bolti léptető vezérlőt, de most sorozatgyártásra készítek elő egy nema17-es léptetőt tartalmazó berendezést, és a megbízhatóság, tartós beszerezhetőség a legfontosabb. Mondhatnám, hogy pénz nem számít, de nem lenne igaz. :)
MSDD-40-3.2 elég jó?
Cím: Re:Léptetőmotor
Írta: csakyt Dátum 2020 június 21, 09:32
Írta: csakyt Dátum 2020 június 21, 09:32
Sziasztok. Szeretném a kis házi készítésű esztergámat léptető motoros vezérléssel megcsinálni. Mekkora léptető motor javasolt a keresztszánhoz és mekkora a vezérorsóhoz?
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2020 június 21, 10:14
Írta: D.Laci Dátum 2020 június 21, 10:14
A+B×X/Y=....Nm [#kacsint]
Kicsit konkrétabb paraméterek vannak?
Kicsit konkrétabb paraméterek vannak?
Cím: Re:Léptetőmotor
Írta: csakyt Dátum 2020 június 21, 10:48
Írta: csakyt Dátum 2020 június 21, 10:48
Az a baj, hogy mivel nem vagyok esztergályos, sem gépész, így a nyomatékokat nem tudom. Nem tudom, hogy ezt, miként kell kiszámolnom. nem ismerem azokat a számokat sem, hogy milyen erővel, (nyomatékkal) kell egy vasat, acélt megmunkálni. Kézzel még csak csak sikerült már nem egy két tárcsát, rudat megesztergálni ami elég pontos is lett, de a többiben teljesen tapasztalatlan vagyok. Hobbi szinten, unalom űzésként szoktam fabrikálni.
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2020 június 21, 11:59
Írta: Vetesi75 Dátum 2020 június 21, 11:59
Az én esztergámon 6Nm-esek vannak. A mozgatott tömegek elég jelentősek, az eredeti prizmáin fut, az orsó az golyós. 5mikron felbontással atombiztosan max. 3m/min gyorsjárat adódott (szerintem nem a mechanika, hanem a párhuzamos port jelenti a korlátot), ez 200mm/s2 gyorsulás mellett. Tartónyomatékok "felszorozva az áttétellel": 11KN ill. 4KN. Biztosan lehetne még finomítani rajta, de rohamtempóban lett beüzemelve és azóta sem volt időm vele ilyen téren foglalkozni. :(
Minden a helyi viszonyok függvénye lesz (elvárások és lehetőségek), számok csak a nagyságrend miatt...
Minden a helyi viszonyok függvénye lesz (elvárások és lehetőségek), számok csak a nagyságrend miatt...
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2020 június 21, 12:01
Írta: Vetesi75 Dátum 2020 június 21, 12:01
Az MSDD az egy jó cucc - leginkább a lépésvesztés detektálása miatt.
Cím: Re:Léptetőmotor
Írta: e90kiv90x Dátum 2020 augusztus 13, 23:50
Írta: e90kiv90x Dátum 2020 augusztus 13, 23:50
Sziasztok!
Önjáró fémdetektoros autót szeretnék építeni hobbiból.
https://www.youtube.com/watch?v=YH4s2xG1lx8
A videón látható fémdetektor kb 1.5kg tömegű. Hogy becsülnétek, így tippre milyen paraméterekkel rendelkező léptetőmotort ajánlanátok a videón látható feladat stabil ellátásához? és esetleg milyen vezérlő panelt, amit Raspberry Pi4-ről meg tudok hajtani?
Önjáró fémdetektoros autót szeretnék építeni hobbiból.
https://www.youtube.com/watch?v=YH4s2xG1lx8
A videón látható fémdetektor kb 1.5kg tömegű. Hogy becsülnétek, így tippre milyen paraméterekkel rendelkező léptetőmotort ajánlanátok a videón látható feladat stabil ellátásához? és esetleg milyen vezérlő panelt, amit Raspberry Pi4-ről meg tudok hajtani?
Cím: Re:Léptetőmotor
Írta: klaviokft Dátum 2020 augusztus 14, 06:53
Írta: klaviokft Dátum 2020 augusztus 14, 06:53
Sziasztok,
A Leadshine MSDD sorozat valóban egy megbízható vezérlő, több magyarországi gépgyártó is használja. Ebben nincs lépésvesztés figyelés. Ez a szolgáltatás csak az MSDE vagy az EM sorozatban van. Mindhárom vezérlőt lehet finomhangolni PC- ről. Bevált gyártó, már több mit 10 éve forgalmazzuk, 1% alatti meghibásodási rátával.
A Leadshine MSDD sorozat valóban egy megbízható vezérlő, több magyarországi gépgyártó is használja. Ebben nincs lépésvesztés figyelés. Ez a szolgáltatás csak az MSDE vagy az EM sorozatban van. Mindhárom vezérlőt lehet finomhangolni PC- ről. Bevált gyártó, már több mit 10 éve forgalmazzuk, 1% alatti meghibásodási rátával.
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2020 augusztus 14, 11:22
Írta: Vetesi75 Dátum 2020 augusztus 14, 11:22
Köszönöm a kiigazítást! Nekem valóban MSDE (EM806PbF) van, kevertem a kettőt.
Cím: Re:Léptetőmotor
Írta: prolight Dátum 2020 augusztus 25, 20:08
Írta: prolight Dátum 2020 augusztus 25, 20:08
Sziasztok.
Keresek Berger Lahr léptető motorhoz csatlakozót (2db/ motor) 2 motorhoz.
Ha van ötletetek azt szívesen venném.
Üdv.
Keresek Berger Lahr léptető motorhoz csatlakozót (2db/ motor) 2 motorhoz.
Ha van ötletetek azt szívesen venném.
Üdv.
Cím: Re:Léptetőmotor
Írta: 5yfyyj67 Dátum 2020 november 11, 21:19
Írta: 5yfyyj67 Dátum 2020 november 11, 21:19
Sziasztok,
Akad pár ilyen motorom.
17H19-0230 (https://www.google.com/url?sa=t&source=web&rct=j&url=https://www.raveo.cz/sites/default/files/download/2014/11/17H13.pdf&ved=2ahUKEwiXm4GqnfvsAhUQmYsKHRREBsAQFjAAegQIAhAB&usg=AOvVaw2qYIqLHikEYYdxYiv9W9_N&cshid=1605123322050)
Kihasznalhato lenne az encodere egy olcsobb kínai vezérlővel? Ha igen tudtok ajánlani?
Amiket találtam azok encoder bemente EA+/EA- és EB+/EB-, de a motoron van N+/N- is.
Pl
LCDA257S
Akad pár ilyen motorom.
17H19-0230 (https://www.google.com/url?sa=t&source=web&rct=j&url=https://www.raveo.cz/sites/default/files/download/2014/11/17H13.pdf&ved=2ahUKEwiXm4GqnfvsAhUQmYsKHRREBsAQFjAAegQIAhAB&usg=AOvVaw2qYIqLHikEYYdxYiv9W9_N&cshid=1605123322050)
Kihasznalhato lenne az encodere egy olcsobb kínai vezérlővel? Ha igen tudtok ajánlani?
Amiket találtam azok encoder bemente EA+/EA- és EB+/EB-, de a motoron van N+/N- is.
Pl
LCDA257S
Cím: Re:Léptetőmotor
Írta: sv93v0atm Dátum 2020 november 12, 12:51
Írta: sv93v0atm Dátum 2020 november 12, 12:51
Sziasztok!
Úgy alakult, hogy egy Berger Lahr VRDM3913/50LNBOO léptetőt, ami 3 fázisú, össze kéne házasítanom egy Leadshine MSDE-80-8.2 vezérlővel, ami 2 fázisú.
Úgy tudom ez lehetséges a motor tekercseinek átkötésével, de semmi használható infót nem találtam róla a neten.
A / lehetséges-e az átkötése és miként?
B / befolyásolja-e ez az üzembiztonságot?
C / teljes értékű 2 fázisú léptető lesz-e így vagy lesznek hátrányai?
Előre is köszi! bnqcs
Úgy alakult, hogy egy Berger Lahr VRDM3913/50LNBOO léptetőt, ami 3 fázisú, össze kéne házasítanom egy Leadshine MSDE-80-8.2 vezérlővel, ami 2 fázisú.
Úgy tudom ez lehetséges a motor tekercseinek átkötésével, de semmi használható infót nem találtam róla a neten.
A / lehetséges-e az átkötése és miként?
B / befolyásolja-e ez az üzembiztonságot?
C / teljes értékű 2 fázisú léptető lesz-e így vagy lesznek hátrányai?
Előre is köszi! bnqcs
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2020 november 12, 13:23
Írta: svejk Dátum 2020 november 12, 13:23
- nem kizárt, de ahhoz minden pólustekercs kivezetéséhez hozzá kellene férned.
- ha nem hajtod túl árammal nem ég le, tehát üzembiztos lenne
- egy kétfázisú eleve hátrányosabb mint a 3 fázisú
Szerintem nem éri meg a vesződséget, sem a motor sem a vezérlő nem pótolhatatlan vagy túl nagy érték.
- ha nem hajtod túl árammal nem ég le, tehát üzembiztos lenne
- egy kétfázisú eleve hátrányosabb mint a 3 fázisú
Szerintem nem éri meg a vesződséget, sem a motor sem a vezérlő nem pótolhatatlan vagy túl nagy érték.
Cím: Re:Léptetőmotor
Írta: sv93v0atm Dátum 2020 november 12, 15:13
Írta: sv93v0atm Dátum 2020 november 12, 15:13
Az első 2 pontot értem, köszönöm.
Milyen szempontból hátrányosabb a fázisú és mi az előnye a 3 fázisúnak?
köszi!
Milyen szempontból hátrányosabb a fázisú és mi az előnye a 3 fázisúnak?
köszi!
Cím: Re:Léptetőmotor
Írta: swghderh5 Dátum 2020 november 12, 16:55
Írta: swghderh5 Dátum 2020 november 12, 16:55
Sziasztok!
Lehet,hogy nem a legjobb helyen kérdezem.......
Van egy 22Nm-s léptető motorom. Milyen AC szervó motorral tudom helyettesíteni,ha ugyanakkora sőt még nagyobb erőt tudjak "kipaszírozni" belőle. Azt olvastam,hogy az AC szervó sokkal erősebb,mint a léptető motor..mi az "átváltás"(ha van ilyen)
Üdv Gyuri
Lehet,hogy nem a legjobb helyen kérdezem.......
Van egy 22Nm-s léptető motorom. Milyen AC szervó motorral tudom helyettesíteni,ha ugyanakkora sőt még nagyobb erőt tudjak "kipaszírozni" belőle. Azt olvastam,hogy az AC szervó sokkal erősebb,mint a léptető motor..mi az "átváltás"(ha van ilyen)
Üdv Gyuri
Cím: Re:Léptetőmotor
Írta: istvan3 Dátum 2020 november 12, 17:21
Írta: istvan3 Dátum 2020 november 12, 17:21
Mire szeretnéd használni?
Átalános szervóknál ~3,2Nm forgatónyomatékkal számolhatsz 1kw teljesítményenként 3000 RPM fordulaton.
A szervók pillanatnyilag tudják ennek a nyomatéknak 3-4x-ét.
Mivel a léptetőmotor nem képes 3000 RPM fordulatra, így a szervót áttételezheted. Egy 1,5kw-os motorral, 1:5 áttétellel 24,5 Nm nyomatékot tud leadni a kihajtó tengelyen 600 RPM kimeneti fordulaton. Pillanatnyilag pedig 80 Nm körül.
Átalános szervóknál ~3,2Nm forgatónyomatékkal számolhatsz 1kw teljesítményenként 3000 RPM fordulaton.
A szervók pillanatnyilag tudják ennek a nyomatéknak 3-4x-ét.
Mivel a léptetőmotor nem képes 3000 RPM fordulatra, így a szervót áttételezheted. Egy 1,5kw-os motorral, 1:5 áttétellel 24,5 Nm nyomatékot tud leadni a kihajtó tengelyen 600 RPM kimeneti fordulaton. Pillanatnyilag pedig 80 Nm körül.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2020 november 12, 17:52
Írta: svejk Dátum 2020 november 12, 17:52
A 3 fázisú egyenletesebb járás kevésbé eső nyomaték/fordulat görbe.
De biztos sok összehasonlítást találsz a neten.
De biztos sok összehasonlítást találsz a neten.
Cím: Re:Léptetőmotor
Írta: swghderh5 Dátum 2020 november 12, 18:03
Írta: swghderh5 Dátum 2020 november 12, 18:03
Köszi!
Nekem max. 300-500-s fordulat kell "nagy" nyomatékkal!
Természetesen áttétesre gondoltam csak az arányokkal nem vagyok tisztában (léptető kontra szervó)
Nekem max. 300-500-s fordulat kell "nagy" nyomatékkal!
Természetesen áttétesre gondoltam csak az arányokkal nem vagyok tisztában (léptető kontra szervó)
Cím: Re:Léptetőmotor
Írta: swghderh5 Dátum 2020 november 12, 18:05
Írta: swghderh5 Dátum 2020 november 12, 18:05
Ja és ez nem tudom mennyire fontos...elég rövid ciklusos időre kapcsol be a motor...1-3 másodpercre!!!!
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2020 november 18, 21:05
Írta: dtb Dátum 2020 november 18, 21:05
Sziasztok. Bénázok pár napja egy Lichuan closed loop vezérlővel. (LCDA257S) A kezdet az az volt, hogy a vezérlő, a hibajelző piros led sűrű villogásával kisérve folyamatosan letiltott. A hibakód kinyomozásához összekötöttem a vezérlő RJ11 (RS232) csatlakozóját a pc soros porttal, de az istennek nem jön létre a kommunikáció a vezérlő, és a hozzá tartozó program között.
A hardver hiba azóta már megoldódott, de ez a kábelezés nem hagy nyugodni. Letöltöttem a klavio és a Lichuan oldaláról is a programot, semmi. Cserélgettem az RX/TX lábakat, port sebességet, hardver beállításokat, ezek variációit... semmi.
Volt valakinek sikerélménye ebben a témakörben?
A hardver hiba azóta már megoldódott, de ez a kábelezés nem hagy nyugodni. Letöltöttem a klavio és a Lichuan oldaláról is a programot, semmi. Cserélgettem az RX/TX lábakat, port sebességet, hardver beállításokat, ezek variációit... semmi.
Volt valakinek sikerélménye ebben a témakörben?
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2020 november 18, 21:23
Írta: TBS-TEAM Dátum 2020 november 18, 21:23
Ez a kábel bekötése.
(https://hobbicncforum.hu/uploaded_images/2020/11/tn_38t30k04gnmccmv027mq_3344.png) (https://hobbicncforum.hu/uploaded_images/2020/11/38t30k04gnmccmv027mq_3344.png)
(https://hobbicncforum.hu/uploaded_images/2020/11/tn_38t30k04gnmccmv027mq_3344.png) (https://hobbicncforum.hu/uploaded_images/2020/11/38t30k04gnmccmv027mq_3344.png)
Cím: Re:Léptetőmotor
Írta: pbalazs Dátum 2020 november 18, 21:40
Írta: pbalazs Dátum 2020 november 18, 21:40
Feszültségszintek stimmelnek?
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2020 november 19, 06:24
Írta: dtb Dátum 2020 november 19, 06:24
Igen, ez alapján kötöttem be, de akármit csinálok, és akármit állítok be, csak annyit ír ki, hogy nem sikerült csatlakozni. Sima putty terminallal csatlakozva sincs semmi output. Két eltérő gyári program is elérhető, de egyiknél sincs csatlamozás. A leírás egyértelműen rs232-ről ír, de ez kezd gyanús lenni.
Mint írtam, a hiba már megoldódott, most már csak egyszerűen b@ssza a csőrömet, hogy nem müködik.
Mint írtam, a hiba már megoldódott, most már csak egyszerűen b@ssza a csőrömet, hogy nem müködik.
Cím: Re:Léptetőmotor
Írta: klaviokft Dátum 2020 november 19, 10:31
Írta: klaviokft Dátum 2020 november 19, 10:31
Szia,
Csináltam képet a gyári kábel bekötéséről!
Üdv,
Attila
(https://hobbicncforum.hu/uploaded_images/2020/11/tn_dawdhnwmvvz4yjs4qqwj_5432.jpg) (https://hobbicncforum.hu/uploaded_images/2020/11/dawdhnwmvvz4yjs4qqwj_5432.jpg)
Csináltam képet a gyári kábel bekötéséről!
Üdv,
Attila
(https://hobbicncforum.hu/uploaded_images/2020/11/tn_dawdhnwmvvz4yjs4qqwj_5432.jpg) (https://hobbicncforum.hu/uploaded_images/2020/11/dawdhnwmvvz4yjs4qqwj_5432.jpg)
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2020 november 19, 12:34
Írta: dtb Dátum 2020 november 19, 12:34
Nagyon szépen köszönöm a fáradozásod! (Azt hittem, valami "komolyabb" szerkezet :-) :-) :-)
...Így első ránézésre én is így értelmeztem a rajzokat, tehát akkor valami más lesz a hiba. Este folyt.köv...
...Így első ránézésre én is így értelmeztem a rajzokat, tehát akkor valami más lesz a hiba. Este folyt.köv...
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2020 november 19, 19:40
Írta: dtb Dátum 2020 november 19, 19:40
Siker!
Miután már nem tudom hányszor átmértem a kábel csatlakozásait, és ellenőriztem a lábkiosztásokat, feltűnt, hogy a program minden indításkor 38400-as port sebességgel indul. Korábban én próbáltam ugyan különböző sebességeket, de azoknál nem volt semmi sikerélmény. Ahhoz, hogy működjön is, kellett még a rendszergazdaként való futtatás, és a Win7 kompatiblis mód kiválasztása, így már hajlandó volt 64 bites Win10-en is elindulni.
A vicc az egészben az, hogy ez a program végül is nem is alkalmas arra, amiért eredetileg elkezdtem vele foglalkozni, vagyis hogy kiolvassam vele a hardveres hibakód értékét. Ezzel a progival csak a driver beállításait lehet kiolvasni/menteni/betölteni/módodítani, mást nem.
Külön szeretnék köszönetet mondani a Klavio KFT-nek, és Attilának, a gyors segítségért! Ha nem küldi a fotót, lehet, már feladtam volna, így legalább a kábelhibát már egyértelműen ki tudtam zárni a sok-ismeretlenes katyvaszból. Nagy köszönet még egyszer!
Miután már nem tudom hányszor átmértem a kábel csatlakozásait, és ellenőriztem a lábkiosztásokat, feltűnt, hogy a program minden indításkor 38400-as port sebességgel indul. Korábban én próbáltam ugyan különböző sebességeket, de azoknál nem volt semmi sikerélmény. Ahhoz, hogy működjön is, kellett még a rendszergazdaként való futtatás, és a Win7 kompatiblis mód kiválasztása, így már hajlandó volt 64 bites Win10-en is elindulni.
A vicc az egészben az, hogy ez a program végül is nem is alkalmas arra, amiért eredetileg elkezdtem vele foglalkozni, vagyis hogy kiolvassam vele a hardveres hibakód értékét. Ezzel a progival csak a driver beállításait lehet kiolvasni/menteni/betölteni/módodítani, mást nem.
Külön szeretnék köszönetet mondani a Klavio KFT-nek, és Attilának, a gyors segítségért! Ha nem küldi a fotót, lehet, már feladtam volna, így legalább a kábelhibát már egyértelműen ki tudtam zárni a sok-ismeretlenes katyvaszból. Nagy köszönet még egyszer!
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2020 november 21, 15:54
Írta: ANTAL GÁBOR Dátum 2020 november 21, 15:54
Olyan kolléga jelentkezését várnám ( ha lehet hátfő délig) aki belekukkantott már a Lichuan LCDA86H léptető driver programjába . Lehet ott áramot ill tartóáramot állítani ?
A gyári beállítást kevésnek érzem mert egy 5 amperes (peak) kommersz vezérlő szépen teszi a dolgát a Lichuan pedig belehal .
Az is kérdés lenne hogy milyen op rendszerrel megy a program?. Megy virtuális COM portról ?
Hétfőn hívnám a Klaviós Tibor Attilát aki biztos sok dologban el fog igazítani...
A gyári beállítást kevésnek érzem mert egy 5 amperes (peak) kommersz vezérlő szépen teszi a dolgát a Lichuan pedig belehal .
Az is kérdés lenne hogy milyen op rendszerrel megy a program?. Megy virtuális COM portról ?
Hétfőn hívnám a Klaviós Tibor Attilát aki biztos sok dologban el fog igazítani...
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2020 november 21, 16:22
Írta: dtb Dátum 2020 november 21, 16:22
Szia Gábor. A képen a te vezérlőd adatai vannak.
(https://hobbicncforum.hu/uploaded_images/2020/11/tn_xh7h6mabkw5kvz5i7f_5978.png) (https://hobbicncforum.hu/uploaded_images/2020/11/xh7h6mabkw5kvz5i7f_5978.png)
(https://hobbicncforum.hu/uploaded_images/2020/11/tn_xh7h6mabkw5kvz5i7f_5978.png) (https://hobbicncforum.hu/uploaded_images/2020/11/xh7h6mabkw5kvz5i7f_5978.png)
Cím: Re:Léptetőmotor
Írta: klaviokft Dátum 2020 november 21, 16:50
Írta: klaviokft Dátum 2020 november 21, 16:50
Szia Gábor!
A motor paramétereit automatikusan beállítja.
Legtöbbször az szokott a baj lenni, hogy nagyon hamar elérjük a hibaszámot és lekapcsol a vezérlő.
Próbáld a PA008-at állítani, intenzíven meg kell növelni monjuk 5000-re és szép lassan visszamenni amikor még az alkalmazás elviseli.
Ha lehet win7 32 bit rendszergazdai módban biztosan kommunikál. USB-RS232 átalakítókkal nem mindegyikkel hajlandó menni, de amivel megy a PLC programozás, vagy Leadshine programozás azzal ez a progi is megy.
Az eszközkezelőben kiolvasható az aktív port száma.
üdv,
Attila
A motor paramétereit automatikusan beállítja.
Legtöbbször az szokott a baj lenni, hogy nagyon hamar elérjük a hibaszámot és lekapcsol a vezérlő.
Próbáld a PA008-at állítani, intenzíven meg kell növelni monjuk 5000-re és szép lassan visszamenni amikor még az alkalmazás elviseli.
Ha lehet win7 32 bit rendszergazdai módban biztosan kommunikál. USB-RS232 átalakítókkal nem mindegyikkel hajlandó menni, de amivel megy a PLC programozás, vagy Leadshine programozás azzal ez a progi is megy.
Az eszközkezelőben kiolvasható az aktív port száma.
üdv,
Attila
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2020 november 21, 18:16
Írta: dtb Dátum 2020 november 21, 18:16
A CH340 chipes kinai vezérlővel 100%, hogy nem megy. Most már, a biztos támpontok mellett visrosszaktam újra, kipróbáltam azt is, de meg se mukkant. Más fajta most nincs nekem itthon.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2020 november 21, 19:36
Írta: ANTAL GÁBOR Dátum 2020 november 21, 19:36
Kedves Attila!.
Megpróbálom pontosan leírni a jelenséget :
Encoderes üzemben szépen teljesít . (Egy nagy erővel terhelt golyósorsót hajt ).Létrehozok egy bizonyos terhelést és megszüntetem a step jeleket.Néhány másodperc után a léptetőből egy kemény kalapácsütés szerű hang jön ki ami kb 3-4 másodpercenként megismétlődik .
A hipotézisem : kicsiny a tartóáram és a rugalmasan előfeszített orsó ( és egyebek) egy kissé visszamozdítja a motor forgórészét ami encoder hibát generál , amire válaszol a driver : Elvileg minden Ok de a kalapálást nem lehet megengedni .
Kipróbáltam nyilt hurkú üzemben is. Sajnos akkor alapból gyenge . A DTB által küldött paraméter listából ez a hipotézis bizonyítást nyert mert ott a nyilt hurkú áram az a névleges áram 50% a . ( a tartóáram ennek a 40% a )
Beraktam egy MSDE70-7 es drivert.
5.1amper csúcsárammal half tartóárammal szépen teljesít
Nekifogtam és csináltam kábelt . Egy Max232 vel szerelt virtuális COM porttal sikerült lekérdezni(Oprendszer :XP) az én driveremet . Sajnos annál nincs is nyilt hurkú paraméter . A P008 as paraméter gyárilag 4000 . Holnap megpróbálom megnövelni ( és a tartóáramot is felveszem 40% ról 50 % ra .
Magánban szívesen folytatnám....
Megpróbálom pontosan leírni a jelenséget :
Encoderes üzemben szépen teljesít . (Egy nagy erővel terhelt golyósorsót hajt ).Létrehozok egy bizonyos terhelést és megszüntetem a step jeleket.Néhány másodperc után a léptetőből egy kemény kalapácsütés szerű hang jön ki ami kb 3-4 másodpercenként megismétlődik .
A hipotézisem : kicsiny a tartóáram és a rugalmasan előfeszített orsó ( és egyebek) egy kissé visszamozdítja a motor forgórészét ami encoder hibát generál , amire válaszol a driver : Elvileg minden Ok de a kalapálást nem lehet megengedni .
Kipróbáltam nyilt hurkú üzemben is. Sajnos akkor alapból gyenge . A DTB által küldött paraméter listából ez a hipotézis bizonyítást nyert mert ott a nyilt hurkú áram az a névleges áram 50% a . ( a tartóáram ennek a 40% a )
Beraktam egy MSDE70-7 es drivert.
5.1amper csúcsárammal half tartóárammal szépen teljesít
Nekifogtam és csináltam kábelt . Egy Max232 vel szerelt virtuális COM porttal sikerült lekérdezni(Oprendszer :XP) az én driveremet . Sajnos annál nincs is nyilt hurkú paraméter . A P008 as paraméter gyárilag 4000 . Holnap megpróbálom megnövelni ( és a tartóáramot is felveszem 40% ról 50 % ra .
Magánban szívesen folytatnám....
Cím: Re:Léptetőmotor
Írta: őrülT-Tudós Dátum 2020 november 23, 09:12
Írta: őrülT-Tudós Dátum 2020 november 23, 09:12
Üdv,
1 vezérlőről szeretnék 2 léptetőmotort meghajtani. A motor 4A a vezérlő tudja a 8A-t. Nekem a párhuzamos bekötés tűnik kézenfekvőnek, de még sosem kötöttem be így motorokat. Meg tudna valaki erősíteni ebben?
(https://hobbicncforum.hu/uploaded_images/2020/11/tn_g9vc7mj79u5h3czb8fx6_5292.png) (https://hobbicncforum.hu/uploaded_images/2020/11/g9vc7mj79u5h3czb8fx6_5292.png)
1 vezérlőről szeretnék 2 léptetőmotort meghajtani. A motor 4A a vezérlő tudja a 8A-t. Nekem a párhuzamos bekötés tűnik kézenfekvőnek, de még sosem kötöttem be így motorokat. Meg tudna valaki erősíteni ebben?
(https://hobbicncforum.hu/uploaded_images/2020/11/tn_g9vc7mj79u5h3czb8fx6_5292.png) (https://hobbicncforum.hu/uploaded_images/2020/11/g9vc7mj79u5h3czb8fx6_5292.png)
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2020 november 23, 11:19
Írta: dtb Dátum 2020 november 23, 11:19
Szerintem nem jó ötlet, én már megszívtam vele.
Külön meghajtó, "Slave" mód a mach3/ucnc/akármi programban a tuti.
Külön meghajtó, "Slave" mód a mach3/ucnc/akármi programban a tuti.
Cím: Re:Léptetőmotor
Írta: őrülT-Tudós Dátum 2020 november 23, 11:58
Írta: őrülT-Tudós Dátum 2020 november 23, 11:58
Megkérdezhetem milyen problémát okozott?
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2020 november 23, 12:20
Írta: dtb Dátum 2020 november 23, 12:20
Még a legelső, minden szempontból nagyon kezdetleges (alu elemek, kinai $5 vezérlő) gépemnél próbáltam ezt a megoldást, de elég sűrűn megszorult a tengely, mintha ellenkező irányba léptek volna a motorok a két oldalon.
Cím: Re:Léptetőmotor
Írta: őrülT-Tudós Dátum 2020 november 23, 13:27
Írta: őrülT-Tudós Dátum 2020 november 23, 13:27
Köszönöm, már más is írt a lehetséges hibákkal kapcsolatban. Akkor marad az 1 vezérlő 1 motor felállás. Még egy kérdés lenne ehhez a verzióhoz. Az említett "Slave" mód miért szükséges hozzá? Nem elég ha áthidalom a 2 vezérlőre a step/dir jeleket?
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2020 november 23, 15:56
Írta: dtb Dátum 2020 november 23, 15:56
Szerintem már az is jobb, mint az egy driver/két motor felállás, de a "slave" mód az "elegánsabb"... de kinek a pap, kinek a papné...
Cím: Re:Léptetőmotor
Írta: fw04c8p0y Dátum 2021 január 18, 18:39
Írta: fw04c8p0y Dátum 2021 január 18, 18:39
Sziasztok, valaki tudna segíteni abban, hogy melyik "breakout board"-ot érdemes megvenni, amelyik USB porton keresztül csatlakozik a PC-hez és tud 5 drivert vezérelni? Egy 4 tengelyes gépet szeretnék építeni, de az egyik tengelyt 2 driver/motor páros hajtana meg.
Cím: Re:Léptetőmotor
Írta: MacGyver Dátum 2021 január 19, 14:31
Írta: MacGyver Dátum 2021 január 19, 14:31
Elegánsabb, akkor ha a step / dir jelek valós időben képesen egyszerre megtörténni.
Gondolok itt az LPT portról érkező STEP/DIR jelekre - ebben az esetben nem biztos hogy teljesen egyszerre kap jelet a két vezérlő.
Nekem is LPT portos gépem van, nekem is kell egyszerre két steppert hajtani, és a két motorvezérlő párhuzamosan van kötve egy STEP/DIR csatornára, és jól megy.
Ha van valami realtime működő mikrovezérlő (vagy esetleg FPGA) alapú USB-s / LAN-os breakout boardod, azok valószinű tudják a kimenetükön nagyon pontosan egyszerre adni a STEP jeleket - ebben az esetben valóban a legjobb a SLAVE beállítás.
Gondolok itt az LPT portról érkező STEP/DIR jelekre - ebben az esetben nem biztos hogy teljesen egyszerre kap jelet a két vezérlő.
Nekem is LPT portos gépem van, nekem is kell egyszerre két steppert hajtani, és a két motorvezérlő párhuzamosan van kötve egy STEP/DIR csatornára, és jól megy.
Ha van valami realtime működő mikrovezérlő (vagy esetleg FPGA) alapú USB-s / LAN-os breakout boardod, azok valószinű tudják a kimenetükön nagyon pontosan egyszerre adni a STEP jeleket - ebben az esetben valóban a legjobb a SLAVE beállítás.
Cím: Re:Léptetőmotor
Írta: 5kye5guy9 Dátum 2021 február 03, 09:20
Írta: 5kye5guy9 Dátum 2021 február 03, 09:20
Sziasztok,
a következő problémába futottam bele, tudtok erre esetleg megoldást?
Adott egy hajtás, átlagos méretű 57HSG76-3004A léptetőmotorral, 4,2V/3A/1,9Nm.
Próbáltam 3 Leadshine vezérlővel M542, EM503, EM806, mindegyikkel tökéletesen működik.
Viszont a 2 kicsivel elég fülsértő össze-vissza ciripelő motorhangot produkál, az EM806-tal viszont sokkal halkabb, és kellemesebb, épphogy sustorgó hangja van.
A táp 36V/8A torroid trafós.
Mi lehet ennek az oka? Jó lenne a kicsik közül valamelyiket használni, mert teljesítményben bőven elég lenne, nem akarnék feltétlen ágyúval (EM806-tal) lőni verébre, de az akusztikai különbség nagyon számottevő.
(https://hobbicncforum.hu/uploaded_images/2021/02/tn_cewxfme8vmspvhmqegd76_1982.jpg) (https://hobbicncforum.hu/uploaded_images/2021/02/cewxfme8vmspvhmqegd76_1982.jpg)
a következő problémába futottam bele, tudtok erre esetleg megoldást?
Adott egy hajtás, átlagos méretű 57HSG76-3004A léptetőmotorral, 4,2V/3A/1,9Nm.
Próbáltam 3 Leadshine vezérlővel M542, EM503, EM806, mindegyikkel tökéletesen működik.
Viszont a 2 kicsivel elég fülsértő össze-vissza ciripelő motorhangot produkál, az EM806-tal viszont sokkal halkabb, és kellemesebb, épphogy sustorgó hangja van.
A táp 36V/8A torroid trafós.
Mi lehet ennek az oka? Jó lenne a kicsik közül valamelyiket használni, mert teljesítményben bőven elég lenne, nem akarnék feltétlen ágyúval (EM806-tal) lőni verébre, de az akusztikai különbség nagyon számottevő.
(https://hobbicncforum.hu/uploaded_images/2021/02/tn_cewxfme8vmspvhmqegd76_1982.jpg) (https://hobbicncforum.hu/uploaded_images/2021/02/cewxfme8vmspvhmqegd76_1982.jpg)
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2021 február 03, 09:31
Írta: 000000000 Dátum 2021 február 03, 09:31
Csörrenj rám, és segítek, elmondom, milyen lehetőségeid vannak.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2021 február 20, 10:44
Írta: dtb Dátum 2021 február 20, 10:44
Lenne pár kérdésem, amire nem nagyon találtam válaszokat a neten. Első, hogy a closed loop-os vezérlőknél hogyan oldják meg, ha eltérő a választott mikrolépés, mint a motoron levő enkóder felbontása? Az egyértelmű, hogy mindig az enkóder tárcsa valahányszorosa a választható mikrolépés, de ezt hogy kezeli le a vezérlő? Honnan tudja, mondjuk egy 1000-es enkóder esetén, hogy sikeres volt a mikrolépés, ha mondjuk 4000 mikrolépesre van beállítva? Ilyenkor elvileg 4 mikrolépésnek kellene történnie ahhoz, hogy az enkóder osztása egyet lépjen, és signált adjon. Ez hogy működik?
Ugyanehhez kapcsolódva, gyakori, hogy kétféle lépés osztás van megadva,(pl. egy LCDA86H (https://www.aliexpress.com/item/32799547111.html)) Ennél van egy 800 és ennek töbszörösei, és 1000 és ennek többszörösei választható mikrolépés tartomány, ugyanakkor az enkóder disk szinte 100%, hogy csak egyféle skálát tartalmaz. Ilyenkor lehet tudni, hogy milyen az enkóder felbontása a valóságban, műszer, szkóp nélkül? Melyik lehet a két érték közül a valóságos? Ezt hogyan kezeli a driver?
Harmadik kérdés még mindig ezekhez kapcsolódik: Egy ilyen, fentebb is linkelt vezérlővel lehet házilag felszerelt E6B2CWZ6C OMRON Rotary Encoder (https://www.aliexpress.com/item/4001109112858.html) enkóderrel "normál" léptetőmotort vezérelni? Sikerült már valakinek az ilyen mutatvány?
Ugyanehhez kapcsolódva, gyakori, hogy kétféle lépés osztás van megadva,(pl. egy LCDA86H (https://www.aliexpress.com/item/32799547111.html)) Ennél van egy 800 és ennek töbszörösei, és 1000 és ennek többszörösei választható mikrolépés tartomány, ugyanakkor az enkóder disk szinte 100%, hogy csak egyféle skálát tartalmaz. Ilyenkor lehet tudni, hogy milyen az enkóder felbontása a valóságban, műszer, szkóp nélkül? Melyik lehet a két érték közül a valóságos? Ezt hogyan kezeli a driver?
Harmadik kérdés még mindig ezekhez kapcsolódik: Egy ilyen, fentebb is linkelt vezérlővel lehet házilag felszerelt E6B2CWZ6C OMRON Rotary Encoder (https://www.aliexpress.com/item/4001109112858.html) enkóderrel "normál" léptetőmotort vezérelni? Sikerült már valakinek az ilyen mutatvány?
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2021 február 20, 12:31
Írta: TBS-TEAM Dátum 2021 február 20, 12:31
Ha az encoder 1000 felbontású:
Akkor A-B 2db felfutó él és 2db lefutó él.= 4000
1 mikro lépés= 1 impulzus
4000:800=5
1 lépés=5 impulzus [#eplus2]
(https://hobbicncforum.hu/uploaded_images/2021/02/tn_gitzt0b28tu4bg3u9w_3344.png) (https://hobbicncforum.hu/uploaded_images/2021/02/gitzt0b28tu4bg3u9w_3344.png)
Akkor A-B 2db felfutó él és 2db lefutó él.= 4000
1 mikro lépés= 1 impulzus
4000:800=5
1 lépés=5 impulzus [#eplus2]
(https://hobbicncforum.hu/uploaded_images/2021/02/tn_gitzt0b28tu4bg3u9w_3344.png) (https://hobbicncforum.hu/uploaded_images/2021/02/gitzt0b28tu4bg3u9w_3344.png)
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2021 február 20, 13:00
Írta: dtb Dátum 2021 február 20, 13:00
Igen... Ennyi még nekem is megvan :-) ...ez még hardveresen talán belefér. ...de mi van egy nagyobb, pl. 20.000, vagy 40.000 mikrolépés felbontásnál? Honnan tudja a vezérlő, hogy ténylegesen megtörtént a lépés? Tehát az osztás-közi lépéseknél honnan kap "Lépés megtörtént" jelet?
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2021 február 20, 13:28
Írta: TBS-TEAM Dátum 2021 február 20, 13:28
Nagyobb felbontásnál Pufferbe kerül a megtett lépések száma.
1000 encoder.
40000 mikrolépés:4000=10 lépés
A számított mikrolépéseket elméleti megtörtént lépésnek veszi a vezérlő, és minden 10-ik lépésnél van a számított és valós adatok közötti összehasonlítás.
Egyezés esetén OK. [#taps]
Eltérés esetén: Error. [#zavart2]
1000 encoder.
40000 mikrolépés:4000=10 lépés
A számított mikrolépéseket elméleti megtörtént lépésnek veszi a vezérlő, és minden 10-ik lépésnél van a számított és valós adatok közötti összehasonlítás.
Egyezés esetén OK. [#taps]
Eltérés esetén: Error. [#zavart2]
Cím: Re:Léptetőmotor
Írta: Kicsa Dátum 2021 február 20, 14:40
Írta: Kicsa Dátum 2021 február 20, 14:40
Szia!
Épp a minap volt nálam kölcsönbe egy 7,5 Nm-es,visszacsatolt léptető tesztre. Ez a kérdés foglalkoztatott engem is,csináltam egy gyors tesztet.
LPT-s leválasztókártyára volt kötve a vezérlő, Mach3 vezérlés,mechanika nélkül csak a motor.
Minden állapotban a Machban beállítottam egységnyi lépést és figyeltem azt,hogy hogyan reagál a motor.
1. Vezérlő 400 lépéses üzemmód,Machban szintén 1 mm-re 400 lépés. Tehát 1 mm = egy tengelyfordulat.
0,01 mm elmozdulást szépen lép, 0,001 elmozdulás állításánál pedig a következő választ adja az impulzussorozatnál: nem lép, nem lép , lép , nem lép , lép
2. Vezérlő - 800 lépés - Mach3 800 lépés/mm
0,001 egységeket lépve : lép , lép , lép , lép , nem lép , lép , lép , lép , lép
3. 1600-as felbontás : 0,001 szemre folyamatosnak tűnik de mintha,nem lenne sima a járás,bizonytalan
4. 3200-as felbontás : 0,001 minden impulzusra lelépi és szemre egyenletes.
Remélem érthető a teszt és az eredmény,talán tudtam segíteni.
Épp a minap volt nálam kölcsönbe egy 7,5 Nm-es,visszacsatolt léptető tesztre. Ez a kérdés foglalkoztatott engem is,csináltam egy gyors tesztet.
LPT-s leválasztókártyára volt kötve a vezérlő, Mach3 vezérlés,mechanika nélkül csak a motor.
Minden állapotban a Machban beállítottam egységnyi lépést és figyeltem azt,hogy hogyan reagál a motor.
1. Vezérlő 400 lépéses üzemmód,Machban szintén 1 mm-re 400 lépés. Tehát 1 mm = egy tengelyfordulat.
0,01 mm elmozdulást szépen lép, 0,001 elmozdulás állításánál pedig a következő választ adja az impulzussorozatnál: nem lép, nem lép , lép , nem lép , lép
2. Vezérlő - 800 lépés - Mach3 800 lépés/mm
0,001 egységeket lépve : lép , lép , lép , lép , nem lép , lép , lép , lép , lép
3. 1600-as felbontás : 0,001 szemre folyamatosnak tűnik de mintha,nem lenne sima a járás,bizonytalan
4. 3200-as felbontás : 0,001 minden impulzusra lelépi és szemre egyenletes.
Remélem érthető a teszt és az eredmény,talán tudtam segíteni.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2021 február 20, 15:02
Írta: dtb Dátum 2021 február 20, 15:02
Igen, köszi! Számomra ebből, és a korábbi válasz(ok)ból az derült ki, hogy ezek szerint ez a closed loop-os rendszer is "szemfényvesztés" valamilyen szinten, hiszen ha az áttétel, vagy a vélt pontosság növelése miatt emelődik a mikrolépések száma, akkor ezekből a lépésekből nem garantált mindegyiknél a tényleges visszacsatolás. Másképp fogalmazva, mindig ismerni kell az enkóder felbontását, és csak ennek függvényében szabad emelni a mikrolépés számot, ameddig a tényleges hardveres felbontásba belefér, a korábbi példában szereplő ezres enkódernél ez max 4000 mikrolépést jelent, e felett már nem garantált a tényleges pontosság. ...ha jól értelmeztem az eddigieket.
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2021 február 20, 15:40
Írta: B.Zoltán Dátum 2021 február 20, 15:40
Valamit nem értek a tesztednél.
Pl. 400 lépéses módban a legkisebb felbontás 0,0025mm, hogy akarsz te 0,001mm elmozdulást? A Mach nem fog kiadni impulzust, mert tudja, hogy a vezérlő 1 lépése 0,0025 mm lesz, ezért ha kiadna impulzust, hibás lenne az elmozdulás.
Ezért megvárja, hogy összegyűljön 3 lépés, ami jelen esetben 0,003 mm, és akkor ad ki egy impulzust, amire a motor 0,0025-t fog lépni. De a Mach3 megjegyzi, hogy még maradt egy 0,0005 mm.
És ha megfigyeled, a többi is jó, mert a többi mikrolépésnél módnál is ugyanez a helyzet, csak másképp alakulnak az összegyűjtött maradékok.
Feltételezésem szerint az a vezérlő tökéletesen teszi a dolgát.
Pl. 400 lépéses módban a legkisebb felbontás 0,0025mm, hogy akarsz te 0,001mm elmozdulást? A Mach nem fog kiadni impulzust, mert tudja, hogy a vezérlő 1 lépése 0,0025 mm lesz, ezért ha kiadna impulzust, hibás lenne az elmozdulás.
Ezért megvárja, hogy összegyűljön 3 lépés, ami jelen esetben 0,003 mm, és akkor ad ki egy impulzust, amire a motor 0,0025-t fog lépni. De a Mach3 megjegyzi, hogy még maradt egy 0,0005 mm.
És ha megfigyeled, a többi is jó, mert a többi mikrolépésnél módnál is ugyanez a helyzet, csak másképp alakulnak az összegyűjtött maradékok.
Feltételezésem szerint az a vezérlő tökéletesen teszi a dolgát.
Cím: Re:Léptetőmotor
Írta: B.Zoltán Dátum 2021 február 20, 15:53
Írta: B.Zoltán Dátum 2021 február 20, 15:53
Idéz3. 1600-as felbontás : 0,001 szemre folyamatosnak tűnik de mintha,nem lenne sima a járás,bizonytalan
Ez meg abból adódik, hogy a léptetőmotor felbontása ebben az esetben 0,000625, és ha te 0,001 mozgást adsz ki, a motor egyszer 1-et lép, máskor egymás után gyorsan 2-t (ahogy a Mach3-at megírták). De mindenképpen nem lesz egyenletes a step jel. Akkor lenne egyenletes, ha a kiadott elmozdulás értéke megegyezik, vagy többszöröse a léptetővezérlő felbontásából adódó legkisebb elmozdulásnak.
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2021 február 20, 15:56
Írta: TBS-TEAM Dátum 2021 február 20, 15:56
Nem értetted meg.
Ha a vezérlöhöz a megfelelő motort csatolod akkor a lépés megtörténik.
A vezérlő az előbbi Pl: 40000 felbontást tud.
A motor 40000 mikrolépést tud 1 fordulat alatt.
Encoder 1000 A-B =4000 impulzus/fordulat.
10 mikrolépést lép a motor a vezérlő számolja memoriába
10 után 1 impulzus az encodertől.
Ha megjön az ipulzus az encodertől akkor minden OK nem áll ki hibára.
Ha nem jön meg a várt impulzus az encodertől 10 lépésenként akkor ERROR.
Kicsa nem gondolta átt a méréseit így hibás lett a a következtetés az eredmény jó lett.
A vezérlő helyesen járt el.
400 felbontást adott meg 1 fordulatra.
Kiadott 0.001mm parancs: 400:100=4
4 impulzus a vezérlőnek minden parancsnál
lép 4-et a motor mindig.
1 parancs:0.001mm : 400:1000=0.4
1 parancs nincs impulzus, 0,4
+1 parancs nincs impulzus 0,8
+ 1 parancs 1 impulzus 1,2
0,4 nem lép
+0.4=0,8 nem lép
0,8+0,4=1,2 1 lép a vezérlő stb.....
Ha a vezérlöhöz a megfelelő motort csatolod akkor a lépés megtörténik.
A vezérlő az előbbi Pl: 40000 felbontást tud.
A motor 40000 mikrolépést tud 1 fordulat alatt.
Encoder 1000 A-B =4000 impulzus/fordulat.
10 mikrolépést lép a motor a vezérlő számolja memoriába
10 után 1 impulzus az encodertől.
Ha megjön az ipulzus az encodertől akkor minden OK nem áll ki hibára.
Ha nem jön meg a várt impulzus az encodertől 10 lépésenként akkor ERROR.
Kicsa nem gondolta átt a méréseit így hibás lett a a következtetés az eredmény jó lett.
A vezérlő helyesen járt el.
400 felbontást adott meg 1 fordulatra.
Kiadott 0.001mm parancs: 400:100=4
4 impulzus a vezérlőnek minden parancsnál
lép 4-et a motor mindig.
1 parancs:0.001mm : 400:1000=0.4
1 parancs nincs impulzus, 0,4
+1 parancs nincs impulzus 0,8
+ 1 parancs 1 impulzus 1,2
0,4 nem lép
+0.4=0,8 nem lép
0,8+0,4=1,2 1 lép a vezérlő stb.....
Cím: Re:Léptetőmotor
Írta: Kicsa Dátum 2021 február 20, 17:08
Írta: Kicsa Dátum 2021 február 20, 17:08
Ez részemről egy gyorsan összerakott teszt volt,az egység határait keresve. Kíváncsi voltam arra,hogy ha egy ilyen motor (1000-res enkóder) ilyen konfigurációban (akár 20.000-40.000 mikrolépés/fordulat) dolgozik,akkor mi hogyan történik meg.
Kíváncsi voltam arra is,hogy mi a legkisebb egység,amit le lehet léptetni ezzel a visszacsatolt motorral,mivel ilyennel eddig nem volt dolgom. (Építettem már gépet pici DC szervóval és hagyományos léptetővel is)
Igazából itt nem a rendszer jóságát vizsgáltam illetve kritizáltam,csupán kíváncsi voltam tesztkörülmények között,hogy mit kezd a rendszer az enkóder felbontásánál kisebb elmozdulási értékekre.
De köszönöm az információkat,így kezd tiszta lenni az egész rendszer "mi-miértje".
Kíváncsi voltam arra is,hogy mi a legkisebb egység,amit le lehet léptetni ezzel a visszacsatolt motorral,mivel ilyennel eddig nem volt dolgom. (Építettem már gépet pici DC szervóval és hagyományos léptetővel is)
Igazából itt nem a rendszer jóságát vizsgáltam illetve kritizáltam,csupán kíváncsi voltam tesztkörülmények között,hogy mit kezd a rendszer az enkóder felbontásánál kisebb elmozdulási értékekre.
De köszönöm az információkat,így kezd tiszta lenni az egész rendszer "mi-miértje".
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2021 február 20, 19:23
Írta: dtb Dátum 2021 február 20, 19:23
Értettem az első, meg a mostani írásod is. Most is azt írod, hogy 10 lépésenként ad egy ellenőrző signalt. Erre írtam azt, hogy ilyenkor gyakorlatilag "vakon repül" a driver, nincs visszacsatolás, és minél nagyobb a választott mikrofelbontás, annál nagyobb lesz az ilyen vakrepülések aránya.
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2021 február 20, 20:54
Írta: TBS-TEAM Dátum 2021 február 20, 20:54
Nevezheted vakrepülésnek két impulzus között, de valjuk be nem nagyon életszerű ilyen mikrolépéses gép készítése ilyen mezei visszacsatolású technikával. [#kacsint]
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2021 február 21, 13:02
Írta: svejk Dátum 2021 február 21, 13:02
Ha így nézed szemfényvesztés.
De azt hiszed a direkt léptetőmotorod ott jár ahol gondolod?
Hát nem... +- 4 egész lépés közt kavillál, ha ezt meghaladja akkor lépést veszt.
A szervo is hol lemarad, hol siet.
Gyorsjáratban főleg.
Többek közt ezért kellene optimalizálni a hajtást, hogy a tényleges munka közben minél kevésbé erőlködjon az adot motor.
De azt hiszed a direkt léptetőmotorod ott jár ahol gondolod?
Hát nem... +- 4 egész lépés közt kavillál, ha ezt meghaladja akkor lépést veszt.
A szervo is hol lemarad, hol siet.
Gyorsjáratban főleg.
Többek közt ezért kellene optimalizálni a hajtást, hogy a tényleges munka közben minél kevésbé erőlködjon az adot motor.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2021 február 21, 13:32
Írta: 000000000 Dátum 2021 február 21, 13:32
"+- 4 egész lépés közt kavillál"
A fele az igaz. Azaz helyesen +-2 ...
Aztán utána így nem egy egész lépést veszt, hanem egyből négyet vagy annak a többszörösét.
A fele az igaz. Azaz helyesen +-2 ...
Aztán utána így nem egy egész lépést veszt, hanem egyből négyet vagy annak a többszörösét.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2021 február 21, 13:34
Írta: svejk Dátum 2021 február 21, 13:34
Valóban, köszi a helyesbítést!
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2021 február 21, 13:48
Írta: dtb Dátum 2021 február 21, 13:48
Nem, nem hiszek semmit, :-) csak valóban nem találtam erre választ a neten, és érdekel. Köszönöm a válaszokat!
Cím: Re:Léptetőmotor
Írta: thayscj6c Dátum 2021 március 03, 18:50
Írta: thayscj6c Dátum 2021 március 03, 18:50
Hali!
Szuper jó!https://www.youtube.com/watch?v=TOA6mRvp_bY&t=1s
Szuper jó!https://www.youtube.com/watch?v=TOA6mRvp_bY&t=1s
Cím: Re:Léptetőmotor
Írta: frob Dátum 2021 augusztus 23, 19:37
Írta: frob Dátum 2021 augusztus 23, 19:37
Sziasztok
Ezekről a easy servo nak nevezett léptetőmocis (https://webaruhaz.klavio.hu/?id=85b75cfc564c4822863dbd4884138991&p=termeklap&nk=0&tkod=2851) dolgokról van valakinek tapasztalata?
igen kedvező az áruk a rendes AC szervóhoz képest...
R.
Ezekről a easy servo nak nevezett léptetőmocis (https://webaruhaz.klavio.hu/?id=85b75cfc564c4822863dbd4884138991&p=termeklap&nk=0&tkod=2851) dolgokról van valakinek tapasztalata?
igen kedvező az áruk a rendes AC szervóhoz képest...
R.
Cím: Re:Léptetőmotor
Írta: 9pk59nuy Dátum 2021 augusztus 23, 19:47
Írta: 9pk59nuy Dátum 2021 augusztus 23, 19:47
Viszont az AC szervonak igen kedvező tulajdonságai vannak az easy servohoz képest.
Cím: Re:Léptetőmotor
Írta: frob Dátum 2021 augusztus 24, 07:14
Írta: frob Dátum 2021 augusztus 24, 07:14
közel ha nem több dupla árért...
bár ha 5Nm -es változatot nézem inkább x3-4
persze AC szervó az ac szervó, szuper dolog, de most talán elég lenne ez is, csak nagyon ismeretlen terület...
bár ha 5Nm -es változatot nézem inkább x3-4
persze AC szervó az ac szervó, szuper dolog, de most talán elég lenne ez is, csak nagyon ismeretlen terület...
Cím: Re:Léptetőmotor
Írta: 9pk59nuy Dátum 2021 augusztus 24, 08:56
Írta: 9pk59nuy Dátum 2021 augusztus 24, 08:56
Ha az 5Nm körüli motorokról beszélünk, akkor példának hozom fel a saját 500as esztergámat, ami 6Nm-es motorokkal szerelt, és tizenéve egyetlen tévesztése vagy leállása sem volt. Áttétel nélkül hajtja a golyósorsókat, a gyorsjárat sebessége pedig nincs kihasználva.
Összegezve: Ha megfelelő a léptetőmotor teljesítménye, akkor a hozzácsatolt kontroll elektronika felesleges.
Összegezve: Ha megfelelő a léptetőmotor teljesítménye, akkor a hozzácsatolt kontroll elektronika felesleges.
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2021 augusztus 24, 09:07
Írta: TBS-TEAM Dátum 2021 augusztus 24, 09:07
egy mezei léptetőmotor encoderes visszacsatolással.
Egyik Előnye ha lépésvesztés van kapsz hibaüzenetet a vezérlőtől.
Semmi köze a szervo motorokhoz. [#nevetes1]
Egyik Előnye ha lépésvesztés van kapsz hibaüzenetet a vezérlőtől.
Semmi köze a szervo motorokhoz. [#nevetes1]
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2021 augusztus 24, 10:00
Írta: TBS-TEAM Dátum 2021 augusztus 24, 10:00
A lèptető ès a szervo ua feladatra kèpes, a leglènyegesebb a sebessèg külömbsèg.
Ha sok gyors mozgàs van a szervoval nagyon sok időt lehet nyerni.
Az idő a legdràgàbb azt kell megfizetni. [#wink]j
Ha sok gyors mozgàs van a szervoval nagyon sok időt lehet nyerni.
Az idő a legdràgàbb azt kell megfizetni. [#wink]j
Cím: Re:Léptetőmotor
Írta: frob Dátum 2021 augusztus 24, 13:12
Írta: frob Dátum 2021 augusztus 24, 13:12
ha jól láttam nem csak hibajelzés van, hanem igyekszik visszaállni a beállított helyre is
tehát közel szervó képesség, de persze nem az...
nekem inkább erre a képességére lenne szükségem, ha megnő az erő akkor is menjen végig, még ha le is marad...
R.
tehát közel szervó képesség, de persze nem az...
nekem inkább erre a képességére lenne szükségem, ha megnő az erő akkor is menjen végig, még ha le is marad...
R.
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2021 augusztus 24, 14:27
Írta: TBS-TEAM Dátum 2021 augusztus 24, 14:27
Nem ìgy müködik,hogy majdbehozza a lemaradàst vagy kèsöbb vègez.
Egy 3szöget kell marni A=X B=Y C oldal maràsa közben folyamatosan lemarad mondjuk az X de vègigmegy elfogadható lesz a vègeredmèny??? [#fejvakaras]
Màr az A oldallal sem vègezne időben.
Ugy kellmèretezni a hajtàst, hogy semmilyen körülmènyek között ne legyen kevès a teljesìtmèny.
Az idő a lènyeg a kettő között azt kell megfizetni.
A többi paraszt akìtàs mert majdnem ilyen meg olyan mint a servo, de a majdnem ott van ès megakadàlyozza.[#nevetes1]
Egy 3szöget kell marni A=X B=Y C oldal maràsa közben folyamatosan lemarad mondjuk az X de vègigmegy elfogadható lesz a vègeredmèny??? [#fejvakaras]
Màr az A oldallal sem vègezne időben.
Ugy kellmèretezni a hajtàst, hogy semmilyen körülmènyek között ne legyen kevès a teljesìtmèny.
Az idő a lènyeg a kettő között azt kell megfizetni.
A többi paraszt akìtàs mert majdnem ilyen meg olyan mint a servo, de a majdnem ott van ès megakadàlyozza.[#nevetes1]
Cím: Re:Léptetőmotor
Írta: dezsoe Dátum 2021 augusztus 24, 16:41
Írta: dezsoe Dátum 2021 augusztus 24, 16:41
Nem akarnék vérremenő vitába keveredni, de egy rendesen megépített mechanika esetén leginkább gyorsjáratban van lépésvesztés, mert ott már nem elég erős a léptetőmotor. Gyorsjáratban viszont nem probléma, ha egy-két lépéssel lemarad és azt menet közben szépen behozza. Ha lassú mozgásnál veszít lépést, akkor ott vagy mechanika hiba van, vagy túl gyorsan / túl nagy fogással dolgozik. Ilyenkor viszont egyáltalán nem baj, ha a motor elmegy hibára és leállítja a munkát, még mielőtt az egész anyagot kukázza. Feltéve, persze, hogy a hibajel vissza van vezetve a programba.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2021 augusztus 24, 20:53
Írta: dtb Dátum 2021 augusztus 24, 20:53
Nekem ilyenek vannak, nincs vele gond, beváltak. Csendesebbek, mint a sima léptecs, és gyorsabbak. Nálam is be van kötve az error visszajelzés, de eddig csak a saját balfaszságom okán lépett működésbe, egyébként megbízhatóan működik. Lemaradásnál (vagy ha erőből mozgatom) visszaáll az eredeti pozicióba. Régebben még nem volt az egyik oldalon végálláskapcsoló, és sikerült pont úgy mozgatnom az irány nyilakkal, hogy már ütközött, akkor még nem tiltott le, hanem erőlködve próbált volna tovább lépni, ilyenkor az ellenkező irányú mozgással még visszaállt, viszont olyan is volt, hogy ugyanezt a mutatványt G0-val sikerült produkálni a végállás nélküli oldalra, akkor egyből letiltott. Mindenképp jobb, mint a sima léptető, bár én még jóval olcsóbban vettem anno az alin mind a négyet.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2021 augusztus 24, 21:13
Írta: dtb Dátum 2021 augusztus 24, 21:13
"Nem ìgy müködik,hogy majdbehozza a lemaradàst vagy kèsöbb vègez.
Egy 3szöget kell marni A=X B=Y C oldal maràsa közben folyamatosan lemarad mondjuk az X de vègigmegy elfogadható lesz a vègeredmèny??"
Már késő van, hogy kimenjek a géphez megnézni, hogy mennyi is most a beállított mikrolépés, de ha az alap 800 vagy 1000 lépésre lenne állítva (de nem arra van, nagyobbra!) akkor is 0.00625mm, vagy 0.005mm egy lépés (5mm emelkedésű a tengely). ...vagyis ha tételezzük fel, hogy egy lépést téveszt, és kihagy(na) akkor az még csak századmilliméter, de azt is korrigálja. Szerintem minden marós a fenekét a földhöz verné örömében, ha csak ennyi hibája lenne... szerintem.
Egy 3szöget kell marni A=X B=Y C oldal maràsa közben folyamatosan lemarad mondjuk az X de vègigmegy elfogadható lesz a vègeredmèny??"
Már késő van, hogy kimenjek a géphez megnézni, hogy mennyi is most a beállított mikrolépés, de ha az alap 800 vagy 1000 lépésre lenne állítva (de nem arra van, nagyobbra!) akkor is 0.00625mm, vagy 0.005mm egy lépés (5mm emelkedésű a tengely). ...vagyis ha tételezzük fel, hogy egy lépést téveszt, és kihagy(na) akkor az még csak századmilliméter, de azt is korrigálja. Szerintem minden marós a fenekét a földhöz verné örömében, ha csak ennyi hibája lenne... szerintem.
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2021 augusztus 24, 22:16
Írta: TBS-TEAM Dátum 2021 augusztus 24, 22:16
A gyorsjàratot is ugy kell beàllìtani kiszàmolni a teljesìtmènyt, hogy ne legyen lèpèsvesztès.
Az idö a kritikus külömbsèg a kèt technologia között.
Ennyi.
Az idö a kritikus külömbsèg a kèt technologia között.
Ennyi.
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2021 augusztus 24, 22:23
Írta: TBS-TEAM Dátum 2021 augusztus 24, 22:23
A vezèrlő nem egy lèpès vesztès utàn àll hibàra ne azzal szàmolj.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2021 augusztus 25, 07:56
Írta: dtb Dátum 2021 augusztus 25, 07:56
Igen, én is épp ezt írtam, hogy sikerült úgy ütközéshez léptetnem a motort, hogy még nem tiltott le, hanem mindenáron tovább akart menni.
Igazából ezeknél a hibrid léptetőmotoroknál már csak akkor beszélhetünk lépésvesztésről, ha letilt a vezérlő, és megáll a kóceráj. Minden egyéb esetben a motor vezérlő igyekszik a kapott lépés impulzusok alapján számolt pozicióba mozgatni a motort, és teszi ezt plusz-minusz mindaddig, amíg az enkódertől kapott jelek értéke nem egyezik meg a cnc vezérlőből kapott step jelek értékével... vagyis ilyen szempontból ugyan úgy viselkedik, mint a szervó motor. (szerintem) Ennek egy másik, pozitív hozadéka az, hogy ezek a hibrid léptetőmotorok már nem tudnak kiesni a szinkronból, mert nem csak a cnc vezérlőtől kapott lépést figyeli, hanem figyelembe veszi a saját enkóderétől kapott jeleket is. (Lehet, hogy nem szakszerűen fogalmaztam, de remélem érthető, hogy mire gondolok.)
Szintén egy másik pozitívum, hogy van saját szoftvere, amivel akár át is paraméterezhető, és pl. lejjebb lehet venni az értéket, hogy hány hiba után tiltson le. Ez mondjuk egy érdekes kisérlet lenne...
Igazából ezeknél a hibrid léptetőmotoroknál már csak akkor beszélhetünk lépésvesztésről, ha letilt a vezérlő, és megáll a kóceráj. Minden egyéb esetben a motor vezérlő igyekszik a kapott lépés impulzusok alapján számolt pozicióba mozgatni a motort, és teszi ezt plusz-minusz mindaddig, amíg az enkódertől kapott jelek értéke nem egyezik meg a cnc vezérlőből kapott step jelek értékével... vagyis ilyen szempontból ugyan úgy viselkedik, mint a szervó motor. (szerintem) Ennek egy másik, pozitív hozadéka az, hogy ezek a hibrid léptetőmotorok már nem tudnak kiesni a szinkronból, mert nem csak a cnc vezérlőtől kapott lépést figyeli, hanem figyelembe veszi a saját enkóderétől kapott jeleket is. (Lehet, hogy nem szakszerűen fogalmaztam, de remélem érthető, hogy mire gondolok.)
Szintén egy másik pozitívum, hogy van saját szoftvere, amivel akár át is paraméterezhető, és pl. lejjebb lehet venni az értéket, hogy hány hiba után tiltson le. Ez mondjuk egy érdekes kisérlet lenne...
Cím: Re:Léptetőmotor
Írta: designr Dátum 2021 augusztus 25, 08:30
Írta: designr Dátum 2021 augusztus 25, 08:30
Mindenképpen előnyös a normál léptetőkhöz képest hogy megenged valahány inkrementet a parancsjelhez képest..kiváncsi vagyok ennek mennyi a maximuma..és pl egy emlitett 5Nm-es motornak a nyomaték görbéje milyen..tehát az 5Nm mennyi mondjuk 500-800-as fordulaton..
Az ac szervóknál ugye egyenletes nyomatékról beszélhetünk akár 3000-es fordulatig..
Tehát ha ezek az encoderes motorok fordulat-nyomaték tekintetében megegyeeznek a régiekkel akkor pl az 5Nm nyomatékot egy 100w ac szervó is tud egy 10:1-es bolygóművessel igy kb 0-300-as fordulatig..és onnan kezd esni a nyomatéka a max 500-ig..
Akkor ezt az 5Nm-es motort már egy 200w szervó is kenterbe veri..
Az ac szervóknál ugye egyenletes nyomatékról beszélhetünk akár 3000-es fordulatig..
Tehát ha ezek az encoderes motorok fordulat-nyomaték tekintetében megegyeeznek a régiekkel akkor pl az 5Nm nyomatékot egy 100w ac szervó is tud egy 10:1-es bolygóművessel igy kb 0-300-as fordulatig..és onnan kezd esni a nyomatéka a max 500-ig..
Akkor ezt az 5Nm-es motort már egy 200w szervó is kenterbe veri..
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2021 augusztus 25, 11:56
Írta: D.Laci Dátum 2021 augusztus 25, 11:56
Kicsit sántít így a történet.
Sima mezei kínai motort encoderral felszerelni és összehasonlítani egy profi AC szervóval nem elegáns.
Legalább egy encoderes tárcsa léptetőmotort kel összehasonlítani [#t19p58321#] egy AC szervóval.
Rögtön más a leányzó fekvése.
Sima mezei kínai motort encoderral felszerelni és összehasonlítani egy profi AC szervóval nem elegáns.
Legalább egy encoderes tárcsa léptetőmotort kel összehasonlítani [#t19p58321#] egy AC szervóval.
Rögtön más a leányzó fekvése.
Cím: Re:Léptetőmotor
Írta: 000000000 Dátum 2021 augusztus 25, 12:37
Írta: 000000000 Dátum 2021 augusztus 25, 12:37
Ez is fejlődik elképesztő hogy miket érnek el egy egy szoftveres megoldásal pl "field oriented control" léptecs, bldc vezérléseknél most mutogatot robot rendszerekbe ezek futnak
pl ilyenekben direkt motor (nincs hajtás)...
https://t.me/tabumentes_info/9231
pl ilyenekben direkt motor (nincs hajtás)...
https://t.me/tabumentes_info/9231
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2021 augusztus 25, 14:22
Írta: TBS-TEAM Dátum 2021 augusztus 25, 14:22
[#conf]
Cím: Re:Léptetőmotor
Írta: designr Dátum 2021 augusztus 25, 16:06
Írta: designr Dátum 2021 augusztus 25, 16:06
Semmi bajom a léptetőkkel..nem én kezdtem összehasonlitani..
Nemhiába egy hasonló paraméterű 200w körüli ac szervó szett bőven 200ezer ft fölött kezdődik ujonnan.
Szerencse hogy az iparban levetett hajtásokat még tudjuk hasznosítani..[#eljen]
Nemhiába egy hasonló paraméterű 200w körüli ac szervó szett bőven 200ezer ft fölött kezdődik ujonnan.
Szerencse hogy az iparban levetett hajtásokat még tudjuk hasznosítani..[#eljen]
Cím: Re:Léptetőmotor
Írta: frob Dátum 2021 augusztus 26, 07:05
Írta: frob Dátum 2021 augusztus 26, 07:05
Köszi mindenkinek
kivételesen olyan helyre menne ahol nem gond ha lemarad, csak érjen el odáig ameddig leszámolom neki...
szóval így ár- képesség viszonylatban kezdek barátkozni vele...
az lenne a leg jobb ha lehetne beállítani szoftveresen pl áttételt, és utána soroson le tudnám lökni mennyit menjen egyik irány másik irány és milyen gyorsítással :)
de tudom bilibe lóg a kezem :D
kivételesen olyan helyre menne ahol nem gond ha lemarad, csak érjen el odáig ameddig leszámolom neki...
szóval így ár- képesség viszonylatban kezdek barátkozni vele...
az lenne a leg jobb ha lehetne beállítani szoftveresen pl áttételt, és utána soroson le tudnám lökni mennyit menjen egyik irány másik irány és milyen gyorsítással :)
de tudom bilibe lóg a kezem :D
Cím: Re:Léptetőmotor
Írta: dezsoe Dátum 2021 augusztus 26, 07:45
Írta: dezsoe Dátum 2021 augusztus 26, 07:45
Rádugsz egy párszáz forintos Arduinot és kész. Biztos, hogy találsz hozzá a neten kész programot, de ha mégsem, akkor még mindig ott a grbl vagy akár meg is írhatod. [#email]
Cím: Re:Léptetőmotor
Írta: designr Dátum 2021 augusztus 26, 12:59
Írta: designr Dátum 2021 augusztus 26, 12:59
De ha azt mondom hogy 85-ért adok komplett 400 wattos márkás újszerű ac szervó szettet vezetékkel programozó vezetékkel programmal..? Ha már ár a jó ár érték arány felhozódott..
Cím: Re:Léptetőmotor
Írta: yji2a0wv Dátum 2021 augusztus 29, 19:19
Írta: yji2a0wv Dátum 2021 augusztus 29, 19:19
Hello.Schneider Mdrive 23 léptetőmotorral van-e tapasztalata valakinek? RS 422-458 porton programozható,beépített controller és encoder,90V 4600 microstep.Van pár ilyen motorom ami az adatlapja szerint menne step-dir módban is,nemcsak soros porton,de fel kellene programozni az input-bemeneteket,és a lépésszámot.
Köszönöm.István
Köszönöm.István
Cím: Re:Léptetőmotor
Írta: bjrazucpx Dátum 2021 augusztus 29, 19:36
Írta: bjrazucpx Dátum 2021 augusztus 29, 19:36
... akkor nem várok rájuk :D
Cím: Re:Léptetőmotor
Írta: Tari Gábor Dátum 2021 november 20, 19:39
Írta: Tari Gábor Dátum 2021 november 20, 19:39
Sziasztok,
Adott egy léptetőmotor vezérlő, nema24 4Nm léptetőmotorral.
A vezérlő meghajtható 24-48V feszültséggel.
Most 24V ról megy, és épp határeset a nyomatéka, indulásnál van hogy nem képes forogni. (nem CNC-t hajt).
Ha kicserélem a tápot 48V ra várhatok nyomaték emelkedést, alacsony fordulatszám tartományban?
Milyen mikrostepp beállítással a legnagyobb a nyomaték?
Adott egy léptetőmotor vezérlő, nema24 4Nm léptetőmotorral.
A vezérlő meghajtható 24-48V feszültséggel.
Most 24V ról megy, és épp határeset a nyomatéka, indulásnál van hogy nem képes forogni. (nem CNC-t hajt).
Ha kicserélem a tápot 48V ra várhatok nyomaték emelkedést, alacsony fordulatszám tartományban?
Milyen mikrostepp beállítással a legnagyobb a nyomaték?
Cím: Re:Léptetőmotor
Írta: GPeti1977 Dátum 2021 november 20, 19:45
Írta: GPeti1977 Dátum 2021 november 20, 19:45
Szerintem nem
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2021 november 20, 19:56
Írta: dtb Dátum 2021 november 20, 19:56
P=I x U, vagyis Amper x Volt, tehát ha emeled a feszültséget, akkor azzal nő a leadott teljesítmény. ...de mielőtt növelnéd a feszültséget, nézd meg, hogy a motor driver-en milyen áramerősség van beállítva, és ha még bírja a tápod, akkor először az ampert emeld meg a dip kapcsolók segítségével. Ha megoldható, akkor inkább iktass közbe egy legalább egy 1:2 áttételt, az a biztos.
Cím: Re:Léptetőmotor
Írta: Tari Gábor Dátum 2021 november 20, 20:08
Írta: Tari Gábor Dátum 2021 november 20, 20:08
Már a max áramon van.
Én is gondoltam az áttételre, csak azt burkolni is kell, macerásabb, mint maga az átétel.
Túlmelegedés nem lesz gond. mert 2 fordulatot megy amotor, utána másodpercekig áll, tartóáram nélkül.
Én is gondoltam az áttételre, csak azt burkolni is kell, macerásabb, mint maga az átétel.
Túlmelegedés nem lesz gond. mert 2 fordulatot megy amotor, utána másodpercekig áll, tartóáram nélkül.
Cím: Re:Léptetőmotor
Írta: szf Dátum 2021 december 19, 11:27
Írta: szf Dátum 2021 december 19, 11:27
Honnan lehet tudni, hogy hány voltos a vezérlő bemenete?
(https://hobbicncforum.hu/uploaded_images/2021/12/tn_n38et4dm7y6cc8p5qg6b_3460.jpg) (https://hobbicncforum.hu/uploaded_images/2021/12/n38et4dm7y6cc8p5qg6b_3460.jpg) (https://hobbicncforum.hu/uploaded_images/2021/12/tn_7ig9kkfdz9qskmtn0vude_3460.jpg) (https://hobbicncforum.hu/uploaded_images/2021/12/7ig9kkfdz9qskmtn0vude_3460.jpg)
(https://hobbicncforum.hu/uploaded_images/2021/12/tn_n38et4dm7y6cc8p5qg6b_3460.jpg) (https://hobbicncforum.hu/uploaded_images/2021/12/n38et4dm7y6cc8p5qg6b_3460.jpg) (https://hobbicncforum.hu/uploaded_images/2021/12/tn_7ig9kkfdz9qskmtn0vude_3460.jpg) (https://hobbicncforum.hu/uploaded_images/2021/12/7ig9kkfdz9qskmtn0vude_3460.jpg)
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2021 december 19, 11:43
Írta: TBS-TEAM Dátum 2021 december 19, 11:43
Rá van írva [#eplus2] +20...48V-ig.
Cím: Re:Léptetőmotor
Írta: szf Dátum 2021 december 19, 11:47
Írta: szf Dátum 2021 december 19, 11:47
Az a táp.[#crazya]
Nekem a Clk kell.
Nekem a Clk kell.
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2021 december 19, 11:57
Írta: TBS-TEAM Dátum 2021 december 19, 11:57
Application: Step motor driver for 2-phase step motors
Supply voltage: 20...48VDC, momentary 52VDC
Motor current/phase: 1.0/1.5/2.0/2.5Aeff; 1.4/2.1/2.8/3.5Apeak
Step resolution: 200/400/800/1600 steps/revolution
Signal triggering: Pulse/direction, opto-decoupled, 5V or 24V
Output signals: Ready, opto coupler
Dimensions: Approximately 79x25x86mm (HxWxD)
Mounting/housing: DIN rail/plastic housing
Features: Low heat generated without forced cooling
Supply voltage: 20...48VDC, momentary 52VDC
Motor current/phase: 1.0/1.5/2.0/2.5Aeff; 1.4/2.1/2.8/3.5Apeak
Step resolution: 200/400/800/1600 steps/revolution
Signal triggering: Pulse/direction, opto-decoupled, 5V or 24V
Output signals: Ready, opto coupler
Dimensions: Approximately 79x25x86mm (HxWxD)
Mounting/housing: DIN rail/plastic housing
Features: Low heat generated without forced cooling
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2021 december 19, 12:04
Írta: D.Laci Dátum 2021 december 19, 12:04
Próbáld ki 5v-tal, ha nem jó vagy instabil, akkor 24v-os... :)
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2021 december 19, 12:15
Írta: dtb Dátum 2021 december 19, 12:15
Csak ezt találtam én is :-)
Cím: Re:Léptetőmotor
Írta: szf Dátum 2021 december 19, 12:31
Írta: szf Dátum 2021 december 19, 12:31
5V-al, 24V-al nem megy.
Szerintem sz.r.
Szerintem sz.r.
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2021 december 19, 12:57
Írta: TBS-TEAM Dátum 2021 december 19, 12:57
Nem olyan biztos az, higy sz.r
Middex K480216A Wall Mounted Step Driver
Type Wall mounted, DIN rail
Principle Bipolar chopper driver (2/4 phase)
Supply voltage Low 20, max. 48VDC
Phase current, rated 1...2.5A adjustable, fixed steps
Step resolution 200 to 1600 steps/revolution
Signal voltage Low -8, rated 5, max. 8V, or low -30, rated 24, max. 30V
Middex K480216A Wall Mounted Step Driver
Type Wall mounted, DIN rail
Principle Bipolar chopper driver (2/4 phase)
Supply voltage Low 20, max. 48VDC
Phase current, rated 1...2.5A adjustable, fixed steps
Step resolution 200 to 1600 steps/revolution
Signal voltage Low -8, rated 5, max. 8V, or low -30, rated 24, max. 30V
Cím: Re:Léptetőmotor
Írta: szf Dátum 2021 december 19, 20:39
Írta: szf Dátum 2021 december 19, 20:39
Meglett a hiba.
Kapcsolóüzemű táp 24Vdc 5A-os.
Raktam egy 470uF 50V-os kondit a tápra és jó lett. Közvetlen 24V-os jelet tudok küldeni a bemenetre.
Sajnos nincs szkópom így nem tudom mi lehet a baja. Mert ez a 470uF szerintem nem kéne .
A táp új, márkás
Kapcsolóüzemű táp 24Vdc 5A-os.
Raktam egy 470uF 50V-os kondit a tápra és jó lett. Közvetlen 24V-os jelet tudok küldeni a bemenetre.
Sajnos nincs szkópom így nem tudom mi lehet a baja. Mert ez a 470uF szerintem nem kéne .
A táp új, márkás
Cím: Re:Léptetőmotor
Írta: Virbo Dátum 2022 május 17, 11:22
Írta: Virbo Dátum 2022 május 17, 11:22
Meghajtó szíjakkal kapcsolatban szeretnék egy kis iránymutatást kérni ha lehet.
Adott egy mechanika egy léptetőmotorral, eredetileg XL 037 jelű hosszú fogasszíjjal és a motoron egy hozzá passzoló szíjtárcsa.
A szíjat (és a motort tárcsástul) cserélni kellett, amit kaptunk helyette az Gates Powergrip LL-XL-037 jelű szíj.
Namost az van, hogy az új szíj nem fekszik el normálisan sem a régi, sem az új tárcsára sem. A tárcsa 31 fogú, kb a palást felétől már a fogak nem a helyükön vannak, hanem a "fogtetők" találkoznak.
Tudtommal ha XL van a szíjon, akkor az egyforma fogosztás meg profilúnak kellene lennie, mégis ha egymás mellé teszem az új xl-037 jelű szíjat és egy másik (a régit, vagy egy másik 280XL jelű végtelenített szíjat), egy olyan 30centi hosszon már látni hogy a fogak nem egymás mellett vannak, hanem az XL-037 "lemarad" a másikhoz képest pár tizednyit.
Ilyenkor mi van, én nézek be valamit nagyon, vagy valamit elcsellóztak a szíjnál?
A készülék gyártója állítja hogy a szíj tuti jó, én is ezt olvasom a neten, de közben meg megy az oboa a készüléknél...[#nemtudom]
Adott egy mechanika egy léptetőmotorral, eredetileg XL 037 jelű hosszú fogasszíjjal és a motoron egy hozzá passzoló szíjtárcsa.
A szíjat (és a motort tárcsástul) cserélni kellett, amit kaptunk helyette az Gates Powergrip LL-XL-037 jelű szíj.
Namost az van, hogy az új szíj nem fekszik el normálisan sem a régi, sem az új tárcsára sem. A tárcsa 31 fogú, kb a palást felétől már a fogak nem a helyükön vannak, hanem a "fogtetők" találkoznak.
Tudtommal ha XL van a szíjon, akkor az egyforma fogosztás meg profilúnak kellene lennie, mégis ha egymás mellé teszem az új xl-037 jelű szíjat és egy másik (a régit, vagy egy másik 280XL jelű végtelenített szíjat), egy olyan 30centi hosszon már látni hogy a fogak nem egymás mellett vannak, hanem az XL-037 "lemarad" a másikhoz képest pár tizednyit.
Ilyenkor mi van, én nézek be valamit nagyon, vagy valamit elcsellóztak a szíjnál?
A készülék gyártója állítja hogy a szíj tuti jó, én is ezt olvasom a neten, de közben meg megy az oboa a készüléknél...[#nemtudom]
Cím: Re:Léptetőmotor
Írta: Virbo Dátum 2022 május 17, 11:26
Írta: Virbo Dátum 2022 május 17, 11:26
A felső a régi XL 037 jelű, alatta az új Gates XL-37
(https://hobbicncforum.hu/uploaded_images/2022/05/tn_56x5xwib9u7w7g7vftxk_2270.jpg) (https://hobbicncforum.hu/uploaded_images/2022/05/56x5xwib9u7w7g7vftxk_2270.jpg) (https://hobbicncforum.hu/uploaded_images/2022/05/tn_yezn8s5jizfft4wys0j88_2270.jpg) (https://hobbicncforum.hu/uploaded_images/2022/05/yezn8s5jizfft4wys0j88_2270.jpg) (https://hobbicncforum.hu/uploaded_images/2022/05/tn_6hqsy2p8yaxwvs29e9d_2270.jpg) (https://hobbicncforum.hu/uploaded_images/2022/05/6hqsy2p8yaxwvs29e9d_2270.jpg) (https://hobbicncforum.hu/uploaded_images/2022/05/tn_9bfdgcnyhb2vxjcqmhye_2270.jpg) (https://hobbicncforum.hu/uploaded_images/2022/05/9bfdgcnyhb2vxjcqmhye_2270.jpg)
(https://hobbicncforum.hu/uploaded_images/2022/05/tn_56x5xwib9u7w7g7vftxk_2270.jpg) (https://hobbicncforum.hu/uploaded_images/2022/05/56x5xwib9u7w7g7vftxk_2270.jpg) (https://hobbicncforum.hu/uploaded_images/2022/05/tn_yezn8s5jizfft4wys0j88_2270.jpg) (https://hobbicncforum.hu/uploaded_images/2022/05/yezn8s5jizfft4wys0j88_2270.jpg) (https://hobbicncforum.hu/uploaded_images/2022/05/tn_6hqsy2p8yaxwvs29e9d_2270.jpg) (https://hobbicncforum.hu/uploaded_images/2022/05/6hqsy2p8yaxwvs29e9d_2270.jpg) (https://hobbicncforum.hu/uploaded_images/2022/05/tn_9bfdgcnyhb2vxjcqmhye_2270.jpg) (https://hobbicncforum.hu/uploaded_images/2022/05/9bfdgcnyhb2vxjcqmhye_2270.jpg)
Cím: Re:Léptetőmotor
Írta: Virbo Dátum 2022 május 17, 11:27
Írta: Virbo Dátum 2022 május 17, 11:27
Helyesen Gates Powergrip LL-XL-37 az új szíj típusa, elnézést.
Cím: Re:Léptetőmotor
Írta: Lpeti11 Dátum 2022 október 04, 18:30
Írta: Lpeti11 Dátum 2022 október 04, 18:30
Üdvöletem.
Valaki tudna segíteni hogy a vezérlőbe menő (Control inputs) jeleket hogy lehet átalakítani mach3 step-dir jelekre?
(https://i.imgur.com/1fg3UQ0.png)
Köszönöm.
Valaki tudna segíteni hogy a vezérlőbe menő (Control inputs) jeleket hogy lehet átalakítani mach3 step-dir jelekre?
(https://i.imgur.com/1fg3UQ0.png)
Köszönöm.
Cím: Re:Léptetőmotor
Írta: Karácsony Sándor Dátum 2022 október 05, 12:35
Írta: Karácsony Sándor Dátum 2022 október 05, 12:35
Üdv,
step=pulse dir=dir enable lehet a gate.Túl kicsi a rajzrészlet .Több adatból több segítségre számíthatsz.
step=pulse dir=dir enable lehet a gate.Túl kicsi a rajzrészlet .Több adatból több segítségre számíthatsz.
Cím: Re:Léptetőmotor
Írta: Lpeti11 Dátum 2022 október 06, 08:48
Írta: Lpeti11 Dátum 2022 október 06, 08:48
Üdvözletem.
A következö 5tengelyes vezérlöt szeretném Mac3
Step- Dir- re kötni.
A Controll inputtal lenne problémám.
Melyik vezetékre köthetném az Enable jelet?
https://7id.xray.aps.anl.gov/internal/hardware/motion/berger-lahr/D550_GB.PDF
Köszönöm.
(https://hobbicncforum.hu/uploaded_images/2022/10/tn_5giphgutp23pf4fvcysku_2799.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/5giphgutp23pf4fvcysku_2799.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/tn_6ufvcesxe8vkm4jwep39k_2799.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/6ufvcesxe8vkm4jwep39k_2799.jpg)
A következö 5tengelyes vezérlöt szeretném Mac3
Step- Dir- re kötni.
A Controll inputtal lenne problémám.
Melyik vezetékre köthetném az Enable jelet?
https://7id.xray.aps.anl.gov/internal/hardware/motion/berger-lahr/D550_GB.PDF
Köszönöm.
(https://hobbicncforum.hu/uploaded_images/2022/10/tn_5giphgutp23pf4fvcysku_2799.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/5giphgutp23pf4fvcysku_2799.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/tn_6ufvcesxe8vkm4jwep39k_2799.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/6ufvcesxe8vkm4jwep39k_2799.jpg)
Cím: Re:Léptetőmotor
Írta: D.Laci Dátum 2022 október 06, 09:15
Írta: D.Laci Dátum 2022 október 06, 09:15
"A következö 5tengelyes vezérlöt szeretném Mac3 "
Ez inkább 5 fázisú léptetőmotor vezérlő lesz.
Ez inkább 5 fázisú léptetőmotor vezérlő lesz.
Cím: Re:Léptetőmotor
Írta: Lpeti11 Dátum 2022 október 06, 09:51
Írta: Lpeti11 Dátum 2022 október 06, 09:51
Űdv.
Elnézést. Férrefogalmaztam.
Elnézést. Férrefogalmaztam.
Cím: Re:Léptetőmotor
Írta: Karácsony Sándor Dátum 2022 október 06, 21:41
Írta: Karácsony Sándor Dátum 2022 október 06, 21:41
Nekem hasonló D900 -as 3 fázisú léptető vezérlőm van.Csak a step és dir bemeneteket használom .Neked 36-70V tápfesz kell.10 vezeték a motorhoz.
Cím: Re:Léptetőmotor
Írta: Lpeti11 Dátum 2022 október 07, 14:19
Írta: Lpeti11 Dátum 2022 október 07, 14:19
Köszönöm.
Cím: Re:Léptetőmotor
Írta: Karácsony Sándor Dátum 2022 október 07, 19:21
Írta: Karácsony Sándor Dátum 2022 október 07, 19:21
Egy breakout bord panellel biztonságosabb.A d550 bemenet igényel előtét ellenállást is .kb
200-330 Ohm 5V esetén . Az optokapuhoz 7- 12 mA a szokásos érték.
(https://hobbicncforum.hu/uploaded_images/2022/10/tn_hzdd92de2j3adxhb7tgdz_483.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/hzdd92de2j3adxhb7tgdz_483.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/tn_dn4mpxn27manxi82jh7q_483.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/dn4mpxn27manxi82jh7q_483.jpg)
200-330 Ohm 5V esetén . Az optokapuhoz 7- 12 mA a szokásos érték.
(https://hobbicncforum.hu/uploaded_images/2022/10/tn_hzdd92de2j3adxhb7tgdz_483.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/hzdd92de2j3adxhb7tgdz_483.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/tn_dn4mpxn27manxi82jh7q_483.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/dn4mpxn27manxi82jh7q_483.jpg)
Cím: Re:Léptetőmotor
Írta: Karácsony Sándor Dátum 2022 október 07, 19:22
Írta: Karácsony Sándor Dátum 2022 október 07, 19:22
Egy breakout bord panellel biztonságosabb.A d550 bemenet igényel előtét ellenállást is .kb
200-330 Ohm 5V esetén . Az optokapuhoz 7- 12 mA a szokásos érték.
(https://hobbicncforum.hu/uploaded_images/2022/10/tn_7exuf23it83d8yb9q3s5_483.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/7exuf23it83d8yb9q3s5_483.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/tn_fuvkc8pn7w2mfcqkw7w0m_483.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/fuvkc8pn7w2mfcqkw7w0m_483.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/tn_zm2mfb98jzt4meg7h5ht_483.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/zm2mfb98jzt4meg7h5ht_483.jpg)
200-330 Ohm 5V esetén . Az optokapuhoz 7- 12 mA a szokásos érték.
(https://hobbicncforum.hu/uploaded_images/2022/10/tn_7exuf23it83d8yb9q3s5_483.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/7exuf23it83d8yb9q3s5_483.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/tn_fuvkc8pn7w2mfcqkw7w0m_483.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/fuvkc8pn7w2mfcqkw7w0m_483.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/tn_zm2mfb98jzt4meg7h5ht_483.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/zm2mfb98jzt4meg7h5ht_483.jpg)
Cím: Re:Léptetőmotor
Írta: sarktibsi Dátum 2022 október 18, 09:32
Írta: sarktibsi Dátum 2022 október 18, 09:32
Üdv mindenkinek. Hamarosan érkeznek BERGER léptetöim+motorok PL: D 930 , D 920.51 , WD3-004
Ha érdekel valakit privátba keressetek.
Keresek a közelben elektromos szakit aki tudna segiteni a léptetők szervok bekötésében huzalozás esetleg omron plc programozásban jártas.
Ha érdekel valakit privátba keressetek.
Keresek a közelben elektromos szakit aki tudna segiteni a léptetők szervok bekötésében huzalozás esetleg omron plc programozásban jártas.
Cím: Re:Léptetőmotor
Írta: sarktibsi Dátum 2022 október 25, 17:39
Írta: sarktibsi Dátum 2022 október 25, 17:39
Valaki esetleg ismeri a BERGER WD3-04-08-tipusú 3f léptetö hajtást?
AZ lenne a kérdésem , hogy az encoderes motort egyszerüen csak rádugom és kész , a hajtás automatikusan felismeri és már zárt hurokban müküködik vagy kell valamit álitani ( kötni ) rajta. És , hogy fogja a hibát jelezni.
Úgyanis eddig encoder nélkül használták.
(https://hobbicncforum.hu/uploaded_images/2022/10/tn_6sw00snuc80pau64vcp8p_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/6sw00snuc80pau64vcp8p_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/tn_n8dkus489qdmu0b7is8pt_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/n8dkus489qdmu0b7is8pt_8178.jpg)
AZ lenne a kérdésem , hogy az encoderes motort egyszerüen csak rádugom és kész , a hajtás automatikusan felismeri és már zárt hurokban müküködik vagy kell valamit álitani ( kötni ) rajta. És , hogy fogja a hibát jelezni.
Úgyanis eddig encoder nélkül használták.
(https://hobbicncforum.hu/uploaded_images/2022/10/tn_6sw00snuc80pau64vcp8p_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/6sw00snuc80pau64vcp8p_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/tn_n8dkus489qdmu0b7is8pt_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2022/10/n8dkus489qdmu0b7is8pt_8178.jpg)
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2023 január 11, 14:16
Írta: ANTAL GÁBOR Dátum 2023 január 11, 14:16
Egy 3f léptetőmotor doksijában találtam egy áram táblázatot . két oszlopa van :RMS és peak .
A peak ( 15 helyen ) 1.73 ( gyök 3 ? ) szorosa az RMS nek
Pl: RMS= 3.00A peak = 5.19A
Eddig úgy tudtam hogy a csúcs érték az gyök 2 szerese az effektív értéknek . Elnyomtatták a táblázatot?
A motor és a driver Berger Lahr ( nem kínai ) [#nemtudom][#nemtudom]
A peak ( 15 helyen ) 1.73 ( gyök 3 ? ) szorosa az RMS nek
Pl: RMS= 3.00A peak = 5.19A
Eddig úgy tudtam hogy a csúcs érték az gyök 2 szerese az effektív értéknek . Elnyomtatták a táblázatot?
A motor és a driver Berger Lahr ( nem kínai ) [#nemtudom][#nemtudom]
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2023 január 11, 14:24
Írta: svejk Dátum 2023 január 11, 14:24
Szerintem az a peak nem az a csúcs amire Te gondolsz...
Arról nem beszélve hogy az említett gyök 2 csak szinusznál igaz, ami itt ugye valami PWM négyszög.
Arról nem beszélve hogy az említett gyök 2 csak szinusznál igaz, ami itt ugye valami PWM négyszög.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2023 január 11, 14:37
Írta: ANTAL GÁBOR Dátum 2023 január 11, 14:37
Ok : az eredeti kártyán a blaska az már gyök kettős szorzót tartalmaz ( Berger D930) pl RMS= 4A peak 5.66A
A doksiban gyök 3 a blaskán gyök 2 [#nemtudom]
A doksiban gyök 3 a blaskán gyök 2 [#nemtudom]
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2023 január 11, 14:53
Írta: svejk Dátum 2023 január 11, 14:53
Mi az a blaska?[#nemtudom]
Még a gugli sem ismeri :)
Még a gugli sem ismeri :)
Cím: Re:Léptetőmotor
Írta: mex Dátum 2023 január 11, 15:15
Írta: mex Dátum 2023 január 11, 15:15
blaska=badiga[#nyes]
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2023 január 11, 15:34
Írta: ANTAL GÁBOR Dátum 2023 január 11, 15:34
Blaska = kb cédula . A feleségem szerint régen a strandon a kabinos adott egy alulapocskát ( blaskát ) amikor lezárta a kabint . A gyárban a raktáros blaskára adta ki a 20*1.5 es menetfúrót az esztergályosnak . A Dunántúlon, Pesten és Miskolcon is használják . De a google nem ismeri...
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2023 január 11, 15:42
Írta: svejk Dátum 2023 január 11, 15:42
Aha!
Mi a raktárosnak bilétát adtunk.
Mi a raktárosnak bilétát adtunk.
Cím: Re:Léptetőmotor
Írta: fektiforg Dátum 2023 január 11, 17:02
Írta: fektiforg Dátum 2023 január 11, 17:02
Mi meg bárcát, Szfvár - Sárbogárd.
Cím: Re:Léptetőmotor
Írta: Lacibácsi Dátum 2023 január 11, 18:41
Írta: Lacibácsi Dátum 2023 január 11, 18:41
Nekem is a bárca ismerős, azzal együtt hogy a másik (régebben használatos) jelentése izgalmasabb[#beka3]
Cím: Re:Léptetőmotor
Írta: hmsuyac94 Dátum 2023 február 05, 10:34
Írta: hmsuyac94 Dátum 2023 február 05, 10:34
Sziasztok!
Van egy MX 3660 3 tengelyes léptetőmotor vezérlőm és hozzá 3 db Nema 23 léptetőmotor (peak current: 4A)
Mach3-mal lépten-nyomon kifagy a program. Ha lekapcsolom a 750W-os frekiváltót, ami a motort hajtja, akkor azonnal kifagy. Ha nem megy a frekiváltó - és teljesen ki van kapcsolva a motor -, akkor is elég gyakran kifagy - vagyis kiáll vészhibára, de nincs hibaleírás megjelenítve.
Arra gondolok, hogy kevés az MX 3660-nak a 400W-os 48V-os táp.
Találkozott már valaki ilyennel?
Válaszokat előre is kösz!
Van egy MX 3660 3 tengelyes léptetőmotor vezérlőm és hozzá 3 db Nema 23 léptetőmotor (peak current: 4A)
Mach3-mal lépten-nyomon kifagy a program. Ha lekapcsolom a 750W-os frekiváltót, ami a motort hajtja, akkor azonnal kifagy. Ha nem megy a frekiváltó - és teljesen ki van kapcsolva a motor -, akkor is elég gyakran kifagy - vagyis kiáll vészhibára, de nincs hibaleírás megjelenítve.
Arra gondolok, hogy kevés az MX 3660-nak a 400W-os 48V-os táp.
Találkozott már valaki ilyennel?
Válaszokat előre is kösz!
Cím: Re:Léptetőmotor
Írta: hmsuyac94 Dátum 2023 február 05, 10:40
Írta: hmsuyac94 Dátum 2023 február 05, 10:40
Vagy még arra gondolok, hogy a frakiváltó és a marómotor kábel ennyire bezavar a léptetőmotoroknak...
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2023 február 15, 09:41
Írta: KBalázs Dátum 2023 február 15, 09:41
Sziasztok!
Váratlan kimenetelû kísérletet végeztem.
Van pár unipoláris régi (NEMA23 méretû) léptetômotorom. Elkezdtem átkötögetni bipolárisra, hogy mai meghajtókkal is használható sebességûek legyenek (tengelyükre húztam szorosan egy bordáskereket, így fixen tartva a rotort ameddig a hátoldala nincs rajta).
Már párat átkötöttem, amikor egy viseltesebb darabnál az jutott eszembe, ha véletlen rosszul kötném be (nehéz volna véletlen benézni, de kíváncsi voltam), azt hogyan venném észre összerakás után.
Tehát az egyik oldali tekercseket keresztbe kötöttem direkt (mintha egy 8 kivezetésest rosszul kötnénk bipolárisra), és összerakva ahhoz hasonlóan viselkedett mint amikor rövidre van zárva az egyik tekercs, ellentart. Nem forgattam sokat (kézzel), talán 1/4 fordulatot se. OK, érezhetô lenne ha rosszul kötném, szétkaptam megint, hogy átkössem jóra.
Na itt jön a meglepetés, ugyanis a motor innentôl még az összes tekercs lekötése után is úgy viselkedik, mint amikor rövidre van zárva a tekercse. Tehát kuka, nem is mozdul meg ha tápot adok neki.
A fizikája érdekelne, mi történhetett? Húztam már szét motort nagyonrég, tudom hogy onnantól nincs ereje, de itt ennek mintha az ellenkezôje történne.
Váratlan kimenetelû kísérletet végeztem.
Van pár unipoláris régi (NEMA23 méretû) léptetômotorom. Elkezdtem átkötögetni bipolárisra, hogy mai meghajtókkal is használható sebességûek legyenek (tengelyükre húztam szorosan egy bordáskereket, így fixen tartva a rotort ameddig a hátoldala nincs rajta).
Már párat átkötöttem, amikor egy viseltesebb darabnál az jutott eszembe, ha véletlen rosszul kötném be (nehéz volna véletlen benézni, de kíváncsi voltam), azt hogyan venném észre összerakás után.
Tehát az egyik oldali tekercseket keresztbe kötöttem direkt (mintha egy 8 kivezetésest rosszul kötnénk bipolárisra), és összerakva ahhoz hasonlóan viselkedett mint amikor rövidre van zárva az egyik tekercs, ellentart. Nem forgattam sokat (kézzel), talán 1/4 fordulatot se. OK, érezhetô lenne ha rosszul kötném, szétkaptam megint, hogy átkössem jóra.
Na itt jön a meglepetés, ugyanis a motor innentôl még az összes tekercs lekötése után is úgy viselkedik, mint amikor rövidre van zárva a tekercse. Tehát kuka, nem is mozdul meg ha tápot adok neki.
A fizikája érdekelne, mi történhetett? Húztam már szét motort nagyonrég, tudom hogy onnantól nincs ereje, de itt ennek mintha az ellenkezôje történne.
Cím: Re:Léptetőmotor
Írta: zsolt123 Dátum 2023 február 15, 09:59
Írta: zsolt123 Dátum 2023 február 15, 09:59
mérd ki az ellenállásokat, utána szerintem okosabbak leszünk
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2023 február 15, 10:05
Írta: KBalázs Dátum 2023 február 15, 10:05
Az ellenállások ugyanazok maradtak, mint a többi (több tucat) azonos motornál.
Cím: Re:Léptetőmotor
Írta: zsolt123 Dátum 2023 február 15, 10:07
Írta: zsolt123 Dátum 2023 február 15, 10:07
nekem a Mach3 akkor szokott megvadulni/akadozni régebben, amikor bekapcsoltam a porszívót :)
nézd át a földeléseket, használj rövidebb, minőségi USB-kábelt (ha a vezérlő USB-s), árnyékolt jelkábeleket.
nézd át a földeléseket, használj rövidebb, minőségi USB-kábelt (ha a vezérlő USB-s), árnyékolt jelkábeleket.
Cím: Re:Léptetőmotor
Írta: zsolt123 Dátum 2023 február 15, 10:09
Írta: zsolt123 Dátum 2023 február 15, 10:09
ez akkor tényleg elég érdekes
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2023 február 15, 12:27
Írta: KBalázs Dátum 2023 február 15, 12:27
Kézzel forgatva olyan mintha felerősödött volna a detent torque (fogazási nyomaték vagy minek nevezzem magyarul), megsokszorozödott volna. Tehát ha egy jó motor egyik tekercsét rövidre zárom akkor ritkábban tart ellent, (talán minden 4. lépést), itt ugyanaz az akadás-sűrűség van mint egy átlag 200 lépésesnél szabadon, de akkora erővel mintha zárlatba volna (de nincs zárlat!). A tekercsek rövidzárása nem változtat érzésre semmit (nem úgy mint a jó motoroknál).
Cím: Re:Léptetőmotor
Írta: Karácsony Sándor Dátum 2023 február 15, 13:29
Írta: Karácsony Sándor Dátum 2023 február 15, 13:29
Test zárlat sincs?
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2023 február 15, 13:31
Írta: KBalázs Dátum 2023 február 15, 13:31
Nincs. Minden elektromos hibát kizártam.
Cím: Re:Léptetőmotor
Írta: Karácsony Sándor Dátum 2023 február 15, 13:56
Írta: Karácsony Sándor Dátum 2023 február 15, 13:56
Talán megvan.A forgórész É-D mágnese fél fogosztású de ha,ez elfordul ... 1.8 fok már sok is.
Cím: Re:Léptetőmotor
Írta: Karácsony Sándor Dátum 2023 február 15, 13:57
Írta: Karácsony Sándor Dátum 2023 február 15, 13:57
Úgyis rossz szét kell szedni.
Cím: Re:Léptetőmotor
Írta: Karácsony Sándor Dátum 2023 február 15, 14:27
Írta: Karácsony Sándor Dátum 2023 február 15, 14:27
Pongyolán fogalmaztam.Itt egy kép.
(https://hobbicncforum.hu/uploaded_images/2023/02/tn_0wve2wj0kmhte8ukqvbp7_483.jpg) (https://hobbicncforum.hu/uploaded_images/2023/02/0wve2wj0kmhte8ukqvbp7_483.jpg)
(https://hobbicncforum.hu/uploaded_images/2023/02/tn_0wve2wj0kmhte8ukqvbp7_483.jpg) (https://hobbicncforum.hu/uploaded_images/2023/02/0wve2wj0kmhte8ukqvbp7_483.jpg)
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2023 február 15, 14:36
Írta: Szalai György Dátum 2023 február 15, 14:36
Áááá... Nem így szokott ez lenni, ahogy a rajzon van.
A két fogazott tárcsa az nem mágnes, csak lemezelt vastest. A két fogazott vastest közé van beragasztva egy mágnesgyűrű.
A két fogazott tárcsa az nem mágnes, csak lemezelt vastest. A két fogazott vastest közé van beragasztva egy mágnesgyűrű.
Cím: Re:Léptetőmotor
Írta: Karácsony Sándor Dátum 2023 február 15, 14:48
Írta: Karácsony Sándor Dátum 2023 február 15, 14:48
Igaz.A kép jobb alsó sarkában lévő részleten a fél fogosztásnyi eltolás látszik.Ha ez megváltozik (elfordul a tengelyen )az nem OK . Erre gondoltam,csak nem fogalmaztam meg jól.
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2023 február 15, 15:58
Írta: KBalázs Dátum 2023 február 15, 15:58
Az szerintem teljesen valószínűtlen hogy a rotor két fele elengedi egymást :) . Nem érte mechanikai behatás az asztalon.
Majd széthúzom holnap, a hosszú M3 csavarokat újra tudom hasznosítani, pont ekkorák kellenek a nyomtatóm extruderébe, arra nem számítottam hogy innen lesznek.
Majd széthúzom holnap, a hosszú M3 csavarokat újra tudom hasznosítani, pont ekkorák kellenek a nyomtatóm extruderébe, arra nem számítottam hogy innen lesznek.
Cím: Re:Léptetőmotor
Írta: mex Dátum 2023 február 15, 16:44
Írta: mex Dátum 2023 február 15, 16:44
Esetleg egy összehasonlító induktivitásmérés egy jó motor tekercsei, és a hibásnak mondott tekercsek között, ha van alkalmas műszer?
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2023 február 15, 17:09
Írta: KBalázs Dátum 2023 február 15, 17:09
Jóhogy. 13.7 mH egy jó még unipol egy ága, a rossz meg 12.5 mH, nem jelentős, az ellenállásuk se egyforma 7.3 és 6.7R.
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2023 február 15, 17:14
Írta: KBalázs Dátum 2023 február 15, 17:14
Átkötötteknek is ennyi (~13 mH) az induktivitása, csak 3.5R az eredőjük, logikusan.
Cím: Re:Léptetőmotor
Írta: mex Dátum 2023 február 15, 17:25
Írta: mex Dátum 2023 február 15, 17:25
Esélyes pár menet zárlata szerintem.
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2023 február 15, 17:37
Írta: KBalázs Dátum 2023 február 15, 17:37
Mind a 4 tekercsen azonosan :)
Cím: Re:Léptetőmotor
Írta: mex Dátum 2023 február 15, 18:05
Írta: mex Dátum 2023 február 15, 18:05
Akkor az "kizárt dolog, mert nem tudom" [#nemtudom]
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2023 február 15, 18:26
Írta: PSoft Dátum 2023 február 15, 18:26
Ehhh...
De hiányzik "valaki" az ilyen esetekre... [#vigyor2]
De hiányzik "valaki" az ilyen esetekre... [#vigyor2]
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2023 február 15, 19:34
Írta: Szalai György Dátum 2023 február 15, 19:34
,,Nem érte mechanikai behatás az asztalon."
És az asztal alatt esetleg? Leesettleg?
Láttunk már csodákat, akár lemezeire hullott forgórészt.
Ha ,,megfőzöd" a motort, elengedhet a ragasztó. Bírja a mágnes, bírja a tekercselőhuzal szigetelése, de lehet, hogy a ragasztó nem.
Lehet, hogy nem a ragasztó engedett, hanem a mágnesen lévő ,,speciális" Ni-Cu-Ni felületkezelés vált le, mert rohad alatta a NdFeB mágnes.
Vagy az az árkategória amiben SmCo mágnes van?
És az asztal alatt esetleg? Leesettleg?
Láttunk már csodákat, akár lemezeire hullott forgórészt.
Ha ,,megfőzöd" a motort, elengedhet a ragasztó. Bírja a mágnes, bírja a tekercselőhuzal szigetelése, de lehet, hogy a ragasztó nem.
Lehet, hogy nem a ragasztó engedett, hanem a mágnesen lévő ,,speciális" Ni-Cu-Ni felületkezelés vált le, mert rohad alatta a NdFeB mágnes.
Vagy az az árkategória amiben SmCo mágnes van?
Cím: Re:Léptetőmotor
Írta: tiggersoft Dátum 2023 február 15, 19:49
Írta: tiggersoft Dátum 2023 február 15, 19:49
Csak tipp, de nem lehet, hogy nem központosan sikerült összerakni?
Cím: Re:Léptetőmotor
Írta: Bencze András Dátum 2023 február 15, 21:23
Írta: Bencze András Dátum 2023 február 15, 21:23
Lemágneseződött - ennyi. Nem szabadott volna a forgót kiszedni.
Cím: Re:Léptetőmotor
Írta: mex Dátum 2023 február 15, 21:30
Írta: mex Dátum 2023 február 15, 21:30
Az a feneség, hogy a forgórész a helyén maradt, és a "detent torque" felerősödött...
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2023 február 15, 22:07
Írta: KBalázs Dátum 2023 február 15, 22:07
Ezek a nyiszi által vagy 8 éve tucatszám eladott kb. 1Nm-es Japan Servo, akár mindent is megélhetett mocik. Nem képvisel számottevő értéket, van több tucat még. Én sosem használtam, eredeti helyükön, gondolom jól hajtották. A leírt jelenségen túl biztosan nem érte más hatás, írtam volna. Holnap kihúzom a rotort, eddig azért nem tettem, hátha ötleteléskor valami kijön, vagy mérni kéll, stb.
Cím: Re:Léptetőmotor
Írta: Karácsony Sándor Dátum 2023 február 15, 23:00
Írta: Karácsony Sándor Dátum 2023 február 15, 23:00
Fantasztikus !mennyi hozzászólást gerjesztett egy nyamvadt kis motor[#zavart2[#nevetes2Szerintem hosszirányúmágnes elcsúszás is lehet.
Cím: Re:Léptetőmotor
Írta: mex Dátum 2023 február 15, 23:18
Írta: mex Dátum 2023 február 15, 23:18
Növelve a hozzászólások számát eggyel: szerintem a forgórész automatikusan helyzeteli magát...
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2023 február 16, 20:07
Írta: KBalázs Dátum 2023 február 16, 20:07
Kihúztam a rotort, (nem volt elcsúszva az állórésztől tengelyirányban) nincs semmi látható anomália. Klasszikus, 4 szekció van, tehát két mágnes, a két-két fogazott résszel, ezek fél fognyit elforgatva, de az azonos pólusok fogazásai egybevágóak. Stabilan összeragasztva. Semmi kosz/rozsda nincs. Visszatolva szinte ugyanolyan mint előtte. Sokéve vételkor egyet széthúztam mert az beázott volt, az papírforma szerint legyengült.
A jelenség furcsasága okán írtam, de ezt ott is írtam hogy nem egy aranyozott szupermotor megmentése a téma.
A jelenség furcsasága okán írtam, de ezt ott is írtam hogy nem egy aranyozott szupermotor megmentése a téma.
Cím: Re:Léptetőmotor
Írta: Karácsony Sándor Dátum 2023 február 16, 20:27
Írta: Karácsony Sándor Dátum 2023 február 16, 20:27
Oké.é-d pólusok kb. egyenlő erejűek?(Bár nem tudom .hogy lehetne -e különböző)!!!!Azt írtad ,hogy tápfeszt adtál rá.Vezérlővel?
Cím: Re:Léptetőmotor
Írta: Karácsony Sándor Dátum 2023 február 16, 20:36
Írta: Karácsony Sándor Dátum 2023 február 16, 20:36
Tehát a tekercsek kezdet-vég sincs felcstélve.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2023 február 16, 21:09
Írta: PSoft Dátum 2023 február 16, 21:09
Ha nem egy "aranyozott szuper motor" és azt írod több darab is van belőle...
Én, már csak kíváncsiságból is...
No meg 'ecce élünk alapon [#vigyor2] végigjátszanám egy még "szűz" másikkal is -lépésről lépésre- ugyanezt a procedúrát.
Legfeljebb a végén, nem egy, hanem két...macskadobálóm lenne. :)
Én, már csak kíváncsiságból is...
No meg 'ecce élünk alapon [#vigyor2] végigjátszanám egy még "szűz" másikkal is -lépésről lépésre- ugyanezt a procedúrát.
Legfeljebb a végén, nem egy, hanem két...macskadobálóm lenne. :)
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2023 február 16, 21:56
Írta: KBalázs Dátum 2023 február 16, 21:56
Bár alapvetően utálok pocsékolni, viszont annyira valószínűtlen ami történt, sanszos hogy megismétlem másikkal. Legfeljebb bekeretezve falra kiteszem, felirattal: "Nem győzök kárt csinálni!" :)
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2023 február 16, 21:58
Írta: KBalázs Dátum 2023 február 16, 21:58
Már a hiba megjelenése után, s csak labortápról egy-egy tekercsére, névlegesnél alacsonyabb áramot. Egy jó ilyenkor leugrani próbál az asztalról, ez meg semmit.
Cím: Re:Léptetőmotor
Írta: Karácsony Sándor Dátum 2023 február 16, 22:07
Írta: Karácsony Sándor Dátum 2023 február 16, 22:07
Feladom maradjon rejtély pont
Cím: Re:Léptetőmotor
Írta: KBalázs Dátum 2023 február 16, 22:08
Írta: KBalázs Dátum 2023 február 16, 22:08
Na, már nem látok telón. Konkrétan lekötöttem az egyik tekercset mind2 oldalt, azaz unipol egy ága maradt.
Nem igazán összekeverhető, ezeket dupla huzallal tekerik, de eltérő zománc-lakk van huzalokon. Tehát tisztán látni hogy melyik a párja, futnak együtt ugyanarra a csévére. Amikor keresztbe kötöttem azt kíváncsiságból, önigazolásból tettem.
Nem igazán összekeverhető, ezeket dupla huzallal tekerik, de eltérő zománc-lakk van huzalokon. Tehát tisztán látni hogy melyik a párja, futnak együtt ugyanarra a csévére. Amikor keresztbe kötöttem azt kíváncsiságból, önigazolásból tettem.
Cím: Re:Léptetőmotor
Írta: Karácsony Sándor Dátum 2023 február 16, 22:11
Írta: Karácsony Sándor Dátum 2023 február 16, 22:11
"KBalázs
Már a hiba megjelenése után, "és előtte? Nem kapott egy nagy áramlöketet?
Már a hiba megjelenése után, "és előtte? Nem kapott egy nagy áramlöketet?
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2023 június 27, 12:01
Írta: ANTAL GÁBOR Dátum 2023 június 27, 12:01
sziasztok !
egy érdekes kérdés: adott egy 2f léptető és egy mai kínai driver ( van rajta "enable " lehetőség. ) A driver megkapja a tápot de az enable optocsatolójának a ledjét is működtetjük . A H hidak a driverban lezárnak OK . De egy külső mechanika elkezdi forgatni a léptetőt ( n= 360 1 /min ) . A forgórészben alkalmazott mágnes miatt a léptető generátoros üzembe kerül, és a tekercseken feszültség jelenik meg . Szabad ennek az üzemállapotnak fennállni vagy nem ?
Szerintem igen ! Indok : Ha elég nagy tápfeszű a driver akkor a beépített és lezárt fetek el kell hogy bírják az indukált feszültséget .
Hogy miért kell az ilyen üzemállatot? Egy szalag tekercselésnél létrejön a külső meghajtás ( a motor szabadon fut), majd a motor a szalagcserénél fog működni ( az fűzi be a szalagot )
egy érdekes kérdés: adott egy 2f léptető és egy mai kínai driver ( van rajta "enable " lehetőség. ) A driver megkapja a tápot de az enable optocsatolójának a ledjét is működtetjük . A H hidak a driverban lezárnak OK . De egy külső mechanika elkezdi forgatni a léptetőt ( n= 360 1 /min ) . A forgórészben alkalmazott mágnes miatt a léptető generátoros üzembe kerül, és a tekercseken feszültség jelenik meg . Szabad ennek az üzemállapotnak fennállni vagy nem ?
Szerintem igen ! Indok : Ha elég nagy tápfeszű a driver akkor a beépített és lezárt fetek el kell hogy bírják az indukált feszültséget .
Hogy miért kell az ilyen üzemállatot? Egy szalag tekercselésnél létrejön a külső meghajtás ( a motor szabadon fut), majd a motor a szalagcserénél fog működni ( az fűzi be a szalagot )
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2023 június 27, 12:26
Írta: svejk Dátum 2023 június 27, 12:26
A FET-ek zárva vannak ugyan de a parazita paralel diódák diódahídként üzemelnek tovább a tápfeszt megemelve.
Ha van fékáramkör vagy eneriaelnyelő a tápban akkor nincs gond, de pl. a régi MSD vezérlőkben csak egy egyszerű kis teljesítményű -talán 36 V-os- supressor volt a tápon azok erre dróttá válással szoktak reagálni.
Ha van fékáramkör vagy eneriaelnyelő a tápban akkor nincs gond, de pl. a régi MSD vezérlőkben csak egy egyszerű kis teljesítményű -talán 36 V-os- supressor volt a tápon azok erre dróttá válással szoktak reagálni.
Cím: Re:Léptetőmotor
Írta: gyorkecs Dátum 2023 június 27, 14:36
Írta: gyorkecs Dátum 2023 június 27, 14:36
Kisméretű hobbi CNC-ken látni gyakran kézi kereket a motorok végén, de az azért korántsem 360 1/min, és kisebb a "bekapcsolási idő" is. Egy, a szóban forgó kínai driver feláldozásával lehet próbát tenni, az is lehet hogy bírja, és az is amit Svejk jósol. Esetleg egy mechanikus szabadonfutót birok elképzelni, akkor biztosan nem lehet panasza a drivernek. https://engineering.stackexchange.com/questions/2934/how-can-i-get-a-stepper-motor-to-engage-with-a-freely-spinning-wheel
Hasonló ehhez, vagy görgős, ahogy jobban adja a hely.
Hasonló ehhez, vagy görgős, ahogy jobban adja a hely.
Cím: Re:Léptetőmotor
Írta: Szalai György Dátum 2023 június 27, 16:56
Írta: Szalai György Dátum 2023 június 27, 16:56
Mekkora a léptetőmotor által indukált üresjárati feszültség n= 360 1 /min esetén?
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2023 június 27, 21:33
Írta: ANTAL GÁBOR Dátum 2023 június 27, 21:33
Pont holnap tervezem megmérni eszterga padon . DE amit Svejk ír az csak akkor problémás ha a DC busz feszültségénél nagyobb az egyenirányított indukált feszültség . Legyen driver tápfesze pl 40 V Dc Ha a 360 1/min nél kisebb az egyenirányított feszültség akkor a parazita graetz diódái ki sem nyílnak ( Ueff = 28 V ig nincs baj )
Nem hinném hogy 360 al forgatva létrejön a 28 V . De egy primitív fékchopper sem akadály .
Pont a szabadonfutót akarjuk kispórolni ( a gyári kapható szabadonfutó bőven több mint a driver , esetleg egy átalakított autós a generátoroknál alkalmazott hosszbordás szíjjas szabadonfutó szóba jöhet . Sajnos Trabant szabadonfutót már nem lehet kapni ( pedig milyen jó lenne )
Nem hinném hogy 360 al forgatva létrejön a 28 V . De egy primitív fékchopper sem akadály .
Pont a szabadonfutót akarjuk kispórolni ( a gyári kapható szabadonfutó bőven több mint a driver , esetleg egy átalakított autós a generátoroknál alkalmazott hosszbordás szíjjas szabadonfutó szóba jöhet . Sajnos Trabant szabadonfutót már nem lehet kapni ( pedig milyen jó lenne )
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2023 június 27, 22:22
Írta: TBS-TEAM Dátum 2023 június 27, 22:22
Mivel a léptetőmotorok 3-6V közötti fázisfeszültséggel
mennek nem fogja elérni a 10V feszültség szintet 360F/percnél.
mennek nem fogja elérni a 10V feszültség szintet 360F/percnél.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2023 június 28, 06:09
Írta: ANTAL GÁBOR Dátum 2023 június 28, 06:09
Én sokkal nagyobb feszültséget várok . 2018 ban publikáltam ebben a topikban egy mérési eredményt ( 5711 es bejegyzés ) . Ott ( műterhelve ) is elértem a 9 V ot és alig forgott a léptecs . Gondolom egy ideig lineáris a karakterisztika .
Attól tartok hogy még a 28 V ot is el fogom érni . No majd kiderül ....
Attól tartok hogy még a 28 V ot is el fogom érni . No majd kiderül ....
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2023 június 28, 07:28
Írta: TBS-TEAM Dátum 2023 június 28, 07:28
Léptetőmotor paraméterek (https://www.cncpart.hu/custom/cncpart/image/data/srattached/7202b388202c021411c6a98c5f048abf_57HS76-3004A08-D21_adatlap.pdf)
1 kép üresen.
2 kép hajtással.
3-4 kép üresen.
(https://hobbicncforum.hu/uploaded_images/2023/06/tn_n5akutpsftb50n3w8ip3_3344.jpg) (https://hobbicncforum.hu/uploaded_images/2023/06/n5akutpsftb50n3w8ip3_3344.jpg) (https://hobbicncforum.hu/uploaded_images/2023/06/tn_k59i9vg3nfbtem5nhfj_3344.jpg) (https://hobbicncforum.hu/uploaded_images/2023/06/k59i9vg3nfbtem5nhfj_3344.jpg) (https://hobbicncforum.hu/uploaded_images/2023/06/tn_fgbp6pshkzy4ipgqvsv_3344.jpg) (https://hobbicncforum.hu/uploaded_images/2023/06/fgbp6pshkzy4ipgqvsv_3344.jpg) (https://hobbicncforum.hu/uploaded_images/2023/06/tn_xspc0qkmz7d0swt3dvu_3344.jpg) (https://hobbicncforum.hu/uploaded_images/2023/06/xspc0qkmz7d0swt3dvu_3344.jpg)
1 kép üresen.
2 kép hajtással.
3-4 kép üresen.
(https://hobbicncforum.hu/uploaded_images/2023/06/tn_n5akutpsftb50n3w8ip3_3344.jpg) (https://hobbicncforum.hu/uploaded_images/2023/06/n5akutpsftb50n3w8ip3_3344.jpg) (https://hobbicncforum.hu/uploaded_images/2023/06/tn_k59i9vg3nfbtem5nhfj_3344.jpg) (https://hobbicncforum.hu/uploaded_images/2023/06/k59i9vg3nfbtem5nhfj_3344.jpg) (https://hobbicncforum.hu/uploaded_images/2023/06/tn_fgbp6pshkzy4ipgqvsv_3344.jpg) (https://hobbicncforum.hu/uploaded_images/2023/06/fgbp6pshkzy4ipgqvsv_3344.jpg) (https://hobbicncforum.hu/uploaded_images/2023/06/tn_xspc0qkmz7d0swt3dvu_3344.jpg) (https://hobbicncforum.hu/uploaded_images/2023/06/xspc0qkmz7d0swt3dvu_3344.jpg)
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2023 június 28, 08:01
Írta: ANTAL GÁBOR Dátum 2023 június 28, 08:01
Más dolog a tápláló feszültség és más dolog a generátoros üzem által indukált üresjárási feszültség . Mint említettem 2018 ban már csináltam egy mérést és ott kis fordulaton is sokkal nagyobb feszültséget kaptam . ( lapozz vissza !! ) Ma megismétlem a mérést de te is meggyőződhetsz róla : egy akkus fúrógép tokmányába fogjál be egy lépetőnek a tengelyét és pörgesd meg , majd a kapott feszültséget mérd meg egy multiméterrel.Korrekt lesz a mérés ha egy lézeres fordulatszámmérővel megméred a fordulatszámot is.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2023 június 28, 08:06
Írta: ANTAL GÁBOR Dátum 2023 június 28, 08:06
Csak a korábbi írásodra és a paraméterekre koncentráltam . Látom már mértél is ( gondolom a fordulatszám van kijelezve a kis esztergán ) Ttehát megállapítható hogy a motor 2-6 V os tápfesze nem jellemzi az üresjárati indukált feszültséget
Cím: Re:Léptetőmotor
Írta: klaviokft Dátum 2023 június 28, 14:57
Írta: klaviokft Dátum 2023 június 28, 14:57
Megérdeklődtem a Leadshine állásfoglalását. A mérnök a tertósan fennálló "dinamo üzem" esetén a motor károsodását említette elsődlegesen.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2023 június 28, 19:27
Írta: ANTAL GÁBOR Dátum 2023 június 28, 19:27
Köszönöm hogy rákérdeztél . Érteni persze nem értem . A léptető egy sokpólusú szinkronmotor . Ha nem terhelem ( mert üresjárásban fut ) akkor indukálódik a feszültség . Áram nem folyik , tehát a beépített mágnes nincs ellengerjesztve , nem melegszik , akkor mi a fene baja lehetne ? A szigetelés azért kibírhat néhányszor 10 voltot .
Ma megnéztem egy 4 Nm es Jenauer motort . 46 mV / fordulat az indukált feszültség Tehát 500 as fordulaton mintegy 23 V képződött . Hát az talán nem üt át ...
A kis kínai feleslegesen védi a mundért ( gondolom nem is érti )
Ma megnéztem egy 4 Nm es Jenauer motort . 46 mV / fordulat az indukált feszültség Tehát 500 as fordulaton mintegy 23 V képződött . Hát az talán nem üt át ...
A kis kínai feleslegesen védi a mundért ( gondolom nem is érti )
Cím: Re:Léptetőmotor
Írta: klaviokft Dátum 2023 június 29, 05:59
Írta: klaviokft Dátum 2023 június 29, 05:59
Bocsánat kicsit szűkszavura sikerúlt. Az én kérdésem a Leadshine felé a vezérlőre gyakorolt hatás volt. Tehát bekapcsolt, de nem vezérelt ( tartásban)levő vezérlő melletti gemerátor üzem.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2023 június 29, 07:09
Írta: ANTAL GÁBOR Dátum 2023 június 29, 07:09
úgy már mindjárt más . Svejk szépen megfogalmazta . Ha az enable vel lezárjuk a végfok fetjeit attól még ott marad a Drain source között a dióda. A 4 dióda egy graetz hidat alkot . Ha jól megpörgetem a motort akkor az indukált váltó feszültség egyenirányítás után a Dc buszra kerül (amennyiben ki tudnak nyílni a diódák , tehát a váltó fesznek nagyobbnak kell lennie ) Ilyenkor komoly baj keletkezhet mert a védelmi supresszor életbe lép de a kondi is eldurranhat és a fetek is a névlegesnél nagyobb feszültségre kerülnek és átüthetnek .
Ez ellen egyszerű méréssel lehet védekezni , ha ismerem a váltó fesz nagyságát akkor előre meg tudom mondani hogy ez az állapot létre jöhet e . ( célszerű nagy feszültségű drivert választani ) De TBS-team is adott egy ötletet : egy egyszerű relés leválasztás a generátoros üzemre . Nálunk nincs probléma mert időben jól elkülönül a generátoros üzem a valóditól ( van idő a relét kapcsolni )
Ez ellen egyszerű méréssel lehet védekezni , ha ismerem a váltó fesz nagyságát akkor előre meg tudom mondani hogy ez az állapot létre jöhet e . ( célszerű nagy feszültségű drivert választani ) De TBS-team is adott egy ötletet : egy egyszerű relés leválasztás a generátoros üzemre . Nálunk nincs probléma mert időben jól elkülönül a generátoros üzem a valóditól ( van idő a relét kapcsolni )
Cím: Re:Léptetőmotor
Írta: Gaal Andras Dátum 2023 július 05, 08:48
Írta: Gaal Andras Dátum 2023 július 05, 08:48
Sziasztok !
A tanácsotokat kérem.
A képen látható motor és vezérlő omron plc-vel hajtható?
Köszönettel várom válaszotok
Üdv
András
(https://hobbicncforum.hu/uploaded_images/2023/07/tn_bu4z0cywy8yt8ixpchnf_6708.jpg) (https://hobbicncforum.hu/uploaded_images/2023/07/bu4z0cywy8yt8ixpchnf_6708.jpg) (https://hobbicncforum.hu/uploaded_images/2023/07/tn_4v2fyyhx64cp3beagy_6708.jpg) (https://hobbicncforum.hu/uploaded_images/2023/07/4v2fyyhx64cp3beagy_6708.jpg) (https://hobbicncforum.hu/uploaded_images/2023/07/tn_wgiingyq7xe5qnu7m2gd6_6708.jpg) (https://hobbicncforum.hu/uploaded_images/2023/07/wgiingyq7xe5qnu7m2gd6_6708.jpg)
A tanácsotokat kérem.
A képen látható motor és vezérlő omron plc-vel hajtható?
Köszönettel várom válaszotok
Üdv
András
(https://hobbicncforum.hu/uploaded_images/2023/07/tn_bu4z0cywy8yt8ixpchnf_6708.jpg) (https://hobbicncforum.hu/uploaded_images/2023/07/bu4z0cywy8yt8ixpchnf_6708.jpg) (https://hobbicncforum.hu/uploaded_images/2023/07/tn_4v2fyyhx64cp3beagy_6708.jpg) (https://hobbicncforum.hu/uploaded_images/2023/07/4v2fyyhx64cp3beagy_6708.jpg) (https://hobbicncforum.hu/uploaded_images/2023/07/tn_wgiingyq7xe5qnu7m2gd6_6708.jpg) (https://hobbicncforum.hu/uploaded_images/2023/07/wgiingyq7xe5qnu7m2gd6_6708.jpg)
Cím: Re:Léptetőmotor
Írta: onagy Dátum 2023 július 05, 15:54
Írta: onagy Dátum 2023 július 05, 15:54
Ha a PLC-nek van CAN-bus kártyája/interfésze, akkor igen.
O.
O.
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2023 július 05, 15:55
Írta: TBS-TEAM Dátum 2023 július 05, 15:55
A PLC-nek Can bus csatlakozóval kell rendelkeznie
onnantól csak programozás kérdése. [#eplus2]
onnantól csak programozás kérdése. [#eplus2]
Cím: Re:Léptetőmotor
Írta: sarktibsi Dátum 2023 július 05, 20:51
Írta: sarktibsi Dátum 2023 július 05, 20:51
Nekem is van ilyen léptető hajtásom , plusz Omron PLC-ém is van ( több tipus ) , salynos időm még nem volt vele foglalkozni.
De ha jól tudom van step-dir bemenete is , igy egy tranzisztoros plc-vel egyszerüen hajtható. ( nyilt hurok )
(https://hobbicncforum.hu/uploaded_images/2023/07/tn_q6tc9fzeqhnvtyn23t563_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2023/07/q6tc9fzeqhnvtyn23t563_8178.jpg)
De ha jól tudom van step-dir bemenete is , igy egy tranzisztoros plc-vel egyszerüen hajtható. ( nyilt hurok )
(https://hobbicncforum.hu/uploaded_images/2023/07/tn_q6tc9fzeqhnvtyn23t563_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2023/07/q6tc9fzeqhnvtyn23t563_8178.jpg)
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2023 július 05, 21:07
Írta: svejk Dátum 2023 július 05, 21:07
A manuálba beleolvasva úgy látom ez sem egy "gyere cipó hamm bekaplak" szerkezet. :)
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2023 július 05, 21:22
Írta: TBS-TEAM Dátum 2023 július 05, 21:22
Tényleg van CN5 bemeneten STEP/DIR. csatlakozása.
Tud +-10V analogot is.
Can bus
RS485
Tud +-10V analogot is.
Can bus
RS485
Cím: Re:Léptetőmotor
Írta: sarktibsi Dátum 2023 július 05, 21:56
Írta: sarktibsi Dátum 2023 július 05, 21:56
Vagy analóg modullal is le lehetne probálni. ( zárt hurok )
Ha eljutok odáig , letesztelem inverterrel ( szinkron vagy aszinkron motor ) , analóg szervóval , vagy az SD328-al.
Igy elég a relés PLC is.
(https://hobbicncforum.hu/uploaded_images/2023/07/tn_xkhvish9v9nbz4njm37f_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2023/07/xkhvish9v9nbz4njm37f_8178.jpg)
Ha eljutok odáig , letesztelem inverterrel ( szinkron vagy aszinkron motor ) , analóg szervóval , vagy az SD328-al.
Igy elég a relés PLC is.
(https://hobbicncforum.hu/uploaded_images/2023/07/tn_xkhvish9v9nbz4njm37f_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2023/07/xkhvish9v9nbz4njm37f_8178.jpg)
Cím: Re:Léptetőmotor
Írta: nadas Dátum 2023 augusztus 18, 10:32
Írta: nadas Dátum 2023 augusztus 18, 10:32
Sziasztok,
Van egy saját építésű 3 tengelyes marógépem, megközelítőleg 3 éve használom, de az utóbbi időben lépésvesztések jelentkeztek viszont csak az X tengelyen.
A szoftveres hibára gyanakszom, mert minden mozgó részt felújítottam az elmúlt hónapban az X tengelyhez kapcsolódóan (golyósórsó lineárok, kocsik).Kézzel hajtva akadálymentesen, könnyedén, csendesen mozog. JOG módban tesztelve, több óra után is visszaáll tökéletesen ugyanarra a X0 pontra.
Csak progam módban jelentkezik.Post processzort nem frissítettem.
Az a baj, hogy random jelentkezik a hiba előjel nélkül.
Még építési fázisban volt, hogy lépést vesztett egy-egy tengely, de az izolálható,látványos volt.
Amit tudni kell, azóta van a jelenség, mióta sajnos le kellett cserélni a PC-t, így újra lett konfigolva a Mach,(minden setup, adat, stb elveszett). + Board csere (Nousun NVEMV2 ETH)
Találkozott már valaki ilyen hibával? Ha igen milyen beállítás javíthat a problémámon?
Hogyan lehet megállapítani hogy a szoftveres beállítás vagy valami zavar a gond?
Jó hogy van egy ilyen gép itthon, de megbízhatatlan... ez bosszantó.
Minden segítséget,javaslatot köszönök előre is.
Van egy saját építésű 3 tengelyes marógépem, megközelítőleg 3 éve használom, de az utóbbi időben lépésvesztések jelentkeztek viszont csak az X tengelyen.
A szoftveres hibára gyanakszom, mert minden mozgó részt felújítottam az elmúlt hónapban az X tengelyhez kapcsolódóan (golyósórsó lineárok, kocsik).Kézzel hajtva akadálymentesen, könnyedén, csendesen mozog. JOG módban tesztelve, több óra után is visszaáll tökéletesen ugyanarra a X0 pontra.
Csak progam módban jelentkezik.Post processzort nem frissítettem.
Az a baj, hogy random jelentkezik a hiba előjel nélkül.
Még építési fázisban volt, hogy lépést vesztett egy-egy tengely, de az izolálható,látványos volt.
Amit tudni kell, azóta van a jelenség, mióta sajnos le kellett cserélni a PC-t, így újra lett konfigolva a Mach,(minden setup, adat, stb elveszett). + Board csere (Nousun NVEMV2 ETH)
Találkozott már valaki ilyen hibával? Ha igen milyen beállítás javíthat a problémámon?
Hogyan lehet megállapítani hogy a szoftveres beállítás vagy valami zavar a gond?
Jó hogy van egy ilyen gép itthon, de megbízhatatlan... ez bosszantó.
Minden segítséget,javaslatot köszönök előre is.
Cím: Re:Léptetőmotor
Írta: szabo janko Dátum 2023 augusztus 18, 11:51
Írta: szabo janko Dátum 2023 augusztus 18, 11:51
Én ugyan igy jártam . Végül a max előtolást kellett visszább veni a motor konfigban és azóta nem csinálja. Egyébbként úgy jelenkezett a hiba mintha akadna valami az axison.
Cím: Re:Léptetőmotor
Írta: makait Dátum 2023 október 31, 17:47
Írta: makait Dátum 2023 október 31, 17:47
Üdv mindenkinek
Nagyon kezdő vagyok a témában. Szándékomban áll vásárolni egy, az alábbi linken található léptetőmotort a hozzá tartozó vezérlővel. Egy esztergagép elötolását szeretném megoldani vele. A kérdésem az lenne hogy ezt milyen tápegységgel kell megtáplálni? Elég egy 42V-os trafó egyenirányítva, vagy egy stabilizált tápegységgel kell meghajtani?
https://eur.vevor.com/dc-stepper-motor-c_11221/nema34-12nm-closed-loop-hybrid-servo-motor-stepper-motor-205mm-6a-2phase-p_010367219430
Nagyon kezdő vagyok a témában. Szándékomban áll vásárolni egy, az alábbi linken található léptetőmotort a hozzá tartozó vezérlővel. Egy esztergagép elötolását szeretném megoldani vele. A kérdésem az lenne hogy ezt milyen tápegységgel kell megtáplálni? Elég egy 42V-os trafó egyenirányítva, vagy egy stabilizált tápegységgel kell meghajtani?
https://eur.vevor.com/dc-stepper-motor-c_11221/nema34-12nm-closed-loop-hybrid-servo-motor-stepper-motor-205mm-6a-2phase-p_010367219430
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2023 október 31, 19:02
Írta: TBS-TEAM Dátum 2023 október 31, 19:02
Elegendő egy 42V/2A trafó egyenirányító graetz +4700-10000uF kondi.
Cím: Re:Léptetőmotor
Írta: makait Dátum 2023 október 31, 19:07
Írta: makait Dátum 2023 október 31, 19:07
Köszönöm. Ezek vannak is itthon.
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2023 október 31, 20:10
Írta: dtb Dátum 2023 október 31, 20:10
Az a 2A igen vékonynak tűnik... 4A minimum, de inkább 6...
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2023 október 31, 20:12
Írta: dtb Dátum 2023 október 31, 20:12
...sőt. Ott is van az oildalon a motor paramétereknél:
【MAIN PARAMETERS】- Motor has torque 12N.m, contin uous current 6A. Shaft Length: 3.8cm(1.5"), Shaft Width: 1.5cm(0.59"). DC Resistance(±10%): 0.8Ω, Phase Inductance(±20%): 6mH, Insulation Resistance: 100MOhm(500VDC).
【MAIN PARAMETERS】- Motor has torque 12N.m, contin uous current 6A. Shaft Length: 3.8cm(1.5"), Shaft Width: 1.5cm(0.59"). DC Resistance(±10%): 0.8Ω, Phase Inductance(±20%): 6mH, Insulation Resistance: 100MOhm(500VDC).
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2023 október 31, 21:15
Írta: TBS-TEAM Dátum 2023 október 31, 21:15
A motor 6A 5V-on x2 fázissal is 60W
42Vx2A=84W bőven belefér. [#eplus2]
42Vx2A=84W bőven belefér. [#eplus2]
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2023 október 31, 22:39
Írta: jani300 Dátum 2023 október 31, 22:39
Egy butuska kérdésem lenne .
A léptető ugye impulzus vezérelt eszköz .
Elektronikának kellene figyelnie az áramot vagy a feszültséget , esetleg mindkettőt .
Én úgy gondolom ha kialakult a megfelelő áram ,lekapcsol .
A kérdés hogyan is van ez ? Ha esetleg valaki veszi a fáradságot és még ideje is van egy egyszerűbb válaszra .
Na most a bonyibb válasz sem gond ,hátha megértem .
Követtem itt régebben a léptetős dolgokat , de a megvalósításig eddig még nem jutottam el .
A léptető ugye impulzus vezérelt eszköz .
Elektronikának kellene figyelnie az áramot vagy a feszültséget , esetleg mindkettőt .
Én úgy gondolom ha kialakult a megfelelő áram ,lekapcsol .
A kérdés hogyan is van ez ? Ha esetleg valaki veszi a fáradságot és még ideje is van egy egyszerűbb válaszra .
Na most a bonyibb válasz sem gond ,hátha megértem .
Követtem itt régebben a léptetős dolgokat , de a megvalósításig eddig még nem jutottam el .
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2023 november 01, 07:39
Írta: PSoft Dátum 2023 november 01, 07:39
Egy leírás, még a Fórumunk hőskorából... (https://archiv.hobbycnc.hu/CNC/H1/H1Tuning.htm)
Hátha ez, segít valamit. [#wave]
Hátha ez, segít valamit. [#wave]
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2023 november 01, 08:04
Írta: TBS-TEAM Dátum 2023 november 01, 08:04
A léptető motort nem impulzussal vezéreljük.
A pozició tartásához állandó feszültség kell a tekercsekre amit a vezérlő biztosít.
Több féle léptetési mód van amiben a vezérlő a tekercsekre
kapcsolt áramokkal/feszültségekkel hajtja végre a lépéseket.
Pozició tartásnál a vezérlő csökkenti a motoráramot.
Egyébként a motort amikor magára hagyod (kikapcsolod a tápfeszültséget), akkor megpróbál a legközelebbi teljes lépés pozícióba fordulni. Tehát a féllépés, vagy mégkisebb pozíció nem stabil. Erre a program tervezésekor figyelni kell...ene.
(https://hobbicncforum.hu/uploaded_images/2023/11/tn_jjk4kapqz239i95izc28n_3344.gif) (https://hobbicncforum.hu/uploaded_images/2023/11/jjk4kapqz239i95izc28n_3344.gif) (https://hobbicncforum.hu/uploaded_images/2023/11/tn_bb4ihsd3tcfnhfgk7hd45_3344.gif) (https://hobbicncforum.hu/uploaded_images/2023/11/bb4ihsd3tcfnhfgk7hd45_3344.gif) (https://hobbicncforum.hu/uploaded_images/2023/11/tn_5dbv5f8u55tnv6a2hiqe_3344.gif) (https://hobbicncforum.hu/uploaded_images/2023/11/5dbv5f8u55tnv6a2hiqe_3344.gif)
A pozició tartásához állandó feszültség kell a tekercsekre amit a vezérlő biztosít.
Több féle léptetési mód van amiben a vezérlő a tekercsekre
kapcsolt áramokkal/feszültségekkel hajtja végre a lépéseket.
Pozició tartásnál a vezérlő csökkenti a motoráramot.
Egyébként a motort amikor magára hagyod (kikapcsolod a tápfeszültséget), akkor megpróbál a legközelebbi teljes lépés pozícióba fordulni. Tehát a féllépés, vagy mégkisebb pozíció nem stabil. Erre a program tervezésekor figyelni kell...ene.
(https://hobbicncforum.hu/uploaded_images/2023/11/tn_jjk4kapqz239i95izc28n_3344.gif) (https://hobbicncforum.hu/uploaded_images/2023/11/jjk4kapqz239i95izc28n_3344.gif) (https://hobbicncforum.hu/uploaded_images/2023/11/tn_bb4ihsd3tcfnhfgk7hd45_3344.gif) (https://hobbicncforum.hu/uploaded_images/2023/11/bb4ihsd3tcfnhfgk7hd45_3344.gif) (https://hobbicncforum.hu/uploaded_images/2023/11/tn_5dbv5f8u55tnv6a2hiqe_3344.gif) (https://hobbicncforum.hu/uploaded_images/2023/11/5dbv5f8u55tnv6a2hiqe_3344.gif)
Cím: Re:Léptetőmotor
Írta: jani300 Dátum 2023 november 01, 08:22
Írta: jani300 Dátum 2023 november 01, 08:22
Köszönöm a válaszokat !
Cím: Re:Léptetőmotor
Írta: zsolt123 Dátum 2023 november 01, 10:53
Írta: zsolt123 Dátum 2023 november 01, 10:53
Léptetőmotort hajtani legszebben fázisban eltolt színuszos feszültséggel lehetne (ezt próbálják közelíteni PWM-mel a vezérlők). Minél inkább eltérünk ettől, és minél jobban közelítünk a négyszögjeles hajtáshoz, annál nagyobb tranzienseket termelnek a tekercsinduktivitások, alacsony fordulatszámoknál egyenetlen járást és rezgéseket, magasabbaknál meg lépésvesztéseket okozva. Kalkulálni kell továbbá a megmozgatott tömegek (a léptetőmotor saját forgórésze plusz a terhelés) tehetetlenségi nyomatékával, ezért tervezni kell a hajtásban a gyorsulásokat/lassulásokat is.
Cím: Re:Léptetőmotor
Írta: zsolt123 Dátum 2023 november 01, 10:59
Írta: zsolt123 Dátum 2023 november 01, 10:59
"A pozició tartásához állandó feszültség kell a tekercsekre amit a vezérlő biztosít."
Még ez sem feltétlenül igaz. Closed-loopban lehet csökkentesi álló helyzetben a feszültséget (ha nincs külső erőhatás), és csak akkor növelni, ha elkezd változni a pozíció. Így sokkal kevésbé melegszik a motor.
Még ez sem feltétlenül igaz. Closed-loopban lehet csökkentesi álló helyzetben a feszültséget (ha nincs külső erőhatás), és csak akkor növelni, ha elkezd változni a pozíció. Így sokkal kevésbé melegszik a motor.
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2023 november 01, 11:37
Írta: TBS-TEAM Dátum 2023 november 01, 11:37
Akkor döndsd már el kell-e feszültség hozzá vagy nem? [#zavart2]
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2023 november 01, 14:25
Írta: Vetesi75 Dátum 2023 november 01, 14:25
A léptetőmotornál törekedni kell az áramgenerátoros meghajtásra (alapvetően áramvezérelt eszköz). A max. meghajtó feszültséget szinte csak a vezérlő és a motor szigetelése korlátozza. Vezérlőjel (illetve tápegység) szempontjából a legrosszabb pillanatnyi eshetőség, amikor még a tekercsinduktivítás miatt a feszültség a maximum érték közelében van és az áramkorlátozás még éppen nem lép működésbe. Ez a jelenség ismétlődően a léptetési frekvenciától függően akár tartósan is fennállhat, alulméretezett tápegységeknél nem kicsi bosszúságot okozva a megmagyarázhatatlan lépésvesztések kapcsán. (Az impulzusszélesség-modulált PWM meghajtás csak egy csodaszer a vezérlő veszteségeinek a csökkentésére, különben az analóg áramgenerátoros vezérlő az igazi - csak a hatásfoka az mélyen a béka alatt van...) Sajnos az állandó szögsebesség szempontjából a kétfázisú szinuszos meghajtás sem megfelelő - ez akkoriban a "néhai" Tibor45 fórumtárs által ki is lett tárgyalva - a jelalak konkrétan motorfüggő.
Cím: Re:Léptetőmotor
Írta: zsolt123 Dátum 2023 november 01, 15:57
Írta: zsolt123 Dátum 2023 november 01, 15:57
Szerintem érdemes rajta hagyni valamekkora feszültséget, hogy olyan könnyen ne billenjen át. De a legfaszányosabb az lenne tartásban, hogy rövidre zárjuk a tekercskivezetéseket. Ingyé is van, meg tart is. :) Nem tudom, létezik-e ilyen vezérlő.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2023 november 02, 06:59
Írta: svejk Dátum 2023 november 02, 06:59
Álló helyzetben a rövidre zárt tekercsben nem folyik áram tehát nem is tart.
Majd ha elkezded kimozdítani akkor kezd indukálodni a tekercsben az áram és ekkor lesz ellenelektromotoros erö, de ugye ekkor már nem áll motor.
Ergo a rövidre zárt tekercsü léptetömotort szép lassan ki tudod forgatni a helyzetéből, míg a külső árammal gerjesztett áll mint a cövek a saját tulajdonságain belül.
Majd ha elkezded kimozdítani akkor kezd indukálodni a tekercsben az áram és ekkor lesz ellenelektromotoros erö, de ugye ekkor már nem áll motor.
Ergo a rövidre zárt tekercsü léptetömotort szép lassan ki tudod forgatni a helyzetéből, míg a külső árammal gerjesztett áll mint a cövek a saját tulajdonságain belül.
Cím: Re:Léptetőmotor
Írta: sarktibsi Dátum 2023 november 02, 19:50
Írta: sarktibsi Dátum 2023 november 02, 19:50
Adott 4db 3-fázisú léptető motor ( a nagyobaknál van egy ötödik is 325V ) látszólag egyformák , de ha jól megnézzük más feszültséget igényelnek közben a nyomatékuk egyforma.
Mi lehet ennek az oka?
Én ara gondolok , hogy nagy távolságok esetén 10-20-30 méter , vagy magas fordulatszám esetén a nagyobb feszültségűt kell alkalmazni. ( 230 V )
Valakinek van gyakorlati tapasztalata?
(https://hobbicncforum.hu/uploaded_images/2023/11/tn_ipsbq6actpxs0m4g9dpe_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2023/11/ipsbq6actpxs0m4g9dpe_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2023/11/tn_i7qhdyfi7g5hp8dud2i_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2023/11/i7qhdyfi7g5hp8dud2i_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2023/11/tn_pzshx9pmk6kachq3vccbk_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2023/11/pzshx9pmk6kachq3vccbk_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2023/11/tn_a7kqvmtunh39fqdqwci4_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2023/11/a7kqvmtunh39fqdqwci4_8178.jpg)
Mi lehet ennek az oka?
Én ara gondolok , hogy nagy távolságok esetén 10-20-30 méter , vagy magas fordulatszám esetén a nagyobb feszültségűt kell alkalmazni. ( 230 V )
Valakinek van gyakorlati tapasztalata?
(https://hobbicncforum.hu/uploaded_images/2023/11/tn_ipsbq6actpxs0m4g9dpe_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2023/11/ipsbq6actpxs0m4g9dpe_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2023/11/tn_i7qhdyfi7g5hp8dud2i_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2023/11/i7qhdyfi7g5hp8dud2i_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2023/11/tn_pzshx9pmk6kachq3vccbk_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2023/11/pzshx9pmk6kachq3vccbk_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2023/11/tn_a7kqvmtunh39fqdqwci4_8178.jpg) (https://hobbicncforum.hu/uploaded_images/2023/11/a7kqvmtunh39fqdqwci4_8178.jpg)
Cím: Re:Léptetőmotor
Írta: sarktibsi Dátum 2023 november 02, 19:52
Írta: sarktibsi Dátum 2023 november 02, 19:52
A 40V-os kimaradt.
Cím: Re:Léptetőmotor
Írta: zsolt123 Dátum 2023 november 02, 21:19
Írta: zsolt123 Dátum 2023 november 02, 21:19
persze. az elmélet így helyes. a gyakorlatban viszont egy csomó alkalmazásnál elegendő lehet. próbálgattam :)
Cím: Re:Léptetőmotor
Írta: Robsy1 Dátum 2024 január 23, 09:42
Írta: Robsy1 Dátum 2024 január 23, 09:42
Aki ismer, az tudja, hogy az egyik kedvenc témám a CNC motorhajtások kinematikai és dinamikai vizsgálata, bemérése.
Vannak új fejleményeim, ugyanis sikerült egy olyan útmérő rendszert kidolgozni, ami akár 300 kHz-vel mintavételez, és elemez. Csodás és valóságos világ tárul így elénk egy egyenesvonalú vagy körmozgás bemérése kapcsán.
A mostani új méréseim is megerősítették, amit már a régebbiek kapcsán is tapasztaltam, hogy sajnos iszonyatos nagy minőségi különbségek vannak a pozícióbeállás tekintetében vezérlő/motor/mechanikai terhelés láncolatban.
Ha majd megismeritek ezt a világot, ráébredtek, micsoda hazugságban, tévhitben tartanak benneteket általában a step/dir CNC vezérlők, azaz mennyire nem igaz az akár tized mikronnal kijelzett csicsa szovtveres aktuális pozíció ablak értéke.
És hogy miért fontos egy ilyen mérés?
Akinek fokozott pontossági igényei vannak gyártáskor vagy csak úgy érdekli az objektív műszaki valóság, tény, annak alapvető, hogy a forgácsoláskor a szerszám a lehetőleg a legrövidett és legkorrektebb pályán jusson el A pontból B-be. Mert sajnos ha közben összevissza "kóvályog, lengedez", annak méret és felületi érdesség nyoma marad a munkadarabon. Arról már nem is beszélek, hogy ha baj van az útfüggvénnyel, akkor nagy baj van a sebességgel, gyorsulással is, hiszen ezek egymástól elválaszthatatlanok, az egyikből adódik a másik. A kapcsolat közük pedig a deriválás, vagy integrálás.
Vannak új fejleményeim, ugyanis sikerült egy olyan útmérő rendszert kidolgozni, ami akár 300 kHz-vel mintavételez, és elemez. Csodás és valóságos világ tárul így elénk egy egyenesvonalú vagy körmozgás bemérése kapcsán.
A mostani új méréseim is megerősítették, amit már a régebbiek kapcsán is tapasztaltam, hogy sajnos iszonyatos nagy minőségi különbségek vannak a pozícióbeállás tekintetében vezérlő/motor/mechanikai terhelés láncolatban.
Ha majd megismeritek ezt a világot, ráébredtek, micsoda hazugságban, tévhitben tartanak benneteket általában a step/dir CNC vezérlők, azaz mennyire nem igaz az akár tized mikronnal kijelzett csicsa szovtveres aktuális pozíció ablak értéke.
És hogy miért fontos egy ilyen mérés?
Akinek fokozott pontossági igényei vannak gyártáskor vagy csak úgy érdekli az objektív műszaki valóság, tény, annak alapvető, hogy a forgácsoláskor a szerszám a lehetőleg a legrövidett és legkorrektebb pályán jusson el A pontból B-be. Mert sajnos ha közben összevissza "kóvályog, lengedez", annak méret és felületi érdesség nyoma marad a munkadarabon. Arról már nem is beszélek, hogy ha baj van az útfüggvénnyel, akkor nagy baj van a sebességgel, gyorsulással is, hiszen ezek egymástól elválaszthatatlanok, az egyikből adódik a másik. A kapcsolat közük pedig a deriválás, vagy integrálás.
Cím: Re:Léptetőmotor
Írta: sarktibsi Dátum 2024 január 23, 09:59
Írta: sarktibsi Dátum 2024 január 23, 09:59
Én az elmozdulást a Yaskawa szervókkal ( 17 bit ) pontosan le tudom ellenőrizni nagyon egyszerű a motor tengelyét 0-pontra állítom , majd a vezérlőn kiadok egy mozgás parancsot , Driver kijelzője pontosan fogja mutatni az elmozdulás mértékét.
Az én hajtásom max 65535-fele tud bontani egy kört , tehát ha 5:65535=0.0000762951 mm
5 a golyósorsó emelkedése , nekem ez bőven megfelel.
De van más mérési módszerem is.
Az én hajtásom max 65535-fele tud bontani egy kört , tehát ha 5:65535=0.0000762951 mm
5 a golyósorsó emelkedése , nekem ez bőven megfelel.
De van más mérési módszerem is.
Cím: Re:Léptetőmotor
Írta: Robsy1 Dátum 2024 január 23, 10:24
Írta: Robsy1 Dátum 2024 január 23, 10:24
Amikor a motorod tengelye A potból elfordult B-be, a drivered kijelzője csak arra jó, hogy az állandósult állapotban éppen mutat valamit, de hogy közben mi történt, fogalmad sincs. A két pont közötti út eseményeket csak ilyen mélyreható, gyors mérőrendszerrel tudod nyomonkövetni, megfigyelni, letesztelni.
Szervohajtás esetén így igen nagy szerepe van az adott mechanikához történő optimális illesztésről, különös tekintettel a J-re, és a PID körök helyes paraméterezése, beállítása.
Azt se felejtsed el, hogy a világ analóg (annak ellenére, hogy körül vesz minket mindenféle digitális "kütyü"), persze ha te csak másodpercenként vizsgálódsz benne, akkor könnyű életed van, és boldog ember vagy, és minden szép és jó. Csak sajnos Tőled függetlenül az helyzet, hogy két egész másodperc közt pl. van egymillió időpont (ha "csak" mikroszekundumos felbontással nézem az idő múlását), ahol éppen a motorod tengely pozíciója, így a CNC géped tengelye is van.
Így könnyen beláthatod, hogy ezekről a valós pozíció eseményekről nem tudhatsz néhány led kijelzőre alapozva szinte semmit, legfeljebb hiszel valamit.
Szervohajtás esetén így igen nagy szerepe van az adott mechanikához történő optimális illesztésről, különös tekintettel a J-re, és a PID körök helyes paraméterezése, beállítása.
Azt se felejtsed el, hogy a világ analóg (annak ellenére, hogy körül vesz minket mindenféle digitális "kütyü"), persze ha te csak másodpercenként vizsgálódsz benne, akkor könnyű életed van, és boldog ember vagy, és minden szép és jó. Csak sajnos Tőled függetlenül az helyzet, hogy két egész másodperc közt pl. van egymillió időpont (ha "csak" mikroszekundumos felbontással nézem az idő múlását), ahol éppen a motorod tengely pozíciója, így a CNC géped tengelye is van.
Így könnyen beláthatod, hogy ezekről a valós pozíció eseményekről nem tudhatsz néhány led kijelzőre alapozva szinte semmit, legfeljebb hiszel valamit.
Cím: Re:Léptetőmotor
Írta: Robsy1 Dátum 2024 január 27, 08:37
Írta: Robsy1 Dátum 2024 január 27, 08:37
A lehető legegyszerűbb eset az, amikor csak egy step út/idő eseményeit kezdjük feltárni, és elgondolkodni ezen.
Felvetődik máris egy kérdés. Mi értelme, hatása van ebben az esetben a step/dir CNC vezérlő motor tuning, axis setup ablakaiban megadott sebesség és gyorsulás értékeknek? Segítek, SEMMI.[#csodalk][#conf][#nyes]
Felvetődik máris egy kérdés. Mi értelme, hatása van ebben az esetben a step/dir CNC vezérlő motor tuning, axis setup ablakaiban megadott sebesség és gyorsulás értékeknek? Segítek, SEMMI.[#csodalk][#conf][#nyes]
Cím: Re:Léptetőmotor
Írta: Topi69 Dátum 2024 március 13, 09:55
Írta: Topi69 Dátum 2024 március 13, 09:55
Sziasztok,
leírom itt is a tapasztalatomat valakinek hátha segíteni fog.
CW8060-as léptetőmotor vezérlőket építettem be a marógépem 8.7 Nm-es motorjaihoz.
Egy hétig próbáltam életre kelteni a motorokat, de semmi!!!
Aztán megtaláltam a mellékelt képen olvasható bejegyzést 2013.-ból. (Az én alkatrészeim is kb 10 éve vannak a szekrényben...)
Megcseréltem a CW és a CP kivezetéseket és minden működik!
(...a vezérlőn lévő feliratok fordítva lettek rányomtatva...)
(https://hobbicncforum.hu/uploaded_images/2024/03/tn_xf4j3d6dh2j6nn2zf6pf_5086.jpg) (https://hobbicncforum.hu/uploaded_images/2024/03/xf4j3d6dh2j6nn2zf6pf_5086.jpg)
leírom itt is a tapasztalatomat valakinek hátha segíteni fog.
CW8060-as léptetőmotor vezérlőket építettem be a marógépem 8.7 Nm-es motorjaihoz.
Egy hétig próbáltam életre kelteni a motorokat, de semmi!!!
Aztán megtaláltam a mellékelt képen olvasható bejegyzést 2013.-ból. (Az én alkatrészeim is kb 10 éve vannak a szekrényben...)
Megcseréltem a CW és a CP kivezetéseket és minden működik!
(...a vezérlőn lévő feliratok fordítva lettek rányomtatva...)
(https://hobbicncforum.hu/uploaded_images/2024/03/tn_xf4j3d6dh2j6nn2zf6pf_5086.jpg) (https://hobbicncforum.hu/uploaded_images/2024/03/xf4j3d6dh2j6nn2zf6pf_5086.jpg)
Cím: Re:Léptetőmotor
Írta: Robsy1 Dátum 2024 március 13, 13:19
Írta: Robsy1 Dátum 2024 március 13, 13:19
A 8.7 Nm-es motorjaidnak mi a típuszáma, ha nem titok?
Mert egy ilyen motor M/n jelleggörbéje elég meredeken zuhan már 300 rpm körül, ez neked nem okoz gondot?
Mert egy ilyen motor M/n jelleggörbéje elég meredeken zuhan már 300 rpm körül, ez neked nem okoz gondot?
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2024 március 13, 16:11
Írta: ANTAL GÁBOR Dátum 2024 március 13, 16:11
Pont tegnap nézegettem egy klaviós motort. nekem szimpatikus volt ( 70 volton )
https://www.klavio.hu/custom/klavio/image/data/srattached/0f6e811a23816e4a6102b0e61a0c5c9e_86CM85.JPG
https://www.klavio.hu/custom/klavio/image/data/srattached/0f6e811a23816e4a6102b0e61a0c5c9e_86CM85.JPG
Cím: Re:Léptetőmotor
Írta: Robsy1 Dátum 2024 március 18, 17:34
Írta: Robsy1 Dátum 2024 március 18, 17:34
A Hobby vagy akár ipari jellegű CNC gépeiteknél sokan használtok léptetőmotoros hajtást.
Azt viszont már elég kevesen tudják, hogy ezen hajtás elektronikáknak van egy bekapcsolási HOME alapállapota, ami a microstep beállítások és controller IC típus függvénye. Ezt az állapotot egy LED is kijelezheti, ha van ilyen H pozíció outputja a vezérlőnek.
Ha nincs, azokhoz a vezérlőkhöz kifejlesztettem egy kis figyelő áramkört, ami a tekercs gerjesztési állapotok függvényében kijelzi a H pontokat.
Ez azért lehet fontos, mert nem kell "szórakozni, játszadozni" feleslgesen a ref. pont felvétellel, és nagy fokú biztonság érzetet ad a megmunkálási ciklusoknál, hiszen már egyetlen step jel eltérést (ami vezérlő program hibából is adódhat) is egyből a LED jelzés alapján észrevehetünk. Azaz reggel amikor bekapcsolojuk a gépünket és este amikor kikapcsoljuk elégedettek lehetünk, mert a H pozíció ugyanaz maradt. Természetesen ez a mérés csak relatív digitális elvű, de annak a valószínűsége, hogy éppen pontosan egy póluspárral eltolt azonos mágneses mezőt mutasson a LED (és ezáltal "becsapjon") az minimális.
A vezérlő bizonyos ablakaiban úgyis szinte állandóan hazudozik nektek, azt meg gond nélkül el is hiszitek.[#vigyor2]
Majd a Robsy weboldalra is felkerül ez az új kis fejlesztésem a legközelebbi frissítéskor. Én egyébként 30 éve kihasználom ezt a visszajelzést, nagyon hasznos dolog még vezérlő program íráskor, fejlesztéskor is az abszolut pozíció konvergencia (kezdő és végpont koordináta azonosság) letesztelésére.
Azt viszont már elég kevesen tudják, hogy ezen hajtás elektronikáknak van egy bekapcsolási HOME alapállapota, ami a microstep beállítások és controller IC típus függvénye. Ezt az állapotot egy LED is kijelezheti, ha van ilyen H pozíció outputja a vezérlőnek.
Ha nincs, azokhoz a vezérlőkhöz kifejlesztettem egy kis figyelő áramkört, ami a tekercs gerjesztési állapotok függvényében kijelzi a H pontokat.
Ez azért lehet fontos, mert nem kell "szórakozni, játszadozni" feleslgesen a ref. pont felvétellel, és nagy fokú biztonság érzetet ad a megmunkálási ciklusoknál, hiszen már egyetlen step jel eltérést (ami vezérlő program hibából is adódhat) is egyből a LED jelzés alapján észrevehetünk. Azaz reggel amikor bekapcsolojuk a gépünket és este amikor kikapcsoljuk elégedettek lehetünk, mert a H pozíció ugyanaz maradt. Természetesen ez a mérés csak relatív digitális elvű, de annak a valószínűsége, hogy éppen pontosan egy póluspárral eltolt azonos mágneses mezőt mutasson a LED (és ezáltal "becsapjon") az minimális.
A vezérlő bizonyos ablakaiban úgyis szinte állandóan hazudozik nektek, azt meg gond nélkül el is hiszitek.[#vigyor2]
Majd a Robsy weboldalra is felkerül ez az új kis fejlesztésem a legközelebbi frissítéskor. Én egyébként 30 éve kihasználom ezt a visszajelzést, nagyon hasznos dolog még vezérlő program íráskor, fejlesztéskor is az abszolut pozíció konvergencia (kezdő és végpont koordináta azonosság) letesztelésére.
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2024 március 18, 18:38
Írta: TBS-TEAM Dátum 2024 március 18, 18:38
Másképpen látom ezt a léptetős poziciósdit.
Egyébként a léptetőmotort amikor magára hagyod (kikapcsolod a tápfeszültséget), akkor megpróbál a legközelebbi teljes lépés pozícióba fordulni. Tehát a féllépés, vagy mégkisebb pozíció nem stabil ha megszünik a tápfeszűltség.
Erre a program tervezésekor figyelni kell...ene.
A vezérlők meg nem emlékeznek, hogy éppen milyen mikrostep pozicióban kapcsoltuk ki.
Ezért kell Home poziciót felvenni minden bekapcsolás után, és aki nem teszi meg az ne csodálkozzon az eredményen.
Egyébként a léptetőmotort amikor magára hagyod (kikapcsolod a tápfeszültséget), akkor megpróbál a legközelebbi teljes lépés pozícióba fordulni. Tehát a féllépés, vagy mégkisebb pozíció nem stabil ha megszünik a tápfeszűltség.
Erre a program tervezésekor figyelni kell...ene.
A vezérlők meg nem emlékeznek, hogy éppen milyen mikrostep pozicióban kapcsoltuk ki.
Ezért kell Home poziciót felvenni minden bekapcsolás után, és aki nem teszi meg az ne csodálkozzon az eredményen.
Cím: Re:Léptetőmotor
Írta: Robsy1 Dátum 2024 március 18, 18:47
Írta: Robsy1 Dátum 2024 március 18, 18:47
Bölcsebb maradtál volna, ha semmit nem írsz.
Bocs, de a szövegedből kiderült, alap dolgokkal nem vagy tisztába egy léptetőmotoros hajtás kapcsán.
Bocs, de a szövegedből kiderült, alap dolgokkal nem vagy tisztába egy léptetőmotoros hajtás kapcsán.
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2024 március 18, 18:50
Írta: TBS-TEAM Dátum 2024 március 18, 18:50
Akkor szerinted ha 1 egézs lépést 32 felé osztok és eléptetem a motort 2/32 lépésre és kikapcsolom a vezérlést a motor úgy marad?
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2024 március 18, 18:54
Írta: PSoft Dátum 2024 március 18, 18:54
Melyik nem igaz, a három állítás közül? [#nemtudom]
1-
2-
3-
1-
IdézEgyébként a léptetőmotort amikor magára hagyod (kikapcsolod a tápfeszültséget), akkor megpróbál a legközelebbi teljes lépés pozícióba fordulni.
2-
IdézTehát a féllépés, vagy mégkisebb pozíció nem stabil ha megszünik a tápfeszűltség.
3-
IdézA vezérlők meg nem emlékeznek, hogy éppen milyen mikrostep pozicióban kapcsoltuk ki.
Cím: Re:Léptetőmotor
Írta: Robika37 Dátum 2024 március 18, 18:54
Írta: Robika37 Dátum 2024 március 18, 18:54
Kedves Tibor !
Kérlek világosíts fel .Jól gondolom vagy sem egy 200 lépés/fordulatos léptetőmotor kikapcsoláskor az aktuális pozicióban marad, bekapcsoláskor a vezérlőn beállított lépésszám határozza meg , hogy a tartómódban gerjesztett tekercsek mozdulnak vagy sem ? Nézd el kérlek ha nagyon pongyolán fogalmaztam, végső soron ez egy hobby fórum.
Kérlek világosíts fel .Jól gondolom vagy sem egy 200 lépés/fordulatos léptetőmotor kikapcsoláskor az aktuális pozicióban marad, bekapcsoláskor a vezérlőn beállított lépésszám határozza meg , hogy a tartómódban gerjesztett tekercsek mozdulnak vagy sem ? Nézd el kérlek ha nagyon pongyolán fogalmaztam, végső soron ez egy hobby fórum.
Cím: Re:Léptetőmotor
Írta: Robsy1 Dátum 2024 március 18, 19:58
Írta: Robsy1 Dátum 2024 március 18, 19:58
Igen, ahogyan írod, egyfelől igen a "vezérlőn beállított lépésszám határozza meg".
Másodszor pedig az, hogy a kikapcsolási motor tengely szögpozíció a Home pozícióhoz képest hol volt (azonos volt vele, vagy eltérő, erről nem írtál semmit).
Harmadszor pedig a gyártó cég dönti el, és közli veled a H fázishelyzet pontot meghajtó részletesebb leírásában.
A kétfázisú léptetőmotor vezérlőknél a gyártók két féle kitüntetett Home pontot szoktak megvalósítani.
1. A tekercs maximális áram és B tekercs nulla áram (pl. egyes Toshiba vezérlőknél van ez).
2. A tekercsáram = B tekercsáram = maximális áram * 0.7071 (pl. egyes Leadshine vezérlőknél van ez).
Másodszor pedig az, hogy a kikapcsolási motor tengely szögpozíció a Home pozícióhoz képest hol volt (azonos volt vele, vagy eltérő, erről nem írtál semmit).
Harmadszor pedig a gyártó cég dönti el, és közli veled a H fázishelyzet pontot meghajtó részletesebb leírásában.
A kétfázisú léptetőmotor vezérlőknél a gyártók két féle kitüntetett Home pontot szoktak megvalósítani.
1. A tekercs maximális áram és B tekercs nulla áram (pl. egyes Toshiba vezérlőknél van ez).
2. A tekercsáram = B tekercsáram = maximális áram * 0.7071 (pl. egyes Leadshine vezérlőknél van ez).
Cím: Re:Léptetőmotor
Írta: KoLa Dátum 2024 március 18, 20:49
Írta: KoLa Dátum 2024 március 18, 20:49
Még az is számít hogy áramszünet esetén melyik irányban halt meg, a kottyanásos hajtásnál mindig újra kell hitelesíteni.
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2024 március 19, 09:36
Írta: TBS-TEAM Dátum 2024 március 19, 09:36
Léptető motor teszt, hogyan viselkedik a tápegység kikapcsolása és visszakapcsolása esetén.
Miért is kell HOME poziciót felvenni minden bekapcsolás után.[#eplus2]
(https://hobbicncforum.hu/uploaded_images/2024/03/tn_9adp5ugtixpmwpyjumiqv_3344.jpg) (https://hobbicncforum.hu/uploaded_images/2024/03/9adp5ugtixpmwpyjumiqv_3344.jpg)
Miért is kell HOME poziciót felvenni minden bekapcsolás után.[#eplus2]
(https://hobbicncforum.hu/uploaded_images/2024/03/tn_9adp5ugtixpmwpyjumiqv_3344.jpg) (https://hobbicncforum.hu/uploaded_images/2024/03/9adp5ugtixpmwpyjumiqv_3344.jpg)
Cím: Re:Léptetőmotor
Írta: Robsy1 Dátum 2024 március 19, 13:41
Írta: Robsy1 Dátum 2024 március 19, 13:41
Még van esélyed sok tanulással, gondolkozással, hogy szépen lassan megértsed a 6617-es eredeti bejegyzésem műszaki lényegét, hiszen a videóid is a stepmotor hajtások Home pozícióképességét prezentálják.
Csak te még mindig nem érted, hogyan is működik igazán egy léptetőmotor és a hozzátartozó motorhajtás, ámde erre a téves tudásodra, hitedre építve vicsorgó ikonozol szokásod szerint. A kettő együtt durva dolog, mert az hogy nem értesz valamit, azzal semmi bajom nincs, segítek mindenkinek, így neked is a műszaki VALÓSÁG megértésben. De hogy a téveszméidre, téves tudásodra építve vicsorogsz, no ez a kettő így együtt SOK![#ejnye1]
Csak te még mindig nem érted, hogyan is működik igazán egy léptetőmotor és a hozzátartozó motorhajtás, ámde erre a téves tudásodra, hitedre építve vicsorgó ikonozol szokásod szerint. A kettő együtt durva dolog, mert az hogy nem értesz valamit, azzal semmi bajom nincs, segítek mindenkinek, így neked is a műszaki VALÓSÁG megértésben. De hogy a téveszméidre, téves tudásodra építve vicsorogsz, no ez a kettő így együtt SOK![#ejnye1]
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2024 március 19, 14:50
Írta: TBS-TEAM Dátum 2024 március 19, 14:50
Sajnálom, hogy a videoban akár 1-2 egész lépést is elugrik a léptetőmotor random, de ez a valóság.
Fogadd el, hogy a video nem hazudik.
A léptetőmotor ismeri a fizikát, mi emberek meg csak próbáljuk megérteni több kevesebb sikerrel.
Nem akartam leírni a következőt, mert nem akarok senkit sem megbántani, mert nem szokásom.
6617 írásodból én ezt szürtem le:
Sajnálom, hogy te 30+ év fejlesztés kutatás után arra a következtetésre jutottál, hogy nem kell a léptetőmotoros hajtást a bekapcsolás után HOME pozicióba küldeni a hazudós vezérléssel, hanem csak egy LED visszajelzést kell figyelni ki/bekapcsolásnál és minden hepi, mert a led nem hazudik.
Még jó, hogy minden más gyártó aki léptetőmotorokat használ az mindig a bekapcsolás után HOME poziciót felveteti, hogy ne legyen ebből hibás lépés.
Fogadd el, hogy a video nem hazudik.
A léptetőmotor ismeri a fizikát, mi emberek meg csak próbáljuk megérteni több kevesebb sikerrel.
Nem akartam leírni a következőt, mert nem akarok senkit sem megbántani, mert nem szokásom.
6617 írásodból én ezt szürtem le:
Sajnálom, hogy te 30+ év fejlesztés kutatás után arra a következtetésre jutottál, hogy nem kell a léptetőmotoros hajtást a bekapcsolás után HOME pozicióba küldeni a hazudós vezérléssel, hanem csak egy LED visszajelzést kell figyelni ki/bekapcsolásnál és minden hepi, mert a led nem hazudik.
Még jó, hogy minden más gyártó aki léptetőmotorokat használ az mindig a bekapcsolás után HOME poziciót felveteti, hogy ne legyen ebből hibás lépés.
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2024 március 19, 14:58
Írta: PSoft Dátum 2024 március 19, 14:58
Sajnos, hibás a mérőösszeállításod! :(
Egy lyukkal többet kellet volna faragnod a kartonpapírra.
A papír valamelyik sarkába kellett volna egy 5 mm-es piros LED-et integrálnod, amely random, de végtelen csicsás felvillanásokal jelezne...valamit.
Egy lyukkal többet kellet volna faragnod a kartonpapírra.
A papír valamelyik sarkába kellett volna egy 5 mm-es piros LED-et integrálnod, amely random, de végtelen csicsás felvillanásokal jelezne...valamit.
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2024 március 19, 15:03
Írta: TBS-TEAM Dátum 2024 március 19, 15:03
Sajnálom, hogy nem gondoltam a LED-es jelzésre, csak 10 percet szántam a teszt elkészítésére.[#kacsint]
Cím: Re:Léptetőmotor
Írta: PSoft Dátum 2024 március 19, 15:38
Írta: PSoft Dátum 2024 március 19, 15:38
Idéz...csak 10 percet szántam a teszt elkészítésére.
Itt a baj!!!
Hol mérhető a Te 10 perced egy élet munkájához? [#kacsint]
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2024 március 19, 15:53
Írta: TBS-TEAM Dátum 2024 március 19, 15:53
Nem tudom 6 óra alatt 124-en nézték meg, de ki mit szűrt le belőle az nem tudható.[#kacsint]
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2024 március 19, 16:13
Írta: ANTAL GÁBOR Dátum 2024 március 19, 16:13
Én is megnéztem ( kb 3 szor) Ugyancsak legalább 3 szor elolvastam Tibor alap beírását . Lehet hogy rosszul következtetek , valószínű azoknak való a kütyü akik olyan nagy munkát csinálnak amit este abbahagynak , reggel pedig folytatják.
Ha este ég a led és reggel is akkor home olás nélkül folytatható a munka .(?) De mi van ha úgy áll meg a léptecs hogy nem ég a led , vagy reggel nem világít ? Akkorbizony gebasz van .
Az is érdekes hogy az elv is el van árulva ( tehát utánépíthető ) Leadshine vezérlőknél Ia = Ib = Imax*gyök 2
Persze az sem elhanyagolható hogy este / reggel égő led esetén sem atombiztos a dolog .
Szerintem Tibor nem sokat fog eladni a kütyüből
Ha este ég a led és reggel is akkor home olás nélkül folytatható a munka .(?) De mi van ha úgy áll meg a léptecs hogy nem ég a led , vagy reggel nem világít ? Akkorbizony gebasz van .
Az is érdekes hogy az elv is el van árulva ( tehát utánépíthető ) Leadshine vezérlőknél Ia = Ib = Imax*gyök 2
Persze az sem elhanyagolható hogy este / reggel égő led esetén sem atombiztos a dolog .
Szerintem Tibor nem sokat fog eladni a kütyüből
Cím: Re:Léptetőmotor
Írta: Robsy1 Dátum 2024 március 19, 16:14
Írta: Robsy1 Dátum 2024 március 19, 16:14
Javaslom, hogy ismét fussál neki, és végre értsed meg, hogyan néz ki egy 2 fázisú léptetőmotor forgó mágneses erőtér rendszere a szinusz szögfüggvények és a microstep beállításokkal meghatározva. Utána majd a 3, 5, 7, ... fázisúakkal is megismerkedhetsz. Ekkor majd rájössz, mi is az a bizonyos Home pont, amire minden valamire való vezérlő odafigyel bekapcsoláskor, és adott esetben ki is vezeti ezt a kitüntetett H output állapotot.
Ha pedig nincs kivezetve (attól még hajtáson belül ez a logika létezik), akkor jön az én ötletem (6617 bejegyzés), fejlesztésem, ami minden motorhajtásnál alkalmazható a leírt előnyeivel.
És kérlek, végre szakítsál azzal a gyakorlatoddal, hogy amihez nem értesz, arról ne is nyilatkozzál, előtte inkább kérdezzél, tanuljál, értsed meg a valóságot, és utána kezdjél el vitázni. Én is így indultam 40 évvel ezelőtt a motorhajtás fejlesztéseim kapcsán, nem olyan nehéz ám ez a folyamat, csak akarnod kellene, ha mélyebben érdekel egy téma. Ja és van még egy "titok": reális tudás szint felmérés, önismeret magadról, és amiről csak hiszel valamit, nem vagy a műszaki téma mélyebb szakértője, vagy nincs biztos tudásod, arról nagy magabiztossággal ne írj inkább semmit, mert ez a legrosszabb verzió.
Ha pedig nincs kivezetve (attól még hajtáson belül ez a logika létezik), akkor jön az én ötletem (6617 bejegyzés), fejlesztésem, ami minden motorhajtásnál alkalmazható a leírt előnyeivel.
És kérlek, végre szakítsál azzal a gyakorlatoddal, hogy amihez nem értesz, arról ne is nyilatkozzál, előtte inkább kérdezzél, tanuljál, értsed meg a valóságot, és utána kezdjél el vitázni. Én is így indultam 40 évvel ezelőtt a motorhajtás fejlesztéseim kapcsán, nem olyan nehéz ám ez a folyamat, csak akarnod kellene, ha mélyebben érdekel egy téma. Ja és van még egy "titok": reális tudás szint felmérés, önismeret magadról, és amiről csak hiszel valamit, nem vagy a műszaki téma mélyebb szakértője, vagy nincs biztos tudásod, arról nagy magabiztossággal ne írj inkább semmit, mert ez a legrosszabb verzió.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2024 március 19, 16:17
Írta: ANTAL GÁBOR Dátum 2024 március 19, 16:17
(gyök 2)/2
Cím: Re:Léptetőmotor
Írta: Robsy1 Dátum 2024 március 19, 16:24
Írta: Robsy1 Dátum 2024 március 19, 16:24
34 éve épp eleget eladtam (saját fejlesztésű motorhajtásaimban is benne vannak), imádják, akik megértették és nap mint nap használják, elég csak rápillantani program start előtt erre a picike LED-es VALÓS motorállapotot visszajelzőre. Persze ha te a csicsa képernyődnek hiszel, ami ugye elszakít az igazi valóságtól, az a te bajod.
Lehet hogy negyedszer, vagy ötödször is el kellene még neked is olvasnod az eredeti beírásomat.:)
Lehet hogy negyedszer, vagy ötödször is el kellene még neked is olvasnod az eredeti beírásomat.:)
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2024 március 19, 16:26
Írta: ANTAL GÁBOR Dátum 2024 március 19, 16:26
Tovább gondolkodtam a kütyün. Tehát Tibor este kikapcsolás előtt kézi lépetetéssel kigyújtja a ledet és akkor utána kapcsolja ki a gépet
Cím: Re:Léptetőmotor
Írta: ywathzay Dátum 2024 március 19, 16:47
Írta: ywathzay Dátum 2024 március 19, 16:47
Mi történik ha nem világít a led? Mármint mi is folyamat folytatása ebben az esetben?
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2024 március 19, 16:49
Írta: ANTAL GÁBOR Dátum 2024 március 19, 16:49
"Lehet hogy negyedszer, vagy ötödször is el kellene még neked is olvasnod az eredeti beírásomat.:)"
Megtettem : egy szóval sem írsz arról hogy este hogyan kapcsolod ki a gépet ....
Ha elárulod ( tőled szokatlan módon ) az alkalmazott mérési módszert akkor nem lettél volna szegényebb ha az alkalmazásról is írsz pár mondatot .
Megtettem : egy szóval sem írsz arról hogy este hogyan kapcsolod ki a gépet ....
Ha elárulod ( tőled szokatlan módon ) az alkalmazott mérési módszert akkor nem lettél volna szegényebb ha az alkalmazásról is írsz pár mondatot .
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2024 március 19, 17:07
Írta: TBS-TEAM Dátum 2024 március 19, 17:07
Millió féle léptetővezérlő van olcsóbb drágább stb...
Még egy gépen belűl sem egyformát használnak a legtöbbször.
A bekapcsolásnál vagy sikerűl a vezérlőnek jól elindulni
ahogy te gondolod vagy nem.
a teszt videoban nem a leggagyibbat használtam mégis 1-2 egész lépést is képes volt ellépni bekapcsolásnál, hiába van belső hurok is benne, a video láttán semmilyen szögfügvény sem kell
ahhoz, hogy megállapítsam, hogy HOME poziciót fel kell venni, nincs mese, se mellébeszélés se semilyen hokuszpokusz kikapcsolás előtt.
Ez a technológia ilyen tudomásúl kell venni ennyit tud.
Még egy gépen belűl sem egyformát használnak a legtöbbször.
A bekapcsolásnál vagy sikerűl a vezérlőnek jól elindulni
ahogy te gondolod vagy nem.
a teszt videoban nem a leggagyibbat használtam mégis 1-2 egész lépést is képes volt ellépni bekapcsolásnál, hiába van belső hurok is benne, a video láttán semmilyen szögfügvény sem kell
ahhoz, hogy megállapítsam, hogy HOME poziciót fel kell venni, nincs mese, se mellébeszélés se semilyen hokuszpokusz kikapcsolás előtt.
Ez a technológia ilyen tudomásúl kell venni ennyit tud.
Cím: Re:Léptetőmotor
Írta: Robsy1 Dátum 2024 március 19, 19:29
Írta: Robsy1 Dátum 2024 március 19, 19:29
Miért kell neked itt folyamatosan szakmai butaságokat írnod?[#conf][#csodalk]
1. meséd, tévhited:
"A bekapcsolásnál vagy sikerűl a vezérlőnek jól elindulni
ahogy te gondolod vagy nem."
Ezzel szemben a műszaki igazság: szinte minden léptetőmotor vezérlő H pozícióba áll bekapcsoláskor auto start logikájának köszönhetően.
2. meséd, tévhited:
"a teszt videoban nem a leggagyibbat használtam mégis 1-2 egész lépést is képes volt ellépni bekapcsolásnál"
Ezzel szemben a műszaki igazság: És??? Persze, hogy ellép, ha nem a bekapcsolási H ponton kapcsolod ki, mert elpiszkálod a teszthez nem is tartozó idétlen step jeleiddel.
Azt bezzeg nem fogtad fel, pedig még szabad szemmel is látszik a videódon is, hogy 2 vagy több egymást követő bekapcsolási pozíció, tűpontosan azonos, mert világítani fog a H Led, ha van ilyened is hozzá. Ha meg nincs hozzá ilyen kijelző, attól még a vezérlő teszi a dolgát, és H-val indul a bekapcsolást követően. A beírásom lényege pont az volt, hogy mekkora segítség tud az lenni az egész CNC használatunk során, ha ezt a VALÓSÁG pozíció állapotot egyből látom is Led-en.
3. meséd, tévhited:
"hogy megállapítsam, hogy HOME poziciót fel kell venni, nincs mese, se mellébeszélés se semilyen hokuszpokusz kikapcsolás előtt."
Ezzel szemben a műszaki igazság az, hogy a vezérlő bekapcsoláskor mindig felveszi a H pozíciót, legfeljebb mivel eddig ezt nem is tudtad, nem is érted, így nem is használod ki ezt a tudását.
4. meséd, tévhited:
"Ez a technológia ilyen tudomásúl kell venni ennyit tud."
Ezzel szemben a műszaki igazság az, bizony ez a H képessége a léptetőmotoros hajtásnak megvan, a mezei szervónak meg nincs meg, tehát többet tud ilyen szempontból. Azaz tévedés alapon lenézni ezt a "technológiát" nem kellne, mert pont ebben többet tud a szervónál (és még sok minden másban is).
1. meséd, tévhited:
"A bekapcsolásnál vagy sikerűl a vezérlőnek jól elindulni
ahogy te gondolod vagy nem."
Ezzel szemben a műszaki igazság: szinte minden léptetőmotor vezérlő H pozícióba áll bekapcsoláskor auto start logikájának köszönhetően.
2. meséd, tévhited:
"a teszt videoban nem a leggagyibbat használtam mégis 1-2 egész lépést is képes volt ellépni bekapcsolásnál"
Ezzel szemben a műszaki igazság: És??? Persze, hogy ellép, ha nem a bekapcsolási H ponton kapcsolod ki, mert elpiszkálod a teszthez nem is tartozó idétlen step jeleiddel.
Azt bezzeg nem fogtad fel, pedig még szabad szemmel is látszik a videódon is, hogy 2 vagy több egymást követő bekapcsolási pozíció, tűpontosan azonos, mert világítani fog a H Led, ha van ilyened is hozzá. Ha meg nincs hozzá ilyen kijelző, attól még a vezérlő teszi a dolgát, és H-val indul a bekapcsolást követően. A beírásom lényege pont az volt, hogy mekkora segítség tud az lenni az egész CNC használatunk során, ha ezt a VALÓSÁG pozíció állapotot egyből látom is Led-en.
3. meséd, tévhited:
"hogy megállapítsam, hogy HOME poziciót fel kell venni, nincs mese, se mellébeszélés se semilyen hokuszpokusz kikapcsolás előtt."
Ezzel szemben a műszaki igazság az, hogy a vezérlő bekapcsoláskor mindig felveszi a H pozíciót, legfeljebb mivel eddig ezt nem is tudtad, nem is érted, így nem is használod ki ezt a tudását.
4. meséd, tévhited:
"Ez a technológia ilyen tudomásúl kell venni ennyit tud."
Ezzel szemben a műszaki igazság az, bizony ez a H képessége a léptetőmotoros hajtásnak megvan, a mezei szervónak meg nincs meg, tehát többet tud ilyen szempontból. Azaz tévedés alapon lenézni ezt a "technológiát" nem kellne, mert pont ebben többet tud a szervónál (és még sok minden másban is).
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2024 március 19, 20:11
Írta: TBS-TEAM Dátum 2024 március 19, 20:11
Gondolkozz el azon mennyire életszerü, hogy van egy CNC géped és van min. 3db hajtásod amin van 3db LED ami jelzi az egész lépés poziciót.
A vezérlők a kapcsoló szekrényben vannak bezárva. (ott a helyük) Nem az asztalon.
Futtatod a programot, műszak vége.
Megállítod a program futását, mert még a felével sem végzett.
Nekiállsz tengelyenként visszafele léptetni míg ki nem gyulad a LED egyessével (Dehát a szekrényben van ne felejtsük el).
Hogyan rögzíted hogy hol jártál?
Felirod a G kod sorát?
Dehát elmozdítottad a tengelyeket így a G kod sor nem a helyes poziciót mutatja.
Felirod a tengelyek pozicióját?
Kikapcsolod a gépet.
Reggel bekapcsolod.(Bízva abban, hogy nem mozdult el egyik tengely sem).
Beirod a poziciókat és hagy szóljon, lesz ami lesz.
Nem macerás ez?
Mekkora a hibalehetőség?
A vezérlők a kapcsoló szekrényben vannak bezárva. (ott a helyük) Nem az asztalon.
Futtatod a programot, műszak vége.
Megállítod a program futását, mert még a felével sem végzett.
Nekiállsz tengelyenként visszafele léptetni míg ki nem gyulad a LED egyessével (Dehát a szekrényben van ne felejtsük el).
Hogyan rögzíted hogy hol jártál?
Felirod a G kod sorát?
Dehát elmozdítottad a tengelyeket így a G kod sor nem a helyes poziciót mutatja.
Felirod a tengelyek pozicióját?
Kikapcsolod a gépet.
Reggel bekapcsolod.(Bízva abban, hogy nem mozdult el egyik tengely sem).
Beirod a poziciókat és hagy szóljon, lesz ami lesz.
Nem macerás ez?
Mekkora a hibalehetőség?
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2024 március 19, 20:26
Írta: TBS-TEAM Dátum 2024 március 19, 20:26
A teszthez egy Mitsubishi FX3U PLC bizosította a Step jeleket
és semmit sem babráltam el.
és semmit sem babráltam el.
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2024 március 19, 21:45
Írta: TBS-TEAM Dátum 2024 március 19, 21:45
Nem gondoltam volna, hogy több mint 430-an nézték meg a videót 11 óra alatt. [#integet2]
Jól szórakoztam a mai napon, mégis csak József nap volt.[#nevetes1]
Jól szórakoztam a mai napon, mégis csak József nap volt.[#nevetes1]
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2024 március 19, 21:53
Írta: Vetesi75 Dátum 2024 március 19, 21:53
Nem értem, miért macerás referenciát venni bekapcsolást követően. Én évek óta megvagyok ezen funkció nélkül is. [#nemtudom] Ha élesben tűpontosan vissza kell állni, meg vannak rá a bejáratott praktikák.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2024 március 21, 08:16
Írta: svejk Dátum 2024 március 21, 08:16
A tűpontos az milyen? :)
A hajszálpontost még úgy ahogy tudom értelmezne a pár századostól a tized tartományig, mert ugye ott a méret a hajszíntől is függ.
A hajszálpontost még úgy ahogy tudom értelmezne a pár századostól a tized tartományig, mert ugye ott a méret a hajszíntől is függ.
Cím: Re:Léptetőmotor
Írta: Robsy1 Dátum 2024 március 21, 08:49
Írta: Robsy1 Dátum 2024 március 21, 08:49
A "tűpontos" egy általános kifejezés, amikor valami szabadszemmel is elég pontos dolognak látszik, kisebb az eltérés mint egy tűhegynek az átmérője.
Nyilván létezik az a mérőrendszer, pl.a Robsy lineáris vagy körmozgás kinematikai mérések is ilyenek, ami ezt számszerűen is kimutatja, persze a mérési felbontáson belül.
Majd ezen méréseimről teszek fel képeket ide is.
Nyilván létezik az a mérőrendszer, pl.a Robsy lineáris vagy körmozgás kinematikai mérések is ilyenek, ami ezt számszerűen is kimutatja, persze a mérési felbontáson belül.
Majd ezen méréseimről teszek fel képeket ide is.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2024 március 21, 09:16
Írta: svejk Dátum 2024 március 21, 09:16
No de ugye a tűhegy nem egzakt mert az elméleti tűhegynek 0 az átmérője, egy precíz tűnek pár század, de egy zsákvarrótűnek akár 0,5 mm is.
Ezért a Te írásodban furcsa volt olvasni.
De kötözködés: Off
Ezért a Te írásodban furcsa volt olvasni.
De kötözködés: Off
Cím: Re:Léptetőmotor
Írta: torrente Dátum 2024 március 24, 19:40
Írta: torrente Dátum 2024 március 24, 19:40
Sziaszto, valakinek van tapasztalata a hibrid szervóval kapcsolatban? A HBS86H-s szetteket nézegetem, viszont nagyobbacsak léptetőim vannak itthon. Van 'olcsó kinai' enkóderem is (még dc szervóval használtam), van esély, hogy működjön a HBS vezérlővel?
Köszönöm..!
Köszönöm..!
Cím: Re:Léptetőmotor
Írta: Motoros Dátum 2024 március 25, 07:34
Írta: Motoros Dátum 2024 március 25, 07:34
Pedig létezik "tűpontos" bemérő eszköz. Egy ügyfél arra kért, hogy készítsek neki olyan 1/8 collos szárral, kb 10 fokos kúpszöggel "tűhegyes" bemérő eszközt amit befog a maró patronjába és X és Y irányba a munkadarabon meglévő jelölésre ezzel be tud állni sac/kb, optikai kukucskálós módszerrel.
Még után is rendelt ebből a high tech eszközből mivel Z be beletörte a munkadarabba a keményfém hegyet[#nyes]
Ez nem off mert léptetőmotoros volt a gép[#nyes]
Még után is rendelt ebből a high tech eszközből mivel Z be beletörte a munkadarabba a keményfém hegyet[#nyes]
Ez nem off mert léptetőmotoros volt a gép[#nyes]
Cím: Re:Léptetőmotor
Írta: Scythian Dátum 2024 április 09, 21:06
Írta: Scythian Dátum 2024 április 09, 21:06
Üdv Urak!
Volna valakinél elfekvőben néhány Berger lahr VD5 meghajtó, illetve VRDM3913/50 stepper?
Toni
Volna valakinél elfekvőben néhány Berger lahr VD5 meghajtó, illetve VRDM3913/50 stepper?
Toni
Cím: Re:Léptetőmotor
Írta: Robsy1 Dátum 2024 április 20, 14:39
Írta: Robsy1 Dátum 2024 április 20, 14:39
Aki léptetőmotort használ a CNC gépében, jó ha tudja, hogy bizonyos motor fordulatszámoknál erős rezonancia jelenség léphet fel. Ezt a problémát mutatja az alábbi kép, ami a Robsy kinematikai mérőrendszer (http://www.robsy.hu/te32/tem32.htm) segítségével készült.
Jól megfigyelhető, hogy ilyenkor mekkora sebesség kilengései vannak a motornak, így bizonyos időszakaszokban hátrafelé is forog. Ennek következményeként a megtett lineáris út is az adott mellékhajtás tengelyen erőteljesen hullámos, cik-cakkos lesz.
Közben meg ezeknél az eseteknél a vezérlésen egy szép állandó előtolási sebesség látható az állandósult szakasznál NULLA gyorsulás mellett. Mekkora hazugságok ezek [#conf], hiszen láthatjátok, pontról pontre minden változik, az extrém nagy +- gyorsulás meg csak igen ritkán nulla.
Szóval jó ha mindenki kb. tudja, hol vannak a léptetőmotor hajtásáú CNC gépénél ezek a kritikus fordulatszámok, és ezeket lehetőleg el kell kerülni, amikor használjuk a gépet gyártásra.
(http://www.robsy.hu/te32/robsy-pva4.gif)
Jól megfigyelhető, hogy ilyenkor mekkora sebesség kilengései vannak a motornak, így bizonyos időszakaszokban hátrafelé is forog. Ennek következményeként a megtett lineáris út is az adott mellékhajtás tengelyen erőteljesen hullámos, cik-cakkos lesz.
Közben meg ezeknél az eseteknél a vezérlésen egy szép állandó előtolási sebesség látható az állandósult szakasznál NULLA gyorsulás mellett. Mekkora hazugságok ezek [#conf], hiszen láthatjátok, pontról pontre minden változik, az extrém nagy +- gyorsulás meg csak igen ritkán nulla.
Szóval jó ha mindenki kb. tudja, hol vannak a léptetőmotor hajtásáú CNC gépénél ezek a kritikus fordulatszámok, és ezeket lehetőleg el kell kerülni, amikor használjuk a gépet gyártásra.
(http://www.robsy.hu/te32/robsy-pva4.gif)
Cím: Re:Léptetőmotor
Írta: sarktibsi Dátum 2024 április 20, 14:57
Írta: sarktibsi Dátum 2024 április 20, 14:57
Az jó megoldás lehet? Csökkentem az áramerősséget, plusz növelem a felbontást.
Cím: Re:Léptetőmotor
Írta: Vetesi75 Dátum 2024 április 20, 23:27
Írta: Vetesi75 Dátum 2024 április 20, 23:27
Az egy jó dolog. ha egy motort "kopaszon" vizsgálunk, de mi sül ki abból, ha a motor által egy rugózott pl. tengelykapcsolót egy tömeggel, ami szabadon áll és (rugózik) még nem is a tömegközéppontjában van megtámadva, gerjesztünk? OK.lehet valamilyen szinten modellezni, de hogy a valósághoz köze sem lesz, az garantálható...
Cím: Re:Léptetőmotor
Írta: Robsy1 Dátum 2024 április 21, 07:36
Írta: Robsy1 Dátum 2024 április 21, 07:36
Az áram csökkentése nyomaték csökkenéssel is jár, így ez nem járható, ha szükség van a motor nyomatékára a hajtásrendszerben. A felbontás növelés csökkenti a rezonanciát, de 3200 step/ford felett már ez se segít sokat.
A J-vel lehet még elhangolni, csökkenteni a rezonanciát, persze ennek meg motordinamikai képesség csökkenés az ára.
Szóval ha egy léptetőmotor vezérlő/motor páros adott sebesség pontokon berezonál, nincs könnyű dolgunk. Jobb eleve olyan "párost" keresni, ami minél kedvezőbb rezonancia görbét mutat a 0-3 1/s fordulatszám tartományban. A méréseim alapján ugyanis nagy minőségi különbség van motor/vezérlő kapcsán.
A J-vel lehet még elhangolni, csökkenteni a rezonanciát, persze ennek meg motordinamikai képesség csökkenés az ára.
Szóval ha egy léptetőmotor vezérlő/motor páros adott sebesség pontokon berezonál, nincs könnyű dolgunk. Jobb eleve olyan "párost" keresni, ami minél kedvezőbb rezonancia görbét mutat a 0-3 1/s fordulatszám tartományban. A méréseim alapján ugyanis nagy minőségi különbség van motor/vezérlő kapcsán.
Cím: Re:Léptetőmotor
Írta: Robsy1 Dátum 2024 április 21, 07:47
Írta: Robsy1 Dátum 2024 április 21, 07:47
Minden mérésnek van értelme, az üresjáratinak is.
Ugyanis ha az egyik vezérlő/motor páros csak tized akkora rezonanciával működik, mint egy másik páros, az éppen 10-szer jobb.
A Robsy kinematikai mérőrendszerrel a hajtáslánc bármelyik pontján mérhetsz, pl. az elmozduló szánodat 1 kW forgácsolás közben is, na ezek az igazi valós tesztek.
Annak sincs akadálya, hogy rugózott gerjesztő rendszerrel mérjél be egy hajtást, hiszen azon a ponton ahol mérsz, a kapott út, sebesség, gyorsulás függvények mindig valósak lesznek a mérési hibán belül.
Ugyanis ha az egyik vezérlő/motor páros csak tized akkora rezonanciával működik, mint egy másik páros, az éppen 10-szer jobb.
A Robsy kinematikai mérőrendszerrel a hajtáslánc bármelyik pontján mérhetsz, pl. az elmozduló szánodat 1 kW forgácsolás közben is, na ezek az igazi valós tesztek.
Annak sincs akadálya, hogy rugózott gerjesztő rendszerrel mérjél be egy hajtást, hiszen azon a ponton ahol mérsz, a kapott út, sebesség, gyorsulás függvények mindig valósak lesznek a mérési hibán belül.
Cím: Re:Léptetőmotor
Írta: sarktibsi Dátum 2024 április 21, 08:23
Írta: sarktibsi Dátum 2024 április 21, 08:23
Na én pont ezért vásároltam egy spéci tengelyvezérlő modult. (meg más miatt is) Ez a szoftver már kitudja rajzolni a számított szerszámpályát meg a tényleges pályavonalat is ,( kell neki egy encoder ) így látható a különbség , főleg ara vagyok kíváncsi szabadon és terhelés közben milyen ábrát mutat.
Sajnos az időhiány miatt még mindig nem tudok vele foglalkozni.
A körmös tengelykapcsolókra én azt tudnám javasolni: próbálkozni kell, van piros , sárga , és zöld betétes gondolom a rezgés elnyelő képességük sem egyforma. De láttam már olyat is amikor a motortartó konzolt is műanyagból csinálták. (de szerintem az öntvény is jó , annak is van rezgés elnyelő képessége)
Sajnos az időhiány miatt még mindig nem tudok vele foglalkozni.
A körmös tengelykapcsolókra én azt tudnám javasolni: próbálkozni kell, van piros , sárga , és zöld betétes gondolom a rezgés elnyelő képességük sem egyforma. De láttam már olyat is amikor a motortartó konzolt is műanyagból csinálták. (de szerintem az öntvény is jó , annak is van rezgés elnyelő képessége)
Cím: Re:Léptetőmotor
Írta: Marosi István Dátum 2024 május 17, 23:12
Írta: Marosi István Dátum 2024 május 17, 23:12
Ez hatalmas ötlet, rendeltem is egyet, aztán ha jól működik akkor mindegyik tengelyre ilyet teszek. Ha volt már akkor bocsi, de ritkán járok erre, bosszantanak Tibor okoskodásai... [#csodalk]
https://vi.aliexpress.com/item/1005006656868232.html?spm=a2g0o.productlist.main.49.4cbb1a35QZobbJ&algo_pvid=df1ca47a-3e74-443c-8af6-6b95e0eb02c5&algo_exp_id=df1ca47a-3e74-443c-8af6-6b95e0eb02c5-24&pdp_npi=4%40dis%21HUF%217561.91%217561.91%21%21%21149.28%21149.28%21%402103251317159800364708921ec6d6%2112000037940100652%21sea%21HU%212834917458%21&curPageLogUid=c7ch96GMYXUt&utparam-url=scene%3Asearch%7Cquery_from%3A
https://vi.aliexpress.com/item/1005006656868232.html?spm=a2g0o.productlist.main.49.4cbb1a35QZobbJ&algo_pvid=df1ca47a-3e74-443c-8af6-6b95e0eb02c5&algo_exp_id=df1ca47a-3e74-443c-8af6-6b95e0eb02c5-24&pdp_npi=4%40dis%21HUF%217561.91%217561.91%21%21%21149.28%21149.28%21%402103251317159800364708921ec6d6%2112000037940100652%21sea%21HU%212834917458%21&curPageLogUid=c7ch96GMYXUt&utparam-url=scene%3Asearch%7Cquery_from%3A
Cím: Re:Léptetőmotor
Írta: dtb Dátum 2024 május 17, 23:37
Írta: dtb Dátum 2024 május 17, 23:37
Ezt már korábban kitárgyalták sokan, sőt, volt itt készült verzió is, amit lehetett rendelni a készítőtől (olvass visszafelé), de alapvetően egyetlen korlátja van ezeknek, a max. amper... Ha rákeresel az alin, kicsit drágábban ugyan, de vannak closed loop-os kittek, én azokat javasolnám inkább.
A letilt gombot ismered? :-)
A letilt gombot ismered? :-)
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2025 március 03, 10:12
Írta: ANTAL GÁBOR Dátum 2025 március 03, 10:12
Egy barátom épít egy automatikát . Egy kb 12 Nm es motor direktben forgat egy 5 ös golyósorsót A driver árama a névleges áram mintegy fele ( szándékosan ) . A golyósanyás szán időnként (szándékosan!) ütköztetve van . Ilyenkor
"kerreg " a motor . Arra lennék kíváncsi hogy a kerregésnél van e hátramozdulás és ha van, annak mekkora az értéke . Nem tudom hogy mekkora a mikrolépések száma de legyen pl féllépéses az üzem . Egy számolt érték : ha 1.8 fok a vissza -lépés akkor 25 mikron . Remélem Robsy is olvassa
"kerreg " a motor . Arra lennék kíváncsi hogy a kerregésnél van e hátramozdulás és ha van, annak mekkora az értéke . Nem tudom hogy mekkora a mikrolépések száma de legyen pl féllépéses az üzem . Egy számolt érték : ha 1.8 fok a vissza -lépés akkor 25 mikron . Remélem Robsy is olvassa
Cím: Re:Léptetőmotor
Írta: Robsy1 Dátum 2025 március 03, 13:00
Írta: Robsy1 Dátum 2025 március 03, 13:00
Van hátra mozdulás "kerregéskor", ami bizonyos időpillanatokban elérheti a 4.5 fokot is az ütközőtől visszafelé mérve.
Egyébként szakmailag elég durva dolog ezt a hajtást ütköztetni, mert csak a statikus rázóerő elérheti a ~7540N erőt, amit a mechanikának viselni kell a golyorsó/anyástól mindenestül.
Egyébként szakmailag elég durva dolog ezt a hajtást ütköztetni, mert csak a statikus rázóerő elérheti a ~7540N erőt, amit a mechanikának viselni kell a golyorsó/anyástól mindenestül.
Cím: Re:Léptetőmotor
Írta: ANTAL GÁBOR Dátum 2025 március 03, 13:41
Írta: ANTAL GÁBOR Dátum 2025 március 03, 13:41
Köszönöm a gyors választ : Bizisten nem én csinálom . Egy 1.5*17mm es Ko szalag tompahegesztéséről van szó ami nem akar a barátomnak sikerülni ( Összetolja a szalagpárt ami ütközik és ahogy írod képes visszamozdulni .) Én arra gyanakszom hogy nem tud kialakulni a jó kontakt , vagyis nem alakul ki a megfelelő hegesztőáram . A trafó rövidzárási árama 11kA ( ! ) . Ahhoz jó kontakt kellene. Az iparban ( pl fűrész szalagok végtelenítése estén pneumatikus összeszorítást alkalmaznak )
Cím: Re:Léptetőmotor
Írta: Robsy1 Dátum 2025 március 03, 16:06
Írta: Robsy1 Dátum 2025 március 03, 16:06
Szívesen segítek neki a megoldásban. Nyugodtan add meg neki a telefonszámomat.
Cím: Re:Léptetőmotor
Írta: Scythian Dátum 2025 június 04, 13:49
Írta: Scythian Dátum 2025 június 04, 13:49
Üdv Urak!
2db Berger Lahr WRD3913 stepper volna valakinél elfekvőben?
Esetleg szintén BL WS-5-9 5 fázisú meghajtó, vagy WDP5?
Toni
2db Berger Lahr WRD3913 stepper volna valakinél elfekvőben?
Esetleg szintén BL WS-5-9 5 fázisú meghajtó, vagy WDP5?
Toni
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2025 július 19, 11:45
Írta: svejk Dátum 2025 július 19, 11:45
Tudtok-e olyan bipoláris léptetőmotor vezérlőről amely tud 4096-os encoder visszacsatolást fogadni?
4 A-es motorhoz kellene.
4 A-es motorhoz kellene.
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2025 július 19, 13:14
Írta: TBS-TEAM Dátum 2025 július 19, 13:14
Idézetet írta: svejk Dátum 2025 július 19, 11:45Tudtok-e olyan bipoláris léptetőmotor vezérlőről amely tud 4096-os encoder visszacsatolást fogadni?
4 A-es motorhoz kellene.
Jelosztóval lehet hamarabb célba érsz:
https://vi.aliexpress.com/i/1005002947312581.html?gatewayAdapt=glo2vnm#nav-specification
vagy egy 1000-es encoder cserével.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2025 július 19, 16:11
Írta: svejk Dátum 2025 július 19, 16:11
Idézetet írta: TBS-TEAM Dátum 2025 július 19, 13:14Jelosztóval lehet hamarabb célba érsz:
https://vi.aliexpress.com/i/1005002947312581.html?gatewayAdapt=glo2vnm#nav-specification
vagy egy 1000-es encoder cserével.
Köszi!
Ááá... annyit nem ér, 2 Nm-es Nanotec motorok... csak olyan jól egybe van építve a mechanika.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2025 július 19, 16:16
Írta: svejk Dátum 2025 július 19, 16:16
Idézetet írta: TBS-TEAM Dátum 2025 július 19, 13:14Jelosztóval lehet hamarabb célba érsz:
https://vi.aliexpress.com/i/1005002947312581.html?gatewayAdapt=glo2vnm#nav-specification
vagy egy 1000-es encoder cserével.
Egyébként használtatok már ilyet? Van valami bővebb leírásod hozzá?
Más helyre lehet tudnám használni.
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2025 július 19, 16:55
Írta: TBS-TEAM Dátum 2025 július 19, 16:55
Idézetet írta: svejk Dátum 2025 július 19, 16:16Egyébként használtatok már ilyet? Van valami bővebb leírásod hozzá?Szervo meghajtóból jövő encoder jel osztására kelett UC300ETH UCCNC-hez pozicionálásra.
Más helyre lehet tudnám használni.
A szervomeghajtó nem tudta az osztást, egy az egyben adta ki a szervomotor jeleit, amit
az UC300ETH nem tudta lekezelni csak kb~60KHz-ig.
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2025 július 19, 16:58
Írta: TBS-TEAM Dátum 2025 július 19, 16:58
Idézetet írta: svejk Dátum 2025 július 19, 16:11Köszi!
Ááá... annyit nem ér, 2 Nm-es Nanotec motorok... csak olyan jól egybe van építve a mechanika.
Komplett:
https://vi.aliexpress.com/item/1005002822611894.html?spm=a2g0o.productlist.main.33.1ff7AFY4AFY4Kr&algo_pvid=2c7204a4-d449-4a9c-b7bb-b6322fdf28bf&algo_exp_id=2c7204a4-d449-4a9c-b7bb-b6322fdf28bf-32&pdp_ext_f=%7B%22order%22%3A%2230%22%2C%22eval%22%3A%221%22%7D&pdp_npi=4%40dis%21HUF%214224.36%214224.36%21%21%2111.98%2111.98%21%40211b81a317529370278952603e658a%2112000043248514778%21sea%21HU%216275204850%21X&curPageLogUid=m7Uk9oLmNJTw&utparam-url=scene%3Asearch%7Cquery_from%3A
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2025 július 19, 18:44
Írta: svejk Dátum 2025 július 19, 18:44
Idézetet írta: TBS-TEAM Dátum 2025 július 19, 16:55Szervo meghajtóból jövő encoder jel osztására kelett UC300ETH UCCNC-hez pozicionálásra.
A szervomeghajtó nem tudta az osztást, egy az egyben adta ki a szervomotor jeleit, amit
az UC300ETH nem tudta lekezelni csak kb~60KHz-ig.
A másik hely amit említettem nekem is hasonló, Fanuc főhajtás 1024-et ad, így 2500 1/min felett nem valós az UCCNC kijelzése.
A szinkron menetfúráshoz nem kell mert az jellemzően 1000 fordulat alatt megy.
Ha van bővebb leírásod szívesen venném.
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2025 július 19, 18:47
Írta: svejk Dátum 2025 július 19, 18:47
Idézetet írta: TBS-TEAM Dátum 2025 július 19, 16:58Komplett:
https://vi.aliexpress.com/item/1005002822611894.html?spm=a2g0o.productlist.main.33.1ff7AFY4AFY4Kr&algo_pvid=2c7204a4-d449-4a9c-b7bb-b6322fdf28bf&algo_exp_id=2c7204a4-d449-4a9c-b7bb-b6322fdf28bf-32&pdp_ext_f=%7B%22order%22%3A%2230%22%2C%22eval%22%3A%221%22%7D&pdp_npi=4%40dis%21HUF%214224.36%214224.36%21%21%2111.98%2111.98%21%40211b81a317529370278952603e658a%2112000043248514778%21sea%21HU%216275204850%21X&curPageLogUid=m7Uk9oLmNJTw&utparam-url=scene%3Asearch%7Cquery_from%3A
Hmm... hogy neked mindenre van Alis válaszod! :)
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2025 július 19, 20:22
Írta: TBS-TEAM Dátum 2025 július 19, 20:22
Idézetet írta: svejk Dátum 2025 július 19, 18:44A másik hely amit említettem nekem is hasonló, Fanuc főhajtás 1024-et ad, így 2500 1/min felett nem valós az UCCNC kijelzése.
A szinkron menetfúráshoz nem kell mert az jellemzően 1000 fordulat alatt megy.
Ha van bővebb leírásod szívesen venném.
Előkerestem: :Q
DIP kapcsolók: Denominátor
Binary kódolású
pl: 5= 00000101
Cím: Re:Léptetőmotor
Írta: svejk Dátum 2025 július 20, 08:40
Írta: svejk Dátum 2025 július 20, 08:40
Idézetet írta: TBS-TEAM Dátum 2025 július 19, 20:22Előkerestem: :Q[#worship]
DIP kapcsolók: Denominátor
Binary kódolású
pl: 5= 00000101
Cím: Re:Léptetőmotor
Írta: Gergoke Dátum 2025 október 27, 19:12
Írta: Gergoke Dátum 2025 október 27, 19:12
Üdv! Adott a képen látható stepper,a szinkron/ step felirat bíztatónak tűnik rajta. Lehet e ezeket a csodákat szervoként használni ( és ha igen milyen vezérlővel)
(https://i.postimg.cc/t16P60VK/IMG-20251026-210819.jpg) (https://postimg.cc/t16P60VK)
(https://i.postimg.cc/t16P60VK/IMG-20251026-210819.jpg) (https://postimg.cc/t16P60VK)
Cím: Re:Léptetőmotor
Írta: TBS-TEAM Dátum 2025 október 27, 20:55
Írta: TBS-TEAM Dátum 2025 október 27, 20:55
Idézetet írta: Gergoke Dátum 2025 október 27, 19:12Üdv! Adott a képen látható stepper,a szinkron/ step felirat bíztatónak tűnik rajta. Lehet e ezeket a csodákat szervoként használni ( és ha igen milyen vezérlővel)
(https://i.postimg.cc/t16P60VK/IMG-20251026-210819.jpg) (https://postimg.cc/t16P60VK)
6 vezetékes mezei léptető motor.
Cím: Re:Léptetőmotor
Írta: Gergoke Dátum 2025 október 29, 09:23
Írta: Gergoke Dátum 2025 október 29, 09:23
Idézetet írta: TBS-TEAM Dátum 2025 október 27, 20:556 vezetékes mezei léptető motor.Köszönöm! Akkor marad a dobozban.